![1 Pagina 04-05 Lumina-tabloid 15 martie 2011biserica-romana.at/pdf/Lumina_martie2011.pdf · clisul mitropolitan „Maica Domnului - Dudu“ din Craiova, de c\tre ~nalt Preasfin]itul](https://static.fdocumente.com/doc/165x107/5e3e5f443c9ea557a06967dc/1-pagina-04-05-lumina-tabloid-15-martie-2011biserica-clisul-mitropolitan-amaica.jpg)
Modelarea efectelor c^ampului electromagnetic de^ nalt a ...lmn.pub.ro/~mihaladi/main.pdf ·...
95
Universitatea ”POLITEHNICA” Bucure¸ sti, Facultatea de Inginerie Electric˘ a, Modelarea efectelor cˆ ampului electromagnetic de ˆ ınalt˘ a frecvent ¸˘ a din componentele pasive ale circuitelor integrate Proiect de Diplom˘ a Autor: student: Diana Elena Mihalache grupa: 152 IC, Coordonator: Conf. dr. ing. Gabriela Ciuprina 29 iunie 2005
Transcript of Modelarea efectelor c^ampului electromagnetic de^ nalt a ...lmn.pub.ro/~mihaladi/main.pdf ·...
Universitatea ”POLITEHNICA” Bucuresti, Facultatea de Inginerie Electrica,
Modelarea efectelor campului
electromagnetic de ınalta frecventa din
componentele pasive ale circuitelor integrate
Proiect de Diploma
Autor: student: Diana Elena Mihalache
grupa: 152 IC,
Coordonator: Conf. dr. ing. Gabriela Ciuprina
29 iunie 2005

Cuprins
1 Introducere 1
2 Formularea problemei ın camp electromagnetic 3
2.1 Regimul general variabil al campului electromagnetic . . . . . . . . . . . . 3
2.2 Teorema de unicitate ın regim general variabil . . . . . . . . . . . . . . . . 9
2.3 Elementul electromagnetic de circuit . . . . . . . . . . . . . . . . . . . . . 10
2.4 Formularea problemelor Codestar . . . . . . . . . . . . . . . . . . . . . . . 13
3 Analiza numerica a campului electromagnetic prin metoda integrarilor
finite 16
3.1 Metoda integrarilor finite . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.2 Modele cu parametrii concentrati . . . . . . . . . . . . . . . . . . . . . . . 24
3.2.1 Modelul rezistiv cu parametrii concentrati . . . . . . . . . . . . . . 24
3.2.2 Modelul inductiv cu parametrii concentrati . . . . . . . . . . . . . . 26
3.2.3 Modelul capacitiv cu parametrii concentrati . . . . . . . . . . . . . 29
3.2.4 Modele de circuite RLC cu parametrii concentrati . . . . . . . . . 31
4 Analiza numerica a campului electromagnetic cu ASITIC 36
4.1 Prezentarea programului . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.2 Metode de rezolvare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5 Modelarea structurilor pasive din circuitele integrate 43
5.1 Influenta unor parametrii asupra rezultatelor . . . . . . . . . . . . . . . . . 43
5.1.1 Influenta numarului de noduri ale retelei de discretizare . . . . . . . 47
5.1.2 Studiul influentei domeniului de calcul . . . . . . . . . . . . . . . . 48
i
CUPRINS ii
5.2 Modelarea bobinei . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
5.2.1 Formularea problemei . . . . . . . . . . . . . . . . . . . . . . . . . . 51
5.2.2 Rezultatele experimentale disponibile . . . . . . . . . . . . . . . . . 53
5.2.3 Rezolvarea problemei de camp cu FIT . . . . . . . . . . . . . . . . 54
5.2.4 Rezolvarea problemei de camp cu ASITIC . . . . . . . . . . . . . . 57
5.2.5 Calculul inductivitatii cu ajutorul unui program dezvoltat la Uni-
veristatea Stanford . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.3 Modelarea rezistorului . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.3.1 Formularea problemei . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.3.2 Rezultatele experimentale . . . . . . . . . . . . . . . . . . . . . . . 62
5.3.3 Rezolvarea problemei de camp cu FIT . . . . . . . . . . . . . . . . 63
5.4 Modelarea linie de transmisie . . . . . . . . . . . . . . . . . . . . . . . . . 66
5.4.1 Formularea problemei . . . . . . . . . . . . . . . . . . . . . . . . . . 66
5.4.2 Rezultate experimentale disponibile . . . . . . . . . . . . . . . . . . 67
5.4.3 Rezolvarea problemei de camp cu FIT . . . . . . . . . . . . . . . . 67
6 Concluzii 70
Anexe 71
A Fisierul xml 71
B Fisierul tek 85
C Relatii utile 88
Bibliografie 91
ii
Multumiri
In primul rand doresc sa ıi multumesc doamnei Conf. dr. ing. Gabriela Ciuprina pentru
ajutorul si ındrumarea acordata ın elaborarea acestui proiect, precum si pentru suportul
acordat ın toti anii de practica efectuata ın cadrul Laboratorului de Metode Numerice.
Ii multumesc, de asemenea, domnului Prof. dr. ing. Daniel Ioan pentru ca mi-a
oferit oportunitatea de a lucra la un proiect atat de interesant ın cadrul Laboratorului de
Metode Numerice.
Multumesc echipei Laboratorului de Metode Numerice care m-a ajutat ın ıntelegerea
programului de simulare CODESTAR.
Ii multumesc domnului profesor Ali Niknejad de la Universitatea din California, pentru
suportul acordat ın ıntelegerea programului de simulare ASITC.
In cele din urma, dar nu ın ultimul rand, vreau sa multumesc familiei, ın special
parintilor mei, care m-au sprijinit si care au fost tot timpul alaturi de mine.
iii
Capitolul 1
Introducere
In tehnologia realizarii circuitelor integrate, aspecte legate de cost si de miniaturizare
au condus la ıncorporarea componentelor pasive pe cipuri. Micsorarea dimensiunilor
cipului si cresterea frecventei au condus la cresterea importantei unor efecte parazite
cum ar fi: interferente intre conductoare metalice, cuplaj electromagnetic mai mare intre
diferite componente, propagarea undelor electromagnetice. Intelegerea si caracterizarea
acestor efecte, ınaintea procesului de fabricatie, este un aspect deosebit de important.
Folosirea simularilor cu ajutorul calculatorului are avantajul de a fi un proces mult mai
putin costisitor si mult mai rapid decat realizarea practica a unor cipuri de test. Pentru
validarea programelor de simulare folosite este necesara doar realizarea catorva structuri
de test.
In aceasta lucrare sunt prezentate rezultatele obtinute ın urma simularii catorva struc-
turi de test, ın comparatie cu rezultatele masuratorilor.
Avand ın vedere problemele abordate ın aceasta lucrare, ın al doilea capitol se face
o scurta prezentare a teoriei campului electromagnetic ın regim general variabil, pentru
corpuri imobile si medii liniare si buna formulare matematica a problemelor de camp
electromagnetic bazate pe modelarea cu ajutorul elementului electromagnetic de circuit,
cel mai potrivit ın cazul componentelor pasive din circuitele integrate.
Capitolele trei si patru sunt dedicate prezentarii metodelor folosite pentru analiza cla-
sei de probleme considerate. Astfel, mai ıntai este prezentata metoda integrarilor finite
folosita ın programul de simulare CODESTAR [2], urmand apoi metoda de rezolvare uti-
lizata de programul de simulare ASITIC [4], dezvoltat de Ali Niknejad de la Universitatea
din California.
Pentru a putea evalua calitativ acuratetea simularii efectelor campului electromagnetic,
rezultatele acestor simulari au fost comparate cu rezultatele obtinute din masuratori.
Masuratorile acestor dispozitive au fost realizate la Austriamicrosistem, ın cadrul progra-
mului FP5/IST/CODESTAR, cu ajutorul unor tehnici avansate de masurare a parametru-
lui de ımprastiere. Astfel, ın capitolul cinci se prezinta modelarea catorva structuri pasive
1

2
tipice: o bobina, un rezistor, o linie de transmisie. In cacul bobinei se prezinta si metodele
de estimare a inductivitatii bobinelor folosite de un program interactiv disponibil pe in-
ternet, de la Universitatea din Stanford [7].
Ultimul capitol prezinta concluziile lucrarii.
2

Capitolul 2
Formularea problemei ın camp
electromagnetic
2.1 Regimul general variabil al campului electromag-
netic
Fenomenele fundamentale care stau la baza functionarii unui dispozitiv electromagnetic
ın regim general variabil sunt de natura electrica si magnetica. Aceste fenomene sunt
descrise de legile campului electromagnetic. Avand ın vedere clasa de probleme abordate
ın aceasta lucrare, vom considera urmatoarele ipoteze simplificatoare ale regimului general
variabil:
• viteza corpurilor este nula v = 0;
• mediile sunt aizotrope si liniare din punct de vedere electric, magnetic si al conductiei.
In cele ce urmeaza vom reaminti legile ce descriu campul electromagnetic ın regim
general variabil si le vom particulariza ın cele doua ipoteze mentionate.
Legea fluxului electric
Fluxul electric prin orice suprafata ınchisa Σ este egal cu sarcina electrica din interiorul
domeniului marginit de Σ:
ψΣ = qDΣ⇔∫
Σ
D · dA =
∫
DΣ
ρdv.
Forma locala a acestei legi este :
divD = ρ.
3

2.1. Regimul general variabil al campului electromagnetic 4
Semnificatia fizica a legii este aceea ca orice corp electrizat (ρ 6= 0) produce ın vecinatatea
sa un camp electric. Fenomenul este ilustrat ın figura 2.1. In zonele neelectrizate liniile
de camp ale inductiei electrice sunt curbe continui.
D
> 0 < 0ρ ρ
Figura 2.1: Campul electric produs de corpuri electrizate
Legea fluxului magnetic
Fluxul magnetic prin orice suprafata ınchisa Σ este nul:
φΣ = 0 ⇔∫
Σ
B · dA = 0.
Forma locala a legii este:
divB = 0.
Legea fluxului magnetic nu evidentiaza un fenomen, ci o restrictie impusa campului
magnetic, care avand inductia solenoidala va avea liniile de camp curbe ınchise
(figura 2.2).
B
Figura 2.2: Spectrul inductiei magnetice
Legea inductiei electromagnetice
Tensiunea electrica de-a lungul oricarei curbe ınchise Γ este egala cu viteza de scadere a
fluxului magnetic printr-o suprafata arbitrara care se sprijina pe curba Γ:
uΓ = −dφSΓ
dt⇔∫
Γ
E · dr = − d
dt
∫
SΓ
B · dA.
4

2.1. Regimul general variabil al campului electromagnetic 5
Forma locala a legii ın ipotezele mentionate este:
rotE = −∂B∂t.
Semnificatia fizica a legii este aceea ca variatia ın timp a campului magnetic determina
(induce) aparitia unui camp electric. Liniile campului electric indus sunt curbe ınchise,
care tind sa ınconjoare campul magnetic inductor (figura 2.3).
E
B
Figura 2.3: Spectrul campului electric indus
Legea circuitului magnetic
Tensiunea magnetica de-a lungul curbei ınchise Γ este egala cu suma dintre curentul ce
strabate o suprafata arbitrara SΓ care se sprijina pe Γ si viteza de variatie a fluxului
electric prin SΓ:
umΓ= iSΓ
+dψSΓ
dt⇔∫
Γ
H · dr =
∫
SΓ
J · dA +d
dt
∫
SΓ
D · dA.
Forma locala a legii ın ipotezele mentionate este:
rotH = J +∂D
∂t.
Semnificatia fizica a legii este data de fenomenele pe care aceasta le descrie:
• orice corp ın stare electrocinetica (parcurs de curent) determina ın vecinatatea sa
un camp magnetic;
• variatia ın timp a campului electric determina aparitia unui camp magnetic.
Liniile campului magnetic sunt curbe ınchise care tind sa ınconjoare curentul care le-a
produs.
5

2.1. Regimul general variabil al campului electromagnetic 6
Legea conservarii sarcinii electrice
Curentul electric ce paraseste orice suprafata ınchisa Σ este egal cu viteza de scadere a
sarcinii electrice din domeniul marginit de acea suprafata:
iΣ = −dqDΣ
dt⇔∫
Σ
J · dA = − d
dt
∫
DΣ
ρdv.
Forma locala a legii conservarii sarcinii ın ipotezele adoptate este:
divJ = −∂ρ∂t.
Legea conservarii sarcinii pune ın evidenta legatura dintre starea de electrizare (sarcina
electrica) si cea electrocinetica (curentul electric).
Legea legaturii D-E
Inductia electrica dintr-un punct din spatiu depinde de intensitatea campului electric din
acel punct:
D = ε0E + P.
Daca se tine cont si de legea polarizatiei P = Pt +Pp, unde Pt = ε ¯χeE atunci rezulta:
D = ¯εE + Pp,
unde ¯ε = ε0 ¯εr = ε0(¯1 + ¯χe) este permitivitatea electrica.
Legea pune ın evidenta o noua cauza a campului electric si anume polarizatia perma-
nenta, care daca este nenula este capabila sa produca un camp electric (E 6= 0), chiar
daca D = 0.
Deoarece am considerat cazul mediilor liniare si izotrope relatia devine:
D = εE.
Legea legaturii B-H
Inductia magnetica dintr-un punct din spatiu depinde de intensitatea campului magnetic
din acel punct:
B = µ0(H + M).
6

2.1. Regimul general variabil al campului electromagnetic 7
Daca se tine cont si de legea magnetizatiei M = Mt + Mp, unde Mt = ¯χmH, atunci
rezulta B = ¯µH + µ0Mp, unde ¯µ = µ0 ¯µr = µ0(¯1 + ¯χm) este permeabilitatea magnetica .
Semnificatia fizica este evidentiata de fenomenul de producere a campului magnetic
datorat corpurilor magnetizate permanent. Astfel se evidentiaza a treia cauza a campului
magnetic si anume corpurile magnetizate permanent.
In cazul mediilor liniare si izotrope relatia devine:
B = µH.
Legea conductiei
Densitatea de curent dintr-un punct depinde de intensitatea curentului electric din acel
punct:
J = ¯σ(E + Ei).
Legea conductiei are o dubla semnificatie fizica, pe de o parte pune ın evidenta cauza
starii electrocinetice si anume campul electric iar pe de alta parte ea pune ın evidenta o a
patra cauza posibila a campului electric si anume campul electric imprimat (daca Ei 6= 0
atunci E 6= 0 chiar daca J = 0).
Daca se considera cazul materialelor izotrope si liniare (fara surse permanente), atunci:
J = σE.
Legea transormarii energiei ın conductoare
In procesul de conductie, campul electromagnetic transfera corpului o putere cu densitatea
de volum:
p = J · E.
Puterea transferata ıntregului corp care ocupa domeniul D se calculeaza prin integrarea
marimii p pe acest domeniu:
P =
∫
D
J · Edv.
Aceasta putere este disipata ireversibil ın cazul conductoarelor la care campul impri-
mat (Ei) este nul. In acest caz are loc o ıncalzire a corpului (efectul Joule-Lentz). In ma-
joritatea dispozitivelor electromagnetice fenomenele de ıncalzire joaca un rol important,
solicitarile termice fiind cele care impun limite ale regimurilor normale de functionare.
7

2.1. Regimul general variabil al campului electromagnetic 8
Legea transferului de masa
In procesul de conductie are loc un transfer de masa cu densitatea fluxului de masa:
δ = kJ,
ın care k este neglijabil ın metale si este coeficientul electrochimic ın electroliti.
Teorema energiei electromagnetice
Puterea transferata de campul electromagnetic prin frontiera Σ a unui domeniu DΣ de la
exterior catre interiorul acestui domeniu este egala cu puterea trensferata corpurilor din
domeniu plus viteza de crestere a energiei campului electromagnetic din domeniu:
PΣ = PDΣ+
dWem
dt.
Teorema energiei electromagnetice evidentiaza un bilant de puteri si energii ın acord
cu primul principiu al termodinamicii.
PDΣ
d Wdt
DΣ
PΣ
Σ
Figura 2.4: Puterea transferata de campul electromagnetic
Teorema fortelor generalizate
Teorema fortelor generalizate ın camp electric
Forta generalizata Xk cu care campul electric actioneaza asupra sistemelor de corpuri,
este:
Xk = −∂We
∂xk
∣
∣
∣
∣
ψ=ct
,
ın care energia campului electric din sistem este
We =
∫
D
wedv, cu we =
∫ D
0
E · dD,
iar coordonata generalizata este xk.
8

2.2. Teorema de unicitate ın regim general variabil 9
In cazul mediilor liniare energia electrica are expresia:
We =
∫
D
D · E2
dv.
Teorema fortelor generalizate ın camp magnetic
Forta generalizata Xk cu care campul magnetic actioneaza asupra unui sistem de cor-
puri este:
Xk = −∂Wm
∂xk
∣
∣
∣
∣
φ=ct
,
ın care energia campului magnetic din sistem este
Wm =
∫
D
wmdv, iar wm =
∫ B
0
H · dB.
In cazul mediilor liniare energia magnetica are urmatoare expresie:
Wm =
∫
D
B · H2
dv.
Fenomenele fundamentale descrise de legile campului electromagnetic stabilesc relatii
de tip cauza-efect cu referire la starile campului si corpurilor. Intr-un dispozitiv electro-
magnetic concret nu intervin toate aceste fenomene fundamentale, iar daca intervin, nu
toate au aceeasi importanta. In modelarea fizica trebuie identificate acele fenomene care
sunt esentiale pentru functionarea dispozitivului.
2.2 Teorema de unicitate ın regim general variabil
Enunt:
Solutia ecuatiilor campului electromagnetic este unic determinata ıntr-un domeniu
r ∈ DΣ si ıntr-un interval t ∈ [0, T ] daca sunt date urmatoarele conditii de unicitate:
a) Conditii initiale C0 = E(r, 0), H(r, 0)| r ∈ DΣ ;
b) Conditii de frontiera CΣ = Et(r, t), r ∈ SE, Ht(r, t), r ∈ SH | t ∈ [0, T ],
SE⋃
SH = Σ, SE⋂
SH = ∅ ;
c) Conditii de surse CD = Pp(r, t), Mp(r, t), Ei(r, t), | r ∈ DΣ, t ∈ [0, T ] .
Demonstratie:
Pentru demonstrarea acestei teoreme se presupune prin absurd ca exista doua solutii
distincte pentru problema fundamentala. Diferenta lor va satisface ecuatiile:
rotH = J +∂D
∂t, (2.1)
9

2.3. Elementul electromagnetic de circuit 10
divD = ρ. (2.2)
conditiile initiale E(r, 0) = 0, H(r, 0) = 0 si conditiile de frontiera Et = 0 sau Ht = 0.
Teorema energiei electromagnetice aplicata campului diferenta are forma locala:
div(H × E) = p+∂w
∂t, (2.3)
cu p = E · J, w = we + wm = D·E2
+ B·H2
si forma integrala:
PΣ = P +∂W
∂t, (2.4)
ın care:
PΣ =
∫
DΣ
div(H × E)dv =
∫
Σ
div(H × E) · dA =
∫
Σ
div(Ht × Et) · dA = 0. (2.5)
P =
∫
DΣ
pdv =
∫
DΣ
E · Jdv =
∫
DΣ
E · (¯σE)dv ≥ 0 (2.6)
W =
∫
DΣ
(D ·E
2+
B · H2
)dv =1
2
∫
DΣ
[E · (¯εE) + H · (¯µH)]dv ≥ 0 (2.7)
Intergand ın timp pe intervalul (0, tm) si tinand cont ca energia initiala este nula
(W (0) = 0), rezulta:
W (t) = −∫ tm
0
P (t)dt ≤ 0. (2.8)
Din (2.7) si (2.8) rezulta ca w = 0, ceea ce implica E = 0, H = 0 deci si D = 0, B = 0,
iar ın final J = 0, ρ = 0. Solutia diferenta fiind nula, rezulta ca cele doua solutii nu pot
fi distincte, ceea ce contrazice presupunerea initiala.
2.3 Elementul electromagnetic de circuit
Pentru modelarea componentelor pasive de pe circuitele integrate vom folosi conceprul de
element electromagnetic de circuit.
Elementul electromagnetic de circuit electric este un domeniu spatial DΣ Σ este
alcatuita din n parti disjuncte S1, S2, ...Sn numite borne si suprafata externa bornelor
Sl = Σ\⋃n
k=1 Sk numita si suprafata tensiunilor la borne, pe care sunt ındeplinite urmatoarele
conditii de frontiera:
CF 1. n · rotE(r) = 0, pentru (∀) r ∈ Σ
CF 2. n · rotH(r) = 0, pentru (∀) r ∈ Sl
CF 3. n × E(r) = 0, pentru (∀) r ∈ ⋃nk=1 Sk
10

2.3. Elementul electromagnetic de circuit 11
Sn
S
S2
1
Sl
δΩ
Γn
Figura 2.5: Elementul electromagnetic de circuit
Conform legii inductiei electromagnetice, prima conditie de frontiera este echivalenta
cu afirmatia ca valoarea componentei normale a inductiei magnetice Bn este constanta ın
timp pe frontiera Σ a domeniului DΣ. Aceasta conditie interzice deci orice cuplaj magnetic
si implicit fenomenul de inductie magnetica ıntre interiorul si exteriorul domeniului DΣ si
implicit fenomenul de inductie electromagnetica.
O conditie suficienta ce asigura ındeplinirea relatiei (CF 1.) este aceea de a exista un
potential scalar V definit pe frontiera Σ.
V : Σ → IR astfel ıncat Et(M) = −gradV pentru (∀)M ∈ Σ. (2.9)
A doua conditie de frontiera se refera la componenta tangentiala a intensitatii campului
magnetic. Conform legii circuitului magnetic aceasta conditie este satisfacuta daca val-
oarea componentei normale a curentului total (cel de conductie plus cel de deplasare) prin
suprafata laterala Sl se neglijeaza.
In acest fel se interzice atat cuplajele galvanice, cat si cele capacitive prin suprafata
externa bornelor; toate aceste conexiuni facandu-se exclusiv pe la borne.
Ultima conditie de frontiera se aplica doar bornelor si impune ca pe acestea, compo-
nenta tangentiala a campului electric Et sa fie nula. Acest lucru este realizat daca fiecare
borna este echipotentiala, iar avantajul principal este ca permite cuplarea naturala, pe la
borne, a acestor elemente cu altele de acelasi fel sau cu alte circuite.
Marimi caracteristice terminalelor elementului electromagnetic
de circuit
Marimile caracteristice terminalelor elementului electromagnetic de circuit sunt:
• intensitatea curentului prin borne este o marime fizica scalara asociata unei borne
ik =
∫
Γk
H · dr, pentru k = 1, 2, ...n,
ın care Γk = ∂Sk este bordura (orientata) bornei Sk;
11
2.3. Elementul electromagnetic de circuit 12
• potentialul electric al bornei
Vk =
∫
Ck
E · dr, pentru k = 1, 2, ...n,
ın care Ck ⊂ Σ este o curba arbitrara plasata pe frontiera domeniului, ce uneste
borna Sk de borna de referinta Sn.
Obs: Conform relatiei (2.9), tensiunea electrica calculata pe orice curba CMN plasata pe
frontiera Σ este:
UCMN=
∫
CMN
E · dr =
∫
CMN
Et · dr = −∫
CMN
gradV · dr = −V∣
∣
∣
∣
N
M
= VM − VN . (2.10)
Tensiunea electrica este nula pentru (∀) Γ ⊂ Σ, iar potentialul Vk ce se defineste
pe frontiera e determinat pana la o constanta aditiva, precizata prin fixarea bornei de
referinta.
Calculand puterea transferata dinspre exteriorul spre interiorul elementului electro-
magnetic de circuit, se demonstreaza ca ea este egala cu suma produselor dintre potentialele
bornelor si curentul ce intra ın borne.
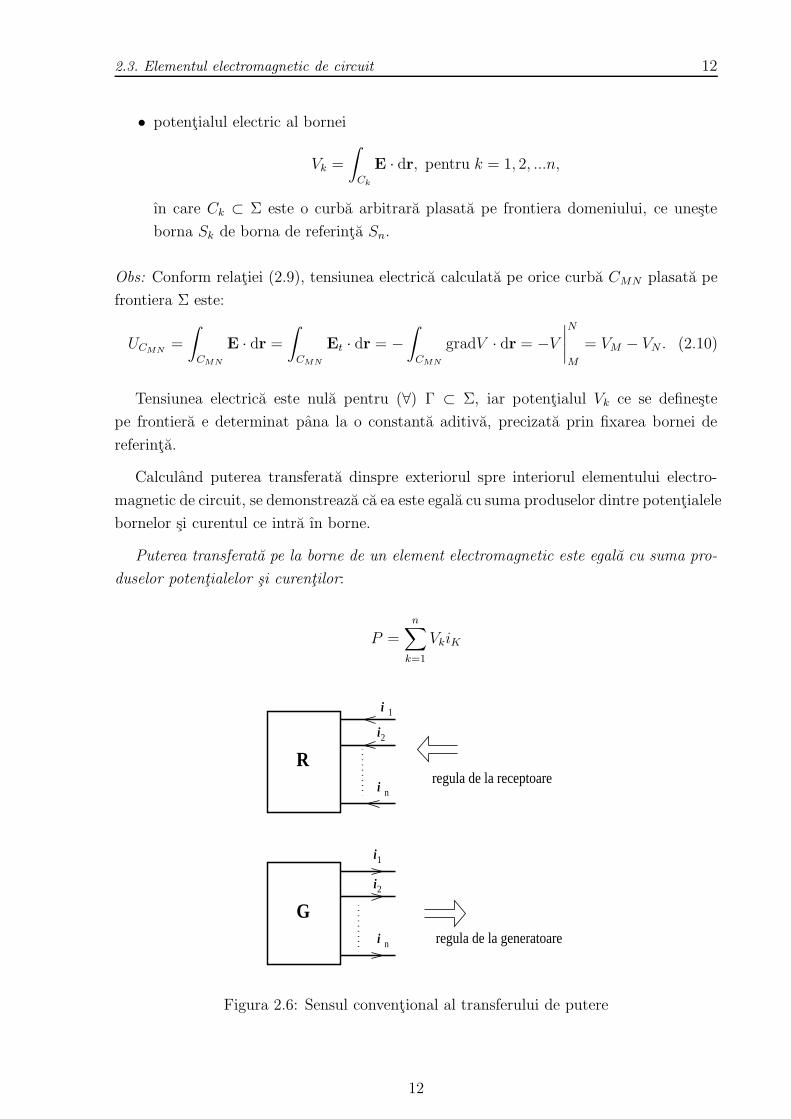
Puterea transferata pe la borne de un element electromagnetic este egala cu suma pro-
duselor potentialelor si curentilor:
P =n∑
k=1
VkiK
i 1
i2
i1
i2
i n
G
Ri n
regula de la generatoare
regula de la receptoare
Figura 2.6: Sensul conventional al transferului de putere
12

2.4. Formularea problemelor Codestar 13
2.4 Formularea problemelor Codestar
Formularea corecta, din punct de vedere matematic, a problemelor de camp Codestar se
bazeaza pe teoria elementului electromagnetic de circuit reamintita ın paragraful anterior.
Datele problemei sunt deci:
• domeniul de calcul;
• proprietatile de material;
• conditiile de frontiera.
In plus, ın cazul problemelor Codestar nu exista nici surse interne, nici conditii initiale
de camp.
Din punct de vedere al rezultatelor, intereseaza mai multe aspecte:
• relatia dintre potentialul la borne si curenti (descrise de functii ale circuitului ca
impedanta Z, admitanta Y sau parametrul de ımprastiere S), pentru acesta din
urma fiind disponibili si rezultatele experimentale;
• sistemul ecuatiilor de stare:
Cdxdt
= −Gx + Bu
y = ETx + Fu(2.11)
ın care C, G, B, E, F sunt matrici de stare, u este vectorul marimilor de intrare
iar y este vectorul marimilor de iesire. Marimile de intare si de iesire sunt exclusiv
potentialele bornelor si curentii ce le strabat.
• circuitul echivalent cu parametrii concentrati care aproximeaza la frecvente joase
comportarea dispozitivului;
• campurile electric si magnetic, puterea si densitatea de energie pentru diferite excitatii
ale dispozitivului, analizate ın domeniu timp si/sau frecventa.
Domeniul de calcul (figura 2.7) este considerat un domeniu rectangular 3D.
DΣ = (0, a) × (0, b) × (0, c) ∈ IR3,
construit ca o reuniune de n ”caramizi”:
DΣ =n⋃
j=1
DΣj, DΣj
= (x′j, x′′j ) × (y′j, y
′′j ) × (z′j, z
′′j ),
grupate ın straturi orizontale.
13

2.4. Formularea problemelor Codestar 14
yb
x
a
c
z v
i
S
C
nS
k
k
k
k
j
DΣ
DΣ
Figura 2.7: Domeniul de calcul
Campul electromagnetic ın DΣ se supune ecuatiilor lui Maxwell:
rotE = −∂B∂t
; rotH = J +∂D
∂t; (2.12)
divB = 0; divD = ρ; (2.13)
J = σE; D = εE; B = µH, (2.14)
care are ca necunoscute variabilele de camp:
E, D, B, H, J : DΣ × [0, tmax) → IR3,
ρ : DΣ × [0, tmax) → IR.
Materialele dispozitivului analizat sunt presupuse liniare si izotrope, caracterizate de
urmatoarele trei functii constante ın timp, definite pe domeniul DΣ:
• conductivitatea σ : DΣ → IR;
• permitivitatea electrica ε : DΣ → IR;
• permeabilitatea magnetica µ : DΣ → IR;
Cum nu ıntotdeauna conteaza toate cele trei proprietati ale materialului (electrica,
magnetica, de conductie), se introduce o constanta de calcul εc, µc si respectiv σc care
este 0 atunci cand proprietatea de material corespunzatoare nu este relevanta si 1 ın caz
contrar. Astfel, ın fiecare caramida k, aceste functii au o valoare constanta:
• σ = σc · σk ≥ 0, σc =
0 Perfect
1 Real, σk ≥ 0, k = 1, n;
• ε = εc · εk ≥ 0, εc =
0 Perfect
1 Real, εk ≥ ε0, k = 1, n;
• µ = µc · µk ≥ 0, µc =
0 Perfect
1 Real, µk ≥ µ0, k = 1, n.
14

2.4. Formularea problemelor Codestar 15
Pentru a asigura compatibilitatea conditiilor pentru problemele cuplate camp-circuit,
sunt impuse conditiile de frontiera ale elementului electromagnetic de circuit:
1. este interzis cuplajul magnetic ıntre interiorul si exteriorul frontierei Σ:
n · B = 0;
2. se neglijeaza curentul total prin suprafata laterala Sl:
n · (J +∂D
∂t) = 0;
3. fiecare terminal Sk este echipotential:
n × E = 0.
Daca numerotam terminalele astfel ıncat primele m terminale sunt alimentate ın ten-
siune, iar restul (n−m− 1) sunt alimentate ın curent, atunci:
• semnalele de intrare (sursele de camp) sunt:
vk =
∫
Ck⊂Σ
E · dr, k = 1, · · · , m;
ik =
∫
∂Sk
H · dr, k = m + 1, · · · , n− 1;
• iar semnalele de iesire sunt:
ik =
∫
∂Sk
H · dr, k = 1, · · · , m;
vk =
∫
Ck⊂Σ
E · dr, k = m + 1, · · · , n− 1.
In acest caz, vectorii u (de intrare) si y (de iesire) din (2.11) sunt:
u =
v1
· · ·vm
im+1
· · ·in−1
si y =
i1
· · ·im
vm+1
· · ·vn−1
(2.15)
Atat vectorul de intrare cat si vectorul de iesire sunt functii de timp
u, y:[0, tmax) → IRn−1.
15
Capitolul 3
Analiza numerica a campului
electromagnetic prin metoda
integrarilor finite
In acest capitol se va face o scurta prezentare a metodei integrarilor finite (Finite Inte-
gration Technique - FIT) si a modului ın care aceasta poate fi aplicata pentru a rezolva
diferite probleme de camp electromagnetic.
3.1 Metoda integrarilor finite
Metoda integrarilor finite este o metoda numerica folosita ın rezolvarea problemelor de
camp bazata pe:
• formele globale ale ecuatiilor Maxwell scrise pentru doua retele de discretizare duale;
• marimile globale de camp (tensiuni, fluxuri, curenti si sarcini) sunt grade de liber-
tate. Ele sunt asociate elementelor geometrice ale retelei (nod, latura, fata, celula)
si sunt componente ale campului electric sau magnetic, ın functie de regimul ın care
este studiata problema;
Vom considera o discretizare a domeniului de calcul obtinuta cu ajutorul unui grid
ortogonal tridimensional. Vom numi aceasta discretizare retea primara G si vom consid-
era si o discretizare duala a domeniului, notata G ′, care are ca noduri ale retelei centrul
celulelor primei retele (fig.3.1). Intre elementele geometrice ale celor doua retele de dis-
cretizare exista relatii mutuale de dualitate, exceptie facand celulele de frontiera, deoarece
reteaua secundara este trunchiata astfel ıncat celulele virtuale sa nu depaseasca domeniul
de calcul. Fiecare celula, fata, muchie, nod are asociat un element dual. Vom nota cu
16

3.1. Metoda integrarilor finite 17
y
x
z
Centrul celulei
Celula retelei primare
Celula retelei secundare
Figura 3.1: Discretizarea domeniului ın FIT
N si L numarul de noduri, respectiv laturi ale gridului primar si cu N ′, L′ numarul de
noduri si de laturi corespunzatoare gridului dual.
Necunoscutele principale ale metodei (gradele de libertate ın FIT) sunt:
• tensiunile electrice asociate muchiilor celulei retelei primare (fig.3.2) reunite ıntr-un
vector:
u = (uxl|uyl|uzl)Tl=1,··· ,N ∈ IRL, L = 3N ;
• fluxurile magnetice asociate fetelor celulei retelei primare (fig.3.2):
ϕ = (ϕxl|ϕyl|ϕzl)Tl=1,··· ,N ∈ IRL′
, L′ = 3N ′;
U z (i+1,j,k)
(i,j,k)Ux
z (i,j,k+1)ϕ
y (i,j+1,k)ϕ
U x (i,j+1,k)
U y (i+1,j,k)
x (i,j,k+1)U
(i,j,k)zϕ
y (i,j,k)ϕ
U y (i,j,k+1)
xy
z
Figura 3.2: Celula retelei primare
• tensiunile magnetice asociate celulei retelei secundare (fig. 3.3):
um = (umxl|umyl|umzl)Tl=1,··· ,N ′ ∈ IRL′
, L′ = 3N ′;
• fluxurile electrice asociate laturilor celulei retelei secundare (fig. 3.3):
ψ = (ψxl|ψyl|ψzl)Tl=1,··· ,N ′ ∈ IRL′
, L′ = 3N ′;
17

3.1. Metoda integrarilor finite 18
(i,j,k+1)u mx
x (i,j,k)i
(i,j,k)q
xy
z
(i+1,j,k)
(i,j+1,k)
(i,j,k+1)
(i,j,k+1)
(i,j+1,k)
(i+1,j,k)my
myuz
y
mzu
z(i,j,k)
(i,j,k)
u
umx
(i,j,k)yi
i
i
i
Figura 3.3: Celula retelei secundare
• curentii electrici asociati laturilor celulei retelei secundare (fig. 3.3):
i = (ixl|iyl|izl)Tl=1,··· ,N ′ ∈ IRL′
, L′ = 3N ′;
• sarcinile electrice asociate laturilor celulei retelei secundare (fig. 3.3):
q = (ql)Tl=1,··· ,N ′ ∈ IRN ′
.
Forma discreta a primei ecuatii a lui Maxwell:
rotE = −∂B∂t, (3.1)
se obtine prin aplicarea formei integrale a legii inductiei electromagnetice:
∫
∂S
E · dr = − d
dt
∫
S
B · dA, (∀)S (3.2)
fiecarei fete a retelei primare G (fig.3.4):
[−1 · · · 1 · · ·1 · · · − 1]
u1
· · ·u2
· · ·u3
· · ·u4
= − d
dt
· · ·ϕ1
· · ·
. (3.3)
O consecinta este aceea ca ecuatia (3.2) este valabila de-a lungul oricarei curbe ınchise
formata din reuniunea muchiilor retelei primare.
Grupand toate cele L′ ecuatiile diferentiale de tipul (3.3) ıntr-o ecuatie compacta, se
va obtine forma discreta a ecuatiei lui Maxwell (3.1):
18

3.1. Metoda integrarilor finite 19
u
uu
u
1
2
34 ϕ1
Figura 3.4: O fata a retelei primare
Cu = −dϕ
dt, (3.4)
ın care C ∈ ZL′×L este operatorul discret rotor pe G.
Pentru a obtine forma discreta a celei de-a doua ecuatii a lui Maxwell:
rotH = J +∂D
∂t, (3.5)
forma integrala a legii circuitului magnetic:
∫
∂S
H · dr =
∫
S
(
J +∂D
∂t
)
· dA, (∀)S (3.6)
va fi aplicata fiecarei fete a retelei secundare G ′ (fig.3.5):
[1 · · ·1 · · · − 1 · · · − 1]
um1
· · ·um2
· · ·um3
· · ·um4
=
· · ·i1
· · ·
+
d
dt
· · ·ψ1
· · ·
. (3.7)
O consecinta rezultata imediat este ca ecuatia (3.6) va fi valabila pe orice curba ınchsa
formata din reuniunea muchiilor retelei secundare.
Reunind cele L ecuatii diferentiale de tipul (3.7) intr-o ecuatie compacta se va obtine
urmatoarea relatie matriceala:
C′u = i +dΨ
dt, (3.8)
reprezentand forma discreta a ecuatiei lui Maxwell (3.5) ın care C′ ∈ ZL×L′
este opera-
torul discret rotor pe G ′.
19
3.1. Metoda integrarilor finite 20
u Ψ u
u
u
m4i
m1
m3
m2
1 1
Figura 3.5: O fata a retelei secundare
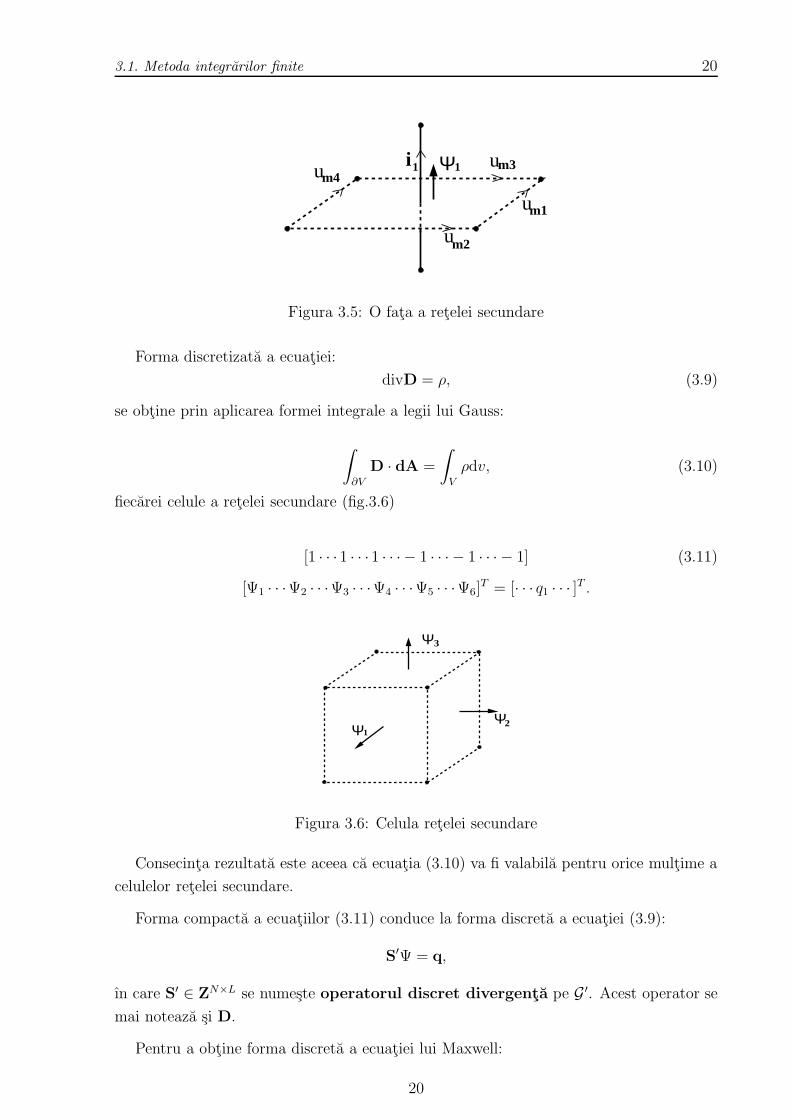
Forma discretizata a ecuatiei:
divD = ρ, (3.9)
se obtine prin aplicarea formei integrale a legii lui Gauss:
∫
∂V
D · dA =
∫
V
ρdv, (3.10)
fiecarei celule a retelei secundare (fig.3.6)
[1 · · ·1 · · · 1 · · · − 1 · · · − 1 · · · − 1] (3.11)
[Ψ1 · · ·Ψ2 · · ·Ψ3 · · ·Ψ4 · · ·Ψ5 · · ·Ψ6]T = [· · · q1 · · · ]T .
Ψ
ΨΨ
1
3
2
Figura 3.6: Celula retelei secundare
Consecinta rezultata este aceea ca ecuatia (3.10) va fi valabila pentru orice multime a
celulelor retelei secundare.
Forma compacta a ecuatiilor (3.11) conduce la forma discreta a ecuatiei (3.9):
S′Ψ = q,
ın care S′ ∈ ZN×L se numeste operatorul discret divergenta pe G ′. Acest operator se
mai noteaza si D.
Pentru a obtine forma discreta a ecuatiei lui Maxwell:
20

3.1. Metoda integrarilor finite 21
divB = 0, (3.12)
forma integrala a legii Dirac:∫
∂V
B · dA = 0, (3.13)
va fi aplicata fiecarei celule a retelei primare (fig.3.7):
[1 · · ·1 · · · 1 · · · − 1 · · · − 1 · · · − 1] (3.14)
[ϕ1 · · ·ϕ2 · · ·ϕ3 · · ·ϕ4 · · ·ϕ5 · · ·ϕ6]T = 0.
ϕ
ϕ3
2
ϕ1
Figura 3.7: Celula retelei primare
Consecinta imediata este ca ecuatia (3.12) va fi valabila pe orice suprafata ınchisa
formata din fetele celulelor retelei primare.
Forma discreta rezultata este:
Sϕ = 0 (3.15)
ın care S ∈ ZN ′×L′
se numeste operatorul discret divergenta pe G. Operatorul mai
este notat si D.
In concluzie, formele discrete ale ecuatiilor lui Maxwell obtinute prin metoda in-
tegrarilor finite sunt:
Cu = −dϕdt
; DΨ = q;
C′um = i + dΨdt
; D′ϕ = 0,
(3.16)
Aceste relatii sunt exacte, iar absenta erorii de discretizare ın ecuatiile fundamentale
de discretizare ale lui Maxwell este un argument puternic ın favoarea metodei FIT, atunci
cand este comparata cu alte metode numerice. In final aceste ecuatii se asambleaza ıntr-un
sistem, iar ın urma rezolvarii ecuatiilor se obtine caracteristica de frecventa.
Pentru a putea fi rezolvata, o problema de camp electromagnetic are nevoie, ın afara
de ecuatiile lui Maxwell, de relatii constitutive care sa descrie comportarea materialelor.
21

3.1. Metoda integrarilor finite 22
Aceste relatii sunt exacte doar ın forma lor locala, deoarece ın forma globala, rezultatele
sunt afectate de erorile de aproximare.
Pornind de la forma locala a legii lui Ohm:
J = σE, (3.17)
si folosind urmatoarea integrala de aproximare a tensiunii:
uk =
∫
Ck
E · dr = Eklk +O(l3k), (3.18)
unde Ek este componenta tangentiala a campului electric, curentul electric ce strabate
suprafata Sk (fig.3.8) este:
σ σ
σ
ε ε
εσ ε
A
A A
A
1 1 2 2
1 2
34
4 4 3 3
Ik
Sk
Figura 3.8: Celulele retelei primare
ik =
∫
Sk
J · dA =4∑
j=1
∫
σjEj · dA =4∑
j=1
σjAjEj +O(l3k) (3.19)
ik =
(
1
lk
4∑
j=1
σjAj
)
uk +O(l2k)∼= Mσykuk
Neglijand eroarea de discretizare, relatia dintre variabilele globale este:
ik = Mσyk · uk, (3.20)
ın care conductanta ik/uk asociata oricarei laturi k este:
Mσyk =1
lk
4∑
j=1
σjAj. (3.21)
Urmarind aceeasi metoda, dar pornind de la forma locala a relatiei
D = εE, (3.22)
22
3.1. Metoda integrarilor finite 23
se obtine urmatoarea relatie de aproximare:
Ψk = Mεykuk, (3.23)
unde capacitatea Ψk/uk asociata oricarei laturi k este:
Mεyk =1
lk
4∑
j=1
εjAj, (3.24)
si Ψk este fluxul electric ce strabate suprafata Sk.
Pornind de la forma locala a legaturii dintre inductia magnetica si intensitatea campului
magnetic:
B = µH, (3.25)
si aplicand relatia de discretizare:
ϕky =
∫
Sk
B · dA = BykAyk +O(Ak), (3.26)
se obtine relatia tensiunii magnetice de-a lungul muchiei retelei secundare:
umk =
∫
Ck
H · dr = Hy1 + l1 +Hy2l2 +O(L3k) ≈
1
Ak
(
l1µ1
+l2µ2
)
ϕky, (3.27)
daca By1 = µ1Hy1 si By2 = µ2Hy2.
Relatia dintre variabilele globale este:
umk = Mνyk · ϕk, (3.28)
ın care
Mνyk =1
Ak
2∑
j=1
ljµj
(3.29)
este reluctanta magnetica umk/ϕk sau o relatie echvalenta:
ϕk = Mµykumk, (3.30)
unde Mµyk = 1/Mνyk este inversul reluctantei magnetice ϕk/umk.
In final se obtin trei matrice simetrice, pozitiv definite de forma:
Mσ = Diag(Mσxk|Mσyk|Mσzk)k=1···N ∈ IR3N (3.31)
Mε = Diag(Mεxk|Mεyk|Mεzk)k=1···N ∈ IR3N (3.32)
Mµ = Diag(Mµxk|Mµyk|Mµzk)k=1···N ∈ IR3N ′
(3.33)
si relatiile constitutive:
i = Mσu (3.34)
Ψ = Mεu (3.35)
23

3.2. Modele cu parametrii concentrati 24
um = Mνϕ⇔ ϕ = Mµum (3.36)
Cele trei matrice diagonale sunt operatorii discreti Hodge, ın care se gasesc erorile de
discretizare de ordinul O(l3) ın cazul unei retele de discretizare uniforme si O(l2) ın cazul
unei retele neuniforme. Acestea contin informatii legate de material si de demensiunile
retelei de discretizare. Eroarea de discretizare se afla ın ecuatiile de material constitutive.
Pentru a determina operatorii Hodge se ia ca punct de referinta, pnctul de intersectie
dintre o fata si muchia duala acesteia. Campurile, ın acest punct, sunt aproximate de
media fortelor de-a lungul muchiei si de media densitatii de flux ce strabate suprafata.
In cazul retelei uniforme, punctul de intersectie coincide cu centrul intersectiei a dous
entitati geometrice. De aceea, valorile medii ele campului sunt aprximate cu valorile din
centrul elementelor geometrice, iar valoarea erorii de discretizare este mai mica decat ın
cazul unei retele de discretizare neuniforme. In cazul materialelor omogene se prefera
retelele de discretizare uniforme, datorita erorilor mai mici.
3.2 Modele cu parametrii concentrati
La frecvente scazute, modelele cu parametrii concentrati pot furniza informatii precise
despre comportarea elementului pasiv studiat. De aceea, ın acest subcapitol vom exem-
plifica modul de obtinere a matricelor R, L, C folosind metoda integrarilor finite ın cazul
unor modele de circuite cu parametrii concentrati.
Analiza modelelor cu parametrii concentrati se face ın regim stationar. In functie de
regimul studiat, marimea de calcul εc, µc sau σc va fi aleasa 0.
3.2.1 Modelul rezistiv cu parametrii concentrati
In regim electrocinetic stationar, permitivitatea si permeabilitatea de calcul sunt nule
(deci εc = 0, µc = 0), singurul parametru nenul fiind conductivitatea σ.
Aplicand analiza numerica a campului electric pentru valori cunoscute ale potentialelor
terminalelor: vb = [vb1 , vb2 , · · · , vbn−1]T , se obtine distributia potentialului nodurilor in-
terne:
v = [v1, v2, · · · , vN ]T . (3.37)
Puterea electrica disipata poate fi calculata ın functie de potentialele nodurilor si
conductantele Gl ale laturilor:
P =
L∑
k=1
Glk(vki − vkf)2, (3.38)
ın care ki este nodul initial, iar kf este nodul final al laturii k.
24

3.2. Modele cu parametrii concentrati 25
Curentii terminalelor ib = [ib1 , · · · , ibn−1]T depind liniar de potentialele terminalelor
prin relatia:
ib = Gvb, (3.39)
ın care G este matricea simetrica si pozitiv definita a conductantelor terminalelor.
Puterea transferata prin terminale:
P = vTb ib = vTb Gvb (3.40)
este egala cu puterea disipata ın interiorul retelei echivalente si depinde de patratul
potentialelor terminalelor. Din punct de vedere al terminalelor, modelul cu parametrii
concentrati este descris complet, ın acest regim, de matricea G care face legatura ıntre
semnalele de intrare vb si semnalele de iesire ib.
Pentru a determina cele n+ n(n− 1)/2 elemente independente ale matricei G, se vor
face tot atatea analize numerice ın care se va calcula puterea disipata cu formula (3.38).
In n din aceste analize se excita cate o singura borna, restul fiind puse la pamant, iar ın
n(n− 1)/2 analize se excita cate doua borne distincte, restul fiind la pamant.
Daca excitatia este vb = [0, · · · , 1, · · ·0]T , deci doar terminalul j este excitat cu v0 = 1,
iar celelalte terminale sunt puse la pamant, atunci puterea este numeric egala cu:
Pjj = Gjjv20 = Gjj. (3.41)
In consecinta elementele de pe diagonala matricei G pot fi calculate, excitand pe rand
terminalele j = 1, 2, ..., n− 1.
Daca sunt excitate simultan terminalele j si k (cu j 6= k) cu potentialele vbj = vbk =
vo = 1, celelalte terminale fiind conectate la pamant, atunci vb = [0, · · · 1, 0, · · ·1, 0, · · · ]T ,
iar puterea consumata este:
Pjk = (Gjj +Gkk + 2Gjk)v20, (3.42)
ceea ce duce la determinarea elementelor nediagonale ale matricei G:
Gkj = Gjk = (Pjk − Pjj − Pkk)/2. (3.43)
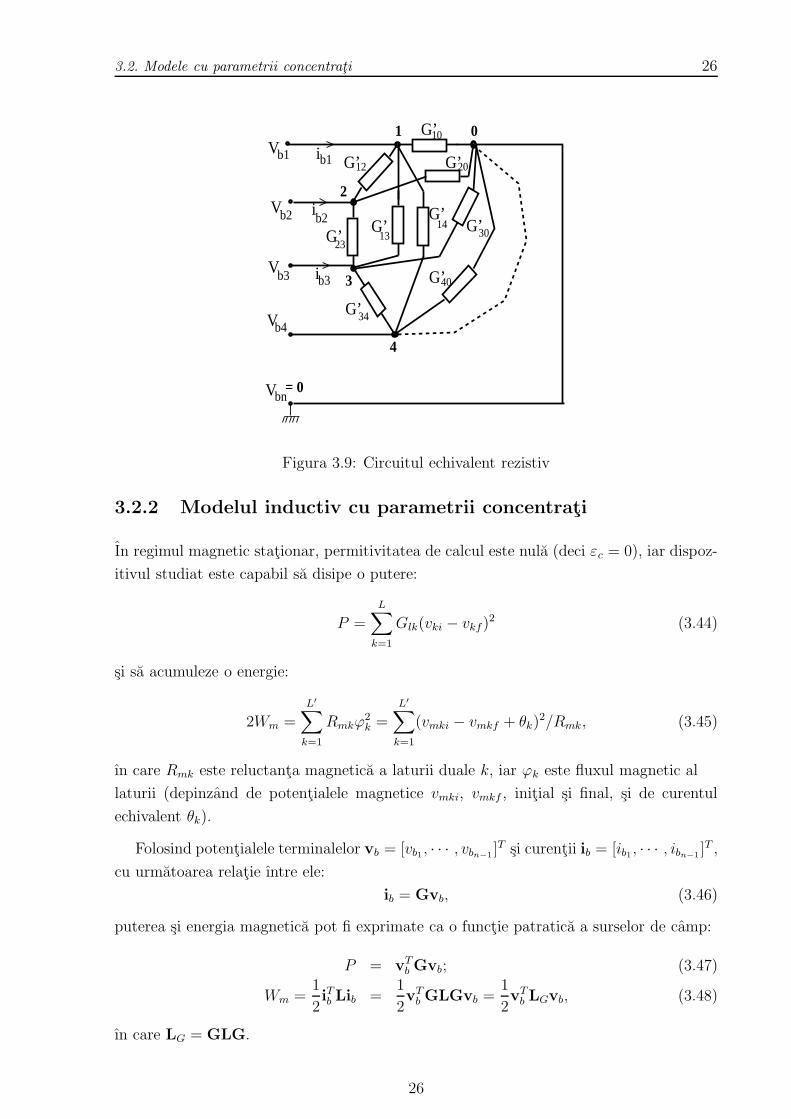
Matricea G astfel obtinuta corespunde unui circuit echivalent al dispozitivului analizat,
ca cel din figura 3.9. Intre cele n terminale graful circuitului este un poligon complet.
Conductanta G′kj a rezistorului conectat ıntre terminalele j si k este −Gkj, iar elementul
Gkk, de pe diagonala matricei G, este egal cu suma G′k1+· · ·+G′
k,k−1+G′k0+G′
k,k+1+· · ·+G′k,n−1, ın care G′
k0 este conductanta rezistorului conectat ıntre terminalul k si pamant
(fig.3.9). Daca domeniul nu este peste tot un conductor, matricea G poate fi singulara,
deoarece o parte dintre aceste conductante G′kj pot fi nule. Din acesta cauza se evita
excitatia ın curent a dispozitivului.
25
3.2. Modele cu parametrii concentrati 26
Vbn= 0
Vb3
Vb2
Vb4
Vb1
34G’
23G’
12G’
10G’
20G’
13G’ 14
G’
40G’
G’30
b1i
ib2
ib3
1
2
0
3
4
Figura 3.9: Circuitul echivalent rezistiv
3.2.2 Modelul inductiv cu parametrii concentrati
In regimul magnetic stationar, permitivitatea de calcul este nula (deci εc = 0), iar dispoz-
itivul studiat este capabil sa disipe o putere:
P =
L∑
k=1
Glk(vki − vkf)2 (3.44)
si sa acumuleze o energie:
2Wm =L′
∑
k=1
Rmkϕ2k =
L′
∑
k=1
(vmki − vmkf + θk)2/Rmk, (3.45)
ın care Rmk este reluctanta magnetica a laturii duale k, iar ϕk este fluxul magnetic al
laturii (depinzand de potentialele magnetice vmki, vmkf , initial si final, si de curentul
echivalent θk).
Folosind potentialele terminalelor vb = [vb1 , · · · , vbn−1]T si curentii ib = [ib1 , · · · , ibn−1
]T ,
cu urmatoarea relatie ıntre ele:
ib = Gvb, (3.46)
puterea si energia magnetica pot fi exprimate ca o functie patratica a surselor de camp:
P = vTb Gvb; (3.47)
Wm =1
2iTb Lib =
1
2vTb GLGvb =
1
2vTb LGvb, (3.48)
ın care LG = GLG.
26

3.2. Modele cu parametrii concentrati 27
Presupunand ca matricea G este una nesingulara si ca R = G−1 este inversa ei (ma-
tricea simetrica si pozitiv definita a rezistentelor terminalelor), matricea inductantelor
poate fi calculata cu urmatoarea relatie:
L = RLGR (3.49)
Circuitul echivalent cu parametrii concentrati care are acelasi comportament, ın regim
stationar, pentru diferite potentiale aplicate terminalelor (absoarbe curent si energie mag-
netica), este format din (n − 1) bobine cuplate, strabatute de curentii ib1 , ib2 , · · · , ibn−1
(fig.3.10). Matricea inductivitatilor proprii si mutuale ale acestor bobine este L.
ib
1vb
v1
v2L22ibvb
vb 3v3
b nv = 0 ib n
ib
33L
G’12 G’20
G’3023G’
n−1,0G’
G’n−1,n
vn−1vbn−1
Ln−1,n−1
1ib
L1112L =L21 G’10
22
n−1
u1
un−1
Figura 3.10: Circuitul echivalent RL
Daca v = [v1, · · · , vn−1]T este vectorul potentalelor terminalelor partii rezistive si u =
[u1, · · · , un−1]T este vectorul tensiunilor aplicate bobinelor cuplate, rezulta ca:
u = vb − v = Ld ibd t
; (3.50)
v = Rib. (3.51)
Ecuatia de stare a sistemului este:
Ld ibd t
= −Rib + vb, (3.52)
unde vb este semnalul de intrare, si ib este semnalul de iesire si variabila de stare, ın acelasi
timp.
Inlocuind ın ecuatia (3.16) ib = Gv, se obtine urmatoarea forma echivalenta a ecuatiei
de stare:
LGdv
d t= −v + vb, (3.53)
27

3.2. Modele cu parametrii concentrati 28
unde, acum, variabila de stare este vectorul potentialelor v, iar semnalele de iesire sunt
ib = Gv.
Aceste rezultate sunt valabile numai daca graful este conex ın partea rezistiva. In acest
caz matricea G este inversabila.
Daca partea rezistiva este formata din m circuite disjuncte, fiecare circuit fiind conex
(fig.3.11), atunci matricea G are o structura diagonala ca ın figura 3.12, ın care matri-
cile patratice G1,G2, ...,Gm sunt matrice simetrice si pozitiv definite si sunt matricele
conductantelor subcircuitelor conexe.
G2
G112n1
n1+1n1+2
(n−1)Gm
Figura 3.11: Circuitul rezistiv cu m blocuri conexe
G
G
G0
0G=
1
2
m
Figura 3.12: Matricea conductantelor
In acest caz cei (n− 1) curenti ai terminalelor nu sunt independenti, deoarece pentru
fiecare bloc conex suma curentilor trebuie sa fie zero:
∑
k∈Bj
ik = 0, j = 1, 2, · · ·m. (3.54)
In consecinta, numarul de curenti independenti este (n−m), iar vectorul acestora va fi
notat cu iL. Avand ın vedere ca matricea L a inductantelor are marimea (n−m), rezulta
expresia energiei magnetice:
Wm =1
2iTLLiL. (3.55)
Vectorul redus al curentilor (iL) poate fi exprimat ca un produs ıntre matricea conductantelor
Gr = diag(G1,G2, · · · ,Gm) si vectorul potentialelor vr = [v1, v2, · · · , vn−m]T :
iL = Grvr. (3.56)
28

3.2. Modele cu parametrii concentrati 29
I
P=0
0
I
−1...−1
−1...−1
0
, S=
I
0
00
I
I
I
Figura 3.13: Structura matricelor P si S
Daca notam Lg = GrLGr, rezulta urmatoarea expresie a energiei magnetice:
Wm =1
2vTr GrLGrvr =
1
2vTr Lgvr. (3.57)
Deoarece matricea Gr este formata din matrice nesingulare, inversa lor este:
Rr = diag(G−11 ,G−1
2 , · · · ,G−1m ), (3.58)
iar matricea inductivitatilor proprii si mutuale va fi:
L = RrLgRr. (3.59)
Ecuatia de stare va fi de forma:
Ld iLd t
= −RriL + Pvb (3.60)
ib = SiL, (3.61)
unde P este matricea topologica de marime (n−m)×n, obtinuta din matricea unitate de
marime (n×n), prin eliminarea a m linii corespunzatoare curentilor dependenti. Matricea
S este de asemenea o matrice topologica, de marime (n−1)×(n−m), obtinuta din matricea
unitate de marime (n −m) × (n−m) adaugand linii de −1 ın pozitiile corespunzatoare
curentilor dependenti (fig.3.13).
3.2.3 Modelul capacitiv cu parametrii concentrati
In regimul cuasistationar, permeabilitatea de calcul este nula (deci µc = 0), dar conduc-
tivitatea si permitivitatea de calcul sunt nenule (σc 6= 0, respectiv εc 6= 0). Potentialul
electric este determinat de distributia curentului, care depinde de σ, ın conductoare si de
ε, ın zona izolanta.
Puterea electrica disipata este:
P =
L∑
k=1
Glk(vki − vkf)2, (3.62)
29

3.2. Modele cu parametrii concentrati 30
iar energia electrica acumulata este:
We =1
2
L∑
k=1
Clk(vki − vkf )2. (3.63)
Curentii absorbiti de terminale, la frecvente relativ scazute, au o componenta conduc-
tiva si una capacitiva:
ib = Gvb + Cdvbdt
, (3.64)
iar din formula puterii transferate pe la borne Pt = vTb ib, rezulta componenta disipata si
componenta corespunzatoare energiei electrice:
P = vTb Gvb; (3.65)
We =1
2vTb Cvb; (3.66)
Pe =dWe
d t. (3.67)
Presupunem ca semnalele de intrare si semnalele de iesire sunt curentii, respectiv
potentialele terminalelor (si de asemenea variabile de stare). Atunci, ecuatia variabilelor
de stare devine:
Cdvbd t
= −Gvb + ib. (3.68)
Pentru a calcula matricele G si C, se aplica terminalului j = 1, 2, · · · , n−1 un potential
vj = v0 = 1, iar celelalte terminale sunt puse la pamant. Din formulele:
Pjj = Gjjv20, Wjj = Cjj
v20
2, (3.69)
se determina componentele diagonale ale matricelor.
Daca se excita terminalele k si j cu potentialul v0 = 1:
Pkj = (Gkk +Gjj + 2Gkj)v20, (3.70)
Wkj = (Ckk + Cjj + 2Ckj)v20
2. (3.71)
se pot determina componentele nediagonale ale matriceleor:
Gkj =
(
Pkjv20
−Gkk −Gjj
)
/2, (3.72)
Ckj =
(
2Wkj
v20
− Ckk − Cjj
)
/2. (3.73)
Circuitul echivalent al dispozitivului analizat, ın regim cuasistationar, este format din
condensatoare conectate ın paralel cu rezistoare (fig.3.14). Intre cele n terminale, graful
circuitului este un poligon complet .
30

3.2. Modele cu parametrii concentrati 31
ib
vb
vb ib
C12
C23 13C
ibv = b n
ibvb
G
ib
12
G233
2bv
1
2
1
3G13
G10n
0
n−1n−1
GC10Cn−1,0 n−1,0
Figura 3.14: Circuitul echivalent RC
3.2.4 Modele de circuite RLC cu parametrii concentrati
Presupunem ca toate constantele de material sunt nenule (σc 6= 0, εc 6= 0, µc 6= 0). In
consecinta vor fi trei probleme de camp ın regimurile: electrocinetic, electrostatic si meg-
netic stationar. Solutia problemei electrocinetice determina conditiile de frontiera a prob-
lemei electrostatice si sursele interne de camp ale problemei magnetic stationare.
Solutiile celor trei probleme conduc la:
• puterea disipata:
P =
L∑
k=1
Glk(vki − vkf)2; (3.74)
• energia electrica:
We =1
2
L∑
k=1
Clk(vki − vkf)2; (3.75)
• energia magnetica:
Wm =1
2
L′
∑
k=1
Rmkϕ2k. (3.76)
Generalizand rezultatele obtinute ın subcapitolul anterior ın care matricea G este o
matrice nesingulara se obtine diagrama echivaleta ca ın figura 3.15 sau ca ın figura 3.16.
Cele doua circuite au acelasi comportament ın regim stationar si aproximativ acelasi
comportament la frecventa joasa, dar ın timp ce primul are o un comportament inductiv
atunci cand frecventa creste (Z → ∞ cand ω → ∞), al doilea circuit echivalent are un
comportament capacitiv (Z → 0 cand ω → ∞).
31
3.2. Modele cu parametrii concentrati 32
ib3vb3
vb2
ib2L 22
L 33
12Lv
b1
L11
12G’
v1
v2
v3
G’23
C12
C23 G’13 C13
bn 0v =
ib1
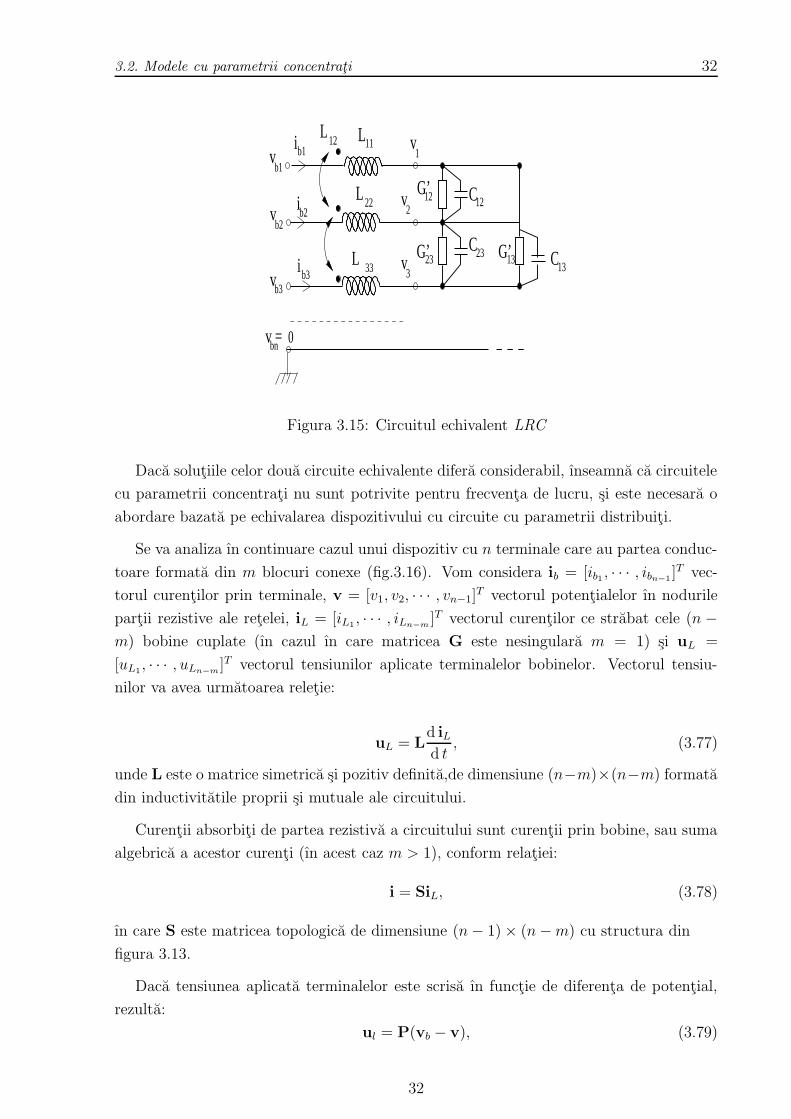
Figura 3.15: Circuitul echivalent LRC
Daca solutiile celor doua circuite echivalente difera considerabil, ınseamna ca circuitele
cu parametrii concentrati nu sunt potrivite pentru frecventa de lucru, si este necesara o
abordare bazata pe echivalarea dispozitivului cu circuite cu parametrii distribuiti.
Se va analiza ın continuare cazul unui dispozitiv cu n terminale care au partea conduc-
toare formata din m blocuri conexe (fig.3.16). Vom considera ib = [ib1 , · · · , ibn−1]T vec-
torul curentilor prin terminale, v = [v1, v2, · · · , vn−1]T vectorul potentialelor ın nodurile
partii rezistive ale retelei, iL = [iL1, · · · , iLn−m
]T vectorul curentilor ce strabat cele (n −m) bobine cuplate (ın cazul ın care matricea G este nesingulara m = 1) si uL =
[uL1, · · · , uLn−m
]T vectorul tensiunilor aplicate terminalelor bobinelor. Vectorul tensiu-
nilor va avea urmatoarea reletie:
uL = Ld iLd t
, (3.77)
unde L este o matrice simetrica si pozitiv definita,de dimensiune (n−m)×(n−m) formata
din inductivitatile proprii si mutuale ale circuitului.
Curentii absorbiti de partea rezistiva a circuitului sunt curentii prin bobine, sau suma
algebrica a acestor curenti (ın acest caz m > 1), conform relatiei:
i = SiL, (3.78)
ın care S este matricea topologica de dimensiune (n− 1) × (n−m) cu structura din
figura 3.13.
Daca tensiunea aplicata terminalelor este scrisa ın functie de diferenta de potential,
rezulta:
ul = P(vb − v), (3.79)
32

3.2. Modele cu parametrii concentrati 33
C12
ib2
G’13
L22
L12
C23
G’23
G’12
C31
ib3
ib1 i1 v1
v2i2
v3i3L
33v
b3
vb2
vb1
bnv = 0
11L
Figura 3.16: Circuitul echivalentCLR
ın care P reprezinta matricea topologica de dimensiune (n−m)×(n−1) a carei structura
este reprezentata ın figura 3.13.
Curentii absorbiti de terminalele circuitului sunt:
ib = Cdvbd t
+ i = Cdvbd t
+ SiL, (3.80)
iar curentii prin bobine, fiind o parte din curentii absorbiti de partea rezistiva a circuitului,
pot fi determinati cu relatia:
iL = GrPv, (3.81)
unde Gr = diag(G1,G2, · · · ,Gm) este o matrice simetrica si pozitiv definita.
In concluzie, ecuatiile de stare sunt de forma:
Cdvbd t
= −SiL + ib, (3.82)
Ld iLd t
= −Pvb − G−1r iL, (3.83)
ib = SiL, (3.84)
sau scrise sunb forma matriciala:[
C 0
0 L
]
d
dt
[
vb
iL
]
=
[
0 −S
P −Gr
][
vb
iL
]
+
[
ib
0
]
, (3.85)
de unde se observa ca semnalele de intrare sunt curentii ib ce sunt absorbiti de primele
(n−1) terminale, variabilele de stare sunt: potentalele vb aplicate primelor (n−1) termi-
nale si curentii prin cele (n−m) bobine cuplate, iar semnalele de iesire sunt potentialele
primelor (n− 1) terminale.
In regimul de stare stabil, circuitul echivalent are:
33

3.2. Modele cu parametrii concentrati 34
• puterea electrica:
P = vTGlv = vTb Gvb; (3.86)
• energia electrica:
2We = vTClv = vTb Cvb; (3.87)
• energia magnetica:
2Wm = iTLLiL = (Pib)TL(Pib) = (PGvb)
TL(PGvb) = vTb GPTLPGvb, (3.88)
deoarece ın acest regim uL = 0, atunci vb = v, ib = Gv = Gvb si iL = Pib.
In consecinta, elementele matricelor G, C, si L pot fi calculate daca valorile P , We,
Wm sunt cunoscute pentru cateva excitatii: cu potentialul v0 = 1 al terminalelor i si j
(i = 1, 2, · · · , n−1 si j = i, i+1, · · · , n−1) si vk = 0 aplicat terminalelor k = 1, 2, · · · , n−1,
k 6= i, k 6= j:
Pij = (Gii +Gjj + 2Gij)v20; (3.89)
2Weij= (Cii + Cjj + 2Cij)v
20; (3.90)
2Wmij= (Lgii
+ Lgjj+ 2Lgij
)v20, (3.91)
unde Lgijsunt elementele matricei simetrice si pozitiv definita:
Lg = GPTLPG = (PGPT )L(PGPT ) = GrLGr
PLgPT = GrLGr = LP ,
unde
Gr = PGPT
este matricea redusa a conductantelor nodale, simetrica, pozitiv definita si cu o structura
diagonala:
Gr = diag(G1,G2, · · · ,Gm),
ın care Gk reprezinta matricea conductantelor nodale, corespunzatoare blocului conex k.
Daca se inmulteste la stanga si la dreapta cu matricea rezistentelor blocurilor conexe
(R = G−1), se obtine inductivitatiilor proprii si mutuale:
L = RGrLGrR = RPLgPTR. (3.92)
In concluzie, din expresia 3.60, cunoscand matricea Wmij, se poate determina matricea
Lg, din care, prin eliminarea a (m−1) linii si (m−1) coloane (corespunzatoare terminalelor
dependente) rezulta matricea LP = PLgPT . Aceeasi operatie de eliminare se face si ın
cazul matricei G, rezultand astfel matricea Gr = PGPT , care prin inversare genereaza
matricea rezistentelor R. In final se calculeaza matricea L prin relatia 3.74.
34

3.2. Modele cu parametrii concentrati 35
Parametrii concentrati ale modeleor studiate ın diferite regimuri ale campului electro-
magnetic au forma generala:
Edx
d t= Ax + Bu (3.93)
y = Cx + Du, (3.94)
ın care u este vectorul semnalelor de intrare, y este vectorul semnalelor de iesire si x este
vectorul de stare.
35

Capitolul 4
Analiza numerica a campului
electromagnetic cu ASITIC
4.1 Prezentarea programului
ASITIC (”Analysis and Simulation of Inductors and Transformers in Integrated Circuits”)
este un program CAD ce permite proiectarea, analiza si modelarea comportarii electrice
si magnetice a structurilor metalice pasive plasate pe un substrat conductor cu pierderi,
ın special inductoare spiralate.
Programul poate fi folosit la proiectarea bobinelor si transformatoarelor pentru circuite
de microunde la frecvente ridicate. ASITIC permite si analiza cuplarii prin substrat,
calculul capacitatilor parazite, studiul efectului pelicular.
Programul ASITIC a fost dezvoltat de catre Ali M. Niknejad de la Universiatea Berke-
ley si este disponibil dupa completarea unui formular de ınregistrare la adresa [4].
Formatul datelor de intrare
Datele de intrare ale programului sunt:
• un fisier ın care sunt descrise datele tehnologice;
• specificarea elementelor de circuit ın maniera interactiva, prin linia de comanda.
Elementele disponibile sunt:
– spirala patrata (”square spiral”);
– spirala poligonala (”polygon spiral”);
– spirala patrata simetrica (”square symmetric spiral”);
36
4.1. Prezentarea programului 37
– spirala poligonala simetrica (”polygon symmetric spiral”);
– spirala compusa din conductoare patrate metalice ınseriate (”multi-metal-series
connected transformer”);
– transformator planar (”planar transformer”);
– fire conductoare cablate (”wire”);
– condensator metal-izolant-metal (”metal-insulator-metal”);
– treceri (”via”).
Structura fisierului de tehnologie
ASITIC primeste ca date de intrare un fisier de descriere a tehnologiei. Acest fisier contine
parametrii specifici de proces, cum ar fi grosimea straturilor si constantele lor de material.
In Anexa B este prezentat un astfel de fisier.
Fisierul de tehnologie este ımpartit ın subsectiuni. Prima subsectiune ıncepe cu declaratia
<chip>. Primele doua linii definesc dimensiunile x si y ale chip-ului.
Urmatorii doi parametrii specifica marimile FFT2D. Exista o relatie ıntre dimensiunea
chip-ului si marimea FFT care determina o simulare corecta. Cu cat dimensiunea FFT
este aleasa mai mare, cu atat creste necesarul de memorie pentru simulare. Dimensiunea
minima FFT recomandata este de 128x128. Parametrul pentru TechFile este numele ales
pentru fisierul de tehnologie. Campul TechPath va contine calea catre locul unde se gasesc
datele ın format binar.
Sectiunea <layer> contine definitiile pentru diferiti dielectrici si substraturi. Un sub-
strat conductor este specificat prin declararea rezistivitatii acestuia ın Ωcm. Grosimea se
specifica ın m. Permitivitatea se exprima ın unitati relative. Layerele substratului sunt
definite de jos ın sus.
Straturile metalice sunt definite prin sectiunea <metal>. Fiecare strat metalic apartine
unui ”layer” specific identificat prin sectiunea layer.
Formatul rezultatelor
Datele de iesire ale programului se clasifica ın trei categorii:
• de analiza:
– rezistente si inductivitati ın regim stationar;
– matricea impedantelor la frecvente dorite;
37

4.2. Metode de rezolvare 38
– calculul parametrilor admitanta Y , impedanta Z si parametrilor de ımprastiere
S ai unui dispozitiv;
– calculul capacitatii unui grup de spirale;
– calculul factorului de calitate Q al unui inductor spiralat;
• de optimizare:
– optimizarea unei spirale patrate;
– optimizarea unui inductor poligonal simetric;
– optimizarea unui inductor patrat simetric;
– optimizarea unei spirale poligonale;
• de export: descrierea geometriei structurii analizate ın format CIF.
4.2 Metode de rezolvare
Atat inductoarele spiralate cat si transformatoarele constau dintr-o serie de segmente
metalice interconectate. Integrand campul electric de-a lungul unui astfel de structuri, se
obtine:
∫
C
E0 · dl −∫
C
J
σ− jω
∫
C
A · dl −∫
C
∇V · dl = 0 (4.1)
unde E0 este campul electric aplicat, J este densitatea de curent, σ este conductivitatea
segmentului metalic, A este potentialul megnetic vector, iar V este potentialul electric
scalar.
Aceasta ecuatie se obtine pornind de la formularea PEEC (”Partial Element Equivalent
Circuit”) [5]. Primul termen din ecuatia (4.1) rezulta din campul aplicat, al doilea termen
reprezinta tensiunea pe impedanta interna a segmentelor, al treilea termen reprezinta
tensiunea pe inductanta externa, iar al patrulea este termenul capacitiv.
Potentialele magnetice si electrice reprezentate ın complex au ın regim periodic urmatoarele
expresii:
V (x, y, z) =
∫
V
ρ(x′, y′, z′)e−jkR
4πεRdv′ (4.2)
A(x, y, z) = µ
∫
V
J(x′, y′, z′)ejkR
4πRdv′ (4.3)
ın care ρ este densitatea superficiala de sarcina, iar J este densitatea de curent.
38

4.2. Metode de rezolvare 39
R
R
C C
R
L R
C
R
Z
C
Rj−1,s1
j−1,s1 j−1,s2
j−1,s2 j,s1
j,s1
j,s2R
j,s2C j+1,s1
j+1,s1
j+1,s2
j+1,s2
C
R
L j−1 j−1 j j j+1j+1L R
j−1,s1Cj−1,j Cj,j+1Z Z
j,j+1j,j−1k k
k j−1,j+1Cj−1,j+1Z
Figura 4.1: Modelul circuitului electric echivalent al segmentelor spiralei
Aduse la aceasta forma, ecuatiile (4.2), (4.3) au doar valoare teoretica deoarece implica
integrarea tuturor sarcinilor si curentilor, inclusiv a celor din substrat. Daca se ınlocuieste
termenul 1/R specific functiei Green a spatiului liber cu functiile Green corespunzatoare
substratului multistrat, integralele nu mai trebuie efectuate pe substrat si se reduc la
integralele pe segmentele metalice ale traseelor conductoare.
Incluzand A si V in relatia (4.1) si separand curentii si sarcinile din fiecare segment,
se va obtine un sistem liniar de ecuatii. Fiecare ecuatie contine termeni reprezentand
impedanta interna a fiecarui segment precum si cuplajul magnetic si electric mutual dintre
segmente si termeni ce reprezinta cuplajul magnetic si electric din substrat (daca nu se
folosesc functiile Green ”stratificate”).
Formularea ecuatiei circuitului
In figura 4.1 este reprezentat circuitul electric corespunzator relatiei (4.1). Fiecarui seg-
ment din numarul total de s segmente care alcatuiesc dispozitivul, ıi corespunde un nod,
o latura longitudinala R serie, una RC transversala (spre masa) si (s − 1) laturi RC de
cuplaj capacitiv catre celelalte segmente.
In consecinta numarul de noduri are ordinul N = O(s), iar numarul de laturi si cel
al buclelor independente este de ordinul O(s2). Aceasta face tehnica nodala sa fie mai
eficienta decat cea a buclelor.
Prezenta bobinelor cuplate impune utilizarea metodelor nodale modificate (MNA), ın
care necunoscutele principale sunt vectorul v al potentialelor nodurilor si curentul i din
laturile inductive. Ecuatiile circuitului au forma:
39
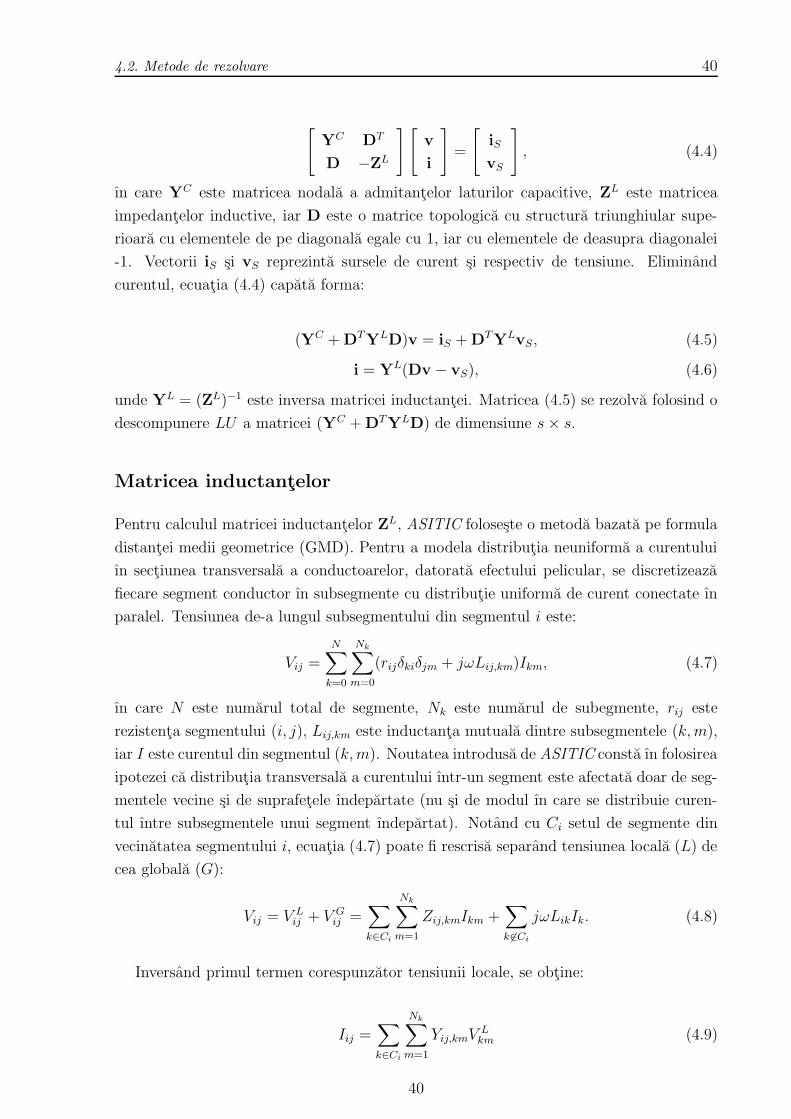
4.2. Metode de rezolvare 40
[
YC DT
D −ZL
][
v
i
]
=
[
iS
vS
]
, (4.4)
ın care YC este matricea nodala a admitantelor laturilor capacitive, ZL este matricea
impedantelor inductive, iar D este o matrice topologica cu structura triunghiular supe-
rioara cu elementele de pe diagonala egale cu 1, iar cu elementele de deasupra diagonalei
-1. Vectorii iS si vS reprezinta sursele de curent si respectiv de tensiune. Eliminand
curentul, ecuatia (4.4) capata forma:
(YC + DTYLD)v = iS + DTYLvS, (4.5)
i = YL(Dv − vS), (4.6)
unde YL = (ZL)−1 este inversa matricei inductantei. Matricea (4.5) se rezolva folosind o
descompunere LU a matricei (YC + DTYLD) de dimensiune s× s.
Matricea inductantelor
Pentru calculul matricei inductantelor ZL, ASITIC foloseste o metoda bazata pe formula
distantei medii geometrice (GMD). Pentru a modela distributia neuniforma a curentului
ın sectiunea transversala a conductoarelor, datorata efectului pelicular, se discretizeaza
fiecare segment conductor ın subsegmente cu distributie uniforma de curent conectate ın
paralel. Tensiunea de-a lungul subsegmentului din segmentul i este:
Vij =
N∑
k=0
Nk∑
m=0
(rijδkiδjm + jωLij,km)Ikm, (4.7)
ın care N este numarul total de segmente, Nk este numarul de subegmente, rij este
rezistenta segmentului (i, j), Lij,km este inductanta mutuala dintre subsegmentele (k,m),
iar I este curentul din segmentul (k,m). Noutatea introdusa de ASITIC consta ın folosirea
ipotezei ca distributia transversala a curentului ıntr-un segment este afectata doar de seg-
mentele vecine si de suprafetele ındepartate (nu si de modul ın care se distribuie curen-
tul ıntre subsegmentele unui segment ındepartat). Notand cu Ci setul de segmente din
vecinatatea segmentului i, ecuatia (4.7) poate fi rescrisa separand tensiunea locala (L) de
cea globala (G):
Vij = V Lij + V G
ij =∑
k∈Ci
Nk∑
m=1
Zij,kmIkm +∑
k 6∈Ci
jωLikIk. (4.8)
Inversand primul termen corespunzator tensiunii locale, se obtine:
Iij =∑
k∈Ci
Nk∑
m=1
Yij,kmVLkm (4.9)
40

4.2. Metode de rezolvare 41
si curentul total prin segmentul i:
Ii =
Ni∑
j=1
Iij =∑
k∈Ci
Ni∑
j=1
Nk∑
m=1
Yij,kmVLkm =
∑
k∈Ci
V LkmY
Lik . (4.10)
Ecuatia (4.8) devine:
Vi =∑
k∈Ci
ZLikIk +
∑
k 6∈Ci
jωLikIk (4.11)
Tehnica aceasta (care este de fapt o ”rarefiere” a matricei impedantelor) implica deter-
minarea elementelor Yij,km pornind de la Zij,km prin inversarea matricei Z la trecerea din
(4.8) ın (4.9) si o alta inversare de matrice pantru calculul elementelor ZLik ın functie de
Y Lkm. Ultima inversare cere un efort de calcul neglijabil deoarece matricea YL este mica.
Determinarea capacitatilor
Cunoasterea functiei Green pentru un substrat multistrat (obtinut prin rezolvarea ecuatiei
Poisson) permite definirea unor contacte 3D oriunde ın interiorul substratului.
Ecuatia Poisson poate fi adusa la forma integrala:
V (r) =
∫
V
ρ(r′)G(r, r′)d3r′. (4.12)
Pentru determinarea capacitatii unui contact plasat ıntr-un anumit mediu se evalueaza:
C = −ε∮
S
E · dA, (4.13)
unde ε este permitivitatea mediului, E este intensitatea campului electric ın mediu, iar
S este suprafata contactului. Pentru determinarea rezistentei contactului se evalueaza
integrala similara:1
R= −σ
∮
S
E · dA, (4.14)
ın care σ este conductivitatea materialului.
Ecuatia (4.12) este o exprimare a potentialului pe contactul i datorat distributiei de
sarcina din contactul j. Pentru contacte suficient de mici i si j se poate presupune o
distributie uniforma de sarcina, iar potentialul de pe fiecare contact ca fiind o medie a
potentialelor de pe volumul contactului. Cu aceste aproximari, relatia (4.12) devine:
V =Qj
V − jVi
∫ ∫
DjDi
Gdvjdvi. (4.15)
Aplicand aceasta integrala pe toate combinatiile de contacte, se genereaza ecuatia
matriceala:
41

4.2. Metode de rezolvare 42
v = Pq,
ın care matricea P este matricea coeficientilor de potential ce mapeaza vectorul q al
sarcinilor pe vectorul v al potentialelor. Prin inversarea acestei matrice se obtine matricea
capacitatilor, care asigura legatura:
q = Cv.
In aplicatiile practice este necesara o metoda rapida de evaluare a functiilor Green
ın mai multe puncte din substrat. O astfel de tehnica este cea a transformarii cosinus
discrete (DCT- ”discrete cosine transform”)[6]
42
Capitolul 5
Modelarea structurilor pasive din
circuitele integrate
In acest capitol se prezinta modelarea catorva structuri pasive tipice: o bobina, un rezistor,
o linie de transmisie si se analizeaza influenta unor parametrii cum ar fi: finetea retelei
de discretizare si a extinderii domeniului de calcul asupra rezultatelor.
5.1 Influenta unor parametrii asupra rezultatelor
Date geometrice
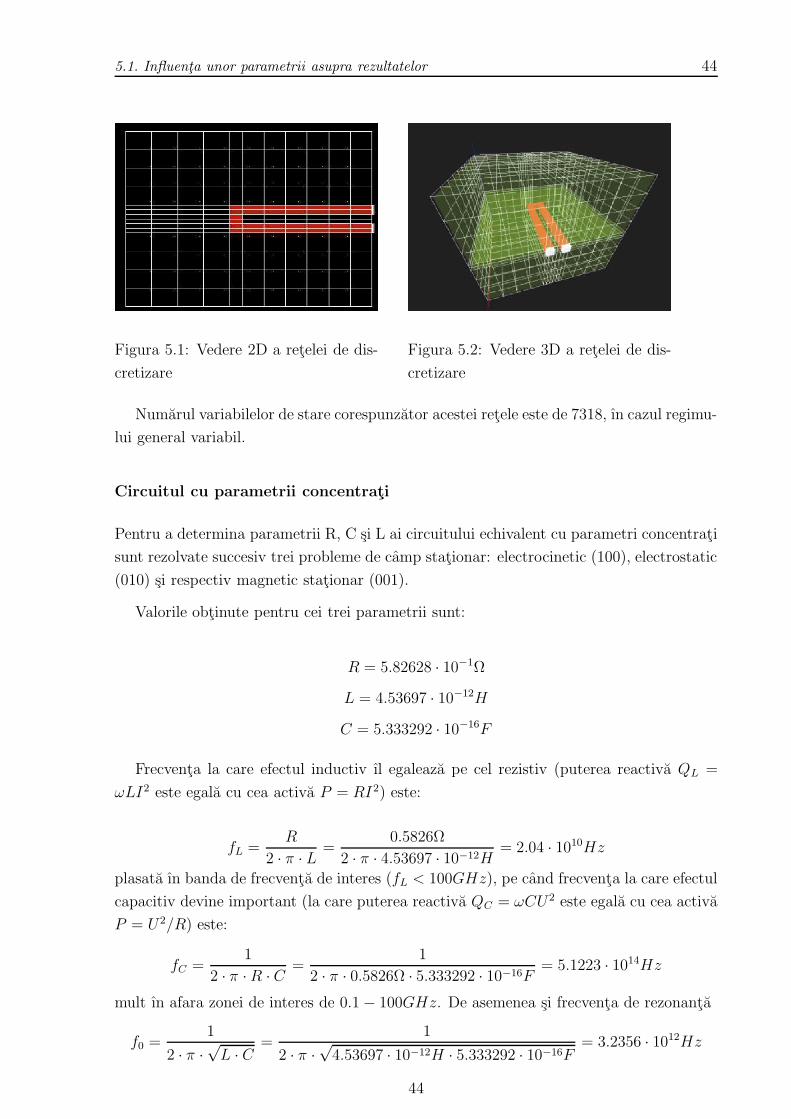
Dispozitivul studiat consta ıntr-o interconexiune de forma literei U (fig.5.2) aflata ıntr-un
mediu izolat.
Conductorul are sectiunea un patrat cu latura de 1µm. Lungimea celor doua brate
simetrice este de 10µm, iar distanta dintre ele este de 1µm. Domeniul izolant ın care se
afla conductorul este un paralelipiped de dimensiuni 19µm× 19µm× 17µm.
Materiale
Materialul conductor este alminiu cu permeabilitatea magnetica relativa µr = 1, permi-
tivitatea electrica relativa εr = 1 si conductivitatea σ = 3.704 · 107S/m.
Materialul izolant este oxidul de siliciu, cu permeabilitatea magnetica relativa µr = 1,
permitivitatea electrica relativa ε = 3.9 si conductivitatea σ = 10−4S/m.
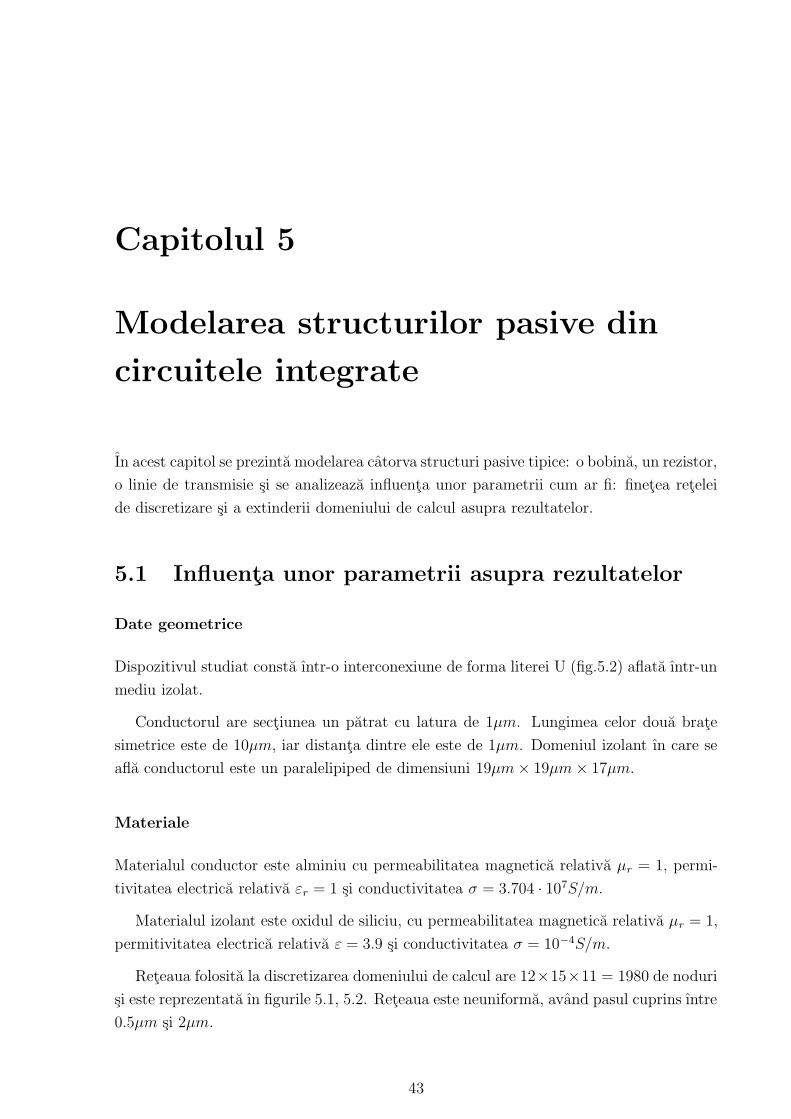
Reteaua folosita la discretizarea domeniului de calcul are 12×15×11 = 1980 de noduri
si este reprezentata ın figurile 5.1, 5.2. Reteaua este neuniforma, avand pasul cuprins ıntre
0.5µm si 2µm.
43
5.1. Influenta unor parametrii asupra rezultatelor 44
Figura 5.1: Vedere 2D a retelei de dis-
cretizare
Figura 5.2: Vedere 3D a retelei de dis-
cretizare
Numarul variabilelor de stare corespunzator acestei retele este de 7318, ın cazul regimu-
lui general variabil.
Circuitul cu parametrii concentrati
Pentru a determina parametrii R, C si L ai circuitului echivalent cu parametri concentrati
sunt rezolvate succesiv trei probleme de camp stationar: electrocinetic (100), electrostatic
(010) si respectiv magnetic stationar (001).
Valorile obtinute pentru cei trei parametrii sunt:
R = 5.82628 · 10−1Ω
L = 4.53697 · 10−12H
C = 5.333292 · 10−16F
Frecventa la care efectul inductiv ıl egaleaza pe cel rezistiv (puterea reactiva QL =
ωLI2 este egala cu cea activa P = RI2) este:
fL =R
2 · π · L =0.5826Ω
2 · π · 4.53697 · 10−12H= 2.04 · 1010Hz
plasata ın banda de frecventa de interes (fL < 100GHz), pe cand frecventa la care efectul
capacitiv devine important (la care puterea reactiva QC = ωCU2 este egala cu cea activa
P = U2/R) este:
fC =1
2 · π ·R · C =1
2 · π · 0.5826Ω · 5.333292 · 10−16F= 5.1223 · 1014Hz
mult ın afara zonei de interes de 0.1 − 100GHz. De asemenea si frecventa de rezonanta
f0 =1
2 · π ·√L · C
=1
2 · π ·√
4.53697 · 10−12H · 5.333292 · 10−16F= 3.2356 · 1012Hz
44

5.1. Influenta unor parametrii asupra rezultatelor 45
depaseste frecventa maxima de interes.
Valorile parametrilor concentrati pot fi validate prin comparatie cu cele obtinute folosind
formule analitice de aproximare:
R =l
σA=
23 · 10−6m
3.704 · 107S/m · 10−12m2= 6.21 · 10−1Ω
ın care l este lungimea conductorului (23µm), σ este conductivitatea aluminiului (3.704 ·107S/m), iar A este aria conductorului (1µm2).
Pentru calculul capacitatii si al inductivitatii, cele doua conductoare paralele s-au
asimilat cu doi cilindri de raza a = 0.5µm, plasati la distanta D = 2µm ıntre axe:
C =l
2· Cl =
l · ε2 · ln 2a
D−√D2−4a2
=10 · 10−6m · 8.8542 · 10−12 A·S
V ·m2 · ln 2·0.5·10−6m
2·10−6m−√
4·10−12m2−4·0.25·10−12m2
= 1.311 · 10−4pF
L =µ0 · lπ
·[
lnD
8+
1
8
]
=1.2556 · 10−6 V ·S
A·m · 10 · 10−6m
π·[
ln2 · 10−6m
0.5 · 10−6m+
1
8
]
= 6.045pH
Raza a = 0.5µm corespunde cazului ın care sectiunea cilindrului este un cerc ınscris ın
sectiunea conductorului, care este un patrat cu latura de 1µm. Se mai ia ın consideratie
si cazul ın care sectiunea cilindrului circumscrie sectiunea conductorului, adica raza este
a =√
2 · 0.5µm = 0.707µm, iar ariile celor doua sectiuni (a cercului de raza a si a
patratului de latura 1µm) sunt egale si cazul ın care raza este a = 1/√πµm = 0.564µm.
Rezultatele pentru cei trei parametrii R, L, C, precum si erorile pentru fiecare metoda
sunt prezentate ın tabelele 5.1, 5.2.
Parametrul calculat FIT Metoda analitica
a = 0.5µm a = 0.707µm a = 0.564µm
R[Ω] 5.83 · 10−1 7.91 · 10−1 3.95 · 10−1 6.21 · 10−1
L[nH] 4.54 6.05 4.66 5.56
C[pF] 5.33 · 10−4 1.31 · 10−4 1.96 · 10−4 1.47 · 10−4
Tabelul 5.1: Valori RLC calculate cu FIT si cu metoda analitica
Abaterile rezistentei (6−53%) se datoreaza efectului de capat. Abaterile inductivitatii
(2 − 33%) se datoreaza atat efectului de capat, cat si limitarii artificiale a domeniului de
calcul din metoda FIT. Abaterile mari ale capacitatii (de aproximativ 70%) se datoraza
si faptului ca energia electrica utilizata ın metoda FIT pentru calculul capacitatii contine
si energia din interiorul conductorului.
45
5.1. Influenta unor parametrii asupra rezultatelor 46
Parametrul calculat a = 0.5µm a = 0.707µm a = 0.564µm
R[Ω] 35.70% −32.15% 6.58%
L[nH] 33.24% 2.69% 22.59%
C[pF] −75.42% −63.27% −72.44%
Tabelul 5.2: Erorile fata de FIT
Analiza ın frecventa
A fost efectuata analiza la 20 de frecvente din gama 0.1GHz − 100GHz, ın urmatoarele
regimuri ale campului electromagnetic:
• 111 - regim general variabil (FW) / Circuit RLC;
• 011 - regim fara pierderi (LL) / Circuit LC;
• 101 - regim magnetocuasistationar (MQS) / Circuit RL;
• 110 - regim electrocuasistationar (EQS) / Circuit RC;
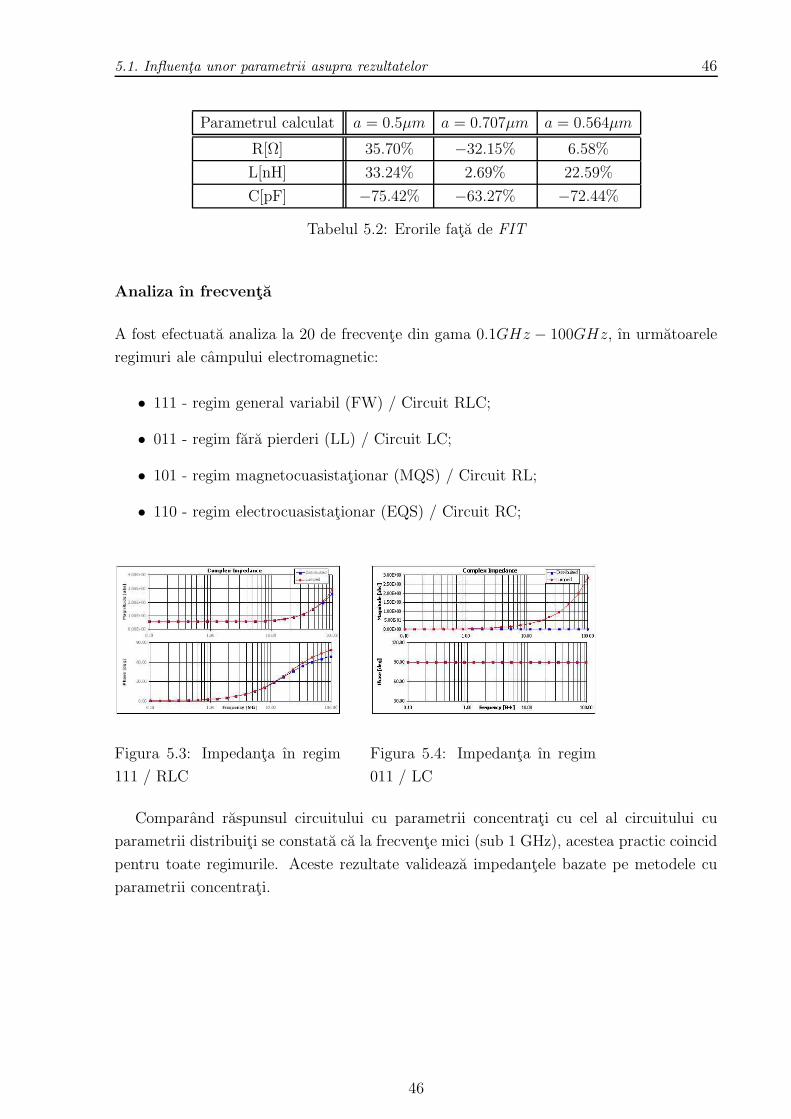
Figura 5.3: Impedanta ın regim
111 / RLC
Figura 5.4: Impedanta ın regim
011 / LC
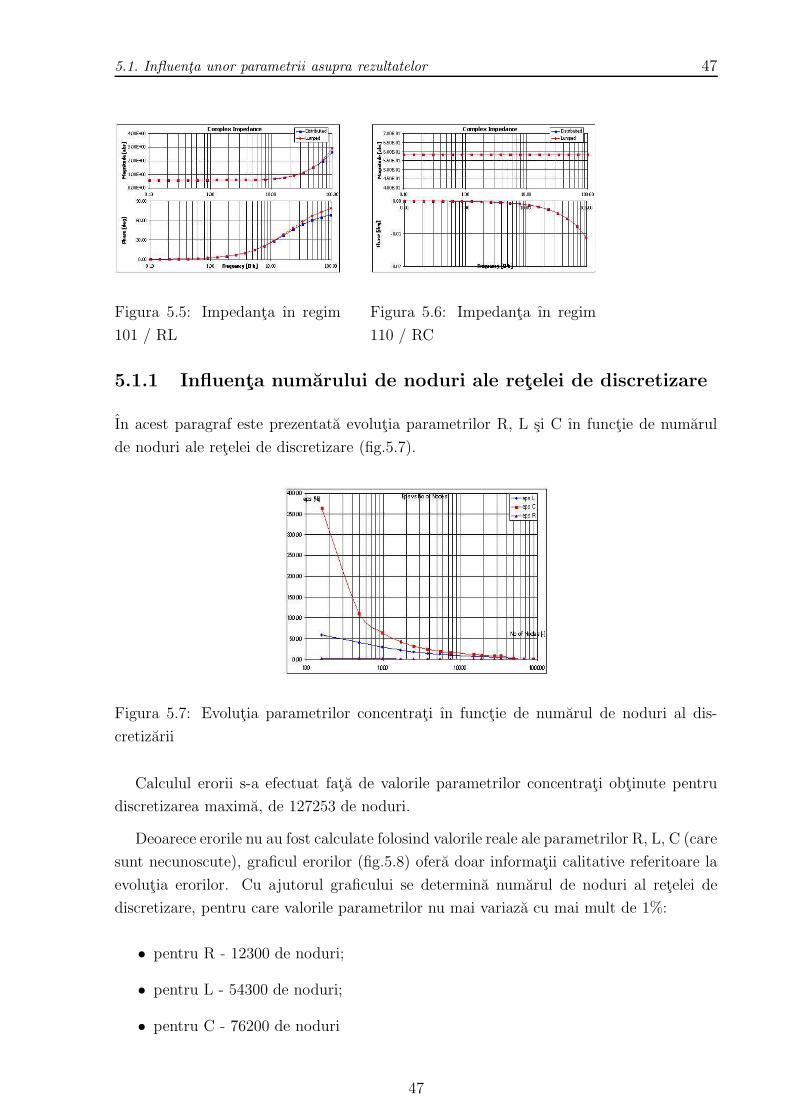
Comparand raspunsul circuitului cu parametrii concentrati cu cel al circuitului cu
parametrii distribuiti se constata ca la frecvente mici (sub 1 GHz), acestea practic coincid
pentru toate regimurile. Aceste rezultate valideaza impedantele bazate pe metodele cu
parametrii concentrati.
46
5.1. Influenta unor parametrii asupra rezultatelor 47
Figura 5.5: Impedanta ın regim
101 / RL
Figura 5.6: Impedanta ın regim
110 / RC
5.1.1 Influenta numarului de noduri ale retelei de discretizare
In acest paragraf este prezentata evolutia parametrilor R, L si C ın functie de numarul
de noduri ale retelei de discretizare (fig.5.7).
Figura 5.7: Evolutia parametrilor concentrati ın functie de numarul de noduri al dis-
cretizarii
Calculul erorii s-a efectuat fata de valorile parametrilor concentrati obtinute pentru
discretizarea maxima, de 127253 de noduri.
Deoarece erorile nu au fost calculate folosind valorile reale ale parametrilor R, L, C (care
sunt necunoscute), graficul erorilor (fig.5.8) ofera doar informatii calitative referitoare la
evolutia erorilor. Cu ajutorul graficului se determina numarul de noduri al retelei de
discretizare, pentru care valorile parametrilor nu mai variaza cu mai mult de 1%:
• pentru R - 12300 de noduri;
• pentru L - 54300 de noduri;
• pentru C - 76200 de noduri
47
5.1. Influenta unor parametrii asupra rezultatelor 48
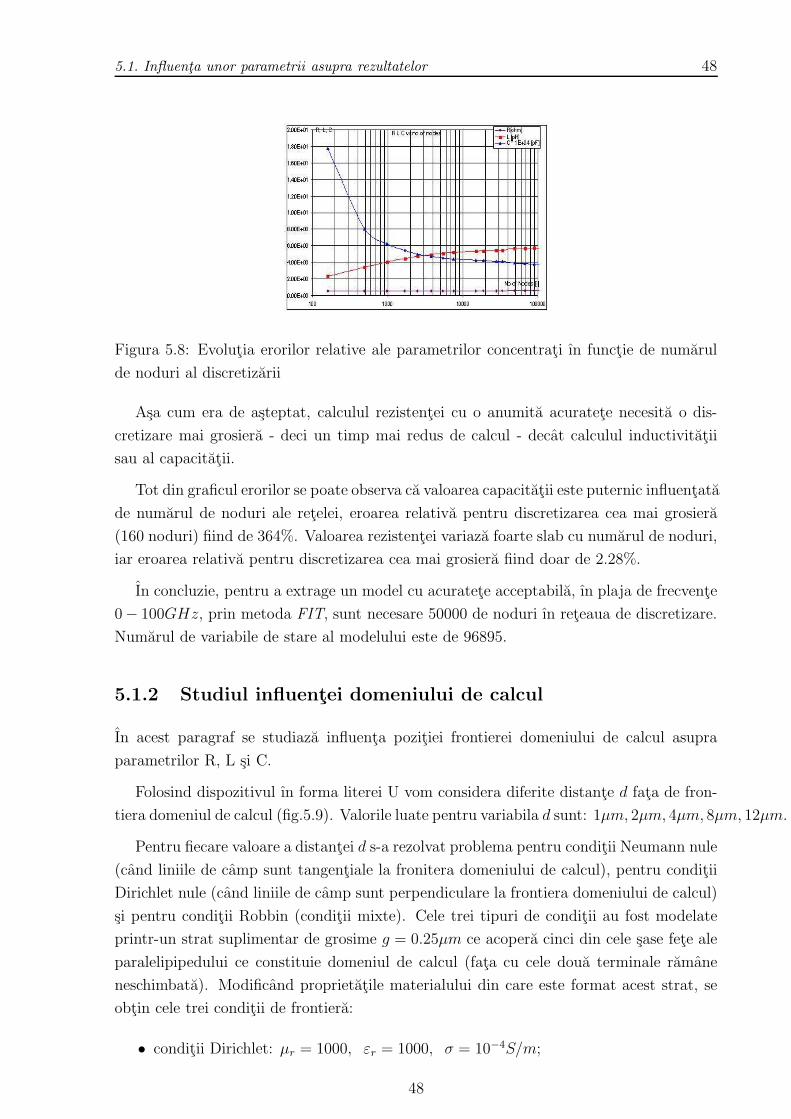
Figura 5.8: Evolutia erorilor relative ale parametrilor concentrati ın functie de numarul
de noduri al discretizarii
Asa cum era de asteptat, calculul rezistentei cu o anumita acuratete necesita o dis-
cretizare mai grosiera - deci un timp mai redus de calcul - decat calculul inductivitatii
sau al capacitatii.
Tot din graficul erorilor se poate observa ca valoarea capacitatii este puternic influentata
de numarul de noduri ale retelei, eroarea relativa pentru discretizarea cea mai grosiera
(160 noduri) fiind de 364%. Valoarea rezistentei variaza foarte slab cu numarul de noduri,
iar eroarea relativa pentru discretizarea cea mai grosiera fiind doar de 2.28%.
In concluzie, pentru a extrage un model cu acuratete acceptabila, ın plaja de frecvente
0− 100GHz, prin metoda FIT, sunt necesare 50000 de noduri ın reteaua de discretizare.
Numarul de variabile de stare al modelului este de 96895.
5.1.2 Studiul influentei domeniului de calcul
In acest paragraf se studiaza influenta pozitiei frontierei domeniului de calcul asupra
parametrilor R, L si C.
Folosind dispozitivul ın forma literei U vom considera diferite distante d fata de fron-
tiera domeniul de calcul (fig.5.9). Valorile luate pentru variabila d sunt: 1µm, 2µm, 4µm, 8µm, 12µm.
Pentru fiecare valoare a distantei d s-a rezolvat problema pentru conditii Neumann nule
(cand liniile de camp sunt tangentiale la fronitera domeniului de calcul), pentru conditii
Dirichlet nule (cand liniile de camp sunt perpendiculare la frontiera domeniului de calcul)
si pentru conditii Robbin (conditii mixte). Cele trei tipuri de conditii au fost modelate
printr-un strat suplimentar de grosime g = 0.25µm ce acopera cinci din cele sase fete ale
paralelipipedului ce constituie domeniul de calcul (fata cu cele doua terminale ramane
neschimbata). Modificand proprietatile materialului din care este format acest strat, se
obtin cele trei conditii de frontiera:
• conditii Dirichlet: µr = 1000, εr = 1000, σ = 10−4S/m;
48

5.1. Influenta unor parametrii asupra rezultatelor 49
d
d
dSiO
Al
Figura 5.9: Domeniul de calcul
• conditii Neumann: µr = 1, εr = 3.9, σ = 10−4S/m;
• conditii Robin: µr = d/g, εr = 3.9 · d/g, σ = 10−4S/m.
Reteua de discretizare are pasul constant de 0.5µm.
Valoarea parametrului R este constanta pentru toate cele trei tipuri de frontiera si
pantru toate valorile lui d:
R = 0.590347Ω.
In tabelul 5.3 sunt trecute valorile obtinute pentru parametrii L si C, pentru fiecare
valoare a lui d si pentru toate cele trei conditii de frontiera si valorile mediei aritmetice
si armonice a valorilor parametrilor L si C obtinute pentru conditii de tip Neumann si
Dirichlet. In acelasi tabel mai sunt trecute si erorile parametrilor L si C, considerand
ca referinta valorile obtinute pentru media aritmetica si pentru d = 12µm, precum si
numarul de noduri ale retelei de discretizare pentru fiecare domeniu.
In figurile 5.10, 5.11 sunt reprezentate variatiile parametrului L, respectiv variatia
erorilor parametrului L, ın functie de distanta d dintre conductor si frontiera domeniului de
calcul pentru cele cinci cazuri studiate, iar ın figurile 5.12 si 5.13 sunt reprezenate variatiile
parametrului C, respectiv variatiile erorilor parametrului C ın functie de distanta d. Din
tabel si din grafice se poate observa ca atat pentru inductivitate cat si pentru capacitate,
eroarea relativa initiala pentru media armonica este cea mai mica (1.19% pentru C si
1.88% pentru L), fata se celelalte metode. Astfel, pentru a obtine valori ale parametrilor
concentrati cu erori cat mai mici, este de preferat sa rezolvam de doua ori problema pantru
d = 1µm (cu conditii Neumann si Dirichel) si sa calculam media armonica a celor doua
valori obtinute, decat sa rezolvam problema o singura data pentru d = 16µm. Motivatia
49
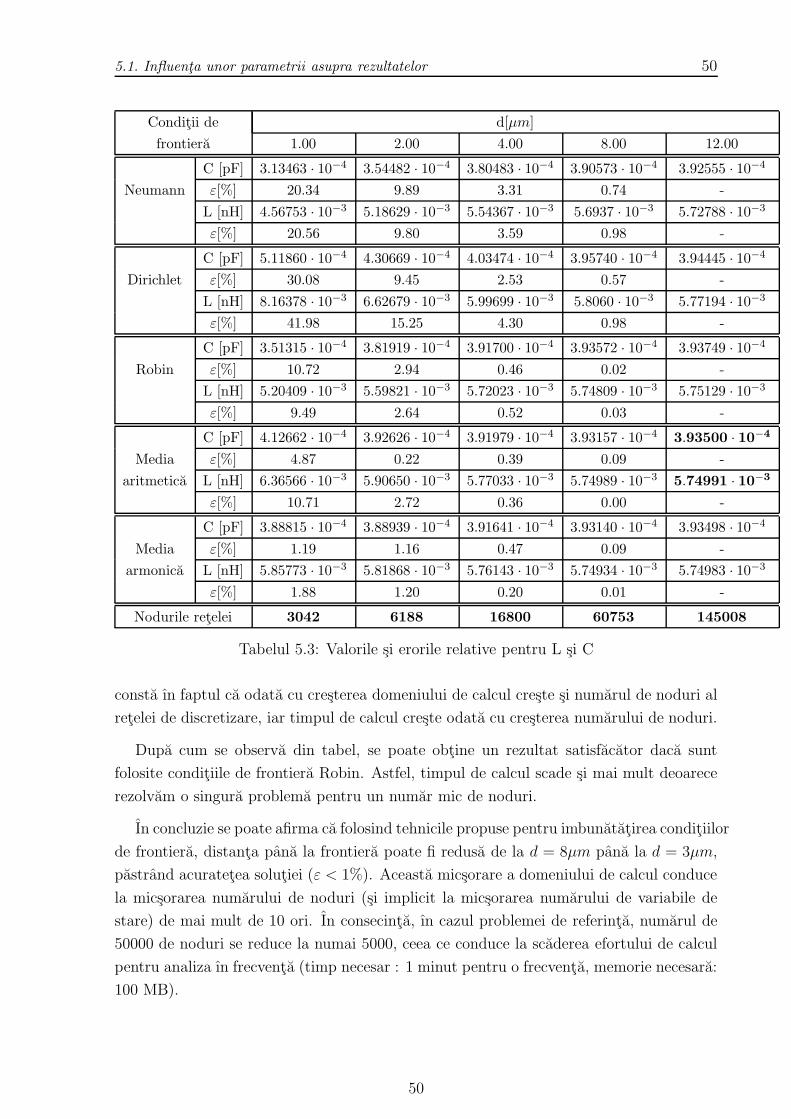
5.1. Influenta unor parametrii asupra rezultatelor 50
Conditii de d[µm]
frontiera 1.00 2.00 4.00 8.00 12.00
C [pF] 3.13463 · 10−4 3.54482 · 10−4 3.80483 · 10−4 3.90573 · 10−4 3.92555 · 10−4
Neumann ε[%] 20.34 9.89 3.31 0.74 -
L [nH] 4.56753 · 10−3 5.18629 · 10−3 5.54367 · 10−3 5.6937 · 10−3 5.72788 · 10−3
ε[%] 20.56 9.80 3.59 0.98 -
C [pF] 5.11860 · 10−4 4.30669 · 10−4 4.03474 · 10−4 3.95740 · 10−4 3.94445 · 10−4
Dirichlet ε[%] 30.08 9.45 2.53 0.57 -
L [nH] 8.16378 · 10−3 6.62679 · 10−3 5.99699 · 10−3 5.8060 · 10−3 5.77194 · 10−3
ε[%] 41.98 15.25 4.30 0.98 -
C [pF] 3.51315 · 10−4 3.81919 · 10−4 3.91700 · 10−4 3.93572 · 10−4 3.93749 · 10−4
Robin ε[%] 10.72 2.94 0.46 0.02 -
L [nH] 5.20409 · 10−3 5.59821 · 10−3 5.72023 · 10−3 5.74809 · 10−3 5.75129 · 10−3
ε[%] 9.49 2.64 0.52 0.03 -
C [pF] 4.12662 · 10−4 3.92626 · 10−4 3.91979 · 10−4 3.93157 · 10−43.93500 · 10−4
Media ε[%] 4.87 0.22 0.39 0.09 -
aritmetica L [nH] 6.36566 · 10−3 5.90650 · 10−3 5.77033 · 10−3 5.74989 · 10−35.74991 · 10−3
ε[%] 10.71 2.72 0.36 0.00 -
C [pF] 3.88815 · 10−4 3.88939 · 10−4 3.91641 · 10−4 3.93140 · 10−4 3.93498 · 10−4
Media ε[%] 1.19 1.16 0.47 0.09 -
armonica L [nH] 5.85773 · 10−3 5.81868 · 10−3 5.76143 · 10−3 5.74934 · 10−3 5.74983 · 10−3
ε[%] 1.88 1.20 0.20 0.01 -
Nodurile retelei 3042 6188 16800 60753 145008
Tabelul 5.3: Valorile si erorile relative pentru L si C
consta ın faptul ca odata cu cresterea domeniului de calcul creste si numarul de noduri al
retelei de discretizare, iar timpul de calcul creste odata cu cresterea numarului de noduri.
Dupa cum se observa din tabel, se poate obtine un rezultat satisfacator daca sunt
folosite conditiile de frontiera Robin. Astfel, timpul de calcul scade si mai mult deoarece
rezolvam o singura problema pentru un numar mic de noduri.
In concluzie se poate afirma ca folosind tehnicile propuse pentru imbunatatirea conditiilor
de frontiera, distanta pana la frontiera poate fi redusa de la d = 8µm pana la d = 3µm,
pastrand acuratetea solutiei (ε < 1%). Aceasta micsorare a domeniului de calcul conduce
la micsorarea numarului de noduri (si implicit la micsorarea numarului de variabile de
stare) de mai mult de 10 ori. In consecinta, ın cazul problemei de referinta, numarul de
50000 de noduri se reduce la numai 5000, ceea ce conduce la scaderea efortului de calcul
pentru analiza ın frecventa (timp necesar : 1 minut pentru o frecventa, memorie necesara:
100 MB).
50

5.2. Modelarea bobinei 51
Figura 5.10: Variatia inductivitatii cu
distanta d
Figura 5.11: Variatia erorii relative a
inductivitatii cu distanta d
Figura 5.12: Variatia capacitatii cu
distanta d
Figura 5.13: Variatia erorii relative a
capacitatii cu distanta d
5.2 Modelarea bobinei
Bobinele studiate sunt folosite numai la frecvente de ordinul GHz. Banda de interes este
relativ ıngusta deoarece nici frecventele joase si nici cele foarte ınalte nu joaca un rol
foarte important ın proiectarea circuitelor.
5.2.1 Formularea problemei
Date geometrice
Bobina (fig.5.14) este formata dintr-un material conductor cu sectiunea un patrat, cu
latura de 5µm, aflat ıntr-un mediu izolant. Distanta dintre spirele bobinei este de 3µm.
Domeniul de calcul al bobinei este un paralelipiped de dimensiuni 330.45µm×340.15µm×195.617µm.
51
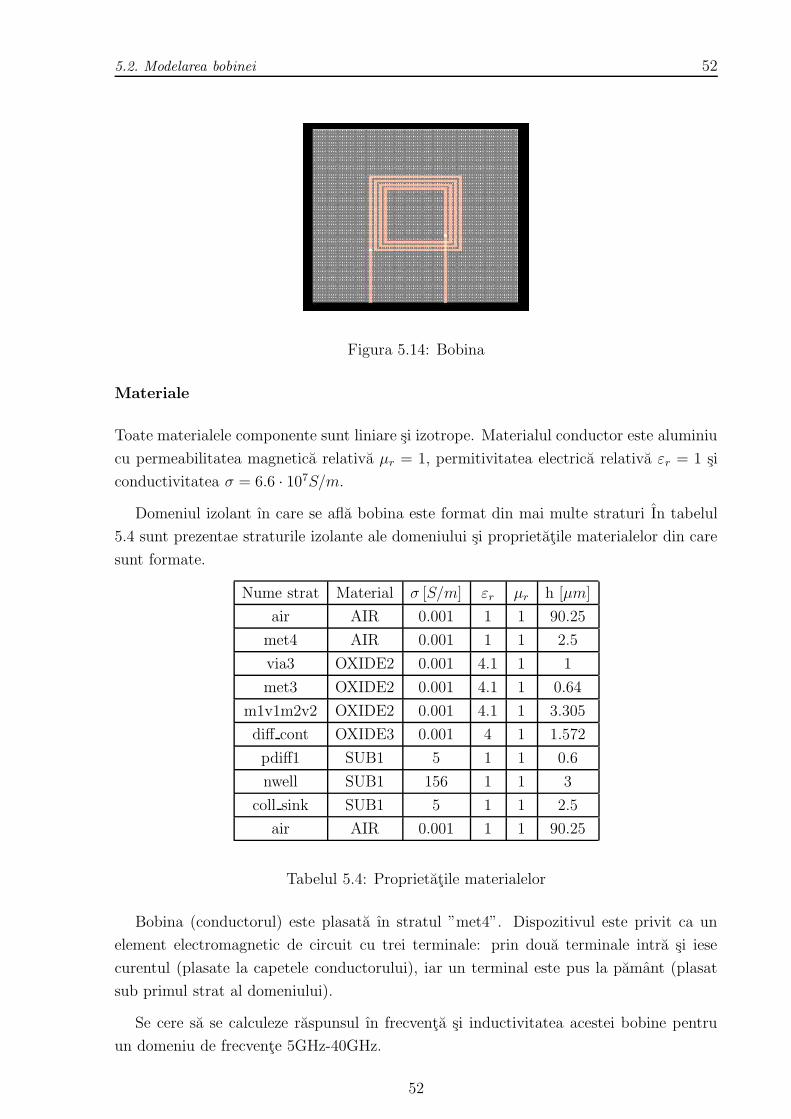
5.2. Modelarea bobinei 52
Figura 5.14: Bobina
Materiale
Toate materialele componente sunt liniare si izotrope. Materialul conductor este aluminiu
cu permeabilitatea magnetica relativa µr = 1, permitivitatea electrica relativa εr = 1 si
conductivitatea σ = 6.6 · 107S/m.
Domeniul izolant ın care se afla bobina este format din mai multe straturi In tabelul
5.4 sunt prezentae straturile izolante ale domeniului si proprietatile materialelor din care
sunt formate.
Nume strat Material σ [S/m] εr µr h [µm]
air AIR 0.001 1 1 90.25
met4 AIR 0.001 1 1 2.5
via3 OXIDE2 0.001 4.1 1 1
met3 OXIDE2 0.001 4.1 1 0.64
m1v1m2v2 OXIDE2 0.001 4.1 1 3.305
diff cont OXIDE3 0.001 4 1 1.572
pdiff1 SUB1 5 1 1 0.6
nwell SUB1 156 1 1 3
coll sink SUB1 5 1 1 2.5
air AIR 0.001 1 1 90.25
Tabelul 5.4: Proprietatile materialelor
Bobina (conductorul) este plasata ın stratul ”met4”. Dispozitivul este privit ca un
element electromagnetic de circuit cu trei terminale: prin doua terminale intra si iese
curentul (plasate la capetele conductorului), iar un terminal este pus la pamant (plasat
sub primul strat al domeniului).
Se cere sa se calculeze raspunsul ın frecventa si inductivitatea acestei bobine pentru
un domeniu de frecvente 5GHz-40GHz.
52

5.2. Modelarea bobinei 53
5.2.2 Rezultatele experimentale disponibile
Pentru aceasta bobina au fost masurati parametrii de ımprastiere S (Anexa C). Rezul-
tatele sunt prezentate ın figurile 5.15 - 5.18.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Frequency [HZ]
Rea
l par
t in
=1 o
ut =
1−−−
S
SP−SMALL−40GHz.s2p
Figura 5.15: Componenta reala a
parametrului S11
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
Frequency [HZ]
Imag
inar
y pa
rt in
=1
out =
1−−−
S
SP−SMALL−40GHz.s2p
Figura 5.16: Componenta imagi-
nara a parametrului S11
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Frequency [HZ]
Rea
l par
t in
=1 o
ut =
2−−−
S
SP−SMALL−40GHz.s2p
Figura 5.17: Componenta reala a
parametrului S12
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
−0.7
−0.6
−0.5
−0.4
−0.3
−0.2
−0.1
0
Frequency [HZ]
Imag
inar
y pa
rt in
=1
out =
2−−−
S
SP−SMALL−40GHz.s2p
Figura 5.18: Componenta imagi-
nara a parametrului S12
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
−4
−3
−2
−1
0
1
2
3
4
5
6x 10
−9
frequency [Hz]
Indu
ctan
ce [H
]
Parameter L − port1 drive
SP−SMALL−40GHz.s2p
Figura 5.19: Parametrul L - port1
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
0
1
2
3
4
5
6
7
8
frequency [Hz]
qual
ity fa
ctor
Quality factor (L or C) − port1 drive
SP−SMALL−40GHz.s2p
Figura 5.20: Factorul de calitate
Q- port 1
53
5.2. Modelarea bobinei 54
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
−6
−4
−2
0
2
4
6
8
10x 10
−9
frequency [Hz]
Indu
ctan
ce [H
]
Parameter L − port12 drive
SP−SMALL−40GHz.s2p
Figura 5.21: Parametrul L - p1 -
p2
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
0
2
4
6
8
10
12
14
16
frequency [Hz]
qual
ity fa
ctor
Quality factor (L or C) − port12 drive
SP−SMALL−40GHz.s2p
Figura 5.22: Factorul de calitate
Q - port1 - port2
Pentru proiectanti sunt foarte sugestivi parametrul L si factorul de calitate Q ce pot fi
calculati conform formulelor din Anexa C. In cazul bobinei, din masuratorile de mai sus
rezulta valorile din figurile 5.19 - 5.22
5.2.3 Rezolvarea problemei de camp cu FIT
Reteaua folosita la discretizarea domeniului de calcul are 26 × 25 × 15 = 9750 noduri
si este reprezentata ın figurile 5.23, 5.24. Reteaua este neuniforma, avand pasul de dis-
cretizare cuprins ıntre 0.01µm si 3µm. Deoarece lungimea de unda a campului electro-
magnetic, ın mediul dielectric, la frecventa de 40GHz este
λ =c
f=
3 · 108
40 · 109=
3
400m = 7.5mm,
fenomenul de propagare poate fi bine reprezentat cu pasul ales. In mediul conductor
adancimea de patrundere a campului electromagnetic, la frecventa de 40GHz este
δ =
√
2
ωµσ=
√
2
2π · 40 · 109 · ·4π · 10−6 · 6.6 · 107= 0.309µm,
deci, reteaua nu va permite simularea efectului pelicular.
Numarul variabilelor de stare corespunzator acestei retele este n = 39945, ın cazul
regimului general variabil.
Fisierul .xml de descriere a problemei de camp este listat ın Anexa A.
Circuitul cu parametrii concentrati
Pentru determinarea parametrilor R, L si C ai circuitului echivalent cu parametrii concentrati
se rezolva pe rand trei problemele de camp stationar: electrocinetic, electrostatic si mag-
netic stationar. Puterea disipata, energia electrica si respectiv energia magnetica ın cele
54
5.2. Modelarea bobinei 55
Figura 5.23: Vedere 2D a retelei de dis-
cretizare
Figura 5.24: Vedere 3D a retelei de dis-
cretizare
trei probleme conduc la urmatoarele valori:
G =
[
0.126037 −0.126037
−0.126037 0.126037
]
Ω,
L =
[
2.53612 0
0 0
]
nH,
C =
[
6.86654 · 10−15 2.23102 · 10−15
2.23102 · 10−15 5.71686 · 10−15
]
F.
Modelul bobinei este cel corespunzator unui element electromagnetic de circuit cu
n = 3 borne si de aceea parametrii corespunzatori sunt matrice 2 × 2.
Trebuie remarcat faptul ca timpul de relaxare a sarcinilor din domeniul conductor:
τ =ε
σ=
8.8542 · 10−12 A·SV·m
6.6 · 107 Sm
= 1.341 · 10−19s
este mult mai mic decat perioada minima T = 1/fmax = 0.25 · 10−9s a semnalului, ceea
ce face ca efectele capacitive ın interiorul conductorului sa fie neglijabile.
Calculul parametrilor concentrati este folosit pentru validarea extinderii domeniului
de calcul, aspect deosebit de important ın modelarea unei bobine ın vederea calculului
inductivitatii acesteia.
Analiza ın frecvanta
Analiza a fost facuta ın regim general variabil ın 20 de puncte din banda de frecventa
5GHz − 40GHz, folosind algoritmul de rezolvare FIT. Excitarea bobinei a fost facuta ın
tensiune, deci matricea de circuit rezultata este admitanta complexa Y .
55
5.2. Modelarea bobinei 56
Pentru a putea compara rezultatele obtinute prin simularea cu FIT (admitanta) fata
de datele masurate (parametrii de ımprastiere), din rezultatele numerice se calculeaza
parametrii de ımprastiere, cu ajutorul relatiilor prezentate ın Anexa C.
In figurile 5.25 - 5.28 sunt reprezentate graficele componentelor reale si imaginare ale
parametrilor de ımprastiere.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Frequency [HZ]
Re
al p
art
in =
1 o
ut
=1
−−
−S
SP−SMALL−40GHz.s2pd−SP−SMALL−1−111−SRI.s2pabsolute error
Figura 5.25: Masurare vs. FIT - real
S11
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
Frequency [HZ]
Ima
gin
ary
pa
rt in
=1
ou
t =
1−
−−
S
SP−SMALL−40GHz.s2pd−SP−SMALL−1−111−SRI.s2pabsolute error
Figura 5.26: Masurare vs. FIT - imag-
inar S11
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Frequency [HZ]
Re
al p
art
in =
1 o
ut
=2
−−
−S
SP−SMALL−40GHz.s2pd−SP−SMALL−1−111−SRI.s2pabsolute error
Figura 5.27: Masurare vs. FIT -
real S12
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
−0.6
−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
Frequency [HZ]
Ima
gin
ary
pa
rt in
=1
ou
t =
2−
−−
S
SP−SMALL−40GHz.s2pd−SP−SMALL−1−111−SRI.s2pabsolute error
Figura 5.28: Masurare vs. FIT - imag-
inar S12
O masura cantitativa globala a diferentei relative dintre masurari si simulari se poate
obtine calculand eroarea relativa:
εr =rms||S − Sref ||Fmax||Sref ||F
,
unde || ||F este norma Frobenius. Pentru modelul real a rezultat o eroare de 31.34%, care
este ın limitele tehnologice.
Figurile 5.29, 5.32 reprezinta parametrul L si factorul de calitate Q calculati din
raspunsul ın frecvanta.
56

5.2. Modelarea bobinei 57
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
−4
−2
0
2
4
6
8x 10
−9
frequency [Hz]
Indu
ctan
ce [H
]Parameter L − port1 drive
SP−SMALL−40GHz.s2pd−SP−SMALL−1−111−SRI.s2pabsolute error
Figura 5.29: Graficul inductivitatii
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
0
1
2
3
4
5
6
7
8
frequency [Hz]
qual
ity fa
ctor
Quality factor (L or C) − port1 drive
SP−SMALL−40GHz.s2pd−SP−SMALL−1−111−SRI.s2pabsolute error
Figura 5.30: Factorul de calitate induc-
tiv si capacitiv
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
−6
−4
−2
0
2
4
6
8
10
12x 10
−9
frequency [Hz]
Indu
ctan
ce [H
]
Parameter L − port12 drive
SP−SMALL−40GHz.s2pd−SP−SMALL−1−111−SRI.s2pabsolute error
Figura 5.31: Graficul inductivitatii -
port1 -port2
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
0
2
4
6
8
10
12
14
16
frequency [Hz]
qual
ity fa
ctor
Quality factor (L or C) − port12 drive
SP−SMALL−40GHz.s2pd−SP−SMALL−1−111−SRI.s2pabsolute error
Figura 5.32: Factorul de calitate induc-
tiv si capacitiv - port1 -port2
5.2.4 Rezolvarea problemei de camp cu ASITIC
Dupa ce ın prealabil a fost contruit fisierul tehnologic al bobinei studiate, programul va
genera un ”layout” ca ın figura 5.33.
Pentru calculul inductivitatii, ın curent continuu, sunt neglijate efectele magnetice ale
substraturilor. De asemenea se presupune ca distributia curentului prin conductoare este
uniforma.
Valoarea inductivitatii determinate cu ajutorul programului este:
L = 3.071nH.
In figurile 5.34, 5.35 sunt reprezentate graficul inductivitatii bobinei si graficul factoru-
lui de calitate pentru diferite valori ale frecventei.
Dupa cum se observa si ın graficul 5.34, inductivitatea creste pana la o valoare a
frecventei apropiata de frecventa de rezonanta proprie, iar apoi aceasta ısi schimba sensul
si incepe sa scada.
57
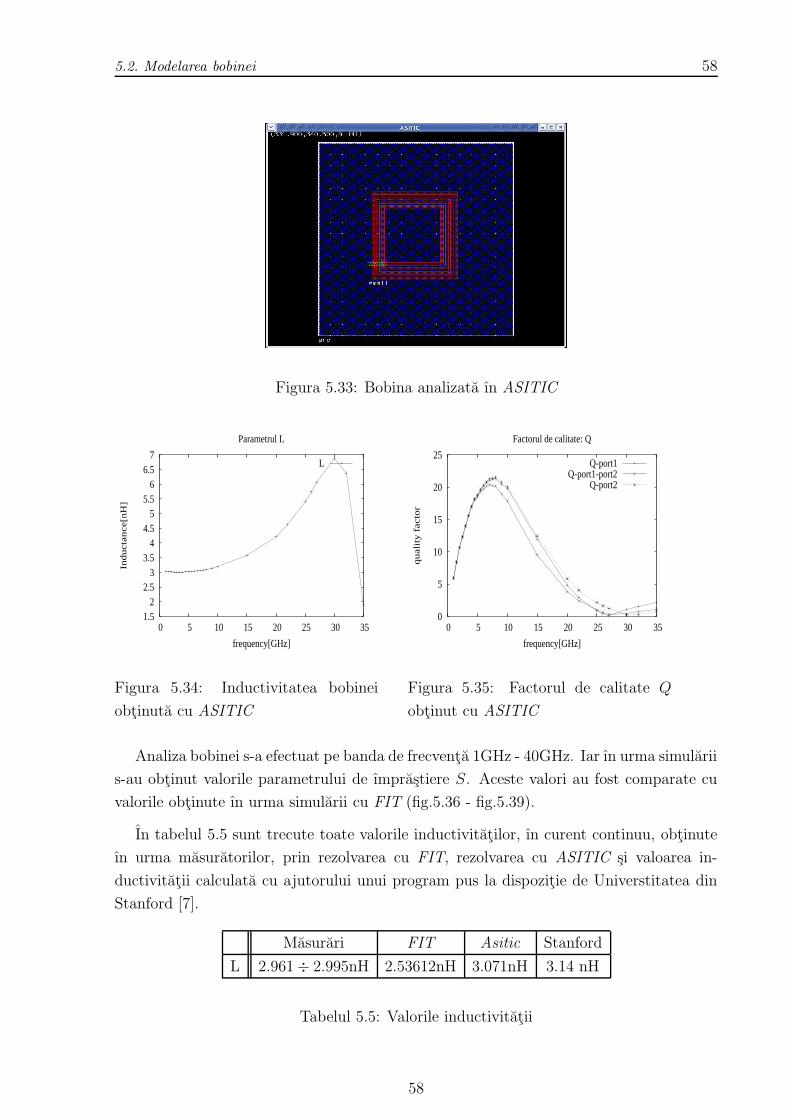
5.2. Modelarea bobinei 58
Figura 5.33: Bobina analizata ın ASITIC
1.5 2
2.5 3
3.5 4
4.5 5
5.5 6
6.5 7
0 5 10 15 20 25 30 35
Ind
uct
ance
[nH
]
frequency[GHz]
Parametrul L
L
Figura 5.34: Inductivitatea bobinei
obtinuta cu ASITIC
0
5
10
15
20
25
0 5 10 15 20 25 30 35
qu
alit
y f
acto
r
frequency[GHz]
Factorul de calitate: Q
Q-port1Q-port1-port2
Q-port2
Figura 5.35: Factorul de calitate Q
obtinut cu ASITIC
Analiza bobinei s-a efectuat pe banda de frecventa 1GHz - 40GHz. Iar ın urma simularii
s-au obtinut valorile parametrului de ımprastiere S. Aceste valori au fost comparate cu
valorile obtinute ın urma simularii cu FIT (fig.5.36 - fig.5.39).
In tabelul 5.5 sunt trecute toate valorile inductivitatilor, ın curent continuu, obtinute
ın urma masuratorilor, prin rezolvarea cu FIT, rezolvarea cu ASITIC si valoarea in-
ductivitatii calculata cu ajutorului unui program pus la dispozitie de Universtitatea din
Stanford [7].
Masurari FIT Asitic Stanford
L 2.961 ÷ 2.995nH 2.53612nH 3.071nH 3.14 nH
Tabelul 5.5: Valorile inductivitatii
58

5.2. Modelarea bobinei 59
0 5 10 15 20 25 30 35 400
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Frequency [GHZ]
Re
al p
art
in =
1 o
ut
=1
−−
−S
d−SP−SMALL−1−111−SRI.s2pasitic.s2pabsolute error
Figura 5.36: FIT vs. ASITIC -
real S11
0 5 10 15 20 25 30 35 40−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
Frequency [GHZ]
Ima
gin
ary
pa
rt in
=1
ou
t =
1−
−−
S
d−SP−SMALL−1−111−SRI.s2pasitic.s2pabsolute error
Figura 5.37: FIT vs. ASITIC -
imaginar S11
0 5 10 15 20 25 30 35 400
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Frequency [GHZ]
Re
al p
art
in =
1 o
ut
=2
−−
−S
d−SP−SMALL−1−111−SRI.s2pasitic.s2pabsolute error
Figura 5.38: FIT vs. ASITIC -
real S12
0 5 10 15 20 25 30 35 40−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
Frequency [GHZ]
Ima
gin
ary
pa
rt in
=1
ou
t =
2−
−−
S
d−SP−SMALL−1−111−SRI.s2pasitic.s2pabsolute error
Figura 5.39: FIT vs. ASITIC -
imaginar S12
5.2.5 Calculul inductivitatii cu ajutorul unui program dezvoltat
la Univeristatea Stanford
In cadrul laboratorului SMIrC (Stanford Microwave Integrated Circuits), din cadrul Uni-
versitatii Stanford [7], a fost realizat un program interactiv de calcul, ın curent continuu,
a inductivitatilor a trei tipuri de inductori spiralati: patrat, hexagonal si octogonal.
Programul foloseste trei expresii de aproximare a inductivitatii: o aproximare bazata
pe formula Wheeler modificata, a doua expresie este bazata pe aproximarea cu panze de
curent, iar ultima se bazeaza pe aproximarea expresiei cu un monom.
1. Formula Wheeler modificata
Wheeler prezinta cateva formule pentru inductor spiral. Printr-o modificare a for-
mulei originale se obtine o expresie valida pentru inductori spiralati integrati:
59

5.2. Modelarea bobinei 60
L = k1µ0 ·n2davg1 + k2ρ
ın care:
• ρ = dout−din
dout+din- proportia de umplere, unde dout diametrul exterior, din diametrul
interior;
• k1, k2 - coeficienti dependenti de layout;
• n - numarul de spire;
• davg = dout+din
2.
2. Expresie bazata pe aproximarea cu panze de curent
O alta expresie a inductivitatii este obtinuta prin aproximarea laturilor spiralei prin
panze de curent simetrice si de densitate de curent echivalente. In cazul unei bobine
patrate, se obtin 4 panze de curent identice. Folosind simetria, calculul inductivitatii
se reduce la evaluarea inductivitatii proprii a unei placi si a celei mutuale ıntre 2
placi opuse. Expresia rezultata este:
L =µn2davgC1
2
(
ln
(
C2
ρ
)
+ C3ρ + C4ρ2
)
ın care coeficientii Ci depind de layout-ul inductorului.
3. Aproximarea cu un monom
Aceasta aproximare se bazeaza pe o metoda de aproximare a inductivitatii L cu o
expresie de tip:
L = βdα1
outwα2dα3
avgnα4sα5
ın care coeficientii β si αi depind de layout. Coeficientii expresiei monomiale se
determina prin logaritmarea expresiei si se obtine:
y = logL = α0 + α1x1 + α2x2 + α3x3 + α4x4 + α5x5,
unde α0 = logβ, x1 = logdout, etc.
Pentru determinarea acestor parametrii s-a folosit o tehnica de aproximare bazata
pe tehnica celor mai mici patrate, aplicata uor date experimentale culese pentru
19000 bobine. Formula a fost validata prin aplicarea ei pentru bobine a caror date
nu au fost folosite ın calculul regresiei.
60
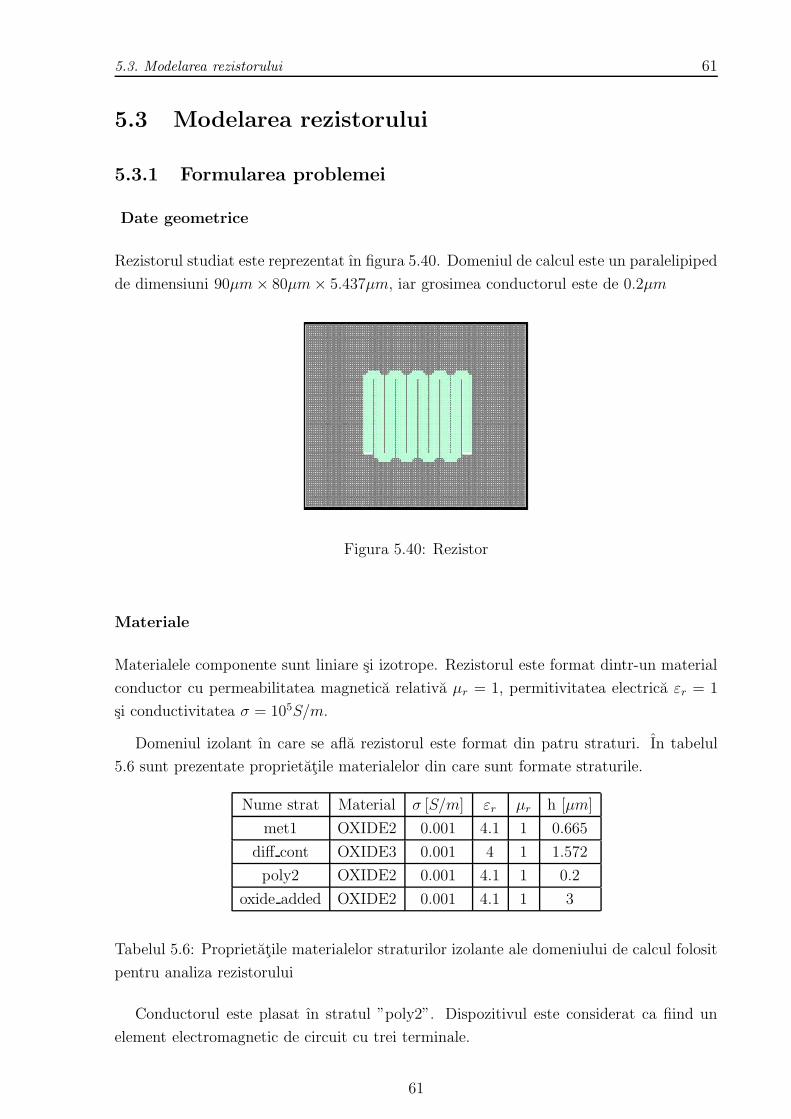
5.3. Modelarea rezistorului 61
5.3 Modelarea rezistorului
5.3.1 Formularea problemei
Date geometrice
Rezistorul studiat este reprezentat ın figura 5.40. Domeniul de calcul este un paralelipiped
de dimensiuni 90µm× 80µm× 5.437µm, iar grosimea conductorul este de 0.2µm
Figura 5.40: Rezistor
Materiale
Materialele componente sunt liniare si izotrope. Rezistorul este format dintr-un material
conductor cu permeabilitatea magnetica relativa µr = 1, permitivitatea electrica εr = 1
si conductivitatea σ = 105S/m.
Domeniul izolant ın care se afla rezistorul este format din patru straturi. In tabelul
5.6 sunt prezentate proprietatile materialelor din care sunt formate straturile.
Nume strat Material σ [S/m] εr µr h [µm]
met1 OXIDE2 0.001 4.1 1 0.665
diff cont OXIDE3 0.001 4 1 1.572
poly2 OXIDE2 0.001 4.1 1 0.2
oxide added OXIDE2 0.001 4.1 1 3
Tabelul 5.6: Proprietatile materialelor straturilor izolante ale domeniului de calcul folosit
pentru analiza rezistorului
Conductorul este plasat ın stratul ”poly2”. Dispozitivul este considerat ca fiind un
element electromagnetic de circuit cu trei terminale.
61

5.3. Modelarea rezistorului 62
Se cere sa se calculeze raspunsul ın frecventa si rezistenta acestui rezistor pentru un
domeniu de frecvente 5GHz-40GHz.
5.3.2 Rezultatele experimentale
Pentru rezistorul prezentat mai sus au fost masurati parametrii de ımprastiere S. Rezul-
tatele otinute ın urma acestor masuratori sunt reprezentate ın figurile 5.41 - 5.44.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
0.75
0.8
0.85
0.9
0.95
1
Frequency [HZ]
Real
par
t in
=1 o
ut =
1−−−
S
RPOLY2−ME−40GHz.s2p
Figura 5.41: Componenta reala a
parametrului S11
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
−0.18
−0.16
−0.14
−0.12
−0.1
−0.08
−0.06
−0.04
−0.02
0
Frequency [HZ]
Imag
inar
y pa
rt in
=1
out =
1−−−
S
RPOLY2−ME−40GHz.s2p
Figura 5.42: Componenta imagi-
nara a parametrului S11
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
−5
0
5
10
15
20x 10
−3
Frequency [HZ]
Real
part
in =1
out
=2−
−−S
RPOLY2−ME−40GHz.s2p
Figura 5.43: Componenta reala a
parametrului S12
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
−12
−10
−8
−6
−4
−2
0
2x 10
−3
Frequency [HZ]
Imag
inary
par
t in =
1 ou
t =2−
−−S
RPOLY2−ME−40GHz.s2p
Figura 5.44: Componenta imagi-
nara a parametrului S12
In figurile 5.45 - 5.48 sunt reprezentate valorile obtinute pentru parametrul R si factorul
de calitate Q ın urma calculului efectuat cu ajutorul formulelor din Anexa C.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
0
1000
2000
3000
4000
5000
6000
frequency [Hz]
Resis
tenc
e [O
hm]
Parameter R − port1 drive
RPOLY2−ME−40GHz.s2p
Figura 5.45: Parametrul R -
port1
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
0
1
2
3
4
5
6
7x 10
−14
frequency [Hz]
Capa
citan
ce [F
]
Parameter C − port1 drive
RPOLY2−ME−40GHz.s2p
Figura 5.46: Factorul de calitate
Q - port1
62

5.3. Modelarea rezistorului 63
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
0
1000
2000
3000
4000
5000
6000
frequency [Hz]
Resis
tenc
e [O
hm]
Parameter R − port12 drive
RPOLY2−ME−40GHz.s2p
Figura 5.47: Parametrul R -
port1 - port2
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2x 10
−14
frequency [Hz]
Capa
citan
ce [F
]
Parameter C − port12 drive
RPOLY2−ME−40GHz.s2p
Figura 5.48: Factorul de calitate
Q - port1 - port2
Aceste rezultate vor fi comparate cu cele obtinute ın urma simularii cu FIT a dispozi-
tivului.
5.3.3 Rezolvarea problemei de camp cu FIT
Reteaua de discretizare (fig5.49) folosita pentru domeniul de calcul are 81×19×5 = 7695
noduri si pasul de discretizare cuprins ıntre 0.001µm si 0.8µm.
Figura 5.49: Vedere 2D a retelei de dis-
cretizareFigura 5.50: Vedere 3D a rezistorului
Deoarece lungimea de unda a campului electromagnetic, ın mediul dielectric, la frecventa
de 40GHz, este λ = 7.5mm, fenomenul de propagare poate fi bine reprezentat cu pasul
ales. Adancimea de patrundere, ın mediul conductor este:
δ =
√
2
ωµσ=
√
2
2π · 40 · 109 · 4π · 10−6 · 105= 2.51µm.
Numarul variabilelor de stare corespunzator acestei retele, ın cazul regimului general
variabil, este n = 25416.
63
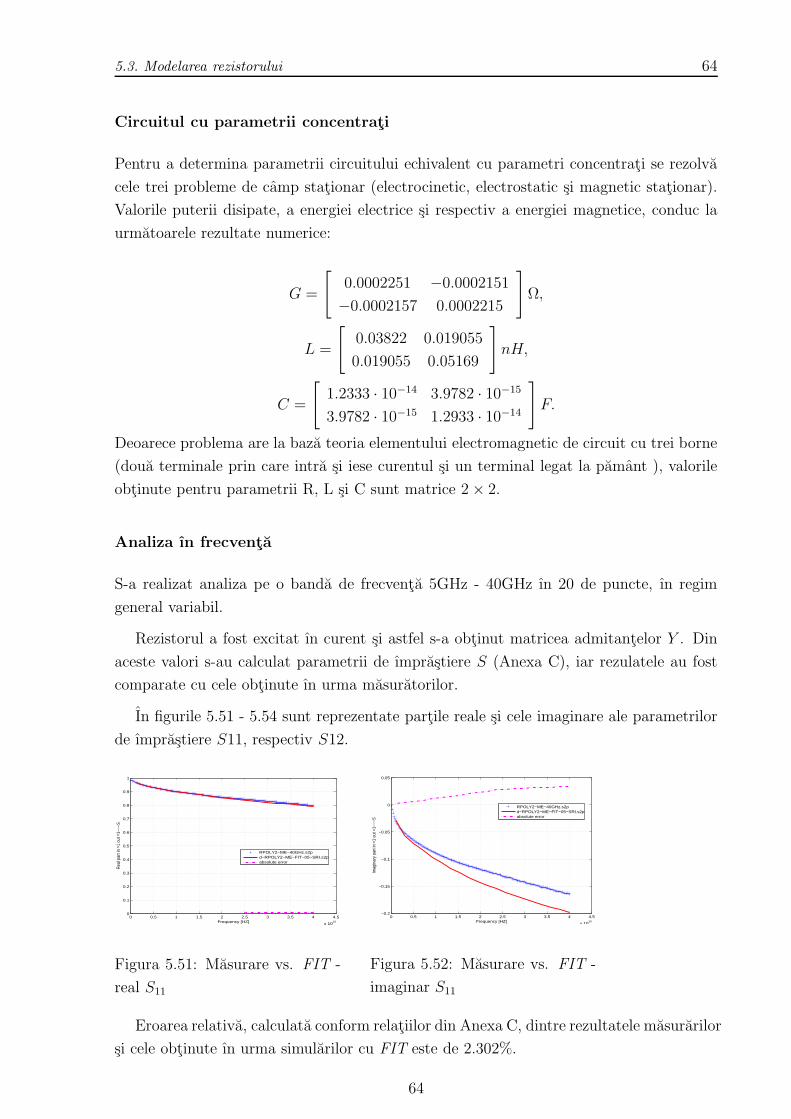
5.3. Modelarea rezistorului 64
Circuitul cu parametrii concentrati
Pentru a determina parametrii circuitului echivalent cu parametri concentrati se rezolva
cele trei probleme de camp stationar (electrocinetic, electrostatic si magnetic stationar).
Valorile puterii disipate, a energiei electrice si respectiv a energiei magnetice, conduc la
urmatoarele rezultate numerice:
G =
[
0.0002251 −0.0002151
−0.0002157 0.0002215
]
Ω,
L =
[
0.03822 0.019055
0.019055 0.05169
]
nH,
C =
[
1.2333 · 10−14 3.9782 · 10−15
3.9782 · 10−15 1.2933 · 10−14
]
F.
Deoarece problema are la baza teoria elementului electromagnetic de circuit cu trei borne
(doua terminale prin care intra si iese curentul si un terminal legat la pamant ), valorile
obtinute pentru parametrii R, L si C sunt matrice 2 × 2.
Analiza ın frecventa
S-a realizat analiza pe o banda de frecventa 5GHz - 40GHz ın 20 de puncte, ın regim
general variabil.
Rezistorul a fost excitat ın curent si astfel s-a obtinut matricea admitantelor Y . Din
aceste valori s-au calculat parametrii de ımprastiere S (Anexa C), iar rezulatele au fost
comparate cu cele obtinute ın urma masuratorilor.
In figurile 5.51 - 5.54 sunt reprezentate partile reale si cele imaginare ale parametrilor
de ımprastiere S11, respectiv S12.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Frequency [HZ]
Rea
l par
t in
=1 o
ut =
1−−−
S
RPOLY2−ME−40GHz.s2pd−RPOLY2−ME−FIT−05−SRI.s2pabsolute error
Figura 5.51: Masurare vs. FIT -
real S11
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
−0.2
−0.15
−0.1
−0.05
0
0.05
Frequency [HZ]
Imag
inar
y pa
rt in
=1
out =
1−−−
S
RPOLY2−ME−40GHz.s2pd−RPOLY2−ME−FIT−05−SRI.s2pabsolute error
Figura 5.52: Masurare vs. FIT -
imaginar S11
Eroarea relativa, calculata conform relatiilor din Anexa C, dintre rezultatele masurarilor
si cele obtinute ın urma simularilor cu FIT este de 2.302%.
64
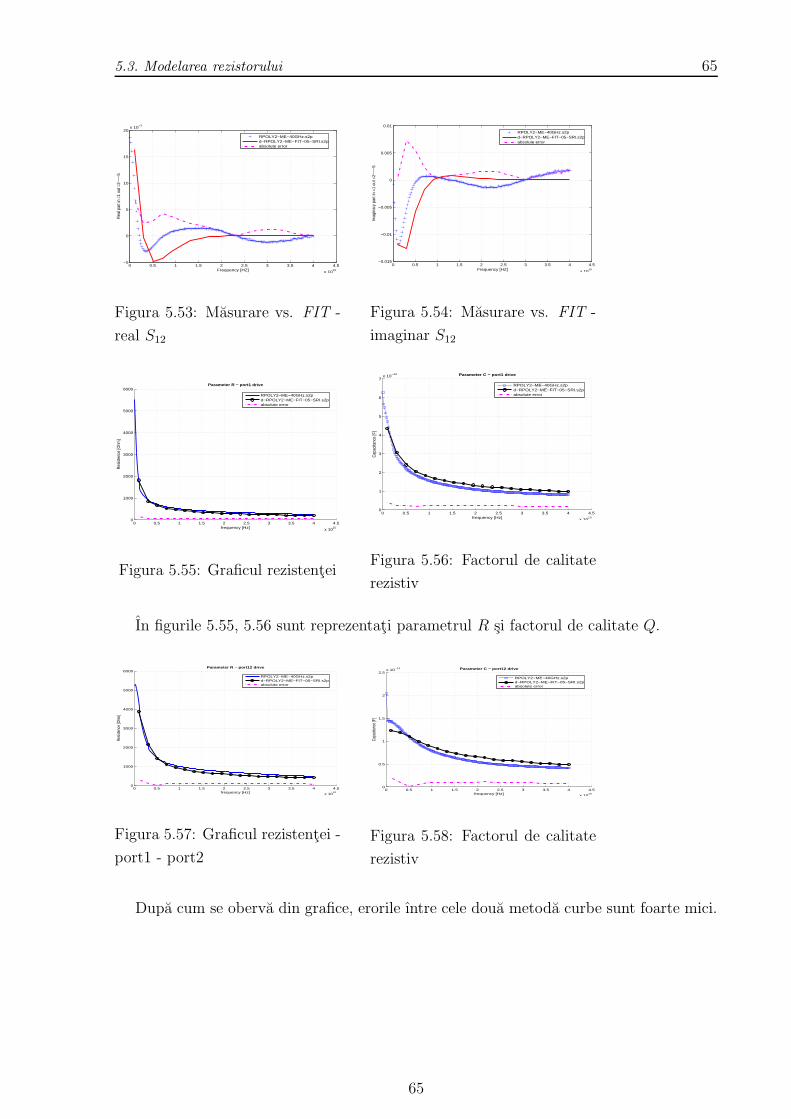
5.3. Modelarea rezistorului 65
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
−5
0
5
10
15
20x 10
−3
Frequency [HZ]
Rea
l par
t in
=1 o
ut =
2−−−
S
RPOLY2−ME−40GHz.s2pd−RPOLY2−ME−FIT−05−SRI.s2pabsolute error
Figura 5.53: Masurare vs. FIT -
real S12
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
−0.015
−0.01
−0.005
0
0.005
0.01
Frequency [HZ]
Imag
inar
y pa
rt in
=1
out =
2−−−
S
RPOLY2−ME−40GHz.s2pd−RPOLY2−ME−FIT−05−SRI.s2pabsolute error
Figura 5.54: Masurare vs. FIT -
imaginar S12
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
0
1000
2000
3000
4000
5000
6000
frequency [Hz]
Res
iste
nce
[Ohm
]
Parameter R − port1 drive
RPOLY2−ME−40GHz.s2pd−RPOLY2−ME−FIT−05−SRI.s2pabsolute error
Figura 5.55: Graficul rezistentei
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
0
1
2
3
4
5
6
7x 10
−14
frequency [Hz]
Cap
acita
nce
[F]
Parameter C − port1 drive
RPOLY2−ME−40GHz.s2pd−RPOLY2−ME−FIT−05−SRI.s2pabsolute error
Figura 5.56: Factorul de calitate
rezistiv
In figurile 5.55, 5.56 sunt reprezentati parametrul R si factorul de calitate Q.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
0
1000
2000
3000
4000
5000
6000
frequency [Hz]
Resis
tenc
e [O
hm]
Parameter R − port12 drive
RPOLY2−ME−40GHz.s2pd−RPOLY2−ME−FIT−05−SRI.s2pabsolute error
Figura 5.57: Graficul rezistentei -
port1 - port2
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 1010
0
0.5
1
1.5
2
2.5x 10
−14
frequency [Hz]
Capa
citan
ce [F
]
Parameter C − port12 drive
RPOLY2−ME−40GHz.s2pd−RPOLY2−ME−FIT−05−SRI.s2pabsolute error
Figura 5.58: Factorul de calitate
rezistiv
Dupa cum se oberva din grafice, erorile ıntre cele doua metoda curbe sunt foarte mici.
65

5.4. Modelarea linie de transmisie 66
5.4 Modelarea linie de transmisie
5.4.1 Formularea problemei
Date geometrice
Linia de transmisie are domeniul de calcul un paralelipiped de dimensiuni 8200µm ×46.588µm× 18.74µm. In figura 5.59 este reprezentat layout-ul liniei lungi.
Figura 5.59: Linie de transmisie
Materiale
Materialul conductor al liniei de transmisie este aluminiul cu urmatoarele proprietati:
permitivitatea electrica relativa εr = 1, permeabilitatea magnetica relativa µr = 1 si
conductivitatea σ = 6.6 · 107S/m.
Domeniul de calcul folosit pentru analiza liniei de transmisie este format din materialele
izolante din tabelul 5.7. Materialele sunt toate izotrope si liniare.
Nume strat Material σ [S/m] εr µr h [µm]
miu1 ALUM2 100 2 2 1.5
AIR AIR 0.001 1 1 3
TOP PASS 0.001 3.9 1 0.69
VIA OXIDE 0.001 3.9 1 1
GROUND OXIDE 0.001 3.9 1 1
SI3N4 SI3N4 0.001 7.5 1 0.5
SUBSTRATE Silicon Metal 10000 1 1 3
miu2 ALUM1 6.6·107 2 2 1.5
Si-out Silicon Metal 10000 1 1 7
Tabelul 5.7: Proprietatile materialelor straturilor izolante ale liniei de transmisie
La fel ca ın problemele precedente se cere sa se calculeze raspunsul ın frecventa si
parametrii acestui dispozitiv pentru o banda de frecventa 1GHz-30GHz.
66
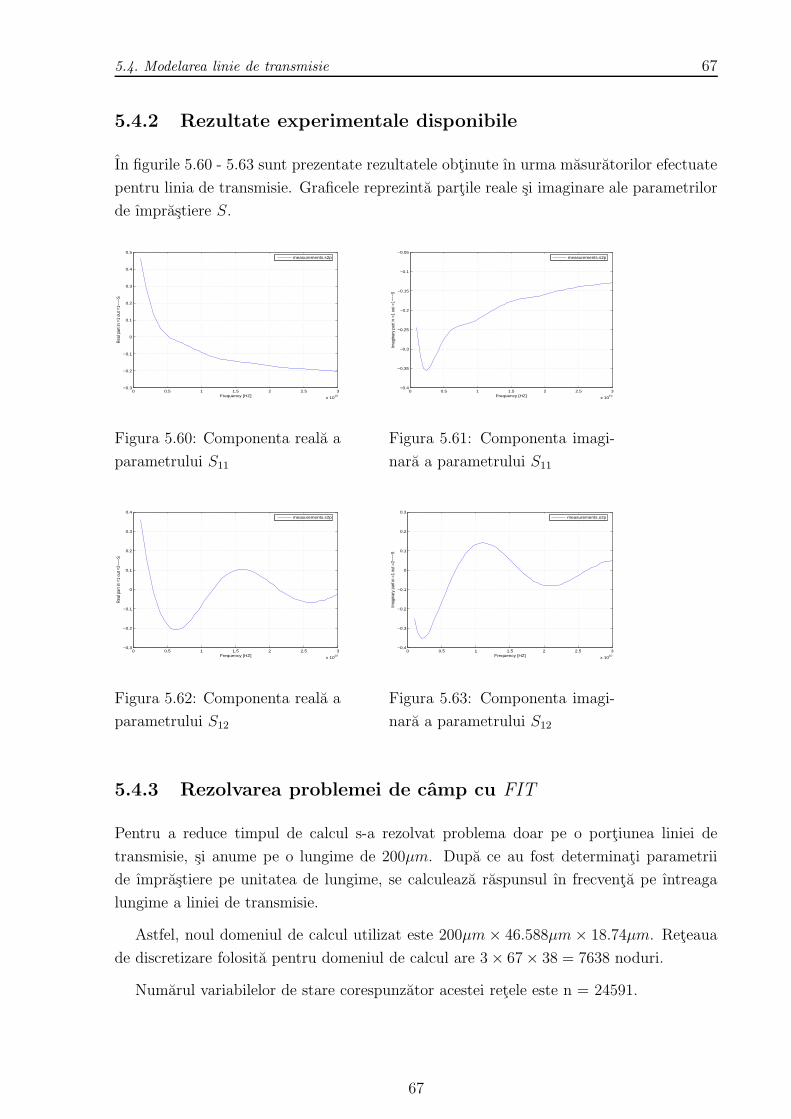
5.4. Modelarea linie de transmisie 67
5.4.2 Rezultate experimentale disponibile
In figurile 5.60 - 5.63 sunt prezentate rezultatele obtinute ın urma masuratorilor efectuate
pentru linia de transmisie. Graficele reprezinta partile reale si imaginare ale parametrilor
de ımprastiere S.
0 0.5 1 1.5 2 2.5 3
x 1010
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
Frequency [HZ]
Rea
l par
t in
=1 o
ut =
1−−−
S
measurements.s2p
Figura 5.60: Componenta reala a
parametrului S11
0 0.5 1 1.5 2 2.5 3
x 1010
−0.4
−0.35
−0.3
−0.25
−0.2
−0.15
−0.1
−0.05
Frequency [HZ]Im
agin
ary
part
in =
1 ou
t =1−
−−S
measurements.s2p
Figura 5.61: Componenta imagi-
nara a parametrului S11
0 0.5 1 1.5 2 2.5 3
x 1010
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
Frequency [HZ]
Rea
l par
t in
=1 o
ut =
2−−−
S
measurements.s2p
Figura 5.62: Componenta reala a
parametrului S12
0 0.5 1 1.5 2 2.5 3
x 1010
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
Frequency [HZ]
Imag
inar
y pa
rt in
=1
out =
2−−−
S
measurements.s2p
Figura 5.63: Componenta imagi-
nara a parametrului S12
5.4.3 Rezolvarea problemei de camp cu FIT
Pentru a reduce timpul de calcul s-a rezolvat problema doar pe o portiunea liniei de
transmisie, si anume pe o lungime de 200µm. Dupa ce au fost determinati parametrii
de ımprastiere pe unitatea de lungime, se calculeaza raspunsul ın frecventa pe ıntreaga
lungime a liniei de transmisie.
Astfel, noul domeniul de calcul utilizat este 200µm× 46.588µm× 18.74µm. Reteaua
de discretizare folosita pentru domeniul de calcul are 3 × 67 × 38 = 7638 noduri.
Numarul variabilelor de stare corespunzator acestei retele este n = 24591.
67
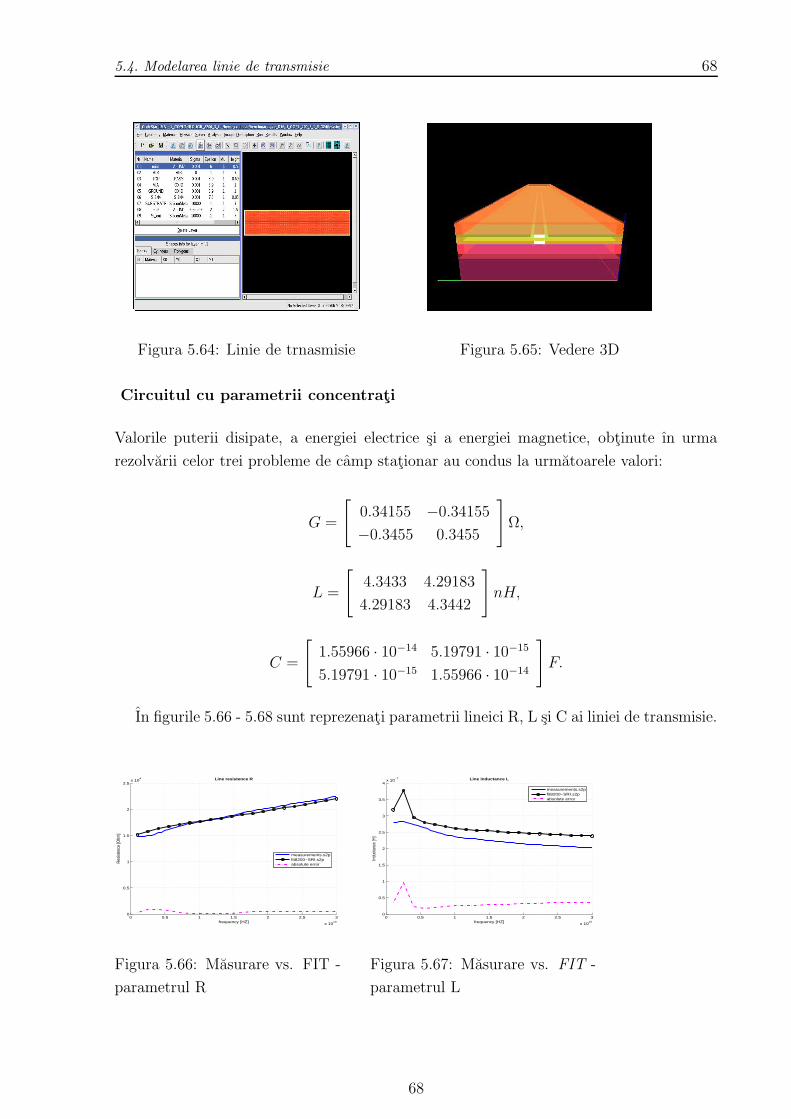
5.4. Modelarea linie de transmisie 68
Figura 5.64: Linie de trnasmisie Figura 5.65: Vedere 3D
Circuitul cu parametrii concentrati
Valorile puterii disipate, a energiei electrice si a energiei magnetice, obtinute ın urma
rezolvarii celor trei probleme de camp stationar au condus la urmatoarele valori:
G =
[
0.34155 −0.34155
−0.3455 0.3455
]
Ω,
L =
[
4.3433 4.29183
4.29183 4.3442
]
nH,
C =
[
1.55966 · 10−14 5.19791 · 10−15
5.19791 · 10−15 1.55966 · 10−14
]
F.
In figurile 5.66 - 5.68 sunt reprezenati parametrii lineici R, L si C ai liniei de transmisie.
0 0.5 1 1.5 2 2.5 3
x 1010
0
0.5
1
1.5
2
2.5x 10
4
frequency [HZ]
Res
iste
nce
[Ohm
]
Line resistence R
measurements.s2pfit8200−SRI.s2pabsolute error
Figura 5.66: Masurare vs. FIT -
parametrul R
0 0.5 1 1.5 2 2.5 3
x 1010
0
0.5
1
1.5
2
2.5
3
3.5
4x 10
−7
frequency [HZ]
Indu
ctan
ce [H
]
Line inductance L
measurements.s2pfit8200−SRI.s2pabsolute error
Figura 5.67: Masurare vs. FIT -
parametrul L
68
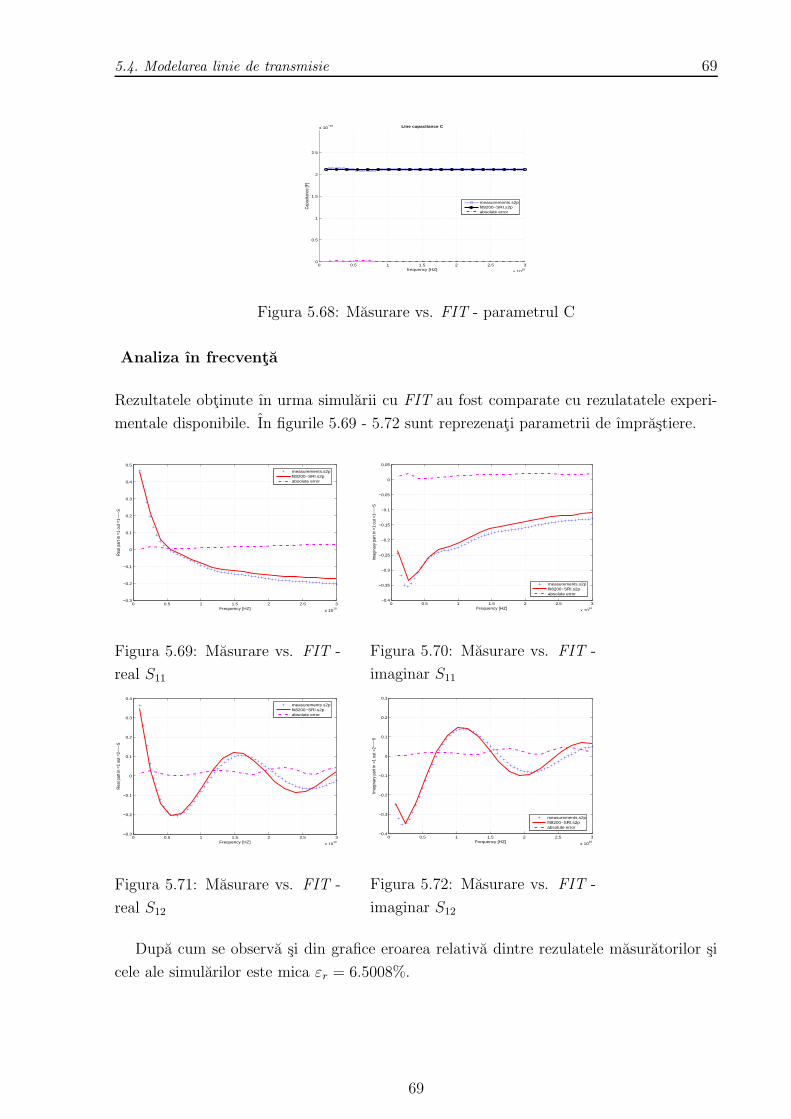
5.4. Modelarea linie de transmisie 69
0 0.5 1 1.5 2 2.5 3
x 1010
0
0.5
1
1.5
2
2.5
x 10−10
frequency [HZ]
Cap
acita
nce
[F]
Line capacitance C
measurements.s2pfit8200−SRI.s2pabsolute error
Figura 5.68: Masurare vs. FIT - parametrul C
Analiza ın frecventa
Rezultatele obtinute ın urma simularii cu FIT au fost comparate cu rezulatatele experi-
mentale disponibile. In figurile 5.69 - 5.72 sunt reprezenati parametrii de ımprastiere.
0 0.5 1 1.5 2 2.5 3
x 1010
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
Frequency [HZ]
Rea
l par
t in
=1 o
ut =
1−−−
S
measurements.s2pfit8200−SRI.s2pabsolute error
Figura 5.69: Masurare vs. FIT -
real S11
0 0.5 1 1.5 2 2.5 3
x 1010
−0.4
−0.35
−0.3
−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
Frequency [HZ]
Imag
inar
y pa
rt in
=1
out =
1−−−
S
measurements.s2pfit8200−SRI.s2pabsolute error
Figura 5.70: Masurare vs. FIT -
imaginar S11
0 0.5 1 1.5 2 2.5 3
x 1010
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
Frequency [HZ]
Rea
l par
t in
=1 o
ut =
2−−−
S
measurements.s2pfit8200−SRI.s2pabsolute error
Figura 5.71: Masurare vs. FIT -
real S12
0 0.5 1 1.5 2 2.5 3
x 1010
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
Frequency [HZ]
Imag
inar
y pa
rt in
=1
out =
2−−−
S
measurements.s2pfit8200−SRI.s2pabsolute error
Figura 5.72: Masurare vs. FIT -
imaginar S12
Dupa cum se observa si din grafice eroarea relativa dintre rezulatele masuratorilor si
cele ale simularilor este mica εr = 6.5008%.
69

Capitolul 6
Concluzii
• Proiectul prezinta corelarea cantitativa dintre rezultatele obtinute ın urma masurarii
si cele obtinute ın urma simularii unor componente pasive de pe cipuri: o bobina,
un rezistor, o linie de transmisie.
• Metoda integrarilor finite (FIT), utilizata de programul de simulare CODESTAR se
dovedeste a fi o metoda de simulare eficienta. In cazul metodei FIT se discretizeaza
forma integrala a ecuatiilor campului electromagnetic ın regim general variabil si
se obtine ın final un sistem liniar de ecuatii. Formularea problemei este cea core-
spunzatoare elementului electromagnetic de circuit, conform teoremei R. Radulet.
• Pentru a modela efectul pelicular, ın metoda numerica FIT, discretizarea folosita
trebuie sa fie adecvata.
• ASITIC se dovedeste a fi un program foarte rapid de analiza si proiectare a bobinelor
si transformatoarelor din circuitele integrate ce functioneaza la frecvente ridicate.
Principalul dezavantaj este ca ASITIC poate fi folosit doar la analiza unei clase
limitate de configuratii.
• Programul dezvoltat la Stanford reprezinta o metoda foarte rapida de a estima
inductivitatea bobinelor spiralate: patrate, hexagonale si octogonale.
• Pentru a obtine rezultate acceptabile trebuie gasiti parametrii optimi pentru mod-
elarea unei structuri. Astfel cei mai importanti parametri: numarul de noduri al
retelei de discretizare si marimea domeniului de calcul, influenteaza ın mod pozitiv
rezultatele simularilor.
• Rezultate similare obtinute ın urma simularilor cu programul CODESTAR pentru
mai multe structuri de test, de acelasi tip, au fost prezentate si ın [9], [10].
70
Anexa A
Fisierul xml
<?xml version="1.0" encoding="UTF-8"?>
<structure>
<header>
<formatVersion>1</formatVersion>
<modelName>SP SMALL</modelName>
<modelVersion>1</modelVersion>
<shortDescription>SP SMALL</shortDescription>
<modelDescription>here comes the description
of the model</modelDescription>
<author>here comes the author</author>
<date>22/4/2005</date>
</header>
<geometry>
<title>SP SMALL GDS</title>
<size>
<x>0.00033045</x>
<y>0.00034015</y>
<z>0.000195617</z>
</size>
<layer>
<name>air</name>
<height>9.025e-05</height>
<material>AIR</material>
</layer>
<layer>
<name>nbur</name>
<height>1e-06</height>
<material>SUB1</material>
71
72
</layer>
<layer>
<name>coll sink</name>
<height>1.5e-06</height>
<material>SUB1</material>
</layer>
<layer>
<name>n-well</name>
<height>3e-06</height>
<material>SUB4</material>
</layer>
<layer>
<name>ndiff1</name>
<height>3e-07</height>
<material>SUB1</material>
</layer>
<layer>
<name>pdiff1</name>
<height>3e-07</height>
<material>SUB1</material>
</layer>
<layer>
<name>diff cont</name>
<height>1.572e-06</height>
<material>OXIDE3</material>
</layer>
<layer>
<name>m1V1m2V2</name>
<height>3.305e-06</height>
<material>OXIDE2</material>
</layer>
<layer>
<name>met3</name>
<height>6.4e-07</height>
<material>OXIDE2</material>
<brick>
<point>
<x>9.025e-05</x>
<y>0</y>
</point>
<point>
72

73
<x>9.525e-05</x>
<y>0.000105</y>
</point>
<material>ALUM2</material>
</brick>
<brick>
<point>
<x>0.00021125</x>
<y>0</y>
</point>
<point>
<x>0.00021625</x>
<y>0.0001337</y>
</point>
<material>ALUM2</material>
</brick>
</layer>
<layer>
<name>via3</name>
<height>1e-06</height>
<material>OXIDE2</material>
<brick>
<point>
<x>9.025e-05</x>
<y>0.0001</y>
</point>
<point>
<x>9.525e-05</x>
<y>0.000105</y>
</point>
<material>TUN1</material>
</brick>
<brick>
<point>
<x>0.00021125</x>
<y>0.000129</y>
</point>
<point>
<x>0.00021625</x>
<y>0.0001337</y>
</point>
73

74
<material>TUN1</material>
</brick>
</layer>
<layer>
<name>met4</name>
<height>2.5e-06</height>
<material>AIR</material>
<brick>
<point>
<x>9.025e-05</x>
<y>0.0001</y>
</point>
<point>
<x>9.525e-05</x>
<y>0.00025</y>
</point>
<material>ALUM1</material>
</brick>
<brick>
<point>
<x>9.525e-05</x>
<y>0.000245</y>
</point>
<point>
<x>0.00024025</x>
<y>0.00025</y>
</point>
<material>ALUM1</material>
</brick>
<brick>
<point>
<x>0.00023525</x>
<y>0.0001</y>
</point>
<point>
<x>0.00024025</x>
<y>0.000245</y>
</point>
<material>ALUM1</material>
</brick>
<brick>
74
75
<point>
<x>9.825e-05</x>
<y>0.0001</y>
</point>
<point>
<x>0.00023525</x>
<y>0.000105</y>
</point>
<material>ALUM1</material>
</brick>
<brick>
<point>
<x>9.825e-05</x>
<y>0.000105</y>
</point>
<point>
<x>0.00010325</x>
<y>0.000242</y>
</point>
<material>ALUM1</material>
</brick>
<brick>
<point>
<x>0.00010325</x>
<y>0.000237</y>
</point>
<point>
<x>0.00023225</x>
<y>0.000242</y>
</point>
<material>ALUM1</material>
</brick>
<brick>
<point>
<x>0.00022725</x>
<y>0.000108</y>
</point>
<point>
<x>0.00023225</x>
<y>0.000237</y>
</point>
75
76
<material>ALUM1</material>
</brick>
<brick>
<point>
<x>0.00010625</x>
<y>0.000108</y>
</point>
<point>
<x>0.00022725</x>
<y>0.000113</y>
</point>
<material>ALUM1</material>
</brick>
<brick>
<point>
<x>0.00010625</x>
<y>0.000113</y>
</point>
<point>
<x>0.00011125</x>
<y>0.000234</y>
</point>
<material>ALUM1</material>
</brick>
<brick>
<point>
<x>0.00011125</x>
<y>0.000229</y>
</point>
<point>
<x>0.00022425</x>
<y>0.000234</y>
</point>
<material>ALUM1</material>
</brick>
<brick>
<point>
<x>0.00021925</x>
<y>0.000116</y>
</point>
<point>
76

77
<x>0.00022425</x>
<y>0.000229</y>
</point>
<material>ALUM1</material>
</brick>
<brick>
<point>
<x>0.00011425</x>
<y>0.000116</y>
</point>
<point>
<x>0.00021925</x>
<y>0.000121</y>
</point>
<material>ALUM1</material>
</brick>
<brick>
<point>
<x>0.00011425</x>
<y>0.000121</y>
</point>
<point>
<x>0.00011925</x>
<y>0.000226</y>
</point>
<material>ALUM1</material>
</brick>
<brick>
<point>
<x>0.00011925</x>
<y>0.000221</y>
</point>
<point>
<x>0.00021625</x>
<y>0.000226</y>
</point>
<material>ALUM1</material>
</brick>
<brick>
<point>
<x>0.00021125</x>
77
78
<y>0.000129</y>
</point>
<point>
<x>0.00021625</x>
<y>0.000221</y>
</point>
<material>ALUM1</material>
</brick>
</layer>
<layer>
<name>air</name>
<height>9.025e-05</height>
<material>AIR</material>
</layer>
<contact>
<contactRectangle>
<name>c1</name>
<position>top</position>
<point>
<x>9.025e-05</x>
<y>0</y>
<z>0.000101227</z>
</point>
<point>
<x>9.525e-05</x>
<y>0</y>
<z>0.000101867</z>
</point>
</contactRectangle>
</contact>
<contact>
<contactRectangle>
<name>c2</name>
<position>top</position>
<point>
<x>0.00021125</x>
<y>0</y>
<z>0.000101227</z>
</point>
<point>
<x>0.00021625</x>
78

79
<y>0</y>
<z>0.000101867</z>
</point>
</contactRectangle>
</contact>
<contact>
<contactRectangle>
<name>ground</name>
<position>top</position>
<point>
<x>0</x>
<y>0</y>
<z>0</z>
</point>
<point>
<x>0.00033015</x>
<y>0.00034015</y>
<z>0</z>
</point>
</contactRectangle>
</contact>
</geometry>
<physics>
<boundary>
<position>top</position>
<type>ECE</type>
</boundary>
<boundary>
<position>bottom</position>
<type>ECE</type>
</boundary>
<boundary>
<position>left</position>
<type>ECE</type>
</boundary>
<boundary>
<position>right</position>
<type>ECE</type>
</boundary>
<boundary>
<position>front</position>
79

80
<type>ECE</type>
</boundary>
<boundary>
<position>back</position>
<type>ECE</type>
</boundary>
<materials>
<material>
<name>SUB1</name>
<color>15</color>
<shortname>SUB1</shortname>
<type>CONDUCTOR</type>
<conductorProperties>
<mu>1</mu>
<epsilon>1</epsilon>
<sigma>5</sigma>
</conductorProperties>
</material>
<material>
<name>SUB4</name>
<color>4</color>
<shortname>SUB4</shortname>
<type>CONDUCTOR</type>
<conductorProperties>
<mu>1</mu>
<epsilon>1</epsilon>
<sigma>156</sigma>
</conductorProperties>
</material>
<material>
<name>OXIDE3</name>
<color>15</color>
<shortname>OXIDE3</shortname>
<type>INSULATOR</type>
<insulatorProperties>
<mu>1</mu>
<epsilon>4</epsilon>
<loss>0</loss>
</insulatorProperties>
</material>
<material>
80

81
<name>OXIDE2</name>
<color>15</color>
<shortname>OXIDE2</shortname>
<type>INSULATOR</type>
<insulatorProperties>
<mu>1</mu>
<epsilon>4.1</epsilon>
<loss>0</loss>
</insulatorProperties>
</material>
<material>
<name>ALUM2</name>
<color>9</color>
<shortname>ALUM2</shortname>
<type>CONDUCTOR</type>
<conductorProperties>
<mu>1</mu>
<epsilon>1</epsilon>
<sigma>1.25e+07</sigma>
</conductorProperties>
</material>
<material>
<name>TUN1</name>
<color>11</color>
<shortname>TUN1</shortname>
<type>CONDUCTOR</type>
<conductorProperties>
<mu>1</mu>
<epsilon>1</epsilon>
<sigma>3.33e+06</sigma>
</conductorProperties>
</material>
<material>
<name>ALUM1</name>
<color>9</color>
<shortname>ALUM1</shortname>
<type>CONDUCTOR</type>
<conductorProperties>
<mu>1</mu>
<epsilon>1</epsilon>
<sigma>6.6e+07</sigma>
81

82
</conductorProperties>
</material>
<material>
<name>AIR</name>
<color>16</color>
<shortname>AIR</shortname>
<type>INSULATOR</type>
<insulatorProperties>
<mu>1</mu>
<epsilon>1</epsilon>
<loss>0</loss>
</insulatorProperties>
</material>
</materials>
</physics>
<solver>
<mesh>
<nonUniformMesh>
<x>0</x>
<x>7.35137e-05</x>
<x>8.64446e-05</x>
<x>9.025e-05</x>
<x>9.525e-05</x>
<x>9.825e-05</x>
<x>0.00010325</x>
<x>0.00010625</x>
<x>0.00011125</x>
<x>0.00011425</x>
<x>0.00011925</x>
<x>0.000123944</x>
<x>0.000168556</x>
<x>0.000207349</x>
<x>0.00021125</x>
<x>0.00021625</x>
<x>0.00021925</x>
<x>0.00022425</x>
<x>0.00022725</x>
<x>0.00023225</x>
<x>0.00023525</x>
<x>0.00024025</x>
<x>0.000244849</x>
82
83
<x>0.000259719</x>
<x>0.00033015</x>
<x>0.00033045</x>
<y>0</y>
<y>7.70472e-05</y>
<y>9.4504e-05</y>
<y>0.0001</y>
<y>0.000105</y>
<y>0.000108</y>
<y>0.000113</y>
<y>0.000116</y>
<y>0.000121</y>
<y>0.000129</y>
<y>0.0001337</y>
<y>0.000174676</y>
<y>0.000210236</y>
<y>0.000216055</y>
<y>0.000221</y>
<y>0.000226</y>
<y>0.000229</y>
<y>0.000234</y>
<y>0.000237</y>
<y>0.000242</y>
<y>0.000245</y>
<y>0.00025</y>
<y>0.000254201</y>
<y>0.000272951</y>
<y>0.00034015</y>
<z>0</z>
<z>9.025e-05</z>
<z>9.125e-05</z>
<z>9.275e-05</z>
<z>9.575e-05</z>
<z>9.605e-05</z>
<z>9.635e-05</z>
<z>9.7922e-05</z>
<z>0.000101227</z>
<z>0.000101867</z>
<z>0.000102867</z>
<z>0.000105367</z>
<z>0.000195617</z>
83
84
</nonUniformMesh>
<preRefine>
<nx>0</nx>
<ny>0</ny>
<nz>1</nz>
</preRefine>
<maxStep>3e-06</maxStep>
</mesh>
<lmn>
</lmn>
<solutionMethod>FIT</solutionMethod>
</solver>
<analysis>
<frequency>
<regime>111</regime>
<min>5e+09</min>
<max>4e+10</max>
<samples>20</samples>
</frequency>
<distributedSystem>
<sys>d SP SMALL 1 111 nou.sys</sys>
<snp>d SP SMALL 1 111 nou.s2p</snp>
</distributedSystem>
</analysis>
<copyright>
<status>PUBLIC</status>
<partner>AMS</partner>
<author>CODESTAR</author>
<version>2004</version>
</copyright>
</structure>
84

Anexa B
Fisierul tek
;SP SMALL
<chip>
chipx = 330.45 ; dimensions of the chip in x direction
chipy = 340.15 ; dimensions of the chip in y direction
fftx = 256 ; x-fft size (must be a power of 2)
ffty = 256 ; y-fft size
TechFile = small.tek
TechPath = .
freq = .1
eddy = 0
eddy = 1
<layer> 0 ; air(AIR)
rho = 1e+05 ; ohm-cm
t = 90.25 ; microns
eps = 1
<layer> 1 ; nbur(SUB1)
rho = 20
t = 1
eps = 1
<layer> 2 ; coll sink(SUB1)
rho = 20
t = 1.5
eps = 1
<layer> 3 ; n well(SUB4)
rho = 0.64
t = 3
eps = 1
<layer> 4 ; ndiff1(SUB1)
85
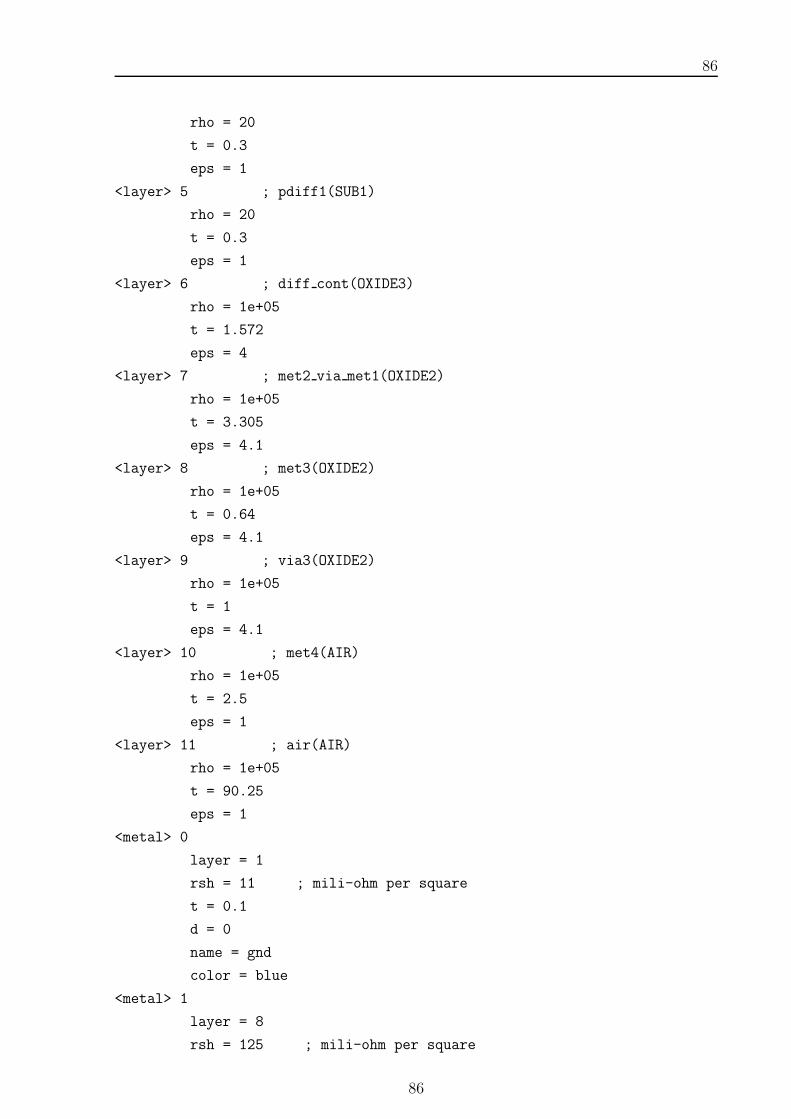
86
rho = 20
t = 0.3
eps = 1
<layer> 5 ; pdiff1(SUB1)
rho = 20
t = 0.3
eps = 1
<layer> 6 ; diff cont(OXIDE3)
rho = 1e+05
t = 1.572
eps = 4
<layer> 7 ; met2 via met1(OXIDE2)
rho = 1e+05
t = 3.305
eps = 4.1
<layer> 8 ; met3(OXIDE2)
rho = 1e+05
t = 0.64
eps = 4.1
<layer> 9 ; via3(OXIDE2)
rho = 1e+05
t = 1
eps = 4.1
<layer> 10 ; met4(AIR)
rho = 1e+05
t = 2.5
eps = 1
<layer> 11 ; air(AIR)
rho = 1e+05
t = 90.25
eps = 1
<metal> 0
layer = 1
rsh = 11 ; mili-ohm per square
t = 0.1
d = 0
name = gnd
color = blue
<metal> 1
layer = 8
rsh = 125 ; mili-ohm per square
86

87
t = 0.64
d = 0
name = alum2
color = green
<metal> 2
layer = 10
rsh = 6.1
t = 2.5
d = 0
name = alum1
color = red
<via> 0
top = 2 ; top metal layer
bottom = 1 ; bottom metal layer
r = 0.00076 ; resistance per via [Ohms]
width = 5 ; width of via
space = 1 ; spacing btwn vias
overplot1 = .05 ; min spacing to metal layers
overplot2 = .05
name = tun1
color = white
87

Anexa C
Relatii utile
Parametrul de ımprastiere
Parametrul de ımprastiere (S) reprezinta o interdepandenta ıntre semnalele de intrare si
cele de iesre ale unui dispzitiv multiport. Unele dintre avantajele utilizarii parametrilor
de ımprastiere sunt:
• sunt usor de masurat si de obtinut la frecvente mari, ın comparatie cu alti parametrii;
• toate circuitele cu parametrii concentrati au o descreiere analitica unica a parametru-
lui S;
[
y1
y2
]
=
[
S11 S12
S21 S22
][
u1
u2
]
Semnalele de intrare si de iesire, u1 si y1 pentru portul 1, respectiv u2 si y2 pentru
portul 2 sunt definite ın functie de potentialele V1, V2, curentii I1, I2 si o impedanta de
referinta Z0, astfel:
u1 = V1+Z0I12√Z0
u2 = V2−Z0I22√Z0
y1 = V1−Z0I12√Z0
y2 = V2+Z0I22√Z0
In practica, impedanta de referinta Z0 este aleasa 50Ω.
La frecvente mai mici sunt folosite matricele de transfer si cea a impedantelor, ınsa
la frecvente mai mari acestea devin greu de masurat si de aceea se prefera matricea
parametrilor S.
Parametrii de ımprastiere sunt masurati prin conectarea dispozitivului studiat la o
linie de transmisie care are terminalele conectate la un analizator de retea. Un analizator
de retea obisnuit poate masura parametrii S la o banda de frecventa mare (de exemplu:
50MHz - 40GHz).
88
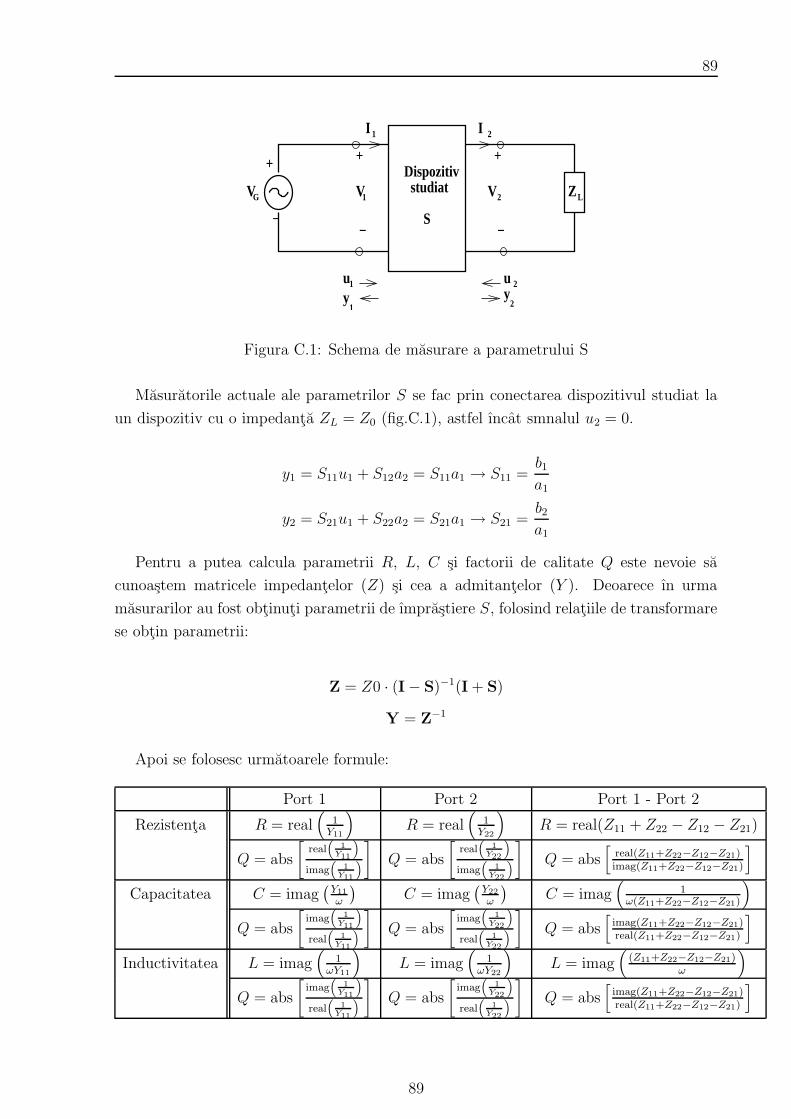
89
I 1 I 2
GV ZLV2V1
u 2y
2
u1
y1
Dispozitiv studiat
S
+
−
+
−
+
−
Figura C.1: Schema de masurare a parametrului S
Masuratorile actuale ale parametrilor S se fac prin conectarea dispozitivul studiat la
un dispozitiv cu o impedanta ZL = Z0 (fig.C.1), astfel ıncat smnalul u2 = 0.
y1 = S11u1 + S12a2 = S11a1 → S11 =b1a1
y2 = S21u1 + S22a2 = S21a1 → S21 =b2a1
Pentru a putea calcula parametrii R, L, C si factorii de calitate Q este nevoie sa
cunoastem matricele impedantelor (Z) si cea a admitantelor (Y ). Deoarece ın urma
masurarilor au fost obtinuti parametrii de ımprastiere S, folosind relatiile de transformare
se obtin parametrii:
Z = Z0 · (I − S)−1(I + S)
Y = Z−1
Apoi se folosesc urmatoarele formule:
Port 1 Port 2 Port 1 - Port 2
Rezistenta R = real(
1Y11
)
R = real(
1Y22
)
R = real(Z11 + Z22 − Z12 − Z21)
Q = abs
[
real“
1
Y11
”
imag“
1
Y11
”
]
Q = abs
[
real“
1
Y22
”
imag“
1
Y22
”
]
Q = abs[
real(Z11+Z22−Z12−Z21)imag(Z11+Z22−Z12−Z21)
]
Capacitatea C = imag(
Y11
ω
)
C = imag(
Y22
ω
)
C = imag(
1ω(Z11+Z22−Z12−Z21)
)
Q = abs
[
imag“
1
Y11
”
real“
1
Y11
”
]
Q = abs
[
imag“
1
Y22
”
real“
1
Y22
”
]
Q = abs[
imag(Z11+Z22−Z12−Z21)real(Z11+Z22−Z12−Z21)
]
Inductivitatea L = imag(
1ωY11
)
L = imag(
1ωY22
)
L = imag(
(Z11+Z22−Z12−Z21)ω
)
Q = abs
[
imag“
1
Y11
”
real“
1
Y11
”
]
Q = abs
[
imag“
1
Y22
”
real“
1
Y22
”
]
Q = abs[
imag(Z11+Z22−Z12−Z21)real(Z11+Z22−Z12−Z21)
]
89

90
Norma Frobenius
Norma Frobenius a unei matrice complexe A de dimensiune n×m este
‖A‖F =
√
√
√
√
m∑
j=1
bjj, (C.1)
unde bjj este un element diagonal al matricei complexe B de dimensiune m×m, data de
B = AHA, (C.2)
unde AH = AT ∗.
Un calcul simplu conduce la
bjj =
n∑
i=1
a∗ijaij =
n∑
i=1
|aij|2, (C.3)
de unde
‖A‖F =
√
√
√
√
m∑
j=1
n∑
i=1
|aij|2. (C.4)
Norma Frobenius a unei matrice este deci radical din suma patratelor modulelor tuturor
elementelor matricei.
90
Bibliografie
[1] C. Mocanu, Bazele electrotehnicii. Teoria campului electromagnetic, Ed. Didactica si
Pedagogica, Bucuresti, 1984.
[2] www.imec.be/codestar.
[3] D. Ioan, G. Ciuprina, C. Ciubotaru, M. Radulescu, M. Piper, F. Ciuprina, Raport
Codestar D8/2004 - Report on the usability and adaptation of FIT to solve the field
problem, LMN 2003.
[4] http://rfic.eecs.berkeley.edu/ niknejad/asitic.html.
[5] Ali M. Niknejad, Analysis, Desing, And Optimization Of Spiral Inductors And Trans-
formers For Si RF ICs, Master of Philosophy in Engineering - Electrical Engeneering
and Computer Sciences, University of California, Berkeley.
[6] R. Gharpurey, Modeling and analysis of substrate coupling in integrated circuits, Ph
D. dissertation, University California, Berkeley, 1995.
[7] http://smirc.stanford.edu/spiralCalc.html
[8] S.S. Mohan, M. Hershenson, S.P. Boyd and T.H. Lee, Simple Accurate Expressions
for Planar Spiral Inductances, IEEE Journal of Solid-State Circuits, oct.199, pp.
1419-24.
[9] D. Mihalache, G. Ciuprina, D. Ioan, Codestar Benchmark Structures: Comparation
Between Measurements And Simulations, ATEE 2004.
[10] D. Mihalache, CODESTAR-LMN-Software pentru simularea componentelor pasive
din circuite integrate, Sesiunea de comunicari stiintifice ale studentilor 2004.
91
![mapa decese 2020 Layout 1 · 2020. 10. 27. · Cu un sentiment puternic al datoriei ]i-ai slujit familia, armata [i biserica. ~nalt, elegant cu `nf\]i[are maiestoas\ cu ochi alba[tri](https://static.fdocumente.com/doc/165x107/60d86dc9b21f8a0f1525331d/mapa-decese-2020-layout-1-2020-10-27-cu-un-sentiment-puternic-al-datoriei-i-ai.jpg)

![EVENIMENT DE IMPORTAN|+ DE STAT CADOU ...tracer.railway.md/newspaper/ro/2020/paper-ro-2020-07-31...2020/07/31 · sageri transporta\i". Pre[edintele \=rii Igor Dodon a apreciat ]nalt](https://static.fdocumente.com/doc/165x107/60b96dbede3fdb4d2610a572/eveniment-de-importan-de-stat-cadou-20200731-sageri-transportai.jpg)

![Parteneriatul public-privat - ase.md public privat ghid... · de Drept, Universitatea Bucure ... ordine alfabetic=): ... [i societatea civil= \n vederea realiz=rii unor investi] ...](https://static.fdocumente.com/doc/165x107/5a9d22c87f8b9a032a8bc030/parteneriatul-public-privat-asemd-public-privat-ghidde-drept-universitatea.jpg)
![nalt# ]inut# cu unblog.zaibar.ro/fisiere/06-gazeta-de-bailesti-iunie-2017.pdf · 2 Gazeta B~ILE{TIde 1234567890123456789012345678901212345678901234567890123456789012123456789012345678901234567890121234567890123456789012345678901](https://static.fdocumente.com/doc/165x107/5e1bd8a062d3160a0d229bf4/nalt-inut-cu-2-gazeta-biletide-1234567890123456789012345678901212345678901234567890123456789012123456789012345678901234567890121234567890123456789012345678901.jpg)



![S`n`tate & Frumuse]e - informatia-zilei.ro · augustin Buzura, `nalt[ cinstire Pe parcursul mileniului II î. de Chr. şi în primele secole ale mileniului I î. de Hr. în spaţiul](https://static.fdocumente.com/doc/165x107/5e1f1a91e156b0255c3235f9/sntate-frumusee-informatia-zileiro-augustin-buzura-nalt-cinstire.jpg)



![mapa decese 2020 Layout 1Cu un sentiment puternic al datoriei ]i-ai slujit familia, armata [i biserica. ~nalt, elegant cu `nf\]i[are maiestoas\ cu ochi alba[tri ca dou\ diamante, cu](https://static.fdocumente.com/doc/165x107/60d86dc9b21f8a0f1525331e/mapa-decese-2020-layout-1-cu-un-sentiment-puternic-al-datoriei-i-ai-slujit-familia.jpg)


