Proiect- Automate programabile
33
Argument Automatizarea este definitã ca ştiinţa care se ocupã cu comanda şi controlul sistemelor.Un sistem este o noţiune abstractã ,care poate fi asociatã cu exemple din lumea realã.Se pot distinge sisteme naturale şi artificiale.Sistemele artificiale sunt create de om,exemple in acest domeniu fiind:automobilul,sistemul energetic,sistemul bancar etc.O altã clasificare a sistemelor se referã la comunicarea cu exteriorul.Astfel,se poate vorbi despre sisteme deschise si sisteme închise.Un sistem deschis rãspunde la stimuli din exterior. Automatizarea,ca ştiintã,a apãrut,practic, în secolul al XIX-lea,odatã cu apariţia primelor maşini de producţie pe scarã largã, îndeosebi în industria textilã.Primele echipamente de comandã şi autoreglaj au fost pur mecanice.La începutul secolului XX au apãrut motoarele electrice.Utilizarea lor în industrie a condus la dezvoltarea domeniului de automatizare electricã: relee,contactoare, întrerupãtoare de putere etc.Electronica s-a dezvoltat datoritã apariţiei radiodifuziunii,in anii ’30 şi a utilizãrii radarului in timpul celui de-al Doilea Rãzboi Mondial.De la descoperirea tranzistorului,in anii ’50 şi pânã la apariţia circuitelor integrate pe scarã largã (VLSI) au trecut numai 10 ani.În anii ’70 au apãrut primele microprocesoare,iar pentru folosirea lor s-au conceput sisteme de operare şi limbaje de programare.Limbajele de nivel înalt: BASIC,Pascal,C etc.au apãrut ca o necesitate de a
-
Upload
nen-crina-mihaela -
Category
Documents
-
view
308 -
download
20
description
Automate programabile
Transcript of Proiect- Automate programabile
Argument
Automatizarea este definitã ca ştiinţa care se ocupã cu comanda şi controlul sistemelor.Un sistem este o noţiune abstractã ,care poate fi asociatã cu exemple din lumea realã.Se pot distinge sisteme naturale şi artificiale.Sistemele artificiale sunt create de om,exemple in acest domeniu fiind:automobilul,sistemul energetic,sistemul bancar etc.O altã clasificare a sistemelor se referã la comunicarea cu exteriorul.Astfel,se poate vorbi despre sisteme deschise si sisteme închise.Un sistem deschis rãspunde la stimuli din exterior.
Automatizarea,ca ştiintã,a apãrut,practic, în secolul al XIX-lea,odatã cu apariţia primelor maşini de producţie pe scarã largã, îndeosebi în industria textilã.Primele echipamente de comandã şi autoreglaj au fost pur mecanice.La începutul secolului XX au apãrut motoarele electrice.Utilizarea lor în industrie a condus la dezvoltarea domeniului de automatizare electricã: relee,contactoare, întrerupãtoare de putere etc.Electronica s-a dezvoltat datoritã apariţiei radiodifuziunii,in anii ’30 şi a utilizãrii radarului in timpul celui de-al Doilea Rãzboi Mondial.De la descoperirea tranzistorului,in anii ’50 şi pânã la apariţia circuitelor integrate pe scarã largã (VLSI) au trecut numai 10 ani.În anii ’70 au apãrut primele microprocesoare,iar pentru folosirea lor s-au conceput sisteme de operare şi limbaje de programare.Limbajele de nivel înalt: BASIC,Pascal,C etc.au apãrut ca o necesitate de a scurta timpul necesar dezvoltãrii de programe complexe.
În industrie,microprocesoarele s-au folosit pentru comandã,control şi reglare automatã a proceselor continue. În acest sens s-a dezvoltat Automatul Programabil,care este cel mai general echipament de automatizare industrialã cu microprocesor.Din Automatele Programabile au derivate Controller-e cu microprocesor specializate pentru diverse tipuri de aplicaţii industriale: reglarea temperaturii şi debitelor,reglarea turaţiei motoarelor electrice,programarea maşinilor-unelte,programarea roboţilor etc.
CAP. I Utilizarea Automatelor Programabile
Primul automat programabil a fost dezvoltat de un grup de ingineri de la General Motors in 1968,atunci când compania cãuta o alternativã pentru a schimba sistemul de control.Noul sistem întrunea urmãtoarele cerinţe: necesita o programare simplã,modificarea programului se putea face fãrã intervenţia în sistem,iar aparatul era simplu,mic,ieftin şi mult mai sigur decât vechiul sistem de control;costurile de întreţinere erau,de asemenea,mici.
Automatele Programabile au apãrut în aplicaţiile industriale începând cu anul 1975.Ele au fost dezvoltate în special pentru sectorul industrial de cãtre producãtorii de calculatoare.Din aceastã cauzã,arhitectura internã a automatelor programabile se aseamanã cu cea a calculatoarelor personale.
Dacã,la început, automatul programabil avea rolul de a înlocui numai releistica de comandã logicã,pe parcurs, în automatul programabil s-au încorporat temporizatoarele şi numãrãtoarele.Dezvoltarea convertoarelor analog/digitale (CAD) şi digital/analogice (CDA) a permis utilizarea automatelor programabile în bucle de reglaj a proceselor.Astfel într-un automat programabil modern se regãsesc toate instrumentele de care este nevoie pentru realizarea automatizãrii unui proces industrial.
Principalele caracteristici ale unui automat programabil sunt: -sã înteleagã un limbaj de programare orientat pentru operaţii de
logicã binarã;-sã permitã crearea unei secvenţe de control a sistemului,precum şi
utilizarea de temporizatoare (timer) şi numãrãtoare (counter) ;-sã permitã conectarea cu o consolã de programare şi diagnosticare;-sã permitã o comunicare eficientã cu consola de programare,cu alte
Automate Programabile sau cu calculatoare industriale. Î n prezent,tendinţa în construcţia automatelor programabile este de a se atinge nivelul de complexitate al calculatoarelor personale.Aceastã reorientare se explicã prin nevoia de creare de soft cu ajutorul mediului grafic ( ex.: Windows9x,Windows 2000 ),precum şi prin ieftinirea componentelor hardware utilizate la construcţia PC-urilor.
1.1 Comparaţie între un automat programabil şi un calculator industrial ( IPC )
Un AP se diferenţiazã de un calculator industrial prin faptul cã utilizeazã un alt fel de sistem de operare.Un AP trebuie sã suporte variabile
binare ( de 1 bit ),operaţii logice şi o uşoara utilizare a timer-elor şi counter-elor.Un calculator industrial poate înlocui oricând un AP dacã se utilizeazã programe şi module de intrãri/i şiri corespunzãtoare.Un AP nu poate simula un calculator industrial.Microprocesorul utilizat de un AP poate fi identic cu cel al unui calculator industrial.
Evaluarea performanţelor unui AP se mãsoarã în numãrul de instrucţiuni executate în unitatea de timp ( MIPS – Million de Instrucţiuni Pe Secundã ).La calculatorul industrial,performanţa microprocesorului se testeazã prin numãrul de calcule în virgule mobile pe unitatea de timp.
1.2 Domenii de aplicare ale automatelor programabile
Orice sistem sau maşina are un sistem de control. În funcţie de tipul tehnologiei folosite,sistemul de control poate fi: pneumatic,hidraulic,electric,electronic.Frecvent,se folosesc combinaţii ale acestora.
Aplicaţii practice pentru sisteme de control se întâlnesc: la maşinile de spãlat automate,camere video,autovehicule etc.
Dacã felul acţiunii maşinii ( sarcina pe care trebuie sã o îndeplineascã ) nu implicã folosirea unui sistem de control special sau dacã utilizatorul trebuie sã aibã posibilitatea de a simplifica,de a face schimbãri în program sau setãri diferite pentru diverşi parametri ( ex. Temporizãri ),atunci se preferã utilizarea unui sistem de control universal. Automatul programabil reprezintã un astfel de sistem de control universal.El poate fi folosit pentru aplicaţii diferite şi – datoritã programului instalat în memorie – furnizeazã utilizatorului cãi simple de schimbare,extindere şi optimizare a procesului de control.
Rolul propriu al unui automat programabil implicã realizarea unei corespondenţe între semnalele de intrare cu cele de ieşire ale automatului programabil.Corespondenţele se fac cu ajutorul unor funcţii logice programate de utilizator.Algebra booleanã alcatuieşte bazele matematice pentru utilizarea eficientã a acestor funcţii logice.O intrare digitalã poate avea o tensiune sau un curent electric,iar în AP aceastã marime este convertitã într-un semnal binar ce poate avea doar douã valori: “0” sau “1”.O ieşire poate lua,de asemenea,una dintre cele douã valori.
Observaţie:Un motor poate fi conectat sau deconectat.
Aceastã funcţionare este similarã cu funcţionarea unui automat programabil; relaţia intrare-ieşire este similarã cu funcţionarea unui releu electromagnetic sau a unei valve pneumatice; programul este stocat în memoria electronicã.
Funcţiile de temporizare,numãrare,setãrile de memorie,operaţiile de calcul matematic sunt funcţii care pot fi executate de orice automat programabil din ziua de azi.Cerinţele ce trebuie îndeplinite de un automat programabil cresc odatã cu extinderea rapidã a folosirii lor şi cu dezvoltarea tehnologiilor de automatizare.
Un automat programabil poate controla şi facilita intervenţia în procesul de control sau,dimpotrivã,poate face imposibil accesul utilizatorului neautorizat.
Foarte curând va deveni necesarã interacţiunea dintre sistemele individuale controlate prin automate programabile cu mijloacele tehnologiilor de automatizare;
Prin urmare,un computer va facilita urmãrirea la nivel înalt a comenzilor pentru procesarea programelor câtorva sisteme cu automate programabile.
Pentru a forma reţele din automate programabile sau dintr-un automat programabil si un computer de comandã se folosesc interfeţe de comunicare.Acest lucru este posibil deoarece multe dintre cele mai recente automate programabile sunt compatibile cu sistemele standardizate ( ex.: Profibus DIN19245 ).Datoritã performanţelor ridicate ale automatelor programabile,ele îşî pot asuma funcţia unui computer conducãtor.Prin urmare,un automat programabil este nimic mai mult decât un computer,având sarcini precise de control.
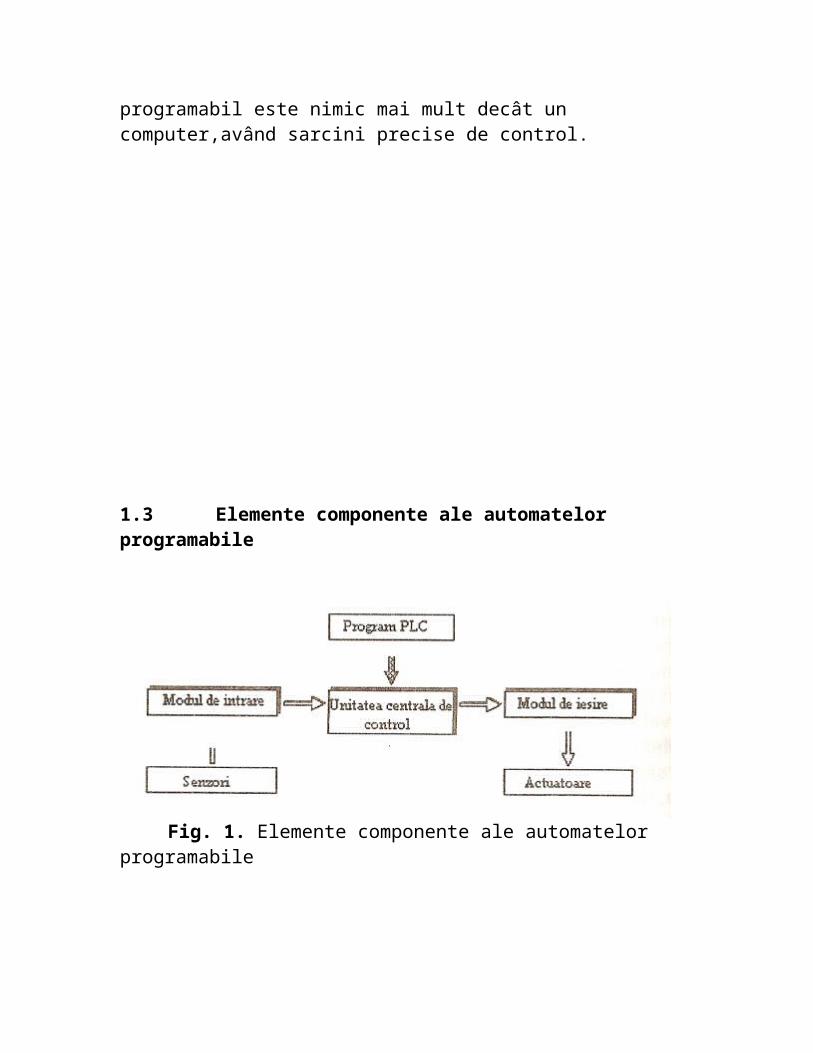
1.3 Elemente componente ale automatelor programabile
Fig. 1. Elemente componente ale automatelor programabile
Funcţia unui modul de intrare este de a transforma semnalele primare in semnale care pot fi procesate de automatul programabil şi de a le transfera la unitatea centralã.Funcţia de transformare este prelucratã de un modul de ieşire.care converteşte semnalul automatului programabil într-un semnal adecvat pentru elementul activ.Procesarea semnalelor este efectuatã în unitatea centralã, în concordanţã cu programul stocat în memorie.
În funcţie de modul cum este conectatã unitatea centralã la modulele de intrare şi ieşire,se deosebesc automate programabile compacte ( unitatea centralã şi modulele de intrare-ieşire în aceeaşi carcasã ) sau automate programabile modulare.
1.4 Instalarea şi punerea în funcţiune a unui automat programabil
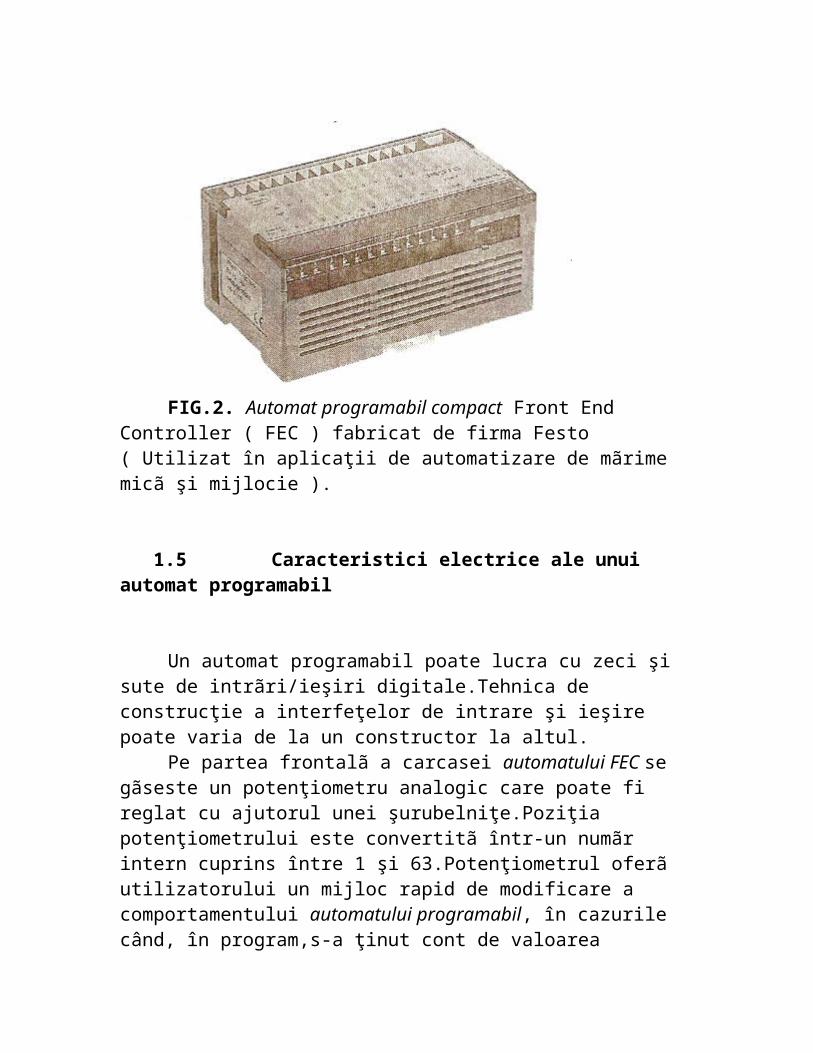
Un automat programabil este un sistem de control economic,compact şi inteligent la care interfeţele de intrare/ieşire sunt conectate la o magistralã de comunicaţie cu unitatea centralã.Un exemplu de automat programabil compact se poate vedea în figura 2.
La instalarea şi punerea în funcţiune a unui automat programabil se au în vedere câteva reguli.Astfel,aparatul nu trebuie sã se instaleze în zone care prezintã: densitate mare de praf,ceaţã de ulei,praf conductor electric,gaz coroziv; vibraţii sau şocuri; temperatura ridicatã,expunere directã la soare,umiditate sau ploaie; în apropierea echipamentelor de înaltã tensiune sau de mare putere.
FIG.2. Automat programabil compact Front End Controller ( FEC ) fabricat de firma Festo ( Utilizat în aplicaţii de automatizare de mãrime micã şi mijlocie ).
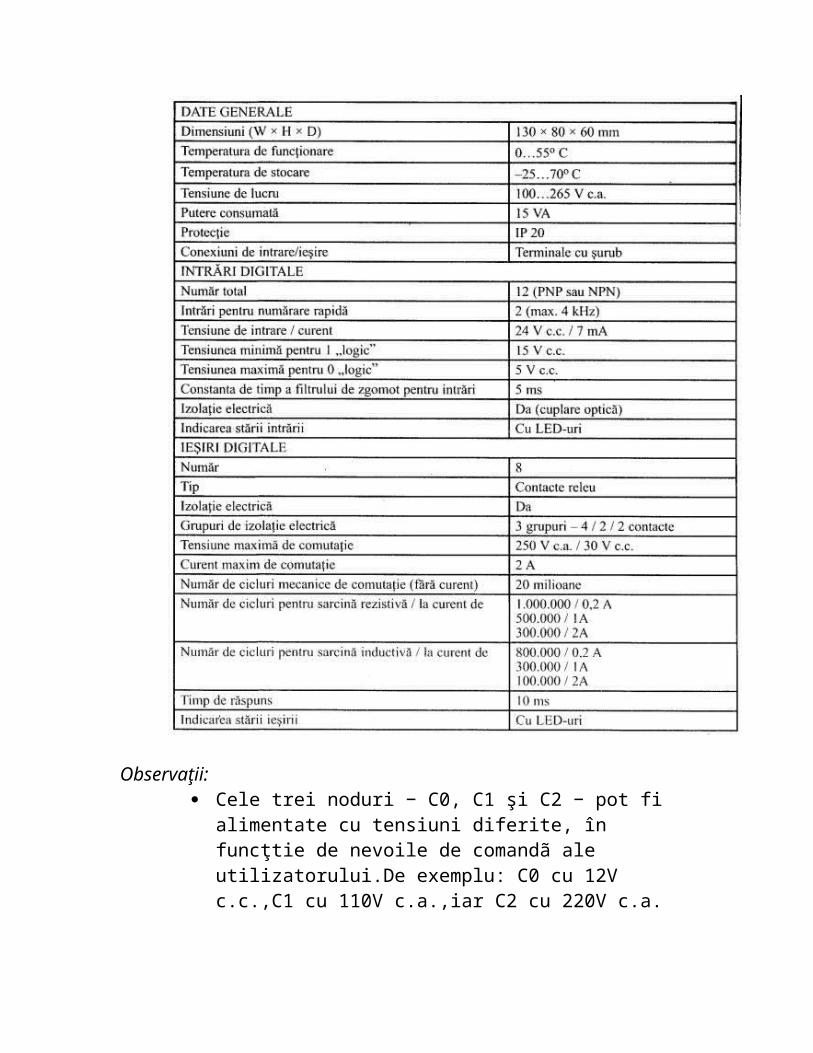
1.5 Caracteristici electrice ale unui automat programabil
Un automat programabil poate lucra cu zeci şi sute de intrãri/ieşiri digitale.Tehnica de construcţie a interfeţelor de intrare şi ieşire poate varia de la un constructor la altul.
Pe partea frontalã a carcasei automatului FEC se gãseste un potenţiometru analogic care poate fi reglat cu ajutorul unei şurubelniţe.Poziţia potenţiometrului este convertitã într-un numãr intern cuprins între 1 şi 63.Potenţiometrul oferã utilizatorului un mijloc rapid de modificare a comportamentului automatului programabil, în cazurile când, în program,s-a ţinut cont de valoarea acestuia.Utilizarea potenţiometrului se activeazã sau se dezactiveazã cu ajutorul programului de configurare a automatului programabil.
Intrãrile digitale ale automatului programabil formeazã douã grupuri de 8,respectiv 4 intrãri. În interiorul automatului programabil,toate intrãrile dintr-un grup sunt conectate la un nod comun: S0 pentru primele 8, S1 la ultimele 4 ( vezi şi figura 3).
Exemplul 1:Intrãrile automatului programabil FEC:
Conectarea senzorilor de tip PNP: nodul comun S0 ( sau S1 ) leagã la tensiunea de 0 V,iar un senzor de câmp ( limitator,buton etc.) comutã,la intrare,o tensiune de 24 V;
Conectarea senzorilor de tip NPN: nodul comun S0 ( sau S1 ) este conectat la o tensiune de 24 V,iar un senzor de câmp comutã,la intrare,o tensiune de 0 V.
Observatie:Deoarece intrãrile au separare opticã ( LED → fotodiode ), semnalul
de intrare este generat de curentul care se va stabili prin una din cele douã fotodiode legate în antiparalel.De aceea,nu conteazã polaritatea la borne.Aceastã caracteristicã reprezintã o flexibilitate înconectarea senzorilor care pot fi PNP sau NPN.
Ieşirile automatului FEC sunt in numãr de 8.Ca şi la intrãri,existã grupuri de ieşiri care sunt conectate la acelaşi nod, în interiorul automatului programabil (vezi şi figura 3).
Exemplu 2:Iesirile automatului programabil FEC:La automatul programabil existã trei grupuri: primele patru ieşiri
formeazã primul grup,urmãtoarele douã,al doilea,iar ultimele douã ieşiiri reprezintã cel de-al treilea şi ultimul grup.Notaţia nodurilor este: C0, C1 şi C2. În schema posturilor de lucru,cele trei noduri sunt alimentate din exterior cu 24 V c.c.La comanda de activare a unei ieşiri releul acesteia se închide,la borna ieşirii fiind disponibili 24V.
- 8 -Caracteristici electrice ale FEC
Observaţii:
Cele trei noduri − C0, C1 şi C2 − pot fi alimentate cu tensiuni diferite, în funcţtie de nevoile de comandã ale utilizatorului.De exemplu: C0 cu 12V c.c.,C1 cu 110V c.a.,iar C2 cu 220V c.a.
Pentru protecţia la scurtcircuit a releelor de ieşire se pot monta siguranţele fuzibile între sursele de tensiune şi bornele C0,C1 si C2.
Tot pentru protecţia releelor,la sarcini inductive semnificative,se pot monta diode de drum liber în paralel cu fiecare releu.Mãsurile de siguranţã prezentate mai sus au rolul de a prelungi durata de viaţã a FEC-ului,dat fiind faptul cã releele sunt cele mai sensibile piese ce intrã în componenţa acestuia.
CAP.II Microprocesoare
Automatul programabil ( Programmable Logic controller − PLC ) reprezintã un element important în automatizarea industrialã.
Automatul programabil este un sistem electronic de operare digitalã,realizat pentru folosirea în industrie;el utilizeazã o memorie internã programabilã şi executã funcţii logice,de temporizare,de numãrare,aritmetice,de control asupra intrãrilor si ieşirilor ( analogice şi digitale ) pentru tipuri de procese şi maşini variate.Printr-un calculator asociat (şi perifericele sale ),PLC este astfel realizat incât sã poata fi integrat într-un sistem de control (reglare ) industrial.
Acest capitol explicã arhitectura automatului programabil şi interactiunea acestuia cu perifericele.
Orice sistem/maşina are un “controller”. În funcţie de tehnologia utilizatã,”controller”-ele pot fi: pneumatice,hidraulice,electrice sau electronice.
Aplicaţii tipice pentru “controller”-e sunt la: maşinile de spãlat automate,camerele video,automobile etc.Uneori sunt necesare “controlle”-e universale cu un program special înscris în memorie.PLC reprezintã un astfel de ”controlle”.Acesta poate fi folosit pentru diferite aplicaţii,prin programul înscris în memoria electronicã,oferã utilizatorului metode simple de schimbare,extinderea şi optimizarea controlului procesului industrial.Denumirea ( programmable login controller ) sugereazã scopul în care este utilizat.
2.1 Microcomputer
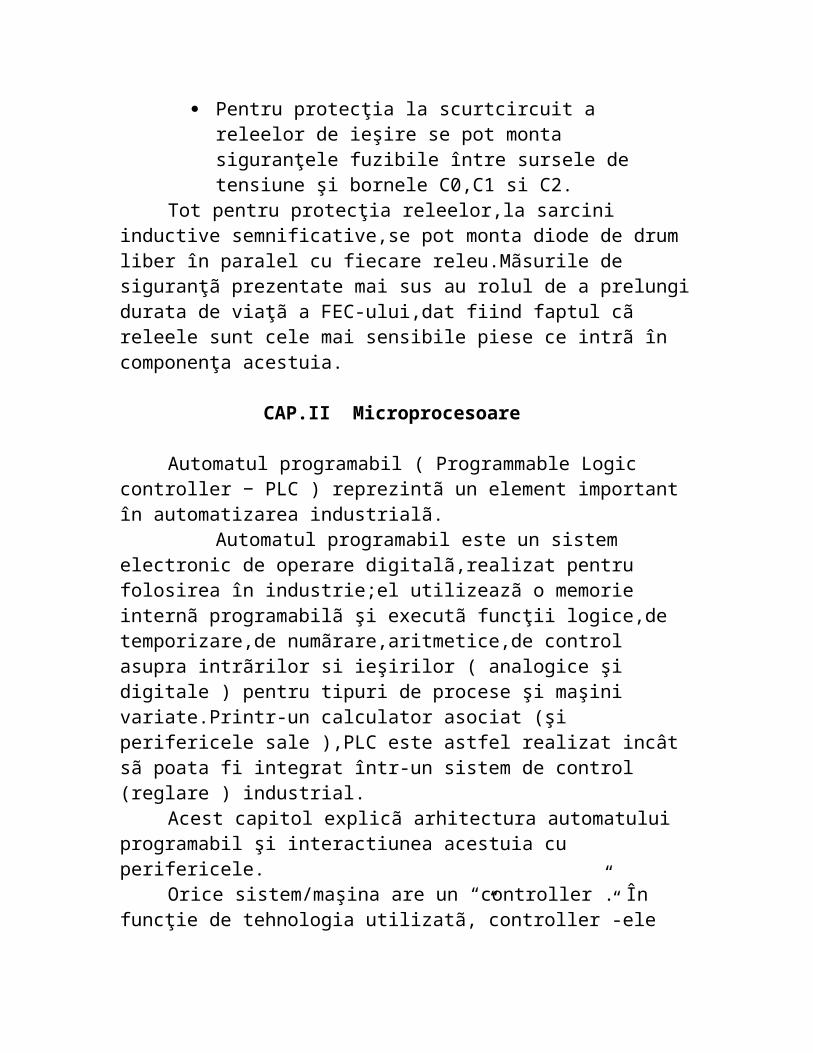
Fig. 3. aratã alcãtuirea unui microcomputer.Acesta se bazeazã pe trei pãrti principale: hardware,firmware şi software.
Fig.3.Arhitectura de baza a unui microcomputer.Hardware reprezintã dispozitivele tehnologiei actuale,placa de
bazã,circuitele integrate,firele conductoare,bateria etc.Firmware este partea de software,care este instalata permanent de
catre fabricantul de PLC.Aceasta include subprogramul de pornire a procesorului.Sistemul de operare,de obicei,este memorat in ROM ( read-only-memory ),sau in EPROM.
Software este programul utilizatorului ( User programs ) scris de utilizatorul PLC.Acest program este instalat în memoria RAM ( random access memory ),şi poate fi oricând modificat.
PLC-hardware funcţioneaza împreunã cu un sistem de magistrale.Acestea sunt cãi electrice pe care circulã informaţia.Ele sunt separate în magistrale de adrese,de date şi de control.
2.2 Microprocesorul
Microprocesorul reprezintã inima unui microcomputer.Deci,microprocesorul nu este un calculator,ci numai o parte a sa,inglobând, în general,dispozitivul aritmetic şi dispozitivul de comandã.
Microprocesorul este un circuit integral complex,care este capabil de a efectua operaţii aritmetice şi logice sub controlul unui program.
Arhitectura este cea mai simplã a unui microprocesor,care poate fi regãsitã în forme asemãnãtoare la majoritatea microprocesoarelor,este prezentatã în figura 4.
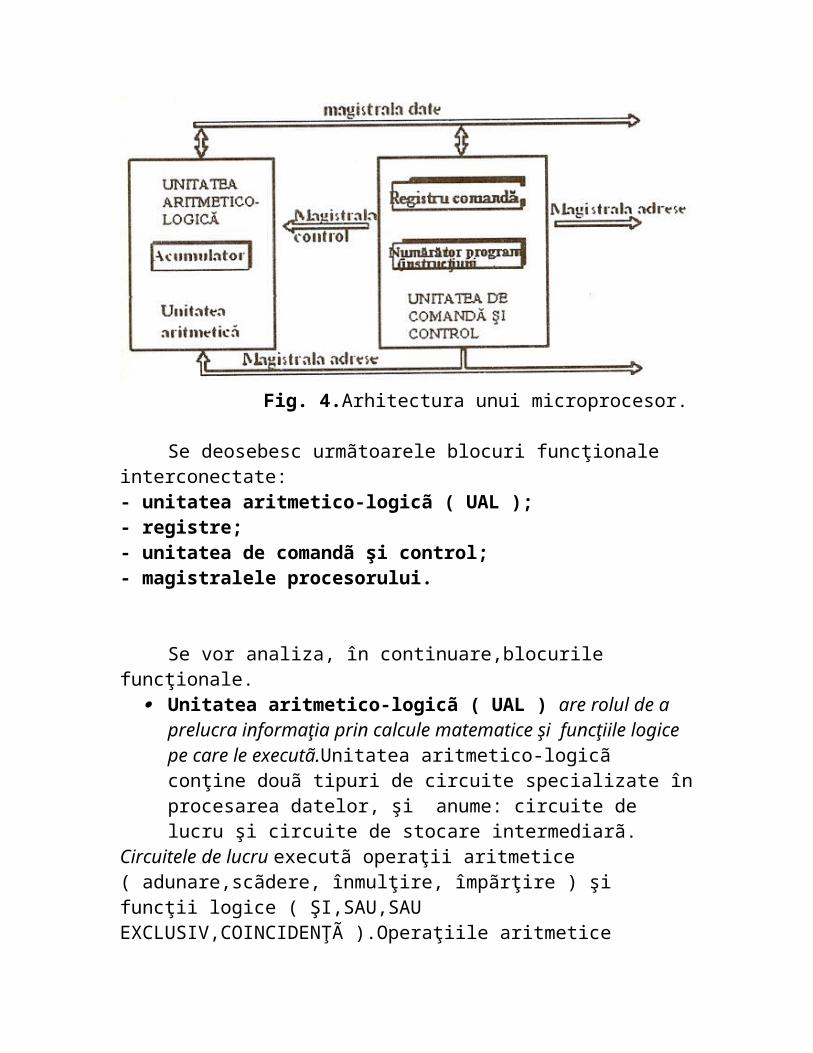
Fig. 4.Arhitectura unui microprocesor.
Se deosebesc urmãtoarele blocuri funcţionale interconectate:- unitatea aritmetico-logicã ( UAL );- registre;- unitatea de comandã şi control;- magistralele procesorului.
Se vor analiza, în continuare,blocurile funcţionale. Unitatea aritmetico-logicã ( UAL ) are rolul de a prelucra
informaţia prin calcule matematice şi funcţiile logice pe care le executã.Unitatea aritmetico-logicã conţine douã tipuri de circuite specializate în procesarea datelor, şi anume: circuite de lucru şi circuite de stocare intermediarã.
Circuitele de lucru executã operaţii aritmetice ( adunare,scãdere, înmulţire, împãrţire ) şi funcţii logice ( ŞI,SAU,SAU EXCLUSIV,COINCIDENŢÃ ).Operaţiile aritmetice efectuate au loc in paralel asupra tuturor biţilor cuvântului şi conţinutul unui registru.
Prin intermediul operatorilor logici este posibilã efectuarea iteraţiilor ( un numãr de reluãri ale prelucrãrii informaţiei în anumite condiţii precizate ),ramificãri de execuţie şi testare.
Circuitele de stocare intermediarã sunt registre si memorii specializate,ce permit inregistrarea la fiecare operaţie a operanzilor şi rezultatelor intermediare.Tot în UAL se gãsesc o serie de circuite basculante bistabile numite indicatori de condiţie,care au rolul de a memora condiţiile
specifice prin care trece acesta în urma efectuãrii operaţiilor aritmetice şi logice.
Registrele microprocesorului pot pãstra operanzii şi rezultatele intermediare.Ele sunt conectate la magistrala internã prin intermediul unui multiplexor,care selecteazã conţinutul unuia dintre ele.Evolutiv,registrele microprocesorului au avut valori tot mai mari,de la 8 biţi,la 32 şi 64 biţi.În afara registrelor cu destinaţie generalã sunt registrele de adresare conectate direct la magistrala de adrese externã.Numãrãtorul program ( de adrese ) conţine, în orice moment,adresa instrucţiunii ce urmeazã a fi executatã.Registrele de stare caracterizeazã unitatea centralã.Registrele de stivã gestioneazã informaţii şi date utile prelucrãrilor viitoare pentru ca,pe masurã ce microprocesorul ruleazã un program,apare necesitatea de a ştii în orice moment unde se aflã şi ce are de fãcut.Un ultim registru care trebuie amintit este registrul de instrucţiuni,care pãstreazã codul operaţiei instrucţiunii în curs de execuţie.
Unitatea de comandã şi control ( UCC ) este blocul funcţional cel mai complex al unui microprocesor.Ea prelucreazã instrucţiunile programului ce se aflã în execuţie.UCC genereazã secvenţa semnalelor necesare pentru execuţia fiecãrei operaţii efectuate de microprocesor.Unitatea de comandã şi control genereazã atât semnalele de comandã necesare sincronizãrii operaţiilor interne din microprocesor,cât şi a schimbului de informaţii dintre acesta şi memorie,respectiv circuitele de interfatã.Comunicarea cu exteriorul se realizeazã pe magistrala de comandã şi control.Succesiunea semnalelor de comandã sunt memorate într-o memorie ROM,neaccesibilã utilizatorului.
Magistralele procesorului reprezintã suportul fizic de transmitere a informaţiei sau semnalelor,grupate pe funcţiuni.Magistralele sau bus-urile reprezintã trasee informaţionale prin care circulã unidirecţional sau bidirecţional biţii de informaţie între diferitele blocuri componente ale microprocesorului.Dupã funcţiile îndeplinite de semnalele transmise deosebim urmãtoarele tipuri de magistrale:
- magistrale de date,pe care se transmit datele schimbate între module.Numãrul de linii al magistralei depinde de numãrul de biţi din care este format cuvântul de date al microprocesorului;- magistrale de adrese selecţioneazã sursa sau destinaţia semnalelor de pe o magistralã ( fie adresa unui cuvânt din memorie,fie adresa unui circuit de interfatã );
- magistrale de comandã asigurã sincronizarea operaţiilor sistemului şi pe ele se transmit informaţii de stare şi de comandã indreptate cãtre ( sau de la ) microprocesor.
2.3 Modul de lucru al unui microprocesor
Calculatorul proceseazã programul linie cu linie.Pentru automatele programabile (PLC ),programul este scris sub forma unui program-text ( statement list ) sau program-grafic ( ladder diagram,sequential function chart ). În toate aceste cazuri rezultã un program sub formã de linii,procesate linie dupã linie.
Analiza şi execuţia unei instrucţiuni într-un microprocesor este reprezentatã în figura 5.
Analiza şi execuţia unei instrucţiuni într-un microprocesor presupune douã cicluri:
- ciclul de extragere ( instruction fetch );- ciclul de execuţie ( instruction execute ).
În ciclul de extragere pe magistrala de adrese se transmite conţinutul numãrãtorului de adrese în acelaşi timp cu comanda de citire a memoriei.Dupã un timp ( numit timp de acces,de ordinul nanosecundelor ),memoria depune pe magistrala de date conţinutul cuvântului de memorie selectat.Acest conţinut este depus în registrul de intrucţiuni al microprocesorului.
În ciclul de execuţie,unitatea de comandã şi control,folosind semnalele obţinute prin decodificarea conţinutului registrului de instrucţiuni,de comanda executãrii instrucţiunii implicate.
Un program pe care trebuie sã-l execute un microprocesor se compune din mai multe instrucţiuni,care se executã,dupã cum s-a menţionat secvenţial.Microprocesorul realizeazã acest lucru incrementând cu unu ( adunând unu ) conţinutul numãrãtorului de adrese.Microprocesorul parcurge, în mod repetat,ciclurile de extragere şi execuţie,analizând secvenţial instrucţiunile înscrise în memorie.Toate operaţiile se executã sincronizat,momentele de timp sunt fixate de un generator de tact cu cuarţ.
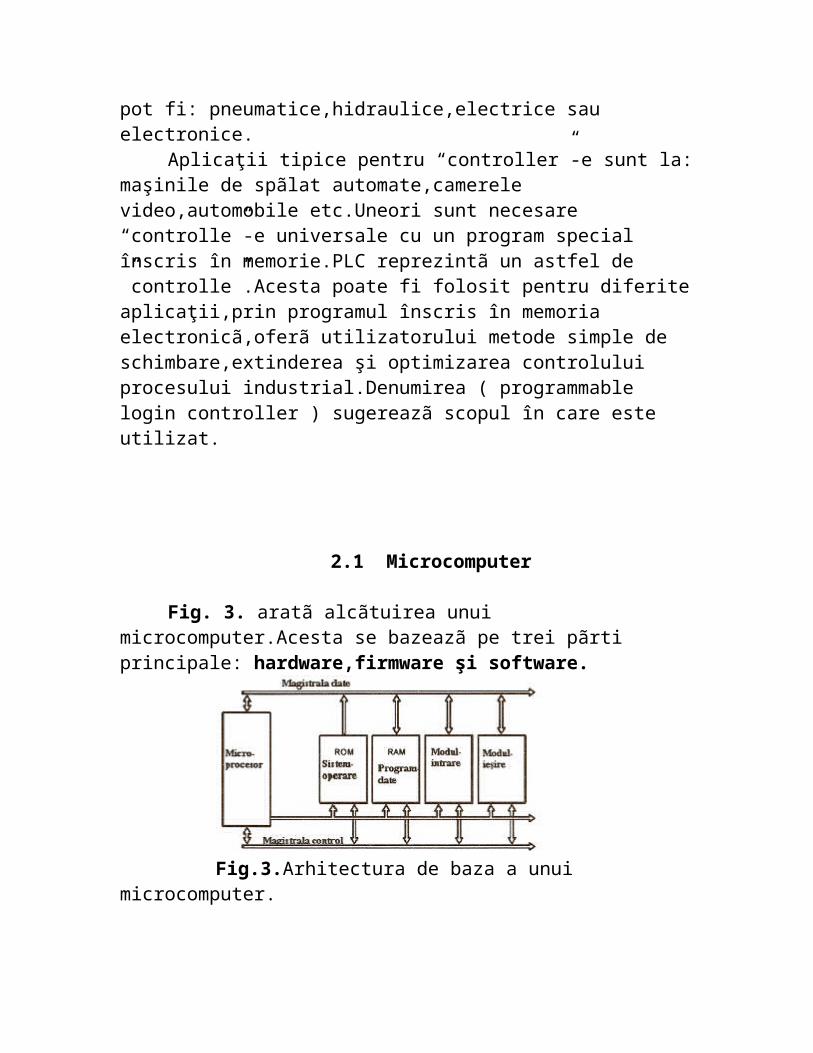
Fig. 5. Modul de lucru al unui microprocesor.
2.3 Evoluţia microprocesoarelor
Procesorul 4004 ( 8 biţi,2300 de tranzistoare integrate pe pastila de serviciu,viteza de lucru de 750 Khz. ) a fost urmat de procesoarele 8008,8080,8086 ( varianta integralã de 16 biţi ).
Primul microprocesor a fost 8088,realizat, în 1978,de corporaţia INTEL pentru calculatoare personale IBM – cunoscutã şi sub numele de XT-uri ( Extendend Tehnology ).Microprocesorul INTEL 80286,ce integra 30 de mii de tranzistoare a fost introdus pe piaţã în anul 1984.Coprocesorul matematic,care suplimenta puterea de calcul a procesorului,s-a numit 80287 iar maşinile echipate cu ele AT-uri (Advanced Tehnology). În 1986 apare INTEL 80386.Modelul 386DX integreazã 275 de mii de tranzistoare,o arhitectura pe 32 de biţi,20 de Mhz.Microprocesorul 80486 a fost lansat în 1989; înglobeaza 1,2 milioane de tranzistoare,structura completã pe 32 de biţi,poate accesa 64 GB de memorie externã şi include coprocesorul matematic.Urmaşul microprocesorului 80486 s-a numit Pentium, cu cea mai importantã diferentã cã poate sã execute mai mult de o instrucţiune pe un tact. În 1996 a fost realizat Pentium PRO care poate prelucra şi executa în paralel trei instrucţiuni pe durata unui tact.Cipul înglobeazã 15,5 milioane de tranzistoare. Microprocesoarele care au urmat şi cele ale anilor viitori vor avea şi mai multe tranzistoare integrate pe cip,vor executa şi mai multe instrucţiuni per ciclu maşina.
CAP.III Memorii
Termenul de “memorie” are o semnificaţtie destul de largã.În întelesul strict,memorie poate sã însemne orice dispozitiv care
pãstreazã informaţii sub formã binarã în circuite integrate specializate.Toate calculatoarele şi automatele programabile funcţioneaza folosind semnale binare sau digitale,care pot lua douã valori.Aceste valori sunt:
“0”sau”1”,numite valoare micã (“low”) şi valoare mare (“high”).Aceste semnale pot fi foarte uşor realizate cu contacte.Un contact deschis corespunde la 1-logic şi unul închis corespunde la 0-logic.Pentru fiecare din cele douã valori se atribuie un domeniu de tensiuni.Rolul contactului poate fi îndeplinit de un tranzistor,ce este comandat pentru a realiza cele douã stãri.
Se deosebesc douã aspecte ale funcţiei de memorare aferente unui sistem elecgtronic de calcul:
- memoria internã ce opereazã nemijlocit cu microprocesorul;- memoria externã ce reprezintã un mediu de stocare pentru date în
scopul reutilizãrii acestora.
Memorii utilizate în automate programabilePartea de software,care este instalatã permanent de cãtre fabricantul
de PLC,include subprogramul de pornire a procesorului.Sistemul de operare,de obicei,este memorat în ROM (read-only-memory ),sau în EPROM.
Programul utilizatorului ( User programs ),scris de utilizatorul automatului programabil,este instalat în memoria RAM ( random access memory ), şi poate fi oricând modificat.
Cele mai folosite memorii în automatele programabile sunt:1. RAM2. EPROM3. EEPROMMemoria RAM ( Random Access Memory – memoria cu acces aleator )Memoriile RAM pot fi atât citite,cât şi scrise ( read/write ), şi pot fi
uşor programate şi modificate.Dezavantajul memoriilor RAM este cã sunt volatile şi datele memorate pot fi pierdute.Din acest motiv,memoriile RAM sunt alimentate cu acumulatoare.
Memoria ROM ( Read Only Memory ) este un circuit integrat care stocheazã informaţii pentru totdeauna.Ea nu poate fi decât cititã.
Memoria ROM nu poate fi nici ştearsã şi nici actualizatã.variante constructive ale memoriei ROM sunt PROM ( Programmable ROM ) şi EPROM ( Erasable Programmable ROM ).Memoria tip PROM se poate programa în condiţii speciale.Odatã programatã va deveni read-only adicã ROM.Memoria EPROM are proprietatea de a fi stearsã şi deci reprograma
Memoria de tip EPROM ( Erasable Programmable Read-Only Memory ) are un cost scãzut,ca şi memoria de tip RAM şi în plus este nevolatilã ( conţinutul memoriei rãmâne intact în cazul întreruperii alimentãrii cu tensiune ).Pentru modificarea conţinutului memoriei EPROM, acesta este şters ( cu un dispozitiv special de ştergere ) şi complet reprogramat ( folosindu-se o unitate de programare ).
Fig. 6.Exemplu de memorie EPROM
Memoria EPROM ( electrically erasable programmable ROM ) este o memorie ce poate fi stearsã ( folosind un semnal electric ) şi reprogramatã.
Programele,special dezvoltate pentru aplicaţiile cu automate programabile,conţin un program de memorare prin care unitatea de comandã şi control citeste ciclic memoria.
Cerinţele unui program de memorare sunt:- trebuie sã fie simplu de modificat,de realizat şi de stocat cu
ajutorul unui dispozitiv de programare sau al unui PC;- sã asigure siguranţa cã programul nu poate fi pierdut în cazul unei
întreruperi/fluctuaţii de tensiune;- sã aibã un cost scãzut;- programul de memorare sã fie suficient de rapid pentru a nu
produce întârzieri unitãţii centrale de comandã şi control.
Principalele unitãţi de mãsurã pentru memorie ( stabilite de INTEL )
Aplicaţiile actuale au nevoie de mii de octeţi de memorie.Aceşti multipli ai octetului au prefixe derivate din greceşte,aceleaşi ca şi sistemul metric,sistemul este diferit.Deşi prefixul grecesc Kilo înseamna o mie, în informaticã i s-a atribuit valoarea 1024,adicã valoarea lui 2¹º.
- 16 -Unitãţile de mãsurã pentru stocarea datelor
Concluzii:RAM ( Random Access Memory – memoria cu acces aleator );
memorie al cãrei conţinut poate fi atât citit cât şi modificat ( scris ).Read-only memoryRead-only memory ( ROM ): memorie al cãrei coţinut poate fi numai
citit.EEPROM
Dezvoltarea memoriei EEPROM.Un impuls electric este folosit pentru ştergerea conţinutului memoriei şi o nouã informaţie poate fi înscrisã în memorie.
EPROMRead-only memory,al cãrei conţinut este şters cu lumina UV şi care
poate fi înscrisã cu o nouã informaţie.
- 17 -3.1 Intrãrile şi ieşirile fizice ale automatelor programabile
În figura 7 este reprezentat modul de conectare al unui automat programabil.Prin automatul programabil,maşinile şi procesele industriale sunt controlate cu ajutorul unui program.Pe lângã automatul programabil – Programmable logic controller ( PLC ) - sunt necesare:
Senzori – componente localizate direct în procesul sau maşina ce trebuie controlatã şi prin care automatului programabil îi este prezentatã situaţia în fiecare moment.
Actuatori – componente localizate direct în procesul sau maşina ce trebuie controlatã şi prin care automatului programabil este capabil sã modifice parametrii acestora.
Senzorii şi actuatorii sunt conectati la PLC prin intermediul modului de intrare respective iesire.
PC sau un dispozitiv de programare – Acesta este folosit pentru a realiza programul de control al procesului sau maşinii şi este transferat în memoria automatului programabil.
Display şi unitate de controlAcestea sunt necesare pentru monitorizare şi intervenţie în procesul
sau maşina ce trebuie controlatã.
Fig.7. Pãrţile componente ale automatului programabil ( AP )
- 18 -Modulul de intrareModului de intrare al unui automat programabil permite conectarea
senzorilor.Semnalele de senzori vor ajunge la unitatea centralã de control.Cele mai importante funcţii ale modulului de intrare sunt:
furnizarea tensiunilor de alimentare a circuitelor; protecţia circuitelor electronice la tensiuni mari; eliminarea perturbaţiei semnalului.
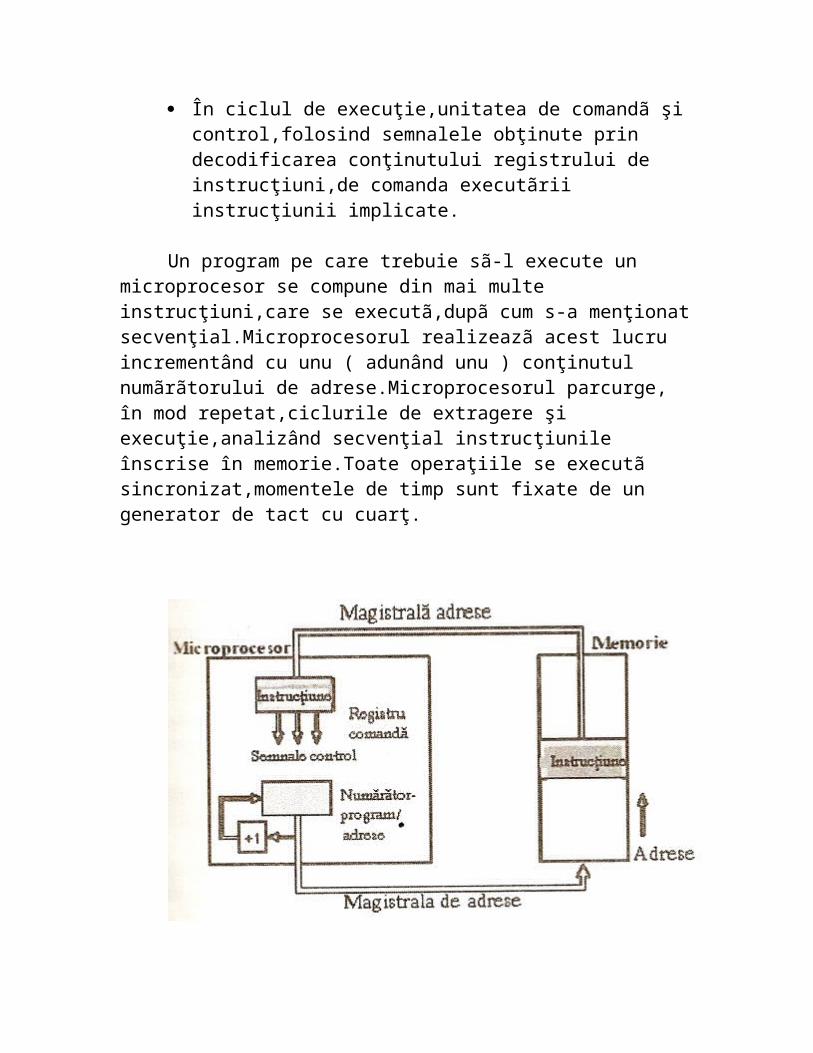
Fig. 8. Încãrcarea unui program în automatul programabil ( PLC )
Optocuplorul transmite informaţia de la senzori cu ajutorul luminii,ceea ce creeazã separarea electricã şi protecţia circuitelor la tensiunile exterioare ( optocuploarele asigurã protecţia pânã la tensiuni de 5 kV ).
Perturbarea semnalului obţinut de la senzori se poate produce prin interferenţe inductive.Este necesar ca semnalul de la senzor sã fie suficient de mult timp aplicat, înainte de a fi recunoscut ca semnal de intrare.Sunt suficiente câteva milisecunde (1-20 milisecunde ) pentru filtrarea impulsurilor de interferenţã.
Fig. 9. Schema bloc a modulului de intrare
- 19 -Modulul de ieşire
Modului de ieşire aplicã semnalele de la unitatea de control la elementele de control final.
Cele mai importante funcţii ale modulului de intrare sunt: furnizarea tensiunilor de alimentare a circuitelor; protecţia circuitelor electronice la tensiuni mari; amplificarea suficientã a semnalului pentru elementele de control
final; protecţia la scurt circuit şi la suprasarcinã.
Fig. 10. Schema bloc a modulului de ieşire dintr-un automat programabil
Schiţa electricã de conectare a intrãrilor şi ieşirilor automatului programabil este prezentatã în figura 6.
S-a luat exemplul unui automat programabil care are 12 intrãri digitale ce formeazã douã grupuri ( datoritã senzorilor care pot fi PNP şi NPN ) de 8,respectiv 4 intrãri. În interiorul automatului programabil toate intrãrile dintr-un grup sunt conectate la un nod comun: S0 pentru primele 8, S1 la ultimele 4.
- intrare tip PNP: nodul comun S0 ( sau S1 ) este conectat la tensiunea de 0 V,iar un senzor de câmp ( limitator,buton etc.) comutã la intrare o tensiune de 24 V;
- intrare de tip NPN: nodul comun S0 ( sau S1 ) este conectat la tensiunea de 24V, iar un senzor de câmp comutã intrarea la potenţialul de masã, 0 V.
Intrãrile de tip PNP s-au notat cu: intrarea 0 cu I0.0; intrarea 1 cu I0.1; intrarea 2 cu I0.2; ş.a.m.d.,iar cele de tip NPN s-au notat cu: intrarea 0 cu I1.0; intrarea 1 cu I1.1; intrarea 2 cu I1.2 ş.a.m.d.
Ieşirile automatului luat în exemplu sunt in numãr de 8.Ieşirile s-au notat cu: ieşirea 0 cu O0.0; ieşirea 1 cu O0.1 ieşirea 2 cu O0.2; ş.a.m.d.
Ca şi la intrãri,existã grupuri de ieşiri care sunt conectate la acelaşi nod.Astfel,existã 3 grupuri: primele 4 ieşiri formeazã primul grup,urmãtoarele 2,al doilea,iar ultimele 2 ieşiri reprezintã cel de-al treilea şi
ultimul grup.Notaţia nodurilor este: C0,C1 si C2. În schema posturilor de lucru,cele trei noduri sunt alimentate din exterior cu 24 V c.c.La comanda de activare a unei ieşiri,releul acesteia se inchide,la borna ieşirii fiind disponibili 24 V.
- 20 -
Fig. 11. Ieşirile şi intrãrile unui automat programabil
Observaţii:- Cele trei noduri C0, C1 şi C2 pot fi alimentate cu tensiuni diferite, în
funcţie de nevoile de comandã ale utilizatorului.De exemplu: C0 cu 12 V c.c.,C1 cu 110 V c.a.,iar C2 cu 220 V c.a.;
- Pentru protecţia la scurtcircuit a releelor de ieşire se pot monta siguranţe fuzibile între sursele de tensiune şi bornele C0, C1 şi C2.Tot pentru protecţia releelor,la sarcini inductive semnificative,se pot monta diode de drum liber în paralel cu fiecare releu.Mãsurile de siguranţã prezentate mai sus au rolul de a prelungi durata de viaţã a automatului programabil,dat fiind faptul cã releele sunt cele mai sensibile piese ce intrã în componenţa acestuia.
- 21 -


![Cursuri de pregãtire tehnicã - ProIDEA · Automate programabile Twido &RG @ $37:' @ WHRUHWLF @ SUDFWLF Obiective &XUVXO SUH]LQW FXQRúWLQ HOH QHFHVDUH SHQWUX @ D SXWHD UHDOL]D vQFDGUDUHD](https://static.fdocumente.com/doc/165x107/5bd448fd09d3f2fa328ba563/cursuri-de-pregatire-tehnica-automate-programabile-twido-rg-37-whruhwlf.jpg)