Sisteme de Reglare Cu Orientare Dupa Camp

of 12
Transcript of Sisteme de Reglare Cu Orientare Dupa Camp
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
1/31
Capitolul IV
Sistemul de reglare cu orientare după câmp
În capitolele precedente am prezentat unele noţiuni teoretice despre elementele de bază aunui sistem de acţionare cu DSP a maşinii asincrone . În continuare vom prezenta un exemplu practic de sistem de acţionare a unui motor de curent alternativ asincron.
4.1 Prezentarea generală a sistemului de reglare
În ultimele ani domeniul elementelor de comandă electrică controlabilă a cunoscut o dezvoltarerapidă datorită în deosebi avantajelor semiconductoarelor, atât în electronica de putere cât şi în prelucrarea semnalelor. ntroducerea noilor te!nolo"ii a permis dezvoltarera acţionărilor de curentalternativ cu disipaţie de putere mult redusă şi cu structuri de control cu acurateţe mare. #lementelede comandă electrice au devenit mult mai $ine şi exacte, în sensul că acum nu e vorba numai decontrolul tensiunii şi curentului de alimentare de curent continuu ci şi de controlul tensiunilor şicutenţilor pe trei $aze, aşa numitul control vectorial.
Controlul scalar
%ontrolul scalar înseamnă că variabilele sunt controlate numai în mărime, atât reacţia cât şi semnalulde comandă sunt proporţionale cu mărimile de curent continuu. &etoda de control scalar poatecomanda numai $recvenţa stratorului $olosind tensiune sau curent pentru comandă. 'ariind tensiuneastatorială proporţional cu $recvenţa, cuplul se menţine constant. %urba de viteză(cuplu se obţine prinalunecarea axei de re$erinţă de alun"ul axei $recvenţei.
)ceastă metodă *'+$ are ca avantaj simplicitatea ei care necesită capacitate de calcul scăzut. Întredezavantajele sale majore putem aminti- timp de reacţie $oarte mare la sc!imbarea sarcinii, e$icienţăscăzută.
Controlul vectorial
%ontrolul vactorial are în vedere nu numai mărimea ci şi $aza variabilelor implicate. Sunt utilizatematrici şi vectori pentru reprezantarea cantităţilor de control. )ceastă metodă ia în considerare nunumai sările succesive ci şi ecuaţiile matematice care descrie motorul. )st$el rezultatul controluluiobţinut are caracteristică dinamică mai bună la variaţiile cuplului la sarcină în tot domeniul de
viteză.%ea mai utilizată metodă de control vectorial este controlul cu orientare după câmp. eoria $azorilor spaţiali este metoda prin care sunt tratate ecuaţiile motorului. Deşi motorul de inducţie are ostructură destul de simplă, modelul său matematic este destul de complicat datorită cuplării$actorilor dintre un mare număr de variabile şi datorită neliniarităţilor.
%omanda cu orientare după câmp o$eră soluţionarea acestei probleme evitând rezolvarea ecuaţiilor şi atin"ând un control e$icient cu dinamică bună.
/0
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
2/31
)ceastă metodă necesită mai multe calcule decât sc!ema cu controlul scalar. )cesa poate $i rezolvatutilizând module de calcul ca procesorul di"ital de semnal *DSP şi au avantajele următoar-
capacitatea de cuplu total la viteze reduse
comportare dinamică mai bună
e$icienţă mărită în $iecare punct pe alun"ul domeniul vitezei
control separat asupra cuplului şi a $luxului
operaţii în patru cadrane
1.2.2 3e"ulatoare clasice de curent alternativ
Structurile de control al motoarelor de curent alternativ în "eneral aplică statorului trei tensiunisinusoidale, spaţial decalate cu 2455. În majoritatea cazurilor calsice, "enerarea celor treiunde sinusoidale este in$luenţat şi de caracteristicilor electromecanice a motorului şi amodelului staţionar ec!ivalent a motorului. 3e"larea pare a $i trei re"lări separate a treimotoare mono$azate. Dezavantajele majore a acestui sistem-
&odelul maşinii şi caracteristicile utilizate sunt valabile numai în stare staţionară. )ceastaduce la supratensiuni şi curenţi instabili. )ces lucru cauzează nu nunai per$ormanţe scăzute ci şiine$icienţa conversiei de putere. %omponentele de putere trebuie să $ie supradimensionaţi dincauza cutenţilor tranzitorii.
Di$icultăţi majore în controlul variabilelor cu re$erinţă sinusoidală- re"ulatoarele P nu pot să$acă re"lare sinusoidală $ără a deteriora re$erinţa sinusoidală, şi re"ulatoarele speci$ici introducz"omot în sistem.
6u avem sistem de ec!ilibrare între cele trei $aze. 6u avem în vedere interacţiunea între celetrei $aze.
Structura de control trebuie să $ie speci$ică tipului de motor $olosit.
%ontrolul cu orientare după câmp elimină aceste dezavantaje şi măreşte e$icacitatea re"lării.
1.2.4 %ontrolul cu orientare după câmp
%ontrolul cu orientare după câmp constă în controlul asupra curenţilor statorulul reprezentaţivectorial. )cest control are la bază proiecţia cu care putem trans$orma sistemul tri$azat dependent detimp şi de viteză în sistem de două coordonate invariant la timp*d,7. )ceastă trans$ormare conducela un sistem asemănător cu cea a motoarelor bi$azate.
%um prezentat şi în capitolul 4 maşinile cu control cu orientare după câmp au nevoie dedouă constante ca re$erinţă de intrare- componenta cuplului *coordonata 7 şi componenta de $lux*coordonata d. Structura de comandă prelucrează cantităţi electrice instantanee. )cesta dă acurateţe
controlului, atăt în stare staţionară cât şi în cele tranzitorii. De acea controlul cu orientare după câmprezolvă problemele scemei clasice datorită $aptului că- $acilitează atin"erea re$erinţei constante şi$acilitând $olosirea controlului direct a cuplului. &enţinând amplitudinea $luxului rotoric la ovaloare $ixă, avem relaţie liniară dintre cuplu şi componenta de cuplu a cutentului statoric, ast$el putând controla cuplul modi$icând componenta cuplului vectorului curentului statoric.
//
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
3/31
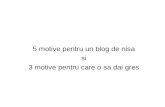
Schema generală de reglare cu metoda controlului cu orientare după câmp
Dia"rama din $i"ura 1.2 prezintă sc!ema de bază a controlului cu orientare după câmp-
Sunt măsureate două curenţi de $ază. Prin trans$ormare obţinem două componente *d,7 care suntcomparate cu re$erinţa *d cu componenta de $lux, 7 cu componenta de cuplu. Din acest punct devedere, această structură de control are avantajul că poate $i $olosit pentru control atât pentru maşinasincronă cât şi pentru cea asincronă prin simpla sc!imbare a re$einţei de $lux şi obţinând poziţia$luxul rotoric. %um în motoarele sincrone cu ma"net permanent $luxul rotoric este $ix nu trebuiecreat, ast$el componenta de re$erinţă a $luxului putâd $i şi zero. )cest lucru rezolvă unul dinter dezaventajele controlului clasic o$erind $acilitatea de portabilitate între maşina sincronă şi asincronă.
Semnalul de comandă a cuplului *is7 poate $i o ieşire dintr(un re"ulator de viteză dacă $olosimcontrol cu orientare după câmp pentru controlul vitezei. eşirile re"ulatorului de curent sunt aplicate blocului de trans$ormare de coordonate. %a ieşire vom avea componentele a tensiunii statorice înre$erinţă orto"onală $ixă, care este aplicat ca intrări la "eneratorull P8&. eşirile acestui bloc suntintrările pentru comanda invertorului care alimentează motorul.
%erinţa principală pentru comnada cu orientere după câmp este cunoaşrerea curenţilor pe două $azeşi poziţia $luxului rotoric. 9uncţionarea corectă a controlului depinde în mare măsură de măsurareaexctă a acestor curenţi.
%unoaşterea poziţiei $luxului rotoric este esenţial controlului cu orientare după câmp. Dacă aici apar erori $luxul rotoric nu poate $i identi$icat cu axa d si va cauza erori în determinarea componentelor curenţilor statorici.
Datorită controlul cu orientare după cîmp a devenit posibil controlul direct şi separat a $luxului şi acupluilui a maşinii asincrone tri$azate de curent alternativ. &aşinile de curent alternativ controlate cumetoda controlului cu orientare după câmp posedă toate avantajele maşinilor de curent continuu-control instantaneu asupra cantităţilor separate permiţând un control cu acurateţe mare atît în stari
/:
9i" 1.2 sc!ema de principiu a controlului cu orientare după câmp
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
4/31
tranzitorii cât şi în stări staţionare. În plus pe lân"ă aceste avantaje, maşinile de curent alternativcomandate cu această metodă rezolvă şi problemele de comutaţie mecanică existente la maşinile decurent continuu.
Procesorul numeric de semnal &S;45941;, având o putere %P< mare şi peri$erice dedicatecontrolului multilateral a motoarelor, $ace ca din punct de vere a conversiei puterii şi a rentabilităţii
motoarelor, motoarele de curent alternativ conmandate cu orientare după câmp să $ie maiavantajoase decât cele de curent continuu.
4.2 DSPul !n ac"ionări electrice
#endin"ele !n controlul motoarelor
Studiile de piaţă arată că majoritatea aplicaţilor industriale utilizează motoare de curentalternativ. &otivul pincipal ar $i- $iabilitatea, robusteţea, costul scăzut, e$icienţă mare. Deşi $olosireamaşinilor de inducţie au şi dezavantaje, acestea constă în "eneral în di$icultatea controlabilităţiidatorat complexităţii modelului lor matematic, al comportării lor nonlinear în timpul e$ectului de
saturaţie şi oscilaţiile parametrilor electrice dependente de in$luenţa $izică a temperaturii.%ontrolul tradiţional a motoarelor, a $ost proiectat cu componente analo"ice, uşor de proiectat şiimplementat cu componente relativ ie$tine. )ceste sisteme au mai multe dezavantaje- înbătrânirea şitemperatura ridicată putând cauza variaţia sistemului necesitând ajustarea lor re"ulată pentrumenţinerea per$ormanţelor.
Sistemele numerice o$eră avantaje majore $aţă de cele analo"ice. 'ariaţiile rapide sunteliminate datorită $aptului că majoritatea $uncţiilor sunt e$ectuate numeric. &odi$icările ulterioareimplementării poate $i uşor de soluţionat prin modi$icarea so$tului şi numărul pieselor constructiveeste redus semni$icativ datorită $aptului că sistemul di"ital poate soluţiona multe probleme sin"ur.
Procesarele numerice de semnal asi"ură viteză ridicată, rezoluţie mărită pentru reducerea costurilor.)si"urarea unui control mai precis pentru atin"erea unor per$ormanţe de consum şi radiaţie,înseamnă deseori mărirea numărului de calcule e$ectuate, $olosirea unor instrucţiuni implementate înDSP care măresc viteza calculelor.
În "eneral precesoarele numerice de semnal cu vir"ulă $ixă sunt pre$erate în controlulmotoarelor din două motive. În primul rând DSP(urile cu vir"ulă $ixă sunt mai ie$tine decît cele cuvir"ulă mobilă. În al doilea rând petru că rata dinamică de 2/ biţi este su$icient în cele mai multecazuri din aplicaţi. Dacă este nevoie, rata dinamică poate $i înbunătăţită în procesoarele cu vir"ulă$ixă, $olosind calcule cu vir"ulă mobilă în so$t=are.
1.4.2 )vantajele $olositii re"ularoarelor cu procesoare di"itale de semnal
După cum am văzut per$ormanţele motoarelor de curent alternativ sunt $oarte dependente de
controlul $olosit. 3e"ulatorul cu DSP permite $olosirea unor al"oritmi de timp real so$isticate cât şicontrolul $ără senzori.
%a urmare un procesor puternic ca de exemplu re"ulatorul cu DSP are rolul de a $avoriza-
reducerea costurilor printr(un control e$icient în tot domeniul de viteză implicânddimensionarea corectă a circuitelor
e$ectuarea unor al"oritmi de nivel înalt care reduce oscilaţiile cuplului rezultând atenuareavibraţiilor şi creşterea duratei de viaţă
/>
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
5/31
reducerea armonicilor $olosind al"oritmi speci$ici, reducând costurile introducerii $iltrelor
"enerarea în timp real a unui pro$il de re$erinţă şi traiectorii de mişcare aproape de celoptimal, rezultând per$ormanţe mărite
controlul invertoarelor de putere şi "enrearea de P8&
asi"urarea unui re"ulator pe un c!ip
Pe lîn"ă aceste $acilităţi pentru un re"laj avansat un controler per$ormant poate să-
controleze sisteme complexe şi cu variabile multiple $olosind metode inteli"ente ca reţeleneuronale şi lo"ica $uzz?
realizeze control adaptiv@ DSP(ul având capacitatea de a monitoriza şi a controla simultansistemul. )l"oritmi adaptivi dinamici se adaptează pe ei însuşi în timp real variaţiilor sistemului.
asi"ură dia"nostizarea cu monitorizarea cu 99 şi analiza spectrală. Prin observareaspectrului vibraţiilor mecanice motivele de de$ectere pot $i prevăzute.
producă $iltre care elimină z"omotele provenite din rezonanţă mecanică
1.4.4. 3ealizarea structurii de re"lare cu DSP
Structura tipică de control a motoarelor necesită un meiz de procesor şi un set de blocuri peri$erice $uncţionale, ca inter$aţă dinter procesorul di"ital şi semnale exterioare. Alocul principal deinter$aţare între un convretor pentru motor de curent alternativ "eneratorul de semnale P8& şisistemele de conversie D)%. &ai sunt necesare pentru controlul în timp real blocurile di"itale deintrare+ieşire paralele, inter$aţa de comunicare serială, =atc!do" timer şi timerul de evenimente.
Deşi cuplul maxim pe curent este produs dacă maşina este alimentată cu un set de curenţi delinie balansaţi, sincronizate cu poziţia absolută a rotorului. &icroprocesoarele moderne o$eră aceastăcapacitate de calcul pe lân"ă un preţ acceptabil.
Structura de re"lare prezentat în $i"ura 1.4 este alcătuit din următoare elemente- Procesorul de semnal *DSP care realizează $uncţiile de calcul*încercuit cu linie întreruptă
%onvertorul static de $recvenţă care*%S9 care comandă mototul şi incorporează şi $uncţiilede conversie a semnalelor- convertorul analo" di"ital *)D% este $olosit pentru ac!iziţionareacurentului şi convertorul di"ital analo" *D)% comandă cu tensiune convertorul static de$recvenţă
motorul cu encoder
/B
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
6/31
4.$ Prezentarea pachetului %S&24$ pentru programarea DSPului
)cest capitol o$eră prezentare a Cit(ului &S41; &otion Starter it, cât şi &%41; &otion%ontrol it. )ceste pac!ete sunt Cit(uri ce permite experimentarea $olosirii procesorului numeric desemnal &S;45941; în aplicaţii de control di"ital a mişcării. itul &S41; este mai mult orientatspre evaluarea capabilităţilor procesorului &S;45941; şi o$eră şi un mediu de dezvoltare a
pro"ramelor. itul &%41; este o structură completă pentru acţionări electrice, include unconvertor de putere şi un motor ceea ce este plat$orma de bază pentru aplicaţiile de control amişcării.
Se pot inter$aţa cu uşurinţă module de putere cu placa procesorului DSP pritnr(o ma"istralăuniversală de control al mişcării *&%(A
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
7/31
'ig. 4.$ Dia"rama bloc a plăcii &S41;
)ceste conectoare permit conectarea şi controlul modulelor de putere externe de tipuri di$erite şi cu
puteri di$erite, adaptate la di$erite aplicaţii de acţionări electrice.
1.;.2 Prezentarea plăcii &S41;
În $i"ura 1.1 este reprezentat sc!ema de bază a plăcii &S41; .
Sunt puse în evidenţă componentele principale, conectorii şi jumper(ii plăcii.
%onectorul serial *E0-
Pentru a conecta placa &S41; la calculator avem nevoie de un cablu serial 3S(4;4.&S41; conţine un conector DAB 3S(4;4 mamă *E0. %onectarea plăcii &S41; cucalculatorul s(a realizat cu un cablu DAB 3S(4;4.
%onectorul &%(A pini.
%onectorul suplimentar &%(A
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
8/31
iturile pentru &S41; şi &%41; conţin şi aplicaţii so$t=are, &S8641; în cazul &S41; şi&%8641; în cazul Citului &%41;( acestea o$eră o inter$aţă de comunicaţie cu calculatorul.9olosind modulul de comunicaţie cu calculatorul, se poate accesa &S41;.
Pro"ramele de comunicare dintre &S41; şi P%, sunt &H641; a$lat pe modulul &S41; şi&H6P%41; a$lat pe P%.
%()24$ J pentru o comunicaţia serială cu P%(ul utilizează inter$aţa S% a procesorului 941;.
Pro"ramul este structurat pe două nivele-
$uncţii de comunicţie lo=(level- iniţializare S%, rutine de întrerupere S% pentru transmisie
şi recepţie, citirea unui caracter *bit din S%, transmiterea unui caracter către S% $uncţii de comunicţie !i"!(level- permit utilizatorului- să scrie, respectiv să citească dateîn+din memoria de pro"ram *P& sau de date *D&, să execute un pro"ram de la o adresăspeci$ică din memoria de pro"ram, să in$luenţeze protocolul de comunicaţie.
%()PC24$ J interpretorul de comenzi pentru P%, care permite utilizatorului- să a$işeze conţinutulmemorie de pro"ram şi a celei de date, să modi$ice conţinutul acestor tipuri de memorie, săevalueze şi să ajusteze conţinutul memoriei de date, să in$luenţeze protocolul de comunicare, să
:4
9i". 1.1 Sc!ema de bază a plăcii &S41;
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
9/31
încarce pro"rame în memoria 3)&, să salveze date într(un $işier din &S41;, să execute un pro"ram, etc.
Controlul %i*cării + mediul "ra$ic DSP&H o$eră posibilitatea unei analize asupra controluluidi"ital al mişcării, asupra variabilelor DSP printr(o prezentare on(line, sau o$(line a datelor stocateanterior.
1.;.4 )plicaţii. Structura aplicaţiei de re"lare a motorului
În continuare vom prezenta structura şi $unctiile a unor aplicaţii de acţionare care suntincluse în plat$orma &%864;1. )plicaţia permite evaluarea unei structuri de control numeric almotorului de curent alternativ asincron.
Principii de ,ază ale sistemului de ac"ionare cu %C-I)24$
Pac!etul &S41; reprezintă o plat$ormă completă pentru aplicaţii de evaluare a acţionărilor cu DSP. Placa &%41; conectată la convertorul de putere )%P&:05, împreună cu motorulasincron poate $i $olosită la implementarea unei structuri complete de acţionare. )st$el este posibilă
nu numai evaluarea c!ipului DSP, dar şi proiectarea şi testarea di$eriţilor al"oritmi de re"lare.Plat$orma so$t=are &%8641; conţine aplicaţii de acţionare rulabile, pentru Citul motorului.
%onstruit pe un Cernel "eneral de re"lare în timp real, aplicaţia implementează re"lareanumerică, a vitezei motorului. Pentru comanda motorului de curent alternativ in$ormaţiile primite desezorii Kall incluşi în pac!etul motorului sunt $olosite pentru comutarea tensiunilor de $ază aleinvertorului.
)plicaţia poate $i utilizată la două nivele de experienţă al utilizatorului-
La nivel de începător, aceste aplicaţii pot $i $olosite pentru a avea primul contact cu oaplicaţie de re"lare.
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
10/31
Două bucle de re"lare sunt prezente- una mai rapidă, de re"lare a curentului *cu perioada deesantionare imlicită de 255μs şi o buclă mai lentă, de re"lare a vitezei *cu perioada deesantionare implicită de 2 ms.
oate calculele matematice sunt $ăcute pe baza reprezentării $racţionale M20 *2/ biţi. oatenumerele sunt considerate a $i în $ormatul M20, excepţie de la această re"ulă $ac rezultatele
intermediare, considerate în $ormat M;2 *;4 biţi. De asemenea reprezentarea valorile"eneratorului de re$erinţă utilizează reprezentarea M;2.
La toate calculele matematice se aplică o tratare speci$ică a depăşirilor de domeniu. Deasemenea procedura de control este adaptată la tratarea speci$ică a situaţiile de depăşire adomeniului.oate buclele de control implementate utilizează controllere proporţional(inte"ratoare *P discrete. )ceste re"ulatoare utilizează coe$icienţi de control scalaţi cu scopul dea acoperii un domeniu cât mai lar" al parametrilor de control.
Din punct de vedere al structurii de pro"ram, aplicaţia este con$i"urată ca în $i"ura 1.0. )ceastăstructură reprezintă în practică o abordare modulară pentru con$i"uraţia de re"lare standard.
În partea superioară a structurii $uncţionale prezentate modulul de comunicaţie va transmite cătresistemul de acţionare comenzile de acţionare, "enerate de un alt calculator *P% sau în aplicaţiiindustriale, un alt modul de control, conectat printr( o ma"istrală N$ield busO la modulul DSP. )cestmodul de comunicaţie este reprezentat la nivelul aplicaţiei de interpretorul de comenzi demonitorizare încorporat al plăcii &S41;.
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
11/31
"enerare a re$eriţei va impune valoarea de re$erinţă, în acest caz, re$erinţa de viteză. În cazulaplicaţiei propuse nu avem nevoie de acest modul şi ca urmare nu este implementat.
Alocul "enerator de re$erinţă va impune valoarea de re$erinţă a motorului, în cazul nostru viteza dere$erinţă.
3e$erinţa motorului este intrarea în blocul de re"lare, conţinând re"ulatorul de viteză . )cest bloc va
"enera re$erinţa de curent 7i în sistem bi$azat, care $urnizează cuplul motorului.Alocul de re"lare a curentului implementează controlul curentului. eşirile acestui bloc de re"laresunt semnalele P8& de re$erinţă. În $inal, semnalele P8& sunt $olosite în blocul de "enerareP8& pentru comanda invertorului de putere. În aplicaţie este $olosit te!nica de "enerare P8&simetrică.
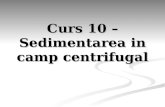
În $i"ura 1./ se prezintă conexiunile de bază între di$erite componente necesare des$ăşurăriiaplicaţiei. După cum se poate observa di$eritele straturi pot $i scoase în evidenţă din aceastăcon$i"uraţie, care reprezintă mai mult sau mai puţin con$i"uraţiile Cernelului unei acţionari de bază.
)plicaţia va $olosi următoarele resurse ale procesorului &S;45941;-
a nivelul inter/e"ei I0(
pentru comunicare serială se va $olosi inter$aţa S%
pentru măsurarea $azelor curentului se $oloseşte inter$aţa )D%
pentru comanda invertorului se $oloseşte "eneratorul de semnal P8& *se $oloseşte imer 2de pe c!ip(ul DSP
pentru controlul curentului şi al vitezei $olosim FP timer 4
pentru măsurarea poziţiei $olosim M#P * se $oloseşte timer ; de pe c!ip(ul DSP
:0
Fig 4.6 – conexiunile dintre blocurile
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
12/31
În $i"ura 1.0 se observă că "eneratorul P8& porneşte conversia )+D pe baza măsurărilor speci$icede curent.
a nivelul #Isunt implementate următoarele $uncţii de întrerupere-
3 trs J modulul de transmisie serial J activat de întreruperea x6
3 rec J modulul de recepţie serial J activat de întreruperea 3x6
3 )D% J modulul )+D de conversie al mărimilor măsurate
3 crt J rutina de întrerupere pentru controlul curentului. )ctivată prin imer 4
3 ctrl J rutina de întrerupere pentru controlul vitezei. )ctivată prin imer 4
a nivelul I0( avem nevoie de următoarele variabile-
Au$$ trs J bu$$er de transmisie pentru datele care urmează a $i transmise prin canalulde comunicaţie
Au$$ rec J bu$$er de recepţie pentru datele recepţionate prin canalul de comunicaţie
meas J valoarea curentului măsurat în motor
J valoarea de re$erinţa a curentului din motor
meθ J valoarea măsurată a poziţiei motorului
34 + valoarea de re$erinţă a poziţiei motorului
1.;.4.2 )plicaţie demonstrativă de acţionare cu maşină de curent alternativ
)plicaţia demonstrativă de acţionare cu maşină de curent alternativ implementează o metodă bloc de control al comunicaţiei pentru a conduce motorul. )plicaţia demonstrativă este livrată ca oaplicaţie &S;45941;, inclusă într(un proiect .&H al pro"ramului DSP&H.
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
13/31
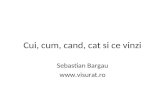
Structura de ,ază al schemei de control a aplica"iei
În $i"ura 1.: este prezentată sc!ema de control necesară în controlul aplicaţiei. )ceasta se bazează pe măsurarea a două $aze ale curentului şi a poziţiei rotorului. Alocul estimator de viteză este unsimplu bloc di$erneţial. %urenţii de $ază măsuraţi, ia şi i b, sunt trans$ormaţi în componentele de
re$erinţă pentru stator, ids şi i7s. )poi, bazat pe in$ormaţiile despre poziţie, aceste componente sunttrans$ormate în componente directe ale rotorului şi componente ale 7uadranturii, ide şi i7e.%ontrollerul vitezei şi curentului sunt controllere discrete de viteză şi respectiv, curent. Aloculoscilator de control în tensiune *'%H implementează so$t=are trans$ormarea de coordonate şicalculul tensiunii de re$erinţă a $azelor * Pcs
P
bs
P
as v,v,v aplicate invertorului. Practic, cele / ieşiriP8& de comparare ale controllerului DSP sunt direct conduse de pro"ram, în $uncţie de acestere$erinţe ale tensiunii.
%azul când componenta directă de re$erinţă a curentului, *dei , este setată la 5 corespunde mişcăriimaşinii în domeniul normal de viteze, $ără a lua în considerare o posibilă operaţiune de slăbire acâmpului.
Semnalul de re$erinţă al vitezei este obţinut utilizând "eneratorul de re$erinţă al DSP&H. 'iteza dere$erinţa poate $i setată şi în mediul 8indo=s. De asemenea parametrii de control pot $i setaţi înDSP&H tot în mediul 8indo=s.
9i". 1.: J sc!ema de control pentru aplicatie
Parametrii *i varia,ile utilizate de aplicatii5. Pentru controlul curentului
o $actorul proporţional pQ5.0
o $actorul inte"ral iQ5.0
o perioada etalon !crtQ5.2ms
6. Pentru controlul vitezei
::
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
14/31
o $actorul proporţional pQ020
o $actorul inte"ral iQ255
o perioada etalon !crtQ5.2ms
oţi aceşti parametrii sunt introduşi la nivelul pro"ramului DSP&H. )cesta va scala automatvalorile coe$icienţilor de control în vederea convertirii acestora în reprezentarea $racţională M20.'aloarea perioadei de eşantionare e utilizată pentru a evalua valoarea de comparare şi valoarea perioadei pentru timer 4 al controllerului DSP.
În timpul testului se pot selecta di$erite variabile de pro"ram, care urmează a $i stocate încontrollerul DSP, urmând a $i vizualizate "ra$ic.
Semni$icaţia celor mai importanţi parametrii şi variabile -
Parametrii mi*cării
RisRid coe$icient inte"ral pentru controllerul de curent id
RisRi7 coe$icient inte"ral pentru controllerul de curent i7 RisRom" coe$icient inte"ral pentru controllerul de viteză
RpsRid coe$icient proporţional pentru controllerul de curent id RpsRi7 coe$icient proporţional pentru controllerul de curent i7 RpsRom" coe$icient proporţional pentru controllerul de viteză
RctrlRcrtRper valoarea perioadei de control a curentului
RctrlRpsRper valoarea perioadei de control a vitezei
Rs$RRid $actor de scalare pentru coe$icientul inte"ral al controllerului de curent id Rs$RRi7 $actor de scalare pentru coe$icientul inte"ral al controllerului de curent i7
Rs$RRom" $actor de scalare pentru coe$icientul inte"ral al controllerului de viteză Rs$RPRid $actor de scalare pentru coe$icientul proporţional al controllerului de curent id Rs$RPRi7 $actor de scalare pentru coe$icientul proporţional al controllerului de curent i7 Rs$RPRom" $actor de scalare pentru coe$icientul proporţional al controllerului de viteză
Varia,ilele mi*cării
RelectricRpos un"!iul poziţiei electrice scalat pentru o perioadă electrică
R!all variabilă care combină senzorii de ieşire Kall
RiRa $aza curentului a
RiRalp!a componenta directă a curentului din stator RiRb $aza curentului b
RiRbeta componenta 7uadrantală a curentului din stator
RiRd componenta directă a curentului din rotor
RiRdRre$ componenta de re$erinţă directă a curentului din stator
RiR7Rre$ componenta de re$erinţă 7uadrantală a curentului din stator
:>
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
15/31
RiR7 componenta 7uadrantală a curentului din rotor
Ro$$setRadRc!R1 %ompensarea măsurată pe canalul 1 al )+D *utilizată pentru $aza măsuratăa curentului a
Ro$$setRadRc!RA %ompensarea măsurată pe canalul A al )+D *utilizată pentru $azamăsurată a curentului b
Rom"Rre$ viteza de re$erinţă a maşinii
Rom" viteza maşinii *estimată după variaţia poziţiei
Rposition Rposition
Rt!eta un"!iul poziţiei electrice în $ormat M20
RuRaRre$ tensiunea de re$erinţă al $azei a
RuRalp!aRre$ tensiunea de re$erinţă directă din stator
RuRbRre$ tensiunea de re$erinţă al $azei b
RuRbetaRre$ tensiunea de re$erinţă 7uadrantală din stator
RuRcRre$ tensiunea de re$erinţă al $azei c RuRbRre$ tensiunea de re$erinţă directă din rotor
RuR7re$ tensiunea de re$erinţă 7uadrantală din rotor
1.;.4.4 se obţine pentru re$erinţă şi viteza maşinii măsurată*estimată, curentul de $ază şi componenta de cuplu a curentului corespunzător setărilor implicite ale
aplicaţiei. Dacă utilizatorul doreşte să încarce pro"ramul şi să execute mişcările, după uploadulrezultatelor, trebuie obţinute variaţii ale semnalelor asemănătoare cu $ormele de re$erinţă.
:B
9i". 1.> )plicaţia 2
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
16/31
Hdată ce $uncţionarea sistemului a $ost testată, pot $i analizate şi alte $ormele de re$erinţă şi alţi parametrii a re"ulatorului.
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
17/31
1.;.4.; )lte aplicaţii pentru maşina asincronă
5plica"ia I%VC78S
)ceastă aplicaţie impementează o re"lare vectorială a vitezei, cu $eedbacC de la un encoder, pentrumaşina asincronă.
Dia"rama bloc
Sc!ema aplicaţiei de control &'%R#S este prezentat în $i"ura 1.B. %um putem observa sc!ema decontrol se bazează pe măsurarea curenţilor pe două $aze şi măsurarea vitezei motorului cu unencoder.
Alocul de compensaţie a alunecării este $olosit pentru estimarea poziţiei câmpului statoric.
%urenţii de $ază măsurate sunt trans$ormate în re$erinţe statoriale α şi β. După acesta având ladispoziţie in$ormaţiile privind poziţia câmpului, aceste componente sunt trans$ormate în re$erinţărotorică d şi 7.
3e"ulatoarele de curent şi viteză sunt re"ulatoare discrete P. 3e$erinţa de tensiune de $ază aplicatinvertorului este calculat avînd în vedere ieşirile re"ulatorului de curenţi şi in$ormaţiile despre poziţia câmpului.
%um putem vedea re$erinţa curentului direct d este calculat în blocul curentului de ma"netizare bazat pe parametrii sistemului.
3e$erinţa de vitezăeste obţinut $olosind "eneratorul de re$erinţă pusă la dispoziţie de modulul DSP&H;4.
5plica"ia I%VC78P
)ceastă aplicaţie impementează o re"lare vectorială a poziţiei, cu $eedbacC de la un encoder, pentrumaşina asincronă.
>2
9i" 1.B Dia"rama bloc a aplicaţiei &'%R#S
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
18/31
Dia"rama bloc
Sc!ema aplicaţiei de control &'%R#S este prezentat în $i"ura 1.25. %um putem observa sc!ema decontrol se bazează pe măsurarea a două curenţi de $ază şi măsurarea vitezei şi poziţiei motorului cuun encoder.
Alocul de compensaţie a alunecării*Slip %ompensation este $olosit pentru estimarea poziţiei
câmpului statoric.%urenţii de $ază măsurate sunt trans$ormate în re$erinţe statoriale α şi β. După care având în vederein$ormaţiile privind poziţia câmpului, aceste componente sunt trans$ormate în coordonate rotorice dşi 7.
3e"ulatoarele de poziţie, curent şi viteză sunt re"ulatoare discrete P. 3e$erinţa de tensiune de $ază,aplicat invertorului este calculat având în vedere ieşirile re"ulatorului de curenţi şi in$ormaţiiledespre poziţia câmpului.
%um putem vedea re$erinţa curentului direct d este calculat în blocul curentului de ma"netizare bazat pe parametrii sistemului. 'aloarea curentului corespunde mişcării motorului pe un nivelconstant al $luxului
3e$erinţa de poziţie este obţinut $olosind "eneratorul de re$erinţă pusă la dispoziţie de modululDSP&H;4.
1.;.4.1 )plicaţie pentru "enerare a $ormei de undă P8&
)ceaste aplicaţii $ac parte din modulul Procesor #valuation*Proceval din &S41;. ele permitmodi$icarea online a pulsurilor de comandă P8&.
P-% asimetric
FP timer 2 şi cele trei unităţi de comparare din event mana"er sunt pro"ramate pentru a o$eri /semnale P8& în modul P8& asimetric.
)vem posibilitatea-
( setării pentru unităţile de captură
>4
9i" 1.25 Dia"rama bloc a aplicaţiei &'%R#P
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
19/31
( setării perioadei P8&
( modi$icării tensiunii
Pentru a rula aplicaţia trebuie să executăm paşii următori-
2 se setează perioada P8&
4 se setează trei valori de comparare în cele trei unităţi de comparare
; se porneşte aplicaţia cu 3un1 se utilizează un osciloscop pentru a vizualiza cele / ieşiri P8&
0 se repetă pasul 4 modi$icând valorile în timpul rulării aplicaţiei pentru a putea observaon(line e$ectele la tensiunile "enerate
Pro"ramul pentru DSP este conţinut în $işierul p=maRa.asm. Keaderul de asamblare conţinevariabilele şi declaraţiile de $uncţii pentru aplicaţie.
'ariabilele de pro"ram sunt alocate în memoria externă de date începând cu adresa a555!.
a555!- Rstop setată la 2 pentru a termina pro"ramul
a552!- variabilă care stoc!ează perioada P8& ce urmează a $i încărcată în re"istrul de
perioade a imer2a554!- RuRcmpRvalue variabilă care conţine valoarea ce urmează a $i încărcată în re"istrul
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
20/31
a551!- R=RcmpRvalue variabilă care conţine valoarea ce urmează a $i încărcată în re"istrul.
>1
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
21/31
P-% cu vectori spa"iali
Se "enerează tensiune tri$azată utilizând te!nica vectorilor spaţiali. FP timer 2 şi cele trei unităţi decaptură sunt pro"ramate pentru a o$eri / semnale P8&.
nter$aţa "ra$ică o$eră-
( Autoane de control a aplicaţiei
( reprezentarea spaţiul vectorilor ( posibilitatea setării perioadei P8&
( valori prede$inite pentru tensiune
)cţiuni pentru a rula aplicaţia-
2 setarea perioadei P8&
4 setarea parametrilor vectorilor spaţiali
; rularea aplicaţiei cu 3un
1 se utilizează un osciloscop pentru a vizualiza cele / ieşiri P8&
0 se repetă pasul 4 modi$icând valorile în timpul rulării aplicaţiei pentru a putea
observa on(line e$ectele la tensiunile "enerate
'ariabile $olosite de pro"ram-
a555!- Rstop setată în 2 pentru a termina pro"ramul
a552!- Rp=mRperiod stoc!ează perioada P8& care urmează a $i încărcată în re"istrul de
perioade a iemr 2
a554!- RactrRval variabilă care stoc!ează valoarea care urmează a $i depusă în re"istrul
>0
9i" 1.24 Fenerare P8& simetric
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
22/31
de control al acţiunii
a55;!- Rcmpr2Rval variabilă care conţine valoarea care urmează a $i încărcată re"istrul
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
23/31
$eedbacC de tensiune continuă
intrare pentru senzor Kall
port pentru encoder incremental
intrare cu ampli$icare ajustabilă pentru ta!o"enerator analo"
re$erinţă analo" conector de comunicare serială 3S(4;4
alimentare di"itală 0'
alimentare tri$azată pentru maşină de 225' sau 445' mono$azat
protecţie împotriva scurtcircuitului, punerii la pământ, supracurent, supratensiune,supratemperatură şi înc!iderii accidentale a alimentării di"itale
lac!(ul de eroare este tri"erat de $iecare condiţie de eroare, e resetat de controlul di"ital
inter$aţă standard de ma"istrală &% cu unitate de control
Prin inter$aţa de ma"istrală &% unitatea de control poate să-
comandă independent $iecare dintre cele / tranzistoare FA a invertorului
conducă FA(urile din paretea in$erioară conectate la rezistenţa de $rânare
recepteze semnalul de eroare de la etajul de putere atât timp cât toate protecţiile sunt tri"erate
resetează semnalul de eroare
>:
9i". 1.21 %onvertorul )%P&:05 v;.;
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
24/31
citeşte curenţii de la motor şi tensiunea de la ma"istrala de D%
citeşte semnalul de la traductorul Kall
citeşte semnalul ), A a encoderului şi indexul
citeşte $eedbacCul analo" de la ta!o"enerator
citeşte un potenţiomatru de re$erinţă extern cotrolează comunicaţia serială 3S(4;4
La nivelul ma"istralei &%, comanda tranzistoarelor FA şi semnalele de eroare de la etajul de putere sunt de 0', compatibile L+%&HS. Semnalele bipolare, ca curenţii de la maşină, suntaplicate cu un o$$set*decalaj de 4.0' ce înseamnă de pildă că valoarea zero este reprezentat devaloarea 4.0'.
1.1.2 răsăturile de bază
5limentarea
)%P&:05 v;.; necesită două surse de alimentare-
alimentarea di"itală de curent continuu- 0'±0 *1.:0(0.40' pentru lo"ica internă
alimentare de curent alternativ- /5(445' mono($azat sau 05(245' tri$azat pentru maşină
La pornire trebuie aplicat mai înainte alimentarea de curent continuu. La oprire alimentatrea decurent alternativ trebuie întrerupt ultima oară.
Dacă nu este respectat ordine prezentată, tranzistorul de $rânare poate să se înc!ide accidental întimpul perioadelor de tranziţie şi poate strica rezistenţa de $rânare. Protecţia on(board *inte"rat pe placă împotriva tensiunii $oarte mici de alimentarea de curent continuu + înc!iderea accidentală vaevita orice pornire $alsă a FA(urile invertorului.
Conectorul alimentării cu curent continuu +=>
)limentarea cu curent continuu este $olosit pentru condiţionarea şi prelucrarea semnalelor de pe placă a )%P&:05 v;.;. )ceastă alimentare totodată alimentează, prin conectoarele ma"istralei &%,şi alimentarea modulului inteli"ent plasat pe conectoarele ma"istralei &%.
)limentarea lo"ică exterioară trebuie să $ie re"ulată între valorile 1.:0'T0.40'. %ererea de curenta )%P&:05 v;.; este de 2) plus consumul modulului inteli"ent conectat prin &%(bus.
Conectorul alimentării cu curent alternativ +=?
)limentarea de curent alternativ este aplicat redresorului tri$azic inte"rat pe placă şi este distribuit pentru invertor ca curent continuu. %ele trei terminale *3, S şi poate $i conectat ori la alimentareatri$azată ori la o alimentare bi$azată.
%ând $olosim alimentarea dela un sistem tri$azat toate cel trei terminale 3,S şi sunt utilizate.)%P&:05 v;.; acceptă intrări tri$azate între 05 T 245 ' *tensiune pe $ază, între $ază şi nul.Punctul neutru nu e le"at la )%P&:05 v;.;.%înd $olosim sistem mono$azat, din cele trei este $olosit numai două terminale *S, . 3 nu esteconectat. În această con$i"uraţie )%P&:05 v;.; acceptă intrări între /5 T 415 '.
Pentru a absorbi ener"ia "enerată în timpul $rânării maşinii poate $i conectat, în mod opţional orezistenţă de $rânare la pinul EB.
%onexiunea alimentării maşinii conţine şi le"ătură la pământ ce este separat electric de circuitele)%P&:05 v;.;.
>>
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
25/31
8ta@ul de putere
#tajul de putere a lui )%P&:05 v;.; include un invertor tri$azic, circuit de protecţie şi circuitul demăsurare de la D%(bus şi acurenţilor maşinii.
Comanda invertorului tri/azat
nvertorului tri$azat $oloseşte tranzistoare FA cu $recvenţa de comutare până la 41 CKz.
nter$aţa ma"istralei &% al )%P&:05 v;.; include / intrări de comandă P8& care acceptăsemnale compatibile L+%&HS de 0' numite P8&2 până P8&/ prin care unitatea de control poate comande $iecare tranzistor a invertorului.
)%P&:05 v;.; are "enerator de zonă moartă proprie care adau"ă automat 5.> µs timp mort pentrusemnalul P8& următor. )şadar comanda unităţii de control poate să $ie $ără zonă moartă pentrucomunicaţia tranzistoarelor. Hrice timp suplimentar inclus în comanda P8& se adau"ă la cele 5.>µs a convertorului.
Supraâncărcarea pulsurilor P8&, ce ar cauza srăpun"erea FA(ului este rejectat automat de!ard=are. %ând apare un asemenea situaţie tranzistoarele corespunzătoare sunt oprite.
Durata maximă de conducţie a tranzistorului superior este de 05 ms. În acelaş timp FA urilein$erioare pot $i păstrate pornite pe o perioadă nede$inită. Dacă se atin"e limita de timp, FA(ulsuperior corespunzător este oprit $ără a $i "enerat eroare. De acea pro"ramul de control trebuie săevite pornirea a unui tranzistor superior pentru o perioadă mai mare decât 05 de ms.
Semnale de eroare.Protec"ii
#tajul de putere )%P&:05 v;.; include circuite de protecţie pentru di$erite situaţii potenţialdăunătoare. )ceste circuite de protecţie sunt-
scurt circuit+supratensiune între două $aze. )cest circuit monitorizează $luxul curentului princoloana ne"ativă a D%(bus. Protecţia este activat*tri"erat dacă curentul depăşeşte ;5) pentrumai mult de 455 de µs.
Scurt circuit+punere la pământ între $ază şi pământ. )cest circuit monitorizează $luxulcurentului prin bara pozitivă a D%(bus. Protecţia este setat*tri"erat dacă curentul depăşeşte;/) pentru mai mult de 455 de µs.
Supraîncălzirea+ suprasarcina. )cest circuit monitorizează temperatura etajului de putereFA. Protecţia este setat dacă temperatura creşte asupra de 2555%.
Supratensiunea+protecţia la $rânare a ma"istrealei D%. )cest circuit monitrizează tensiuneama"istralei. Protecţia este setat dacă tensiunea depăşeşte 140'.
Subtensiunea+limitarea curentului de pornire. )cest circuit monitrizează şi tensiuneama"istralei. Protecţia este setat dacă tensiunea sa este sub >5' sau mai mic decât >5 dintensiunea de intrarea a redresorului.
Subtensiunea+ înc!iderea accidentală a alimentării de curent continuu. )cest circuitmonitorizează tensiunea de 0' a alimantării de curent continuu. Protecţia este setat dacătensiunea scade sub 1.0' mai mult de 2 ms.
oate aceste protecţii sunt însumate şi $olosite pentru a seta un letc!. )cest letc! păstrează starea deeroare pentru un timp nede$init, evitând orice autooscilaţie*cicluri de porniri şi opriri repetate posibilă, $enomen care ar putea distru"e etajul de putere. Letc!ul de eroare caurează aprindereasemnalului roşu de la L#D4.
>B
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
26/31
%ircuitul de măsurare a curentului la )%P&:05 v;.; $oloseşte două senzori L#& pentru a citicurenţii de la maşină, la $azele < şi '. Parametrii prncipali a senzorului L#& sunt- tipul este L#&KU25(P, curentul citit ±25), tensiunea de ieşire ±1' *la ±25) , banda de trecere 5 T 40 CKz,acurateţea ± 2.
1.1.4 nstalarea, procedura de pornire+oprirePentru a porni )%P&:05 v;.; împreună cu modulul inteli"ent de control, trebuie urmăriturmătoarele etape-
2. %onectăm modulul inteli"ent *placa cu DSP la etajul de putere )%P&:05 v;.; princonectoarele ma"istralei &% *&%(bus E2 şi E4. )vem "rijă ca la corespondenţa pinilor.
4. %onectăm cablul 3S(4;4 *de la P% la modulul inteli"ent *cu DSP
;. Pornim sursa de 0'*care trebuie conectat la intrarea E/ a etajului de putere. Se aprindeL#D(ul verde la placa &S41;.
1. estăm dacă $uncţionează comunicarea cu placa cu DSP *de exemplu cu &onproc41; dinmodulul &S41; prealabil instalat
0. Încărcăm*do=nload pro"ramul în DSP*de exemplu cea $urnizată cu Citul de instalare aconvertorului
/. Pornim alimentarea de curent alternativ. Se aprinde L#D2(ul rosu de K' *!i"! volta"e, careindică prezenţa tensiunii înalte pe D%(bus. După o scurtă vreme putem aude un clicC*de la releulde pornire so$t şi L#D;(ul verde, de operaţii normale trebuie să aprindă.
:. 'eri$icăm statutul L#D(ului de eroare L#D4 a )%P&:05 v;.;. Dacă ledul este aprins, atuncia apărut o condiţie de eroare în timpul pornirii. )ceastă situaţie este normal la o pornire, datoritălimitării protecţiei asupra curentului de pornire şi a limitării de subtensiune. %ondiţia de eroarerămâne remanent în latc!(ul modulului de putere )%P&:05 v;.;, până când nu este resetat.După ce este resetat poate $i aplicată comanda P8& invertorului. )cest puls iniţial trebuie
inclusă în rutina de iniţializare a aplicaţiei.>. Pornim aplicaţia.
B. La oprire-Hprim alimentarea de curent alternativ
25. )şteptăm până când L#D(ul mare roşu se stin"e. )cest lucru durează aproximativ ;5 desecunde, timp necesar pentru descărcarea capacitorului de la D%(bus
22. Hprim alimentarea de curent conrinuu de 0'.
4.: %a*ina asincronă
)o"iuni introductive. Construc"ia *i principiul de /unc"ionare a ma*inii asincrone&aşina asincronă este construită dintr(o armătură primară* statorul şi o armăturăsecundară* rotorul. )rmătura primară care constituie inductorul maşinii cuprinde pac!ete de tolestatorice şi în$ăşurarea tri$azată care se conectează la reţeaua de alimentare a maşinii. )rmăturasecundară care constituie indusul maşinii cuprinde pac!etul de tole rotorică şi o în$ăşurare înc!isă înscurt circuit sau pe o rezistenţă exterioară.
B5
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
27/31
Statorul
%ircuitul electro(ma"netic al statorului constă în tole de oţel electrote!nic pentru a mărirezistivitatea şi micşora pierderile de !isterezis. olele se strân" în direcţie axială în pac!ete de 15(/5 mm "rosime, iar pac!etele sunt separate prin canale de ventilaţie pentru a uşura răcirea maşinii.
Pac!etele de tole statorice se montează în interiorul unei carcase executate din $ontă sau din anumite
aliaje de aluminiu. De o parte şi de alta a carcasei cilindrice în direcţie axială se montează cîte uncapac denumit scut. În$ăşurarea statorică este plasată în crestăturile statorului consolidat cu pene şialimentată de la reţea sau convertor static de $recvenţă.
otorul
%ircuitul ma"netic al rotorului de asemenea din tole de oţel electrote!nic iar pac!etele de tole semontează $ie direct pe arborele maşinii*la puteri mici sau prin intermediul unui butuc. În$ăşurarearotorică plasată in crestăturile rotorice nu este alimentată de la o sursă de tensiune. Puterea electro(ma"netică trans$erată acestei în$ăşurări se realizează prin $enomenul inducţiei electro(ma"netice deunde şi denumirea de motor de inducţie dată motorului asincron.
%onstructiv în$ăîşurarea rotorică se realizează în două tipuri-
în$ăşurarea de tip obişnuit ca a statorului în$ăşurarea de tip colivie, în scurt circuit
În$ăşurarea de tip obişnuit este în "eneral o în$ăşurare tri$azată. rei capete ale în$ăşurării rotoricesunt conectate împreună iare celelalte trei capete sunt conectate la trei inele de contact *colectoaremontate pe arborele maşinii. Pe acest inel se $reacă trei perii care asi"ură le"ătura electrică dintreîn$ăşurarea tri$azată rotorică în mişcare cu reostatul tri$azat $ix exterior. &aşina tri$azată care arerotorul conectat în acest mod se numeşte maşina asincronă cu rotor bobinat sau maşină asincronă cuinel.
În$ăşurarea de tip colivie. La acest tip de în$ăşurare în crestăturile rotorice se montează bare decupru sau aluminiu şi acestea sunt reunite la capete prin inele de scurtcircuitare.
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
28/31
255
2
2⋅
−=
n
nn% s
sau în valori absolute-2
4
2
2
n
n
n
nn s =
−=
în care 4n este turaţia relativă a câmpului învârtitor statoric $aţă de rotor Prin urmare putem scrie-
nn snn −==224 , ( ) 22 n sn −=
3elaţia dintre $recvenţa 2 f a curentului satatoric şi turaţia 2n a acestui câmp $aţă de stator
p
f n 22
/5= . 9recvenţa tensiunilor electro(motoare induse Vn rotorul va $i determinat de turaţia
relativă a câmpului învârtitor $aţă de rotor, adică putem scrie p
f s sn
p
f n 2
2
4
4
/5/5=== adică
24 sf f = .
9recvenţa tensiunii electro(motoare şi deci a curentului rotorului este proporţională cu alunecarea s,deci depinde de turaţia n a maşinii.
Dacă turaţia motorului ar $i e"ala cu turaţia câmpului învârtitor statoric turaţia relativa ar $i zero. Înacest caz cele două sisteme inductor 2n şi indus n vor $i imobile unul $aţă de celălalt. Prin urmarenu se vor induce tensiuni electro motoare în rotor, nu apar curenţi rotorici, $orţe electro(ma"netice şideci cuplu.
%ând 2nn = se spune că maşina $uncţionează la sincronism. uraţia 2n se mai numeşte din aceastăcauză turaţia de sincronism. La pornire 245 nnn =⇒= ceea ce înseamnă 2= s . Prin urmare maşinava $uncţiona ca motor numai pentru 25 nn 5 rot+min,cu curentul de pornire de 1,00), cu $actor de putere =ϕcos 5,>;, cuplul $iind 2,;6m. 6umărul de perec!i de poli este 4pQ2.
1.0.4 Sesizarea poziţiei arborei. #ncoderul
ranzistoarele de putere a punţii trebuie să primească comenzi de conducţie şi de blocare de la unsistem lo"ic care să se sincronizeze cu poziţia rotorului. Semnalele necesare provin dintr(untraductor care poate $i un- resolver, encoder optic, traductor cu e$ect Kall.#ncoderul $urnizează o cantitate mare de in$ormaţii. #ncoderul incremental optic are sc!ema de principiu din $i"ura 1.20.
Într(un encoder optic o lentilă concentrează lumina unui L#D care trece printr(un disc codat de sticlăsau metal, $ixat pe arborele motorului şi printr(un placă $ixă.
B4
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
29/31
&odelul $antelor sau liniilor de pe discul codat de$ineşte $recvenţa şi $orma de undă a trenurilor de pulsuri produs de circuitul captorului de lumină constituit din $otorezistoare.
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
30/31
Sistemul prezentat are o "amă lar"ă de utilizări posibile. )cest sistem este dezvoltat mai ales pentruscopuri didactice şi de testare dar se poate $olosi şi în alte acţionări.
În viitor controlul cu microprocesoare, se va evolua şi mai mult datorită $aptului că se va elabora procesoare mai so$isticate şi dezvoltarea pro"ramelor capabile să exploateze capacitatea de calcul a
procesoarelor se va lăr"i ca urmate a bazei de cunoştinţe deja acumulat.
-
8/20/2019 Sisteme de Reglare Cu Orientare Dupa Camp
31/31
6i,liogra/ia
W2X. ( “Di"ital &otor %ontrol.&S;45%41x Di"ital Si"nal ProcessorO, exas nstruments,Eanuar? 2BBB, %.D.@
W4X. ( N&S;45 DSP(ec!nical n$ormationO, vol.2, exas nstruments, 4555, %.D.
W;X.( N9ield Hrientated %ontrol o$ ;(P!ase )%(&otorsO , exas nstruments, 2BB>.
W1X.( N)%P&:05# Po=er &odule $or ;(p!ase )%(motorsO,
W0X.( N&S4;5941; &otion Starter it Y &otion %ontrol itO, ec!noso$t 4552
W/X.(NDi"ital motion control solution toolbox $or &S4;5941; DSP controllerO
W:X.David 9i"oli, U!en?u Zu (N.
WBX.%ălin, S., Petrescu, F., ăbuş, . ( Sisteme automate numerice. #ditura [tiinţi$ică şi#nciclopedică, Aucureşti, 2B>1.
W25X. Dumitrac!e, . ş.a. J )utomatizări şi ec!ipamente electronice. #ditura Didactică şiPeda"o"ică, Aucureşti, 2BB;.
W22X. ===.tec!noso$t.c!