Metode Inteligente de Conducere a Proceselor
24
PROIECTAREA INTERFEŢELOR OM-MAŞINĂ - referat - 2010
description
Fuzzy - automatica si informatica
Transcript of Metode Inteligente de Conducere a Proceselor

PROIECTAREA INTERFEŢELOR OM-MAŞINĂ
- referat -
2010

CUPRINS
1. Introducere.......................................................................................................................2
2. Conducerea inteligenta a proceselor..............................................................................3
2.1 O scurta privire asupra conducerii inteligente a proceselor................................3
2.2. Cateva tehnici de conducere inteligenta..............................................................6
2.2.1 Controlul Fuzzy............................................................................................6
2.2.2 Controlul neuronal.....................................................................................10
1

1. Introducere
Lotfi Zadeh a considerat necesitatea introducerii algoritmilor fuzzy deoarece a constatat:
cu cât o problemă este mai complexă, cu atât mai greu se poate rezolva algoritmic; şi chiar dacă
se ajunge la un rezultat matematic, acesta din punct de vedere al volumului de calcul nu este
convenabil. Într-unul dintre primele lui articole, L. Zadeh a enunţat principiul incompatibilităţii
dintre precizie şi complexitate, care se manifestă puternic la sistemele umanoide. Acest
principiu era deja cunoscut şi de Albert Einstein: "Atâta timp cât legile matematicii se referă la
realitate, ele nu sunt precise. Iar până când ele sunt precise, nu se mai referă la realitate."
(Geometria und Erfahrung).
În situaţiile în care un sistem sau un proces este foarte complex, sau/şi este afectat de
incertitudini profunde, metodele matematice clasice, exacte, nu mai conduc la soluţii
convenabile. Cu toate că nu se cunosc metode exacte de a soluţiona optimal astfel de probleme
complexe, operatorul uman deseori le rezolvă cu succes folosind algoritmi euristici, imprecişi şi
intuitivi. Chiar şi sistemele şi procesele foarte complexe pot fi rezolvate de operatorul uman
utilizând raţionamentul aproximativ .
Dacă se doreşte a modela „algoritmul” utilizat de conducatorul auto, probabil că cea mai
bună estimare ar fi descrierea cunoştinţelor, informaţiilor înmagazinate în regulile utilizate.
Regulile de bază se formează pe durata de instruire. Colecţia de reguli acumulată se lărgeşte şi se
specifică în mod continuu odată cu creşterea experienţei.
Logica fuzzy este o metodă aproximativă prin care aceste cunoştinte vagi, înmagazinate
într-o bază de reguli, se pot modela formal.
Transpunerea în practică a sistemelor fuzzy se datorează avantajelor ce le prezintă în
urmatoarele situaţii specifice:
permit modelarea sistemelor neliniare, complexe sau imprecis cunoscute,
permit transpunerea experienţei umane în constituirea regulilor de inferenţă, utilizând
variabile lingvistice.
Logica fuzzy este de fapt o tehnică de calcul cu ajutorul căreia în rezolvarea unor
probleme specifice, se pot obţine performante superioare faţă de metodele clasice, exacte.
Sistemele fuzzy totodată au un comportament foarte bun în prezenţa incertitudinii, impreciziei şi
a zgomotului.
Cât de bine lucrează sisteme fuzzy sau reţelele neurale o demonstrează larga răspândire a
acestora în ultimii ani in lumea întreagă. Se cunosc deja o serie de aplicaţii consacrate ale logicii
fuzzy în diferite domenii ale stiinţei: în controlul automat (reglări de temperatură, comanda
vitezei metroului, autofocalizarea camerelor video), în recunoaşterea formelor (algoritmi de
2

clasificare fuzzy), în măsurări (prelucrarea informaţiilor furnizate de senzori), în medicină
(controlul simulatoarelor cardiace), în economie (metode de decizie fuzzy), în psihologie
cognitivă (modelare fuzzy a sistemului de vedere).
2. Conducerea inteligentă a proceselor
2.1. O scurtă privire asupra conducerii inteligente a proceselor
Controlul inteligent în automatizări este radical diferit faţă de metodele clasice de
reglare cu toate că se bazează pe aceleaşi principii: un set de cunoştinţe apriorice despre procesul
vizat şi cerinţele de performanţe impuse sistemului automat. Totuşi, studiile teoretice şi chiar
realizări experimentale sau industriale evidenţiază cu pregnanţă un nou mod de abordare a
problemelor. Diferitele controlere inteligente (neurale, fuzzy, fuzzy-neurale sau combinaţii ale
lor obţinute asistat de algoritmi genetici) pot fi considerate în general aproximatori de funcţii
neliniare. Faţă de estimatorii convenţionali de funcţii se pot enunţa o serie de avantaje:
Procesul de proiectare nu impune cunoaşterea modelului procesului (în multe
aplicaţii este dificil a exprima exact ecuaţii ce descriu dinamica reală a procesului condus, iar pe
de altă parte, chiar dacă se obţine modelul matematic, acesta include totdeauna incertitudini
datorită variaţiilor reale a unor parametrii, perturbaţiilor aleatoare sau neliniarităţilor ce nu pot fi
determinate in timpul fazei de proiectare);
Performanţele de regim tranzitoriu şi robusteţea reglării pot fi îmbunătăţite (aspecte
ce pot fi demonstrate prin compararea experimentală a răspunsurilor aceluiaş sistem, prima dată
condus cu un regulator PID optimal clasic, iar a doua oară cu un controler logic fuzzy);
Proiectarea se poate face exclusiv pe baza unor informaţii lingvistice furnizate de
către experţi sau adunate prin alte tehnici;
În absenţa informaţiilor furnizate de către expert, proiectarea se poate face pe baza
răspunsurilor sistemului obţinute cu seturi de date de intrare experimentale. Evident că pot fi
utilizate şi metode mixte, care conbină informaţiile lingvistice cu cele experimentale;
Structurile obţinute au un nivel de generalitate (dau estimaţii bune atunci când sunt
utilizate noi seturi de date de intrare, altele decât cele folosite în proiectare). În consecinţă se
obţine o interdependenţă faţă de caracteristicile particulare ale elementului de execuţie (în
special motoarele electrice). Algoritmii actuali de control, bazaţi pe tehnici neinteligente,
lucrează pe probleme specifice şi satisfac condiţii de performanţe impuse pentru o clasă redusă a
semnalelor de intrare. Putem spune că fiecare aplicaţie trebuie analizată individual, adică o
problemă specifică se rezolvă cu un algoritm specific. Un exemplu este regulatorul adaptiv clasic
3

care, pe măsură ce acumulează noi informaţii despre dinamica modelului procesului condus, îşi
modifică şi propria lege de conducere.
Structurile pentru controlul inteligent sunt flexibile, putând fi oricând modificate sau
extinse pentru adaptarea la alte situaţii, prin simpla incorporare de noi cunoştinţe, reguli şi date.
Pot fi găsite soluţii de reglare a proceselor ce nu pot fi abordate prin metode
convenţionale.
Controlerele inteligente impun abordări diferite în proiectare, în funcţie de tehnica
folosită. Astfel, la cele bazate pe reţele neurale convenţionale se stabileşte mai întâi o topografie
fixă a reţelei, după care aceasta este instruită pe baza unui algoritm de învăţare, ce urmăreşte în
general minimizarea unui criteriu de cost sau a unei erori. Topologia fixă, apriori stabilită,
impune restricţii reţelei şi poate duce la creşterea nepermis de mare a timpului de calcul în
procesul de învăţare. De aceea, sunt căutate reţele cu topologie adaptivă şi algoritmi euristici
neconvenţionali pentru accelerarea instruirii. Dacă se utilizează controlere fuzzy convenţionale,
se stabileşte mai întâi valorile iniţiale ale regulilor şi funcţiilor de apartenenţă. Aceasta este o
procedură dificilă şi chiar inacceptabilă atunci când nu sunt disponibile apriori aceste informaţii
expert despre sistem. Totuşi se întrevăd, şi aici soluţii, prin utilizarea unor regulatoare adaptive
hibride, de tip fuzzy – neural.
Soluţiile bazate pe inteligenţa artificială (AAI) sunt două: controlul indirect şi cel direct.
În primul caz, se utilizează un modul pentru identificarea on-line a modelului procesului condus,
model ce este utilizat pentru proiectarea controlerului. Intrările şi ieşirile sistemului trebuie să fie
disponibile la fiecare pas de eşantionare.
Adaptarea directă, procesul reprezentat printr-o tabelă de performanţă care este utilizată
pentru determinarea răspunsului curent utilizând anumite calităţi – cum ar fi eroarea sau
modificarea erorii între două momente consecutive de eşantionare. Când se utilizează un
controler fuzzy, cea mai simplă posibilitate de adaptare este cea a factorului de scalare, care
schimbă clasificarea variabilelor de intrare, sau prin modificarea formei funcţiilor de apartenenţă.
Această soluţie se poate implementa în acţionările neadaptive, existente în industrie. O
soluţie adaptivă poate fi modificarea bazei de reguli, la fiecare pas de eşantionare estimându-se
nivelul de performanţe obţinut cu vechile reguli şi ajustându-le pe acestea corespunzator.
Adaptarea asistată de algoritmi genetici pentru controlere fuzzy sau neurale oferă o
tehnică de proiectare a acestora sistematică şi simplu de implementat. Se obţin soluţii robuste,
configurări topologice, minimale, autoînvăţare rapidă şi convergenţă imediată.
În realizarea unui sistem de conducere inteligent trebuie urmărit un ciclu de dezvoltare
conform schemei din Figura 1.
4

Figura 1. Ciclu de dezvoltare.
Primul pas al ciclului îl reprezintă analiza problemei şi conţine două etape distincte:
Identificarea şi descompunerea în subprobleme. O problemă complexă, cum ar fi de
exemplu fabricaţia unor produse pe o linie de asamblare, se poate descompune în subprobleme:
aproximarea cu semifabricate, asamblarea propriu-zisă, controlul de calitate şi depozitarea
pieselor finite. Evident că problemele simple se rezolvă ca atare.
Identificarea proprietaţilor problemei. Dacă am făcut o descompunere, identificarea se
face pe subprobleme şi trebuie să evidenţieze nevoile de achiziţie automată de cunoştinţe,
accesibilitatea fizică a acestora, condiţiile de lucru (şi gradul de modificare al acestora, pentru
evitarea cerinţelor de robusteţe), cerinţe pentru explicarea deciziilor, etc.
Următorul pas urmăreşte alegerea tehnicilor de lucru adecvate pentru fiecare
subproblemă, în funcţie de proprietăţile identificate. Se ţine seama atât de capabilitatea fiecărei
tehnici în rezolvarea problemei cât şi de disponibilităţile de calcul de care se dispune şi de
compatibilitatea între tehnici diferite. Pe această bază se stabileşte concret, în pasul trei, tehnica
ce va fi utilizată. În anumite situaţii soluţia optimă este alegerea unei metode hibride.
Implementarea sistemului de control inteligent implică alegerea mediului de programare
potrivit şi stabilirea celorlalte cerinţe necesare realizării practice.
Programarea Orientată pe Obiecte (POO) reprezintă modelul natural pentru
implementare. În această abordare, seturi de obiecte interactionează între ele prin comutarea unor
5
Analiza problemeiidentificarea subproblemeloridentificarea proprietăţii
Adecvanţa mijloacelor de lucruce tehnici rezolvă cel mai bine subproblema
Selecţia tehnicilor inteligente
Implementarecăutarea celei mai bune metode de implementare
Validarerezultatele sunt corecte?
Mentenanţamonitorizarea sistemuluiîntreţinerea cunoştinţelorreinstruire
Corecţii
Reproiectare
Reproiectare

mesaje. Acestea nu conţin numai date, ci şi operaţii ce vor fi executate de obiectele receptoare.
Reacţiile obiectelor la un mesaj sunt diferite, în funcţie de procedurile care au fost incapsulate în
ele. Deoarece obiectele au interfeţe de comunicaţie similare, manevrarea lor se face la fel.
Utilizarea POO pentru reprezentarea diferitelor tehnici inteligente impune câteva stiluri
de prelucrare. Totuşi, pentru asigurarea compatibilităţii comunicării şi schimburilor de informaţii
cu alte sisteme de control, se impune adoptarea unui protocol pentru schimburi de date. Cele
mai larg acceptate astfel de protocoale în aplicaţii industriale sunt DDE (Dynamic Data
Exchange) şi OLE (Object Linckingand Embedding). DDE oferă un mecanism de transport de
nivel scăzut, pentru informaţii de tip fine grain (mici bucăţi de date), pe când OLE este un
protocol de nivel înalt, pentru informaţii de tip cose grain (de fapt, obiecte) transportate între
diferitele aplicaţii.
Faza de validare este utilizată pentru testarea şi verificarea funcţionării componentelor
individuale ale aplicaţiei. Dacă sunt descoperite anomalii de funcţionare, atunci se iau măsuri de
corecţie sau, în cazuri mai grave, de reproiectare.
Sarcinile fazei de mentenanţă constau în evaluarea periodică a performanţelor sistemului
şi efectuarea unor ajustări sau îmbunătăţiri. Etapa este importantă pentru componentele adaptive
(reţele neurale, algoritmi genetici) care îşi pot degrada performanţele la schimbarea parametrilor
mediului de lucru, dacă nu sunt reinstruite cu date noi.
2.2. Câteva tehnici de conducere inteligentă
2.2.1 Controlul Fuzzy
Numeroase procese industriale nu se pot conduce convenabil prin procedee clasice
datorita dificultatilor de modelare, neliniaritatilor puternice sau lipsei datelor cantitative
referitoare la intrari si iesiri. Astfel de procese pot fi insa conduse facil de catre operatori umani,
pe baza unor reguli de operare cu un profund caracter euristic si intuitiv. Operatorii lucreaza in
conditii de imprecizie si au la dispozitie informatii cantitative despre proces. Teoria controlului
fuzzy se ocupa de acest aspect uman al procesului de reglare.
Alternativa din ce in ce mai utilizata in supravegherea si conducerea unor procese
complexe o reprezinta sistemele de decizie bazate pe reguli. In aceste cazuri, teoria fuzzy
reprezinta o metoda de formalizare analitica foarte puternica, oferind posibilitatea combinarii
elegante a calculuilui numeric cu cel simbolic.
Regulatoarele fuzzy, sau regulatoarele lingvistice, se pot diferentia in trei clase:
Regulator Mamdani, care reprezinta tipul uzual;
Regulator Sugeno;
6

Regulatoare probabilistice
Controlerul fuzzy elementar
Un controler fuzzy elementar se compune din urmatoarele module:
Intrare (I)
Numere fuzzy (NF)
Iesire (E)
Reguli (R)
Interfata sau evaluare (IF)
Defuzificarea (DF)
Controler fuzzy elementar
Modulul Intrare implementeaza urmatoarele functii:
Achizitia iesirii y a procesului
Calculul erorii de urmarire si a derivatelor acesteia de ordin 1, 2, …, k, cerute de
algoritmul de reglare
Scalarea marimilor ei calculate mai sus, astfel incat, la fiecare pas de esantionare sa
rezulte Ei = Ki * ei apartinand intervalului [-1,1]. In general se utilizeaza erorea scalata E1 si
derivata acesteia , E2.
Modulul Numere Fuzzy ofera N numere fuzzy R(j). acestea sunt submultimi fuzzy ale
dreptei reale cu functii de apartenenta egal departate de [-1,1]. Aceste numere definesc
variabilele lingvistice care apar in antecedentele regulilor de control fuzzy. Spre exemplu, pentru
N = 3, numerele fuzzy se pot interpreta ca R(1) = negativa, R(2) = zero, R(3) = pozitiva. De
obicei R(1) este centrata in –1, R(2) in 0 si R(3) in 1, iar definirea este facuta printr-o functie de
apartenenta de forma trapezoidala, triunghiulara sau gaussiana.
7
I E IF DF
NF R

Modulul Iesire furnizeaza iesirea primara a regulatorului, care este o multime fuzzy 0,
ale carei elemente sunt numerle fuzzy 0(I):
0 = { D(1)/0(1), …, D(L)/0(L)}
unde D(I) este valoarea de apartenenta a lui 0(I) la 0.
Numerle fuzzy 0(I) definesc variabilele lingvistice folosite in parte de consecinte a
regulilor de control fuzzy.
Modulul Reguli este o tabela a regulatorului careia i se asociaza o functie de concluzie
P. Regulile de control fuzzy sunt complet specificate prin functia de concluzie P.
Modulul Interfata realizeaza evaluarea reguliilor de control fuzzy. Se utilizeaza doua
metode de baza, ponderile de tip sistem expert si procedurile bazate pe rationament aproximativ
(logica fuzzy). A doua procedura de evaluare este folosita de majoritatea regulatoarelor fuzzy
elementare. Ideea ei de baza este de a interpreta o regula de control fuzzy ca o implicatie. Ideea
ei de baza este de a interpreta o regula de control fuzzy ca o implicatie in rationamentul
aproximativ si de a folosi regula compozitionala a lui Zadek pentru a evalua inferenta, dandu-se
intrarile r1 si r2.
Modulul Defuzificare are ca functie generala comenzi catre proces pe baza concluziilor
date de modelul interferenta. Iesirile acestuia constauintr-o multime fuzzy de forma:
0 = { u(1)/0(1), …, u(I)/0(I)}
unde u(I) gradul de apartenenta si 0(I) variabile lingvistice utilizate ca o consecinta a regulilor de
reglare.
Defuzificarea reprezinta transformarea unei multimi fuzzy in increment al comenzii Du,
astfel incat comanda va fi :
u(t) = u (t-1) + kuxDu
Algoritmii pentru defuzificare utilizabili sunt de mai multe tipuri.
Defuzificarea ES sau media fuzzy – fuzzy mean – elaboreaza incremente ale comenzii de
forma:
u = cv(i)u(i) pentru cazul liniar sau:
u = cv(i)u(i)/ u(i) pentru cazul neliniar, unde cv(I) reprezinta valoarea centrala a
variabilei fuzzy, iar u(I) gradul de apartenenta.
Defuzificarea prin rationament fuzzy se face fie calculand media maximului, adica media
tuturor valorilor al caror grad de apartenenta este maxim, fie calculand centrul de greutate al
multimii fuzzy de iesire, aceasta metoda fiind ideala din punct de vedere al robustetei
algoritmului de reglare, avand insa dezavantajul major al timpului crescut de calcul.
Controlerul Mamdani
8

Vom prezenta acest controler printr-un exemplu, pentru a oferi un suport mai bun a
conceptelor. Regulatorul opereaza la intrare cu eroare si variatia acesteia., iar la iesire elaboreaza
incremente ale comenzii. Pentru cele trei marimi considerate vom alege cate cinci numere fuzzy
de descriere: pozitiv mare (PB), pozitiv mediu (PM), pozitiv mic (PS), zero (ZE), negativ mic
(NS), negativ mediu (NM), negativ mare (NB). Cele cinci numere sunt descrise prin functii de
apartenenta care satisfac urmatoarele cerinte:
Sunt convexe
Nu se suprapun simultan mai mult de doua
Suma lor este 1 in punctele de suprapunere.
In exemplu se considera 10 intervale de cuantificarepentru fiecare domeniu de variatiea
celor trei marimi (cuprinse intre –5 si 5). Forma functiilor de apartenenta este triunghiulara sau
trapzoidala ca in figura urmatoare.
Regulile utilizate sunt de forma
DACA eroare = v1 S1 variatia erorii = v2 ATUNCI iesire = v3
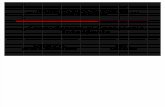
Ele sunt sintetizate in urmatorul tabel de decizie:
Der
er
NB NM NS ZE PS PM PB
NB NB NB NB NB NM NS ZE
NM NB NB NB NM NS ZE PS
NS NB NB NM NS ZE PS PM
ZE NB NM NS ZE PS PM PB
PS NM NS ZE PS PM PB PB
PM NS ZE PS PM PB PB PB
PB PS PS PM PB PB PB PB
In tabela, er = eroare = referinta – iesire, Der = variatia erorii = er (k) – er (k-1)
9
1
0.5
0
NB MN NS ZE PSPM PB

Din multimea tuturor regulilor posibile 7 x 7 x 7 s-au considerat cele de mai sus, pe baza
univocitatii (la o pereche de intrari sa avem aceleasi iesire) si a condiilor de negativitate a
reactiei inverse. Regulile nu sunt optimale.
Ca regula de defuzificare s-a ales metoda espert, care este rapida si robusta. Astfel daca
er = -3.5, iar Der = 0.25, avem:
Variatia erorii = {0.75/ZE, 0.25/PS} si
Eroare = {0.5/NM, 0.5/NB}
Deci regulile care vor fi aplicate sunt:
DACA er = NM SI Der = ZE ATUNCI cda = NM
DACA er = NB SI Der = ZE ATUNCI cda = NB
DACA er = NM SI Der = PS ATUNCI cda = NS
DACA er = NB SI Der = PS ATUNCI cda = NM
Prin evaluare, comanda va avea un grad de apartenenta:
cda = {0.5/NM, 0.5/NB, 0.25/NS, 0.25/NM}
Se remarca faptul ca la doua reguli diferite avem aceiasi concluzie. In acest caz se
considera maximul din cele doua grade de apartenenta si este luat in calcul la defuzificare.
2.2.2 Controlul neuronal
O retea neuronala (NN) poate modela sisteme neliniare dinamice. Este posibil ca aceste
modele neliniare sa fie incorporate in structuri de reglare. In acest cotext, NN sunt primite ca un
cadreu de reprezentare a cunostintelor care stocheaza dinamica procesului si caracteristicile
modelului acestuia. Asa cum functiile de transfer permit o reprezentare generica pentru modele
liniare, retelele neuronale au potential de reprezentare a sistemelor neliniare “cutie neagra”.
Abilitatea retelei de a putea aproxima raspunsuri neliniare este esentiala in aceasta actiune
Structuri de control utilizand NN
Modelele directe si inverse ale sistemelor dinamice pot fi utilizate imediat pentru reglare.
Au fost propuse un mare numar de structuri de control bazate pe NN. Mai intai vom prezenta
doua metode de reglare directa: reglarea prin supervizare si reglarea cu modul invers.
Reglarea prin supervizare se bazeaza pe realitatea ca in numeroase situatii omul
executa actiuni de control in situatii particulare unde este dificil a proiecta un regulator automat
utilizand tehnicile standard, mai ales datorita imposibilitatii de a obtine un model analitic al
sistemelor reglate. Ar fi astfel de dorit sa se proiecteze un regulator automat care sa imite
actiunile omului, adica sa efectueze reglarea prin supraveghere. Retelele neuronale furnizeaza o
solutie alternativa. La sistemele expert pentru implementarea unor astfel de tehnici. Instruirea
retelei este similara in principiu cu invatarea unui model direct.
10

In acest caz totusi, intrarile retelei corespund informatiilor senzorilor de intrare primite de
operatorul uman, iar iesirile dorite utilizate pentru instruire corespund comenzilor umane de
control aplicate sistemului. In acest fel au fost solutionate probleme diverse ca, de exemplu,
controlul caruciorului cu pendul (pole-cart problem) .
Reglarea cu model invers utilizeaza, evident, un model invers al procesului cuplat in
cascada cu sistemul condu, astfel incat ansamblul rezultat da o traiectorie identica intre raspunsul
dorit adica referinta retelei si sistemul reglat. Aici reteaua este inclusa direct in regulator. Metoda
este frecvent utilizata in aplicatiile cu roboti. Datorita problemelor de robustete ce pot aparea in
functie de precizia modelului invers utilizat in regulator si datorita absentei reactiei negative, se
recomanda utilizarea instruirii on – line, in care parametrii modelului invers sunt ajustati in
permanenta.
In ultimul timp au fost propuse si tehici de reglare mai sofisticate, utilizand NN, cum ar fi
controlul cu model de referinta, cu model intern sau control predictiv.
Reglarea cu model de referinta consta in specificarea performantelor sistemului in
bucla inchisa printr-un model de referinta M, care este definit prin perechile de intrare – iesire
{r(t), yr(t)}. Sistemul de reglare auromata va impune iesirii procesului yp(t) o evolutie
asimptotica catre yr, adica:
O structura de reglare pentru un sistem neliniar utilizand un model intern conectionist
este prezentata in figura urmatoare:
11
lim||yr(t) – yp(t)|| , cu, 0
t
Model M1
er
Model M
Retea Neuronala
Procesu
d
yp

In aceasta structura eroarea definita mai sus este utilizata pentru invatarea retelei care
reprezinta microcontrolerul. Metoda este evident legata de invatarea unui model invers M1 al
procesului, iar procedura de instruire a controlerului urmareste sa-l forteze sa anuleze
amplificarea inversului, in sensul definit de modelul de referinta.
Reglarea cu model intern (Internal Model Control – IMC ) acumuleaza rolul sistemului
si al modelului invers, care sunt utilizate direct ca elemente in interiorul buclei de reactie. IMC a
fost suficient studiat si au fost demonstrate proprietatile sale de stabilitate si robustete.
Ca in Figura , un model al sistemului este plasat in paralel cu sistemul real. Diferenta
intre cele doua iesiri este utilizata cu semnal de reactie.
Acest semnal este prelucrat de un subsistem de reglare F1 de pe calea directa.
Proprietatile IMC dicteaza daca aceasta parte a controlerului poate fi legata de inversul
sistemului. Date modelele retelei pentru sistemul direct si dinamica inversa, realizarea
controlului IMC e simpla. Modelul direct M si al controlerului C (model invers) utilizeaza retele
neurale din figura. Subsistemul F este utilizat ca un filtru, proiectat de asa maniera incat sa
introduca o anumita robustete si sa transforme raspunsul sistemului in bucla inchisa.
Implementarile cu IMC sunt limitate numai pentru sisteme stabile in bucla deschisa,
acolo unde teoria este bine pusa la punct. Aceasta releva un numar de proprietati agreabile, prin
care:
Presupunand ca procesul si regulatorul sunt stabile intrare – iesire si ca modelul M este
reprezentarea perfecta a procesului, atunci sistemul in bucla inchisa este stabil intrare – iesire.
12
F C proces
Model M
yb +
-
+
-
ym
yp de r u

Presupunand ca inversul operatorului modelului procesului exista si ca acest invers
este utilizat ca regulator (astfel incat sistemul in bucla inchisa este stabil intrare – iesire cu acest
controler), atunci reglarea va fi perfecta, adica yp = ys.
Presupunand ca inversul unui model de stare exista, ca operatorul controlerului de
stare este egal cu acesta si ca sistemul bucla inchisa cu acest controler este stabil intrare – iesire,
atunci regimul tranzitoriu constant este atins pentru intrari asimptotice constante.
Structura IC permite o metoda directa pentru proiectarea regulatoarelor neliniare cu
reactie. Conform proprietatilor de mai sus, daca un bun model al procesului este ales, sistemul in
bucla inchisa va urmari exact referinta, in ciuda perturbatiilor nemasurabile ce actioneaza asupra
procesului real. In practica, un model ideal nu poate fi obtinut niciodata. Filtrul F contribuie la o
apropiere de acest caz ideal, aducand robustete sistemului cu IMC.
Reglarea predictiva presupune efectuarea urmatorilor pasi:
Predictia iesirii sistemului pentru un anumit orizont viitor de timp
Presupunand ca iesirile viitoare dorite sunt cunoscute, se alege un set de comenzi
viitoare, u, care sa minimizeze eroare viitoare intre iesirile predictate si cele dorite.
Utilizand primul set U de intrare, se repeta intreaga procedura pentru urmatorul
moment de esantionare.
Se poate demonstra ca metoda poate stabiliza sisteme liniare, cat si neliniare. Pentru
atingerea obiectivului de a elabora o comanda astfel incat eroarea asupra orizontului viitor sa fie
minima, functia de cost are forma urmatoare:
unde:
yr – este iesirea modelului de referinta (iesirea dorita)
ym – este iesirea modelului procesului.
Primul termen al functiei cost este o masura a distantei intre predictia modelului si
traiectoria viitoare dorita. Al doilea termen penalizeaza variatiile excesive ale variabilei
modificate.
O structura de control conectionist predictiv este aratata in figura :
13
J N1,N2,N3 = (yr(k)-ym(k))2 + k(U(k))2 , i+N2 i+Nu
k=1 k=1

14