Sisteme-de-achizitie_2.pdf
92
1 SISTEME DE ACHIZIŢIE ŞI INTERFEŢE – INSTRUMENTAŢIE VIRTUALĂ Cap. I - Introducere în achiziţia de date 1.1 Introducere Achiziţiile de date implică gruparea de semnale de la diverse surse de măsurare şi digitizarea acestora pentru a putea fi păstrate, analizate şi prezentate pe un calculator. Sistemele de achiziţii de date (DAQ) sunt diverse pentru diferite tehnologii PC, asigurând astfel o mare flexibilitate la alegerea sistemului. Oamenii de ştiinţă şi inginerii pot alege dintre sistemele PCI, PXI, PCI Express, PXI Express, PCMCIA, USB, IEEE 1394, porturi seriale, porturi paralele pentru achiziţiile de date din aplicaţiile de testare, măsurare şi automatizare. Există cinci componente care trebuie avute în vedere când se construieşte un sistem DAQ de bază (fig. 1): -traductori şi senzori; -semnale; -condiţionarea semnalului; -hardware DAQ; -drivere şi aplicaţii software. Fig. 1 - Sistem de achiziţie a bazelor de date 1.2 Traductori Achiziţia de date începe cu fenomenul fizic care trebuie măsurat. Acest fenomen fizic poate fi temperatura unei camere, intensitatea unei surse de lumină, presiunea din interiorul unei camere, forţa aplicată unui obiect şi multe altele. Un sistem DAQ eficient poate măsura toate aceste fenomene diferite. Traductorul este un dispozitiv care converteşte un fenomen fizic într-un semnal electric măsurabil, cum este tensiunea electrică sau curentul. Posibilitatea unui sistem DAQ de a măsura diferite fenomene depinde de existenţa traductorilor care convertesc fenomenul fizic în semnale
Transcript of Sisteme-de-achizitie_2.pdf

1
SISTEME DE ACHIZIŢIE ŞI INTERFEŢE – INSTRUMENTAŢIE
VIRTUALĂ
Cap. I - Introducere în achiziţia de date
1.1 Introducere
Achiziţiile de date implică gruparea de semnale de la diverse surse de măsurare şi
digitizarea acestora pentru a putea fi păstrate, analizate şi prezentate pe un calculator. Sistemele
de achiziţii de date (DAQ) sunt diverse pentru diferite tehnologii PC, asigurând astfel o mare
flexibilitate la alegerea sistemului. Oamenii de ştiinţă şi inginerii pot alege dintre sistemele PCI,
PXI, PCI Express, PXI Express, PCMCIA, USB, IEEE 1394, porturi seriale, porturi paralele
pentru achiziţiile de date din aplicaţiile de testare, măsurare şi automatizare. Există cinci
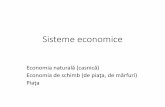
componente care trebuie avute în vedere când se construieşte un sistem DAQ de bază (fig. 1):
-traductori şi senzori;
-semnale;
-condiţionarea semnalului;
-hardware DAQ;
-drivere şi aplicaţii software.
Fig. 1 - Sistem de achiziţie a bazelor de date
1.2 Traductori
Achiziţia de date începe cu fenomenul fizic care trebuie măsurat. Acest fenomen fizic
poate fi temperatura unei camere, intensitatea unei surse de lumină, presiunea din interiorul unei
camere, forţa aplicată unui obiect şi multe altele. Un sistem DAQ eficient poate măsura toate
aceste fenomene diferite.
Traductorul este un dispozitiv care converteşte un fenomen fizic într-un semnal electric
măsurabil, cum este tensiunea electrică sau curentul. Posibilitatea unui sistem DAQ de a măsura
diferite fenomene depinde de existenţa traductorilor care convertesc fenomenul fizic în semnale

2
măsurabile de către hardware-ul DAQ. Traductoarele sunt sinonime cu senzorii în sistemele
DAQ. Există traductori specifici fiecărei aplicaţii, ca de exemplu: măsurarea temperaturii,
presiunii şi curgerii fluidului.
Tabelul de mai jos arată o scurtă listă a celor mai comune traductoare şi fenomenele pe
care acestea le pot măsura.
Fenomenul Traductorul
Temperatura Termocuplu
Rezistenţă termovariabilă
Lumina Tub vacuum
Fotosenzor
Sunetul Microfon
Forţa şi presiunea Traductor piezoelectric
Aparat de măsură sub presiune
Poziţia şi deplasarea Potenţiometru
Transformator diferenţial linear de tensiune
Traductor optic
Fluidul Traductori de debit rotativi
pH-ul Electrozi pH
Diferiţi traductori au cerinţe diferite pentru a putea converti fenomenul într-un semnal
măsurabil. Unele traductoare pot necesita excitaţie sub forma tensiunii sau curentului electric.
Altele pot necesita componente adiţionale şi chiar reţele de rezistenţe pentru a produce un
semnal.
1.3 Semnale
Traductoarele convertesc fenomenul fizic în semnal măsurabil. Semnalele pot fi măsurate
în diferite feluri. În acest scop, este important să se înţeleagă diferitele tipuri de semnale şi
atributele lor asociate. Semnalele pot fi clasificate în două grupuri:
- analogice
- digitale
1.3.1 Semnale analogice
Un semnal analogic poate lua orice valoare în timp. Câteva exemple de semnale
analogice includ: tensiunea electrică, temperatura, presiunea, sunetul şi forţa. Cele mai
importante trei caracteristici ale semnalului analogic sunt: nivelul, frecvenţa şi forma.
A. Nivelul (fig. 2)
Deoarece semnalele analogice pot lua orice valoare, nivelul oferă informaţii importante
cu privire la semnalul analogic măsurat. Intensitatea unei surse de lumină, temperatura unei
camere şi presiunea în interiorul unui volum sunt câteva exemple, care demonstrează importanţa
cunoaşterii nivelului unui semnal. Când se măsoară nivelul, în general, semnalul nu se schimbă
repede în timp. Acurateţea unei măsurători este însă foarte importantă. În măsurarea nivelului
unui semnal analogic ar trebui să fie utilizat un sistem DAQ, care să ofere maximum de
acurateţe.

3
B. Forma (fig. 2)
Unele semnale sunt denumite după forma lor specifică: sinusoidală, pătrată
(dreptunghiulară), zimţată/dinte de fierăstrău, triunghiulară, etc. Forma unui semnal analogic
poate fi la fel de importantă ca şi nivelul deoarece, măsurându-o, se poate analiza semnalul,
inclusiv valorile de vârf, de curent continuu şi pantă. Chiar dacă se analizează semnale la care
forma se schimbă rapid în timp, acurateţea este în continuare importantă. Analiza bătăilor inimii,
semnalele video, sunetele, vibraţiile şi răspunsurile circuitelor sunt câteva aplicaţii care implică
măsurarea formei semnalului.
C. Frecvenţa (fig. 2)
Toate semnalele analogice pot fi clasificate în funcţie de frecvenţă. Spre deosebire de
nivelul sau forma semnalului, informaţia legată de frecvenţă nu poate fi măsurată direct.
Semnalul trebuie să fie analizat folosind programe specializate, pentru a putea determina
informaţia referitoare la frecvenţă. Această analiză este făcută, în mod normal, folosind un
algoritm numit “transformata Fourier”.
Când informaţia legată de frecvenţă este cea mai importantă informaţie, este necesar de
luat în calcul atât o bună acurateţe, cât şi o viteză de achiziţie suficientă. Deşi viteza de achiziţie
pentru studiul frecvenţei unui semnal este mai mică decât viteza necesară pentru obţinerea
formei semnalului, semnalul trebuie să fie achiziţionat suficient de repede astfel încât informaţia
pertinentă să nu se piardă în timpul achiziţionării. Condiţia care indică valoarea acestei viteze
este cunoscută drept “teorema de eşantionare Nyquist”. Analiza vocală, telecomunicaţiile, studiul
cutremurelor sunt doar câteva exemple de aplicaţii unde trebuie cunoscută informaţia legată de
frecvenţa semnalului.
Nivel
Formă
Frecvență
Semnal
Fig. 2 - Caracteristicile de bază ale unui semnal analogic
1.3.2 Semnale digitale
Spre deosebire de cel analogic, semnalul digital nu poate lua orice valoare în timp. Astfel,
el are doar două niveluri posibile: înalt şi jos. Semnalele digitale se conformează, în general,
câtorva specificaţii care definesc caracteristicile acestora. Ele se supun, în mod obişnuit, logicii
tranzistor-tranzistor (TTL). Specificaţiile TTL arată că un semnal digital este jos atunci când
nivelul este între 0 şi 0.8V şi este înalt atunci când nivelul este între 2 şi 5V. Informaţiile utile
care pot fi măsurate la un semnal digital sunt: rata şi starea.

4
A. Rata (fig. 3)
Rata unui semnal digital defineşte cum se schimbă starea semnalului în timp. Un exemplu
de măsurare a ratei unui semnal digital este determinarea vitezei cu care se roteşte un motor, prin
utilizarea unui traductor digital. Spre deosebire de frecvenţă, rata unui semnal digital măsoară cât
de des apare o porţiune dintr-un semnal. Nu este neapărat necesar un algoritm software sofisticat
pentru a putea determina rata semnalului.
B. Starea (fig. 3)
Semnalul digital nu poate lua orice valoare în timp. Starea sa este, de fapt, nivelul
semnalului (on sau off, înalt sau jos). Monitorizarea stării unui comutator (deschis sau închis)
este o aplicaţie comună, care arată importanţa cunoaşterii stării semnalului.
sus
josStarea
Rata
Semnal digital
Fig. 3 - Caracteristicile de bază ale unui semnal digital
1.4 Condiţionarea semnalului
Uneori, traductoarele generează semnale dificil sau prea periculoase pentru a fi măsurate
direct cu un dispozitiv DAQ. De exemplu, când se analizează tensiuni înalte, medii zgomotoase,
semnale extrem de mici sau mari ori se fac măsurări simultane, condiţionarea semnalului este
esenţială pentru un sistem DAQ eficient. Condiţionarea semnalului maximizează acurateţea
sistemului, permite senzorilor să lucreze corespunzător şi garantează siguranţa în exploatare.
Este important să se selecteze configuraţia hardware corespunzătoare pentru o
condiţionare a semnalului eficientă (fig. 4). Această configuraţie poate fi oferită în variantele
modulară şi integrată. Accesoriile de condiţionare a semnalului pot fi folosite într-o varietate de
aplicaţii care includ:
- amplificare;
- atenuare;
- izolare;
- completare de punte de măsurare;
- stimulare;
- excitaţia senzorului;
- multiplexare.
Alte criterii importante, ce trebuie luate în considerare sunt: modul de prezentare
(modular sau integrat), performanţa, numărul de canale de intrare-ieşire, diverse proprietăţi
avansate ale sistemului şi nu în ultimul rând, costul.

5
Fig. 4 - Opţiuni hardware pentru condiţionarea semnalului
1.5 Hardware DAQ
Hardware-ul DAQ acţionează ca interfaţă între computer şi mediu. El funcţionează ca un
dispozitiv care digitizează semnalele analogice de intrare, pentru a putea fi interpretate de către
calculator. Alte funcţionalităţi ale sistemelor de achiziţie de date includ:
- intrare/ieşire analogică;
- intrare/ieşire digitală;
- contor/”timer”;
- multifuncţional – combinaţia de analog, digital şi operaţii de numărare într-un singur
dispozitiv.
Unele firme oferă câteva tipuri de platforme hardware pentru achiziţiile de date. Cea mai
uşor disponibilă platformă este calculatorul de birou. Există şi modulele DAQ pentru
PXI/CompactPCI, soluţie robustă industrială mult mai flexibilă pentru măsurători şi aplicaţii
automatizate. Pentru măsuratori distribuite, există o platformă (Compact FieldPoint) care oferă
module de I/O, operare integrată şi comunicaţie Ethernet. Pentru măsurători portabile, sunt
dispozitive DAQ pentru USB şi PCMCIA, care lucrează cu laptop-uri sau PocketPC PDA-uri.
Mai mult, recent s-au lansat dispozitive DAQ pentru PCI Express, generaţia următoare a PC
porturilor de I/O, precum şi pentru PXI Express. Câteva exemple de opţiuni hardware pentru
achiziţii de date sunt prezentate în fig. 5.

6
Fig. 5 - Opţiuni hardware pentru achiziţii de date
1.6 Drivere şi software de aplicaţie
1.6.1 Software driver
Software-ul transformă PC-ul şi hardware-ul DAQ într-un instrument complet de
achiziţie de date, analiză şi prezentare. Fără un software de control sau drivere, DAQ nu va putea
lucra corespunzător. Software-ul driver este tipul de program care face mai facilă comunicarea
cu hardware-ul. El este, de fapt, partea de mijloc între hardware şi software-ul de aplicaţie.
Acesta scuteşte, de asemenea, un programator să realizeze programarea dificilă la nivel de
registru sau comenzi complicate pentru a putea accede la funcţiile hardware-ului.
Odată cu introducerea DAQmx, s-a revoluţionat dezvoltarea aplicaţiilor DAQ prin
mărirea vitezei de acces. Cu un singur click, se pot genera coduri în configuraţie de nivel redus,
făcând mai uşoară şi mai rapidă dezvoltarea de operaţii complexe. Deoarece este un proces
complet condus de către meniu, se vor face mai puţine erori de programare şi se va reduce drastic
timpul pentru setarea sistemului DAQ.
1.6.2 Software de aplicaţie
Software-ul de aplicaţie poate fi un mediu de dezvoltare, în care se personalizează o
aplicaţie ce îndeplineşte criterii specifice sau poate fi o configuraţie bazată pe un program cu
funcţionalitate presetată. Software-ul de aplicaţie adaugă unui sofware driver capabilităţi de
analiză şi prezentare. Pentru a alege sofware-ul potrivit, trebuie evaluată complexitatea aplicaţiei,
disponibilitatea configuraţiei software care se potriveşte aplicaţiei şi timpul necesar pentru a o
dezvolta. Dacă aplicaţia este complexă sau nu se doreşte programare la nivel redus, atunci
trebuie folosit un mediu de dezvoltare.
Există o companie (National Instruments) care oferă trei medii diferite de dezvoltare
pentru instrumentaţie completă, achiziţie şi aplicaţie de control:
- LabVIEW cu metodologie de programare grafică;

7
- LabWindows CVI pentru programarea tradiţională C;
- Measurement Studiu pentru visual Basic, C++ şi .NET.
Odată cu introducerea SignalExpress, s-a introdus o nouă configuraţie software, unde
programarea nu este o cerinţă, putându-se face astfel măsurători interactive.
Cap. II - Noţiuni explicative despre specificaţiile instrumentelor
De mulţi ani, plăcile multifuncţionale de achiziţie de date au oferit inginerilor şi
oamenilor de ştiinţă interfaţa necesară între traductori şi computere. Aceste plăci sunt construite
pentru o gamă largă de aplicaţii, de la măsurarea forţei cu dinamometrul până la testarea
echipamentelor de telecomunicaţii. Ca urmare a dezvoltărilor în tehnologia computerelor şi a
componentelor, acum este posibil să se construiască sisteme de măsurare bazate pe computer,
care concurează şi chiar depăşesc performanţele sistemelor tradiţionale bazate pe echipamente
specializate/unitare. Plăcile de achiziţii de date şi instrumentele unitare s-au remarcat fie prin
diferite terminologii privitoare la specificaţii, fie prin terminologii similare cu înţelesuri diferite.
În continuare, se va încerca definirea unor noţiuni aplicabile tutror tipurilor de sisteme DAQ.
Rezoluţia – cea mai mică variaţie a semnalului de intrare, pe care instrumentul îl poate
detecta cu certitudine. Acest termen este determinat de zgomotul instrumentului, fie zgomotul
circuitelor electrice, fie cel de cuantizare. De exemplu, dacă avem un voltmetru fără zgomot al
circuitelor electrice, care are 5 ½ digiţi afişaţi şi este reglat la tensiunea de intrare de 20V,
rezoluţia voltmetrului este de 100 µV. Aceasta se poate determina prin calculul variaţiei de
semnal asociată celei mai puţin importante cifre (digit).
Dacă acelaşi voltmetru ca mai sus are 10 măsurători ale zgomotului vârf-la-vârf, rezoluţia
efectivă ar putea scădea din cauza prezenţei zgomotului. Datorită distribuţiei gaussiene a
zgomotului, în acest caz rezoluţia efectivă ar fi de 0,52 x 1mV.
În general, când există un sistem de măsurare care are X digiţi ai zgomotului Gaussian,
rezoluţia efectivă a sistemului este dată de relaţia:
rezoluţie = 0.52 × X counts sau volţi
Un sistem de măsurare sau un dispozitiv fără zgomot are rezoluţia efectivă de 1 count.
Numărul efectiv de digiţi (ENOD) – parametru de performanţă pentru un instrument sau
digitizor, definit în termeni de domeniu total şi rezoluţie.
(1)
ENOD = log10((20-(-20))/0.52 mV) = 4.886 pentru voltmetru cu zgomot din exemplul
anterior şi
ENOD = log10((20-(-20))/100 µV) = 5.60206 pentru voltmetru fără zgomot.
Notă: Vârf-la-vârf = rms x 6.6
Digiţii afişaţi şi depăşirea domeniului (Overranging) - numărul de digiţi afişaţi de către
ecranul DMM. Este adesea specificat ca număr total de digiţi (digiţi care pot afişa valori între 0
şi 9) şi un digit suplimentar de depăşire denumit digit 1/2. Digitul 1/2 arată numai valorile 0 sau
1. De exemplu, un afişaj de 6 ½ digiţi are 7 digiţi afişaţi, iar cel mai semnificativ digit poate afişa
valoarea 0 sau 1, în timp ce ceilalţi 6 digiţi pot lua valori de la 0 la 9. Oricum, gama de afişare
este de 1.999.999. Aceasta nu trebuie confundată cu rezoluţia; un DMM poate avea mai mulţi
digiţi afişaţi decât rezoluţia efectivă.

8
Numărul de intervale (counts - «contori ») – numărul de diviziuni în care este împărţită
o scală dată de măsurare. De exemplu, un voltmetru clasic de 5 ½ digiţi are 199.999 (de la -
199.000 la +199.000) sau 399.999 intervale. Lăţimea unui interval este dată de următoarea
expresie:
(2)
Numărul biţilor celor mai puţini semnificativi (LSB) – numărul de diviziuni în care este
împărţită o scală de măsurare. De exemplu, un digitizor pe 12 biţi are 4096 LSB (într-un sistem
bipolar pe 12 biţi, scala de coduri returnate este de -2048 la +2047). Lăţimea unui LSB este dată
de formula următoare :
Numărul de LSB-uri pentru un digitizor de n biţi este dat de:
Notă : LSB şi contorii sunt aceiaşi. Un digitizor fără DMM consideră, în mod normal, contorii
săi ca fiind numărul de LSB.
Sensibilitatea – valoarea celui mai mic semnal pe care instrumentul îl poate măsura. În
mod normal, aceasta este definită pentru cea mai mică scală a instrumentului. De exemplu, un
aparat de măsurare a curentului alternativ cu cea mai mică scală de 10V poate măsura semnale cu
1mV rezoluţie dar cea mai mică tensiune pe care o poate măsura este de 15mV. În acest caz,
dispozitivul are o rezoluţie de 1mV şi o sensibilitate de 15mV.
Acurateţea - măsură a capacităţii instrumentului de a indica în mod fidel valoarea unui
semnal măsurat. Acest termen nu este legat de rezoluţie. În orice caz, acurateţea nu poate fi mai
bună decât rezoluţia instrumentului. Acurateţea este de cele mai multe ori precizată ca:
De exemplu, un voltmetru 5 ½ poate avea o acurateţe a citirii de 0.0125% dintr-o citire de
24 μV la o scală de măsurare de 2.5V, care conduce la o eroare de 149 μV când se măsoară un
semnal de 1V. Pe de altă parte, rezoluţia aceluiaşi voltmetru este de 12 μV, de 12 ori mai bună
decât acurateţea.
Precizia – măsură a stabilităţii instrumentului şi capacităţii sale de a genera aceeaşi
valoare de măsurare ori de câte ori se măsoară acelaşi semnal de intrare. Este dată de relaţia:
unde Xn este valoarea la a n-a măsurătoare

9
Av(xn) este media valorilor setului de n măsurători
De exemplu, dacă se monitorizează o tensiune constantă de 1V şi se observă că valoarea
măsurată se schimbă cu 20μV între măsurători, atunci precizia măsurătorii este de:
care este de 6.25 de ori mai bună decât acurateţea voltmetrului. Această specificaţie este în
principal utilă când se foloseşte voltmetrul pentru a calibra un dispozitiv sau pentru a face
măsurători relative.
Modul normal (fig. 6)– o indicaţie a variaţiei diferenţiale la intrările instrumentului de
măsură.
Modul comun (fig. 6)– o indicaţie a unei variaţii egale la ambele intrări ale instrumentului
de măsură.
Fig. 6 - Modul normal şi modul comun la tensiune
Rata respingerii modului normal (NMRR) – descrie capacitatea instrumentului de a
rejecta (respinge) un semnal normal (diferenţial) şi este dată de formula :
unde Vin este semnalul aplicat diferenţial la intrările instrumentului
Vmăsurata este valoarea indicată de către DMM.
Această specificaţie este utilă pentru sistemele de măsurare care au filtre, pentru a elimina
semnalele peste o frecvenţă dată sau în afara unei game de frecvenţe. Pentru sisteme care nu au
filtre, NMRR este 0dB. Această specficaţie, care este adesea folosită pentru a indica capacitatea
instrumentului de a respinge 50 sau 60Hz, este validă doar la frecvenţa specificată şi utilă doar
când se fac măsurători de curent continuu DC.
De exemplu, dacă se măsoară 1mVDC cu un DMM care specifică un NMRR de 130dB la
60Hz şi există un mod normal de interferenţă (zgomot) de 100mVrms, atunci eroarea de
măsurare rezultată este:

10
care este de 0.003 procente din semnalul măsurat, în locul a 10.000 procente eroare, pe care
interferenţa de 100mV o implică.
Rata respingerii modului comun (CMRR) – capacitatea unui instrument de a respinge
semnalul care este comun ambelor intrări. De exemplu, dacă se măsoară cu un termocuplu într-
un mediu zgomotos, zgomotul de la mediu apare la ambele intrări. De aceea, acest zgomot este
un semnal de mod comun respins de către CMRR al instrumentului. CMRR este definit de
următoarea ecuaţie :
în care « differential gain » este amplificarea în mod diferenţial
« common-mode gain » este amplificarea în mod comun
Această specificaţie este foarte importantă deoarece indică cât de mult un semnal de mod
comun va afecta măsurătoarea. CMRR este, de asemenea, dependent de frecvenţă. O ecuaţie
echivalentă pentru a reprezenta CMRR este:
unde Vinmăsurat este valoarea indicată pentru o tensiune de mod comun VC
Rata efectivă a respingerii modului comun (ECMRR) – valabilă doar pentru
măsurătorile în curent continuu, este suma CMRR şi NMRR la o frecvenţă dată. Reprezintă
rejectarea efectivă a unui semnal de zgomot, care este aplicat ambelor intrări pentru că este
respins mai întâi de către CMRR a unui instrument – dacă semnalul este de mod comun, iar apoi
este eliminat de NMRR la frecvenţa respectivă (cele două lucrează în cascadă). Această
specificaţie este folositoare la frecvenţele liniei de alimentare (50Hz).
Nelinearitatea – mărimea distorsiunii semnalului. Această distorsiune variază odată cu
nivelul semnalului de intrare şi/sau cu frecvenţa. Acurateţea specificaţiilor este bazată pe
presupunerea că instrumentul are o funcţie de transfer, descrisă după cum urmează:
În această specificaţie, termenii procentuali şi de offset se aplică gradului de acurateţe
pentru care cunoaştem m (panta funcţiei de transfer) şi b (interceptarea - valoarea tensiunii
afişate indicată la intrare nulă). În orice caz, multe sisteme de măsurare au funcţii de transfer care
sunt mult mai bine modelate ca funcţii polinomiale de ordin 2 sau 3. Pentru a păstra calibrarea
simplă, funcţia de transfer este presupusă a fi liniară şi eroarea de neliniaritate este specificată
pentru a putea indica efectul componentelor de ordinul al 2-lea sau al 3-lea din funcţia de
transfer. Această eroare este definită ca procent din domeniul de măsurare şi nu din citire.
Motivul este că vârful erorii de neliniaritate ar putea apărea în orice punct de-a lungul întregii
scale de intrare. De exemplu, fiind dată o nelinearitate de 0.0015% şi o scală de 2V, voltmetrul
are o eroare adiţională de 0.0015% x 2 = 30μV. Această eroare este uneori inclusă în eroarea de
offset indicată în tabelul de acurateţe.
Factorul de vârf – raportul dintre vârful tensiunii şi tensiunea rms a unui semnal, este dat
de formula:

11
Pentru o undă sinusoidală, factorul de vârf este 1.414, pentru un semnal dreptunghiular
este 1. Această specificaţie este importantă deoarece indică vârful maxim al valorii unui front de
undă pe care DMM îl poate suporta fără supraîncărcare. Factorul de vârf, de asemenea, afectează
acurateţea unei măsurări în curent alternativ. De exemplu, având un DMM cu o acurateţe de AC
de 0.03% (aceasta este întotdeauna specificată pentru unde sinusoidale) şi cu o eroare adiţională
de 0.2% pentru factori de vârf între 1.414 şi 5, atunci acurateţea totală pentru măsurarea unei
unde triunghiulare (factorul de vârf este 1.73) este 0.03% + 0.2% = 0.23%.
Valoarea medie pătratică (rms) – o valoare asociată unui semnal AC care reprezintă
valoarea semnalului DC necesar pentru a produce o cantitate echivalentă de căldură la trecerea
prin aceeaşi rezistenţă. Ecuaţia sa matematică este dată:
sau simplificată:
Valoarea medie pătratică reală – metodă specifică de măsurare a valorii rms a unui
semnal. Această metodă are ca rezultat cea mai precisă valoare rms indiferent de forma undei.
Există şi alte metode de măsurare a valorii rms, cum este redresarea semnalului sau metoda
deviaţiei absolute a mediei. Aceste metode sunt corecte însă numai în cazul semnalelor de undă
sinusoidale.
Măsurarea rezistenţei cu 2 fire – o metodă de măsurare a rezistenţei care foloseşte numai
două fire de test. Pentru a măsura rezistenţa, voltmetrul trece un curent prin rezistorul de interes
şi apoi măsoară tensiunea dezvoltată de-a lungul acestui rezistor. La această metodă, şi curentul
introdus, şi tensiunea sesizată folosesc aceeaşi pereche de fire de test, aşa cum se vede în figura 7
Măsurarea rezistenţei cu 4 fire – o metodă de măsurare a rezistenţei care foloseşte patru
fire de test. O pereche este folosită pentru curentul introdus, cealaltă pereche pentru măsurarea
tensiunii dezvoltate de-a lungul rezistorului. Această metodă, mai corectă, este recomandată la
măsurarea rezistenţei cu valorea mai mică de 100 . Este atinsă o acurateţe mai bună deoarece
rezistenţele firelor sunt înlăturate din calea de măsurare, aşa cum se vede în figura 7.

12
Fig. 7 - Metode de măsurare a rezistenţei cu 2 şi 4 fire
2.1 Rezoluţie, precizie, acurateţe
De cele mai multe ori, aceşti termeni sunt folosiţi alternativ, însă ei indică entităţi foarte
diferite. Deşi bunul simţ arată că un multimetru de 6 ½ digiţi trebuie să fie exact la un nivel de 6
½ digiţi, nu aceasta este situaţia şi în realitate. Numărul de digiţi se referă, pur şi simplu, la
numărul de afişaje numerice ale instrumentului şi nu la minimul schimbării semnalului de intrare
sesizabil. Totuşi, când se foloseşte sau se evaluează un instrument, trebuie reamintit că numărul
de digiţi se poate referi la afişare, şi nu direct la rezoluţia instrumentului.
Trebuie verificat dacă sensibilitatea instrumentului şi rezoluţia efectivă sunt de ajuns
pentru a garanta că instrumentul va oferi rezoluţia dorită pentru măsurare. De exemplu, un
multimeter de 6 ½ digiţi poate prezenta o scală cu 1.999.999 unităţi. Dar dacă instrumentul are o
valoare de zgomot de 20 intervale de măsurare, măsurat vârf-la-vârf, atunci schimbarea minimă
sesizată trebuie să fie de cel puţin 0.52 x 20 intervale. În baza ecuaţiei de mai jos, numărul
efectiv de digiţi este:
Deseori, această eroare este inclusă în specificaţia de domeniu procentual (percent range)
atunci când sursa erorii – neliniaritate, zgomot sau offset – nu este identificată.
Acest aspect al specificaţiilor tehnice se referă la primul multimetru digital creat, care a
avut limitat numărul de digiţi afişaţi pentru a păstra costul instrumentului cât mai mic. Cu

13
ajutorul unor instrumente digitale din ce în ce mai sofisticate şi chiar al unor instrumente
virtuale, costul afişajului nu mai reprezintă o problemă. Trebuie avută grijă când se precizează
numărul de digiţi ale dispozitivului de măsurat. Rezoluţia, acurateţea, nelinearitatea şi zgomotul
dispozitivului de măsurat trebuie avute în vedere când se determină numărul de digiţi de pe
afişaj. De exemplu, se consideră un instrument care foloseşte convertor analogic - digital (ADC)
pe 24 biţi şi poate afişa 7 digiţi de date. Cu toate acestea, dacă ultimii şase biţi semnificativi sunt
zgomotoşi şi nu pot purta nici o informaţie utilă, rezoluţia acestui ADC este redusă la 18 biţi (5
digiţi) şi instrumentul nu ar trebui să afişeze mai mult de 5 digiţi.
Uneori este dificil de realizat o distincţie clară între precizia instrumentului şi acurateţea
sa. Precizia, legată de repetabilitatea măsurătorii, este determinată de zgomot şi de deviaţia pe
termen scurt a instrumentului. Deviaţia pe termen lung a instrumentului afectează precizia doar
când este considerată pe o perioadă foarte lungă de timp. De multe ori, precizia unui instrument
nu este oferită direct, dar trebuie dedusă din alte specificaţii, precum funcţia de transfer,
zgomotul şi deviaţia cu temperatura. Precizia este relevantă atunci când trebuie să fie realizate
măsurători relative (relativ la o citire anterioară a aceleiaşi valori); un exemplu tipic este
calibrarea dispozitivelor.
Acurateţea unui instrument este absolută şi trebuie să includă toate erorile rezultate din
procesul de calibrare. Este interesant de notat că uneori specificaţiile de acurateţe sunt în funcţie
de standardul de calibrare folosit. În acest caz, este important de inclus în bugetul erorii toate
erorile adiţionale datorate acestui standard de calibrare.
2.2 Determinarea acurateţei
Măsurare de tensiune continuă (DC Measurement)
Tipul erorii Erori dependente de citire Erori dependente de
zgomot si domeniu
Acurateţe specificată
% din citire x citirea/100 Deviaţie (offset)
Neliniaritate % neliniaritate x
domeniul/100
Zgomotul sistemului Zgomot rms x 6.6 (pentru a
găsi valoarea vârf-la-vârf )
Timp de stabilizare
% de stabilizare x variaţia tip
treaptă/100 (acest parametru trebuie
indicat pentru sistemele cu scanare
dacă nu este inclus în specificaţiile
de acurateţe)
Zgomot de mod normal NMR Zgomot de mod normal
x 10^(-NMRR/20)
Tensiune de mod comun CMV Tensiune de mod comun
x 10^(-CMRR/20)
Deviaţia cu temperatura (trebuie
adăugată dacă domeniul de
temperaturi de utilizare este în afara
domeniului pentru care este
(% din citire/°C) x X °C x citire/100
X este diferenţa de temperatură
dintre domeniul de temperatură
specificat şi temperatura actuală de
(offset /°C) x X °C
X este diferenţa de
temperatură dintre domeniul
de temperatură specificat şi

14
specificată acurateţea indicată) operare. temperatura reală de operare.
Să considerăm un convertor cu 5 ½ digiţi, temperatură şi tensiune. Vom calcula
acurateţea totală la valoarea de 1V. Să presupunem, de asemenea, că instrumentul este la o
temperatură între 15 şi 35 C şi a trecut mai puţin de un an de la ultima calibrare, dar nu mai mult
de 90 de zile.
Acurateţea totală este determinată mai jos :
Tipul erorii Procent al erorii de citire Erori dependente de zgomot si
domeniu
Acurateţe specificată 1 V x 0.0131% = 131 mV 3 µV
Neliniaritate 0, inclus în acurateţe
Zgomotul sistemului 0, inclus în offset
Timp de stabilizare
Nu este necesar deoarece tabelul de
specificaţii a inclus toate erorile de
scanare
Zgomot de mod
normal, se consideră 1
mVrms zgomotul
înconjurător
1 mV x 1.4 x l0^(-100/20)
= 0.01 µV
Tensiune de mod
comun, se consideră un
nivel maxim CMV de
2.5 V
2.5 x 10^(-100/20)
= 25 µV
Deviaţia cu
temperatura
N/A (deoarece tabela de specificaţii
acopera domeniul 15 - 35 °C)
N/A (deoarece tabela de specificaţii
acopera domeniul 15 - 35 °C)
Subtotal 131 µV 28.01 µV
Eroare maximă totală 159.01 µV sau 0.016% din citire
Măsurare de tensiune alternativă (AC Measurement)
Tipul erorii Erori dependente de citire Erori dependente de
domeniu
Acurateţe specificată pentru un
domeniu de frecvenţă a
semnalului dat
% din citire x citirea/100 Deviaţie (offset)
Neliniaritate % neliniaritate x
domeniul/100
Zgomotul sistemului Zgomot rms x 3,46 (pentru a
găsi valoarea vârf-la-vârf x
zgomotul gaussian presupus)
Timp de stabilizare
% stabilizat x variaţie tip treaptă/100
(acest parametru trebuie indicat pentru
sistemele cu scanare, dacă nu este
inclus în specificaţiile de acurateţe)
Tensiune de mod comun CMV Tensiune de mod comun x

15
10^(-CMRR/20)
Deviaţia cu temperatura
(trebuie adăugată dacă
domeniul de temperaturi la
utilizare este în afara
domeniului pentru care este
specificată acurateţea indicată)
(% din citire/°C) x X °C x citirea/100
X este diferenţa de temperatură dintre
domeniul de temperatură specificat şi
temperatura actuală de operare.
offset /°C x X °C
X este diferenţa de
temperatură dintre domeniul
de temperatură specificat şi
temperatura actuală de
operare.
Eroarea factorului de vârf
X x citirea/100
Se adaugă X% eroare adiţională în
funcţie de tipul undei.
Să considerăm un multimetru cu 5 ½ digiţi şi să calculăm acurateţea totală a citirii unui
semnal cu valoarea de 1 Vrms. Să considerăm, de asemenea, că instrumentul este într-un mediu
în care temperatura este între 15 şi 350C şi a trecut un an de la calibrare. Pentru că este o
măsurare AC, trebuie specificată frecvenţa semnalului măsurat (1 kHz) şi factorul de vârf (2).
Acurateţea totală este determinată mai jos :
Tipul erorii Erori dependente de citire Erori dependente de
domeniu
Acurateţe specificată pentru un
domeniu de frecvenţă a
semnalului dat
0.42% x 1 V = 4.2 mV 1.2 mV
Neliniaritate Inclus în tabelul de specificaţii Inclus în tabelul de
specificaţii
Zgomotul sistemului Inclus în tabelul de
specificaţii
Timp de stabilizare
Acest tip de DMM nu este conceput
pentru scanare şi se consideră că
semnalul nu variază.
Nivel de mod comun CMV - se
consideră CMV acceptabil de
250 V
250 x 10^
(-100/20) = 2.5 mV
Deviaţia cu temperatura
Neaplicabilă deoarece domeniul de
temperatură este inclus în tabelul de
specificaţii
Eroarea factorului de vârf 0% x 1 V/100 = 0 mV (semnalul nu
variază)
Subtotal 4.2 mV 3.7 mV
Eroare maximă totală 7.9 mV sau 0.79% din citire
2.3 Concluzii
Când se ia în considerare un DMM sau un instrument virtual, este important de înţeles
foarte clar toţi parametri implicaţi în definirea caracteristicilor dispozitivului de măsurare.
Numărul de digiţi afişaţi în foaia de date este o informaţie importantă dar ar trebui să nu fie
considerată ultima sau singurul parametru de luat în considerare. Cunoscând acurateţea şi

16
rezoluţia necesare în aplicaţie, se poate calcula bugetul total de eroare al dispozitivului de
măsurat pe care îl considerăm şi apoi se va verifica dacă satisface nevoile aplicaţiei. Fără a
cunoaşte performanţa reală a instrumentului, aplicaţia ar putea să ne conducă la citiri incorecte şi
costul acestor erori ar putea fi foarte mare.
Cap. III - Elemente fundamentale referitoare la achiziţiile de date bazate
pe PC
3.1 Calculatorul (PC)
Calculatorul care se foloseşte pentru un sistem DAQ poate afecta foarte serios viteza
maximă la care se pot achiziţiona date în mod continuu. Dar calculatoarele se îmbunătăţesc
permanent, şi astfel sistemul DAQ poate profita de capacităţile crescute ale PC-ului, incluzând
aici procesarea în timp real, abilitatea de a folosi grafică video complexă şi viteze de transfer
către hardisk din ce în ce mai mari. În prezent, bus-ul PCI şi port-ul USB sunt echipamente
standard la majoritatea calculatoarelor de birou şi pot ajunge teoretic până la 132Mb/s în
transferul de date. Bus-uri externe şi portabile, cum sunt PCMCIA, USB şi FireWire oferă o
alternativă flexibilă sistemelor DAQ bazate pe PC, atingând o rată de transfer de până la 40Mb/s.
Pentru aplicaţii DAQ isolate, la distanţă sau distribuite, se pot plasa nodurile de măsurare chiar
lângă sursele de semnal şi se poate folosi o tehnologie de reţea standard, cum este Ethernet, serial
sau wireless.
Când se alege un dispozitiv DAQ şi o arhitectură bus trebuie avute în vedere metodele de
transfer de date suportate de către aparat şi bus, precum şi ratele de transfer. Capacitatea de
transfer de date poate afecta, la rândul ei, performanţa sistemului DAQ. Şi cum viteza unui
computer creşte pe zi ce trece, creşte şi viteza unui sistem DAQ.
Calculatoarele actuale sunt capabile de I/O programate şi transferuri de date întrerupte.
Transferurile DMA (direct memory access) măresc rezultatele sistemului prin folosirea unui
hardware dedicat, pentru a putea transfera datele direct în memoria sistemului. Folosind această
metodă, procesorul nu mai este încărcat cu mutarea datelor şi este astfel liber pentru a procesa
sarcini mult mai complexe. Pentru a se folosi beneficiile unui DMA sau ale transferurilor
întrerupte, sistemul DAQ trebuie să fie capabil de aceste tipuri de transfer. De exemplu, atât PCI
cât şi FireWire oferă şi DMA dar şi transferuri întrerupte, însă PCMCIA şi USB folosesc doar
transferurile întrerupte. În funcţie de câtă procesare este nevoie la transferul de date, mecanismul
de transfer al datelor poate afecta viteza cu care sunt transferate datele de la sistemul DAQ în
memoria calculatorului.
Factorul de limitare pentru stocarea în timp real a unor cantităţi mari de date este, de cele
mai multe ori, harddisk-ul. Timpul de acces şi fragmentarea acestuia pot reduce semnificativ rata
maximă la care pot fi achiziţionate datele şi stocate pe disc. Pentru sisteme care trebuie să
achiziţioneze semnale de frecvenţă înaltă, trebuie selectat un hard drive de viteză ridicată şi
asigurat un spaţiu liber nefragmentat suficient pentru a păstra datele.
În trecut, aplicaţiile care necesitau procesarea în timp real a semnalelor de frecvenţă
înaltă aveau nevoie de un processor de mare viteză de 32 bit şi un co-procesor sau o placă de
procesare a semnalului digital (DSP). Cu procesoarele actuale însă se pot realiza aceleaşi analize
în timp real, dar fără a fi nevoie de o placă specială DSP, deoarece ele sunt capabile de rate de
transfer de 2,5 GHz.

17
Importantă este şi alegerea unui sistem de operare optim, care să producă un beneficiu
dar să şi îndeplinească ţelurile propuse. Factorii care pot influenţa alegerea acestuia sunt:
experienţa şi nevoile dezvoltatorilor şi utilizatorilor finali, alte utilizări ale calculatorului (atât în
present, cât şi în viitor), constrângeri legate de cost, software-ul de pe acel sistem de operare.
Platformele clasice includ sistemul de operare Mac, cunoscut pentru interfaţa sa grafică foarte
simplă şi Windows, care includ facilităţi ca “plug and play” şi “power management”. Sistemele
de operare în timp real furnizează astfel soliditate şi robusteţe, necesare diverselor tipuri de
aplicaţii.
3.2 Hardware-ul sistemului de achiziţie de date DAQ
În funcţie de aplicaţiile existente, există mai multe clase de dispozitive DAQ bazate pe
PC care pot fi folosite:
- intrare/ieşire analogică;
- intrare/ieşire digitală;
- contor/timer;
- multifuncţional – o combinaţie de analogic, digital şi operaţii counter
3.2.1. Intrările analogice
Specificaţiile de bază ale intrărilor analogice furnizează informaţii despre numărul de
canale, rata de eşantionare, rezoluţia, domeniul intrării.
Numărul de canale – este specificat atât pentru intrări singulare, cât şi intrări diferenţiale,
în cazul în care dispozitivul are ambele tipuri de intrări. Intrările singulare au toate referinţă la
acelaşi potenţial de împământare comun. Intrările singulare sunt folosite atunci când semnalele
de intrare au un nivel înalt (mai mare de 1V), firele de la sursa de semnal la intrarea hardware
analogică sunt scurte (mai mici de 15 ft.) şi toate semnalele de intrare sunt conectate la un
potenţial de masă comun. Dacă nu se îndeplinesc aceste condiţii, ar trebui folosite intrările
diferenţiale. La acestea însă, fiecare intrare are referinţa ei; erorile de zgomot sunt reduse
deoarece zgomotul de mod comun conectat pe fire este anulat.
Rata de eşantionare – acest parametru determină de câte ori pe secundă au loc
conversiile. La o rată de eşantionare mai rapidă se achiziţionează mai multe date într-un timp dat
şi se poate realiza o mai bună reprezentare a semnalului original. Datele pot fi eşantionate
simultan cu convertori multipli sau pot fi multiplexate, caz în care un convertor analogic-digital
(ADC) eşantionează un canal, apoi se mută la următorul canal şi îl eşantionează, apoi se mută la
următorul canal, şamd. Multiplexarea este o tehnică comună pentru a măsura mai multe semnale
cu un singur convertor ADC.
Rezoluţia – reprezintă numărul de biţi pe care îl foloseşte un convertor ADC pentru a
reprezenta semnalul analogic. Cu cât este mai mare rezoluţia, cu atât creşte numărul de diviziuni
ale domeniului (coduri) şi, în consecinţă, scade modificarea detectabilă de tensiune. Figura 8
arată o undă sinusoidală şi imaginea digitală corespondentă, obţinută cu un convertor ADC ideal
pe 3 biţi. Un convertor pe 3 biţi împarte domeniul analogic în 23 sau 8 diviziuni. Fiecare
diviziune este reprezentată de un cod binar având valorile între 000 şi 111. Este clar că
reprezentarea digitală nu este cea mai bună reprezentare a semnalului original analogic deoarece
s-a pierdut din informaţie pe parcursul conversiei. Prin creşterea rezoluţiei la 16 biţi, numărul de
coduri de la convertorul ADC creşte de la 8 la 65.536, obţinându-se astfel o reprezentare digitală

18
extrem de precisă a semnalului analogic, în condiţiile în care restul circuitului analogic de intrare
este proiectat corect.
Fig. 8 - Undă sinusoidală digitală cu rezoluţia de 3 biţi digitizată
Domeniul – acest termen se referă la nivelele minim şi maxim de tensiune pe care le
poate cuantifica convertorul ADC. Există dispozitive care oferă posibilitatea de a selecta
domeniile pentru ca aparatul să poată fi configurat şi a funcţiona cu o multitudine de nivele de
tensiune. Având această flexibilitate, domeniul semnalului poate fi armonizat cu cel al
convertorului ADC pentru a beneficia mai bine de rezoluţia măsurătorii.
Lăţimea codului – domeniul, rezoluţia şi amplificarea unui sistem DAQ sunt cele care
determină cea mai mică schimbare detectabilă de tensiune. Această schimbare reprezintă 1 LSB
(least significant bit) – cel mai puţin important bit, al valorii digitale şi este, de cele mai multe
ori, numit “lăţime a codului”. Lăţimea ideală a codului se poate afla prin împărţirea domeniului
de tensiune la amplificarea înmulţită cu 2 la puterea numărului biţilor de rezoluţie. De exemplu,
se consideră un dispozitiv pe 16 biţi care are un domeniu selectabil de la 0 la 10V sau de la -10 la
+10V şi o amplificare de 1, 2, 5, 10, 20, 50 sau 100. Cu un domeniu al tensiunii de la 0 la 10V şi
o amplificare de 100, lăţimea ideală a codului este definită cu ajutorul ecuaţiei:
10 V/(100 X 216
) = 1.5 µV
În evaluarea unui sistem de achiziţie de date trebuie avute în vedere şi alte caracteristici,
şi anume: nelinearitatea diferenţială (DNL), acurateţea relativă, timpul de stabilizare al
amplificatorului şi zgomotul.
Nelinearitatea diferenţială (DNL) – la modul ideal, pe măsură ce se creşte nivelul
tensiunii aplicate unui sistem DAQ, codurile de la convertorul ADC ar trebui să crească şi ele
liniar. Dacă se face graficul tensiunii faţă de codul de ieşire de la un convertor ADC ideal,
graficul respectiv ar fi o linie dreaptă. Deviaţiile de la această linie dreaptă sunt cunoscute ca
nelinearitate. DNL se măsoară în LSB pentru cazul cel mai rău al deviaţiei lăţimii de cod de la
valoarea ideală de 1 LSB. Un sistem DAQ ideal are valoarea DNL de 0 LSB. În practică însă, un
sistem DAQ bun are valoarea DNL de ±0,5 LSB.
Nu există o limită superioară pentru lăţimea unui cod. Codurile nu pot fi mai mici de 0
LSB, deci nelinearitatea diferenţială nu va fi niciodata mai proastă de -1 LSB. Un sistem DAQ
cu performanţe slabe poate avea o lăţime de cod egală cu 0 sau foarte aproape de 0, ceea ce
indică un cod lipsă. Indiferent ce tensiune se introduce într-un sistem DAQ care are un cod lipsă,
sistemul nu va cuantifica niciodată tensiunea la valoarea acestui cod. Uneori DNL este specificat
prin faptul că un sistem DAQ nu are coduri lipsă, ceea ce înseamnă că DNL are marginea de jos
la -1 LSB dar nu se fac alte specificaţii referitoare la limita de sus. O nelinearitate diferenţială

19
proastă reduce rezoluţia dispozitivului. Dacă sistemul DAQ din exemplul anterior, ce avea o
lăţime de cod de 1.5 V, are un cod lipsă uşor deasupra la 500 V, atunci creşterea tensiunii la
502 V nu este detectabilă. Numai atunci când tensiunea se creşte cu încă 1LSB, adică în
exemplul de faţă – peste 503 V, schimbarea de tensiune va fi detectabilă. Un DNL slab reduce
rezoluţia instrumentului.
Acurateţea relativă – aceasta reprezintă o măsură (în LSB) a deviaţiei celei mai proaste de
la funcţia de transfer a unui dispozitiv DAQ ideal, o linie dreaptă. Acurateţea relativă este
determinată prin conectarea unei tensiuni negative egală cu limita inferioară a scalei, digitizarea
tensiunii, apoi creşterea ei şi repetarea paşilor până când se acoperă tot domeniul de intrare al
dispozitivului. Când sunt reprezentate grafic, punctele digitizate vor apărea ca o linie dreaptă
aparentă.(fig 9a) Dar valorile liniei diferentei dintre linia ideală si linia aparentă pot fi extrase din
valorile digitizate şi apoi, făcut graficul acestor puncte rezultante.(fig 9b) Deviaţia maximă faţă
de 0 este acurateţea relativă a dispozitivului. Software-ul de driver al unui sistem DAQ poate
transpune valorile codului binar ale convertorului ADC în tensiune, prin multiplicarea cu o
constantă. O acurateţe relativă bună este importantă pentru un sistem DAQ deoarece asigură că
această transpunere a codului binar al convertorului ADC în valori de tensiune este corectă.
a bFig. 9 - Determinarea acurateţii relative a unui sistem DAQ
Timpul de stabilizare – este timpul necesar unui amplificator, circuit de comutaţie sau a
altui circuit electric pentru a atinge un mod stabil de operare. Amplificatorul de instrumentaţie
este foarte posibil să nu se stabilizeze atunci când se eşantionează câteva canale la amplificări
mari şi rate înalte. În asemenea condiţii, amplificatorul de instrumentaţie are dificultăţi în a
urmări diferenţele mari de tensiune, care pot apărea atunci cînd multiplexorul se comută între
semnalele de intrare. În mod normal, cu cât este mai mică amplificarea şi mai lent timpul de
comutare a canalului, cu atât mai puţin este nevoie să se stabilizeze rapid amplificatorul.
Zgomotul – orice semnal nedorit, care apare în semnalul digitizat al sistemului DAQ
reprezintă zgomot. Iar calculatorul este un mediu digital zgomotos. Prin plasarea unui convertor
ADC, a unui amplificator de instrumentaţie şi a unui circuit de interfaţă bus pe o placă, va
conduce la un dispozitiv foarte zgomotos. Proiectanţii folosesc ecranarea metalică a
dispozitivelor de achiziţie pentru a reduce zgomotul. O ecranare corespunzătoare trebuie

20
asigurată nu numai în jurul părţii analogice a sistemului de achiziţie, ci trebuie inclusă şi în
straturile plăcii de achiziţie multistrat.
Figura 10 arată un grafic al zgomotului asociat unui semnal de curent continuu, cu un
domeniu de intrare de ±10V şi o amplificare de 10 folosind un convertor analog digital de 16
biţi. Prin urmare, 1LSB = 31µV, deci un nivel al zgomotului de 20 LSB este echivalent cu
620µV de zgomot.
Fig. 10 - Intrarea unui amplificator care multiplexează semnale de curent continuu
Figura 11a arată zgomotul unui semnal DC pentru două dispozitive de achiziţie, ambele
folosind acelaşi convertor ADC. În prima figură, achiziţia are foarte puţine valori de cod la
zgomot nenul, iar distribuţia codurilor este Gaussiană, specifică unui zgomot aleator. Nivelul de
vârf al zgomotului este în intervalul ±3LSB. În figura 11b, este prezentat un alt sistem de
achiziţie, incorect ecranat, având un nivel de vârf al zgomotului plasat în intervalul ±20LSB.
În cazul instrumentelor de măsurare sofisticate, cum sunt plăcile de achiziţie de date
profesionale, se obţin nivele de acurateţe semnificativ diferite chiar dacă se utilizează aceleaşi
componente electronice. Proiectarea optimă a plăcilor de circuit multistrat şi alte soluţii de
ecranare pot asigura performanţe mult îmbunătăţite ale acestor plăci de achiziţie.
Fig. 11 - Graficul de distribuţie a zgomotului pentru 2 plăci de achiziţie diferite dar folosind
acelaşi convertor ADC pe 16 biţi
3.2.2. Ieşirile analogice
Deseori, este necesar un circuit de ieşire analogic într-un sistem DAQ, pentru a stimula
un sistem extern. Există câteva specificaţii ale convertorului digital-analogic (DAC) care

21
determină calitatea semnalului de ieşire, şi anume: timpul de stabilizare, rata de schimbare şi
rezoluţia ieşirii.
Timpul de stabilizare – este timpul necesar ieşirii pentru a se stabiliza la acurateţea
specificată. Acest timp este specificat, de obicei, pentru o modificare a tensiunii egală cu lăţimea
maximă a scalei.
Rata de schimbare – este rata maximă de modificare pe care o poate produce un
convertor DAC la semnalul de ieşire. Timpul de stabilizare şi rata de schimbare merg împreună
pentru a putea determina cât de repede schimbă convertorul DAC nivelul semnalului de ieşire.
Prin urmare, un convertor DAC cu un timp de stabilizare mic şi o rată de schimbare mare poate
genera semnale de înaltă frecvenţă deoarece este nevoie de foarte puţin timp pentru a modifica
cât mai precis ieşirea la un nou nivel de tensiune.
Un exemplu de aplicaţie care necesită performanţe înalte ale acestor parametri este
generarea de semnale audio. Convertorul DAC necesită o rată de schimbare mare şi un timp de
stabilizare mic pentru a genera frecvenţe înalte necesare acoperirii domeniului audio. Prin
contrast, un exemplu de aplicaţie care nu are nevoie de conversie rapidă digital/analogic este
sursa de tensiune care controlează un dispozitiv de încălzire (deoarece încălzirea este un proces
lent, nu este necesară o schimbare rapidă de tensiune şi deci, nici o conversie DAC rapidă).
Rezoluţia de ieşire – este similară rezoluţiei de intrare. Reprezintă numărul de biţi din
codul digital care generează ieşirea analogică. Un număr mare de biţi reduce valoarea fiecărei
creşteri de tensiune, făcând astfel posibilă generarea fără tranziţii în paşi mari a semnalelor.
Aplicaţiile care au nevoie de un domeniu dinamic larg cu creşteri mici ale modificărilor de
tensiune din semnalul de ieşire, este posibil să necesite ieşiri de tensiune de înaltă rezoluţie.
Declanşatorii (triggers) – multe dintre aplicaţiile DAQ au nevoie să pornească sau să
oprească o operaţie DAQ în funcţie de un anumit eveniment extern. Declanşatorii digitali
sincronizează achiziţia şi generarea de tensiune cu un puls digital extern. Declanşatorii analogici,
folosiţi la operaţiunile analogice de intrare, pornesc sau opresc o operaţie DAQ când un semnal
de intrare ajunge la un anumit nivel de tensiune şi o anumită polaritate a pantei.
Sincronizarea între dispozitive – în ultimii ani a fost dezvoltată o interfaţă de sincronizare
în timp real (RTSI). Astfel, cu ajutorul acesteia, se pot sincroniza conversiile analogic-digital,
digital-analogic, intrările digitale, ieşirile digitale, operaţiunile counter/timer. De exemplu, cu un
RTSI, două plăci de intrare analogice pot captura date simultan, în timp ce o a treia placă
generează un model digital de ieşire sincronizat cu rata de eşantionare a intrărilor.
3.2.3. Intrările / ieşirile digitale (DIO)
Interfeţele DIO sunt adesea utilizate la sistemele de achiziţie de date bazate pe PC pentru
a controla procesele, a genera modele de testare şi a comunica cu echipamentele periferice. În
fiecare caz, parametrii importanţi includ numărul de linii digitale valabile, rata la care se pot
primi sau genera datele digitale pe aceste linii şi capacitatea de a conduce a acestor linii. Dacă
liniile digitale se folosesc la controlarea unor evenimente, cum ar fi: deschiderea/închiderea unor
încălzitoare, motoare, lumini, atunci nu este necesară o rată înaltă de date, deoarece
echipamentul nu poate răspunde rapid. Numărul de linii digitale trebuie să se potrivească cu
numărul de procese de controlat. Pentru fiecare din aceste exemple, cantitatea de curent necesară
pentru a deschide şi închide aceste dispozitive trebuie să fie mai mică decât curentul continuu de
la dispozitiv. DIO poate fi folosit şi la aplicaţiile industriale, pentru a verifica dacă un
întrerupător este închis sau deschis şi pentru a controla nivelul tensiunii (înalt sau scăzut). DIO

22
poate fi, de asemenea, folosit pentru sincronizarea de viteză înaltă sau pentru metode de
comunicaţie mai simple. Folosind accesorii corespunzătoare de condiţionare a semnalelor
digitale, se pot folosi semnale de curent scăzut TTL pentru a monitoriza/controla tensiuni înalte
şi semnale de curent de la echipamente industriale sau pentru a conduce comutatoare externe. De
exemplu, tensiunea şi curentul necesare pentru a deschide şi închide o valvă mare poate fi de
ordinul a 100VAC la 2A. Deoarece ieşirea unui dispozitiv DIO este de la 0 la 5VDC la câţiva
miliamperi, este necesar un modul de condiţionare a semnalului, cum este SCXI, pentru a asigura
semnalul de putere de comutaţie necesar controlării valvei.
O aplicaţie comună DIO este aceea de transfer al datelor între un calculator şi un
echipament, cum ar fi: dispozitive de memorare externe, procesoarele de date, imprimantele.
Deoarece un asemenea echipament transferă datele cu un increment de 1 byte (8 biţi), liniile
digitale de la un dispozitiv DIO sunt aranjate în grupuri de câte 8. În plus, anumite dispozitive cu
capacitate digitală vor avea circuite de sincronizare pentru scopuri de comunicare-sincronizare.
3.2.4. Temporizator de intrare / ieşire
Circuitul contor/temporizator este util pentru multe aplicaţii, inclusiv pentru numărarea
apariţiilor unui eveniment digital, temporizarea unui puls digital, generarea de unde
dreptunghiulare şi pulsuri. Aceste aplicaţii pot fi implementate folosind trei semnale
contor/temporizator:
- poarta – este semnalul digital de intrare care se foloseşte pentru a activa sau
dezactiva funcţionarea contorului.
- sursa – este intrarea digitală care face ca, contorul să crească de fiecare dată când se
comută şi, drept urmare, furnizează baza de timp pentru operaţiunea contorului.
- ieşirea – generează unde digitale şi pulsuri la linia de ieşire.
Specificaţiile cele mai importante pentru un contor-temporizator sunt: rezoluţia şi
frecvenţa ceasului. Rezoluţia este numărul de biţi pe care îi foloseşte numărătorul (contorul). O
rezoluţie mare înseamnă pur şi simplu că contorul poate număra mai mult. Frecvenţa ceasului
determină cât de repede se poate comuta intrarea sursei digitale. La o frecvenţă mare de ceas de
operare, contorul poate creşte mai repede şi, prin urmare, poate detecta semnale de frecvenţă
înaltă la intrare şi genera pulsuri de înaltă frecvenţă şi unde dreptunghiulare.
3.3 Software-ul
Software-ul este cel care transformă calculatorul şi hardware-ul DAQ într-un sistem
complet de achiziţie de date, analiză şi prezentare a datelor. Fără software, care controlează
hardware-ul, dispozitivul de achiziţie de date nu va putea funcţiona corect. Marea majoritate a
aplicaţiilor DAQ utilizează driver software. Driver software-ul este acea parte din software care
programează direct regiştrii hardware-ului DAQ, reuşind să integreze operaţiunile în cadrul
resurselor calculatorului, cum sunt procesorul, DMA-ul, memoria. Driver software-ul ascunde
detaliile complicate ale programării, furnizând utilizatorului o interfaţă prietenoasă şi uşor de
înţeles sau o aplicaţie de sine stătătoare.
Dezoltarea susţinută a hardware-ului DAQ, a calculatoarelor şi software-ului continuă să
sublinieze importanţa şi valoarea unui driver software de calitate. Un driver software corect ales
poate produce combinaţia optimă între flexibilitate şi performanţă, în acelaşi timp, reducând

23
timpul necesar dezvoltării aplicaţiei DAQ. În alegerea unui driver software sunt câţiva factori
importanţi, ce trebuie avuţi în vedere, despre care detaliem mai jos.
Funcţionalitatea disponibilă – funcţiunile driver-ului pentru controlarea hardware-ului
DAQ pot fi grupate în: intrări/ieşiri analogice, intrări/ieşiri digitale, numărător/contor
temporizator de intrare/ieşire. Deşi marea majoritate a driver-elor vor avea aceste funcţionalităţi
de bază, trebuie asigurat că driver-ul poate face mai mult decât să conducă achiziţia şi să culeagă
date către/de la dispozitiv. Astfel, trebuie avut în vedere ca driver-ul să aibă capacitatea de a:
- testa canalele fără nici o programare prealabilă;
- culege date în plan secundar, în acelaşi timp cu procesarea lor în prim plan;
- utiliza intrări/ieşiri programate, întreruperi şi DMA pentru a transfera date;
- trasfera date către şi de la disk;
- efectua mai multe funcţii simultan;
- integra mai multe dispozitive DAQ;
- integra în mod unitar senzori şi o varietate de tipuri de semnal;
- furniza exemple ajutătoare pentru a putea începe activitatea.
Odată cu introducerea unui nou sistem de achiziţii de date, National Instruments a mărit
considerabil viteza, de la construirea unui program până la desfăşurarea unei aplicaţii de
măsurare de înaltă performanţă. DAQ Assistant, aplicaţie inclusă în acest sistem, furnizează un
ghid interactiv de configurare, testare şi achiziţie a datelor de măsurare. Prin comenzi simple, se
poate genera un cod bazat pe configuraţia existentă, făcând astfel mai uşoară şi mai rapidă
dezvoltarea unor operaţiuni complexe. Deoarece este condus numai din meniu, DAQ Assistant
nu va avea prea multe erori şi va scădea mult timpul primei măsurători.
Sistemul de operare utilizat împreună cu driver-ul – trebuie asigurată compatibilitatea
sistemului de operare cu driver software-ul. Driver-ul trebuie, de asemenea, proiectat pentru a
valorifica diversele capabilităţi şi caracteristici ale sistemului de operare. Totodată, este nevoie
de flexibilitate în transbordarea codurilor între platforme, de exemplu, de pe Windows pe
Macintosh. Sistemele de achiziţie de la National Instruments protejează software-ul, putându-se
schimba oricând hardware-ul sau sistemul de operare, fără vreo modificare sau cu mici
modificări ale aplicaţiei. Dacă driver-ul nu este potrivit pentru sistemul de operare disponibil,
National Instruments oferă produsul Measurement Hardware DDK. Este un driver kit de
dezvoltare care include opţiuni de dezvoltare şi interfaţă de programare pentru aplicaţii ce
necesită sisteme de operare non-standard.
Accesibilitatea funcţiunilor hardware-ului în software – problema apare atunci când se
achiziţionează un hardware DAQ, apoi se încearcă folosirea acelui hardware împreună cu
software-ul existent, pentru a se descoperi că o anumită caracteristică a hardware-ului nu este
suportată de software. Această problemă apare mai ales atunci când hardware-ul şi software-ul
sunt dezvoltate de companii diferite.
Limitarea performanţelor de către driver – deoarece driver-ul este un strat adiţional, poate
cauza o anumită limitare a performanţelor. În plus, sistemele de operare cum sunt Windows pot
avea latenţe semnificative. Dacă nu se utilizează într-un mod corespunzător, aceste latenţe pot
reduce mult performanţele sistemului DAQ. Sistemul de achiziţie de la National Instruments este
un driver performant care are un cod scris special pentru a reduce latenţele produse de Windows
şi pentru a furniza rate de achiziţie de până la 10 MS/s. Sistemele actuale de achiziţie de date,
mai noi ca versiunea NI-DAQ 7, faţă de cele dinaintea lui, care făceau ca realizarea operaţiunilor
curente să fie foarte complexe, elimină această problemă deoarece driver software-ul este
integral multitask, poate realiza simultan diverse operaţiuni fără a se bloca. În present, se pot face

24
simultan intrări analogice, ieşiri digitale şi operaţiuni de numărare, fără nevoia de a adăuga
coduri pentru a manevra achiziţii simultane.
Aplicaţiile software utilizate cu driver-ul existent – întâi ne asigurăm că driver-ul este
proiectat pentru a lucra bine în mediul existent. Un limbaj de programare, cum este Visual Basic,
are un mediu de dezvoltare bazat pe evenimente, care utilizează controale pentru a dezvolta
aplicaţia. Dacă se dezvoltă o aplicaţie în Visual Basic, trebuie asigurat că driver-ul are
controalele necesare pentru a se potrivi cu metodologia limbajului de programare respectiv.
Programare sau nu – o cale suplimentară de a programa un hardware DAQ este folosirea
software-ului de aplicaţie. Avantajul acestuia este că adaugă capabilităţi de analiză şi prezentare
driver software-ului. Software-ul de aplicaţie integrează, de asemenea, controlul instrumentului
cu achiziţia de date. În acest sens, National Instruments oferă trei tipuri de software de aplicaţie:
- LabVIEW, care are metodologie de programare grafică;
- LabWindows/CVI, pentru programatorii clasici în C;
- Measurement Studio, pentru Visual Basic, C++ şi .NET,
toate trei putând fi folosite pentru instrumentare completă, achiziţie şi aplicaţii de control. Toate
produsele pot fi îmbogăţite cu kituri de instrumente pentru funcţionalităţi speciale. VI Logger
(fig. 12)este un instrument foarte uşor de folosit şi flexibil, proiectat special pentru aplicaţiile de
achiziţie la intervale prestabilite şi pe durate mari a datelor.
Fig. 12 - Software-ul de aplicaţie “VI Logger” de la National Instruments
Dezvoltarea sistemului – pentru a dezvolta un sistem DAQ de calitate pentru măsurători
şi control sau teste şi măsurători, trebuie înţeleasă fiecare componentă în parte implicată în
proces. Dintre toate componentele sistemului DAQ, elementul care ar trebui examinat cel mai
bine este software-ul. Deoarece dispozitivele DAQ plug-in nu au afişaj, software-ul este singura
interfaţă cu sistemul. Software-ul este componenta care retransmite toate informaţiile despre
sistem şi este elementul care controlează sistemul. Software-ul integrează traductorii,
condiţionarea semnalului, hardware-ul DAQ şi hardware-ul de analiză într-un sistem DAQ
complet şi funcţional. De aceea, când se dezvoltă un sistem DAQ, trebuie evaluat foarte atent
software-ul. Componentele hardware-ului pot fi selectate prin determinarea cerinţelor sistemului
şi asigurarea că specificaţiile sunt compatibile cu sistemul şi necesităţile

25
Fig. 13 - Funcţiunea de procesare a semnalului din LabWindows/CVI poate face analiza în
frecvenţă şi filtrarea datelor
3.4 Senzori şi semnale de înaltă tensiune
Traductoarele detectează fenomenele fizice şi produc semnale electrice, care pot fi
măsurate de către sistemul de achiziţie de date DAQ. De exemplu, termocuplurile, dispozitivele
cu rezistenţă variabilă cu temperatura, termistoarele convertesc temperatura într-un semnal
analogic, care poate fi măsurat de către un convertor ADC. Alte exemple includ traductoarele cu
mărci tensometrice, traductoarele de debit şi presiune. Pentru fiecare caz în parte, semnalele
electrice produse sunt proporţionale cu parametrii fizici pe care îi monitorizează.
Semnalele electrice generate de traductoare trebuie să fie optimizate pentru domeniul de
intrare al sistemului DAQ. Accesoriile de condiţionare a semnalului amplifică semnalele de nivel
scăzut, apoi le izolează şi le filtrează, pentru a rezulta măsurători cât mai corecte. Unele
traductoare necesită excitaţie în tensiune sau curent pentru a genera ieşire de tensiune. Aceste
accesorii de condiţionare a semnalului pot fi folosite într-o varietate de aplicaţii foarte
importante.
Amplificarea – cel mai folosit mod de condiţionare. Semnalele de nivel scăzut ale
termocuplului, de exemplu, ar trebui amplificate pentru a creşte rezoluţia şi a reduce zgomotul.
Pentru a avea cea mai înaltă acurateţe posibilă, semnalul ar trebui amplificat astfel încât
domeniul maxim de tensiune al semnalului condiţionat să fie egal cu domeniul maxim de intrare
al convertorului ADC.
Izolarea – o altă aplicaţie comună de condiţionare a semnalului. Aceasta izolează
semnalul traductorului de la calculator în scopuri de siguranţă. Sistemul care este monitorizat
poate genera şi variaţii bruşte de tensiune înaltă, care poate deteriora calculatorul fără
condiţionare a semnalului. Un motiv în plus pentru izolare este şi asigurarea că citirile de la
dispozitivul DAQ nu sunt afectate de diferenţele de tensiune mod comun (diferenţe de potenţial
de împământare). Atunci când intrările sistemului DAQ şi semnalul de achiziţionat sunt fiecare
raportate la o împământare, problemele apar dacă există vreo diferenţă potenţială între cele două
împământări. Această diferenţă poate conduce la ceea ce se numeşte “buclă de împământare”,
ceea ce duce la o reprezentare incorectă a semnalului achiziţionat. Dacă diferenţa este prea mare,
poate deteriora sistemul de măsurare. Folosind module dedicate de condiţionare a semnalului, se
elimină aceste bucle de împământare şi se asigură achiziţionarea exactă a semnalului.
Filtrarea – scopul filtrării este acela de a înlătura diversele semnale nedorite din semnalul
care este măsurat. La semnalele de curent continuu, cum este temperatura, se folosesc filtre de

26
zgomot, pentru a atenua semnalele de frecvenţă înaltă, ce pot reduce acurateţea măsurătorii.
Semnalele de curent alternative, cum este vibraţia, necesită un tip diferit de filtru. Acesta înlătură
aproape complet toate semnalele care sunt a căror frecvenţă este mai mare decât lărgimea de
bandă a dispozitivului.
Excitaţie – pentru anumite traductoare, dispozitivele de condiţionare a semnalului
generează excitaţie. Aparatele de măsură cu mărci tensometrice, rezistenţele termovariabile,
dispozitivele cu rezistenţă dependentă de temperatură, toate au nevoie de semnale de excitaţie
externe de tensiune sau curent. Modulele de condiţionare a semnalului furnizează, de obicei,
aceste semnale. Măsurătorile dispozitivelor cu rezistenţă dependentă de temperatură sunt
realizate cu o sursă de curent care converteşte variaţia rezistenţei în tensiune măsurabilă.
Aparatele de măsură cu mărci tensometrice, care sunt dispozitive cu rezistenţe foarte mici sunt
folosite într-o configuraţie tip punte Wheatstone cu o sursă de excitaţie de tensiune.
Liniarizarea – o altă condiţionare uzuală a semnalului. Multe dintre traductoare, cum sunt
termocuplurile, au un răspuns neliniar la schimbările fenomenului ce se măsoară. Pentru a avea o
valoare numerică proporţională cu mărimea măsurată este necesară prelucrarea valorilor
achiziţionate de la traductor, în vederea corectării comportamentului neliniar al acestuia.
3.5 Extensii ale tehnologiei PC
Tehnologiile noi şi îmbunătăţite în domeniul legat de calculatoare au dezvoltat lumea
achiziţiilor de date la noi nivele. Achiziţia de date nu mai este limitată la un calculator personal
sau un instrument, ci este utilizabilă şi pentru alte sisteme de calcul.
PXI – extensii PCI pentru instrumentaţie (PCI Extensions for Instrumentation). Sistemele
PXI oferă soluţii robuste, compacte şi accesibile financiar pentru dezvoltarea aplicaţiilor de
achiziţii de date. PXI ridică standardul tehnologiilor PC, cum este Windows-ul, permiţând
utilizatorului să dezvolte aplicaţii cu mai multe limbaje de programare, printre care cele mai
cunoscute sunt: LabView, LabWindows/CVI. O sincronizare foarte bună între mai multe
dispozitive poate fi obţinută prin integrarea în bus-ul PXI a bus-ului PCI împreună cu un semnal
de ceas de 10MHz, a unui semnal de trigger PXI Star şi a comunicaţiei RTSI (interfaţă de
sincronizare în timp real). La proiectarea unui sistem PXI sunt disponibile diverse dispozitive de
achiziţie de date, pornind de la plăci standard multifuncţionale DAQ, ce includ seria M, seria S şi
seria E, până la instrumente specializate, cum sunt multimetrele digitale, digitizorii de mare
viteză şi generatoare de funcţie arbitrară.
Timp real – Sistemele în timp real furnizează performanţe deterministe, siguranţă
crescută în exploatare şi operaţiuni stabile. Performanţele deterministe sunt necesare pentru
aplicaţii ca controlul dinamometrelor şi testarea electronică a unităţii de control, cazuri în care
operaţiunile trebuie să fie complete într-o perioadă de timp determinată. Pe lângă performanţele
deterministe, sistemele în timp real oferă şi un grad ridicat de siguranţă deoarece ele sunt
dedicate executării câte unei operaţiuni pe rând; atâta vreme cât sistemul este alimentat, aplicaţia
continuă să ruleze, făcând sistemele în timp real ideale pentru componente critice, cum este
închiderea de siguranţă. În ultimul timp, asemenea sisteme nu mai au nevoie de interacţiunea cu
utilizatorul; astfel, se pot desfăşura ca nişte sisteme exclusive. Dezvoltarea programelor de
achiziţie de date în timp real are loc pe un calculator de birou, apoi fiind dat în sarcina unui
controler în timp real.
Personal Digital Assistants (PDA-uri) – aceste instrumente au o largă răspândire şi
satisfac o cerere crescândă de reducere a mărimii echipamentelor odată cu creşterea mobilităţii şi

27
modularităţii. Se poate beneficia de această tehnologie folosind LabVIEW. Cu ajutorul
modulului LabVIEW 7 PDA şi a sistemului de dezvoltare LabVIEW, se poate rula VI pe
calculatoarele Microsoft Pocket şi dispozitivele Palm OS PDA. Apoi, cu un card PCMCIA DAQ,
se poate folosi un mini-calculator pentru a achiziţiona şi analiza datele oriunde se află PDA-ul.
Cap. IV - Principiile măsurării în curent continuu sau la frecvenţă joasă
4.1 Aparatele de măsură de curent continuu şi la frecvenţă joasă
Iniţial, pentru măsurarea curentului continuu sau a frecvenţelor joase se foloseau
galvanometre, punţi Wheatstone şi aparate termice de măsurat curentul alternativ. Aceste aparate
erau greu de folosit şi erau foarte lente, bazându-se pe măsurători manuale. Apoi s-a construit
multimetrul digital DMM, care a simplificat mult măsurătoarea. Acum aparatele au incluse
funcţii, precum calculul inductanţei şi capacitanţei, eliminând necesitatea aparatelor complexe
LCR.
Caracteristicile multimetrului digital (DMM):
Măsoară tensiune înaltă
Măsurătoare izolată – până la 100V
Rezistenţă mare de intrare (GΩ, 10 pA)
Condiţionarea semnalului integrată
Produce rezultate procesate, total calibrate
Protecţie mare faţă de DAQ clasice
Combinat deseori cu sisteme de comutaţie
4.1.1 Rata respingerii de mod comun (CMRR)
Când se măsoară la frecvenţe joase se va folosi un dispozitiv cu intrare flotantă cum este
un DMM. Avantajul unui astfel de instrument, cel puţin pentru o bandă de frecvenţă, este că
CMRR tinde să fie extrem de mare. Unele aparate vor avea specificat 120-140 dB de CMRR.
În mod convenţional, se specifică această respingere cu un rezistor de 1 kΩ cuplat la
intrarea de potenţial electric scăzut (fig. 14). Acest lucru nu înseamnă neapărat faptul că
rezistorul trebuie să fie prezent pe parcursul măsurătorii. La anumite aplicaţii cu comutaţie, acest
rezistor apare datorită rezistenţei electrice a comutatorului. Se consideră următorul exemplu:
dacă introducem 300V într-un aparat de curent continuu, cum ar fi un multimetru cu 140 dB
CMRR, eroarea de intrare rezultată este mai mică de 30 V. De fapt, majoritatea multimetrelor
vor avea un CMRR mai mare dacă rezistorul de 1 kΩ nu este în circuit.
Tensiunile de curent alternativ în modul comun sunt o provocare, mai ales dacă se
foloseşte un rezistor de 1 kΩ, deoarece capacitatea parazită datorată ecranării cablurilor şi
capacităţii transformatoarelor, se află deseori în „bariera de izolare” a dispozitivului de măsurat.

28
Fig. 14 - Rata respingerii de mod comun
Să considerăm exemplul unui termocuplu. Dacă dorim să măsurăm temperatura unui
dispozitiv care este legat la tensiunea de alimentare a liniei, la 220V, un CMRR de 120dB apare
ca o eroare de 220μV pe multimetrul digital. Această eroare este mare pentru un termocuplu,
ştiind că acesta are mai puţin de 40 V/ C. Multe multimetre măsoară însă mult mai bine, chiar
de 100 de ori (40dB mai bine), unul din motive fiind că rezistorul de 1 kΩ nu face parte din
circuitul de măsurare.
4.2 Principiile măsurării RMS în curent alternativ (AC RMS)
Pentru o precizie mare a măsurării RMS în AC, utilizatorii trebuie sa fie atenţi deoarece
unele echipamente au doar punte de rectificare, nu şi convertori adevăraţi RMS. Semnalele de
current alternativ AC sunt caracterizate prin amplitudinea RMS, care este o măsură a energiei lor
totale. Pentru a calcula valoarea RMS a unei unde, trebuie calculată valoarea medie pătratică a
nivelului semnalului. Majoritatea multimetrelor digitale fac această procesare neliniară a
semnalului în domeniul analogic, dar multimetrele NI folosesc un procesor de semnal digital
“Digital Signal Processor (DSP)” pentru a calcula valoarea RMS din eşantioanele digitizate ale
undei de curent alternativ. Rezultatul este o măsurătoare AC cu zgomot redus, cu bună acurateţe
şi durată redusă de stabilizare.
De asemenea, trebuie cunoscut domeniul frecvenţei semnalului pe care îl achiziţionăm.
Unele dispozitive de măsurare sunt utile doar la frecvenţe joase, nu şi pentru semnalele complexe
sau audio. Dacă se măsoară valoarea RMS a unui tren de impulsuri, este necesară o bandă de
frecvenţă a sistemului de achiziţie mai largă decât frecvenţa de bază a semnalului. Trebuie
asigurată o bandă de frecvenţă a achiziţiei cel puţin de 10 ori mai mare decât banda semnalului
original.
4.2.1 Studiul factorului de vârf (Crest Factor)
Acest factor reprezintă un parametru important când vrem să măsurăm cu acurateţe
semnale de frecvenţă joasă; este determinat prin formula:
)
Pentru o sinusoidă, factorul de vârf este 1.414, iar pentru un semnal pătratic periodic cu
factor de umplere 50%, factorul de vârf este 1. Această specificaţie este importantă pentru că
arată valoarea maximă a undei pe care multimetrul o poate măsura fără a se supraîncărca sau a da

29
erori. De exemplu, pentru un multimetru cu acurateţe în curent alternativ de 0.03% (parametru
indicat întotdeauna pentru o undă sinusoidală) cu o eroare adiţională de 0.2% şi un factor de vârf
între 1.414 şi 5, eroarea totală a măsurătorii unei unde triunghiulare (factor de vârf=1.73) este
0.03 % + 0.2 % = 0.23 %.
În timp, realizarea de măsurători de curent alternativ AC cu multimetrele digitale a fost
foarte dificilă. Metodele clasice sunt valabile pentru semnale cu valori înalte ale factorului de
vârf. Dacă nu se ştie valoarea factorului de vârf, este dificil de previzionat acurateţea măsurătorii.
De asemenea, semnalele de nivel scăzut, de înaltă frecvenţă sunt prost măsurate de către
majoritatea multimetrelor, din cauza tehnicii analogice folosite. Această tehnică foloseşte diode
rectificatoare active, care nu ţin pasul când frecvenţa creşte decât dacă sunt forţate (de exemplu,
amplitudini înalte).
Metoda folosită de un multimetru digital NI nu este influenţată de eroarea factorului de
vârf şi este capabilă de măsurători de nivel scăzut, limitate inferior în principal de zgomot. Deci,
cât timp specificaţiile permit amplitudini ale semnalului de 1%, în practică domeniul de măsurare
se extinde de cel puţin 10 ori în jos.
4.3 Măsurarea rezistenţei
Există trei configuraţii de măsurare a rezistenţei mai des folosite:
2 fire
4 fire
ohmi cu compesare de offset
Măsurarea cu 2 fire
Metoda este frecvent utilizată pentru că este una dintre cele mai simple şi directe metode.
Cu 2 fire se pot obţine rezultate precise peste 100 kΩ, destul de uşor. Pentru valori mai mici ale
rezistenţei, de 100 Ω, cablurile de măsurare adăugă propria lor rezistenţă, uneori semnificativă,
ce poate afecta mult măsurătoarea. Cuprul este materialul cel mai des folosit la cablare. El are un
coeficient de temperatură de 3000 ppm/ºC, ce poate afecta măsurătoarea datorită instabilităţii
rezistenţei cablurilor.
Metodologia acestei tehnici, în contextul unui sistem automat de măsurare, cu comutatori
programabili, este după cum urmează:
1. Se scurtează lungimea firelor pentru a fi aparatul cât mai aproape de rezistenţă. Dacă
măsurătoarea face parte dintr-un sistem de comutare automat, se dedică un canal de comutare
special pentru valoarea zero. În timpul ciclului de măsurare, se închide comutatorul de pe canalul
special (măsoară valoarea zero).
Fig. 15 - Îndepărtarea rezistenţei firelor într-un sistem cu 2 fire

30
2. Se înregistreză offset-ul pe canalul zero.
3. Se comută pe canalul dorit.
4. Se măsoară valoarea rezistenţei.
5. Se scade valoarea de offset din valoara rezistenţei pe canalul selectat.
6. Rezultatul este rezistenţa dorită.
Metoda are următoarele limitări:
- dacă releul de zero are o rezistenţă de contact diferită de celelalte relee, apare o eroare;
- dacă este posibil, se va folosi un cablu pentru canalul de zero cu lungime foarte apropiată
de lungimea cablurilor la măsurarea rezistenţei;
- această metodă nu corectează rezistenţa picioruşelor metalice ale componentei pe care o
testează;
- o întârziere care apare în sistem este asociată închiderii releului de zero şi efectuării unei
noi măsurători;
- stabilitatea releului în poziţia închis poate limita acestă metodă până la o repetabilitate de
aproximativ ±20 mΩ.
Metoda cu 4 fire
Pentru măsurători de precizie ale rezistenţelor sub 100 kΩ, metoda cu 4 fire este mai
bună decât cea cu 2 fire. Ea necesită 4 fire de comutare şi mai multe cabluri, dar depinde de cât
de precisă vrem să fie măsurătoarea şi de complexitatea sistemului.
Schema cu 4 fire este arătată în figura 16 şi include rezistenţa firelor şi a comutatoarelor.
Rezistenţa cablurilor (leads) în serie cu intrarea de Sense nu este o problemă deoarece circuitul
care generează tensiunea Vm măsurată de multimetru nu generează curent. Metoda elimină
efectul cablurilor şi modificările rezistenţei de comutaţie, cât timp se alege un punct de Sense cât
mai aproape de rezistenţa pe care o măsurăm.
Fig. 16 - Măsurarea cu 4 fire
Ohmi cu compensare de offset(fig. 17)
Metoda elimină tensiunile mici de offset în serie cu rezistorul de testat datorate uzual
fenomenelor termice. Pentru simplitate, considerăm metoda cu 2 fire, dar poate fi folosită la fel
de bine şi cu cea cu 4 fire.
Măsurătoarea implică 2 cicluri. În primul ciclu, măsurătoarea este făcută normal. Apoi
sursa de curent este oprită şi se mai măsoară o dată. De această dată, singura tensiune din circuit
care poate fi măsurată este VTHERMAL. Pe Rx nu există tensiune deoarece sursa este oprită. Dacă

31
se scad rezultatele celor 2 cicluri, rămâne valoarea exactă a rezistenţei. Valoarea lui VTHERMAL
este aceeaşi la ambele cicluri, de aceea se scade.
Fig. 17 - Ohmi cu compesare de offset
Ca atare,
4.4 Măsurarea curentului (Amperi)
Ideea de bază de la care se porneşte în măsurarea curentului este că ea trebuie realizată
fără întreruperea circuitului de testat. Aceasta se realizează foarte uşor dacă aparatul de măsură
se comportă ca un scurt-circuit. În realitate însă, nici un aparat de măsurare a curentului nu este
ideal, toate având o mică rezistenţă. Tensiunea care trece prin această rezistenţă în timpul
măsurătorii se numeşte “tensiune de sarcină” (Voltage Burden). Acestă tensiune poate
compromite măsurătoarea, de aceea este de preferat ca valoarea ei să fie cât mai mică.
O problemă des întâlnită la măsurarea curentului este distrugerea siguranţei, prin
conectarea unei tensiuni electrice la intrările de curent. Siguranţele se mai pot distruge şi datorită
supraîncâlzirii firelor circuitului. Dacă DMM acţionează ca un întrerupător care porneşte întreg
circuitul, supracurentul poate şi el distruge siguranţele.
Cu cât curentul este mai mare, cu atât mai mare va fi şi tensiunea ce cade pe rezistenţa
cablurilor şi întrerupătoarelor din sistem. Pentru a evita această situaţie, cel mai bine este să se
folosească şunturi externe conectate la terminalele de măsurare a tensiunii de sarcină ale
multimetrului digital.

32
Fig. 18 - Principiul tensiunii de sarcină
Cap. V - Bazele eşantionării analogice
5.1 Definiţia lăţimii de bandă / calcule
Lăţimea benzii de frecvenţă (deseori denumită simplificat lăţimea benzii sau de bandă)
este definită ca o caracteristică a unui circuit sau canal de transmisie, ce lasă să treacă un semnal
fără atenuări semnificative pentru un domeniu de frecvenţe dat. Lăţimea benzii se măsoară între
punctele de frecvenţă minimă şi maximă, unde amplitudinea semnalului scade la – 3dB sub
frecvenţa de trecere. Punctele de – 3dB corespund unei înjumătăţiri a puterii la trecerea prin
circuit.
Unitatea de măsură: Hertz [Hz]
Exemplu: dacă se utilizează un semnal sinusoidal de 100Mhz, la o tensiune de 1V şi un
digitizor de mare viteză cu lăţimea de bandă de 100Mhz, semnalul va fi atenuat de calea de
intrare analogică a digitizorului, iar unda eşantionată va avea o amplitudine de 0,7V(fig.19).
Această valoare ( 0,7V ) se poate obţine şi cu ajutorul ecuaţiei:
unde:
Vppout = tensiunea vârf-la-vârf a undei de ieşire
Vppin = tensiunea vârf-la-vârf a undei de intrare = 1V
-3 = 20 log (Vppout/1)
Vppout = 0.7079V 0.7V
Fig. 19 - Atenuarea unei unde sinusoidale de 100Mhz când trece printr-un digitizor de 100Mhz

33
Fig. 20 - Răspunsul de intrare al unui digitizor de 100Mhz
5.2 Eroarea de amplitudine teoretică a unui semnal măsurat
Este recomandat ca lăţimea benzii unui digitizor să fie de 3 până la 5 ori mai mare decât
componenta de interes cu cea mai înaltă frecvenţă din semnalul măsurat, pentru a achiziţiona
semnalul cu o eroare minimă de amplitudine. Eroarea de amplitudine teoretică a unui semnal
măsurat poate fi calculată astfel:
unde:
R = B / fin
B = lăţimea benzii digitizorului
fin = frecvenţa semnalului de intrare
Folosind datele din exemplul de mai sus, în formula erorii de amplitudine, pentru R = 1,
se va obţine o eroare de aproximativ 29,3 %. Referitor la figura precedentă, aceasta ar înseamna
că dacă unda de intrare are amplitudinea la vârf de 1 V, atunci unda de ieşire va avea
amplitudinea la vârf de aprox. 0,707 V.
5.3 Timpul de creştere(fig. 21)
Un alt subiect important legat de lăţimea benzii este timpul de creştere. Timpul de
creştere al unui semnal de intrare este timpul în care un semnal face trecerea de la 10% la 90%
din amplitudinea sa maximă şi este în relaţie inversă cu lăţimea benzii.
Fig. 21 - Timpul de creştere pentru un semnal

34
Este recomandat ca timpul de creştere al căii de intrare a digitizorului să fie între 1/3 şi
1/5 din timpul de creştere al semnalului măsurat, pentru a putea achiziţiona semnalul cu o eroare
minimă a timpului de creştere. Timpul de creştere teoretic măsurat (Trm) poate fi calculat
pornind de la timpul de creştere al digitizorului (Trd) şi timpul de creştere efectiv al semnalului
de intrare (Trs).
De exemplu, dacă un semnal sinusoidal cu timpul de creştere de 15ns este trecut printr-un
digitizor de mare viteză tip NI 5122, care are un timp de creştere de 3,5ns, folosind ecuatia de
mai sus, timpul de creştere teoretic măsurat pentru semnalul sinusoidal ar fi de aprox. 15,4ns.
5.4 Rata de eşantionare
Rata de eşantionare este rata la care sunt eşantionate datele.
Rata de eşantionare nu este raportată direct la lăţimea benzii unui digitizor de înaltă
viteză. Ea este viteza la care convertorul ADC al digitizorului converteşte semnalul de intrare în
valori digitale, după ce semnalul a trecut prin calea de intrare analogică. Deci, digitizorul
eşantionează semnalul după ce a fost aplicată orice atenuare, amplificare şi/sau filtrare de către
calea de intrare analogică şi transformă unda rezultată în reprezentare digitală. Rata de
eşantionare a unui digitizor de mare viteza se bazează pe ceasul de eşantionare, care dă tactul
atunci când ADC transformă tensiunea analogică instantanee în valori digitale.
Unitatea de măsură: eşantioane/secundă (S/s)
Exemplu: digitizorii de mare viteză de la National Instruments oferă o rată de eşantionare
variabilă reală derivată din rata de eşantionare maximă a dispozitivului. Rata de eşantionare
maximă a dispozitivului provine din rata la care oscilează componenta hardware numită
“oscilator cu cristal”. Rate de eşantionare mai scăzute sunt posibile totuşi prin împărţirea ratei
maxime de eşantionare la o valoare întreagă. De exemplu, digitizorul NI 5124 are o rată maximă
de eşantionare de 200 MS/s şi poate fi setat la rate de 200/n MS/s, în care n = 1, 2, 3, 4...
Convertor Analog-Digital Valorile digitale reprezintă nivelele de tensiune
Fig. 22 - Eşantionarea unei unde sinusoidale folosind un digitizor de 3 biţi
5.5 Teorema lui Nyquist şi frecvenţa lui Nyquist
Teorema lui Nyquist se poate scrie astfel:
rata de eşantionare (f s) >2 * componenta de interes cu cea mai înaltă frecvenţă
din semnalul măsurat

35
Teorema lui Nyquist susţine că un semnal trebuie să fie eşantionat la o rată mai mare
decât dublul frecvenţei celei mai înalte de interes pentru a putea capta componenta de interes cu
cea mai înaltă frecvenţă; altfel, conţinutul frecvenţei înalte se va regasi deplasat în cadrul
spectrului de interes (banda de trecere). Astfel, se spune că cea mai înaltă frecvenţă din semnal
trebuie să fie mai mică decât frecvenţa Nyquist, egală cu jumătate din frecvenţa de eşantionare.
O întrebare des pusă este “cât de repede trebuie facută eşantionarea ?”
Figura 23 prezintă efectele diferitelor rate de eşantionare. În cazul A, unda sinusoidală de
frecvenţă f este eşantionată la aceeaşi frecvenţă f. Unda reconstruită apare ca o undă asociată de
tip DC. Dacă se măreşte rata de eşantionare la 2f, unda digitizată va avea frecvenţa corectă
(acelaşi număr de cicluri) dar va apărea sub formă triunghiulară. Acest caz ilustrează teorema lui
Nyquist. Prin creşterea şi mai mult a ratei de eşantionare, de exemplu 5f, se poate reproduce şi
mai corect unda iniţială. În cazul C, rata de eşantionare este de 4f/3. Frecvenţa Nyquist în acest
caz este (4f/3) / 2 = 2f/3. Deoarece f este mai mare decât frecvenţa Nyquist, această rată de
eşantionare va reproduce o undă asociată de frecvenţă şi formă incorectă.
Fig. 23 - Efectele variaţiei ratei de eşantionare în timpul eşantionării unui semnal
5.6 Filtre de asociere şi anti-asociere
Dacă un semnal este eşantionat la o rată de eşantionare mai mică decât dublul frecvenţei
Nyquist, apare o componentă de frecvenţă falsă mai mică în datele eşantionate. Fenomenul se
numeşte “aliasing” – asociere.
Figura 24 arată o undă sinusoidală de 5 MHz digitizată de un convertor ADC de 6 MS/s.
Linia punctată indică semnalul asociat înregistrat de către convertor. Frecvenţa de 5 MHz este
măsurată ca o frecvenţă asociată în banda de trecere, apărând astfel într-un mod înşelător ca o
undă sinusoidală de 1 MHz.
Fig. 24 - Undă sinusoidală ce demonstrează fenomenul de asociere

36
5.6.1 Frecvenţa de asociere
Frecvenţa de asociere este valoarea absolută a diferenţei dintre frecvenţa semnalului de
intrare şi cel mai apropiat multiplu întreg al ratei de eşantionare.
frecvenţa de asociere = ABS (cel mai apropiat multiplu al
frecvenţei de eşantionare – frecvenţa de intrare)
unde:
ABS înseamnă valoarea absolută
Semnalele din lumea reală conţin deseori componente ale frecvenţei care sunt situate
deasupra frecvenţei Nyquist. Aceste frecvenţe sunt asociate în mod eronat şi adăugate
componentelor semnalului, care sunt eşantionate, producând astfel date eşantionate distorsionate.
La sistemele la care se doreşte realizarea de măsurători corecte folosind date eşantionate, rata de
eşantionare trebuie să fie setată suficient de înaltă (cam de 5 până la 10 ori cea mai înaltă
componentă a frecvenţei din semnal) pentru a preveni fenomenul de asociere sau trebuie introdus
un filtru opţional anti-asociere (un filtru trece-jos, care atenuează orice frecvenţă din semnalul de
intrare mai mare decît frecvenţa Nyquist), înainte ca convertorul ADC să restricţioneze lăţimea
benzii semnalului de intrare pentru a îndeplini criteriul de eşantionare.
De exemplu, la dispozitivul NI 4461 (achiziţie de semnal dinamic), intrările analogice au
introduse în hardware atât filtre analogice, cât şi filtre digitale, pentru a preveni fenomenul de
asociere. Semnalele de intrare sunt trecute mai întâi printr-un filtru analogic fix pentru a înlătura
orice semnale cu componente ale frecvenţei sub domeniul convertorului ADC. Apoi, filtrele anti-
asociere digitale îşi ajustează automat frecvenţa de oprire a benzii pentru a elimina orice
componente ale frecvenţei peste jumătatea valorii ratei de eşantionare programată.
Exemplu: fie fs (rata de eşantionare) de 100 Hz, iar semnalul de intrare conţine
următoarele frecvenţe: 25 Hz, 70 Hz, 160 Hz şi 510 Hz. Aceste frecvenţe sunt arătate în figura
25.
Fig. 25 - Frecvenţele originale prezente în semnalul de intrare
După cum se va vedea în fig. 26, toate frecvenţele sub valoarea frecvenţei Nyquist (fs/2 =
50 Hz) sunt eşantionate corect. Frecvenţele aflate peste valoare frecvenţei Nyquist apar ca
asociate. De exemplu, F1 (25 Hz) apare la frecvenţa corectă dar F2 (70 Hz), F3 (160 Hz) şi F4
(510 Hz) au frecvenţe asociate la 30 Hz, 40 Hz şi 10 Hz.

37
Fig. 26 - Frecvenţele originale şi asociate ce apar în semnalul măsurat după ce trec prin
convertorul ADC
F2 = 100-70 = 30Hz
F3 = (2)100 – 160 = 40Hz
F4 = (5)100 – 510 = 10Hz
5.7 Eroarea de cuantificare
Cuantificarea este definită ca fiind procesul de conversie al unui semnal analogic în
reprezentare digitala. Ea este realizată de un convertor analogic-digital. Dacă se converteşte
semnalul analogic la un şir de date digitale, se poate beneficia de puterea calculatorului şi
software-ului pentru a face diverse manipulări şi calcule cu semnalele. Pentru a putea face acest
lucru, trebuie eşantionată unda analogică la momente de timp discrete bine definite astfel încât să
se menţină o relaţie strânsă între timpul din domeniul analogic şi timpul din domeniul digital. În
acest fel, poate fi reconstruit semnalul în domeniul digital, poate fi procesat, iar mai tarziu,
reconstruit din nou în domeniul analogic, dacă este nevoie de acest lucru.
Fig. 27 - Când se converteşte un semnal analogic în domeniul digital, valorile semnalului se iau
la momente de timp distincte
Rezoluţia în timp este limitată de rata maximă de eşantionare a convertorului ADC. Chiar
dacă s-ar putea creşte rata de eşantionare permanent, nu va fi niciodată un timp continuu pur, aşa
cum este semnalul de intrare din figura 27. Pentru majoritatea aplicaţiilor din lumea reală,
reprezentarea analogică este încă foarte folositoare în ciuda limitelor sale. Dar în mod evident
utilitatea reprezentărilor digitale creşte pe măsură ce cresc rezoluţia în timp şi amplitudinea.
Rezoluţia amplitudinii este limitată de numărul de nivele de ieşire discrete pe care le are un
convertor ADC.
De exemplu, un convertor ADC de 3 biţi împarte domeniul în 23 sau 8 diviziuni. Fiecare
diviziune este reprezentată de un cod binar între 000 şi 111. Convertorul ADC transformă fiecare

38
măsurătoare a semnalului analogic într-una din diviziunile digitale. Figura 28 arată imaginea
digitală a unei unde sinusoidale de 5 kHz obţinută de un convertor ADC de 3 biţi.
Fig. 28 - Imaginea digitală a unei unde sinusoidale de 5 kHz obţinută de un convertor ADC de 3
biţi
În fig. 29, semnalul digital nu reproduce în mod adecvat semnalul original deoarece
convertorul are prea puţine diviziuni pentru a putea reprezenta tensiunile variabile ale semnalului
analogic. Cu toate astea însă, crescând rezoluţia la 16 biţi (ceea ce duce la creşterea numărului de
diviziuni ale convertorului de la 8 = 23 la 65.536 = 2
16) va permite convertorului să obţină o
reprezentare foarte corectă a semnalului analogic. Această incertitudine inerentă în digitizarea
unei valori analogice se numeşte “eroare de cuantificare”. Eroarea de cuantificare depinde de
numărul de biţi al convertorului, alături de erorile, zgomotul şi non-linearitatea acestuia.
Fig. 29 - Eroarea de cuantificare la folosirea unui convertor ADC de 3 biţi
Fig. 30 prezintă cum ar arăta achiziţionarea unui semnal, dat fiind domeniul de intrare de
2,5V şi folosind un digitizor de 14 biţi vs. un digitizor de 8 biţi. Se poate observa acurateţea
digitizorului de 14 biţi, având în vedere că are 16.384 de nivele distincte pentru a reprezenta
semnalul de intrare, în comparaţie cu cele 256 de nivele ale unui digitizor de 8 biţi sau unui

39
osciloscop. Utilizarea unui digitizor de înaltă rezoluţie permite şi realizarea unor prelucrări
sofisticate în timp şi frecvenţă a semnalului, folosind un singur instrument. Graficul ne arată clar
avantajele folosirii unui asemenea digitizor pentru măsurători în domeniile timp si frecvenţă.
Fig. 30 - 8-biţi vs 14-biţi
Cap. VI - Tremuratul (dithering), noţiuni generale şi componente de înaltă
calitate: instrumente de diminuare a etajului de zgomot
În timpul cuantificării, în domeniul de timp, se poate păstra aproape complet informaţia
undei, făcând eşantionarea foarte repede. În domeniul de amplitudine se poate păstra o mare
parte din informaţia undei prin tremurare. Tremurarea implică adăugarea intenţionată de zgomot
la semnalul de intrare. El ajută la eliminarea micilor diferenţe din rezoluţia amplitudinii. Cheia
este să se adauge zgomot aleatoriu într-un fel care face ca semnalul să ”salte” înainte şi înapoi
între nivele succesive. Este adevărat că acest lucru face ca semnalul să fie mai zgomotos. Dar
semnalul va fi netezit prin medierea acestui zgomot în mod digital, odată ce semnalul este
achiziţionat.
Fig. 31 - Efectele tremuratului şi medierea unei unde sinusoidale de intrare

40
Notă: medierea matematică a semnalului digital fără tremurare nu elimină paşii de cuantificare.
Doar îi rotunjeşte puţin, după cum se vede în figura 31 b.
6.1 Introducere în etajul de zgomot
Etajul de zgomot al unui aparat de măsură reprezintă nivelul de zgomot măsurat cu
intrările sale conectate la masă. De obicei, este exprimat fie ca o funcţie a densităţii spectrale a
zgomotului cu unităţi de măsură de , fie ca un singur număr reprezentând zgomotul total
exprimat în Vrms. Pentru a transforma din funcţia de densitate spectrala a zgomotului în Vrms,
trebuie să se integreze funcţia densităţii spectrale a zgomotului pe lăţimea de bandă dorită. Dacă
banda de zgomot este lată, integrarea funcţiei se reduce la o simplă înmulţire, unde:
În general, zgomotul RMS al unui aparat se poate deriva din funcţia densităţii de zgomot,
dar nu se poate obţine procesul invers, respectiv obţinerea graficului densităţii spectrale de
zgomot, dintr-un singur număr. Figura 32 ilustrează curba de densitate spectrală a zgomotului
unui aparat de măsură la frecvenţă joasă. În figură sunt descrise două secţiuni. Partea înclinată
din stânga punctului, cunoscută ca colţul 1/f, se referă la zgomotul 1/f. În partea dreaptă, nivelul
de zgomot se aplatizează şi este cunoscut ca zgomot de bandă largă.
Fig. 32 - Curba densităţii spectrale a zgomotului
6.1.1 Componetele etajului de zgomot
Zgomotul în bandă largă apare neted în domeniul frecvenţă, ceea ce înseamnă că energia
este împărţită în mod egal în fiecare Hz al lungimii de bandă. Acest tip de zgomot poate să
rezulte din aproape orice componentă a aparatului de măsură, fie că ţine de calea semnalului sau
sunt folosite drept referinţă. Aceste componente sunt amplificatoare operaţionale, rezistoare,
circuite de tensiune de referinţă şi convertoare analog-digitale. Utilizarea de tehnici de post-
procesare, cum ar fi medierea, ajută la micşorarea influenţei efectelor zgomotului în bandă lată
asupra preciziei măsurătorii.
Zgomotul 1/f este totuşi mult mai complex. Este definit ca zgomot 1/f deoarece densitatea
spectrală este proporţională cu pătratul rădăcinii frecvenţei. Zgomotul 1/f mai este numit şi
„zgomot tremurat” deoarece face ca cel mai puţin important bit de la un multimetru digital DMM

41
să oscileze (”tremure”). Principalele cauze ale apariţiei acestui zgomot sunt legate de gradienţii
termici din componentele plăcii şi contaminarea din timpul procesului de fabricaţie. Aceste
cauze fac ca zgomotul 1/f să fie greu de previzionat şi controlat, iar producătorii nu specifică
corespunzător impactul zgomotului 1/f. Utilizatorii de aparate de achiziţii de date consideră acest
lucru foarte deranjant deoarece nu pot înlătura această incertitudine cu nici o operaţie post-
procesare. De exemplu, cu cât se achiziţionează de un număr mai mare de ori pentru a se media
mai mult, cu atât există şansa ca placa să devieze mai mult. În consecinţă, în funcţie de panta 1/f,
nu se va putea converge niciodată către valoarea adevărată, indiferent cât de mult se va media.
Atât cât a putut fi dovedit până acum, spectrul 1/f îşi continuă panta crescătoare către stânga,
fiind limitată doar de domeniul măsurătorii. Fabricanţii au indentificat corelaţii strânse între
nivelele de zgomot 1/f şi abaterea pe termen lung datorită temperaturii a circuitelor de tensiune
de referinţă, pe care le produc.
6.1.2 Minimizarea etajului de zgomot
National Instruments a redus zgomotul în bandă largă la aparatele de achiziţii de date,
proiectându-le cu amplificatoare de înaltă calitate, care au un CMRR înalt. Aceasta înseamnă că
aparatele resping o mare parte a zgomotului de la ambele capete ale terminalelor
amplificatorului, făcând măsurătorile mai puţin susceptibile la zgomotul de mod comun, care
poate scădea acurateţea.
National Instruments a proiectat plăci de achiziţie de date, seriile M şi S, cu plane
separate de masă în interiorul plăcii de circuit, ce se conecteză la o singură tensiune de referinţă.
În mod normal, cipurile convertoarelor analog-digital şi digital-analog sunt construite cu semnale
analogice la un capăt şi cu semnale digitale la celălalt capăt. Poziţionând cipurile convertoarelor
astfel încât să fie suprapuse peste barierele interne din placă ce separă traseele de circuit analog
şi digital, zgomotul generat în partea digitală a plăcii de achiziţie de date nu afectează partea
analogică a cipului.
Gradienţii termici din aparatul de măsură pot să inducă deseori zgomot 1/f. Pentru a evita
această problemă, National Instruments a implementat câteva soluţii pentru a asigura o deviere
cât mai mică a temperaturii la aparatele de măsură. NI foloseşte circuite de depistare a
temperaturii şi reţele adecvate de rezistori pentru a restricţiona abaterea temperaturii la 6 ppm/°C
pentru toate hardware-urile de achiziţie de date.
6.1.3 Diminuarea etajului de zgomot
În timp ce unele tipuri de zgomot rezultă din imperfecţiunile componentelor sau factorilor
de mediu, aşa cum este temperatura, şi rezoluţia plăcii poate creea zgomot. Acest fapt este
cunoscut ca eroare de cuantificare. Pentru a reduce aceste tipuri de erori, seriile E de plăci pe 12
biţi ale NI pot îmbunătăţi rezoluţia peste specificaţiile tehnice folosind o metodă harware numită
dithering (tremurare).
Driverul software al NI permite activarea tremurării prin intermediul software-ului. Când
se activează acest program, se adaugă semnalului de intrare aproximativ 0.5 LSBrms de zgomot
alb gaussian. Acest zgomot este analogic şi adăugat semnalului iniţial înainte de intrarea în
convertorul analog-digital ADC. Drept rezultat, un semnal ce poate cădea undeva în cea mai
mică diferenţă de tensiune pe care placa o poate detecta (cunoscut şi ca lăţimea codului şi definit

42
de formula codurideNr
Domeniu
. ), trece acum în mod aleatoriu deasupra şi dedesubtul limitelor acelui
cod. Când sunt eşantionate, punctele apar atât în susul cât şi în josul limitelor, iar numărul de
puncte de deasupra sau de dedesubtul lăţimii codului sunt evaluate în funcţie de locaţia
semnalului curent. Se poate folosi medierea pentru a mări peste rezoluţia specificată a plăcii,
furnizând astfel măsurători mult mai exacte şi mai puţin influenţate de zgomotul în bandă lată.
De exemplu, o placă de 12 biţi poate funcţiona cu o rezoluţie de 14 biţi, având funcţia de
tremurare activată. Pentru aplicaţii de viteză mare, care nu folosesc medierea, se poate dezactiva
funcţia de tremurare.
Fig. 33 - Diminuarea erorii cuantificate la aparate de 12 biţi folosind tremurarea
Plăcile pe 16 biţi seria E de la NI nu necesită tremurare datorită scăderii semnificative a
lăţimii codului. Totuşi se poate folosi medierea şi supra-eşantionarea pentru a diminua efectul
zgomotului în bandă lată asupra acurateţii măsurătorilor. Aceste tehnici nu reduc numai
zgomotul cauzat de componentele aparatelor de măsură dar ajută şi la reducerea zgomotului
provenit de la alte componete ale sistemului de măsurare. În plus, zgomotul 1/f la nivel de sistem
poate proveni de la senzor, aşa că ar trebui ales un senzor de înaltă calitate pentru a asigura un
etaj de zgomot cât mai scăzut pentru întregul sistem. Alte cauze ce determină apariţia zgomotului
în sistem sunt: mediul înconjurător, firele lungi, câmpul electromagnetic învecinat sau alte surse
parazite. Pentru a reduce zgomotul care vine din surse externe, trebuie împământat întregul
sistem şi folosite cabluri ecranate.
Cap. VII - Ferestruirea: optimizarea Transformatei Fourier utilizând
„funcţiile fereastră”
Ferestruirea („windowing”) este o metodă folosită la modelarea porţiunii temporale din
datele de măsurat, pentru a micşora efectele de margine cu efecte în dispersia spectrală din
spectrul FFT. Folosind corect „funcţiile fereastră” rezoluţia spectrală a rezultatelor, în domeniul
de frecvenţă, va creşte.
7.1 Trasformata Fourier Rapidă
Trasformata Fourier Rapidă (FFT) aplică o transformată Fourier la un set de frecvenţe cu
valori discrete şi plecând de la o undă în domeniul timp eşantionată la momente discrete de timp
într-un interval de timp limitat. Datorită intervalului de timp limitat, FFT tinde să nu fie sufiect
de selectivă în frecvenţă.

43
FFT se comportă de parcă ar fi o baterie de filtre bandă îngustă urmate de o baterie de
detectori corespondenţi, ce calculează suma vectorială a tuturor componentelor semnalului, care
trec prin fiecare filtru. În cazul spectrului de putere, rezultatul este scalar în loc de date
vectoriale, iar detectorul indică doar energia totală, care trece prin fiecare filtru. Datorită duratei
limitate a datelor de intrare, filtrele tind să nu mai fie prea selective. Există un fel de suprapunere
de la un interval la altul de frecvenţă, după cum se vede în fig 34.
Fig. 34 - Curba neagră arată răspunsul în frecvenţă al FFT pentru intervalul 3, albastru pentru
intervalul 4, etc. Se observă că nu există o foarte bună rejecţie/respingere între intervale
adiacente
7.2 Măsurarea pentru un interval de timp finit
Când se foloseşte FFT pentru a măsura conţinutul în frecvenţă al datelor, analiza trebuie
să pornească de la un set determinat de date. FFT presupune că setul determinat de date este o
perioadă a unui semnal periodic. Pentru FFT atât domeniul de timp cât şi domeniul de frecvenţă
sunt topologii circulare, astfel că cele două puncte de final ale undei de timp sunt interpretate ca
şi când ar fi conectate împreună. De aceea, limitarea înregistrării eşantionării poate rezulta într-o
undă trunchiată cu caracteristici spectrale diferite de cele ale semnalului original continuu, iar
această limitare poate aduce schimbări bruşte în datele măsurate. Tranziţiile bruşte sunt
discontinuităţile ce apar la ”copierea” undei înainte şi după unda achiziţionată, pentru a putea fi
aplicată FFT. Pentru a micşora acest efect, se poate aplica funcţia fereastră asupra semnalului
măsurat în domeniul de timp. Ca rezultat, punctele de final ale undei se vor întâlni şi astfel, la
”copierea” ei, se va obţine o undă continuă fără tranziţii bruşte.
7.2.1 Număr întreg de perioade
Când semnalul este periodic şi un număr întreg de perioade umple intervalul de timp de
achiziţie, FFT se calculează foarte precis.

44
Fig. 35 - Măsurarea unui număr întreg de perioade duce la un FFT ideal
7.2.2 Număr de perioade ne-întreg
Când numărul de perioade din achiziţie nu este un întreg, punctele de sfârşit sunt
discontinue. Rezultatul este apariţia unor componente spectrale false de-o parte şi de alta a
componentei corecte (lobi laterali), cu amplitudine în scădere pe măsură ce ne depărtăm de
frecvenţa corectă. Acest fenomen se numeşte „dispersie spectrală”.
Fig. 36 - Măsurarea unui număr ne-întreg de perioade adaugă dispersie spectrală la FFT
7.3 Ferestruirea unui număr ne-întreg de perioade
Aplicând o funcţie fereastră unei achiziţii, ce duce la conectarea punctelor de sfârşit ale
undei într-un mod lin înainte de a calcula FFT, vom avea ca rezultat o rezoluţie spectrală mai
bună. Această metodă se numeşte şi „aplicarea unei ferestre” sau, mai simplu, ferestruire.

45
Fig. 37 - Aplicarea unei ferestre minimizează efectul de dispersie spectrală
7.4 Tipuri comune de ferestruire
Sunt mai multe tipuri de funcţii fereastră disponibile, fiecare având propriile avantaje şi
aplicaţii preferate. Pentru a vedea diferenţele între aceste funcţii se va lua în considerare un
exemplu.
Exemplu de fereastră:
Aplicarea unei funcţii fereastră „4-term Blackman-Harris” înainte de FFT reduce mult
lobii laterali, deşi lăţimea de bandă de -3 dB a lobului principal a crescut de la 1 interval la 2
intervale (fig. 38). Lăţimea de bandă în plus reprezintă un dezavantaj, mai mic decât avantajul
dobândit prin reducerea lobilor.
Fig. 38 - O funcţie fereastră de tip 4-term Blackman-Harris reduce lobii laterali din domeniul de
frecvenţă

46
Figura 39 arată graficul în domeniul timp al unor ferestre comune. Majoritatea ferestrelor
încep şi se termină la zero şi ating valoare unitară în mijloc. Cele mai înguste ferestre din
domeniul de timp au lobul principal cel mai lat în domeniul de frecvenţă şi invers.
Fig. 39 - Graficul domeniului de timp ale unor ferestre comune
Datorită lobilor laterali înalţi, folosirea unei FFT cu o funcţie fereastră rectangulară (sau
nici o funcţie fereastră) nu este, de obicei, recomandată.
Funcţia fereastră Hann (denumită şi Hanning) este utilizată pentru măsurătorile de
zgomot, unde se doreşte o rezoluţie mai bună a frecvenţei decât în cazul altor ferestre, iar
lobii laterali moderaţi nu reprezintă o problemă.
Funcţia fereastă 4-term Blackman-Harris este bună, în general, având rejecţia lobului
lateral mai bună de 90 dB şi lobul principal moderat ca lăţime.
Funcţia fereastră 7-term Blackman-Harris are toate domeniile dinamice necesare dar are
lobul principal de lăţime mare.
Funcţia fereastră Kaiser-Bessel are un parametru variabil, beta, care schimbă lobii
laterali cu lobul principal. Seamănă oarecum cu funcţia fereastră Blackman-Harris, dar
pentru aceeaşi lăţime a lobului principal, lobii următori tind să fie mai înalţi, iar ceilalţi
din lateral sunt mai scăzuţi.
Pe măsură ce calculatoarele au devenit foarte rapide şi cu mai multă memorie, mărimea
unei FFT acceptabile creşte în consecinţă. Chiar şi în anii 2000, FFT mari puteau fi calculate
suficient de repede încât funcţia fereastră 7-term Blackman-Harris furniza o rezoluţie a
frecvenţei destul de bună şi un domeniu dinamic foarte bun.

47
Fig. 40 - Răspunsul în domeniul de frecvenţă ale ferestrelor din figura precedentă
Alegerea unei funcţii fereastră nu este simplă. Fiecare funcţie are propriile caracteristici şi
sunt adecvate pentru diverse aplicaţii. Pentru a alege o funcţie fereastră trebuie estimat conţinutul
în frecvenţă al semnalului.
Dacă semnalul conţine componente de interferenţă puternice cu frecvenţe depărtate de
frecvenţa de interes, se alege o funcţie de ferestruire cu descreştere rapidă a lobilor laterali.
Dacă semnalul conţine componente de interferenţă puternice cu frecvenţe în apropierea
frecvenţei de interes, se alege o funcţie fereastră cu un nivel scăzut al lobului lateral
maxim.
Dacă frecvenţa de interes are 2 sau mai multe semnale foarte aproape unul de celelălalt,
rezoluţia spectrală are mare importanţă. În acest caz se alege o funcţie fereastră cu lobul
principal foarte îngust.
Dacă acurateţea amplitudinii unei singure componente a frecvenţei este mai importantă
decât locaţia exactă a componentei într-un interval dat de frecvenţă, se alege o funcţie
fereastră cu lobul principal lat.
Dacă spectrul semnalului este mai mult plat, se alege o fereastră uniformă sau nu se
foloseşte nici o funcţie fereastră.
În general, fereastra Hanning este satisfăcătoare în 95% din cazuri. Are o rezoluţie bună în
frecvenţă şi reduce dispersia spectrală. Dacă nu se cunoaşte natura semnalului dar se
doreşte aplicarea unei funcţii fereastră, este de dorit să se înceapă cu fereastra Hanning.
Recomandări pentru diferite tipuri de ferestre
Tipul Semnalului Fereastra
Trecător, durata semnalului este mai mică decât lungimea
ferestrei Rectangular
Trecător, durata semnalului este mai mare decât lungimea
ferestrei Exponenţial, Hanning
Aplicaţii cu scop general Hanning

48
Analiză spectrală
Hanning (pentru excitaţie
aleatoare), Rectangular (pentru
excitaţie pseudo-aleatoare)
Semnale cu frecvenţe foarte apropiate dar cu amplitudini
diferite Kaiser-Bessel
Semnale cu frecvenţe foarte apropiate dar cu amplitudini
apropiate Rectangular
Măsurători de amplitudine a unui semnal cu o singură
frecvenţă (ton) Flat top
Sinusoida sau combinaţie de sinusoide Hanning
Sinusoida şi acurateţea amplitudinii este importantă Flat top
Semnal aleator de bandă îngustă (date de vibraţii) Hanning
Semnal aleator de bandă largă (zgomot alb) Uniform
Unde sinusiodale apropiate spaţial Uniform, Hamming
Semnale de excitaţie de tip impuls (lovitură de ciocan) Force
Semnale de răspuns la excitaţie tip impuls Exponential
Semnale necunoscute Hanning
7.5 Ferestruirea în LabVIEW
În software-ul de dezvoltare grafică din LabVIEW ferestrele sunt valabile în câteva
funcţii ale meniurilor ce operează asupra reprezentării în frecvenţă. De exemplu, Spectral
Measurements Express VI (fig. 41) permite alegerea dintre 9 tipuri de ferestre diferite pentru
măsurătorile spectrale.
Fig. 41 - Alegerea unei funcţii fereastră în Labview Spectral Measurements Express VI

49
Multe alte aplicaţii ale LabVIEW includ opţiunea de selectare a tipului de fereastră. Se
pot personaliza aplicaţiile folosind chiar şi meniul Windows, care are o gamă întreagă de funcţii
fereastră (fig. 42).
Fig. 42 - Funcţii Fereastră din Windows în LabVIEW
Cap. VIII - Cablarea şi consideraţii de zgomot privind semnalele digitale
8.1 Tipuri de surse de semnal şi sisteme de măsurare
Cea mai cunoscută mărime electrică produsă de un circuit de condiţionare a semnalului
asociat cu senzorii este, de departe, tensiunea electrică (in document, denumită, pe scurt,
„tensiunea”). Transformarea mărimii măsurate în alte mărimi electrice, cum sunt curentul şi
frecvenţa, se poate întâlni acolo unde semnalul trebuie transmis prin cabluri lungi în condiţii de
mediu dure. Cum în toate cazurile, înainte de a fi măsurat, semnalul transformat este, în final,
convertit înapoi sub forma tensiunii, este foarte important de înţeles sursa semnalului de
tensiune.
Se ştie că un semnal de tensiune este măsurat ca diferenţă de potenţial între două puncte,
după cum se vede în figura 43.
Fig. 43 - Sursa semnalului de tensiune şi modelul sistemului de măsurare

50
O sursă de tensiune poate fi împărţită în două categorii: împământată şi neîmpământată.
În mod similar, un sistem de măsurare poate fi grupat tot în două categorii: împământat şi
neîmpământat.
8.1.1 Sursă de semnal împământată sau legată la pământ
O astfel de sursă este aceea în care semnalul de tensiune este legat de sistemul de
împământare al clădirii. Figura 44 arată o sursă de semnal împământată.
Fig. 44 - Sursă de semnal împământată
Pământul a două surse de semnal împământate nu este la acelaşi potenţial. Diferenţa de
potenţial electric dintre două instrumente conectate la acelaşi sistem de alimentare electrică al
clădirii este, de obicei, de ordinul a 10 mV până la 200 mV; totuşi, diferenţa poate fi şi mai mare
dacă circuitele de distribuţie a puterii electrice nu sunt corect conectate.
8.1.2 Sursă de semnal neîmpământată sau fără legătură
O sursă liberă este aceea în care semnalul de tensiune nu este legat de o referinţă
absolută, aşa cum este pământul sau clădirea. Exemple obişnuite de surse de semnal libere sunt
bateriile, sursa semnalului de putere a bateriei, termocuplurile, transformatoarele,
amplificatoarele de izolaţie şi alte instrumente care lasă liber semnalul de ieşire. O astfel de sursă
de semnal se vede în figura de mai jos.
Fig. 45 - Sursă de semnal liberă
8.1.3 Sistem de măsurare diferenţial sau nelegat
Un sistem de măsurare diferenţial sau neîmpământat nu are nici una din intrări legate de o
referinţă fixă, cum este pământul. Instrumentele ţinute în mână, bateriile şi dispozitivele de
achiziţie de date cu amplificatori sunt exemple de sisteme de măsurare diferenţiale. În figura 46

51
se observă implementarea unui sistem de măsurare diferenţial cu 8 canale folosit la un aparat
obişnuit al NI. Multiplexorii analogici se utilizează în calea semnalului pentru a creşte numărul
de canale de măsurare, în timp ce se foloseşte un singur amplificator. Pentru acest dispozitiv,
pinul denumit AI GND (intrare analogică împământată) este pământul sistemului de măsurare.
Fig. 46 - Sistem de măsurare diferenţial cu 8 canale
Un sistem ideal de măsurare diferenţial răspunde numai la diferenţa potenţială dintre cele
două terminale ale sale – intrările (+) şi (-). Orice tensiune măsurată ţinând cont de pământul
amplificatorului, prezentă la ambele intrări ale amplificatorului, se numeşte tensiune de mod
comun. Tensiunea de mod comun este respinsă complet (nu e măsurată) de un sistem ideal de
măsurare diferenţial. Această capacitate este utilă la respingerea zgomotului. Un zgomot nedorit
este deseori introdus în circuit, la măsurarea în medii industriale, creând în sistemul de cablare o
tensiune de mod comun. Dispozitivele practice au câteva limitări, descrise de parametrii, cum
sunt domeniu de tensiune de mod comun şi rata respingerii de mod comun (CMMR), care
limitează abilitatea de a elimina tensiunea de mod comun.
Tensiunea de mod comun Vcm se defineşte astfel:
unde:
V+ este tensiunea la terminalul neinversat al sistemului de măsurare
V– este tensiunea la terminalul inversat al sistemului de măsurare
CMMR este definită după cum urmează (în decibeli):
CMMR (dB) = 20log (amplificare diferenţială/amplificare în mod comun)
Figura 47 arată un circuit simplu care ilustrează CMMR. În acest circuit, CMMR se
măsoară ca 20log Vcm/Vout, în care V+ = V
- = Vcm

52
Vcm
Fig. 47 - Circuit de măsurare CMMR
Domeniul de tensiune de mod comun limitează oscilaţia tensiunii la fiecare intrare legată
de pământul sistemului de măsurare. Încălcarea acestei constrângeri duce nu numai la erori în
măsurare, ci şi la posibile deteriorări ale componentelor dispozitivului. Aşa cum sugerează şi
termenul în sine, CMMR măsoară capacitatea unui sistem de măsurare diferenţial de a elimina
semnalul de tensiune de mod comun. CMMR este o funcţie ce depinde de frecvenţă şi scade
odată cu aceasta. CMMR poate fi optimizat prin folosirea unui circuit balansat. Marea majoritate
a dispozitivelor de achiziţie de date vor specifica valoarea CMMR până la 60Hz.
8.1.4 Sistem de măsurare împământat sau legat de pământ
Un astfel de sistem este similar cu o sursă împământată prin aceea că măsurarea se face
ţinând cont de pământ. Figura 48 arată un sistem de măsurare împământat cu 8 canale. Se mai
numeşte şi sistem de măsurare cu o singură intrare.
Fig. 48 - Sistem de măsurare împământat cu 8 canale
O variantă a tehnicii de măsurare cu o singură ieşire se regăseşte deseori la dispozitivele
de achiziţie de date. Fig. 49 prezintă un astfel de sistem, arătând că un sistem de măsurare cu un
singur canal este acelaşi cu un sistem de măsurare diferenţial cu un singur canal.

53
Fig. 49 -
La un asemenea sistem, toate măsurătorile sunt făcute în funcţie de AI SENSE (sensul de
intrare analogică uni-nod), dar potenţialul acestui nod poate varia ţinând cont de pământul
sistemului de măsurare.
8.1.5 Măsurarea surselor de semnal împământate
O sursă de semnal împământată se măsoară cel mai bine cu un sistem de măsurare
diferenţial sau nelegat. În figura 50 se vede modul de utilizare a unui sistem de măsurare
împământat pentru măsurarea unei surse de semnal împământat. În acest caz, tensiunea măsurată
Vm reprezintă suma tensiunii semnalului Vs şi diferenţa potenţială ΔVg care există între pământul
sursei de semnal şi pământul sistemului de măsurare. Rezultatul este un sistem de măsurare
zgomotos, care arată deseori la citire componente ale frecvenţei semnalului de alimentare.
Diferenţa de potenţial dintre cele două pământuri face să circule curentul la interconexiuni. Acest
curent se numeşte curent de buclă de pământ.
Fig. 50 - O sursă de semnal împământată măsurată cu un sistem împământat ce introduce buclă
de pământ
Un sistem împământat poate fi folosit şi dacă nivelele semnalului de tensiune sunt mari,
iar reţeaua de interconectare dintre sursă şi aparatul de măsură are impedanţa scăzută. În acest
caz, măsurarea semnalului de tensiune este degradată de către bucla de pământ, însă degradarea

54
poate fi acceptabilă. Polaritatea unei surse de semnal împământate trebuie observată cu foarte
multă atenţie înainte de a face conectarea la sistemul de măsurare deoarece sursa de semnal poate
fi pusă în scurt-circuit la pământ, ducând astfel la deteriorarea sa.
O măsurătoare „nelegată” este furnizată atât de o configuraţie diferenţială, cât şi de una
cu o singură ieşire, folosind un instrument standard de achiziţie de date. Cu oricare din cele două
configuraţii, orice diferenţă potenţială dintre referinţele sursei şi ale dispozitivului de măsurat vor
apărea sub formă de tensiune de mod comun pentru sistemul de măsurare şi va fi scăzută din
semnalul măsurat. Această situaţie este ilustrată în figura 51.
Fig. 51 - Un sistem de măsurare diferenţial folosit la măsurarea unei surse de semnal
împământate
8.1.6 Măsurarea surselor de semnal libere (neîmpământate)
Sursele de semnal libere pot fi măsurate şi cu un sistem de măsurare diferenţial, dar şi cu
unul cu o singură ieşire. În cazul sistemului de măsurare diferenţial totuşi, trebuie avut grijă ca
nivelul tensiunii de mod comun să rămână în domeniul de intrare de mod comun al aparatului de
măsură.
O varietate de fenomene, cum ar fi curenţii de intrare ai amplificatorului, pot muta nivelul
de tensiune de mod comun al sursei libere în afara domeniul valabil de intrare al unui dispozitiv
de achiziţie de date. Pentru a fixa acest nivel la o anumită referinţă, se folosesc rezistori, aşa cum
se vede în figura 52. Aceşti rezistori, numiţi rezistori direcţionaţi (bias resistors), furnizează o
cale de curent continuu de la intrările amplificatorului la pământul său. Rezistorii ar trebui să fie
de o valoare suficient de mare pentru a permite sursei să fie liberă faţă de referinţa de măsurare şi
să nu încarce sursa de semnal dar, în acelaşi timp, suficient de mică pentru a menţine tensiunea
de mod comun în domeniul de intrare al dispozitivului. Valori între 10 kΩ şi 100 kΩ merg foarte
bine cu surse cu impedanţă mică, cum sunt termocuplurile şi ieşirile modulului uzual de
condiţionare a semnalului.

55
Fig. 52 - Sursă liberă şi configuraţie de intrare diferenţială
Dacă semnalul de intrare provine de la o sursă de curent continuu (traductoare cu ieşire în
curent), este necesar ca numai unul dintre rezistori să fie conectat de la intrarea (-) la pământul
sistemului de măsurare este necesar. Însă acest lucru duce la un sistem dezechilibrat dacă
impedanţa sursei este relativ mare. Sistemele echilibrate sunt preferate din punctul de vedere al
imunităţii la zgomot. În consecinţă, ar trebui folosiţi doi rezistori de valoare egală, unul pentru
intrarea de semnal (+) mare şi celălalt pentru intrare de semnal (-) mică, în cazul în care
impedanţa sursei este mare. Un singur ”bias”resistor este suficient pentru surse de curent
continuu cu impedanţă scăzută, aşa cum sunt termocuplurile.
Dacă semnalul de intrare este cuplat la curent alternativ, sunt necesari doi ”bias” rezistori,
care să satisfacă cerinţa direcţiei de curent a amplificatorului. Rezistorii furnizează o direcţie de
întoarcere la pământ pentru curenţii de intrare ai amplificatorului, aşa cum se vede şi în figura de
mai sus. Numai R2 este necesar unei surse de semnal cuplată la curent continuu. Pentru sursele
cuplate la curent alternativ, R1 = R2.
Dacă se foloseşte modul de intrare cu o singură ieşire, pentru sursa de semnal liberă poate
fi folosit un sistem de măsurare împământat cu o singură intrare (figura 53a). Sistemul de
măsurare neîmpământat cu o singură intrare poate fi şi el folosit (figura 53b) şi este de preferat
din punctul de vedere al eliminării zgomotului. În această configuraţie, sursa liberă are nevoie de
rezistori direcţionaţi între intrarea AI SENSE şi pământul sistemului de măsurare AI GND.

56
Figura b)
Fig. 53 -
În tabelul următor se prezintă un sumar al discuţiei de până acum.
În general, se preferă un sistem de măsurare diferenţial deoarece acesta respinge nu
numai erorile induse de bucla de pământ, ci şi zgomotul apărut în mediul înconjurător până la un

57
anumit grad. Configuraţiile cu o singură ieşire, pe de altă parte, furnizează de două ori mai multe
canale de măsurare dar se justifică numai dacă importanţa erorilor induse este mai mică decât
acurateţea necesară a datelor. Conexiunile cu o singură ieşire pot fi folosite atunci când toate
semnalele de intrare îndeplinesc anumite criterii, şi anume:
- semnalele de intrare sunt mari (mai mari de 1V);
- cablurile sunt scurte şi traversează un mediu fără zgomot sau sunt corect ecranate;
- toate semnalele de intrare pot să împartă un semnal de referinţă comun la sursă.
Atunci când criteriile de mai sus sunt încălcate, se poate folosi conexiune diferenţială.
8.2 Minimizarea zgomotului de cuplare la interconexiuni
Chiar şi atunci când organizarea măsurătorii evită buclele de pământ sau saturaţia
intrărilor analogice prin urmărirea criteriilor menţionate mai sus, semnalul măsurat va include
inevitabil o cantitate de zgomot sau semnal nedorit preluat din mediul înconjurător. Acest lucru
este valabil îndeosebi pentru semnalele analogice de nivel scăzut, care sunt amplificate folosind
amplificatorul plăcii, existent la multe dintre dispozitivele de achiziţii de date. Pentru a înrăutăţi
lucrurile şi mai mult, plăcile de achiziţii de date ale calculatoarelor au, în general, nişte semnale
digitale de intrare/ieşire de la conectorii de intrare/ieşire. În consecinţă, orice activitate a acestor
semnale digitale furnizată de către sau către plăcile de achiziţie de date, care se deplasează în
cablul de interconectare pe o anumită lungime foarte aproape de semnalele analogice de nivel
scăzut în cablul de interconectare, pot constitui sursă de zgomot în semnalul amplificat. Pentru a
minimiza zgomotul de cuplare de la aceste surse, sunt necesare cablarea şi ecranarea corectă.
Înainte de a înţelege cum se cablează şi ecranează corect, trebuie înţeleasă natura
problemei interferenţei sau a zgomotului de cuplare. Nu există o soluţie unică la această
problemă. Iar o soluţie incorectă poate agrava şi mai mult situaţia. În figura 54 se prezintă
problema interferenţei sau a zgomotului de cuplare.
Fig. 54 - Diagrama-bloc a problemei zgomotului de cuplare
Aşa cum se observă, există patru “preluări” principale de zgomot sau mecanisme de
cuplare: conductivă, capacitivă, inductivă şi radiativă. Cuplarea conductivă rezultă din
distribuirea curenţilor din diverse circuite într-o impedanţă comună. Cuplarea capacitivă rezultă
din variaţia în timp a câmpurilor electrice din vecinătatea zonei de semnal. Zgomotul inductiv
sau cuplat magnetic rezultă din variaţia în timp a câmpurilor magnetice din zona inclusă în
circuitul semnalului. Dacă sursa câmpului electromagnetic este departe de circuitul semnalului,

58
cuplarea electrică şi cea magnetică sunt considerate combinate - cuplare electromagnetică sau
radiativă.
Zgomot cuplat conductiv – acest zgomot există deoarece conductorii au o impedanţă
limitată. Atunci când se proiectează o schemă conductoare, trebuie ţinut cont de efectul acestor
impedanţe. Cuplarea conductivă poate fi eliminată sau minimizată prin înteruperea buclelor de
pământ (dacă există) şi furnizarea de căi de întoarcere separate pentru ambele semnale de putere
– de nivel înalt şi de nivel scăzut. Figura 55a) arată o schemă de conectare la pământ în serie,
unde rezultă cuplarea conductivă.
Dacă rezistenţa firului de întoarcere comun de la A la B este de 0,1 Ω, tensiunea măsurată
de la senzorul de temperatură va varia cu 0,1 Ω*1A = 100 mV, depinzând de întrerupător – dacă
este deschis sau închis. Aceasta se traduce printr-o eroare de 10 la măsurarea temperaturii.
Circuitul din figura 55b) furnizează căi de întoarcere separate; astfel, ieşirea senzorului de
temperatură măsurată nu variază pe măsură ce curentul din circuit este închis sau deschis.
Fig. 55 –

59
Cuplarea capacitivă şi inductivă – instrumentul analitic necesar pentru descrierea
interacţiunii dintre câmpurile electric şi magnetic al zgomotului şi circuitele semnalului este
ecuaţia matematică a lui Maxwell. Pentru înţelegerea intuitivă şi calitativă a acestor canale de
cuplare, pot fi folosiţi echivalenţi de circuit. Fig. 56 şi 57 arată echivalentul unui circuit pentru
cuplarea câmpului electric şi magnetic.
Fig. 56 - Cuplare capacitivă între sursa de zgomot Fig. 57 - Cuplare inductivă între sursa de zgomot şi
şi circuitul semnalului, modelat de capacitanţa circuitul semnalului, modelat de inductanţa
Cef din circuitul echivalent mutuală M din circuitul echivalent
a) Cuplarea capacitivă – în acest caz, poate fi văzută utilitatea unui circuit echivalent al
canalelor de cuplare. Cuplarea unui câmp electric este modelată ca o capacitanţă între cele două
circuite. Capacitanţa echivalentă Cef este direct proporţională cu aria de suprapunere şi invers
proporţională cu distanţa dintre cele două circuite. Astfel, crescând separarea sau micşorând
suprapunerea, se va micşora şi Cef respectiv, şi cuplarea capacitivă. Pot fi derivate şi alte
caracteristici ale cuplării capacitive pornind de la acest model. De exemplu, nivelul cuplării
capacitive este direct proporţional cu frecvenţa şi amplitudinea sursei de zgomot şi cu impedanţa
circuitului receptor. Astfel, cuplarea capacitivă poate fi redusă prin reducerea tensiunii sau
frecvenţei sursei de zgomot ori prin reducerea impedanţei circuitului semnalului. Capacitanţa
echivalentă poate fi şi ea redusă prin folosirea unei ecranări capacitive. Aceasta funcţionează prin
ocolirea sau furnizarea unei noi căi pentru curentul indus, astfel că nu este transportat în circuitul
semnalului. O ecranare capacitivă corectă necesită atenţie atât privitor la locul ecranării, cât şi la
conexiunea ei. Ecranul trebuie să fie pus între conductorii de cuplare capacitivi şi conectat la
pământ, numai la finalul sursei. O cantitate importantă de curenţi vor fi induşi în ecran, dacă
există împământare la ambele capete. Datorită curentului produs de diferenţa de potenţial de
masă/pământ De exemplu, o diferenţă potenţială de 1V între pământuri poate forţa un curent de
2A în ecran, dacă are o rezistenţă de 0,5Ω. Ca regulă generală, metalul sau materialul conductor

60
din vecinătatea căii semnalului nu ar trebui lăsat liber deoarece zgomotul de cuplare capacitivă
poate creşte.
Fig.58 -Terminaţie incorectă a ecranării – curenţii sunt induşi în ecran
Fig.59 -Terminaţie corectă a ecranării – nici un curent nu circulă prin ecran
b) Cuplarea inductivă – aşa cum a fost descrisă mai devreme, cuplarea inductivă rezultă din
variaţia în timp a câmpurilor magnetice în zona inclusă în bucla circuitului semnalului. Aceste
câmpuri magnetice sunt generate de curenţi din apropierea circuitului de zgomot. Tensiunea
indusă Vn din circuitul semnalului este dată de formula:
(1)
unde f este frecvenţa densităţii de flux variabil sinusoidal
B este valoarea rms a densităţii fluxului
A este aria buclei circuitului de semnal
Æ este unghiul dintre densitatea fluxului B şi aria A
Modelul de circuit echivalent al cuplării inductive este inductanţa M din figura 59. În
termeni de inductanţă mutuală M, tensiunea indusă este dată de formula:
(2)

61
unde In este valoarea rms a curentului sinusoidal din circuitul de zgomot
f este frecvenţa sa
Deoarece M este direct proporţional cu aria buclei circuitului receptor şi invers
proporţional cu distanţa dintre circuitul sursei de zgomot şi circuitul semnalului, creşterea
separaţiei sau reducerea ariei buclei de semnal va duce la scăderea cuplării inductive dintre cele
două circuite. Reducând curentul In din circuitul de zgomot sau frecvenţa sa, va avea ca efect tot
scăderea cuplării inductive. Densitatea fluxului B din circuitul de zgomot poate fi şi ea redusă
prin răsucirea firelor sursei de zgomot. În final, se poate aplica o ecranare magnetică fie sursei de
zgomot, fie circuitului semnalului, pentru a minimiza cuplarea.
Ecranarea împotriva câmpurilor magnetice de frecvenţă joasă nu este aşa de uşoară ca cea
împotriva câmpurilor electrice. Eficacitatea ecranării magnetice depinde de tipul de material –
permeabilitatea sa, grosimea sa, şi de frecvenţele implicate. Datorită unei permeabilităţi relativ
mari, oţelul este mult mai eficient decât aluminiul sau cuprul pentru a fi folosit ca ecran pentru
câmpuri magnetice de frecvenţă joasă (sub 100kHz). La frecvenţe mari, totuşi, aluminiul şi
cuprul pot fi folosite cu succes. În figura 60 se observă pierderea absorbţiei la cupru şi oţel
pentru două grosimi diferite ale benzii metalice. Proprietăţile de ecranare magnetică ale acestor
metale sunt ineficiente la frecvenţe reduse, cum sunt cele ale liniilor de putere (50 până la 60Hz),
care sunt principalele surse de frecvenţă redusă în mai toate mediile. Se pot găsi ecrane
magnetice mai bune pentru ecranarea la frecvenţe reduse, cum este mu-metalul, dar acesta este
foarte fragil la şocuri mecanice şi poate suferi o degradare severă a permeabilităţii sale, ceea ce
duce la degradarea eficacităţii ca ecran magnetic.
Fig. 60 -Pierderea absorbţiei ca funcţie de frecvenţă
Datorită lipsei controlului asupra parametrilor circuitului de zgomot şi dificultăţii relative
de a realiza ecranarea magnetică, reducerea ariei buclei în circuitul de semnal este o metodă
eficientă de minimizare a cuplării inductive. Cablarea în perechi răsucite este benefică fiindcă
reduce atât aria buclei în circuitul de semnal dar anulează şi erorile induse.

62
Formula (2) determină efectul transportării curenţilor buclei de pământ în ecran.
Dacă In = 2A; f = 60Hz; M = 1µH/ft pentru 10ft de cablu, rezultă următoarele:
Nivelul de zgomot se transferă în 3,1 LSB pentru un domeniu de 10V şi un sistem de
achiziţie de date pe 12 biţi. Eficacitatea sistemului de achiziţie de date este astfel redusă la cea a
unuia pe 10 biţi.
Când se foloseşte un dispozitiv din seria E, cu un cablu ecranat şi achiziţie în mod
diferenţial, aria buclei din circuitul de semnal este redusă deoarece fiecare pereche de semnale
este configurată ca o pereche răsucită. Acest lucru nu mai este valabil la modul de achizitie cu o
singură ieşire fiindcă ariile buclei de diverse mărimi se pot forma cu canale diferite.
Sursele actuale de curent sunt mai imune la acest tip de zgomot decât sursele de semnal
cu ieşire în tensiune pentru că tensiunea indusă magnetic apare în serie cu sursa, aşa cum se vede
şi în fig. 61. V21 şi V22 sunt surse de zgomot cuplate inductive, iar Vc este o sursă de zgomot
cuplată capacitiv.
Fig. 61 -Model de circuit pentru cuplarea inductivă şi capacitivă
Atât nivelul cuplării inductive, cât şi cel al cuplării capacitive depind de amplitudinea
zgomotului şi de apropierea sursei de zgomot şi a circuitului de semnal. Astfel, creşterea
separaţiei între circuitele interferente şi reducerea amplitudinii sursei de zgomot sunt foarte bune.
Cuplarea conductivă rezultă din contactul direct, deci nu este utilă creşterea separaţiei fizice din
circuitul de zgomot.

63
c) Cuplarea radiativă – această cuplare de la surse de radiaţie, cum sunt staţiile radio şi TV
şi canalele de comunicaţie, nu sunt considerate în mod normal surse de interferenţă pentru
sistemele de măsură cu lăţimea benzii de frecvenţă redusă (mai puţin de 100kHz). Însă zgomotul
de frecvenţă înaltă poate fi corectat şi introdus în circuitele de frecvenţă redusă printr-un proces
numit “rectificare audio”. Acest proces rezultă din legătura neliniară în IC, ce acţionează ca
rectificatori.
Omniprezentul terminal de calculator este o sursă de interferenţă a câmpurilor electric şi
magnetic în vecinătatea circuitelor. Figura 62 arată graficele datelor obţinute cu un dispozitiv de
achiziţie de date, folosind o amplificare de 500 cu ajutorul unui amplificator programabil al
plăcii. Semnalul de intrare este un scurt-circuit la blocul final de conexiuni (conectorul de
intrare/ieşire). Între blocul terminal şi conectorul de intrare/ieşire s-a folosit un cablu ne-ecranat
de interconectare de 0,5m. Pentru conexiunea de semnal diferenţială, intrările canalului înalt şi
ale canalului jos au fost legate împreună şi apoi, conectate la pământul sistemului analogic. La
conexiunea cu o singură ieşire, intrarea canalului a fost direct legată la pământul sistemului
analogic.
Fig. 62 -Imunitatea la zgomot a configuraţiei de intrare diferenţială comparativ cu cea cu o
singură ieşire
d) Diverse alte surse de zgomot – atunci când este implicată mişcarea unui cablu de
interconectare, aşa cum se întâmplă într-un mediu vibraţional, trebuie avut grijă la efectul
triboelectric, precum şi la tensiunea indusă datorată schimbării fluxului magnetic prin bucla
circuitului de semnal. Efectul triboelectric este cauzat de sarcina electrică generată în învelişul
cablului, dacă nu se menţine contactul cu conductorii cablului. Schimbarea fluxului magnetic
rezultă din schimbarea ariei buclei circuitului de semnal, cauzată de mişcarea unuia sau ambilor
conductori – încă o demonstraţie a cuplării inductive. Soluţia este să se evite cablurile
independente şi să se fixeze aceste cabluri.

64
În circuitele de măsurare folosite pentru măsurarea unor semnale de nivel scăzut, trebuie
avut grijă la încă o sursă de eroare în măsurători – termocuplurile formate din neatenţie de-a
lungul legăturilor diverselor metale. Erorile cauzate de efectul termocuplurilor nu constituie erori
tip interferenţă dar merită să fie menţionate deoarece pot fi cauza unor influenţe greu de
interpretat între canale la măsurătorile semnalelor de nivel redus.
8.3 Sisteme echilibrate
În descrierea sistemelor de măsurare diferenţiale, s-a menţionat că CMRR este optimizat
într-un circuit echilibrat. Un astfel de circuit trebuie să îndeplinească următoarele trei criterii:
- sursa este echilibrată – ambele terminale ale sursei (semnalul de tensiune înaltă şi
semnalul comun) au impedanţă egală la pământ;
- cablul este echilibrat – ambii conductori au impedanţa egală la pământ;
- receptorul este echilibrat – ambele terminale ale circuitului final din lanţul de
măsurare au impedanţa la pământ egală.
Într-un circuit echilibrat, cuplarea capacitivă este minimizată deoarece tensiunea indusă
de zgomot este aceeaşi la ambii conductori datorită impedanţei lor egale.
Fig. 63 -Model de circuit pentru cuplarea zgomotului capacitiv
Dacă modelul de circuit din figura 63 reprezintă un sistem echilibrat, ar trebui să se aplice
următoarele condiţii:
O analiză simplă a circuitului arată că, în caz de echilibru, adică V+ = V
–, tensiunea
cuplată capacitiv Vc apare ca un semnal de mod comun. În caz de dezechilibru, şi anume fie
Z1≠Z2, fie Zc1≠Zc2, tensiunea cuplată capacitiv Vc apare ca o tensiune diferenţială, adică V+≠V
–,
care nu poate fi respinsă de către amplificator. Cu cât dezechilibrul este mai mare în sistem sau
impedanţele nu se potrivesc, cu atât va fi mai mare componenta diferenţială a zgomotului cuplat
capacitiv.
O conexiune diferenţială (neechilibrată) prezintă un receptor echilibrat de partea
dispozitivului de achiziţie de date dar circuitul nu este echilibrat dacă sursa sau cablurile nu sunt
echilibrate. Acest lucru este ilustrat in figura 64. Dispozitivul de achiziţie de date este configurat
pentru modul de intrare diferenţial la o amplificare de 500. Impedanţa sursei Rs este aceeaşi în
ambele cazuri (1 kΩ). Rezistorii diferenţiali folosiţi în circuitul din figura b) sunt amândoi de
100 kΩ. Respingerea de mod comun este mai bună pentru circuitul din figura b) decât din figura
a). Figurile c şi d sunt grafice ale semnalului reprezentat în domeniul timp pentru datele obţinute
de la configuraţiile a şi b. De notat absenţa componentelor parazite dependente de frecvenţă

65
(zgomot) în configuraţia sursei echilibrate. Sursa de zgomot din acest caz este monitorul
calculatorului. În cazul circuitelor echilibrate se încarcă sursa semnalului cu o sarcină rezistivă:
Acest efect de încărcare nu trebuie ignorat. Cazul de dezechilibru nu duce la încărcarea
sursei semnalului. În cazul figurii a, dezechilibrul din sistem (nepotrivirea impedanţelor de la
conductorii de semnal înalt şi scăzut) este proporţional cu impedanţa sursei Rs. În cazul limitat
când Rs = 0 Ω, cazul din figura a este tot în echilibru şi astfel, mai puţin sensibil la zgomot.
Fig. 64 -Organizarea sursei şi datele obţinute
8.4 Caracteristicile impedanţei sursei
Deoarece impedanţa sursei este importantă în determinarea imunităţii de zgomot
capacitiv de la sursă la sistemul de achiziţie de date, caracteristicile impedanţei celor mai
cunoscuţi traductori se găsesc în tabelul de mai jos.
Traductori Caracteristicile impedanţei
Termocupluri Scăzută (<20 ohm)
Termistor Mare (>1 kohm)
Detectori de temperatură prin variaţia
rezistenţei
Scăzută (<1 kohm)
Senzori de presiune piezo-electrici Mare (>1 kohm)
Punţi tensiometrice Scăzută (<1 kohm)

66
Electrod de sticlă pH Foarte mare (1 Gohm)
Potentiometru (deplasare liniară) Mare (500 ohm to 100 kohm)
Această acţiune trebuie să înceapă cu localizarea cauzei problemei de interferenţă.
Problemele de zgomot pot proveni de la orice, începând cu traductorii şi până la dispozitivele de
achiziţie de date însăşi. Pentru a identifica “vinovatul” trebuie să se aplice un proces de încercare
şi eliminare.
Mai întâi, dispozitivul de achiziţie de date trebuie verificat prin legarea lui la o sursă de
impedanţă redusă fără cabluri şi observarea nivelului de zgomot al măsurătorii. Acest lucru este
uşor de realizat prin scurt-circuitarea semnalelor înalt şi scăzut la intrarea analogică cu un cablu
cât mai scurt posibil, preferabil direct la conectorul de intrare/ieşire al dispozitivului de achiziţie
de date. Nivelul de zgomot observat la această încercare va permite formarea unei opinii asupra
celui mai bun caz posibil de măsurare cu dispozitivul de achiziţie de date respectiv. Dacă
nivelele de zgomot măsurate nu sunt reduse faţă de cele observate în organizarea completă
(dispozitivul de achiziţie de date împreună cu cablurile şi cu sursa de semnal), atunci însuşi
sistemul de măsurare este responsabil pentru zgomotul observat la măsurători. Dacă zgomotul
total observat la dispozitivul de achiziţie de date nu întruneşte specificaţiile deşi zgomotul
propriu sistemului de achiziţie este redus, atunci un alt component al sistemului este responsabil.
Se poate încerca înlăturarea altor plăci din sistem pentru a vedea dacă se reduc nivelele de
zgomot observate. O altă alternativă ar fi schimbarea locaţiei plăcii. De asemenea, poate fi
suspectată plasarea monitorului calculatorului în apropierea plăcii. Iar apropierea plăcii pentru
măsurătorile de semnal de nivel redus, este bine să se ţină monitorul cât mai departe posibil de
cabluri şi de calculator. Aşezarea monitorului deasupra calculatorului nu este de dorit atunci când
se doreşte achiziţionarea sau generarea de semnale de nivel redus.
Următoarea acţiune care poate fi verificată este fixarea cablurilor de la dispozitivul de
condiţionare a semnalului şi mediul în care acestea stau până la dispozitivul de achiziţie de date,
pentru a vedea dacă dispozitivul de condiţionare este vinovatul. Unitatea de condiţionare a
semnalului sau sursa semnalului ar trebui înlocuită cu o sursă cu impedanţă redusă şi apoi,
observate nivelele de zgomot din datele digitizate. Sursa de impedanţă redusă poate fi o
conectare directă a semnalelor înalt şi scăzut de la intrarea analogică. De data aceasta însă,
conectarea este localizată la capătul cel mai îndepărtat al cablului. Dacă nivelele de zgomot
observate sunt aproximativ aceleaşi cu ale sursei efective de semnal, vinovatul este cablarea
şi/sau mediul în care rulează acesta. Nişte soluţii posibile la această situaţie sunt reorientarea
cablurilor şi creşterea distanţei de la sursa de zgomot. Dacă sursa de zgomot nu se cunoaşte,
analiza spectrală a zgomotului poate identifica frecvenţele de interferenţă, ceea ce va duce la
localizarea sursei de zgomot. Dacă nivelele de zgomot observate sunt mai mici decât cele
provenite de la sursa efectivă de semnal, ar trebui încercat un rezistor aproximativ egal cu
rezistenţa de ieşire a sursei. Acest aranjament va arăta dacă problema este cuplarea capacitivă din
cablu datorată impedanţei mari a sursei. Dacă nivelele de zgomot observate de la această ultimă
aranjare sunt mai mici decât cele provenite de la sursa efectivă de semnal, rezultă că nici
cablurile şi nici mediul nu reprezintă o problemă. În acest caz, vinovatul este fie sursa de semnal
în sine sau configuraţia incorectă a dispozitivului de achiziţie de date pentru tipul respectiv de
sursă.

67
8.5 Tehnici de procesare a semnalului pentru reducerea zgomotului
Deşi tehnicile de procesare a semnalului nu sunt un substitut pentru interconectarea
corectă a sistemului, pot fi folosite şi pentru reducerea zgomotului. Toate tehnicile de procesare a
semnalului pentru reducerea zgomotului se bazează pe schimbarea lăţimii de bandă a semnalului
pentru a îmbunătăţi rata semnal/zgomot. În termeni mai largi, acestea pot fi împărţite în
măsurători pre şi post-achiziţie. Exemple de tehnici de pre-achiziţie sunt diversele tipuri de
filtrare pentru a reduce zgomotul din afara benzii de frecvenţă de interes din semnal. Lăţimea de
bandă nu trebuie să depăşească dinamica sau domeniul de frecvenţă al traductorului. Tehnicile
post-achiziţie se pot descrie ca filtrare digitală. Cea mai simplă astfel de tehnică este medierea.
Aceasta duce la o filtrare combinată a datelor achiziţionate şi este utilă în special pentru a
respinge frecvenţe specifice de interferenţă, cum este cea de 50 până la 60 Hz. Ne amintim că la
cuplarea inductivă de la surse de frecvenţă joasă (liniile de putere de 50 – 60 Hz) este mai greu
de realizat ecranarea. Pentru o respingere optimă a interferenţei prin mediere, intervalul de timp
al datelor achiziţionate folosit pentru mediere - Tacq, trebuie să fie un multiplu întreg al Trej = 1/
Frej, unde Frej este frecvenţa care este respinsă în mod optim.
unde
Ncycles este numărul de cicluri ale frecvenţei care interferează, ce este mediată.
Deoarece , în care Ns este numărul de eşantionări folosit pentru a media, iar Ts
este intervalul de eşantionare, ecuaţia de mai sus poate fi scrisă astfel:
sau
Ultima ecuaţie determină combinaţia numărului de eşantionări şi intervalul de eşantionare
pentru a respinge o anumită frecvenţă de interferenţă prin mediere. De exemplu, pentru o
respingere de 60 Hz, folosind Ncycles = 3 şi Ns = 40, putem calcula rata de eşantionare optimă
astfel:
Astfel, medierea a 40 de eşantionări achiziţionate la un interval de eşantionare de 1,25 ms
(sau 800 eşantionări/s), va duce la respingerea unui zgomot de 60 Hz din datele achiziţionate. În
mod similar, mediind 80 de eşantionări achiziţionate la 800 eşantionări/s (10 citiri/s), se vor
respinge ambele frecvenţe – 50 şi 60 Hz. Când se foloseşte o tehnică de filtrare digitală trece-jos,
cum este medierea, nu se poate trage concluzia că datele rezultate nu au erori de curent continuu,
cum ar fi compensările cauzate de buclele de pământ. Cu alte cuvinte, dacă o problemă de
zgomot dintr-un sistem de măsurare se poate rezolva cu ajutorul medierii, sistemul poate avea
totuşi erori de curent continuu după compensare. Dacă este necesară o acurateţe absolută a
măsurătorilor, atunci sistemul trebuie verificat.
Cap. IX - Calitatea eşantionării

68
9.1 Rezoluţia
Rezoluţia este definită ca cea mai mică variaţie a semnalului de intrare pe care un
instrument sau un senzor o poate detecta. Rezoluţia se poate exprima fie în procente, fie sub
forma “x părţi din y”, fie în cel mai convenabil mod - în biţi. Rezoluţia este determinată de către
zgomotul instrumentului şi este cea mai mică schimbare detectabilă de către sistemul de afişare
al instrumentului. De exemplu, dacă avem un multimetru digital fără zgomot care are 5 ½ digiţi
afişaţi şi este setat la 20V domeniu de intrare, rezoluţia acestuia este 0,1mV. Aceasta se poate
determina uitându-ne la schimbarea semnalului măsurat asociată cu cel mai puţin semnificativ
bit. Dacă acelaşi multimetru are nivel de zgomot vârf-la-vârf, egal cu 10 ori valoarea unei
măsurători ideale atunci rezoluţia efectivă este redusă cu 1mV, deoarece orice schimbare a
semnalului mai mică de 1mV este imperceptibilă din zgomot.
În cazul unui convertor analogic-digital ADC, rezoluţia este numărul de nivele binare pe
care le poate folosi convertorul pentru a reprezenta un semnal. Pentru a determina numărul de
nivele binare disponibile bazate pe numărul de biţi de rezoluţie, se calculează 2biţi de rezoluţie
. Drept
urmare, cu cât este mai mare rezoluţia, cu atât mai multe nivele vor fi folosite pentru semnal. De
exemplu, un convertor ADC cu rezoluţia de 3 biţi poate măsura 23 sau 8 nivele de tensiune, în
timp ce un convertor cu rezoluţia de 12 biţi poate măsura 212
sau 4096 nivele de tensiune. Pentru
convertorul ADC cu 3 biţi, mergând cu exemplul mai departe, cel mai scăzut nivel al tensiunii va
corespunde lui 000, următorul lui 001, şi tot aşa până la 111.
Pentru a ilustra acest lucru, să ne imaginăm cum ar fi reprezentată o undă sinusoidală
când este trecută printr-un convertor ADC cu diverse rezoluţii. Figura 65 compară un convertor
ADC cu 3 biţi şi unul cu 16 biţi. Cel cu 3 biţi poate reprezenta 8 nivele de tensiune. Cel cu 16 biţi
poate reprezenta 65.536 nivele de tensiune. Reprezentarea undei sinusoidale cu rezoluţia de 3 biţi
arată mai mult ca o funcţie în trepte decât o sinusoidă. Cea de 16 biţi însă furnizează o sinusoidă
clară. Un mod de a imagina rezoluţia este atunci când ne gândim la ecranul televizorului. Cu cât
este mai mare rezoluţia ecranului, cu atât mai mulţi pixeli reprezintă imaginea. O altă modalitate
de a imagina rezoluţia este şi prin luarea în considerare a cantităţii de culoare pe care o foloseşte
monitorul unui calculator pentru a afişa o imagine. Dacă se folosesc doar 3 biţi, imaginea este
întreruptă şi este dificil de distins detaliile, dar dacă se folosesc 16 biţi, imaginea va fi completă.
De reamintit că rezoluţia este o cantitate fixă a unui convertor ADC şi depinde de dispozitivul de
măsurare folosit.

69
Fig. 65 -Imaginea digitală a unei unde sinusoidale obţinută cu un convertor ADC cu 3 biţi şi unul
cu 16 biţi
9.2 Sensibilitatea măsurătorii
Sensibilitatea este definită ca o măsură a celui mai mic semnal pe care instrumentul îl
poate măsura la cea mai scăzută setare a domeniului instrumentului. Sensibilitatea nu este legată
de rezoluţie. De exemplu, un aparat de măsură analogic pe 8 biţi poate avea o sensibilitate mai
mare decât a unuia pe 16 biţi. Un alt exemplu, un multimetru digital cu cel mai mic domeniu de
măsurare de 10V poate fi capabil să detecteze semnale cu rezoluţia de 1mV, dar cea mai mică
tensiune detectabilă pe care o poate măsura este de 15mV. În acest caz, multimetrul are o
rezoluţie de 1mV şi o sensibilitate de 15mV.
9.2.1 Acurateţea şi exemple de calcul a acesteia
Acurateţea este definită ca o măsură a capacităţii instrumentului de a indica cu precizie
valoarea semnalului măsurat. Acest termen nu este legat de rezoluţie. Totuşi, nu poate fi
niciodată mai bună decât rezoluţia. Modul în care se specifică acurateţea unei măsurători depinde
de tipul instrumentului de măsură folosit. Un multimetru digital este deseori specificat ca:
sau
sau
De exemplu, să considerăm un multimetru digital ce este reglat la un domeniu de 10V şi
operează la 90 de zile de la calibrare la temperatura de 23ºC ±5ºC, măsurând un semnal de 7V.
Specificaţiile de acurateţe pentru aceste condiţii sunt: ±(20 ppm al citirii + 6 ppm al domeniului).
Pentru a determina acurateţea multimetrului digital în aceste condiţii, se foloseşte formula de mai
sus:
Prin urmare, citirea ar trebui să fie undeva în jurul tensiunii de intrare reală într-un
interval de 200µV.
Acurateţea poate fi definită şi în termeni de deviaţie de la o funcţie de transfer ideală. Un
dispozitiv de achiziţie de date este deseori specificat ca:
-

70
-
De exemplu, pentru un domeniu de 10V, acurateţea absolută la scară completă a unui
dispozitiv de achiziţie de date din seria M (National Instruments) este:
Este important de ştiut că acurateţea unui instrument depinde nu numai de instrument în
sine, ci şi de tipul de semnal măsurat. Dacă semnalul de măsurat este zgomotos, acurateţea
măsurătorii va fi afectată nefavorabil.
9.3 Diferenţa dintre precizie şi acurateţe
Precizia se defineşte ca o măsură a stabilităţii instrumentului şi a capacităţii sale de a
returna aceleaşi măsurători de fiecare dată când se măsoară, pentru acelaşi semnal de intrare.
Precizia este dată de formula:
unde Xn este valoarea măsurătorii “n”
Av(Xn) este valoarea medie a setului de măsurători “n”
De exemplu, dacă se monitorizează o tensiune constantă de 1V şi se observă că valoarea
măsurată se modifică cu 20µV între măsurători, atunci precizia măsurătorii va fi:
Această specificare este valabilă atunci când se foloseşte voltmetrul pentru a calibra un
dispozitiv sau a realiza diverse măsurători. Figura 66 demonstrează diferenţa dintre acurateţe şi
precizie. Acurateţea se referă la cât de aproape este valoarea măsurată de valoarea reală, iar
precizia se referă la cât de apropiate sunt măsurătorile individuale una de cealaltă.

71
Fig.66 -Acurateţe versus precizie
9.4 Zgomotul şi sursele de zgomot
Zgomotul este reprezentat de orice semnal nedorit care interferează cu semnalul dorit.
Zgomotul interferează cu măsurătoarea prin inducerea incertitudinii, care tinde să fie variabilă în
timp. Poate fi aleatoriu sau periodic. Zgomotul poate fi tranzitoriu, poate avea frecvenţe fixe sau
poate fi aleatoriu pe o anumită lăţime de bandă. Uneori, zgomotul este considerat separat de
specificaţiile de acurateţe deoarece medierea şi celelalte tehnici pot fi folosite pentru a-l reduce.
Cu toate acestea în alte cazuri poate fi inclus în specificaţiile de acurateţe.
a) Surse de zgomot – în utilizarea aparatelor există multe surse de zgomot. Zgomotul ca
rezultat al sursei înseşi se numeşte “intrinsec”. Aceste surse de zgomot se datorează unor surse
termice (cum este zgomotul unui rezistor) sau poate fi de natură 1/F (tremurat), cauzat de
dispozitivele semiconductoare. De asemenea, zgomotul poate proveni şi de la mediul
înconjurător, cum ar fi de la liniile de putere, luminile din camere, motoare şi surse de frecvenţă
radio (transmiţători radio, telefoane mobile, staţii radio, etc).
b) Zgomotul termic – un circuit electronic ideal nu produce nici un fel de zgomot propriu,
deci semnalul de ieşire dintr-un asemenea circuit conţine doar zgomotul din semnalul original.
Însă circuitele electronice reale şi componentele produc un anumit nivel de zgomot propriu.
Chiar şi un simplu resistor de valoare fixă este zgomotos.
Fig. 67
a) rezistor ideal, fără zgomot
b) rezistor real, cu o sursă de zgomot termal intern
Figura 67 a) arată circuitul echivalent pentru un resistor ideal, fără zgomot. Zgomotul
inerent este reprezentat în figura 67 b) de către o sursă de tensiune Vn, în serie cu rezistenţa
ideală, fără zgomot Ri. La orice temperatură peste 0 absolut (0°K sau -273°C), electronii din

72
orice material sunt într-o mişcare aleatorie continuă. Datorită caracterului aleatoriu al mişcării,
nu există curent detectabil în nici o direcţie. Cu alte cuvinte, un electron deviat în orice direcţie
este anulat după perioade scurte de timp printr-o deviere egală în direcţia opusă. Mişcarea
electronilor este, prin urmare, decorelată statistic. Există totuşi o serie continuă de pulsuri
aleatorii de curent generate în material, iar aceste pulsuri sunt interpretate ca şi semnal de
zgomot. Acest semnal are diverse denumiri: zgomot Johnson, zgomot de agitaţie termică sau
zgomot termic.
Expresia zgomotului Johnson este:
unde Vn este tensiunea zgomotului (V)
K este constanta lui Boltzmann (1,38 x 1023J/°K)
T este temperature în grade Kelvin (°K)
R este rezistenţa în ohmi (Ω)
B este lăţimea de bandă în hertzi (Hz)
Odată cu constantele şi expresia normalizată la 1 kΩ, ecuaţia se reduce la:
Soluţia ecuaţiei de mai sus se citeşte “nanovolţi per rădăcina pătrată hertzi”. În
această ecuaţie, un resistor de 1MΩ va avea un zgomot termic de 126nV/ √Hz. Ceea ce trebuie
ţinut minte este că zgomotul creşte odată cu temperatura şi rezistenţa, dar ca o funcţie pătratică.
Deci, va fi nevoie de cvatruplat rezistenţa pentru a dubla zgomotul acelui resistor.
c) Zgomotul 1/F sau tremurat – dispozitivele semiconductoare tind să aibă un zgomot care
nu este plat odată cu frecvenţa. El creşte la frecvenţă joasă. Este denumit zgomot 1/F, zgomot
roz, zgomot în exces sau zgomot tremurat. Acest tip de zgomot apare, de asemenea, la multe
sisteme fizice, altele decît cele electrice. Exemple sunt proteinele, timpul de reacţie al proceselor
cognitive şi chiar activitatea seismică.
Fig. 68 -Profilul spectral al zgomotului în prezenţa zgomotului 1/F şi zgomotului termic

73
9.5 Strategii de reducere a zgomotului
Deşi zgomotul reprezintă o problemă foarte serioasă pentru proiectanţi, mai ales atunci
când sunt prezente nivele de semnal redus, pot fi folosite câteva abordări normale pentru a
minimiza efectele zgomotului termic al unui sistem. De exemplu:
1. să se păstreze rezistenţa sursei şi a intrării amplificatorului cât mai scăzută posibil;
folosirea unei rezistenţe de valoare ridicată va duce la creşterea zgomotului termic.
2. zgomotul termic este, de asemenea, dependent de lăţimea de bandă a circuitului. Prin
urmare, reducerea lăţimii de bandă a circuitului la minimum va duce la reducerea
zgomotului. Însă acest lucru trebuie făcut cu grijă deoarece semnalele au un spectru în
frecvenţă care trebuie păstrat pentru a avea măsurători corecte. Soluţia este potrivirea
lăţimii de bandă cu răspunsul în frecvenţă necesar semnalului de intrare.
3. să se prevină ca zgomotul exterior să afecteze performanţele sistemului prin utilizarea
adecvată a împământării, ecranării, cablării, plasării fizice a cablurilor cu grijă şi filtrării.
4. să se folosească un amplificator de zgomot redus în etapa de intrare a sistemului.
5. pentru anumite circuite semiconductoare, să se utilizeze cel mai scăzut potenţial al
alimentatorului de curent continuu.
Cap. X - Semnale ale funcţiei fereastră
Pentru a îmbunătăţi caracteristicile spectrale ale unui semnal eşantionat este bine să se
folosească ferestre de netezire. Când se foloseşte transformata Fourier sau analiza spectrală pe
date cu lungime limitată, se pot utiliza ferestre de netezire pentru a minimiza discontinuităţile
semnalelor achiziţionate scurte, reducând astfel dispersia spectrală. Cantitatea de dispersie
spectrală depinde de amplitudinea discontinuităţii. Pe măsură ce discontinuitatea se măreşte,
dispersia spectrală creşte şi invers. Ferestrele de netezire reduc amplitudinea discontinuităţilor de
la marginile fiecărei pseudo perioade şi acţionează ca nişte filtre predefinite, înguste şi de tip
trece jos.
Procesul de ferestruire a unui semnal implică multiplicarea înregistrărilor de timp printr-o
fereastră de netezire de lungime limitată, a cărei amplitudine variază lin şi gradual spre 0 la
margini. Lungimea sau intervalul de timp al unei ferestre de netezire este definit în termeni de
număr de eşantioane. Multiplicarea în domeniul de timp este echivalentă cu spiralarea în
domeniul frecvenţei. Astfel, spectrul unui semnal ferestruit este o spiralare a spectrului
semnalului original cu spectrul ferestrei de netezire. Ferestruirea schimbă forma unui semnal din
domeniul de timp, afectând spectrul vizibil. Figura 69 ilustrează spiralarea spectrului original al
unui semnal cu spectrul ferestrei de netezire.

74
Fig. 69
Chiar dacă nu se aplică o fereastră de netezire unui semnal, un efect de ferestruire tot va
apărea. Achiziţia unei înregistrări de timp limitate a unui semnal de intrare produce un efect de
multiplicare a semnalului în domeniul de timp printr-o fereastră uniformă. Fereastra uniformă are
o formă dreptunghiulară şi o înălţime uniformă. Multiplicarea semnalului de intrare în domeniul
de timp printr-o fereastră uniformă este echivalentă cu spiralarea spectrului semnalului cu
spectrul ferestrei uniforme în domeniul de timp, care are o caracteristică de funcţionare
sincronizată. Figura 70 arată rezultatul aplicării unei ferestre Hamming la un semnal din
domeniul de timp.

75
Fig. 70
În figura 70, unda de timp a semnalului ferestruit se ascute gradual către 0 la margini
deoarece fereastra Hamming minimizează discontinuităţile de-a lungul marginilor de tranziţie ale
undei. Aplicarea unei ferestre de netezire datelor din domeniul de timp înainte de a transforma
datele în domeniul de frecvenţă duce la reducerea dispersiei spectrale. Figura 71 arată efectele
ferestrelor de netezire uniformă, Hanning şi cu Flat Top - aplicate unui semnal.
Fig.71
Setul de date pentru semnalul de mai sus constă dintr-un număr întreg de cicluri – 256.
Dacă componentele frecvenţei din semnalul original se potrivesc exact cu linia frecvenţei (aşa
cum este cazul achiziţionării unui număr întreg de cicluri), se vede numai lobul principal al
spectrului. Ferestrele de netezire au un lob principal în jurul frecvenţei de interes. Lobul principal
este o caracteristică a domeniului de frecvenţă al ferestrelor. Fereastra uniformă are cel mai
îngust lob. Ferastra Hanning şi cea cu vârful plat introduc o oarecare împrăştiere. Fereastra cu
vârf plat are un lob principal mai larg decât fereastra uniformă sau cea Hanning. Pentru un număr
întrg de cicluri, toate ferestrele de netezire tind către aceeaşi amplitudine de vârf şi au o acurateţe
excelentă a amplitudinii. Lobii marginali nu apar deoarece spectrul ferestrei de netezire se
apropie de 0 la Δf intervale pe oricare din părţile lobului principal.
Figura 71 arată, de asemenea, valorile la frecvenţa de 254Hz până la 258Hz pentru fiecare
fereastră de netezire. Eroarea de amplitudine la 256Hz este egală cu 0dB pentru fiecare fereastră
de netezire. Figura 72 arată valorile spectrale între 240Hz şi 272Hz. Valorile actuale din seria
spectrală rezultantă pentru fiecare fereastră de netezire de la 254Hz la 258Hz sunt arătate
dedesubtul graficului. Δf este egal cu 1Hz.
Dacă o înregistrare de timp nu conţine un număr întreg de cicluri, spectrul
continuu al ferestrei de netezire se deplasează de la centrul lobului principal la o
fracţiune egală cu Δf, ce corespunde diferenţei dintre componenta frecvenţei şi
frecvenţele FFT. Această deplasare face ca lobii marginali să apară în cadrul spectrului.
În plus, eroarea de amplitudine apare la vârful frecven ţei fiindcă eşantionarea lobului

76
central este în afara centrului şi murdăreşte spectrul. Figura 72 arată efectul dispersiei
spectrale la un semnal al cărui set de date constă din 256,5 cicluri.
Fig. 72
În figura 72, pentru un număr ne-întreg de cicluri, fereastra Hanning şi cea cu vârf plat
introduc mult mai puţină dispersie spectrală decât fereastra uniformă. De asemena, eroarea de
amplitudine este mai bună cu fereastra Hanning şi cea cu vârf plat. Fereastra cu vârf plat
demonstrează o foarte bună acurateţe a amplitudinii şi are o împrăştiere mai mare şi lobi
marginali mai înalţi decât fereastra Hanning.
Figura 73 arată diagrama-bloc a unui VI care măsoară spectrele ferestruite şi ne-
ferestruite ale unui semnal compus din suma a două sinusoide.

77
Fig. 73 – Diagrama-bloc
În figura 74 se observă amplitudinile şi frecvenţele a 2 sinusoide şi rezultatele
măsurătorii. Frecvenţele sunt date în unităţi de cicluri. Se observă că spectrul neferestruit
prezintă o dispersie mai mare de 20dB la frecvenţa sinusoidei mai mici.
Fig. 74 – Amplitudinile şi frecvenţele a două sinusoide
Se pot aplica tehnici şi mai sofisticate pentru a obţine descrieri cât mai corecte ale
semnalului original de timp în domeniul de frecvenţă. Însă, în majoritatea aplicaţiilor, aplicarea
unei ferestre de netezire este suficientă pentru a obţine o reprezentare mai bună a frecvenţei
semnalului.
Cap. XI - Noţiuni fundamentale privind analiza semnalelor bazate pe FFT
şi măsurători în LabVIEW şi LabWindows/CVI

78
Transformata Fourier rapidă (FFT) şi spectrul de putere sunt nişte instrumente foarte
puternice de analiză şi măsurare a semnalelor de la dispozitivele de achiziţie de date DAQ. De
exemplu, se pot achiziţiona semnale efective în domeniu-timp, măsura conţinutul în frecvenţă şi
converti rezultatele în unităţi reale, apoi afişa aceste rezultate. Prin folosirea dispozitivelor DAQ,
se poate construi un sistem de măsurare cu un cost mai mic şi ocoli lucrul cu un instrument de
sine stătător cu analizor de spectru sau FFT. În plus, există flexibilitatea configurării propriului
proces de măsurare, care să întrunească toate cerinţele dorite.
11.1 Calcule de bază ale analizei în frecvenţă a semnalelor
Calculele de bază pentru analizarea în frevenţă a semnalelor includ convertirea de la un
spectru de putere bilateral la un spectru de putere unilateral, prin ajustarea rezoluţiei frecvenţei şi
multiplicarea spectrului, folosind FFT şi transformând puterea şi amplitudinea în unităţi
logaritmice. Spectrul de putere calculat la FFT rezultă sub forma unei matrice care conţine
spectrul de putere bilateral a unui semnal în domeniul-timp. Graficul spectrului de putere
bilateral arată componentele de ordonată 4
2
kA la frecvenţe negative şi pozitive, unde Ak este
amplitudinea de vârf a componentei sinusoidale la frecvenţa k. Componenta DC are o ordonată
de A02, unde A0 este amplitudinea componentei DC din semnal.
Figura 75 prezintă spectrul de putere rezultat dintr-un semnal (spectrul arată doar
componente la frecvenţe pozitive) în domeniul-timp, care constă dintr-o sinusoidă de 3Vrms la
128Hz, o sinusoidă de 3Vrms la 256Hz şi o componentă DC de 2VDC. Sinusoida de 3Vrms are
o tensiune de vârf de sau de aproximativ 4,2426V. Spectrul de putere este calculat din
funcţia de bază FFT.
Fig. 75 -Spectrul de putere bilateral al unui semnal
11.2 Conversia de la un spectru de putere bilateral la unul unilateral
Marea majoritate a instrumentelor reale de analiză a frecvenţei afişează numai jumătatea
pozitivă a spectrului de frecvenţă deoarece spectrul unui semnal real este simetric faţă de
componenta de DC. Astfel, informaţia privind frecvenţa negativă este de prisos. Rezultatele celor
două părţi din funcţia analizei includ jumătatea pozitivă a spectrului, urmată de jumătatea
negativă, aşa cum se vede în figura anterioară.

79
Într-un spectru bilateral, jumătate din energie este afişată la frecvenţă pozitivă şi cealaltă
jumătate, la frecvenţă negativă. Drept urmare, pentru a converti un spectru bilateral într-unul
unilateral, trebuie înlăturată cea de-a doua jumătate a graficului şi multiplicat fiecare punct rămas
cu 2, cu excepţia DC.
unde SAA(i) este spectrul de putere bilateral
GAA(i) este spectrul de putere unilateral
N este lungimea spectrului bilateral
Restul SAA al spectrului de putere bilateral este eliminat: de la N/2 la N-1.
Valorile non DC din spectrul de putere unilateral sunt la o înălţime de 2
2
kA, care este
echivalent cu
2
2
kA, unde
2
kA reprezintă amplitudinea rms a componentei sinusoidale la
frecvenţa k. Astfel, unităţile spectrului de putere sunt deseori numite cantitatea pătratică rms, în
care cantitatea este unitatea de măsură a semnalului în domeniul-timp. De exemplu, spectrul de
putere unilateral a unei unde de tensiune este în volţi rms pătratici.
Figura 76 arată spectrul unilateral al semnalului din spectrul bilateral al figurii anterioare.
Fig. 76
După cum se vede, nivelul componentelor frecvenţei de non DC este dublat în comparaţie
cu cel din figura 75. În plus, spectrul se opreşte la jumătatea frecvenţei de eşantionare.
11.3 Ajustarea rezoluţiei frecvenţei şi multiplicarea spectrului
Cele două figuri de mai sus arată puterea versus frecvenţă pentru un semnal în domeniul-
timp. Domeniul de frecvenţă şi rezoluţia axei X a graficului spectrului depind de rata de
eşantionare şi de numărul de puncte achiziţionate. Numărul de puncte ale frecvenţei sau linii din
figura a doua este egal cu 2
N
, N fiind numărul de puncte din semnalul în domeniul-timp
achiziţionat. Prima linie de frecvenţă este la 0Hz, adică DC. Ultima linie de frecvenţă din

80
spectrul unilateral este la N
FF ss
2, în care Fs este frecvenţa la care semnalul în domeniul-timp
achiziţionat a fost eşantionat. Liniile de frecvenţă apar la intervale ∆f, unde N
Ff s
. Liniile de
frecvenţă mai pot fi privite şi ca intervale (bins) ale frecvenţei sau intervale FFT deoarece te poţi
gândi la o FFT ca la un set de filtre paralele cu lăţimea de bandă f centrată pe frecveţa
intervalului, pentru fiecare valoare a frecvenţei de la DC la N
FF ss
2. În mod alternativ, f se
poate calcula sub forma tNf
*
1
, în care t este perioada de eşantionare. Astfel N* t
reprezintă lungimea înregistrării în timp, ce conţine semnalul în domeniul-timp achiziţionat.
Semnalul din cele două figuri conţine 1024 de puncte eşantionate la 1,024kHz pentru a produce
un f = 1Hz şi un domeniu al frecvenţei de la DC la 511Hz.
Calculele pentru axa frecvenţei demonstrează că frecvenţa de eşantionare determină
domeniul de frecvenţă sau lăţimea de bandă a spectrului şi că, pentru o frecvenţă de eşantionare
dată, numărul de puncte achiziţionate în înregistrarea semnalului în domeniul-timp determină
rezoluţia frecvenţei. Pentru a putea creşte rezoluţia frecvenţei la un domeniu de frecvenţă dat,
trebuie crescut numărul de puncte achiziţionate la aceeaşi frecvenţă de eşantionare. De exemplu,
achiziţionarea a 2048 de puncte la 1,024kHz ar produce un f = 0,5Hz, cu domeniul de frecvenţă
de la 0 la 511,5Hz. În mod alternativ, dacă rata de eşantionare ar fi fost 10,24kHz cu 1024 de
puncte, f ar fi fost de 10Hz, cu un domeniu al frecvenţei de la 0 la 5,11kHz.
11.4 Calcule folosind transformata Fourier rapidă
Spectrul de putere indică puterea ca amplitudine medie pătratică la fiecare linie de
frecvenţă dar nu include informaţia fazei. Deoarece această informaţie se pierde, se poate folosi
FFT pentru a vedea atât amplitudinea, cât şi informaţia fazei unui semnal la diferite frecvenţe.
Informaţia fazei pe care o produce FFT este raportată la momentul de început al
semnalului în domeniul-timp. Din acest motiv la analize repetate trebuie să se măsoare din
acelaşi punct al semnalului pentru a putea obţine citiri identice al fazei. O undă sinusoidală poate
arăta o fază de -90 la frecvenţa undei sinusoidale. O undă cosinusoidală arată o fază de 0 dacă
este achiziţionată faţă de acelaşi moment de timp. În multe dintre cazuri, preocuparea o
reprezintă fazele relative dintre componente sau diferenţa de fază dintre două semnale
achiziţionate simultan. Diferenţa de fază dintre două semnale poate fi văzută prin folosirea unor
funcţiuni FFT avansate.
Tranformata FFT răspunde printr-un spectru bilateral într-o formă complexă (cu părţi
reale şi imaginare), care trebuie scalată şi convertită la o formă polară pentru a obţine
magnitudinea şi faza. Axa de frecvenţă este identică cu cea a spectrului de putere bilateral.
Numărul de puncte din rezultatul ecuaţiilor de mai jos (r şi ⱷ) dar şi amplitudinea componentelor
transformatei FFT este legată de numărul de puncte din semnalul în domeniu-timp. Pentru a
calcula amplitudinea şi faza versus frecvenţă din FFT, se foloseşte ecuaţia următoare:

81
unde funcţia arctangentei produce valori ale fazei între - şi + , o gamă întreagă de 2 radiani.
Folosirea funcţiei de conversie de la dreptunghiular la polar, pentru a converti sistemul complex
N
AFFT )( la magnitudinea r şi faza , este echivalent cu folosirea formulei de mai sus.
Spectrul bilateral al amplitudinii arată, de fapt, jumătate din amplitudinea de vârf la
frecvenţe pozitive şi negative. Pentru a face conversia la forma unilaterală, se multiplică fiecare
componentă de la frecvenţele pozitive cu doi (exceptând cea a DC) şi se renunţă la cealaltă
jumătate a domeniului FFT corespunzătoare frecvenţelor negative. Unităţile spectrului unilateral
al amplitudinii dau amplitudinea de vârf a fiecărei componente sinusoidale ce corespunde
semnalul în domeniu-timp.
Pentru a putea studia spectrul amplitudinii în volţi rms (sau altă cantitate), se împart
componentele non DC cu rădăcina pătratică a lui 2, după ce se converteşte spectrul în formă
unilaterală. Deoarece componentele non DC au fost înmulţite cu 2 pentru a face conversia de la
forma bilaterală la cea unilaterală, se poate calcula spectrul amplitudinii rms direct din spectrul
amplitudinii bilaterală, prin înmulţirea componentelor non DC cu rădăcina pătratică a lui 2 şi
apoi, renunţarea la cea de-a doua jumătate a domeniului FFT. Ecuaţiile următoare prezintă
întregul calcul, de la o FFT bilaterală la un spectru al amplitudinii unilateral.
unde i este numărul liniei de frecvenţă a transformatei FFT al lui A.
Magnitudinea în volţi rms duce la tensiunea rms a fiecărei componente sinusoidale a
semnalului în domeniu-timp. Pentru a determina spectrul fazei în grade, se utilizează următoarea
ecuaţie:
Spectrul amplitudinii este strâns legat de spectrul de putere. Se poate calcula spectrul
unilateral de putere prin ridicarea la pătrat a spectrului unilateral al amplitudinii rms. Invers, se
poate calcula spectrul amplitudinii spectrului prin scoaterea rădăcinii pătratice din spectrul de

82
putere. Spectrul bilateral de putere este, de fapt, calculat din transformata FFT după cum
urmează:
unde FFT*(A) înseamnă conjugata complexă a lui FFT (A).
Când se utilizează transformata FFT în LabVIEW şi LabWindows/CVI, trebuie ţinut cont
de faptul că viteza de calcul a spectrului de putere si FFT depind de numărul de puncte
achiziţionate. Dacă N poate fi divizat în numere prime mici, Lab VIEW şi LAbWindows-CVI
folosesc un algoritm foarte eficient Cooley-Tukey. Altminteri (pentru numere prime mari),
LabVIEW foloseşte alţi algoritmi pentru a calcula transformata Fourier discretă, iar aceste
metode durează deseori mai mult. De exemplu, timpul necesar pentru a calcula o transformată
FFT de 1000 puncte şi 1024 puncte este aproape acelaşi, dar o FFT de 1023 puncte poate dura
dublul timpului pentru a o calcula. Instrumente tipice de lucru folosesc FFT de 1.024 şi 2.048
puncte.
11.5 Conversia în unităţi logaritmice
De cele mai multe ori, amplitudinea sau spectrul de putere sunt indicate în unităţi
logaritmice decibeli (dB). Folosind această unitate de măsură, sunt uşor de observat domeniile
dinamice largi; mai precis, sunt uşor de observat componente mici ale semnalului în prezenţa
unora mari. Decibelul este o unitate de proporţie şi se calculează astfel:
unde P este puterea măsurată şi Pr este puterea de referinţă.
Ecuaţia următoare se foloseşte pentru a calcula proporţia în decibeli din valori ale
amplitudinii:
unde A este amplitudinea măsurată şi Ar este amplitudinea de referinţă.
Când se foloseşte amplitudinea sau puterea calculată ca şi amplitudine pătratică a
aceluiaşi semnal, nivelul rezultat al decibelilor este acelaşi. Înmulţirea ratei decibelilor cu 2 este
echivalentă cu o rată pătratică. Prin urmare, se obţine acelaşi nivel al decibelilor indiferent dacă
se foloseşte amplitudinea sau spectrul de putere.
Aşa cum s-a vazut în ecuaţiile precedente ale puterii şi amplitudinii, trebuie furnizată o
referinţă pentru măsurătoarea în decibeli. Această referinţă corespunde nivelului de 0dB. Se
folosesc mai multe convenţii. O convenţie comună este aceea de a folosi referinţa de 1Vrms
pentru amplitudine sau 1Vrms pătratic pentru putere, definind o mărime în dBV sau dBVrms. În
acest caz, 1Vrms corespunde la 0dB. O altă formă comună a dB este dBm, care corespunde unei
referinţe de 1mW la o sarcină rezistivă de 50 pentru frecvenţe radio unde 0dB înseamnă
0,22Vrms, sau 600 pentru frecvenţe radio unde 0dB înseamnă 0,78Vrms.
11.6 Anti-asocierea şi interfaţa de achiziţie pentru analiza semnalelor bazate pe FFT
Măsurătorile bazate pe FFT necesită digitizarea unui semnal continuu. Conform
criteriului Nyquist, frecvenţa de eşantionare Fs trebuie să fie cel puţin dublul maximului
componentei de frecvenţă din semnal. Dacă acest criteriu este încălcat, are loc un fenomen numit

83
asociere. Figura 77 arată un semnal eşantionat corespunzător şi un semnal sub-eşantionat. În
acest ultim caz, rezultatul este un semnal asociat, care pare a fi la o frecvenţă mai scăzută decât
semnalul original.
Fig. 77 -Eşantionare corectă şi incorectă a semnalului
Atunci când criteriul Nyquist este încălcat, componentele frecvenţei de deasupra a
jumătate din frecvenţa de eşantionare apar ca şi componente al frecvenţei sub jumătate din
frecvenţa de eşantionare, rezultând o reprezentare eronată a semnalului. De exemplu, o
componentă a frecvenţei ss Ff
F0
2apare la frecvenţa Fs-f0. Figura 78 arată frecvenţele associate
care apar atunci când semnalul cu componente reale de 25, 70, 160 şi 510Hz este eşantionat la
100Hz. Frecvenţele associate apar la 10, 30 şi 40Hz.
Fig. 78
Înainte ca un semnal să fie digitizat, se poate preveni asocierea folosind filtre de anti-
asociere pentru a atenua componentele frecvenţei de deasupra jumătăţii frecvenţei de eşantionare
până la un nivel sub domeniul dinamic al convertorului analog-digital ADC. De exemplu, dacă
digitizorul are un domeniu complet de 80dB, componentele cu frecvenţa deasupra jumătăţii
frecvenţei de eşantionare trebuie să fie atenuate cu mai mult de 80dB sub scala completă.
Aceste componente de frecvenţă mai înaltă nu interferează cu măsurătoarea. Dacă se ştie
că lăţimea de bandă de frecvenţă a semnalului de măsurat este mai scăzută decât jumătate din
frecvenţa de eşantionare, se poate alege să nu se folosească filtre de anti-asociere. Figura 79 arată
răspunsul cu frecvenţa de intrare al unei plăci de achiziţie a semnalului dinamic de la NI, care are
filtre anti-asociere. De observat cum este puternic atenuat un semnal de intrare cu frecvenţe
deasupra jumătăţii frecvenţei de eşantionare.

84
Fig. 79 -Lăţimea de bandă a unui dispozitiv NI versus frecvenţă, normalizată la rata de eşantionare
11.7 Limitele interfeţei de achiziţie
În afara reducerii componentelor cu frecvenţa mai mare decât jumătate din frecvenţa de
eşantionare, interfaţa de achiziţie folosită introduce anumite limitări ale latimii de bandă sub
jumătate din frecvenţa de eşantionare. Caracteristica de atenuare a amplitudinii în funcţie de
frecvenţă nu este ideală de tip trece-jos cu o pantă în zona de atenuare verticală ci există o zonă
de frecvenţă în care se face trecerea de la zona de trecere la cea de atenuare. Pentru a elimina cu
certitudine componentele din semnal cu frecvenţa mai mare decât jumatate din rata de
eşantionare, filtrele anti –asociere au caracteristica de atenuare cu frecvenţa de început al
atenuării mai mică decât jumătate din rata de eşantionare. Deoarece aceste filtre atenuează
porţiunea cea mai înaltă a frecvenţei spectrului, se doreşte limitarea graficului la lăţimea de
bandă considerată justificată pentru măsurătoare.
De exemplu, în cazul din figura anterioară, netezimea amplitudinii este menţinută la
±0,1dB, până la 0,464 din frecvenţa de eşantionare la 20kHz pentru toate reglajele amplificării,
iar apoi amplificarea de intrare începe să se atenueze. Punctul corespunzător unei atenuări de -
3dB intrării (corespunzător unei reduceri la jumătatea puterii la ieşire) apare la 0,493 din
spectrul de intrare. De aceea, în loc să se arate tot spectrul de intrare până la o frecvenţă egală cu
jumătatea frecvenţei de eşantionare, se poate să se arate numai 0,464 din spectrul de intrare.
Pentru a face acest lucru, se va multiplica numărul de puncte achiziţionate cu 0,464, respectiv se
calculează numărul liniilor de frecvenţă de afişat.
Caracteristicile interfeţei de achiziţie a semnalului afectează măsurătoarea. Plăcile de
achiziţie de semnal dinamic de la NI şi analizorii de semnal dinamic sunt interfeţe foarte bune de
achiziţie pentru realizarea măsurătorilor analizei de semnal bazată pe FFT. Aceste plăci folosesc
tehnologie de modulare delta-sigma, care realizează o netezime foarte bună a amplitudinii, filtre
de anti-asociere de înaltă performanţă şi un domeniu dinamic larg, aşa cum se vede în figura
anterioară. Canalele de intrare sunt, de asemenea, eşantionate simultan pentru o performanţă
bună a măsurării multi-canal. La o frecvenţă de eşantionare de 51,2kHz, aceste plăci pot realiza

85
măsurări ale frecvenţei în domeniul de DC de 23,75kHz. Netezimea amplitudinii este maxim
±0,1dB de la DC la 23,75kHz.
a) Calcularea lăţimii de bandă a măsurării sau numărul de linii pentru o frecvenţă de
eşantionare dată
Plăcile de achiziţie de semnal dinamic conţin filtre de anti-asociere în cadrul procesului
de digitizare. În plus, domeniile de frecvenţă a filtrelor de separare sunt acordate cu rata de
eşantionare pentru a îndeplini criteriul Nyquist, aşa cum se vede în ultima figură. Caracteristica
de atenuare abruptă a filtrelor de anti-asociere de la aceste plăci permite ca numărul de linii de
frecvenţă utile dintr -un spectru cu 1024 linii bazat pe FFT să fie 475 de linii pentru o netezime a
amplitudinii de ±0,1dB.
Pentru a calcula lăţimea de bandă a măsurătorii pentru o frecvenţă de eşantionare dată, se
multiplică frecvenţa de eşantionare cu 0,464 pentru o netezime de ±0,1dB. De asemenea, cu cât
este mai mare transformata FFT, cu atât mai mare este numărul liniilor de frecvenţă. O
transformată cu 2048 de linii (2048 de valori măsurate din semnal) FFT produce dublul
numărului de linii utile precizat mai sus.
11.8 Specificaţiile domeniului dinamic
Raportul semnal-zgomot (SNR) al plăcilor de achiziţie a semnalului dinamic de la NI este
93dB. SNR se defineşte ca:
dBV
VSNR
n
s )(log102
2
10
unde Vs şi Vn sunt amplitudinile rms ale semnalului şi zgomotului. De obicei, specificată pentru
SNR este o lăţime de bandă. În acest caz, lăţimea de bandă este domeniul de frecvenţă al intrării
plăcii, care este legat de rata de eşantionare. Un raport SNR de 93dB înseamnă că se pot detecta
componentele frecvenţei semnalului care sunt cu 93dB sub domeniul complet al plăcii. Acest
lucru este posibil deoarece nivelul zgomotului de intrare total cauzat de interfaţa de achiziţie este
cu peste 93dB sub domeniul de intrare complet al plăcii.
Dacă semnalul monitorizat este un semnal de bandă îngustă (adică energia semnalului
este concentrată într-o bandă îngustă de frecvenţe), este posibilă detectarea unui semnal chiar
mai jos de -93dB. Acest lucru este posibil deoarece energia zgomotului plăcii este împrăştiată în
tot domeniul de intrare al frecvenţei.
Domeniul dinamic al plăcilor de achiziţie a semnalului dinamic este de 95dB. Pe lângă
zgomotul de intrare, interfaţa de achiziţie poate introduce frecvenţe false în spectrul de măsurare
datorită distorsiunii armonice sau intermodulare. Acest domeniu de 95dB indică că orice
componentă la o asemenea frecvenţă falsă are amplitudinea cu cel puţin 95dB sub domeniul
complet de intrare al plăcii.
Raportul zgomot-plus-distorsiunea totală armonică-supra-semnal (THD), care exclude
distorsiunea de intermodulare, este de 90dB de la 0 la 20kHz. Raportul THD este o măsură a
distorsiunii introduse într-un semnal datorită comportamentului neliniar al interfeţei de achiziţie.
Această distorsiune armonică apare sub formă de energie armonică adăugată spectrului pentru
fiecare dintre componentele cu frecvenţă de valori discrete prezente în semnalul de intrare.
Specificaţia ce indică un domeniu dinamic larg ale acestor plăci sunt datorate în mare
rezoluţiei convertorului ADC de 16 biţi. Figura 80 prezintă un grafic tipic al spectrului unui
semnal deţinut cu o placă cu domeniu dinamic de la NI, care conţine o componentă armonică cu

86
frecvenţă de 997 Hz. Se poate observa că armonicele semnalului de intrare de 997Hz, etajul de
zgomot şi alte frecvenţe false sunt sub nivelul de 95dB. Prin contrast, specificaţiile domeniului
dinamic pentru instrumentele de lucru de masă au un domeniu de la 70 la 80 dB, folosind
convertoare ADC de 12 şi 13 biţi.
Fig. 80 -Graficul spectral al familiei de plăci PCI-4450 cu o intrare de 997Hz la scală completă
(scală completă = 0dB)
11.9 Folosirea corectă a ferestrelor
a) Dispersia spectrală
Pentru o măsurătoare spectrală corectă, nu este suficient să se folosească tehnici adecvate
de achiziţie a semnalului pentru a avea un spectru foarte bine scalat, unilateral. Este posibil să se
întâlnească dispersie spectrală. Dispersia spectrală este rezultatul ipotezei din algoritmul FFT că
înregistrarea temporală se repetă în mod exact pe parcursul întregului timp şi că semnalele dintr-
o înregistrare temporală sunt astfel periodice, la intervale ce corespund lungimii înregistrării
temporale. Dacă această înregistrare are un număr ne-întreg de cicluri, ipoteza de la care s-a
plecat este încălcată şi apare dispersia spectrală. Un alt mod de a privi acest caz este acela că,
frecvenţa unei componente a semnalului ce nu este achiziţionat sub forma unui număr întreg de
cicluri nu corespunde exact celei a liniilor de frecvenţă ale spectrului.
Există doar două cazuri în care se poate garanta că vor fi mereu achiziţionate un număr
întreg de cicluri. Un caz este când se eşantionează în acelaşi timp cu semnalul care se generează
şi, se ia deliberat un număr întreg de cicluri. Un alt caz este dacă se capturează un semnal
tranzitoriu, care este conţinut complet în înregistrarea temporală. În marea majoritate a cazurilor
se măsoară un semnal necunoscut care este staţionar; adică semnalul este prezent înainte, în
timpul şi după achiziţie. În acest caz, nu se poate garanta eşantionarea unui număr întreg de
cicluri. Dispersia spectrală distorsionează măsurătoarea în aşa fel încât energia de la o
componentă de o frecvenţă dată este împrăştiată peste linii de frecvenţă sau intervale adiacente.
Se pot folosi ferestrele pentru a minimiza efectele realizării unei FFT asupra unui număr ne-
întreg de cicluri.
b) Strategii de alegere a ferestrelor

87
Fiecare tip de fereastră are caracteristicile ei şi ferestre diferite se folosesc pentru aplicaţii
diferite. Pentru a alege o fereastră spectrală trebuie “ghicit” conţinutul cu frecvenţă al
semnalului. Dacă semnalul conţine componente puternice cu frecvenţă de interferenţă depărtată
de frecvenţa de interes, se va alege o fereastră cu o rată mare de descreştere a lobului lateral.
Dacă semnalul conţine două sau mai multe componente armonice foarte apropiate unul de
celălalt în frecvenţă, este importantă rezoluţia spectrală. În acest caz, cel mai bine este să se
aleagă o fereastră cu un lob principal foarte îngust. Dacă acurateţea amplitudinii unei singure
componente în frecvenţă este mai importantă decât localizarea exactă a componentei într-un
interval de frecvenţă dat, se va alege o fereastră cu un lob principal lat. Dacă spectrul semnalului
este mai mult plat sau răspândit în bandă, se va folosi fereastra uniformă (nici o fereastră). În
general, fereastra Hann este satisfăcătoare în 95% din cazuri. Are o rezoluţie bună în frecvenţă şi
o dispersie spectrală redusă.
Fereastra cu vârf plat are o acurateţe bună a amplitudinii dar, fiindcă lobul principal este
lat, are o rezoluţie cu frecvenţa slabă şi mai multă dispersie spectrală. Fereastra cu vârf plat are
maximul lobului lateral mai mic decât la fereastra Hann, dar fereastra Hann are o rată de
descreştere mai rapidă. Dacă nu se cunoaşte natura semnalului dar se doreşte aplicarea unei
ferestre, este bine să se înceapă cu fereastra Hann.
Dacă se analizează semnale tranzitorii, cum sunt semnalele de impact şi răspuns, este mai
bine să nu se folosească ferestrele spectrale deoarece acestea atenuează informaţii importante
aflate la începutul blocului eşantion. Se pot folosi însă ferestrele forţă şi exponenţială. O fereastră
forţă este utilă la analizarea stimulilor de şoc fiindcă îndepărtează semnalele parazite de la
sfârşitul semnalului. Fereastra exponenţială este utilă la analizarea semnalelor de răspuns
tranzitorii fiindcă „domoleşte” finalul semnalului, asigurând că semnalul se atenuează total până
la sfârşitul blocului de eşantionare.
Ferestrele sunt folositoare la reducerea dispersiei spectrale atunci când se foloseşte FFT
pentru analiză spectrală. Totuşi, deoarece ferestrele sunt înmulţite domeniul-timp cu semnalul
achiziţionat, ele introduc propriile lor efecte de distorsiune. Ferestrele schimbă amplitudinea
totală a semnalului.
FFT poate fi văzută ca un set de filtre paralele, fiecare cu f lăţime de bandă. Datorită
efectului de împrăştiere al unei ferestre, fiecare fereastră măreşte lăţimea de bandă efectivă a
unui interval FFT cu o cantitate cunoscută ca lăţimea de bandă echivalentă zgomot-putere a
ferestrei. Puterea unui vârf de frecvenţă dat este calculat prin adăugarea intervalelor de frecvenţă
adiacente în jurul unui vârf.
Tabelul de mai jos prezintă factorii de scalare (sau amplificarea coerentă), lăţimea de
bandă echivalentă zgomot-putere şi acurateţea amplitudinii de vârf în cel mai rău caz datorită
componentelor din afara frecvenţei centrale, la cele mai cunoscute ferestre.
Fereastra Factor de scalare
(amplificare coerentă)
Lăţime de bandă
putere-zgomot
Eroarea amplitudinii
în cel mai rău caz
(dB)
Uniformă (nici una) 1.00 1.00 3.92
Hann 0.50 1.50 1.42
Hamming 0.54 1.36 1.75
Blackman-Harris 0.42 1.71 1.13
Exact Blackman 0.43 1.69 1.15

88
Blackman 0.42 1.73 1.10
Flat Top 0.22 3.77 < 0.01
11.10 Calcule pe baza spectrului
Când se cunoaşte amplitudinea sau spectrul de putere, se pot calcula mai multe
caracteristici utile ale semnalului, cum ar fi puterea şi frecvenţa, nivelul de zgomot şi densitatea
spectrală a puterii.
a) Estimarea puterii şi a frecvenţei
Dacă o componentă de frecvenţă se află între două linii de frecvenţă din spectrul calculat,
aceasta apare ca o energie împrăştiată printre liniile de frecvenţă adiacente, cu amplitudine
redusă. Vârful exact este între cele două linii ale frecvenţei.
Frecvenţa reală a unei componente cu frecvenţă discretă se poate estima până la o
rezoluţie mai mare decât f dată de FFT, prin realizarea unei medii ponderate a frecvenţelor din
jurul vârfului detectat din spectrul de putere.
unde j este indexul vârfului aparent pentru frecvenţa de interes şi N
Ff x
În mod similar, se poate estima puterea în Vrms2 a unei componente cu frecvenţa
discrete cu un vârf dat prin însumarea puterii din intervalele din jurul vârfului (calculând aria de
sub vârf).
De observat că această metodă este valabilă numai pentru spectrul format din componente
de frecvenţă discrete. Nu este valabilă pentru un spectru continuu. De asemenea, dacă două sau
mai multe vârfuri ale frecvenţei sunt la şase linii unul de celălalt sau mai apropiat, ele contribuie
la mărirea reciprocă a puterilor estimate şi la denaturarea frecvenţelor reale. Se poate reduce
acest efect prin scăderea numărului de linii cuprinse în calculele precedente. Dacă două vârfuri
sunt atât de aproape unul de celălalt, probabil că deja interferează unul cu celălalt datorită
dispersiei spectrale.
În mod similar, dacă se doreşte puterea totală dintr-un domeniu de frecvenţă dat, se va
aduna puterea din fiecare interval inclus în domeniul de frecvenţă şi împărţi la lăţimea de bandă
zgomot-putere a ferestrei.
b) Calcularea nivelului de zgomot şi a densităţii spectrale a puterii
Măsurarea nivelelor de zgomot depinde de lăţimea de bandă a măsurătorii. Atunci când
luăm în considerare etajul de zgomot al unui spectru de putere, luăm în considerare nivelul de
zgomot în bandă îngustă din fiecare interval FFT. Astfel, etajul de zgomot dintr-un spectru de
putere dat depinde de f al spectrului, care este, în schimb, controlat de rata de eşantionare şi
numărul de puncte. Cu alte cuvinte, nivelul de zgomot de la fiecare linie de frecvenţă se studiază
ca şi când ar fi măsurat printr-un filtru de f Hz centrat la acea linie de frecvenţă. Prin urmare,

89
pentru o rată de eşantionare dată, dublarea numărului de puncte achiziţionate reduce cu 3dB
puterea zgomotului, care apare în fiecare interval. Componentele cu frecvenţa discretă au, la
modul teoretic, lăţimea de bandă egală cu 0 şi, prin urmare, nu sunt dependente de numărul de
puncte sau domeniul de frecvenţă al FFT.
Pentru a calcula raportul semnal-zgomot SNR, se compară puterea de vârf la frecvenţele
de interes cu nivelul de zgomot în bandă lată. Acest nivel de zgomot se calculează în Vrms2 prin
însumarea tuturor intervalelor spectrului de putere, excluzând orice vârf şi componenta de DC,
apoi se împarte suma la lăţimea de bandă a zgomotului echivalent al ferestrei.
Datorită scalării nivelului de zgomot cu f, spectrul pentru măsurarea zgomotului este
deseori afişat într-un format normal numit putere sau densitate spectrală a amplitudinii. Acest
lucru normalizează puterea sau spectrul amplitudinii la un spectru care ar fi măsurat cu un filtru
de lăţime 1Hz, un obicei/o convenţie al măsurătorilor nivelului de zgomot. Nivelul la fiecare
linie de frecvenţă se citeşte astfel ca şi când ar fi fost măsurat printr-un filtru de 1Hz centrat la
acea linie de frecvenţă.
Densitatea spectrală a puterii se calculează astfel:
Unitatea de măsură este, prin urmare:.
Densitatea spectrală a amplitudinii este calculată astfel:
Unitatea de măsură este: .
Formatul densităţii spectrale este potrivit pentru semnale de zgomot sau semnale aleatorii,
însă nu este adecvat pentru semnal cu componentele având frecvenţa discretă deoarece, în mod
teoretic, aceasta din urmă are lăţimea de bandă 0.
11.11 Măsurarea reţelei bazată pe transformata Fourier Rapidă (FFT) Atunci când se întelege cum se fac calculele cu ajutorul FFT şi a spectrului de putere,
precum şi influenţa ferestrelor asupra spectrului, se pot calcula mai multe funcţii bazate pe FFT,
foarte folositoare pentru analiza reţelei. Acestea includ răspunsul în frecvenţă, răspunsul la
impuls şi funcţiile de coerenţă.
a) Spectrul de putere încrucişat

90
O mărime adiţională este spectrul de putere încrucişat. Acest spectru nu este folosit în
mod specific ca o măsurătoare directă, dar este un parametru important pentru alte măsurători.
Spectrul bilateral de putere încrucişat a două semnale în domeniul-timp A şi B se calculează
astfel:
Spectrul de putere încrucişat este într-o formă complexă bilaterală. Pentru a face
conversia la magnitudine şi fază, se foloseşte funcţia de conversie dreptunghiular-polar. Pentru a
converti la o formă unilaterală, se va folosi aceeaşi metodă descrisă mai sus, la capitolul
„conversia de la un spectru de putere bilateral la un spectru unilateral”. Unitatea de măsură
pentru forma unilaterală este în Vrms2 (sau altă cantitate).
Spectrul de putere este echivalent cu spectrul de putere încrucişat atunci când semnalele
A şi B sunt unul şi acelaşi semnal. Prin urmare, spectrul de putere mai este numit şi spectru de
auto-putere sau auto-spectru. Spectrul unilateral de putere încrucişat are amplitudinea egală cu
produsul amplitudinilor rms ale celor două semnale A şi B, şi faza egală cu diferenţa de fază
dintre cele două semnale.
Atunci când se ştie cum să se folosească aceste blocuri de bază, se pot calcula şi alte
funcţii utile, cum este funcţia de răspuns în frecvenţă.
b) Răspunsul în frecvenţă şi analiza reţelei
Există trei funcţii ce caracterizează răspunsul în frecvenţă al unei reţele, şi anume
răspunsul în frecvenţă, răspunsul la impuls şi funcţiile de coerenţă.
Răspunsul în frecvenţă unei reţele este măsurat prin aplicarea unui stimul reţelei, aşa cum
se vede în figura 81, şi apoi calcularea răspunsului în frecvenţă din stimul şi semnalul de răspuns.
Fig. 81 -Configuraţia pentru analiza reţelei
c) Funcţia de răspuns în frecvenţă (FRF)
Această funcţie are drept rezultat amplificarea şi faza versus frecvenţa unei reţele şi este
calculată după cum urmează:
unde A este semnalul-stimul şi B este semnalul de răspuns.
Funcţia de răspuns în frecvenţă este într-o formă complexă bilaterală. Pentru a face
conversia la amplificarea răspunsului în frecvenţă (magnitudinea) şi la faza răspunsului în
frecvenţă, se va folosi funcţia de conversie dreptunghiular-polar. Pentru a face conversia la
forma unilaterală, se va înlătura cea de-a doua jumătate a sistemului şi se va înmulţi cu 2 partea
rămasă de excepţia semnalului continuu.

91
Se poate să se folosească câteva valori ale funcţiei de răspuns în frecvenţă şi să se
medieze. Pentru a face acest lucru, se va face medierea spectrului de putere încrucişat SAB(f) prin
însumarea în formă complexă a mai multor spectre determinate succesiv, apoi împărţirea la
numărul de medieri, înainte de conversia la magnitudine şi fază, şi tot aşa. Spectrul de putere
SAA(f) este deja în formă reală şi este mediat normal.
d) Funcţia de răspuns la impuls
Această funcţie este reprezentarea domeniu-timp a funcţiei de răspuns în frecvenţă al
reţelei. Este semnalul de ieşire domeniu-timp generat atunci când se aplică un impuls intrării la
timpul t = 0.
Pentru a calcula răspunsul la impuls al unei reţele, se va calcula FFT inversă a funcţiei
bilaterale de răspuns al frecvenţei.
Rezultatul este o funcţie de domeniu-timp. Pentru a media mai multe valori, se va folosi
FFT inversă a funcţiei de răspuns în frecvenţă mediată.
e) Funcţia de coerenţă
Funcţia de coerenţă este folosită deseori împreună cu funcţia de răspuns în frecvenţă, ca
un indicator al calităţii măsurării funcţiei de răspuns în frecvenţă şi indică cât de multă energie a
răspunsului este corelată cu energia stimulului. Dacă mai există încă un semnal prezent în
răspuns, fie de la zgomotul excesiv, fie de la un alt semnal, calitatea măsurării răspunsului reţelei
este slabă. Funcţia de coerenţă se poate folosi pentru a identifica atât zgomotul în exces, cât şi
cauzalitatea, adică pentru a identifica care dintre sursele de semnal multiple au contribuit la
semnalul de răspuns. Funcţia de coerenţă se calculează astfel:
Rezultatul este o valoare aflată între 0 şi 1 versus frecvenţă. Valoarea zero pentru o linie
de frecvenţă dată indică că nu există nici o corelaţie între răspuns şi semnalul-stimul. Valoarea
unu pentru o linie de frecvenţă dată indică că energia răspunsului este datorată 100% semnalului-
stimul; cu alte cuvinte, nu există interferenţă la acea frecvenţă.
Pentru un rezultat corect, funcţia de coerenţă necesită medierea a două sau mai multe
valori ale semnalului stimul şi semnalului de răspuns. Pentru o singură valoare, se va înregistra
unitate la toate frecvenţele. Pentru a media spectrul de putere încrucişat SAB(f), se va media
forma complexă, apoi se va face conversia la magnitudine şi fază, aşa cum a fost descris mai sus.
Spectrele de auto-putere SAA(f) şi SBB(f) sunt deja în formă reală şi se vor media normal.
f) Sursele de semnal pentru măsurători ale răspunsului frecvenţei
Pentru a obţine măsurători bune ale răspunsului în frecvenţă, în domeniul frecvenţei de
interes trebuie să fie prezentă o energie semnificativă a stimulului. Două semnale uzuale folosite
sunt semnalul cu baleiere şi un semnal de zgomot în bandă lată. Semnalul baleiat este o sinusoidă

92
calculată pentru o frecvenţă ce variază între o frecvenţă de început şi până la o frecvenţă de
sfârşit, generând astfel energie de-a lungul unui domeniu de frecvenţă dat. Zgomotul alb şi cel
pseudo-aleator au un spectru al frecvenţei în bandă lată.
Este mai bine să nu se folosească ferestre atunci când se analizează semnalele de răspuns
în frecvenţă. Dacă se generează un semnal-stimul baleiat la aceeaşi rată la care se achiziţionează
răspunsul, se poate potrivi durata de achiziţie cu lungimea baleiată. Nici o fereastră nu reprezintă
o alegere potrivită pentru o sursă de semnal în bandă lată. Datorită faptului că unele semnale-
stimul nu sunt constante în frecvenţă de-a lungul înregistrării temporale, aplicarea unei ferestre
poate ascunde porţiuni importante ale răspunsului tranzitoriu.
11.12 Concluzii Sunt multe aspecte de luat în calcul atunci când se analizează şi măsoară semnalele unui
dispozitiv de achiziţie de date DAQ. Din păcate, este destul de uşor să se facă măsurători
spectrale incorecte. Înţelegerea calculelor de bază implicate în măsurătorile bazate pe FFT,
cunoaşterea modalităţilor de prevenire a fenomenului de anti-asociere, scalarea şi convertirea
corectă în unităţi diferite, alegerea şi folosirea corectă a ferestrelor şi învăţarea utilizării funcţiilor
bazate pe FFT pentru măsurători ale reţelei, toate aceste aspecte sunt foarte importante pentru
succesul analizei şi măsurării spectrului semnalelor.