Sisteme de Reglare Adaptivă
19
Sisteme de reglare adaptivă. MIT
description
referat
Transcript of Sisteme de Reglare Adaptivă
Sisteme de reglare adaptivă. MIT
Sisteme de reglare adaptivă
conceptul de control adaptiv este deseori amintit alături de cel de control robust (amândouă reprezentând metode de reglare a unor sisteme cu parametrii, cu un grad mai mare sau mai mic de incertitudini sau variabili în timp)
proiectarea unui regulator adaptiv este impusă atunci când structura dinamică a procesului este cunoscută, dar pot apărea variaţii mai lente ai parametrilor fizici ai procesului.
regulatoarele adaptive sunt neliniare prin construcţie (indiferent de natura procesului, sistem liniar sau neliniar)
parametrii regulatorului se modifică în mod repetitiv (“online”, în timpul funcţionării), în urma variaţiei parametrilor procesului
în cazul unor modificări parametrice mai lente într-un domeniu mai mare şi necunoscut se impune folosirea regulatoarelor adaptive, mai ales dacă structura procesului este cunoscută.
Tehnici de conducere adaptivă Soluţiile de conducere în cadrul sistemelor adaptive au la
bază două tehnici de adaptare parametrică 1. SAMR (Model Reference Adaptive System MRAS) -
sisteme adaptive cu model de referinţă 2. SAA (Self-tuning Adaptive System SAS) sisteme
adaptive cu autoreglare sau autoacordare Ambele metode adaptive au 2 bucle de reglare:
1. una interioară (denumită buclă ordinară de reglare)2. una exterioară (buclă de ajustare a parametrilor sau
structurii regulatorului având la bază informaţiile funcţionale ale procesului).
Metodele de proiectare a buclei interioare şi tehnicile de ajustare a parametrilor regulatorului adaptiv sunt diferite pentru cele 2 scheme de adaptare
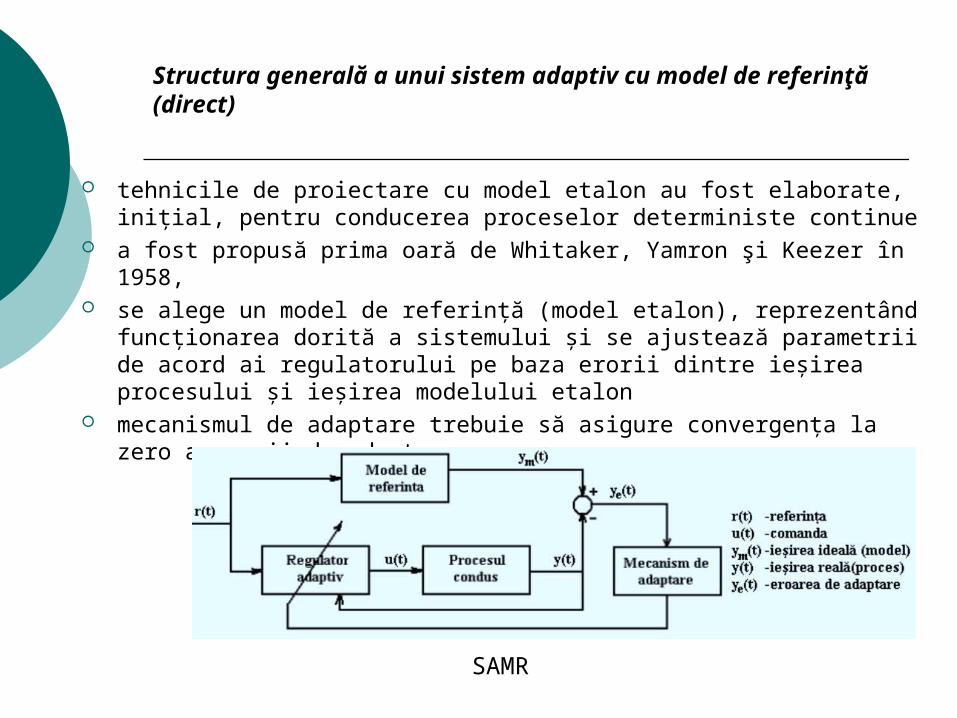
Structura generală a unui sistem adaptiv cu model de referinţă (direct)
tehnicile de proiectare cu model etalon au fost elaborate, iniţial, pentru conducerea proceselor deterministe continue
a fost propusă prima oară de Whitaker, Yamron şi Keezer în 1958, se alege un model de referinţă (model etalon), reprezentând
funcţionarea dorită a sistemului şi se ajustează parametrii de acord ai regulatorului pe baza erorii dintre ieşirea procesului şi ieşirea modelului etalon
mecanismul de adaptare trebuie să asigure convergenţa la zero a erorii de adaptare.
SAMR
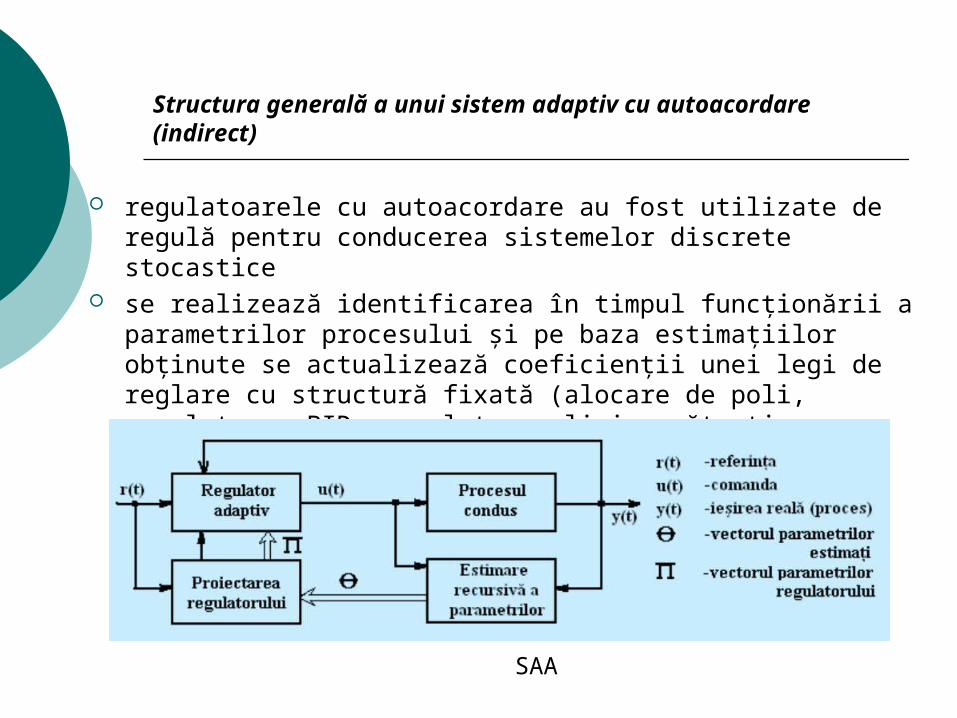
Structura generală a unui sistem adaptiv cu autoacordare (indirect)
regulatoarele cu autoacordare au fost utilizate de regulă pentru conducerea sistemelor discrete stocastice
se realizează identificarea în timpul funcţionării a parametrilor procesului şi pe baza estimaţiilor obţinute se actualizează coeficienţii unei legi de reglare cu structură fixată (alocare de poli, regulatoare PID, regulatoare liniar pătratice, varianţă minimă).
SAA
Dpdv al modalităţii de calcul al parametrilor regulatorului
sisteme adaptive directe - se poate realiza o reparametrizare (directă) a procesului astfel încât acesta să conţină şi parametrii regulatorului se obţine
sisteme adaptive indirecte parametrii regulatorului adaptiv sunt determinaţi pe baza parametrilor estimaţi ai procesului (în mod indirect) şi deci are loc o translaţie de la parametrii procesului la cei ai regulatorului.
SAMR
Blocuri componente:1. procesul condus (cu parametrii necunoscuţi);2. modelul de referinţă (etalon);3. regulatorul adaptiv (cu parametrii ajustabili);4. mecanismul de adaptare (pentru ajustarea
parametrilor regulatorului). Modelul de referinţă din cadrul sistemelor
adaptive de acest tip caracterizează comportarea dorită a sistemului, furnizând la ieşire semnalul ym(t). Astfel, acelaşi semnal de intrare r(t) este aplicat atât modelului ideal cât şi construcţiei regulator adaptiv-proces.
Dificultăţile problemei de conducere adaptivă
instalaţia tehnologică (procesul condus) reprezintă o necunoscută, o “cutie neagră” la care sunt disponibile doar informaţiile funcţionale (semnale de intrare şi ieşire)
Rezulta si din generarea legii de comandă care să asigure că parametrii regulatorului tind către valorile ideale (dorite), ceea ce determină o convergenţă a erorii de adaptare ye la 0.
problema conducerii adaptive a unui proces supus acţiunilor perturbaţiilor constă în determinarea la fiecare moment de timp t a semnalului de comandă u(t) care stabilizează sistemul în buclă închisă şi minimizează abaterea, eroarea de adaptare ye(t) dintre mărimea de ieşire din procesul condus şi mărimea de ieşire din modelul etalon ales, respectiv satisfacerea unor condiţii suplimentare precum:
determinarea semnalului de comandă u(t) se face doar prin utilizarea informaţiilor funcţionale disponibile, pentru intrare în procesul condus {u(τ), τ ≤t} şi pentru ieşire din procesul condus {y(τ), τ≤t};
regulatorul adaptiv este un sistem dinamic cauzal; parametrii ajustabili ai regulatorului să ia doar valori
care să asigure convergenţa din relaţia 1.
Metode de analiză şi sinteză a sistemelor adaptive cu model etalon
metoda gradientului, cunoscută şi sub denumirea de regula MIT (după denumirea universităţii americane în cadrul căreia s-au efectuat primele studii);
metoda bazată pe teoria stabilităţii Lyapunov
Metoda gradientului MIT, este primul pas reuşit de ajustare a parametrilor
regulatorului adaptiv. MIT presupune modificarea în timp a parametrilor regulatorului
adaptiv până când eroarea de adaptare (urmărire) devine cât mai mică (se urmăreşte minimizarea unui criteriu de calitate ce depinde de eroarea de adaptare şi de parametrii regulatorului)
Mecanismul de ajustare a parametrilor regulatorului adaptiv poate fi sintetizat în cazul metodei MIT prin relaţia:
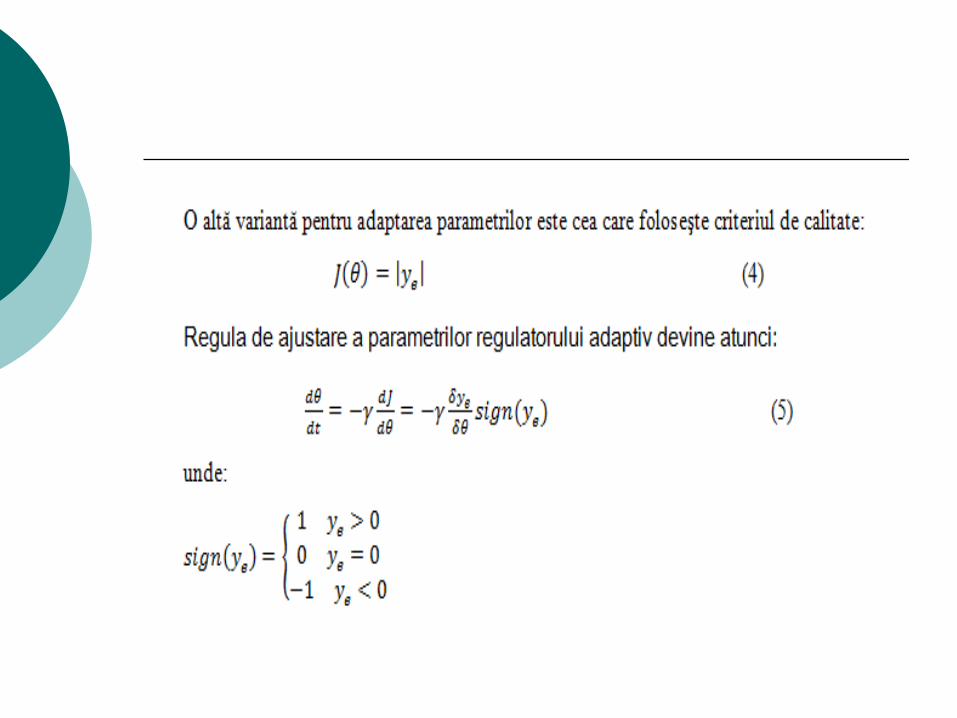
funcţia de sensibilitate a derivatei erorii ∂ye/∂θ determină modul de adaptare a parametrilor fiind un termen esenţial .
se consideră de asemenea că parametrii se modifică mai lent decât variaţiile sistemului.
alegerea vitezei (ratei) de adaptare se face în funcţie de amplitudinea semnalului de intrare
nu se pot preciza exact limitele care asigură stabilitatea sistemului în buclă închisă, metoda de adaptare cu gradient descendent poate conduce la instabilitate se înlocuieşte funcţia de sensibilitate cu o altă metodă de adaptare, mai bună, bazată pe teoria de stabilitate Lyapunov
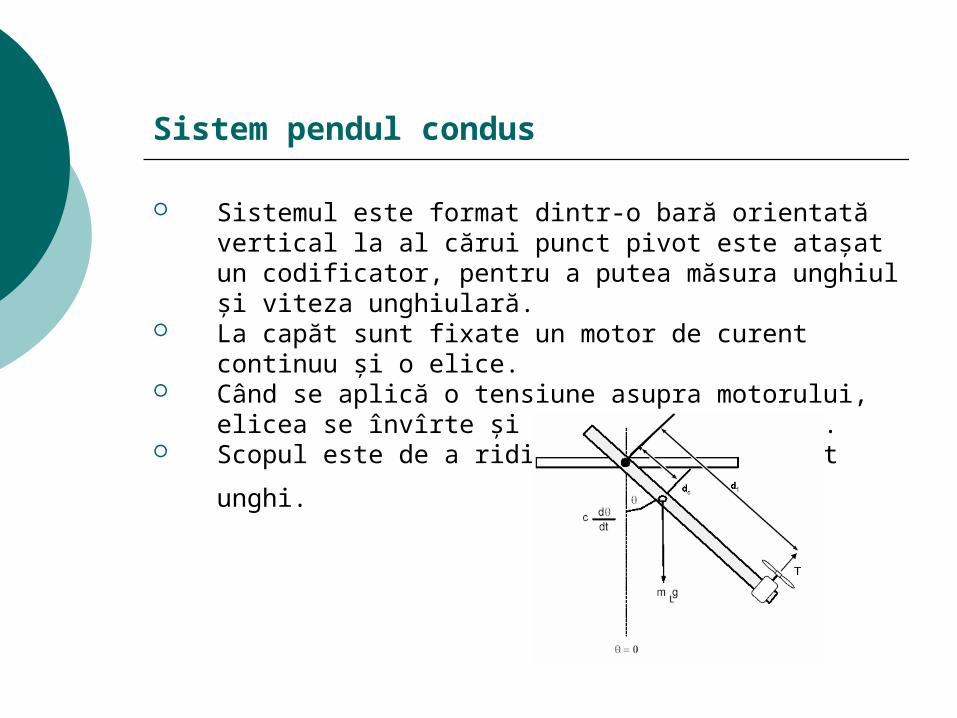
Sistem pendul condus
Sistemul este format dintr-o bară orientată vertical la al cărui punct pivot este ataşat un codificator, pentru a putea măsura unghiul şi viteza unghiulară.
La capăt sunt fixate un motor de curent continuu şi o elice.
Când se aplică o tensiune asupra motorului, elicea se învîrte şi împinge bara în sus.
Scopul este de a ridica bara cu un anumit unghi.
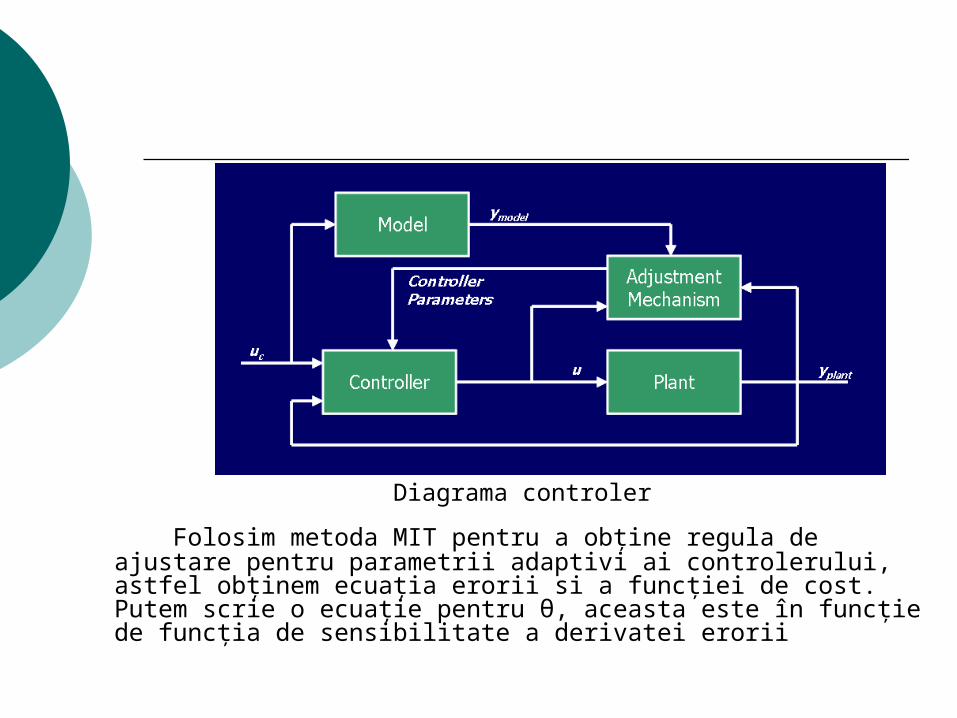
Folosim metoda MIT pentru a obţine regula de ajustare pentru parametrii adaptivi ai controlerului, astfel obţinem ecuaţia erorii si a funcţiei de cost. Putem scrie o ecuaţie pentru θ, aceasta este în funcţie de funcţia de sensibilitate a derivatei erorii
Diagrama controler
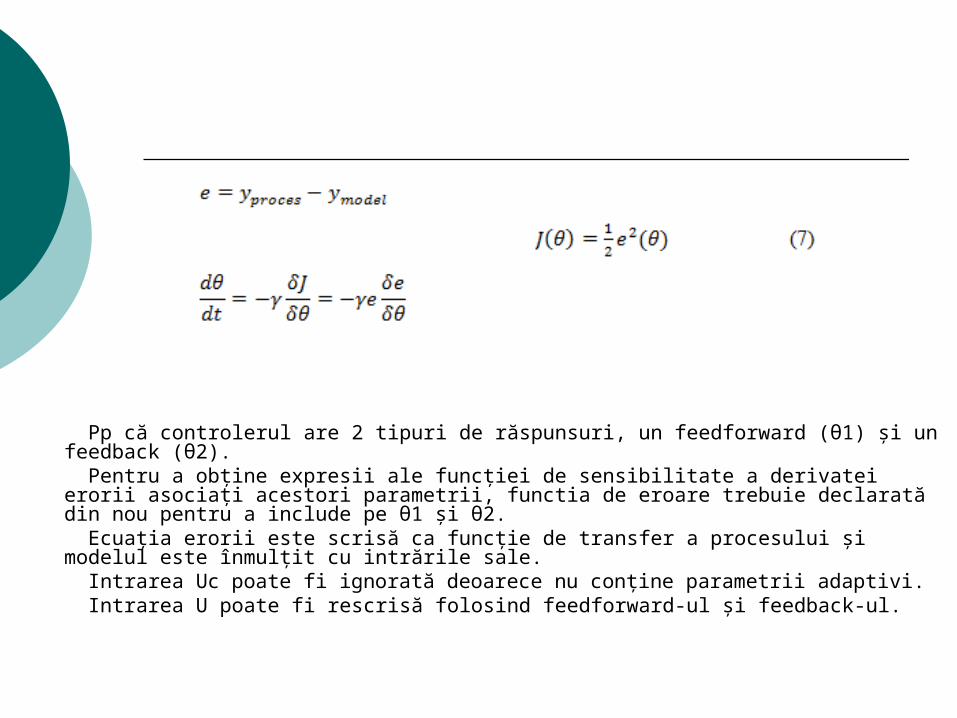
Pp că controlerul are 2 tipuri de răspunsuri, un feedforward (θ1) şi un feedback (θ2). Pentru a obţine expresii ale funcţiei de sensibilitate a derivatei erorii asociaţi acestori
parametrii, functia de eroare trebuie declarată din nou pentru a include pe θ1 şi θ2. Ecuaţia erorii este scrisă ca funcţie de transfer a procesului şi modelul este înmulţit cu
intrările sale. Intrarea Uc poate fi ignorată deoarece nu conţine parametrii adaptivi. Intrarea U poate fi rescrisă folosind feedforward-ul şi feedback-ul.
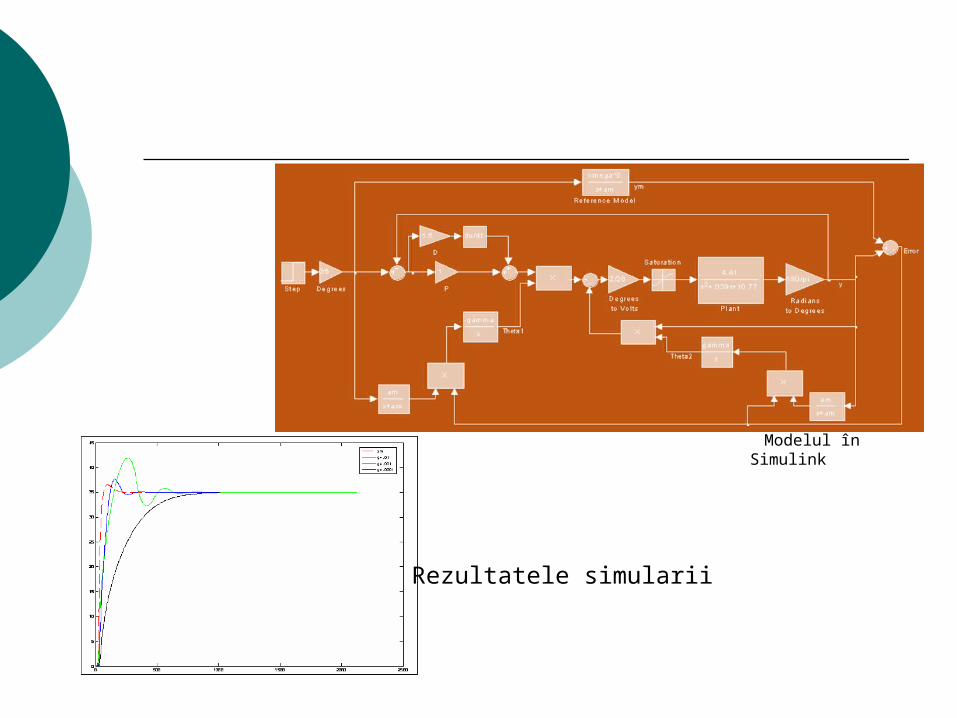
Modelul în Simulink
Rezultatele simularii
BIBLIOGRAFIE
S. E. Oltean – Control Inteligent şi Adaptiv, Curs – Universitatea Petru Maior, Târgu Mureş, 2009
http://www.pages.drexel.edu/~kws23/tutorials/MRAC/simulation/simulation.html
http://en.wikipedia.org/wiki/Adaptive_control