RAPORT DE CERCETARE 2011 (Selectie) - eii.pub.roeii.pub.ro/filescontracte/contractpn-2/Raport de...
73
Raport de Cercetare 2011 - 1 Contract de cercetare CNCSIS – UPB tip PN – II – ID – PCE – 2008 – 2 cod ID_1693 Universitatea POLITEHNICA Bucuresti (UPB) Facultatea de Electronica, Telecomunicatii si Tehnologia Informatiei (ETTI) Catedra de Electronica Aplicata si Ingineria Informatiei (EAII) Disciplina Electronica si Informatica Industriala (EII) RAPORT DE CERCETARE 2011 (Selectie) Titlul contractului: OPTIMIZAREA ENERGETICĂ ŞI FUNCłIONALĂ A CONVERTOARELOR ELECTRONICE DE PUTERE PRIN METODE ŞI SISTEME AVANSATE DE INTELIGENłĂ ARTIFICIALĂ Echipa de cercetare a contractului: Nr. crt. Nume si prenume Titlul didactic / stiintific Doctorat Locul de munca 1. FLORESCU Adriana – director de proiect Conferentiar DA U.P.B., Fac.ETTI 2. RADOI Constantin – membru echipa cercetare Profesor conducator de doctorat (doctoranzi: Rosu Stefan, Stocklosa Octavian, Savu Andrei, Oros Claudiu, Teodorescu Mihail) DA U.P.B., Fac.ETTI 3. STOICHESCU Dan Alexandru – membru echipa cercetare Profesor conducator de doctorat (doctoranzi: Stefanescu Valentin, Bogdan Florea) DA U.P.B., Fac.ETTI 4. STANCIU Dumitru – membru echipa cercetare Conferentiar/ CS gradul I DA U.P.B., Fac.ETTI 5. STOCKLOSA Octavian - membru echipa cercetare Cercetator Drd.ing SC EAST Electric SRL 6. ROSU Stefan George - membru echipa cercetare Cercetator As.drd. ing U.P.B., Fac.ETTI Bucuresti decembrie 2011
-
Upload
truongkhuong -
Category
Documents
-
view
237 -
download
2
Transcript of RAPORT DE CERCETARE 2011 (Selectie) - eii.pub.roeii.pub.ro/filescontracte/contractpn-2/Raport de...

Raport de Cercetare 2011 - 1
Contract de cercetare CNCSIS – UPB tip PN – II – ID – PCE – 2008 – 2 cod ID_1693
Universitatea POLITEHNICA Bucuresti (UPB) Facultatea de Electronica, Telecomunicatii si Tehnologia Informatiei (ETTI)
Catedra de Electronica Aplicata si Ingineria Informatiei (EAII) Disciplina Electronica si Informatica Industriala (EII)
RAPORT DE CERCETARE 2011 (Selectie)
Titlul contractului:
OPTIMIZAREA ENERGETICĂ ŞI FUNCłIONALĂ A CONVERTOARELOR ELECTRONICE DE PUTERE PRIN METODE ŞI SISTEME AVANSATE DE
INTELIGENłĂ ARTIFICIALĂ Echipa de cercetare a contractului:
Nr. crt.
Nume si prenume Titlul didactic / stiintific
Doctorat Locul de munca
1. FLORESCU Adriana – director de proiect
Conferentiar DA U.P.B., Fac.ETTI
2. RADOI Constantin – membru echipa cercetare
Profesor conducator de doctorat (doctoranzi: Rosu Stefan, Stocklosa Octavian, Savu Andrei, Oros Claudiu, Teodorescu Mihail)
DA U.P.B., Fac.ETTI
3. STOICHESCU Dan Alexandru – membru echipa cercetare
Profesor conducator de doctorat (doctoranzi: Stefanescu Valentin, Bogdan Florea)
DA U.P.B., Fac.ETTI
4. STANCIU Dumitru – membru echipa cercetare
Conferentiar/ CS gradul I DA U.P.B., Fac.ETTI
5. STOCKLOSA Octavian - membru echipa cercetare
Cercetator Drd.ing SC EAST Electric SRL
6. ROSU Stefan George - membru echipa cercetare
Cercetator As.drd. ing
U.P.B., Fac.ETTI
Bucuresti decembrie 2011

Raport de Cercetare 2011 - 2
CUPRINS
1. LISTA OBIECTIVELOR SI A ACTIVITATILOR ANULUI 2011
2. TOPOLOGII DE CONTROL UTILIZATE IN SISTEMELE DE COMANDA SI
REGLARE A TURATIEI MOTOARELOR DE C.C.
3. BAZA MATEMATICĂ A UNOR CONVERTOARE DE C.C. UTILIZATE ÎN SRA A
TURAłIEI MOTOARELOR DE C.C.
4. PROIECTAREA RF FOLOSIND MODELUL DE INFERENłĂ TIP MAMDANI
PENTRU CONVERTOARELE DE C.C.
5. PROIECTAREA RF FOLOSIND MODELUL SUGENO DE INFERENTA FUZZY, PRIN
METODA INTERPOLARII. COMPARATIE CU RF REALIZAT CU MODELUL
MAMDANI. OPTIMIZAREA PROIECTARII RF PRIN UTILIZAREA SE.
6. PROIECTAREA REGULATORULUI NEURO-FUZZY (RNF). COMPARAREA
PERFORMANTELOR RNF CU CELE ALE RF NEANTRENAT SI ANTRENAT DE
ANFIS. OPTIMIZAREA PROIECTARII RNF PRIN UTILIZAREA SE.
7. CONCLUZII. DIRECłII NOI DE CERCETARE
Raport de Cercetare 2011 - 3
1. LISTA OBIECTIVELOR SI A ACTIVITATILOR ANULUI 2011
Lista obiectivelor specifice (OS) si a activitatilor (obiectivelor derivate - OD) ale anului 2011
din planul de realizare (Anexa IIa a Contractului de Finantare) este urmatoarea:
• OS1-2011. Implementarea software a algoritmului de comanda si control pe modelul pilot
experimental functional
OD1.1. Insusirea limbajului de programare
OD1.2. Elaborarea programului de comanda si control
OD1.3. Efectuarea propriuzisa a implementarii
• OS2-2011. Experimente pe modelul pilot functional, inclusiv pentru alte variante hibride
OD2.1. Experimentarea activitatii 2/2009 (Simulari Simulink, MatLab folosind Toolbox-urile
specifice de IA de tip fuzzy, neuro-fuzzy algoritmi genetici etc)
OD2.2. Elaborarea si a altor programe pentru alte variante hibride
OD2.3. Evaluarea calitativa a rezultatelor experimentale obtinute
• OS3-2011. Alegerea variantei optime dintre metodele hibride de IA propuse
OD3.1. Sinteza rezultatelor activitatii 3/2009 (Propuneri de optimizari prin metode teoretice
hibride ca urmare a activitatii 2/2008 - Cercetari fundamentale ale unor tipuri de convertoarelor
electronice de putere cu posibila comanda si control prin metode de IA, finalizate printr-un
raport de cercetare)
OD3.2. Alegerea variantei optime
OD3.3. Studiu calitativ critic in vederea gasirii de noi posibilitati de optimizare
• OS4-2011. Evaluarea interna finala
OD4.1. Evaluarea rezultatelor finale
OD4.2. Elaborarea raportului de cercetare care sa contina inclusiv directii noi de cercetare
plecand de la rezultatele obtinute
OD4.3. Pregatirea documentatiei necesare pentru inregistrarea brevetului la OSIM; studiul
posibilitatii de brevetare internationala
• OS5-2011. Diseminarea rezultatelor obtinute
OD5.1. Carti si articole in edituri, reviste, conferinte ISI
OD5.2. Participarea/organizarea de seminarii si conferinte pentru gasirea potentialilor parteneri
straini in propuneri de contracte internationale
OD5.3. Propunerea de noi teme pentru doctoranzi si infiintarea unui laborator de cercetare nou
pe baza echipamentelor si fondurilor primite in cadrul contractului international UPB-HP
Europe in curs de derulare
Obiectivele si activitatile sunt prezentate in Sinteza Lucrarii_2011 ce poate fi accesata de pe site-
urile unitatii finantatoare: www.idei-cdi.ro si al contractului: www.eii.pub.ro

Raport de Cercetare 2011 - 4
2. TOPOLOGII DE CONTROL UTILIZATE IN SISTEMELE DE COMANDA SI REGLARE A TURATIEI MOTOARELOR DE C.C. 2.1. GENERALITATI PRIVIND MOTOARELE DE C.C.
Masinile electrice realizeaza conversia energiei electrice in energie mecanica debitata la arbore prin intermediul campului magnetic creat de inductor (regimul de motor) sau energia mecanica primita pe la arbore in energie electrica debitata la borne (regimul de generator). Majoritatea masinilor electrice sunt reversibile, adica pot lucra atat in regim de generator cat si in regim de motor. Mai exista in plus regimul de franare, cand masina primeste energie electrica pe la borne si mecanica pe la ax, pe care le transforma ireversibil in caldura in rotor (spira rotorica). Motorul de c.c. se caracterizeaza prin posibilitatea simpla de reglare a turatiei intr-un raport foarte mare al valorilor extreme: 1:5000, 1:10000 sau chiar mai ridicat. Constructiv, acest tip de motor prezinta pe stator un sistem de magneti permanenti sau infasurari alimentate in c.c. cu rol de producere a campului magnetic de excitatie. Rotorul, construit intr-o gama foarte larga de variante (cu crestaturi, cilindric, cu intrefier axial, cu bobina mobila), este prevazut cu mai multe infasurari ce sunt alimentate de la o sursa de c.c. prin intermediul unor lamele colectoare izolate intre ele si plasate rigid pe rotor, circulatia curentului electric facandu-se prin contactul mecanic al acestora cu doua perii fixe. Principalele avantaje ale acestui tip de motor sunt legate de comportamentul liniar sI simplitatea controlului turatiei:
• cuplu de pornire foarte mare; • caracteristica mecanica (cuplu – turatie) liniara; • caracteristica de reglaj liniara in raport cu tensiunea de alimentare a indusului; • raport cuplu/gabarit ridicat; • capacitatea de supraincarcare mare; • inertie relativ redusa. Dezavantajele motorului de c.c. in varianta clasica sunt date de comutarea mecanica a
curentului prin infasurarile rotorice si de constructia ansamblului perii – lamele colectoare: • fiabilitate scazuta; • functionare zgomotoasa; • existenta descarcarilor electrice la ruperea circulatiei curentului prin sectiunile rotorice
datorita comutatiei mecanice, ceea ce atrage existenta parazitilor electromagnetici si imposibilitatea utilizarii motorului in medii cu pericol de explozie;
• posibilitatea redusa de racire a motorului datorita faptului ca sursa de caldura (indusul) este pe rotor;
• turatii maxime relativ scazute (tipic 3600 rpm). Varianta de motor de c.c. cu excitatie prin magneti permanenti se caracterizeaza prin
randament mai mare, gabarit mai mic, fiabilitate sporita, liniaritate mai buna a caracteristicii de reglaj, variatie mica a inductivitatii indusului cu sarcina si probleme de racire mai simple. Totusi, in prezent exista tendinta de renuntare la varianta clasica a motorului de c.c. (cu perii si lamele colectoare plasate pe rotor) si inlocuire cu motorul de c.c. cu comutatie statica, fara perii, datorita dezavantajelor legate de sistemul mecanic de comutatie a sectiunilor infasurarii rotorice.
In actionarile electrice, cea mai utilizata metoda de reglare a vitezei motorului de c.c. este cea prin comanda tensiunii de alimentare a circuitului rotoric cu mentinerea constanta a fluxului de excitatie. Utilizarea in prezent aproape in exclusivitate a acestei metode este justificata de urmatoarele aspecte importante:
♦ confera masinii caracteristici mecanice si de reglaj liniar; ♦ motoarele de c.c.actuale se construiesc in varianta cu excitatie prin magneti permanenti,
datorita avantajelor mentionate mai sus.

Raport de Cercetare 2011 - 5
2.2. STRUCTURI DE CONTROL A TURATIEI MOTOARELOR DE C.C. Sistemele de reglaj automat (SRA) utilizate in actionarile de c.c. cu servomotoare de
constructie clasica sau fara perii, au in componenta doua bucle de reglaj principale, anume bucla
exterioara pentru controlul turatiei si bucla interioara pentru controlul curentului. Bucla pentru controlul turatiei necesita si controlul curentului absorbit de masina electrica necesar limitarii acestuia pentru a nu periclita bobinajele de cupru si recomandat pentru aplicatiile in care masina electrica este comandata in curent, cum ar fi tractiune, actionarea rolelor de laminor, sisteme de pozitionare etc.
Din punct de vedere topologic, cele doua bucle de reglaj pot fi dispuse in doua configuratii de baza:
1. structura de reglaj serie (in cascada); 2. topologia de reglaj paralel. 2.2.1. Structura de reglaj serie Schema bloc principiala a unui SRA a turatiei in topologie serie este prezentata in fig.1. Ea contine cele doua regulatoare de baza atasate buclelor de reglare a turatiei si
reglare/limitare a curentului: 1.regulatorul de turatie (RT), care are ca intrare eroarea de turatie:
ωε = impω - citω , (1)
unde impω - turatia de referinta impusa si citω - turatia curenta citita cu ajutorul unui traductor de
turatie (TT). Pe baza erorii de turatie ωε , in functie de legea de control pe care o implementeaza, RT
furnizeaza la iesire imp,ai - curentul rotoric de referinta impus pentru bucla de control interna a
curentului prin indusul servomotorului. Deoarece curentul indusului nu trebuie sa depaseasca o anumita valoare limita in timpul
functionarii motorului (valoare impusa de regimul termic al motorului si/sau de saturatia circuitului magnetic), curentul rotoric de referinta va fi in prealabil limitat. In regim tranzitoriu, valoarea reala a curentului poate avea un suprareglaj de ordinul 5%-10%, accesta nefiind periculos pentru functionarea sistemului.
2.regulatorul de curent (RC), care are ca intrare eroarea de curent:
iε = imp,ai - cit,ai , (2)
unde imp,ai -curentul rotoric de referinta impus si cit,ai -valoarea curenta citita de traductorul de
curent (TC). Ca principiu, RC functioneaza asemanator cu RT, putand implementa, desigur, o alta lege de control. Marimea de iesire are in acest caz semnificatia unei referinte de tensiune pentru convertorul de putere (de tip ca-cc sau cc-cc), cu rol de EE, ce alimenteaza cu tensiunea au
circuitul indusului.
Fig.1. Structura serie de reglaj al turatiei

Raport de Cercetare 2011 - 6
In cazul aplicatiilor de inalta performanta (precizie mare de reglare a turatiei obtinuta intr-un timp scurt de prelucrare a calculatorului), pentru a se asigura o comportare statica si dinamica buna a intregului SRA, trebuie liniarizate caracteristicile intrare-iesire ale fiecarui bloc functional. De aceea, se impune si liniarizarea caracteristicii externe a convertorului de putere, ca bloc component a SRA. Pentru aceasta, se introduce o a treia bucla de reglaj in cadrul structurii SRA serie, plasata pe nivelul ierarhic cel mai mic, cu rol de control a tensiunii medii furnizate la iesirea convertorului de putere. Ea contine regulatorul de liniarizare (RL) a caracteristicii externe a convertorului care actioneaza in regimul de functionare cu curent intrerupt prin sarcina (motor).
Ca exemplu de topologie de reglare serie cu realizare practica, vom prezenta in continuare schema bloc generala de reglare in cascada a turatiei si curentului unui motor de cc cu magnet permanent. Proiectarea porneste de la modelele matematice ale blocurilor componente SRA si a sarcinii (motorul de c.c.), pentru ca in final sa se analizeze stabilitatea intregului SRA matematic:
1. cu transformata z; 2. prin simulare pentru diverse turatii ale motorului, folosind programul PSpice de simulare
prin metoda de mediere in spatiul vectorilor de stare sau metoda de mediere PWM de tip
“switch” a convertorului). Sarcina convertoarelor din cadrul SRA fiind motorul de c.c. cu excitatie prin magneti
permanenti, modelul matematic al acestuia se deterrmina scriind ecuatiile de functionare ale acestuia din care rezulta functia de transfer.
2.2.1.1. Ecuatiile de functionare ale motorului de c.c. cu magnet permanent S-a folosit o masina de c.c. (tip EA511), care functioneaza in regim de motor alimentat la o
tensiune de 24V, absorbind un curent maxim de 2A, avand montat pe ax ca sarcina o alta masina de c.c. (tip EA244) care functioneaza in regim de generator, alimentat la o tensiune de 16V. Generatorul este folosit ca frana electromagnetica, facand sa varieze cuplul rezistiv Crez la axul
motorului. Un motor cu magnet permanent are schema echivalenta din fig.2. Elementele circuitului rotoric sunt: ua - tensiunea de alimentare a circuitului rotoric, ca marime de intrare in sistem;
Ra - rezistenta circuitului rotoric;
La - inductanta proprie totala a circuitului rotoric;
e - t.e.m. indusa prin rotatie in una din caile de curent ale infasurarii rotorice; ia - curentul din circuitul de alimentare (circuitul rotoric), care poate fi considerata o
marime intermediara a sistemului; ω - viteza unghiulara de rotatie a rotorului, ca marime de iesire a sistemului.
Fig.2. Schema echivalenta a unui motor de c.c. cu magnet permanent
Ecuatiile in regim tranzitoriu ale motorului de c.c. cu magnet permanent, la care fluxul de
excitatie φ este constant, se obtin aplicand teorema II Kirchoff circuitului de alimentare a motorului si legea echilibrului cuplurilor care intervin in functionarea acestuia:
dt
diLiReu aaaaa ++=
(3)
ωeKe = (4)
Raport de Cercetare 2011 - 7
rezamm Cdt
dJiKC +
ω== , (5)
unde Ke=keφ; Km=kmφ - constantele de proportionalitate ale motorului; mC - cuplul motor si
Crez - cuplul rezistiv al motorului, care este marimea perturbatoare.
Eliminand variabilele intermediare e si ia din ecuatiile (3)÷(5), rezulta ecuatia generala de
functionare a motorului de c.c.:
rezaammea2
2
a CRuKKKdt
dJR
dt
dJL −=ω+
ω+
ω . (6)
Aceasta ultima ecuatie arata ca motorul se comporta ca un element de intarziere de ordinul II. Regimul stationar de functionare a motorului se obtine facand dω/dt=0 in ecuatia (6). Rezulta:
)C,u(fCKK
R
K
urezarez
me
a
e
a =−=ω , (7)
aratand cum turatia depinde liniar de marimea de intrare ua si de marimea perturbatoare Crez.
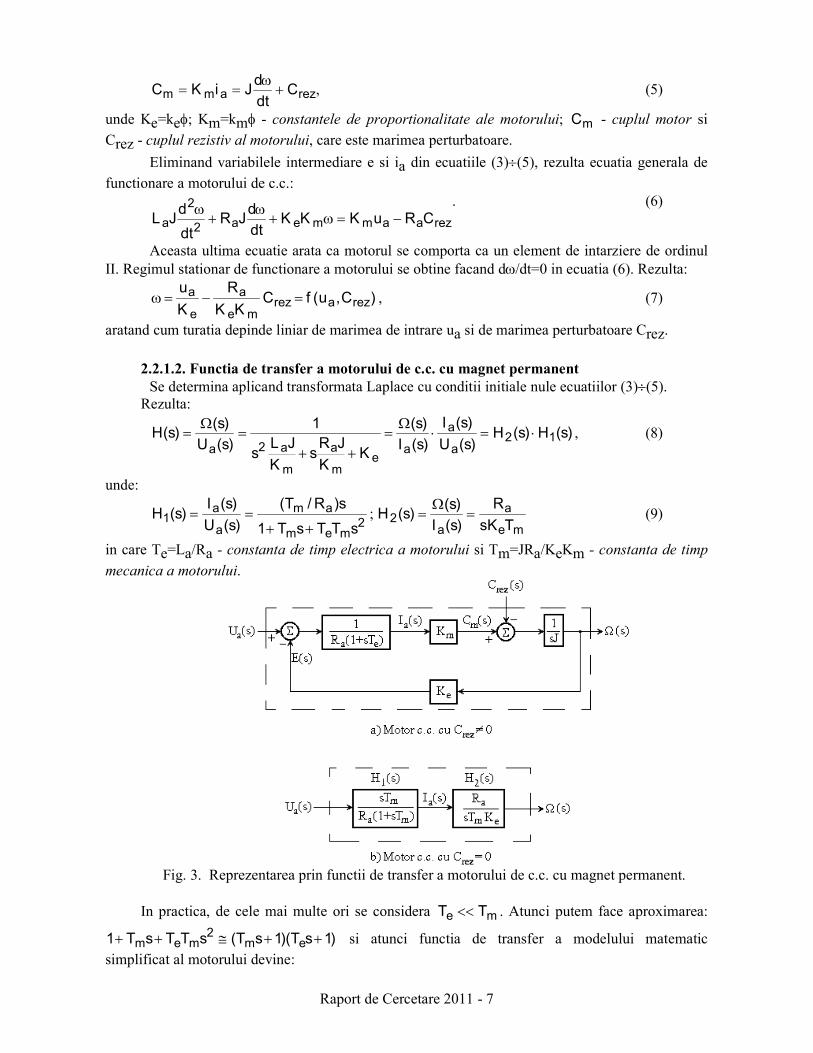
2.2.1.2. Functia de transfer a motorului de c.c. cu magnet permanent Se determina aplicand transformata Laplace cu conditii initiale nule ecuatiilor (3)÷(5). Rezulta:
)s(H)s(H)s(U
)s(I
)s(I
)s(
KK
JRs
K
JLs
1
)s(U
)s()s(H 12
a
a
ae
m
a
m
a2a
⋅=⋅Ω
=++
=Ω
= , (8)
unde:
2
mem
am
a
a1
sTTsT1
s)R/T(
)s(U
)s(I)s(H
++== ;
me
a
a2
TsK
R
)s(I
)s()s(H =
Ω= (9)
in care Te=La/Ra - constanta de timp electrica a motorului si Tm=JRa/KeKm - constanta de timp
mecanica a motorului.
Fig. 3. Reprezentarea prin functii de transfer a motorului de c.c. cu magnet permanent.
In practica, de cele mai multe ori se considera me TT << . Atunci putem face aproximarea:
)1sT)(1sT(sTTsT1 em2
mem ++≅++ si atunci functia de transfer a modelului matematic
simplificat al motorului devine:
Raport de Cercetare 2011 - 8
m
m
m
e
em
e
sT1
K
1sT
K/1
)1sT)(1sT(
K/1)s(H
+=
+=
++= . (10)
Cunoscand datele de catalog ale motorului, se poate determina functia sa de transfer H(s), necesara in procesul de reglare a turatiei.
Schema bloc de reprezentare prin functii de transfer intermediare a motorului este prezentata in fig. 3.a si b, care sunt echivalente.
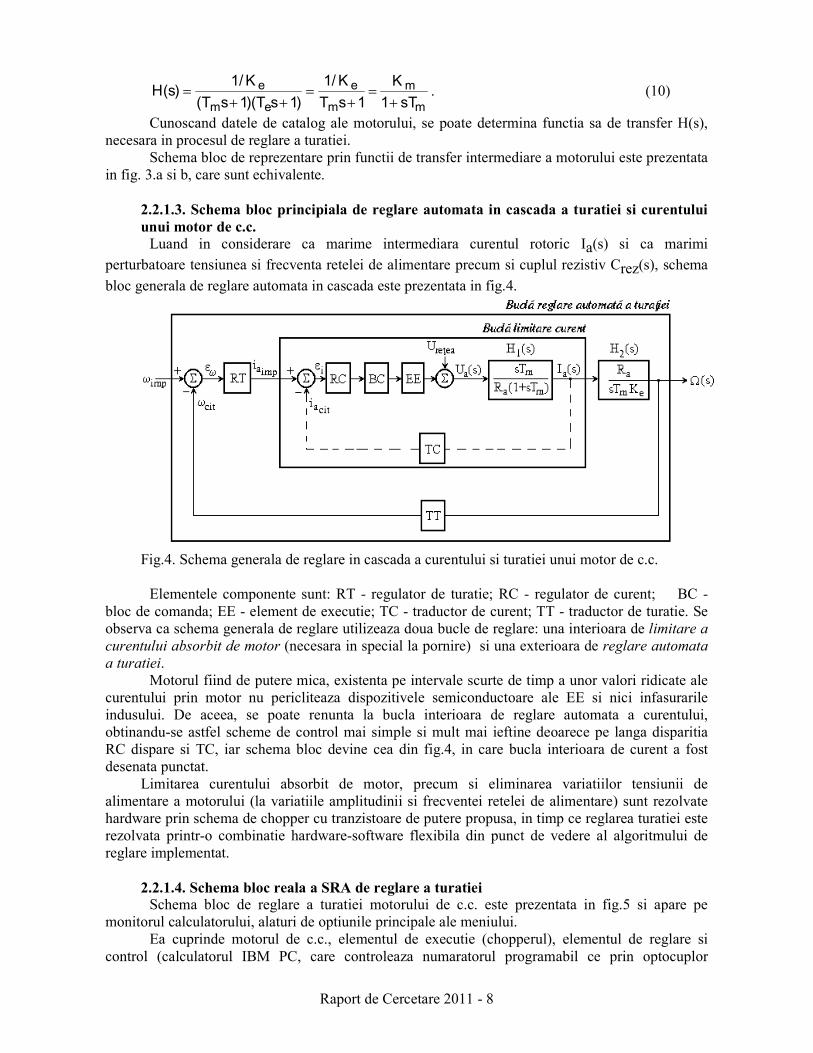
2.2.1.3. Schema bloc principiala de reglare automata in cascada a turatiei si curentului unui motor de c.c. Luand in considerare ca marime intermediara curentul rotoric Ia(s) si ca marimi
perturbatoare tensiunea si frecventa retelei de alimentare precum si cuplul rezistiv Crez(s), schema
bloc generala de reglare automata in cascada este prezentata in fig.4.
Fig.4. Schema generala de reglare in cascada a curentului si turatiei unui motor de c.c. Elementele componente sunt: RT - regulator de turatie; RC - regulator de curent; BC -
bloc de comanda; EE - element de executie; TC - traductor de curent; TT - traductor de turatie. Se observa ca schema generala de reglare utilizeaza doua bucle de reglare: una interioara de limitare a
curentului absorbit de motor (necesara in special la pornire) si una exterioara de reglare automata
a turatiei. Motorul fiind de putere mica, existenta pe intervale scurte de timp a unor valori ridicate ale
curentului prin motor nu pericliteaza dispozitivele semiconductoare ale EE si nici infasurarile indusului. De aceea, se poate renunta la bucla interioara de reglare automata a curentului, obtinandu-se astfel scheme de control mai simple si mult mai ieftine deoarece pe langa disparitia RC dispare si TC, iar schema bloc devine cea din fig.4, in care bucla interioara de curent a fost desenata punctat.
Limitarea curentului absorbit de motor, precum si eliminarea variatiilor tensiunii de alimentare a motorului (la variatiile amplitudinii si frecventei retelei de alimentare) sunt rezolvate hardware prin schema de chopper cu tranzistoare de putere propusa, in timp ce reglarea turatiei este rezolvata printr-o combinatie hardware-software flexibila din punct de vedere al algoritmului de reglare implementat.
2.2.1.4. Schema bloc reala a SRA de reglare a turatiei Schema bloc de reglare a turatiei motorului de c.c. este prezentata in fig.5 si apare pe
monitorul calculatorului, alaturi de optiunile principale ale meniului. Ea cuprinde motorul de c.c., elementul de executie (chopperul), elementul de reglare si
control (calculatorul IBM PC, care controleaza numaratorul programabil ce prin optocuplor
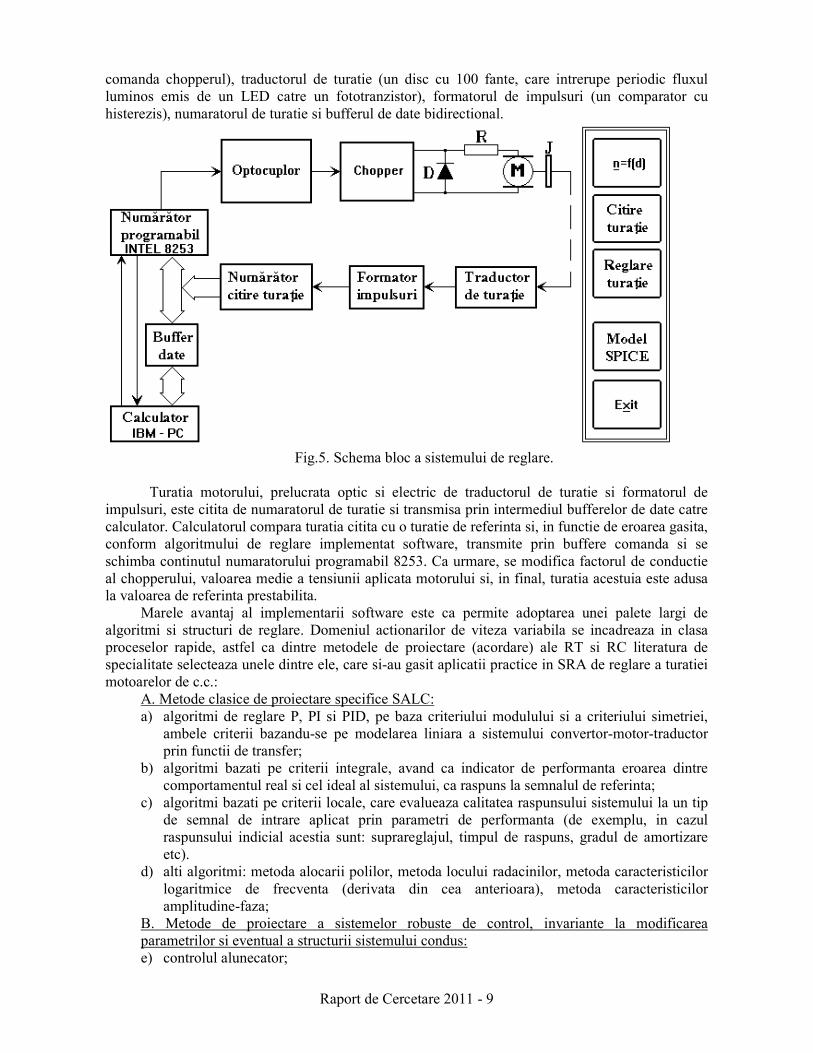
Raport de Cercetare 2011 - 9
comanda chopperul), traductorul de turatie (un disc cu 100 fante, care intrerupe periodic fluxul luminos emis de un LED catre un fototranzistor), formatorul de impulsuri (un comparator cu histerezis), numaratorul de turatie si bufferul de date bidirectional.
Fig.5. Schema bloc a sistemului de reglare.
Turatia motorului, prelucrata optic si electric de traductorul de turatie si formatorul de
impulsuri, este citita de numaratorul de turatie si transmisa prin intermediul bufferelor de date catre calculator. Calculatorul compara turatia citita cu o turatie de referinta si, in functie de eroarea gasita, conform algoritmului de reglare implementat software, transmite prin buffere comanda si se schimba continutul numaratorului programabil 8253. Ca urmare, se modifica factorul de conductie al chopperului, valoarea medie a tensiunii aplicata motorului si, in final, turatia acestuia este adusa la valoarea de referinta prestabilita.
Marele avantaj al implementarii software este ca permite adoptarea unei palete largi de algoritmi si structuri de reglare. Domeniul actionarilor de viteza variabila se incadreaza in clasa proceselor rapide, astfel ca dintre metodele de proiectare (acordare) ale RT si RC literatura de specialitate selecteaza unele dintre ele, care si-au gasit aplicatii practice in SRA de reglare a turatiei motoarelor de c.c.:
A. Metode clasice de proiectare specifice SALC: a) algoritmi de reglare P, PI si PID, pe baza criteriului modulului si a criteriului simetriei,
ambele criterii bazandu-se pe modelarea liniara a sistemului convertor-motor-traductor prin functii de transfer;
b) algoritmi bazati pe criterii integrale, avand ca indicator de performanta eroarea dintre comportamentul real si cel ideal al sistemului, ca raspuns la semnalul de referinta;
c) algoritmi bazati pe criterii locale, care evalueaza calitatea raspunsului sistemului la un tip de semnal de intrare aplicat prin parametri de performanta (de exemplu, in cazul raspunsului indicial acestia sunt: suprareglajul, timpul de raspuns, gradul de amortizare etc).
d) alti algoritmi: metoda alocarii polilor, metoda locului radacinilor, metoda caracteristicilor logaritmice de frecventa (derivata din cea anterioara), metoda caracteristicilor amplitudine-faza;
B. Metode de proiectare a sistemelor robuste de control, invariante la modificarea parametrilor si eventual a structurii sistemului condus: e) controlul alunecator;

Raport de Cercetare 2011 - 10
f) control cu observatori de stare; g) control fuzzy neadaptiv; C. Metode de proiectare a sistemelor de control adaptiv pentru reglajul vitezei: h) control adaptiv cu autoacordare; i) control adaptiv cu model de referinta. 2.2.2. Structura de reglaj paralel Schema bloc principiala a unui SRA a turatiei in topologie paralel este prezentata in fig.6.
Fig.6. Structura paralel de reglaj al turatiei functionand pe baza strategiei de tip minim
Spre deosebire de structura serie, RT si RC lucreaza cvasiindependent, nemaiexistand o
ierarhie fixata prin constructia hardware a SRA. Ca trasatura specifica structurii de reglaj paralel este faptul ca la un moment dat este in
actiune doar o singura bucla de control, marimea de comanda a convertorului de putere fiind fixata direct de regulatorul buclei respective.
In cadrul acestei structuri, rolul buclei de reglaj al curentului este doar de limitator, nemaiputandu-se face un reglaj continuu, permanent al curentului si implicit al cuplului dezvoltat motor. Ca urmare, referinta buclei de curent este fixata la o valoare limita imp,ai , pe care curentul
prin indus nu trebuie sa o depaseasca. Aplicatiile specifice sunt in robotica, tractiune electrica etc. Validarea, la un moment dat, a functionarii unei anumite bucle de control se face utilizand o
strategie de comutare, aleasa in conformitate cu aplicatia in cauza, si anume: 1.Strategia de tip minim
Pentru simplitate, se presupune ca RT si RC furnizeaza la iesire actiuni de control
incrementale (reprezentand variatii in marimea de comanda y a convertorului), notate ccy ,
respectiv scy . Principiul acestei strategii consta in compararea acestor doua marimi si alegerea
celei mai mici dintre ele pentru a forma marimea de comanda a convertorului. Presupunand o dependenta liniara a tensiunii furnizate de convertor au in functie de marimea de comanda y, se
poate scrie:
( )∑⋅== n0 sccca cy,cyminKyKu , (11)
unde n este momentul curent de esantionare, iar cK este castigul convertorului.
Prin alegerea la fiecare moment de esantionare a comenzii de variatie minima ( )sc cy,cymin ,
variatia de tensiune de la iesirea convertorului nu va duce la depasirea valorii limita fixata imp,ai a
curentului. Depasirea acestei valori ar fi posibila numai in cazul in care ar functiona doar bucla de
Raport de Cercetare 2011 - 11
viteza, deoarece aceasta nu are un control direct asupra curentului indus. Intr-o astfel de situatie ( imp,aa ii > ), RC va sesiza depasirea pragului imp,ai , furnizand la iesire o comanda in sensul
scaderii tensiunii de la iesirea convertorului, comanda de variatie mai mica decat cea calculata de RT si care va fi validata conform startegiei de tip minim.
2. Strategia bazata pe anticiparea curentului prin indus In decursul intervalelor de timp in care curentul prin indus este departe de valoarea limita
prescrisa, se afla in functiune bucla de control a turatiei. Considerandu-se cunoscuti modelul si parametrii motorului, sistemul evolueaza, insa, la fiecare perioada de esantionare valoarea viitoare a curentului prin indus ce poate sa apara ca urmare a comenzii date de RT. In situatia in care valoarea astfel anticipata a curentului depaseste limita prescrisa, se valideaza bucla de control a curentului, iesirea din acest mod de lucru si revenirea la controlul turatiei facandu-se imediat ce curentul a scazut sub pragul imp,ai .
Structurile de control paralel isi gasesc aplicatii in SRA a vitezei motoarelor de c.c. actionate de convertoare c.c.-c.c cu functionare in 4 cadrane si convertoarele c.a.-c.c. cu bucla PLL.
2.2.3. Comparatie intre structurile de reglaj serie si paralel Facand o analiza comparativa a structurilor de reglare paralel in raport cu cele serie, se
constata o usoara incarcare a unitatii de calcul (in cazul implementarilor cu procesor sau microcontroler) si o comportare dinamica mai buna la modificarea inertiei sarcinii, aspecte ce recomanda structura de control paralel pentru sistemele de actionare foarte rapide. Dezavantajul acestei structuri este ca ea nu poate asigura controlul permanent al curentului prin motor ci numai o limitare a sa, caz in care se recomanda structura de reglaj serie.
3. BAZA MATEMATICĂ A UNOR CONVERTOARE DE C.C. UTILIZATE ÎN SRA A TURAłIEI MOTOARELOR DE C.C.
Clasa convertoarelor de c.c. cuprinde convertoare c.a.-c.c. (redresoare) şi convertoare c.c.-c.c. Motoarele de c.c. pot fi alimentate cu unul dintre aceste tipuri de convertoare de c.c.
În fig.7 se propune schema bloc generală de SRA a turaŃiei motoarelor de c.c. în topologie serie modificată, în sensul introducerii pe lângă buclele principale ce conŃin RT şi RC a celei de-a treia bucle interne rapidă ce conŃine RL a caracteristicii externe a convertorului de c.c. S-a ales ca EE un redresor comandat prin unghiul de comandă optimα , generat de RC şi modificat de RL.
MenŃionăm că structura schemei rămâne valabilă şi în cazul alimentării motorului de c.c. cu variatoare de c.c (o subclasă a convertoarelor c.c.-c.c.), doar că mărimea de comandă a convertorului nu mai este unghiul de comandă α ci raportul de conducŃie D.
Se observă că deşi structura SRA a rămas aceeaşi, locul regulatoarelor convenŃionale a fost luat de regulatoarele fuzzy pentru controlul turaŃiei (RFT), al curentului (RFC) şi de liniarizare a
caracteristicii externe (RFL). Justificarea acestei alegeri sunt acŃionările practice de motoare de c.c. de ultimă oră care au arătat că, prin inlocuirea regulatoarelor clasice de tip PI sau PID cu regulatoare proiectate prin logică fuzzy, creşte imunitatea întregului SRA la variaŃiile parametrice şi parametrii de performanŃă specifici răspunsului indicial în regimul tranzitoriu se îmbunătăŃesc simultan.
De regulă, în proiectare atenŃia se concentrează asupra RFT şi RFC. S-a demonstrat că RFT şi RFC au o structură asemănătoare în ceea ce priveşte baza de reguli, diferenŃa constând în modul de alegere a seturilor fuzzy corespunzătoare mărimilor de intrare şi de ieşire. Atât RFT cât şi RFC furnizează mărimea de comandă sub formă incrementală, calculată în funcŃie de eroarea de la intrare şi derivata acesteia.

Raport de Cercetare 2011 - 12
Fig.7. Schema bloc a unui SRA realizat cu RF
Studiile au fost concentrare asupra proiectării RFL, care are rolul de a modifica (creşte/scade)
unghiul de comandă α al tiristoarelor din redresor (furnizat de RFC) cu valoarea ∆ α corespunzătoare modificării curentului prin motor (scade/creşte), rezultând α∆±α=αoptim .
Ştiind că turaŃia motorului este direct proporŃională cu valoarea medie a tensiunii cu care acestă este alimentat, comanda motorului se face prin controlul cu ajutorul unghiului α a valorii medii αdU a tensiunii instantanee αdu obŃinută la ieşirea redresorului comandat care alimentează
motorul de c.c.
3.1. REDRESORUL TRIFAZAT COMANDAT CU PUNCT MEDIAN 3.1.1. Expresia matematică a caracteristicii externe a redresorului trifazat cu punct median având ca sarcină un motor de c.c.
Schema din fig.8 este detalierea electrică a redresorului trifazat comandat cu punct median realizat cu tiristoare, ce alimentează motorul de c.c. din fig.7.
Fig.8. Schema electrică a redresorului comandat cu punct median ce alimentează motorul
Motorul de c.c. poate fi echivalat prin inserierea elementelor Ra - rezistenŃa circuitului rotoric,
La - inductanŃa proprie totală a circuitului rotoric şi e - t.e.m. indusă prin rotaŃie în una din căile de
curent ale înfăşurării rotorice. Dacă se lucrează la o turaŃie fixată de lucru a motorului, t.e.m. este constantă şi va fi notată E. Notăm prin R, S şi T fazele reŃelei trifazate ce alimentează primarul în

Raport de Cercetare 2011 - 13
conexiune triunghi a transformatorului, αdu - tensiunea la bornele motorului de c.c. şi di – curentul
absorbit de motor. În vederea determinării expresiei matematice a caracteristicii externe a redresorului fig.8 este redesenată schematic în fig.9, specificându-se doar valorile medii corespunzătoare αdU şi dI .
Fig.9. Schema bloc pentru calculul expresiei matematice a caracteristicii externe a redresorului
Motorul poate funcŃiona în două regimuri: regimul de redresor dacă unghiul de comandă al tiristoarelor este 2/0 π<α< şi regimul de invertor neautonom, pe frecvenŃa f=50Hz a reŃelei de alimentare, dacă π<α<π 2/ . Dacă notăm prin m=3 - numărul de faze ale secundarului transformatorului şi prin β - unghiul de stingere al curentului di prin motor, pot apare trei regimuri
de fucŃionare ale motorului: 1.regimul de funcŃionare cu curent întrerupt prin sarcină, pentru m/20 π<β< , din (fig.10);
2.regimul de graniŃă, pentru β=2π/m; 3.regimul de funcŃionare cu curent neântrerupt prin sarcină, pentru β>2π/m.
Fig.10. Formele de undă ale tensiunii αdu şi curentului di prin sarcină pentru regim de curent
întrerupt prin motor
Alegând motorul cu aR << aLω (se neglijează aR =0), expresiile valorilor medii ale tensiunii
αdu şi curentului di prin motor, rezultate în urma rezolvării ecuaŃiilor diferenŃiale ale circuitului
din fig.9, sunt: 1.în regim de curent întrerupt prin sarcină ( m/20 π<β< ):
EUd =α , (12)
π−α+
α+
π−β
β−
α+
π−β−
π−α
π=
msin
msin
2mcos
mcos
X2
mI
Ld , (13)
în care aL LX ω= , iar relaŃia de legătură între E, α şi β este:

Raport de Cercetare 2011 - 14
π−α−
α+
π−β=β
msin
msinUE . (14)
2.în regim de graniŃă (β=2π/m):
m/2
0dLd EcosUUπ=β
α =α= (15)
α
ππ−
ππ
= sinm
cosmm
sinX
mUI
LdL (16)
unde dLI - valoarea medie dI în regim de graniŃă (limită), iar ( ) m/m/sinUU 0d ππ= -valoarea
medie a tensiunii în sarcină pentru redresoare polifazate necomandate cu punct median, ideale. 3.în regim de curent neîntrerupt prin sarcină (β>2π/m): α=α cosUU 0dd , (17)
oricare ar fi valoarea medie a curentului dI > dLI .
3.1.2. Graficul caracteristicii externe a redresorului trifazat cu punct median
În vederea reprezentării grafice a familiei de caracteristici externe, este necesară normarea mărimilor αdU şi dI , ele devenind dnU şi dnI astfel:
0d
not
dn U/EU = şi
2 pentru dL
d
not
dn I/II π=α
= . (18)
Deoarece în regim de conducŃie întreruptă relaŃiile care intervin sunt transcendente, pentru reprezentarea grafică a familiei de caracteristici externe normate în regimul conducŃiei întrerupte, pentru cazul m=3 şi U=50V s-a conceput un program în MatLab, care are următorul algoritm. 1. Stabilirea variabilelor globale alfa, Idn şi beta; 2. IniŃializarea într-o buclă de tip “FOR” a unghiului de conducŃie al tiristoarelor alfa. Alfa ia
valori de la 60° la 120°, cu pas fix de 5°; 3. IniŃializarea într-o buclă de tip “FOR” a curentului nominalizat ca variabilă globală Idn. Idn ia
valori de la 0 până la graniŃa regimului de conducŃie întreruptă (care este sin(alfa)), cu pas fix de 0.01;
4. Dacă Idn este diferit de zero se rezolvă ecuaŃia transcendentă (13), anume dnI = dnI (alfa, beta).
SoluŃia ecuaŃiei este parametrul beta notat în programul “FCT_MOT” ca variabila globală beta; 5. Cu valoarea lui beta de la pasul anterior se calculează valoarea lui E, folosind relaŃia
transcendentă (14); 6. Cu valoarea E de la pasul anterior se calculează valoarea lui dnU cu relaŃia (12);
7. Se reprezintă grafic familia de curbe dnU = dnU ( dnI ), având ca parametru pe alfa.
Listingul acestui program este: clear
clear global
global m alfa Idn
m=3;
% U=50;
Ud0=sin(pi/m)/(pi/m);
% format long
culoare(1)='y';
culoare(2)='m';
culoare(3)='c';
culoare(4)='r';
Raport de Cercetare 2011 - 15
culoare(5)='g';
culoare(6)='b';
culoare(7)='w';
culoare(8)='y';
culoare(9)='m';
culoare(10)='c';
culoare(11)='r';
culoare(12)='g';
culoare(13)='b';
culoare(14)='w';
culoare(15)='y';
culoare(16)='m';
culoare(17)='c';
culoare(18)='r';
culoare(19)='g';
crtCul=0;
for alfa=pi/3:pi/36:2*pi/3
crtCul=crtCul+1;
for Idn=0:.01:sin(alfa)
if Idn==0
betaIni=0;
else
betaIni=beta;
end
beta=fmins('fct_mot', betaIni)
if beta>2*pi/m
Udn(100*Idn+1)=cos(alfa);
elseif beta==0 Udn(100*Idn+1)=1;
else
E=(sin(beta-pi/m+alfa)-sin(alfa-pi/m))/beta;
Udn(100*Idn+1)=E/Ud0;
end
end
Idn=0:.01:sin(alfa);
hold on % pastreza graficul initial
% title('num2str(alfa)')
% plot(Idn, Udn, culoare(crtCul))
plot(Idn, Udn)
% disp(alfa)
% disp(Udn)
% disp('***')
grid on
% keyboard
% coco=î0 1 -1 1Ş;
% axis(coco)
clear Udn
end
in care funcŃia 'fct_mot' apelată este definită într-un fişier MATLAB:

Raport de Cercetare 2011 - 16
function y = fct_mot(beta)
global alfa Idn
y=abs(.5*(cos(alfa-pi/3)-cos(beta-pi/3+alfa)-.5*beta*(sin(beta-pi/3+alfa)+sin(alfa-
pi/3)))/(sin(pi/3)-pi/3*cos(pi/3))-Idn);
% y=.5*(cos(alfa-pi/3)-cos(beta-pi/3+alfa)-.5*beta*(sin(beta-pi/3+alfa)+sin(alfa-
pi/3)))/(sin(pi/3)-pi/3*cos(pi/3))-Idn;
În urma rulării, s-a obŃinut reprezentarea grafică din fig.11 pentru [ ]°°∈α 120,60 , în care
pentru [ ]°°∈α 90,60 convertorul lucrează ca redresor, iar pentru [ ]°°∈α 120,90 convertorul lucrează ca invertor neautonom. Caracteristicile externe normate au fost reprezentate doar în domeniul conducŃiei întrerupte, graficul în domeniul conducŃiei neîntrerupte continuând graficele paralel cu axa orizontală. Udn I2n
Fig.11. Caracteristicile externe ale redresorului trifazat cu punct median şi sarcină R-L-E 3.2. REDRESORUL TRIFAZAT COMANDAT ÎN PUNTE 3.2.1.Expresia matematică a caracteristicii externe a redresorului trifazat în punte având ca sarcină un motor de c.c.
Convertorul trifazat în punte complet comandată îmbină avantajele care decurg dintr-un număr mare de pulsuri (p=6) şi dintr-un număr mic de faze (m=3), fiind cea mai utilizată schemă de redresare. Datorită numărului mare de pulsuri, tensiunea redresată are pulsaŃii mult mai reduse decât la alte convertoare, motiv pentru care în unele aplicaŃii se elimină bobina de netezire.
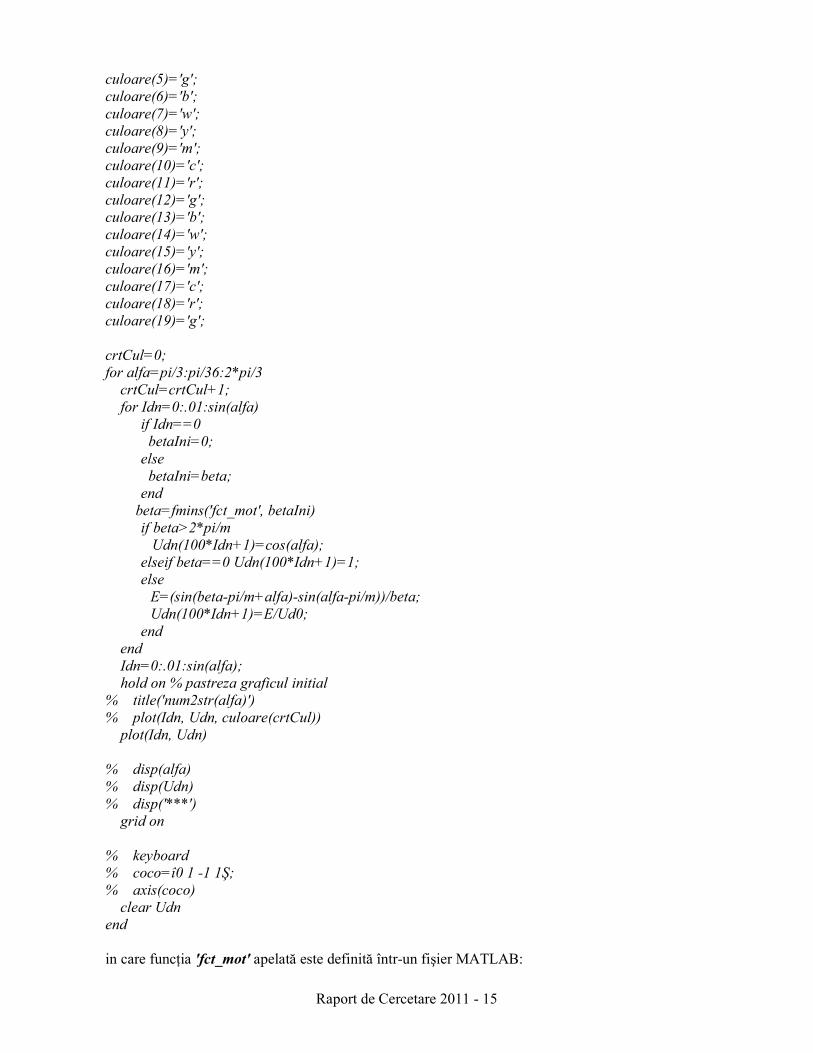
Schema din fig.12 este detalierea electrică a redresorului trifazat comandat în punte realizat cu tiristoare ce alimentează motorul de c.c. din fig.7.
Schema bloc de calcul a expresiei matematice a caracteristicii externe a redresorului din fig.9 se menŃine. Dacă notăm prin m=3 - numărul de faze ale secundarului transformatorului, p=2m=6 – numărul de pulsuri ale tensiunii redresate şi prin β - unghiul de stingere al curentului di prin
motor, pot apare de asemenea trei regimuri de fucŃionare ale motorului: 1.regimul de funcŃionare cu curent întrerupt prin sarcină, pentru 3/0 π<β< ;
2.regimul de graniŃă, pentru β=π/3; 3.regimul de funcŃionare cu curent neântrerupt prin sarcină, pentru β>π/3.
0 0.1 0 .2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 -0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Raport de Cercetare 2011 - 17
Fig.12. Schema electrică a redresorului comandat în punte ce alimentează motorul de c.c.
1.regimul de curent întrerupt prin sarcină ( 3/0 π<β< ):
Pentru simplitatea calculelor, se mută originea axei tensiunii αdu în momentul apariŃiei curentului
di . Astfel, αdu capătă expresia:
( )α+π+ω=α m/tsinUud (19)
Din schema de principiu a sistemului convertor-maşină de curent continuu din fig.9, rezultă ecuaŃia diferenŃială:
( )α+π+ω=++ m/tsinUeiRdt
diL da
da , (20)
cu condiŃia iniŃială di (t=0)=0.
Din rezolvarea ecuaŃiei (20) se determină expresia curentului di , iar valorile medii normate
ale curentului di (prin valoarea de normare 3U/ LXπ ) şi tensiunii αdu (prin valoarea de normare U)
sunt:
U
e
U
e
3cos
3cos
3Udn +
β
β+α+
π−
α+
ππ
= (21)
β
β+α+
π−
α+
π=
U
e
3cos
3cos
R
XI
a
Ldn (22)
RelaŃia de legătură între e şi β este obŃinută prin punerea condiŃiei la sfârşitul intervalului de conducŃie a curentului întrerupt, anume di (ωt=β)=0, rezultând:
β−−
+
β−
ϕ−α+
π−
ϕ−β+α+
π
=
L
a2
L
a
L
a
X
Rexp1
X
R1
X
Rexp
3sin
3sin
U
e (23)
în care
ω=ϕ
a
a
R
Larctg este unghiul de fază al sarcinii, iar aL LX ω= .
2. regimul de graniŃă (β=π/3): Se introduce valoarea β=π/3 în relaŃiile de mai sus. 3.regimul de curent neântrerupt prin sarcină (β>π/3):
απ
= cos3
Udn , (24)

Raport de Cercetare 2011 - 18
oricare ar fi valoarea medie a curentului dI > dLI .
3.2.2.Graficul caracteristicii externe a redresorului trifazat în punte
Deoarece în regim de conducŃie întreruptă relaŃiile care intervin sunt transcendente, pentru reprezentarea grafică a familiei de caracteristici externe normate în regimul conducŃiei întrerupte, pentru cazul m=3 şi U=50V s-a conceput din nou un program în MatLab, care are următorul algoritm: 1. Stabilirea variabilelor globale; 2. IniŃializarea într-o buclă de tip “FOR” a unghiului de conducŃie al tiristoarelor alfa. Alfa ia
valori de la 0° la 90°, cu pas fix de 5°; 3. IniŃializarea într-o buclă de tip “FOR” a tensiunii contraelectromotoare e nominalizată ca
variabilă globală E. E ia valori de la 0 până la 90 cu pas fix de 1; 4. Se determină variabila beta din ecuaŃia transcendentă E/U = f (alfa, beta). SoluŃia ecuaŃiei este
parametrul beta notat în programul “TRANZRED”ca variabila globală beta; 5. Dacă beta este cuprins între 0°şi 60° (regim întrerupt) atunci: 6. Cu valoarea lui beta de la pasul anterior se calculează valoarea lui dnU şi dnI ;
7. Dacă nu şi beta este cuprins între 60°şi 180° (regim neîntrerupt) atunci: 8. Cu valoarea lui beta de la pasul anterior se calculează valoarea lui dnU şi dnI ;
9. Se reprezintă grafic curbele Udn = f(Idn), pentru ambele regimuri de funcŃionare. Listingul acestui program este prezentat în continuare: clear;
clear global;
pipetrei=pi/3;
R=0.6;
L=0.008;
f=50;
U=90;
Xl=2*pi*f*L;
for alf=0:pi/36:pi
idn=zeros(1,90);
udn=ones(1,90);
for E=1:1:90
beta(E)=fmins('tranzred',alf,îş,îş,alf,E);
if (beta(E)>0)&(beta(E)<=pipetrei)
udn(E)=3/pi*(cos(pipetrei+alf)-cos(pipetrei+alf+beta(E))-E/U*beta(E))+E/U;
idn(E)=Xl/R*(cos(pipetrei+alf)-cos(pipetrei+alf+beta(E))-E/U*beta(E));
elseif (beta(E)>pipetrei)&(beta(E)<=pi)
udn(E)=3/pi*cos(alf);
idn(E)=Xl/R*(cos(pipetrei+alf)-cos(pipetrei+alf+beta(E))-E/U*beta(E));
elseif E/U>1
udn(E)=udn(E-1);
idn(E)=idn(E-1);
end;
end;
hold on;
îidnordonat indeş=sort(idn);
for i=1:1:90
udnordonat(i)=udn(inde(i));
end;
plot(idnordonat,udnordonat, ‘g’);
Raport de Cercetare 2011 - 19
end;
axis(î0 0.1 0 1ş)
end.
Programul de mai sus apelează pentru determinarea parametrului beta funcŃia “TRANZRED” care conŃine parametrii motorului: function y=tranzred(bet,alf,E) R=0.6;
L=0.008;
f=50;
U=90;
Xl=2*pi*f*L;
fi=atan(Xl/R);
Numarator=sin(pi/3+alf+bet-fi)-sin(pi/3+alf-fi)*exp(-R*bet/Xl);
Numitor=sqrt(1+(Xl/R)^2)*(1-exp(-R*bet/Xl));
epeu=E/U;
y=abs(Numarator/Numitor-epeu);
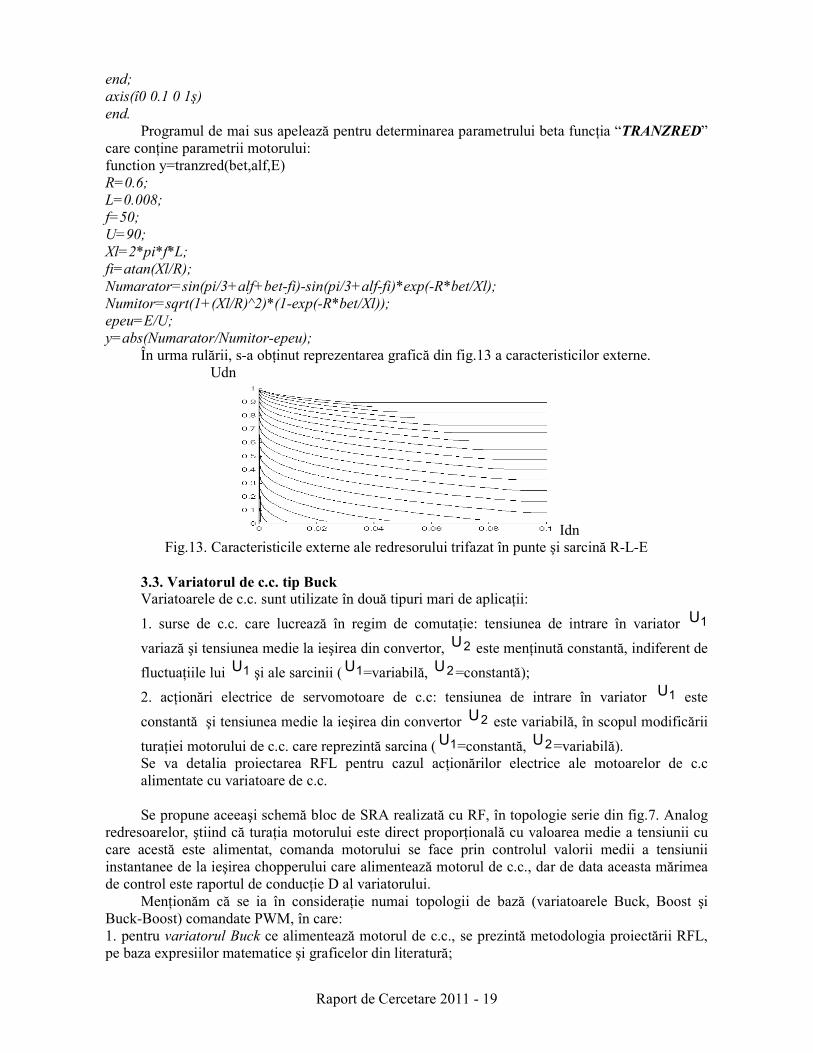
În urma rulării, s-a obŃinut reprezentarea grafică din fig.13 a caracteristicilor externe. Udn
Idn Fig.13. Caracteristicile externe ale redresorului trifazat în punte şi sarcină R-L-E
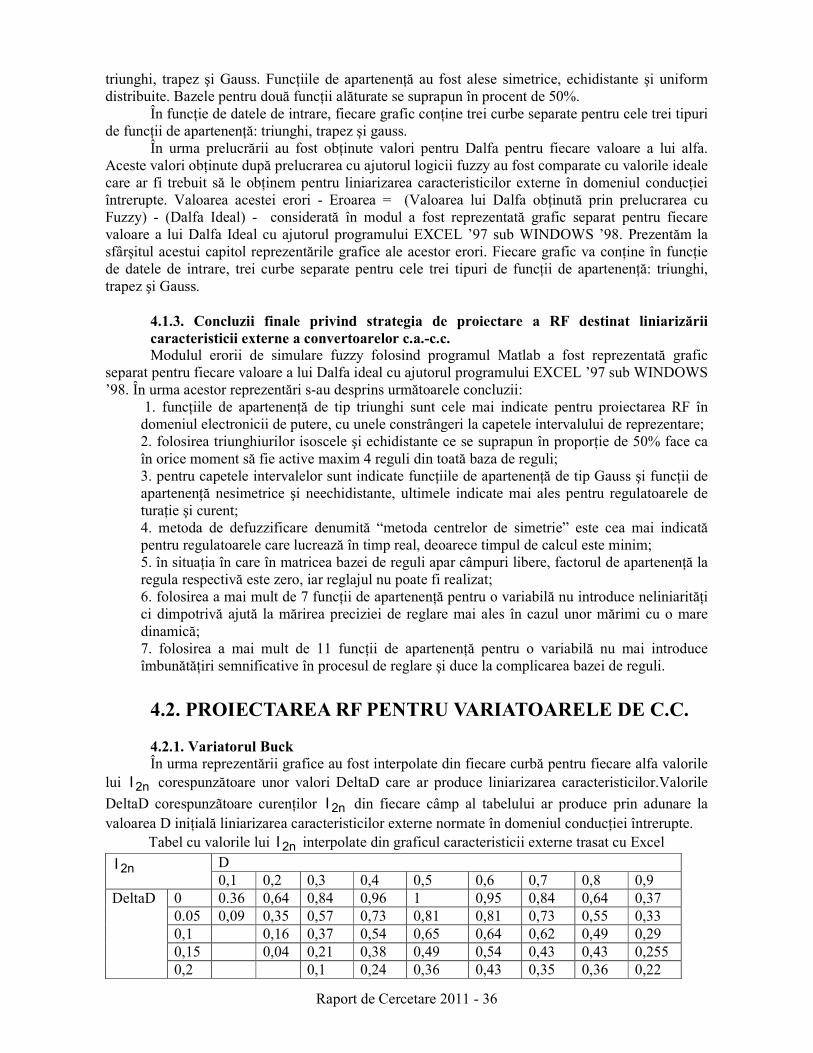
3.3. Variatorul de c.c. tip Buck
Variatoarele de c.c. sunt utilizate în două tipuri mari de aplicaŃii:
1. surse de c.c. care lucrează în regim de comutaŃie: tensiunea de intrare în variator 1U
variază şi tensiunea medie la ieşirea din convertor, 2U este menŃinută constantă, indiferent de
fluctuaŃiile lui 1U şi ale sarcinii ( 1U =variabilă, 2U =constantă);
2. acŃionări electrice de servomotoare de c.c: tensiunea de intrare în variator 1U este
constantă şi tensiunea medie la ieşirea din convertor 2U este variabilă, în scopul modificării
turaŃiei motorului de c.c. care reprezintă sarcina ( 1U =constantă, 2U =variabilă). Se va detalia proiectarea RFL pentru cazul acŃionărilor electrice ale motoarelor de c.c alimentate cu variatoare de c.c.
Se propune aceeaşi schemă bloc de SRA realizată cu RF, în topologie serie din fig.7. Analog redresoarelor, ştiind că turaŃia motorului este direct proporŃională cu valoarea medie a tensiunii cu care acestă este alimentat, comanda motorului se face prin controlul valorii medii a tensiunii instantanee de la ieşirea chopperului care alimentează motorul de c.c., dar de data aceasta mărimea de control este raportul de conducŃie D al variatorului. MenŃionăm că se ia în consideraŃie numai topologii de bază (variatoarele Buck, Boost şi Buck-Boost) comandate PWM, în care: 1. pentru variatorul Buck ce alimentează motorul de c.c., se prezintă metodologia proiectării RFL, pe baza expresiilor matematice şi graficelor din literatură;

Raport de Cercetare 2011 - 20
2. pentru variatoarele Boost şi Buck-Boost, literatura de specialitate oferă baza matematică necesară proiectării lor doar în situaŃia utilizării în cadrul surselor în comutaŃie. De aceea, în cadrul acestui se deduc mai întâi expresiile matematice şi se trasează graficele, ca apoi să se treacă la proiectarea RFL-ul corespunzător.
3.3.1. Variatorului Buck (cu raport de transformare subunitar, N<1) Fiind cu raport de transformare subunitar, acest convertor produce o tensiune mai mică la
ieşire decât la intrare. Tensiunea medie la ieşire pe durata unui ciclu de comutaŃie a contactorului static variază liniar în raport cu tensiunea de control şi deci convertorul se comportă ca un amplificator de putere liniar. Ipotezele generale de studiu sunt următoarele:
1. comutatoarele sunt ideale, anume fără pierderi în conducŃie sau în comutaŃie şi cu acŃiune instantanee;
2. sursa de alimentare este ideală (rezistenŃă internă zero); 3. elementele pasive de circuit (rezistoare, inductanŃe, condensatoare) sunt ideale; 4. analiza circuitelor se face în regim permanent.
3.3.1.1. Expresia matematică a caracteristicii externe a variatorului Buck având ca sarcină un motor de c.c.
Schema electrică a variatorului Buck, având ca sarcină Z motorul de c.c. şi prezentând un condensator C ca FTJ pe ieşire, este prezentată în fig.14.
Fig.14. Schema electrică a variatorului Buck
Formele de undă ale curentului Li ce circulă prin inductanŃa de acumulare L în fiecare regim de funcŃionare al variatorului sunt date în fig.15.
Fig.15. Formele de undă pentru cele 3 regimuri de functionare ale convertorului Buck

Raport de Cercetare 2011 - 21
Pe baza schemei electrice din fig.14 şi a formelor de undă din fig.15, se scrie setul de ecuaŃii diferenŃiale din care se va deduce expresia matematică a caracteristicii externe a variatorului Buck, care prezintă diferite forme, în funcŃie de regimul de funcŃionare al variatorului:
1.regimul cu circulaŃie continuă de curent prin sarcină, care este regimul dorit de funcŃionare pentru motor;
2.regimul limită (numit şi regim de graniŃă sau regim de funcŃionare întrerupt-neîntrerupt); 3. regimul cu circulaŃie discontinuă de curent prin sarcină. În vederea reprezentării grafice a familiei de caracteristici externe a variatorului Buck ce alimentează motorul de c.c., se analizează pe scurt fiecare regim de funcŃionare. 1.regimul cu circulaŃie continuă de curent prin sarcină În analiza regimului permanent se consideră că valoarea capacităŃii condensatorului C al filtrului FTJ este suficient de mare astfel încât tensiunea la bornele sale să fie constantă. Conform demonstraŃiilor din literatura de specialitate, raportul de transformare a variatorului
Buck în regim de conducŃie neîntreruptă a curentului prin sarcină este:
T
TD
U
UN c
1
2 === , (25)
în care cT - durata de conducŃie a contactorului static CS, iar T - perioada de comutaŃie a acestuia.
Valoarea medie a curentului Li reprezentat în fig.15.a) este:
2
IIII Mm2L
+== , (26)
în care mI - valoarea minimă a curentului Li , iar MI - valoarea maximă a curentului Li . 2.regimul limită (de graniŃă) Expresia raportului de transformare dată prin formula (25) rămâne aceeaşi, în timp ce expresia valorii medii a curentului Li în regim limită reprezentat în fig.15.b) este:
L2
T)D1(U
2
III 2ML2LL
−=== . (27)
3.regimul cu circulaŃie discontinuă de curent prin sarcină Dioda D cu rol de prelungire a conducŃiei în absenŃa conducŃiei CS va conduce numai pe intervalul TD1 , după cum se prezintă în fig.15.c). Expresia raportului de transformare devine:
11
2
DD
D
U
UN
+== , (28)
iar valoarea medie a curentului Li este:
2
)DD(III 1M2L
+== . (29)
După cum am menŃionat în prezentarea generală a variatoarelor de c.c., dacă ele sut utilizate în acŃionarea motoarelor de c.c., atunci 1U =constantă şi 2U =variabilă. În consecinŃă, în deducerea
expresiei caracteristicii externe vom exprima )U(fU 12 = . Astfel, pentru: 1.regimul cu circulaŃie continuă de curent prin sarcină Formula (25) devine: 12 NUU = (30) 2.regimul limită (de graniŃă) Formula (27) devine:
L2
T)D1(DUI 1LL
−= , (31)
iar valoarea sa maximă, obŃinută pentru D=0.5, este:
L8
TUI 1
maxLL = . (32)

Raport de Cercetare 2011 - 22
Valoarea normată este:
)D1(D4I
III
max,LL
LLn2LLn −=== (33)
Fig.16. Familia de caracteristici externe normate a variatorului Buck în regim de conducŃie întreruptă a curentului prin sarcină.
3.regimul cu circulaŃie discontinuă de curent prin sarcină Formula (29) devine:
N
D)N1(
L2
TUI
21
L−
⋅= , (34)
şi folosind formulele (30) şi (33), rezultă expresia caracteristicii externe:
n2
2
2
I25.0D
DN
+= . (35)
3.1.2.Graficul caracteristicii externe a variatorului Buck Formula (35) reprezintă o familie de caracteristici externe, de parametru D care ia valori între 0 şi 1. Folosind programul Excel sub WINDOWS’98, se obŃine graficul din fig.16. 3.2.Variatorul Boost (N>1) Fiind cu raport de transformare supraunitar, acest convertor produce o tensiune mai mare la ieşire decât la intrare. Ipotezele generale de studiu, precum şi regimurile de funcŃionare ale variatorului (inclusiv formele de undă din fig.15) se menŃin aceleaşi.
3.2.1. Expresia matematică a caracteristicii externe a variatorului Boost având ca sarcină un motor de c.c.
Schema electrică a variatorului Boost, având ca sarcină Z motorul de c.c. şi prezentând un condensator C ca FTJ pe ieşire, este prezentată în fig.17.
Fig.17. Schema electrică a variatorului Boost
0 , 0 00 , 0 50 , 1 00 , 1 50 , 2 00 , 2 50 , 3 00 , 3 50 , 4 00 , 4 50 , 5 00 , 5 50 , 6 00 , 6 50 , 7 00 , 7 50 , 8 00 , 8 50 , 9 00 , 9 51 , 0 0
1 1 1 2 1 3 1 4 1 5 1 6 1 7 1 8 1 9 1

Raport de Cercetare 2011 - 23
După cum am menŃionat în prezentarea generală a variatoarelor de c.c., dacă ele sut utilizate în acŃionarea motoarelor de c.c., atunci 1U =constantă şi 2U =variabilă. În consecinŃă, în deducerea
expresiei caracteristicii externe vom exprima )U(fU 12 = şi toate calculele vor fi făcute numai pentru această situaŃie. Pe baza schemei electrice din fig.17 şi a formelor de undă din fig.15, se scrie setul de ecuaŃii diferenŃiale din care se poate deduce expresia matematică a caracteristicii externe normate a variatorului Boost, care se prezintă sub diferite forme, în funcŃie de regimul de funcŃionare al variatorului. Astfel, se obŃin următoarele rezultate: 1. regimul cu circulaŃie continuă de curent prin sarcină Conform demonstraŃiilor din literatură, raportul de transformare al variatorului Boost în regim de conducŃie neîntreruptă a curentului prin sarcină este:
D1
1
U
UN
1
2
−== . (36)
Valorile medii ale curenŃilor Li şi 2i sunt:
2
IIII Mm1L
+== , (37)
( )2
IID1I Mm
2+
−= . (38)
2. regimul limită (de graniŃă) Raportul de transformare N rămâne acelaşi ca în relaŃia (36), în timp ce valorile medii ale curenŃilor Li şi 2i devin:
L2
TUD
2
III 1ML1LL === , (39)
( )L2
TUD1D
N
II 1L1L2 −== . (40)
Valoarea medie maximă a lui 2i se obŃine pentru D=0.5, deci valoarea medie normată a lui
2i în regim de graniŃă are expresia:
( )D1D4I
II
maxL2
L2Ln2 −== . (41)
3. regimul cu circulaŃie discontinuă de curent prin sarcină Raportul de transformare al variatorului Boost este:
1
1
1
2
D
DD
U
UN
+== , (42)
iar valoarea medie normată a curentului 2i este:
1N
D4I
2
n2 −= . (43)
Din relaŃia (43) reiese expresia caracteristicii externe normate a variatorului Boost utilizat în acŃionarea electrică a motorului de c.c. ca sarcină:
n2
2
I
D41N += . (44)
3.2.2.Graficul caracteristicii externe a variatorului Boost Expresia matematică (44) reprezintă o familie de caracteristici externe normate, de parametru D. Folosind programul Excel sub WINDOWS’98, se obŃine graficul din fig.18.

Raport de Cercetare 2011 - 24
N
I2n Fig.18. Familia de caracteristici externe normate a variatorului Boost în regim de conducŃie
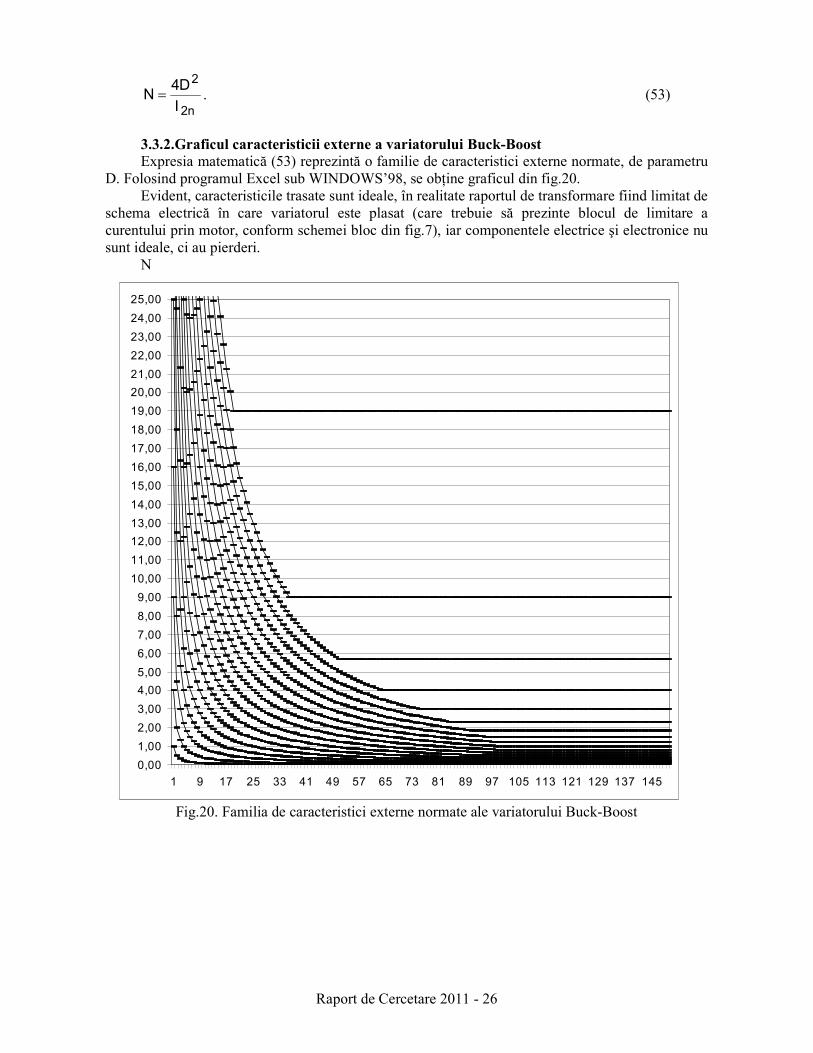
înrtreruptă şi neîntreruptă a curentului prin motor Evident, caracteristicile trasate sunt ideale, în realitate raportul de transformare fiind limitat de schema electrică în care variatorul este plasat (care trebuie să prezinte blocul de limitare a curentului prin motor, conform schemei bloc din fig.7), iar componentele electrice şi electronice nu sunt ideale, ci au pierderi. 3.3.Variatorul Buck-Boost (N<1, N=1 sau N>1) Fiind cu raport de transformare oarecare, acest convertor produce o tensiune mai mare, egală sau mai mică la ieşire decât la intrare. Ipotezele generale de studiu, precum şi regimurile de funcŃionare ale variatorului (inclusiv formele de undă din fig.15) se menŃin aceleaşi.
3.3.1. Expresia matematică a caracteristicii externe a variatorului Buck-Boost având ca sarcină un motor de c.c.
Schema electrică a variatorului Buck-Boost, având ca sarcină Z motorul de c.c. şi prezentând un condensator C ca FTJ pe ieşire, este prezentată în fig.19.
Fig.19. Schema electrică a variatorului Buck-Boost
0 ,0 0
1 ,0 0
2 ,0 0
3 ,0 0
4 ,0 0
5 ,0 0
6 ,0 0
7 ,0 0
8 ,0 0
9 ,0 0
1 0 ,0 0
1 1 ,0 0
1 2 ,0 0
1 3 ,0 0
1 4 ,0 0
1 5 ,0 0
1 6 ,0 0
1 7 ,0 0
1 8 ,0 0
1 9 ,0 0
2 0 ,0 0
2 1 ,0 0
2 2 ,0 0
2 3 ,0 0
2 4 ,0 0
2 5 ,0 0
1 9 1 7 2 5 3 3 4 1 4 9 5 7 6 5 7 3 8 1 8 9 9 7 1 0 5 1 1 3 1 2 1 1 2 9 1 3 7 1 4 5

Raport de Cercetare 2011 - 25
După cum am menŃionat în prezentarea generală a variatoarelor de c.c., dacă ele sut utilizate în acŃionarea motoarelor de c.c., atunci 1U =constantă şi 2U =variabilă. În consecinŃă, în deducerea
expresiei caracteristicii externe vom exprima )U(fU 12 = şi toate calculele vor fi făcute numai pentru această situaŃie. Pe baza schemei electrice din fig.19 şi a formelor de undă din fig.15, se scrie setul de ecuaŃii diferenŃiale din care se poate deduce expresia matematică a caracteristicii externe normate a variatorului Buck-Boost, care se prezintă sub diferite forme, în funcŃie de regimul de funcŃionare al variatorului. Astfel, se obŃin următoarele rezultate: 1. regimul cu circulaŃie continuă de curent prin sarcină Conform demonstraŃiilor din literatură, raportul de transformare al variatorului Buck - Boost în regim de conducŃie neîntreruptă a curentului prin sarcină este:
D1
D
U
UN
1
2
−== . (45)
Evident, D luând valori între 0 şi 1, N<1 pentru D între 0 şi 0.5, N=1 pentru D=0.5 şi N>1 pentru D între 0.5 şi 1. Valoarea medie a curentului Li este:
2
III MmL
+= , (46)
2. regimul limită (de graniŃă) Raportul de transformare N rămâne acelaşi ca în relaŃia (45), în timp ce valoarea medie a curentului Li devine:
L2
TUD
2
III 1ML1LL === , (47)
Valoarea medie maximă a lui Li se obŃine pentru D=1, deci valoarea medie normată a lui Li în regim de graniŃă are expresia:
DI
II
maxLL
LLLLn == . (48)
Din schema electrică a variatorului Buck-Boost dată în fig.19 şi din bilanŃul puterilor medii, rezultă valoarea medie a lui 2i în regim de graniŃă:
( ) ( )L2
TUD1DID1I 1
LLL2 −=−= . (49)
Valoarea medie maximă al lui 2i se obŃine pentru D=0.5, deci valoarea medie normată a lui
2i în regim de graniŃă are expresia:
( )D1D4I
II
maxL2
L2Ln2 −== . (50)
3. regimul cu circulaŃie discontinuă de curent prin sarcină Raportul de transformare al variatorului Buck-Boost este:
11
2
D
D
U
UN == , (51)
iar valoarea medie normată a curentului 2i este:
N
D4I
2
n2 = . (52)
Din relaŃia (52) reiese expresia caracteristicii externe normate a variatorului Buck-Boost utilizat în acŃionarea electrică a motorului de c.c. ca sarcină:
Raport de Cercetare 2011 - 26
n2
2
I
D4N = . (53)
3.3.2.Graficul caracteristicii externe a variatorului Buck-Boost Expresia matematică (53) reprezintă o familie de caracteristici externe normate, de parametru D. Folosind programul Excel sub WINDOWS’98, se obŃine graficul din fig.20. Evident, caracteristicile trasate sunt ideale, în realitate raportul de transformare fiind limitat de schema electrică în care variatorul este plasat (care trebuie să prezinte blocul de limitare a curentului prin motor, conform schemei bloc din fig.7), iar componentele electrice şi electronice nu sunt ideale, ci au pierderi. N
Fig.20. Familia de caracteristici externe normate ale variatorului Buck-Boost
0,00
1,00
2,00
3,00
4,00
5,00
6,00
7,00
8,00
9,00
10,00
11,00
12,00
13,00
14,00
15,00
16,00
17,00
18,00
19,00
20,00
21,00
22,00
23,00
24,00
25,00
1 9 17 25 33 41 49 57 65 73 81 89 97 105 113 121 129 137 145
Raport de Cercetare 2011 - 27
4. PROIECTAREA RF FOLOSIND MODELUL DE INFERENłĂ TIP MAMDANI PENTRU CONVERTOARELE DE C.C.
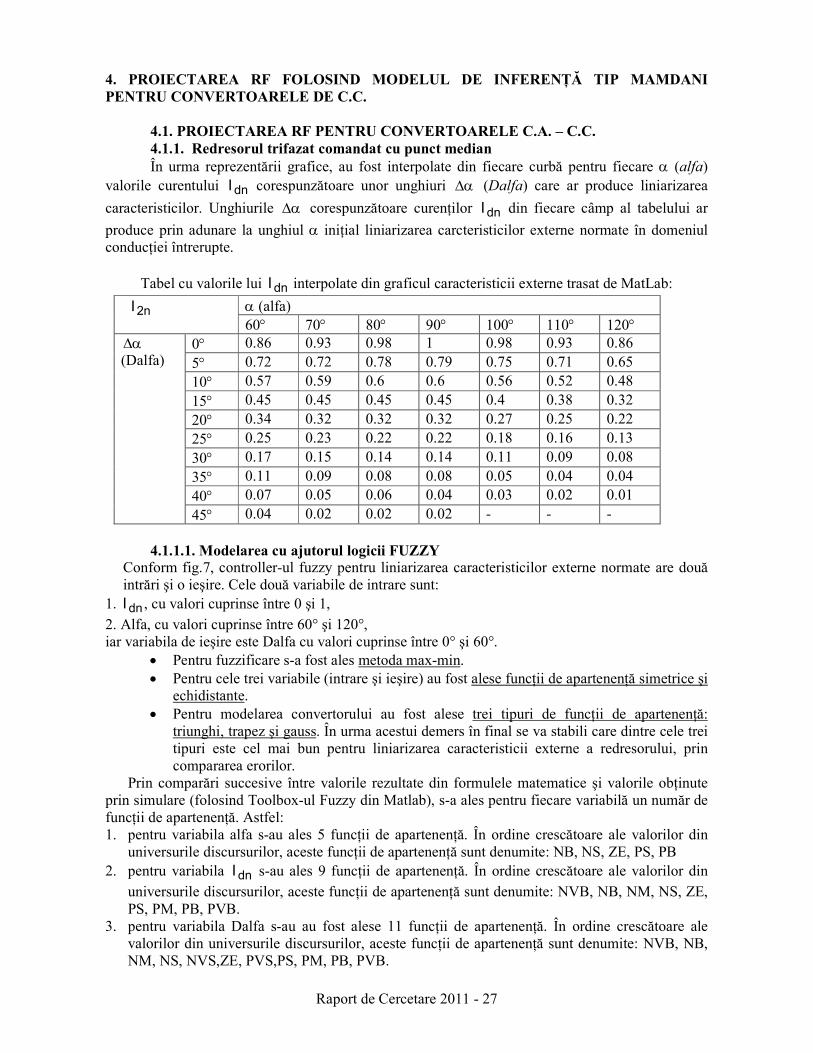
4.1. PROIECTAREA RF PENTRU CONVERTOARELE C.A. – C.C. 4.1.1. Redresorul trifazat comandat cu punct median În urma reprezentării grafice, au fost interpolate din fiecare curbă pentru fiecare α (alfa)
valorile curentului dnI corespunzătoare unor unghiuri α∆ (Dalfa) care ar produce liniarizarea
caracteristicilor. Unghiurile α∆ corespunzătoare curenŃilor dnI din fiecare câmp al tabelului ar
produce prin adunare la unghiul α iniŃial liniarizarea carcteristicilor externe normate în domeniul conducŃiei întrerupte.
Tabel cu valorile lui dnI interpolate din graficul caracteristicii externe trasat de MatLab:
n2I α (alfa) 60° 70° 80° 90° 100° 110° 120°
α∆ (Dalfa)
0° 0.86 0.93 0.98 1 0.98 0.93 0.86 5° 0.72 0.72 0.78 0.79 0.75 0.71 0.65 10° 0.57 0.59 0.6 0.6 0.56 0.52 0.48 15° 0.45 0.45 0.45 0.45 0.4 0.38 0.32 20° 0.34 0.32 0.32 0.32 0.27 0.25 0.22 25° 0.25 0.23 0.22 0.22 0.18 0.16 0.13 30° 0.17 0.15 0.14 0.14 0.11 0.09 0.08 35° 0.11 0.09 0.08 0.08 0.05 0.04 0.04 40° 0.07 0.05 0.06 0.04 0.03 0.02 0.01 45° 0.04 0.02 0.02 0.02 - - -
4.1.1.1. Modelarea cu ajutorul logicii FUZZY
Conform fig.7, controller-ul fuzzy pentru liniarizarea caracteristicilor externe normate are două intrări şi o ieşire. Cele două variabile de intrare sunt:
1. dnI , cu valori cuprinse între 0 şi 1,
2. Alfa, cu valori cuprinse între 60° şi 120°, iar variabila de ieşire este Dalfa cu valori cuprinse între 0° şi 60°.
• Pentru fuzzificare s-a fost ales metoda max-min. • Pentru cele trei variabile (intrare şi ieşire) au fost alese funcŃii de apartenenŃă simetrice şi
echidistante. • Pentru modelarea convertorului au fost alese trei tipuri de funcŃii de apartenenŃă:
triunghi, trapez şi gauss. În urma acestui demers în final se va stabili care dintre cele trei tipuri este cel mai bun pentru liniarizarea caracteristicii externe a redresorului, prin compararea erorilor.
Prin comparări succesive între valorile rezultate din formulele matematice şi valorile obŃinute prin simulare (folosind Toolbox-ul Fuzzy din Matlab), s-a ales pentru fiecare variabilă un număr de funcŃii de apartenenŃă. Astfel: 1. pentru variabila alfa s-au ales 5 funcŃii de apartenenŃă. În ordine crescătoare ale valorilor din
universurile discursurilor, aceste funcŃii de apartenenŃă sunt denumite: NB, NS, ZE, PS, PB 2. pentru variabila dnI s-au ales 9 funcŃii de apartenenŃă. În ordine crescătoare ale valorilor din
universurile discursurilor, aceste funcŃii de apartenenŃă sunt denumite: NVB, NB, NM, NS, ZE, PS, PM, PB, PVB.
3. pentru variabila Dalfa s-au au fost alese 11 funcŃii de apartenenŃă. În ordine crescătoare ale valorilor din universurile discursurilor, aceste funcŃii de apartenenŃă sunt denumite: NVB, NB, NM, NS, NVS,ZE, PVS,PS, PM, PB, PVB.

Raport de Cercetare 2011 - 28
Pe baza datelor interpolate din reprezentările grafice ale caracteristicilor externe normate şi a experienŃei practice privind funcŃionarea convertorului, dependenŃa Dalfa = f( dnI , alfa) a fost
stabilită sub forma unei matrici de inferenŃă completă reprezentând baza de reguli conform căreia funcŃionează regulatorul:
Baza de reguli fuzzy pentru regulatorul fuzzy a redresorului ideal
dnI alfa NB NS ZE PS PB
Dalfa NVB PM PM PS PS PS NB PVS ZE ZE ZE NVS NM NVS NVS NVS NS NS NS NS NS NS NM NS ZE NM NM NM NM NM PS NM NM NM NM NB PM NVB NVB NB NVB NVB PB NVB NVB NVB NVB NVB PVB NVB NVB NVB NVB NVB
4.1.1.2. Cazul funcŃiilor de apartenenŃă TRIUNGHI Au fost alese triunghiuri isoscele simetrice şi echidistante ale căror baze se suprapun în
procent de 50%. Această alegere are avantajul major că pentru un set precis de valori ale mărimilor de intrare dnI şi alfa să nu fie activate la un moment dat decât 4 reguli din întreaga bază de reguli.
În urma defuzzificări cu metoda centrelor de simetrie s-au obŃinut următoarele rezultate pentru variabila de ieşire Dalfa. Prima coloană din tabel reprezintă valorile ideale ale lui Dalfa care ar fi de dorit să se obŃină pentru liniarizarea caracteristicilor.
Tabel cu valorile lui Dalfa obŃinute în urma simulării cu regulator fuzzy
Dalfa obŃinut prin simulare fuzzy cu Matlab
alfa
60° 70° 80° 90° 100° 110° 120°
Dalfa ideal
0° 1.8° 1.8° 1.8° 1.8° 2.4° 5.4° 2.4° 5° 4.2° 4.8° 6° 5.4° 6° 7.2° 11.4° 10° 12° 12° 12° 12° 12° 12° 12.6° 15° 13.8° 13.8° 13.8° 13.8° 16.8° 18° 18° 20° 19.2° 20.4° 20.4° 20.4° 23.4° 22.2° 19.2° 25° 24° 24.6° 25.2° 25.2° 27.6° 27° 24° 30° 33° 30.6° 29.4° 29.4° 30.6° 30° 27° 35° 36.6° 34.2° 37.2° 33° 34.2° 33° 33.6° 40° 39.6° 39.6° 40.2° 39.6° 34.8° 34.8° 35.4° 45° 46.6° 46.2° 45° 45° - - -
În următorul tabel este exprimată eroarea = (Valoarea obŃinută prin simulare fuzzy) - (Dalfa ideal):
Tabel cu erorile de simulare fuzzy cu Matlab Eroarea de simulare
alfa
60° 70° 80° 90° 100° 110° 120°
Dalfa ideal 0° 1.8° 1.8° 1.8° 1.8° 2,4° 5.4° 2.4° 5° -0.8° -0.2° 1° 0.4° 1° 2.2° 6.4°
Raport de Cercetare 2011 - 29
10° 2° 2° 2° 2° 2° 2° 2.6° 15° -0.2° -0.2° -0.2° -0.2° 1.8° 3° 3° 20° -0.8° 0.4° 0.4° 0.4° 3.4° 2.2° -0.8° 25° -1° -0.4° 0.2° 0.2° 2.6° 2° -1° 30° 3° 0.6° -0.6° -0.6° 0.6° 0° -3° 35° 1.6° -0.8° 2.2° -2° -0.8° -2° -1.4° 40° -0.4° -0.4° 0.2° -0.4° -5.2° -5.2° -4.6° 45° 1.6° 1.2° 0° 0° - - -
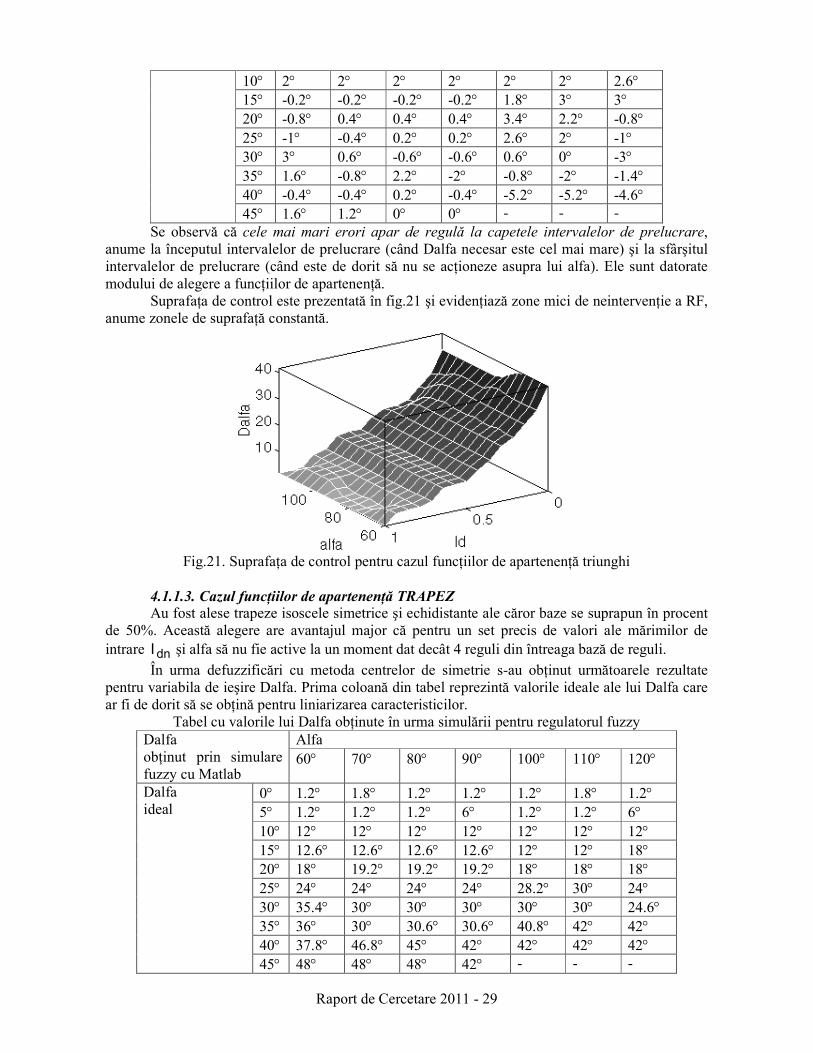
Se observă că cele mai mari erori apar de regulă la capetele intervalelor de prelucrare, anume la începutul intervalelor de prelucrare (când Dalfa necesar este cel mai mare) şi la sfârşitul intervalelor de prelucrare (când este de dorit să nu se acŃioneze asupra lui alfa). Ele sunt datorate modului de alegere a funcŃiilor de apartenenŃă.
SuprafaŃa de control este prezentată în fig.21 şi evidenŃiază zone mici de neintervenŃie a RF, anume zonele de suprafaŃă constantă.
Fig.21. SuprafaŃa de control pentru cazul funcŃiilor de apartenenŃă triunghi
4.1.1.3. Cazul funcŃiilor de apartenenŃă TRAPEZ Au fost alese trapeze isoscele simetrice şi echidistante ale căror baze se suprapun în procent
de 50%. Această alegere are avantajul major că pentru un set precis de valori ale mărimilor de intrare dnI şi alfa să nu fie active la un moment dat decât 4 reguli din întreaga bază de reguli.
În urma defuzzificări cu metoda centrelor de simetrie s-au obŃinut următoarele rezultate pentru variabila de ieşire Dalfa. Prima coloană din tabel reprezintă valorile ideale ale lui Dalfa care ar fi de dorit să se obŃină pentru liniarizarea caracteristicilor.
Tabel cu valorile lui Dalfa obŃinute în urma simulării pentru regulatorul fuzzy Dalfa obŃinut prin simulare fuzzy cu Matlab
Alfa 60° 70° 80° 90° 100° 110° 120°
Dalfa ideal
0° 1.2° 1.8° 1.2° 1.2° 1.2° 1.8° 1.2° 5° 1.2° 1.2° 1.2° 6° 1.2° 1.2° 6° 10° 12° 12° 12° 12° 12° 12° 12° 15° 12.6° 12.6° 12.6° 12.6° 12° 12° 18° 20° 18° 19.2° 19.2° 19.2° 18° 18° 18° 25° 24° 24° 24° 24° 28.2° 30° 24° 30° 35.4° 30° 30° 30° 30° 30° 24.6° 35° 36° 30° 30.6° 30.6° 40.8° 42° 42° 40° 37.8° 46.8° 45° 42° 42° 42° 42° 45° 48° 48° 48° 42° - - -

Raport de Cercetare 2011 - 30
În următorul tabel este exprimată eroarea = (Valoarea obŃinută prin simulare fuzzy) - (Dalfa ideal):
Tabel cu erorile de simulare fuzzy cu Matlab Eroarea de simulare
Alfa 60° 70° 80° 90° 100° 110° 120°
Dalfa 0° 1.2° 1.8° 1.2° 1.2° 1.2° 1.8° 1.2° 5° -3.8° -3.8° -3.8° 1° -3.8° -3.8° 1° 10° 2° 2° 2° 2° 2° 2° 2° 15° -2.4° -2.4° -2.4° -2.4° -3° -3° 3° 20° -2° -0.8° -0.8° -0.8° -2° -2° -2° 25° -1° -1° -1° -1° 3.2° 5° -1° 30° 5.4° 0° 0° 0° 0° 0° -5.4° 35° 1° -5° -4.4° -4.4° 5.8° 7° 7° 40° -2.2° 6.8° 5° 2° 2° 2° 2° 45° 3° 3° 3° -3° - - -
SuprafaŃa de control este prezentată în fig.22 şi, deoarece erorile cresc faŃă de cazul funcŃiilor de apartenenŃă triunghi, zonele de neintervenŃie a RF (palierele) sunt mai mari şi mai numeroase.
4.1.1.4. Cazul funcŃiilor de apartenenŃă GAUSS Au fost alese funcŃii de tip Gauss simetrice şi echidistante. Această alegere are avantajul
major că pentru un set precis de valori ale mărimilor de intrare dnI şi alfa să nu fie active la un
moment dat decât 4 reguli din întreaga bază de reguli. În urma defuzzificării cu metoda centrelor de simetrie s-au obŃinut următoarele rezultate
pentru variabila de ieşire Dalfa. Prima coloană din tabel reprezintă valorile ideale ale lui Dalfa care ar fi de dorit să se obŃină pentru liniarizarea caracteristicilor.
Tabel cu valorile lui Dalfa obŃinute în urma simulării pentru regulatorul fuzzy Dalfa obŃinut prin simulare fuzzy cu Matlab
alfa 60° 70° 80° 90° 100° 110° 120°
Dalfa ideal
0° 1.8° 1.8° 1.8° 1.8° 1.8° 1.8° 1.8° 5° 3.6° 3.6° 3.6° 6° 3.6° 6° 6° 10° 12° 12° 12° 12° 12° 11.4° 12.6° 15° 13.8° 13.8° 13.8° 13.8° 13.2° 13.2° 17.4° 20° 18.6° 20.4° 20.4° 19.8° 18.6° 18° 18.6° 25° 24° 25.2° 24.6° 24.6° 25.8° 28.2° 24° 30° 33.6° 30.6° 30° 30° 30.6° 30.6° 26.4° 35° 36.6° 33° 34.2° 32.4° 39° 38.4° 39.6° 40° 39° 41.4° 40.2° 40.2° 40.2° 40.2° 41.4° 45° 45.6° 46.2° 45.6° 41.4° - - -
Raport de Cercetare 2011 - 31
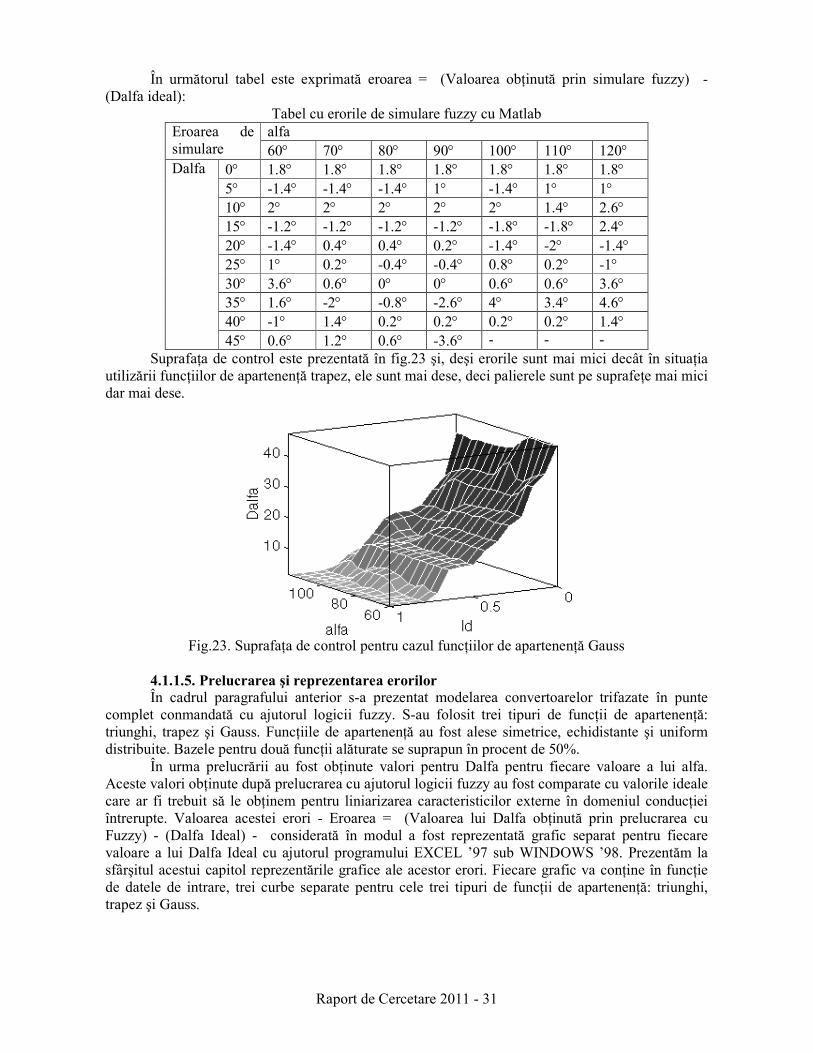
În următorul tabel este exprimată eroarea = (Valoarea obŃinută prin simulare fuzzy) - (Dalfa ideal):
Tabel cu erorile de simulare fuzzy cu Matlab Eroarea de simulare
alfa 60° 70° 80° 90° 100° 110° 120°
Dalfa 0° 1.8° 1.8° 1.8° 1.8° 1.8° 1.8° 1.8° 5° -1.4° -1.4° -1.4° 1° -1.4° 1° 1° 10° 2° 2° 2° 2° 2° 1.4° 2.6° 15° -1.2° -1.2° -1.2° -1.2° -1.8° -1.8° 2.4° 20° -1.4° 0.4° 0.4° 0.2° -1.4° -2° -1.4° 25° 1° 0.2° -0.4° -0.4° 0.8° 0.2° -1° 30° 3.6° 0.6° 0° 0° 0.6° 0.6° 3.6° 35° 1.6° -2° -0.8° -2.6° 4° 3.4° 4.6° 40° -1° 1.4° 0.2° 0.2° 0.2° 0.2° 1.4° 45° 0.6° 1.2° 0.6° -3.6° - - -
SuprafaŃa de control este prezentată în fig.23 şi, deşi erorile sunt mai mici decât în situaŃia utilizării funcŃiilor de apartenenŃă trapez, ele sunt mai dese, deci palierele sunt pe suprafeŃe mai mici dar mai dese.
Fig.23. SuprafaŃa de control pentru cazul funcŃiilor de apartenenŃă Gauss
4.1.1.5. Prelucrarea şi reprezentarea erorilor În cadrul paragrafului anterior s-a prezentat modelarea convertoarelor trifazate în punte
complet conmandată cu ajutorul logicii fuzzy. S-au folosit trei tipuri de funcŃii de apartenenŃă: triunghi, trapez şi Gauss. FuncŃiile de apartenenŃă au fost alese simetrice, echidistante şi uniform distribuite. Bazele pentru două funcŃii alăturate se suprapun în procent de 50%.
În urma prelucrării au fost obŃinute valori pentru Dalfa pentru fiecare valoare a lui alfa. Aceste valori obŃinute după prelucrarea cu ajutorul logicii fuzzy au fost comparate cu valorile ideale care ar fi trebuit să le obŃinem pentru liniarizarea caracteristicilor externe în domeniul conducŃiei întrerupte. Valoarea acestei erori - Eroarea = (Valoarea lui Dalfa obŃinută prin prelucrarea cu Fuzzy) - (Dalfa Ideal) - considerată în modul a fost reprezentată grafic separat pentru fiecare valoare a lui Dalfa Ideal cu ajutorul programului EXCEL ’97 sub WINDOWS ’98. Prezentăm la sfârşitul acestui capitol reprezentările grafice ale acestor erori. Fiecare grafic va conŃine în funcŃie de datele de intrare, trei curbe separate pentru cele trei tipuri de funcŃii de apartenenŃă: triunghi, trapez şi Gauss.
Raport de Cercetare 2011 - 32
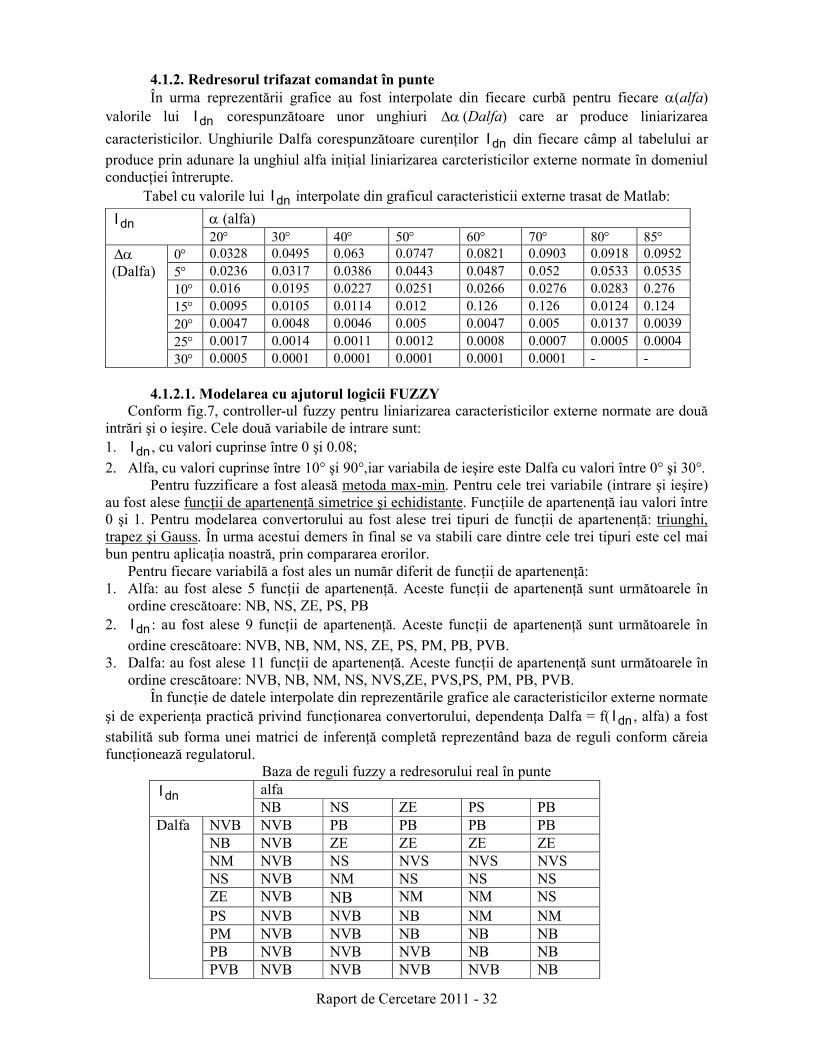
4.1.2. Redresorul trifazat comandat în punte În urma reprezentării grafice au fost interpolate din fiecare curbă pentru fiecare α(alfa)
valorile lui dnI corespunzătoare unor unghiuri α∆ (Dalfa) care ar produce liniarizarea
caracteristicilor. Unghiurile Dalfa corespunzătoare curenŃilor dnI din fiecare câmp al tabelului ar
produce prin adunare la unghiul alfa iniŃial liniarizarea carcteristicilor externe normate în domeniul conducŃiei întrerupte.
Tabel cu valorile lui dnI interpolate din graficul caracteristicii externe trasat de Matlab:
dnI α (alfa) 20° 30° 40° 50° 60° 70° 80° 85°
α∆ (Dalfa)
0° 0.0328 0.0495 0.063 0.0747 0.0821 0.0903 0.0918 0.0952 5° 0.0236 0.0317 0.0386 0.0443 0.0487 0.052 0.0533 0.0535 10° 0.016 0.0195 0.0227 0.0251 0.0266 0.0276 0.0283 0.276 15° 0.0095 0.0105 0.0114 0.012 0.126 0.126 0.0124 0.124 20° 0.0047 0.0048 0.0046 0.005 0.0047 0.005 0.0137 0.0039 25° 0.0017 0.0014 0.0011 0.0012 0.0008 0.0007 0.0005 0.0004 30° 0.0005 0.0001 0.0001 0.0001 0.0001 0.0001 - -
4.1.2.1. Modelarea cu ajutorul logicii FUZZY
Conform fig.7, controller-ul fuzzy pentru liniarizarea caracteristicilor externe normate are două intrări şi o ieşire. Cele două variabile de intrare sunt: 1. dnI , cu valori cuprinse între 0 şi 0.08;
2. Alfa, cu valori cuprinse între 10° şi 90°,iar variabila de ieşire este Dalfa cu valori între 0° şi 30°. Pentru fuzzificare a fost aleasă metoda max-min. Pentru cele trei variabile (intrare şi ieşire)
au fost alese funcŃii de apartenenŃă simetrice şi echidistante. FuncŃiile de apartenenŃă iau valori între 0 şi 1. Pentru modelarea convertorului au fost alese trei tipuri de funcŃii de apartenenŃă: triunghi, trapez şi Gauss. În urma acestui demers în final se va stabili care dintre cele trei tipuri este cel mai bun pentru aplicaŃia noastră, prin compararea erorilor.
Pentru fiecare variabilă a fost ales un număr diferit de funcŃii de apartenenŃă: 1. Alfa: au fost alese 5 funcŃii de apartenenŃă. Aceste funcŃii de apartenenŃă sunt următoarele în
ordine crescătoare: NB, NS, ZE, PS, PB 2. dnI : au fost alese 9 funcŃii de apartenenŃă. Aceste funcŃii de apartenenŃă sunt următoarele în
ordine crescătoare: NVB, NB, NM, NS, ZE, PS, PM, PB, PVB. 3. Dalfa: au fost alese 11 funcŃii de apartenenŃă. Aceste funcŃii de apartenenŃă sunt următoarele în
ordine crescătoare: NVB, NB, NM, NS, NVS,ZE, PVS,PS, PM, PB, PVB. În funcŃie de datele interpolate din reprezentările grafice ale caracteristicilor externe normate şi de experienŃa practică privind funcŃionarea convertorului, dependenŃa Dalfa = f( dnI , alfa) a fost
stabilită sub forma unei matrici de inferenŃă completă reprezentând baza de reguli conform căreia funcŃionează regulatorul.
Baza de reguli fuzzy a redresorului real în punte
dnI alfa NB NS ZE PS PB
Dalfa NVB NVB PB PB PB PB NB NVB ZE ZE ZE ZE NM NVB NS NVS NVS NVS NS NVB NM NS NS NS ZE NVB NB NM NM NS PS NVB NVB NB NM NM PM NVB NVB NB NB NB PB NVB NVB NVB NB NB PVB NVB NVB NVB NVB NB

Raport de Cercetare 2011 - 33
4.1.2.2. Cazul funcŃiilor de apartenenŃă TRIUNGHI Au fost alese triunghiuri isoscele simetrice şi echidistante ale căror baze se suprapun în
procent de 50%. Această alegere are avantajul major că pentru un set precis de valori ale mărimilor de intrare dnI şi alfa să nu fie active la un moment dat decât 4 reguli din întreaga bază de reguli.
În urma defuzzificări cu metoda centrelor de simetrie s-au obŃinut următoarele rezultate pentru variabila de ieşire Dalfa. Prima coloană din tabel reprezintă valorile ideale ale lui Dalfa care ar fi de dorit să se obŃină pentru liniarizarea caracteristicilor.
Tabel cu valorile lui Dalfa obŃinute în urma simulării cu regulator fuzzy Dalfa obŃinut prin simulare fuzzy cu Matlab
alfa 20° 30° 40° 50° 60° 70° 80° 85°
Dalfa 0° 4.5° 0.9° 2.7° 0.9° - - - - 5° 6.6° 5.7° 4.8° 4.8° 4.5° 5.7° 5.1° 5.1° 10° 9.6° 9.3° 9.6° 10.5° 9.9° 9.6° 9.6° 9.6° 15° 14.1° 15° 14.1° 14.7° 14.1° 14.4° 14.4° 14.4° 20° 16.2° 24.6° 24.6° 24.3° 24.6° 24.3° 24.3° 25.5° 25° 24.6° 26.7° 26.4° 26.7° 26.4° 26.7° 26.7° 26.7° 30° 25.5° 27° 27° 27° 27° 27° - -
În următorul tabel sunt exprimate erorile lui Dalfa faŃă de datele care ar fi trebuit obŃinute: Eroarea = (Valoarea obŃinută prin prelucrarea cu Fuzzy) - (Dalfa Ideal)
Tabel cu erorile de simulare fuzzy cu Matlab Eroarea de simulare
alfa 20° 30° 40° 50° 60° 70° 80° 85°
Dalfa ideal
0° 4.5° 0.9° 2.7° 0.9° - - - - 5° 1.6° 0.7° -0.2° -0.2° -0.5° 0.7° 0.1° 0.1° 10° -0.4° -0.7° -0.4° 0.5° -0.1° -0.4° -0.4° -0.4° 15° -0.9° 0° 0.9° -0.3° -0.9° -0.6° -0.6° -0.6° 20° -3.8° 4.6° 4.6° 4.3° 4.6° 4.3° 4.3° 5.5° 25° -0.4° 1.7° 1.4° 1.7° 1.4° 1.7° 1.7° 1.7° 30° -4.5° -3° -3° -3° -3° -3° - -
SuprafaŃa de control este prezentată în fig. 24.
Fig.24. SuprafaŃa de control pentru cazul funcŃiilor de apartenenŃă triunghi
Raport de Cercetare 2011 - 34
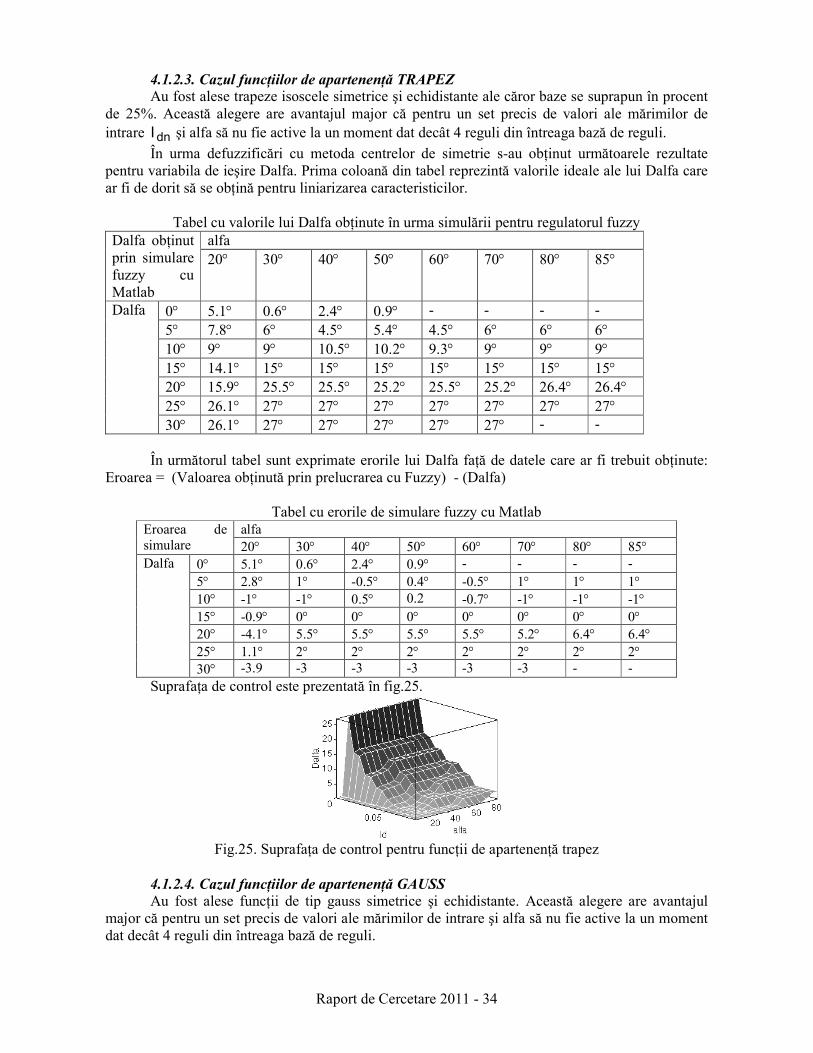
4.1.2.3. Cazul funcŃiilor de apartenenŃă TRAPEZ Au fost alese trapeze isoscele simetrice şi echidistante ale căror baze se suprapun în procent
de 25%. Această alegere are avantajul major că pentru un set precis de valori ale mărimilor de intrare dnI şi alfa să nu fie active la un moment dat decât 4 reguli din întreaga bază de reguli.
În urma defuzzificări cu metoda centrelor de simetrie s-au obŃinut următoarele rezultate pentru variabila de ieşire Dalfa. Prima coloană din tabel reprezintă valorile ideale ale lui Dalfa care ar fi de dorit să se obŃină pentru liniarizarea caracteristicilor.
Tabel cu valorile lui Dalfa obŃinute în urma simulării pentru regulatorul fuzzy Dalfa obŃinut prin simulare fuzzy cu Matlab
alfa 20° 30° 40° 50° 60° 70° 80° 85°
Dalfa 0° 5.1° 0.6° 2.4° 0.9° - - - - 5° 7.8° 6° 4.5° 5.4° 4.5° 6° 6° 6° 10° 9° 9° 10.5° 10.2° 9.3° 9° 9° 9° 15° 14.1° 15° 15° 15° 15° 15° 15° 15° 20° 15.9° 25.5° 25.5° 25.2° 25.5° 25.2° 26.4° 26.4° 25° 26.1° 27° 27° 27° 27° 27° 27° 27° 30° 26.1° 27° 27° 27° 27° 27° - -
În următorul tabel sunt exprimate erorile lui Dalfa faŃă de datele care ar fi trebuit obŃinute:
Eroarea = (Valoarea obŃinută prin prelucrarea cu Fuzzy) - (Dalfa)
Tabel cu erorile de simulare fuzzy cu Matlab Eroarea de simulare
alfa 20° 30° 40° 50° 60° 70° 80° 85°
Dalfa 0° 5.1° 0.6° 2.4° 0.9° - - - - 5° 2.8° 1° -0.5° 0.4° -0.5° 1° 1° 1° 10° -1° -1° 0.5° 0.2 -0.7° -1° -1° -1° 15° -0.9° 0° 0° 0° 0° 0° 0° 0° 20° -4.1° 5.5° 5.5° 5.5° 5.5° 5.2° 6.4° 6.4° 25° 1.1° 2° 2° 2° 2° 2° 2° 2° 30° -3.9 -3 -3 -3 -3 -3 - -
SuprafaŃa de control este prezentată în fig.25.
Fig.25. SuprafaŃa de control pentru funcŃii de apartenenŃă trapez
4.1.2.4. Cazul funcŃiilor de apartenenŃă GAUSS Au fost alese funcŃii de tip gauss simetrice şi echidistante. Această alegere are avantajul
major că pentru un set precis de valori ale mărimilor de intrare şi alfa să nu fie active la un moment dat decât 4 reguli din întreaga bază de reguli.

Raport de Cercetare 2011 - 35
În urma defuzzificări cu metoda centrelor de simetrie s-au obŃinut următoarele rezultate pentru variabila de ieşire Dalfa. Prima coloană din tabel reprezintă valorile ideale ale lui Dalfa care ar fi de dorit să se obŃină pentru liniarizarea caracteristicilor.
Tabel cu valorile lui Dalfa obŃinute în urma simulării pentru regulatorul fuzzy Dalfa obŃinut prin simulare fuzzy cu Matlab
alfa 20° 30° 40° 50° 60° 70° 80° 85°
Dalfa ideal
0° 4.8° 0.9° 2.7° 1.2° - - - - 5° 6.6° 6° 4.8° 5.1° 4.5° 5.7° 5.1° 5.4° 10° 9.6° 9° 9.9° 10.2° 9.9° 9.3° 9.3° 9.3° 15° 14.1° 14.7° 14.4° 14.7° 14.4° 14.7° 14.4° 14.7° 20° 16.1° 17.7° 24.3° 18.3° 24.3° 18.3° 25.2° 25.5° 25° 24.3° 26.4° 26.4° 26.7° 26.4° 26.7° 26.4° 26.7° 30° 25.2° 26.7° 26.4° 26.7° 26.4° 26.7° - -
În următorul tabel sunt exprimate erorile lui Dalfa faŃă de datele care ar fi trebuit obŃinute: Eroarea = (Valoarea obŃinută prin prelucrarea cu Fuzzy) - (Dalfa)
Tabel cu erorile de simulare fuzzy cu Matlab Eroarea de simulare
alfa 20° 30° 40° 50° 60° 70° 80° 85°
Dalfa 0° 4.8° 0.9° 2.7° 1.2° - - - - 5° 1.6° 1° -0.2° 0.1° -0.5° 0.7° 0.1° 0.4° 10° -0.4° -1° -0.1° 0.2° -0.1° -0.7° -0.7° -0.7° 15° -0.9° -0.3° -0.6° -0.3° -0.6° -0.3° -0.6° -0.3° 20° -3.9° -2.3° 4.3° -1.7° 4.3° -1.7° 5.2° 5.5° 25° -0.7° 1.4° 1.4° 1.7° 1.4° 1.7° 1.4° 1.7°
30° -4.8° -3.3° -3.6° -3.3° -3.6° -3.3° - -
SuprafaŃa de control este prezentată în fig.26.
Fig.26. SuprafaŃa de control pentru funcŃii de apartenenŃă Gauss
4.1.2.5. Prelucrarea şi reprezentarea erorilor În cadrul paragrafului anterior s-a prezentat modelarea convertoarelor trifazate în punte
complet conmandată cu ajutorul logicii fuzzy. S-au folosit trei tipuri de funcŃii de apartenenŃă:
Raport de Cercetare 2011 - 36
triunghi, trapez şi Gauss. FuncŃiile de apartenenŃă au fost alese simetrice, echidistante şi uniform distribuite. Bazele pentru două funcŃii alăturate se suprapun în procent de 50%.
În funcŃie de datele de intrare, fiecare grafic conŃine trei curbe separate pentru cele trei tipuri de funcŃii de apartenenŃă: triunghi, trapez şi gauss.
În urma prelucrării au fost obŃinute valori pentru Dalfa pentru fiecare valoare a lui alfa. Aceste valori obŃinute după prelucrarea cu ajutorul logicii fuzzy au fost comparate cu valorile ideale care ar fi trebuit să le obŃinem pentru liniarizarea caracteristicilor externe în domeniul conducŃiei întrerupte. Valoarea acestei erori - Eroarea = (Valoarea lui Dalfa obŃinută prin prelucrarea cu Fuzzy) - (Dalfa Ideal) - considerată în modul a fost reprezentată grafic separat pentru fiecare valoare a lui Dalfa Ideal cu ajutorul programului EXCEL ’97 sub WINDOWS ’98. Prezentăm la sfârşitul acestui capitol reprezentările grafice ale acestor erori. Fiecare grafic va conŃine în funcŃie de datele de intrare, trei curbe separate pentru cele trei tipuri de funcŃii de apartenenŃă: triunghi, trapez şi Gauss.
4.1.3. Concluzii finale privind strategia de proiectare a RF destinat liniarizării caracteristicii externe a convertoarelor c.a.-c.c. Modulul erorii de simulare fuzzy folosind programul Matlab a fost reprezentată grafic
separat pentru fiecare valoare a lui Dalfa ideal cu ajutorul programului EXCEL ’97 sub WINDOWS ’98. În urma acestor reprezentări s-au desprins următoarele concluzii:
1. funcŃiile de apartenenŃă de tip triunghi sunt cele mai indicate pentru proiectarea RF în domeniul electronicii de putere, cu unele constrângeri la capetele intervalului de reprezentare; 2. folosirea triunghiurilor isoscele şi echidistante ce se suprapun în proporŃie de 50% face ca în orice moment să fie active maxim 4 reguli din toată baza de reguli; 3. pentru capetele intervalelor sunt indicate funcŃiile de apartenenŃă de tip Gauss şi funcŃii de apartenenŃă nesimetrice şi neechidistante, ultimele indicate mai ales pentru regulatoarele de turaŃie şi curent; 4. metoda de defuzzificare denumită “metoda centrelor de simetrie” este cea mai indicată pentru regulatoarele care lucrează în timp real, deoarece timpul de calcul este minim; 5. în situaŃia în care în matricea bazei de reguli apar câmpuri libere, factorul de apartenenŃă la regula respectivă este zero, iar reglajul nu poate fi realizat; 6. folosirea a mai mult de 7 funcŃii de apartenenŃă pentru o variabilă nu introduce neliniarităŃi ci dimpotrivă ajută la mărirea preciziei de reglare mai ales în cazul unor mărimi cu o mare dinamică; 7. folosirea a mai mult de 11 funcŃii de apartenenŃă pentru o variabilă nu mai introduce îmbunătăŃiri semnificative în procesul de reglare şi duce la complicarea bazei de reguli.
4.2. PROIECTAREA RF PENTRU VARIATOARELE DE C.C.
4.2.1. Variatorul Buck În urma reprezentării grafice au fost interpolate din fiecare curbă pentru fiecare alfa valorile
lui n2I corespunzătoare unor valori DeltaD care ar produce liniarizarea caracteristicilor.Valorile
DeltaD corespunzãtoare curenŃilor n2I din fiecare câmp al tabelului ar produce prin adunare la valoarea D iniŃială liniarizarea caracteristicilor externe normate în domeniul conducŃiei întrerupte.
Tabel cu valorile lui n2I interpolate din graficul caracteristicii externe trasat cu Excel
n2I D 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
DeltaD 0 0.36 0,64 0,84 0,96 1 0,95 0,84 0,64 0,37 0.05 0,09 0,35 0,57 0,73 0,81 0,81 0,73 0,55 0,33 0,1 0,16 0,37 0,54 0,65 0,64 0,62 0,49 0,29 0,15 0,04 0,21 0,38 0,49 0,54 0,43 0,43 0,255 0,2 0,1 0,24 0,36 0,43 0,35 0,36 0,22
Raport de Cercetare 2011 - 37
0,25 0,03 0,14 0,25 0,33 0,26 0,3 0,19 0,3 0,06 0,16 0,24 0,22 0,25 0,16 0,35 0,02 0,1 0,16 0,15 0,21 0,14 0,4 0,05 0,12 0,12 0,17 0,12 0,45 0,06 0,08 0,13 0,11 0,5 0,03 0,05 0,09 0,08 0,55 0,02 0,06 0,05 0,6 0,05 0,025 0,65 0.02 0.02 0,7 0.01 0,01
4.2.1.1. Modelarea cu ajutorul logicii FUZZY
Controller-ul fuzzy pentru liniarizarea caracteristicilor externe normate are două intrări şi o ieşire. Cele două variabile de intrare sunt: 1. n2I cu valori cuprinse între 0 şi 1, 2. D cu valori cuprinse între 0.05 şi 0.95, Iar variabila de ieşire este DeltaD cu valori între 0 şi 0.7.
Pentru fuzzificare a fost aleasă metoda max-min. Pentru cele trei variabile (intrare şi ieşire) au fost alese funcŃii de apartenenŃă simetrice şi echidistante. FuncŃiile de apartenenŃă iau valori între 0 şi 1. Pentru modelarea convertorului au fost alese trei tipuri de funcŃii de apartenenŃă: triunghi, trapez şi Gauss. În urma acestui demers în final se va stabili care dintre cele trei tipuri este cel mai bun pentru aplicaŃia noastră, prin compararea erorilor.
Pentru fiecare variabilă a fost ales un număr diferit de funcŃii de apartenenŃă î26ş: 1. Pentru D: au fost alese 7 funcŃii de apartenenŃă. Aceste funcŃii de apartenenŃă sunt următoarele
în ordine crescătoare: NB,NM, NS, ZE, PS, PM, PB 2. Pentru n2I : au fost alese 9 funcŃii de apartenenŃă. Aceste funcŃii de apartenenŃă sunt
următoarele în ordine crescătoare: NVB, NB, NM, NS, ZE, PS, PM, PB, PVB. 3. Pemtru DeltaD: au fost alese 11 funcŃii de apartenenŃă. Aceste funcŃii de apartenenŃă sunt
următoarele în ordine crescătoare: NVB, NB, NM, NS, NVS, ZE, PVS, PS, PM, PB, PVB. În funcŃie de datele interpolate din reprezentările grafice ale caracteristicilor externe normate şi
de experienŃa practică privind funcŃionarea convertorului, dependenŃa DeltaD = f( n2I , D) a fost stabilită sub forma unei matrici de inferenŃă completă reprezentând baza de reguli conform căreia funcŃionează regulatorul.
Baza de reguli fuzzy pentru regulatorul fuzzy asociat variatorului Buck DeltaD D
NB NM NS ZE PS PM PB
n2I NVB NM NVS PVS PM PVB PVB NB NB NB NVS ZE PVS PS PS NM NM NVS NVS ZE NS NS NVB NB NB NS NM NS NVB ZE NB NM NM NB PS NVB NB NB NB NVB PM NB NB NB PB NVB NVB
PVB NVB NVB NVB
4.2.1.2. Cazul funcŃiilor de apartenenŃă TRIUNGHI Au fost alese triunghiuri isoscele simetrice şi echidistante ale căror baze se suprapun în
procent de 50%. Această alegere are avantajul major că pentru un set precis de valori ale mărimilor de intrare n2I şi D să nu fie active la un moment dat decât 4 reguli din întreaga bază de reguli.

Raport de Cercetare 2011 - 38
În urma defuzzificării cu metoda centrelor de simetrie s-au obŃinut următoarele rezultate pentru variabila de ieşire DeltaD. Prima coloană din tabel reprezintă valorile ideale ale lui DeltaD care ar fi de dorit să se obŃină pentru liniarizarea caracteristicilor.
Tabel cu valorile lui DeltaD obŃinute în urma simulrii cu regulator fuzzy DeltaD obŃinută prin simulare fuzzy cu Matlab
D 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
DeltaD Ideal
0 0,063 0,028 0,035 0,021 0,021 0,021 0,035 0,021 0,168 0,05 0,084 0,077 0,07 0,07 0,07 0,063 0,07 0,063 0,217 0,1 0,091 0,07 0,091 0,07 0,07 0,07 0,077 0,224 0,15 0,147 0,147 0,112 0,14 0,119 0,126 0,168 0,238 0,2 0,203 0,182 0,217 0,168 0,154 0,217 0,301 0,25 0,252 0,224 0,28 0,189 0,273 0,308 0,343 0,3 0,294 0,336 0,287 0,301 0,35 0,399 0,35 0,308 0,357 0,378 0,406 0,364 0,469 0,4 0,399 0,399 0,42 0,399 0,49 0,45 0,448 0,455 0,42 0,497 0.5 0,476 0,525 0,434 0,504 0,55 0,546 0,448 0,532 0,6 0,462 0,651 0,65 0,665 0,658 0,7 0,672 0,672
În următorul tabel este exprimată eroarea = (Valoarea obŃinută prin prelucrarea cu Fuzzy) - (DeltaD Ideal)
Tabel cu erorile de simulare Matlab Eroarea de simulare
D 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
DeltaD Ideal
0 0.063 0,028 0,035 0,021 0,021 0,021 0,035 0,021 0,168 0,05 0.034 0.027 0,02 0,02 0,02 0,013 0,02 0,013 0,167 0,1 -0,009 -0,03 -0,009 -0,03 -0,03 -0,03 -0,023 0,124 0,15 -0,003 -0,003 -0,038 -0,01 -0,031 -0,024 0,018 0,088 0,2 0,003 -0,018 0,017 -0,032 -0,046 0,017 0,101 0,25 0,002 -0,026 0,03 -0,061 0,023 0,058 0,093 0,3 -0,006 0,036 -0,013 0,001 0,05 0,099 0,35 -0,042 0,007 0,028 0,056 0,014 0,119 0,4 -0,001 -0,001 0,02 -0,001 0,09 0,45 -0,002 0,005 -0,03 0,047 0.5 -0,024 0,025 -0,066 0,004 0,55 -0,004 -0,102 -0,018 0,6 -0,138 0,051 0,65 0,015 0,008 0,7 -0,028 -0,028
SuprafaŃa de control este prezentată în fig.27.
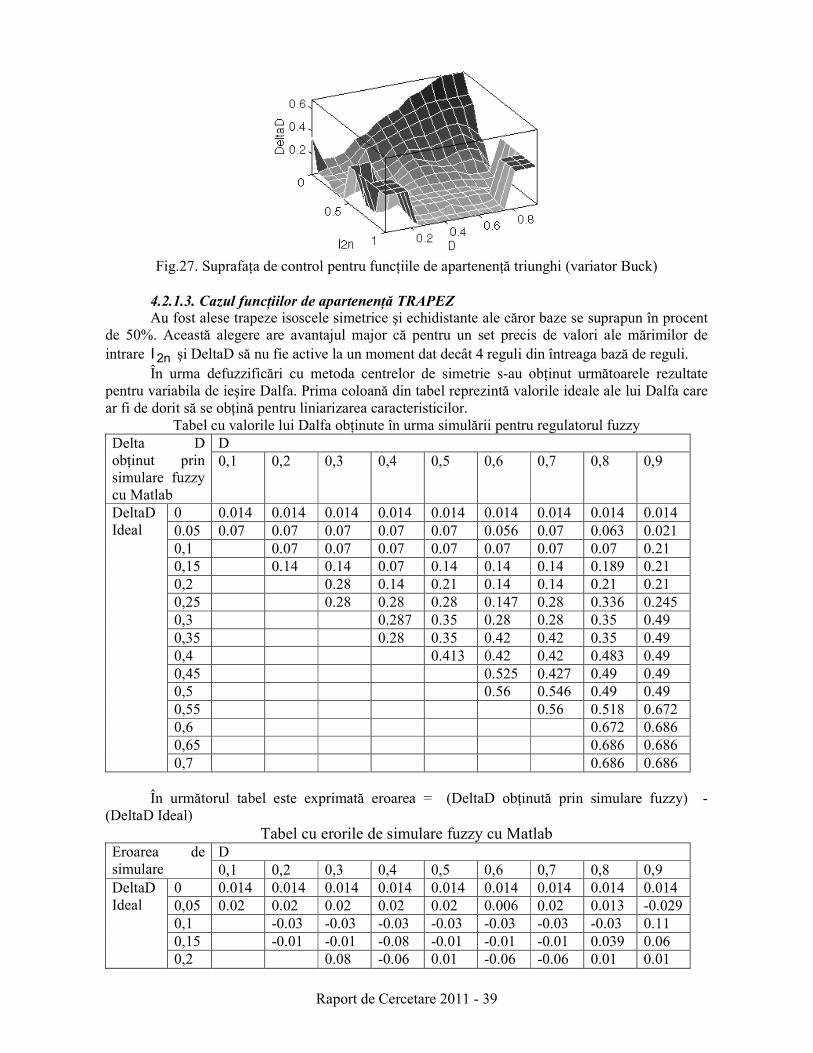
Raport de Cercetare 2011 - 39
Fig.27. SuprafaŃa de control pentru funcŃiile de apartenenŃă triunghi (variator Buck)
4.2.1.3. Cazul funcŃiilor de apartenenŃă TRAPEZ Au fost alese trapeze isoscele simetrice şi echidistante ale căror baze se suprapun în procent
de 50%. Această alegere are avantajul major că pentru un set precis de valori ale mărimilor de intrare n2I şi DeltaD să nu fie active la un moment dat decât 4 reguli din întreaga bază de reguli.
În urma defuzzificări cu metoda centrelor de simetrie s-au obŃinut următoarele rezultate pentru variabila de ieşire Dalfa. Prima coloană din tabel reprezintă valorile ideale ale lui Dalfa care ar fi de dorit să se obŃină pentru liniarizarea caracteristicilor.
Tabel cu valorile lui Dalfa obŃinute în urma simulării pentru regulatorul fuzzy Delta D obŃinut prin simulare fuzzy cu Matlab
D 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
DeltaD Ideal
0 0.014 0.014 0.014 0.014 0.014 0.014 0.014 0.014 0.014 0.05 0.07 0.07 0.07 0.07 0.07 0.056 0.07 0.063 0.021 0,1 0.07 0.07 0.07 0.07 0.07 0.07 0.07 0.21 0,15 0.14 0.14 0.07 0.14 0.14 0.14 0.189 0.21 0,2 0.28 0.14 0.21 0.14 0.14 0.21 0.21 0,25 0.28 0.28 0.28 0.147 0.28 0.336 0.245 0,3 0.287 0.35 0.28 0.28 0.35 0.49 0,35 0.28 0.35 0.42 0.42 0.35 0.49 0,4 0.413 0.42 0.42 0.483 0.49 0,45 0.525 0.427 0.49 0.49 0,5 0.56 0.546 0.49 0.49 0,55 0.56 0.518 0.672 0,6 0.672 0.686 0,65 0.686 0.686 0,7 0.686 0.686
În următorul tabel este exprimată eroarea = (DeltaD obŃinută prin simulare fuzzy) -
(DeltaD Ideal) Tabel cu erorile de simulare fuzzy cu Matlab
Eroarea de simulare
D 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
DeltaD Ideal
0 0.014 0.014 0.014 0.014 0.014 0.014 0.014 0.014 0.014 0,05 0.02 0.02 0.02 0.02 0.02 0.006 0.02 0.013 -0.029 0,1 -0.03 -0.03 -0.03 -0.03 -0.03 -0.03 -0.03 0.11 0,15 -0.01 -0.01 -0.08 -0.01 -0.01 -0.01 0.039 0.06 0,2 0.08 -0.06 0.01 -0.06 -0.06 0.01 0.01
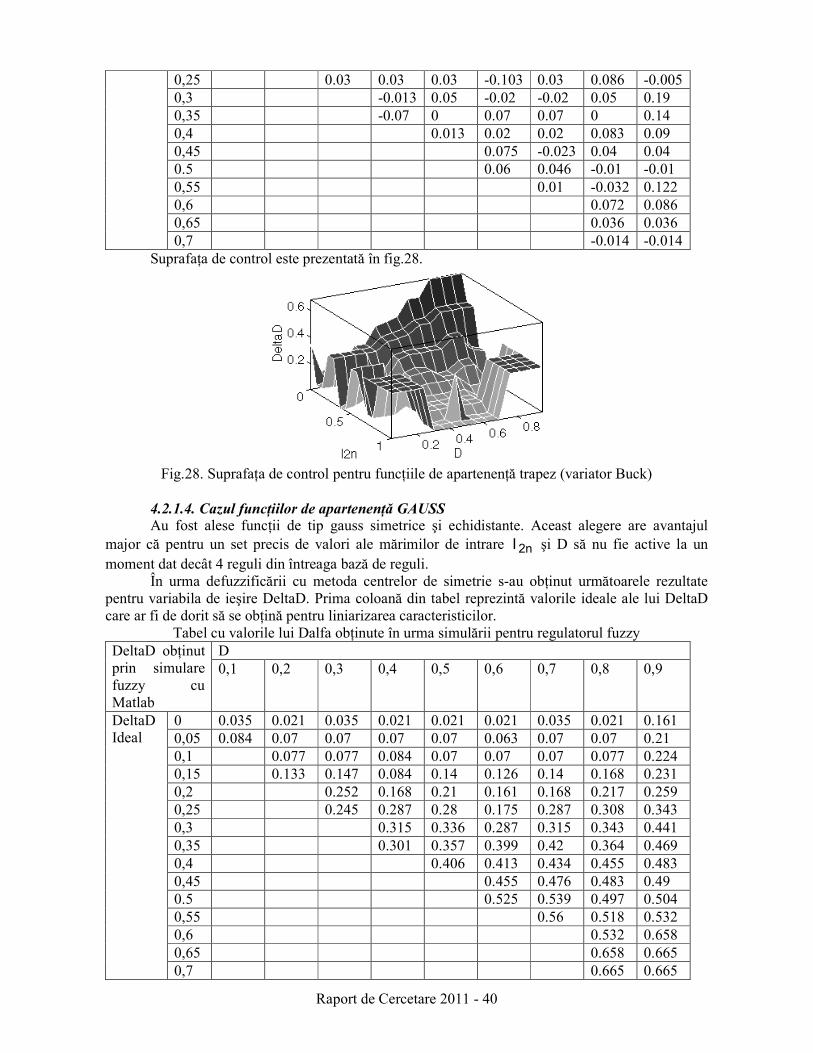
Raport de Cercetare 2011 - 40
0,25 0.03 0.03 0.03 -0.103 0.03 0.086 -0.005 0,3 -0.013 0.05 -0.02 -0.02 0.05 0.19 0,35 -0.07 0 0.07 0.07 0 0.14 0,4 0.013 0.02 0.02 0.083 0.09 0,45 0.075 -0.023 0.04 0.04 0.5 0.06 0.046 -0.01 -0.01 0,55 0.01 -0.032 0.122 0,6 0.072 0.086 0,65 0.036 0.036 0,7 -0.014 -0.014
SuprafaŃa de control este prezentată în fig.28.
Fig.28. SuprafaŃa de control pentru funcŃiile de apartenenŃă trapez (variator Buck)
4.2.1.4. Cazul funcŃiilor de apartenenŃă GAUSS Au fost alese funcŃii de tip gauss simetrice şi echidistante. Aceast alegere are avantajul
major că pentru un set precis de valori ale mărimilor de intrare n2I şi D să nu fie active la un moment dat decât 4 reguli din întreaga bază de reguli.
În urma defuzzificării cu metoda centrelor de simetrie s-au obŃinut următoarele rezultate pentru variabila de ieşire DeltaD. Prima coloană din tabel reprezintă valorile ideale ale lui DeltaD care ar fi de dorit să se obŃină pentru liniarizarea caracteristicilor.
Tabel cu valorile lui Dalfa obŃinute în urma simulării pentru regulatorul fuzzy DeltaD obŃinut prin simulare fuzzy cu Matlab
D 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
DeltaD Ideal
0 0.035 0.021 0.035 0.021 0.021 0.021 0.035 0.021 0.161 0,05 0.084 0.07 0.07 0.07 0.07 0.063 0.07 0.07 0.21 0,1 0.077 0.077 0.084 0.07 0.07 0.07 0.077 0.224 0,15 0.133 0.147 0.084 0.14 0.126 0.14 0.168 0.231 0,2 0.252 0.168 0.21 0.161 0.168 0.217 0.259 0,25 0.245 0.287 0.28 0.175 0.287 0.308 0.343 0,3 0.315 0.336 0.287 0.315 0.343 0.441 0,35 0.301 0.357 0.399 0.42 0.364 0.469 0,4 0.406 0.413 0.434 0.455 0.483 0,45 0.455 0.476 0.483 0.49 0.5 0.525 0.539 0.497 0.504 0,55 0.56 0.518 0.532 0,6 0.532 0.658 0,65 0.658 0.665 0,7 0.665 0.665
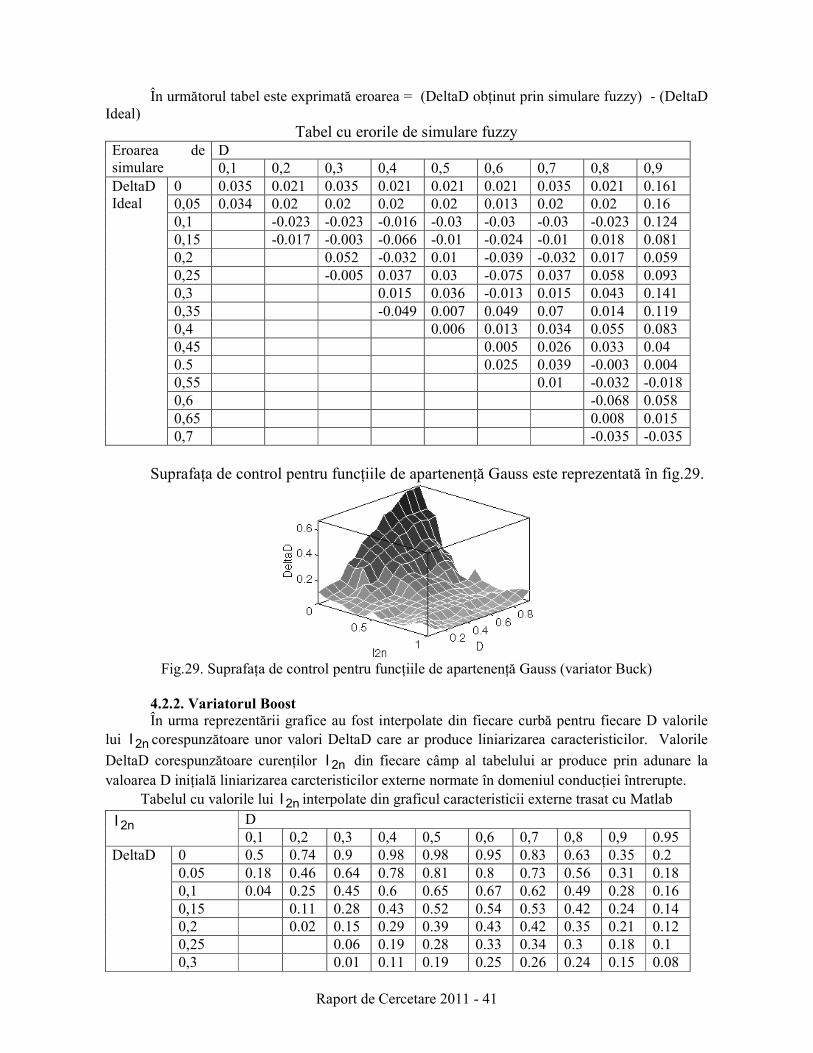
Raport de Cercetare 2011 - 41
În următorul tabel este exprimată eroarea = (DeltaD obŃinut prin simulare fuzzy) - (DeltaD
Ideal) Tabel cu erorile de simulare fuzzy
Eroarea de simulare
D 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
DeltaD Ideal
0 0.035 0.021 0.035 0.021 0.021 0.021 0.035 0.021 0.161 0,05 0.034 0.02 0.02 0.02 0.02 0.013 0.02 0.02 0.16 0,1 -0.023 -0.023 -0.016 -0.03 -0.03 -0.03 -0.023 0.124 0,15 -0.017 -0.003 -0.066 -0.01 -0.024 -0.01 0.018 0.081 0,2 0.052 -0.032 0.01 -0.039 -0.032 0.017 0.059 0,25 -0.005 0.037 0.03 -0.075 0.037 0.058 0.093 0,3 0.015 0.036 -0.013 0.015 0.043 0.141 0,35 -0.049 0.007 0.049 0.07 0.014 0.119 0,4 0.006 0.013 0.034 0.055 0.083 0,45 0.005 0.026 0.033 0.04 0.5 0.025 0.039 -0.003 0.004 0,55 0.01 -0.032 -0.018 0,6 -0.068 0.058 0,65 0.008 0.015 0,7 -0.035 -0.035
SuprafaŃa de control pentru funcŃiile de apartenenŃă Gauss este reprezentată în fig.29.
Fig.29. SuprafaŃa de control pentru funcŃiile de apartenenŃă Gauss (variator Buck)
4.2.2. Variatorul Boost În urma reprezentării grafice au fost interpolate din fiecare curbă pentru fiecare D valorile
lui n2I corespunzătoare unor valori DeltaD care ar produce liniarizarea caracteristicilor. Valorile
DeltaD corespunzătoare curenŃilor n2I din fiecare câmp al tabelului ar produce prin adunare la valoarea D iniŃială liniarizarea carcteristicilor externe normate în domeniul conducŃiei întrerupte.
Tabelul cu valorile lui n2I interpolate din graficul caracteristicii externe trasat cu Matlab
n2I D 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 0.95
DeltaD 0 0.5 0.74 0.9 0.98 0.98 0.95 0.83 0.63 0.35 0.2 0.05 0.18 0.46 0.64 0.78 0.81 0.8 0.73 0.56 0.31 0.18 0,1 0.04 0.25 0.45 0.6 0.65 0.67 0.62 0.49 0.28 0.16 0,15 0.11 0.28 0.43 0.52 0.54 0.53 0.42 0.24 0.14 0,2 0.02 0.15 0.29 0.39 0.43 0.42 0.35 0.21 0.12 0,25 0.06 0.19 0.28 0.33 0.34 0.3 0.18 0.1 0,3 0.01 0.11 0.19 0.25 0.26 0.24 0.15 0.08

Raport de Cercetare 2011 - 42
0,35 0.04 0.12 0.17 0.2 0.2 0.13 0.07 0,4 0.01 0.06 0.11 15 0.16 0.1 0.06 0,45 0.03 0.06 0.1 0.11 0.08 0.05 0,5 0.03 0.06 0.08 0.07 0.04 0,55 0.03 0.06 0.05 0.03 0,6 0.01 0.04 0.04 0.02
Controller-ul fuzzy pentru liniarizarea caracteristicilor externe normate are două intrări şi o
ieşire. Cele două variabile de intrare sunt: 1. n2I cu valori cuprinse între 0 şi 1, 2. D cu valori cuprinse între 0.1 şi 0.95, iar variabila de ieşire este DeltaD cu valori cuprinse între 0 şi 0.6.
Pentru fuzzificare a fost aleasã metoda max-min. Pentru cele trei variabile (intrare şi ieşire) au fost alese funcŃii de apartenenŃă simetrice şi echidistante. FuncŃiile de apartenenŃă iau valori între 0 şi 1. Pentru modelarea convertorului au fost alese trei tipuri de funcŃii de apartenenŃă: triunghi, trapez şi Gauss. În urma acestui demers în final se va stabili care dintre cele trei tipuri este cel mai bun pentru aplicaŃia noastră, prin compararea erorilor î27ş. Pentru fiecare variabilă a fost ales un număr diferit de funcŃii de apartenenŃă: 4. Pentru D: au fost alese 7 funcŃii de apartenenŃă. Aceste funcŃii de apartenenŃă sunt următoarele
în ordine crescătoare: NB, NM, NS, ZE, PS, PM, PB 5. Pentru n2I : au fost alese 9 funcŃii de apartenenŃă. Aceste funcŃii de apartenenŃă sunt
următoarele în ordine crescătoare: NVB, NB, NM, NS, ZE, PS, PM, PB, PVB. 6. Pentru DeltaD: au fost alese 11 funcŃii de apartenenŃă. Aceste funcŃii de apartenenŃă sunt
următoarele în ordine crescătoare: NVB, NB, NM, NS, NVS, ZE, PVS, PS, PM, PB, PVB. În funcŃie de datele interpolate din reprezentările grafice ale caracteristicilor externe normate şi de experienŃa practică privind funcŃionarea convertorului, dependenŃa DeltaD = f( n2I , D) a fost stabilită sub forma unei matrici de inferenŃă incompletă reprezentând baza de reguli conform căreia funcŃionează regulatorul.
Baza de reguli pentru regulatorul fuzzy a convertorului Boost DeltaD D
NB NM NS ZE PS PM PB
n2I NVB NM NVS PS PM PB PVB PB NB NB NS ZE PVS PS PS NS NM NM NS ZE PVS ZE NVB NS NM NS NVS NS NVB ZE NVB NM NM NM NM PS NB NM NM NM NVB PM NVB NB NB NB PB NVB NVB
PVB NVB NVB NVB 4.2.2.1. Cazul funcŃiilor de apartenenŃă TRIUNGHI Au fost alese triunghiuri isoscele simetrice şi echidistante ale căror baze se suprapun în
procent de 50%. Această alegere are avantajul major că pentru un set precis de valori ale mărimilor de intrare n2I şi D să nu fie active la un moment dat decât 4 reguli din întreaga bază de reguli.
În urma defuzzificării cu metoda centrelor de simetrie s-au obŃinut următoarele rezultate pentru variabila de ieşire DeltaD. Prima coloană din tabel reprezintă valorile ideale ale lui DeltaD care ar fi de dorit să se obŃină pentru liniarizarea caracteristicilor.

Raport de Cercetare 2011 - 43
Tabel cu valorile lui DeltaD obŃinute în urma simulării cu regulator fuzzy DeltaD obŃinut prin simulare fuzzy cu Matlab
D 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 0,95
DeltaD Ideal
0 0.018 0.024 0.018 0.018 0.018 0.018 0.042 0.018 0.168 0.144
0,05 0.06 0.108 0.078 0.06 0.06 0.054 0.066 0.096 0.192 0.162
0,1 0.108 0.12 0.12 0.12 0.114 0.102 0.114 0.126 0.192 0.168
0,15 0.162 0.138 0.126 0.12 0.12 0.108 0.168 0.258 0.174
0,2 0.21 0.192 0.174 0.174 0186 0.192 0.198 0.258 0.18
0,25 0.252 0.258 0.276 0.252 0.24 0.27 0.234 0.192
0,3 0.27 0.306 0.312 0.336 0.336 0.306 0.216 0.21
0,35 0.396 0.354 0.372 0.36 0.336 0.21 0.216
0,4 0.414 0.402 0.408 0.396 0.402 0.378 0.492
0,45 0.456 0.45 0.432 0.426 0.402 0.504
0.5 0.486 0.492 0.438 0.414 0.516
0,55 0.522 0.45 0.444 0.522
0,6 0.534 0.486 0.462 0.528
În următorul tabel este expirmată eroarea = (DeltaD obŃinută prin simulare fuzzy) -
(DeltaD Ideal) Tabel cu erorile de simulare Matlab
Eroarea de simulare
D 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 0,95
DeltaD Ideal
0 0.018 0.024 0.018 0.018 0.018 0.018 0.042 0.018 0.168 0.144 0,05 0.01 0.058 0.028 0.01 0.01 0.004 0.016 0.046 0.142 0.112 0,1 0.008 0.02 0.02 0.02 0.014 0.002 0.014 0.026 0.092 0.068 0,15 0.012 -0.012 -0.024 -0.03 -0.03 -0.042 0.018 0.108 0.024 0,2 0.01 -0.008 -0.026 -0.026 -0.014 -0.008 0.058 0.058 -0.02 0,25 0.002 0.008 0.026 0.002 -0.01 0.02 -0.016 -0.058 0,3 -0.03 0.006 0.012 0.036 0.036 0.006 -0.084 -0.09 0,35 0.046 0.004 0.022 0.01 -0.014 -0.14 -0.134 0,4 0.014 0.002 0.008 -0.004 0.002 -0.022 0.092 0,45 0.006 0 -0.018 -0.024 -0.048 0.054 0.5 -0.014 -0.008 -0.062 -0.086 0.016 0,55 -0.028 -0.1 -0.106 -0.028 0,6 -0.066 -0.114 -0.138 -0.072
SuprafaŃa de control este prezentată în fig.30.
Fig.30. SuprafaŃa de control pentru funcŃii de apartenenŃă triunghi (variatorul Boost)
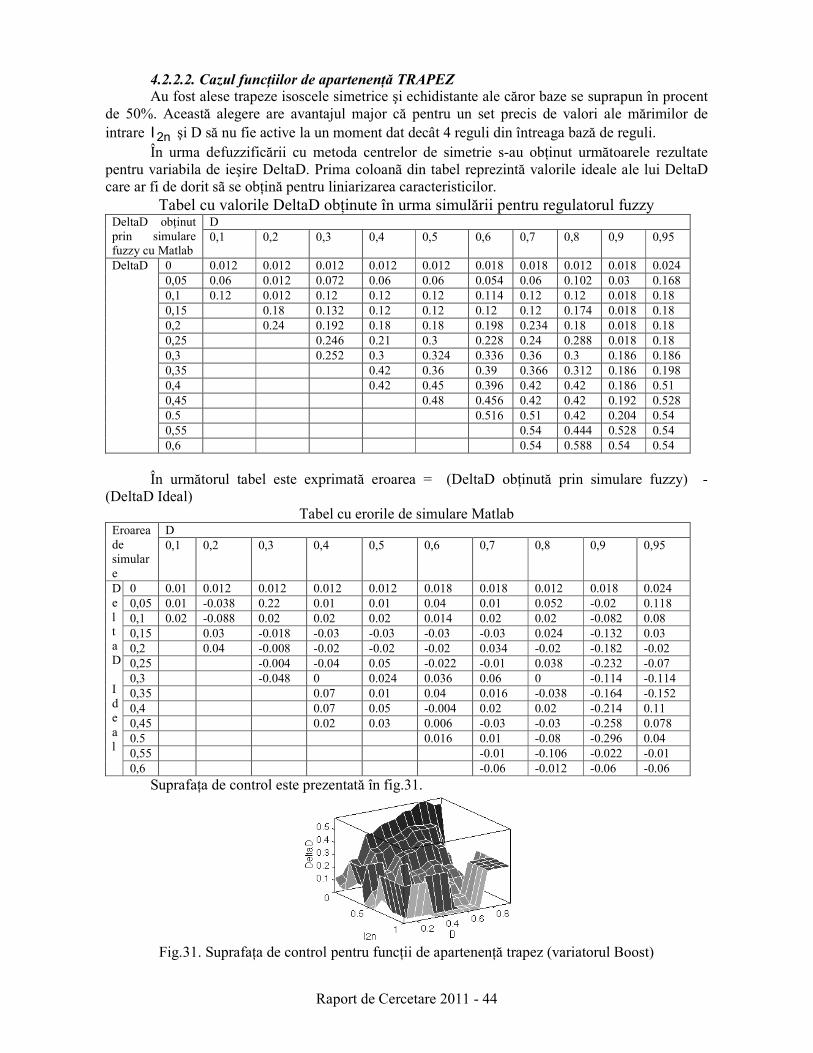
Raport de Cercetare 2011 - 44
4.2.2.2. Cazul funcŃiilor de apartenenŃă TRAPEZ Au fost alese trapeze isoscele simetrice şi echidistante ale căror baze se suprapun în procent de 50%. Această alegere are avantajul major că pentru un set precis de valori ale mărimilor de intrare n2I şi D să nu fie active la un moment dat decât 4 reguli din întreaga bază de reguli.
În urma defuzzificării cu metoda centrelor de simetrie s-au obŃinut următoarele rezultate pentru variabila de ieşire DeltaD. Prima coloanã din tabel reprezintă valorile ideale ale lui DeltaD care ar fi de dorit sã se obŃină pentru liniarizarea caracteristicilor.
Tabel cu valorile DeltaD obŃinute în urma simulării pentru regulatorul fuzzy DeltaD obŃinut prin simulare fuzzy cu Matlab
D 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 0,95
DeltaD 0 0.012 0.012 0.012 0.012 0.012 0.018 0.018 0.012 0.018 0.024 0,05 0.06 0.012 0.072 0.06 0.06 0.054 0.06 0.102 0.03 0.168 0,1 0.12 0.012 0.12 0.12 0.12 0.114 0.12 0.12 0.018 0.18 0,15 0.18 0.132 0.12 0.12 0.12 0.12 0.174 0.018 0.18 0,2 0.24 0.192 0.18 0.18 0.198 0.234 0.18 0.018 0.18 0,25 0.246 0.21 0.3 0.228 0.24 0.288 0.018 0.18 0,3 0.252 0.3 0.324 0.336 0.36 0.3 0.186 0.186 0,35 0.42 0.36 0.39 0.366 0.312 0.186 0.198 0,4 0.42 0.45 0.396 0.42 0.42 0.186 0.51 0,45 0.48 0.456 0.42 0.42 0.192 0.528 0.5 0.516 0.51 0.42 0.204 0.54 0,55 0.54 0.444 0.528 0.54 0,6 0.54 0.588 0.54 0.54
În următorul tabel este exprimată eroarea = (DeltaD obŃinută prin simulare fuzzy) -
(DeltaD Ideal) Tabel cu erorile de simulare Matlab
Eroarea de simulare
D 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 0,95
DeltaD Ideal
0 0.01 0.012 0.012 0.012 0.012 0.018 0.018 0.012 0.018 0.024 0,05 0.01 -0.038 0.22 0.01 0.01 0.04 0.01 0.052 -0.02 0.118 0,1 0.02 -0.088 0.02 0.02 0.02 0.014 0.02 0.02 -0.082 0.08 0,15 0.03 -0.018 -0.03 -0.03 -0.03 -0.03 0.024 -0.132 0.03 0,2 0.04 -0.008 -0.02 -0.02 -0.02 0.034 -0.02 -0.182 -0.02 0,25 -0.004 -0.04 0.05 -0.022 -0.01 0.038 -0.232 -0.07 0,3 -0.048 0 0.024 0.036 0.06 0 -0.114 -0.114 0,35 0.07 0.01 0.04 0.016 -0.038 -0.164 -0.152 0,4 0.07 0.05 -0.004 0.02 0.02 -0.214 0.11 0,45 0.02 0.03 0.006 -0.03 -0.03 -0.258 0.078 0.5 0.016 0.01 -0.08 -0.296 0.04 0,55 -0.01 -0.106 -0.022 -0.01 0,6 -0.06 -0.012 -0.06 -0.06
SuprafaŃa de control este prezentată în fig.31.
Fig.31. SuprafaŃa de control pentru funcŃii de apartenenŃă trapez (variatorul Boost)
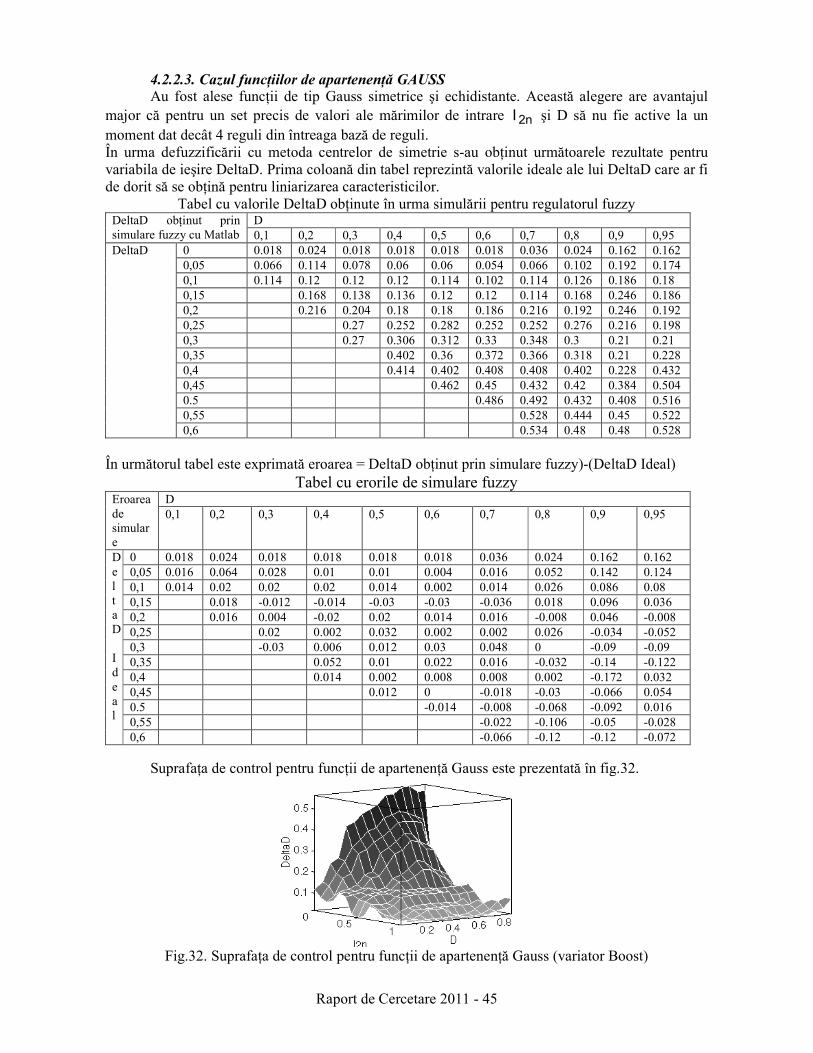
Raport de Cercetare 2011 - 45
4.2.2.3. Cazul funcŃiilor de apartenenŃă GAUSS Au fost alese funcŃii de tip Gauss simetrice şi echidistante. Această alegere are avantajul major că pentru un set precis de valori ale mărimilor de intrare n2I şi D să nu fie active la un moment dat decât 4 reguli din întreaga bază de reguli. În urma defuzzificării cu metoda centrelor de simetrie s-au obŃinut următoarele rezultate pentru variabila de ieşire DeltaD. Prima coloană din tabel reprezintă valorile ideale ale lui DeltaD care ar fi de dorit să se obŃină pentru liniarizarea caracteristicilor.
Tabel cu valorile DeltaD obŃinute în urma simulării pentru regulatorul fuzzy DeltaD obŃinut prin simulare fuzzy cu Matlab
D 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 0,95
DeltaD 0 0.018 0.024 0.018 0.018 0.018 0.018 0.036 0.024 0.162 0.162 0,05 0.066 0.114 0.078 0.06 0.06 0.054 0.066 0.102 0.192 0.174 0,1 0.114 0.12 0.12 0.12 0.114 0.102 0.114 0.126 0.186 0.18 0,15 0.168 0.138 0.136 0.12 0.12 0.114 0.168 0.246 0.186 0,2 0.216 0.204 0.18 0.18 0.186 0.216 0.192 0.246 0.192 0,25 0.27 0.252 0.282 0.252 0.252 0.276 0.216 0.198 0,3 0.27 0.306 0.312 0.33 0.348 0.3 0.21 0.21 0,35 0.402 0.36 0.372 0.366 0.318 0.21 0.228 0,4 0.414 0.402 0.408 0.408 0.402 0.228 0.432 0,45 0.462 0.45 0.432 0.42 0.384 0.504 0.5 0.486 0.492 0.432 0.408 0.516 0,55 0.528 0.444 0.45 0.522 0,6 0.534 0.48 0.48 0.528
În următorul tabel este exprimată eroarea = DeltaD obŃinut prin simulare fuzzy)-(DeltaD Ideal)
Tabel cu erorile de simulare fuzzy Eroarea de simulare
D 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 0,95
DeltaD Ideal
0 0.018 0.024 0.018 0.018 0.018 0.018 0.036 0.024 0.162 0.162 0,05 0.016 0.064 0.028 0.01 0.01 0.004 0.016 0.052 0.142 0.124 0,1 0.014 0.02 0.02 0.02 0.014 0.002 0.014 0.026 0.086 0.08 0,15 0.018 -0.012 -0.014 -0.03 -0.03 -0.036 0.018 0.096 0.036 0,2 0.016 0.004 -0.02 0.02 0.014 0.016 -0.008 0.046 -0.008 0,25 0.02 0.002 0.032 0.002 0.002 0.026 -0.034 -0.052 0,3 -0.03 0.006 0.012 0.03 0.048 0 -0.09 -0.09 0,35 0.052 0.01 0.022 0.016 -0.032 -0.14 -0.122 0,4 0.014 0.002 0.008 0.008 0.002 -0.172 0.032 0,45 0.012 0 -0.018 -0.03 -0.066 0.054 0.5 -0.014 -0.008 -0.068 -0.092 0.016 0,55 -0.022 -0.106 -0.05 -0.028 0,6 -0.066 -0.12 -0.12 -0.072
SuprafaŃa de control pentru funcŃii de apartenenŃă Gauss este prezentată în fig.32.
Fig.32. SuprafaŃa de control pentru funcŃii de apartenenŃă Gauss (variator Boost)

Raport de Cercetare 2011 - 46
4.2.3. Variatorul Buck – Boost În urma reprezentării grafice din fig.32 au fost interpolate din fiecare curbă pentru fiecare D
valorile lui n2I corespunzătoare unor valori DeltaD care ar produce liniarizarea caracteristicilor.
Valorile DeltaD corespunzătoare curenŃilor n2I din fiecare câmp al tabelului ar produce prin adunare la valoarea D iniŃială liniarizarea carcteristicilor externe normate în domeniul conducŃiei întrerupte.
Tabel cu valorile lui n2I interpolate din graficul caracteristicii externe trasat cu Excel:
n2I D 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 0,95
DeltaD 0 0.35 0.62 0.83 0.95 0.99 0.95 0.83 0.63 0.35 0.18 0.05 0.07 0.34 0.57 0.73 0.8 0.79 0.72 0.55 0.31 0.17 0,1 0.15 0.36 0.54 0.63 0.64 0.62 0.48 0.28 0.15 0,15 0.03 0.2 0.37 0.48 0.51 0.52 0.42 0.25 0.13 0,2 0.09 0.24 0.36 0.4 0.43 0.35 0.21 0.12 0,25 0.02 0.13 0.24 0.3 0.35 0.24 0.18 0.1 0,3 0.06 0.16 0.22 0.27 0.2 0.15 0.08 0,35 0.01 0.08 0.15 0.21 0.15 0.13 0.07 0,4 0.03 0.09 0.1 0.12 0.11 0.06 0,45 0.01 0.05 0.06 0.09 0.09 0.05 0,5 0.02 0.03 0.06 0.07 0.04 0,55 0.01 0.04 0.05 0.03 0,6 0.02 0.04 0.02
Controller-ul fuzzy pentru liniarizarea caracteristicilor externe normate are două intrări şi o
ieşire. Cele două variabile de intrare sunt: 1. n2I cu valori cuprinse între 0 şi 1, 2. D cu valori cuprinse între 0.1 şi 0.95, iar variabila de ieşire este DeltaD cu valori cuprinse între 0 şi 0.6. Pentru fuzzificare a fost aleasă metoda max-min. Pentru cele trei variabile (intrare şi ieşire) au fost alese funcŃii de apartenenŃă simetrice şi echidistante. FuncŃiile de apartenenŃă iau valori între 0 şi 1. Pentru modelarea convertorului au fost alese trei tipuri de funcŃii de apartenenŃă: triunghi, trapez şi gauss. În urma acestui demers în final se va stabili care dintre cele trei tipuri este cel mai bun pentru aplicaŃia noastră, prin compararea erorilor. Pentru fiecare variabilă a fost ales un număr diferit de funcŃii de apartenenŃă: 1. Pentru D: au fost alese 7 funcŃii de apartenenŃă. Aceste funcŃii de apartenenŃă sunt următoarele
în ordine crescãtoare: NB, NM, NS, ZE, PS, PM, PB 2. Pentru n2I : au fost alese 9 funcŃii de apartenenŃă. Aceste funcŃii de apartenenŃă sunt
următoarele în ordine crescãtoare: NVB, NB, NM, NS, ZE, PS, PM, PB, PVB. 3. Pentru DeltaD: au fost alese 11 funcþii de apartenenŃă. Aceste funcŃii de apartenenŃă sunt
următoarele în ordine crescătoare: NVB, NB, NM, NS, NVS, ZE, PVS, PS, PM, PB, PVB. În funcŃie de datele interpolate din reprezentările grafice ale caracteristicilor externe normate şi
de experienŃa practică privind funcŃionarea convertorului, dependenŃa DeltaD = f( n2I ,D) a fost stabilită sub forma unei matrici de inferenŃă incompletă reprezentând baza de reguli conform căreia funcŃionează regulatorul. Baza de reguli pentru regulatorul fuzzy ataşat convertorului Buck - Boost DeltaD D
NB NM NS ZE PS PM PB
n2I NVB NB NVS PVS PS PB PVB PM NB NM NVS PVS PS PS NVB NM NM NS NVS PVS NVS NS

Raport de Cercetare 2011 - 47
NS NVB NM NM NS NVS NS NVB ZE NM NM NM NB PS NVB NM NM NVB PM NB NB NB PB NVB NVB PVB NVB NVB NVB
4.2.3.1. Cazul funcŃiilor de apartenenŃă TRIUNGHI Au fost alese triunghiuri isoscele simetrice şi echidistante ale căror baze se suprapun în
procent de 50%. Această alegere are avantajul major că pentru un set precis de valori ale mărimilor de intrare n2I şi D să nu fie active la un moment dat decât 4 reguli din întreaga bază de reguli.
În urma defuzzificări cu metoda centrelor de simetrie s-au obŃinut următoarele rezultate pentru variabila de ieşire DeltaD. Prima coloană din tabel reprezintă valorile ideale ale lui DeltaD care ar fi de dorit să se obŃină pentru liniarizarea caracteristicilor.
Tabel cu valorile lui DeltaD obŃinute în urma simulării cu regulator fuzzy DeltaD obŃinut prin simulare fuzzy cu Matlab
D 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 0.95
DeltaD Ideal
0 0.018 0.018 0.042 0.018 0.018 0.018 0.042 0.018 0.156 0.15 0,05 0.06 0.108 0.09 0.066 0.06 0.54 0.66 0.6 0.18 0.144 0,1 0.12 0.126 0.12 0.12 0.114 0.114 0.072 0.186 0.036 0,15 0.204 0.168 0.126 0.126 0.12 0.108 0.156 0.198 0.018 0,2 0.198 0.186 0.18 0.198 0.162 0.192 0.21 0.018 0,25 0.246 0.24 0.24 0.264 0.24 0.246 0.216 0.036 0,3 0.324 0.33 0.33 0.33 0.276 0.228 0.444 0,35 0.36 0.36 0.372 0.354 0.402 0.294 0.45 0,4 0.396 0.42 0.426 0.42 0.402 0.456 0,45 0.408 0.444 0.456 0.432 0.426 0.462 0.5 0.462 0.51 0.45 0.45 0.468 0,55 0.522 0.486 0.462 0.474 0,6 0.564 0.468 0.474
În următorul tabel este exprimată eroarea = (DeltaD obŃinut prin simulare fuzzy) - (DeltaD Ideal)
Tabel cu erorile de simulare Matlab Eroarea de simulare
D 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 0,95
DeltaD Ideal
0 0.018 0.018 0.042 0.018 0.018 0.018 0.042 0.018 0.156 0.15 0,05 0.01 0.058 0.04 0.016 0.01 0.004 0.016 0.01 0.13 0.094 0,1 0.02 0.026 0.02 0.02 0.014 0.014 -0.028 0.086 -0.414 0,15 0.054 0.018 -0.024 -0.024 -0.03 -0.042 0.006 0.048 -0.132 0,2 -0.002 -0.014 -0.02 -0.002 -0.038 -0.008 0.01 -0.182 0,25 -0.004 -0.01 -0.01 0.014 -0.009 -0.004 -0.034 -0.214 0,3 0.024 0.03 0.03 0.03 -0.024 -0.072 0.144 0,35 0.01 0.01 0.022 0.004 0.052 -0.056 0.1 0,4 -0.004 0.02 0.026 0.02 0.002 0.056 0,45 -0.042 -0.006 0.006 -0.018 -0.024 0.012 0.5 -0.038 0.01 -0.05 -0.05 -0.032 0,55 -0.028 -0.064 -0.088 -0.076 0,6 -0.036 -0.132 -0.126
SuprafaŃa de control este prezentată în fig.33.
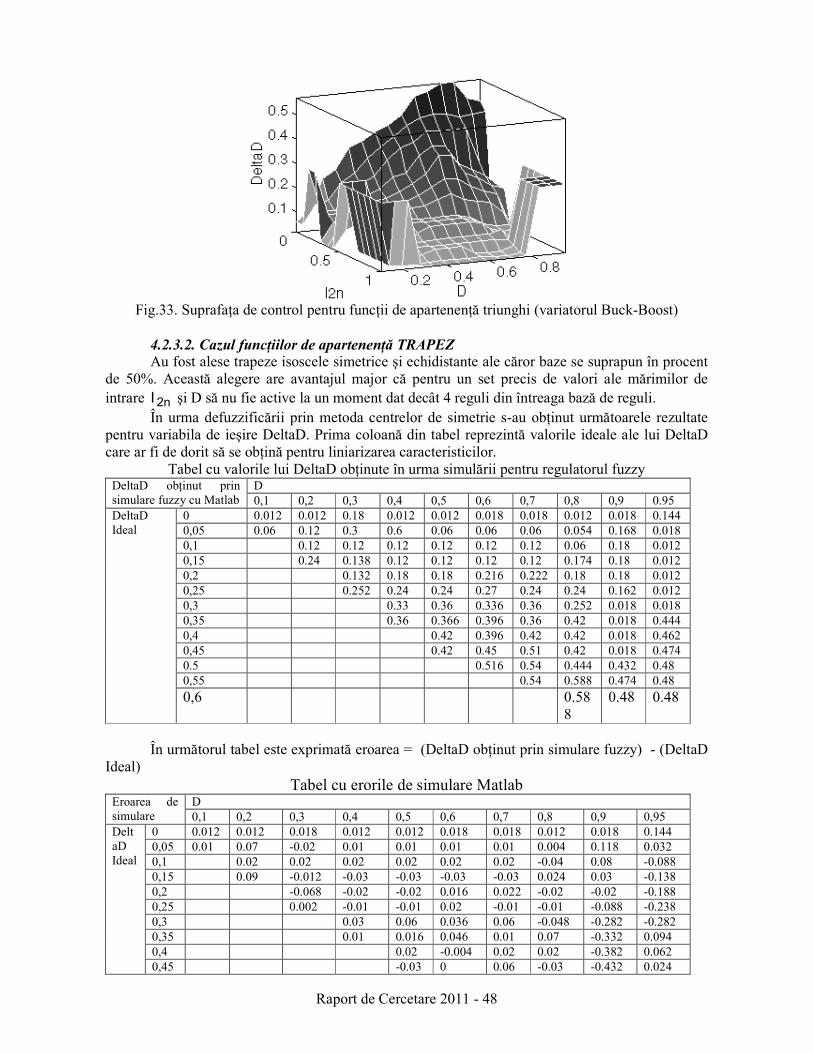
Raport de Cercetare 2011 - 48
Fig.33. SuprafaŃa de control pentru funcŃii de apartenenŃă triunghi (variatorul Buck-Boost)
4.2.3.2. Cazul funcŃiilor de apartenenŃă TRAPEZ Au fost alese trapeze isoscele simetrice şi echidistante ale căror baze se suprapun în procent
de 50%. Această alegere are avantajul major că pentru un set precis de valori ale mărimilor de intrare n2I şi D să nu fie active la un moment dat decât 4 reguli din întreaga bază de reguli.
În urma defuzzificării prin metoda centrelor de simetrie s-au obŃinut următoarele rezultate pentru variabila de ieşire DeltaD. Prima coloană din tabel reprezintă valorile ideale ale lui DeltaD care ar fi de dorit să se obŃină pentru liniarizarea caracteristicilor.
Tabel cu valorile lui DeltaD obŃinute în urma simulării pentru regulatorul fuzzy DeltaD obŃinut prin simulare fuzzy cu Matlab
D 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 0.95
DeltaD Ideal
0 0.012 0.012 0.18 0.012 0.012 0.018 0.018 0.012 0.018 0.144 0,05 0.06 0.12 0.3 0.6 0.06 0.06 0.06 0.054 0.168 0.018 0,1 0.12 0.12 0.12 0.12 0.12 0.12 0.06 0.18 0.012 0,15 0.24 0.138 0.12 0.12 0.12 0.12 0.174 0.18 0.012 0,2 0.132 0.18 0.18 0.216 0.222 0.18 0.18 0.012 0,25 0.252 0.24 0.24 0.27 0.24 0.24 0.162 0.012 0,3 0.33 0.36 0.336 0.36 0.252 0.018 0.018 0,35 0.36 0.366 0.396 0.36 0.42 0.018 0.444 0,4 0.42 0.396 0.42 0.42 0.018 0.462 0,45 0.42 0.45 0.51 0.42 0.018 0.474 0.5 0.516 0.54 0.444 0.432 0.48 0,55 0.54 0.588 0.474 0.48
0,6 0.588
0.48 0.48
În următorul tabel este exprimată eroarea = (DeltaD obŃinut prin simulare fuzzy) - (DeltaD
Ideal) Tabel cu erorile de simulare Matlab
Eroarea de simulare
D 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 0,95
DeltaD Ideal
0 0.012 0.012 0.018 0.012 0.012 0.018 0.018 0.012 0.018 0.144 0,05 0.01 0.07 -0.02 0.01 0.01 0.01 0.01 0.004 0.118 0.032 0,1 0.02 0.02 0.02 0.02 0.02 0.02 -0.04 0.08 -0.088 0,15 0.09 -0.012 -0.03 -0.03 -0.03 -0.03 0.024 0.03 -0.138 0,2 -0.068 -0.02 -0.02 0.016 0.022 -0.02 -0.02 -0.188 0,25 0.002 -0.01 -0.01 0.02 -0.01 -0.01 -0.088 -0.238 0,3 0.03 0.06 0.036 0.06 -0.048 -0.282 -0.282 0,35 0.01 0.016 0.046 0.01 0.07 -0.332 0.094 0,4 0.02 -0.004 0.02 0.02 -0.382 0.062 0,45 -0.03 0 0.06 -0.03 -0.432 0.024

Raport de Cercetare 2011 - 49
0.5 0.016 0.03 -0.056 -0.068 -0.02 0,55 -0.01 0.038 -0.076 -0.07 0,6 -0.012 -0.12 -0.12
SuprafaŃa de control este prezentată în fig.34.
Fig.34. SuprafaŃa de control pentru funcŃii de apartenenŃă trapez (variatorul Buck-Boost)
4.2.3.3. Cazul funcŃiilor de apartenenŃă GAUSS Au fost alese funcŃii de tip gauss simetrice şi echidistante. Această alegere are avantajul
major că pentru un set precis de valori ale mărimilor de intrare n2I şi D să nu fie active la un moment dat decât 4 reguli din întreaga bază de reguli.
În urma defuzzificări cu metoda centrelor de simetrie s-au obŃinut următoarele rezultate pentru variabila de ieşire DeltaD. Prima coloană din tabel reprezintă valorile ideale ale lui DeltaD care ar fi de dorit să se obŃină pentru liniarizarea caracteristicilor.
Tabel cu valorile lui DeltaD obŃinute în urma simulării cu regulator fuzzy DeltaD obŃinut prin simulare fuzzy cu Matlab
D 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 0.95
DeltaD Ideal
0 0.018 0.018 0.036 0.018 0.018 0.018 0.036 0.024 0.15 0.162 0,05 0.072 0.114 0.084 0.066 0.06 0.06 0.066 0.06 0.174 0.156 0,1 0.12 0.126 0.12 0.12 0.114 0.114 0.072 0.186 0.114 0,15 0.216 0.162 0.126 0.126 0.126 0.114 0.162 0.198 0.042 0,2 0.204 0.186 0.18 0.204 0.18 0.192 0.204 0.042 0,25 0.258 0.246 0.24 0.264 0.246 0.246 0.21 0.054 0,3 0.318 0.3 0.33 0.342 0.264 0.222 0.42 0,35 0.354 0.36 0.378 0.354 0.402 0.258 0.444 0,4 0.402 0.414 0.432 0.414 0.384 0.456 0,45 0.408 0.444 0.492 0.426 0.414 0.462 0.5 0.462 0.528 0.444 0.444 0.468 0,55 0.534 0.498 0.462 0.474 0,6 0.564 0.468 0.474
În următorul tabel este exprimată eroarea = (DeltaD obŃinut prin simulare fuzzy) - (DeltaD
Ideal) Tabel cu erorile de simulare Matlab
Eroarea de simulare
D 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 0,95
DeltaD Ideal
0 0.018 0.018 0.036 0.018 0.018 0.018 0.036 0.024 0.15 0.162 0,05 0.022 0.064 0.034 0.016 0.01 0.01 0.016 0.01 0.124 0.106 0,1 0.02 0.026 0.02 0.02 0.014 0.014 -0.028 0.086 0.014 0,15 0.066 0.012 -0.024 -0.024 -0.024 -0.036 0.012 0.048 -0.108 0,2 0.004 -0.014 -0.02 0.004 -0.02 -0.08 0.004 -0.158 0,25 0.008 -0.004 -0.01 0.014 -0.004 -0.004 -0.04 -0.196 0,3 0.018 0 0.03 0.042 -0.036 -0.078 0.12
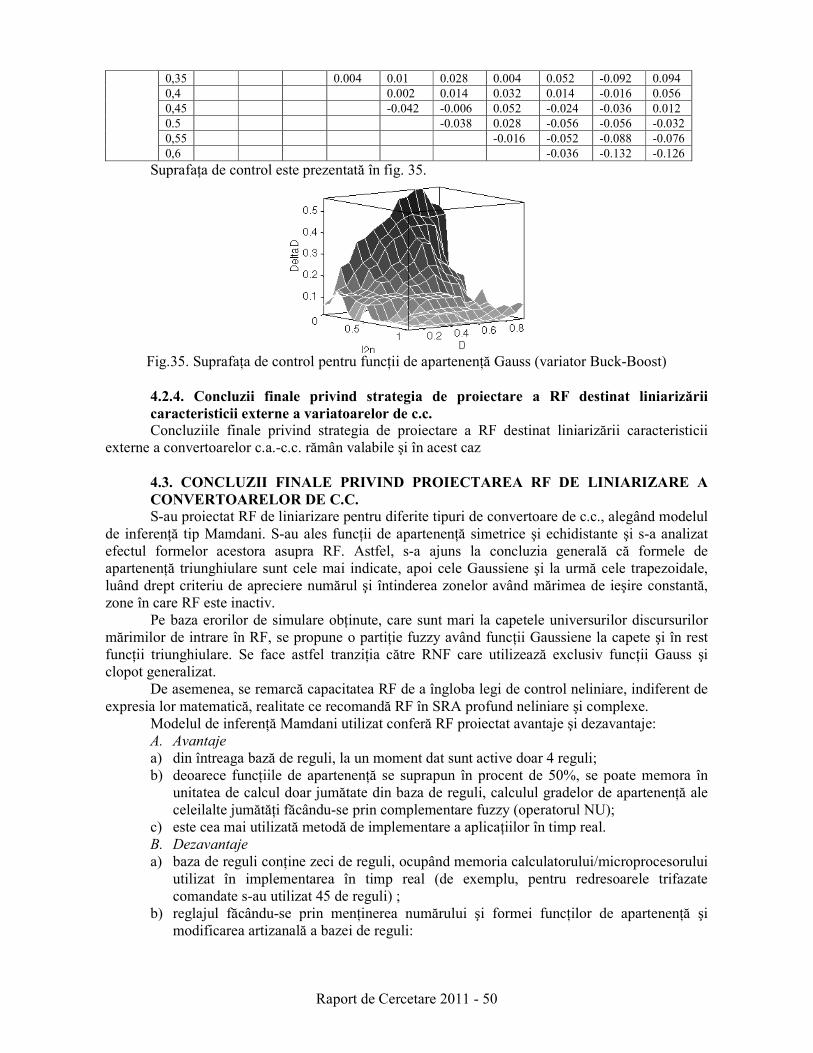
Raport de Cercetare 2011 - 50
0,35 0.004 0.01 0.028 0.004 0.052 -0.092 0.094 0,4 0.002 0.014 0.032 0.014 -0.016 0.056 0,45 -0.042 -0.006 0.052 -0.024 -0.036 0.012 0.5 -0.038 0.028 -0.056 -0.056 -0.032 0,55 -0.016 -0.052 -0.088 -0.076 0,6 -0.036 -0.132 -0.126
SuprafaŃa de control este prezentată în fig. 35.
Fig.35. SuprafaŃa de control pentru funcŃii de apartenenŃă Gauss (variator Buck-Boost)
4.2.4. Concluzii finale privind strategia de proiectare a RF destinat liniarizării caracteristicii externe a variatoarelor de c.c.
Concluziile finale privind strategia de proiectare a RF destinat liniarizării caracteristicii externe a convertoarelor c.a.-c.c. rămân valabile şi în acest caz
4.3. CONCLUZII FINALE PRIVIND PROIECTAREA RF DE LINIARIZARE A CONVERTOARELOR DE C.C. S-au proiectat RF de liniarizare pentru diferite tipuri de convertoare de c.c., alegând modelul
de inferenŃă tip Mamdani. S-au ales funcŃii de apartenenŃă simetrice şi echidistante şi s-a analizat efectul formelor acestora asupra RF. Astfel, s-a ajuns la concluzia generală că formele de apartenenŃă triunghiulare sunt cele mai indicate, apoi cele Gaussiene şi la urmă cele trapezoidale, luând drept criteriu de apreciere numărul şi întinderea zonelor având mărimea de ieşire constantă, zone în care RF este inactiv.
Pe baza erorilor de simulare obŃinute, care sunt mari la capetele universurilor discursurilor mărimilor de intrare în RF, se propune o partiŃie fuzzy având funcŃii Gaussiene la capete şi în rest funcŃii triunghiulare. Se face astfel tranziŃia către RNF care utilizează exclusiv funcŃii Gauss şi clopot generalizat.
De asemenea, se remarcă capacitatea RF de a îngloba legi de control neliniare, indiferent de expresia lor matematică, realitate ce recomandă RF în SRA profund neliniare şi complexe.
Modelul de inferenŃă Mamdani utilizat conferă RF proiectat avantaje şi dezavantaje: A. Avantaje
a) din întreaga bază de reguli, la un moment dat sunt active doar 4 reguli; b) deoarece funcŃiile de apartenenŃă se suprapun în procent de 50%, se poate memora în
unitatea de calcul doar jumătate din baza de reguli, calculul gradelor de apartenenŃă ale celeilalte jumătăŃi făcându-se prin complementare fuzzy (operatorul NU);
c) este cea mai utilizată metodă de implementare a aplicaŃiilor în timp real. B. Dezavantaje
a) baza de reguli conŃine zeci de reguli, ocupând memoria calculatorului/microprocesorului utilizat în implementarea în timp real (de exemplu, pentru redresoarele trifazate comandate s-au utilizat 45 de reguli) ;
b) reglajul făcându-se prin menŃinerea numărului şi formei funcŃilor de apartenenŃă şi modificarea artizanală a bazei de reguli:

Raport de Cercetare 2011 - 51
♦ simulările sunt valabile pentru zone mai mult sau mai puŃin restrânse din toată gama de variaŃie a mărimilor de intrare (de exemplu, pentru redresorul trifazat comandat în punte, Idn e cuprins în gama 0 – 0,08 şi alfa în gama 10 – 90 grade;
♦ metoda de proiectare este nesistematică, proiectarea durând şi rezultatele fiind aleatoare ca performaŃă;
c) erorile de simulare sunt variabile în game mari, uneori 0, alteori ajungând la peste 30% (de exemplu, proiectarea RF de liniarizare a variatorului Buck cu funcŃii de apartenenŃă triunghiulare).
5. PROIECTAREA RF FOLOSIND MODELUL SUGENO DE INFERENTA FUZZY, PRIN METODA INTERPOLARII. COMPARATIE CU RF REALIZAT CU MODELUL MAMDANI. OPTIMIZAREA PROIECTARII RF PRIN UTILIZAREA SISTEMELOR EXPERT (SE).
Proiectarea s-a facut in doua variante: A. pentru una sau mai multe curbe din familia de caracteristici externe ale variatorului de
c.c., in ideea reglarii in trepte (una sau cateva valori fixe) ale turatiei motorului de c.c. B. pentru intreaga familie de caracteristici externe, pentru reglarea continua a turatiei
motorului de c.c. in intreaga gama posibila, anume de la valoarea zero la valoarea maxima posibila (in cazul chopperelui Buck ea corespunzand alimentarii motorului cu intreaga tensiune a sursei continue de alimentare, iar in cazul chopperelor Boost si Buck-Boost ea fiind determinata de valoarea minima a curentului normat prin motor, n2I ).
in continuare, descriem proiectarea controllerelui fuzzy in cele doua variante.
5.1. PROIECTAREA RF PENTRU O UNICA CURBA Pentru toate topologiile de baza ale variatoarelor de c.c. (Buck, Boost si Buck-Boost), s-a urmat strategia generala de proiectare a RF:
5.1.1. Faza de proiectare a blocului de codificare fuzzy Aceasta faza cuprinde 3 etape: a) conversia analog-digitala a marimilor de intrare masurate; b) prelucrarea marimilor masurate puternic perturbate; c) prelucrarea fuzzy a marimilor de intrare.
in proiectarea RF fiind folosit un program de simulare de firma, etapa de conversie analog-digitala dispare deoarece prelucrarea hard prin procesoare fuzzy evident nu exista, iar prelucrarea soft (programele sursa) nu sunt accesibile utilizatorului si nici nu sunt necesare. Etapa a doua de extragere din zgomot a semnalelor de intrare apare ca necesara doar in cazul existentei unui proces real ce trebuie controlat. in concluzie, in continuare vom detalia numai etapa a treia, de fuzzificare propriuzisa, care cuprinde: 1. definirea marimilor de intrare si iesire in/din RF de liniarizare
Considerat ca o “cutie neagra”, RF de liniarizare are ca marimi de intrare raportul de conductie D al convertorului si curentul normat prin sarcina n2I , iar ca marime de iesire valoarea D∆ cu care trebuie modificat raportul de conductie D la trecerea convertorului din regim de conductie neantrerupta a curentului prin sarcina in regim de conductie intrerupta. in cazul proiectarii RF pentru o singura curba, marimea de intrare D va fi considerata parametru si va lua acea valoare constanta care sa asigure in regim de curent neantrerupt alimentarea motorului cu acea valoare medie ce ii asigura functionarea la turatia dorita. Ca exemple, rezultatele simularilor de la sfarsitul acestui capitol prezinta curbele N liniarizate in care alegerea parametrilor D s-a facut arbitrar din multimea

Raport de Cercetare 2011 - 52
D 0,9 0,75, 0,5, 0,3, ,1,0∈ . Evident, se pot alege orice alte valori [ ]1 ,0D∈ , rezultatele obtinuite fiind similare. 2. normarea marimilor de intrare
Dupa cum s-a precizat, acest pas de inscriere a marimilor de intrare in domeniul [ ]1 ,0 sau
[ ]1 ,1− nu este absolut necesar. Mai mult, el este imposibil de efectuat pentru cazurile cand valorile de regim tranzitoriu sunt mari (ca in cazul variatoarelor Boost si Buck – Boost pentru curenti n2I apropiati de valoarea zero ce corespunde pornirii motorului de c.c.) sau cand gama de valori ale marimilor este infinita, iar in cazul nostru, teoretic toata gama de variatie a curentului este [ )∞∈ ,0I n2 , practic ea este limitata de regulatorul de curent RC.
in cazul nostru, acest pas este deja efectuat deoarece raportul de conductie [ )1 ,0D∈ prin insusi definitia lui, expresia marimii D∆ fiind:
−=<
−⋅
−=∆
restin ,0
)1(4I ,12
1lim,22n
2 DDIdacaD
IDD
D nn
pentru toate tipurile de convertoare, rezulta D∆ [ )1 ,0∈ , iar proiectarea fiind limitata doar pentru regimul de conductie discontinua a curentului prin sarcina gama de variatie a curentului este in acest caz ( ]1 ,0I n2 ∈ , toate aceste aceste game reprezentand chiar universurile discursului marimilor de intrare si iesire din RF. 3.codificarea fuzzy propriuzisa
Este etapa de baza in faza de proiectare a blocului de codare fuzzy si consta in alegerea formei, numarului functiilor de apartenenta in care sunt impartite toate universurile discursurilor, precum si reprezentarea grafica a gradelor de apartenenta numita partitie fuzzy.
1) alegerea formei functiilor de apartenenta
in cazul nostru, s-a studiat efectul formei functiilor de apartenenta asupra performantelor de liniarizare a curbelor. Astfel, s-au probat urmatoarele forme ale functiilor de apartenenta alese simetrice si echidistante, oferite de Fuzzy Toolbox din MatLab: • functia curba Gauss, notata gaussmf, avand expresia matematica:
( )
σ
−−=σ
2
2
2
cxexp)c,,x(f ,
in care parametrul c localizeaza centrul curbei (media), iar parametrul σ indica latimea curbei (dispersia). • functia combinatie de doua curbe Gauss, notata gauss2mf, avand expresia matematica:
( )
( )
>
−−
<<
<
−−
=
22
22
21
12
21
c xdaca ,2
exp
c daca 1,
c xdaca ,2
exp
),,(
σ
σ
σ
cx
cx
cx
cxf ;
• functia clopot generalizata, notata gbellmf, avand expresia matematica:
b2
a
cx1
1)c,b,a,x(f
−+
= ,
in care parametrul b este de regula pozitiv, iar parametrul c localizeaza centrul curbei
• functia diferenta intre doua sigmoide, notata dsigmf, stiind ca expresia matematica a functiei sigmoidale, notata sigmf, este:

Raport de Cercetare 2011 - 53
( )[ ]cxaexp1
1)c,a,x(f
−−+=
• functia produs de doua sigmoide, notata psigmf • functia curba PI, notata pimf, bazata pe curba spline, de parametri a si d care localizeaza
“picioarele” curbei, respectiv b si c localizeaza “umerii” curbei • functia trapezoidala, notata trapmf, avand expresia matematica:
−−
−−
=
≤
≤≤
≤≤
≤≤
≤
= 0,,1,minmax
xd daca ,0
c daca ,c-d
x-d
cxb ,1
bxa daca ,a-b
a-x
a xdaca ,0
),,,,(cd
xd
ab
ax
dx
dacdcbaxf ,
in care parametrii a si d care localizeaza “picioarele” curbei, respectiv b si c localizeaza “umerii” curbei • functia triunghiulara, notata trimf, avand expresia matematica:
−−
−−
=
≤
≤≤
≤≤
≤
= 0,,minmax
xc daca ,0
b daca ,b-c
x-c
bxa daca ,a-b
a-x
a xdaca ,0
),,,,(bc
xc
ab
ax
cx
dcbaxf ,
in care parametrii a si c care localizeaza “picioarele” curbei, iar b localizeaza “varful” curbei Evident, fiind monoton crescatoare, respectiv monoton descrescatoare, functiile sigmoidala si curba z nu ar putea fi folosite decat cel mult la marginile din dreapta, respectiv din stanga ale universului discursului, dar ele nu au fost utilizate in simulari deoarece nu s-au incercat combinatii de forme diferite de MFs in cadrul aceluiasi univers al discursului, pentru nici o marime. Rezultatele simularilor, care au folosit mai multe metode de realizare a operatorilor AND, OR, implicatie, agregare si defuzzificare, s-au dovedit a fi cele mai bune in cazul proiectarii RF prin functii triunghiulare. Ele sunt in concordanta cu indicatiilor teoretice, bazate pe literatura de specialitate in domeniul controlului fuzzy, care recomanda functiile triunghiulare deoarece prin utilizarea lor se reduce complexitatea calculului, fac posibila o usoara implementare a algoritmului fuzzy pe microcontrollere de 8 biti (de exemplu, microcontrollerul firmei Philips Semiconductor tip 87C752, care e o varianta mai ieftina a arhitecturii 80C51), deci se pot utiliza in aplicatiile care se desfasoara in timp real folosind tehnologia existenta in prezent. Aceste rezultate sunt prezentate la sfarsitul acestui capitol, pentru toate cele 3 configuratii de convertoare.
2) Alegerea numarului de functii de apartenenta Conform teoriei, alegerea numarului de functii de apartenenta este optiunea proiectantului, cu amendamentul ca un numar mare functii de apartenenta permite obtinerea unei bune precizii de reglare, dar in acelasi timp creste nejustificat numarul de reguli din baza de reguli fuzzy care inseamna o tabela mai mare in memoria calculatorului, deci un spatiu mai mare de memorie alocat. Practic, trebuie acceptat un compromis, anume se adopta un numar de MFs cuprins de regula intre 5 si 9. Dupa unii autori, un numar mai mic ar scade precizia de reglare, iar un numar mai mare nu ar fi justificat in cresterea preciziei. Alti autori recomanda o gama mai larga a numarului de functii de apartenenta, cuprins intre 3 si 11, fapt verificat ca veridic in simularile de liniarizare a familiei de caracteristici externe.
Raport de Cercetare 2011 - 54
in simularile efectuate pentru mai multe curbe unice, s-a probat efectul de liniarizare a caracteristicilor externe pentru 5, 7 si 9 functii de apartenenta: A. Alegerea formelor de MFs simetrice si echidistante
S-a pornit initial de la functii de apartenenta simetrice si echidistante, care se suprapun in proportie de 50%, in concordanta cu teoria. Avantajele acestei alegeri sunt: • reducerea tabelului stocat in memorie, prin stocarea doar a jumatatii crescatoare din
MFs, jumatatea descrescatoare fiind calculata prin complement fata aceasta. • sunt active la un moment dat doar 4 reguli din intreaga baza de reguli, motiv pentru care
ele sunt preferate, de regula, in proiectarile de controllere fuzzy cu functionare in timp real (on – line) care se bazeaza pe acordarea controllerelui prin modificarea bazei de
reguli (vezi ca exemplu capitolul anterior), cu model de inferenta Mamdani. De asemenea, sunt preferate sistemelor expert (care proceseaza simbolic cunostiinte structurate definite printr-un numar mare de reguli) si retelelor neurale (care proceseaza numeric un volum mare de cunostiinte nestructurate si depind puternic de tehnicile de invatare on-line).
• calculele geometrice simple permit functionarea RF in timp real cu tehnologia actuala,ca de altfel si formele trapezoidale, dar sunt mai bune decat acestea.
Acestea sunt principalele motive care au facut ca formele triunghiulare sa fie utilizate aproape in exclusivitate in proiectarea si implementarea hard si/sau soft a RF. Rezultatele simularilor au aratat ca curbele liniarizate N ± prag se inscriu intr-un prag maxim de pana la 3%, mai putin zona de valori mici a curentului normat n2I , care nu poate
fi reglata. Pe curbele N liniarizate s-a notat tot prin n2I cea mai mica valoare a curentului incepand de la care N se inscrie intr-un prag impus. in aceasta idee, de fiecare data s-a modificat pragul lui N, pentru a putea urmari usor performantele de liniarizare. Evident, liniarizarea este cu atat mai buna cu cat aceasta zona este mai restransa, o solutie fiind marirea numarului de functii de apartenenta, dupa cum se vede in grafice. De exemplu, pentru convertorul Buck, curba D=0,5 care are specific cea mai mare zona de conductie discontinua a curentului prin sarcina din toata familia de curbe, se pot citi pe grafice valorile parametrului de performanta n2I :
• pentru 5 functii de apartenenta simetrice si echidistante: n2I =0,24;
• pentru 7 functii de apartenenta simetrice si echidistante: n2I =0,15;
• pentru 9 functii de apartenenta simetrice si echidistante: n2I =0,11, fapt ce demonstreaza ca marind numarul de functii de apartenenta (MFs) zona nereglata se scade. Se impune ca solutie cresterea acestui numar, dar pe langa dezavantajul sus mentionat de ocupare a memoriei calculatorului/microcontrollerelui, controllerul fuzzy astfel construit tinde sa se transforme intr-unul determinist. B. Alegerea formelor de MFs simetrice si neechidistante
O alta solutie oferita de teoria controllerelor fuzzy este ca, pe baza rezultatelor obtinute, sa se optimizeze controllerul obtinut trecand ulterior la forme ale MFs simetrice si neechidistante, apoi nesimetrice si neechidistante. Pe baza observatiei ca zona cea mai dezavantajata a reglajului este zona de curenti mici, s-a suplimentat varianta simetrica si echidistanta cu NumMFs=7 cu inca 2 MFs pentru descrierea mai precisa a zonei nereglata. Ca exemplu, pentru D=0,1 (care are parametrul n2I =0,36), simularile arata ca universul
discursului [ ]36,0 ,0I n2 ∈ a fost impartit in doua: zona [ ]18,0 ,0I n2 ∈ , pentru descrierea
caruia se folosesc 4 MFs si zona [ ]0,36 ,18,0I n2 ∈ pentru descrierea caruia se folosesc 3 MFs. Rezultatele liniarizarilor sunt la fel sau mai bune pentru MFs=7 neechidistant decat pentru MFs=9 echidistant. C. Alegerea formelor de MFs nesimetrice si neechidistante

Raport de Cercetare 2011 - 55
Cu siguranta cea mai buna solutie, infinitatea posibilitatilor de “inclinare” a MFs face imposibila gasirea heuristica de catre proiectantul uman a optimului global al problemei liniarizarii. Din acest motiv, se pot utiliza algoritmi de cautare a optimului, cum ar fi cei oferiti de strategiile de evolutie sau retelele neuro-fuzzy, care vor fi descrise ulterior. Evident, se pot utiliza si alti algoritmi din domeniul dinamic al soft computing-ului.
3) Calculul gradelor de apartenenta Etapele anterioare fiind parcurse, se pot reprezenta grafic partitiile fuzzy si, pentru orice valori deterministe ale marimilor de intrare se pot calcula respectivele grade de apartenenta folosind expresia functiei de apartenenta de tip triunghi de parametri stabiliti prin partitia fuzzy . Aceasta operatie incheie faza de proiectare a blocului de codificare fuzzy. 5.1.2 Faza de proiectare a blocului de rationamente fuzzy in cadrul acestei faze, proiectantul utilizeaza cunostiintele sale privind reglarea, care sunt cuprinse in baza de date si creaza baza de reguli a controllerelui. in cazul nostru, baza de date o constituie perechile de date ( )doritn2 D ,I ∆ , pentru o curba D=constant din cadrul
familiei infinite de curbe de liniarizare a caracteristicilor externe ale variatoarelor Buck, Boost si Buck-Boost, avand D ca parametru. De regula, baza de reguli este stabilita heuristic, prin incercari succesive. Pentru proiectarea RF de liniarizare a variatoarelor de c.c., se propune o metoda sistematica noua, care utilizeaza modelul de inferenta Sugeno de ordinul zero. Ideea de baza consta in alegerea acelor perechi din baza de date care sa corespunda maximului functiilor de apartenenta, indiferent de alegerea sau nu a unei distributii simetrice si echidistante a MFs in universul discursului. Gradul de apartenenta al intrarilor corespunzatoare maximului fiind astfel 1, alternativa modificarii ulterioare a bazei de reguli dispare. RF astfel proiectat este optim pentru numarul ales de MFs, in concordanta cu performantele eroare de liniarizare - grad de ocupare a memoriei impuse. Desi la sfarsitul capitolului sunt prezentate rezultatele pentru numere si distributii diferite de MFs in universul discursului, pentru simplitate baza de reguli este scrisa doar pentru NumMFs = 5. Numarul din paranteza indica importanta (ponderea) acordata regulii i, care poate fi aleasa oricat in domeniul continuu [ ]1 ,0 , in caz ca se doreste accentuare/diminuarea importantei unor reguli. Ea nu trebuie confundata cu ponderea regulii i, notata
[ ]1 ,0w i ∈ ,care reprezinta produsul gradelor de apartenenta ale marimilor de intrare care alcatuiesc premiza regulii i. in cazul RF proiectat, nu s-a tinut cont de aceasta optiune, toate ponderile fiind egale si de importanta maxima 1. S-a optat pentru o descriere simbolica a bazei de reguli, asa cum este ea furnizata de Fuzzy Toolbox din MatLab. Se poate opta si pentru o descriere lingvistica, iar manual se pot completa tabelele de descriere cu matrice de inferenta sau descriere cu tabel de inferenta
enumerativ, toate cele 4 variante de descriere fiind perfect echivalente. Modelul Sugeno de ordinul zero solicita scrierea consecintelor tuturor regulilor sub forma de constante, acestea fiind reprezentate grafic ca singleton-uri. Acest model de inferenta permite calculul mai rapid a valorilor deterministe ale marimii de iesire pentru un set determinist de marimi de intrare, dar este limitativ din punct de vedere al posibilitatilor de alegere ale operatorilor fuzzy neponderati, implicatiei ce leaga premiza de consecinta in cadrul fiecarei reguli si agregarii intre reguli. Ca exemplu, pentru curba D=0,1 proiectarea s-a facut grafic (exista si varianta prin programare MatLab), iar informatia structurata in matricea FIS este: 1. Name curbaD05 2. Type sugeno 3. Inputs/Outputs i1 1s 4. NumInputMFs 5 5. NumOutputMFs 5 6. NumRules 5
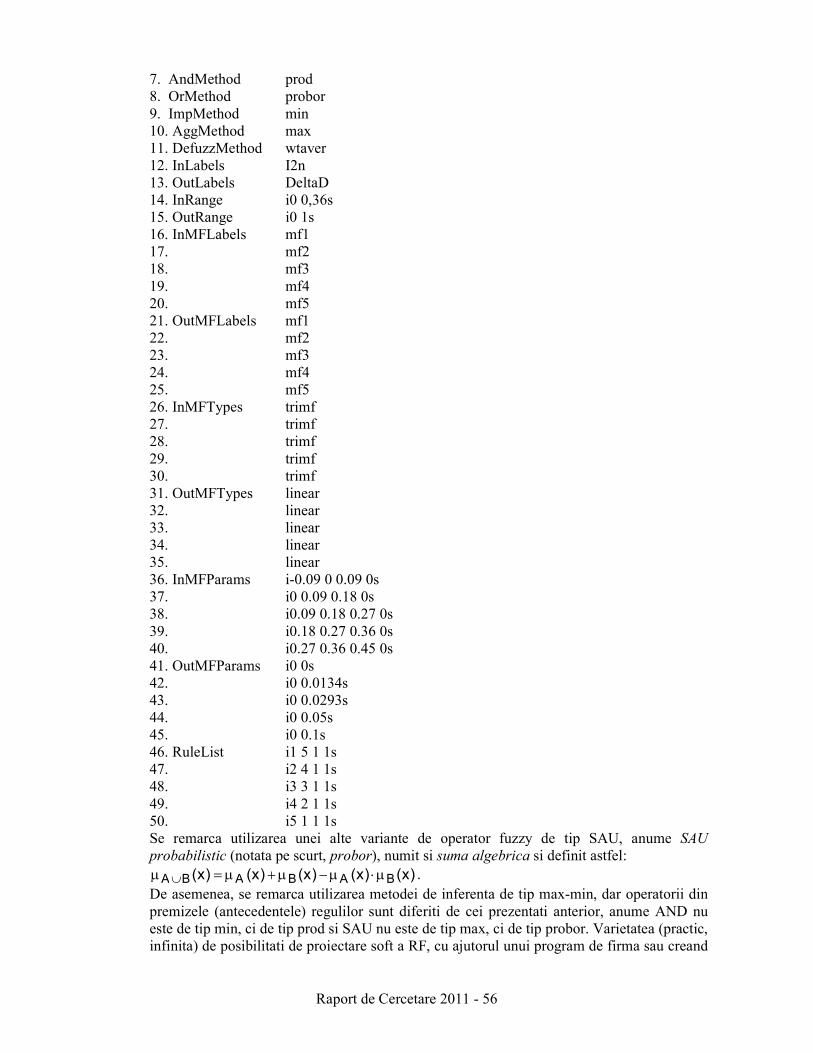
Raport de Cercetare 2011 - 56
7. AndMethod prod 8. OrMethod probor 9. ImpMethod min 10. AggMethod max 11. DefuzzMethod wtaver 12. InLabels I2n 13. OutLabels DeltaD 14. InRange i0 0,36s 15. OutRange i0 1s 16. InMFLabels mf1 17. mf2 18. mf3 19. mf4 20. mf5 21. OutMFLabels mf1 22. mf2 23. mf3 24. mf4 25. mf5 26. InMFTypes trimf 27. trimf 28. trimf 29. trimf 30. trimf 31. OutMFTypes linear 32. linear 33. linear 34. linear 35. linear 36. InMFParams i-0.09 0 0.09 0s 37. i0 0.09 0.18 0s 38. i0.09 0.18 0.27 0s 39. i0.18 0.27 0.36 0s 40. i0.27 0.36 0.45 0s 41. OutMFParams i0 0s 42. i0 0.0134s 43. i0 0.0293s 44. i0 0.05s 45. i0 0.1s 46. RuleList i1 5 1 1s 47. i2 4 1 1s 48. i3 3 1 1s 49. i4 2 1 1s 50. i5 1 1 1s Se remarca utilizarea unei alte variante de operator fuzzy de tip SAU, anume SAU
probabilistic (notata pe scurt, probor), numit si suma algebrica si definit astfel: )x()x()x()x()x( BABABA µ⋅µ−µ+µ=µ ∪ .
De asemenea, se remarca utilizarea metodei de inferenta de tip max-min, dar operatorii din premizele (antecedentele) regulilor sunt diferiti de cei prezentati anterior, anume AND nu este de tip min, ci de tip prod si SAU nu este de tip max, ci de tip probor. Varietatea (practic, infinita) de posibilitati de proiectare soft a RF, cu ajutorul unui program de firma sau creand

Raport de Cercetare 2011 - 57
propriul program, justifica dezavantajul deja enuntat al proiectarii controllerelor prin LF, anume aplicata nesistematic ea poate conduce la rezultate aleatoare ca performanta. 5.1.3. Faza de proiectare a blocului de decodificare fuzzy Metodele de defuzzificare propuse in cadrul teoriei privind realizarea de RF nu se pot aplica in acest caz deoarece ele sunt valabile doar pentru modelul de inferenta Mamdani, care considera codifica fuzzy marimile de iesire prin functii de apartenenta. in schimb, fiind echivalent functional cu o RN de tip functie baza radiala, modelul Sugeno de ordinul zero ales permite aplicarea metodei de defuzzificare suma ponderata (weighted average, notata pe scurt wtaver) prezentata pe larg in cadrul teoriei controllerelor neuro-fuzzy. Astfel, la sfarsitul fazei de proiectare a blocului de defuzzificare rezulta iesirea determinista:
iesirea determinista=
∑
∑
=
=n
1ii
n
1iii
w
fw
.
5.1.4. Rezultate obtinute in vederea aprecierii cantitative a performantelor RF, se face o analogie cu raspunsul indicial
cunoscut din teoria SRA liniare si continue. Prin raspuns indicial a unui SRA se intelege iesirea din SRA daca intrarea este un semnal treapta unitara. El poate avea diferite forme, in functie de structura si parametrii sistemului, o forma posibila fiind cea din fig.36. Reamintim ca aprecierea calitatii unui SRA se face prin urmatorii parametri ce exprima performantele tranzitorii si stationare ale raspunsului indicial:
a. σ - suprareglajul, care reprezinta depasirea maxima de catre marimea de iesire a marimii de regim stationar, exprimata in valoare absoluta si numita abatere maxima:
stmax yy −=σ ,
sau o valoare procentuala a ei
[ ]% 100y
yy
st
stmax ⋅−
=σ .
O valoare prea mare a suprareglajului poate determina o inrautatire a calitatii raspunsului tranzitoriu si o deteriorare a procesului tehnologic.
b. tt - durata regimului tranzitoriu (numita si timp de raspuns), care reprezinta intervalul
de timp dintre inceputul procesului tranzitoriu si momentul in care valoarea absoluta a diferentei styy − scade sub o anumita limita fixata fara a mai depasi ulterior aceasta
limita. Prin conventie, se considera ca regimul tranzitoriu se termina, restabilindu-se un nou regim stationar, atunci cand:
stst yyy ∆≤− ,
in care sty∆ reprezinta un prag limita fixat procentual (de regula, ±5 % sau ± 2 %).
c. ct - timpul de crestere, care reprezinta intervalul de timp in care marimea de iesire
evolueaza intre sty05,0 si sty95,0 .
d. it - timpul de intarziere, care reprezinta timpul necesar ca marimea de iesire sa evolueze
intre valoare zero si sty5,0 .
e. stε - eroarea in regim stationar a SRA, definita prin diferenta dintre marimea de referinta
(programul prescris sistemului) si marimea de iesire in regim stationar:
stst yr −=ε .
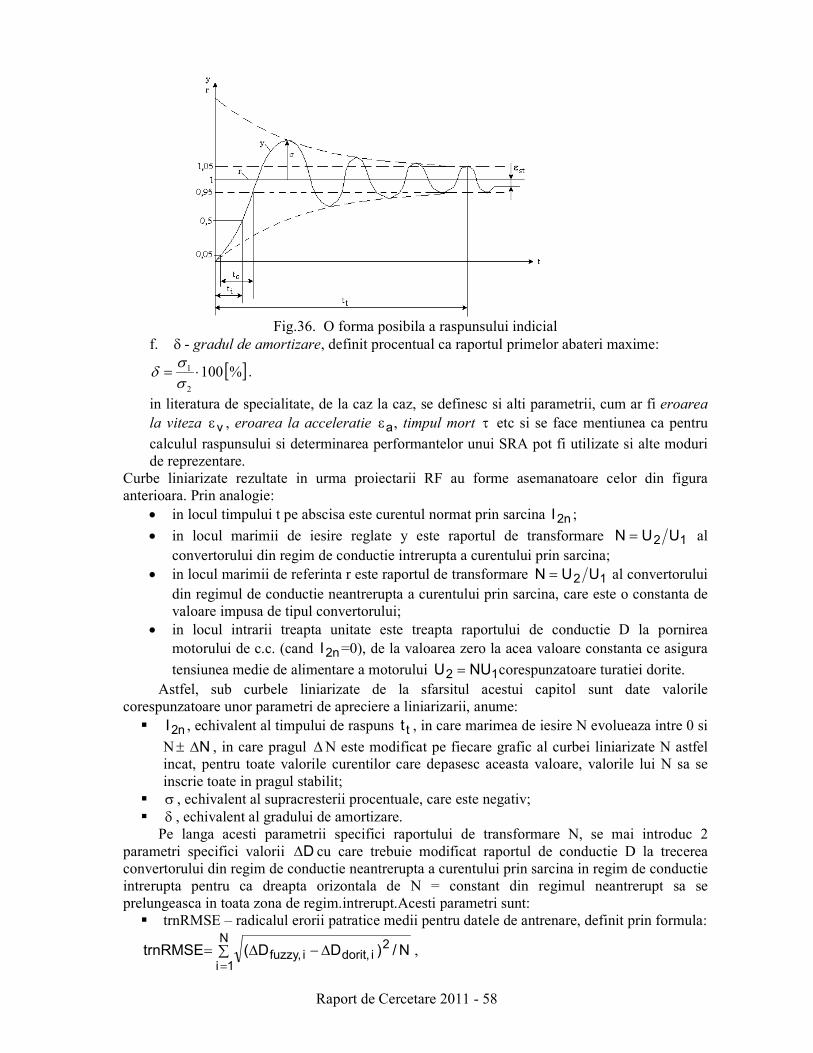
Raport de Cercetare 2011 - 58
Fig.36. O forma posibila a raspunsului indicial f. δ - gradul de amortizare, definit procentual ca raportul primelor abateri maxime:
[ ]% 1002
1 ⋅=σσ
δ .
in literatura de specialitate, de la caz la caz, se definesc si alti parametrii, cum ar fi eroarea
la viteza vε , eroarea la acceleratie aε , timpul mort τ etc si se face mentiunea ca pentru
calculul raspunsului si determinarea performantelor unui SRA pot fi utilizate si alte moduri de reprezentare.
Curbe liniarizate rezultate in urma proiectarii RF au forme asemanatoare celor din figura anterioara. Prin analogie:
• in locul timpului t pe abscisa este curentul normat prin sarcina n2I ;
• in locul marimii de iesire reglate y este raportul de transformare 12 UUN = al convertorului din regim de conductie intrerupta a curentului prin sarcina;
• in locul marimii de referinta r este raportul de transformare 12 UUN = al convertorului din regimul de conductie neantrerupta a curentului prin sarcina, care este o constanta de valoare impusa de tipul convertorului;
• in locul intrarii treapta unitate este treapta raportului de conductie D la pornirea motorului de c.c. (cand n2I =0), de la valoarea zero la acea valoare constanta ce asigura
tensiunea medie de alimentare a motorului 12 NUU = corespunzatoare turatiei dorite. Astfel, sub curbele liniarizate de la sfarsitul acestui capitol sunt date valorile
corespunzatoare unor parametri de apreciere a liniarizarii, anume: n2I , echivalent al timpului de raspuns tt , in care marimea de iesire N evolueaza intre 0 si
N± N∆ , in care pragul ∆N este modificat pe fiecare grafic al curbei liniarizate N astfel incat, pentru toate valorile curentilor care depasesc aceasta valoare, valorile lui N sa se inscrie toate in pragul stabilit;
σ , echivalent al supracresterii procentuale, care este negativ; δ , echivalent al gradului de amortizare.
Pe langa acesti parametrii specifici raportului de transformare N, se mai introduc 2 parametri specifici valorii D∆ cu care trebuie modificat raportul de conductie D la trecerea convertorului din regim de conductie neantrerupta a curentului prin sarcina in regim de conductie intrerupta pentru ca dreapta orizontala de N = constant din regimul neantrerupt sa se prelungeasca in toata zona de regim.intrerupt.Acesti parametri sunt:
trnRMSE – radicalul erorii patratice medii pentru datele de antrenare, definit prin formula:
∑ ∆−∆==
N
1i
2i ,doriti ,fuzzy N/)DD(trnRMSE ,
Raport de Cercetare 2011 - 59
in care i ,fuzzyD∆ este iesirea ∆D oferita de RF atunci cand la intrarea sa se aplica marimea de
intrare i ,n2I a perechii de antrenare numarul i din cele N perechi care alcatuiesc setul de
antrenare, preluat prin program din baza de date oferita de matricea *.fis asociata RF. err_max – valoarea maxima a modulului erorii pentru datele de antrenare, definit prin
formula:
err_max =
( )i ,doriti ,fuzzyN,...2,1i
DDmax ∆−∆∈
.
Toti acesti parametri sunt trecuti sub forma de tabel sub fiecare curba liniarizata. Rezultatele simularilor arata ca cele mai bune valori sunt obtinute in varianta mf7 neechidistant. Ca exemplu, vom aprecia cantitativ rezultatele obtinute in cazul convertorului Boost, curba D=0,3: trnRMSE 0,012 0,0081 0,0056 0.0061 err_max 0,0366 0,0299 0,0236 0,0259
n2I 0,202 0,1347 0,101 0.101
δ 16,09524 16,12245 16,2245 16,09139 Eroarea maxima cea mica este obtinuta in cazul mf7 neechidistant. n2I este minim in cazurile mf7 neechidistant si mf9 echidistant, dar trnRMSE este mai bun pentru mf7 neechidistant. Ca dezavantaj, se poate observa ca δ creste cu cresterea numarului de MFs, adica liniarizarea este mai “ondulata”, dar tot se inscrie in pragul N∆ impus. Din punct de vedere practic, acest lucru inseamna ingreunarea putin a rolului regulatorului de turatie (RT), care va trebui sa compenseze o valoare N∆ mai mare. in concluzie, RF de liniarizare, privit ca preregulator de turatie este mai bun ca parametri cu cat numarul de MFs creste, mai putin parametrul δ .
5.2. PROIECTAREA RF PENTRU INTREAGA FAMILIE DE CARACTERISTICI EXTERNE
5.2.1. Strategia de proiectare Strategia de proiectare a RF pentru o unica curba ramane valabil si pentru proiectarea RF pentru intreaga familie de caracteristici externe, cu urmatoarele modificari:
1. RF are acum doua marimi de intrare: D si n2I si aceeasi marime de iesire: D∆ ; 2. Numarul de functii de apartenenta ale intrarilor este 5, deci sunt in total 25 de reguli,
deci spatiul de intrare este partitionat grila in 25 de regiuni fuzzy; 3. La sfarsitul capitolului sunt prezentate cate un exemplu concret de realizare a etapei de
defuzzificare si suprafata de control, prin care se reprezinta grafic functia ( )2nI ,DDD ∆=∆ , aceeasi pentru toate convertoarele.
5.2.2. Rezultate obtinute Sunt prezentate curbele N liniarizate care arata capacitatea FIS creat de a realiza 2 tipuri de interpolare fuzzy:
in cadrul unei singure curbe de parametru D=constant, care coincide cu cea corespunzatoare din cazul proiectarii RF pentru o singura curba, reprezentata in baza de reguli printr-un rand;
intre curbe, care arata capacitatea de interpolare pentru valori ale parametrului D aflate intre valorile specifice a doua randuri succesive din baza de reguli.
Rezultatele arata ca RF creat acopera intreg spatiul continuu de intrare ( )n2I,D , unde [ )1,0D∈ si
[ ]1,0I n2 ∈ se incadreaza pentru ambele tipuri sub pragul de 5 % pentru convertorul Buck, sub 7% pentru convertorul Boost si sub 12% pentru convertorul Buck-Boost. Datorita formelor de unda ale curbei N liniarizate mai departate de cea standard de definire a raspunsului indicial pentru SRA continue si liniare, performantele au fost stabilite doar prin
Raport de Cercetare 2011 - 60
parametrul n2I indicat pe fiecare curba. De exemplu, cea mai buna valoare este n2I =0,1919 obtinuta pentru D=0,6 si D=0,7, ambele obtinute prin interpolare intre curbele de liniarizare a convertorului Buck. Mentionam ca rezultate superioare se obtin prin marirea numarului de functii de apartenenta ale marimilor de intrare, asa cum a reiesit din rezultatele experimentale in cadrul proiectarii RF pentru o singura curba, dar partitia spatiului de intrare isi va mari dimensiunea de la
n2ID nn × la
( ) ( )entarIIentarDD nnnnnn limsup,limsup, 22
+×+ , unde prin n am desemnat numarul de functii de
apartenenta al marimii de intrare data ca indice. Dupa cum am mai precizat, acest fapt are ca dezavantaj cresterea memoriei unitatii de calcul si a complexitatii calculului, ultima putand conduce la dificultati de functionare in timp real a RF. 5.3. Compararea RF proiectat cu model Sugeno cu RF proiectat cu model Mamdani
Conform teoriei, modelul de inferenta Sugeno prezinta avantaje nete fata de cel traditional Mamdani, fiind mai compact, mai rapid si adaptiv. Astfel, FIS realizat cu modelul Mamdani are un grad mare de robustete, fiind inadaptabil la modificarea parametrilor FIS. in cadrul lui, s-a modificat doar baza de reguli fuzzy. FIS realizat cu modelul Sugeno este adaptiv, in sensul ca se pot modifica parametrii functiilor ce descriu matematic functiile de apartenenta fuzzy, ponderile regulilor, baza de reguli etc, devenind astfel deschis eventualilor algoritmi de invatare incorporati. Acestea sunt principalele motive care au facut ca in ultima decada modelul Mamdani sa fie inlocuit tot mai des cu modelul Sugeno.
in cazul proiectarii RF de liniarizare pentru comanda motoarelor de c.c. cu variatoare de c.c., au rezultat urmatoarele avantaje: a) metoda de proiectare propusa in acest capitol este sistematica si conduce la rezultate
concrete, spre deosebire de cea nesistematica prezentata in capitolul anterior ale carei rezultate sunt aleatoare;
b) pragul limita fixat procentual al curbei N liniarizate este mult mai mic: • maxim 3 % pentru proiectarea RF pentru o curba, pentru toate tipurile de convertoare; • maxim 5 % pentru proiectarea RF pentru intreaga familie de curbe in a variatorului Buck; • maxim 7 % pentru proiectarea RF pentru intreaga familie de curbe in a variatorului Boost; • maxim 12 % pentru proiectarea RF pentru intreaga familie de curbe in a variatorului Buck –
Boost, spre deosebire de proiectarea cu RF model Mamdani care putea depasi 30 %. c) gama de variatie a marimilor de intrare este cea maxima posibila, anume D [ )1 ,0∈ si
( ]1 ,0I n2 ∈ , spre deosebire de RF model Mamdani care putea fi proiectat pe o gama mai restransa, in functie de cunostiintele si experienta proiectantului;
d) numarul de reguli este mai mic (maxim 25), iar performantele sunt mai bune, deci avantajul ocuparii unui spatiu de memorie mai mic pentru implementare;
e) metoda de defuzzificare aleasa (media ponderata) permite cresterea vitezei de prelucrare a unitatii de calcul, deci RF poate raspunde mai rapid la functionarea in timp real;
f) RF model Sugeno permite imbunatatirea proiectarii prin algoritmi de optimizare specifici altor subdomenii ale inteligentei artificiale, cum ar fi calculul evolutiv din care s-au ales strategiile de evolutie.
5.4. Optimizarea proiectarii RF prin utilizarea SE
Dupa cum s-a aratat in cele de mai sus, una dintre solutiile de optimizare a proiectarii RF este cresterea numarului de functii de apartenenta. Dezavantajele acestei metode sunt cresterea memoriei ocupate de tabelul bazei de reguli in memoria unitatii de calcul si pericolul transformarii RF intr-unul determinist.
Din rezultatele simularilor efectuate, se demonstreaza ca o alta solutie viabila este utilizarea strategiilor de evolutie prin care se mentin baza de reguli si numarul de functii de apartenenta, dar are loc modificarea parametrilor ce definesc forma acestora in vederea satisfacerii criteriului
Raport de Cercetare 2011 - 61
de optimizare propus. Mai concret pentru aplicatiile studiate, ideea de baza consta in modificarea parametrilor a, b si c care definesc pozitia (varful si bazele) functiilor de apartenenta triunghiulare in vederea optimizarii parametrilor de performanta alesi (trnRMSE si err_max) pana sub pragul inferior impus prin proiectare.
S-a utilizat o rutina de optimizare bazata pe strategii de evolutie, care are urmatoarele caracteristici: • o populatie care contine un singur individ; • un cromozom cu 35 de parametri (cate 3 parametri pentru fiecare din cele 5 functii de
apartenenta triunghiulare ale celor doua marimi de intrare (D si n2I ) si 5 parametri ce definesc singleton-urile marimii de iesire, D∆ );
• o probabilitatea de mutatie de 5 %; • o variatie de 5 % a mutatiei in jurul actualelor valori ale marimilor D si D∆ . Valorile de mai sus au fost alese folosind o distributie uniforma
Noua partitie a spatiilor de intrare si rezultatele simularilor sunt prezentate la sfarsitul acestui capitol, dupa 58000 de variatii ale mutatiei. S-a ales aceasta valoare deoarece s-a constat ca un numar sporit de variatii nu aduce imbunatatiri semnificative parametrilor de performanta, iar timpul necesar de procesare creste foarte mult.
Prin compararea curbelor N liniarizate pentru familiile de caracteristici externe ale convertoarelor Buck, Boost si Buck – Boost obtinute prin proiectarea RL cu cele doua metode de proiectare (LF si LF+SE), se pot trage urmatoarele concluzii generale: a) strategiile de evolutie actioneaza asupra zonei din jurul originii, care prezinta cea mai
puternica neliniaritate, anume saltul D∆ in origine este micsorat cu pretul cresterii pragului
limita fixat N∆ . Rezultatele simularilor prezinta atat pragurile vechi obtinute prin proiectarea prin LF (5% pentru convertorul Buck, 7% pentru convertorul Boost si 12% pentru convertorul Buck-Boost), cat si noile praguri obtinute prin proiectarea prin LF+SE, care sunt individualizate pentru fiecare curba;
b) se constata ca noile praguri sunt in toate situatiile mai mari cu 1% pana la 10% (variatia este aleatoare, conform rutinei de optimizare propuse), dar parametrul de performanta n2I este in toate situatiile mai bun de 1 pana la 6 ori, mai ales in cazul convertorului Buck. Ca exemplu numeric, sa consideram cazul D=0.25 pentru convertorul Boost: • proiectare prin LF: n2I = 0,2323, prag 5%;
• proiectare prin LF+SE: n2I = 0,0615 pentru prag 5% si n2I =0,05 pentru prag 7%, deci o imbunatatire de 3,78 ori prin compararea cu acelasi prag si o imbunatatire de 4,65 ori prin compararea cu pragul de 7% ales deoarece intreaga curba liniarizata N intra in acest prag, mai putin zona din vecinatatea originii.
6. PROIECTAREA REGULATORULUI NEURO-FUZZY (RNF). COMPARAREA PERFORMANTELOR RNF CU CELE ALE RF NEANTRENAT SI ANTRENAT DE ANFIS. OPTIMIZAREA PROIECTARII RNF PRIN UTILIZAREA SE.
Analog cu proiectarea RF, proiectarea RNF s-a facut in doua variante: D. pentru una sau mai multe curbe din familia de caracteristici externe ale variatorului de
c.c., in ideea reglarii in trepte (una sau cateva valori fixe) ale turatiei motorului de c.c. E. pentru intreaga familie de caracteristici externe, pentru reglarea continua a turatiei
motorului de c.c. in intreaga gama posibila. in continuare, descriem proiectarea RNF in cele doua variante. 6.1. PROIECTAREA RNF PENTRU O UNICA CURBA 6.1.1. Descrierea programului de liniarizare RF create cu forme de MFs compuse din segmente de drepte, de regula triunghiulare,
eventual trapezoidale– ca multimi fuzzy - si in unele cazuri chiar dreptunghiulare – ca multimi

Raport de Cercetare 2011 - 62
deterministe - au avantajul utilizarii pe scara larga in SRA in timp real, dar s-a constatat ca nefiind flexibile in punctele de racordare intre segmente strica precizia de reglare. De aceea, in ultima vreme, proiectarea RNF utilizeaza forme de MFs neliniare, continue si derivabile in orice punct, care sunt utilizate des in domeniile probabilitatii si statisticii, anume in special functiile Gauss si clopot generalizat:
• ( )
σ
−−=σ
2
2
2
cxexp)c,,x(gaussian ;
• b2
a
cx1
1)c,b,a,x(gbell
−+
= .
Deoarece forma de MFs clopot generalizat are cu un parametru in plus, in care parametrii a,b si c se pot varia pentru a controla centrul, panta si latimea MFs, ea este mai des folosita decat forma de MFs Gauss in proiectarea RNF. in vederea proiectarii RNF si a compararii performantelor acestuia cu cele ale RF neantrenat (descris in capitolul anterior) si antrenat de ANFIS, s-a creat un program MatLab in care se parcurg urmatoarele etape:
1. Se impart universurile discursurilor marimilor de intrare [ ]1 ,0I n2 ∈ si de iesire
[ ]1 ,0D∈∆ intr-un numar de puncte, de exemplu numPts=151;
2. Se scrie expresia ideala a marimii de iesire ( )2nI ,DDD ∆=∆ ; 3. SE imparte numPts in doua seturi de puncte intrepatrunse: jumatate desemneaza
perechile de antrenare, iar cealalta jumatate perechile de verificare a performantelor ANFIS din punctul de vedere al erorii lui D∆ . Facultativ, se pot trasa grafic aceste puncte;
4. Folosind matricea FIS atasata RF, se traseaza MFs initiale (5 MFs simetrice si echidistante), pentru a avea termen de comparatie in continuare;
5. Se face antrenarea RNA ce implementeaza algoritmul de proiectare a RF. in cadrul acestei etape se utilizeaza algoritmul hibrid de invatare. El cuprinde etapa de back-propagation (pentru stabilirea setului de parametri neliniari 1S din componenta functiilor ce descriu MFs, ca iesiri din stratul 1 al RNA a ANFIS) si etapa de propagare inainte ce foloseste metoda celor mai mici patrate (pentru stabilirea setului de parametri
liniari 2S din componenta functiilor de nod if , ca iesiri din stratul 4 al RNA a ANFIS). Pentru o comparatie ulterioara, de fapt se antreneaza doua FIS: cel creat in capitolul anterior si care corespunde RF si cel creat automat de ANFIS pe baza perechilor de antrenare oferite si care corespunde RNF. Antrenarea automata se face cu 10 epoci implicite, la care utilizatorul poate solicita prin program un numar suplimentar de epoci. Operatorii si operatiile necesare proiectarii automate a RNF sunt realizati astfel: • AND: prod; • OR: max; • Implicatie: prod (nu exista alte optiuni); • Agregare: include toate singleton-urile (nu exista alte optiuni); • Defuzzificare: wtaver. Tabelele de evolutie a parametrilor de performanta ai RNF sunt prezentati la sfarsitul acestui capitol. Ca parametri de performanta se aleg: parametri specifici marimii de iesire D∆ din RNF:
a) trnRMSE – radicalul erorii patratice medii pentru datele de antrenare, definit prin formula:
∑ ∆−∆==
N
1i
2i ,doriti ,fuzzy N/)DD(trnRMSE ,
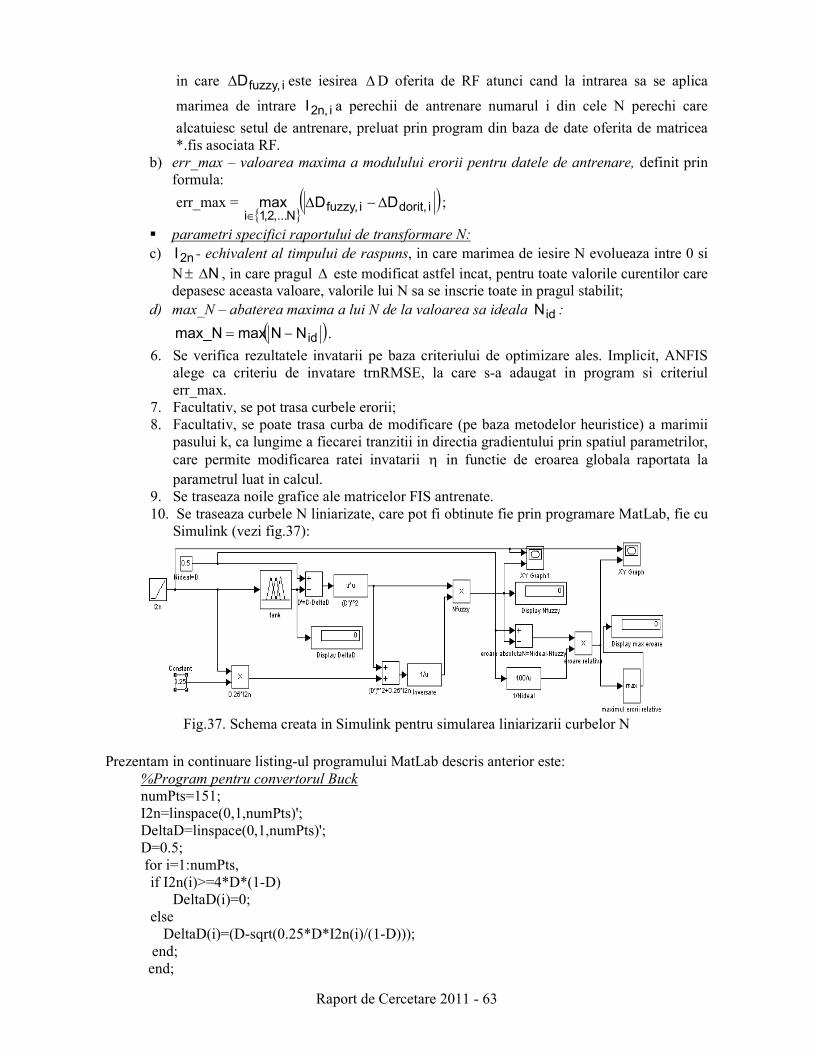
Raport de Cercetare 2011 - 63
in care i ,fuzzyD∆ este iesirea ∆ D oferita de RF atunci cand la intrarea sa se aplica
marimea de intrare i ,n2I a perechii de antrenare numarul i din cele N perechi care
alcatuiesc setul de antrenare, preluat prin program din baza de date oferita de matricea *.fis asociata RF.
b) err_max – valoarea maxima a modulului erorii pentru datele de antrenare, definit prin formula:
err_max =
( )i ,doriti ,fuzzyN,...2,1i
DDmax ∆−∆∈
;
parametri specifici raportului de transformare N:
c) n2I - echivalent al timpului de raspuns, in care marimea de iesire N evolueaza intre 0 si N± N∆ , in care pragul ∆ este modificat astfel incat, pentru toate valorile curentilor care depasesc aceasta valoare, valorile lui N sa se inscrie toate in pragul stabilit;
d) max_N – abaterea maxima a lui N de la valoarea sa ideala idN :
( )idNNmaxNmax_ −= .
6. Se verifica rezultatele invatarii pe baza criteriului de optimizare ales. Implicit, ANFIS alege ca criteriu de invatare trnRMSE, la care s-a adaugat in program si criteriul err_max.
7. Facultativ, se pot trasa curbele erorii; 8. Facultativ, se poate trasa curba de modificare (pe baza metodelor heuristice) a marimii
pasului k, ca lungime a fiecarei tranzitii in directia gradientului prin spatiul parametrilor, care permite modificarea ratei invatarii η in functie de eroarea globala raportata la parametrul luat in calcul.
9. Se traseaza noile grafice ale matricelor FIS antrenate. 10. Se traseaza curbele N liniarizate, care pot fi obtinute fie prin programare MatLab, fie cu
Simulink (vezi fig.37):
Fig.37. Schema creata in Simulink pentru simularea liniarizarii curbelor N
Prezentam in continuare listing-ul programului MatLab descris anterior este:
%Program pentru convertorul Buck
numPts=151; I2n=linspace(0,1,numPts)'; DeltaD=linspace(0,1,numPts)'; D=0.5; for i=1:numPts, if I2n(i)>=4*D*(1-D) DeltaD(i)=0; else DeltaD(i)=(D-sqrt(0.25*D*I2n(i)/(1-D))); end; end;
Raport de Cercetare 2011 - 64
data=iI2n,DeltaDs; trnData=data(1:2:numPts,:); chkData=data(2:2:numPts,:); figure(1); plot(trnData(:,1),trnData(:,2),'o',chkData(:,1),chkData(:,2),'x'); %numMFs=4; %mfType='trimf'; %curbaD05=genfis1(trnData,numMFs,mfType); ix,mfs=plotmf(curbaD05,'input',1); figure(2); plot(x,mf); title('Initial Membership Functions for input I2n') numEpochs=10000; icurbaD051,trnErr,ss,curbaD02,chkErrs=anfis(trnData,curbaD05,numEpochs,... NaN,chkData); numEpochs=10000; curbaD3=anfis(trnData); icurbaD052,trnErr,ss,curbaD21,chkErrs=anfis(trnData,curbaD3,numEpochs,... NaN,chkData); % trnOut=evalfis(trnData(:,1),curbaD051); % trnRMSE=norm(trnOut-trnData(:,2))/sqrt(length(trnOut)); epoch=1:numEpochs; figure(3); plot(epoch,trnErr,'o',epoch,chkErr,'x'); hold on; plot(epoch,itrnErr chkErrs); hold off; figure(4); plot(epoch,ss,'-',epoch,ss,'x'); xlabel('epochs'),ylabel('ss'),title('Step Sizes'); ix, mfs=plotmf(curbaD051,'input',1); figure(5); plot(x,mf); title('Final Membership Functions for input I2n'); writefis(curbaD05, 'curbaD05AdrNeantr'); writefis(curbaD051, 'curbaD05AdrAntr'); writefis(curbaD052, 'curbaD05AnfisAntr'); trnOut2=evalfis(data(:,1),curbaD05); trnRMSEGenFis=norm(trnOut2-data(:,2))/sqrt(length(trnOut2)) max_errGenFis=max(abs(trnOut2-data(:,2))) trnOut0=evalfis(data(:,1),curbaD051); trnRMSEGenFisAntr=norm(trnOut0-data(:,2))/sqrt(length(trnOut0)) max_errGenFisAntr=max(abs(trnOut0-data(:,2))) trnOut1=evalfis(data(:,1),curbaD052); trnRMSEAutoAntr=norm(trnOut1-data(:,2))/sqrt(length(trnOut1)) max_errAutoAntr=max(abs(trnOut1-data(:,2)))
Listing-ul programului MatLab de liniarizare este:
%Program de liniarizare a curbelor N pentru convertorul Buck

Raport de Cercetare 2011 - 65
numPts=500; I2n=linspace(0.00001,1,numPts)'; D=0.5; deltaD=evalfis(I2n,curbaD052); % deltaD=evalfis(I2n,cd); for i=1:numPts, deltaD(i)=deltaD(i); end; DeltaD=linspace(0,0.5,numPts)'; for i=1:numPts, if I2n(i)>=4*D*(1-D) DeltaD(i)=0; else DeltaD(i)=D-sqrt(0.25*D*I2n(i)/(1-D)); end; end; N=linspace(0,0.5,numPts)'; for i=1:numPts, if I2n(i)<4*D*(1-D) ab1=(D-deltaD(i))^2; ab2=ab1+0.25*I2n(i); N(i)=ab1/ab2; else N(i)=D end; end; Nid=linspace(0,0.5,numPts)'; for i=1:numPts, if I2n(i)<4*D*(1-D) Nid(i)=((D-DeltaD(i))^2)/((D-DeltaD(i))^2+0.25*I2n(i)); else Nid(i)=D; end; end; v=0.03; prag1=D*(1+v); prag2=D*(1-v); figure(1); plot(I2n,N); hold on plot(I2n,Nid,':'); hold on plot(I2n,prag1); hold on plot(I2n,prag2); grid on

Raport de Cercetare 2011 - 66
figure(2); plot(I2n,deltaD) plot(I2n,DeltaD,':') for i=1:numPts, deltaN(i)=(N(i)-Nid(i))/Nid(i)*100; end; figure(3); plot(I2n,deltaN); iminD,minIs=min(N); sigma=(D-minD)/D*100; sigma %suprareglaj procentual tr=0; for i=1:numPts, if N(i)>=prag1 tr=i; end; if N(i)<=prag2 tr=i; end; end; timp=I2n(tr); timp %interval I2n dupa care D este mai mic decat v% din D ideal imaxD,maxIs=max(N(minI:numPts)); iminD2,minI2s=min(N(maxI:numPts)); amort=100*(D-minD2)/(D-minD); amort %grad amortizare procentual for i=1:numPts tempN(i)= N(i)-Nid(i); end; temp=abs(tempN(1:numPts)); max_abatere_N = max(temp(1:numPts)); max_abatere_N
6.1.2. Rezultate obtinute
In urma rularii programului descris mai sus, MatLab genereaza RNA pentru matricea FIS creata grafic a RF neantrenat prezentat in capitolul anterior si caracterizata prin:
Numar total de noduri: 24; Numar total de parametri liniari ai multimii 2S : 10, anume
0q ,5,4,3,2,1i ,r,q,p iiii =∈ );
Numar total de parametri neliniari ai multimii 1S : 15, anume parametrii formelor
triunghiulare ale MFs 1,2,3,4,5i ,c,b,a iii ∈ ; Numar total de parametri: 25; Numarul de reguli fuzzy: 5;
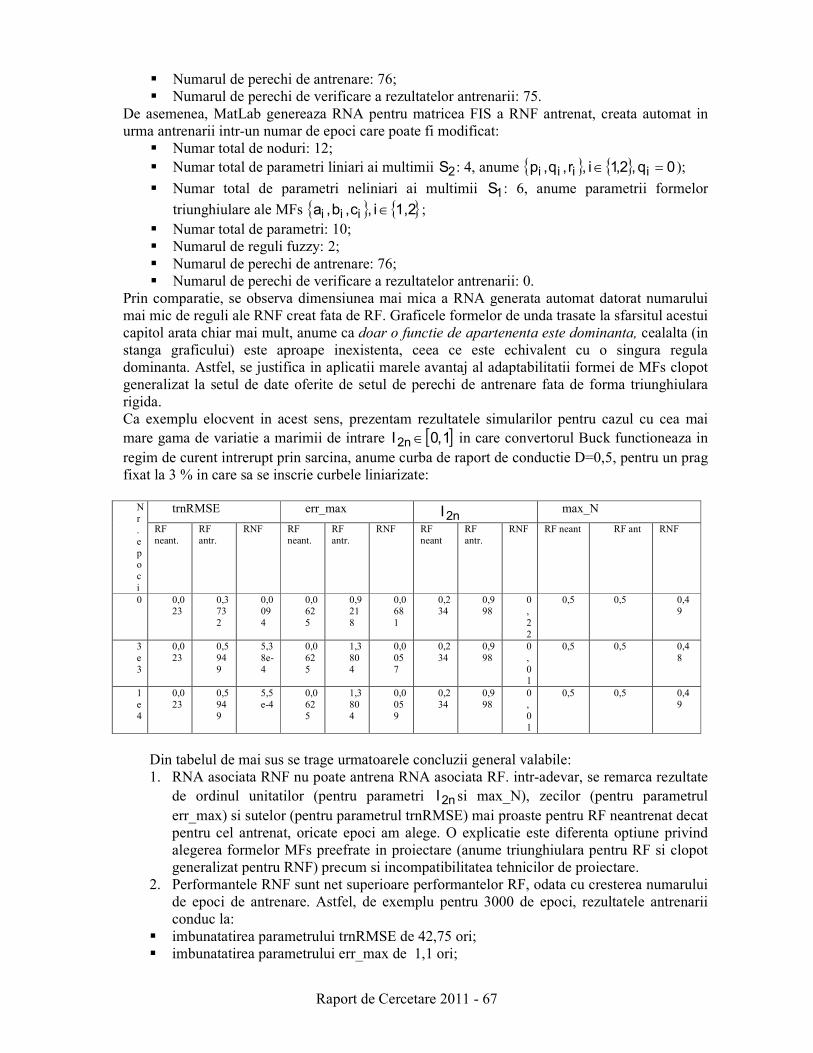
Raport de Cercetare 2011 - 67
Numarul de perechi de antrenare: 76; Numarul de perechi de verificare a rezultatelor antrenarii: 75.
De asemenea, MatLab genereaza RNA pentru matricea FIS a RNF antrenat, creata automat in urma antrenarii intr-un numar de epoci care poate fi modificat:
Numar total de noduri: 12; Numar total de parametri liniari ai multimii 2S : 4, anume 0q ,2,1i ,r,q,p iiii =∈ );
Numar total de parametri neliniari ai multimii 1S : 6, anume parametrii formelor
triunghiulare ale MFs 1,2i ,c,b,a iii ∈ ; Numar total de parametri: 10; Numarul de reguli fuzzy: 2; Numarul de perechi de antrenare: 76; Numarul de perechi de verificare a rezultatelor antrenarii: 0.
Prin comparatie, se observa dimensiunea mai mica a RNA generata automat datorat numarului mai mic de reguli ale RNF creat fata de RF. Graficele formelor de unda trasate la sfarsitul acestui capitol arata chiar mai mult, anume ca doar o functie de apartenenta este dominanta, cealalta (in stanga graficului) este aproape inexistenta, ceea ce este echivalent cu o singura regula dominanta. Astfel, se justifica in aplicatii marele avantaj al adaptabilitatii formei de MFs clopot generalizat la setul de date oferite de setul de perechi de antrenare fata de forma triunghiulara rigida. Ca exemplu elocvent in acest sens, prezentam rezultatele simularilor pentru cazul cu cea mai mare gama de variatie a marimii de intrare [ ]1 ,0I n2 ∈ in care convertorul Buck functioneaza in regim de curent intrerupt prin sarcina, anume curba de raport de conductie D=0,5, pentru un prag fixat la 3 % in care sa se inscrie curbele liniarizate:
Nr. epoci
trnRMSE err_max n2I max_N
RF neant.
RF antr.
RNF RF neant.
RF antr.
RNF RF neant
RF antr.
RNF RF neant RF ant RNF
0
0,023
0,3732
0,0094
0,0625
0,9218
0,0681
0,234
0,998
0,22
0,5 0,5 0,49
3e3
0,023
0,5949
5,38e-4
0,0625
1,3804
0,0057
0,234
0,998
0,01
0,5 0,5 0,48
1e4
0,023
0,5949
5,5e-4
0,0625
1,3804
0,0059
0,234
0,998
0,01
0,5 0,5 0,49
Din tabelul de mai sus se trage urmatoarele concluzii general valabile: 1. RNA asociata RNF nu poate antrena RNA asociata RF. intr-adevar, se remarca rezultate
de ordinul unitatilor (pentru parametri n2I si max_N), zecilor (pentru parametrul err_max) si sutelor (pentru parametrul trnRMSE) mai proaste pentru RF neantrenat decat pentru cel antrenat, oricate epoci am alege. O explicatie este diferenta optiune privind alegerea formelor MFs preefrate in proiectare (anume triunghiulara pentru RF si clopot generalizat pentru RNF) precum si incompatibilitatea tehnicilor de proiectare.
2. Performantele RNF sunt net superioare performantelor RF, odata cu cresterea numarului de epoci de antrenare. Astfel, de exemplu pentru 3000 de epoci, rezultatele antrenarii conduc la:
imbunatatirea parametrului trnRMSE de 42,75 ori; imbunatatirea parametrului err_max de 1,1 ori;

Raport de Cercetare 2011 - 68
imbunatatirea parametrului n2I de 23,4 ori, de la 0,234 la 0,01; imbunatatirea parametrului max_N de 1,2 ori;
Evident, aceste valori sunt relative, ele depinzand de tipul convertorului si de valorile date lui D, numPts, numEpochs, etc, dar imbunatatirea performantelor prin alegerea proiectarii RNF in locul RF ramane o afirmatie general valabila. Cea mai importanta imbunatatire este reducerea drastica a zonei de curenti n2I in care nu se poate face reglajul, zona care aproape dispare. 3. De regula, prin cresterea numarului de epoci de antrenare performantele se imbunatatesc (vezi rezultatele experimentale de la sfarsitul acestui capitol), dar uneori se remarca efectul de supraantrenare a RNA. Este cazul de fata in care, in urma antrenarii cu 10000 de epoci, performantele sunt mai slabe decat in cazul antrenarii cu 3000 de epoci.
6.2. PROIECTAREA RNF PENTRU INTREAGA FAMILIE DE CARACTERISTICI EXTERNE
6.2.1. Strategia de proiectare pentru familia de caracteristici externe Analog cu proiectarea RF, strategia de proiectare a RNF pentru o unica curba ramane valabila si pentru proiectarea RNF pentru intreaga familie de caracteristici externe, cu urmatoarele modificari:
4. RF are acum doua marimi de intrare: D si n2I si aceeasi marime de iesire: D∆ ; 5. Numarul de functii de apartenenta ale intrarilor este 2, deci sunt in total 4 de reguli, deci
spatiul de intrare este partitionat grila in doar 4 regiuni fuzzy, avantaj major fata de RF ce necesita de regula zeci, iar uneori peste 100 de reguli fuzzy. Mai mult, din rezultatele prezentate la sfarsitul capitolelor se poate observa ca marimea de intrare D are una dintre MFs aproape inexistenta.
6. La sfarsitul capitolului sunt prezentate cate un exemplu concret de realizare a etapei de
defuzzificare si suprafata de control, prin care se reprezinta grafic dependenta functionala ( )2nI ,DDD ∆=∆ , aceeasi pentru toate convertoarele. Curbele N liniarizate sunt reprezentate grafic dupa antrenarea cu un numar de epoci care corespunde atingerii unui minim al parametrilor de performanta trnRMSE si err_max.
6.2.2. Rezultate obtinute in continuare se prezinta comparativ performantele de proiectare obtinute cu RF si RNF. Ca
exemplu de proiectare a RNF pentru o curba interpolata din familia de caracteristici externe, vom considera cazul convertorului Buck, pentru D=0,7 care va fi analizat direct pe grafic. Se observa ca RF reuseste sa mentina curba N liniarizata intr-un prag de 5 %, mai putin zona curentilor n2I mici,
unde N iese total din acest prag la valori n2I < 0,2222 atinse pentru 5 MFs echidistante. in schimb, RNF se mentine intr-un prag tot de 5 % (care poate fi mai mare pentru alte curbe si alte convertoare), dar zona de neliniaritate este mai mica de aproximativ 2 ori, anume n2I =0,101. Se observa ca N are o variatie mai mare pentru valori ale curentului care intra in pragul de reglare si N are o variatie mai mica pentru curenti n2I apropiati de zero. Ca urmare, regulatorul de turatie RT are de reglat variatii mai mari de turatie la RNF fata de RF, dar gama de reglare este aproape maximul gamei de valori posibile ale marimii de intrare n2I .
La acelasi tip de concluzii se ajunge si pentru RNF proiectate pentru celelalte topologii de convertoare evident cu deosebirile de valori, anume reglajul se incadreaza sub praguri ∆N mai mari decat la proiectarea cu RF, anume pentru convertorul Buck sub 15 %, pentru convertorul Boost sub 8 % si pentru convertorul Buck-Boost sub 10%.
Raport de Cercetare 2011 - 69
6.3. OPTIMIZAREA PROIECTARII RNF PRIN UTILIZAREA SE Din cele de mai sus reiese ca una dintre solutiile de proiectare este cresterea numarului de
perechi de antrenare a RNA ce reprezinta ANFIS. Dezavantajele acestei metode constau in posibilitatea aparitiei fenomenului de suprainvatare a RNA (care va strica parametrii de performanta incepand de la o anumita epoca), precum si cresterea exagerata a timpului de prelucrare a unitatii de calcul.
Prin rezultatele simularilor efectuate se arata ca solutia de optimizare a proiectarii RNF prin strategii de evolutie este o solutie viabila. Ideea de baza consta in mentinerea bazei de reguli si a numarului extrem de scazut al functiilor de apartenenta si modificarea parametrilor neliniari a, b
si c ce definesc forma functiilor de apartenenta clopot Gauss generalizat, obtinandu-se astfel controlul centrului, pantei si latimii acestei functii in vederea minimizarii criteriilor de performanta trnRMSE si err_max impuse.
Mentionam ca s-au facut incercari de modificare a mai multor tipuri de parametri din cadrul RNA, dintre acestea sugestiva fiind incercarea de modificare simultana a ponderii acordate
fiecarei reguli din cadrul bazei de reguli, fara a se obtine rezultatele superioare scontate. Rutina de optimizare bazata pe strategii de evolutie are urmatoarele caracteristici: • o populatie care contine un singur individ; • un cromozom cu 14 de parametri (cate 3 parametri pentru fiecare din cele 2 functii de
apartenenta triunghiulare ale celor doua marimi de intrare (D si n2I ) si 2 parametri ce definesc singleton-urile marimii de iesire, D∆ );
• o probabilitatea de mutatie de 5 %; • o variatie de 5 % a mutatiei in jurul actualelor valori ale marimilor D si D∆ .
Valorile de mai sus au fost alese folosind o distributie uniforma. Noua partitie a spatiilor de intrare si rezultatele simularilor sunt prezentate la sfarsitul
acestui capitol, dupa 28000 de variatii ale mutatiei. S-a ales aceasta valoare deoarece s-a constat ca un numar sporit de variatii nu aduce imbunatatiri semnificative parametrilor de performanta, iar timpul necesar de procesare creste foarte mult.
Comparativ cu metoda de proiectare bazata pe LF+SE, se remarca calitatea superioara a rezultatelor obtinute folosind metoda NF+SE, valabile pentru toate tipurile de convertoare si folosind mai putine epoci de antrenare.
Prin compararea curbelor N liniarizate pentru familiile de caracteristici externe ale convertoarelor Buck, Boost si Buck – Boost obtinute prin proiectarea RL cu cele doua metode de proiectare (NF si NF+SE), se pot trage urmatoarele concluzii generale:
a) strategiile de evolutie maresc cu 0% pana la 10% saltul D∆ din origine, dar pentru acelasi prag a lui n2I ca la RNF imbunatatesc cu 0% pana la 3000% nivelul lui
n2I limita. Vom da cateva exemple: A. Proiectarea regulatorului de liniarizare pentru convertorul Buck:
• curba D=0.6, prag 3% - rezultate identice NF+SE ca la NF, deci evident 0% imbunatatire;
• curba D=0.25, prag 15%: - proiectare neuro-fuzzy: n2I limita=0,0303;
- proiectare NF+SE: n2I limita=10e-5; B. Proiectarea regulatorului de liniarizare pentru convertorul Boost:
• curba D=0,5, prag 5%: - proiectare neuro-fuzzy: n2I limita=0,0918;
- proiectare NF+SE: n2I limita=0,09; C. Proiectarea regulatorului de liniarizare pentru convertorul Buck-Boost:
• curba D=0,75, prag 10%: - proiectare neuro-fuzzy: n2I limita=0,1221;
- proiectare NF+SE: n2I limita=0,12.

Raport de Cercetare 2011 - 70
b) mai ales in cazul convertorului Buck-Boost se observa imbunatatirea parametrului
n2I limita la nivelul zecimalei a treia, ceea ce inseamna ca SE se pot folosi in proiectarea RNF de o mai mare precizie.
c) trebuie remarcat faptul ca SE continua imbunatatirea criteriilor de performanta atunci cand RNA ce constituie ANFIS se limiteaza ca posibilitati de invatare, fapt ce demonstreaza ca algoritmul hibrid de invatare inglobat in RNA propusa de MatLab poate fi imbunatatit.
7. CONCLUZII 7.1. CONCLUZII PRIVIND CONTRIBUłIILE STIINTIFICE Se aduc aduc contribuŃii la metodelor de comandă şi controlul a convertoarelor electronice de
putere. În acest sens, contractul a avut ca prim obiectiv implementarea metodelor moderne de control bazate pe inteligenŃa artificială în proiectarea controllerului de liniarizare a familiei de caracteristici externe a convertoarelor de c.c. utilizate în sistemele de reglare automată a turaŃiei motoarelor de c.c. Controllerul de liniarizare apare necesar în structurile de reglare tip serie modificate pentru obŃinerea unor mari precizii în reglarea turaŃiei şi limitarea curentului prin motorul de c.c., rolul său fiind cel de preregulator de turaŃie.
În proiectarea controllerelor de liniarizare s-a apelat la teoria logicii fuzzy, teoria reŃelelor neurale adaptive şi la strategiile de evoluŃie, aplicate independent şi în diferite combinaŃii necesare optimizării. Baza matematică dezvoltată în cadrul lucrării, rezultatele obŃinute prin simulare şi comparaŃiile permanente între metodele de proiectare folosite permit menŃionarea sintetică a principalelor contribuŃii originale ale acestei parti a cercetarii: 1. În capitolul 3, paragrafele 2 şi 3 se deduc expresiile matematice şi se crează programele de
reprezentare grafică a familiilor de caracteristici externe ale topologiilor fundamentale de variatoare Boost şi Buck-Boost atunci când acestea sunt utilizate în acŃionările electrice de motoare de c.c. MenŃionăm că principalele tipuri de aplicaŃii ale variatoarelor de c.c. sunt acŃionările electrice şi sursele în comutaŃie, iar literatura de specialitate în domeniul electronicii de putere nu tratează variatoarele Boost şi Buck-Boost decât în scopul utilizării acestora în construcŃia surselor în comutaŃie.
2. În capitolul 4, în baza metodologiei generale, se proiectează în acelaşi stil controllerele fuzzy
de liniarizare pentru 5 convertoare de c.c.: redresorul trifazat comandat cu punct median, redresorul trifazat comandat în punte şi variatoarele Buck, Boost şi Buck-Boost: a) se foloseşte modelul de inferenŃă Mamdani pentru funcŃii de apartenenŃă simetrice şi
echidistante şi se fac studii de caz privind alegerea numărului şi formelor funcŃiilor de apartenenŃă, menŃinând aceeaşi bază de reguli dedusă heuristic:
• se arată că numărul de funcŃii de apartenenŃă trebuie extins între 3 şi 11, faŃă de 5 şi 7 indicat în literatura de specialitate în domeniul controllerelor fuzzy;
• se arată că dintre funcŃiile triunghiulare, trapezoidale şi de tip Gaussian, performanŃele cele mai bune sunt obŃinute cu funcŃiile de apartenenŃă triunghiulare, mai puŃin marginile universurilor discursurilor, unde funcŃiile Gaussiene dau rezultate mai bune. Astfel, se prefigurează controllerele neuro-fuzzy, superioare ca performanŃă în condiŃiile unei baze de reguli foarte mici.
b) pe baza rezultatelor simulărilor, se deduc avantajele şi dezavantajele proiectării RF prin modelul Mamdani:
• avantaje: formele simetrice şi echidistante permit ca în orice moment să fie active doar 4 reguli din întreaga bază de reguli (fapt ce constituie un avantaj faŃă de sistemele expert ce lucrează cu zeci de reguli simultan şi faŃă de RN care utilizează informaŃie nestructurată), folosind operatorul de complementare fuzzy se poate memora în unitatea de calcul doar

Raport de Cercetare 2011 - 71
jumătate din baza de reguli. Ele se pot implementa pe PC, microprocesoare şi procesoare fuzzy dedicate;
• dezavantaje: număr de reguli de ordinul zecilor sau peste o sută, procesare lentă datorită modelului de inferenŃă ales, proiectare nesistematică, erori de proiectare relativ mari într-o gamă restrânsă a universurilor discursurilor mărimilor de intrare.
3. În capitolul 5, se proiectează controllerele fuzzy de liniarizare pentru variatoarele de c.c., atât
pentru o singură curbă a familiei de caracteristici externe, cât şi pentru întreaga familie, folosind modelul de inferenŃă Sugeno. Se fac comparaŃii cu controllerele fuzzy tip Mamdani din capitolul 4 anterior şi se propune o nouă metodă de proiectare combinată LF+SE: a) se propune o nouă metodă de proiectare sistematică a controllerelor; b) se evidenŃiază rezultate superioare prin creşterea numărului de funcŃii de apartenenŃă
simetrice şi echidistante şi, pe baza experienŃei acumulate, se trece la alegerea de funcŃii de apartenenŃă simetrice şi neechidistante în vederea reducerii numărului de reguli din baza de reguli;
c) se identifică operatorii fuzzy şi metodele de fuzzificare şi defuzzificare care conduc la performanŃe îmbunătăŃite;
d) se propun parametri de performanŃă noi, prin analogie cu răspunsul indicial cunoscut din teoria reglării automate, şi se fac aprecieri calitative pe baza acestora;
e) proiectarea optimală se face pe baza criteriilor de eroare pătratică minimă a mărimii de ieşire D∆ din controllerul fuzzy şi criteriul erorii maxime a curbei liniarizate N;
f) se evidenŃiază superioritatea netă a controllerelui fuzzy realizat prin model Sugeno prin: • îmbunătăŃirea rapidităŃii de calcul, deci posibilitate de funcŃionare în timp real; • simplitatea metodelor de fuzzificare şi de defuzzificare; • scăderea pragului limită al curbei N liniarizate (sub 5% pentru RF al convertorului Buck,
7% pentru RF al convertorului Boost şi 12% pentru RF al convertorului Buck-Boost); • gama de variaŃie a mărimilor de intrare este cea maximă posibilă; • număr de reguli mai mic cu performanŃe de reglare superioare g) se optimizează performanŃele RF prin strategii de evoluŃie, care diminuează saltul D∆ din origine cu preŃul creşterii pragului limită fixat N∆ , astfel extinzându-se gama de variaŃie a mărimii de intrare n2I în care curba N liniarizată se menŃine sub pragul prescris N∆ .
4. În capitolul 6, se proiectează controllere neuro-fuzzy de liniarizare pentru variatoarele de c.c.,
atât pentru o singură curbă a familiei de caracteristici externe, cât şi pentru întreaga familie. Se fac comparaŃii cu controllerele fuzzy tip Sugeno din capitolul 5 anterior şi se propune o metodă de proiectare combinată RNF+SE: a) se crează programe de comparaŃie a performanŃelor regulatoarelor fuzzy şi neuro-fuzzy,
ajungându-se la concluzia superiorităŃii celor neuro-fuzzy şi imposibilitatea antrenării celor fuzzy realizatre cu funcŃii de apartenenŃă triunghiulare. Rezultatele simulărilor sunt prezentate când se atinge saturaŃia RNA creată în ANFIS;
b) rezultatele arată reducerea substanŃială a zonei de neliniaritate a curbei N liniarizate şi a pragului limită N∆ sub 5% în toate cazurile;
c) se evidenŃiază potenŃialul formelor funcŃiilor de apartenenŃă tip Gauss de a se adapta foarte bine la baza de date reprezentată de perechile de antrenare, reflectat în reducerea bazei de reguli la doar câteva (2 pentru o singură curbă şi 4 pentru întreaga familie de curbe) şi a numărului de funcŃii de apartenenŃă, uneori cu tendinŃe doar de o singură funcŃie de apartenenŃă pentru mărimea de intrare D.
d) se optimizează performanŃele RNF prin strategii de evoluŃie, care cu preŃul creşterii sub 10% a saltului N∆ din origine, îmbunătăŃesc foarte mult pragul lui n2I limită, fapt ce permite pregulatorului de turaŃie reprezentat de RNF astfel proiectat să acŃioneze aproape în toată gama de variaŃie a lui n2I ;
Raport de Cercetare 2011 - 72
e) concluzia de mai sus demonstrează capacitatea de îmbunătăŃire a algoritmului de învăŃare hibridă propus de MatLab – Fuzzy Tools, deschizând noi perspective de proiectare de algoritmi de învăŃare şi mai performanŃi.
Se impune de asemenea o discuŃie asupra posibilităŃilor de implementare a regulatoarelor proiectate în vederea funcŃionării acestora în timp real în aplicaŃii concrte, atât soft (pentru o comandă ulterioară prin PC, DSP, microcalculator) cât şi hard (co-procesoare sau procesoare fuzzy): ♦ tehnologia dezvoltată de microelectronică permite la ora actuală atingerea maturităŃii în
domeniul controllerelor fuzzy implementate prin funcŃii de apartenenŃă triunghiulare, deoarece procesările efectuate sunt simple şi destul de rapide. La ora actuală există aplicaŃii practice în domeniul electronicii de putere, cu funcŃionare în timp real;
♦ literatura de specialitate arată că controllerele neuro-fuzzy, prin funcŃiile de apartenenŃă Gaussiene solicitate nu sunt la ora actuală exploatate în timp real, eforturile pe plan mondial fiind concentrate în comanda cu acest tip de controllere a DSP-urilor, dezvoltarea unei metodologii mai rapide de proiectare a blocurilor fuzzy adaptive şi căutarea şi/sau crearea de algoritmi de învăŃare mai rapizi şi mai performanŃi pentru sistemele de control complexe;
♦ tehnologia dezvoltată de microelectronică nu permite la ora actuală utilizării “on-line” a rutinelor specifice calculului evolutiv (algoritmi genetici, stategii de evoluŃie, programare dinamică etc), motiv pentru care aceste tehnici de optimizare nu sunt utilizate în prezent decât în faza de proiectare “off-line”.
7.2. DIRECłII NOI DE CERCETARE
Din experienŃa dobândită în proiectarea regulatoarelor prin metode propuse de inteligenŃa artificială, se prefigurează următoarele direcŃii noi de cercetare:
1. extinderea experienŃei de proiectare acumulate asupra celorlalte două regulatoare: RT – regulatorul de turaŃie şi RC – regulatorul de curent, din cadrul SRA cu structură serie modificată propus pentru reglarea turaŃiei motoarelor de c.c.;
2. dezvoltarea de noi aplicaŃii în domeniul acŃionărilor electrice a motoarelor de c.c., tendinŃa fiind către robotică, mecatronică şi viaŃă artificială;
3. extinderea experienŃei acumulate asupra altor sisteme de comandă şi control a convertoarelor specifice domeniului electronicii de putere;
4. conceperea de noi structuri de RNA care să poată conlucra cu regulatoarele fuzzy de liniarizare a caracteristicilor externe ale convertoarelor, create cu funcŃii de apartenenŃă triunghiulare;
5. îmbunătăŃirea sau crearea de noi algoritmi de învăŃare mai performanŃi din domeniul regresiei liniare şi neliniare şi nu numai;
6. descoperirea de noi algoritmi de optimizare în urma dezvoltării ulterioare a domeniului calculului evolutiv, care să poată funcŃiona în timp real;
7. realizarea de noi combinaŃii cu funcŃionare în timp real a domeniilor inteligenŃei artificiale, cu aplicaŃii concrete în domeniul electronicii de putere
8. dezvoltarea bazei matematice de analiză a stabilităŃii întregului sistem de reglare automată cu caracteristici profund neliniare datorate procesului controlat şi regulatorului proiectat prin metode de inteligenŃă artificială;
9. realizarea de procesoare neuro-fuzzy cu funcŃionare în timp real; 10. dezvoltarea microelectronicii pentru a fi în pas cu saltul de inteligenŃă umană din întreg
domeniul inteligenŃei artificiale;

Raport de Cercetare 2011 - 73
INDICATORI DE PERFORMANTA REALIZATI IN ANUL 2011, cu precizarea existentei “acknowledgements”, a stadiului in care se afla articolul
(trimis spre publicare, acceptat, sub evaluare, alte situatii)
• CRITERIUL MINIM DE PERFORMANTA IMPUS PRIN CONTRACT IN ANUL 2011: - 1 articol in revista indexata ISI; - 1 articol in revista indexata BDI
• CRITERIUL DE PERFORMANTA REALIZAT IN ANUL 2011: A1. Articole in reviste ISI (1 articol contractat / 2 articole realizate)
A.1.1. C. Oros, C. Radoi, A. Florescu, “Comparison among Computational Intelligence Methods
for Engine Knock Detection. Part 1”, Revue Roumaine des Sciences Techniques – Serie Electrotechnique et Energetique, Tome 56, no.4, Octobre-Decembre 2011, pp.418-427, Editura Academiei Romane, Bucuresti, Romania, ISSN 0035-4066, Revue inclue dans “Thomson Reuters
Science Citation Index Expanded (also known as SciSearch) and Journal Citation Reports/Science
Edition” – are acknowledgement, (vizibila pe site-ul http://revue.elth.pub.ro/) A.1.2. A. Florescu, C. Oros, A. Radoi, “Comparison among Computational Intelligence Methods
for Engine Knock Detection. Part 2”, Revue Roumaine des Sciences Techniques – Serie Electrotechnique et Energetique, Tome 57, no.1, Janvier-Mars 2012, Editura Academiei Romane, Bucuresti, Romania, ISSN 0035-4066, Revue inclue dans “Thomson Reuters Science Citation Index
Expanded (also known as SciSearch) and Journal Citation Reports/Science Edition” – are acknowledgement, (a primit adeverinta ca este in curs de tiparire)
A2. Articole in reviste BDI (1 articol contractat / 1 articol realizat) A.2.1. D. Oancea, A. Florescu, “Virtual Instrument to Evaluate Parameters of Photovoltaic
Panels”, International Review on Computers and Software (IRECOS), Vol. 6 N. 5, September 2011, ISSN 1828-6003 – Revista indexata Cambridge Scientific Abstracts (CSA/CIG), Academic Search Complete (EBSCO Information Services), COMPENDEX-Elsevier Bibliographic Database, Index Copernicus (Journal Master List)– are acknowledgement, (in curs de tiparire, vizibila pe site-ul http://www.praiseworthyprize.com/IRECOS_latest.html) A3. Brevete nationale (0 brevete contractate / 1 cerere de brevet depusa la OSIM) A.3.1. D. Stanciu, M. Teodorescu, A. Florescu,“Sistem de reglare vectoriala a curentului unei
sarcini multirezonante”, cerere de brevet inregistrata la OSIM cu nr. A/00372/19.04.2011 si finantata de UPB din fondurile prezentului contract ID_1693/2008 – (in curs de examinare, durata de examinare la OSIM fiind de 18 luni de la data inregistrarii) A4. Articole in conferinte BDI (0 articole contractate / 1 articol realizat) A.4.1. D. Stanciu, M. Teodorescu, “A Vector Control System for Multiresonant Loads”, Proceedings of the 7th International Symposium on Advanced Topics in Electrical Engineering (ATEE 2011) printed by Politehnica Press 2011, ISSN 2968-7966, May 12-14, 2011, Bucharest, Romania, pp.309-314. Conform site-ului conferintei http://atee2011.elth.pub.ro/, “The Symposium Proceedings will be included in the IEEE Xplore database and indexed by INSPEC” - are acknowledgement (publicat) A5. Carti in edituri straine (0 capitole contractate / 1 capitol realizat) A.5.1. A. Florescu, C. Oros, A. Radoi, “Engine Kbock Detection based on Computational
Intelligence Methods”, capitol de 28 pagini in cartea “Fuzzy Logic / Book 3”, ISBN 979-953-307-578-4 in editura InTech - are acknowledgement (va aparea print si on-line in martie 2012).