Modelarea Si Simularea Sistemelor Robotice 2005
395
-
Upload
paunas-madu -
Category
Documents
-
view
679 -
download
7
Transcript of Modelarea Si Simularea Sistemelor Robotice 2005







Modelarea numerică a lanţurilor cinematice deschise folosite
în structurile mecanice ale roboţilor industriali, folosind software aplicativ
1

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
1.1. Concepte de bază O problematică esenţială în construcţia unui robot o reprezintă modelarea
geometriei, a cinematicii şi a dinamicii acestuia. Determinarea acestor modelele stă la baza planificării traiectoriei şi a controlului robotului.
Modelarea geometriei cuprinde două părţi: modelarea geometriei directe şi modelarea geometriei inverse.
Modelarea geometriei directe înseamnă determinarea vectorului de poziţie al punctului caracteristic al robotului (punctul caracteristic = centrul de simetrie al unui obiectului aflat în mâna mecanică) şi a orientării mâinii mecanice, funcţie de coordonatele robot din cuple.
Modelarea geometriei inverse înseamnă determinarea coordonatelor robot din cuple, atunci când se cunoaşte vectorul de poziţie al punctului caracteristic şi orientarea mâinii mecanice.
Modelarea cinematicii cuprinde două părţi: modelarea cinematicii directe şi modelarea cinematicii inverse.
Modelarea cinematicii directe înseamnă determinarea vectorului viteză liniară al punctului caracteristic al robotului şi vectorului viteză unghiulară a mâinii mecanice, funcţie de coordonatele robot şi de vitezele robot din cuple.
Modelarea cinematicii inverse înseamnă determinarea vitezelor robot din cuple, atunci când se cunoaşte vectorul viteză liniară al punctului caracteristic şi vectorul viteză unghiulară al mâinii mecanice.
Studiul dinamicii are două aspecte: modelarea dinamicii şi simularea dinamicii.
Modelarea dinamicii înseamnă determinarea vectorului cuplurilor motoare, cunoscând caracteristicile mecanice şi vectorii coordonatelor, ai vitezelor şi ai acceleraţiilor operaţionale ale robotului, adică stabilirea ecuaţiilor dinamicii.
Simularea dinamicii înseamnă determinarea mişcării structurii mecanice a robotului, cunoscând vectorul momentelor motoare aplicate în cuple.
Pentru determinarea acestor modelele, se foloseşte în literatura de specialitate notaţia Denavit-Hartenberg.
În acest capitol se prezintă un program de calcul simbolic realizat în mediul de calcul şi de programare Mathematica, ce are la bază un algoritm de calcul numeric generalizat, pentru determinarea modelelor mai sus amintite.
1

1. Modelarea matematică a lanţurilor cinematice deschise folosite în structurile
mecanice ale roboţilor industriali, folosind software aplicativ
1.2. Notaţia Denavit-Hartenberg În literatura de specialitate, există două variante ale notaţiei Denavit-
Hartenberg. În cele ce urmează se prezintă varianta a II-a. Se porneşte de la următoarele considerente:
• un robot cu n grade de libertate conţine n elemente şi n cuple;
• baza robotului este elementul 0 şi nu se include în cele n elemente;
• elementul 1 este legat de bază prin cupla 1;
• nu există cuplă la extremitatea ultimului element;
• orice element este caracterizat de lungimea ai a normalei comune la axele
elementului (fig. 1.1) şi unghiul αi dintre axe măsurat într-un plan perpendicular pe
ai; aceşti parametrii se numesc ai → lungimea elementului, αi → unghiul de
răsucire;
• poziţia relativă a două elemente legate la aceeaşi axă, este dată de distanţa di
dintre normalele comune ale axei respective, măsurată în lungul axei cuplei şi
unghiul θi dintre normalele comune măsurat într-un plan normal pe axa cuplei;
aceşti parametri se numesc di → distanţa dintre elemente, respectiv θi → unghiul
dintre elemente;
• orice axă are două normale comune, câte una pentru fiecare element;
• pentru un lanţ cinematic în structura căruia sunt numai cuple de rotaţie originea
sistemului de referinţă {i} se alege la intersecţia normalei comune a axelor i şi i + 1
cu axa cuplei i + 1;
Observaţie: numărul sistemului de referinţă nu coincide cu numărul axei;
2

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
Oi-1 xi-1
diθi
Oi
xi
yi
αi
ai
yi-1
zi
zi-1
axa i axa i + 1axa i - 1 elementul i
elementul i - 1
Fig. 1.1.
• când axele se intersectează, originea sistemului de referinţă se află în punctul
de intersecţie al acestora;
• dacă axele cuplelor sunt paralele originea sistemului {i} se alege astfel încât
pentru următorul element a cărui origine este definită, distanţa di să fie zero;
• axa Oizi a sistemului {i} coincide sau este paralelă cu axa cuplei i + 1;
• axa Oixi coincide sau este paralelă cu normala comună la axele i şi
i + 1, având sensul de la i spre i + 1;
• în cazul în care axele cuplelor se intersectează, axa Oixi este paralelă sau
antiparalelă cu produsul vectorial i1i zz ×− ; această condiţie este îndeplinită pentru
axa Oixi şi în cazul general când aceasta este orientată în lungul normalei comune
la axele cuplelor i şi i+1;
• în cazul unei cuple prismatice, direcţia axei cuplei este definită dar poziţia ei
este nedefinită, lungimea ai nu are sens şi se ia zero (fig. 1.2.);
3

1. Modelarea matematică a lanţurilor cinematice deschise folosite în structurile
mecanice ale roboţilor industriali, folosind software aplicativ
zi
zi-1xi
xi-1
di
Oi-1
Oi
θi
αi
elementul ielementul i - 1
axa iaxa i + 1
axa i - 1
Fig. 1.2. • originea sistemului de coordonate pentru o cuplă prismatică se alege de obicei
astfel încât ea să coincidă cu următoarea origine definită;
• poziţia zero a unei cuple prismatice se realizează atunci când di = 0;
• sensurile pozitive pentru rotaţii şi translaţii, precum şi sensurile axelor Oizi, se
aleg cu manipulatorul în poziţia zero;
• originea sistemului {0} coincide cu originea sistemului de referinţă {1};
• originea sistemului de referinţă {n} al elementului n coincide cu originea
sistemului de referinţă al elementului n-1.
Transformarea între sistemele {i-1} şi {i} se face în următoarea succesiune: • o rotaţie în jurul axei zi-1 de unghi θi (fig. 1.1);
• o translaţie în lungul axei zi-1, cu distanţa di;
• o translaţie în lungul axei xi-1 rotită şi devenită xi, cu distanţa ai;
• o rotaţie în jurul axei xi cu unghiul αi.
4

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
Fiecare transformare este reprezentată printr-o matrice.
[ ] [ ] [ ] [ ]xxrzz1ii RTRT ⋅⋅= +
− (1.1) unde:
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡ −
=
1000010000θcθs00θsθc
R ii
ii
z
; ; [ ]
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=+
1000d1000010a001
Ti
i
xrz
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−
=
10000αcαs00αsαc00001
Rii
iix
.
Efectuând produsul matricelor de mai sus, se obţine:
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−
−
=−
1000dαcαs0θsaαsθcαcθcθsθcaαsθsαcθsθc
Tiii
iiiiiii
iiiiiii
1ii
(1.2)
Pentru a poziţiona mâna mecanică în raport cu sistemul de bază se ataşează fiecărui element al manipulatorului un sistem de referinţă şi se determină matricea de trecere de la fiecare sistem de referinţă la precedentul, [ ]T1i
i− .
Pentru un lanţ cinematic cu n sisteme de referinţă, poziţia sistemului {n} în raport cu sistemul {0} este dată de operatorul:
[ ] [ ] [ ] [ ] [ ]TTTTT 1nn
23
12
01
0n
−= K (1.3) Transformarea (1.3) este funcţie de cele n coordonate robot de poziţie din cuple.
1.3. Modelarea geometriei directe 1.3.1. Algoritmul de calcul
Modelarea are la bază metoda matricelor 4 x 4 în notaţia Denavit-Hartenberg, varianta a II-a, prezentată mai sus şi se adresează structurilor plane şi în spaţiu, formate din lanţuri cinematice deschise ce au în componenţă numai cuple de clasa a V-a.
Algoritmul de calcul este prezentat în Anexa 1. El realizează calculul simbolic al operatorilor omogeni compuşi şi al vectorului de poziţie al punctului
5

1. Modelarea matematică a lanţurilor cinematice deschise folosite în structurile
mecanice ale roboţilor industriali, folosind software aplicativ
caracteristic, P, fapt care permite stabilirea ecuaţiilor necesare în modelarea geometriei inverse, a cinematicii şi a dinamicii. Pe întreg parcursul lucrării elementele manipulatorului sunt considerate corpuri rigide.
Mărimile de intrare pentru algoritm sunt:
• numărul gradelor de libertate ale structurii cinematice;
• valorile parametrilor θ, d, a, α ale tuturor elementelor structurii, sub forma θ[i][t],
d[i][t], a[i], α[i], unde i este elementul curent al manipulatorului, iar t este timpul;
Observaţie: valorile acestor parametri pot fi introduse atât numeric, cât şi literal.
• coordonatele punctului caracteristic, P, în sistemul de referinţă ataşat ultimului
element.
Fixarea sistemelor de referinţă şi stabilirea datelor de intrare se face respectând notaţia Denavit-Hartenberg, varianta a II-a.
Rezultatele pe care le oferă algoritmul:
• operatorii omogeni compuşi ce caracterizează trecerea de la un sistem de referinţă
la precedentul;
• operatorii omogeni compuşi ce caracterizează poziţia şi orientarea fiecărui sistem
de referinţă în raport cu sistemul zero;
• vectorul de poziţie al punctului caracteristic, P, al robotului în raport cu sistemul
zero.
Modelul de calcul permite determinarea vectorului de poziţie al lui P, atât literal cât şi numeric, atribuind valori particulare parametrilor ce apar în expresia vectorului. Opţional se pot determina valorile vectorului de poziţie al lui P, dacă se atribuie valori particulare parametrilor Denavit – Hartenberg.
Relaţiile de calcul folosite de algoritm: Relaţia (1.4) ce descrie matricea de trecere de la un sistem de referinţă
ataşat unui element, la precedentul :
6

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−
−
=−
1000dαcαs0θsaαsθcαcθcθsθcaαsθsαcθsθc
Tiii
iiiiiii
iiiiiii
1ii
(1.4)
Relaţia (1.5) ce exprimă într-un lanţ cinematic cu n sisteme de referinţă poziţia şi orientarea sistemului {n} în raport cu sistemul {0}:
[ ] [ ] [ ] [ ] [ ]TTTTT 1nn
23
12
01
0n
−= K (1.5) Relaţia ce stabileşte vectorul de poziţie al punctului caracteristic P al unui manipulator în raport cu sistemul {0}:
0[rP] = [ ]T0n ⋅ n[rP] (1.6)
Notaţii utilizate în algoritm:
n - numărul gradelor de libertate ale
manipulatorului - robot
teta[i][t],d[i][t],
a[i],alpha[i] - parametrii Denavit - Hartenberg;
t[i, i – 1] - operatorul omogen compus [ ]T1ii
− de trecere de la sistemul
de referinţă {i} la sistemul {i - 1} (caracterizează poziţia şi orientarea sistemului
{i}, faţă de {i - 1});
t[i, 0] - operatorul omogen compus de trecere de la sistemul de referinţă
{i} la sistemul {0};
rP[0] - vectorul de poziţie al lui P în raport cu sistemul {0};
q[i][t] - coordonata robot de poziţie ce se consideră a fi măsurată în
radiani atunci când nu este însoţită de nici o unitate de măsură, respectiv în grade
sexagesimale, atunci când este însoţită de cuvântul Degree;
t - timpul, exprimat în secunde.
Observaţie:
7

1. Modelarea matematică a lanţurilor cinematice deschise folosite în structurile
mecanice ale roboţilor industriali, folosind software aplicativ
O matrice de forma: {{a1, a2, a3, a4},{b1, b2, b3, b4},{c1, c2, c3, c4},{d1, d2, d3, d4}},
trebuie înţeleasă astfel: .
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
4321
4321
4321
4321
ddddccccbbbbaaaa
Programul sursă, realizat în limbajul Mathematica, este prezentat în Anexa1.
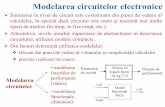
1.3.2. Aplicaţie la manipulatorul plan pentamobil RRRRT Pentru manipulatorul din figura 1.3. se cunosc coordonatele robot din cuple ca funcţii de timp şi lungimile O0O1 = O1O2 = O2O3 = AP = 1 dm. Se cere să se determine modelul geometric direct.
Figura 1.3.
θi di ai αi
Elem. O0O1 i = 1
q1 0 1 0
Elem. O1O2 i = 2
q2 0 1 0
Elem. O2O3 i = 3
q3 0 1 0
Elem. O3Ai = 4
q4 - Pi / 2 0 0 - Pi / 2
Elem. APi = 5
0 1 + q5 1 0
O0
x0
y0
x4
z4
y3
x3
y2
x2
q4q3
x1
q1
q2
y1
O1
A
O3,4O2
z5
q5
P
x5
8

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
Mărimile de intrare pentru algoritm: n=5 Valorile lui teta: q[1][t] q[2][t] q[3][t] -Pi/2+ q[4][t] 0
Valorile lui d: 0 0 0 0 1 + q[5][t]
Valorile lui a: 1 1 1 0 1
Valorile lui alpha: 0 0 0 -Pi 0
Coordonatele punctului caracteristic, P, în ultimul sistem de referinţă : x=0 y=0 z=0 r={{0}, {0}, {0}, {1}} Rezultatele oferite de algoritm se referă la: • matricile de trecere de la un sistem de referinţă la precedentul: t[1, 0] -> {{Cos[q[1][t]], -Sin[q[1][t]], 0, Cos[q[1][t]]},{Sin[q[1][t]], Cos[q[1][t]], 0, Sin[q[1][t]]}, {0, 0, 1, 0}, {0, 0, 0, 1}} t[2, 1] -> {{Cos[q[2][t]], -Sin[q[2][t]], 0, Cos[q[2][t]]},{Sin[q[2][t]], Cos[q[2][t]], 0, Sin[q[2][t]]}, {0, 0, 1, 0}, {0, 0, 0, 1}} t[3, 2] -> {{Cos[q[3][t]], -Sin[q[3][t]], 0, Cos[q[3][t]]},{Sin[q[3][t]], Cos[q[3][t]], 0, Sin[q[3][t]]}, {0, 0, 1, 0},{0, 0, 0, 1}} t[4, 3] -> {{Sin[q[4][t]], 0, Cos[q[4][t]], 0}, {-Cos[q[4][t]], 0, Sin[q[4][t]], 0}, {0, -1, 0, 0},{0, 0, 0, 1}} t[5, 4] -> {{1, 0, 0, 1}, {0, 1, 0, 0}, {0, 0, 1, 1 + q[5][t]}, {0, 0, 0, 1}} Algoritmul oferă şi operatorii omogeni compuşi de tipul [ ]T0
i , care nu au fost prezentaţi, fiind foarte laborioşi. • vectorul de poziţie al punctului caracteristic P, faţă de sistemul fix:
9

1. Modelarea matematică a lanţurilor cinematice deschise folosite în structurile
mecanice ale roboţilor industriali, folosind software aplicativ
rP[0]={{Cos[q[1][t]] + Cos[q[1][t] + q[2][t]] + Cos[q[1][t] + q[2][t] + q[3][t]] + Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] + Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] + Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] q[5][t]}, {-Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] + Sin[q[1][t]] + Sin[q[1][t] + q[2][t]] + Sin[q[1][t] + q[2][t] + q[3][t]] + Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] + Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] q[5][t]}, {0}, {1}} Determinarea vectorului eroare de poziţie şi orientare Algoritmul de calcul permite şi studierea influenţei abaterilor de la valorile nominale ale parametrilor Denavit - Hartenberg asupra erorii de poziţie şi orientare a mâinii mecanice a unui robot. Una dintre cauzele care determină eroarea de poziţie şi orientare o reprezintă abaterile de la valorile impuse ale coordonatelor robot q[i][t], datorate spre exemplu jocurilor din cuple. Vectorul de poziţie al manipulatorului RRRRT din figura 1.3. a fost obţinut cu ajutorul algoritmului şi are expresia prezentată mai sus. Dacă coordonatele robot de poziţie au următoarele valori particulare: {q[1][t] -> 48.56 Degree, q[2][t] -> Pi/5, q[3][t] -> 7.095 Degree, q[4][t] -> -82.75 Degree, q[5][t] -> 2.078}, atunci se obţine vectorul: rP[0]={{3.92345}, {2.23325}, {0}, {1.}} În ipoteza în care q[1][t] ar avea o abatere de 0,1 grade de la valoarea impusă, adică: {q[1][t] -> 48.66 Degree, q[2][t] -> Pi/5, q[3][t] -> 7.095 Degree, q[4][t] -> -82.75 Degree, q[5][t] -> 2.078}, atunci vectorul de pozi[ie care s-ar ob[ine ar fi: rP1[0]= {{3.91955}, {2.24009}, {0}, {1.}} S-ar ob[ine o eroare de pozi[ie a punctului caracteristic egală cu: errP[0]= Abs[rP[0]-rP1[0]]= {{0.00390372},{0.00684431},{0},{0.}} Analog, dacă q[4][t] are o abatere de o miime de grad de la valoarea impusă: {. . ., q[4][t] -> -82.751 Degree, . . .}, atunci rP2[0]={{3.92344}, {2.23319}, {0}, {1.}} iar vectorul eroare este: errP[0]= Abs[rP[0]-rP2[0]]={{8.92754 10-6 },{0.0000557753},{0}, {0.}} O altă cauză a erorii de poziţie o constituie abaterea de la valoarea nominală a parametrilor constanţi Denavit – Hartenberg, exprimaţi funcţie de lungimile elementelor (l1, l2, l3, l4, l5). Dacă aceşti parametri se introduc literal, astfel încât mărimile de intrare sunt: n=5 Parametrii Denavit-Hartenberg:
10

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
Valorile lui teta: q[1][t] q[2][t] q[3][t] -Pi/2 + q[4][t] 0
Valorile lui d: 0 0 0 0 l4+q[5][t]
Valorile lui a: l1l2l30 l5
Valorile lui alpha: 0 0 0 -Pi/2 0
atunci vectorul de poziţie care se obţine este: rP[0]={{l1 Cos[q[1][t]] + l2 Cos[q[1][t] + q[2][t]] + l3 Cos[q[1][t] + q[2][t] + q[3][t]] + l4 Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] + l5 Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] + Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] q[5][t]},{-(l5 Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]]) + l1 Sin[q[1][t]] + l2 Sin[q[1][t] + q[2][t]] + l3 Sin[q[1][t] + q[2][t] + q[3][t]] + l4 Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] + Sin[q[1][t] + q[2][t] + q[3][t] +q[4][t]]q[5][t]}, {0}, {1}} Se calculează vectorul de poziţie pentru următoarele valori particulare: {l1 -> 1, l2 -> 1, l3 -> 1, l4 -> 1, l5 -> 1, q[1][t] -> 48.56 Degree, q[2][t] -> Pi/5, q[3][t] -> 7.095 Degree, q[4][t] -> -82.75 Degree, q[5][t] -> 2.078} şi se obţine: rP[0]= {{3.92345}, {2.23325}, {0}, {1.}} Dacă lungimea l2 are o abatere de 0.1 mm de la valoarea nominală: {. . . , l2 -> 1.001, . . .}, atunci vectorul de pozi[ie şi eroarea de pozi[ie sunt: rP1[0]= {{3.92355}, {2.23424}, {0}, {1.}} errP[0]= Abs[rP[0]-rP1[0]] = {{0.0000948033}, {0.000995496}, {0}, {0.}} În cazul în care lungimea l5 este cu 50 µm mai mare decât valoarea nominală: {. . ., l5 -> 1.0005, . . . }, vectorul eroare de pozi[ie este: errP[0]= Abs[rP[0]-rP2[0]]={{0.0000773983}, {0.000493973}, {0}, {0.}} În mod analog, se poate determina din matricea [ ]T0
5 eroarea de orientare a mâinii mecanice. Obţinerea cu rapiditate a vectorului eroare de poziţie şi orientare permite trasarea cu uşurinţă a curbelor de variaţie a erorii funcţie de abaterile de la valorile nominale ale parametrilor Denavit – Hartenberg, pentru orice structură ce poate fi studiată cu ajutorul algoritmului.
1.4. Modelarea geometriei inverse
1.4.1. Generalităţi
Modelul geometric pentru comandă (modelul geometric invers) [15] constă în determinarea vectorului coordonatelor robot ( )k21 q,,q,q KΘΘ = în funcţie de vectorul coordonatelor operaţionale ( )γ,β,α,z,y,xXX ccc= (coordonatele punctului
11

1. Modelarea matematică a lanţurilor cinematice deschise folosite în structurile
mecanice ale roboţilor industriali, folosind software aplicativ
caracteristic şi unghiurile pentru orientarea efectuorului în raport cu sistemul {0}). În funcţie de coordonatele robot de poziţie se stabilesc deplasările motoarelor şi algoritmii de comandă. Deoarece modelul geometric direct se defineşte prin expresia vectorială:
( )Θƒ=X (1.7)
modelul pentru comandă va avea expresia vectorială:
( )X1−ƒ=Θ (1.8)
Dificultatea constă în faptul că sistemele de ecuaţii (1.7), (1.8), sunt neliniare. După cum este cunoscut, astfel de sisteme se rezolvă prin metode numerice care introduc inevitabil erori. Metodele de rezolvare se împart în două categorii: • metode analitice (aplicabile pe cazuri particulare);
• metode numerice.
Pentru roboţii cu 6 grade de libertate, care au 3 axe consecutive intersectate într-un punct, o metodă analitică de modelare a geometriei inverse o reprezintă metoda Pieper. Soluţia generală pentru rezolvarea sistemului (1.8) este cea numerică, dată fie de metoda dezvoltării în serie Taylor, fie de metoda Newton, fie de metoda Kani. Din cauza naturii iterative a soluţiilor numerice, acestea sunt mult mai lente comparativ cu soluţiile de formă închisă, ceea ce conduce la un consum mai mare de timp. Orice metodă numerică presupune cunoaşterea unei soluţii aproximative de la care se începe procesul de iteraţie existând pericolul ca acest proces să fie divergent. Cu toate aceste dificultăţi, cele mai recente rezultate arat că: toate sistemele mecanice cu cuple de rotaţie şi translaţie având 6 grade de libertate, cu un singur lanţ cinematic, nu sunt solvabile prin metode închise, singurele metode care conduc la soluţii fiind metodele numerice. Poziţia şi orientarea mâinii mecanice a unui robot cu n grade de libertate qi, i = 1, . . ., n în raport cu sistemul de bază {0} este dată de relaţia:
[ ]
( ) ( ) ( ) ( )( ) ( ) ( ) ( )( ) ( ) ( ) ( )
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
1000prrrprrrprrr
T34n33n32n31n
24n23n22n21n
14n13n12n11n
0n
(1.9)
12

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
În matricea de mai sus, primele trei coloane reprezintă cosinuşii directori ai axelor sistemului de referinţă solidari cu mâna mecanică, iar elementele ultimei coloane exprimă poziţia punctului caracteristic. Deoarece pentru poziţionarea ultimului element sunt necesari şase parametri independenţi, se vor alege cele şase elemente subliniate. Se obţine în cazul general (n = 6), şase ecuaţii (în general transcendente) în necunoscutele q1 . . . q6. În cazul în care n<6, adică numărul coordonatelor robot este mai mic decât cel al coordonatelor operaţionale, problema este imposibilă. Adică, cu un număr mai mic al coordonatelor robot este imposibil a determina poziţia şi orientarea mâinii mecanice. 1.4.2. Metoda Newton de calcul numeric iterativ Una dintre metodele numerice care permite determinarea unei soluţii aproximative a sistemului (1.7) este metoda Newton. Dezvoltat, sistemul (1.7) se scrie sub forma:
( )( )
( ) ⎪⎪⎭
⎪⎪⎬
⎫
=ƒ
=ƒ=ƒ
0q,,q,q
0q,,q,q0q,,q,q
k21k
k212
k211
K
M
K
K
(1.10)
Considerând coordonatele robot de poziţie componente ale unui vector k-dimensional.
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
k
2
1
q
MΘ
(1.11)
şi funcţiile, ƒ1, ƒ2, …, ƒk, componente ale unei funcţii vectoriale cu dimensiunea k
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
ƒ
ƒƒ
=ƒ
k
2
1
M
(1.12)
atunci sistemul (1.10) se poate scrie : ( )[ ] 0=ƒ Θ (1.13)
Fie o soluţie p a sistemului:
[ ]⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
=
)p(k
)p(2
)p(1
)p(
q
MΘ
(1.14)
Aceasta va reprezenta o valoare aproximativă a soluţiei exacte. Soluţia exactă este:
13

1. Modelarea matematică a lanţurilor cinematice deschise folosite în structurile
mecanice ale roboţilor industriali, folosind software aplicativ
[ ] ( )[ ] ( )[ ]pp ε+= ΘΘ (1.15)
unde:
[ ]⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
=
)p(k
)p(2
)p(1
)p(
ε
εε
εM
(1.16)
Dacă se dezvoltă după puterile vectorului mic ( )pε şi se reţin termenii liniari, se obţine:
( )[ ] ( )[ ]( )[ ] ( )[ ]( )[ ] ( )[ ]( )[ ] ( )[ ] 0ε'ε ppppp =ƒ+ƒ=+ƒ ΘΘΘ (1.17) unde:
( )[ ] ( )[ ]ΘΘ J' =ƒ (1.18) este matricea Jacobi, dată de relaţia:
( )[ ]
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
k
k
2
k
1
k
k
2
2
2
1
2k
1
2
1
1
1
qf
qf
qf
qf
qf
qf
qf
qf
qf
J
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
L
MMM
L
L
Θ
(1.19)
Înlocuind (1.18) în (1.17), rezultă:
( )[ ]( )[ ] ( )[ ]( )[ ] ( )[ ] 0εJ ppp =+ƒ ΘΘ (1.20) Dacă matricea ( )[ ]( )[ ]pJ Θ are determinantul nenul, atunci se poate scrie:
( )[ ] ( )[ ]( )[ ] ( )[ ]( )[ ]p1pp Jε ΘΘ ƒ−=− (1.21)
Înlocuind (1.21) în (1.15), se obţine:
( )[ ] ( )[ ] ( )[ ]( )[ ] ( )[ ]( )[ ]P1Pp1p J ΘΘΘΘ ƒ−=−+ ; (p = 0, 1, 2, … ) (1.22)
Expresia (1.22) reprezintă metoda Newton pentru iteraţiile
p = 0, 1, 2, … . Iteraţia se opreşte atunci când, înlocuind soluţia aproximativă găsită în sistemul (1.13), se obţine o eroare mai mică de 10-3.
14

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
1.4.3. Mobilitate – manevrabilitate Mobilitatea unui mecanism se defineşte prin numărul parametrilor geometrico-cinematici independenţi necesari pentru controlul mişcării tuturor elementelor cinematice distincte. Manevrabilitatea este specifică mecanismelor-manipulatoare cu lanţ cinematic deschis, când mobilitatea se calculează cu formula:
543215
1ll C5C4C3C2ClCM ++++== ∑
=
(1.23)
unde l este numărul de mişcări independente permise de cuplă, iar Cl este numărul de cuple ce permit l mişcări independente. În situaţia în care, prin fixarea unui punct al ultimului element cinematic, se vor anula trei grade de libertate, se obţine o nouă mobilitate a lanţului cinematic (devenit închis). Această mobilitate reziduală, este denumită manevrabilitate sau redundanţă, fiind calculată cu formula:
3lC3M*M5
1ll −=−= ∑
=
(1.24)
Dacă se fixează elementul cinematic final al lanţului, se vor anula şase grade de libertate astfel că formula de calcul a manevrabilităţii este: . 6lC*M
5
1ll −= ∑
=
1.4.4. Algoritmul de calcul
Lucrarea de faţă vine în completarea lucrării [PaulPopescu] şi utilizează metoda Newton de calcul numeric iterativ nu numai pentru determinarea modelului geometric invers al structurilor robotizate cu şase grade de libertate ce deservesc spaţiul, dar şi pentru modelarea structurilor plane redundante, situaţie în care numărul ecuaţiilor este mai mic decât cel al necunoscutelor din sistemul (1.7). Modelul de calcul este prezentat în Anexa 2 şi se adresează structurilor plane sau în spaţiu, cu cel mult 6 grade de libertate, formate din lanţuri cinematice deschise ce au în componenţă numai cuple de clasa a V-a. Spre deosebire de alte modele de calcul, rapiditatea modelării structurilor redundante îi conferă o importanţă deosebită. Astfel de structuri sunt de mare interes în robotica actuală, ele deservind cu precizie locuri greu accesibile. Pentru limitarea numărului de soluţii, în calculul geometro-cinematic invers al manipulatoarelor redundante, se introduc restricţii privind spaţiul de lucru al robotului, sau alte constrângeri. Mărimile de intrare pentru algoritm: • operatorul omogen compus ce caracterizează poziţia şi orientarea sistemului de referinţă ataşat punctului caracteristic, P, în raport cu sistemul zero;
15

1. Modelarea matematică a lanţurilor cinematice deschise folosite în structurile
mecanice ale roboţilor industriali, folosind software aplicativ
• soluţia aproximativă de la care să înceapă calculul iterativ; • vectorul eroare admisibilă de poziţie şi orientare a efectuorului. Aceste date respectă notaţia Denavit-Hartenberg, varianta a II-a. Rezultatele pe care la oferă algoritmul: • valorile coordonatelor robot ce satisfac configuraţia impusă; • poziţia şi orientarea efectuorului pentru fiecare soluţie obţinută; • vectorul eroare de poziţie şi orientare a efectuorului pentru fiecare soluţie obţinută. Relaţiile de calcul folosite de algoritm: Ecuaţia matriceală
[ ] [ ]impus0n
0n TT = (1.25)
şi, eventual, alte ecuaţii ce provin din restricţiile geometrice ale spaţiului de lucru al robotului sau din alte constrângeri. Notaţii utilizate în algoritm:
Timpus[n, 0] - operatorul omogen compus ce exprimă poziţia şi orientarea sistemului de referinţă {n} faţă de sistemul {0}, însemnând configuraţie impusă; Observaţii:
Calitatea soluţiilor obţinute este direct influenţată de soluţiile aproximative impuse ca valori de start în calculul iterativ. De aceea algoritmul a fost conceput astfel încât să primească o soluţie aproximativă iniţială şi un pas cu care să determine singur soluţiile aproximative următoare. Pasul se va impune de către utilizator, iar valoarea acestuia va fi dată iniţial 1, după care, în urma rulării programului, dacă soluţiile exacte obţinute nu satisfac eroarea admisibilă de poziţie şi orientare impusă, pasul va fi micşorat corespunzător, ajungând la valori de 10-5, 10-6. Fineţea acestui pas influenţează în egală măsură numărul de soluţii exacte obţinute ce satisfac eroarea impusă, deoarece pentru fiecare soluţie aproximativă, prin calcul iterativ se determină soluţia exactă. Programul este interactiv şi prezintă sintaxa în care trebuiesc introduse datele. Din numărul de soluţii ce satisfac ecuaţia
], programul realizează o selecţie dacă utilizatorul mai impune şi alte
ecuaţii. Numărul total de ecuaţii nu trebuie să depăţească numărul de necunoscute, în schimb, poate fi mai mic, dacă nu, egal. În cazul în care numărul de ecuaţii este mai mic decât numărul de necunoscute (aşa cum se întâmplă adesea la manipulatoarele-robot redundante, când se impune doar poziţia şi orientarea mâinii mecanice), atunci una sau mai multe ecuaţii se vor introduce de două ori, astfel ca, formal, numărul de ecuaţii să fie egal cu numărul de necunoscute. Numărul de
[ ] [ impus0n
0n TT =
16

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
soluţii care se pot obţine este în acest caz infinit. Dacă utilizatorul nu doreşte să introducă ecuaţii de constrângere, atunci el poate să obţină soluţii exacte într-un anume câmp de valori, pe care îl indică prin soluţiile aproximative oferite algoritmului ca date de intrare. Programul sursă, realizat în limbajul Mahematica, este prezentat în Anexa2. 1.4.5. Aplicaţie la manipulatorul plan pentalater RRRRT Manipulatorului din figura 1.3., pentru care s-a determinat modelul geometric direct în capitolul I, i se impune poziţia şi orientarea efectuorului prin ecuaţiile {p11 = 0.5, p13 = 0.866025, p14 = 4.4, p24 = 2}, unde pij este elementul aflat la intersecţia
liniei i cu coloana j în matricea [ ]T05 , determinată cu programul pentru modelarea
geometriei directe. Se cere să se determine modelul geometric invers. Mod de lucru: Se utilizează programul pentru modelarea geometriei directe şi se determină: t[5, 0] -> {{Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]], 0, Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]], Cos[q[1][t]] + Cos[q[1][t] + q[2][t]] + Cos[q[1][t] + q[2][t] + q[3][t]] + Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] + Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] + Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] q[5][t]}, {-Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]], 0, Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]], -Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] + Sin[q[1][t]] + Sin[q[1][t] + q[2][t]] + Sin[q[1][t] + q[2][t] + q[3][t]] + Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] + Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] q[5][t]},{0, -1, 0, 0}, {0, 0, 0, 1}} Se lansează în execuţie programul pentru modelarea geometriei inverse şi se obţin soluţiile:
17

1. Modelarea matematică a lanţurilor cinematice deschise folosite în structurile
mecanice ale roboţilor industriali, folosind software aplicativ
Poziţia 1 Poziţia 2 Poziţia 1 {q[1][t] -> 6.04258, q[2][t] -> 7.39207, q[3][t] -> -29.7079, q[4][t] -> 16.7968, q[5][t] -> 2.61266} Poziţia 2 {q[1][t] -> 0.126611, q[2][t] -> 0.553215, q[3][t] -> 0.0854166, q[4][t] -> -0.241642, q[5][t] -> 0.740122} Poziţia 3 {q[1][t] -> 0.106141, q[2][t] -> 0.663729, q[3][t] -> -0.0746609, q[4][t] -> -0.171609, q[5][t] -> 0.746188}
18

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
Poziţia 3 Poziţia 4 Poziţia 5 Poziţia 4 {q[1][t] -> 0.977998, q[2][t] -> -0.685747, q[3][t] -> 0.00943441, q[4][t] -> 0.221915, q[5][t] -> 0.758029} Poziţia 5 {q[1][t] -> 0.318339, q[2][t] -> -0.0281403, q[3][t] -> 0.672063, q[4][t] -> -0.438663, q[5][t] -> 0.748293}
1.5. Modelarea cinematicii directe
1.5.1. Algoritmul de calcul Modelarea cinematicii directe înseamnă determinarea vectorului viteză liniară
al punctului caracteristic al robotului şi vectorului viteză unghiulară a mâinii mecanice, funcţie de coordonatele robot şi de vitezele robot din cuple.
Algoritmul de calcul este prezentat în Anexa 3 şi are la bază relaţia de derivare în raport cu timpul a vectorului de poziţie al punctului caracteristic al robotului. El se adresează structurilor formate din lanţuri cinematice deschise ce au
19

1. Modelarea matematică a lanţurilor cinematice deschise folosite în structurile
mecanice ale roboţilor industriali, folosind software aplicativ
în componenţă numai cuple de clasa a V-a şi are proprietatea de a realiza calculul simbolic al vectorilor viteză şi acceleraţie liniară ai punctului caracteristic şi al vectorilor viteză şi acceleraţie unghiulară ai mâinii mecanice. Determinarea acestor vectori ca funcţii de vitezele din cuple permite studiul influenţei parametrilor Denavit - Hartenberg şi ai vitezelor şi acceleraţiilor generalizate asupra vectorilor viteză şi acceleraţie mai sus amintiţi. Observaţie: Înainte de determinarea modelului cinematic direct este obligatorie determinarea modelului geometric direct. Mărimile de intrare pentru algoritm: • parametrii Denavit - Hartenberg; Rezultatele pe care la oferă algoritmul: • viteza liniară şi acceleraţia liniară ale punctului caracteristic (ce aparţine ultimului element al robotului), exprimată prin proiecţiile lor pe axele sistemului fix; • viteza unghiulară şi acceleraţia unghiulară ale ultimului element al robotului, exprimate prin proiecţiile lor pe axele sistemului fix; • opţional: - valorile vitezei şi acceleraţiei liniare şi ale vitezei şi acceleraţiei unghiulare mai sus amintite, pentru valori particulare atribuite poziţiilor din cuple. Relaţiile de calcul folosite de algoritm:
[ ] [ ]PP rv &00 = (1.26) care reprezintă relaţia de derivare în raport cu timpul a vectorului de poziţie al punctului caracteristic P, pentru determinarea vitezei liniare;
[ ] [ ] [ ]Tnn RRS 00 &= (1.27) care reprezintă relaţia prin care se calculează matricea [S] = matricea vitezei unghiulare,
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
−=
00
0
xy
xz
yz
Sωω
ωωωω
(1.28)
care reprezintă structura matricei vitezei unghiulare şi permite identificarea proiecţiilor pe axe ale vitezei.
20

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
În relaţiile de mai sus, reprezintă matricea ce caracterizează orientarea sistemului {n}
faţă de sistemul {0}, iar şi
[ ]Rn0
[ ]Rn&0 [ ]Tn R0 derivata respectiv transpusa ei.
De asemenea, algoritmul de calcul foloseşte relaţia de derivare în raport cu timpul a vectorului viteză liniară a punctului caracteristic, P, pentru determinarea acceleraţiei liniare:
[ ] [ ]PP va &00 = (1.29) relaţia de derivare în raport cu timpul a vectorului viteză unghiulară a efectuorului pentru determinarea acceleraţiei unghiulare;
[ ] [ ]PP w&00 =ε (1.30)
Notaţii utilizate în algoritm: vP[0] - viteza liniară a punctului caracteristic P în raport cu sistemul de referinţă{0}; wP[0] - viteza unghiulară a efectuorului în raport cu sistemul de referinţă{0}. aP[0] - acceleraţia liniară a punctului caracteristic P în raport cu sistemul de referinţă{0}; EP[0] - acceleraţia unghiulară a efectuorului în raport cu sistemul de referinţă{0}. 1.5.2. Aplicaţie la manipulatorul plan pentalater RRRRT
Pentru manipulatorul din figura 1.3. se cunosc coordonatele robot de poziţie şi vitezele robot. Se cere să se determine viteza şi acceleraţia liniară ale punctului caracteristic şi viteza şi acceleraţia unghiulară ale mâinii mecanice. Mod de lucru: Se determină modelul geometric direct cu ajutorul algoritmului din Anexa 1. Se lansează în execuţie programul pentru modelarea cinematicii directe, cu ajutorul căruia se determină vP[0],wP[0],aP[0],EP[0]. Deoarece expresiile vectorilor acceleraţie sunt foarte laborioase, s-a prezentat aici doar expresiile vectorilor viteză obţinuţi: vP[0]= {{(l5 Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] - l1 Sin[q[1][t]] - l2 Sin[q[1][t] + q[2][t]] - l3 Sin[q[1][t] + q[2][t] + q[3][t]] - l4 Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] - Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] q[5][t]) (q[1])'[t] + (l5 Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] - l2 Sin[q[1][t] + q[2][t]] - l3 Sin[q[1][t] + q[2][t] + q[3][t]] - l4 Sin[q[1][t] + q[2][t] + q[3][t] +
21

1. Modelarea matematică a lanţurilor cinematice deschise folosite în structurile
mecanice ale roboţilor industriali, folosind software aplicativ
q[4][t]] – Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] q[5][t]) (q[2])'[t] + (l5 Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] - l3 Sin[q[1][t] + q[2][t] + q[3][t]] - l4 Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] - Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] q[5][t]) (q[3])'[t] +(l5 Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] - l4 Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] - Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] q[5][t]) (q[4])'[t] + Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] (q[5])'[t]}, {(l1 Cos[q[1][t]] + l2 Cos[q[1][t] + q[2][t]] + l3 Cos[q[1][t] + q[2][t] + q[3][t]] + l4 Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] + l5 Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] + Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] q[5][t]) (q[1])'[t] +(l2 Cos[q[1][t] + q[2][t]] + l3 Cos[q[1][t] + q[2][t] + q[3][t]] + l4 Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] + l5 Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] + Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] q[5][t]) (q[2])'[t] + (l3 Cos[q[1][t] + q[2][t] + q[3][t]] + l4 Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] + l5 Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] + Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] q[5][t]) (q[3])'[t] + (l4 Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] + l5 Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] + Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] q[5][t]) (q[4])'[t] + Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] (q[5])'[t]}, {0}} wP[0]={{0}, {0}, {(q[1])'[t] + (q[2])'[t] + (q[3])'[t] + (q[4])'[t]}} Eroarea de viteze şi acceleraţii datorată abaterilor de la valorile nominale ale coordonatelor robot
Algoritmul permite determinarea cu rapiditate a erorii de cinematică a mâinii mecanice, datorată abaterilor de la valorile nominale ale coordonatelor robot de poziţie, ale vitezelor robot şi ale acceleraţiilor robot.
În ipoteza că lungimile laturilor sunt: {l1 -> 1, l2 -> 1, l3 -> 1, l4 -> 1,l5 -> 1} atunci pentru următoarele valori ale poziţiilor, ale vitezelor şi ale acceleraţiilor robot:{q[1][t] -> 34 Degree, q[2][t] -> Pi/7, q[3][t] -> 0.1, q[4][t] -> Pi/2, q[5][t] -> 0.5, (q[1])'[t] -> 0.9, (q[2])'[t] -> 0.78, (q[3])'[t] -> 1.1, (q[4])'[t] -> 1.3, (q[5])'[t] -> 0.4, (q[1])''[t] -> 0.25, (q[2])''[t] -> 0.6, (q[3])''[t] -> 1, (q[4])''[t] -> 1, (q[5])''[t] -> 0.2} se obţin vectorii: vP[0]={{-11.1007}, {-0.955951}, {0}} wP[0]={{0}, {0}, {4.08}} aP[0]={{2.02283}, {-39.6222}, {0}} EP[0]={{0}, {0}, {2.85}} Dacă, spre exemplu, q[1][t] are o abatere de o miime de grad şi restul rămân neschimbate:
22

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
{q[1][t] -> 34.001 Degree, . . . }, vectorii viteze şi acceleraţii care se obţin sunt: vP1[0]={{-11.1007}, {-0.956145}, {0}} wP1[0]={{0}, {0}, {4.08}} aP1[0]={{2.02352}, {-39.6221}, {0}} EP1[0]={{0}, {0}, {2.85}} iar vectorii eroare: errvP[0]= Abs[vP[0]-vP1[0]]={{0.0000166862}, {0.000193744}, {0}} errwP[0]= Abs[wP[0]-wP1[0]]={{0}, {0}, {0.}} erraP[0]= Abs[aP[0]-aP1[0]]={{0.000691537}, {0.0000353111}, {0}} errEP[0]= Abs[EP[0]-EP1[0]]={{0}, {0}, {0.}} Dacă viteza robot (q[4])’[t] are o abatere de 2 sutimi rad/s de la valoarea nominală şi restul rămân neschimbate: { . . ., (q[4])'[t] -> 1.32, . . .} se obţine: vP2[0]={{-11.1314}, {-0.974926}, {0}} wP2[0]={{0}, {0}, {4.1}} aP2[0]={{2.17139}, {-39.8875}, {0}} EP2[0]={{0}, {0}, {2.85}} Iar erorile sunt: errvP[0]= Abs[vP[0]-vP2[0]]={0.0306586}, {0.0189749}, {0}} errwP[0]= Abs[wP[0]-wP2[0]]={{0}, {0}, {0.02}} erraP[0]= Abs[aP[0]-aP2[0]]={{0.148566}, {0.26534}, {0}} errEP[0]= Abs[EP[0]-EP2[0]]={{0}, {0}, {0.}}
1.6. Modelarea cinematicii inverse
1.6.1. Generalităţi
Modelul cinematic direct se poate scrie [16]: [ ] ( )[ ][ ]∆ΘΘ=∆ JX sau [ ] ( )[ ][ ]ΘΘ= && JX (1.31)
în care [X] este vectorul coordonatelor operaţionale, iar [Θ] este vectorul coordonatelor robot.
Conoscând fie vectorul [X], fie [ ]X& , fie [∆X] nivelul de comandă trebuie să calculeze
valorile vectorilor [Θ], [ ]Θ& sau [∆Θ], ceea ce înseamnă determinarea modelului cinematic invers.
[ ] ( )[ ] [ ]XJ ∆Θ=∆Θ −1 (1.32) Ecuaţia (1.32) exprimă doar creşterile variabilelor din cuple. Este necesar să se cunoască valorile iniţiale ale variabilelor. De aceea se porneşte întotdeauna de la o configuraţie cunoscută, numită de iniţializare, pentru care [0X] a fost măsurat sau calculat
23

1. Modelarea matematică a lanţurilor cinematice deschise folosite în structurile
mecanice ale roboţilor industriali, folosind software aplicativ
p r-un mod oarecare, sau se foloseşte în completarea modelului cinematic, modelul geometric direct ca 0
rintre dă [ X] şi se măsoară valorile variabilelor din articulaţii.
mai mare decât cel al orientarea
) nul coordonatelor robot este mai mic decât cel al coordonatelor operaţionale.
ipuri de t
se, Gauss, Jordan - Gauss, etc.);
soluţie sau nu poate fi găsită o olu
ac
) are o soluţie unică dacă, şi numai dacă, determinantul matricei Jacobi
Sistemul (1.32) este un sistem liniar în necunoscutele [∆Θ]. Matematic vorbind, se pot întâlni trei cazuri: a) numărul gradelor de libertate (al coordonatelor robot) este coordonatelor operaţionale (parametrii independenţi ce descriu poziţia şi efectuorului). Sistemul mecanic în acest caz se numeşte redundant. b mărul coordonatelor robot este egal cu numărul coordonatelor operaţionale. c) număru Pentu rezolvarea sistemelor de ecuaţii liniare şi neomogene se utilizează două tme ode: • metode exacte (Cramer, Metoda Matricei inver
• metode iterative (Jacobi, Gauss - Seidel, etc.)
Metodele exacte dau o soluţie exactă sistemului folosind un număr finit de operaţii elementare. Metodele iterative dau o soluţie a sistemului care se obţine ca limită a unui şir de vectori ce reprezintă soluţia pentru diferite iteraţii. În cadrul acestor metode se pune problema alegerii metodei celei mai convenabile din punct de vedere al unei viteze sporite de convergenţă pentru a stabili aproximarea iniţială adecvată. Există numeroase sisteme dependente de natura coeficienţilor pentru care nu existăs ţie cu un anume grad de precizie. Există, de asemenea, sisteme pentru care o soluţieex tă a sistemului este practic imposibil a fi determinată. La analiza modelului cinematic pentru comandă se foloseşte metoda matricei inverse. Sistemul (4.2(Jacobianul) este diferit de zero (det [J(θ)] ≠ 0)), ceea ce înseamnă că matricea respectivă este nesingulară. Dacă [J(Θ)] este singulară, sistemul (1.32) va avea o soluţie numai pentru anumite valori speciale ale vectorului X∆ şi această soluţie nu este unică. În lucrarea [Paul Popescu] sunt prezentate câteva metode de inversare a matricei Jacobi în cazul în care aceasta nu este pătratică: metoda variabilelor principale, criteriul
uadratic, metoda inversei generalizate, metoda determinării pseudoinversei prin algoritmul
Dacă numărul de parametri independenţi ce descriu poziţia şi orientarea mâinii mecanice este p, iar numărul gradelor de libertate ale robotului este n, matricea Jacobi se
qGrèville. Metoda variabilelor principale de inversare a matricei Jacobi
24

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
scrie: ( )[ ] ⎥⎥⎥⎥
⎢⎢⎢
=Θ n
n
qf
qf
qf
qqq
J ∂∂
∂∂
∂∂
∂∂∂
L 2
2
2
1
2
21
(1.33)
⎥⎥⎥
⎦⎢⎢⎢
⎣ n
ppp
qf
qf
qf
∂∂
∂∂
∂∂
L
MMM
21
Pentru a putea calcula determinantul matricei J, trebuie ca matricea să fie pătrată. Acest lucru se întâmplă foarte rar în practică.
Dacă matricea J nu este pătrată, dar este îndeplinită cond
⎥⎢
L
iţia p < n, atunci se foloseşte a ncipale, considerând variaţiile unora din variabile ∆θ1,
∆θ2 t să se obţină o matrice pătratică pentru a permite inveDeo
drept obiectiv dete inarea vitezelor generalizate din cuple, atunci când se impune viteza liniară a punctului caracteristic şi viteza unghiulară a ultimului element al robotului,
l fix. Algoritmul se adresează atât structurilor eredundante, cât şi celor redundante. Pentru acest din urmă caz, în vederea
, algoritmul are la bază metoda
mbolic al vitezelor din cuple, ca funcţii de vitezele
ră a punctului caracteristic, exprimată prin proiecţiile sale pe axele stemului de referinţă fix;
ă a ultimului element (dacă numărul de necunoscute este mai are decât numărul de ecuaţii până în acest moment), dată prin proiecţiile sale pe
⎤⎢⎡ fff ∂∂∂ 111
aş numita metodă a variabilelor pri
etc. ca fiind nule, astfel încârsarea. arece nu există o metodă care să precizeze care dintre variabile este mai bine să fie
considerată a fi nulă, se folosesc diverse criterii de optimizare cu ajutorul cărora se găseşte o valoare optimă pentru variabile. Aceasta înseamnă creşterea dimensiunii lui J în loc de micşorarea ei prin neglijarea întâmplătoare a creşterii unei variabile. Astfel, se adaugă sistemului ecuaţii de constrângere care reprezintă un criteriu de optimizare. Între acestea se va găsi o valoare optimă pentru variabilele ∆θ1, ∆θ2, …, ∆θi.
1.6.2. Algoritmul de calcul Algoritmul de calcul este prezentat în Anexa 4. El are rm
ambele exprimate în raport cu sistemuninversării matricei Jacobi, care nu este pătraticăvariabilelor principale prezentată mai sus. Spre deosebire de alte metode, prezenta metodă realizează calculul siimpuse mâinii mecanice. Se permite astfel studiul influenţei fiecărei componente a vectorilor viteză impuşi asupra vitezei din fiecare grad de libertate.
Mărimile de intrare pentru algoritm: • datele de intrare de la modelul geometric direct; • viteza liniasi• viteza unghiularm
25

1. Modelarea matematică a lanţurilor cinematice deschise folosite în structurile
mecanice ale roboţilor industriali, folosind software aplicativ
axele sistemului de referinţă fix; dacă numărul n de necunoscute este încă mai mare ecât numărul p de ecuaţii, atunci fie se vor adăuga ecuaţii de constrângere, fie se
metri de calcul, numărul acestora
ste viteze, reprezintă date de intrare ce se pot da atât numeric, ât şi literal.
oferă algoritmul: • valorile vitezei generalizate din fiecare cuplă; opţional: - valorile vitezei din fiecare cuplă, pentru
il
ordinul I, în
dvor considera anumite viteze robot drept parafiind egal cu diferenţa între numărul de necunoscute şi numărul de ecuaţii. Observaţie: toate acec Rezultatele pe care la
valori particulare atribuite poziţiilor din cuple. Relaţi e de calcul folosite de algoritm: •
Programul rezolvă un sistem de ecuaţii liniare neomogene denecunoscutele qi’(t):
[ ] [ ]impusPP vv 00 = (1.34)
[ ] [ ]impusPP ww 00 = (1.35)
Notaţii utilizate în algoritm: q[i][t] - viteza corespunzătoare coordonatei qi(t).
alte
t] +
1.6.3. Aplicaţie la manipulatorul plan pentamobil RRRRT
Pentru manipulatorul prezentat în figura 1.3. se cere să se determine modelul cinematic invers, dacă se dau 0vPx = vx, 0vPy = vy, 0wPz = wz. Nu se impun constrângeri, ci se iau ca parametri de lucru viteza din cupla a patra (v4) şi pe cea din cupla a cincea (v5). Se obţin următoarele rezultate: {(q[5])'[t] -> v[5][t], (q[4])'[t] -> v[4][t], (q[3])'[t] -> wz - 1. v[4][t] + Sec[q[1][t] + q[2][t]] (-vy +(Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] + Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] + Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] q[5][t]) v[4][t] - (Cos[q[1][t] + q[2][t] + q[3][t]] + Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] + Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] + Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] q[5][t])(-wz + v[4][t]) + Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] v[5][t]) + (Cos[q[1][t] + q[2][t]] (-1. vx + (Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] - 1. Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] - 1. Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] q[5][t]) v[4][t] - (Cos[q[1][t] + q[2][
26

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
q[3][t] + q[4][t]] - 1. Sin[q[1][t] + q[2][t] + q[3][t]] - Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] - Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] q[5][t]) (- wz + v[4][t]) + Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] v[5][t]) + Sin[q[1][t] + q[2][t]](- vy +
+
q[3][t] +
3][t]] - Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] - Sin[q[1][t] + q[2][t] + [2][t] + q[3][t] + q[4][t]]
q[4][t]] + [q[1][t] + q[2][t] + q[3][t] + q[4][t]]
[5][t]) v[4][t] - (Cos[q[1][t] + q[2][t] + q[3][t]] + Cos[q[1][t] + q[2][t] + q[3][t] + [3][t] +
][t]) (wz + v[4][t]) + Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] v[5][t]))) Cos[q[1][t] + q[2][t]] Sin[q[1][t]] + Cos[q[1][t]] Sin[q[1][t] + q[2][t]]),
laborioase, expresiile celorlalte viteze robot nu s-au mai rezentat.
Vit > 2.65} secunde sunt:
tului cunoscând vectorul i.
Stanford cu şase grade de libertate. Datorită derivatelor pe care le includ, relaţiile de calcul care stau la bazamanipulatoare robot cu număr mare de grade de libertate sunt foarte ample. În
(Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] + Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] + Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] q[5][t]) v[4][t] - (Cos[q[1][t] + q[2][t] + q[3][t]] + Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] + Sin[q[1][t] + q[2][t] + q[3][t] q[4][t]] + Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] q[5][t])(-1. wz + v[4][t]) + Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] v[5][t])) (Cos[q[1][t] + q[2][t]] Sin[q[1][t]]+ Cos[q[1][t]] Sin[q[1][t] + q[2][t]]) - ((Cos[q[1][t]] + Cos[q[1][t] + q[2][t]]) Sec[q[1][t] + q[2][t]] (Cos[q[1][t] + q[2][t]] (vx + (Cos[q[1][t] + q[2][t] + q[3][t] +q[4][t]] - Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] - Sin[q[1][t] + q[2][t] +q[4][t]]q[5][t]) v[4][t] - (Cos[q[1][t] + q[2][t] + q[3][t] + q[4][t]] -Sin[q[1][t] + q[2][t] + q[q[3][t] + q[4][t]] q[5][t]) (- wz + v[4][t]) + Cos[q[1][t] + qv[5][t]) + Sin[q[1][t] + q[2][t]] (vy + (Cos[q[1][t] + q[2][t] + q[3][t] +Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] + Cosqq[4][t]] + Sin[q[1][t] + q[2][t] + q[3][t] + q[4][t]] + Cos[q[1][t] + q[2][t] + qq[4][t]] q[5(Deoarece sunt foartep
ezele robot la momentul {t -{{(q[5])'[2.65]->0.20, (q[4])'[2.65]->-0.10, (q[3])'[2.65]->-6.18215, (q[2])'[2.65] -> 1.10, (q[1])'[2.65] -> 2.56}} 1.7. Modelarea dinamicii folosind formalismul Lagrange. Calcul simbolic 1.7.1. Generalităţi
Studiul dinamicii revine la: • determinarea vectorului cuplurilor motoare cunoscând caracteristicile mecanice şi vectorii coordonatelor, ai vitezelor şi ai acceleraţiilor operaţionale ale robotului, adică stabilirea ecuaţiilor dinamicii; • determinarea mişcării structurii mecanice a robomomentelor motoare aplicate în cuple, adică simularea dinamici În lucrarea [17] este aplicat formalismul Lagrange pentru determinarea modelului dinamic al unui manipulator plan cu două grade de libertate RR şi al manipulatorului spaţial
formalismului Lagrange pentru
27

1. Modelarea matematică a lanţurilor cinematice deschise folosite în structurile
mecanice ale roboţilor industriali, folosind software aplicativ
vederea evitării acestui neajuns, în lucrarea mai sus amintită se fac aproximări la determinarea inerţiilor din cuple, iar derivarea unei matrici esteînlocuită prin produsul dintre acea matrice şi operatorul diferenţial ∆. Formalismul Lagrange pentru stabilirea ecuaţiilor mişcăr Dacă r0 - reprezintă vectorul de poziţie al unui punct aflat pe elementul iîn
ii
[ ] [ ]( ) [ ]iii
jj
j
ii rqqT
dtrd
⎟⎟⎠
⎞⎜⎜⎝
⎛= ∑
=1
00
&∂
∂
[ ]iraport cu sistemul {0},
[ ] [ ] [ ]iiii rTr 00 = (1.36)
atunci viteza acestui punct, exprimată prin componentele sale pe axele sistemului fix este
Pătratul vitezei se calculează cu relaţia:
(1.37)
[ ] [ ] [ ] [ ] [ ]
[ ]( )⎡ ⎛ii T0∂ [ ] [ ]( ) [ ]
[ ]( ) ⎤
⎥⎦⎢ ⎟⎠
⎜⎝
∑∑==
i i T
kik
ki
jj
j
rqq
rqq
Trace
00
11
&&∂∂
(1.38)
[ ] [ ] [ ]( )⎥⎥⎦⎢
⎢⎣
⎡=
=⎥⎤
⎢⎣
⎟⎞
⎜⋅=
=⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛=⎟⎟
⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛=⎟⎟
⎠
⎞⎜⎜⎝
⎛
∑∑= =j k
kjk
iTi
ii
i
j
i
Tiiii
T
iiiii
qqqTrr
qTTrace
T
dtrd
dtrdTrace
dtrd
dtrd
dtrd
1 1
0
000020
&&∂
∂∂
∂
∂
Energia cinetică a lanţului cinematic Energia cinetică a unei particule de masă dm aflată pe elementul i la vectorul
ataşat acestui element este: de poziţie [ ]ii r faţă de originea sistemului de referinţă
[ ]( ) [ ] [ ] [ ]( )
[ ]( ) [ ] [ ]( ) [ ]( )⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=⎥⎥⎦
⎤
⎢⎢⎣
⎡=
∑∑
∑∑
= =
= =
i
j
i
kkj
T00 (1.39)
k
iTi
ii
i
j
i
i
j
i
kkj
T
k
iTi
ii
i
j
ii
qqqTrdmr
qTTrace
dmqqqTrr
qTTracedK
1 1
1 1
00
21
21
&&
&&
∂∂
∂∂
∂∂
∂∂
nergia cinetică a întregului element i are expresia: E
28

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
[ ]( ) [ ] [ ] [ ]( )⎥⎥⎦
⎤
⎢⎢⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛== ∑∑ ∫∫
= =
i
j
i
kkj
T
k
i
ielem
Ti
ii
i
j
i
ielemii qq
qTdmrr
qTTracedKK
1 1
0
.
0
. 21
&&∂
∂∂
∂ (1.40)
Integrala din relaţia de mai sus este cunoscută sub numele de pseudomatricea inerţiei: [ ] [ ] [ ] == ∫
ielem
Ti
ii
ii dmrrJ
.
=⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢
⎢⎢⎢⎢⎢
⎣
⎡
∫∫∫∫
∫∫∫∫
∫∫∫
∫∫∫∫
ielemielemi
i
ielemi
i
ielemi
ielem
i
ielemi
i
ielem
ii
i
imi
ii
iielem
ii
ielemi
ii
i
ielem
i
ielemi
ii
iielem
ii
ielemi
ii
i
ielemi
ii
i
ielemi
i
dmdmzdmydmx
dmzdmzdmzydmzx
dmydmzydmyx
dmxdmzxdmyxdmx
....
.
2
..
....
....
2
(1.41
tiind că
,
⎥⎥⎥⎢ i
iiele .
dmzxI yy ∫ += )( 22 dmxzIxz ∫=
∫i dmy 2
dmzyIxx ∫ += )( 22 dmxyIxy ∫=
)
Ş :
,
(1.42)
,
dmyxIzz ∫ += )( 22 dmyzI yz ∫=
dmxxm ∫=
dmyym ∫=
dmzzm ∫=
se poate calcula:
22)()()( 222222
2 zzyyxx IIIdmzyyxzxdmx
++−=
+−+++= ∫∫
22 zzyyxx IIIdmy
+−=∫ (1.43)
29

1. Modelarea matematică a lanţurilor cinematice deschise folosite în structurile
mecanice ale roboţilor industriali, folosind software aplicativ
22 zzyyxx IIIdmz
−+=∫ .
Se obţine astfel:
[ ]
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢ +ixx II
II
⎢⎢⎢⎢
⎣
⎡
−
+−
++−
=
iiiiiii
iiizziyy
iyzixz
iiiyzizziyyixx
ixy
iiixzixyizziyyixx
i
mzmymxm
zmI
ymIIII
I
xmIIIII
J
2
2
2
(1.44)
Energia cinetică a unui manipulator cu n elemente este:
[ ]( )[ ] [ ]( )
[ ]( ) [ ]( )∑∑⎤⎡
=n i i T
TT 001 ∂∂ (1.45)
[ ]∑
∑ ∑∑∑
= = =
= = ==
⎥⎥⎦⎢
⎢⎣
=⎥⎥⎦
⎤
⎢⎢⎣
⎡==
i j kkj
k
ii
j
i
n
i
i
j
i
kkj
T
k
ii
j
in
ii
qqq
Jq
Trace
qqqTJ
qTTraceKK
1 1 1
1 1 1
00
1
2
21
&&
&&
∂∂
∂∂
∂∂
Dacă se notează K = energia cinetică a sistemului de acţionare (a motorului) acţ. idin cupla i, atunci:
2. 2 iaiiact qIK &= (1.46)
unde I
1
inerţia sistemului de acţionare din cupla i, exprimatăîn raport cu sistemul { }.
Astfel, energia cinetică totală a unui manipulator cu n elemente mobiatâtea cuple este:
ai reprezintăi
le şi tot
[ ])[ ] [ ]( )∑∑∑ ∑+⎥
⎤⎢=
n
iaikji
ii qIqqTJTTraceK 2
0 11&&&
∂∂ (1.47)
(⎡n i i 0
= = = =⎥⎢⎣i j k i
T
j qq1 1 1 122 ∂∂
Energia potenţială a lanţului cinematic Energia p
P = m ⋅ g ⋅ h (1.48) Dacă reprezintă vectorul de poziţie al centrului de masă al elementului i,
exprimat în sistemul , iar
⎦k
otenţială a unui obiect aflat laînălţimea hîn câmpul gravitaţional, g, este:
[ ]ii r}{i
30

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
[ ]⎥⎥
⎢⎢ zg
⎥
⎦
⎢
⎣
=
1
yg
reprezintă vectorul acceleraţiei gravitaţionaleîn raport nţială a elementului i este:
⎥⎤
⎢⎡ x
gg
(1.49)
[ ] [ ] [ ]iii
Tii rTgmP 0−=
cu axele sistemului de
[ ] [ ] [ ]∑=
−=n
ii
ii
Ti rTgmP
1
0
referinţă fix, atunci energia pote (1.50)
Energia potenţială totală a unui manipulator cu n elemente are expresia:
Lagrangeanul manipulatorului
(1.51)
[ ]( )[ ] [ ]( )∑∑∑ ⎢⎡
=−=n i i
ii TJTTracePKL001 ∂∂
[ ] [ ] [ ]∑ ∑=
= = =
++
+⎥⎤
⎢⎣n n
ii
ii
Ti
i j k
T
ij
rTgmqI
qqq
1
02
1 1 1
1
2
&
&&∂
Aplicând ecuaţia lui Lagrange pentru elementul i, rezultă =i
iai12
⎥⎦kj
kq∂ (1.52)
iii q
LqL
dtdF
∂∂
∂∂
−=&
(1.53)
Ecuaţiile dinamicii manipulatorului Calculăm derivatele:
[ ]( )[ ] [ ]( )
[ ]( )[ ] [ ]( )p
n
iapj
i
k
T
k
ii
j
i
n
ik
i
k
T
k
ii
p
i
p
qIqqTJ
qTTrace
qqTJ
qTTrace
q&=
∂L
&&
&
∑∑
∑∑
= =
= =
+⎥⎥⎦
⎤
⎢⎢⎣
⎡+
+⎥⎥⎦
⎤
⎢⎢⎣
⎡
1 1
00
1 1
00
21
21
∂∂
∂∂
∂∂
∂∂∂
(1.54)
Se observă că:
31

1. Modelarea matematică a lanţurilor cinematice deschise folosite în structurile
mecanice ale roboţilor industriali, folosind software aplicativ
[ ]( )[ ] [ ]( ) [ ]( )[ ] [ ]( )
[ ]( )[ ] [ ]( )⎥⎥⎦
⎤
⎢⎢⎣
⎡=
=
[ ]( )[ ] [ ]( )pap
n
ik
i
k
T
p
ii
k
i
p
qIqqTJ
qTTrace
qL
&&&
+⎥⎥⎦
⎤
⎢⎢⎣
⎡= ∑∑
= =1 1
00
∂∂
∂∂
∂∂
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
⎥⎥⎦
⎤
⎢⎢⎣
⎡
Ti
ii
TT
k
ii
j
i
T
k
ii
j
i
qTJ
qTTrace
qTJ
qTTrace
qTJ
qTTrace
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
00
0000
(1.55)
e obţine:
jk
[ ] 00
=p
i
qT
∂∂
S
(1.56)
Dar,
, pentru p > i (1.57)
Rezultă:
[ ]( )[ ] [ ]( )pap
n
pik
i
k
T
p
ii
k
i
p
qIqqTJ
qTTrace
qL
&&&
+⎥⎥⎦
⎤
⎢⎢⎣
⎡= ∑∑
= =1
00
∂∂
∂∂
∂∂
(1.58)
[ ]( )[ ] [ ]( )
[ ]( )[ ] [ ]( )
[ ]( )[ ] [ ]( )∑∑∑
∑∑∑
∑∑
= = =
= = =
= =
⎥⎥⎦
⎤
⎢⎢⎣
⎡+
+⎥⎥⎦
⎤
⎢⎢⎣
⎡+
++⎥⎥⎦
⎤
⎢⎢⎣pi k kp 1
⎡=
n
pi
i
kmk
i
m
T
k
ii
mp
i
n
pi
i
kmk
i
m
T
p
ii
mk
i
pa
n
k
i T
p
ii
i
qqqTJ
qqTTrace
qqqTJ
qqTTrace
qIqqTJ
qTTrace
qL
dtd
1 1
002
1 1
002
00
&&
&&
&&&&&
∂∂
∂∂∂
∂∂
∂∂∂
∂∂
∂∂
∂∂
(1.59)
Ultimul termen al ecuaţiei lui Lagrange este:
32

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
[ ]( )[ ] [ ]( )
[ ]( )[ ] [ ]( )
[ ] [ ] [ ]ii
p
in
pi
Ti
n
pi
i
jkj
i
k
T
j
ii
pk
i
n
pi
i
kkj
i
m
T
k
ii
pj
i
p
rqTgm
qqqTJ
qqTTrace
qqqTJ
qqTTrace
qL
∂∂
∂∂
∂∂∂
∂∂
∂∂∂
∂∂
0
1 1= = = ⎣
002
1 1
002
21
21
∑
∑∑∑
∑∑∑
=
= = =
+
+⎥⎥⎦
⎤
⎢⎢⎡
+
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
&&
&&
(1.60)
Interschimbând coeficienţii şi combinând termenii, se obţine:
[ ]( )[ ] [ ]( )
[ ] [ ] [ ]ii
ppi q∂=
in
Ti
n
pi
i
jkj
i
k
T
k
ii
jp
i
p
rTgm
qqqTJ
qqTTrace
qL
∂
∂∂
∂∂∂
∂∂
0
1 1
002
∑
∑∑∑= = =
+
+⎥⎥⎦
⎤
⎢⎢⎣
⎡= &&
(1.61)
Se calculează în continuare diferenţa:
[ ]( )[ ] [ ]( )
[ ]( )[ ] [ ]( )
[ ] [ ] [ ]ii
p
in
pi=
Schimbând indicele de însumare, p în i
Ti
n
pi
i
kmk
i
m
T
p
ii
mk
ipap
n
pik
i
k
T
p
ii
k
i
pp
rqTgm
qqTJ
qqTTraceqI
qqTJ
qTTrace
qL
qL
dtd
∂∂
∂∂
∂∂∂
∂∂
∂∂
∂∂
∂∂
0
1 1
002
1
00
∑
∑∑∑
∑∑
= = =
= =
−
⎥⎥⎦
⎤
⎢⎢⎣
⎡++
+⎥⎥⎦
⎤
⎢⎢⎣
⎡=−
&&&
&&&
şi i în j, se obţin ecuaţiile dinamicii:
q −& (1.62)
33

1. Modelarea matematică a lanţurilor cinematice deschise folosite în structurile
mecanice ale roboţilor industriali, folosind software aplicativ
[ ]( )[ ] [ ]( )
[ ]( )[ ] [ ]( )
[ ] [ ] [ ]jjn
T rT
gm∂
∑− jj q∂ iij=
n
ij
j
kmk
j
m
T
i
jj
mk
j
iai
n
ijk
j
k
T
i
jj
k
ji
qT
JqqT
Trace
qIqqT
JqT
TraceF
∂∂
∂∂∂
∂∂
∂∂
0
1 1
002
1
00
∑∑∑
∑∑
= = =
= =
⎥⎦⎢⎢⎣
⎡+
+⎥⎥⎦
⎤
⎢⎢⎣
⎡= &&&&
(1.63)
kkjijk DqqD +
=1
&& , (1.64)
qq −⎥⎤
&&
+
Se mai poate scrie: n nn
jiai
jjiji qIqDF ++= ∑∑∑
== 11
&&&& i
în care:
[ ]( )[ ]∑=
⎤⎡nT
TT 00 ∂∂⎥⎥⎦⎢
⎢⎣
=jip i
pp
j
pij q
Jq
TraceD,max ∂∂
(1.65)
[ ]( )[ ] [ ]( )∑
= ⎥⎥⎦
⎤
⎢⎢⎣
⎡=
n
kjip
T
i
pp
kj
pijk q
TJ
qqT
TraceD,,max
00
∂∂
∂∂∂
(1.66)
[ ] [ ]( ) [ ]∑=
la i; ij şi cupla j;
pla i, datorată vitezei din cupla j;
atorului. Spre deosebire de şte operatorul diferenţial ∆
−=n
ipi
i
i
pTpi r
qT
gmD∂
∂ 0
(1.67)
unde
[ ]( )
Dii reprezintă inerţia efectivă din cup reprezintă inerţia cuplajului între cupla i D
Dijj reprezintă coeficientul forţei centripete din cuDijk reprezintă coeficientul forţei Coriolis din cupla i,datorată vitezelor din cuplele j şi k Di reprezintă încărcarea gravitaţională din cupla i.
1.7.2. Algoritmul de calcul
Folosirea tehnicii moderne de calcul permite obţinerea cu uşurinţă a modelului dinamic nu numai pentru structuri plane, dar şi pentru structuri în spaţiu, viteza de lucru fiind direct influenţată de performanţele calculltele, algoritmul prezentat în lucrarea de faţă nu folosea
34

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
şi nu impune aproximări în determinarea inerţiilor Dij, Dijk. Algoritmul este rezentat în Anexa 7 şi are drept obiectiv stabilirea ecuaţiilor de mişcare pentru
sează structurilor formate din lanţuri cinematice e clasa a V-a. Algoritmul determină cu
nerţiile forţelor centripete
ărui element în raport cu stemul de referinţă ataşat (pot fi introduse ca funcţii de masele elementelor);
ărui element în raport cu sistemul de ferinţă ataşat;
are din fiecare cuplă cinematică, Iai, în raport cu stemul {i};
raţie gravitaţională, g, pe axele sistemului de referinţă x.
aţ : S ne ije
Rezultatele pe care la oferă algo
ine ia n
la j; oriolis din cupla i, dator
• încărcarea gravitaţională din fial n mărul
lor ar culare aţiilor.
(1.64), (1.65), (1.65), (1.65).
Notaţii utilizate în algoritm:
- masa eleIxx[i], Iyy[i], Izz[i] inerţie axiale ale elementului i în
raport cu axele sistemului de referinţă ataşat lui;
pfiecare cuplă cinematică. El se adredeschise ce au în componenţă numai cuple drapiditate inerţiile efective din cuple, inerţiile cuplajelor, işi Coriolis şi încărcarea gravitaţională din fiecare cuplă.
Mărimile de intrare pentru algoritm: • datele de intrare de la modelul geometric direct; • momentele de inerţie axiale şi centrifugale ale fiecsi• coordonatele centrului de greutate ale fiecre• inerţia sistemului de acţionsi• proiecţiile vectorului accelefiObserv ie e gl ază frecarea vâscoasă din cuple.
ritmul: • rţ efectivă din fiecare cuplă; • inerţia cuplajului di tre cupla i şi cupla j; • forţa centripetă din cupla i, datorată vitezei din cup• forţa C ată vitezelor din cuplele j şi k;
ecare cuplă; • ecuaţiile dinamicii manipulatorului-robot, numărul lor fiind eg cu ugradelor de libertate; • opţional: - programul poate determina ecuaţiile dinamicii pentru va i p tiatribuite variabilelor ce intervin în expresiile ecu Relaţiile de calcul folosite de algoritm sunt:
m[i] mentului i, exprimată în Kg
- momentele de
35

1. Modelarea matematică a lanţurilor cinematice deschise folosite în structurile
mecanice ale roboţilor industriali, folosind software aplicativ
Ixy[i], Ixz[i], Iyz[i] - momentele de iner]ie centrifugale ale elementului i în sistemul de referinţă ataşat lui;
Iac
ţie gravitaţională, g, în raport cu sistemul fix;
in[i, i] - inerţia efectivă din cupla i; in[i, j] - inerţia cuplajului dintre cupla i şi cupla j; in[i, j, j] - coeficientul forţei centripete din cupla i, datorată
vitezei din cupla j; in[i, j, k] - coeficientul fo is din cupla i, datorată
vitezelor din cuplele j ; in[i] - încărcarea gravitaţională din cupla i; [i][t] -forţ ă corespunzătoare gradului de
libertate q[i][t].
.7.3. Aplicaţie la manipulatorul plan 3R în plan vertical
Manipulatorul plan din figura 1.4. are elementele O0O1 = O1O2 = O2P = 2 dm. Elementele sunt considerate bare om e având densitatea ρ = 8 000 Kg/m3 şi secţiune circulară cu φ = 3 cm. Momentul de inerţie al sistemului de acţionare din fiecare cuplă în raport cu sistemul de referinţă corespunzător este Ia = 0,11 Kg ⋅ dm2. Se cere să se stabilească ecuaţiile dinamicii, dacă manipulatorul nu este încărcat cu sarcin
[i] - momentul de inerţie al sistemului de
acţionare corespunzător gradului de libertate qigx[0] - proiecţia pe axa x a vectorului acceleraţie
gravitaţională, g, în raport cu sistemul fix; gy[0] - proiecţia pe axa y a vectorului acceleraţie gravitaţională, g, în raport cu sistemul fix;
z[0] - proiecţia pe axa z a vectorg ului accelera DDD
D rţei Coriolşi k
DF a generalizat
1
ogen
ă în punctul P.
y3
x3
y2
x2q3
x1
q1
q2y1
y0
x0
O2
O1
O0
P
36

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
Figura 1.4.
Se întocmeşte tabelul conform notaţiei Denavit - Hartenberg, varianta a II-a: θ d a αi i i i
Elem. O0O1i = 1
q1 0 2 0
Elem. O1O2i = 2
q2 0 2 0
Elem. O2O3i = 3
q3 0 2 0
37

1. Modelarea matematică a lanţurilor cinematice deschise folosite în structurile
mecanice ale roboţilor industriali, folosind software aplicativ
Mase concentrate în centrele de greutate ale elementelor
lează programul de calcul din
s[q[1][t] + q[2][t]]) m[2] (2 g Cos[q[1][t]] + 2 g Cos[q[1][t] + q[2][t]] + g Cos[q[1][t] + q[2][t] + q[3][t]])
q[3][t]]) (q[2])'[t] (q[3])'[t] + [3] (-2 Sin[q[3][t]] - 2 Sin[q[2][t] + q[3][t]]) (q[3])'[t]2 + 0.11 (q[1])''[t] + (m[1]
[t] +
2 Cos[q[2][t] + q[3][t]])m[3]) (q[2])''[t] + (1 + 2 Cos[q[3][t]] + 2 os[q[2][t] + q[3][t]]) m[3] (q[3])''[t]
[t]]) m[3] + (2 m[2] Sin[q[2][t]]+ m[3] (4 Sin[q[2][t]] + Sin[q[2][t] + q[3][t]])) (q[1])'[t]2 - 4 m[3] Sin[q[3][t]] (q[1])'[t] (q[3])'[t] - 4 m[3]
Sin[os[q[2][t]]) m[2] + (5 + 4 Cos[q[2][t]] + 4 Cos[q[3][t]] + 2 Cos[q[2][t] + q[3][t]])
m[3 q[2])''[t] + (m[2] + (5 + 4 Cos[q[3][t]]) m[3]) (q[2])''[t] + (1 2 Cos[q[3][t]]) m[3] (q[3])''[t]
2}] Iyy ]=Izz[2]=-0.56*Integrate[x^2,{x,0,-2}] Iyy[3]=Izz[3]=-0.56*Integrate[x^2,{x,0,-2}]
Se face ipoteza simplificatoare că masa fiecărui element este concentrată în centrul de greutate al elementului respectiv; momentele de inerţie axiale şi centrifugale ale fiecărui element în raport cu sistemul de referinţă ataşat se introduc ca funcţii de masa elementului.
Pentru stabilirea ecuaţiilor dinamicii, se determină mai întâi modelul geometric direct, cu programul de calcul din Anexa 1, apoi modelul cinematic direct, folosind programul din Anexa 3 şi în cele din urmă se ruAnexa 5. Se obţin următoarele expresii ale forţelor generalizate din cuple: F[1][t] -> g Cos[q[1][t]] m[1] + (2 g Cos[q[1][t]] + g Co+m[3] + 2 (-2 m[2] Sin[q[2][t]] + m[3] (-4 Sin[q[2][t]] - 2 Sin[q[2][t] + q[3][t]])) (q[1])'[t] (q[2])'[t] + (-2 m[2] Sin[q[2][t]] + m[3] (-4 Sin[q[2][t]] - 2 Sin[q[2][t] + q[3][t]])) (q[2])'[t]2 + 2 m[3] (-2 Sin[q[3][t]] - 2 Sin[q[2][t] + q[3][t]]) (q[1])'[t] (q[3])'[t] + 2 m[3] (-2 Sin[q[3][t]] - 2 Sin[q[2][t] +m+ (5 + 4 Cos[q[2][t]]) m[2] + (9 + 8 Cos[q[2][t]] + 4 Cos[q[3][t]] + 4 Cos[q[2]q[3][t]]) m[3]) (q[1])''[t] + ((1 + 2 Cos[q[2][t]]) m[2] + (5 + 4 Cos[q[2][t]] + 4Cos[q[3][t]] + C F[2][t] -> g Cos[q[1][t] + q[2][t]] m[2] + (2 g Cos[q[1][t] + q[2][t]] + g Cos[q[1][t] + q[2][t] + q[3]2
q[3][t]] (q[2])'[t] (q[3])'[t] - 2 m[3] Sin[q[3][t]] (q[3])'[t]2 + ((1 + 2 C
]) (q[1])''[t] + 0.11 (+
F[3][t] ->g Cos[q[1][t] + q[2][t] + q[3][t]] m[3] + m[3] (2 Sin[q[3][t]] + 2 Sin[q[2][t] + q[3][t]]) (q[1])'[t]2 + 4 m[3] Sin[q[3][t]] (q[1])'[t](q[2])'[t] + 2 m[3] Sin[q[3][t]] (q[2])'[t]2 + (1 + 2 Cos[q[3][t]] + 2 Cos[q[2][t] + q[3][t]]) m[3] (q[1])''[t] + (1 + 2Cos[q[3][t]]) m[3] (q[2])''[t] + 0.11 (q[3])''[t] + m[3](q[3])''[t] Mase uniform distribuite pe lungimile elementelor În cazul în care masele sunt uniform distribuite pe lungimile elemenetelor, momentele de inerţie pot fi introduse de utilizator sub formă de integrală, aşa sum se arată în exemplul următor: Iyy[1]=Izz[1]=-0.56*Integrate[x^2,{x,0,-
[2
38

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
Studiul erorii de dinamică Algoritmul permite studiul influenţei maselor elementelor, a erorilor
geo
f[2]
(q[1])'[t] (q[2])'[t]- 82.1 (q[2])'[t]2 + 20 (q[1])'[t] (q[3])'[t] + 20 (q[2])'[t] (q[3])'[t] + 44.7344 (q[1])''[t] + 42.3
folosind tehnici avansate de calcul numeric
După stabilirea ecuaţiilor dinamicii, simularea dinamicii revine la integrarea
motoare al sistemelor de acţionare din cuple se consideră imp.
Simularea dinam rma tru obţinerea soluţiei,
xis don pas pe baza informaţiilor obţinute de la mai mulţi paşi anteriori şi metode
nipas, care cer informaţii numai de la pasul anterior, şi eventual, din intervalul
1.8.
metrice ale parametrilor constanţi Denavit - Hartenberg şi a abaterilor de la
valorile nominale ale coordonatelor robot de poziţie, viteză, şi acceleraţie asupra valorilor forţelor generalizate din cuple. Spre exemplu, pentru valori particulare atribuite maselor elementelor {m[1]->1.12, m[2]->1.12, m[3]->1.12} şi pentru o configuraţie robot impusă se pot obţine expresii ale ecuaţiilor de mişcare sub forma: f[1][t]->-72.6032(q[1])'[t](q[2])'[t]-36.3016 (q[2])'[t] + 196.831 (q[1])'[t]2 (q[3])'[t] + +196.831 (q[2])'[t] (q[3])'[t] + 160.694 (q[1])'[t] (q[4])'[t]+ 160.694 (q[2])'[t] (q[4])'[t]+ + 1086.73 (q[1])''[t] + 1075.95 (q[1])''[t] - 78.243 (q[3])''[t] + 44.7344 (q[4])''[t]
[t]-> 36.3016 (q[1])'[t]2 + 186.12 (q[1])'[t] (q[3.])'[t] + 186.12 (q[2])'[t] (q[3])'[t] + +164.2 (q[1])'[t] (q[4])'[t] + 164.2 (q[2])'[t] (q[4])'[t] + 1075.95 (q[1])''[t] + +1067.68 (q[2])''[t] - 82.1 (q[3])''[t] + 42.3 (q[4])''[t] f[3][t] -> -98.4157 (q[1])'[t]2 - 186.12 (q[1])'[t] (q[2])'[t] – 93.06 (q[2])'[t]2 - -20 (q[1])'[t] (q[4])'[t] - 20. (q[2])'[t] (q[4])'[t] - 78.243 (q[1])''[t] - 82.1 (q[2])''[t] + +22 (q[3])''[t] f[4][t] -> -80.3468 (q[1])'[t]2 - 164.2 +(q[2])''[t] + +10. (q[4])''[t]
1.8. Simularea dinamicii
1.8.1. Generalităţi
sistemului de ecuaţii diferenţiale (1.64), în care, de această dată, Fi, ce reprezintă vectorul momentelor cunoscut. Acesta poate fi exprimat prin valori constante sau prin funcţii de t
icii reprezintă problema directă a modelării dinamicii, în ucăreia se obţine ca soluţie comportarea manipulatorului. Pene tă uă tipuri de metode numerice: metode multipas, unde algoritmul dă soluţia de la uucuprins între pasul anterior şi cel curent.
2. Algoritmul de calcul
39

1. Modelarea matematică a lanţurilor cinematice deschise folosite în structurile
mecanice ale roboţilor industriali, folosind software aplicativ
În lucrarea de faţă este prezentat un algoritm de calcul (Anex
obiectiv determinarea curbelor de variaţie ale tuturor coordonatelor-robot, când se cun iţiale
puse poziţiilor cuplelor. Algoritmul determină singur condiţiile iniţiale cuple, motiv pentru care este necesar a se determina
ai întâi modelul cinematic, direct şi invers. Intervalul de timp pentru care se poate m mai mic, cu cât gradul
variaţie pe
intervale mici şi se vor trasa iecare interval mic, programul d acasta într-o singură r
Modelul se adresează structurilor formate din lanţuri cinematice deschise ce au
le coordonatelor robot de poziţie pentru diferite p
ate impuse, schimbarea maselor elementelor fluenţează curbele de variaţie ale coordonatelor robot de poziţie. Modelele de
astă lucrare au o mare plicabilitate în proiectare şi cercetare în domeniul roboţilor industriali.
eralizate corespunzătoare fiecărui grad de libertate; va ementelor;
e pe care la oferă algoritmul:
opţional: - se pot calcula valorile coordonatelor qi(t0) în orice moment t0; are astfel încât să putem
nterval de
elaţiile de calcul folosite de algoritm:
Sistemul de ecuaţii diferenţiale de ordinul doi care trebuie rezolvat este:
a 6) ce are drept
osc forţele generalizate din cuple, masele elementelor şi condiţiile inimcorespunzătoare vitezelor dinmface o interpolare pentru deter inarea curbelor este cu atât de complexitate al ecuaţiilor este mai mare. Pentru a stabili curbele de un interval mare de timp, se va partiţiona acest interval într-o succesiune de
curbele pentru fpermiţân ulare a sa.
în componenţă numai cuple de clasa a V-a. Algoritmul permite obţinerea cu rapiditate a curbelor de variaţie aintervale de tim şi studiul modalităţii în care schimbarea condiţiilor iniţiale, schimbarea forţelor generalizincalcul numeric în modelarea dinamicii prezentate în acea Mărimile de intrare pentru algoritm: • datele de intrare de la modelul geometric direct; • valorile forţelor gen• lorile maselor el• condiţiile iniţiale pentru poziţii, la fiecare coordonată robot: qi(0); • intervalul de timp pentru care să se realizeze interpolarea. Rezultatel • curbele ce descriu evoluţia în timp a coordonatelor robot de poziţie, pentru intervalul menţionat; •
- se poate apropia punctul de vizualizurmări evoluţia coordonatelor robot în punctele de interes; - se poate determina evoluţia coordonatelor qi(t), pentru un alt itimp. R
40

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
impusii
n
j
n
kkjijkiai
n
jjij FDqqDqIqD =+++ ∑∑∑
= == 1 11
&&&&&& (1.68)
Semnificaţia tuturor notaţiilor care apar este precizată în secţiunea 6.1.1.
ot ilizate în algoritm:
i[ , identică cu q[i][t] - variabila din cupla i ilei qi la momentul t0;
impus[i][t] - forţa generalizată impusă corespunzătoare coordonatei qi(t);
[i][0] - condiţii le referitoare la poziţii, pentru coordonata qi
- momentul iniţial şi final ce delimitează intervalul de timp
- momentul la care se doreşte determinarea valorilor oordonatelor robot de poziţie;
.8.3. Aplicaţie la manipulatorul plan 3R în plan vertical
Pentru manipulatorul din figura 1.4. se cere să se determine q1(t), q2(t), q3(t), acă se cunosc forţele generalizate (momentele motoare) din cuple F = 100.3 Kg ⋅
s2, masele 1
lucru: folosesc algoritmele corespunzătoare fiecărui model şi se determină: modelul
eome odelul cinematic direct, modelul cinematic invers, ecuaţiile de işcare; se lansează în execuţie algoritmul pentru simularea dinamicii lgoritmul permite studiul influenţei maselor elementelor asupra curbelor de ariaţie ale coordonatelor robot de poziţie.
Condiţiile iniţiale în care se face integrarea sunt: oordonate robot: {Q1[0] = 0.5, Q2[0] = 1, Q3[0] = 0.5}, iteze robot: {Q1'[0] = 0.919614, Q2'[0] = -2.31865, Q3'[0] = 1.89904}
Se realizează interpolarea pentru mai multe intervale de timp:
N aţii ut
t] QQ0[i][t0] - valoarea particulară a variabF
q le iniţia(t);
ti, tf pe care se realizează interpolarea; t0c 1 d 1
dm2 ⋅ rad/s2, F2 = 78.56 Kg ⋅ dm2 ⋅ rad/s2, F3 = 47.69 Kg ⋅ dm2 ⋅ rad/elementelor m1 = m2 = m3 = 1.12 Kg, şi condiţiile iniţiale q1(0) = 0.5 rad, q2(0) =rad, q3(0) = 0.5 rad. Mod de• se g tric direct, mm• Av
CV
41

1. Modelarea matematică a lanţurilor cinematice deschise folosite în structurile
mecanice ale roboţilor industriali, folosind software aplicativ
42
Se pot calcula valorile coordonatelor robot la diferite momente de timp: {{Q0[1][0.2] -> 0.82533}, {Q0[2][0.2] -> 0.237035}, {Q0[3][0.2] -> 2.01332}} Se poate apropia punctul de vizualizare de intervalul t ∈ (-0.2, 0.2)[s], ca în figura de mai jos:
t[s]
q[i][rad]
q[i][rad]
t[s]
q[2][t]
q[1][t] q[3][t]

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
Anexa 1 Print["MODELUL GEOMETRIC DIRECT"] Print["n=",n=Input["-MODEL GEOMETRIC DIRECT- Introduceti nr. gradelor de libertate n " ]] Do[teta[i][t]=Input["-MODEL GEOMETRIC DIRECT- Introduceti" teta[i][t]],{i,1,n,1}] Print["Valorile lui teta:"] Do[Print[teta[i][t]],{i,1,n,1}] Do[d[i][t]=Input["-MODEL GEOMETRIC DIRECT-Introduceti"d[i][t]],{i,1,n,1}] Print["Valorile lui d:"] Do[Print[d[i][t]],{i,1,n,1}] Do[a[i][t]=Input["-MODEL GEOMETRIC DIRECT-Introduceti"a[i][t]],{i,1,n,1}] Print["Valorile lui a:"] Do[Print[a[i][t]],{i,1,n,1}] Do[alpha[i][t]=Input["-MODEL GEOMETRIC DIRECT-Introduceti"alpha[i][t]],{i,1,n,1}] Print["Valorile lui alpha:"] Do[Print[alpha[i][t]],{i,1,n,1}] Print["Transformatorii omogeni compusi sunt:"] Print[""] Do[Print[t[i,i-1]->{{Cos[teta[i][t]],-Sin[teta[i][t]] Cos[alpha[i][t]],Sin[teta[i][t]] Sin[alpha[i][t]],a[i][t] Cos[teta[i][t]]},{Sin[teta[i][t]],Cos[teta[i][t]] Cos[alpha[i][t]],-Cos[teta[i][t]] Sin[alpha[i][t]],a[i][t] Sin[teta[i][t]]},{0,Sin[alpha[i][t]],Cos[alpha[i][t]],d[i][t]},{0,0,0,1}}],{i,1,n}] Do[T[i,i-1]={{Cos[teta[i][t]],-Sin[teta[i][t]] Cos[alpha[i][t]],Sin[teta[i][t]] Sin[alpha[i][t]],a[i][t] Cos[teta[i][t]]},{Sin[teta[i][t]],Cos[teta[i][t]] Cos[alpha[i][t]],-Cos[teta[i][t]] Sin[alpha[i][t]],a[i][t] Sin[teta[i][t]]},{0,Sin[alpha[i][t]],Cos[alpha[i][t]],d[i][t]},{0,0,0,1}},{i,1,n}] Do[teta[i][t]=.,{i,1,n}] Do[d[i][t]=.,{i,1,n}] Do[a[i][t]=.,{i,1,n}] Do[alpha[i][t]=.,{i,1,n}] Do[T[i,0]=T[i-1,0].T[i,i-1],{i,2,n}] Do[R[i,i-1]=Table[Part[T[i,i-1],k,m],{k,1,3},{m,1,3}],{i,1,n}] Print["Coordonatele lui P in ultimul sistem de referinta sunt:"] Print[""] Print["x=",xP[n]=Input["-MODEL GEOMETRIC DIRECT-Introduceti"xP[n]]] Print["y=",yP[n]=Input["-MODEL GEOMETRIC DIRECT-Introduceti"yP[n]]] Print["z=",zP[n]=Input["-MODEL GEOMETRIC DIRECT-Introduceti"zP[n]]] Print["r=",rP[n]={{xP[n]},{yP[n]},{zP[n]},{1}}] xP[n]=. yP[n]=. zP[n]=. Print["Vectorul de pozitie al lui P in sistemul 0 este:"] Do[Print[t[i,0]->Factor[T[i,0],Trig->True]],{i,1,n}] Print["rP[0]=",Factor[rP[0]=T[n,0].rP[n],Trig->True]] MGD=Factor[rP[0],Trig->True];
43

1. Modelarea matematică a lanţurilor cinematice deschise folosite în structurile
mecanice ale roboţilor industriali, folosind software aplicativ
Anexa 2 Print["MODELUL GEOMETRIC INVERS"] Print[""] Timpus[n,0]=.; tip=Input["Precizati tipul robotului: PLAN sau SPATIAL"]; If[tip==PLAN,,,ec=6]; If[tip==SPATIAL,,,ec=4]; Timpus[n,0]=Input["-MODEL GEOMETRIC INVERS-Introduceti"Timpus[n,0]]; Print[timpus[n,0]->Timpus[n,0]] Print[""] Table[rot[i]={Sin[q[i][t]],Cos[q[i][t]]},{i,1,n}]; Table[tr[i]={q[i][t]},{i,1,n}]; Print["Necunoscutele sunt: ",necunoscute=Input["Precizati tipul cuplelor, sub forma:{rot[i],tr[j]...},daca i este cupla de rotatie si j este cupla de translatie"]] nec=Length[Flatten[necunoscute]]; test1=ec-nec; If[tip==SPATIAL,,,If[test1<0,,m=Length[nectot=Flatten[necunoscute]]]]; If[tip==SPATIAL,,,If[test1<0,,If[ec-m!=3,,MGI=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]],{{1},{2},{3},{5},{6},{7},{8}}],nectot]]]] If[tip==SPATIAL,,,If[test1<0,,If[ec-m!=2,,If[Length[necunoscute]!=1,,MGI=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]],{{4},{5},{6},{7},{8}}],nectot]]]]] If[tip==SPATIAL,,,If[test1<0,,If[ec-m!=2,,If[Length[necunoscute]!=2,,MGI=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]],{{1},{2},{3},{5},{6},{7}}],nectot]]]]] If[tip==SPATIAL,,,If[test1<0,,If[ec-m!=1,,MGI=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]],{{5},{6},{7},{8}}],nectot]]]] If[tip==SPATIAL,,,If[test1<0,,If[ec-m!=0,,MGI=NSolve[T[n,0]==N[Timpus[n,0]],nectot]]]] If[tip==SPATIAL,,,If[test1>=0,,Timpus[2,0]=Input["Deoarece nr. de ecuatii este insuficient pentru rezolvarea completa a modelului geometric invers mai este necesara intoducerea matricei" t[2,0]]]]; If[tip==SPATIAL,,,If[test1>=0,,Print[timpus[2,0]->Timpus[2,0]]]] If[tip==SPATIAL,,,If[test1>=0,,m11=Length[nectot12=Union[Part[necunoscute,1],Part[necunoscute,2]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[ec-m11!=2,,MGI11=NSolve[Delete[Flatten[Table[{Part[T[2,0],i,j]==Part[N[Timpus[2,0]],i,j]},{i,1,4},{j,1,4}]],{{1},{2},{3},{5},{6},{7}}],nectot12]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[ec-m11!=1,,MGI11=NSolve[Delete[Flatten[Table[{Part[T[2,0],i,j]==Part[N[Timpus[2,0]],i,j]},{i,1,4},{j,1,4}]],{{5},{6},{7},{8}}],nectot12]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[ec-m11!=0,,MGI11=NSolve[T[2,0]==N[Timpus[2,0]],nectot12]]]]; If[tip==SPATIAL,,,If[test1>=0,,test2=ec-(nec-Length[nectot12])]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2<0,,m21=Length[Flatten[Delete[necunoscute,{{1},{2}}]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2<0,,If[ec-m21!=3,,MGI21=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[Timpus[n,0],i,j]},{i,1,4},{j,1,4}]/.MGI11],{{1},{2},{3},{5},{6},{7},{8}}],Flatten[Delete[necunoscute,{{1},{2}}]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2<0,,If[ec-m21!=2,,If[Length[Delete[necunoscute,{{1},{2}}]]!=1,,MGI21=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11],{{4},{5},{6},{7},{8}}],Flatten[Delete[necunoscute,{{1},{2}}]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2<0,,If[ec-m21!=2,,If[Length[Delete[necunoscute,{{1},{2}}]]!=2,,MGI21=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11],{{1},{2},{3},{5},{6},{7}}],Flatten[Delete[necunoscute,{{1},{2}}]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2<0,,If[ec-m21!=1,,MGI21=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11],{{5},{6},{7},{8}}],Flatten[Delete[necunoscute,{{1},{2}}]]]]]]];
44

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
If[tip==SPATIAL,,,If[test1>=0,,If[test2<0,,If[ec-m21!=0,,MGI21=NSolve[T[n,0]==N[Timpus[n,0]]/.MGI11,Flatten[Delete[necunoscute,{{1},{2}}]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2<0,,{MGI11,MGI21}]]] If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,Timpus[4,0]=Input["Deoarece nr. de ecuatii este inca insuficient pentru rezolvarea completa a modelului geometric invers mai este necesara intoducerea matricei" t[4,0]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,Print[timpus[4,0]->Timpus[4,0]]]]] If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,m22=Length[nectot34=Union[Part[necunoscute,3],Part[necunoscute,4]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[ec-m22!=2,,MGI22=NSolve[Delete[Flatten[Table[{Part[T[4,0],i,j]==Part[N[Timpus[4,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11],{{1},{2},{3},{5},{6},{7}}],nectot34]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[ec-m22!=1,,MGI22=NSolve[Delete[Flatten[Table[{Part[T[4,0],i,j]==Part[N[Timpus[4,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11],{{5},{6},{7},{8}}],nectot34]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[ec-m22!=0,,MGI22=NSolve[T[4,0]==N[Timpus[4,0]]/.MGI11,nectot34]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,test3=ec-(nec-Length[Union[nectot12,nectot34]])]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3<0,,m31=Length[Flatten[Delete[necunoscute,{{1},{2},{3},{4}}]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3<0,,If[ec-m31!=3,,MGI31=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11/.MGI22],{{1},{2},{3},{5},{6},{7},{8}}],Flatten[Delete[necunoscute,{{1},{2},{3},{4}}]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3<0,,If[ec-m31!=2,,If[Length[Delete[necunoscute,{{1},{2},{3},{4}}]]!=1,,MGI31=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11/.MGI22],{{4},{5},{6},{7},{8}}],Flatten[Delete[necunoscute,{{1},{2},{3},{4}}]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3<0,,If[ec-m31!=2,,If[Length[Delete[necunoscute,{{1},{2},{3},{4}}]]!=2,,MGI31=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11/.MGI22],{{1},{2},{3},{5},{6},{7}}],Flatten[Delete[necunoscute,{{1},{2},{3},{4}}]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3<0,,If[ec-m31!=1,,MGI31=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11/.MGI22],{{5},{6},{7},{8}}],Flatten[Delete[necunoscute,{{1},{2},{3},{4}}]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3<0,,If[ec-m31!=0,,MGI31=NSolve[Flatten[T[n,0]==N[Timpus[n,0]]/.MGI11/.MGI22],Flatten[Delete[necunoscute,{{1},{2},{3},{4}}]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3<0,,{MGI11,MGI22,MGI31}]]]] If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,Timpus[6,0]=Input["Deoarece nr. de ecuatii este inca insuficient pentru rezolvarea completa a modelului geometric invers mai este necesara intoducerea matricei" t[6,0]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,Print[timpus[6,0]->Timpus[6,0]]]]]] If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,m32=Length[nectot56=Union[Part[necunoscute,5],Part[necunoscute,6]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[ec-m32!=2,,MGI32=NSolve[Delete[Flatten[Table[{Part[T[6,0],i,j]==Part[N[Timpus[6,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11/.MGI22],{{1},{2},{3},{5},{6},{7}}],nectot56]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[ec-m32!=1,,MGI32=NSolve[Delete[Flatten[Table[{Part[T[6,0],i,j]==Part[N[Timpus[6,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11/.MGI22],{{5},{6},{7},{8}}],nectot56]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[ec-m32!=0,,MGI32=NSolve[Flatten[T[6,0]==N[Timpus[6,0]]/.MGI11/.MGI22],nectot56]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,test4=ec-(nec-Length[Union[nectot12,nectot34,nectot56]])]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4<0,,m41=Length[Flatten[Delete[necunoscute,{{1},{2},{3},{4},{5},{6}}]]]]]]]];
45

1. Modelarea matematică a lanţurilor cinematice deschise folosite în structurile
mecanice ale roboţilor industriali, folosind software aplicativ
If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4<0,,If[ec-m41!=3,,MGI41=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11/.MGI22/.MGI32],{{1},{2},{3},{5},{6},{7},{8}}],Flatten[Delete[necunoscute,{{1},{2},{3},{4},{5},{6}}]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4<0,,If[ec-m41!=2,,If[Length[Delete[necunoscute,{{1},{2},{3},{4},{5},{6}}]]!=1,,MGI41=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11/.MGI22/.MGI32],{{4},{5},{6},{7},{8}}],Flatten[Delete[necunoscute,{{1},{2},{3},{4},{5},{6}}]]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4<0,,If[ec-m41!=2,,If[Length[Delete[necunoscute,{{1},{2},{3},{4},{5},{6}}]]!=2,,MGI41=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11/.MGI22/.MGI32],{{1},{2},{3},{5},{6},{7}}],Flatten[Delete[necunoscute,{{1},{2},{3},{4},{6}}]]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4<0,,If[ec-m41!=1,,MGI41=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11/.MGI22/.MGI32],{{5},{6},{7},{8}}],Flatten[Delete[necunoscute,{{1},{2},{3},{4},{5},{6}}]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4<0,,If[ec-m41!=0,,MGI41=NSolve[Flatten[T[n,0]==N[Timpus[n,0]]/.MGI11/.MGI22/.MGI32],Flatten[Delete[necunoscute,{{1},{2},{3},{4},{5},{6}}]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4<0,,{MGI11,MGI22,MGI32,MGI41}]]]]] If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,Timpus[8,0]=Input["Deoarece nr. de ecuatii este inca insuficient pentru rezolvarea completa a modelului geometric invers mai este necesara intoducerea matricei" t[8,0]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,Print[timpus[8,0]->Timpus[8,0]]]]]]] If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,m42=Length[nectot78=Union[Part[necunoscute,7],Part[necunoscute,8]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[ec-m42!=2,,MGI42=NSolve[Delete[Flatten[Table[{Part[T[8,0],i,j]==Part[N[Timpus[8,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11/.MGI22/.MGI32],{{1},{2},{3},{5},{6},{7}}],nectot78]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[ec-m42!=1,,MGI42=NSolve[Delete[Flatten[Table[{Part[T[8,0],i,j]==Part[N[Timpus[8,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11/.MGI22/.MGI32],{{5},{6},{7},{8}}],nectot78]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[ec-m42!=0,,MGI42=NSolve[Flatten[T[8,0]==N[Timpus[8,0]]/.MGI11/.MGI22/.MGI32],nectot78]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,test5=ec-(nec-Length[Union[nectot12,nectot34,nectot56,nectot78]])]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5<0,,m51=Length[Flatten[Delete[necunoscute,{{1},{2},{3},{4},{5},{6},{7},{8}}]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5<0,,If[ec-m51!=3,,MGI51=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11/.MGI22/.MGI32/.MGI42],{{1},{2},{3},{5},{6},{7},{8}}],Flatten[Delete[necunoscute,{{1},{2},{3},{4},{5},{6},{7},{8}}]]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5<0,,If[ec-m51!=2,,If[Length[Delete[necunoscute,{{1},{2},{3},{4},{5},{6},{7},{8}}]]!=1,,MGI51=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11/.MGI22/.MGI32/.MGI42],{{4},{5},{6},{7},{8}}],Flatten[Delete[necunoscute,{{1},{2},{3},{4},{5},{6},{7},{8}}]]]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5<0,,If[ec-m51!=2,,If[Length[Delete[necunoscute,{{1},{2},{3},{4},{5},{6},{7},{8}}]]!=2,,MGI51=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11/.MGI22/.MGI32/.MGI42],{{1},{2},{3},{5},{6},{7}}],Flatten[Delete[necunoscute,{{1},{2},{3},{4},{6},{7},{8}}]]]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5<0,,If[ec-m51!=1,,MGI51=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11/.MGI22/.MGI32/.MGI42],{{5},{6},{7},{8}}],Flatten[Delete[necunoscute,{{1},{2},{3},{4},{5},{6},{7},{8}}]]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5<0,,If[ec-m51!=0,,MGI51=NSolve[Flatten[T[n,0]==N[Timpus[n,0]]/.MGI11/.MGI22/.MGI32/.MGI42],Flatten[Delete[necunoscute,{{1},{2},{3},{4},{5},{6},{7},{8}}]]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5<0,,{MGI11,MGI22,MGI32,MGI42,MGI51}]]]]]]
46

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,Timpus[10,0]=Input["Deoarece nr. de ecuatii este inca insuficient pentru rezolvarea completa a modelului geometric invers mai este necesara intoducerea matricei" t[10,0]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,Print[timpus[10,0]->Timpus[10,0]]]]]]]] If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,m52=Length[nectot910=Union[Part[necunoscute,9],Part[necunoscute,10]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,If[ec-m52!=2,,MGI52=NSolve[Delete[Flatten[Table[{Part[T[10,0],i,j]==Part[N[Timpus[10,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11/.MGI22/.MGI32/.MGI42],{{1},{2},{3},{5},{6},{7}}],nectot910]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,If[ec-m52!=1,,MGI52=NSolve[Delete[Flatten[Table[{Part[T[10,0],i,j]==Part[N[Timpus[10,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11/.MGI22/.MGI32/.MGI42],{{5},{6},{7},{8}}],nectot910]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,If[ec-m52!=0,,MGI52=NSolve[Flatten[T[10,0]==N[Timpus[10,0]]/.MGI11/.MGI22/.MGI32/.MGI42],nectot910]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,test6=ec-(nec-Length[Union[nectot12,nectot34,nectot56,nectot78,nectot910]])]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,If[test6<0,,m61=Length[Flatten[Delete[necunoscute,{{1},{2},{3},{4},{5},{6},{7},{8},{9},{10}}]]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,If[test6<0,,If[ec-m61!=3,,MGI61=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11/.MGI22/.MGI32/.MGI42/.MGI52],{{1},{2},{3},{5},{6},{7},{8}}],Flatten[Delete[necunoscute,{{1},{2},{3},{4},{5},{6},{7},{8},{9},{10}}]]]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,If[test6<0,,If[ec-m61!=2,,If[Length[Delete[necunoscute,{{1},{2},{3},{4},{5},{6},{7},{8},{9},{10}}]]!=1,,MGI52=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11/.MGI22/.MGI32/.MGI42/.MGI52],{{4},{5},{6},{7},{8}}],Flatten[Delete[necunoscute,{{1},{2},{3},{4},{5},{6},{7},{8},{9},{10}}]]]]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,If[test6<0,,If[ec-m61!=2,,If[Length[Delete[necunoscute,{{1},{2},{3},{4},{5},{6},{7},{8},{9},{10}}]]!=2,,MGI52=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11/.MGI22/.MGI32/.MGI42/.MGI52],{{1},{2},{3},{5},{6},{7}}],Flatten[Delete[necunoscute,{{1},{2},{3},{4},{6},{7},{8},{9},{10}}]]]]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,If[test6<0,,If[ec-m61!=1,,MGI61=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11/.MGI22/.MGI32/.MGI42/.MGI52],{{5},{6},{7},{8}}],Flatten[Delete[necunoscute,{{1},{2},{3},{4},{5},{6},{7},{8},{9},{10}}]]]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,If[test6<0,,If[ec-m61!=0,,MGI61=NSolve[Flatten[T[n,0]==N[Timpus[n,0]]/.MGI11/.MGI22/.MGI32/.MGI42/.MGI52],Flatten[Delete[necunoscute,{{1},{2},{3},{4},{5},{6},{7},{8},{9},{10}}]]]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,If[test6<0,,{MGI11,MGI22,MGI32,MGI42,MGI52,MGI61}]]]]]]] If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,If[test6>=0,,Timpus[12,0]=Input["Deoarece nr. de ecuatii este inca insuficient pentru rezolvarea completa a modelului geometric invers mai este necesara intoducerea matricei" t[12,0]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,If[test6>=0,,Print[timpus[12,0]->Timpus[12,0]]]]]]]]] If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,If[test6>=0,,m62=Length[nectot1112=Union[Part[necunoscute,11],Part[necunoscute,12]]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,If[test6>=0,,If[ec-m62!=2,,MGI62=NSolve[Delete[Flatten[Table[{Part[T[12,0],i,j]==Part[N[Timpus[12,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11/.MGI22/.MGI32/.MGI42/.MGI52],{{1},{2},{3},{5},{6},{7}}],nectot1112]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,If[test6>=0,,If[ec-m62!=1,,MGI62=NSolve[Delete[Flatten[Table[{Part[T[12,0],i,j]==Part[N[Timpus[12,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11/.MGI22/.MGI32/.MGI42/.MGI52],{{5},{6},{7},{8}}],nectot1112]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,If[test6>=0,,If[ec-m62!=0,,MGI62=NSolve[Flatten[T[12,0]==N[Timpus[12,0]]/.MGI11/.MGI22/.MGI32/.MGI42/.MGI52],nectot1112]]]]]]]]];
47

1. Modelarea matematică a lanţurilor cinematice deschise folosite în structurile
mecanice ale roboţilor industriali, folosind software aplicativ
If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,If[test6>=0,,test7=ec-(nec-Length[Union[nectot12,nectot34,nectot56,nectot78,nectot910,nectot1112]])]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,If[test6>=0,,If[test7<0,,m71=Length[Flatten[Delete[necunoscute,{{1},{2},{3},{4},{5},{6},{7},{8},{9},{10},{11},{12}}]]]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,If[test6>=0,,If[test7<0,,If[ec-m71!=3,,MGI71=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11/.MGI22/.MGI32/.MGI42/.MGI52/.MGI62],{{1},{2},{3},{5},{6},{7},{8}}],Flatten[Delete[necunoscute,{{1},{2},{3},{4},{5},{6},{7},{8},{9},{10},{11},{12}}]]]]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,If[test6>=0,,If[test7<0,, If[ec-m71!=2,,If[Length[Delete[necunoscute,{{1},{2},{3},{4},{5},{6},{7},{8},{9},{10},{11},{12}}]]!=1,,MGI72= NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11/.MGI22/.MGI32/.MGI42/.MGI52/.MGI62],{{4},{5},{6},{7},{8}}],Flatten[Delete[necunoscute,{{1},{2},{3},{4},{5},{6},{7},{8},{9},{10}}]]]]]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,If[test6>=0,,If[test7<0,, If[ec-m71!=2,,If[Length[Delete[necunoscute,{{1},{2},{3},{4},{5},{6},{7},{8},{9},{10},{11},{12}}]]!=2,,MGI72= NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11/.MGI22/.MGI32/.MGI42/.MGI52/.MGI62],{{1},{2},{3},{5},{6},{7}}],Flatten[Delete[necunoscute,{{1},{2},{3},{4},{6},{7},{8},{9},{10}}]]]]]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,If[test6>=0,,If[test7<0,, If[ec-m71!=1,,MGI71=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4}, {j,1,4}]/.MGI11/.MGI22/.MGI32/.MGI42/.MGI52/.MGI62],{{5},{6},{7},{8}}],Flatten[Delete[necunoscute, {{1},{2},{3},{4},{5},{6},{7},{8},{9},{10},{11},{12}}]]]]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,If[test6>=0,,If[test7<0,, If[ec-m71!=0,,MGI71=NSolve[Flatten[T[n,0]==N[Timpus[n,0]]/.MGI11/.MGI22/.MGI32/.MGI42/.MGI52/. MGI62],Flatten[Delete[necunoscute,{{1},{2},{3},{4},{5},{6},{7},{8},{9},{10},{11},{12}}]]]]]]]]]]]]; If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,If[test6>=0,,If[test7<0,,{MGI11,MGI22,MGI32,MGI42,MGI52,MGI62,MGI71}]]]]]]]] If[tip==SPATIAL,,,If[test1>=0,,If[test2>=0,,If[test3>=0,,If[test4>=0,,If[test5>=0,,If[test6>=0,,If[test7>=0,,Print["Programul a fost conceput pentru a efectua MGI la manipulatoare cu redundanta mai mica sau egala cu 10. In acest caz este mai mare"]]]]]]]]] If[tip==PLAN,,,If[test1<0,,m=Length[nectot=Flatten[necunoscute]]]]; If[tip==PLAN,,,If[test1<0,,If[ec-m<0,,Print[""]]]] If[tip==PLAN,,,If[test1<0,,If[ec-m<0,,Print["Ecuatia matriciala este: ",t[n,0]==timpus[n,0],Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]]]]]] If[tip==PLAN,,,If[test1<0,,If[ec-m<0,,Print["Ecuatii eliminate: ",el=Input["Introduceti {}, daca nu doriti sa eliminati ecuatii, sau introduceti sub forma: {{1},{2}...} pozitiile pe care le ocupa ecuatiile pe care doriti sa le eliminati din ecuatia matriciala " t[n,0]==timpus[n,0]]]]]] If[tip==PLAN,,,If[test1<0,,If[ec-m<0,,Print[""]]]] If[tip==PLAN,,,If[test1<0,,If[ec-m<0,,Print[MGI=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]],el],nectot]]]]] If[tip==PLAN,,,If[test1>=0,,lg1=Length[Flatten[Delete[necunoscute,{-1}]]]]]; If[tip==PLAN,,,If[test1>=0,,If[lg1>6,,Timpus[n-1,0]=Input["Deoarece nr. de ecuatii este insuficient pentru rezolvarea completa a modelului geometric invers mai este necesara intoducerea matricei" t[n-1,0]]]]]; If[tip==PLAN,,,If[test1>=0,,If[lg1>6,,Print[timpus[n-1,0]->Timpus[n-1,0]]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1>6,,Print[""]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1>6,,Print["Ecuatia matriciala este: ",t[n-1,0]==timpus[n-1,0],Flatten[Table[{Part[T[n-1,0],i,j]==Part[N[Timpus[n-1,0]],i,j]},{i,1,4},{j,1,4}]]]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1>6,,Print["Ecuatii eliminate: ",el11=Input["Introduceti {}, daca nu doriti sa eliminati ecuatii, sau introduceti sub forma: {{1},{2}...} pozitiile pe care le ocupa ecuatiile pe care doriti sa le eliminati din ecuatia matriciala " t[n-1,0]==timpus[n-1,0]]]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1>6,,Print[""]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1>6,,Print[MGI11=NSolve[Delete[Flatten[Table[{Part[T[n-1,0],i,j]==Part[N[Timpus[n-1,0]],i,j]},{i,1,4},{j,1,4}]],el11],Flatten[Delete[necunoscute,{-1}]]]]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1>6,,Print[""]]]]
48

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
If[tip==PLAN,,,If[test1>=0,,If[lg1>6,,Print["Ecuatia matriciala este: ",t[n,0]==timpus[n,0],Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11]]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1>6,,Print["Ecuatii eliminate: ",el12=Input["Introduceti {}, daca nu doriti sa eliminati ecuatii, sau introduceti sub forma: {{1},{2}...} pozitiile pe care le ocupa ecuatiile pe care doriti sa le eliminati din ecuatia matriciala " t[n,0]==timpus[n,0]]]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1>6,,Print[""]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1>6,,Print[MGI12=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]/.MGI11],el12],Flatten[Complement[necunoscute,Delete[necunoscute,{-1}]]]]]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1<=6,,lg2=Length[Flatten[Delete[necunoscute,{{-1},{-2}}]]]]]]; If[tip==PLAN,,,If[test1>=0,,If[lg1<=6,,If[lg2>6,,Timpus[n-2,0]=Input["Deoarece nr. de ecuatii este insuficient pentru rezolvarea completa a modelului geometric invers mai este necesara intoducerea matricei" t[n-2,0]]]]]]; If[tip==PLAN,,,If[test1>=0,,If[lg1<=6,,If[lg2>6,,Print[timpus[n-2,0]->Timpus[n-2,0]]]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1<=6,,If[lg2>6,,Print[""]]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1<=6,,If[lg2>6,,Print["Ecuatia matriciala este: ",t[n-2,0]==timpus[n-2,0],Flatten[Table[{Part[T[n-2,0],i,j]==Part[N[Timpus[n-2,0]],i,j]},{i,1,4},{j,1,4}]]]]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1<=6,,If[lg2>6,,Print["Ecuatii eliminate: ",el21=Input["Introduceti {}, daca nu doriti sa eliminati ecuatii, sau introduceti sub forma: {{1},{2}...} pozitiile pe care le ocupa ecuatiile pe care doriti sa le eliminati din ecuatia matriciala " t[n-2,0]==timpus[n-2,0]]]]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1<=6,,If[lg2>6,,Print[""]]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1<=6,,If[lg2>6,,Print[MGI21=NSolve[Delete[Flatten[Table[{Part[T[n-2,0],i,j]==Part[N[Timpus[n-2,0]],i,j]},{i,1,4},{j,1,4}]],el21],Flatten[Delete[necunoscute,{{-1},{-2}}]]]]]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1<=6,,If[lg2>6,,Print[""]]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1<=6,,If[lg2>6,,Print["Ecuatia matriciala este: ",t[n,0]==timpus[n,0],Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]/.MGI21]]]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1<=6,,If[lg2>6,,Print["Ecuatii eliminate: ",el22=Input["Introduceti {}, daca nu doriti sa eliminati ecuatii, sau introduceti sub forma: {{1},{2}...} pozitiile pe care le ocupa ecuatiile pe care doriti sa le eliminati din ecuatia matriciala " t[n,0]==timpus[n,0]]]]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1<=6,,If[lg2>6,,Print[""]]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1<=6,,If[lg2>6,,Print[MGI22=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]/.MGI21],el22],Flatten[Complement[necunoscute,Delete[necunoscute,{{-1},{-2}}]]]]]]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1<=6,,If[lg2<=6,,lg3=Length[Flatten[Delete[necunoscute,{{-1},{-2},{-3}}]]]]]]]; If[tip==PLAN,,,If[test1>=0,,If[lg1<=6,,If[lg2<=6,,Timpus[n-3,0]=Input["Deoarece nr. de ecuatii este insuficient pentru rezolvarea completa a modelului geometric invers mai este necesara intoducerea matricei" t[n-3,0]]]]]]; If[tip==PLAN,,,If[test1>=0,,If[lg1<=6,,If[lg2<=6,,Print[timpus[n-3,0]->Timpus[n-3,0]]]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1<=6,,If[lg2<=6,,Print[""]]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1<=6,,If[lg2<=6,,Print["Ecuatia matriciala este: ",t[n-3,0]==timpus[n-3,0],Flatten[Table[{Part[T[n-3,0],i,j]==Part[N[Timpus[n-3,0]],i,j]},{i,1,4},{j,1,4}]]]]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1<=6,,If[lg2<=6,,Print["Ecuatii eliminate: ",el31=Input["Introduceti {}, daca nu doriti sa eliminati ecuatii, sau introduceti sub forma: {{1},{2}...} pozitiile pe care le ocupa ecuatiile pe care doriti sa le eliminati din ecuatia matriciala " t[n-3,0]==timpus[n-3,0]]]]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1<=6,,If[lg2<=6,,Print[""]]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1<=6,,If[lg2<=6,,Print[MGI31=NSolve[Delete[Flatten[Table[{Part[T[n-3,0],i,j]==Part[N[Timpus[n-3,0]],i,j]},{i,1,4},{j,1,4}]],el31],Flatten[Delete[necunoscute,{{-1},{-2},{-3}}]]]]]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1<=6,,If[lg2<=6,,Print[""]]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1<=6,,If[lg2<=6,,Print["Ecuatia matriciala este: ",t[n,0]==timpus[n,0],Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]/.MGI31]]]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1<=6,,If[lg2<=6,,Print["Ecuatii eliminate: ",el32=Input["Introduceti {}, daca nu doriti sa eliminati ecuatii, sau introduceti sub forma: {{1},{2}...} pozitiile pe care le ocupa ecuatiile pe care doriti sa le eliminati din ecuatia matriciala " t[n,0]==timpus[n,0]]]]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1<=6,,If[lg2<=6,,Print[""]]]]] If[tip==PLAN,,,If[test1>=0,,If[lg1<=6,,If[lg2<=6,,Print[MGI32=NSolve[Delete[Flatten[Table[{Part[T[n,0],i,j]==Part[N[Timpus[n,0]],i,j]},{i,1,4},{j,1,4}]/.MGI31],el32],Flatten[Complement[necunoscute,Delete[necunoscute,{{-1},{-2},{-3}}]]]]]]]]]
49

1. Modelarea matematică a lanţurilor cinematice deschise folosite în structurile
mecanice ale roboţilor industriali, folosind software aplicativ
Anexa 3 Do[(i)'[t]=1,{i,1,n}] Print["vP[0]=",vP[0]=Collect[Collect[Collect[Collect[Collect[Collect[List[Part[Factor[D[rP[0],t],Trig->True],1],Part[Factor[D[rP[0],t], Trig->True],2],Part[Factor[D[rP[0],t],Trig->True],3]],q[1]'[t]],q[2]'[t]],q[3]'[t]],q[4]'[t]],q[5]'[t]],q[6]'[t]]] Do[R[i,0]=R[i-1,0].R[i,i-1],{i,2,n}] Print["wP[0]=",wP[0]={{Part[S[0]=Factor[D[R[n,0],t].Transpose[R[n,0]],Trig->True],3,2]},{Part[S[0],1,3]},{Part[S[0],2,1]}}] Print["aP[0]=",aP[0]=Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[List[Part[Factor[D[vP[0],t], Trig->True],1],Part[Factor[D[vP[0],t],Trig->True],2],Part[Factor[D[vP[0],t], Trig->True],3]],q[1]''[t]],q[2]''[t]],q[3]''[t]],q[4]''[t]],q[5]''[t]],q[6]''[t]],(q[1]'[t])^2], (q[2]'[t])^2],(q[3]'[t])^2],(q[4]'[t])^2],(q[5]'[t])^2],(q[6]'[t])^2],q[1]'[t]*q[2]'[t]],q[1]'[t]*q[3]'[t]],q[1]'[t]*q[4]'[t]],q[1]'[t]*q[5]'[t]],q[1]'[t]*q[6]'[t]],q[2]'[t]*q[3]'[t]],q[2]'[t]*q[4]'[t]],q[2]'[t]*q[5]'[t]],q[2]'[t]*q[6]'[t]],q[3]'[t]*q[4]'[t]],q[3]'[t]*q[5]'[t]],q[3]'[t]*q[6]'[t]],q[4]'[t]*q[5]'[t]],q[4]'[t]*q[6]'[t]],q[5]'[t]*q[6]'[t]]] Print["EP[0]=",EP[0]=Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[Collect[List[Part[Factor[D[wP[0],t], Trig->True],1],Part[Factor[D[wP[0],t],Trig->True],2],Part[Factor[D[wP[0],t], Trig->True],3]],q[1]''[t]],q[2]''[t]],q[3]''[t]],q[4]''[t]],q[5]''[t]],q[6]''[t]],(q[1]'[t])^2],(q[2]'[t])^2],(q[3]'[t])^2],(q[4]'[t])^2],(q[5]'[t])^2],(q[6]'[t])^2], q[1]'[t]*q[2]'[t]],q[1]'[t]*q[3]'[t]],q[1]'[t]*q[4]'[t]],q[1]'[t]*q[5]'[t]],q[1]'[t]*q[6]'[t]],q[2]'[t]*q[3]'[t]],q[2]'[t]*q[4]'[t]],q[2]'[t]*q[5]'[t]],q[2]'[t]*q[6]'[t]], q[3]'[t]*q[4]'[t]],q[3]'[t]*q[5]'[t]],q[3]'[t]*q[6]'[t]],q[4]'[t]*q[5]'[t]],q[4]'[t]*q[6]'[t]],q[5]'[t]*q[6]'[t]]] Print["Doriti sa dati valori particulare variabilelor care apar in rezultatul de mai sus? Raspundeti prin DA sau NU"] Print[p3=Input["Doriti sa dati valori particulare variabilelor care apar in rezultatul de mai sus? Raspundeti prin DA sau NU"]] If[p3==NU,,,Print[i3=Input["-MODEL CINEMATIC DIRECT:CAZ PARTICULAR- Introduceti valorile variabilelor sub forma {variabila->valoare,variabila->valoare,...}"]]] If[p3==NU,,,Print[""]] If[p3==NU,,,Print["vP[0]=",N[vP[0]/.i3]]] If[p3==NU,,,Print["wP[0]=",N[wP[0]/.i3]]] If[p3==NU,,,Print["aP[0]=",N[aP[0]/.i3]]] If[p3==NU,,,Print["EP[0]=",N[EP[0]/.i3]]] Print["errvP[0]=",Abs[N[vP[0]/.i3]-N[vP[0]/.i31]]] Print["errwP[0]=",Abs[N[wP[0]/.i3]-N[wP[0]/.i31]]] Print["erraP[0]=",Abs[N[aP[0]/.i3]-N[aP[0]/.i31]]] Print["errEP[0]=",Abs[N[EP[0]/.i3]-N[EP[0]/.i31]]]
50

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
Anexa 4 Print["MODELUL CINEMATIC INVERS"] Print[""] Print["vxPimpus[0]=",vxPimpus[0]=Input["-MODEL CINEMATIC INVERS-Introduceti"vxPimpus[0]]] Print["vyPimpus[0]=",vyPimpus[0]=Input["-MODEL CINEMATIC INVERS-Introduceti"vyPimpus[0]]] Print["vzPimpus[0]=",vzPimpus[0]=Input["-MODEL CINEMATIC INVERS-Introduceti"vzPimpus[0]]] Print["In determinarea modelului cinematic invers este necesar uneori a se impune atat vectorul viteza liniara al lui P, cat si vectorul viteza unghiulara. Este si in acest caz necesara impunerea vectorului viteza unghiulara? Se raspunde prin DA sau NU."] Print[d1=Input["In determinarea modelului cinematic invers este necesar uneori a se impune atat vectorul viteza liniara al lui P, cat si vectorul viteza unghiulara. Este si in acest caz necesara impunerea vectorului viteza unghiulara? Se raspunde prin DA sau NU."]] If[d1==DA,,,MCI1=NSolve[{Part[vP[0],1]=={vxPimpus[0]},Part[vP[0],2]=={vyPimpus[0]},Part[vP[0],3]=={vzPimpus[0]}},Table[q[i]'[t],{i,1,n}]]]; If[d1==DA,,,Part[%,1]] If[d1==DA,,,Do[q[i]'[t]=q[i]'[t]/.%,{t,0,100},{i,0,n}]] If[d1==NU,,,Print["wxPimpus[0]=",wxPimpus[0]=Input["-MODEL CINEMATIC INVERS-Introduceti"wxPimpus[0]],",wyPimpus[0]=",wyPimpus[0]=Input["-MODEL CINEMATIC INVERS-Introduceti"wyPimpus[0]],",wzPimpus[0]=",wzPimpus[0]=Input["-MODEL CINEMATIC INVERS-Introduceti"wzPimpus[0]]]] If[d1==NU,,,ecu=Input["Precizati nr. total de ecuatii care au rezultat, eliminand bineinteles identitatile, ecu="]]; If[d1==NU,,,If[ecu!=n,,MCI2=NSolve[{Part[vP[0],1]=={vxPimpus[0]},Part[vP[0],2]=={vyPimpus[0]},Part[vP[0],3]=={vzPimpus[0]},Part[wP[0],1]=={wxPimpus[0]},Part[wP[0],2]=={wyPimpus[0]},Part[wP[0],3]=={wzPimpus[0]}},Table[q[i]'[t],{i,1,n}]]]]; If[d1==NU,,,If[ecu!=n,,Part[%,1]]] If[d1==NU,,,If[ecu!=n,,Do[q[i]'[t]=q[i]'[t]/.%,{t,0,100},{i,0,n}]]] If[d1==NU,,,If[ecu<=n,,MCI3=NSolve[Delete[{Part[vP[0],1]=={vxPimpus[0]},Part[vP[0],2]=={vyPimpus[0]},Part[vP[0],3]=={vzPimpus[0]},Part[wP[0],1]=={wxPimpus[0]},Part[wP[0],2]=={wyPimpus[0]},Part[wP[0],3]=={wzPimpus[0]}},Input["Nr. de ecuatii trebuie sa fie egal cu nr. de necunoscute. In acest caz este mai mare. Precizati care sunt ecuatiile pe care le eliminati sub forma: {{1},{2},...}"]],Table[q[i]'[t],{i,1,n}]]]]; If[d1==NU,,,If[ecu<=n,,Part[%,1]]] If[d1==NU,,,If[ecu<=n,,Do[q[i]'[t]=q[i]'[t]/.%,{t,0,100},{i,0,n}]]] If[d1==NU,,,If[ecu>=n,,MCI4=NSolve[Join[{Part[vP[0],1]=={vxPimpus[0]},Part[vP[0],2]=={vyPimpus[0]},Part[vP[0],3]=={vzPimpus[0]},Part[wP[0],1]=={wxPimpus[0]},Part[wP[0],2]=={wyPimpus[0]},Part[wP[0],3]=={wzPimpus[0]}},Input["Nr. de ecuatii trebuie sa fie egal cu nr. de necunoscute. In acest caz este mai mic. Introduceti ecuatii sub forma {q[i]'[t]==v[i][t],...}, sau alte ecuatii. Nr. de ecuatii pe care trebuie sa-l introduceti este " [n-ecu]]],Table[q[i]'[t],{i,1,n}]]]]; If[d1==NU,,,If[ecu>=n,,Part[%,1]]] If[d1==NU,,,If[ecu>=n,,Do[q[i]'[t]=q[i]'[t]/.%,{t,0,100},{i,0,n}]]] Print[""]
51

1. Modelarea matematică a lanţurilor cinematice deschise folosite în structurile
mecanice ale roboţilor industriali, folosind software aplicativ
vxPimpus[0]=. vyPimpus[0]=. vzPimpus[0]=. If[d1==NU,,,wxPimpus[0]=.] If[d1==NU,,,wyPimpus[0]=.] If[d1==NU,,,wzPimpus[0]=.] Print["Doriti sa dati valori particulare variabilelor care apar in rezultatul de mai sus? Raspundeti prin DA sau NU"] Print[p4=Input["Doriti sa dati valori particulare variabilelor care apar in rezultatul de mai sus? Raspundeti prin DA sau NU"]] If[p4==NU,,,i4=Input["-MODEL CINEMATIC INVERS:CAZ PARTICULAR- Introduceti valorile variabilelor sub forma {variabila->valoare,variabila->valoare,...}"]]; If[p4==NU,,,If[d1==DA,,,Print[N[MCI1/.i4]]]] If[p4==NU,,,If[d1==NU,,,If[ecu!=n,,Print[N[MCI2/.i4]]]]] If[p4==NU,,,If[d1==NU,,,If[ecu<n,,Print[N[MCI3/.i4]]]]] If[p4==NU,,,If[d1==NU,,,If[ecu>n,,Print[N[MCI4/.i4]]]]]
52

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
Anexa 5 Do[m[i]=.,{i,1,n}]; Do[F[i][t]=.,{i,1,n}]; Do[Ixx[p]=.,{p,1,n}]; Do[Ixy[p]=.,{p,1,n}]; Do[Ixz[p]=.,{p,1,n}]; Do[Iyy[p]=.,{p,1,n}]; Do[Iyz[p]=.,{p,1,n}]; Do[Izz[p]=.,{p,1,n}]; Do[x[p]=.,{p,1,n}]; Do[y[p]=.,{p,1,n}]; Do[z[p]=.,{p,1,n}]; Do[Prod[i,j,p]=.,{i,1,n},{j,1,n},{p,1,n}]; Do[Din[i]=.,{i,1,n}]; Do[Din[i,j]=.,{i,1,n},{j,1,n}]; Do[Din[i,j,k]=.,{i,1,n},{j,1,n},{k,1,n}]; Do[F[i][t]=.,{i,1,n}]; Do[Iac[i]=.,{i,1,n}]; Do[l[i]=.,{i,1,n}]; Print["Coeficientii dinamici sunt:"] Do[{Ixx[p]=Input["MODEL DINAMIC DIRECT-Introduceti" Ixx[p]],Ixy[p]=Input["MODEL DINAMIC DIRECT-Introduceti" Ixy[p]],Ixz[p]=Input["MODEL DINAMIC DIRECT-Introduceti" Ixz[p]],Iyy[p]=Input["MODEL DINAMIC DIRECT-Introduceti" Iyy[p]],Iyz[p]=Input["MODEL DINAMIC DIRECT-Introduceti" Iyz[p]],Izz[p]=Input["MODEL DINAMIC DIRECT-Introduceti" Izz[p]],x[p]=Input["MODEL DINAMIC DIRECT-Introduceti x-ul centrului de masa" x[p]],y[p]=Input["MODEL DINAMIC DIRECT -Introduceti y-ul centrului de masa" y[p]],z[p]=Input["MODEL DINAMIC DIRECT-Introduceti z-ul centrului de masa" z[p]]},{p,1,n}] Do[J[p]={{(-Ixx[p]+Iyy[p]+Izz[p])/2,Ixy[p],Ixz[p],m[p]*x[p]},{Ixy[p],(Ixx[p]-Iyy[p]+Izz[p])/2,Iyz[p],m[p]*y[p]},{Ixz[p],Iyz[p],(Ixx[p]+Iyy[p]-Izz[p])/2,m[p]*z[p]},{m[p]*x[p],m[p]*y[p],m[p]*z[p],m[p]}},{p,1,n}] Do[Prod[i,j,p]=Factor[D[T[p,0],q[j][t]].J[p].D[Transpose[T[p,0]],q[i][t]],Trig->True],{p,1,n},{i,1,n},{j,1,n}] Do[Tra[i,j,p]=Part[Prod[i,j,p],1,1]+Part[Prod[i,j,p],2,2]+Part[Prod[i,j,p],3,3]+Part[Prod[i,j,p],4,4],{p,1,n},{i,1,n},{j,1,n}]; Do[Dr[i,j]=Expand[Sum[Tra[i,j,p],{p,Max[i,j],n}],Trig->True],{i,1,n},{j,1,n}]; Do[Print[Din[i,j]->Collect[Collect[Collect[Collect[Collect[Collect[Dr[i,j],m[1]],m[2]],m[3]],m[4]],m[5]],m[6]]],{i,1,n},{j,1,n}] Do[Din[i,j]=Collect[Collect[Collect[Collect[Collect[Collect[Dr[i,j],m[1]],m[2]],m[3]],m[4]],m[5]],m[6]],{i,1,n},{j,1,n}] Do[Prod[i,j,k,p]=Factor[D[T[p,0],q[j][t],q[k][t]].J[p].D[Transpose[T[p,0]],q[i][t]],Trig->True],{p,1,n},{i,1,n},{j,1,n},{k,1,n}]
53

1. Modelarea matematică a lanţurilor cinematice deschise folosite în structurile
mecanice ale roboţilor industriali, folosind software aplicativ
Do[Tra[i,j,k,p]=Part[Prod[i,j,k,p],1,1]+Part[Prod[i,j,k,p],2,2]+Part[Prod[i,j,k,p],3,3]+Part[Prod[i,j,k,p],4,4],{p,1,n},{i,1,n},{j,1,n},{k,1,n}]; Do[Dr[i,j,k]=Expand[Sum[Tra[i,j,k,p],{p,Max[i,j,k],n}],Trig->True],{i,1,n},{j,1,n},{k,1,n}]; Do[Print[Din[i,j,k]->Collect[Collect[Collect[Collect[Collect[Collect[Dr[i,j,k],m[1]],m[2]],m[3]],m[4]],m[5]],m[6]]],{i,1,n},{j,1,n},{k,1,n}] Do[Din[i,j,k]=Collect[Collect[Collect[Collect[Collect[Collect[Dr[i,j,k],m[1]],m[2]],m[3]],m[4]],m[5]],m[6]],{i,1,n},{j,1,n},{k,1,n}] gx[0]=Input["Introduceti componenta pe axa x a acceleratiei gravitationale in raport cu sistemul de referinta fix, gx[0]="]; gy[0]=Input["Introduceti componenta pe axa y a acceleratiei gravitationale in raport cu sistemul de referinta fix, gy[0]="]; gz[0]=Input["Introduceti componenta pe axa z a acceleratiei gravitationale in raport cu sistemul de referinta fix, gz[0]="]; Do[Dr[i]=Sum[-m[p]*Transpose[{{gx[0]},{gy[0]},{gz[0]},{1}}].D[T[p,0],q[i][t]].{{x[p]},{y[p]},{z[p]},{1}},{p,i,n}],{i,1,n}] Do[Print[Din[i]->Collect[Collect[Collect[Collect[Collect[Collect[Factor[Part[Dr[i],1,1],Trig->True],m[1]],m[2]],m[3]],m[4]],m[5]],m[6]]],{i,1,n}] Do[Din[i]=Collect[Collect[Collect[Collect[Collect[Collect[Factor[Part[Dr[i],1,1],Trig->True],m[1]],m[2]],m[3]],m[4]],m[5]],m[6]],{i,1,n}] Do[Iac[i]=Input["Introduceti inertia sistemului de actionare din cuple" Iac[i]],{i,1,n}] Do[Print[F[i][t]->Sum[Din[i,j]*q[j]''[t],{j,1,n}]+Iac[i]*q[i]''[t]+Sum[Din[i,j,k]*q[j]'[t]*q[k]'[t],{j,1,n},{k,1,n}]+Din[i]],{i,1,n}] Do[F[i][t]=Sum[Collect[Din[i,j]*q[j]''[t],q[j]''[t]],{j,1,n}]+Iac[i]*q[i]''[t]+Sum[Din[i,j,k]*q[j]'[t]*q[k]'[t],{j,1,n},{k,1,n}]+Din[i],{i,1,n}] Print["Doriti sa dati valori particulare variabilelor care apar in rezultatul de mai sus? Raspundeti prin DA sau NU"] Print[p5=Input["Doriti sa dati valori particulare variabilelor care apar in rezultatul de mai sus? Raspundeti prin DA sau NU"]] If[p5==NU,,,p=Input["-MODEL DINAMIC DIRECT:CAZ PARTICULAR- Introduceti valorile variabilelor sub forma {variabila->valoare,variabila->valoare,...}"]]; If[p5==NU,,,Do[Print[f[i][t]->N[F[i][t]]/.N[p]],{i,1,n}]]
54

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
Anexa 6 If[d1==NU,,,If[ecu>n,,Input["Daca la MCI ati introdus ecuatii sub forma {q[i]'[t]==v[i][t],...}, atunci introduceti conditiile initiale corespunzatoare acestor variabile sub forma: {v[i][0]=cifra,...}, daca nu, introduceti {}"]]]; g=9.8; Do[m[i]=.,{i,1,n}] Do[m[i]=Input["Introduceti masele elementelor" m[i]],{i,1,n}] Do[Fimpus[i][t]=.,{i,1,n}] forte=Table[F[i][t]==Input["Introduceti" Fimpus[i][t]]/.{q[1]->Q1,q[2]->Q2,q[3]->Q3,q[4]->Q4,q[5]->Q5,q[6]->Q6,q[7]->Q7,q[8]->Q8,q[9]->Q9,q[10]->Q10,q[11]->Q11,q[12]->Q12,q[13]->Q13,q[14]->Q14,q[15]->Q15},{i,1,n}] Do[q[i][0]=.,{i,1,n}] Do[N[q[i]][0]=Input["Introduceti conditiile initiale" q[i][0]],{i,1,n}] cond=Table[Q[i][0]==N[q[i]][0]/.{Q[1]->Q1,Q[2]->Q2,Q[3]->Q3,Q[4]->Q4,Q[5]->Q5,Q[6]->Q6,Q[7]->Q7,Q[8]->Q8,Q[9]->Q9,Q[10]->Q10,Q[11]->Q11,Q[12]->Q12,Q[13]->Q13,Q[14]->Q14,Q[15]->Q15},{i,1,n}] cond1=Table[Q[i]'[0]==q[i]'[0]/.{Q[1]->Q1,Q[2]->Q2,Q[3]->Q3,Q[4]->Q4,Q[5]->Q5,Q[6]->Q6,Q[7]->Q7,Q[8]->Q8,Q[9]->Q9,Q[10]->Q10,Q[11]->Q11,Q[12]->Q12,Q[13]->Q13,Q[14]->Q14,Q[15]->Q15},{i,1,n}] rez=NDSolve[Join[forte,cond1,cond],Table[Q[i]/.{Q[1]->Q1,Q[2]->Q2,Q[3]->Q3,Q[4]->Q4,Q[5]->Q5,Q[6]->Q6,Q[7]->Q7,Q[8]->Q8,Q[9]->Q9,Q[10]->Q10,Q[11]->Q11,Q[12]->Q12,Q[13]->Q13,Q[14]->Q14,Q[15]->Q15},{i,1,n}],{t,ti=Input["Introduceti valoarea initiala a timpului, ti"],tf=Input["Introduceti valoarea finala a timpului, tf"]}] gr=Plot[Evaluate[Table[Q[i][t]/.{Q[1]->Q1,Q[2]->Q2,Q[3]->Q3,Q[4]->Q4,Q[5]->Q5,Q[6]->Q6,Q[7]->Q7,Q[8]->Q8,Q[9]->Q9,Q[10]->Q10,Q[11]->Q11,Q[12]->Q12,Q[13]->Q13,Q[14]->Q14,Q[15]->Q15},{i,1,n}]/.%],{t,ti,tf},Frame->True,GridLines->Automatic] t0=Input["Pentru a identifica graficele, trebuie sa cunoasteti valorile variabilelor la un moment de timp, t0. Introduceti t0"] Table[Q0[i][t0]->Q[i][t0]/.{Q[1]->Q1,Q[2]->Q2,Q[3]->Q3,Q[4]->Q4,Q[5]->Q5,Q[6]->Q6,Q[7]->Q7,Q[8]->Q8,Q[9]->Q9,Q[10]->Q10,Q[11]->Q11,Q[12]->Q12,Q[13]->Q13,Q[14]->Q14,Q[15]->Q15}/.rez,{i,1,n}] p6=Input["Doriti sa vizualizati de aproape portiunea din grafic ce are pe abscisa intervalul tmin...tmax si pe ordonata intervalul Qmin...Qmax? Raspundeti prin DA sau NU."] If[p6==NU,,,Show[gr,PlotRange->{{Input["Introduceti valoarea lui tmin"],Input["Introduceti valoarea lui tmax"]},{Input["Introduceti valoarea lui Qmin"],Input["Introduceti valoarea lui Qmax"]}}]] rez=NDSolve[Join[forte,cond1,cond],Table[Q[i]/.{Q[1]->Q1,Q[2]->Q2,Q[3]->Q3,Q[4]->Q4,Q[5]->Q5,Q[6]->Q6,Q[7]->Q7,Q[8]->Q8,Q[9]->Q9,Q[10]->Q10,Q[11]->Q11,Q[12]->Q12,Q[13]->Q13,Q[14]->Q14,Q[15]->Q15},{i,1,n}],{t,ti=Input["Introduceti valoarea initiala a timpului, ti"],tf=Input["Introduceti valoarea finala a timpului, tf"]}] gr=Plot[Evaluate[Table[Q[i][t]/.{Q[1]->Q1,Q[2]->Q2,Q[3]->Q3,Q[4]->Q4,Q[5]->Q5,Q[6]->Q6,Q[7]->Q7,Q[8]->Q8,Q[9]->Q9,Q[10]->Q10,Q[11]->Q11,Q[12]->Q12,Q[13]->Q13,Q[14]->Q14,Q[15]->Q15},{i,1,n}]/.%],{t,ti,tf},Frame->True,GridLines->Automatic]
55

1. Modelarea matematică a lanţurilor cinematice deschise folosite în structurile
mecanice ale roboţilor industriali, folosind software aplicativ
t0=Input["Pentru a identifica graficele, trebuie sa cunoasteti valorile variabilelor la un moment de timp, t0. Introduceti t0"] Table[Q0[i][t0]->Q[i][t0]/.{Q[1]->Q1,Q[2]->Q2,Q[3]->Q3,Q[4]->Q4,Q[5]->Q5,Q[6]->Q6,Q[7]->Q7,Q[8]->Q8,Q[9]->Q9,Q[10]->Q10,Q[11]->Q11,Q[12]->Q12,Q[13]->Q13,Q[14]->Q14,Q[15]->Q15}/.rez,{i,1,n}] p6=Input["Doriti sa vizualizati de aproape portiunea din grafic ce are pe abscisa intervalul tmin...tmax si pe ordonata intervalul Qmin...Qmax? Raspundeti prin DA sau NU."] If[p6==NU,,,Show[gr,PlotRange->{{Input["Introduceti valoarea lui tmin"],Input["Introduceti valoarea lui tmax"]},{Input["Introduceti valoarea lui Qmin"],Input["Introduceti valoarea lui Qmax"]}}]] Do[m[i]=.,{i,1,n}] Do[m[i]=Input["Introduceti masele elementelor" m[i]],{i,1,n}] Do[q[i][0]=.,{i,1,n}] Do[q[i][0]=Input["Introduceti conditiile initiale" q[i][0]],{i,1,n}] cond=Table[Q[i][0]==N[q[i][0]]/.{Q[1]->Q1,Q[2]->Q2,Q[3]->Q3,Q[4]->Q4,Q[5]->Q5,Q[6]->Q6,Q[7]->Q7,Q[8]->Q8,Q[9]->Q9,Q[10]->Q10, Q[11]->Q11,Q[12]->Q12,Q[13]->Q13,Q[14]->Q14,Q[15]->Q15},{i,1,n}] cond1=Table[Q[i]'[0]==N[q[i]'[0]]/.{Q[1]->Q1,Q[2]->Q2,Q[3]->Q3,Q[4]->Q4,Q[5]->Q5,Q[6]->Q6,Q[7]->Q7,Q[8]->Q8,Q[9]->Q9,Q[10]->Q10,Q[11]->Q11,Q[12]->Q12,Q[13]->Q13,Q[14]->Q14,Q[15]->Q15},{i,1,n}] rez=NDSolve[Join[forte,cond1,cond],Table[Q[i]/.{Q[1]->Q1,Q[2]->Q2,Q[3]->Q3,Q[4]->Q4,Q[5]->Q5,Q[6]->Q6,Q[7]->Q7,Q[8]->Q8,Q[9]->Q9,Q[10]->Q10,Q[11]->Q11,Q[12]->Q12,Q[13]->Q13,Q[14]->Q14,Q[15]->Q15},{i,1,n}],{t,ti=Input["Introduceti valoarea initiala a timpului, ti"],tf=Input["Introduceti valoarea finala a timpului, tf"]}] gr=Plot[Evaluate[Table[Q[i][t]/.{Q[1]->Q1,Q[2]->Q2,Q[3]->Q3,Q[4]->Q4,Q[5]->Q5,Q[6]->Q6,Q[7]->Q7,Q[8]->Q8,Q[9]->Q9,Q[10]->Q10, Q[11]->Q11 rez=NDSolve[Join[forte,cond1,cond],Table[Q[i]/.{Q[1]->Q1,Q[2]->Q2,Q[3]->Q3,Q[4]->Q4,Q[5]->Q5,Q[6]->Q6,Q[7]->Q7,Q[8]->Q8,Q[9]->Q9,Q[10]->Q10,Q[11]->Q11,Q[12]->Q12,Q[13]->Q13,Q[14]->Q14,Q[15]->Q15},{i,1,n}],{t,ti=Input["Introduceti valoarea initiala a timpului, ti"],tf=Input["Introduceti valoarea finala a timpului, tf"]}] gr=Plot[Evaluate[Table[Q[i][t]/.{Q[1]->Q1,Q[2]->Q2,Q[3]->Q3,Q[4]->Q4,Q[5]->Q5,Q[6]->Q6,Q[7]->Q7,Q[8]->Q8,Q[9]->Q9,Q[10]->Q10, Q[11]->Q11,Q[12]->Q12,Q[13]->Q13,Q[14]->Q14,Q[15]->Q15},{i,1,n}]/.%],{t,ti,tf},Frame->True,GridLines->Automatic] t0=Input["Pentru a identifica graficele, trebuie sa cunoasteti valorile variabilelor la un moment de timp, t0. Introduceti t0"] Table[Q0[i][t0]->Q[i][t0]/.{Q[1]->Q1,Q[2]->Q2,Q[3]->Q3,Q[4]->Q4,Q[5]->Q5,Q[6]->Q6,Q[7]->Q7,Q[8]->Q8,Q[9]->Q9,Q[10]->Q10, Q[11]->Q11,Q[12]->Q12,Q[13]->Q13,Q[14]->Q14,Q[15]->Q15}/.rez,{i,1,n}] p6=Input["Doriti sa vizualizati de aproape portiunea din grafic ce are pe abscisa intervalul tmin...tmax si pe ordonata intervalul Qmin...Qmax? Raspundeti prin DA sau NU."] If[p6==NU,,,Show[gr,PlotRange->{{Input["Introduceti valoarea lui tmin"],Input["Introduceti valoarea lui tmax"]},{Input["Introduceti valoarea lui Qmin"],Input["Introduceti valoarea lui Qmax"]}}]]
56

Analiza cinematică şi cinetostatică a sistemelor de corpuri, folosind
sofware specializat
2

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
2.1. Aspecte generale
Câteva dintre cele mai uzuale software, de nivel european, specializate în analiza cinematică şi cinetostatică a structurilor mecanice tridimensionale, sunt: Meca3D, care rulează sub platforma de modelare tridimensională SolidWorks, CosmosMotion, care rulează, de asemenea, sub platforma SolidWorks, MotionInventor, care rulează sub platforma de modelare tridimensională Inventor.
Aceste 3 software se constituie ca module ale platformelor de modelare amintite şi se pot instala separat de acestea. Odată instalate, ele apar ca meniuri în cadrul acestor platforme.
2.2. Meca3D pentru SolidWorks
Meca3D este un software destinat analizei mecanismelor spaţiale, sub trei
aspecte: geometric, cinematic, cinetostatic. El conţine trei module: modulul grafic, modulul de analiză numerică şi
modulul de rezultate. Obiectivul acestui software constă în simularea mecanismelor în faza de concepţie a acestora, precum şi în testarea performanţelor şi a proprietăţilor mecanismelor existente. Se pot aborda diverse soluţii constructive de mecanisme, care să satisfacă cerinţele impuse de tema de proiectare, determinându-se pentru fiecare dintre ele eforturile din cuple, precum şi distribuţia de viteze şi acceleraţii. Aceste informaţii sunt necesare pentru stabilirea elementelor tehnologice folosite pentru materializarea cuplelor cinematice şi pentru stabilirea dimensiunilor acestora (rulmenţi, ghidaje, angrenaje etc.). Cunoaşterea precisă a eforturilor la care sunt supuse elementele este necesară pentru stabilirea deformaţiilor şi a tensiunilor la care acestea vor fi supuse.
2.2.1. Modul de lucru
Modul de lucru cu acest software este ilustrat pe cazul particular al unui mecanism spaţial manivelă culisă (fig. 2.1). • Se modelează în SolidWorks elementele mecanismului, în fişiere de tip part • Se asamblează elementele, într-un fişier SolidWorks de tip ansamblu • Se apelează Meca3D
57

2. Analiza cinematică şi cinetostatică a sistemelor de corpuri, folosind software specializat
Rezultatele furnizate de software Meca3D sunt raportate, opţional, fie la sistemele de referinţă locale, ataşate elementelor mecanismului fie la sistemul de referinţă global, fix. De aceea, din momentul în care se construieşte part-ul batiului, se va ţine seama ca sistemul de referinţă ataşat lui să aibă poziţia corespunzătoare, pentru ca ulterior să devină sistem global. Când începe construcţia fişierului de ansamblu, primul element care trebuie adus este baza (batiul). Dacă acest element a fost construit ţinând cont de precizarea de mai sus, atunci el va fi inserat în originea origin din fişierul de ansamblu. În acest fel, sistemul de referinţă al bazei va deveni sistem de referinţă global. Dacă acest element (baza) nu a fost construit conform precizărilor de mai sus, atunci nu se va insera în origine, ci într-un punct oarecare. Pentru a aduce originea origin într-un punct dorit, cu scopul de a deveni originea sistemului global, se foloseşte comanda mate din SolidWorks. Fig. 2.1
Dacă axele sistemului general mai trebuie orientate, atunci se foloseşte comanda mate între Front plane, Top plane, respectiv Right plane şi diverse plane ale bazei. Pentru aceasta, baza trebuie să aibă atributul Float.
De asemenea, contează poziţia de zero a mecanismului, adică poziţia în care primul element mobil (următorul după bază) se introduce în desen. Această poziţie va fi fixată tot prin mate între plane. Meca3D ataşează în mod automat câte un sistem de referinţă fiecărui element al mecanismului, inserând-ul în centrul de masă al acestuia, şi câte un sistem de referinţă fiecărei legături. În program, sistemele ataşate elementelor sunt colorate în albastru, iar cele ataşate legăturilor în roşu.
58

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
Axele se identifică astfel: axa x are o săgeată, axa y are două săgeţi, iar axa z are trei săgeţi. După aceste setări, se apelează Meca3D. Există 2 posibilităţi: • Se optează pentru interpretarea automată de către Meca3D a întregului mecanism, construit în SolidWorks • Se aduc rând pe rând fiecare piesă şi fiecare legătură, pentru a fi „văzute şi interpretate” de Meca3D. În varianta 1, se procedeză astfel (fig. 2.2): Fig. 2.2 Se face clic dreapta pe cuvântul piese din structura arborescentă şi de acolo se selecteză Conversion automatique. În acest moment, piesele sunt “văzute şi interpretate“ de Meca3D. Analog, pentru ca legăturile să fie văzute în mod automat, se activează Construction automatique (fig. 2.3). În varianta a doua, se procedeză astfel (fig. 2.4): Se face clic dreapta pe cuvântul piese din structura arborescentă, se apelează comanda Ajouter şi se selectează din desen piesa ce se doreşte a fi “văzută“ de Meca3D. Se repetă operaţia pentru toate piesele mecanismului.
59

2. Analiza cinematică şi cinetostatică a sistemelor de corpuri, folosind software specializat
Fig. 2.3
Fig. 2.4
60

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
Se procedează analog şi pentru legăturile mecanismului: se face clic dreapta pe cuvântul legături din structura arborescentă, se apelează comanda Ajouter şi se selectează din desen legătura ce se doreşte a fi “văzută“ de Meca3D. După ce toate piesele şi toate legăturile au fost “aduse“ în Meca3D, structura arborescentă apare ca în fig. 2.5. În continuare, se apelează graful structurii, cu clic dreapta pe Analyse pentru a verifica dacă mecanismul este înţeles în mod corect de Meca3D. Se obţine rezultatul din fig. 2.6.
2
3
1
baz
Fig. 2.5
Fig. 2.6
61

2. Analiza cinematică şi cinetostatică a sistemelor de corpuri, folosind software specializat
Pentru a calcula gradul de mobilitate al mecanismului, se apelează comanda Calcul mecanique (fig.2.7) Mecanismul este analizat din punct de vedere static şi cinematic şi se raportează următorul rezultat (fig. 2.8). Se selectează tipul de studiu ce se doreşte a fi efectuat (se alege studiul geometric), se activează butonul Calcul şi apoi butonul Fin. Proprietăţile fiecărui element se pot apela ca în fig.2.9. Sunt afişate: coordonatele centrului de masă al elementului, faţă de sistemul global, masa elementului, momentele de inerţie axiale şi centrifugale (fig. 2.10). Fig. 2.7
Fig. 2.8
62

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
Fig. 2.9
0
Fig. 2.1
63

2. Analiza cinematică şi cinetostatică a sistemelor de corpuri, folosind software specializat
Fig. 2.11 Proprietăţile elementului se pot modifica apelând butonul Modifier: se modifică masa elementului, poziţia şi orientarea axelor sistemului local etc. Analog se pot determina şi modifica legăturile (fig. 2.11) şi proprietăţile acestora. Pentru a simula o mişcare, se selectează opţiunea Analyse din structura arborescentă şi comanda Calcul mecanique cu ajutorul căreia se impun parametrii de mişcare. După aceea, din opţiunea Resultates, se selectează Simulation (fig. 2.12). Programul permite afişarea traiectoriilor centrelor de masă ale elementelor, precum şi afişarea curbelor de poziţie, viteză, acceleraţie, reacţiuni din cuple sub formă de curbe simple, curbe parametrice, ori curbe multiple (fig. 2.13). Opţiunea Curbe simple permite realizarea graficelor paramerilor selectaţi, în funcţie de timp (intervalul de timp este cel setat la Analyse – Calcul mecanique). Opţiunea Curbe parametrice permite realizarea graficului unui parametru în funcţie de alt parametru. Opţiunea Curbe multiple permite înscrierea mai multor curbe în acelaşi grafic. Spre exemplu, pentru a afişa graficul deplasării unghiulare din cupla cilindrică plană dintre elementul 1 şi bază, în funcţie de timp, se alege opţiunea Curbe
64

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
simple, se selectează cu clic dreapta legătura pivot1 din arborele structural şi se setează (fig. 2.14) tipul de rezultat şi tipul de componentă (unghiulară) pentru care se solicită graficul. Fig. 2.12 Fig. 2.13
65

2. Analiza cinematică şi cinetostatică a sistemelor de corpuri, folosind software specializat
66
Fig. 2.14
Fig. 2.15

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
Graficul lui a1 pentru poziţia 0-10s este de fapt legea de mişcare a manivelei, adică φ(t) în notaţia consacrată, numai că Meca3D atribuie notaţiile în mod implicit, fără ca utilizatorul să le poată modifica. Poziţia de zero a manivelei este considerată cea indicată în fig. 2.14, în care manivela se află în prelungirea axei z a sistemului ataşat cuplei pivot1, iar sensul pozitiv de rotaţie al manivelei este spre dreapta, adică în sensul pozitiv ale axei x a sistemului. Se obţine graficul din figura 2.15, în care a1 reprezintă deplasarea unghiulară în jurul axei x, a2 reprezintă deplasarea unghiulară în jurul axei y, iar a3 reprezintă deplasarea unghiulară în jurul axei z. Este vorba despre axele x, y, z ale sistemului de referinţă ataşat cuplei pivot1. Se observă în figura 2.14 că aceste axe sunt dispuse astfel: axa x este axa de rotaţie şi are o săgeată, axa y este orientată spre dreapta şi are 2 săgeţi, iar axa z este orientată în jos şi are 3 săgeţi. În program, acest sistem de referinţă are culoarea roşie.
Fig. 2.16 Analog, se determină (fig. 2.16) graficul deplasării liniare pe axa x a elementului 3 (numerotarea elementelor se vede în fig. 2.5) în funcţie de timp. Se face precizarea că d1 este deplasarea elementului 3 pe axa x, d2 este deplasarea pe axa y, iar d3 pe axa z, relativ la axele sistemului de referinţă situat în centrul de greutate al elementului 3.
67

2. Analiza cinematică şi cinetostatică a sistemelor de corpuri, folosind software specializat
Pentru a stabili legea de mişcare a mecanismului, trebuie să se determine graficul deplasării elementului 3, în funcţie de deplasarea unghiulară a elementului 1. Pentru aceasta, se optează pentru Curbe parametrice şi se setează cele două componente ale graficului. Rezultatul este evidenţiat în fig. 2.17, în care pe abscisă este deplasarea unghiulară a manivelei, a1, exprimată în grade, în jurul axei x (a sistemului ataşat cuplei pivot1) iar pe ordonată deplasarea liniară a elementului 3, d1, exprimată în mm, pe axa x (a sistemului ataşat elementului 3). Dacă se impune calculul pentru un interval mai larg de valori ale unghiului la manivelă, de la -600 la 600 (fig. 2.18), se poate observa că momentul coliziunii elementului 3 cu baza este în jurul valorii de 520 la manivelă (fig. 2.19).
d1(≡s3)
a1(≡φ1))
Fig. 2.17 Pentru a avea în acelaşi grafic deplasarea unghiulară la manivelă şi deplasarea liniară a elementului 3, se optează pentru Curbe multiple, se setează componentele graficului (fig. 2.20) şi se obţin curbele din fig. 2.21. În fig. 2.22 este ilustrat modul de lucru pentru determinarea graficului vitezei liniare a centrului de masă al elementului 1. După efectuarea acestor setări, programul permite ca utilizatorul să aleagă componenta vitezei pentru care se doreşte graficul (fig. 7.23).
68

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
Fig. 2.18 Fig. 2.19
69

2. Analiza cinematică şi cinetostatică a sistemelor de corpuri, folosind software specializat
Fig. 2.20
Fig. 2.21
70

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
Fig. 2.22
Fig. 2.23 - Folosind succesiunea Clic dreapta Analyse – Calcul mécanique, se imprimă pivotului 1 o turaţie de -60 rot/min (fig. 2.24). Unitatea de măsură este [rot/min].
71

2. Analiza cinematică şi cinetostatică a sistemelor de corpuri, folosind software specializat
2.2.2. Determinarea legii de mişcare a elementului condus la mecanismul patrulater În studiul mecanismului patrulater (fig. 2.24), este important de determinat legea de mişcare a elementului condus. Pentru aceasta, se parcurg următoarele etape: - Se stabileşte poziţia zero a manivelei (fig. 2.24), cu Move Component stabilită în mod implicit de program. Ţinând cont de relaţia
60minrotnπ2
sradω
⎥⎦⎤
⎢⎣⎡
=⎥⎦⎤
⎢⎣⎡ , înseamnă că viteza imprimată manivelei este de
2π[rad/s]. Cum durata imprimată mişcării este de 1 s, înseamnă că unghiul descris de manivelă este φ = ω ◦ t = 2π rad/s ◦ 1 s = 2π rad. Numărul de poziţii (cadre) în care este simulată mişcarea este 50. Observaţie: Dacă s-ar fi imprimat cuplei Pivot 1 o turaţie de 60 rot/min, atunci manivela s-ar fi rotit spre dreapta, deoarece sensul de mişcare, pe care programul îl setează în mod implicit, este sensul pozitiv al axei în jurul căreia se produce rotaţia, din sistemul de referinţă ataşat cuplei (în cazul de faţă axa este x, marcată cu o singură săgeată). Pentru ca manivela să se rotească spre stânga, a fost necesară introducerea semnului minus în faţa valorii turaţiei. - Se apelează Résultats – Courbes – Unités, pentru a seta unităţile de măsură (fig. 2.25) în care să fie afişate rezultatele.
Pivot 1
Elementul condus Poziţia zero a manivelei
Fig. 2.24
72

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
- Se apelează Résultats – Simulation – Animer (fig. 2.26) Fig. 2.25
Fig. 2.26 Unghiul φ descris de manivelă şi unghiul ψ descris de elementul condus sunt reprezentate în fig. 2.27. - Folosind Résultats – Courbes – Simples – Consulter , se solicită mai întâi curba de variaţie în timp a unghiului la cupla Pivot 1 (cupla motoare) şi apoi la cupla Pivot 4, aşa cum se indică în fig. 2.28. Se obţine reprezentarea grafică a legii de mişcare a manivelei (fig.2.29 – φ[grade], t[s]) şi a legii de mişcare a elementului condus (fig.2.30 - ψ[grade], t[s]). Observaţie: În program, tabul a1(deg) desemnează rotaţia în jurul axei x, tabul a2(deg) desemnează rotaţia în jurul axei y, iar tabul a3(deg) desemnează rotaţia în jurul axei z a sistemului de referinţă ataşat cuplei (desenat cu roşu în program). Unghiul de rotaţie φ la manivelă, respectiv ψ la elementul condus se află în
73

2. Analiza cinematică şi cinetostatică a sistemelor de corpuri, folosind software specializat
program sub tabul a1(deg), deoarece rotaţia în cuplele Pivot 1, respectiv Pivot 4 are loc în jurul axei x a sistemelor ataşate acestor cuple. Pentru a determina legea de mişcare a elementului condus, funcţie de mişcarea manivelei, adică graficul ψ = ψ(φ) , se apelează Résultats – Courbes – Paramétrées
Poziţia zero a manivelei φ
Fig. 2.28
Pivot 1
Pivot 4
ψ
Poziţia iniţială a elementului condus Fig. 2.27
74

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
t
φ
Fig. 2.29
ψ
t
Fig. 2.30
75

2. Analiza cinematică şi cinetostatică a sistemelor de corpuri, folosind software specializat
– Consulter şi se fac setările prezentate în fig.2.31. Se obţine legea de mişcare prezentată în fig. 2.32.
Fig. 2.31
φ
ψ
Fig. 2.32
76

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
2.3. COSMOSMOTION pentru SolidWorks CosmosMotion este un software de analiză cinematică a sistemelor mecanice. Integrat în interfaţa SolidWorks şi destinat simulării sistemelor mecanice ca prototipuri virtuale, el permite: • creşterea eficienţei procesului de proiectare, uzând de facilitatea de simulare a sistemelor mecanice, oferită de mediul de modelare SolidWorks • definirea parametrilor mişcării mecanismelor, simularea mişcării şi îmbunătăţirea rezultatelor, reiterând etapele proiectării, totul în aceeaşi interfaţă SolidWorks • accelerarea procesului de proiectare, prin reducerea costurilor iteraţiilor de modificare a proiectului • eliminarea costurilor de refabricare, cauzate de modificări în proiect • simularea mişcării mecanismelor, sesizarea eventualelor coliziuni şi corectarea greşelilor, înainte de a realiza prototipul fizic • calculul reacţiunilor din legături, necesare pentru a defini cazurile de încărcare în vederea efectuării calculului la rezistenţă al structurii
2.3.1. Modul de lucru
Modul de lucru cu acest software este ilustrat pentru cazul particular al unui mecanism patrulater: Se modelează în SolidWorks elementele mecanismului, în fişiere de tip part Se asamblează elementele, într-un fişier SolidWorks de tip assembly În fişierul assembly, se apelează instrumentul corespunzător meniului Motion (fig. 2.33) Arborele structural din partea stângă a ferestrei de lucru indică următoarele module (fig. 2.33): Parts, Constraints, Forces, Results. Modulul Parts conţine elementele cinematice ale mecanismului, fixe şi mobile; modulul Constraints este modulul constrângerilor impuse mecanismului; modulul Forces grupează forţele şi momentele ce acţionează asupra mecanismului, iar modulul Results este modulul rezultatelor. Elementele cinematice ale mecanismului sunt grupate în 2 categorii: Moving Parts – elemente mobile şi Ground Parts – elemente fixe. Pentru a defini batiul ca element fix, se face clic dreapta pe numele acestuia şi se selectează opţiunea GroundPart (fig. 2.34). Dacă desenul este corect realizat în SolidWorks, legăturile vor fi corect interpretate de CosmosMotion. Pentru a afişa lista legăturilor mecanismului, se face clic pe semnul + din faţa cuvântului Joints din modulul Constraints. Tipurile de legături predefinite în CosmosMotion se găsesc în meniul Motion – Joints şi sunt ilustrate în fig. 2.36. Programul ataşează în mod automat sisteme de referinţă, desenate cu culoarea roşie cuplelor şi sisteme de referinţă, desenate cu culoarea albastră, elementelor, pe care le pune în centrele de greutate ale acestora.
77

2. Analiza cinematică şi cinetostatică a sistemelor de corpuri, folosind software specializat
Fig. 2.33 Poziţia zero a elementului conducător se stabileşte prin mutarea respectivului element cu Move Component. Se fixează elementul în poziţia care trebuie să fie poziţia zero şi se fac setările prezentate în cele ce urmează. Pentru exemplificarea unei simulări, se propune imprimarea unei mişcări de rotaţie cu viteză constantă de 60 grade/s în cupla Revolute. Pentru aceasta, se procedează astfel: clic dreapta pe cuvântul Revolute – Properties – Motion, iar în fereastra Edit User Defined Joint se fac setările din fig. 2.35. Se închide fereastra cu butonul Apply. Deplasarea unghiulară a manivelei reprezintă produsul dintre viteza unghiulară setată şi timpul de mişcare φ = ω t. Timpul se setează cu comanda IntelliMotion Builder – Simulation – Duration, fig. 2.37. Pentru a simula această mişcare de rotaţie, se apelează comanda Simulate din meniul Motion. Dacă se doreşte inversarea sensului de rotaţie al manivelei, se pune semnul minus în faţa valorii de 60 grade/s a vitezei unghiulare (fig. 2.35). Marcarea traiectoriei centrului de greutate al unui element, se face prin apelarea Trace Path – Create Trace Path din modulul Results. Se selectează elementul a cărui traiectorie se doreşte.
78

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
Fig. 2.35 Pentru a verifica faptul că viteza unghiulară în cupla motoare este de 60 grade/s, se procedează astfel: clic dreapta pe Revolute – Plot – Angular Velocity – Z Component fig. 2.38. Se obţine următorul răspunsul din fig. 2.39. În mod analog, se determină viteza unghiulară din celelalte cuple (fig. 2.40). Aceste grafice sunt evidenţiate în modulul Results – XY Plots.
Fig. 2.34
Ele se pot şterge cu clic dreapta pe numele graficului şi comanda Delete. O nouă simulare a mişcării se poate face numai după ce se apelează meniul Motion – Delete Results. Dacă se doreşte setarea unei noi poziţii zero pentru elementul conducător, după Motion – Delete Results, se apelează din nou Move Component şi se fixează
elementul într-o nouă poziţie.
79

2. Analiza cinematică şi cinetostatică a sistemelor de corpuri, folosind software specializat
.
Fig. 2.36
Fig. 2.37
80

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
Fig. 2.38 Fig. 2.39 În fig. 2.41 este ilustrată succesiunea de setări în cadrul meniului derulant ce permite determinarea vitezei unghiulare a manivelei. Stabilirea componentelor vitezei liniare a centrului de masă al manivelei este prezentată în fig. 2.42.
81

2. Analiza cinematică şi cinetostatică a sistemelor de corpuri, folosind software specializat
82
Printr-un procedeu similar, se poate determina acceleraţia unghiulară a fiecărui element cinematic, precum şi componentele acceleraţiei liniare a centrului de masă a fiecărui element. În scopul definirii forţelor exterioare ce acţionează asupra structurii, se apelează mai întâi comanda Delete Results din meniul Motion. Pentru a simula acţiunea unui arc asupra elementului balansier: modulul Forces - clic dreapta pe Springs – Add Linear Spring – se selectează balansierul şi apoi batiul (fig. 2.43). În fereastra Insert Spring se stabileşte rigiditatea arcului, forţa din arc, diametrul arcului, numărul de spire, diametrul sârmei. În vederea efectuării analizei cinetostatice a mecanismului, se realizează o simulare a mişcării: meniul Motion – Simulate. Pentru determinarea reacţiunilor din legături: clic drepta pe numele legăturii – Plot – Reaction Force, fig. 2.44. Ştergerea unui grafic de pe ecran: la secţiunea XY Plots – clic dreapta pe numele graficului - Delete. Determinarea momentului motor la manivelă: clic drepta pe cuvântul manivelă din secţiunea Moving Parts – Plot – Angular Momentum about CM, fig. 2.45.
Fig. 2.40

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
Fig. 2.41
Fig. 2.42
83

2. Analiza cinematică şi cinetostatică a sistemelor de corpuri, folosind software specializat
Fig. 2.43
Fig. 2.44
84

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
Fig. 2.45
2.3.2. Determinarea legii de mişcare a elementului condus la mecanismul patrulater
În studiul mecanismului patrulater, este important de determinat legea de
mişcare a elementului condus. Pentru aceasta, se propune studiul mişcării elementului condus, (fig.2.46), pentru două intervale (0, 1800) şi (1800, 3600) ale unghiului la manivelă. Pentru intervalul (0, 1800), se parcurg următoarele etape: - Se setează poziţia zero a manivelei (cu Move Component), ca în fig. 2.46 - Se imprimă mişcare (clic dreapta – Properties) în cupla Revolute, cu parametrii indicaţi în fig. 2.46. Sensul de rotaţie al manivelei, pe care programul îl alege în mod implicit este sensul pozitiv al axei z a sistemului de referinţă global, aflat în partea stângă a ecranului. - Se setează la IntelliMotion – Builder la tabul Simulation - Duration 1 secundă şi numărul de cadre 50 - Se apelează Motion – Simulate Unghiul φ descris de manivelă şi unghiul ψ descris de elementul condus sunt prezentate în fig. 2.46. - Se solicită mai întâi curba de variaţie în timp a unghiului la cupla Revolute (cupla motoare) şi apoi la cupla Revolute 4, aşa cum se indică în fig. 2.48.
85

2. Analiza cinematică şi cinetostatică a sistemelor de corpuri, folosind software specializat
Elementul condus
Revolute
Revolute4 Poziţia zero a manivelei
Fig. 2.46
Poziţia iniţială a elementului condus, corespunzătoare poziţiei zero a manivelei
Poziţia zero a manivelei φ ψ
Fig. 2.47
86

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
Fig. 2.48
ψ
t
Fig. 2.49 Prin urmare, legea de mişcare în timp, ψ = ψ(t), a elementului condus, pentru intervalul (00,1800) al unghiului la manivelă, adică legea de variaţie în timp a unghiului în cupla Revolute 4 are forma din fig. 2.49 (ψ [grade] funcţie de t[s]).
87

2. Analiza cinematică şi cinetostatică a sistemelor de corpuri, folosind software specializat
În mod analog se procedează pentru a studia mişcarea în intervalul (1800,3600) al unghiului la manivelă: - Se şterg rezultatele, apelând Motion – Delete Results - Se imprimă mişcare (clic dreapta – Properties) în cupla Revolute, cu parametrii indicaţi în fig. 2.50. Se setează Iniţial displacement 180 - Se apelează Motion – Simulate şi se obţin curbele din fig. 2.51
Fig. 2.50 Prin urmare, legea de mişcare în timp a elementului condus, ψ = ψ(t), pentru intervalul (1800,3600) al unghiului la manivelă, adică legea de variaţie în timp a unghiului în cupla Revolute 4 are forma din fig. 2.52 (ψ [grade] funcţie de t[s]). Spre deosebire de Meca3D, CosmosMotion nu trasează curbe parametrice.
88

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
Fig. 2.51
t
ψ Fig. 2.52
89

2. Analiza cinematică şi cinetostatică a sistemelor de corpuri, folosind software specializat
2.4. MOTION PENTRU INVENTOR
Motion pentru platforma Inventor este un software profesional pentru analiza cinematică şi cinetostatică a mecanismelor spaţiale.
Spre deosebire de programul Meca3D pentru SolidWorks, MotionInventor nu are optiunea de convertire automată a mecanismului. De aceea, este necesară definirea tuturor cuplelor de către utilizator. Datorită problemelor care pot apărea în definirea acestor cuple, este bine ca aceasta să se facă simultan cu inserarea condiţiilor (constraints) mecanismului.
Fig. 7.53 Odată introduse elementele mecanismului în fişierul de tip assembly – fig. 2.53,
pentru fiecare cuplă se va defini mai întâi tipul acesteia şi apoi condiţiile de poziţie ale mecanismului. Adăugarea unei cuple se face prin executarea comenzii add joint din bara de comenzi Motion.
În fereastra nou apărută, se poate stabili tipul cuplei, precum şi axele sistemului ce va fi ataşat. În exemplul de faţă, se va alege o cuplă de rotaţie. Cea mai simplă posibilitate de definire a cuplei este stabilirea axei z a acesteia. Însă există momente când această abordare simplistă poate genera erori şi, de aceea, este cel mai bine să se stabilească şi originea sistemului de axe ce va fi ataşat automat cuplei – fig. 2.54. Un
90

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
alt aspect important ce nu trebuie neglijat este că cele două origini trebuie să fie definite în acelaşi punct, comun celor două componente legate prin cuplă. Fig. 2.54
Fig. 2.55
91

2. Analiza cinematică şi cinetostatică a sistemelor de corpuri, folosind software specializat
După aceste setări, se poate testa dacă cupla a fost definită corect. Dacă nu există erori şi totuşi mecanismul nu se află în poziţia normală (componentele nu se află în contact), aceasta se datorează faptului că este activată condiţia out of place. La dezactivarea ei, se observă deplasarea componentelor mobile în poziţia corectă - fig. 2.55. Pasul următor constă în definirea condiţiilor de poziţie ale mecanismului – acestea sunt cele care menţin în poziţie mecanismul atunci când acesta nu este solicitat din punct de vedere dinamic. Fig. 2.56 Pentru exemplul de faţă, s-a ales condiţia insert, care oferă cele mai bune condiţii de definire a contactului şi a tipului cuplei dintre cele două componente batiu şi manivelă – fig. 2.56.
Fig. 2.57
92

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
În secţiunea selections se pot observa uneltele de selecţie a zonelor celor două componente pentru realizarea cuplei efective - constraint, diferită de joint, care este o cuplă definită doar pentru simularea mişcării. Se mai poate selecta, de asemenea, şi tipul cuplei: interioară sau exterioară - solution, precum şi distanţa dintre piese - offset. Odată selectate cele două suprafeţe de contact, acestea vor fi evidenţiate pe desen, iar uneltele aferente vor fi dezactivate – fig. 2.57.
În cazul în care, la începutul asamblării mecanismului, s-a neglijat orientarea piesei de bază - base, (în cazul de faţă batiul), aceasta se poate remedia prin adăugarea unei condiţii de identitate între originea sistemului de referinţă şi originea sistemului de coordonate dorit, ţinând totuşi seama şi de orientarea axelor. Acest lucru se realizează prin definirea a trei plane de lucru (lansând comanda work plane din bara de instrumente motion), intersecţia lor determinând punctul dorit fig. 2.58.
Selectând planul faţă de care se va construi planul de lucru şi glisând mouse-ul, se va observa apariţia unei linii de comandă pentru selectarea distanţei de lucru (offset). Similar, se vor realiza şi celelalte două plane fig. 2.59, 2.60, 2.61.
Fig. 2.58
Fig. 2.59
93

2. Analiza cinematică şi cinetostatică a sistemelor de corpuri, folosind software specializat
Fig. 2.60 Fig. 2.61
Fig. 2.62
94

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
Adaugarea punctului ce va deveni originea sistemului de axe se face prin comanda work point – fig. 2.62; se selecteză cele trei plane definite anterior, pentru a-l plasa la intersecţia lor – fig. 2.63. Fig. 2.63 Fig. 2.64 Ultimul pas pentru orientarea dorită este definirea unei condiţii constraint între punctul de mai sus şi originea sistemului de referintă - fig. 2.64. Toate cuplele de mişcare - joints şi condiţiile de poziţie - constraints, se pot observa în panoul din stânga - construction tree, fig. 2.65.
Trecerea de la modul de afişare al condiţiilor, la cel al cuplelor se face apelând MotionInventor, ca în fig. 2.66.
Programul permite afişarea grafului mecanismului, precum şi a proprietăţilor corpurilor şi cuplelor. În fig. 7.58, se poate observa graful mecanismului ales ca exemplu, precum şi felul şi poziţia diferitelor cuple - Joints inserate. În secţiunea Model a panoului de comenzi din stânga, sunt enumerate elementele componente ale mecanismului.
95

2. Analiza cinematică şi cinetostatică a sistemelor de corpuri, folosind software specializat
Fig. 2.65
Fig. 2.66 Cu click-dreapta pe numele piesei, alegând opţiunea Properties (fig. 2.68), se pot
afla proprietăţile fizice ale acesteia: coordonatele centrelor de greutate, momentele de inerţie, masa, suprafaţa, volumul, materialul, densitatea, fig. 2.69. În acelaşi fel, dar în secţiunea MotionInventor se pot determina proprietăţile cuplelor, precum şi condiţiile de mişcare ale diferitelor piese, fig. 2.70. Sunt afişate proprietăţile cuplei selectate şi se pot modifica atât parametrii iniţiali (limita de mişcare minimă/maximă, viteza, poziţia iniţială etc.), precum şi o serie condiţii impuse în funcţie de tipul cuplei (viteză, acceleraţie, moment de inerţie, forţă aplicată, forţă de frecare şi de amortizare etc.)
96

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
Fig. 2.68
Fig. 2.69
97

2. Analiza cinematică şi cinetostatică a sistemelor de corpuri, folosind software specializat
Tot în această secţiune se poate determina durata şi numărul de cadre necesare simulării mişcării. Proprietăţile unei cuple sau ale unei piese se mai pot determina din graful mecanismului, efectuând un click-dreapta pe cupla/piesa respectivă - fig. 2.71.
În exemplul de faţă, se prezintă modalitatea de adăugare a unui cuplu motor la manivelă: click-dreapta pe piesă şi se selectează opţiunea Properties, fig. 2.73. În fereastra nou deschisă, în secţiunea Torque se selectează direcţia de aplicare, prin apăsarea butonului CY , fig. 2.74. Parametrii momentului pot fi selectati manual, indicând valorile iniţială şi finală precum şi timpul de aplicare, în secţiunile Starting/Ending point, sau prin stabilirea curbei de variaţie a momentului, fig. 2.74.
Odată stabilite caracteristicile mecanismului, se poate trece la simularea mişcării acestuia, accesând butonul Play din bara-meniu de jos. De asemenea, se poate cere afişarea graficelor de variaţie în timp a poziţiilor, vitezelor, acceleraţiilor diferitelor puncte ale mecanismului, a vitezelor şi acceleraţiilor unghiulare ale elementelor, precum şi a reacţiunilor din legături. Accesarea utilitarului pentru trasarea graficelor se face tot din bara-meniu de jos, apăsând butonul Graph. Fereastra nou deschisă permite selectarea componentelor şi trasarea graficelor, fie în timp real, concomitent cu simularea mişcării, fie ulterior acesteia. Toate graficele sunt trasate în funcţie de timp, dacă nu este specificat alt parametru ca valoare de referinţă. Fig. 2.70
98

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
Fig 2.71 În fig. 2.75 este prezentat graficul de variaţie în timp a poziţiei centrului de masă a
manivelei. Dacă graficul nu este centrat, sau doar o parte a lui este observabilă, aceast neajuns se poate remedia efectuând click-dreapta pe grafic şi alegând optiunea Center Curves.
Fig. 2.72 Dacă se doreşte trasarea graficului în funcţie de altă coordonată, şi nu de timp, se efectuează click-dreapta pe entitatea al cărei grafic se doreşte şi se selectează opţiunea Set reference, fig. 2.76.
99

2. Analiza cinematică şi cinetostatică a sistemelor de corpuri, folosind software specializat
Fig. 2.73
Fig. 2.74
În fig. 2.77, 2.78, respectiv 2.79 sunt prezentate graficele poziţiei, vitezei, respectiv acceleraţiei centrului de masă al elementului 2, în funcţie de poziţia centrului de masă al elementului 1.
100

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
Fig. 2.75
Fig. 2.76
101

2. Analiza cinematică şi cinetostatică a sistemelor de corpuri, folosind software specializat
Fig. 2.77
Fig. 2.78
102

Popa Ion Florin, Marin Cornel, Filip Viviana - Modelarea şi simularea sistemelor robotice
103
Fig. 2.79

Modelarea structurilor mecanice din robotică utilizând SOLID WORKS
3

Modelarea şi simularea sistemelor robotice
115
NECESITĂŢII UTILIZĂRII PROIECTĂRII ASISTATE DE CALCULATOR
Informaţia grafică reprezintă o caracteristică fundamentală pentru domeniile
de activitate extrem de diverse: desenare, proiectare, cercetare, simulare, design, animaţie, jocuri, reclame.
Reprezentarea grafică, în comparaţie cu reprezentarea informaţiei prin succesiuni de texte şi numere, se bazează pe un alt mod de percepere a informaţiei. Aceasta deoerece creierul percepe figurile în ansamblul lor, aproape instantaneu, fără effort, spre deosebire de texte şi numere, pe care le sesizeză într-o manieră serială, necesitând un alt nivel de atenţie. Vehicularea informaţiei grafice a căpătat perspective spectaculoase prin folosirea graficii pe calculator. Imaginea obţinută pe echipamentul grafic electronic este o reflectare a reprezentării matematice a modelului geometric realizat de calculator, care stabileşte forma obiectului cu ajutorul funcţiilor din geometria analitică. Utilizatorul dezvoltă modelul geometric prin introducerea în sistemul grafic a trei categorii de comenzi ce trebuie interpretate. Prima categorie identifică sau generează elemente primitive de volum, ca de exemplu sfere, cuburi s.a.m.d. Cea de-a doua categorie aplică transformări geometrice acestor primitive: scalare, rotaţie, deplasare etc. Cea de-a treia categorie de comenzi combină primitivele prin operaţii logice de tip reuniune, intersecţie sau diferenţă. Pe rezultatul obţinut în urma aplicării acestor comenzi se pot face ulterior o serie de modificări cum ar fi eliminarea liniilor care nu se văd, umbrirea unor suprafeţe etc. Aceasta poate fi considerată practic o descriere procedurală a obţinerii reprezentărilor grafice pe calculator.
În cadrul pachetelor de programe CAD (Computer Aided Design - Proiectare Asistată de calculator), CAM (Computer Aided Manufacturing – Fabricaţie asistată de Calculator), CAE (Computer Aided Engineering – Inginerie Asistată de Calculator), CAI (Computer Aided Instruction – Instruire Asistată de Calculator), sunt dezvoltate aplicaţii grafice fără de care este greu de imaginat o activitate eficientă. Scopurile principale ale acestor aplicaţii: afişarea cât mai corectă a informaţiei grafice, dar şi posibilitatea optimizării unor soluţii grafice alese dintr-o mulţime cât mai acoperitoare.
Utilitatea sisemelor grafice computerizate devine şi mai evidentă din perspectiva înlocuirii conceptului tradiţional de proiectare, acela de a “vedea” soluţia, prin noul concept, care constă în “a alege soluţia optimă”.

Popa Ion Florin
116
Specifica ţia performanţelor
Concepere model
Previziune pe model
Validare model
Probe Încercări
Realizarespecimen
Definirea încercărilor
Verificarea performanţelor
A (numai calcule)B (calcule şi probe)C (numai probe)
Metoda tradiţională presupune realizarea mai multor prototipuri fizice ale unui produs şi îmbunătăţirea acestora prin testări şi modificări repetate. În condiţiile de concurenţă actuale, această metodă, scumpă şi mare consumatoare de timp, nu mai este eficientă. Sistemele grafice computerizate oferă posibilitatea modelării, îmbunătăţirii modelului prin operaţii interactive, testării acestuia prin simularea funcţionării reale şi apoi a realizării fazelor de postprocesare: crearea listelor de componente şi materiale, generarea automată a tehnologiei, generarea comenzilor numerice entru maşinile-unelte cu comandă program.
Modelare cu MEF
Pregătirea probei Probe dinamice
Analiză dinamică
Comparaţie calcul-probe
Identificare comport. dinamică
Zone fizice
Localizare
Recalare
SfârşitReanalizare
NUDA

Modelarea şi simularea sistemelor robotice
117
Astfel se ajunge la noţiunea de Procese de inginerie integrată ale produselor industriale. Lucrările recente asupra accesului integrat al Ingineriei Sistemelor disting un anumit număr de procese de inginerie fundamentale: ingineria sistemelor dezvoltarea materialelor, producţia şi operaţii şi logistică.
Aceste metodologii de inginerie integrată permit managementului de a integra procesele pe toată durata de viaţă a produsului ţinând cont de constrângerile de informaţie, mai ales pentru a construi o bază de date unică şi partajată.
Urmând consideraţiile dezvoltate precedent, se vede că încercările pot interveni: în diferite faze ale programului (exemplu: desfăşurare, producţie şi utilizare), la diferite niveluri ale arborescenţei produsului (exemplu: probe de componente, echipamente sau sisteme), ca suport la diferite procese de inginerie a produselor, în dezvoltarea materialelor la nivel elementar (exemplu: probe de impact), în producţie, în utilizarea, în ingineria sistemelor şi în special în cadrul procesului de verificare a performanţelor.
Comanda si managementinstrumente si modele
Baze de date integrate
Analiza functionala si alocarea SintezaAnaliza
cerintelor
Sistem de analiza SintezaSistem de
analiza
Verificarea functionala
Validareacerintelor
Dezvoltare har d si soft
Produ ctie
Operat ii - Logistica
Ingineria sistemelor
Verificare fizica
PiataConstrangeri
StandardeTehnologii
etc.
Modelare matematică, simulare numerică

Popa Ion Florin
118
3.1. MODELARE DE BAZĂ
3.1.1. Etapele necesare în modelare
Alegerea profilului – care profil este cel mai bun ca schiţă de start pentru începerea modelării;
Alegerea planului schiţei – o dată ce aţi ales cel mai bun profil al schiţei cum va afecta acest profil alegerea planului schiţei;
Intenţia de proiectare – care este intenţia de proiectare şi cum afectează ea modelarea;
New Part – deschiderea unei noi piese pentru modelare; Base Feature – prima entitate din arborele de definire (Feature
manager); Entităţi de tip Boss şi Cut – cum se modifică entitatea de bază prin
adăugarea de bosaje şi lamaje; Oglindirea într-o schiţă – desenarea a jumătate din schiţă şi utilizarea
oglindirii pentru a obţine întregul; Racordări (rotunjiri) – rotunjeşte muchii şi colţuri ascuţite; Schimbarea dimensiunilor – schimbând o dimensiune se schimbă geometria
modelului.
Terminologie
Feature - toate decupările, bosajele, planele şi schiţele pe care le creaţi sunt considerate entităţi;
- există entităţi bazate pe schiţe (realizate pe baza unei schiţe) în cazul bosajelor şi lamajelor; - există entităţi aplicate bazate pe muchii sau feţe (racordări).
Plane - sunt entităţi plane şi infinite; - sunt reprezentate pe ecran cu muchii vizibile; - sunt utilizate ca suprafaţă primară a schiţei pentru crearea entităţilor de tip bosaj şi lamaj.
Extrudare - constă în extrudarea unui profil de-a lungul normalei la suprafaţă sau a direcţiei unui vector identificat printr-un segment tridimensional;
Sketch - reprezentarea unei schiţe 2D; - sunt create pe feţe plane şi entităţi de tip plan
definite în cadrul modelului; - sunt utilizate în general pentru bosaje şi lamaje

Modelarea şi simularea sistemelor robotice
119
deşi pot exista şi independent. Boss – entitate solidă care adaugă material pentru modelul solid;
- prima entitate iniţială este numită Base feature şi este întotdeauna un bosaj;
- după prima entitate de tip bosaj pot fi adăugate şi alte bosaje împreună cu lamaje, toate având la bază schiţe;
Cut - utilizate pentru definirea unei decupări în modelul solid; - este opusul comenzii Boss; - materialul poate fi îndepărtat prin extrudare
(Cut Extrude), rotaţie în jurul unei axe (Cut Revolve) sau alte metode;
Racordări şi rotunjiri
– sunt entităţi care se adugă solidului; - în funcţie de natura solidului se poate adăuga
sau se poate îndepărta material; Design Intent – cum ar trebui creat şi modificat modelul;
- constă în relaţiile entităţi şi în ordinea de crearea a acestor entităţi (după cum se vede din arborele de proiectare – Featute manager Design Tree)
3.1.2. Schiţele (Sketches)
3.1.2.1. Alegerea variantei optime pentru schiţă
Atunci când se începe o schiţă (sketch) trebuie făcută o analiză vizuală a modelului piesei finale în vederea alegerii variantei optime pentru arborele de definire a piesei. Pentru a rezulta o piesă cu o configuraţie cât mai simplă este recomandat să se evite formele complicate în genul spiralelor solide, formelor rezultate prin deplasarea unei generatoare pe o directoare, solidelor rezultate prin interpolare între mai multe schiţe.
Proiectantul trebuie să se concentreze pe identificarea celui mai complicat sketch care să fie baza pentru entitatea solidă de bază (Base Feature). Pe baza acestui sketch se va realiza Base Feature şi se va reduce şi numărul celorlalte entităţi suplimentare. La acest solid se vor adăuga (Boss, Fillet) şi se vor elimina (Cut) apoi alte entităţi astfel încât din reuniuni succesive de solide simple să rezulte forma finală a modelului tridimensional al piesei.

Popa Ion Florin
120
3.1.2.2. Alegerea planului schiţei
SolidWorks are trei plane de referinţă implicite Front, Top, Right. Fiecare plan trece prin originea sistemului de coordonate cartezian şi formează împreună un triedru drept.

Modelarea şi simularea sistemelor robotice
121
Aplicaţii: Să se indice care este varianta optimă de sketch pentru piesele din figura de mai jos.

Popa Ion Florin
122
Sunt câteva lucruri care trebuie considerate când se alege planul schiţei. În primul rând sunt prezentarea piesei şi orientarea piesei în cadrul unui ansamblu.
Prezentarea piesei este legată direct de orientarea în vederea Isometrică. Este de preferat o orientare Isometrică cât mai adecvată care să ne scutească de reorientări ale modelului pentru o vizualizare completă a majorităţii detaliilor acestuia.

Modelarea şi simularea sistemelor robotice
123
Orientarea piesei în cadrul ansamblului dictează cum va fi poziţionată aceasta faţă de celelalte piese folosite pentru definirea constrângerilor (Mate). În al doilea rând alegerea planului schiţei este importantă pentru a impunerea reprezentării piesei în vederile frontală, de sus şi laterală din desenul 2D. O stabilire corectă a planelor de referinţă pentru piesă ne ajută în reprezentarea piesei în desenul 2D prin utilizarea vederilor predefinite.
3.1.2.3. Stabilirea setărilor globale şi locale
Aceste setări sunt realizate din meniul Tools, Options prin utilizarea celor două butoane: System Options şi Document Properties.
System Options
- este utilizat pentru stabilirea setărilor globale ale programului care vor fi aplicate pentru toate documentele (piese, ansambluri, desene)

Popa Ion Florin
124
realizate în SolidWorks; - există mai multe submeniuri care sunt detaliate pe scurt după cum
urmează: General
- căsuţa de dialog pentru modificarea unei dimensiuni poate fi automat afişată la introducerea dimensiunii
- comenzile de desenare sau dimensionare se închid sau rămân active după fiecare utilizare
- afişează sau nu numele şi valoarea dimensiunii - arată sau nu erorile la fiecare reconstrucţie a piesei solide - fereastra documentului care se deschide este maximizată - suprafeţele selectate sunt reprezentate cu o culoare standard (de regulă
verde) care poate fi modificată - fiecare document salvat ca solid sau ansamblu are un icon care poate fi
vizualizat în Windows Explorer - se poate impune o anumită reprezentare zecimală a dimensiunilor (de
exemplu să pună virgulă în loc de punct) - afişează sau nu un icon de confirmare a comenzii în colţul din dreapta
sus - la editarea unei entităţi este afişat automat meniul Property Manager
pentru componenta respectivă - salvează un document SolidWorks în format e-drawing ceea ce
presupune vizualizarea ulterioară cu E-drawings Viewer - se poate specifica o descriere a unei piese care apare în meniul Open şi
Save As ca atribute asociate cu piesa;
Drawings - plasare automată a dimensiunilor inserate din model - reprezentarea chenarului desenului - scalare automată a noilor vederi ale desenului astfel încât să încapă în
format - atunci când o vedere este mutată în planul foii poate să reprezinte
conţinutul vederii sau doar un chenar al acesteia - permite o afişare mai bună pentru Zoom şi Pan pentru vederi - vederile pot fi activate automat -detaliile pot avea o reprezentare
însoţită sau nu de un cerc -se pot selecta şi entităţi care au fost ascunse - elimină dimensiuni duplicate la inserarea automată a cotelor pe desen - permite updatarea automată la deschiderea desenului - permite ascunderea unui component la crearea unei vederi - permite reprezentarea centrelor arcelor de cerc - permite reprezentarea punctelor de pe schiţă ca cercuri pline - permite evidenţierea la printare a vederilor care nu au fost updatate

Modelarea şi simularea sistemelor robotice
125
- permite specificarea scalei de reprezentare pentru detalii - specifică o proprietate a documentului care să fie folosită ca revizie în
cadrul bazei de date PDMWorks.
Display Style - permite reprezentarea tuturor muchiilor (model wireframe) - permite afişarea sau nu a liniilor ascunse (în gri) - permite afişarea piesei în mod shade cu muchii sau shade simplu - permite modificarea calităţii de reprezentare pentru vederi - muchiile tangente pot fi vizualizate în trei moduri: ca o linie solidă, cu
o linie cu anumite caracteristici date de fontul liniei (subtire, punctat etc), nereprezentată;
Area Hatch/ Fill Options - se alege tipul haşurii, scala de reprezentare şi unghiul haşurii;
System Colors - pot fi setate culorile pentru Property Manager sau o schemă
predefinită; - poate fi stabilit un background diferit pentru ecranul programului;
Sketch - permite utilizarea sau nu a schiţelor complet definite înaintea de
crearea unui solid; - afişează centrele arcelor de cerc ca markere; - afişează punctele de pe sketch ca cercuri pline cu următoarele culori:
negru (complet definit), albastru (subdefinit), roşu (supradefinit), verde (curent selectat);
- evidenţiază liniile comune de pe modelul solid cu cele ale sketch-ului;
- oferă posibilitatea de a închide automat un sketch deschis cu muchii ale modelului solid;
- crează o schiţă pentru o piesă nouă selectând planul frontal ca referinţă
- suprascrie dimensiuni la dragarea sau mutarea unei schiţe; - adaugă automat relaţii geometrice pe schiţe; - poate să afişeze şi planul când este activată reprezentarea Shaded; - crează un punct virtual la intersecţia a două linii; - în cazul supracotărilor există opţiunea de a alege dacă dimensiunea
va fi afişată ca informală, va deveni conducătoare sau va fi eliminată;
Display/ Selection - liniile ascunse pot fi continui sau punctate;

Popa Ion Florin
126
- permite selectarea liniilor ascunse în diverse moduri de reprezentare; - liniile tangente pot fi reprezentate ca linii continui, ca linii punctate
sau nereprezentate; - stabileşte nivelul de transparenţă al ansamblului pentru editarea în
context al piesei (0 – 100%); - selectează toate muchiile entităţii selectate; - permite selecţia prin transparenţă; - afişează triedrul de referinţă;
Performance - permite verificarea erorilor atunci când se modifică sau se adaugă o
nouă entitate; - permite o calitate ridicată a transparenţei atât în mod normal de
vizualizare cât şi în timpul rotaţiei modelului; - generarea curburii poate fi sau nu automată; - încarcă ansamblurile în mod lightweight pentru creşterea
performanţei; - la rotirea ansamblurilor nu se mai reprezintă detaliile; - se poate stabili viteza de animaţie în cazul restricţiilor de asamblare
(Mate);
Assemblies - componentele pot fi mutate prin dragare cu mouse-ul;
Large assembly mode - entităţile pot fi încărcate automat ca lightweight sau să se stabilească
un număr de entităţi după care să treacă componentele în mod lightweight;
- sunt disponibile aceleaşi opţiuni ca pentru meniurile Drawings şi Display;
External references - deschide toate documentele referenţiate cu acces read-only; - atunci când este salvat un document care conţine documente
referenţiate acestea nu vor fi salvate; - încarcă documentele referenţiate cu anumite opţiuni; - stabileşte legătura dintre tabelul de proiectare şi model; - în cazul ansamblurilor generează nume pentru geometria referită; - oferă posibilitatea stabilirii unui nume pentru component diferit de
cel al fişierului;
Default Templates - stabileşte căile de încărcare a machetelor utilizate pentru desene,
piese şi ansambluri;

Modelarea şi simularea sistemelor robotice
127
File locations - stabileşte locaţia tuturor fişierelor utilizate în Feature Palette, tabele
de îndoire a tablelor, profile sudate etc;
Spin Box increments - stabileşte incrementul utilizat pentru dimensiuni liniare şi
unghiulare;
View rotation - stabileşte incrementul de rotaţie pentru tastele cu săgeţi; - stabileşte incrementul de rotaţie pentru mouse; - stabileşte viteza de animaţie; - stabileşte calea în care se vor face toate salvările de back-up;
Backups Piping
- stabileşte calea pentru directoarele în care se află biblioteca de componente de ţevi;
- crează automat fitting-uri impuse de utilizator; - adaugă automat ţevi pentru schiţe deschise; - adaugă automat racordări pentru sketch;
Pentru stabilirea setărilor locale valabile doar pentru documentul curent (piesă, ansamblu, desen 2D) se foloseşte al doilea meniu Document Properties din Tools, Options cu următoarele submeniuri conform figurii de mai jos:
Detailing - în acest submeniu sunt incluse mai multe submeniuri care ne ajută să
controlăm proprietăţile desenelor 2D; - stabileşte standardul de cotare (ISO, ANSI, DIN, JIS, BSI, GOST,
GB); - afişează cotele în mm şi inch în acelaşi timp (sistem dual de
reprezentare); - scalează mărimea simbolurilor de sudură; - zecimalele pot fi reduse la valori întregi, şterse şi reprezentate cu
valoarea impusă prin submeniul Units; - traseul de secţiune nu intersectează vederea (conform standardului
românesc de reprezentare); - controlează lungimea axei de simetrie pentru o vedere - sunt inserate automat centrele arcelor, linii de simetrie, numere de
repere, cote; - sunt controlate reprezentarea cotei ca linii de extensie; - este aleasă modalitatea de reprezentare a referinţelor geometrice - stabileşte reprezentarea liniilor pentru rupturile vederilor;

Popa Ion Florin
128
- modifică automat tabelul de componenţă atunci când apar modificări ale ansamblului;
Dimensions - adaugă implicit paranteze pentru cote de referinţă; - -cota este reprezentată automat în reţeaua de grid a desenului -cota
este centrată între liniile de extensie; - stabileşte distanţele între cote paralele; - controlează stilul de reprezentare al săgeţilor; - specifică spaţiul pentru linii de extensie şi linii indicatoare când
acestea sunt întrerupte; - specifică lungimea liniilor indicatoare (leader); - controlează stilul de orientare a textului şi a leader-ului faţă de
referinţele cotate; - controlează orientarea textului; - stabileşte precizia dimensiunilor (liniare, unghiulare, alternative); - controlează afişarea toleranţelor;
Notes - setează stilul adnotărilor pentru documentul curent (aliniarea
textului, săgeata indicatoare);
Balloons - stabileşte stilul de reprezentare al reperelor de pe un desen de
ansamblu cu numere ataşate fiecărei piese; - există şi varianta de a alege o schemă predefinită de reprezentare a
reperelor;
Arrows - stabileşte stilul săgeţii şi mărimea săgeţilor (grosime, lungime) atât
pentru cote cât şi pentru linii de secţiune;

Modelarea şi simularea sistemelor robotice
129
Virtual Sharps - stilul de reprezentare pentru colţuri (intersecţii) virtuale;
Annotations display - pot fi selectate doar acele tipuri de adnotări care să fie reprezentate
pe desen (filete, referinţe, cote, cote de referinţă, toleranţe geometrice, rugozităţi, suduri);
- scalarea textului poate fi automată sau nu; - adnotările pot fi reprezentate doar în vederile în care au fost create; - se pot utiliza setările existente în ansamblu pentru toate
componentele; - se pot ascunde dimensiunile bălăngănite şi adnotările similare;
Annotations font - stabileşte fontul utilizat pentru adnotări;
Tables options - stabileşte stilul utilizat pentru reprezentarea tabelelor de găuri, de
revizie şi de componenţă;
View labels options - stabileşte reprezentarea etichetelor vederilor inclusiv scala de
reprezentare a vederii;
Grid/ Snap - stabileşte mărimea reţelei grid şi snap-ul; - stabileşte snap liniar şi unghiular;
Units - stabileşte sistemul unităţilor de măsură (MKS, CGS, MMGS, IPS,
Custom); - stabileşte afişarea duală a dimensiunilor; - stabileşte unitatea pentru densitate şi forţă; - stabileşte stilul şi grosimea liniilor în desene;
Line Font Image quality
- stabileşte calitatea de reprezentare pentru modul shaded sau wireframe.

Popa Ion Florin
130
Reguli care guvernează schiţele (sketch-urile) :
- schiţele nu trebuie să conţină un contur care se autointersectează; - colţurile ar trebui să fie strâns închise; - schiţa componentei de bază nu poate să conţină profile disjuncte;
O schiţă poate fi:
-subdefinită (under defined) cand schiţa este colorată în albastru total sau parţial
- complet definită (fully defined) când schiţa este complet colorată în negru;
- supradefinită (overdefined) când schiţa are constrângeri duplicate sau care intră în conflict şi care sunt colorate în roşu şi trebuie şterse;

Modelarea şi simularea sistemelor robotice
131
Confirmation corner

Popa Ion Florin
132
- când sunt active mai multe comenzi SolidWorks în colţul din dreapta sus al ferestrei active apare un simbol sau un set de simboluri. Această zonă este denumită colţ de confirmare.
- când este activă sau deschisă o schiţă colţul de confirmare afişează două simboluri: primul arată icon-ul de sketch, iar celălalt este un X roşu. Dând click pe icon-ul de sketch se salvează şi updatează toate modificările făcute pe sketch, iar prin click pe X-ul roşu se iese din sketch şi se distrug orice modificări.
- când sunt active alte comenzi colţul de confirmare afişează un icon marker √ şi un X.
Constrângeri
Întrucât schiţa este deja constrânsă în cazul aplicării unei dimensiuni suplimentare produce un conflict şi un mesaj de eroare care se traduce prin supracotare (overdefined).
În cazul în care totuşi se doreşte introducerea acestei dimensiuni suplimentare apare mesajul Make This Dimension Driven (Face această dimensiune condusă). În speţă dimensiunea condusă – Driven - nu poate fi utilizată pentru modificarea desenului.

Modelarea şi simularea sistemelor robotice
133
Comenzi pentru realizarea unui sketch
Pentru realizarea unui sketch există mai multe variante:
- utilizarea meniului Tools, Sketch Entities unde se găsesc comenzile necesare pentru desenare (fig. 13);
- utilizarea toolbar-ului Sketch disponibil prin selectarea sa din View, Toolbars, Sketch (fig. 14) sau prin click dreapta pe un icon oarecare şi alegerea opţiunii Customize Command Manager.

Popa Ion Florin
134
3.1.3. Comenzi pentru desenare
Line Este utilizată pentru trasarea de segmente orizontale, verticale sau oarecare care pot fi legate prin relaţii geometrice de alte entităţi existente în desen. În mod automat la trasarea unei linii verticale sau orizontale aceasta primeşte proprietatea corespunzătoare în lista de relaţiilor geometrice.
Arc
La un sketch pot fi adăugate arce de cerc definite în următoarele variante:
a. trasarea unui arc indicand centrul cercului din care face parte arcul, punctul de start si punctul final al arcului.

Modelarea şi simularea sistemelor robotice
135
b. trasarea unui arc tangent la o entitate de tip linie sau arc, care se va continua cu o entitate care va fi tot tangentă la acest arc;
- în vederea trasării continue a unei linii cu un arc tangent se poate utiliza short–cut-ul A prin care se activează automat un arc după care revine imediat la trasarea unei linii.
c. trasarea unui arc prin trei puncte:
două de capăt ale arcului şi indicarea celui de-al treilea punct între celelalte două puncte pentru stabilirea razei arcului şi a direcţiei acestuia.

Popa Ion Florin
136
Centerline
- utilizată pentru trasarea axelor de
simetrie sau de rotaţie pentru entităţi solide obţinute prin rotire în jurul unei axe şi pentru entităţi ajutătoare (de construcţie).
Punct
- utilizată pentru trasarea unuia sau mai multor puncte care pot fi constrânse prin
condiţii de coincidenţă pe segmente, prin coincidenţă cu puncte mediene ale arcelor sau segmentelor sau prin aliniere verticală sau orizontală cu puncte mediene, centre ale

Modelarea şi simularea sistemelor robotice
137
Spline
- trasează o curbă spline la care pot fi adăugate oricâte puncte pentru stabilirea formei dorite de curbă

Popa Ion Florin
138
Circle
- trasarea unui cerc cunoscându-se
centru şi precizându-se raza lui;
Rectangle
- comandă ce permite trasarea trasarea
unor entităţi de tip dreptunghi;

Modelarea şi simularea sistemelor robotice
139
3.1.4. Comenzi de editare
Fiecare din aceste comenzi este apelată fie din meniul Tools, Sketch Tools sau din icon-ul corespunzător în toolbar-ul Sketch.
Principalele comenzi de editare sunt: Fillet Extend Copy Chamfer Mirror Rotate
Trim Move Circular and Linear Step

Popa Ion Florin
140
Sketch Fillet
- comandă ce permite racordarea a două linii ce se intersectează;
↓
Sketch Chamfer - comandă ce permite teşirea a două linii ce se intersectează;
↓

Modelarea şi simularea sistemelor robotice
141
Trim
- comandă ce permite tăierea unor obiecte sau entităţi prin selectarea elementului ce urmează a fi tăiat şi respectiv, în mod dinamic a porţiunii care se doreşte tăiate;
→
Extend
- comandă ce permite prelungirea unei entităţi până întâlneşte altă entitate;
→
Mirror
- comandă ce permite oglindirea obiectelor faţă de o linie de referinţă (CENTERLINE);
→

Popa Ion Florin
142
Move or Copy - comandă ce permite mutarea, copierea, rotirea
sau scalarea unui obiect sau entităţi; a. Mutarea
↓
b. Rotirea
↓

Modelarea şi simularea sistemelor robotice
143
Linear Step and Repeat - comandă ce permite multiplicarea liniară unui obiect sau entităţi după cele două axe X şi Y (rectangular);
Circular Step and Repeat - comandă ce permite multiplicarea circulară unui obiect sau entităţi, în raport cu un punct numit centru de multiplicare;

Popa Ion Florin
144
3.1.5. Comenzi de conversie
Convert Entities, Offset Entities, Intersection Curve, Construction Geometry
Prin aceste comenzi de conversie se pot transfera în schiţa curentă entităţi
definite în alte schiţe sau entităţi solide.
Convert Entities
- comandă ce permite transformarea intersecţiei dintre două suprafeţe în muchie, respectiv în entitate de tip linie.
Offset Entities … - comandă ce permite copierea unui contur selectat la o distanţă precizată;
↓

Modelarea şi simularea sistemelor robotice
145
3.1.6. Comenzi de constrângere
Add Relation, Display/ Delete Relations
Există posibilitatea de adăugare de constrângeri sau editarea celor existente. Add Relation - comandă ce permite stabilirea unui anumit tip de legături între diferite entităţi
cum ar fi: oriyontalitate, paralelism, perpendicularitate, coincidenţă, egalitate etc.
↓

Popa Ion Florin
146
Display/ Delete Relations
- comandă ce permite ştergerea unor relaţii de legătură ce există între diferite obiecte sau entităţi;
↓
3.1.7. Vizualizarea orientării unei piese În vederea orientării unei piese se utilizează toolbar-ul Standard View.
Pentru poziţionarea piesei într-o anumită poziţie se utilizează toolbar-ul View.

Modelarea şi simularea sistemelor robotice
147
3.2. ENTITĂŢI SOLIDE PRIMARE
Entităţile solide primare sunt rezultate prin operaţii de extrudare şi rotaţie în
jurul unei axe. Orice piesă solidă va conţine o reuniune de entităţi solide aflate în contact sau
care se suprapun. Nu pot exista entităţi solide disjuncte în cadrul aceleiaşi piese solide. Bara de instrumente ce permite crearea şi lucrul cu entităţi solide este prezentată mai jos
3.2.1. Entităţi solide rezultate prin extrudare
Boss Feature
Comanda de extrudare este disponibilă din bara de instrumente (toolbar-ul) Features sau din meniul Insert, Boss/ Base.

Popa Ion Florin, Marin Cornel, Filip Viviana
148
O entitate solidă primară de extrudare este generată pe baza unui sketch evidenţiat conform figurii de mai sus. La această entitate primare numită şi Base Extrude se vor adăuga alte entităţi solide care vor avea o relaţie de contact cu entitatea primară şi/ sau între ele.
Spre exemplu este adăugată o entitate solidă de extrudare conform figurii de mai jos în care s-a introdus o nouă schiţă complet definită pe faţa selectată.
În acest sketch s-a utilizat opţiunea de oglindire pentru linii şi arce tangente, relaţii de coincidenţă între segmentele sketch-ului şi piesa solidă, relaţii dimensionale.
În urma comenzii de extrudare există varianta obţinerii unui singur solid prin opţiunea Merge sau a unei reuniuni de două entităţi solide aflate în contact.

Modelarea şi simularea sistemelor robotice
149
Opţiunile comenzii Boss/ Extrude
Există câteva opţiuni de obţinere a unui solid disponibile în Direction 1 şi Direction 2, de unde se pot alege următoarele variante de extrudare:
Blind – crează o extrudare cu o distanţă dată de utilizator în direcţia impusă (implicit este normala la sketch sau poate fi un vector identificat printr-o linie din alt sketch) ;
Through all – crează o extrudare care trece prin toate entităţile solide, limitată fiind de ultima suprafaţă din modelul solid existent (în direcţia impusă de utilizator);
Up to Vertex
– este creată extrudarea până la o entitate de tip punct sau linie în direcţia impusă de utilizator;
Up to Surface
- este creată extrudarea până la o suprafaţă sau un plan selectat de utilizator;
Offset from Surface
– extrudarea este generată până la o suprafaţă virtuală definită ca offset faţă de o suprafaţă existentă pe modelul solid;
Up to Body - extrudarea este generată până la următorul solid de pe direcţia de propagare a extrudării;
Mid Plane - extrudarea este generată simetrică faţă de planul sketch-ului rezultând o entitate solidă cu grosimea totală dată de utilizator.
Alte Opţiuni
a. Draft extrude
După alegerea variantei de extrudare şi a direcţiei acesteia se poate ca extrudarea să conţină o înclinare a suprafeţei laterale cu un unghi impus – numit drafting.
b. Extrudare pe două direcţii
Dacă se doreşte extrudarea pe două direcţii a aceluiaşi sketch se va alege opţiunea Direction 2
c. Selected Contours
În cazul în care sunt selectate mai multe contururi închise din cadrul sketch-ului se va realiza extrudarea numai pentru acele contururi, urmând ca să poată fi extrudate într-o altă comandă şi alte contururi din sketch.

Popa Ion Florin, Marin Cornel, Filip Viviana
150
În cazul în care un sketch este folosit în mai multe comenzi de extrudare devine share. În exemplul de mai jos este realizată Extrude 2 după două direcţii în care este selectat doar conturul exterior al sketch-ului.
Cut Extrude
Comanda este apelabilă prin selectarea din meniul Insert, Cut, Extrude sau
din icon-ul din meniul toolbar Features.
Este similară comenzii de extrudare Boss, Extrude cu diferenţa că solidul este decupat cu un buzunar pe baza profilului sketch-ului. În exemplul de mai sus s-a ales pentru opţiunea Direcţie de extrudare – Direction 1, opţiunea Mid Plane, realizâmdu-se o extrudare simetrică faţă de entitatea de extrudare.
Share sketch

Modelarea şi simularea sistemelor robotice
151
3.2.2. Comenzi simple de editare ale pieselor – rotunjiri şi racordări
Fillet
Comanda este apelabilă din meniul Insert, Features sau prin icon-ul . Comanda se referă la racordări când se adaugă material şi rotunjiri când se
elimină material din solid.
racordare rotunjire
Există următoarele opţiuni:
- rază constantă sau raze diferite de racordare pentru mai multe muchii prin selectarea opţiunii Multiple Radius Fillet din meniul comenzii Fillet; - rază variabilă de la 10 mm la 8 mm cu interpolare polinomială între capete dacă se alege opţiunea Smooth Transition şi interpolare liniară dacă se alege Straight Transition.

Popa Ion Florin, Marin Cornel, Filip Viviana
152
- racordarea a două suprafeţe cu sau fără contact între ele; - racordarea a trei suprafeţe adiacente pentru realizarea unei racordări complete;

Modelarea şi simularea sistemelor robotice
153

Popa Ion Florin, Marin Cornel, Filip Viviana
154
Parametri de control
Setback
Pentru controlul tranziţiei racordării de colţ la intersecţia a trei muchii se modifică lungimea fiecărei tranziţii de racordare pentru colţul solicitat (parametri setback) astfel încât să rezulte o racordare controlată de utilizator.
Fillet Options
Se referă la păstrarea entităţilor feţelor care urmează a fi racordate, rotunjirea colţurilor. În cazul unei racordări cu rază prea mare şi aceasta depăşeşte modelul există variantele: păstrarea unei muchii, a unei suprafeţe sau opţiunea implicită. În exemplul din figură prin selectarea suprafeţei găurii şi a muchiei evidenţiate cu opţiunea Keep Edge este executată comanda Fillet doar pentru muchia selectată nu şi pentru celelalte muchii ale suprafeţei. Eficienţa acestor opţiuni este pusă în

Modelarea şi simularea sistemelor robotice
155
evidenţă când se doreşte realizarea unui model parametric astfel încât indiferent de profilul găurii să fie aleasă doar muchia acesteia.
Se observă, în exemplul de mai sus, că – pentru a se rotunji muchiile celor trei găuri – s-a selectat două suprafeţe cilindrice, Face<1> şi Face <2> şi o muchie circulară, Edge<1>. Pentru o rotunjire cu o rază de 2 mm s-a stabilit opţiunea Distance din setările Setback Parameters la 4 mm.

Popa Ion Florin, Marin Cornel, Filip Viviana
156
3.2.3. Comenzi simple de editare ale pieselor – teşiri
Chamfer
Comanda este apelabilă din meniul Insert, Features sau prin icon-ul . Opţiunile comenzii Chamfer sunt:
a. unghi – distanţă (teşire de muchii sau contur închis);
În zona de dialog Edges and Faces or Vertex s-a selectat Face <1>. S-a selectat opţiunea Angle distance, iar pentru această opţiune s-au precizat mărimile de teşire, astfel: distanţa: 3,0 mm, unghiul: 45o. Pentru o teşire de-a lungul întregii suprafeţe selectate s-a selectat opţiunea Tangent propagation.
b. distanţă – distanţă (teşire de muchii sau contur închis) cu opţiunea de distanţă egală ;

Modelarea şi simularea sistemelor robotice
157
c. vertex (teşirea unui colţ);

Popa Ion Florin, Marin Cornel, Filip Viviana
158
3.3. ENTITĂŢI DE REVOLUŢIE ŞI
PATERN-URI CIRCULARE
Pentru exemplificarea facilităţilor oferite de program se consideră exemplul unei piese de revoluţie cu entităţi de tip pattern circular. Intenţia de proiectare pentru această piesă este prezentată în figura se mai jos.
Trebuie avute în vedere următoarele:
- spiţele trebuie să fie egal spaţiate; - numărul spiţelor poate varia; - numărul spiţelor variază cu diametrul volanului; - centrul marginii volanului se află la capătul spiţei; - spiţele trec prin centrul osiei;
3.3.1. Crearea osiei
Osia este o entitate de revoluţie care este creată prin rotirea unei schiţe în jurul unei axe. Faţă de schiţa alăturată se impun următoarele observaţii:
- axa de simetrie (Centerline) trece prin origine şi nu trebuie să taie schiţa;

Modelarea şi simularea sistemelor robotice
159
- se utilizează linii şi un arc definit prin 3 puncte (centru şi două puncte de pe circumferinţă);
- pentru continuitatea profilului s-au adăugat două fillet-uri cu raze egale de 5mm;
- arcul este cotat faţă de linia verticală care conţine punctele de pe circumferinţa arcului (cota de 11.72 mm) care apoi este modificată prin selectarea cotei şi dragarea originii liniei de extensie din dreapta până la suprapunerea cu arcul de cerc şi transformarea cotei mari în cota mică.

Popa Ion Florin, Marin Cornel, Filip Viviana
160
În final rezultă schiţa alăturată în care s-a adăugat diametrul de φ 25 mm prin dimensionarea între linia verticală şi linia de axă şi dragarea dimensiunii în partea dreaptă a liniei de axă.
Revolved Boss/Base
Crearea entităţii de rotaţie se face prin comanda Revolve din meniul Boss/Base
sau prin selectarea icon-ului . Aşa cum se observă şi din figura de mai jos, pentru o definire corectă, este necesar precizarea parametrilor revoluţiei (Revolve Parameters): axa de rotaţie, direcţia după care se face rotaţia, respectiv unghiul după care se face rotaţia. În zona de selecţie Selected Contours se precizează, prin selecţie pe desen, conturul ce va fi rotit.
Dacă schiţa este corect definită la selectarea comenzii Revolve este previzualizat solidul rezultat.
3.3.2. Crearea spiţei
Spiţa este creată printr-o extrudare. Schiţa este realizată din linii şi arce tangente. Se alege planul Right pentru definirea schiţei.
Se foloseşte un Offset pentru copierea profilului superior la distanţa de 16 mm. Realizarea conturului ce defineşte spiţa volanului se face utilizănd linii şi arce, constrângerile dintre acestea realizându-se fie prin dimensionare, fie prin relaţii de legătură: tangenţă, coincidenţă.

Modelarea şi simularea sistemelor robotice
161
Poziţionarea primului contur se face în raport cu suprafaţa superioară a osiei,
la o distanţă de 10 mm.
Se completează profilul prin dimensionarea limitei din dreapta a volanului
Pentru extrudarea profilului realizat este necesară înciderea conturului prin cele două drepte paralele ce au dimensiunea de 16 mm. Dacă s-a realizat un contur complet definit – acesta va fi reprezentat cu culoarea negru. În caz contrar, este necesar verificarea dimensionării, poziţionării şi relaţionării elementelor componente ale conturului

Popa Ion Florin, Marin Cornel, Filip Viviana
162
Crearea entităţii solide de extrudare Se utilizează opţiunea Mid Plane pentru generarea extrudării cu grosimea de
8mm.

Modelarea şi simularea sistemelor robotice
163
3.3.3. Adăugarea Fillet-urilor pentru spiţă Se aplică rotunjiri pentru cele patru muchii ale spiţei cu raza de 3 mm.
Prin selectarea opţiunii Tangent Propagation rezultă o propagare tangentă a fillet-ului pentru seturile selectate.
3.3.4. Crearea pattern-ului circular pentru spiţă
Circular Pattern
Prin pattern circular sunt copiate entităţi solide într-o succesiune circulară controlată prin centrul de rotaţie, un unghi şi numărul de copii.
La modificarea entităţii originale copiate circular se modifică automat şi copiile.
Axa faţă de care sunt generate copiile circulare multiple poate fi o muchie, o axă, o axă temporară sau o dimensiune unghiulară.
Comanda este disponibilă din meniul Insert, Features, Circular Pattern sau
prin icon-ul

Popa Ion Florin, Marin Cornel, Filip Viviana
164
Este afişată axa temporară a entităţii de revoluţie prin selecţia View Temporary Axis din meniul View. Aceste axă temporară poate fi făcută permanentă şi botezată cu un nume ales de utilizator prin comanda Axis Geometry,
Axis sau din meniul Reference Geometry prin icon-ul .

Modelarea şi simularea sistemelor robotice
165
Se selectează axa temporară introdusă şi apoi icon-ul Circular Pattern . Rezultă fereastra de mai jos în care se remarcă parametri pattern-ului circular şi opţiunea de alegere a unui număr de entităţi care să fie copiate circular pentru un unghi de 360º.
Există opţiunea de a suprima din setul de copii anumite entităţi care se doreşte să nu fie afişate (Instances to skip).
Toţi parametri introduşi pentru pattern-ul circular pot fi modificaţi ulterior prin dublu click pe comanda afişată în Feature Manager.
Se alege un număr de 3 entităţi generate echidistant (Equal spacing) pe un arc complet de 360º.
3.3.5. Crearea volanului
Volanul este o entitate de revoluţie generată prin rotirea unei schiţe în jurul unei axe (Revolve). Dacă în procesul de aplicare a comenzii Revolve apare mesaj de eroare, trebuie verificată integritatea schitei realizate, respectiv dacă aceasta este complet definită (elementele componente sunt dimensionate, poziţionate corect în raport cu restul desenului, conturul este închis).

Popa Ion Florin, Marin Cornel, Filip Viviana
166
Schiţa este realizată în planul Right identic cu planul în care s-a definit schiţa pentru extrudarea spiţei. Schiţa este simetrică faţă de muchia extremă a spiţei, este definită prin linii şi arce tangente şi are dimensiunile de pe figura de mai sus. S-au utilizat relaţii de tip Midpoint între axa centrelor ovalului schiţei
Rezultă entitatea solidă din figura de mai sus în care s-a utilizat pentru axa de rotaţie o axă definită în schiţa curentă. 3.3.6. Introducerea Fillet-urilor pentru joncţiunile Osie-Spiţă şi Spiţă-Volan
Se vor selecta toate muchiile joncţiunilor sau se poate face selecţia suprafeţelor selectate care va aplica comanda Fillet pentru toate muchiile care aparţin suprafeţelor respective.

Modelarea şi simularea sistemelor robotice
167
Prin selectarea opţiunii Tangent propagation rezultă propagarea fillet-ului pentru toate contururile închise ale joncţiunilor.
3.3.7. Copierea unei entităţi din altă piesă
Are ca scop economisirea timpului de realizare a modelului piesei. Există opţiunea de aplicare a entităţii dorite prin dragarea ei de pe o altă piesă pe care a fost definită.
Se doreşte în final realizarea unui ansamblu arbore – roată de volan, prin urmare asamblarea dintre cele două piese are ca entitate comună suprafaţa exterioară a capătului arborelui şi o cavitate generată în osia roţii de volan.

Popa Ion Florin, Marin Cornel, Filip Viviana
168
Se copiază (Ctrl + C) entitatea D Cut după care se aplică Paste (Ctrl + V) pe suprafaţa frontală a osiei conform figurii. La apariţia mesajului se alege opţiunea Dangle pentru a repara ulterior entităţile care nu mai sunt restricţionate geometric.
Se editează schiţa care stă la baza cavităţii Cut Extrude şi se va adăuga eroarea de constrângere inexistentă – concentricitate între arcul schiţei şi cel al muchiei exterioare a osiei.

Modelarea şi simularea sistemelor robotice
169
De remarcat, în figura de mai sus, că extrudarea prin tăiere (Cut-Extrude) s-a făcut utilizîndu-se pentru direcţia de extrudare (Direction 1) opţiunea Blind iar pentru adâncimea de extrudare luându-se valoarea 24 mm. Extrudarea se face implicit pentru schiţa selectată realizată într-un plan al schiţei (opţiunea de extrudare Sketch Plane)
Rezultă piesa complet definită cu entitatea solidă copiată pe suprafaţa osiei conform figurii de mai jos.

Popa Ion Florin, Marin Cornel, Filip Viviana
170
3.3.8. Crearea teşiturilor
Se vor realiza teşituri pe muchia circulară a osiei. Se utilizează opţiunea Distanţă – Distanţă (Distance–Distance) care are posibilitatea de modificare a parametrilor atât din meniu cât şi de pe figură.

Modelarea şi simularea sistemelor robotice
171
3.3.9. Introducerea rotunjirii pentru suprafaţa teşiturii
Se finalizează piesa prin realizarea unei rotunjiri cu raza de 1 mm pentru suprafaţa superioară a osiei pe care s-a făcut teşirea. Utilizând opţiunea de selectare a suprafeţei nou creată prin teşire se vor realiza două rotunjiri – frontală şi laterală – pentru osie.
3.3.10. Determinarea proprietăţilor fizice
Mass Properties
Unul din beneficiile lucrului cu un model solid este posibilitatea realizării calculelor inginereşti pentru piesele proiectate ca de exemplu:
- masa; - volumul; - centrul de greutate; - momentele de inerţie.
Proprietăţile secţiunii pot fi de asemenea calculate pe baza unei feţe plane sau al unui sketch care poate fi curent aflat în editare sau selectat.
Pentru determinarea proprietăţilor fizice ale unui model enumerate mai sus se utilizează comanda Mass Properties acces ibilă din meniul Tools, Mass Properties
sau prin selectarea icon-ului .

Popa Ion Florin, Marin Cornel, Filip Viviana
172
Modificarea densităţii materialului
piesei este disponibilă din meniul Options al comenzii Mass Properties.
După introducerea densităţii materialului se dă Recalculate pentru afişarea noilor proprietăţi fizice ale piesei.
Densitatea materialului poate fi modificată şi din meniul Tools, Options, Document Properties, Material Properties de unde se mai pot modifica tipul de haşură, scala de reprezentare a haşurii şi unghiul acesteia.
Componentele Mass Properties ale unei piese pot fi setate ca atribute ale unei
piese prin Custom Property din meniul File, Properties, Custom. Această informaţie poate fi disponibilă prin inserarea ei în Tabelul de Componenţă (Bill of Materials). Se tastează în câmpul Name pe rând numele atributelor dorite Masa şi Volum, după care pentru fiecare caz în parte în câmpul Value se poziţionează cursorul mouse-ului şi se alege din casuţa alăturată Linked to Value cele două proprietăţi fizice.

Modelarea şi simularea sistemelor robotice
173
3.4. UTILIZAREA ECUAŢIILOR DE PARAMETRIZARE
De multe ori este nevoie să stabilim o relaţie între parametri care nu se poate realiza prin utilizarea relaţiilor geometrice sau tehnicilor de modelare. Se pot utiliza ecuaţii pentru a impune relaţii matematice între dimensiunile modelului. În particular o relaţie de egalitate simplă între două sau mai multe dimensiuni poate fi realizată prin opţiunea Link Values.
Pentru a exemplifica ecuaţiile se va utiliza modelul anterior pentru care se va scrie o ecuaţie care să modifice numărul de spiţe funcţie de diametrul volanului.
3.4.1. Pregătirea pentru scrierea ecuaţiilor
3.4.1.1. Redenumirea parametrilor
Parametrii sau dimensiunile sunt create de sistem cu unele nume criptate implicit. Pentru a face mai uşoară interpretarea de către alţi utilizatori a ecuaţiilor şi a înţelege ce anume este controlat prin acestea ar trebui să redenumiţi dimensiunile dându-le nume mai logice şi mai uşor de înţeles.
3.4.1.2. Dependent funcţie de independent
SolidWorks foloseşte ecuaţii de forma Dependent = Independent. Aceasta înseamnă că în ecuaţia A = B programul determină pe A în funcţie de B care este dat.. Odată ce ecuaţia este scrisă şi aplicată nu se poate schimba A în mod direct. Înainte de a scrie ecuaţia trebuie să se decidă care parametru va conduce ecuaţia (parametrul independent B) şi care va fi condus (parametrul dependent A).
În acest exemplu vom controla numărul de spiţe funcţie de diametrul volanului ceea ce se traduce prin aceea că diametrul volanului este parametrul conducător sau independent, iar numărul de spiţe este parametrul condus sau dependent. Prin urmare ecuaţia ar trebui să fie scrisă sub forma:
spite nr = diametru / C
3.4.1.3. Redenumirea dimensiunilor
Numele dimensiunilor este de forma D1, D2, D3 ş.a.m.d. Putem să schimbăm aceasta cu orice nume descriptiv. Există doi termeni care sunt utilizaţi în cadrul proprietăţilor unei dimensiuni şi care au legătură cu scrierea ecuaţiilor. Aceştia sunt: Nume: este partea care poate fi modificată. Implicit este D1, D2 sau D3 etc. Numele întreg: este alcătuit din componenta Nume la care se adaugă precizarea

Popa Ion Florin, Marin Cornel, Filip Viviana
174
unde este utilizată dimensiunea respectivă şi este de forma Nume@SketchName sau Nume@FeatureName. Două dimensiuni pot avea acelaşi Nume atâta timp cât ele nu sunt în aceeaşi componentă (Feature) sau schiţă (Sketch). Când o ecuaţie este scrisă pentru un ansamblu numele unui parametru va fi Nume@FeatureName@PartName.
Funcţii afişate în casuţa de dialog New equation sunt: +, -, *, /. Mai există funcţii trigonometrice ca sin(3.1415) şi altele ca valoare absolută, intreagă sau exponenţială.
Atunci cînd este scrisă o ecuaţie care determină o mărime care necesită o valoare întreagă programul preia valoarea reală pe care o rotunjeşte.
Este important ca atunci când avem mai multe ecuaţii ordinea acestora să respecte definirea parametrilor. Spre exemplu: A = B, C = D, D = B/2 necesită două rebuild-uri pentru obţinerea valorii finale a lui C. În altă ordine: A = B, D=B/2, C = D nu necesită decât o rulare a ecuaţiilor date.
3.4.2. Scrierea ecuaţiei pentru numărul de spiţe ale roţii
Se deschide modelul roţii creat anterior şi se editează schiţa care defineşte spiţa. Se adaugă o dimensiune liniară între linia din limita stângă a schiţei şi linia de axă, după care se plasează dimensiunea nou creată în partea dreaptă a liniei de axă.
Programul detectează că a doua entitate din setul dimensiunii liniare este o
linie de axă ceea ce are ca efect transformarea dimensiunii liniare între două linii într- o dimensiune de simetrie între linia din stânga şi simetrica sa faţă de linia de axă.

Modelarea şi simularea sistemelor robotice
175
Se editează dimensiunea de 210 mm prin click dreapta şi selectarea opţiunii Properties prin care se deschide meniul de mai jos în care se modifică în câmpul Name numele dimensiunii curente în Diametru_volan.

Popa Ion Florin, Marin Cornel, Filip Viviana
176
Se dă dublu click pe entitatea Circular Pattern prin care se multiplică spiţa iniţială în numărul de spiţe dorit de utilizator. Se modifică numele câmpului : nr_spite.
3.4.2.1. Scrierea ecuaţiei
Se apelează comanda de scriere a ecuaţiei din meniul Tools, Equations. Din meniul prezentat în figura de mai jos se poate alege Add, Edit sau Delete. În cazul unei noi ecuaţii se alege opţiunea Add prin care se deschide o nouă fereastră de dialog unde se poate scrie ecuaţia în câmpul destinat editării.
Se dă dublu click pe entitatea Circular pattern pentru afişarea dimensiunilor entităţii.
Se selectează parametrul care controlează numărul de spiţe – 3 – după care se tastează simbolul egal din meniul din stânga şi se dă dublu click pe entitatea Spita urmată de afişarea tuturor dimensiunilor ataşate schiţei şi solidului. Se va selecta ultima dimensiune introdusă pentru schiţa spiţei în speţă valoarea de 210 mm, după

Modelarea şi simularea sistemelor robotice
177
care se împarte acest parametru la 60 (adaugă simbolul „ / ” din meniul ferestrei curente).
Rezultatul introducerii ecuaţiei este realizarea unei dependenţe numerice între diametrul volanului şi numărul de spiţe.
Pentru a se face o verificare se editează diametrul volanului introducându-se
valoarea 420 mm. Rezultatul este modificarea numărului de spiţe, aşa cum se vede şi în figura de mai jos.

Popa Ion Florin, Marin Cornel, Filip Viviana
178
De remarcat faptul, aşa cum se vede şi în figura de mai jos, că în structura arborescentă SolidWorks Manager apare icon-ul Equations .
3.4.3. Aplicaţii
Să se realizeze modelele tridimensionale în SolidWorks ale pieselor prezentate mai jos utilizând entităţi solide de revoluţie:
Unităţi de măsură: inch

Modelarea şi simularea sistemelor robotice
179

Popa Ion Florin, Marin Cornel, Filip Viviana
180

Modelarea şi simularea sistemelor robotice
181

Popa Ion Florin, Marin Cornel, Filip Viviana
182
3.5. APLICAŢII ALE COMENZILOR
PRIMARE DE EDITARE
Se va realiza modelul solid de mai jos utilizând entităţi de tip SKETCH, EXTRUDE, CUT, FILLET.

Modelarea şi simularea sistemelor robotice
183
Toate entităţile mâner, tijă şi cap sunt simetrice faţă de axa centrală longitudinală şi de planul Top al modelului.
Mânerul este o entitate simplă rectangulară extrudată simetric faţă de planul schiţei.
Se defineşte extrudarea cu un unghi de înclinare (draft) egal pentru toate feţele laterale. Schiţa de bază este simetrică faţă de axa tijei. Axa tijei este folosită pentru poziţionarea mânerului faţă de cap, tija unind cele două entităţi.
3.5.1. Definirea schiţei primare
Se alege planul Top pentru sketch şi se defineşte un sketch-ul alăturat.
Se utilizează o linie de construcţie verticală care se va utiliza apoi ca
linie de oglindire prin selectarea ei şi selectarea icon-ului Mirror din toolbar-ul Sketch.
Se construieşte apoi jumătate din contur, cealaltă jumătate fiind automat
oglindită faţă de axa de simetrie.
Se va dimensiona schiţa conform cotelor impuse.
Se observă că schiţa este complet definită toate entităţile având culoarea neagră

Popa Ion Florin, Marin Cornel, Filip Viviana
184
3.5.2. Crearea entităţii solide Base Extrude
Se selectează icon-ul Boss/ Base din bara de instrumente Features. Se va selecta schiţa creată anterior pentru crearea extrudării şi se aleg
următorii parametri pentru extrudare conform figurii: - se alege opţiunea Mid Plane pentru direcţia de extrudare; - se impune 15 mm pentru mărimea totală a extrudării; - se impune un unghi de 8º pentru înclinarea feţelor laterale care se vor orienta
spre interior;
3.5.3. Definirea entităţii solide pentru Tijă
Pentru realizarea tijei se va utiliza o altă entitate de extrudare Boss. Se alege planul Front ca referinţă pentru sketchul pe care se defineşte solidul.
Se centrează sketch-ul – un cerc – în originea sistemului de coordonate Se dimensionează cercul astfel încât sketch-ul este complet definit. Se vor utiliza următoarele opţiuni pentru comanda de extrudare:
- extinderea extrudării până la următoarea suprafaţă existentă în modelul piesei (Up to Next);
- se vor reuni cele două solide (extrudări) care rezultă după extrudarea curentă;
- nu se aplică vreun unghi de înclinare pentru extrudare (draft zero).

Modelarea şi simularea sistemelor robotice
185
3.5.4. Realizarea entităţii solide pentru Cap
Entitatea solidă este tot o extrudare care se bazează pe o schiţă formată din linii şi arce tangente. Deoarece solidul este simetric faţă de planul Top în comanda de extrudare se va folosi tot opţiunea Mid Plane.

Popa Ion Florin, Marin Cornel, Filip Viviana
186
3.5.4.1. Realizarea schiţei
Se alege planul Top ca referinţă pentru schiţă.
Se alege reprezentarea Normal To pentru a avea o orientare avantajoasă pentru construcţia schiţei. Se poate utiliza ca şi în construcţia primei schiţe oglindirea unui contur faţă de o linie de axă. O altă variantă este construcţia schiţei fără oglindire şi introducerea ulterioară de relaţii geometrice de constrângere (tangenţă între arce şi linii, coincidenţa între centrele arcelor şi axa verticală a sistemului de coordonate) şi dimensionale care să definească complet schiţa.
3.5.4.2. Realizarea extrudării
Extrudarea se face similar primei extrudări. Se alege opţiunea Mid Plane pentru definirea extrudării cu grosimea de 20 mm şi un unghi de drafting de 6º direcţionat către interior. Este păstrată opţiunea de reuniune între entităţile solide (Merge results).

Modelarea şi simularea sistemelor robotice
187
3.5.4.3. Introducerea buzunarelor pentru Cap
Piesa finală conţine nişte buzunare care vor fi definite după cum urmează.
a. Definirea lamajului iniţial
Este ales ca plan de lucru suprafaţa superioară a ultimei entităţi solide.
Se realizează un offset de 2 mm selectând conturul exterior al suprafeţei superioare şi alegând direcţia de construcţie a offset-ului către interiorul conturului
Rezultă construcţia din figură care va fi utilizată pentru realizarea unui lamaj - “buzunar” – pentru suprafaţa superioară a zonei Cap.
b. Realizarea lamajului
Este folosit meniul Insert, Cut, Extrude sau din toolbar-ul Features prin selectarea icon-ului . Este realizat un lamaj cu adâncimea de 2 mm conform figurii de mai jos.

Popa Ion Florin, Marin Cornel, Filip Viviana
188
c. Definirea găurilor frezate
Schiţa utilizată pentru definirea găurilor conţine două cercuri concentrice cu arcele conturului lamajului având dimensiunile de pe figura de mai jos.
d. Realizarea găurilor
Se utilizează ca şi anterior comanda Cut Extrude cu opţiunile de pe figura de mai jos.

Modelarea şi simularea sistemelor robotice
189
e. Realizarea găurilor de trecere
Se alege ca plan de referinţă suprafaţa de găurilor înfundate realizate anterior.
Pe această suprafaţă se construieşte o schiţă sub forma unui cerc concentric cu cercul găurii înfundate cu diametrul de 9 mm.
Se utilizează comanda Cut Extrude conform figurii de mai jos.

Popa Ion Florin, Marin Cornel, Filip Viviana
190
Pentru crearea celei de a doua găuri se va utiliza opţiunea de copiere a entităţilor solide pe feţe plane.
Entităţi solide care conţin mai multe schiţe ca de exemplu Sweep şi Loft nu pot fi copiate, de asemenea nici entităţi de tip Draft.
Entităţile de tip Fillet şi Chamfer pot fi copiate.
Pentru a realiza copierea găurii de trecere se va selecta entitatea din arborele Feature Manager sau direct de pe piesă şi se va copia în memorie cu comanda Ctrl+C.

Modelarea şi simularea sistemelor robotice
191
Se alege apoi suprafaţa plană a găurilor înfundate pe care a fost creată prima gaură de trecere şi se dă Paste sau Ctrl + V.
În urma copierii unei entităţi sunt transportate toate relaţiile care au fost
definite pentru entitatea respectivă. La comanda de copiere a entităţii apare mesajul de pe figură datorită relaţiei de concentricitate a găurii de trecere cu cercul găurii înfundate. Programul nu ştie în acest moment care este perechea de entităţi între care se aplică relaţia de concentricitate. Una este cercul găurii, iar a doua urmează să fie stabilită de utilizator.

Popa Ion Florin, Marin Cornel, Filip Viviana
192
Există trei opţiuni:
- şterge relaţia de concentricitate; - lasă relaţia să fie copiată împreună cu entitatea solidă; - nu copiază entitatea solidă.
Dacă se alege opţiunea de ştergere a relaţiei geometrice rezultă entitatea solidă care va avea schiţa incomplet definită. Urmează să fie definită ulterior printr-o relaţie geometrică intrând în editarea schiţei.
î În urma copierii şi ştergerii relaţiei de concentricitate rezultă construcţia de
mai jos în care este evidenţiată entitatea solidă nou creată Cut-Extrude 5.
Urmează reparaţia schiţei din Cut-Extrude 5 prin redefinirea constrângerii geometrice de concentricitate între cercul găurii înfundate şi cercul găurii de trecere. O altă variantă este folosirea unei relaţii de coincidenţă între centrul cercului şi origine.
3.5.5. Introducerea rotunjirilor (Filleting)

Modelarea şi simularea sistemelor robotice
193
Fillet-urile aplicate piesei vor fi Insert, Features, Fillet sau prin selectarea
icon-ului Fillet din meniul Features.
3.5.5.1. Realizarea rotunjirilor pentru muchiile mari ale mînerului
3.5.5.2. Realizarea rotunjirilor pentru muchiile mici ale mânerului
Utilizarea opţiunii Tangent propagation din meniul Fillet aplică comanda de
rotunjire pentru toate muchiile tangente.

Popa Ion Florin, Marin Cornel, Filip Viviana
194
3.5.5.3. Realizarea rotunjirii pentru intersecţia mânerului cu tija şi a capului cu tija
O altă cale pentru aplicarea racordărilor pe piese este selecţia unei suprafeţe.
Rezultă racordarea tuturor muchiilor care aparţin acelei suprafeţe. Rezultă aplicarea unei racordări cu raza dorită pentru intersecţiile tijei cu celelalte entităţi solide. Programul rezolvă intersecţia dintre două racordări prin combinarea lor.

Modelarea şi simularea sistemelor robotice
195
Dacă se doreşte modificarea valorii razei de racordare pentru o entitate, se apelează editarea entităţii şi se utilizează opţiunea Multiple Radius Fillet.
3.5.6. Corelarea Dimensiunilor (Link Values)
Corelarea dimensiunilor poate fi utilizată pentru stabilirea egalităţii între două sau mai multe dimensiuni prin setarea aceluiaşi nume pentru tot setul de dimensiuni. Schimbând valoarea oricăreia dintre dimensiunile din set le schimbă pe toate. Corelarea dimensiunilor poate fi anulată prin setarea Unlink values.
Se va exemplifica corelarea dimensiunilor pentru piesa modelată anterior prin setarea aceleiaşi valori pentru unghiul de înclinare a feţelor laterale (drafting dimensions).
În vederea corelării dimensiunilor se vor afişa toate dimensiunile prin Show All Feature Dimensions prin poziţionarea cursorului pe componenta Annotations din Feature Manager şi accesarea meniului click dreapta al mouse-lui.
Se vor selecta cele două dimensiuni care urmează a fi corelate şi se dă un nume pentru setul format de aceste dimensiuni.

Popa Ion Florin, Marin Cornel, Filip Viviana
196
Se vor realiza modelele solide următoare utilizând sketch, comenzi primare de extrudare Boss, Cut şi comenzilor de editare Fillet, Chamfer.

Modelarea şi simularea sistemelor robotice
197
3.5.7. Aplicaţii

Popa Ion Florin, Marin Cornel, Filip Viviana
198

Modelarea şi simularea sistemelor robotice
199

Popa Ion Florin, Marin Cornel, Filip Viviana
200

Modelarea şi simularea sistemelor robotice
201
3.6. CONFIGURAŢII
Configuraţiile sunt utilizate cu piese şi ansambluri pentru a ascunde sau suprima entităţi şi componente.
Se pot realiza diferite scheme sau reprezentări de piese pentru fiecare configuraţie care să se denumească funcţie de cerinţele utilizatorului.
O piesă poate avea mai multe configuraţii. Configuraţiile apar listate în Managerul Configuraţiilor (Configuration).
Manager
Acesta este utilizat pentru a face selecţia configuraţiilor definite pentru o aceeaşi piesă sau ansamblu la nivelul piesei, ansamblului sau desenului 2D. Acestea pot fi create direct sau indirect prin tabelul de proiectare (design table).
Suprimarea sau desuprimarea entităţilor
Starea Suprimată – Suppressed (S) este utilizată pentru a îndepărta temporar o entitate. Atunci când este suprimată o entitate sistemul o tratează ca şi când nu ar exista.
Celelalte entităţi din structura arborescentă de definire a piesei – Feature manager – care sunt dependente de entitatea suprimată vor fi de asemenea suprimate. Entităţile suprimate din afişarea de pe piesă sunt de asemenea îndepărtate din memorie, eliberând resursele sistemului.
Entităţile suprimate pot fi desuprimate în orice moment.
Alte elemente configurabile
Suplimentar faţă de entităţi prin utilizarea configuraţiilor pot fi suprimate sau nesuprimate şi alte elemente: Ecuaţii - Constrângeri pe schiţe - Constrângeri externe ale schiţelor.
Dimensiuni ale schiţelor
Planele în care sunt realizate schiţele şi condiţiile de limitare a extrudărilor (Up to Surface, Up to Next, Offset from Surface, etc.) pot fi setate diferit pentru fiecare configuraţie.
3.6.1. Tabele de proiectare (Design tables)
Constau într-o altă metodă de a crea configuraţii a pieselor. Sunt în principal utilizate pentru a crea tipodimensiuni pentru familii de piese. De asemenea se pot suprima sau desuprima entităţi.

Popa Ion Florin, Marin Cornel, Filip Viviana
202
Configuraţiile pot exista atât pentru piese cât şi pentru ansambluri. Desenele 2D nu pot avea configuraţii dar vederile plane ale desenului pot afişa diferite configuraţii ale fişierelor pe care le reprezintă.
Configuraţiile pieselor
Reprezentarea a două sau mai multe variante ale piesei în acelaşi fişier.
După cum se observă din captura ecran în lista de configuraţii există Default şi unu care se referă la aceeaşi piesă Part 2.
Aceste configuraţii au fost realizate prin suprimarea unor entităţi de extrudare (Cut Extrude) din structura arborescentă de definire al piesei (Feature Manager).

Modelarea şi simularea sistemelor robotice
203
Fiecare configuraţie poate avea o culoare diferită de reprezentare a entităţilor. Pentru fiecare configuraţie nou introdusă există opţiunea de a suprima entităţile nou create într-o altă configuraţie conform exemplului.
Tabele de proiectare. Exemple
Se va realiza o familie de tipodimensiuni pentru o roată dinţată cu dinţi drepţi cu ajutorul ecuaţiilor şi a unui tabel de proiectare.

Popa Ion Florin, Marin Cornel, Filip Viviana
204
Pe baza parametrilor independenţi modul, m şi număr de dinţi, z s-a realizat familia de roţi dinţate conform figurii. Strategia de modelare a avut în vedere definirea profilului dintelui care este evolventic şi a fost trasat printr-o construcţie geometrică din reuniune de arce.
Acest solid poate fi completat cu nişte canale de pană sau caneluri funcţie de valoarea parametrilor din tabelul de proiectare funcţie de valoarea parametrilor din tabelul de proiectare.

Modelarea şi simularea sistemelor robotice
205
Completarea tabelelor de proiectarea
În completarea tabelelor de proiectare există trei opţiuni:
- inserarea unui tabel Excel vid; - inserarea unui tabel Excel cu toate dimensiunile definite pentru piesa curentă - inserarea unui tabel Excel creată în afara programului SolidWorks.
Acest tabel în format Excel este similar cu adăugarea unei entităţi OLE2 în SolidWorks, o procedură obişnuită în mediul Windows.
Prin urmare este creat un tabel Excel conform exemplului de mai jos în care pe prima linie este trecut titlul Design table for: roata‚ pe linia următoare începând din coloana B sunt inserate dimensiunile parametrizate ale entităţilor piesei curente, iar pe coloana A începând de rândul al treilea sunt trecute numele configuraţiilor. Prima configuraţie este denumită Default, adică configuraţie implicită.
În acest tabel de proiectare sunt posibile toate procedurile curente dintrun fişier Excel: formatare celule, scriere de ecuaţii, concatenare text, adăugare de comentarii ale proiectantului pentru a face mai uşoară interpretarea tabelului. Spre exemplu în figura de mai jos se remarcă utilizarea unei ecuaţii pentru parametrul D1@Cirpattern10, care constă în extragerea părţii întregi INT(D3/B3).

Popa Ion Florin, Marin Cornel, Filip Viviana
206
Prin adăugarea unei configuraţii în Tabelul de Proiectare (Design Table) este generată automat o nouă configuraţie în lista configuraţiilor disponibile din Configuration Manager. Dacă se editează tabelul de proiectare şi se modifică sau se şterge o anume configuraţie astfel încât aceasta dispare rezultatul în Managerul Configuraţiilor (Configuaration Manager) este că se păstrează configuraţia anterioară care nu mai are icon-ul Excel al tabelului de proiectare.
Pentru a şterge configuraţia şi din Managerul Configuraţiilor se selectează configuraţia şi cu tasta Delete se şterge.

Modelarea şi simularea sistemelor robotice
207
Tabele de proiectare în desene
Tabelul de proiectare al unei piese poate fi afişat în planşa unui desen 2D.

Popa Ion Florin, Marin Cornel, Filip Viviana
208
După selectarea unei vederi a unei piese se va selecta Insert, Design table şi se va plasa tabelul de proiectare în planşa desenului.
Prin dublu-click pe tabel acesta se deschide cu posibilitatea de editare a tabelului şi a configuraţiilor piesei ataşate acestuia.
Se poate edita configuraţia care este afişată în desen prin apelarea meniului Named View prin click-dreapta pe vederea dorită în care se va selecta din lista Use named configuration configuraţia dorită. Pentru celelalte vederi este necesară repetarea procedurii.
3.6.2. Controlul dimensiunilor într-un ansamblu
Dimensiunile pot fi controlate în trei moduri într-un ansamblu: - entităţi în context - link-area valorilor; - link values – ecuaţii.
Link values
Comanda lucrează între entităţi ale ansamblului şi constrângeri (mates). Poate controla valoarea constrângerilor de distanţă într-un ansamblu. Comanda nu lucrează între piese din cadrul unui ansamblu. Aceasta înseamnă că dacă avem doua entităţi în piese separate nu se poate să se utilizeze Link Values pentru a face dimensiunile egale. Atunci dacă intenţia de constrângere a ansamblului nu poate fi obţinută prin entităţi definite în context trebuie să se utilizeze o ecuaţie.
Ecuaţii într-un ansamblu
Ecuatiile algebrice pot fi utilizate pentru controlul dimensiunile în cadrul unui ansamblu. Căsuţa de dialog de scriere a ecuaţiilor într-un ansamblu este similară cu cea de la piese.
Se pot controla: - dimensiunile entităţilor ansamblului; - controlul valorilor constrângerilor (unghi sau distanţă).
Numele dimensiunilor într-un ansamblu
Singura diferenţă faţă de piese este că pe lângă numele entităţii din piesa mai este introdus şi numele piesei.
Pentru adăugarea ecuaţiilor într-un ansamblu trebuie să se căute în piese şi apoi în entităţile din piesă pentru a găsi dimensiunea dorită. Este de preferat să se schimbe numele implicit cu ceva mai pe înţeles.
3.6.3. Informaţii dintr-un ansamblu
O abundenţă de informaţii despre un ansamblu poate fi obţinută prin testare nedistructivă pe acel ansamblu. Înţelegerea ansamblului va ajuta atunci când sunt necesare schimbări de desen. Există câteva opţiuni pentru realizarea testării.

Modelarea şi simularea sistemelor robotice
209
Componente dependente de timp
Când se constrânge o componentă de o entitate dependentă de timp componenta poate fi doar poziţionată ca entitatea dependentă de timp şi este updatată.
Iată câteva entităţi dependente de timp: - entităţi ale ansamblului (decupare, gaură, sudură); - entităţi în - context şi piese; - geometrie de referinţă dependentă de ansamblu (plane, axe); - schiţe geometrice dependente de ansamblu; - paternuri de componente.
Cea mai buna cale este de a constrânge doar entităţile dependente de timp cand aceasta este singurul mod prin care se obţine structura dorită a ansamblului. Se poate edita poziţiile componentelor cu mai multă flexibilitate când entităţile dependente de timp nu sunt implicate deoarece atunci nu mai contează ordinea în care sunt evaluate constrângerile.
Relaţii de tip părinte-copil
Componentele ca de exemplu entităţile dintr-o piesă au relaţii de tip părinte-copil. Cel mai simplu component construit de jos în sus va avea doar grupul de constrângeri ca un copil. Alte componente care se bazeaza pe entităţile definite în ansamblu vor avea aceste entitati simple ca copii.
Reordonarea şi Rularea înapoi (Rollback)
Se pot reordona multe entităţi în Feature manager. Pot fi reordonate elemente ca plane ale ansamblului, axe, schiţe şi constrângeri din cadrul grupului de constrângeri. Planele de referinta implicite, originea ansamblului şi grupul de constrângeri implicit nu pot fi reordonate. Se pot reordona componentele şi astfel se poate controla ordinea în care apar în lista de materiale din desenul de execuţie.
Opţiunea Rollback poate fi utilizată pentru a realiza mutări de-a lungul entităţilor dependente de timp ca de exemplu entităţi de ansamblu şi entităţi bazate pe ansamblu.
3.6.4. Tabele de proiectare a ansamblurilor (Assembly design tables)
Tabelele de proiectare în ansambluri pot controla piesele, entităţile ansamblurilor şi pot lega dimensiunile. Poate fi setată starea, vizibilitatea şi configuraţia unei piese. Poate fi controlată starea entităţii unui ansamblu. De asemenea, constrangerea unei legături de tip distanţă sau unghi poate fi setată pentru fiecare configuraţie.
Tabelele de proiectare pot fi utilizate pentru:

Popa Ion Florin, Marin Cornel, Filip Viviana
210
- setarea stării de suprimare a componentelor de tip piesă; - setarea vizibilităţii componentelor de tip piesă; - alegerea unei configuraţii pentru o componentă de tip piesă; - a controla entităţile ansamblului; - a controla valorile parametrilor pentru constrângeri de distanţă şi unghi; - a adăuga comentarii la tabel.
Specificarea Componentelor
Toate funcţiile tabelelor de proiectare care permit specificarea numelui componentelor au următoarea sintaxă:
Comp <n> Comp<*> Comp<n-m> Comp<n,m>
Afecteaza doar copia n a componentei comp
Afecteaza toate copiile componentei comp
Afecteaza copiile componentei comp in domeniul n-m
Afecteaza copiile n si m componentei comp din lista de componente
In acest tabel comp este numele componentei, iar n si m sunt numărul de copii. Controlul componentelor de tip piesă
Componentele de tip piesă sunt foarte mult configurabile în tabelele de proiectare. Pot avea starea lor de configurare, supresie şi vizibilitate prin tabelul de proiectare. Este important de reţinut că numele piesei şi ale configuraţiilor sunt Case sensitive.
Sintaxa pentru capul de coloană Valori disponibile în casuţele celulelor
Implicit dacă celula este lasată
goală $CONFIGURATIONS@component <nr. copie>
Valide numele configuraţiilor care sunt case sensitive
nealocată
$STATE@component<nr. copie> Vizibilă <R> Suprimată <S> vizibilă
$SHOW@component<nr.copie> Da <Y>, Nu <N> nu
Controlul entităţilor ansamblului şi constrângerilor
Entităţile ansamblului pot fi suprimate sau nesuprimate utilizând un tabel de proiectare. Suplimentar dimensiunile entităţilor ansamblului şi constrângerile pot fi controlate printr-un tabel de proiectare. Doar constrângerile de distanţă şi unghi au dimensiuni asociate cu ele.

Modelarea şi simularea sistemelor robotice
211
Sintaxa pentru capul de coloană Valori disponibile în casuţele celulelor
Implicit daca celula este
lasată goală $STATE@numele_entitatii_din_ansamblu $STATE@numele_constrangerii
Suprimată S Nesuprimată U
Nesuprimată
$DIMENSION@ numele_entitatii_din_ansamblu $DIMENSION@ numele_constrangerii
Orice valoare zecimală pentru dimensiune
Zero (va genera o eroare dacă zero nu este o valoare legală pentru acea dimensiune)
Comentarii şi alte capete de tabel
Sintaxa pentru capul de coloană Valori disponibile în căsuţele celulelor
Implicit dacă celula este lasată goală
$COMMENT Orice caracter text Goală
$PARTNUMBER Orice caracter text Numele configuraţiei
$USER_NOTES poate fi utilizată fie ca un cap de coloană sau de rând
Orice caracter text Neevaluată
$NEVER_EXPAND_IN_BOM Yes (nu detaliază niciodata) No (permite detalierea)
No (permite expandarea)
$COLOR Intreg pe 32 de biti specificând culoarea RGB
Zero (negru)
Crearea şi inserarea tabelelor de proiectare
Tabelele de proiectare pot fi create direct “on the fly” utilizând Insert, New Design Table sau create în Excel şi inserate prin Insert, Design Table. Prima metodă utilizează dublul-click pentru a adăuga header-uri la tabel:
Dacă se dă click pe această entitate Este adăugat în tabelul de proiectare
Conţinut implicit al celulei sub capul de
tabel Componenta comp<7> din fereastra grafica $STATE@comp<7> Stare curenta: suprimata
sau rezolvata Entitatea ansamblului numita AF1 in Feature manager
$STATE@AF1 Stare curenta: suprimata sau nesuprimata
Dimensiunea entitatii ansamblului in fereastra grafica
D1@Cut2 Valoarea curenta
Dacă se dă click pe această entitate
Este adăugat în tabelul de proiectare
Conţinut implicit al celulei sub capul de tabel
Constrângere denumită în ConcentricFeature Manager
$STATE@Concentric5 Stare curentă: suprimată sau nesuprimată
Dimensiunea constrângerii în zona grafică
D3@Distance5 Valoarea curentă

Popa Ion Florin, Marin Cornel, Filip Viviana
212
Pentru componente, capul de tabel $STATE este întotdeauna aplicat doar pentru copia selectată.
Celelalte capete de tabel ca de exemplu CONFIGURATION, SHOW, COLOR, COMMENT şi USER_NOTES nu pot fi adăugate prin dublu-click ci trebuie introduse manual.
Dacă se dă dublu-click pe numele unui component dintr-un subansamblu rezultă un header de tipul: $STATE@full_cranck_assy<1>/cranck-arm<1> care produce eroare atunci când este închis tabelul deoarece nu se ştie ce identifică el -subansamblul sau componentul.
3.6.5. Biblioteci de componente (Library features)
Biblitecile de componente permite să se reutilizeze datele. Componentele care vor fi utilizate frecvent ar trebui considerate pentru
biblioteca de componente. Se poate utiliza biblioteca de componente pentru adăugarea de decupări, bosaje sau schiţe pe o piesă. Există două variante de a insera componente din bibliotecă:
- din paleta de componente; - din comanda Insert, Library Features.
Deşi paleta de componente este tot un fel de bibliotecă de componente, Library Feature este ceva diferit şi anume:
- este inserată utilizând o metodă diferită; - poate avea mai multe referinţe obligatorii în timp ce componentele din
paleta (Palette Features) au doar una; - pot fi inserate pe plane de referinţă în timp ce Palette Features pot fi
inserate doar pe feţe plane. Când se inserează Library Features se poate constata două tipuri de referinţe:
Obligatorii – sunt referinţe fără de care entitatea nu poate fi creată. Aceasta stabileşte definiţia planului entităţii. Trebuie să se identifice planul corespunzător pe piesa pe care se inserează componenta din bibliotecă. Alte exemple de referinţe obligatorii sunt: muchii pentru racordări şi teşituri ale suprafeţei finale în cazul tipului de extrudare Up to Surface.
Opţionale – se referă la referinţe din afara bibliotecii de componente care nu sunt necesare pentru crearea componenţei pe piesă. Dacă nu se specifică componenta opţională la inserare, relaţia va fi nedefinită, dar poate fi reparată uşor şi entitatea este creată şi fără definirea acestei relaţii.

Modelarea şi simularea sistemelor robotice
213
Faţă de Library Features, Palette Features au doar o referinţa obligatorie şi mai multe opţionale. Referinţa obligatorie este planul schitei (sketch plane) pe care este aplicată componenta din bibliotecă.
Crearea unei componente pentru Library Feature se face selectând componenta de pe piesă şi se salvează ca Lib Feat Part. Utilizatorul este avertizat că programul va introduce simplificări pentru componenta care este introdusă în librărie şi îndepărtează geometria care nu este necesară.
Palette Features sunt o formă de Library Features accesate din meniul special Feature Palette. Fereastra Feature Palette este un meniu dedicat stocării şi inserării uşoare de componente din bibliotecă pentru crearea de entităţi pe piese.
Componentele din biblioteca Palette Features pot fi adăugate pe piesa prin simpla dragare şi aplicare pe o faţă plană a modelului.
Puterea şi utilitatea Palette Features constă în crearea şi utilizarea propriilor directoare şi librării de componente. Structura Features Palette este împărţită implicit în trei directoare:
- Palette Features - Palette Forming Tools - Palette Parts
Directorul Palette Features conţine toate componentele distribuite cu fereastra de componente Feature Palette şi include ca subdirectoare: Holes, Machined Shafts, Dhapes si Sheet Metal. Toate componentele au extensia *.sldlfp.
Palette Parts furnizate cu fereastră se află în subdirectoarele din directorul Palette Parts.
Pentru piese din table (sheet metal) programul are un set de scule de formare prin ambutisare (Forming Tools) în care sunt incluse diverse tipuri de nervuri, gropiţe, găuri profilate etc.
Fiecare componentă din biblioteca Feature Pallette are afişat un icon care este captura 3D a entităţii realizate.
Organizarea librăriilor
Se poate controla calea de căutare a librăriilor selectând o cale de căutare în Tools, Options, System Options, File Locations.
În lista directoarelor (Folders) din fereastra meniului de căutare se pot adăuga şi alte căi pentru:
Scule de ambutisare (Palette Forming Tools) Piese componente (Palette Parts) Paleta de Entităţi (Palette Features) Blocuri (Blocks)

Popa Ion Florin, Marin Cornel, Filip Viviana
214
Machete de documente (Document Templates) Tabele de îndoire a tablelor (Bend Tables) Formate de desenare (Sheet Format)
Există două moduri de crearea a componentelor din bibliotecă (library features):
- entitatea să includă dimensiunile şi referinţele necesare pentru localizarea sa pe piesa pe care se inserează, iar acestea să fie actualizate la inserare;
- să nu includă referinţe externe în componenta din bibliotecă şi să le adauge pe cele necesare în timpul operaţiei de editare a schiţei.
Editarea Paletei de Componente
Paleta de componente poate fi deschisă şi editată direct din fereastra Feature Palette. Toate modificările făcute vor afecta toate copiile viitoare ale entităţii dar nu cele deja existente. Orice element din paleta de componente (piesă, entitate, forma de ambutisare pentru table) poate fi deschisă prin editare. Dând click-dreapta pe icon şi selectând Edit Palette Item din meniul click-dreapta, se deschide componenta care urmează a fi editată. Modificarea dimensiunilor unei componente din bibliotecă se face prin Edit Dimension Acces care pot fi setate ca Dimensiuni Interne sau Definite de utilizator la inserare. Cele Interne aparţin strict entităţii din bibliotecă şi nu pot fi modificate la inserarea pe piesă.
Implicit toate dimensiunile sunt pregătite pentru modificare la inserare, dar se pot transforma în dimensiuni interne din meniu.
Pentru o interfaţă mai utilă se poate modifica numele dimensiunilor.

Simularea structurilor mecanice din robotică utilizând COSMOS WORKS
4

Modelarea şi simularea sistemelor robotice
217
4.1. ANALIZA STATICĂ
Etapele de realizare a analizei sunt:
• Alegerea materialului piesei utilizând SolidWorks Materials Editor; • Crearea unui studiu de analiză statică; • Aplicarea restricţiilor şi solicitărilor la compresie; • Setarea opţiunilor de divizare în elemente finite şi divizarea piesei; • Rularea aplicaţiei; • Vizualizarea rezultatelor de bază ale analizei statice.
Piesa de tip suport, fabricată din oţel aliat este fixată în cele două găuri şi solicitată la o presiune de 1000 psi aşa cum se vede din figura de mai jos.
4.1.1. Deschiderea unei noi aplicaţii (part) şi alegerea materialului
Pentru alegerea oţelului aliat din biblioteca de materiale SolidWorks se parcurg următorii paşi:
1. Se dă click pe icon-ul Edit Material de pe bara de instrumente Solid Works Standard. Se va deschide fereastra de dialog Materials Editor PropertyManager;
2. Sub Materials se vor parcurge următorii paşi: a. Se selectează SolidWorks Materials din meniul drop-down; b. Se dă click pe semnul plus de lângă opţiunea Steel şi se selectează
Alloy Steel. Proprietăţile mecanice ale oţelului aliat (Alloy Steel) apar în fereastra Physical
Properties. 3. Se dă click pe OK .

Popa Ion Florin
218
Numele materialului ales apare în structura arborescentă FeatureManager
Pentru a realiza un studiu static:
1. Se dă click pe icon-ul COSMOSWorks Manager .
2. Se dă click pe Study de pe bara de instrumente principală COSMOSWorks. Apare fereastra de dialog Study.
3. Sub Study name, se va edita un nume pentru studiu, spre exemplu, Static1.
4. Sub Analysis type, se selectează opţiunea Static. 5. Sub Mesh type, se selectează opţiunea Solid mesh. 6. Se dă click pe OK.

Modelarea şi simularea sistemelor robotice
219
COSMOSWorks realizează studiul în structura arborescentă COSMOSWorks Manager. A se nota faptul că un semn de verificare apare pe icon-ul Tutor1 din folder-ul Solids, iar numele materialului şi biblioteca sursă sunt afişate lângă el.
4.1.2. Aplicarea restricţiilor
Pentru analiza statică trebuie aplicate restricţii adecvate care să stabilizeze modelul. În acest exemplu se fixează cele două găuri la baza piesei.
Pentru a fixa cele două găuri:
1. Se dă click pe icon-ul Restraints de pe bara de instrumente COSMOSWorks. Apare Restraint PropertyManager.
2. Sub Type, se selectează Immovable (fără Translaţie). 3. În zona grafică, se dă click pe suprafeţele ce definesc găurile, aşa cum se
poate vedea şi în figura de mai jos .
Face<1> şi Face<2> apar în fereastră, în zona de dialog Faces, Edges,
Vertices for Restraint .

Popa Ion Florin
220
Pentru a schimba culoarea simbolurilor ce vizualizează restricţiile se dă click pe Edit. Se va deschide o paletă de culori. Se va selecta culoarea dorită şi se dă click pe OK
4. Se dă click pe OK .
COSMOSWorks fixează suprafeţele ce definesc cele două găuri şi creează un icon numit Restraint-1 în folder-ul Load/Restraint din structura arborescentă COSMOSWorks Manager.
4.1.3. Aplicarea presiunii
Se va aplica o presiune de 1000 psi normală la suprafaţa circulară a piesei suport, aşa cum se vede în figura de mai jos.
Pentru a aplica presiunea:
1. Se dă click pe icon-ul Pressure de pe bara de instrumente COSMOSWorks Loads. Apare Pressure PropertyManager.
2. Sub Pressure Type, se dă click pe opţiunea Normal to selected face. 3. În zona grafică, se selectează suprafaţa din faţă a cilindrului aşa cum se
vede în figura de mai jos.
Face<1> apare în fereastră, în zona de dialog Faces for Pressure .
4. Sub Pressure Value, se selectează din Units unitatea de măsură (IPS)
şi apoi se editează valoarea 1000 în zona de dialog Pressure value .

Modelarea şi simularea sistemelor robotice
221
Dacă se schimbă unitatea de măsură după editarea valorii, CosmosWorks converteşte valoarea în unităţile noi de măsură.
5. Se dă click pe OK .
COSMOSWorks aplică o presiune de 1000 psi şi creează un icon cu numele Pressure-1 în folder-ul Load/Restraint din structura arborescentă COSMOSWorks Manager.
4.1.4. Setarea opţiunilor de divizare (Meshing)
Divizarea depinde de opţiunile de divizare activă.
Pentru a stabili opţiunile de divizare:
1. Se dă click pe icon-ul Tutor1 din partea superioară a structurii arborescente şi se selectează Options. Apare ferestra de dialog Options.
2. Se dă click pe butonul Mesh. 3. Sub Mesh quality, se selectează High. 4. Sub Mesher type, se selectează Standard. 5. Se selectază Jacobian check la 4 Points. 6. Sub Mesh control, se selectează Smooth surface. 7. Se dă click pe OK.
Divizarea piesei
COSMOSWorks utilizează opţiunile de divizare activă pentru a crea divizarea.
Pentru a diviza piesa şi a rula analiza statică:

Popa Ion Florin
222
1. Se dă click pe icon-ul Mesh de pe bara de instrumente COSMOSWorks. Apare Mesh PropertyManager care sugerează valorile
Global Size şi Tolerance . 2. Se dă click pe OK .
Începe divizarea şi apare fereastra Mesh Progress. Când divizarea este completă, COSMOSWorks afişează modelul divizat aşa cum se poate vedea în figura de mai sus.
4.1.5. Rularea studiului
Pentru a rula studiul:
1. Se dă click pe icon-ul Run de pe bara de instrumente COSMOSWorks. Începe analiza şi apare un indicator de progres. Când analiza este completă apare o fereastră de mesaj
2. Se dă click pe OK. 4.1.6. Vizualizarea rezultatelor
După rularea cu succes a analizei statice, COSMOSWorks crează folderele Stress, Displacement, Strain, Deformation, şi Design Check în structura arborescentă COSMOSWorks Manager.
4.1.6.1. Vizualizarea solicitărilor von Mises (echivalente)
Pentru a prezenta eforturile von Mises:
1. În structura arborescentă COSMOSWorks Manager, se dă click pe semnul plus de lângă folderul Stress. Apare Plot1.
2. Se dă dublu-click pe Plot1. Este afişată diagrama de solicitare von Mises aşa cum se vede în figura de
mai jos

Modelarea şi simularea sistemelor robotice
223
Pentru a vizualiza diagrama de solicitare într-un sistem de unităţi diferit se dă click-dreapta pe icon-ul Plot şi se selectează Edit Definition. În fereastra Display se stabilesc unităţile (Units) în sistemul dorit de unităţi de măsură şi se dă click pe OK. 4.1.6.2. Vizualizarea deplasărilor rezultante (Resultant Displacement)
Pentru a reprezenta grafic deplasarea rezultantă:
1. În structura arborescentă COSMOSWorks Manager, se dă click pe semnul plus de lângă folder-ul Displacement. Apare Plot1.
2. Se dă dublu-click pe Plot1. Este afişat graficul deplasării rezultate aşa cum se vede în figura de mai jos.
Pentru a anima graficul deplasării rezultante:
1. Se dă click pe icon-ul Animate de pe bara de instrumente COSMOSWorks Result Tools. Apare Animation PropertyManager.
2. Se salvează sub formă unui fişier AVI şi se caută o locaţie pentru a salva animaţia.
3. Se dă click pe icon-ul Play pentru a porni animaţia.
4. Se dă click pe icon-ul Stop pentru a opri animaţia. 5. Se dă click pe OK pentru a închide Animation PropertyManager.

Popa Ion Florin
224
4.1.6.3. Vizualizarea deformărilor elementelor echivalente (Equivalent Element Strains)
Pentru a reprezenta grafic deformările elementelor echivalente: 1. În structura arborescentă COSMOSWorks Manager, se dă click pe semnul
plus de lângă folderul Strain. Apare Plot1.
2. Se dă dublu-click pe Plot1. Este afişat graficul deformărilor echivalente.

Modelarea şi simularea sistemelor robotice
225
4.1.7. Evaluarea siguranţei designului (Safety of the Design)
Fereastra Design Check ajută la evaluarea siguranţei designului.
Pentru a vizualiza distribuţia factorului de siguranţă - Factor of Safety (FOS) din model:
1. Se dă click pe semnul plus de lângă folder-ul Design Check. Apare icon-ul Plot1.
2. Se dă dublu-click pe Plot1. Este afişată diagramă de mai jos.
Pentru a reprezenta grafic regiunile critice – la solicitare – ale piesei:
1. Se dă click pe icon-ul Design Check Wizard de pe bara de instrumente COSMOSWorks Result Tools. Apare Design Check PropertyManager.
2. În fereastra Step 1 of 3 se va proceda astfel:
a. Se stabileşte Criterion la valoarea Maximum von Mises stress. Apare Design Goal corespunzător criteriului selectat.
b. Se dă click pe icon-ul . 3. În fereastra Step 2 of 3, se va proceda astfel:
a. Se selectează Yield strength sub Set stress limit.
De notat că proprietăţile elastice ale materialului piesei şi eforturile maxime von Mises sunt listate.

Popa Ion Florin
226
b.Se dă click pe icon-ul .
4. În ferestra Step 3 of 3, se dă click pe Areas below factor of safety şi se va asigura că valoarea 1 apare în ferestra de valori. Ferestra de listare afişează factorul de siguranţă minim al modelului bazat
pe criteriul selectat. 5. Se dă click pe OK pentru a închide Design Check PropertyManager.
Zonele cu un factor de siguranţă mai mic decât valoarea 1 (zone nesigure) sunt prezentate cu culoarea roşu. Zonele cu un factor de siguranţă mai mare (zone sigure) sunt prezentate cu culoarea albastru.
4.1.8. Generarea unui raport de studiu (Study Report)
Pentru a genera un raport de studiu:
1. Se dă click pe icon-ul Report de pe bara de instrumente COSMOSWorks Result Tools. Apare ferestra de dialog Report.
2. În Settings se verifică item-ul care se doreşte a fi inclus şi se introduc informaţiile legate de acel item în ferestra Preview.
3. Pentru a modifica conţinuturile oricărui item se dă click pe Set. Apare ferestra de dialog Set a item-ului selectat.
4. Se introduce informaţia dorită şi se dă click pe OK. 5. Se repetă paşii 2-4 pentru subiectele dorite. 6. În Report file name, se introduce un nume pentru fişierul raportului, de
exemplu MyStudyReport.htm. 7. Se dă click pe OK. 8. Pentru a închide fereastra de raport se dă click pe .

Modelarea şi simularea sistemelor robotice
227
4.2. ANALIZA STATICĂ A UNUI ANSAMBLU
Se consideră subansamblul de tip roată prezentat mai jos.
Etapele de realizare a analizei sunt: • Utilizarea materialelor SolidWorks în COSMOSWorks • Aplicarea forţelor direcţionale • Excluderea unei componente a ansamblului pentru analiză • Listarea reacţiunilor • Alegerea hărţii de culori a unui grafic de tensiuni sau deplasări • Generarea unui grafic de tensiuni sau deplasări într-o secţiune • Verificarea rezultatelor de pe un grafic de tensiuni sau deplasări într-o
secţiune.
4.2.1. Crearea unui studiu static

Popa Ion Florin
228
Pentru a crea un studiu static:
1. Se dă click pe icon-ul COSMOSWorks Manager . 2. În structura arborescentă COSMOSWorks Manager se dă click-dreapta pe
icon-ul Crank şi se selectează Study. Apare caseta de dialog Study.
3. Sub Study name, se va edita un nume pentru studiu, spre examplu, Static-2. 4. Sub Analysis type, se selectează opţiunea Static. 5. Sub Mesh type, se selectează opţiunea Solid mesh. 6. Se dă click pe OK.
COSMOSWorks introduce un icon pentru studiu în structura arborescentă COSMOSWorks Manager. Pentru documentele ansamblului, folder-ul Solids conţine un icon pentru fiecare componentă a ansamblului. Apare un icon
Contact/Gaps în structura arborescentă COSMOSWorks Manager. Implicit, COSMOSWorks presupune că părţile componente ale ansamblului sunt legate în punctele de contact iniţial.
4.2.2. Alegerea materialelor
Se observă că folder-ul Solids din structura arborescentă COSMOSWorks Manager prezintă automat materialul ales pentru fiecare componentă a ansamblului.

Modelarea şi simularea sistemelor robotice
229
Pentru a vizualiza proprietăţile materialului ales pentru fiecare componentă:
1. În structura arborescentă COSMOSWorks Manager se dă click-dreapta pe icon-ul componentei dorite, de exemplu, CrankPulley şi se selectează Apply/Edit Material.
Se deschide fereastra de dialog Material. 2. Sub Material model se selectează sistemul de unităţi de măsură care se
doreşte a fi utilizat pentru a vizualiza proprietăţile materialului, spre exemplu, se va selecta English (IPS).
COSMOSWorks afişează numele materialului ales pentru piesa aleasă, din caseta Material name şi listează proprietăţile mecanice ale acestuia în tabelul de proprietăţi ale materialului.
3. Se dă click pe OK.
4.2.3. Aplicarea restricţiilor
Se va fixa faţa exterioară a roţii, aşa cum se vede în figura de mai jos.
Pentru a fixa faţa exterioară a roţii:
1. În structura arborescentă COSMOSWorks Manager se dă click-dreapta pe Load/Restraint şi se selectaeză Restraints.
Apare caseta Restraint PropertyManager. 2. Sub Type se selectează opţiunea Immovable (No translation). În zona grafică se selectează suprafaţa cilindrică exterioară a roţii prezentată în
figură.

Popa Ion Florin
230
Apare Face<1> în zona de dialog Faces, Edges, Vertices for Restraint .
4. Se dă click pe OK .
4.2.4. Aplicarea unei forţe direcţionale
Se aplică o forţă de 200 lb pe faţa pedalei.
Pentru a aplica o forţă pe pedală:
1. Dacă este necesar, se schimbă imaginea ansamblului cu o imagine având o
orientare trimetrică, dând click pe icon-ul Trimetric de pe bara de instrumente Standard Views.
2. În structura arborescentă COSMOSWorks Manager se dă click-dreapta pe
Load/Restraint şi se selectează Force.

Modelarea şi simularea sistemelor robotice
231
Apare caseta de dialog Force PropertyManager. 3. Sub Type, se dă click pe Apply force/moment.
4. Se dă click în zona de dialog Faces, Edges, Vertices for Force , apoi click pe faţa bolţului de sus aşa cum se observă în figura de mai jos.
2. Se dă click în zona de dialog Face, Edge, Plane, Axis for Direction , apoi se selectează Plane1 al ansamblului din FeatureManager.
3. Sub Units se selectează ca unitate de măsură, English (IPS).
4. Sub Force (Per entity) se dă click pe Along plane Dir 1 şi se stabileşte valoarea magnitudinii forţei la 200. Semnul minus indică faptul că forţa acţionează în direcţie opusă lui Dir1 a
planului Plane1. 5. Se dă click pe OK .
COSMOSWorks aplică o forţă de 200 lb pe faţa selectată aşa cum se vede şi în figura de mai jos.

Popa Ion Florin
232
4.2.5. Divizarea ansamblului în elemente finite
Implicit, COSMOSWorks presupune că părţile componente sunt legate în zonele lor iniţiale de contact. Tipul implicit al contactului apare lângă icon-ul Contact/Gaps (-Global:Bonded-).
Pentru a împărţi ansamblul în elemente finite:
1. În structura arborescentă COSMOSWorks Manager se dă click-dreapta pe Mesh şi se selectează Create. Apare caseta de dialog Mesh PropertyManager.
2. Pentru a stabili opţiunile de divizare se dă click pe Options. Apare caseta de dialog Options.
3. Sub Mesh quality, se dă click pe High. 4. Sub Mesher type, se dă click pe Standard. 5. Se stabileşte Jacobian Check la 4 Points. 6. Sub Mesh control se verifică Smooth Surface.

Modelarea şi simularea sistemelor robotice
233
7. Se dă click pe OK. 8. Se verifică fereastra Run analysis after meshing. 9. Se dă click pe OK pentru a accepta implicit valorile indicate pentru Global
Size şi Tolerance .
Începe procesul de divizare în elemente finite. Când divizarea este completă,
analiza începe automat. Când analiza este completă se va da click pe OK.
4.2.6. Vizualizarea rezultatelor
Pentru a se vizualiza tensiunile von Mises:
5. În structura arborescentă COSMOSWorks Manager, se dă click-dreapta pe Load\Restraint şi se selectează Hide All - pentru a ascunde simbolurile restricţiilor şi încărcărilor iniţiale.
6. Se dă click pe semnul plus de lângă folder-ul Stress. Apare Plot1.
3. Se dă dublu-click pe Plot1. Este afişat graficul tensiunilor von Mises.
4. Se dă click-dreapta pe icon-ul Plot1 şi se selectează Edit Definition. Apare Stress Plot PropertyManager.
9. Sub Display, se stabilesc unităţile de măsură din Units în psi, apoi se dă click pe OK .
10. Se dă click pe icon-ul Rotate View şi se roteşte ansamblul pentru o mai bună vizualizare a tensiunilor.

Popa Ion Florin
234
4.2.7. Excluderea unei componente pentru analiză
Graficul tensiunilor arată că piesa CrankPulley-1 are tensiuni mici. Se exclude CrankPulley-1 şi se reanalizează studiul.
Pentru a exclude componenta CrankPulley-1:
7. Se dă click pe icon-ul FeatureManager . 8. În structura arborescentă FeatureManager design, se dă click-dreapta pe
CrankPulley<1> şi se selectează Suppress.
Apare un mesaj de interogare - de a se salva sau nu piesa CrankPulley înainte de a o închide. Se dă click pe Yes pentru a salva documentul.
6. Se dă click pe COSMOSWorks Manager.
Apare un mesaj de avertizare care informează că modelul a fost modificat, iar tensiunile şi restricţiile vor fi reactualizate. Se dă click pe OK pentru a închide ferestra de mesaj.
Apare un alt mesaj care informează că Restraint-1 a fost exclus. Se dă click pe OK pentru a închide ferestra de mesaj.
Apare un semn pe icon-ul restricţiei excluse (Restraint-1) în structura arborescentă COSMOSWorks Manager.

Modelarea şi simularea sistemelor robotice
235
4. În structura arborescentă COSMOSWorks Manager se dă click-dreapta pe Restraint-1 şi se selectează Delete. Se dă click pe Yes pentru confirmare.
Ansamblul curent este prezentat în figura de mai jos.
4.2.7.1. Restricţionarea noului model
Se restricţionează o faţă a componentei CrankArmAxle.
Pentru a restricţiona modelul:
1. În structura arborescentă COSMOSWorks Manager se dă click-dreapta pe Load/Restraint şi se selectează Restraints.
Apare Restraint PropertyManager. 2. Se stabileşte Type cu opţiunea Immovable (No translation). 3. În zona grafică se selectează faţa prezentată în figura de mai jos.
5. Se dă click pe OK .

Popa Ion Florin
236
4.2.7.2. Divizarea noului model în elemente finite şi efectuarea studiului
Din moment ce geometria modelului a fost modificată, modelul trebuie divizat din nou.
Pentru a diviza modelul şi efectuarea studiului:
1. În structura arborescentă COSMOSWorks Manager se dă click-dreapta pe Mesh şi se selectează Create. Apare un mesaj de avertizare care informează că redivizarea şterge
rezultatele existente. 2. Se dă click pe OK.
Apare Mesh PropertyManager. 6. Se verifică Run analysis after meshing. 7. Se dă click pe OK .
Pentru o comparare corectă a rezultatelor se utilizează aceeaşi mărime globală utilizată în analiza anterioară.

Modelarea şi simularea sistemelor robotice
237
Când divizarea este completă, COSMOSWorks avertizează că transferul de material pentru piesa CrankPulley nu s-a efectuat. Se dă click pe OK.
Când analiza este completă, se dă click pe OK.
4.2.7.3. Vizualizarea rezultatelor noului model
Pentru a vizualiza tensiunile von Mises:
În structura arborescentă COSMOSWorks Manager se dă dublu-click pe Plot1 din folder-ul Stress.
Este afişat graficul tensiunilor von Mises.
Compararea cu rezultatele anterioare ilustrează modificări mici.
4.2.7.4. Listarea reacţiunilor
Se vor lista reacţiunile de pe model.
Pentru a lista reacţiunile:
1. În structura arborescentă COSMOSWorks Manager, se dă click-dreapta pe folder-ul Displacement şi se selectează Reaction Force.
Apare fereastra de listare Reaction Force. 2. Se stabilesc unităţile de măsură din Units în lb.

Popa Ion Florin
238
În zona grafică, se selectează faţa cilindrică a piesei CrankArmAxle aşa cum se vede în figură.
4. Se dă click pe Update. Reaction Force listează reacţiunile de pe faţa selectată precum şi pe cele de pe
întregul model.
Listarea arată că, componenta X a reacţiunii este dominantă, foarte apropiată ca magnitudine şi opusă ca semn forţei aplicate (-200 lbs).
5. Se dă click pe Close.

Modelarea şi simularea sistemelor robotice
239
4.2.7.5. Alegerea hărţii de culori a unui grafic de tensiuni sau deplasări
Se va alege harta de culori pentru graficul tensiunilor.
Pentru alegerea hărţii de culori pentru graficul tensiunilor:
1. Se dă click-dreapta pe Plot1 din folder-ul Stress şi se selectează Chart Options. Apare Chart Options PropertyManager.
7. Sub Chart Options se dă click pe icon-ul pentru a poziţiona legenda graficului în partea din stânga a ferestrei graficului.
8. Sub Color Options se procedează astfel: a. Se selectează User Defined.
b. Se stabileşte numărul culorilor (No. of chart colors) la 3. c. Se stabileşte numărul culorilor de bază (Base Color) la 3.
Apare grila de 3 culori. Se dă click pe cea mai din dreapta cutie de culoare (înaintea cutiilor albe), se
selectează culoarea roşie din paleta de culori şi se dă click pe OK.
Culoarea cea mai din dreapta este utilizată pentru valorile cele mai mari ale tensiunilor.
4. Se dă click pe OK .

Popa Ion Florin
240
Graficul tensiunilor este generat cu noua hartă de culori.
4.2.7.6. Generarea unui grafic de tensiuni într-o secţiune Pentru a genera un grafic al tensiunilor cu harta de culori implicită:
1. În structura arborescentă COSMOSWorks Manager se dă click-dreapta pe folder-ul Stress şi se selectează Define. Apare Stress Plot PropertyManager.
2. În ferestra Display se va proceda astfel:
a) Se va asigura că Component este setat pentru VON: von Mises stress.
b) Se stabilesc unităţile de măsură - Units
în psi. 8. Se dă click pe OK .
Apare icon-ul Plot2 în folder-ul Stress iar graficul este afişat în zona grafică.

Modelarea şi simularea sistemelor robotice
241
Pentru a genera graficul de tensiuni într-o secţiune:
1. În structura arborescentă COSMOSWorks Manager, se dă click-dreapta pe icon-ul Plot2 din folder-ul Stress şi se selectează Section Clipping.
Apare Section PropertyManager. 2. Se împarte structura arborescentă COSMOSWorks Manager pentru a afişa şi
structura arborescentă FeatureManager design.
Pentru a împărţi structura arborescentă COSMOSWorks Manager, se plasează mouse-ul în partea superioară a structurii arborescente COSMOSWorks Manager până când acesta se schimbă în punct. Se trage bara în jos sub ultimul item din structura arborescentă FeatureManager design. Se eliberează apoi mouse-ul pentru a afişa structura arborescentă FeatureManager design, deasupra Section PropertyManager.
3. În structura arborescentă FeatureManager design se dă click pe Plane3. Plane3 apare în fereastra de selecţie sub Section 1. 4. În ferestra Section 1 se procedează astfel:
a) Se dă click pe zona de selecţie de lângă Distance pentru a muta secţiunea paralelă cu planul Plane3.

Popa Ion Florin
242
b) Se dă click pe zona de selecţie de lângă X Rotation pentru a roti secţiunea în jurul axei X.
c) Se dă click pe zona de selecţie de lângă Y Rotation pentru a roti secţiunea în jurul axei Y.
Axele X şi Y sunt definite în planul secţiunii selectate (Plane 3). Ele nu se referă la axele globale X şi Y ale planului Plane 1 al ansamblului.
9. Sub Options, se deselectează opţiunea Show section plane. 10. Se dă click pe OK .
Este afişat următorul grafic al tensiunilor într-o secţiune.
4.2.7.7. Verificarea graficului tensiunilor într-o secţiune
Se verifică cum arată graficul tensiunilor într-o secţiune prin Settings
PropertyManager.
Pentru a verifica graficul tensiunilor într-o secţiune:
1. În structura arborescentă COSMOSWorks Manager, se dă click-dreapta pe Plot2 din folder-ul Stress şi se selectează Settings.
Apare Settings PropertyManager.

Modelarea şi simularea sistemelor robotice
243
9. Sub Boundary options, se selectează opţiunea None. 10. Sub Deformed plot options se procedează astfel:
a. Se verifică Superimpose model on the deformed shape. b. Se verifică dacă este selectată opţiunea Translucent (Single color) şi se
mută cursorul către mijlocul scării de valori. 11. Se dă click pe OK .
Este afişat următorul grafic al tensiunilor într-o secţiune.

Popa Ion Florin
244
4.2.7.8. Probarea rezultatelor tensiunilor de pe un grafic al tensiunilor
Se utilizează icon-ul Probe pentru a proba valorile tensiunilor de pe un grafic al tensiunilor, după cum urmează:
1. În structura arborescentă COSMOSWorks Manager se dă click-dreapta pe Plot2 din folder-ul Stress şi se selectează Probe.
Apare fereastra de listare Probe.
12. În zona grafică, se dă click pe graficul tensiunilor dintr-o secţiune în locaţii diferite. În ferestra de listare apar valorile tensiunilor von Mises şi coordonatele
punctului selectat în sistemul global de coordonate.
9. Se dă click pe Plot. Se deschide fereastra grafică Probe Result. Tensiunile von Mises sunt
prezentate grafic. Graficul nu prezintă distanţa actuală dintre noduri.

Modelarea şi simularea sistemelor robotice
245
11. Se închide fereastra grafică. 12. Se dă click pe Close din ferestra de dialog Probe.

Popa Ion Florin
246
4.3. ANALIZA DE FRECVENŢĂ
Analiza frecvenţei, deasemenea cunoscută ca analiză dinamică sau modală, calculează frecvenţele de rezonanţă (naturale) şi modurile de deformare corespunzătoare acestor frecvenţe.
Etapele de realizare a analizei sunt: • Crearea unui studiu de analiză a frecvenţei • Efectuarea analizei de frecvenţă • Vizualizarea rezultatelor analizei de frecvenţă • Listarea factorilor de masă participanţi • Evaluarea acurateţei rezultatelor
4.3.1. Crearea unui studiu de analiză a frecvenţei
Pentru a crea un studiu de analiză a frecvenţei:
1. Se dă click pe icon-ul COSMOSWorks Manager .
2. Se dă click pe icon-ul Study de pe bara de instrumente COSMOSWorks Main.
Apare caseta de dialog Study. 3. Sub Study name se editează un nume pentru studiu, de exemplu Freq-1.

Modelarea şi simularea sistemelor robotice
247
4. Sub Analysis type se selectează opţiunea Frequency. 5. Sub Mesh type se selectează opţiunea Solid mesh. 6. Se dă click pe OK.
COSMOSWorks realizează studiul în structura arborescentă COSMOSWorks Manager.
4.3.2. Alegerea materialului
Ansamblul arbore-lagăre este realizat din oţel de tip AISI 1020.
Pentru a alege oţelul mai sus menţionat (Steel AISI 1020) pentru toate componentele:
1. În structura arborescentă COSMOSWorks Manager se dă click-dreapta pe folder-ul Solids şi se selectează opţiunea Aplică materialul tuturor componentelor (Apply Material to All).
Se deschide fereastra de dialog Material.

Popa Ion Florin
248
2. Sub Selectaţi sursa materialului (Select material source) se procedează astfel:
a. Se dă click pe From library files şi se selectează fişierul coswkmat.
b. Se selectează oţelul AISI 1020. 3. Se dă click pe OK.
COSMOSWorks alege tipul de oţel AISI 1020 pentru toate componentele
ansamblului. Apare un semn de verificare pe fiecare icon din folder-ul Solids.
4.3.3. Aplicarea restricţiilor
Se fixează feţele prezentate în figura de mai jos.
Pentru a restricţiona modelul:
1. Se dă click pe icon-ul Restraints din bara de instrumente COSMOSWorks Main.
Apare Restraint PropertyManager. 4. Se stabileşte tipul (Type) pentru soluţia fixare (Fixed). 5. În zona grafică se dă click pe cele două feţe din figură. Face<1> şi Face<2> apar în caseta de selecţie Faces, Edges, Vertices for
Restraint .

Modelarea şi simularea sistemelor robotice
249
4. Se dă click pe OK.
4.3.4. Împărţirea în elemente finite şi efectuarea studiului
Pentru a împărţii modelul în elemente finite şi pentru a efectua studiul:
1. Se dă click pe icon-ul Mesh de pe bara de instrumente COSMOSWorks Main.
Apare Mesh PropertyManager.
2. Se dă click pe Options. Apare caseta de dialog Options cu selecţia Mesh activă.

Popa Ion Florin
250
3. Se selectează: High, Standard, 4 Points, şi Smooth surface şi se dă click pe OK.
4. Se verifică Run analysis after meshing. 5. Se dă click pe OK pentru a accepta valorile implicite la parametrilor
Global Size şi Tolerance . Când analiza este completă se dă click pe OK.
4.3.5. Listarea frecvenţelor de rezonanţă
Pentru a lista frecvenţele de rezonanţă:
1. Se dă click pe icon-ul Modes din bara de instrumente COSMOSWorks List Results.

Modelarea şi simularea sistemelor robotice
251
Caseta de dialog List Modes listează numărul modului, frecvenţa de rezonanţă (rad/sec şi Hz) şi perioada corespunzătoare în secunde.
2. Pentru a salva rezultatele listate într-un fişier Excel, se dă click pe Save. Apare fereastra de dialog Save As 3. Se dă un nume pentru fişierul rezultatelor, se selectează un folder şi se dă click pe Save.
Aces fişier al rezultatelor este salvat ca un fişier Excel (*.csv). Se poate vizualiza acest fişier dacă este instalat Microsoft Excel pe calculator.
4. Se dă click pe Close.
4.3.6. Listarea maselor participante
Pentru a lista masele participante:
1. În structura arborescentă COSMOSWorks Manager se dă click-dreapta pe folder-ul Deformation şi se selectează List Mass Participation.
Apare caseta de dialog Mass Participation
Caseta de dialog Mass Participation listează numărul modurilor de deformaţie, frecvenţele (în Rad/sec sau Hz) şi masele participante pe direcţiile X, Y şi Z.
2. Pentru a salva rezultatele listate într-un fişier Excel, se dă click pe Save. Apare fereastra de dialog Save As 3. Se dă un nume pentru fişierul rezultatelor, se selectează un folder şi se dă click pe Save. 4. Se dă click pe Close.

Popa Ion Florin
252
4.3.7. Verificarea preciziei rezultatelor
Pentru a verifica acurateţea rezultatelor anterioare se redivide modelul folosind o dimensiune globală mai mică a elementului şi se reefectuează studiul.
Pentru a reîmpărţi modelul şi a reefectua studiul:
1. Se dă click pe icon-ul Mesh din bara de instrumente COSMOSWorks Main.
Apare un mesaj de avertizare care informează că reîmpărţirea şterge rezultatele existente.
2. Se dă click pe OK. Apare Mesh PropertyManager. 3. Se trage cursorul în poziţia cea mai din dreapta. 4. Se verifică Run analysis after meshing. 5. Se dă click pe OK . Când analiza este completă se dă click pe ferestra de mesaj.
4.3.8. Listarea noilor frecvenţe de rezonanţă
Pentru listarea noilor frecvenţe de rezonanţă:
1. Se dă click pe icon-ul Modes din bara de instrumente COSMOSWorks List Results.
Apare caseta de listare List Modes. 2. Se dă click pe Close.
Compararea cu rezultatele anterioare arată o schimbare maximă de aproximativ 0,7% indicându-se faptul că rezultatele anterioare sunt destul de precise.

Modelarea şi simularea sistemelor robotice
253
Rezultatele curente sunt mai precise deoarece o dimensiune mai mica a elementului este utilizată pentru împărţire.
4.3.9. Vizualizarea modurilor de deformare
Pentru a se vedea principalul mod de deformare:
1. În structura arborescentă COSMOSWorks Manager se dă click-dreapta pe folder-ul Load/Restraint şi se selectează opţiunea Hide All pentru a ascunde toate simbolurile de restricţie. 2. În structura arborescentă COSMOSWorks Manager se dă click pe semnul plus din faţa folder-ului Deformation. Apare icon-ul Plot1. 3. Se dă dublu-click pe Plot1.
Modul de deformare principal este prezentat mai jos (mode number 1).

Popa Ion Florin
254
Pentru a afişa modelul original nedeformat pe modul de deformare principal:
1. În structura arborescentă COSMOSWorks Manager se dă click-dreapta pe Plot1 din folder-ul Deformation şi se selectează opţiunea Settings.
Apare Settings PropertyManager. 2. In caseta de dialog Deformed Plot Options se verifică Superimpose the original model on the deformed shape.
3. Pentru a schimba culoarea modelului nedeformat se dă clik pe caseta de culori, se selectează culoarea dorită din paleta de culori şi se dă click pe OK. 4. Pentru a controla transparenţa modelului nedeformat se trage cursorul către stânga pentru o transparenţă mai scăzută, sau cştre dreapta pentru mai multă transparenţă.

Modelarea şi simularea sistemelor robotice
255
5. Se dă click pe OK . Modelul nedeformat este afişat pe modul de deformare principal.
Pentru a vizualiza alte moduri de deformare:
1. În structura arborescentă COSMOSWorks Manager se dă click-dreapta pe folder-ul Deformation şi se selectează Define. Apare Deformed Shape Plot Property Manager.
2. În caseta de dialog Display, se setează 2 pentru Mode shape şi se dă click pe OK .
Icon-ul Plot2 apare în folder-ul Deformation şi modul de deformare 2 este afişat.

Popa Ion Florin
256
4.4. SCENARII DE PROIECTARE
Scenariile de proiectare dintr-un studiu permit analiza rapidă a proiectărilor multiple. Se folosesc scenarii de proiectare pentru a calcula frecvenţele de rezonanţă a mai multor proiectări a unei roţi simultan. Proiectările se bazează pe schimbarea numărului de spiţe.
În acest capitol se va prezenta: • Definirea parametrizarii unei dimensiuni • Definirea scenariilor de proiectare bazate pe schimbările geometrice • Rularea aplicaţiei pentru fiecare scenariu de proiectare • Evaluarea rezultatelor obţinute pentru fiecare scenariu de proiectare
4.4.1. Definirea unui studiu de frecvenţă Pentru a defini studiul de frecvenţă:
1. Se dă click pe icon-ul COSMOSWorks Manager . 2. Se crează un studiu de frecvenţă selectând Solid mesh pentru tipul de
divizare. 3. Se alege materialul oţel aliat (Alloy Steel) pentru piesă, din biblioteca de
materiale COSMOS material library (coswkmat). 4. Se aplică o restricţie de fixare - Fixed – pe gaura din centrul roţii.

Modelarea şi simularea sistemelor robotice
257
4.4.2. Definirea unghiului ca şi parametru (parametrizarea unghiului)
Un unghi este utilizat ca dimensiune conducătoare pentru a determina numărul de multiplicări dintr-un model circular CirPattern1.
Pentru parametrizarea unghiului:
1. Se dă click pe icon-ul Parameters de pe bara de instrumente COSMOSWorks Design Scenario.
Apare ferestra de dialog Parameters.
2. Se dă click pe Add.
Apare ferestra de dialog Add Parameters.

Popa Ion Florin
258
3. În ferestra de dialog Add Parameters se editează Angle în căsuţa Name. 4. Se stabileşte pentru Filter opţiunea Model dimensions. 5. Se dă click pe FeatureManager design . 6. În structura arborescentă FeatureManager se dă dublu-click pe
CirPattern1. 7. În zona grafică, se dă click pe dimensiunea prezentată în figură.
D2@CirPattern1@Pulley. Piesa apare în căsuţa Model dimension.
8. Se dă click pe OK pentru a închide fereastra de dialog Add Parameters. Unghiul apare în în ferestra de listare Parameters.
9. Se dă click pe OK pentru a închide fereastra de listare Parameters.
Dacă este necesar, se dă click pe OK pentru a închide Dimension PropertyManager.

Modelarea şi simularea sistemelor robotice
259
4.4.3. Definirea scenariilor
Se definesc 5 scenarii bazate pe valori ale parametrului unghiului.
Pentru a defini scenariile de proiectare:
1. Se revine la structura arborescentă COSMOSWorks Manager.
2. Se dă click pe icon-ul Design Scenario de pe bara de instrumente COSMOSWorks Design Scenario.
Apare ferestra de dialog Design Scenario.

Popa Ion Florin
260
3. Pentru numărul de scenarii (No. of scenarios) se editează valoarea 5 şi apoi se dă click pe Update pentru preluarea acesteia. 4. În tabelul de mai jos, se verifică unghiul (Angle) şi se introduc valorile unghiului:
Parametrul Set1 Set2 Set3 Set4 Set5 Unghiul 180 120 90 72 60
5. Sub Run options, se alege opţiunea All scenarios. 6. Se verifică Stop and prompt with error messages when a scenario fails. 7. Se dă click pe OK.
Apare un semn de verificare în icon-ul Design Scenario.
4.4.4. Analiza scenariilor de proiectare
Nu este necesară împărţirea iniţială în elemente finite. Împărţirea în elemente finite se desfăşoară automat când se calculează rezultatele pentru fiecare scenariu de proiectare
Pentru a analiza scenariile de proiectare:
1. Se dă click pe icon-ul Run din bara de instrumente COSMOSWorks Design Scenario.
Programul porneşte pe rând evaluarea scenariilor de proiectare. Când analiza este completă este creat un folder Design Scenario Results în structura arborescentă COSMOSWorks Manager.
4.4.5. Listarea rezultatelor

Modelarea şi simularea sistemelor robotice
261
Rezultatele se pot lista într-o formă tabelară. 1. În structura arborescentă COSMOSWorks Manager se dă click-dreapta pe folder-ul Design Scenario Results şi se selectează Show Summary.
Apar rezultatele. Sunt listate 5 frecvenţe de rezonanţă în rad/sec pentru fiecare scenariu de proiectare.
2. Se stabilesc unităţile de măsură pentru mărimile rezultante (Result units) în SI.
Frecvenţele de rezonanţă sunt listate în rad/sec. 3. Pentru a salva lista de rezultate într-un fişier text se selectează Save. 4. Se dă click pe Close pentru a închide fereastra de dialog.
4.4.6. Reprezentarea grafică a rezultatelor scenariilor de proiectare
Se prezintă grafic primele 5 frecvenţe pentru toate scenariile de proiectare.
1. În structura arborescentă COSMOSWorks Manager se dă click pe semnul plus din faţa folder-ului Design Scenario Results.
Apare Graph1. 2. În structura arborescentă COSMOSWorks Manager se dă click-dreapta pe Graph1 şi se selectează Edit Definition.
Apare fereastra de dialog Graph.

Popa Ion Florin
262
3. Se dă click pe By Set. 4. Se stabilesc unităţile de măsură (Units) în Hz. 5. Se dă click pe icon-ul pentru a muta toţi itemii din fereastra de listare Available Results în fereastra de listare Graph Results 6. Se dă click pe OK. Apare graficul de mai jos.
7. Se închide fereastra Graph1.
1. În structura arborescentă COSMOSWorks Manager se dă click-dreapta pe folder-ul Design Scenario Results şi se selectează Define Graph.
Apare ferestra de dialog Graph. 2. Se dă click pe By Parameter şi se selectează Angle. 3. Se stabilesc unităţile de măsură (Units) în Hz. 4. Se dă click pe icon-ul pentru a muta toţi itemii din fereastra de listare Available Results în fereastra de listare Graph Results. 5. Se dă click pe OK.
Apare graficul de mai jos. 6. Se închide ferestra grafică.

Modelarea şi simularea sistemelor robotice
263
Graph2 apare în Design Scenario Results din structura arborescentă COSMOSWorks Manager.

Popa Ion Florin
264
4.4.7. Animarea modului de deformare pentru ultimul scenariu
Se pot prezenta grafic deformările ultimului scenariu de proiectare (Set5).
Pentru a prezenta grafic şi pentru a anima primul mod asociat cu Set5:
1. În structura arborescentă COSMOSWorks Manager se dă dublu-click pe icon-ul Plot1 din folder-ul Deformation.
Primul mod de deformare pentru Set5 apare grafic. 2. Se dă click-dreapta pe icon-ul Plot1 şi se selectează Animate.
Se deschide fereastra Animation PropertyManager.
3. Se dă click pe icon-ul Play .
Animaţia este pornită.
4. Se dă click pe icon-ul Stop . 5. Se dă click pe OK pentru a închide Animation PropertyManager.

Modelarea şi simularea sistemelor robotice
265
4.5. Analiza termică
Temperaturile înalte pot distruge componentele electronice. Acest studiu
analizează transferul de căldură într-un ansamblu de tip integrat. Într-o stare de regim staţionar fiecare particulă este în echilibru termic (căldura din interior este egală cu cea din exterior) indicându-se o temperatură constantă. Etapele de realizare unei a analize termice sunt:
• Crearea unui studiu termic în stare de regim staţionar • Alegerea manuală a proprietăţilor materialului • Definirea unei proprietăţi a materialului dependent de temperatură • Definirea încărcărilor termice şi a condiţiilor la limită • Vizualizarea rezultatelor temperaturii • Utilizarea instrumentului de proba (Probe Tool) • Generarea unui grafic izo al temperaturii • Crearea unui studiu termic tranzitoriu • Utilizarea opţiunii drag and drop pentru a defini proprietăţile materialului
şi încărcările termice • Definirea unei încărcări termice dependente de timp prin importarea unei
curbe de timp predefinite • Generarea unui grafic de răspuns
4.5.1. Descrierea modelului
Ansamblul este realizat dintr-un substrat rectangular – porţelan ceramic (Ceramic Porcelain) se dimensiuni 40X40X1 mm şi din 16 cipsuri rectangulare având dimensiuni de 6X6X0,5 mm.
Fiecare generează o putere calorică maximă de 0,2 W. Puterea calorică creşte de la valoarea zero la t = 0 şi atinge valoarea maximă (0,2 W) după aproximativ 60 secunde. Coeficientul de conductivitate termică al cipului variază cu temperatura
Căldura este disipată prin convecţie din substrat. Coeficientul de transfer de căldură prin convecţie (Film coefficient) este de 25 W/m2 K şi temperatura ambientului este de 300 K.
Datorită simetriei după două planuri se analizează doar un sfert de model. Modelul în întregime este prezentat mai jos.

Popa Ion Florin
266
4.5.2. Crearea unui studiu termic în regim staţionar
Pentru a crea un studiu termic:
1. Se dă click pe COSMOSWorks Manager .
2. Se dă click pe icon-ul Study din bara de instrumente COSMOSWorks Main.
Apare caseta de dialog Study. 3. Sub Study name, se editează numele studiului, de exemplu
SteadyState. 4. Sub Analysis type se selectează opţiunea Thermal. 5. Sub Mesh type se selectează opţiunea Solid mesh. 6. Se dă click pe OK.
COSMOSWorks crează studiul în structura arborescentă COSMOSWorks Manager.
Pentru a verifica tipul studiului termic:
1. În structura arborescentă COSMOSWorks Manager se dă click-dreapta pe icon-ul Study şi se selectează Properties.
Apare caseta de dialog Thermal. 2. Sub Solution type, se verifică dacă Steady state este selectat. 3. Se dă click pe OK.

Modelarea şi simularea sistemelor robotice
267
4.5.3. Alegerea materialului pentru substrat Substratul este fabricat din porţelan ceramic (Ceramic Porcelain). Materialul
substratului este ales din biblioteca de materiale COSMOS (coswkmat.lib).
Pentru a alege porţelanul ceramic din care este fabricat substratul:
1. În structura arborescentă COSMOSWorks Manager, se dă click-dreapta pe Substrate-1 şi se selectează Apply/Edit Material. Apare caseta de dialog Material.
2. Sub Select material source se procedează astfel: c. Se dă click pe From library files şi se selectează coswkmat din
meniu. d. Se dă click pe semnul plus din faţa opţiunii Other Non-metals şi
se selectează opţiunea Ceramic Porcelain. 3. Se dă click pe OK.
COSMOSWorks alege Ceramic Porcelain pentru substrat.
4.5.4. Alegerea materialului pentru cipuri Se introduc manual proprietăţile materialului din care este fabricat cipul.
Coeficientul de conductivitate ternică (K) al cipurilor este dependent de temperatură. Mai jos este prezentată o listă a proprietăţilor materialului din care este fabricat cipul:
Proprietăţi Valoare (SI) Modulul de elasticitate Elastic modulus (EX) 4.1e11 N/m2
Coeficientul Poisson Poisson's ratio (NUXY) 0.3
Conductivitatea termică Thermal conductivity (KX)
Dependentă de temperatură (tabelul de mai jos)
Coeficientul de expansiune termică Thermal expansion coefficient (ALPX) 1X10-6 K-1
Căldura specifică Specific heat (C) 670 J/(Kg.K)
Dependenţa de temperatură a conductivităţii termice a materialului din care este fabricat cipul este dată de următoarele perechi de date:

Popa Ion Florin
268
Temperatura (K) K (W/m.K) 100 390 150 260 200 195 250 156 300 130 350 110 400 98 450 87
Pentrua a alege proprietăţile materialului pentru cipuri:
1. În structura arborescentă COSMOSWorks Manager se selectează cele patru cipuri. Pentru a face asta, se ţine apăsată tasta Ctrl şi se dă click pe icon-urile cipurilor. Cele patru icon-uri ale cipurilor sunt selectate.
2. Se dă click pe Apply Material to Selected Components din bara de instrumente COSMOSWorks Main. Apare caseta de dialog Material.
3. Sub Select material source, se selectează opţiunea Custom defined. 4. Sub Material Properties, se procedează astfel:
a. Se verifică dacă Model Type este stabilit pentru Linear Elastic Isotropic.
b. Se stabilesc unităţile de măsură Units în SI. 5. Se editează un nume pentru material în caseta Name, de exemplu, Chip
Material. 6. În tabelul proprietăţile materialului se dă click în interiorul casetei Value
pentru fiecare proprietate a materialului prezentată în primul tabel de mai sus (cu excepţia lui KX) şi se editează valoarea ei.
Modulul de elasticitate (EX) şi coeficientul Poisson (NUXY) nu sunt necesare pentru analiza termică.
Pentru a alege o conductivitate termică dependentă de temperatură (KX), se va proceda astfel:
a. Sub coloana Temp Dependency pentru KX, se dă click în interiorul celulei de valori şi se selectează Temp dependent din meniu. Se deschide fereastra Tables & Curves.
b. Se verifică dacă Type este setat pe KX vs Temp. c. În caseta Table data, se stabilesc unităţile de măsură Units în Kelvin şi
respectiv W/(m.K). Se editează perechile de date conductivitate termică-temperatură aşa cum apar în cel de-al doilea tabel de mai sus. Pentru a introduce un nou rând de date se dă dublu-click pe oricare celulă de sub coloana Points.

Modelarea şi simularea sistemelor robotice
269
7. Se dă click pe OK.
COSMOSWorks alege proprietăţile materialului specificat pentru toate
componentele. Un semn de verificare apare pe fiecare icon component.
4.5.5. Încărcările termice şi şi condiţiilor la limită
Ansamblului i se aplică următoarele încărcări termice şi următoarele condiţii la limită:
• Puterea calorică pentru cele patru cipuri. • Condiţiile de convecţie la limită de pe partea din spate a substratului şi de
pe Face 1 şi Face 2 prezentate în figură (ansamblul este prezentat având o orientare izometrică)

Popa Ion Florin
270
4.5.6. Aplicarea puterii calorice pe cipuri
Pentru a aplica puterea calorică:
1. Se dă click pe icon-ul Heat Power din bara de instrumente COSMOSWorks Thermal Loads. Apare Heat Power PropertyManager.
2. În zona grafică, se dă click pentru a mări structura arborescentă FeatureManager design.
3. Se dă click pe icon-urile Chip<1>, Chip<2>, Chip<3> şi Chip<4> . Chip-1, Chip-2, Chip-3 şi Chip-4 apar în zona de selecţie Faces, Edges,
Vertices, Components din caseta Heat Power . 4. Sub Heat Power (Per Entity), se procedează astfel:
b. Se stabilesc unităţile de măsură Units în SI.
c. Se stabileşte Heat Power la 0.2. 5. Se dă click pe OK .
COSMOSWorks aplică puterea calorică celor 4 cipuri şi crează un icon în folder-ul Load/Restraint.

Modelarea şi simularea sistemelor robotice
271
4.5.7. Aplicarea convecţiei Se aplică convecţia pe faţa inferioară a substratului, Face 1 şi Face 2.
Pentru aplicarea convecţiei:
1. Se dă click pe icon-ul Convection din bara de instrumente COSMOSWorks Thermal Loads. Apare Convection PropertyManager.
2. În zona grafică se dă click pe faţa din spate a substratului Face 1 şi Face 2 aşa cum sunt prezentate în figură. Face<1>, Face<2> şi Face<3> apar în caseta de selecţie Faces for
Convection .
3. Se stabilesc unităţile de măsură Units în SI.
4. Se stabileşte coeficientul de convecţie, Convection Coefficient la 25.
5. Se stabileşte Bulk Temperature la 300. 6. Se dă click pe OK .

Popa Ion Florin
272
COSMOSWorks aplică convecţia celor 3 feţe selectate şi crează un icon în folder-ul Load/Restraint. Simbolurile de convecţie apar deasemenea pe cele 3 feţe selectate.
4.5.7. Împărţirea modelului în elemente finite şi efectuarea studiului
Pentru a împărţi modelul şi pentru a efectua studiul:
1. Se dă click pe icon-ul Mesh din bara de instrumente COSMOSWorks Main. Apare Mesh PropertyManager.
2. Se dă click pe Options. Caseta de dialog Options apare cu opţiunea Mesh activă.
3. Se selectează următoarele opţiuni: High, Standard, 4 Points şi Smooth surface şi se dă click pe OK.
4. Se verifică Run analysis After meshing. 5. Se dă click pe OK pentru a accepta implicit setările pentru Global Size
şi Tolerance . Când analiza este completă, se dă click OK pe fereastra de mesaj.
4.5.8. Vizualizarea rezultatelor analizei termice
Pentru a vizualiza distribuţia temperaturii:
1. În structura arborescentă COSMOSWorks Manager, se dă clik pe semnul plus din faţa folder-ului Thermal.

Modelarea şi simularea sistemelor robotice
273
Apare Plot1. 2. Se dă dublu-click pe Plot1.
Graficul de temperatură este afişat. Aşa cum era de aşteptat, datorită convecţiei, cipul din colţ este cel mai rece iar
cipul din interior este cel mai fierbinte.
4.5.9. Utilizarea uneltei de probă
Se utilizează icon-ul Probe tool din bara de instrumente COSMOSWorks Results, pentru a lista temperata în diferite locaţii de pe model
Pentru a lista temperatura din locaţiile selectate:
1. Dacă este necesar se activează Plot1 dând dublu-click pe icon-ul său.
2. Se dă click pe icon-ul Probe din bara de instrumente COSMOSWorks Result Tools.
Apare caseta de listare Probe . 3. Se selectează vârfurile prezentate în figura de mai jos începând din colţul
din dreapta jos (locaţia 1).
Caseta de listare Probe listează temperaturile şi coordonatele X, Y şi Z ale vârfurilor selectate în sistemul global de coordonate.
4. Se dă click pe Plot.

Popa Ion Florin
274
Apare ferestra Probe Result cu un grafic ce prezintă pe o axă temperaturile în vârfurile selectate, iar pe alta – numărul nodurilor de la vîrfuri.
5. În ferestra Probe Result se dă click pe File, Close. 6. Se dă click pe Close din caseta de dialog Probe.
4.5.10. Generarea unui izografic al temperaturii
Utilizarea izograficelor permite determinarea regiunilor de temperatură maximă de pe un model.
Pentru a genera un izografic al temperaturii
1. Se dă dublu-click pe Plot1 din folder-ul Thermal pentru a afişa graficul temperaturii în zona grafică.
2. Se dă din nou click-dreapta pe icon-ul Plot1 şi se selectează Iso Clipping. Apare Iso Clipping PropertyManager. 3. Pentru a localiza regiunile cu temperatură maximă, în cutia de dialog Iso 1
se trage cursorul Isovalue către capătul din dreapta al scalei. 4. În caseta Options se verifică Plot on iso surface only. 5. Se dă click pe OK .
Este afişată suprafaţa izo a temperaturii specificate.

Modelarea şi simularea sistemelor robotice
275
4.5.11. Verificarea echilibrului termic
Se poate lista energia calorică care se degajă din model utilizând instrumentul
List Selected . În regim staţionar, energia calorică ce intră în sistem trebuie să fie egală cu aceea care iese din el. Puterea calorică totală generată de cipuri este de 0,8 W. Energia calorică iese din sistem prin feţele cu convecţie.
Pentru a prezenta grafic fluxul de energie rezultant:
1. Se dă click pe icon-ul Thermal de pe bara de instrumente COSMOSWorks Result Tools. Apare Thermal Plot PropertyManager.
2. În caseta de dialog Display se procedează astfel:
e. Se setează Component la HFLUXN: Resultant heat flux.
f. Se stabilesc unităţile de măsură Units în W/m2. 3. Se dă click pe OK .
Graficul fluxului caloric rezultant este afişat şi este creat un nou icon (Plot2) în folder-ul Thermal din structura arborescentă COSMOSWorks Manager .
Pentru a lista energia calorică ce iese din sistem prin convecţie se procedează astfel:
1. Se dă click pe icon-ul List Selected din bara de instrumente COSMOSWorks Result Tools.

Popa Ion Florin
276
Apare caseta de dialog List Selected. 2. Se selectează 3 feţe pe care a fost specificată convecţia. Se utilizează cheia
Ctrl în timp ce se selectează feţele. 3. Se dă click pe Update din caseta de dialog List Selected.
Fluxul caloric total (Total Heat Flow) este listat ca fiind de -0.75874 W. Acest rezultat prezintă o eroare de aproximativ 5% faţă de rezultatul exact -0.8 W. Rezultatul negativ arată faptul că este vorba de energia calorică ce iese din sistem.
4. Se dă click pe Close.
4.5.12. Crearea unui studiu termic tranzitoriu
În cazul de faţă se ia în consideraţie timpul pentru rezolvarea aceleiaşi probleme.
Pentru realizarea unui studiu termic tranzitoriu:
1. Se dă click pe icon-ul Study de pe bara de instrumente COSMOSWorks Main. Apare caseta de dialog Study.

Modelarea şi simularea sistemelor robotice
277
2. Sub Study name se editează un nume pentru studiu, de exemplu Transient.
3. Sub Analysis type se selectează opţiunea Thermal. 4. Sub Mesh type se selectează opţiunea Solid mesh. 5. Se dă click pe OK.
COSMOSWorks crează noul studiu în structura arborescentă COSMOSWorks Manager.
Pentru a defini proprietăţile studiului tranzitoriu:
1. În structura arborescentă COSMOSWorks Manager se dă click-dreapta pe icon-ul Transient şi se selectează Properties. Apare caseta de dialog Thermal.
2. Sub Solution type se procedează astfel: a. Se dă click pe Transient. b. Se stabileşte timpul total, Total time la 900 s. c. Se stabileşte timpul de incrementare, Time increment la 30 s.
3. Se dă click pe OK.
4.5.13. Utilizarea opţiunii Drag and Drop pentru a alege materialele
Se utilizează opţiunea drag and drop pentru a copia materialele din studiul SteadyState în studiul Transient.

Popa Ion Florin
278
Pentru a alege materialele utilizând opţiunea drag and drop:
1. Se dă click pe semnul plus de lângă icon-ul SteadyState pentru a extinde conţinuturile
2. Se trage cu mouse-ul de folder-ul Solids din SteadyState şi se mută în icon-ul Transient.
COSMOSWorks copiază toate materialele din SteadyState în Transient.
4.5.14. Alegerea temperaturii iniţiale pentru componentele ansamblului
Se alege o temperatură iniţială de 300 K pentru toate componentele ansamblului.
Pentru a alege temperatura iniţială:
1. În structura arborescentă COSMOSWorks Manager se dă click-dreapta pe icon-ul Load/Restraint şi se selectează Temperature. Apare Temperature PropertyManager.
2. Sub Type se selectează opţiunea Initial temperature. 3. Se dă click pe toate componentele ansamblului care apar în structura
arborescentă FeatureManager design.
Componentele selectate apar în caseta Faces, Edges, Vertices, Components for
Temperature .
4. Sub Temperature se selectează K (Kelvin) şi apoi se editează 300 în caseta de valori.
5. Se dă click pe OK .
Programul alege temperatura specificată şi crează un icon în folder-ul Load/Restraint.
4.5.15. Utilizarea opţiunilor Copy şi Paste pentru aplicarea încărcărilor termice
Se utilizează opţiunile copy şi paste pentru a copia încărcările termice şi condiţiile la limită din SteadyState în Transient, după cum urmează:
1. În structura arborescentă COSMOSWorks Manager se dă click-dreapta pe Load/Restraint din studiul SteadyState şi click pe Copy.
2. Se dă click-dreapta pe Load/Restraint din studiul Transient şi click pe Paste.
COSMOSWorks copiază încărcările termice şi condiţiile la limită din studiul SteadyState în studiul Transient.

Modelarea şi simularea sistemelor robotice
279
4.5.16. Definirea condiţiei puterii calorice dependente de timp
Puterea calorică porneşte de la o valoare zero la t = 0 şi atinge o valoare maximă de 0,2 W după aproximativ 60 s. Variaţia în timp a puterii calorice este definită într-un fişier al curbei de date (HeatPower_time_curve.cwcur) aflat în <install_dir>\ Examples\ Thermal.
Pentru a include aceasta dependenţă de timp se editează definiţia condiţiei puterii calorice.
Pentru a edita condiţia puterii calorice
1. În structura arborescentă COSMOSWorks Manager se dă click-dreapta pe icon-ul Heat Power-1 din folder-ul Load/Restraint şi se selectează Edit Definition. Apare Heat Power PropertyManager.
2. În caseta Heat Power (Per Entity) se procedează astfel:
g. Se dă click pe Use Time Curve , apoi se dă click pe Edit. Se deschide caseta de dialog Time Curve.
b. Se dă click pe Get Curve.

Popa Ion Florin
280
Se deschide caseta de dialog Open. c. Se selectează fişierul <install_dir>\ Examples\ Thermal\
HeatPower_time_curve.cwcur şi se dă click pe Open. Se deschide caseta de dialog Function Curves.
d. Se dă click pe Time Curve-1 sub Time Curve. Apar datele curbei în caseta Curve Data. Pentru a vizualiza curba de timp se dă click pe View. Se închide ferestra grafică.
e. Se dă click pe OK. Se va intoarce la caseta de dialog Time Curve.
f. Se dă click pe OK. Se va intoarce la Heat Power PropertyManager.
3. Se dă click pe OK pentru a completa definiţia condiţiei puterii calorice dependente de timp.
4.5.17. Efectuarea studiului tranzitoriu
Înainte de efectuarea studiului tranzitoriu este nevoie de efectuarea unei împărţiri în elemente finite.
Pentru împărţirea modelului în elemente finite şi efectuarea studiului tranzitoriu:
1. Se trage icon-ul Mesh din studiul SteadyState şi se mută în icon-ul Transient study.
Icon-ul Mesh din Transient study se schimbă din în indicând faptul că împărţirea este valabilă.
2. Se dă click pe Run de pe bara de instrumente COSMOSWorks Main. Când analiza este completă se dă click pe OK de pe fereastra de mesaj.
4.5.18.Vizualizarea temperaturilor pentru perioade de timp diferite
Analiza tranzitorie furnizează profile de temperatură pentru perioadele de timp cerute.
Pentru a vizualiza temperaturile la 30 s:
1. În structura arborescentă COSMOSWorks Manager se dă click pe semnul plus din faţa folder-ului Thermal din Transient study. Apare Plot1.
2. Se dă dublu-click pe Plot1. 3. Se dă click-dreapta pe icon-ul Plot1 şi se selectează Edit Definition.
Apare Thermal Plot PropertyManager. 4. În caseta de dialog Display se procedează astfel:
a. Se stabilesc unităţile de măsură, Units în Kelvin.

Modelarea şi simularea sistemelor robotice
281
b. Se setează Plot Step la 1. 5. Se dă click pe OK .
Este afişat profilul de temperatură la 30 s.
Pentru a vizualiza temperaturile la 900 s:
1. Se dă click pe Thermal de pe bara de instrumente COSMOSWorks Result Tools. Apare Thermal Plot PropertyManager.
2. În caseta de dialog Display se procedează astfel:
h. Se stabilesc unităţile de măsură, Units în Kelvin.
i. Se setează Plot Step la 30. 3. Se dă click pe OK .
Apare icon-ul Plot2 în folder-ul Thermal şi este afişat profilul de temperatură la 900 s.

Popa Ion Florin
282
4.5.19.Vizualizarea schimbărilor de temperatură în raport cu timpul
Se utilizează instrumentul Probe pentru a reprezenta grafic curba temperatură-timp (numit deasemenea graficul de răspuns), după cum urmează:
1. În structura arborescentă COSMOSWorks Manager se activează Plot2 din Transient study dându-se dublu-click pe icon-ul sau.
2. Se dă click pe Probe de pe bara de instrumente COSMOSWorks Result Tools.

Modelarea şi simularea sistemelor robotice
283
Apare caseta de listare Probe. 3. Se dă click pe vertex-ul prezentat în figură. 4. Se dă click pe Response.
Apare fereastra Response Grap. Graficul prezintă temperatura pe axa Y a vertexului selectat în raport cu timpul pe axa X.
Acest grafic arată că, condiţia de regim staţionar este atinsă în aproximativ 600 s (ce corespunde celui de-al 20-lea pas de timp).
5. Se închide fereastra grafică dând click pe File, Close. 6. Se dă click pe Close pentru a închide caseta de listare Probe.

Popa Ion Florin, Marin Cornel, Filip Viviana
284
Modelarea şi simularea dinamicii sistemelor reologice
5

Modelarea şi simularea sistemelor mecatronice
285
5.1. SISTEME REOLOGICE DE BAZĂ Sistemele reologice sunt utilizate în prezent în diverse domenii inginereşti, cum ar
fi izolarea antivibratilă a sistemelor mecanice. Utilizarea cauciucurilor naturale şi sintetice ca elemente de izolare antivibratilă şi amortizare a vibraţiilor este o soluţie consacrată în izolarea antivibratilă a echipamentelor, instalaţiilor, utilajelor.
Avantajele folosirii cauciucului sunt: proprietăţilor elastice, de fiabilitate şi mentenabilitate foarte bune; capacitatea de a absorbi o cantitate mare din energia vibraţiilor sub formă de
energie internă şi căldură în special în zona de rezonanţă, ceea ce îl recomandă în folosirea lor ca elemente amortizoare;
stabilitatea, rezilienţa şi factorul de amortizare mult mai bune în raport cu elementele elastice din oţel;
viteza transmiterea zgomotului prin elementele de cauciuc este mai mică de circa 100 de ori decât prin oţel ceea ce îl recomandă ca un bun izolator fonic;
modulul de elasticitate redus al cauciucului asigură izolarea sistemelor mecanice cu frecvenţe proprii mici, evitându-se astfel apariţia rezonanţei la frecvenţe joase. Dezavantajele folosirii cauciucului sunt:
• influenţa negativă a factorilor de mediu, în special a produselor petroliere, asupra proprietăţilor elastice şi de amortizare;
• scăderea proprietăţilor de elasticitate şi rezilienţă odată cu creşterea temperaturii, în special la funcţionarea în zona de rezonanţă;
• îmbătrânirea în timp, durata de funcţionare fiind limitată la 5-20 de ani, în funcţie de natura materialului şi condiţiile de exploatare. Comportarea cauciucurilor naturale sau sintetice este caracterizată de existenţa
unui timp de reacţie sau de întârziere între momentul aplicării forţei şi răspuns. Aceste elemente pot fi modelate cu ajutorul modelelor reologice care sunt constituite prin diferite combinaţii ale celor două modelele liniare elastice şi vâscoase: Hooke şi Newton. Aceste modele se utilizează pentru a studia comportarea sistemelor reologice reale. În funcţie de tipul de solicitare la care este supus modelul se studiază în continuare comportarea sistemelor pentru următoarele cazuri particulare:
fluajul materialului sau solicitare cu o forţă constantă de tip treaptă; descărcarea după fluaj relaxarea forţei sau solicitarea cu o sarcină ce variază astfel încât deformaţia
rămâne constantă; anularea deformaţiei după relaxare; solicitarea cu sarcină armonică; solicitarea cu impulsuri dreprtunghiulare; solicitarea cu semnal dreptunghiular alternant simetric.

Popa Ion Florin, Marin Cornel, Filip Viviana
286
5.2. FLUAJUL ŞI DESCĂRCAREA DUPĂ FLUAJ A SISTEMELOR REOLOGICE Mediul continuu vâscoelastic ideal prezintă atât proprietăţi elastice cât şi
proprietăţi vâscoase ce caracterizează şi comportarea unor materiale reale cum ar fi ca polimerii sintetici sau naturali, cauciucurile, etc. Aceste proprietăţi se pot pune în evidenţă prin experienţele de fluaj şi descărcarea după fluaj.
Fluajul este fenomenul de creştere lentă, progresivă a deformaţiilor mediului vâscoelastic atunci când asupra epruvetei se aplică o sarcină constantă care produce în material o tensiune de întindere σ0. Sub acţiunea acestei sarcini se produce în primul moment o deformaţie elastică instantanee ε1, după care se produce o deformaţie plastică ce tinde în timp spre o valoare limită E/00 σε = numită deformaţie întârziată (fig.5.1).
Descărcarea după fluaj este fenomenul care se produce după o experienţă de fluaj, când în material s-a produs deformaţia specifică ε2, când încetează acţiunea sarcinii exterioare. Fenomenul descărcării după fluaj constă într-o revenire elastică instantanee în primul moment urmată de o deformaţie plastică permanentă care tinde asimptotic spre o valoare ε3, numită deformaţie remanentă (fig.5.1).
σ0
t0
ε
t
Fig.5.1. Fenomenul de fluaj şi descărcare după fluaj
ε0 =σ0/E
σ
t
t1
t0 t1
ε3
ε2
ε1

Modelarea şi simularea sistemelor mecatronice
287
5.3. RELAXAREA FORŢEI ŞI ANULAREA DEFORMAŢIEI DUPĂ RELAXARE Fenomenul de relaxare a forţei constă în scăderea progresivă a sarcinii aplicate
epruvetei, respectiv a tensiunii de întindere σ , după ce aceasta a suferit o anumită deformaţie specifică ε2, în scopul păstrării constante a acestei deformaţii (fig.5.2).
Anularea deformaţiei după relaxare este fenomenul care se produce la schimbarea sensului sarcinii aplicate, respectiv a tensiunii din pozitive σ1 , care devine negativă de valoare -σ2. După inversarea sensului tensiunii în primul moment are loc o revenire elastică instantanee, după care, sub acţiunea sarcinii negative deformaţia scade progresiv trecând prin zero spre valori negative. În momentul în care deformaţia negativă este egală ca valoare cu deformaţia elastică instantanee corespunzătoare revenirii elastice, se anulează tensiunea negativă -σ2, elementul revenind la o deformaţie specifică nulă ( fig. 5.2).
Proprietăţile vâscoelastice de fluaj şi relaxare ale materialelor sunt influenţate în mod hotărâtor de temperatură. Pentru unele materiale, cum sunt polimerii, proprietăţile vâscoelastice se schimbă într-un mod discontinuu în jurul unei temperaturi θg numită temperatură de tranziţie, când au loc transformări fizico-chimice în material. Pentru anumite valori ale sarcinilor exterioare şi temperaturi mai mari decât θg materialele au proprietăţi preponderent vâscoase sau vâscoelastice, iar pentru temperaturi mai mici decât θg au proprietăţi elastice sau elastovâscoase.
-σ2
O
ε
t
σ10
σ
t
t1
ε2
O
σ1
Fig.5.2. Fenomenul de relaxare şi anularea deformaţiei după relaxare
t2

Popa Ion Florin, Marin Cornel, Filip Viviana
288
5.4. MODELUL LINIAR ELASTIC HOOKE Legea de comportare a unui mediu liniar elastic corespunzătoare modelului Hooke
arată că în cazul unei experienţe de fluaj sau o încărcare cu un semnal de tip treaptă având tensiunea σ0 se produce instantaneu o deformaţie specifică ε0 conform relaţiei:
E/00 σε = (5.1) în care E este modulul de elasticitate longitudinal.
La anularea sarcinii exterioare are loc o revenire elastică instantanee cu aceeaşi valoare a deformaţiei ε=σ0/E (fig.5.3). Modelul liniar elastic Hooke răspunde imediat la semnalul aplicat printr-o valoare a deformaţiei proporţională cu aceasta.
În cazul încărcării cu un semnal de tip treaptă negativ -σ0 se produce o deformaţie elastică instantanee negativă: ε=-σ0/E
În cazul încărcării cu un semnal armonic , răspunsul este o deformaţie armonică proporţională cu semnalul , de aceeaşi pulsaţie şi în fază cu acesta. Modelul Hooke nu produce defazaj între încărcare şi răspuns.
σ0
t0
σ
t
ε=σ0/E
t0
ε
t
Fig.5.3. Comportarea modelului Hooke la o încărcare de tip treaptă şi descărcare
t1
t1

Modelarea şi simularea sistemelor mecatronice
289
5.5. MODELUL LINIAR VÂSCOS NEWTON Modelul liniar vâscos Newton supus unei experienţe de fluaj arată o lege liniară
de comportare la un semnal de tip treaptă, datorită proporţionalităţii între viteza de variaţie a deformaţiei specifice ε& şi tensiunea corespunzătoare :
σλ
ε 1=& (5.2)
în care λ este coeficientul de vâscozitate al modelului Newton. Într-adevăr, prin integrarea ecuaţiei diferenţiale (5.2) se obţine relaţia liniară
reprezentată în figura 5.4:
ttdttCtt
λσ
εσλ
ε 0
0
)()(1)( =⇒+= ∫ (5.3)
La anularea sarcinii exterioare nu mai au loc nici un fel de deformaţii, deformaţia ε1=σ0/E păstrându-şi valoarea (fig.5.3). Modelul liniar vâscos Newton nu răspunde imediat la semnalul aplicat, ci treptat după o lege liniară. În cazul încărcării cu un semnal de tip treaptă negativ -σ0 se produc deformaţii plastice în sens negativ, conform relaţiei (5.3) : λσεε /)( 01 tt −= . În cazul încărcării cu un semnal armonic , răspunsul este o deformaţie armonică proporţională cu semnalul, de aceeaşi pulsaţie dar defazat cu π/2. Într-adevăr, dacă se aplică o sarcină armonică tsinωσσ 0= , conform relaţiei (5.3) se obţine următorul răspuns:
σ0
σ
t
tgα=σ0/λ
t0
ε
t
ε1
Fig.5.4. Comportarea modelului liniar vâscos Newton la un semnal de tip treaptă şi la descărcare
t1 t0

Popa Ion Florin, Marin Cornel, Filip Viviana
290
⎟⎠⎞
⎜⎝⎛ −+=⇔
−=+= ∫
2sin)(
cossin1)(
00
00
00
πωλωσ
εε
ωλωσ
εωλ
εε
tt
ttdttt
(5.4)
Pentru studiul comportării materialelor de tip vâscoelastic se folosesc diferite modele reologice având la bază modele liniare prezentate, a căror legi de comportare sunt caracterizate de ecuaţii diferenţiale ordinare cu coeficienţi constanţi care se pot scrie sub formă generală astfel:
...aaa...bbb +++=+++ σσσεεε &&&&&& 210210 (5.5) Simularea dinamicii sistemelor reologice se face în continuare pentru următoarele
cinci modele: • Voigt-Kelvin • Maxwell • Zener • Voigt-Kelvin-Hooke • Burgers
5.6. MODELUL VÂSCOELASTIC VOIGT-KELVIN Modelul vâscoelastic Voigt-Kelvin este un model folosit frecvent în modelarea şi simularea dinamicii sistemelor reologice, fiind format dintr-un element liniar elastic Hooke şi un element liniar vâscos Newton legate în paralel ca în figura 5.5.
Pentru a deduce ecuaţia diferenţială a modelui vâscoelastic Voigt-Kelvin se
observă că deformaţia celor două elemente este aceeaşi, iar tensiunea σ este egală cu suma tensiunilor corespunzătoare celor două elemente:
σσσεεε =+== ckck ; (5.6)
în care: λσεσε c
ck
k ;E
== & conform relaţiilor (5.1) şi (5.2).
Înlocuind relaţiile (5.1) şi (5.2) în (5.6) se obţine ecuaţia diferenţială a modelului Voigt-Kelvin:
λ
E
Fig. 5.5. Modelul vâscoelastic Voigt Kelvin
σ
ε

Modelarea şi simularea sistemelor mecatronice
291
ελεσ &+= E ⇔ ( )tEσ
τε
τε 11
=+& (5.7)
unde s-a notat cu E/λτ = timpul de întârziere al modelului Voigt- Kelvin. Ecuaţia diferenţială (5.7) are soluţia generală de forma:
( )( ) ( )
( )tdttt
EC
tρ
ρστε∫+
=
1
(5.8)
în care: ( ) τ
τρ
t
edtexpt =⎟⎠⎞
⎜⎝⎛= ∫
1 (5.9)
C este o constantă care se determină din condiţiile iniţiale. Înlocuind expresia (5.9) în soluţia (5.8) rezultă soluţia generală a modelului
Voigt- Kelvin , valabilă pentru orice tip de sarcină aplicată σ(t:
( ) ( ) ττστ
εtt s
edsesE
Ct−
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅+= ∫
0
1 (5.10)
În continuare este simulată dinamica modelului Voigt-Kelvin pentru diferite cazuri de încărcare prezentate la paragraful 5.1.
5.6.1 Simularea fluajului şi a descărcării după fluaj În cazul particular al aplicării unei sarcini de tip treaptă ( ) 0σσ =t cu t0=0
(fig.5.1) soluţia (5.10) devine:
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛−−+⎟
⎠⎞
⎜⎝⎛−=
τσ
τεε texp
Etexpt 10
0 (5.11)
Pentru următoarele valori particulare ale parametrilor ε0=0, 100 .Eσ
= , τ =1
soluţia (5.11) are forma din figura 5.6. La sfârşitul fazei după t1 = 4s se obţine deformaţia remanentă: ( ) 0980110 4
1 ,e. =−= −ε (5.12)
În cazul descărcării după fluaj, în ecuaţia diferenţială (5.7) se consideră ( ) 0=tσ obţinându-se:
01=+ ε
τε& (5.13)
Ecuaţia diferenţială (5.13) are soluţia de forma:
( ) ⎟⎠⎞
⎜⎝⎛−=
τεε texpt 1 (5.14)
în care ε1 reprezintă deformaţia iniţială care este aceeaşi cu deformaţia la momentul t=t1 de la faza precedentă.

Popa Ion Florin, Marin Cornel, Filip Viviana
292
Pentru valoarile particulare: 09801 .=ε şi τ=1 se obţine variaţia exponenţială din figura 5.7.
La sfârşitul fazei de încărcare după t2=4s se obţine deformaţia remanentă: 001800980 4
2 ,e. =⋅= −ε (5.15)
În figurile 5.8.a,b se prezintă schema bloc şi rezultatele obţinute folosind programul SIMULINK .
f1 t( ) 0.1 1 exp t−( )−( ):= f1 4( ) 0.098=
0 1 2 3 40
0.02
0.04
0.06
0.08
0.1
f1 t( )
tFig. 5.6. Simularea comportării la fluaj
f1 t( ) 0.098 exp t−( )⋅:= f1 4( ) 1.795 10 3−×=
0 1 2 3 40
0.02
0.04
0.06
0.08
0.1
f1 t( )
t
Fig. 5.7. Simularea comportării la descărcarea după fluaj

Modelarea şi simularea sistemelor mecatronice
293
Fig. 5.8.a. Schema bloc SIMULINK pentru fluaj şi descărcarea după fluaj
Fig. 5.8.b. Răspunsul modelului la fluaj şi descărcarea după fluaj
5.6.2. Simularea comportării la relaxare şi la anularea deformaţiei
după relaxare Se consideră o încărcare la fluaj cu o sacină σ0 , astfel încât după un timp t1 s-a
produs material o deformaţie ε1 mai mică decât valoarea de echilibru corespunzătoare pentru elementul Hooke: E/00 σε = (fig. 5.8).
Pentru o experienţă de relaxare în care se păstrează constantă această deformaţie ε1, tensiunea trebuie să scadă la valoarea de echilibriu corespunzătoare deformaţiei ε1:

Popa Ion Florin, Marin Cornel, Filip Viviana
294
011 σεσ <= E , după care aceasta rămâne constantă (fig. 5.9). Într-adevăr ecuaţia diferenţială (5.7) se scrie pentru acest caz astfel:
)t(Eσ
τε
τ11
1 = (5.16)
Din relaţia (5.16) rezultă: ttanconsE == 11 εσ . Pentru anularea deformaţiei după o relaxare, se aplică la momentul t2 o tensiune
negativă -σ2 astfel încât la momentul t3 se obţine o deformaţie nulă (fig.5.9). Din acest moment se anulează tensiunea negativă -σ2, ultima deformaţie obţinută păstrându-se nulă.
Într-adevăr, conform ecuaţiei diferenţiale (5.7) avem în acest caz:
001=⇒= σσ
τ)t(
E (5.17)
Pentru intervalul ( t2 , t3 ) când asupra elementului acţionează o tensiune negativă -
σ2, soluţia generală (5.10) se scrie:
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛ −−−−⎟
⎠⎞
⎜⎝⎛ −−=
τσ
τεε 222
1 1 ttexpE
ttexpt (5.18)
σ
t t1 O
σ0
Fig. 5.9. Simularea comportării la relaxare şi anularea deformaţiei după relaxare
-σ2
σ1
t2
O
ε
t
t2
ε1
t1 t3
t3
Fluaj Relaxare Anularea deformaţiei
-ε2

Modelarea şi simularea sistemelor mecatronice
295
Anulând expresia (5.18) a deformaţiei se obţine momentul t3:
⎟⎟⎠
⎞⎜⎜⎝
⎛++=
2
123 11
σε
τElntt (5.19)
În figurile 5.10.a,b se prezintă schema bloc şi rezultatele obţinute folosind programul SIMULINK .
Fig. 5.10.a. Schema bloc SIMULUNK pentru simularea
descărcării după relaxare
Fig 5.10.b. Răspunsul modelului la simularea descărcării după relaxare

Popa Ion Florin, Marin Cornel, Filip Viviana
296
5.6.3. Simularea comportării la încărcarea cu o sarcină armonică În cazul unei încărcări cu o sarcină armonică de forma ( ) tsint ωσσ 0= soluţia
generală (5.10) se scrie:
( ) ττ ωτσεε
tt t
edttsineE
t−
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛+= ∫
0
00 (5.20)
Efectuând integrala din relaţia (5.20) se obţine soluţia sub forma:
( )( )2
00 1 τω
ωτωωσεε τ
+⋅−
+=− tcostsin
Eet
t
(5.21)
Pentru următoarele valori particulare ale parametrilor ε0=2 10 =σ , 100 =E/σ ω=10 şi τ =1 soluţia (5.21) şi sarcina armonică aplicată sunt reprezentate în figura 5.11. Se observă că în regim staţionar, când primul termen se anulează, există un defazaj ϕ0 constant între sarcina aplicată şi răspuns ce depinde de pulsaţia sarcinii armonice şi de timpul de întârziere al elementului vâscos Newton:
( ) ( ) ( )
( )
τωθ
θωωτ
σε
ωτωωωτ
σε
=⇒
−+
=
⋅−+
=
0
0220
220
1
1
tg
)tsin(E
t
tcostsinE
t
(5.22)
Pentru valorile numerice de mai sus rezultă următorul defazaj: ),(rad,)(arctg 0
0 2894844711== τωϕ (5.23)
f1 t( ) sin 10t( ):=
f2 t( ) 2exp t−( )10
1 100+sin 10t( ) 10cos 10t( )−( )+:=
0 1 2 3 41
0.5
0
0.5
1
1.5
2
2.5
f1 t( )
f2 t( )
tFig. 5.11. Simularea încărcării armonice

Modelarea şi simularea sistemelor mecatronice
297
În figurile 5.12.a,b se prezintă schema bloc şi rezultatele obţinute folosind
programul SIMULINK.
Fig. 5.12.a. Schema bloc SIMULUNK pentru simularea
încărcării cu o sarcină armonică
Fig. 5.12.b. Răspunsul modelului la simularea
încărcării cu o sarcină armonică

Popa Ion Florin, Marin Cornel, Filip Viviana
298
5.6.4. Simularea comportării la încărcarea cu impulsuri dreptunghiulare În cazul unei încărcări cu impulsuri dreptunghiulare de amplitudine şi perioadă
constantă, având forma din figura 5.13, ţinând seama de expresia soluţiei generale (5.11) şi considerând ε0=0 la momentul iniţial, la sfârşitul primei faze de încărcare (Δti) se obţine deformaţia:
( )ieE
texpE
i μστ
σε −−=⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛ Δ−−= 11 00
1 (5.24)
în care s-a notat: τ
μ ii
tΔ= .
Notând xe i =μ− relaţia (5.24) devine: (5.25)
( )xE
−= 101
σε (5.26)
Ţinând seama de relaţia (5.14) la sfârşitul primei faze de descărcare (Δtd) se obţine
deformaţia: detexp d μετ
εε −=⎟⎠⎞
⎜⎝⎛ Δ−= 112 (5.27)
în care s-a notat: τ
μ dd
tΔ= . (5.28)
Notând ye d =μ− relaţia (5.27) devine:
( )yxE
−= 102
σε (5.29)
Repetând raţionamentul, la sfârşitul celei de a doua încărcări se obţine:
( )( )xyxE
+−= 1103
σε (5.30)
respectiv la sfârşitul celei de a doua descărcări se obţine:
( )( )yxyxE
+−= 1104
σε (5.31)
σ0
Δti Δtd Δti Δtd
Fig. 5. 13. Încărcarea cu impulsuri dreptunghiulare
σ
t
Δti

Modelarea şi simularea sistemelor mecatronice
299
După 2n cicluri de încărcare şi descărcare obţine:
( )( )
( )( )yyx...yxxyxE
yx...yxxyxE
nnn
nnn
112202
1122012
11
11
−−
−−−
++++−=
++++−=
σε
σε (5.32)
Termenii din paranteză sumele unor progresii geometrice cu raţia xy <1: Trecând la limită în expresiile de mai sus şi ţinând seama că 0=
→∞
nn
nyxlim se obţin
valorile maxime, minime şi amplitudinea deformaţiilor:
xyx
Emax −−
=110σε ;
( )xy
yxEmin −
−=
110σε ;
( )( )xy
yxEminmax −
−−=−=Δ
1110σεεε (5.33)
Fig.5.14.a Variaţia lui εmax, εmin şi Δε pentru diferite valori ale amortizării şi α=0.25
0 2 4 6 8 100
0.25
0.5
0.75
1
1 exp 0.25− x⋅( )−
1 exp x−( )−
exp 0.75− x( ) exp x−( )−
1 exp x−( )−( )
1 exp 0.25− x( )− exp 0.75− x⋅( )− exp x−( )+
1 exp x−( )−( )
x
0 2 4 6 8 100
0.25
0.5
0.75
1
1 exp 0.5− x⋅( )−
1 exp x−( )−
exp 0.5− x( ) exp x−( )−
1 exp x−( )−( )
1 exp 0.5− x( )− exp 0.5− x⋅( )− exp x−( )+
1 exp x−( )−( )
xFig.5.14.b Variaţia lui εmax, εmin şi Δε pentru diferite valori ale amortizării şi α=0.5

Popa Ion Florin, Marin Cornel, Filip Viviana
300
Se defineşte coeficientul de umplere la încărcare α:
⎟⎠⎞
⎜⎝⎛ −=
Δ−=
ΔΔ= αα 1
TtT
Tt;
Tt idi (5.34)
şi se fac notaţiile: τ
μ T= ; ;)(t,t d
di
i ματ
μαμτ
μ −=Δ
==Δ
= 1 ; (5.35)
Relaţiile (5.35) devin:
μ
αμσε −
−
−−
=ee
Emax 110 ;
μ
μμασε −
−−−
−−
=e
eeE
)(
min 1
10 ; (5.36)
μ
μμααμσε −
−−−−
−+−−
=Δe
eeeE
)(
11 1
0 .
În figurile 5.14 a,b,c s-au reprezentat grafic dependenţele celor trei mărimi date de relaţiile (5.36) în funcţie de variabila τμ /T= care este invers proporţională cu factorul de timp τ şi direct proporţională cu coeficientul de amortizare λ, pentru următoarele valori ale parametrilor 10 =E/σ şi coeficienţilor de umplere: α=0,25; α=0,5; α=0,75. Se observă din cele trei diagrame că pentru valori mici ale variabilei x, sau pentru valori mari ale coeficientului de amortizare λ, valoarea deformaţiilor maxime şi minime sunt direct proporţionale cu valoarea parametrului α.
În cazul particular: ε0=0, 1/0 =σ E , T=10s, τ=5s şi μ=2 aplicând relaţiile obţinute pentru două faze de încărcare şi respectiv două faze de descărcare s-au obţinut răspunsurile din figurile 5.15.a,b,c.
0 2 4 6 8 100
0.25
0.5
0.75
11
0
1 exp 0.75− x⋅( )−
1 exp x−( )−
exp 0.25− x( ) exp x−( )−
1 exp x−( )−( )
1 exp 0.75− x( )− exp 0.25− x⋅( )− exp x−( )+
1 exp x−( )−( )
100 x
Fig.5.14.c Variaţia lui εmax, εmin şi Δε pentru diferite valori ale amortizării şi α=0.75

Modelarea şi simularea sistemelor mecatronice
301
0 1 2 3 4 5 6 7 8 90
0.2
0.4
0.6
0.8
1
f1 x( )
x
0 0.5 10
0.2
0.4
0.6
0.8
1
f2 x( )
x0 1 2 3 4 5 6 7 8 9
0
0.2
0.4
0.6
0.8
1
f3 x( )
x0 0.5 1
0
0.2
0.4
0.6
0.8
1
f4 x( )
xFig. 5.15.c. Simularea comportării pentru un coeficient de umplere α3=0,9
0 1 2 3 4 50
0.16
0.32
0.48
0.64
0.8
f1 x( )
x0 1 2 3 4 5
0
0.16
0.32
0.48
0.64
0.8
f2 x( )
x0 1 2 3 4 5
0
0.16
0.32
0.48
0.64
0.8
f3 x( )
x
0 1 2 3 4 50
0.16
0.32
0.48
0.64
0.8
f4 x( )
x
Fig. 5.15.b. Simularea comportării pentru un coeficient de umplere α=0,5
0 0.510
0.2
0.4
0.6
0.8
1
f1 x( )
x0 1 2 3 4 5 6 7 8 9
0
0.2
0.4
0.6
0.8
1
f2 x( )
x0 0.5 1
0
0.2
0.4
0.6
0.8
1
f3 x( )
x0 1 2 3 4 5 6 7 8 9
0
0.2
0.4
0.6
0.8
1
f4 x( )
xFig. 5.15.a. Simularea comportării pentru un coeficient de umplere α=0,1

Popa Ion Florin, Marin Cornel, Filip Viviana
302
În figurile 5.16.a,b,c,d se prezintă schema bloc şi rezultatele obţinute folosind programul SIMULINK .
Fig.5.16.b. Răspunsul modelului la simularea încărcării cu impulsuri dreptunghiulare cu un coeficient de umplere α1=0,1
Fig.5.16.a. Schema bloc SIMULINK pentru simularea încărcării cu impulsuri dreptunghiulare

Modelarea şi simularea sistemelor mecatronice
303
Fig.5.16.c. Răspunsul modelului la simularea încărcării cu impulsuri dreptunghiulare cu un coeficient de umplere α2=0,5
Fig.5.16.d. Răspunsul modelului la simularea încărcării cu impulsuri dreptunghiulare cu un coeficient de umplere α1=0,1

Popa Ion Florin, Marin Cornel, Filip Viviana
304
5.6.5. Simularea comportării la impulsuri dreptunghiulare folosind
descompunerea lor în armonice În acest caz se face descompunerea în armonice folosind dezvoltarea în serii
Fourier a unei funcţiei periodice şi reţinerea unui număr din primele armonice ale dezvoltări. Funcţia periodică de perioadă T=2π corespunzătoare unui semnal de tip impuls dreptunghiular cu Δti=Δtd este definită astfel (fig. 5.17):
( )( )⎩
⎨⎧
∈∈+
=πππσ20
00
,tpentru,tpentru
)t(f (5.37)
Formula de dezvoltare a unei funcţii periodice în serii Fourier este:
( )∑∞
=
++=1
0k
kk ktsinbktcosaa)t(f (5.38)
Coeficienţii Fourier se calculează conform relaţiilor generale:
( ) ;dttkcos)t(fT
a;dt)t(fT
aT
k
T
∫∫ ==00
021 ω (5.39)
( ) .dttksin)t(fT
bT
k ∫=0
2 ω (5.40)
în care: π2=T , 12 == T/πω ; (5.41) Înlocuind pentru valorile funcţiei date în relaţia (5.41) se obţine:
01
2221
0
02
0
0
0
02
00
=⎥⎥⎦
⎤
⎢⎢⎣
⎡==
=⎥⎥⎦
⎤
⎢⎢⎣
⎡==
∫∫
∫∫ππ
ππ
πσ
π
σπσ
π
dtktcosdtktcos)t(fa
dt)t(fdt)t(fa
k
(5.42)
k)(dtktsindtktsin)t(fb
k
k111 0
0
02
0
−−⋅=
⎥⎥⎦
⎤
⎢⎢⎣
⎡== ∫∫ π
σπσ
π
ππ
(5.43)
t
f
Fig. 5.17
π 2π
+σ0
3π

Modelarea şi simularea sistemelor mecatronice
305
Deoarece k este un număr natural, coeficienţii bk se mai scriu:
⎪⎩
⎪⎨
⎧
−=−
==
1212
1220
0 nkpentru)n(
nkpentrubk
πσ (5.44)
Se obţine dezvoltarea în serie Fourier :
∑∞
= −−
+=1
00
12122
2 n nt)nsin()t(f
πσσ (5.45)
Reţinând primele nouă armonice din dezvoltarea (5.45) se obţine o bună aproximare a funcţiei periodice date de relaţia (5.39):
⎟⎠⎞
⎜⎝⎛ +++++≅
1117
55
33
12
200 )tsin(...)tsin()tsin(tsin)t(f
πσσ (5.46)
Folosind rezultatele obţinute în cazul simulării cu funcţii armonice:
( )( )2
00 1 τω
ωτωωσεε τ
+⋅−
+=− tcostsin
Eet
t
(5.47)
şi considerând ε0=0, pentru cele nouă armonice se obţin următoarele răspunsuri:
( )( )
115311 2
0 ,...,,,k,k
)tkcos(k)tksin(E
tk =+
⋅−=
ωτωωτωσε (5.48)
Prin suprapunerea celor nouă răspunsuri (5.48) şi a răspunsului pentru semnalul treaptă σ0 se obţine rezultatul din figura 5.18.
a 1:=
f1 t( ) 520π
sin t( )
1 a( )2+
sin 3 t⋅( )
3
1 3 a⋅( )2++
sin 5 t⋅( )
5
1 5 a⋅( )2++
sin 7 t⋅( )
7
1 7 a⋅( )2++
sin 9 t⋅( )
9
1 9 a⋅( )2++
sin 11 t⋅( )
11
1 11 a⋅( )2++
sin 13 t⋅( )
13
1 13 a⋅( )2++
sin 15 t⋅( )
15
1 15 a⋅( )2++
sin 17 t⋅( )
17
1 17 a⋅( )2++
⎡⎢⎢⎢⎣
⎤⎥⎥⎥⎦
⋅+:=
f2 t( )20π
a cos t( )
1 a( )2+
a cos 3 t⋅( )⋅
1 3 a⋅( )2++
a cos 5 t⋅( )⋅
1 5 a⋅( )2++
a cos 7 t⋅( )
1 7 a⋅( )2++
a cos 9 t⋅( )
1 9 a⋅( )2++
a cos 11 t⋅( )
1 11 a⋅( )2++
a cos 13 t⋅( )
1 13 a⋅( )2++
a cos 15 t⋅( )
1 15 a⋅( )2++
a cos 17 t⋅( )
1 17 a⋅( )2++⎡
⎢⎣
⎤⎥⎦
⋅:=
f1 t( ) f2 t( )−
t
Fig. 5.18. Simularea prin descompunerea impulsurilor dreptunghiulare în nouă armonice

Popa Ion Florin, Marin Cornel, Filip Viviana
306
5.6.6. Simularea comportării la încărcarea cu un semnal dreptunghiular alternant simetric În cazul unui semnal dreptunghiular alternant-simetric de amplitudine şi perioadă
constantă, cu Δti=Δtc , având forma din figura 5.19 pentru faza de întindere (+σ0) deformaţia variază conform (5.10) după o lege exponenţială:
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛−+=
−−ττ σεεtt
i eE
et 100 (5.49)
Pentru faza de compresiune cu tensiunea (-σ0) deformaţia variază conform (5.10) după legea exponenţială:
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛−−=
−−ττ σεεtt
c eE
et 100 (5.50)
Dacă se consideră că la întindere valoarea deformaţiei iniţiale este ε0=0 , conform (5.49), la sfârşitul fazei se obţine deformaţia:
( ) ( ) ( )xE
eE
t iii −−=−−=Δ= − 11 00
1σσεε μ (5.51)
în care s-a notat: xeee ii === −−− μμμ (5.52) Ţinând seama de relaţia (5.50) şi de faptul că Δti=Δtc se obţine deformaţia la
sfârşitul fazei de compresiune:
( ) ( )( )xxE
tcc −−−=Δ= 1102
σεε (5.53)
Repetând raţionamentul pentru o nouă încărcare cu (+σ0) şi compresiune cu (-σ0) se obţine respectiv:
( )( )
( )( )3204
203
11
11
xxxxE
xxxE
−+−−−=
+−−=
σε
σε (5.54)
După (2n) faze de întindere şi compresiune se obţin următoarele expresii ale deformaţiilor:
σ0
Δti
Δtc
Δti
Δtc
Fig. 5.19
σ
t
Δti
-σ0

Modelarea şi simularea sistemelor mecatronice
307
( )( )2232012 11 −− ++−+−−= n
n x...xxxxEσε (5.55)
( )( )123202 11 −−+−+−−−= n
n x...xxxxEσε (5.56)
Termenii din parantezele de mai sus se scriu:
xxx...xxx
xxx...xxx
nn
nn
++
=−+−+−
++
=++−+−
−
−−
111
111
21232
122232
(5.57)
Trecând la limită în expresiile de mai sus se obţine:
μ
μ
μ
μ
μ
μ
σεεε
σεε
σεε
−
−
−
−
−
−
−
+−
=−=Δ
+−
−==
+−
==
ee
E
ee
E
ee
E
minmax
nmin
nmax
112
1111
0
02
012
(5.58)
Pentru valoarea parametrului 10 =Eσ , în figura 5.20 sunt reprezentate cele trei
mărimi date de relaţia (5.58) în funcţie de parametrul τ
μ2T
= .
0 1 2 3 4 51
0.5
0
0.5
1
1.5
2
1 exp x−( )−
1 exp x−( )+
1− exp x−( )+
1 exp x−( )+
2 2 exp x−( )−
1 exp x−( )+
Fig. 5.20. Variaţia deformaţiilor în funcţie de μ pentru un număr mare de semnale

Popa Ion Florin, Marin Cornel, Filip Viviana
308
În figurile 5.21.a,b se prezintă schema bloc şi rezultatele obţinute folosind programul SIMULINK .
Fig.5.21.a. Schema bloc pentru simularea încărcării cu semnal dreptunghiular alternativ
Fig.5.21.b. Răspunsul modelului la simularea încărcării cu semnal dreptunghiular alternativ

Modelarea şi simularea sistemelor mecatronice
309
5.6.7. Simularea comportării la un semnal dreptunghiular alternant simetric prin descompunerea lui în armonice În acest caz se face descompunerea în armonice folosind dezvoltarea în serii
Fourier a unei funcţiei periodice şi reţinerea unui număr din primele armonice ale dezvoltări. Funcţia periodică de perioadă T=2π corespunzătoare unui semnal de tip impuls dreptunghiular cu Δti=Δtd este definită astfel (fig. 5.22):
( )( )⎩
⎨⎧
∈−∈+
=ππσπσ
20
0
0
,tpentru,tpentru
)t(f (5.59)
Formula de dezvoltare a unei funcţii periodice în serii Fourier este:
( )∑∞
=
++=1
0k
kk ktsinbktcosaa)t(f (5.60)
Coeficienţii Fourier se calculează conform relaţiilor generale:
( )
( ) .dttksin)t(fT
b
;dttkcos)t(fT
a;dt)t(fT
a
T
k
T
k
T
∫
∫∫
=
==
0
000
2
21
ω
ω
(5.61)
în care: π2=T , 12 == T/πω (5.62) Pentru valorile funcţiei date de relaţia (5.59) se obţine:
k)(dtktsindtktsindtktsin)t(fb
dtktcosdtktcosdtktcos)t(fa
dt)t(fdt)t(fdt)t(fa
k
k
k
1121
01
022
1
02
0
02
0
2
0
02
0
2
0
02
00
−−⋅=
⎥⎥⎦
⎤
⎢⎢⎣
⎡−==
=⎥⎥⎦
⎤
⎢⎢⎣
⎡−==
=⎥⎥⎦
⎤
⎢⎢⎣
⎡+==
∫∫∫
∫∫∫
∫∫∫
πσ
πσ
π
πσ
π
πσ
π
π
π
ππ
π
π
ππ
π
π
ππ
(5.63)
Deoarece k este un număr natural, coeficienţii bk se mai scriu:
t
f
Fig.5.22
π 2π
+σ0
-σ0
3π

Popa Ion Florin, Marin Cornel, Filip Viviana
310
⎪⎩
⎪⎨
⎧
−=−
==
1212
1420
0 nkpentru)n(
nkpentrubk
πσ (5.64)
Se obţine dezvoltarea în serie Fourier :
∑∞
= −−
=1
0
12124
n nt)nsin()t(f
πσ (5.65)
Folosind rezultatele obţinute în cazul simulării cu funcţia armonică sinωt:
( )( )2
00 1 τω
ωτωωσεε τ
+⋅−
+=− tcostsin
Eet
t
(5.66)
şi considerând ε0=0, pentru primele nouă armonice se obţin răspunsurile:
( )( )
115311 2
0 ,...,,,k,k
)tkcos(k)tksin(E
tk =+
⋅−=
ωτωωτωσε (5.67)
Prin suprapunerea celor nouă răspunsuri (5.67) se obţine (fig. 5.18):
( )( )∑
= −+−⋅−−
+=9
12
00
1211212
2 k )k(t)kcos(kt)ksin(
EEt
τωωωτωσσε (5.68)
Rezultatele sunt prezentate în figura 5.23. a 1:=
f1 t( )40π
sin t( )
1 a( ) 2+
sin 3 t⋅( )
3
1 3 a⋅( ) 2+
+
sin 5 t⋅( )
5
1 5 a⋅( ) 2+
+
sin 7 t⋅( )
7
1 7 a⋅( ) 2+
+
sin 9 t⋅( )
9
1 9 a⋅( ) 2+
+
sin 11 t⋅( )
11
1 11 a⋅( ) 2+
+
sin 13 t⋅( )
13
1 13 a⋅( ) 2+
+
sin 15 t⋅( )
15
1 15 a⋅( ) 2+
+
sin 17 t⋅( )
17
1 17 a⋅( ) 2+
+
⎡⎢⎢⎢⎣
⎤⎥⎥⎥⎦
⋅:=
f2 t( )40π
a cos t( )
1 a( ) 2+
a cos 3 t⋅( )⋅
1 3 a⋅( ) 2+
+a cos 5 t⋅( )⋅
1 5 a⋅( ) 2+
+a cos 7 t⋅( )
1 7 a⋅( ) 2+
+a cos 9 t⋅( )
1 9 a⋅( ) 2+
+a cos 11 t⋅( )
1 11 a⋅( ) 2+
+a cos 13 t⋅( )
1 13 a⋅( ) 2+
+a cos 15 t⋅( )
1 15 a⋅( ) 2+
+a cos 17 t⋅( )
1 17 a⋅( ) 2+
+⎡⎢⎣
⎤⎥⎦
⋅:=
f1 t( ) f2 t( )−
t
Fig. 5.23. Simularea prin descompunerea semnalului dreptunghiular alternant simetric în armonice folosind modelul Voigt-Kelvin

Modelarea şi simularea sistemelor mecatronice
311
5.6.8. Modelul vâscoelastic Voigt-Kelvin generalizat
Acest model este format din n elemente Voigt-Kelvin legate în serie (fig.5.24).
Se pot scrie următoarele relaţii de echilibru şi de continuitate pentru
elementele Voigt- Kelvin înseriate:
n
nncnnnkncnkn
ckck
ckck
...;E;
...;E;
;E;
ε++ε+ε+ε=εελ=σε=σσ=σ+σ
ελ=σε=σσ=σ+σελ=σε=σσ=σ+σ
321
22222222
11111111
&
&
&
(5.69)
Notând: ;EE
;j
jjjjj
jjj
σεατετλ
εαε =+⇒== & (5.70)
Dacă se însumează relaţiile (5.70) se obţine:
∑∑∑===
==+n
kj
n
j j
n
jjj α;
Eσατεε
11111
& (5.71)
Pentru n=2 se scriu următoarele relaţii:
( )
1
11
21
212211
=+
⎟⎟⎠
⎞⎜⎜⎝
⎛+=++
αα
σεατατεEE
& (5.72)
Relaţia diferenţială (5.71) se ma scrie:
στατα
ετατα
ε ⎟⎟⎠
⎞⎜⎜⎝
⎛+
+=
++
2122112211
1111EE
& (5.73)
Notând: EEE
; 11111
212211=+=
+ ττατα (5.74)
se obţine ecuaţia (5.7) crespunzătoare modelului Voigt - Kelvin:
)t(Eσ
τε
τε 11
=+& (5.75)
Prin alegerea corespunzătoare a parametrilor ),(E,E,, 212121 ααττ se obţin valorile dorite pentru τ şi E.
Fig. 5.24 Modelul vâscoelastic Voigt-Kelvin generalizat
σ
ε λ1
E1
λ2
E2
λn
En
...

Popa Ion Florin, Marin Cornel, Filip Viviana
312
5.7. MODELUL VÂSCOELASTIC MAXWELL
Modelul vâscoelastic Maxwell este un model folosit mai puţin decât Voigt Kelvin în modelarea şi simularea dinamicii sistemelor reologice, fiind format dintr-un element liniar elastic Hooke şi un element liniar vâscos Newton legate în serie ca în figura 5.55.
Pentru a deduce ecuaţia diferenţială a modelui vâscoelastic Maxwell se observă din figura 5.25 că tensiunea σ în cele două elemente are aceeaşi valoare iar deformaţia totală ε este egală cu suma deformaţiilor celor două elemente:
λσεελσ
σεεσ
εεεεεεσσσ
cccc
kkkk
ckck
kc
EE
=⇒=
=⇒=
+=⇒+===
&&
&&
&&&
(5.76)
Eliminând ck εsiε se obţine relaţia diferenţială a modelului Maxwell:
⎟⎠⎞
⎜⎝⎛ +=⇔+= σ
τσε
λσσε 11
&&&
&EE
(5.77)
unde s-a notat: E/λτ = timpul de întârziere al modelului. Soluţia ecuaţiei diferenţială (5.77) se obţine prin integrare directă:
( ) ( ) ( )∫ ⎥⎦
⎤⎢⎣⎡ ++= dttt
ECt
τσσε &
1 (5.78)
în care C este o constantă de integrare care se determină din condiţiile iniţiale: t=0 ⇒ ( ) 00 εε = (5.79)
Soluţia (5.78) este valabilă pentru orice tip de sarcină aplicată σ(t).
λ E
Fig. 5.25. Modelul vâscoelastic Maxwell
σ
ε

Modelarea şi simularea sistemelor mecatronice
313
5.7.1. Simularea fluajului şi descărcării după fluaj Pentru cazul particular al aplicării unei sarcini de tip treaptă ( ) 0σσ =t , soluţia
(5.78) devine:
( ) ( )E
ttCtτ
σε 00 −+= (5.80)
în care constanta C se determină din condiţia iniţială la t0. La aplicarea sarcinii constante de tip treaptă ( ) 0σσ =t datorită elementului
Hooke, modelul Maxwell suferă o deformaţie instantanee egală cu
E0
0σε = (5.81)
Înlocuind în relaţia (5.80) se obţine constanta de integrare:
E
C 0σ= (5.82)
Înlocuind constanta C soluţia (5.80) pentru fluaj devine:
( ) ⎟⎠⎞
⎜⎝⎛ −+=
τσε 00 1 ttE
t (5.83)
Soluţia (5.83) este o funcţie liniară având forma din figura 5.26.
Pentru următoarele valori ale parametrilor 100 .E
=σ
, τ =1, se obţine:
( ) ( )0110 tt,tε −+⋅= (5.84) La momentul t1 = 4s se obţine deformaţia ε1=0,5.
σ0
t0
σ
t
t0
ε
t
ε0
Fig. 5.26. Simularea comportării la fluaj şi a descărcării după fluaj
t1
t1
ε1 ε2

Popa Ion Florin, Marin Cornel, Filip Viviana
314
În cazul descărcării după fluaj se consideră în ecuaţia diferenţială (5.77) o sarcină nulă ( ) 0=tσ obţinându-se: C=ε (5.85)
Constanta C se determină din condiţia iniţială la momentul t1 ţinând seama că la descărcare elementul Maxwell suferă o revenire elastică instantanee :
⎟⎠⎞
⎜⎝⎛ −
=−=⇒=Δτ
σσεεσε 010012
0 ttEEE
. (5.86)
Rezultă deformaţia constantă în cazul descărcării după fluaj:
⎟⎠⎞
⎜⎝⎛ −
==τ
ttEσεε 010
2 (5.87)
În figurile 5.27.a,b se prezintă schema bloc şi rezultatele obţinute folosind programul SIMULINK .
Fig.5.27.a. Schema bloc SIMULINK pentru fluaj şi descărcarea după fluaj
Fig.5.27.b. Răspunsul modelului la fluaj şi descărcarea după fluaj

Modelarea şi simularea sistemelor mecatronice
315
5.7.2. Simularea la relaxare şi anularea deformaţiei după relaxare Dacă modelul Maxwell a suferit o anumită deformaţie ε1 în timpul unei încărcări la fluaj sub o tensiune σ0 pe o durată t=t1, pentru a păstra constantă această deformaţie ε1, tensiunea din epruvetă trebuie să scadă exponenţial.
Într-adevăr, conform ecuaţiei (5.77) ecuaţia diferenţială devine:
01=+ σ
τσ& (5.88)
şi are soluţia: τtt
eσ)t(σ1
0
−−
= (5.89) Soluţia (5.89) este o funcţie exponenţială având forma din figura 5.28.
Relaxarea se produce prin descărcarea elementului elastic, deformaţia elastică a
elementului Hooke fiind transferată elementului vâscos Newton, sub o sarcină variabilă exponenţial în timp.
Pentru anularea deformaţiei după relaxare se aplică la momentul t2 o tensiune negativă -σ2 astfel încât la momentul t3 se obţine deformaţia nulă (fig. 5.28).
Conform relaţiei (5.89) la momentul t2 tensiunea din element are valoarea:
τtt
eσσ12
01
−−
= (5.90) Pe intervalul (t1, t2) când asupra elementului acţionează o tensiune negativă -σ2,
soluţia generală la încărcarea cu un semnal de tip treaptă (5.80) se scrie:
( )τ
σεεε 1201
ttE
t −−−= (5.91)
Momentul t3 se obţine anulând expresia deformaţiei (5.91):
O
ε
t
Fig. 5.28. Simularea relaxării folosind modelul Maxwell
σ
t t1
ε1
O
σ1
t1

Popa Ion Florin, Marin Cornel, Filip Viviana
316
( )
2
0123 σ
τEεεtt −+= (5.92)
La momentul t3 se anulează tensiunea negativă -σ2 păstrându-se în continuare o deformaţie nulă, conform ecuaţiei diferenţiale (5.77) ca în figura 5.29:
0011=⇒=⇒⎟
⎠⎞
⎜⎝⎛ += εεσ
τσ
Eε &&& (5.93)
În figurile 5.30.a,b se prezintă schema bloc şi rezultatele obţinute folosind programul SIMULINK
O t
Fig. 5.29. Simularea anulării deformaţiei după relaxare
σ
t
ε1
O
σ0
ε0
-σ2
t3
t1
t2
t2
σ1
ε
Relaxare
Anularea deformaţiei
ε0

Modelarea şi simularea sistemelor mecatronice
317
Fig.5.30.a. Schema bloc SIMULINK pentru relaxare şi anularea deformaţiei
Fig.5.30.b. Răspunsul modelului la relaxare şi anularea deformaţiei

Popa Ion Florin, Marin Cornel, Filip Viviana
318
5.7.3. Simularea comportării la încărcarea cu o sarcină armonică În cazul unei sarcini armonice de forma:
( ) tωsinσtσ 0= (5.94) soluţia (5.78) devine:
( ) dtτ
tωsintωcosωEσεtε
t
∫ ⎟⎠⎞
⎜⎝⎛ ++=
0
00 (5.95)
Efectuând integrala din relaţia (5.88) se obţine:
( )
( ) ( )0220
0
00
1−
++=
⎟⎠⎞
⎜⎝⎛ −+=
tωsinτωE
σεtε
ωτtωcostωsin
Eσεtε
(5.96)
Defazajul ϕ0 între sarcina aplicată şi răspunsul modelului este:
τωϕ 1
0 =tg (5.97)
Pentru cazul particular ε0=2, 10 =σ , 100 =Eσ , ω=10 şi τ =1 soluţia (5.96) şi
sarcina armonică aplicată (5.94) au forma din figura 5.31. Defazajul depinde de pulsaţia sarcinii armonice aplicate cât şi de timpul de
întârziere τ . Pentru valorile numerice de mai sus rezultă: ),(rad,)/(arctg 0
0 715101 == τωϕ (5.98)
În figurile 5.32.a,b se prezintă schema bloc şi rezultatele obţinute folosind
programul SIMULINK .
f1 t( ) sin 10t( ):=
f2 t( ) 2 10 sin 10 t⋅( )110
cos 10 t⋅( )−⎛⎜⎝
⎞⎟⎠
⋅+:=
0 0.5 1 1.5 210
5
0
5
10
15
f1 t( )
f2 t( )
tFig. 5.31. Simularea încărcării cu o sarcină armonică

Modelarea şi simularea sistemelor mecatronice
319
Fig. 5.32.a. Schema bloc pentru simularea încărcării cu o sarcină armonică
Fig.5.32.b. Răspunsul modelului la încărcarea cu o sarcină armonică

Popa Ion Florin, Marin Cornel, Filip Viviana
320
5.7.4. Simularea comportării la încărcarea cu impulsuri dreptunghiulare În cazul unei încărcări cu impulsuri dreptunghiulare de amplitudine şi perioadă
constantă, având forma din figura 5.33, ţinând seama de expresia soluţiei la fluaj (5.80) şi considerând momentul iniţial t0=0, la sfârşitul primei faze de încărcare (Δti) se obţine deformaţia:
( )iμEσε += 10
1 (5.99)
în care s-a notat: τ
μ ii
tΔ= . (5.100)
În timpul fazei de descărcare, elementul Maxwell suferă o revenire elastică
instantanee cu Eσεε 0
0Δ == , astfel încât deformaţia în timpul fazei de descărcare
conform relaţiei (5.85) este constantă (fig.5.33):
iμEσεεε 0
12 Δ =−= (5.101)
σ0
σ
t
t
ε0
Fig. 5.33. Simularea comportării la impulsuri dreptunghiulare
t1
t1
ε1
ε3
t2 t3 t4
t2 t3 t4
ε2
ε4

Modelarea şi simularea sistemelor mecatronice
321
Repetând raţionamentul, se obţine la sfârşitul celei de a doua încărcări:
( )iμEσε 210
3 += (5.102)
şi respectiv la sfârşitul celei de a doua descărcări, deformaţia:
iμEσε 0
4 2= (5.103)
După 2n cicluri de încărcare şi descărcare obţine:
( )in μnEσε +=− 10
12 (5.104)
in μEσnε 0
2 = (5.105)
Se observă din relaţiile (5.104) şi (5.105) că deformaţia creşte discontinuu, situaţie care nu se întâlneşte în practică decât foarte rar. De aceea modelului Maxwell i se ataşează un element Hooke care limitează aceste deformaţii, obţinându-se astfel modelul Zener.
În figurile 5.34.a,b,c,d se prezintă schema bloc şi rezultatele obţinute petru diferite valori ale coeficientului de umplere folosind programul SIMULINK.
Fig. 5.34.a. Schema bloc SIMULUNK pentru simularea încărcării cu impulsuri dreptunghiulare

Popa Ion Florin, Marin Cornel, Filip Viviana
322
Fig.5.34.b. Răspunsul modelului la simularea încărcării cu impulsuri dreptunghiulare cu un coeficient de umplere α1=0,1
Fig.5.34.c. Răspunsul modelului la simularea încărcării cu impulsuri dreptunghiulare cu un coeficient de umplere α2=0,5
Fig.5.34.d. Răspunsul modelului la simularea încărcării cu impulsuri dreptunghiulare cu un coeficient de umplere α3=0,9

Modelarea şi simularea sistemelor mecatronice
323
5.7.5. Simularea comportării la încărcarea cu un semnal dreptunghiular alternant simetric În cazul unei încărcări cu un semnal dreptunghiular alternant simetric de
amplitudine şi perioadă constantă, având forma din figura 5.35, ţinând seama de expresia soluţiei la fluaj:
( ) ⎟⎠⎞
⎜⎝⎛ −+=
τσε 00 1 ttE
t (5.106)
şi considerând momentul iniţial t0=0, se obţine la sfârşitul primei faze de încărcare deformaţia (fig. 5.35):
⎟⎠⎞
⎜⎝⎛ Δ+=τ
σε itE
101 (5.107)
sau: ( )iEμσε += 10
1 (5.108)
în care s-a notat: τμ /tii Δ= . (5.109) La schimbarea semnului tensiunii de încărcare +σ0 , elementul Maxwell suferă
mai întâi o deformaţie elastică instantanee: E/00 22 σεε −=−=Δ astfel încât la începutul fazei de compresiune deformaţia este (fig. 5.35):
( )1010 −= iE
μσε (5.110)
σ0
σ
t
t
ε0
Fig. 5.35. Simularea comportării la un semnal dreptunghiular alternant simetric
t1
ε1
t2 t3
ε10
-σ0
ε2
ε20
ε3
ε30
Δti Δtc Δti Δtc

Popa Ion Florin, Marin Cornel, Filip Viviana
324
La sfârşitul fazei de compresiune se obţine deformaţia:
Et
Ec
i00
2 1 στ
μσε −=⎟⎠⎞
⎜⎝⎛ Δ
−−= (5.111)
întrucât: cicc si/t μμτμ =Δ= (5.112) La o nouă schimbare a semnului tensiunii de încărcare +σ0 elementul Maxwell suferă o deformaţie elastică instantanee E/00 22 σεε ==Δ astfel încât deformaţia la începutul fazei de compresiune devine (fig. 5.35):
( )1010 −= iE
μσε (5.113)
Repetând raţionamentul, se obţine la sfârşitul celei de a doua încărcări respectiv la sfârşitul celei de a doua descărcări:
( )μσε += 103 E
şi E
04
σε −= (5.114)
În figurile 5.36.a,b se prezintă schema bloc şi rezultatele obţinute folosind programul SIMULINK.
Fig. 5.36.a. Schema bloc SIMULUNK pentru simularea încărcării cu impulsuri dreptunghiulare

Modelarea şi simularea sistemelor mecatronice
325
5.7.6. Modelul vâscoelastic Maxwell generalizat Modelul vâscoelastic Maxwell generalizat este format din n elemente vâscoelastice Maxwell legate în paralel (fig. 5.37).
Deformaţia ε pentru cele n elemente vâscoelastice Maxwell este aceeaşi iar tensiunea σ este egală cu suma tensiunilor din cele n elemente. Se pot scrie următoarele relaţii de echilibru şi de continuitate:
λ1 E1
Fig. 5.37. Modelul vâscoelastic Maxwell generalizat
σ
ε
λ2 E2
λn En
...
Fig. 5.36.b. Răspunsul modelului la încărcarea cu impulsuri dreptunghiulare

Popa Ion Florin, Marin Cornel, Filip Viviana
326
n
ckck
ckck
ckck
σ...σσσσ...;εεε;εεε
...;ελσ;εEσ;σσσελσ;εEσ;σσσ
++++=+=+=
========
321
2211
222222222
111111111
&
&
(5.115)
Însumând relaţiile:
jj
jjj
j
j
j
jcjkj
EE
E
σλ
σε
λσσ
εεεε
+=⇔
+=⇔+=
&&
&&&&&
(5.116)
se obţine:
∑∑∑===
+=n
jj
j
jn
jj
n
jj
EE
111σ
λσε && (5.117)
Notând jj
jEτλ1
= şi impunând condiţia suplimentară: σασ jj = , unde αi
reprezintă ponderea tensiunii elementului i din tensiunea totală se obţine relaţia diferenţială a modelului Maxwell gneralizat:
στα
σε ⎟⎟⎠
⎞⎜⎜⎝
⎛+=⎟
⎟⎠
⎞⎜⎜⎝
⎛∑∑==
n
j j
jn
jjE
11&& (5.111)
Notând: ∑∑==
==n
i i
in
ii ;EE
11
1ττ
α (5.112)
se obţine ecuaţia diferenţială (5.77) corespunzătoare modelului Maxwell:
⎟⎠⎞
⎜⎝⎛ += σ
τσε 11&&
E (5.113)
Pentru limitarea deplasării modelului Maxwell generalizat se ataşează în paralel un element Hooke ca în figura 5.38, obţinându-se astfel un model Zener generalizat.

Modelarea şi simularea sistemelor mecatronice
327
5.8. MODELUL VÂSCOELASTIC ZENER
Modelul vâscoelastic Zener este un model folosit frecvent în modelarea şi
simularea dinamicii sistemelor reologice, fiind format dintr-un element liniar elastic Hooke şi un Maxwell legate în paralel ca în figura 5.39.
Deformaţia ε pentru cele două elemente Maxwell şi Hooke este aceeaşi iar tensiunea σ este egală cu suma tensiunilor:
2223111
221121
121
kkcckk
kck
ckkck
E;;E;;
εσελσεσσσσσσσσσεεεεεεε
======+=+=⇒=+=
&
&&&
(5.114)
Fig. 5.38. Modelul vâscoelastic Zener generalizat
λ1 E1
σ
ε
λ2 E2
λn En
...
En+1
λ E1
Fig. 5.39. Modelul vâscoelastic Zener
σ
ε E2

Popa Ion Florin, Marin Cornel, Filip Viviana
328
Eliminând 21 kck ,, εεε din relaţiile (5.114) se obţin următoarele relaţii:
σεεεσεελσε
λεσεελελε
σεεσεε
&&&&&&&
&&&
&&&
=+−⇒=+
+−=⇒=+⇒=
=+⇒=+
21211
2211
211211
E)(EEE
EEE
EEEE
ck
ccck
kk
(5.115)
Eliminând εc , εk1 şi εk2 din relaţiile (5.115) se obţine relaţia diferenţială pentru simularea modelului vâscoelastic Zener:
⎟⎠⎞
⎜⎝⎛ +
+=
++ σσ
τε
τε &&
111
2121
2
EEEEE
(5.116)
unde s-a notat: 1E/λτ = timpul de întârziere al modelului.
Notând 21
2
EEEk+
= coeficientul elastic, ecuaţia diferenţială (5.116) devine:
⎟⎠⎞
⎜⎝⎛ +=+ σστ
ετ
ε &&1
2Ekk (5.117)
Ecuaţia diferenţială (5.117) are soluţia de forma:
( )( )
( )tρ
dtσστ
tρEkC
tε∫ ⎟
⎠⎞
⎜⎝⎛ ++
=&
1
2 (5.118)
în care: ( ) τ
τρ
kt
edtkexpt =⎟⎠⎞
⎜⎝⎛= ∫ (5.119)
Înlocuind în soluţia (5.118) se obţine soluţia generală a modelului Zener:
( )⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ ++= ∫
−dte
EkCet
ktkt
σστ
ε ττ &1
2 (5.120)
5.8.1. Simularea fluajului şi descărcării după fluaj Pentru cazul particular al fluajului sau al aplicării unei sarcini constante de tip
treaptă ( ) 0σσ =t soluţia (5.120) devine:
( )2
0
2
0
ECedte
EkCet
ktktkt στσε τττ +=
⎥⎥⎦
⎤
⎢⎢⎣
⎡+=
−−
∫ (5.121)
în care constanta C se determină din condiţia la momentul iniţial când sub acţiunea lui σ0 se produce deformaţia elastică instantanee:

Modelarea şi simularea sistemelor mecatronice
329
21
00EE
)(+
=σε (5.122)
Rezultă constanta C:
21
1
2
0
EEE
EC
+⋅−=
σ (5.123)
Înlocuind în expresia (5.121) se obţine:
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛
+−=
−τσεkt
eEE
EE
t21
1
2
0 1 (5.124)
Pentru cazul particular ε0=2, 102
0 =Eσ
k=0,5 (E1=E2) şi τ =1 se obţine variaţia
din figura 5.40. Se observă că simularea pe acest model se apropie foarte mult de situaţia reală: la momentul iniţial are loc o deformaţia elastică instantanee urmată de deformaţii permanante care cresc cu timpul.
După timpul t1 de acţiune a sarcinii constante σ0, se obţine deformaţia:
⎟⎟⎠
⎞⎜⎜⎝
⎛
+−=
−τσε
1
21
1
2
01 1
kt
eEE
EE
(5.125)
În cazul descărcării după fluaj se produce mai întâi o revenire elastică instantanee
cu: 21
0
EE +=Δ
σε (5.126)
Fig. 5.40. Comportarea la fluaj a modelului Zener
f1 t( ) 2 1 0.5exp 0.5− t( )−( ):= f1 5( ) 1.918=
0 1 2 3 4 50
0.4
0.8
1.2
1.6
2
f1 t( )
t

Popa Ion Florin, Marin Cornel, Filip Viviana
330
După această revenire elastică are loc descărcarea la fluaj după o lege exponenţială conform relaţiei (5.120):
( ) ( ) τkt
eεεtε−
−= Δ1 (5.127) Pentru k=0,5, ε1 -Δε =0,918 şi τ=1 se obţine variaţia din figura 5.41.
În figurile 5.42.a,b se prezintă schema bloc şi rezultatele obţinute folosind
programul SIMULINK.
Fig. 5.41. Comportarea modelului Zener la descărcarea după fluaj
0 1 2 3 4 50
0.4
0.8
1.2
1.6
2
0.918exp 0.5− t( )
t
Fig. 5.42.a. Schema bloc SIMULUNK pentru simularea fluajului şi descărcării după fluaj folosind modelul Zener

Modelarea şi simularea sistemelor mecatronice
331
5.8.2 Simularea relaxării şi anulării deformaţiei după relaxare Dacă în urma unei încărcări cu tensiunea constantă σ0 pe durata t1 s-a produs
deformaţia ε1, pentru a se menţine constantă această deformaţie, tensiunea trebuie să scadă exponenţial. Într-adevăr, ecuaţia diferenţială (5.117) devine:
121 ετ
στ
σ E=+& (5.128)
Ecuaţia diferenţială (5.128) are soluţia de forma:
τεσ1
12
tt
CeE)t(−
−+= (5.129)
în care constanta C se determină din condiţia la momentul iniţial:
12001 εσσσ EC)t( −=⇒= (5.130)
Înlocuind C se obţine expresia soluţiei pentru relaxare:
ττ σεσ11
012 1tttt
eeE)t(−
−−
−+⎟
⎟⎠
⎞⎜⎜⎝
⎛−= (5.131)
Din expresia (5.131) se observă că relaxarea nu depinde de valoarea coeficientului k, ci numai de valoarea tensiunii iniţiale σ0 , a constantei E2 şi de timpul de întârziere τ.
Pentru E2=10, σ0=100, ε1=1, τ=1 şi t1=0 se obţine variaţia exponenţială din figura 5.43. La echilibru valoarea tensiunii tinde spre valoarea 10122 == εσ E care reprezintă tensiunea din elementul Hoohe corespunzătoare unei deformaţii ε1.
Fig.5.42.b. Răspunsul modelului Zener la fluaj şi descărcarea după fluaj

Popa Ion Florin, Marin Cornel, Filip Viviana
332
În figurile 5.44.a,b se prezintă schema bloc şi rezultatele obţinute folosind programul SIMULINK .
Fig. 5.43. Comportarea modelului Zener la relaxare
0 1 2 3 4 50
20
40
60
80
100
10 1 exp t−( )−( )⋅ 100exp t−( )+
t
10
Fig. 5.44.a. Schema bloc SIMULUNK pentru simularea relaxării folosind modelul Zener

Modelarea şi simularea sistemelor mecatronice
333
Pentru anularea deformaţiei după relaxare, se aplică o tensiune constantă
negativă -σ1 la momentul t2 ( 1221 εσσ E=> ), astfel încât în primul moment se produce o revenire elastică instantanee (fig. 5.45):
21
12ΔEEσε+
= (5.132)
Fig. 5.44.b. Răspunsul la relaxare folosind modelul Zener
t
Fig. 5.45. Simularea anulării deformaţiei după relaxare
σ
t
ε1
σ0
Δε
-σ1
t1 t2
σ2
ε
Relaxare Anularea deformaţiei
Δε/2
σ1
t3

Popa Ion Florin, Marin Cornel, Filip Viviana
334
Conform relaţiei (5.131) la momentul t2 tensiunea are valoarea:
( ) τεσεσ12
120121
tt
eEE−
−−+= (5.133)
Pe intervalul (t2, t3) când asupra elementului acţionează tensiunea negativă -σ1, soluţia generală la fluaj (5.121) se scrie:
( )2
12
ECet
ttk σε τ −=−
− (5.134)
în care constanta C se determină din deformaţia la momentul iniţial:
21
1112
2ΔEEσεεε)t(ε+
−=−= (5.135)
Rezultă: ⎟⎟⎠
⎞⎜⎜⎝
⎛−
+−=
22111
12EEE
C σε (5.136)
Soluţia (5.134) devine: ( )2
12
21
21
2
11 E
σeEEEE
Eσεtε τ
ttk
−⎟⎟⎠
⎞⎜⎜⎝
⎛+−
−=−
− (5.137)
Deformaţia se anulează şi apoi devine negativă ca în figura 5.45. Dacă la momentul t3 tensiunea negativă -σ1 se anulează, elementul suferă o revenire elastică cu
21
1ΔEE
σε+
+= . Punând condiţia ( )21
13 EE
t+
−=σε în relaţia (5.137) se determină
momentul t3 al anulării tensiunii -σ1 .
În figurile 5.46.a,b se prezintă schema bloc şi rezultatele obţinute folosind programul SIMULINK.
Fig. 5.46.a. Schema bloc SIMULUNK pentru simularea descărcării după
relaxare folosind modelul Zener

Modelarea şi simularea sistemelor mecatronice
335
5.8.3. Simularea comportării la încărcarea armonică În cazul unei sarcini armonice de forma: ( ) tsint ωσσ 0= soluţia generală (5.120)
se scrie:
( ) ( )⎥⎥⎦
⎤
⎢⎢⎣
⎡++= ∫
−dttcostsine
Eket
ktkt
ωτωωτσεε ττ
2
00 (5.138)
Efectuând integrala din relaţia (5.138) se obţine soluţia de forma:
( ) 222
22
21
00
1ωτ
ωτωωωτσεε τ
+⋅−++
++=
−
ktcos)k(tsin)k(
EEet
kt
(5.139)
Pentru cazul particular: ε0=2; 102
0 =Eσ ; ω=10 ; k=0,5 (E1=E2) şi τ =1 soluţia
(5.106) se scrie:
( ) ( ) ( )100250
10105010100502
10500 +
⋅−++= −
,tcos,tsin).(et t.εε (5.140)
În figura 5.47 s-au reprezentat atât diagrama de încărcare: )tsin()t( 10=σ cât şi diagrama răspunsului )t(ε .
Din aceste diagrame se observă că între încărcare şi răspunsul modelului există defazajul ϕ0 . Într-un regim staţionar (când termenul τε /kte−0 devine neglijabil) defazajul ϕ0 se determină cu ajutorul relaţiei:
2201ωττωϕ
+−
−=k
)k(tg (5.141)
Fig. 5.46.b. Răspunsul la anularea deformaţiei după relaxare

Popa Ion Florin, Marin Cornel, Filip Viviana
336
În figurile 5.48.a,b se prezintă schema bloc şi rezultatele obţinute folosind programul SIMULINK .
Fig. 5.47. Simularea comportării modelului Zener sub acţiunea unei sarcini armonice
f1 t( ) sin 10t( ):=
f2 t( ) 2exp 0.5− t( )5 0.5 100+( )sin 10t( ) 5 cos 10t( )⋅−[ ]
0.25 100++:=
0 1 2 3 45
3
1
1
3
5
7
9
f1 t( )
f2 t( )
t
Fig. 5.48.a. Schema bloc SIMULUNK pentru simularea încărcării cu o sarcină armonică

Modelarea şi simularea sistemelor mecatronice
337
5.8.4 Simularea comportării la încărcarea cu impulsuri dreptunghiulare În cazul unor încărcări şi descărcări succesive de tip impuls dreptunghiular ca în
figura 5.49 se introduc coeficienţii de încărcare respectiv descărcare:
idi
i ,Tt ααα −=
Δ= 1 (5.142)
şi se notează : τ
μ T= (5.143)
Pentru faza de încărcare cu +σ0 se consideră ε0=0 şi ţinând seama de relaţia (5.124) se obţine deformaţia:
⎟⎟⎠
⎞⎜⎜⎝
⎛
+−=
Δ−
τσεitk
eEE
EE 21
1
2
01 1 (5.144)
+σ
Δti Δtd Δti Δtd
Fig.5.49. Schema încărcării cu impulsuri dreptunghiulare
σ
t
Δti
Fig. 5.48.b. Răspunsul sistemului la încărcarea cu o sarcină armonică

Popa Ion Florin, Marin Cornel, Filip Viviana
338
Se notează:
11
2
+=⇒=
NNk
EEN şi xe iN
N
=+− μα
1 (5.145)
Relaţia (5.144) devine:
⎟⎠⎞
⎜⎝⎛
+−=
11
2
01 N
xEσε (5.146)
La sfârşitul fazei de descărcare, ţinând seama de relaţia (5.127) şi de revenirea
elastică cu 21
0
EE +=Δ
σε se obţine deformaţia:
( ) dNN
eμα
εεε 112
+−
⋅Δ−= (5.147) Dacă se notează :
ye dNN
=+− μα
1 (5.148) deformaţia la sfârşitul fazei de descărcare dată de relaţia (5.147) devine:
yN
NxE
⎟⎠⎞
⎜⎝⎛
++
−=1
12
02
σε (5.149)
Repetând raţionamentul pentru al doilea ciclu se obţine (fig.5.50):
• la sfârşitul fazei de încărcare:
⎟⎟⎠
⎞⎜⎜⎝
⎛⎥⎦
⎤⎢⎣
⎡+
−⎟⎠⎞
⎜⎝⎛
++
−+= xN
yN
NxEσε
11
111
2
03 (5.150)
• la sfârşitul fazei de descărcare:
yxN
yN
NxNE
σε ⎟⎟⎠
⎞⎜⎜⎝
⎛⎥⎦
⎤⎢⎣
⎡+
−⎟⎠⎞
⎜⎝⎛
++
−++
=1
11
11
1
2
04 (5.151)

Modelarea şi simularea sistemelor mecatronice
339
5.8.5. Simularea comportării la încărcarea cu un semnal dreptunghiular alternant simetric
În cazul încărcării cu un semnal dreptunghiular alternativ de amplitudine şi perioadă constantă, având forma din figura 5.51, se notează:
τ
μααα T;T
tci =
Δ=== . (5.152)
t
Fig. 5.50. Simularea comportării la impulsuri dreptunghiulare
σ
t
ε1
σ0
Δε
t1 t2
ε
Δti
t3
ε0
Δtd Δti
t0
Δε

Popa Ion Florin, Marin Cornel, Filip Viviana
340
La sfârşitul fazei de încărcare cu tensiunea +σ0 , dacă se consideră ε0=0 şi şi ţine
seama de relaţia (5.124), se obţine deformaţia:
⎟⎟⎠
⎞⎜⎜⎝
⎛
+−=
Δ−τσε
tk
eEE
EE 21
1
2
01 1 (5.153)
Se notează: 11
2
+=⇒=
NNk
EEN şi xe N
N
=+− μα
1 (5.154)
Relaţia (5.153) devine:
⎟⎠⎞
⎜⎝⎛
+−=
11
2
01 N
xEσε (5.155)
Pentru faza de compresiune se ţine seama de relaţia (5.121):
( )2
0EσCetε τ
kt
−=−
(5.156)
t
Fig. 5.51. Simularea comportării la impulsuri dreptunghiulare
σ
t
ε1
σ0
Δε
t1 t2
ε
Δti t3
Δtc Δti t0
2Δε
2Δε
ε2
2Δε

Modelarea şi simularea sistemelor mecatronice
341
în care constanta C se determină din condiţia la momentul iniţial:
21
011
2Δ0EEσεεε)(ε+
−=−= (5.157)
Relaţia (5.156) pentru faza de compresiune devine:
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛−
+−
= +−
11
2 1
2
0 τt
NN
eN
xEσ)t(ε (5.158)
Deformaţia la sfârşitul acestei faze se scrie:
⎟⎠⎞
⎜⎝⎛ −
+−
= 11
2
2
02 x
Nx
Eσε (5.159)
Repetând raţionamentul pentru al doilea ciclu se obţine (fig.5.51): • la sfârşitul fazei de încărcare:
( )⎟⎠⎞
⎜⎝⎛ +
+−−
= 11
22
2
03 x
Nxx
Eσε (5.160)
• la sfârşitul fazei de compresiune: ( )
⎟⎟⎠
⎞⎜⎜⎝
⎛−
++−−
= 11
2222
2
04 x
Nxxx
Eσε (5.161)
În funcţie de valorile parametrilor N şi x se obţin diferite valori ale deformaţiilor la
sfârşitul fazelor de întindere compresiune. După un număr mare de cicluri, la limită, se obţin valori fixe pentru deformaţiile după faza de întindere respectiv de compresiune.

Popa Ion Florin, Marin Cornel, Filip Viviana
342
În figurile 5.52.a,b se prezintă schema bloc şi rezultatele obţinute folosind
programul SIMULINK .
Fig. 5.52.a. Schema bloc SIMULUNK pentru simularea încărcării cu un semnal dreptunghiular alternativ
Fig. 5.52.b. Rezultatul încărcării cu un semnal dreptunghiular alternativ

Modelarea şi simularea sistemelor mecatronice
343
5.9. MODELUL VÂSCOELASTIC VOIGT KELVIN – HOOKE
Modelul vâscoelastic Voigt-Kelvin– Hooke (VKH) este un model folosit frecvent
în modelarea şi simularea dinamicii sistemelor reologice, fiind format dintr-un element liniar elastic Hooke şi un element Voigt Kelvin legate în paralel ca în figura 5.53.
Cele două elemente Voigt- Kelvin şi Hooke sunt încărcate cu aceeaşi tensiune σ
iar deformaţia ε este egală cu suma deformaţiilor lor. Se pot scrie următoarele relaţii de echilibru şi de continuitate:
21
11
22211111
211
kk
ck
kkcckk
kck
εεεεε
;εEσ;ελσ;εEσ;σσσσ
+==
====+=
& (5.162)
Eliminând 231 kck ,, εεε din relaţiile (5.162) se obţine relaţia diferenţială a modelului VKH:
σλ
+⎟⎟⎠
⎞⎜⎜⎝
⎛+σ=ελ+ε &&
22
11 1
EEE
E (5.163)
Ecuaţia diferenţială (5.163) se mai scrie:
( )[ ]στστ
ετ
ε && NNE
++=+ 111
1 (5.164)
în care s-a notat: 2
1
EEN = raportul rigidităţilor elementelor Voigt Kelvin şi Hooke
1Eλτ = timpul de întârziere al modelului Voigt Kelvin.
λ1
E1
Fig. 5.53. Modelul vâscoelastic Voigt- Kelvin– Hooke (VKH)
σ
ε E2

Popa Ion Florin, Marin Cornel, Filip Viviana
344
Ecuaţia diferenţială (5.164) admite soluţia de forma:
( )
( )[ ] ( )
( )
( ) ⎟⎠⎞
⎜⎝⎛=⎟
⎠⎞
⎜⎝⎛=
+++=
∫
∫
τtexpdt
τexptρ:unde
tρ
dttρ)t(σNτtσ)N(Eτ
Ctε
1
11
1&
(5.165)
Soluţia generală a modelului se scrie sub forma:
( ) ( )[ ]⎥⎥⎦
⎤
⎢⎢⎣
⎡+++= ∫
−dte)t(Nt)N(
ECet
ttττ στσ
τε &11
1 (5.166)
5.9.1. Simularea fluajului şi descărcării după fluaj Pentru cazul particular al încărcării la fluaj sau a unei încărcări cu o sarcină de tip
treaptă +σ0 , soluţia (5.166) devine:
( ) ( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛−++=
−−ττ σ
εtt
eNE
Cet 111
0 (5.167)
în care constanta C se determină din deformaţia la momentul iniţial. Astfel, la aplicarea tensiunii +σ0 datorită elementului Hooke, modelul suferă o
deformaţie instantanee: 2
0
Eσε =Δ (5.168)
Înlocuind în relaţia (5.167) se obţine constanta de integrare 2
0
EC σ= şi soluţia
generală (5.167) devine: ( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛−+=
−τσεt
eNE
t 11
0 (5.169)
Pentru : 510 =E/σ , N=1 şi τ=1 se obţine variaţia din figura 5.54.
La sfârşitul fazei de încărcare (după t = 4s) se obţine deformaţia:
( ) 9084229254 4 ,e)( =−= −ε (5.170)
După timpul t1 se obţine deformaţia ε1 având expresia:
⎟⎟⎠
⎞⎜⎜⎝
⎛−+=
−τσε1
11
01
t
eNE
(5.171)

Modelarea şi simularea sistemelor mecatronice
345
În cazul descărcării după fluaj se produce mai întâi o revenire elastică instantanee:
2
0
Eσε =Δ (5.172)
După revenirea elastică are loc descărcarea la fluaj după o lege exponenţială
conform relaţiei (5.166): ( ) ( ) τεεεt
et−
Δ−= 1 (5.173)
Pentru valorile 510 =E/σ , N=1 şi τ=1 se obţine variaţia din figura 5.55.
Fig. 5.54. Comportarea la fluaj a modelului Voigt-Kelvin –Hooke 0 1 2 3 4
0
2
4
6
8
10
5 2 exp x−( )−( )
Fig. 5.55. Comportarea la descărcarea după fluaj a modelului Voigt-Kelvin –Hooke
0 1 2 3 40
2
4
6
8
10
4.908422exp t−( )
t

Popa Ion Florin, Marin Cornel, Filip Viviana
346
În figurile 5.56. a,b se prezintă schema bloc şi rezultatele obţinute folosind programul SIMULINK .
5.9.2 Simularea relaxării şi anulării deformaţiei după relaxare Dacă în urma unei încărcări cu tensiunea constantă σ0 pe durata t1 s-a produs
deformaţia ε1, pentru a se menţine constantă această deformaţie, tensiunea trebuie să scadă exponenţial. Într-adevăr, conform ecuaţiei diferenţiale (5.164) avem :
11111 ετE
NστN
Nσ =⋅+
+& (5.174)
Fig.5.56.b. Răspunsul modelului VKH la fluaj şi descărcarea după fluaj
Fig. 5.56.a. Schema bloc SIMULUNK pentru simularea fluajului şi descărcării după fluaj folosind modelul VKH

Modelarea şi simularea sistemelor mecatronice
347
Ecuaţia diferenţială (5.174) are soluţia de forma:
τtt
NN
CeεN
E)t(σ11
11
1
−+−
++
= (5.175)
în care constanta C se determină din condiţia la momentul iniţial:
11
001 1ε
NEσCσ)t(σ+
−=⇒= (5.176)
Înlocuind C se obţine expresia soluţiei pentru relaxare:
τtt
NN
eN
EσεN
E)t(σ11
101
111
−+−
⎟⎠⎞
⎜⎝⎛
+−+
+= (5.177)
Din expresia (5.177) se observă că relaxarea depinde de valoarea coeficientului N, a tensiunii iniţiale σ0 , a constantei E1 şi de timpul de întârziere τ.
Pentru E1=10, N=1, σ0=100, ε1=1, τ=1 şi t1=0 se obţine variaţia exponenţială din figura 5.57. La echilibru tensiunea tinde spre o valoare care reprezintă tensiunea corespunzătoare unei deformaţii ε1 pentru cele două elemente Hooke înseriate:
5121
212 =
+= ε
EEEEσ .
În figurile 5.58.a,b se prezintă schema bloc şi rezultatele obţinute folosind programul SIMULINK .
Fig. 5.57. Comportarea modelului VKH la relaxare
0 1 2 3 4 50
20
40
60
80
100
5 95exp 2− t( )+
t
5

Popa Ion Florin, Marin Cornel, Filip Viviana
348
Pentru anularea deformaţiei după relaxare, se aplică la momentul t2 o tensiune
constantă negativă -σ1 ( 21 σσ > ), astfel încât în primul moment se produce o revenire elastică instantanee (fig. 5.59):
2
12ΔEσε = (5.178)
Fig. 5.58.a. Schema bloc SIMULUNK pentru simularea relaxării
Fig. 5.58.b. Răspunsul la relaxare folosind modelul VKH

Modelarea şi simularea sistemelor mecatronice
349
Conform relaţiei (5.177) la momentul t2 tensiunea are valoarea:
τtt
NN
eεN
EσεN
Eσ121
11
011
1 11
−+−
⎟⎠⎞
⎜⎝⎛
+−+
+= (5.179)
Pe intervalul (t2, t3) când asupra elementului acţionează tensiunea negativă -σ1, soluţia generală la fluaj (5.167) se scrie:
( ) ( ) ⎟⎟
⎠
⎞
⎜⎜
⎝
⎛−+−=
−−
−−
τtt
τtt
eNEσCetε
2
1
12
11 (5.180)
în care constanta C se determină din deformaţia la momentul iniţial:
2
1112
2ΔEσεεε)t(ε −=−= (5.181)
Rezultă: 2
11
2EσεC −= (5.182)
Soluţia devine: ( ) ( ) ⎟⎟
⎠
⎞
⎜⎜
⎝
⎛−+−⎟⎟
⎠
⎞⎜⎜⎝
⎛−=
−−
−−
τtt
τtt
eNEσe
Eσεtε
2
1
12
2
11 112
(5.183)
Deformaţia se anulează şi apoi devine negativă ca în figura 5.59. Dacă la momentul t3 tensiunea negativă -σ1 se anulează, elementul suferă o revenire elastică cu
t
Fig. 5.59. Simularea anulării deformaţiei după relaxare
σ
t
ε1
σ0
Δε
-σ1
t1 t2
σ2
ε
Relaxare Anularea deformaţiei
Δε/2
σ1
t3

Popa Ion Florin, Marin Cornel, Filip Viviana
350
2
1ΔEσε = . Punând condiţia ( )
2
13 E
σtε −= în relaţia (5.183) se determină momentul t3 al
anulării tensiunii -σ1 . În figurile 5.48.a,b se prezintă schema bloc şi rezultatele obţinute folosind
programul SIMULINK .
Fig. 5.60.a. Schema bloc SIMULUNK pentru simularea descărcării după relaxare folosind modelul VKH
Fig. 5.60.b. Răspunsul la anularea deformaţiei după relaxare

Modelarea şi simularea sistemelor mecatronice
351
5.9.3. Simularea comportării la încărcarea armonică În cazul unei sarcini armonice de forma: ( ) tsint ωσσ 0= soluţia generală (5.166)
se scrie:
( ) [ ]⎥⎥⎦
⎤
⎢⎢⎣
⎡+++= ∫
−dttωcosNτωtωsin)N(e
Eτσεetε τ
tτt
11
00 (5.184)
Efectuând integrala din relaţia (5.184) se obţine soluţia de forma:
( ) ( )[ ]22
22
1
00 1
11ωτ
tωcosNτωtωsinωτNEσeεtε τ
t
+⋅−++
+=−
(5.185)
Pentru cazul particular: ε0=2; 101
0 =Eσ
; ω=10 ; N=1 (E1=E2) şi τ =1 soluţia
(5.185) devine: ( ) ( ) ( )1001
1010101002100 +−+
+= − tcostsin)(eεtε t (5.186)
În figura 5.61 s-au reprezentat atât diagrama de încărcare: )tsin()t( 10=σ cât şi diagrama răspunsului )t(ε .
Din aceste diagrame se observă că între încărcare şi răspunsul modelului există defazajul ϕ0 . Într-un regim staţionar (când termenul τ/teε −
0 devine neglijabil) defazajul ϕ0 se determină cu ajutorul relaţiei:
( )220 11Φ
ωτNτωtg++
−= (5.187)
Fig. 5.61. Simularea comportării modelului VKH
sub acţiunea unei sarcini armonice
f1 t( ) sin 10t( ):=
f2 t( ) 2exp t−( )10 2 100+( )sin 10t( ) 10 cos 10t( )⋅−[ ]
1 100++:=
0 1 2 3 415
10
5
0
5
10
15
f1 t( )
f2 t( )
t

Popa Ion Florin, Marin Cornel, Filip Viviana
352
În figurile 5.62.a,b se prezintă schema bloc şi rezultatele obţinute folosind
programul SIMULINK .
Fig. 5.62.a. Schema bloc SIMULUNK pentru simularea încărcării cu o sarcină armonică
Fig. 5.62.b. Răspunsul sistemului la încărcarea cu o sarcină armonică

Modelarea şi simularea sistemelor mecatronice
353
5.9.4 Simularea comportării la încărcarea cu impulsuri dreptunghiulare În cazul unor încărcări şi descărcări succesive de tip impuls dreptunghiular ca în
figura 5.63 se introduc coeficienţii de încărcare respectiv descărcare:
idi
i ,Tt ααα −=
Δ= 1 (5.188)
şi se notează : τμ /T= (5.189)
Pentru faza de încărcare cu +σ0 se consideră ε0=0 şi ţinând seama de relaţia
(5.169) se obţine deformaţia:
( )xNE
−+= 11
01
σε (5.190)
Se notează: xe iμα =− (5.191)
Relaţia (5.190) devine: ( )xNEσε −+= 1
1
01 (5.192)
La sfârşitul fazei de descărcare, ţinând seama de relaţia (5.173) şi de revenirea elastică cu 20 E/σε =Δ se obţine deformaţia:
( ) dμαeεεε −⋅−= Δ12 (5.193)
Dacă se notează : ye dμα =− (5.194) deformaţia la sfârşitul fazei de descărcare dată de relaţia (5.193) devine:
( )yxE
−= 11
02
σε (5.195)
Repetând raţionamentul pentru al doilea ciclu se obţine (fig.5.64): • la sfârşitul fazei a doua de încărcare:
( )[ ]yN)x(NE
−+−+= 111
03
σε (5.196)
+σ
Δti Δtd Δti Δtd
Fig.5.63. Schema încărcării cu impulsuri dreptunghiulare
σ
t
Δti

Popa Ion Florin, Marin Cornel, Filip Viviana
354
• la sfârşitul fazei a doua de descărcare:
( ) ( )[ ]2
1
04 11 yyNx
E++−=
σε (5.197)
• la sfârşitul fazei a treia de încărcare:
( )[ ]{ }2
1
05 11 yyN)x(N
E++−+=
σε
• la sfârşitul fazei a treia de descărcare:
( ) ( ) ( ){ }2
1
06 111 yyNNx
E++++−=
σε
În funcţie de valorile parametrilor N , x şi y se obţin diferite valori ale
deformaţiilor la sfârşitul fazelor de întindere compresiune. După un număr mare de cicluri, la limită, se obţin valori fixe pentru deformaţiile după faza de întindere respectiv de compresiune. 5.9.5. Simularea comportării la încărcarea cu un semnal
dreptunghiular alternant simetric În cazul încărcării cu un semnal dreptunghiular alternativ de amplitudine şi
perioadă constantă, având forma din figura 5.65, se notează:
t
Fig. 5.64. Simularea comportării la impulsuri dreptunghiulare
σ
t
ε1
σ0
Δε
t1 t2
ε
Δti
t3
ε0
Δtd Δti
t0
Δε

Modelarea şi simularea sistemelor mecatronice
355
τ
μααα T;T
tci =
Δ=== . (5.198)
La sfârşitul fazei de încărcare cu tensiunea +σ0 , dacă se consideră ε0=0 şi şi ţine seama de relaţia (5.169), se obţine deformaţia:
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−+=
−τit
eNEσε
Δ
1
01 1 (5.199)
Se notează: xe iμα =− (5.200)
Relaţia (5.199) devine: ( )xNEσε −+= 1
1
01 (5.201)
Pentru faza de compresiune se ţine seama de relaţia (5.167):
( ) ( ) ⎟⎟
⎠
⎞
⎜⎜
⎝
⎛−+−=
−−τt
τt
eNEσCetε 11
1
0 (5.202)
t
Fig. 5.65. Simularea comportării la impulsuri dreptunghiulare
σ
t
ε1
σ0
Δε
t1 t2
ε
Δti t3
Δtc Δti t0
2Δε
2Δε
ε2
2Δε

Popa Ion Florin, Marin Cornel, Filip Viviana
356
în care constanta C se determină din condiţia la momentul iniţial:
2
011
2Δ0Eσεεε)(ε −=−= (5.203)
Relaţia (5.202) pentru faza de compresiune devine:
( ) ( ) ⎟⎟
⎠
⎞
⎜⎜
⎝
⎛−+−⎟⎟
⎠
⎞⎜⎜⎝
⎛−=
−−τt
τt
eNEσe
Eσεtε 112
1
0
2
01 (5.204)
Deformaţia la sfârşitul acestei faze se scrie:
( )[ ]( )[ ]12
12
1
02
1
02
−−−=
−−−= −
NxxEσ
ε
NexEσε cμα
(5.205)
Repetând raţionamentul pentru al doilea ciclu se obţine (fig.5.51): • la sfârşitul fazei de încărcare:
( )[ ]122 2
1
03 ++−−= Nxxx
Eσε (5.206)
• la sfârşitul fazei de compresiune:
( )[ ]1222 23
1
04 −−+−−= Nxxxx
Eσε (5.207)
În funcţie de valorile parametrului x se obţin diferite valori ale deformaţiilor la sfârşitul fazelor de întindere compresiune. După un număr mare de cicluri, la limită, se obţin valori fixe pentru deformaţiile după faza de întindere respectiv de compresiune.
În figurile 5.66.a,b se prezintă schema bloc şi rezultatele obţinute folosind programul SIMULINK .
Fig. 5.66.a. Schema bloc SIMULUNK pentru simularea încărcării
modelului VKH cu un semnal dreptunghiular alternativ

Modelarea şi simularea sistemelor mecatronice
357
5.10. MODELUL VÂSCOELASTIC BURGERS Modelul vâscoelastic Burgers este un model folosit mai puţin decât modelul Zener
în modelarea şi simularea dinamicii sistemelor reologice, fiind format dintr-un element Voigt-Kelvin şi un element Maxwell legate în serie ca în figura 5.67.
Pentru a deduce ecuaţia diferenţială a modelui vâscoelastic Burgers se observă din figura 5.67 că tensiunea σ în cele două elemente Voigt-Kelvin şi Maxwell are aceeaşi valoare iar deformaţia totală ε este egală cu suma deformaţiilor elementelor:
Fig. 5.66.b. Rezultatul încărcării cu un semnal dreptunghiular alternativ
λ1
E1
Fig. 5.67. Modelul vâscoelastic Burgers
σ
ε E2 λ2

Popa Ion Florin, Marin Cornel, Filip Viviana
358
1111111
221221
1
11
1
11111
2
22
2
22221
221
ελεσσσσλσσεεεεεε
λσ
εσ
εεεε
λσ
εσ
εεεεε
σσσσ
&
&&&&&&&
&
&
+=⇒+=
++=⇒++=
====
==++=
===
EE
;E
;
;E
;
;
ck
ck
cc
kkck
cc
kkck
kc
(5.208)
Eliminând pe ε1 din cele două relaţii se obţine o ecuaţie diferenţială de ordinul al II lea cu coeficienţi constanţi neomogenă:
2
1
2
1
2
1
2
111 1
λσ
λλ
σλ
σελεE
EE
EE +⎟⎟
⎠
⎞⎜⎜⎝
⎛+++=+ &&&&&& (5.209)
Soluţia ecuaţiei (5.209) este de forma: ( ) ( ) ( )ttt pom εεε += (5.210)
în care: 1
1
21λεE
om eCC)t(−
+= este soluţia ecuaţiei omogene
( )tpε este o soluţie particulară a ecuaţiei diferenţiale
C1 şi C2 constante care se determină din condiţiile iniţiale ale funcţiei ( )tε
5.10.1 Simularea fluajului modelului Burgers Pentru cazul particular al unei sarcini constante de tip treaptă ( ) 0σσ =t soluţia
(5.210) devine:
( ) teCCttE
2
021
1
1
λσε λ ++=
− (5.211)
Constantele C1 şi C2 se determină din condiţia la momentul iniţial:
0002
0 == )(siE
)( εσε & (5.212)
Înlocuind în (5.211) rezultă constantele C1 şi C2 :
2
1
1
02
1
2
2
1
2
01 1
λλσ
λλσ
EC;
EE
EC =⎟⎟
⎠
⎞⎜⎜⎝
⎛−= (5.213)

Modelarea şi simularea sistemelor mecatronice
359
Înlocuind constantele C1 şi C2 în expresia (5.211) a soluţiei se obţine:
( ) teEE
ttE
2
0
2
1
1
0
2
0 1
1
1λσ
λλσσε λ +⎟
⎟
⎠
⎞
⎜⎜
⎝
⎛−−=
− (5.214)
Se obţine o curbă exponenţială care admite o asimptotă de ecuaţie:
( ) tEE
Ety
2
0
2
1
1
2
2
0 1λσ
λλσ
+⎟⎟⎠
⎞⎜⎜⎝
⎛−= (5.215)
Pentru cazul particular al valorilor parametrilor: 100 =σ , E1=10, E2 =5 , λ1=10, λ2=2 soluţia dată de relaţia (5.214) şi asimptota (5.215) au forma din figura 5.68.
După un timp t1 =2s se obţine o deformaţia:
67771 12
0
2
1
1
0
2
01
11
1
.teEE
tE
=+⎟⎟
⎠
⎞
⎜⎜
⎝
⎛−−=
−
λσ
λλσσε λ (5.216)
În figurile 5.69.a,b se prezintă schema bloc şi rezultatele obţinute folosind programul SIMULINK .
Fig. 5.68. Răspunsul la fluaj al modelului Burgers
f1 t( ) 2 5 1 exp t−( )−( )⋅− 5t+:= f2 t( ) 3− 5t+:=
0 0.5 1 1.5 2 2.50
2
4
6
8
10
f1 t( )
f2 t( )
t
f1 2( ) 7.677=

Popa Ion Florin, Marin Cornel, Filip Viviana
360
5.10.2 Simularea descărcării după fluaj a modelului Burgers În cazul descărcării după fluaj a modelului BURGERS, dacă după fluaj s-a obţinut
deformaţia 1ε , în cazul unei sarcini nule înlocuind în ecuaţia diferenţială (5.209 ) ( ) 0=tσ se obţine ecuaţia diferenţială de ordinul al doilea omogenă:
011 =+ Eελε &&& (5.217)
avînd soluţia de forma:
( )tE
eCCt 1
1
21λε
−+= (5.218)
Fig.5.69.a. Schema bloc SIMULINK pentru fluajul modelului Burgers
Fig.5.69.b. Rezultatul simulării fluajului pentru modelul Burgers

Modelarea şi simularea sistemelor mecatronice
361
Constantele C1 şi C2 se determină din condiţia la momentul iniţial:
2
010
λσεεε =∞= )(si)( (5.219)
Rezultă:
2
012
2
01 λ
σελσ
−== C;C (5.220)
Înlocuind Constantele C1 şi C2 în soluţia (5.218) se obţine:
( )tEtE
eet 1
1
1
1
12
0 1 λλ ελσε
−−+⎟
⎟
⎠
⎞
⎜⎜
⎝
⎛−= (5.221)
Pentru cazul particular 100 =σ , E1=10, E2 =5 , λ1=10, λ2=2 soluţia dată de relaţia (5.221) are forma din figura 5.70.
În figurile 5.71.a,b se prezintă schema bloc şi rezultatele obţinute folosind programul SIMULINK .
Fig. 5.70. Răspunsul la descărcarea după fluaj al modelului Burgers
x
f1 t( ) 5 1 exp t−( )−( ) 7.677exp t−( )+:= f2 t( ) 5:=
0 1 2 3 4 50
2
4
6
8
10
f1 t( )
f2 t( )

Popa Ion Florin, Marin Cornel, Filip Viviana
362
Fig.5.71.a. Schema bloc SIMULINK pentru descărcarea după fluaj a modelului Burgers
Fig.5.71.b. Rezultatul simulării descărcării după fluajul modelului Burgers

Modelarea şi simularea sistemelor mecatronice
363
5.10.3 Simularea relaxării modelului Burgers Dacă în modelul Burgers s-a produs deformaţia remanentă ε1 şi dacă se menţine
constantă această deformaţie ( )00 == εε &&& , , atunci tensiunea scade exponenţial conform ecuaţiei (5.209) care devine:
012
1
2
1
2
1
2
1 =+⎟⎟⎠
⎞⎜⎜⎝
⎛+++
λσ
λλσλσ E
EE
E&&& (5.222)
Ecuaţia diferenţială (137) are soluţia de forma: trtr eCeC)t( 21
21−− +=σ (5.223)
în care: r1 şi r2 sunt rădăcinile ecuaţiei caracteristice:
012
1
2
1
2
1
2
12 =+⎟⎟⎠
⎞⎜⎜⎝
⎛+++
λλλλ E
EEr
Er (5.224)
C1 şi C2 constante care se determină din condiţiile iniţiale:
0000
2211
0210
=−−⇒==+⇒=
CrCr)(CC)(
σσσσ
& (5.225)
Rezultă soluţia de forma: ( )trtr ererrr
)t( 2112
12
0 −− −−
=σσ (5.226)
Pentru cazul particular 100 =σ , E1=10, E2 =5 , λ1=10, λ2=2 este de forma:
( ) ( ) ( ) ( )[ ]t.t. e.e.)t( 65026502 650265026
10 +−−− −−−+−=σ (5.223)
si este reprezentată în figura 5.72.
f1 t( ) 102− 0.5 6+( )exp 2− 0.5 6−( )t⎡⎣ ⎤⎦ 2− 0.5 6−( )exp 2− 0.5 6+( )t⎡⎣ ⎤⎦−
6:=
0 2 4 6 8 100
2
4
6
8
10
f1 t( )
tFig. 5.72. Răspunsul la relaxarea modelului Burgers

Popa Ion Florin, Marin Cornel, Filip Viviana
364
În figurile 5.73.a,b se prezintă schema bloc şi rezultatele obţinute folosind programul SIMULINK .
Fig.5.73.a. Schema bloc SIMULINK pentru relaxarea modelului Burgers
Fig. 5.73.b. Rezultatul simulării relaxării modelului Burgers

Modelarea şi simularea sistemelor mecatronice
365
5. 11. CONCLUZII
Din analiza rezultatelor obţinute pentru modelele Voigt Kelvin, Maxwell, Zener, Voigt- Kelvin- Hooke şi Burgers se pot trage următoarele concluzii:
1. Comportarea la fluaj şi la descărcarea după fluaj a modelului Voigt Kelvin nu indică deformaţii elastice instantanee care apar la cele mai multe materiale supuse la fluaj dar indică o variaţie asimptotică spre o valoare de echilibru egală cu deformaţia elementului Hooke sub acţiunea sarcinii σ0. Comportarea la relaxare a modelului Voigt Kelvin arată că aceasta se produce sub acţiunea unei sacini constante şi nu sub o sarcină ce scade asimptotic cum este cazul celor mai multe experienţe de relaxare pe materiale reale. Comportarea la acţiunea unor sarcini armonice arată un defazaj şi concordă cu experimentul pe materiale vâscoelastice reale, iar rezultatul la acţiunea unor sarcini periodice cum ar fi impulsurile dreptunghiulare sau semnalul alternativ dreptunghiular arată un comportament staţionar de creştere şi descreştere exponenţială care a fost verificat prin descompunerea lui în armonice sau prin scrierea semnalului sub forma unor serii. Rezultatele obţinute prin cele trei metode sunt în concordanţă cu experimentul real. Simularea comportării modelului la experienţele de mai sus s-a făcut şi cu ajutorul unui mediu de calcul şi simulare avansat MATLAB SIMULINK, rezultatele obţinute fiind de asemenea în concordanţă cu cele obţinute analitic şi numeric prin metodele prezentate sau cu rezultatele experimentale. În consecintă modelul Voigt Kelvin poate fi folosit cu aproximaţie pentru descrierea comportării la fluaj şi relaxare a unui mediu continuu vâscoelastic;
2. Comportarea la fluaj şi la descărcarea după fluaj a modelului Maxwell nu indică deformaţii elastice instantanee care apar la cele mai multe materiale supuse la fluaj şi nici variaţia asimptotică spre o valoare de echilibru sub acţiunea sarcinii σ0. Comportarea la relaxare a modelului Maxwell arată că aceasta se produce sub acţiunea unei sacini ce scade asimptotic cum este cazul celor mai multe experienţe de relaxare pe materiale reale. Comportarea la acţiunea unor sarcini armonice arată un defazaj şi concordă cu experimentul pe materiale vâscoelastice reale, iar rezultatul la acţiunea unor sarcini periodice cum ar fi impulsurile dreptunghiulare arată un comportament nestaţionar de creştere liniară intermitentă în timp ce pentru un semnal alternativ dreptunghiular arată un comportament staţionar de creştere şi descreştere liniară intermitentă. Simularea comportării modelului la experienţele de mai sus s-a făcut şi cu ajutorul mediului MATLAB SIMULINK, rezultatele obţinute fiind de asemenea în concordanţă cu cele obţinute analitic şi numeric prin metodele prezentate. În consecintă modelul Maxwell poate fi folosit cu aproximaţie pentru descrierea comportării la fluaj şi relaxare a unui mediu continuu vâscoelastic pentru anumite tipuri de încărcare;
3. Comportarea la fluaj şi la descărcarea după fluaj a modelului Zener indică atât deformaţii elastice instantanee cât şi o variaţie asimptotică spre o valoare de echilibru egală cu deformaţia celor două elemente Hooke legate în paralel, sub acţiunea sarcinii

Popa Ion Florin, Marin Cornel, Filip Viviana
366
σ0 care apar la cele mai multe materiale supuse la fluaj. Comportarea la relaxare a modelului Zener arată că aceasta se produce sub acţiunea unei sacini ce scade asimptotic aşa cum este cazul celor mai multe experienţe de relaxare pe materiale reale. Comportarea la acţiunea unor sarcini armonice arată un defazaj şi concordă cu experimentul pe materiale vâscoelastice reale, iar rezultatul la acţiunea unor sarcini periodice cum ar fi impulsurile dreptunghiulare sau semnalul alternativ dreptunghiular arată un comportament staţionar de creştere şi descreştere exponenţială. Simularea comportării modelului la experienţele de mai sus s-a făcut şi cu ajutorul mediului MATLAB SIMULINK, rezultatele obţinute fiind în concordanţă cu cele obţinute analitic şi cu rezultatele experimentale. În consecintă modelul Zener poate fi folosit cu suficientă precizie pentru descrierea comportării la fluaj şi relaxare a unui mediu continuu vâscoelastic;
4. Comportarea la fluaj şi la descărcarea după fluaj a modelului Voigt-Kelvin Hooke indică atât deformaţii elastice instantanee cât şi o variaţie asimptotică spre o valoare de echilibru egală cu deformaţia celor două elemente Hooke legate în serie sub acţiunea sarcinii σ0 care apar la cele mai multe materiale supuse la fluaj. Comportarea la relaxare a modelului Voigt-Kelvin Hooke arată că aceasta se produce sub acţiunea unei sacini ce scade asimptotic aşa cum este cazul celor mai multe experienţe de relaxare pe materiale reale. Comportarea la acţiunea unor sarcini armonice arată un defazaj şi concordă cu experimentul pe materiale vâscoelastice reale, iar rezultatul la acţiunea unor sarcini periodice cum ar fi impulsurile dreptunghiulare sau semnalul alternativ dreptunghiular arată un comportament staţionar de creştere şi descreştere exponenţială. Simularea comportării modelului la experienţele de mai sus s-a făcut şi cu ajutorul mediului MATLAB SIMULINK, rezultatele obţinute fiind în concordanţă cu cele obţinute analitic şi cu rezultatele experimentale. În consecintă modelul Voigt-Kelvin Hooke poate fi folosit cu suficientă precizie pentru descrierea comportării la fluaj şi relaxare a unui mediu continuu vâscoelastic;
5. Comportarea la fluaj şi la descărcarea după fluaj a modelului Burgers indică deformaţii elastice instantanee care apar la cele mai multe materiale supuse la fluaj şi o variaţie asimptotică asemenea modelului Maxwell. Comportarea la relaxare a modelului Burgers arată că aceasta se produce sub acţiunea unei sacini ce scade asimptotic sprre zero aşa cum este cazul celor mai multe experienţe de relaxare pe materiale reale. Simularea comportării modelului la experienţele de mai sus s-a făcut şi cu ajutorul mediului MATLAB SIMULINK, rezultatele obţinute fiind în concordanţă cu cele obţinute analitic şi cu rezultatele experimentale. În consecintă modelul Zener poate fi folosit pentru fluaj şi relaxare .

Modelarea şi simularea proceselor si sistemelor
6

Modelarea şi simularea sistemelor mecatronice
369
6.1. INTRODUCERE
ÎN MODELAREA SISTEMELOR
6.1.1. Conceptul de sistem. Definiţii Integrarea obiectelor şi fenomenelor reale aflate într-o continuă transformare şi interacţiune cu mediul din care fac parte, a condus la introducerea conceptului de sistem care permite o analiză a evoluţiei stărilor lor precum şi predicţia stărilor ulterioare folosind metode ştiinţifice pe baza datelor obţinute şi a unor modele matematice. O primă definiţie a conceptului de sistem a fost dată de Aristotel încă din antichitate: ”întregul este mai mult decât suma părţilor componente”.Alte definiţii ale conceptului de sistem au fost prezentate în ultimul timp astfel:
Gerard (1940): „sistemul reprezintă o unitate organizatorică formată din mai multe unităţi mai mici (subsisteme);
Ashby (1947): „sistemul este o parte a unui întreg”; Shannon (1948): „sistemul este caracteriat printr-un flux de informaţii a cărui
intensitate este expresia ordinii şi organizării interne”; Bertalanffy (1950): ”un ansamblu de elemente aflate în interacţiune, în vederea
realizării unui obiectiv comun prin utilizarea unui ansamblu de resurse materiale, informaţionale, energetice şi umane”;
Zadeh (1969): „sistemul reprezintă o structură cu o mulţime de perechi de intrare ieşire”;
Nicolov (1973): „sistemul este acea mulţime de elemente în cadrul căreia se desfăşoară procesul de conducere”;
Setov (1974): „sistemul reprezintă o unitate organizatorică între elementele căreia există un număr de legături care contribuie la funcţionarea şi conservarea sistemului”;
Onicescu (1979): „sistemul este caracterizat printr-o energie informaţională a cărei expresie depinde de probabilitatea de apariţie a evenimentelor care îl caracterizează”;
Pentru a putea fi integrate în sistem componentele trebuiesc interconectate sau create legăturile necesare pentru atingerea obiectivului sistemului. Mai multe componente se pot organiza în subsisteme care la rândul lor pot interacţiona între ele.

Popa Ion Florin, Marin Cornel, Filip Viviana
370
6.1.2. Principiile analizei sistemelor
Dinamica sistemelor ilustrează modul în care se modifică stările lor succesive sub acţiunea unor factori externi sau interni, mod care depinde de structura lor internă. Se spune că un sistem îşi păstrează identitatea sau se conservă, dacă nu îşi modifică structura internă, ceea ce face ca el să răspundă totdeauna în acelaşi mod la acţiunea aceloraşi factori externi sau pentru aceleaşi date de intrare sau perturbaţii (prezintă o singură dinamică). Principiile analizei sistemelor au la bază păstrarea identităţii lor şi sunt următoarele: 1. principiul existenţei unui subsistem de coordonare (Mesarovic -1970) arată că
totdeauna există un subsistem de coordonare care are rolul de a rezolva conflictele şi contradicţiile care pot apărea între diferite subsisteme datorită celor două moduri de operare cu decizii: modul centralizat şi modul descentralizat la nivel de subsistem sau componentă;
2. principiul incompatibilităţii subsistemelor (Zadeh -1974) se aplică unui sistem complex având un model de reprezentare foarte riguros, arată că un astfel de model nu poate descrie toate legăturile existente între subsistemele sale nu este un model exhaustiv şi în anumite condiţii legăturile între componente sau subsisteme devin incompatibile;
3. principiul optimalităţii sistemelor (Stănciulescu -1982) se aplică de asemnea unui sistem complex, stabileşte că un sistem poate fi optimal, chiar dacă unul din subsistemele sale nu este optimal în relaţiile sale cu celelalte subsisteme sau altfel spus unul dintre subsisteme sale îşi poate sacrifica optimalitatea pe care ar fi avut-o dacă ar fi acţionat separat, pentru a asigura optimalitatea sistemului;
4. principiul incertitudinii subsistemelor (Stănciulescu -1982) stabileşte că starea unui subsistem şi interacţiunea sa cu celelate subsisteme nu pot fi simultan determinate decât cu un anumit grad de acurateţe. Acest principiu arată că întotdeauna există o diferenţă între modelul analizat şi sistemul real.
6.1.3. Tipuri de sisteme Analiza unui sistem nu se poate realiza prin izolarea completă de mediul din care face parte, deoarece acest sistem este la rândul său un subsistem al unui sistem complex. Pentru analiza lor se utilizează o tehnică de abstractizare a legăturilor cu mediul prin izolarea lor şi introducerea legăturilor corespunzătoare numită axioma legăturilor. În practică se întâlnesc următoarele tipuri de modele: a. Modelul sistemului deschis este cel mai simplu, întrucât realizează o legătură între intrările u şi ieşirile y prin intermediul operatorului de sistem A (fig.6.1.1). Dacă operatorul A este un operator matriceal şi se notează cu u vectorul intrărilor şi cu y vectorul ieşirilor, atunci este valabilă relaţia:
uAy = (1)

Modelarea şi simularea sistemelor mecatronice
371
b. Sistemul închis cu buclă de reglare sau sistemul cibernetic este un sistem care conţine un bloc de reglare R având rolul de a compara tot timpul ieşirea efectivă y cu o mărime de referinţă yR numită mărime scop sau obiectiv (fig.6.1.2). În cazul în care există o diferenţă dintre cele două mărimi y şi yR, blocul de reglare R transmite un semnal Δu care modifică intrarea u:
Ryu =Δ (2)
În acest caz relaţia (1) se scrie: RyAuuuAy +=+= )Δ( (3)
Din relaţia (3) rezultă următoarea relaţie dintre vectorul ieşirilor y şi vectorul intrărilor u numită relaţia reglării:
uAAREy ])[( 1−−= (4)
Sistemele cibernetice au capacitatea de a-şi păstra stabilitatea dinamică în scopul atingerii obiectivului stabilit, prin contracararea factorilor perturbatori care acţionează asupra lor. Această proprietate a sistemelor cibernetice se numeşte proprietate de autoreglare, iar autoreglarea se realizează prin bucla de reacţie sau bucla de feed-back. În general se realizează autoreglarea sistemului atunci cînd are loc creştere a nivelului variabilei de stare a sistemului sau a valorii realizate y faţă de mărimea obiectiv yR În acest caz este nevoie de o corecţie negativă a mărimii de intrare u:
0<Δu (5) Se spune că reacţia este negativă şi sistemul are un comportament predictibil sau controlabil.
A u y
Fig.6.1.6.1. Sistem d hi
A u y
Fig.6.1.2. Sistemul închis cu buclă de reglare
R
Δu

Popa Ion Florin, Marin Cornel, Filip Viviana
372
Există şi situaţii (de excepţie) când autoreglarea sistemului se realizează şi atunci cînd are loc o scădere a nivelului variabilei de stare a sistemului sau a valorii realizate y faţă de mărimea obiectiv yR. În acest caz este nevoie de o corecţie pozitivă a mărimii de intrare u:
0>Δu (6) Se spune că reacţia este pozitivă şi sistemul are un comportament nepredictibil sau necontrolabil.
c. Sisteme cu buclă de reacţie anticipativă sau cu buclă feed-before. Sunt sisteme cu buclă de reacţie care conţin suplimentar un bloc de monitorizare-predicţie P care are rolul de a anticipa mărimea de ieşire şi de a micşora diferenţa dintre aceasta şi mărimea obiectiv, cu ajutorul unui bloc de monitorizare–predicţie sau de analiză a tendinţei de evoluţie a valorilor de ieşire (fig.6.1.3).
Blocul de monitorizare-predicţie anticipează valoarea de ieşire *iy 1+ la momentul
ti+1 în funcţie de evoluţia anterioară a sistemului, adică în funcţie de valoarea yi monitorizată la momentul ti:
i*i yPy =+1 (7)
Valoarea de reglare Δu se determină în funţie de yi astfel:
*iyRu 1+=Δ (8)
Sistemele moderne cu buclă feed-before conţin un regulator R şi un comparator P care monitorizează şi compară atât diferenţele dintre valorile de ieşire succesive cât şi diferenţele dintre valorile de ieşire şi valoarea standard ceea ce conduce la convergenţa rapidă a valorilor de ieşire spre valoarea de referinţă.
A u y
Fig. 6.1.3. Sisteme cu buclă de reacţie anticipativă
R
Δu
P y*i+1
yi

Modelarea şi simularea sistemelor mecatronice
373
6.1.4. Proprietăţi generale ale sistemelor
Analiza unui sistem în fazele de investigare, modelare şi simulare necesită cunoaşterea proprietăţilor specifice care pot fi grupate în: proprietăţi externe şi interne. a. Proprietăţi externe Proprietăţile externe ale unui sistem caracterizează relaţiile lui cu mediul în care se află: a. dinamicitatea – proprietatea de a reacţiona la modificările care au loc în afara
sistemului, timpul de reacţie fiind o caracteristică importantă privind dinamica sistemului, un invariant în raport cu natura proceselor, a fenomenelor şi conexiunilor interne şi externe ce caracterizează sistemul;
b. deschiderea – proprietatea de interacţiune dintre sistem şi mediul său, fiind dată de existenţa intrărilor şi ieşirilor sistemului. Un sistem fără intrări şi ieşiri nu posedă această proprietate şi este considerat un sistem izolat sau închis;
c. complexitatea – proprietatea sistemului care depinde de structura sa internă, de tipul şi numărul de elemente sau subsisteme, de legăturile dintre acestea; această proprietate depinde totodată în mod subiectiv de raportarea analistului la sistemul analizat;
d. caracterul aleator sau stohastic – este specific sistemelor ale căror intrări, ieşiri şi procese interne respectă legi de distribuţie stohastice (Poisson, Gamma, normale, etc);
e. autoreglarea - este specifică sistemelor cibernetice şi exprimă capacitatea lor de a reacţiona la perturbaţii exterioare sau interioare. Astfel de sisteme au în componenţa lor cel puţin o buclă de reglare;
f. caracterul informaţional - decizional - este specific sistemelor cibernetice unde informaţia este elementul de bază al procesului de conducere. La aceste sisteme procesul decizional cuprinde o succesiune standard de cicluri de proceduri de decizie-acţiune-efect;
g. caracterul antientropic - este specific sistemelor cibernetice unde entropia sade ca urmare a reducerii gradului de dezorganizare internă prin ameliorarea proprietăţilor structurale, informaţional-decizionale şi a schimbului de informaţii cu mediul exterior. b. Proprietăţi interne Proprietăţile interne depind de structura sistemului şi de natura interrelaţiilor şi
intercondiţionărilor dintre subsistemele componente: a. accesibilitatea – proprietatea ca o nouă stare xk a sistemului corespunzătoare unei
comenzi uk(τ) să depindă atât de starea iniţială x0 corespunzătoare unei comenzi u0(t0) cât şi de intervalul de timp (t0,τ) corespunzător trecerii de la starea iniţială la noua stare;

Popa Ion Florin, Marin Cornel, Filip Viviana
374
b. detectabilitatea – proprietatea sistemului ca pentru starea de control xic să se obţină o singură ieşire yi;
c. observabilitatea – proprietatea prin care succesiunea stărilor sistemului se deduce pe baza mărimilor de intrare şi de ieşire. Acest lucru este posibil prin folosirea modelelor de simulare şi prin măsurarea nivelului real al parametrilor care caracterizează succesiunea stărilor;
d. controlabilitatea sistemului şi a stărilor - proprietatea prin care se poate genera o nouă stare a sistemului pentru momentul următor pe baza stării la momentul iniţial şi a intrărilor din sistem. Un sistem este controlabil global dacă pentru fiecare clasă de funcţii de intrare există o singură ieşire. Un sistem este parţial controlabil dacă sunt posibile mai multe ieşiri pentru o clasă de funcţii de intrare;
e. sensibilitatea – proprietatea pe care o are sistemul de a răspunde sau nu la anumite nivele de modificare ale intrărilor;
f. stabilitatea - proprietatea pe care o au sistemele de a reveni la starea iniţială atunci când nivelele intrărilor revin la valorile iniţiale, sau după ce s-a înlăturat cauza care a produs modificarea stării iniţiale a sistemului; sistemul este stabil atunci când la variaţii mari ale mărimilor de intrare corespund variaţii mici ale mărimilor de ieşire şi sistemul este instabil în celălalt caz;
g. adaptabilitatea - proprietatea sistemelor de a răspunde prin anumite valori ale ieşirilor atunci când intrările se află între anumite valori. Sistemele care au această proprietate prin structura lor internă se numesc sisteme autoadaptive;
h. compozabilitatea şi decompozabilitatea - proprietatea prin care un sistem se poate compune sau descompune din sau într-un număr finit de subsisteme, respectiv de elemente componente;
i. structurabilitatea - proprietatea sistemului de a se deosebi de alte sisteme printr-o anumită structură specifică pe care o posedă şi de a-şi conserva în timp această structură;
j. finitudinea - proprietatea sistemelor de a avea un număr limitat de intrări, ieşiri şi stări.
6.1.5. Tipologii structurale şi funcţionale În vederea definirii şi clasificării sistemelor trebuiesc identificate atât componentele sau subsistemele cât şi procesele, stările care le caracterizează şi natura mediului cu care acestea interacţionează. Sistemele se pot clasifica în funcţie de următoarele criterii: a. din punct de vedere al caracterului activităţilor: sisteme deterministe (care
operează după legi bine precizate) comportarea lor putând fi previzionată, diagnosticate sau corectate dacă starea curentă şi caracteristicile operaţionale sunt precis cunoscute şi sisteme probabilistice sau stohastice (care operează după reguli probabilistice) comportamentul lor neputând fi previzionat datorită existenţei unor perturbaţii interne sau externe;

Modelarea şi simularea sistemelor mecatronice
375
b. din punct de vedere al relaţiei dintre structura şi comportamentul sistemului: sisteme cu structură deschisă (ale căror ieşiri sunt funcţie atât de intrările din unele subsisteme cât şi de perturbaţiile externe, vezi figura 6.1.4) şi sisteme cu structură închisă (ale căror ieşiri sunt funcţie atât de intrările din unele subsisteme, de perturbaţiile externe, cât şi de valorile ieşirilor prin intermediul unei buclă de reeacţie sau feed back, vezi figura 6.1.5).
Sistemele automate sunt un caz particular al sistemelor cu structură închisă în care mărimea de intrare este identică cu cea de ieşire (fig.6.1.6); c. din punct de vedere al proprietăţilor de adaptabilitate la mediu sunt sisteme
neadaptive (convenţionale) şi sisteme adaptive (neconvenţionale). Sistemele adaptive sunt sisteme închise care au în componenţa lor un subsistem S1 având ca intrări vectorul u, perturbaţiile exterioare p1 şi vectorul de adaptare A furnizat de un subsistem de adaptare SA care are o funcţie asemănătoare cu cea a unui bloc de reglare având ca intrări vectorul de ieşire y, vectorul criteriilor de adaptare c şi vectorul perturbaţiilor exterioare p2 (fig. 6.1.7).
S2u y
Fig. 6.1.4. Sistem deschis
S1
p
d
SRΔu
Fig. 6.1.5. Sistem înschis
S2u y
S1
p1
d
p2
y
Fig. 6.1.6. Sistem automat
S2y
S1
p d

Popa Ion Florin, Marin Cornel, Filip Viviana
376
d. din punct de vedere al corelaţiilor dintre subsistemele componente se deosebesc:
sisteme de distribuţie (alcătuite din subsisteme cu funcţionalităţi distincte, cu obiective proprii şi precise, care urmăresc realizarea unui obiectiv global)şi sisteme concentrate (sisteme alcătuite din subsisteme cu funcţionalităţi identice sau complementare, care urmăresc realizarea unui obiectiv global).
e. din punct de vedere al tipurilor de conexiuni: sisteme cu conexiuni intercative (care se menţin stabile păstrându-şi direcţionalitatea la apariţia sau dispariţia unor perturbaţii), sisteme cu conexiuni de generare (care conţin subsisteme având un caracter temporar şi care interacţionează în scopul realizării obiectivului), sisteme cu conexiuni funcţionale (sisteme conţinând subsisteme având un caracter informaţional a căror funcţionalitate este legată în principal de realizarea funcţiilor sistemului), sisteme cu conexiuni de transformare (care au rolul de aducere a unor subsisteme în starea iniţială sau finală), sisteme cu conexiuni decizionale (care rezultă din combinaţia conexiunilor de funcţionare şi a celor de transformare pe baza unor modele de conducere sau decizie). Pe baza acestor conexiuni se diferenţiază:
1. Sisteme cu structură ierarhică arborescentă organizate pe mai multe niveluri ierarhice (fig.6.1.8);
2. sisteme cu structură de tip reţea (neierarhică) în care nu se pot pune în evidenţă niveluri ierarhice (fig.6.1.9);
3. sisteme cu structură mixtă, sunt sisteme cu structură ierarhică având subsisteme pe diferite niveluri organizate în reţea (fig.6.1.10).
SAA
Fig. 6.1.7. Sistem adaptiv cu structură
u yS1
p1
p2 c

Modelarea şi simularea sistemelor mecatronice
377
6.1.6. Tipuri de arhitecturi ale sistemelor Modul în care sunt interconectate sau integrate subsistemele pentru a realiza funcţionalitatea şi a răspunde cerinţelor de mediu pentru atingerea obiectivului propus defineşte arhitectura unui sistem. În funcţie de arhitectura lor sistemele se pot grupa în : a. sisteme cu arhitectură simplă (buclă primară) caracterizate de existenţa unor transferuri elementare între sistem şi mediu (relaţii energetice de tip acţiune-reacţie ca în figura 6.1.11). Specific acestor sisteme este funcţionarea după programe prestabilite, ceea ce face ca adaptabilitatea lor este foarte scăzută;
Fig. 6.1.8. Sistem cu structură ierarhică arborescentă
S1
S2
S3 S’3
S’2 S”2
S”3
Fig. 6.1.9. Sistem cu structură neierarhică de tip reţea
S1 S2 S3
S5 S4
Fig. 6.1.10. Sistem cu structură mixtă
S1
S31 S32 S33
S35 S34
S21 S22
S24S23
S4 S5 S6

Popa Ion Florin, Marin Cornel, Filip Viviana
378
b. sisteme cu structură cibernetică (cu buclă de reacţie sau buclă secundară) conţine în afara buclei primare şi o buclă secundară de reacţie ce realizează conexiunea inversă sau feed-back-ul (fig.6.1.12). În afara fluxurilor energetice şi informaţionale din bucla primară aceste sisteme conţin şi fluxuri informaţionale şi decizionale din bucla de control. Blocul de achiziţie şi de prelucrare a datelor sesizează schimbările de funcţionalitate şi de mediu şi transmite informaţii sub formă de semnale către blocul de control şi de comandă, care le transformă în decizii sau comenzi pentru sistemul de execuţie. Pentru o funcţionare corectă a unui asemenea sistem este necesar ca blocul de achiziţie să sesizeze la momentul oportun schimbările de funcţionalitate şi de mediu care pot apărea, să le transmită în timp util către blocul de control şi comandă şi acesta din urmă să selecteze decizia cea mai potrivită pentru a corecta funcţionarea sistemului.
Fig.6.1.16.1. Sistem cu arhitectură simplă
ACŢIUNE
MEDIU INTERPRETREAZĂ
ACŢIUNEA
SISTEM EXECUTĂ ACŢIUNEA
REACŢIE
Fig. 6.1.12. Sistem cu arhitectură cibernetică
MEDIU INTERPRETREAZĂ
ACŢIUNEA
SISTEM EXECUTA ACŢIUNILE ŞI
DECIZIILE
buclă primară
Buclă secundară
BLOC DE ACHIZIŢIE ŞI PRELUCRARE DATE
INFORMAŢII DATE
BLOC DE CONTROL ŞI DE COMANDĂ
(PROCES DECIZIONAL)
INFORMAŢII SEMNALE
DECIZII COMENZI

Modelarea şi simularea sistemelor mecatronice
379
c. sisteme cu arhitectură cibernetică şi învăţare (fig.6.1.13) sunt mai complexe decât sistemele cibernetice, conţinând o buclă terţiară formată dintr-un bloc pentru măsurarea şi stocarea politicilor anterior folosite în care, în funcţie de rezultatele obţinute din executarea deciziilor şi comenzilor de la blocul de comandă şi control, sunt selectate acele decizii care au avut rezultetele cele mai bune, în scopul păstrării şi aplicării acestora în viitor. Schimbarea politicilor învăţate se poate face pe măsura acumulării de noi experienţe şi cunoştinţe în domeniu, deci învăţarea este continuă şi interactivă. d. sisteme cu structuri stratificate (fig.6.1.14) sunt sisteme cu structură cibernetică cu învăţare la care se adaugă difereite niveluri suplimentare de control, cum ar fi de exemplu o buclă de planificare şi evaluare a rezultatelor sistemului. Bucla suplimentară de control planifică şi evaluează funcţiile şi rezultatele obţinute. Un caz particular al sistemelor cu structuri stratificate o reprezintă sistemele expert.
Fig. 6.1.13. Sistem cu arhitectură cibernetică şi învăţare
MEDIU INTERPRETREAZĂ
ACŢIUNEA
SISTEM EXECUTA ACŢIUNILE
ŞI DECIZIILE
buclă primară
Buclă secundară
BLOC DE ACHIZIŢIE PRELUCRARE DATE
INFORMAŢII DATE
BLOC CONTROL PROCES DECIZIONAL
INFORMAŢII SEMNALE
DECIZII COMENZI
Buclă terţiară
BLOC DE POLITICI
ANTERIOARE FOLOSITE
REZULTATE
POLITICA SELECTATĂ
Fig. 6.1.14. Sistem cu arhitectură stratificatră
MEDIU INTERPRETREAZ
Ă
SISTEM EXECUTA
ACŢIUNILE ŞI DECIZIILE
BUCLĂ PRIMARĂ
BUCLA CONTROL/
DECIZII
BLOC DE ACHIZIŢIE 1
BLOC DECIZIONAL 1
BUCLA POLITICI
BUCLA PLANIFICARE/
EVALUARE
BLOC DECIZIONAL 2
BLOC DECIZIONAL 3
BLOC DE ACHIZIŢIE 2
BLOC DE ACHIZIŢIE 3

Popa Ion Florin, Marin Cornel, Filip Viviana
380
6.2. SIMULAREA PROCESELOR 6.2.1. Definiţii ale simulării Simularea este un concept nou care a apărut odată cu revoluţia informaţiei şi al apariţiei unor programe de analiză create special pentru simularea unor procese reale. Din punct de vedere etimologic, termenului de simulare provine din limba latină, cuvântul simulatio înseamnă reproducerea, reprezentarea sau imitarea unui fenomen sau obiect real. La baza proceselor de simulare stau modelele de analiză a unor sisteme reale existente ori în curs de realizare, aflate în faza de proiectare. Simularea reprezintă în esenţă manipularea unor modele care reprezintă fenomenul studiat. Primele simulări s-au făcut prin anii 1940-1944 de către J. von Neumann şi S. Ulam în cadrul laboratorului de fizică, în cadrul cercetărilor de fizică nucleară efectuate în această perioadă de către SUA. O definiţie cuprinzătoare (dar nu exhaustivă) a procesului simulării cuprinde mai multe aspecte: - o analogie cu sistemul sau fenomenul real pe baza unei reprezentări matematice
simplificate care ţine seama de proprietăţile esenţiale ale sistemului real, reprezentare numită model de simulare;
- o reprezentare dinamică a desfăşurării procesului real cu ajutorul unui model matematic abstract care este supus acţiunii unor stimuli externi ce se pot modifica în timp, în scopul descoperirii modului în care sistemul reacţionează la aceşti stimuli, sau modul în care procesul respectiv se desfăşoară în timp;
- o metodă de cercetare a procesului sau sistemului pe baza rezultatelor experimetale obţinute pe sistemul real în scopul construirii unui model a cărui comportare să fie cât mai apropiată de comportarea sistemului real (o metodă de validare a modelului);
- tehnici de construire a modelului de simulare folosind anumite reprezentări matematice, fizice, info-grafice, etc. a unui sistem sau fenomen real, cu ajutorul unor programe speciale de simulare pentru studiul comportamentului său la anumiţi factori sau stimuli exteriori;
- tehnici de testare, evaluare şi manipulare a unui sistem fără a se acţiona direct asupra lui, ci indirect asupra modelului de simulare;
- tehnici numerice pentru conducerea experimentelor, pe baza unor construcţii matematice sau logice (algoritmul programului de calcul aferent) creat pe baza sistemului real pentru a descrie comportarea lui în alte condiţii de solicitare;
- tehnici de studiu al comportamentului unui sistem real fără a acţiona direct asupra lui ci asupra modelului pe baza unor analogii fizice, chimice, matematice sau criterii de similitudine.

Modelarea şi simularea sistemelor mecatronice
381
În 1976 Lucas a dat următoarea definiţie pragmatică a procesului simulării bazată pe posibilitatea utilizării tehnicii de calcul: simularea este o tehnică de realizare a experimentelor cu ajutorul calculatorului electronic care implică utilizarea unor modele matematice sau logice care descriu comportamentul sistemului real pe durata unui interval de timp. Churchman a definit procesul de simulare ca o modalitate de a pune în corespondenţă două sisteme formale X (sistemul simulator) şi Y (sistemul simulat) pentru a se studia sistemul real cu ajutorul sistemului simulator care poate fi manipulat în sensul obţinerii unei asemănări de comportament, validarea sistemului X făcându-se după anumite reguli. 6.2.2. Obiectivele simulării Proiectarea sistemelor şi proceselor este o activitate importantă a unei societăţi avansate din punct de vedere tehnologic şi informatic. Obiectivele proiectării şi simulării sistemelor şi proceselor sunt următoarele: - de a găsi soluţiile constructive optime pentru un sistem real în scopul realizării
rolului său funcţional şi de a putea emite predicţii asupra comportării şi performanţelor acestuia, pe baza modelului sau proiectului şi a unui set de informaţii legate de parametrii care determină funcţionarea sistemului;
- de a înţelege comportarea sistemului real pentru diverse condiţii de funcţionare prin realizarea unor simulări pentru diferite seturi de date de intrare efectuate pe baza modelului validat;
- de a studia comportarea sistemului real în anumite condiţii şi situaţii limită de funcţionare la acţiunea unor factori destabilizatori aleatorii, prin manipularea modelului de simulare pentru aceste condiţii limită în scopul observării performanţelor şi comportării acestuia din faza de proiectare;
- de a studia comportarea sistemului real faţă de stimuli externi de mare intensitate, cu acţiune de scurtă durată sau de lungă durată în scopul determinării caracteristicilor de siguranţă în funcţionare a sistemului real din faza de proiectare;
- de a fi un instrument eficace la îndemâna proiecatntului prin evidenţierea factorilor cu influenţă, a deficienţelor, a corelaţiei între performanţe şi cerinţele din tema de proiectare, a zonelor sensibile sau critice pentru un domeniu mare de parametri.

Popa Ion Florin, Marin Cornel, Filip Viviana
382
6.2.3. Rezultatele simulării
Pe baza definiţiilor de mai sus, se poate rezuma simularea ca o tehnică de construire a unui model al unui proces sau fenomen real în vederea studierii lui în anumite condiţii de experimentare. Modelul de simulare are deci un sens mai larg deoarece el reprezintă atât sistemul real, cât şi modul în care acesta răspunde la schimbarea datelor de intrare. În general, prin simulare nu se obţin valori optimale ca în cazul modelării analitice prin aplicarea unui algoritm, ci numai informaţii care descriu fenomenul prin experimente (fig.6.2.1) numiţi şi descriptori, care pot fi utilizaţi pentru prognoza comportamentului sau performanţelor sistemelor în anumite condiţii. Deci procesul de simulare poate fi privit din punct de vedere al rezultatelor obţinute ca o structură liniară formată dintr-un bloc având anumite date de intare şi un set de date de ieşire (fig.1.1). Manipularea se face prin modificarea datelor de intrare care se fac pe baza controlului datelor de ieşire şi a performanţele obţinute. Generarea noilor date de intrare se face pe baza unui algoritm de modificare care ţine seama de tendinţa de modificare a datelor de ieşire şi de criteriile de performanţă stabilite.
Fig. 6.2.1. Schema simplificată a simulării
FORMAREA MODELULUI
MODELAREA ANALITICĂ
REZOLVAREA MODELULUI
REZULTATE OPTIMIZATE
REZULTATE DESCRIPTIVE
PROCEDURA DE SIMULARE

Modelarea şi simularea sistemelor mecatronice
383
6.2.4. Caracteristici, avantaje şi dezavantaje ale simulării Faţă de celelalte metode de studiu ştiinţific ale fenomenelor şi sistemelor reale, simularea se diferenţiază prin următoarele caracteristici: - este o metodă formală, ca şi metodele analitice bazate pe modele matematice,
incluzând elemente intuitive, euristice sau analitice; - are caracter procedural deoerece se bazează pe prelucrarea unopr experimente
efectuate cu ajutorul modelului de simulare; - gradul de aproximare al sistemului sau fenomenului real este mai redus în cazul
utilizării modelului de simulare în raport cu alte metode; - este o metodă adecvată unor procese de conducere şi decizie caracteristice
sistemelor automate moderne, prin testarea valorilor specifice ale variabilelor decizionale şi observarea impactului acestora asupra funcţionării sistemului;
- nu realizează optimizarea procesului ci numai o descriere a comportării acestuia pentru anumite seturi de valori ale variabilelor de intrare, printr-un şir de experimente care estimează efectul global al unei acţiuni.
Principalele avantaje ale metodei de simlulare sunt: 1. permite studiul sistemelor reale fără a se modifica evoluţia acestora, prin
conservarea lor; 2. permite studiul sistemelor reale în situaţii limită, evitându-se distrugerea lor sau
anumite catastrofe naturale sau accidente ce pot însoţi un experiment; 3. oferă schimbarea condiţiilor de intrare la diferite momente de timp şi studiul
efectelor acestor modificări asupra funcţionării sistemului, lucru imposibil în cazul sistemelor reale ai căror parametri nu pot fi controlaţi separat;
4. simularea poate dezvălui relaţii ascunse sau imperfecţiuni ce pot afecta funcţionarea sistemului real, imperfecţiuni care pot fi corectate sau eliminate în scopul realizării performanţelor dorite din faza de proiectare;
5. modelul de simulare poate fi construit într-un mod interactiv prin integrarea unor subsisteme simple şi permite modificarea lui prin adăugarea sau suprimarea unor blocuri în funcţie de rezultatele obţinute;
6. se pretează unui număr mare şi divers de aplicaţii şi asigură o interfaţă utilă între experiment şi sistemul real, permite experimente pentru determinarea influenţei diferitelor variabile sau a ponderii acestora asupra performanţelor sistemului;
7. asigură un grad ridicat de integrare a sistemelor reale, nefiind limitat la un anumit nivel de complexitate, nu necesită simplificări substanţiale ale sistemului real;
8. realizează compresii sau dilatări în timp necesare efectuării unor experimente, pentru a facilita observarea unor fenomene care în mod natural sunt afectate de curgerea rapidă sau prea lentă a timpului;
9. asigură o precizie şi acurateţe a rezultatelor experimentelor caracteristice unui experiment ştiinţific.

Popa Ion Florin, Marin Cornel, Filip Viviana
384
Principalele dezavantaje ale acestei metode de studiu sunt: • necesită profesionalism şi efort deosebit, o cunoaştere justă a realităţii şi a legilor
care caracterizează fenomenele studiate, a interrelaţiilor existente între variabile în special în cazul sistemelor sau fenomenelor complexe;
• necesită mijloace de calcul cu performanţe ridicate şi un suport software adecvat; • rezultatele simulării sunt deosebit de sensibile la modificări mici ale structurii
modelului şi la modificări ale relaţiilor cu mediul exterior; • oferă numai soluţii descriptive, pentru alegerea variantei optime fiind necesar un
proces special de optimizare; • soluţiile şi concluziile nu pot fi generalizate sau transferate la alte tipuri de
sisteme, simularea fiind dedicată unei anumite aplicaţii. 6.2.5. Conceptele simulării Conceptele cu care operează simularea au în contextul modelării şi simulării o semnificaţie particulară şi diferite particularităţi de interpretare. Astfel: a. Componenta este o unitate definibilă, identificabilă şi interconectabilă a unui sistem
care se caracterizează la un moment dat printr-o anumită stare şi evoluează în timp prin alte stări. Totalitatea acestor stări ale unei componente reprezintă evoluţia stărilor. Un caz particular de componentă este cea cu iniţiativă, care poate memora şi clasifica informaţiile primite şi poate lua decizii în conformitate cu un anumit obiectiv;
b. Legătura este un concept care exprimă interacţiunea dintre două componente sau dintre o componentă şi mediul înconjurător. Legăturile dintre elemente asigură evoluţia stărilor unei componente în funcţie de ieşirile componentei anterioare, legătura de intrare asigură transferul de informaţie din mediul exterior direct către componente sau subsiste pentru a se genera noi evenimente în sistem iar legătura de ieşire transferul de informaţie din sistem către mediul exterior care poate fi sau nu afectat de evoluţia stărilor sistemului (fig. 3.1);
c. Entitatea este conceptul de abstractizare de bază al sistemului real ce se caracterizează prin atributele funcţionale;
d. Sistemul a fost definit în primul capitol şi reprezină mulţimea componentelor (reale sau virtuale) aflate în interacţiune, integrate funcţional în scopul realizării unui obiectiv. Sistemul real este format dintr-o mulţime de componente şi are un caracter mixt, adaptiv şi perfectibil. Sistemul virtual este format dintr-o mulţime de entităţi integrate descriptiv pentru a realiza un model funcţional ideal;
e. Subsistemul este o parte a sistemului format din cel puţin o componentă, care se află în interacţiune cu alte subsisteme şi a cărui evoluţie permite realizarea unui subobiectiv al sistemului;
f. Sistemul echivalent sau sistemul analog se obţine din sistemul real din care se elimină acele componente având probabilitatea de apariţie a unui eveniment foarte mică sau acele componente a căror contribuţie la evoluţia stărilor sistemului este neglijabilă (fig.3.1). Sistemul echivalent păstrează din sistemul original acele componente esenţiale şi legături de bază şi elimină ceea ce poate fi considerat

Modelarea şi simularea sistemelor mecatronice
385
nesemnificativ. Sistemul echivalent poate fi construit cu ajutorul unor componente diferite faţă de cele originale (echivalente cu acestea), păstrându-se însă legăturile de bază în limitele atingerii unor performanţe stabilite. La proiectarea unui sistem echivalent se reconstituie şi se modifică sistemului original în vederea realizării unei evoluţii a stărilor cât mai apropiate de cele ala sistemului original;
g. Starea unui sistem este un concept fundamental care reuneşte atributele fiecărei entităţi şi care împreună definesc starea lui. Starea sistemului propriu-zis este definită de stările entităţilor principale. Principala problemă în studiul evoluţiei unui sistem sau proces constă în determinarea modului în care se produc schimbările de stare şi posibilitatea de predicţie şi control a desfăşurării procesului sau evoluţiei sistemului;
h. Evaluarea variantelor este conceptul care exprimă analiza diferitelor evoluţii ale unui sistem afectează mediul exterior. În celălalt sens, prin modificarea datelor de intrare se pot genera schimbări de stare ale sistemului. Analiza interacţiunii datelor de intrare asupra evoluţia stărilor sistemului (modelului de simulare) şi a datele de ieşire, pe atingerea unor obiective reprezintă esenţa conceptului de evaluare a variantelor. Se cunosc trei feluri de metodele de evaluare a variantelor: 1.prin definirea datelor de intrare, construirea modelului şi determinarea datelor de ieşire; 6.2. prin definirea datelor de intrare şi de ieşire, analiza şi sinteza structurii modelului şi modul în care corespunde obiectivelor fixate; 3. prin definirea datelor de ieşire, reprezentarea modelului şi determinarea datelor de intrare care să producă ieşirile definite;
i. Mărime, date - conceptul prin care legăturile sistemului şi stările care îl caracterizează pot fi convertite în valori numerice deterministe sau valori probabilistice (stohastice). Mărimile de intrare sau de ieşire sunt mărimi asociate unor legături de intrare respectiv de ieşire. Dacă mărimile de intare pot fi modificate uşor prin intervenţia directă asupra lor, mărimile de ieşire depind atât de mărimile de intrare şi de structura sistemului cât şi de factorii perturbatori care pot acţiona asupra sistemului. Mărimile perturbatoare (stimulii) nu pot fi controlate precis (numai cu o anumită probabilitate), fiind mărimi aleatoare;

Popa Ion Florin, Marin Cornel, Filip Viviana
386
Fig. 3.6.2. Schema unui sistem i l
ENTITATEA 1.1 ENTITATEA 2
ENTITATEA 1.2 ENTITATEA 3.1
ENTITATEA 3.2
L1-2
L2-3
L3-2
L1
L3
L0-1 L3-0
P0-1
Fig. 3.1. Schema unui sistem echivalent
COMPONENTA 1.1 COMPONENTA 2
COMPONENTA 1.2 COMPONENTA 3.1
COMPONENTA 3.2
L1-2
L2-3
L3-2
L1
L3
L0-1 L3-0
P0-1
S1
S3
Legenda figurilor 3.1 şi 3.2: - S1 , S3 - subsisteme; - L0-1; legături de intrare; L3-0 legături de ieşire; - L1, L3 – legături interne ale subsistemelor; - L1-2, 2-3, 3-2 - legături între subsisteme; - P0-1 – legături pentru măroimile perturbatoare - Componenta 3.1 – componentă cu iniţiativă; - Entitatea 3.1 – entitate cu iniţiativă.

Modelarea şi simularea sistemelor mecatronice
387
j. Evenimentul este conceptul care caracterizează schimbarea stării unui sistem, respectiv stările componentelor (sau entităţilor în cazul modelului);
k. Procesul este o secvenţă succesivă de evenimente ordonate în timp; l. Performanţa unui sistem reprezintă secvenţa de stări prin care trece sistemul într-un
interval de timp şi care oferă informaţii asupra parametrilor funcţionali în vederea atingerii obiectivului sistemului. Obiectivul simulării constă în atingerea unor performanţe optime prin îmbunătăţirea celor existente ce pot coincide sau nu cu performanţele sistemului real. În vederea atingerii performanţelor unui sistem nou proiectat este necesară introducerea unor restricţii sau criterii de optimizare în funcţie de natura sistemului, de preformanţele existente sau cele preconizate, de posibilitatea apariţiei unor conflicte în interiorul sistemului. Conceptul de simulator reprezintă un sistem echivalent care este supus unui proces de transformare asemănător cu cel al sistemului real şi este supus aceloraşi condiţii de funcţionare cu cele corespunzătoare sistemului real sau apropiate.
m. Modelul este conceptul de abstractizare a unui sistem real în sensul definit prin conceptul de sistem virtual, reprezentând o idealizare a realităţii obiective a sistemului real şi mediului exterior care depinde însă de nivelul de cunoaştere a acestora. Modelul ideal este modelul care corespunde precis cu fenomenul sau sistemul real din punct de vedere al performanţelor obţinute. Sistemele virtuale păstrează caracteristicile fundamentale ale legăturilor sistemului cu mediul şi legăturile între subsistemele sale, obiectivul general şi performanţele sale.
6.3. TEHNICI ŞI ETAPE ALE PROCESULUI DE SIMULARE 6.3.1. Clasificarea modelelor de simulare Modelele de simulare se clasifică după următoarele criterii: a. natura elementelor: modele fizice (machete, instalaţii, calculatoare analogice, etc),
modele abstracte (calitative, cantitative deterministe sau statistice, mixte calitativ-cantitative), modele hibride;
b. natura matematică a relaţiilor din cadrul modelului: modele liniare (input-output), modele neliniare (programare pătratică, funcţii neliniare, etc).
c. natura evoluţiei sistemului modelat: modele statistice, modele dinamice (stabile, instabile);
d. obiectul analizei: modele tehnice, economice, sociale, etc. e. natura variabilelor: modele discrete şi modele continue.

Popa Ion Florin, Marin Cornel, Filip Viviana
388
6.3.2. Clasificarea tehnicilor de simulare Tehnicile de simulare se clasifică după următoarele criterii: a. după natura echipamentului utilizat: tehnici de simulare analogică (simulare
analogică directă şi indirectă), tehnici de simulare numerică sau digitală (simularea numerică electronică, de tip joc, simularea Monte-Carlo pentru modele probabilistice, simulare hibridă);
Fig.6. 3.1. Etapele procesului de simulare
1. ANALIZA ŞI SINTEZA SISTEMULUI
2. CONCEPEREA ŞI PROIECTAREA MODELULUI
3. REALIZAREA MODELULUI
4. VALIDAREA MODELULUI
5. SIMULAREA PROPRIU-ZISĂ
6. ANALIZA ŞI INTERPRETAREA REZULTATELOR
7. MARCAREA TIMPULUI DE SIMULARE
8. LIMITELE SIMULĂRII

Modelarea şi simularea sistemelor mecatronice
389
b. după natura algoritmilor utilizaţi: simulare deterministă dirijată, simulare aleatorie Monte Carlo, simulare deterministă cu perturbaţie aleatorie;
c. după raportul între timpul real şi timpul de simulare: simulare în timp real (raport unitar), simulare în pseudotimp (raport subunitar - simulare încetinită sausupraunitar – simulare accelerată);
d. după momentul efectuării simulării: tehnici de antesimulare (când simularea are loc înaintea desfăsurării sistemului real) şi tehnici de postsimulare (când simularea are loc după desfăşurarea procesului, respectiv după dobândirea unei anumite experienţe în producerea lui).
6.3.3. Etapele procesului de simulare Un proces de simulare nu se desfăşoară la întâmplare, ci într-o anumită logică, după o anumită procedură, cu parcurgerea etapelor prezentate în figura 3.1.
6.3.3.1 Analiza şi sinteza sistemelor Prima etapă a unui proces de simulare este analiza şi sinteza sistemului premergătoare concepţiei şi proiectării lui. Analiza unui sistem constă în descompunerea lui în părţi componente în scopul înţelegerii naturii sistemului şi trăsăturilor sale esenţiale. Analiza este prima etapă a proiectării sistemului şi constă în selectarea componentelor şi subsistemelor, realizarea procedurilor necesare pentru studiul acestor componente şi subsisteme. Sinteza unui sistem este a doua etapă a proiectării şi constă în compunerea sau combinarea componentelor şi subsistemelor pentru realizarea sistemului complet capabil să atingă un anumit nivel de performanţă. Conceperea şi proiectarea sistemelor şi modelelor corespunzătoare este o activitate de analiză şi sinteză care operează cu componente respectiv entităţi în vederea obţinerii unui anumit nivel de performanţă pentru sistemul real. Pentru etapa de concepţie şi proiectare a sistemului trebuiesc înteprinse următoarele acţiuni pregătitoare care se fac în cadrul analizei şi sintezei: - determinarea variabilelor de decizie, asupra cărora se deţine un control exact şi
complet şi a variabilelor de stare care descriu starea sistemului în orice moment şi care depind de variabilele de decizie;
- identificarea unui model optimal implică analiza şi sinteza unui model analog sistemului virtual care implică aceleaşi operaţii pentru sistemul real. Modelul optimal poate fi uşor de întreţinut şi de evaluat cantitativ;
- măsurarea performanţelor sistemului cu ajutorul unei funcţii obiectiv prin evidenţierea deciziilor şi valorilor variabilelor de stare pentru fiecare set de mărimi de intrare)

Popa Ion Florin, Marin Cornel, Filip Viviana
390
6.3.3.2. Concepţia şi proiectarea modelului Concepţia şi proiectarea modelului este a doua etapă a procesului de simulare şi are trei obiective: 1. Formularea şi stabilirea în detaliu a tuturor aspectelor problemei legate de: - ipotezele de lucru, de material, de comportare, etc. - efectele care se estimează a se obţine cu ajutorul modelului proiectat; - influenţa caracteristicilor operative asupra variabilelor şi parametrilor de ieşire; - influenţa variabilelor şi parametrilor de intrare asupra variabilelor şi parametrilor
de ieşire; - tehnici de reducere a datelor şi prelucrare a rezultatelor; - ecuaţiile matematice ce urmează a fi utilizate. 2. Colectarea şi prelucrarea datelor primare este un obiectiv ce urmăreşte cunoaşterea precisă a datelor de intare, modul în care se obţin şi cum pot fi acestea folosite ca date de intrare pentru model. Ca surse de date intrare pot fi: datele din rapoartele şi documentele ce se găsesc în literatura de specialitate, datele experimentale obţinute pe un sistem identic cu cel modelat, datele obţinute pe un sistem similar şi prelucrate conform unor criterii de similitudine. 3. Stabilirea modelului potenţial se face în urma unei analize a funcţiilor, factorilor externi şi a modului prezumtiv de evoluţie al modelului:
- identificarea tuturor funcţiilor pe care le realizezează sistemul şi stabilirea corectă a funcţiilor care urmează a fi folosite pentru model;
- stabilirea modului de reprezentare a acestor funcţii şi a legilor constitutive (deterministe sau aleatorii);
- identificarea factorilor de mediu care influenţează performanţele sistemului şi a modului cum se poate interacţiona asupra sistemului;
- predicţia modului de evoluţie a acestuia; - definirea parametrilor şi variabilelor modelului.
Parametrii modelului sunt de două feluri: parametrii de sistem (asociaţi direct sistemului studiat) şi parametrii auxiliari (care nu sunt asociaţi sistemului studiat dar influenţează performanţele lui). Parametrii unui sistem tehnic sunt: - parametrii statici legaţi de poziţia sistemului la momentul iniţial ce exprimă starea
lui în raport cu un sistem de referinţă la începutul simulării; - parametrii cinematici sunt parametrii asociaţi mişcării sistemului în raport cu
sistemul de referinţă considerat, distribuţia de viteze a sistemului la momentul iniţial;
- parametrii dinamici care determină comportarea dinamică a sistemului: inerţia sistemului, câmpurile de forţă sau acţiunile externe la care este supus sistemul (câmpuri de forţe conservative şi neconservative, disipative sau cu amortizare).
Variabilele modelului măsoară informaţiile care se transmit: în interiorul sistemului (variabile interne sau intermediare), din mediul exterior în sistem (variabile

Modelarea şi simularea sistemelor mecatronice
391
de intrare), din sistem spre mediul exterior (variabile de ieşire). Aceste variabilele au un caracter determinist controlabil. O categorie aparte de variabile ce acţionează din mediul exterior asupra sistemului sunt cele cu caracter aleator (variabile perturbatoare sau stimuli) care se exprimă prin probabilităţi . Variabilele de intrare, intermediare şi de ieşire îşi modifică permanent valorile în timpul unui ciclu de simulare. Dacă o variabilă nu se modifică în timpul unui ciclu de simulare, aceasta devine parametru. În elaborarea modelului de simulare un obiectiv important îl constituie stabilirea relaţiilor între variabile. Dacă nu se cunosc aceste relaţii se folosesc diferite analogii sau se folosesc estimări probabilistice ale variabilelor dominante cu ajutorul intervalelor de încredere sau folosind diferite tehnici de regresie. Verificarea validităţii modelului se face prin anumite teste statistice prin care se verifică corectitudinea estimării parametrilor, dacă modelul conţine variabilele esenţiale şi dacă relaţiile între parametrii sunt corect alese. Verificarea validităţii modelui, a relaţiei dintre model şi schema logică (ecuaţiile matematice) stabileşte corectitudinea fluxului experimentelor, plasarea corectă a punctelor de decizie şi conectorilor, concordanţa dintre parametrii reali şi formali, plasarea corespunzătoare a surselor şi iniţializărilor, precizia constantelor şi valorilor iniţiale.
6.3.3.3. Realizarea modelului de simulare A treia etapă a procesului de simulare presupune transpunerea schemei logice sau algoritmului matematic care stă la baza modelului într-un limbaj de programare, conceput special pentru simulări. Câteva astfel de programe de simulare profesionale realizate de firme specializate sunt: MATHEMATICA, DYNAMO, DADS, PROENGINEERING - PROMECANICA, MATLAB-SIMULINK, MATCAD, SOLID WORKS, COSMOS WORKS, ANSYS, etc. Se determină:
• resursele de calcul pentru realizarea simulării; • specificaţiile şi metodele de verificare a programului; • timpul de simulare; • facilităţile de depanare şi întreţinere a programului.
Un algoritm general de simulare este prezentat în figura 3.2 şi cuprinde unsprezece paşi:
1. Introducerea principalelor date de simulare 2. Iniţializarea ciclului de simulare 3. Generarea secvenţelor şi strategiilor de prevenire a elementelor
perturbatoare şi modificare eficientă a parametrilor 4. Generarea unei secvenţe de evenimente perturbatoare 5. Analiza comportării sistemului pe orizontul de simulare 6. Simularea strategiilor de comportament pentru a se verifica dacă
corespunde sau nu unei anumite strategii şi eveniment planificat

Popa Ion Florin, Marin Cornel, Filip Viviana
392
7. Evaluarea consecinţelor comportamentale 8. Evaluarea funcţiilor de eficienţă 9. Prelucrarea statistică a datelor de simulare (determinarea mediilor şi
dispersiilor) 10. Determinarea strategiei celei mai eficiente 11. Afişarea rezultatelor finale.
6.3.3.4. Validarea modelului Cea mai simplă metodă de validare a modelului de simulare constă în rularea acestuia pentru simularea sistemului într-un caz particular. Datele de intrare se aleg astfel încât să se asigure parcurgerea tuturor traseelor informaţiei sistemului prin care se solicită toare subsistemele şi se editează toate tipurile de rezultate. O altă metodă de validare a modelului este prin verificarea corectitudinii sensului şi logicii algoritmului general de simulare sau prin verificarea reprezentabilităţii sistemului de simulare (gradul de acoperoire a rezultatelor obţinute prin simulare) pentru tipul sistemului studiat. 6.3.3.5. Simularea propriu-zisă Simularea propriu-zisă se face în două faze: faza de rulare iniţială pentru testele pilot şi faza de rulare finală. Rularea iniţială pentru testele pilot urmăreşte stabilirea nivelului de sensibilitate a rezultatelor la schimbarea parametrilor de intrare. Rularea finală are următoatele scopuri: a. descrierea completă a evenimentelor (prin stabilirea structurii, mărimii eşantionului, a variabilelor independente şi diferenţelor semnificative); b. mărimea rulării (optimizarea numărului de rulări, a timpilor de rulare); c. reducerea variantelor (selectarea variantelor credibile).
6.3.3.6. Marcarea timpului de simulare În orice model de simulare se introduce variabila de ieşire numită ceasul simulării, care stabileşte la fiecare pas intervalul de timp în care se simulează procesul real. Variabila de timp poate creşte sau scădea cu o anumită valoare, cu pas constant (increment) sau cu pas variabil.

Modelarea şi simularea sistemelor mecatronice
393
1.Introducerea principalelor date de simulare
2. Iniţializarea ciclului de simulare
3.Generarea secvenţelor şi strategiilor de prevenire a elementelor
perturbatoare şi modificarea eficientă a parametrilor
4.Generarea unei secvenţe de evenimente perturbatoare
5. Analiza comportării sistemului pe orizontul de simulare
7. Evaluarea consecinţelor comportamentale
6.Simularea strategiilor de comportament
NU
DA
NU DA
Corespunde strategiei ?
Corespunde unui eveniment planificat ?
8. Evaluarea funcţiilor de eficienţă
2 1
Fig. 6.3.2. Algoritmul general de simulare

Popa Ion Florin, Marin Cornel, Filip Viviana
394
6.3.3.7. Posibilităţi şi limite de simulare Elementul principal al simulării după validarea modelului devine procesul suport al simulăriii care oferă elemente de predicţie şi de repetare al evenimentului, compararea şi dilatarea timpului de realizare a evenimentului la valoarea necesară înţelegerii experimentului, realizează o comportare paralelă sau în timp real, poate face o simulare de analiză pe elemente componente sau o simulare de sinteză pe o corelaţie de sisteme şi evenimente, realizează viteze variabile de execuţie, flexibilitate şi precizie, permite supravegherea individuală sau corelată a unor parametrii.
Fig. 3.2. Algoritmul general de simulare (continuare)
9. Prelucrarea statistică a datelor de simulare
NU DA Corespunde strategiei celei mai eficace?
11. Afişarea rezultatelor finale
1 2
10. Determinarea strategiei celei mai eficace

Modelarea şi simularea sistemelor mecatronice
395
6.4. MODELAREA SISTEMELOR ŞI PROCESELOR
6.4.1. Conceptele modelării Conceptele cu care operează modelarea au următoarele particularităţi de interpretare: - un model este o descriere într-o formă definită a anumitor comportări ale
sistemului sau fenomenului având ca scop realizarea unei prognoze a comportării lui pentru diferite seturi de mărimi de intrare şi stimuli;
- simularea sistemelor reale este o formă de studiu a realităţii care foloseşte ca formă de reprezentare un model;
- limita reducerii elementelor pentru realizarea modelului nu trebuie să afecteze aspectele esenţiale ale sistemului real, prin reducere înţelegând neglijarea unor aspecte sau elemente nesemnificative ale sistemului;
- cerinţele de bază ale unui model sunt: a. să reprezinte structura sistemului real şi interacţiunile dintre elementele
acestuia şi să permită modificări ale configuraţiei prin ajustarea unor parametrii sau ai unor variabile;
b. să permită unele modificări în regim dinamic pentru alocări de resurse şi luarea unor decizii riguroase, să răspundă prompt şi exact la schimbarea unor date de intrare sau stări ale sistemului în timpul simulării;
c. să permită vizualizarea efectelor unor modificări ale datelor de intrare la încărcarea şi comportarea interioară a sistemului prin prelucrarea datelor de ieşire.
- elementele şi facilităţile modelului sunt: a. confirmă sau infirmă justeţea unor ipoteze simplificatoare folosite la reducerea
sistemului real şi implicaţiile logice ale acestor ipoze simplificatoare; b. cunoaştera profundă a realităţii sistemului sau fenomenului studiat; c. observarea răspunsului dinamic al sistemului la variaţia mărimilor de intrare; d. sesizarea unor surse care generează diferite stări intermediare de tranziţie spre
starea de regim de funcţionare normală (regim staţionar). - obiectivele esenţiale ale procesului de modelare a unui sistem real sunt:
a. reprezentarea cât mai precisă a sistemului real sau cel puţin a caracteristicilor sale esenţiale (critice)
b. uşurinţa manipulării modelului în timpul procesului de simulare.

Popa Ion Florin, Marin Cornel, Filip Viviana
396
- Tipurile de modele ce atind aceste obiective pot fi: a. modele analogice – o reprezentare a sistemului ce utilizează proprietăţi fizice
de o anumită natură pentru a reprezenta proprietăţi fizice de altă natură, mărimile lor fiind proporţionale sau analogice;
b. modele simbolice – proprietăţile fizice ale sistemului sunt reprezentate printr-un set de variabile şi relaţiile dintre aceste variabile sunt exprimate cantitativ (numeric) sau logic (în sistem binar);
c. modele iconice – o reprezentare a sistemului direct în dimensiuni sau imagini definite (hartă, miniaturi, machete, iconuri).
- cerinţele pentru realizarea unui model trebuie să răspundă la întrebările: a. care este tehnica ce se utilizaează, sau ce tip de model se foloseşte ? b. care este nivelul de detaliu la care se ajunde la construirea modelului ? c. are este limita de simplificare a sistemului pentru a nu pierde proprietăţile sale
esenţiale? d. Care este metoda de validare a modelului?
- modelarea analitică este una dintre primele tehnici de construire a unui model care cuprinde următoarele etape: a. formalizarea problemei (enunţarea corectă a problemei de rezolvat); b. definirea parametrilor dominanţi; c. construcţia modelului matematic analitic sau experimental (numeric); d. testarea şi verificarea comportamentului modelui construit; e. validarea şi interpretarea rezultatelor
6.4.2. Etapele modelării unui fenomen Schema generală a etapelor modelării unui sistem sau fenomen este dată în figura 4.1 şi cuprinde cinci etape importante: 1. Formularea problemei implică cunoaşterea legilor care stau la baza fenomenelor şi
înţelegerea cât mai corectă a modului cum evoluează sistemul pentru a-l defini cât mai bine. În această fază trebuiesc lămurite aspectele legate de conţinutul informaţiilor temei, caracteristicile mediului şi mijloacele ce urmează a fi folosite pentru definirea riguroasă a problemei.
2. Identificarea variabilelor dominante din sistem şi reprezentarea lor prin analiza sistemului sau a descompunerii lui în subsisteme sau componente.
3. Abordarea în fux, este etapa în care se evidenţiază modul în care evoluează spaţiul sistemului aplicând metoda de analiză de la intrare la ieşire. De asemenea se realizează o descompunere a sistemului în subsisteme şi componente tratându-se succesiv procesele rezultate pentru fiecare nivel.

Modelarea şi simularea sistemelor mecatronice
397
1. Formularea temei
2. Identificarea variabilelor dominante
NU DA Corespunde sistemului
modelat ?
Ajustarea modelului
STOP
Informaţii
Mediu
Mijloace
Mijloace Reprezentarea
pe subsisteme sau componenete
3. Abordarea în flux Înţelegerea proceselor şi identificarea sistemului
Descompunerea în subsisteme
Tratarea proceselor
Evoluţia spaţiului sistemului de la intrare la ieşire
4. Abordarea funcţională Modelarea şi reprezentarea
funcţiilor
Definirea funcţiilor
Evoluţia sistemului
5. Analiza schimbărilor de stare
Mărimi de intare
Stimuli exteriori
Fig. 6.4.1. Etapele modelării unui fenomen

Popa Ion Florin, Marin Cornel, Filip Viviana
398
4. Abordarea funcţională, este etapa în care se realizează modelarea propriu-zisă şi se determină procedurile prin care fiecare funcţie poate fi reprezentată pentru a obţine informaţii asupra evoluţiei modelului.
5. Analiza schimbărilor de stare este ultima etapă a modelării în care se generează difereite seturi de mărimi de intrare şi stimuli exteriori pentru a analiza rezultatele obţinute la ieşire (performanţele) şi a observa dacă modelul satisface sau nu cerinţele impuse la formularea problemei. Modelul se ajustează în funcţie de rezultatele obţinute în această etapă.
6.4.3. Verificarea, aproximarea şi validarea modelului Prin verificarea modelului se testează consistenţa modelului, gradul în care acesta poate fi manipulat (operabilitatea modelului), dacă modelul nu conţine erori şi corespunde cerinţelor stabilite. Prin aproximare se realizează o serie de operaţii tipice de ajustare a modelului până când acesta corespunde unor valori acceptabile pentru scopul propus (performanţele cerute). În figura 4.2 sunt prezentate tipurile de aproximări folosite în modelarea sistemelor. Prin validarea modelului se testează dacă aproximările efectuate asupra modelului corespund ca niveluri de apreciere. Datorită faptului că ieşirile sistemului real şi ale modelului nu au distribuţii identice, pentru validare sunt necesare teste statistice.
Aproximarea funcţională
Temporară
Fig. 6.4.2 Tipuri de aproximări în modelarea sistemelor
Funcţii reale
Funcţii matematice
Funcţii liniare
Aproximarea distribuţională
Distribuţii de probabilitate
Distribuţii normale sau exponenţiale
Aproximarea independenţei
Componente independente
Aproximarea agregării
Evenimente simultane
Secţionată A resurselor Temporală De staţionaritate
Amplificare Diminuare

Modelarea şi simularea sistemelor mecatronice
399
Bibliografie 1. Voinea, R., Bratosin, D. – Elemente de mecanica mediilor continue. Editura EX PONTO,
Constanţa 2000. 2. Bratu, P.P. - Izolarea şi amortizarea vibraţiilor la utilaje de construcţii. Editura INCERC,
Bucureşti 1982 3. Bratu, P.P.- Vibraţiile structurilor mecanice. Editura Tehnică, Bucureşti, 2000 4. Marin,C. - Vibraţiile structurilor mecanice. Editura Impuls, Bucureşti, 2003. 5. Hadar, A., Marin,C. , Petre, C., Voicu, A. – Metode numerice în inginerie. Editura Politehnica
Press, Bucureşti, 2005. 6. Marin,C. Voicu, A., Popa, F., Ardeleanu, M. – Comportarea modelului reologic vâscoelastic
Voigt Kelvin folosit la izolarea antivibratorie sub acţiunea unor sarcini periodice nearmonice. Lucrare prezentată la al IX lea Simpozion Naţional de Utilaje pentru Construcţii, Bucureşti 11-12 decembrie 2003.
7. Marin,C. Voicu, A., Popa, F., Ardeleanu, M. – Comportarea modelului reologic vâscoelastic Voigt Kelvin Hooke folosit la izolarea antivibratorie a aparaturii mecatronice sub acţiunea unor sarcini periodice nearmonice. Supliment Nr. 9. Revista Română Mecanică Fină, Optică şi Mecatronică Nr. 24 / 2003, - ISSN 1220 – 6830
8. Marin, C., Voicu, A., Popa, F., Ardeleanu, M. – Comportarea modelului reologic vâscoelastic Hooke Maxwell folosit la izolarea antivibratorie a aparaturii mecatronice sub acţiunea unor sarcini periodice nearmonice. Supliment Nr. 9. Revista Română Mecanică Fină, Optică şi Mecatronică Nr. 24 / 2003, ISSN 1220 – 6830.
9. Marin, C. - Influenţa rigidităţii relative a elementelor elastice asupra comportării dinamice a modelului vâscoelastic Zener pentru un semnal de tip dreptunghiular şi alternativ . A VIII-a Sesiune de comunicări ştiinţifice a studenţilor şi cadrelor didactice a universităţii VALAHIA Târgovişte, 2005.
10. Marin, C. Voicu, A., Popa, F. - Simularea comportării modelului reologic Voigt - Kelvin la o încărcare de tip impuls pentru diferite valori ale coeficientului de umplere. Sesiunea de comunicări ştiinţifice SIMEC 2005, UTCB Bucuresti , Facultatrea de Utilaj Tehnologic, 25 martie 2005, pp.63-68
11. Marin, C. - Simularea comportării modelului vâscoelastic Voigt Kelvin pentru încărcarea cu un semnal dreptunghiular de tip impuls şi alternaliv utilizând dezvoltarea în serie Fourier . A VIII-a Sesiune de comunicări ştiinţifice a studenţilor şi cadrelor didactice, Târgovişte 9-10 iunie 2005.
12. Marin, C. - Simularea comportării unor materiale vâscoelastice folosind modelele Maxwell generalizat şi Zener. Conferinţa Naţională de Mecanica Solidelor, Ploiesti, CNMS 2005.
13. Marin, C. - Simularea comportării unor materiale vâscoelastice folosind modelul Voigt-Kelvin generalizat. Conferinţa Naţională de Mecanica Solidelor, Ploiesti, CNMS 2005.