Raport Tehnic Mecatronica in Tehnologia Auto
31
Mecatronica in Tehnologia Auto
-
Upload
diana-tudorache -
Category
Documents
-
view
58 -
download
1
Transcript of Raport Tehnic Mecatronica in Tehnologia Auto

Mecatronica in Tehnologia Auto

Cuprins
1.Introducere...............................................................................................................................................22.Rolul senzorilor in tehnologia auto..........................................................................................................2
2.1.Principii fundamentale......................................................................................................................2
2.2.Controlul puterii motorului...............................................................................................................4
2.3.Controlul aprinderii...........................................................................................................................5
2.4.Controlul debitului de aer..................................................................................................................5
2.5.Accelerometre...................................................................................................................................6
2.6.Senzori de pozitie fara contact..........................................................................................................6
2.7.Senzori pentru deplasari unghiulare..................................................................................................7
3.Managementul motorului.........................................................................................................................83.1.Probleme de baza privind managementul motorului.........................................................................8
3.2.Solutii constructive specifice............................................................................................................9
4.Transmisia automobilului mecatronic....................................................................................................114.1.Sisteme de comanda a transmisiilor................................................................................................12
4.2.Suspensia automobilului mecatronic...............................................................................................13
4.3.Sistemul de franare al automobilului mecatronic............................................................................14
5.Reglarea adaptiva a farurilor..................................................................................................................176.Concluzii................................................................................................................................................18Bibliografie................................................................................................................................................19
2

1.Introducere
Automobilul modern este unul dintre produsele mecatronice reprezentative si un exemplu de integrare software a componentelor mecanica, electronica, informatica. Importanta acestui produs in viata economica si sociala, ca si aportul la poluarea mediului, au stimulat cercetarile in domeniu pentru imbunatatirea performantelor functionale si a conditiilor de trafic . Pe aceasta linie se inscrie si initiativa
producatorilor de automobile din Europa, care din 1980, au lansat un program de cercetare comun numit
Prometeu .
Programul cuprinde obiective cu bataie lunga si urmareste sa creasca siguranta in exploatare a automobilelor cu 30% si eficientizarea traficului cu 20%. Abordarea mecatronica s-a dovedit a fi solutia salvatoare. Cateva solutii bazate pe tehnologia mecatronica sunt demne de mentionat. Astfel, imbunatatirea vizibilitatii pe timp de noapte sau pe timp de ceata, solutie bazata pe ultraviolete, controlul navigatiei, capabil sa mentina o distanta sigura intre masini, in situatii de urgenta, afisarea indicatiilor instrumentelor de bord pe parbriz, sistemul automat de parcare etc.
Tendinta actuala este de a construi sisteme informationale distribuite in produse. Folosind retele de transmitere a datelor, toate activitatile inteligente pot fi integrate in produse. De exemplu, sistemul de management al automobilului integreaza in prezent toate functiile de monitorizare si control altadata independente: controlul injectiei combustibilului,servodirectia, controlul temperaturii motorului, detectarea obstacolelor, controlul transmisiei etc.
Unii producatori de automobile au inceput sa colaboreze cu producatorii de echipament electronic. In urma acestei colaborari a aparut sistemul RACS Road-Automobile Comunication Systems) capabil sa ofere conducatorilor auto informatii cu privire la trafic, starea vremii, afisarea traseului dorit, ghidarea spre o anumita destinatie , rezervarea si plata locului de parcare si a taxelor de drum etc.
Este important de amintit faptul ca strategia de trecere de la vanzarea produselor (echipamente pentru automobile sau comunicatie) la instalarea de sisteme (de exemplu RACS) si furnizarea de noi servicii clientilor este posibila numai daca in produse este implementata, la un inalt nivel, tehnologia informatiei. Senzorii sunt elementele de baza pentru accesarea informatiei din produse.
2.Rolul senzorilor in tehnologia auto
2.1.Principii fundamentale
In automobilul clasic este folosit, in general, un numar limitat de senzori, in special pentru controlul vitezei, indicatori de nivel pentru combustibil, indicatori pentru presiunea uleiului, senzori de temperatura . Datele furnizate de acesti senzori sunt afisate pe indicatoarele de bord, astfel incat soferul sa poata monitoriza situatiasi, daca este necesar, sa poata interveni pentru a face corecturi le necesare.
Tendinta, actuala este ca automobilul sa includa cat mai multi , senzori conectati la un sistem controlat de un microprocesor, inlocuind controlul uman. Astfel, sistemul de control al automobilului poate sa monitorizeze un numar mare de parametri si sa efectueze corecturile necesare pentru o functionare optima. In linii mari, parametrii monitorizati sunt: consumul de combustibil si emisia de gaze, sistemul de directie, franele, confortul, respectiv culegerea de informatii necesare pentru corectarea erorilor si conducerea in siguranta a vehiculului.
3

Cercetarea si dezvoltarea senzorilor utilizati pentru aceste scopuri este focalizata pe crearea de senzori mici ca dimensiuni, siguri si ieftini, utilzarea microprocesoarelor pentru prelucrarea datelor, crearea de senzori inteligenti, etc.
De asemenea, se evita monitorizarea inutila a mai multor parametri recurgandu-se la metode alternative. De exemplu, controlul functionarii cutiei de viteze realizat cu senzori de vibratii a fost inlocuit de un senzor acustic cu ajutorul caruia se monitorizeaza zgomotele caracteristice schimbarilor bruste de viteza.
Automobilul modern, ca produs mecatronic include in structura sa mai multe module cu relativa autonomie functionala, cum ar fi: managementul motorului, managementul transmisiei, sistemul de franare, managementul sasiului (suspensia activa), sistemul de climatizare, sistemul de reglare adaptiva a farurilor, sistemul de siguranta. In tabelul 2.1 se prezinta o sistematizare a principalelor tipuri de senzori incorporati in structura unui automobil modern.
Tabelul 2.1 – Principalele tipuri de senzori incorporati instructura unui automobil modern
Parametru fizic Aplicatie Tipul senzorului
Pozitie Pozitia pedalei de acceleratie
Pozitia clapei de inchidere
Pozitia schimbatorului de viteze
Pozitia valvei
Supapa hidraulica a schimbatorului de viteze
Potentiometru
Potentiometru
Intrerupator cu came
Potentiometru
Optic incremental
Gaz de esapament Oxigen evacuat (ardere incompleta)
Senzori cu dioxid de zirconiu
Temperatura Temperatura mediului
Temperatura lichidului de racire
Temperatura motorinei
Temperatura aerului in conducta de aspiratie
Temperatura aerului evacuat
Termistor
Termistor
Termistor
Film metalic sau semiconductor
Termocuplu CrAl
Presiunea a)Presiunea aerului in conducta de aspiratie
b)Presiunea aerului evacuat
Presiunea barometrica absoluta
Presiunea uleiului
Capacitiv sau membrana de silicon (pentru a si b)
Membrana de silicon
Transformator diferential cu membrana
Debit de aer Debitul aerului in conducta de Contor cu paleta au
4

aspiratie anemometru cu fir cald
Acceleratia Accelerare sau franare Accelerometru piezoelectric sau servo
Viteza unghiulara Viteza in viraje Giroscop cu laser, efect Coriolis
Turatia Turatia arborelui cotit
Turatia rotilor
Radar cu ultrasunete, senzori cu reluctanta variabila
Efect Hall, tahogenerator
2.2.Controlul puterii motorului
Efectul apasarii sau eliberarii pedalei de acceleratie poate fi simtit fie prin variatia momentului la axul motorului fie prin variatia presiunii gazelor. In cazul autovehiculelor, deplasarile unghiulare ale arborilor, rezultate in urma modificarii momentului sunt dificil de masurat de aceea, in multe cazuri se prefera masurarea variatiilor de presiune. Presiunea gazului este masurata cu ajutorul unui traductor cu membrana din silicon si elemente piezorezistive (figura 2.2.1)
Acestea din urma raspund la variatiile de presiune prin producerea unui potential electric, fiind de asemenea sensibile la modul de aliniere. In cazul in care sunt utilizate patru astfel de elemente intr-un singur traductor, ele sunt aranjate astfel incat sa formeze o punte Wheatstone, tensiunea de iesire fiind direct proportionala cu variatia presiunii.
Figura 2.21 – Traductor pentru masurarea variatiilor de presiune
5

2.3.Controlul aprinderii
Controlul in bucla inchisa al aprinderii combustibilului are ca scop reglarea momentului aprinderii atunci cand s-a obtinut amestecul corect de oxigen si vapori de combustibil. Se realizeaza astfel o economie de combustibil, arderea completa a acestuia si, de asemenea, reducerea emisiilor de gaze nocive. Sincronizarea este deci importanta pentru aceasta operatie , rezultatele cele mai bune fiind obtinute prin considerarea pozitiei arborelui cotit ca element de referinta. In acest scop sunt deseori folositi senzorii pe baza de efect Hall si cei cu reluctanta variabila.
Nu toti producatorii de autovehicule utilizeaza acest sistem pentru control arderii complete a combustibilului si reducerea emisiilor de gaze. Legislatia europeana incurajeaza in prezent folosirea convertoarelor catalitice, ca o solutie mai eficace, dar mai scumpa, pentru reducerea poluarii.
Senzorii cu reluctanta variabila sunt amplasati deasupra rotilor dintate la o distanta de 0,6 mm (figura 2.3.1)
Trecerea dintilor prin dreptul senzorului are ca efect modificarea fluxului magnetic si deci aparitia unui semnal de iesire (tensiune electromotoare) care permite apoi calcularea vitezei rotii. Pe o scara mai larga sunt folositi senzorii pe baza de efect Hall datorita avantajelor pe care le prezinta: acuratete mai mare, distanta dintre roata si senzor poate avea valori mai mari si posibilitatea de a detecta viteze extrem de mici.
Fig. 2.3.1 – Senzor cu reluctanta variabila
2.4.Controlul debitului de aer
Masurarea debitului de aer prin galeria de aspiratie este importanta pentru controlul arderii combustibilului. Aceasta operatie este realizata cu ajutorul unui contor cu paleta (figura 2.4.1). Deplasarea masei de aer prin conducte are ca efect oscilatia unei palete legata de cursorul unui potentiometru. Tensiunea obtinuta la bornele potentiometrului este proportionala cu deplasarea paletei.
In acelasi scop, se mai utilizeaza anemometre cu fir cald, la care un fir de platina este incalzit si expus curentului de aer din conducte.
6

Figura 2.4.1 – Masurarea debitului de aer
2.5.Accelerometre
Accelerometrele care masoara fortele verticale si orizontale rezultate in urma acceleratiei au o larga aplicatie in controlul suspensiilor, franelor, sistemului de directie si airbag.
In acest scop sunt utilizati senzori pe baza de cristale piezoelectrice si/sau accelerometre servo (figura 2.5.1). Deplasarea unei mase m, datorita acceleratiei, este sesizata de un sistem optic, fiind aplicata o forta de reactiune pentru a anula aceasta deplasare. Curentul electric necesar pentru producerea acestei forte este proportional cu acceleratia.
Figura 2.5.1 Accelerometru servo
2.6.Senzori de pozitie fara contact
Nevoia de a evita frecarile si uzura a condus la dezvoltarea senzorilor fara contact, conceputi astfel incat sa functioneze perfect pe toata durata utilizarii automobilului.
Transformatorul liniar diferential este un dispozitiv des folosit in acest scop (figura 2.6.1). In principal este compus dintr-o infasurare primara si doua infasurari secundare, separate si in opozitie de faza. Un miez din material feromagnetic se poate deplasa in interiorul acestor bobine. Daca miezul feromagnetic este fix, tensiunile din cele doua infasurari secundare sunt nule. In functie de directia de
7

deplasare a miezului, in cele doua infasurari secundare iau nastere tensiuni a caror valoare este proportionala cu marimea deplasarii. Se pot masura astfel deplasari liniare mici, pentru valori mai mari, dependenta dintre tensiune si deplasare nemaifiind liniara.
.
Figura 2.6.1 Transformator diferential liniar
2.7.Senzori pentru deplasari unghiulare
In afara de deplasarea in fata sau in spate, curbe, urcarea sau coborarea pantelor, automobilele pot avea si deplasari unghiulare (figura 8.48). Giroscoapele clasice, utilizate in industria aerospatiala, pentru masurarea acestor deplasari, sunt mult prea scumpe si greu de implementat la automobile. De aceea, ca metode alternative, se utilizeaza, sisteme de detectie cu laser, dispozitive piezoelectrice,
sau senzori bazati pe efectul Coriolis. Toti acesti senzori, desi provin tot din industria aerospatiala, sunt mai usor de integrat in structura automobilelor, pentru ca necesita o precizie de pozitionare mai redusa si accesorii mai ieftine.
Figura.1.6.1 Miscarea automobilului dupa cele 3 axe:x,y,z.
8

3.Managementul motoruluiAcest modul asigura controlul tuturor parametrilor care influenteaza performantele functionale
ale motorului.
Este important de subliniat ca, din punct de vedere constructiv, motorul automobilului mecatronic are o structura modulara. Modulele componente sistemul de alimentare, sistemul de aprindere, sistemul de racire, sistemul de ungere, etc. , au o relativa autonomie functionala. In motorul automobilului traditional aceste module sunt componente ale unui lant cinematic antrenat de la arborele motor asa cum se arata in figura 3.1.
Figura 3.1 – Structura motorului automobilului traditional
Este usor de inteles ca in acest caz nu se poate interveni asupra unei componente din lantul cinematic pentru a-i modifica parametrii functionali.
O alta particularitate constructiva, vizeaza motoarele pe benzina. Tot mai frecvent, sistemele de alimentare cu carburator sunt inlocuite cu sisteme pe baza de injectie. Aprinderea electronica este o componenta comuna in ambele situatii.
3.1.Probleme de baza privind managementul motorului
Functionarea sistemului se bazeaza pe culegerea si prelucrarea informatiilor de la senzori incorporati in motor, prelucrarea acestor informatii si transmiterea comenzilor catre actuatori, pentru a realiza corecturile care se impun. Acest proces este sugestiv evidentiat in figura 3.1.1
9

Figura3.1.1 – Schema principiala a sistemului de management al motorului
3.2.Solutii constructive specifice
Senzorii incorporati in motor, permit masurarea temperaturii, momentului de torsiune la arborele motor, turatiei, presiunii din cilindrii etc. Semnalele de la acesti senzori sunt prelucrate de unitatea electronica de comanda, apoi comparate cu datele inscrise in memorie, rezultand astfel comenzile pentru reglajul corect al aprinderii. Unitatea electronica de comanda (ECU) contine unul sau mai multe microprocesoare, memorii, circuitele de conditionare a semnalelor, filtre, amplificatoare de putere etc.
Unul dintre avantajele acestor sisteme este reprezentat de faptul ca functionare a aprinderii nu este influentata de uzura altor componente, ca la sistemele exclusiv mecanice.
Figura.3.2.1-Sistem de reglare electronica a aprinderii
10

Exista astfel de sisteme de control si pentru motoarele cu injectie directa de combustibil. Diferenta intre variantele existente in prezent este determinata de modul in care este masurat debitul de aer din galeria de aspiratie. In continuare este prezentata varianta constructiva care utilizeaza masurarea indirecta, cu senzori de presiune.
In acest caz, cantitatea de aer introdusa in motor, pentru o anumita pozitie a clapetei de aceleratie, depinde de presiunea din galeria de aspiratie. Aceasta este masurata de un senzor care trimite semnale unitatii electronice de control (ECU) indicand cantitatea de aer care intra in motor. Acest semnal este prelucrat de ECU pentru a determina cat timp trebuie sa ramana deschis injectorul.
Momentul injectiei de combustibil este determinat de contactele distribuitorului sau de semnalul unui senzor amplasat in apropierea arborelui cotit. Pentru motoarele cu sase cilindri, injectoarele opereaza cate trei odata.
Elementul cel mai important al acestor sisteme este unitatea electronica de control. Aceasta primeste semnalele de la diversi senzori, si dupa ce le compara cu instructiunile stocate in memorie, este capabila sa asigure o buna functionare a intregului sistem de injectie.
Figura.3.2.2-Sistem electronic de injectie al combustibilului
11

4.Transmisia automobilului mecatronic
In structura unui automobil, transmisia include un ansamblu de mecanisme care asigura transmiterea controlata a fluxului energetic de la motor la sistemul de rulare al automobilului. Principial, modulele de baza care includ aceste mecanisme sunt: ambreiajul, cutia de viteze, transmisia cardanica si puntea motrica. In functie de tipul automobilului, transmisia poate include una sau mai multe punti motrice.
Cutia de viteze este o componenta a transmisiei care asigura adaptarea vitezei de deplasare a automobilului la conditiile de trafic.
Schema de principiu a unei cutii de viteze clasice este prezentata in figura 4.1
Figura. 4.1. – Schema de principiu a unei transmisii clasice.
In componenta acesteia se disting: arborele primar, arborele secundar, arborele intermediar si cuplaj ele. Rotile dintate de pe arborele secundar sunt libere. Fixarea lor se realizeaza prin deplasarea cuplajelor, ca urmare a comenzilor transmise prin maneta de schimbare a vitezelor.
In exemplul prezentat, prin fixarea rotii G se obtine raportul de transmitere:
i =(ZF/ZE)(ZG/ZH) = (40/20)(30/25) = 2,4 corespunzator treptei a III-a de viteza.
Cutia de viteza prezentata permite obtinerea a patru viteze pentru mersul inainte si a unei viteze pentru mersul inapoi.
12

4.1.Sisteme de comanda a transmisiilor
Transmisiile automobilelor moderne sunt, in general, transmisii hibride, cel mai adesea hidromecanice. Schema cinematica principiala a unei astfel de transmisii este prezentata in figura 4.1.1.
Figura.4.1.1 – Schema de principiu a unei transmisii hibride
In componenta acesteia se disting: ambreiajul si amplificatorul de cuplu hidraulic, cuplajele CI, C2, franele FI, F2 si cutia de viteze cu angrenaje planetare.
Ambreiajul hidraulic decupleaza automat cutia de viteze in cazul in care turatia motorului scade sub limita admisa, respectiv o cupleaza treptat in cazul in care turatia motorului creste.
Selectarea treptei de viteza dorite se realizeaza prin blocarea sau deblocarea uneia sau a mai multor roti din angrenajul planetar, cu ajutorul franelor si/sau cuplajelor actionate hidraulic.
Transmisiile hidromecanice pot fi comandate direct, prin intermediul manetei schimbatorului de viteze si a unui circuit hidraulic de comanda sau automat. Indiferent de gradul de automatizare, aceste sisteme de comanda trebuie sa poata realiza tot ceea ce poate asigura un sistem de transmisie clasic, comandat de un conducator auto experimentat. Adica trebuie sa se poata adapta la diferitele conditii de drum, sa permita demarajul cu acceleratie mare sau mica, precum si schimbarea treptelor de viteze in functie de conditiile de trafic.
Schimbarea treptelor de viteze, la sistemele automate, are loc la momente bine stabilite si se poate realiza in functie de viteza automobilului sau in functie de viteza automobilului si de sarcina motorului.
Astfel, un senzor cu reluctanta variabila care monitorizeaza turatia arborelui secundar al cutiei de viteze si un senzor atasat clapetei de acceleratie transmit semnale referitoare la viteza si la sarcina motorului unitatii de comanda si control, care comanda cuplaj ele si /sau franele, in vederea selectarii treptei de viteza optime (figura 4.1.2).
13

Fig.4.1.2-Schema de principiu a sistemului automat de schimbare a vitezelor
4.2.Suspensia automobilului mecatronic
Suspensia este o componenta importanta, de a carei functionare depind in buna masura confortul in deplasarea cu automobilul si stabilitatea acestuia.
Suspensia clasica (pasiva) din structura automobilului traditional este alcatuita, in principal, din arcuri si amortizoare (figura 4.2.1)
Fig. 4.2.1 – Suspensia automobilului clasic
Sistemele de suspensie activa se deosebesc de cele clasice prin faptul ca rolul arcurilor si amortizoarelor este preluat de actuatori hidraulici, pneumatici sau combinatii ale acestora, comandati de microprocesoare, pe baza semnalelor primite de la diversi senzori. Un astfel de sistem este prezentat in figura 4.2.2
14

Figura. 4.2.2. Schema de principiu a sistemului de suspensie activa
Semnalele provenite de la senzorii care masoara deplasarea relativa a rotii fata de sasiu, viteza si acceleratia acesteia, precum si incarcarea si unghiul de inclinare al automobilului sunt trimise unitatii de comanda. Aceasta prelucreaza semnalele, pe baza unui algoritm predefinit, rezultatul fiind controlul presiunii in fiecare actuator in vederea obtinerii unei stabilitati optime a automobilului, indiferent de conditiile de drum.
4.3.Sistemul de franare al automobilului mecatronic
Sistemele ABS (anti-Iock brake system) din componenta automobilului modern permit obtinerea unei distante minime de franare si asigurarea unei stabilitati optime a autovehicolului pe orice tip de drum. Aceasta se realizeaza prin controlul fortei de franare, pentru a evita blocarea rotilor in timpul franarii .
Stabilitatea in timpul franarii este o conditie esentiala pentru evitarea derapajelor. La sistemele de franare clasice, fara ABS, (figura 4.3.1) aceasta se realizeaza prin mijloace exculsiv mecanice (reglarea franelor, sisteme de compensare, etc.). De asemenea, pentru o franare eficienta, axa din fata a autovehiculului trebuie franata inaintea celei din spate. Ca rezultat, chiar daca franarea are loc sub limita de blocare, distanta de oprire este mare deoarece axa din spate este sub limita de franare.
Figura 4.3.1 Sistemul clasic
15

In timp ce primele variante de ABS erau construite ca module separate ultimele generatii de ABS sunt incorporate in sistemul hidraulic de franare al automobilului. Astfel, sunt posibile atat franarea normala, cat si cea in sistem ABS.
In figura 4.3.2 se prezinta principalele elemente componente ale sistemului ABS. Acesta cuprinde doua subsisteme: hidraulic si electronic.
Figura 4.3.2 – Principalele parti componente ale sistemului ABS
Componentele hidraulice pentru sistemele ABS sunt construite sub forma modulara fiind atasate cilindrului principal actionat de pedala de frana. La capatul acestui cilindru este montat un servo cilindru hidraulic alimentat cu lichid de frana de o pompa electrica, la o presiune cuprinsa intre 140 si 180 bari. Un rezervor-tampon acumuleaza lichidul si elimina variatiile de presiune de la iesirea din pompa.
Partea electronica este alcatuita din senzori si unitatea electronica de control (ECU). Pe fiecare roata este montat un senzor cu reluctanta variabila, care detecteaza viteza de rotatie. Semnalele de la senzori sunt prelucrate de cele doua microprocesoare ale unitatii electronice. Acestea compara permanent semnalele primite la un moment dat cu cele primite anterior. Daca se detecteaza faptul ca una dintre roti tinde sa se blocheze (in urma franarii), atunci este actionata o supapa de evacuare din circuitul de franare, astfel incat presiunea sa scada pana la valoare admisa. Prin monitorizarea a 8.000 de semnale pe secunda si avand
capacitatea de a lua decizii in cateva milisecunde, unitatile de comanda sunt capabile sa asigure antiblocarea franelor si de asemenea stabilitatea vehicolului indiferent de conditiile de drum.
In functie de numarul senzorilor, exista doua tipuri de ABS: cu trei, respectiv cu patru canale. La prima varianta, rotile din fata au senzori si circuite de franare separate, putand fi controlate individual. La rotile din spate exista un singur circuit de franare si doi senzori, reglarea fiind facuta in functie de roata care se , blocheaza mai usor. La varianta cu patru canale, fiecare roata poate fi franata separat de celelalte, avantajul fiind stabilitatea mai buna in timpul franarii.
16

In functionarea sistemului ABS, pe un circuit cu trei canale se inregistreaza urmatoarele faze:
A - reducerea presiunii;
B - mentinerea presiunii;
C - cresterea presiunii.
In figura 4.3.3 este prezentata schema de principiu a unui astfel se sistem.Lichidul de frana este pompat continuu in circuitul hidraulic. De la pompa, el trece prin servomotorul hidraulic si cilindrul principal, fiind apoi recirculat.
Figura. 4.3.3 – Sistem ABS pe trei canale
Faza A - cand un senzor indica ca una dintre roti tinde sa se blocheze, ECU inchide supapa de intrare si o deschide pe cea de evacuare rezultamd scaderea presiunii din circuitul respectiv si reducerea riscului blocarii rotii ; surplusul de lichid rezultat este pompat in rezervorul tampon,iar la intrarea in functiune a ABS, ECU deschide distribuitorul principal, lichidul sub presiune din servocilindru putand intra in camera de presiune, pe langa inelul de etansare al cilindrului principal; in acest mod se echilibreaza presiunea lichidului recirculat prin intermediul supapei de evacuare si totodata se asigura presiunea necesara in circuitele de franare din fata, presiune proportionala cu forta de apasare a pedalei de frana
Faza B - cand ECU detecteaza scaderea presiunii la un nivel suficient pt evitarea blocarii rotilor, se inchide supapa de evacuare, presiunea mentinandu-se const. in circuit
Faza C – cand senzorul indica o rotire libera a rotii, supapa de intrare din circuitul respectiv este deschisa rezultand o crestere a presiunii
OBS: acest ciclu de reglare a presiunii se repeta de 12 ori pe secunda pentru evitarea vibratiilor rotilor si suspensiei
17

5.Reglarea adaptiva a farurilor
Sistemele de reglare a farurilor au aparut ca o necesitate, tinand cont de faptul ca orice vehicul cu suspensie, la o incarcare asimetrica isi modifica pozitia fata de planul orizontal. Aceasta modificare se regaseste tocmai in unghiul pe care lumina farurilor il face cu suprafata drumului.
Pentru ca acest fenomen sa poata fi evitat, este necesara o reglare adecvata a pozitiei farurilor. Primele sisteme de reglare erau exclusiv mecanice, cu parghii sau cremaliera si presupuneau ca reglarea sa se faca din exteriorul automobilului. Au urmat variantele hidraulice si pneumatice unde reglarea se !acea din interior, prin intermediul unei pompe si a unor pistonase cu care erau prevazute farurile. Urmatorul pas in domeniu l-a constituit introducerea sistemului electric, cu motoare pas cu pas.
Aceasta ultima varianta s-a dovedit a fi cea mai fiabila, fiind intens utilizata in prezent de producatorii de autovehicule. Cu timpul, aceste reglaje au fost complet automatizate, reglajele fiind realizate de microprocesoare pe baza semnalelor primite de la senzori.
Un exemplu de sistem electronic de reglare a pozitiei farurilor este prezentat in figura 5.1
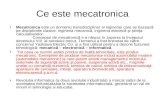
Actionand reostatul, soferul poate realiza o reglare adecvata a farurilor, prin intermediul motoarelor pas cu pas si a senzorilor potentiometrici. Pentru a imbunatati reglajul si a-l face independent de preferintele soferului, s-a dezvoltat varianta de reglaj cu senzori care determina incarcarea masinii si pendule gravitationale.
Figura 5.1 – Reglarea automata a pozitiei farurilor
Astfel, un pendul gravitational furnizeaza infonnatii privind inclinarea masinii unui microprocesor. Aceste date sunt corelate cu cele primite de la senzorii de incarcare, aflati pe axa din spate a autovehicolului, stabilindu-se astfel o pozitie optima a farurilor. Aceste operatii sunt efectuate la fiecare pornire a masinii si periodic pe parcursul drumului.
Un sistem mai perfonnant utilizeaza patru senzori care detennina incarcarea pe fiecare roata in parte. Acest sistem poate fi implementat numai pe autovehicule dotate cu suspensii active. Are insa avantajul ca pennite reglarea individual a farurilor tinand cont de incarcarea de pe toate cele patru roti. Dupa
18

pornire, se realizeaza o reglare preliminara a pozitiei farurilor, functie de incarcare si pozitia masinii, se face o evaluare a conditiilor meteo si a vizibilitatii. Daca este cazul, farurile sunt automat aprinse, iar pe parcursul drumului se evalueaza perioadic inclinarea masinii, reglandu-se corespunzator farurile.
In paralel cu reglajul pe verticala a aparut preocuparea pentru o mai buna vizibilitate in curbe, deci necesitatea reglarii pozitiei farurilor si pe orizontala. Solutia gasita consta in atasarea unui senzor de rotatie pe axul volanului, si a doi senzori pe maneta de semnalizare. De aici se culeg informatii despre eventua-dorinta a soferului de a schimba directia de mers si orientarea acesteia. Analizand aceste informatii, un microprocesor comanda aprinderea unor faruri multifunctionale, cu mai multe becuri, realizandu-se astfel o iluminare asimetrica, dar optima in curbe.
Exista si varianta de far la care in jurul becului se afla un sistem de oglinzi. Prin rotirea corespunzatoare a acestora se poate obtine, de asemenea, iluminare asimetrica .
6.Concluzii
Pana in jurul anilor 1970-1980 componentele mecanice, multe dintre ele adevarate „bijuterii” tehnice, reprezentau o pondere covarsitoare,iar partea electrica si electronica rezumandu-se la un numar restrans de motoare (demaror, alternator, stergatoare de parbriz), senzori (pentru temperatura uleiului si antigelului, presiunea uleiului, nivelul carburantului), relee (pentru semnalizare, aprindere) si becuri .
Dezvoltarea microelectronicii, materializata in circuite integrate logice si analogice, circuite integrate de putere, procesoare numerice (microprocesoare, microcontrollere, DSP-uri), realizarea unor sisteme de actionare, conventionale si neconventionale, performante, a unor tipuri noi de senzori au deschis perspective largi pentru rezolvarea unor cerinte care se impuneau tot mai acut, legate de:
Siguranta in trafic
Economicitate
Fiabilitate
Confort
Protectia mediului
In constructia automobilelor moderne si-au castigat locul tot mai multe sisteme mecatronice , aceste reusind sa sporeasca atat controlul asupara automobilului si placerea de a conduce
19

Bibliografie
1. Ciocirlea-Vasilescu, A., Constantin. Mariana, Asamblarea, intretinerea si repararea masinilor si instalatiilor. Editura AU Educational, Bucuresti, 2003.
3. Ciocirlea-Vasilescu, A., Constantin, Mariana, Asamblari si transmisii mecanice, Editura Cvasi-documentalia PROSER & Priniech Bucuresti, 2007.
4. Draghici, I. si colab.. Calculul si constructia cuplajelor, Editura Tehnica, Bucuresti, 1978.
5. Enciclopedia tehnica ilustrata, traducere din limba germana. Bucuresti, Editura Teora, 1999.
9. Marginean, V., Teodorescu, D., Utilajul si tehnologia constructiilor mecanice. Editura Didactica si Pedagogica, Bucuresti, 1981.
10. Micu, C. Dodoc, P., Diaconcscu, Gh., Manolcscu. A.M., Aparate si sisteme de masurare in constructii de masini. Editura Tehnica, Bucuresti, 1980.
11. Popovici, C. Si colab. Tehnologia constructiilor de masini. Editura Didactica si Pedagogica, Bucuresti. 1967.
12. Rabinovioi, I. si colab., Rulmenti, Editura Tehnica, Bucuresti, 1977.
14. Sandulescu. I.. Bucur. S., Repararea si intretinerea masinitor-unelte. Editura Tehnica, Bucuresti, 1966.
15. Tcodorescu, D., Utilajul si tehnologia constructiilor metalice. Editura Didactica si Pedagogica, Bucuresti, 1978.
16. Zgura, Gh. si colab.. Utilajul si tehnologia lucrarilor mecanice. Editura Didactica si Pedagogica, Bucuresti, 1980.
17. Zgura, Gh-, si colab.. Utilajul si tehnologia lucrarilor mecanice, Editura Didactica si Pedagogica, Bucuresti, 1989.
20