Mecanisme Pentru Roboti Care Se Deplaseaza Prin Salt
9
MECANI SME PENTRU ROBO I CARE SE DEPLASEAZ PRIN Ţ Ă SALT OB INUTE PRI N STUDII PE SUBI EC I VI I Ţ Ţ 1. INTRODUCERE A a cum se tie, pr in ş ş biologie se în el ege ti in a vie ii (gr . ţ ş ţ ţ bios - via , ţă logos - tiin ) . ş ţă Stabilirea i elucidarea unor analogii între sistemele tehnice i cele biologice a fost i ş ş ş r mâne o ă inepu izabil surs de i nsp ir a ie în st imul area i de zvoltarea cr eat iv it ii te hni ce. ă ă ţ ş ăţ Una din cele m ai ti nere tiin e care s-au delimitat în ul timele decenii, este ş ţ bionica. No iunea a fost introdus de ameri canul J.E .Steel e în 1960 (provine d in cupl area ţ ă no iun ilo r de bio log ie i el ect ronic ), pe ntru a desem na ce rcet ril e de cib erne tic ţ ş ă ă ă orientate în special spre studi ul simu l rii mecanice a unor func ii caract eristic e organism elor. ă ţ Bionica a fost def ini t ca tii na care stu dia z fun c iile orga nis mel or vii i simula rea prin ă ş ţ ă ţ ş mijlo ace teh nice a acestor func ii. Printre obiecti vele ce rcet rii bio nice act uale, o aten ie ţ ă ţ specială es te acordat : ă - studiului s istemu lui ne rvos conc eput ca re ea hipe rcomple x de senz ori; ţ ă - studiului organelor senzoriale; - studiului organelor efectoare. Studiu l organe lor efect oare i al procesel or de transmitere a come nzilor c tre organ ele ş ă efe ctoar e rep rez int o pa rte esen ial a bionicii. ă ţ ă Solu iile existente în natura vie în acest domeniu sunt extrem de diverse i ingenioase. ţ ş Studiul i imita rea l or es te d e o i nest ima bil uti li tat e în circ ums tan e nen um rate . Ca ş ă ţ ă exemple tipice pot fi citate cel e ale construc iei manipulatoarelor automate i ale ţ ş pedipulatoarelor automate. A a cum se tie, ş ş mecanismul este un sistem mecanic în care corpurile materiale rezi stente c omp onente, înt re ca re exi st leg tur i mobile , î i po t sch imb a sub ac iune a ă ă ş ţ fo r el or ţ pozi ia relativ , în mod determi nat, pentru îndepl inirea unor fu nc ii necesare ţ ă ţ (transmiterea puterii meca nic e, a for elo r, a mi c ril or, g hid area corp uril or et c.). ţ ş ă Biomecanismul este acel sistem mecanic întâlnit în organismele vii, care are caracteristici
-
Upload
gabriela-jurcan -
Category
Documents
-
view
22 -
download
0
Transcript of Mecanisme Pentru Roboti Care Se Deplaseaza Prin Salt
5/14/2018 Mecanisme Pentru Roboti Care Se Deplaseaza Prin Salt - slidepdf.com
http://slidepdf.com/reader/full/mecanisme-pentru-roboti-care-se-deplaseaza-prin-salt
MECANISME PENTRU ROBO I CARE SE DEPLASEAZ PRINŢ Ă
SALT
OB INUTE PRIN STUDII PE SUBIEC I VIIŢ Ţ
1. INTRODUCERE
A a cum se tie, prinş ş biologie se în elege tiin a vie ii (gr.ţ ş ţ ţ bios - via ,ţă logos - tiin ) .ş ţă
Stabilirea i elucidarea unor analogii între sistemele tehnice i cele biologice a fost iş ş ş r mâne oă
inepuizabil surs de inspira ie în stimularea i dezvoltarea creativit ii tehnice.ă ă ţ ş ăţ
Una din cele mai tinere tiin e care s-au delimitat în ultimele decenii, esteş ţ bionica.
No iunea a fost introdus de americanul J.E.Steele în 1960 (provine din cuplareaţ ă
no iunilor de biologie i electronic ), pentru a desemna cercet rile de ciberneticţ ş ă ă ă orientate înspecial spre studiul simul rii mecanice a unor func ii caracteristice organismelor.ă ţ
Bionica a fost definit ca tiin a care studiaz func iile organismelor vii i simularea prină ş ţ ă ţ ş
mijloace tehnice a acestor func ii. Printre obiectivele cercet rii bionice actuale, o aten ieţ ă ţ specială
este acordat :ă
- studiului sistemului nervos conceput ca re ea hipercomplex de senzori;ţ ă
- studiului organelor senzoriale;
- studiului organelor efectoare.Studiul organelor efectoare i al proceselor de transmitere a comenzilor c tre organeleş ă
efectoare reprezint o parte esen ial a bionicii.ă ţ ă
Solu iile existente în natura vie în acest domeniu sunt extrem de diverse i ingenioase.ţ ş
Studiul i imitarea lor este de o inestimabil utilitate în circumstan e nenum rate. Caş ă ţ ă
exemple tipice pot fi citate cele ale construc iei manipulatoarelor automate i aleţ ş pedipulatoarelorautomate.
A a cum se tie,ş ş mecanismul este un sistem mecanic în care corpurile materiale
rezistente componente, între care exist leg turi mobile, î i pot schimba sub ac iuneaă ă ş ţ for elorţ
pozi ia relativ , în mod determinat, pentru îndeplinirea unor func ii necesareţ ă ţ (transmiterea puteriimecanice, a for elor, a mi c rilor, ghidarea corpurilor etc.).ţ ş ă
Biomecanismul este acel sistem mecanic întâlnit în organismele vii, care are
caracteristici
5/14/2018 Mecanisme Pentru Roboti Care Se Deplaseaza Prin Salt - slidepdf.com
http://slidepdf.com/reader/full/mecanisme-pentru-roboti-care-se-deplaseaza-prin-salt
comune cu mecanismul definit anterior.
Mecanismul bionic reprezint acele mecanisme care modeleaz structura i func iileă ă ş ţ
biomecanismelor. Acesta se mai poate defini ca fiind mecanism echivalent
biomecanismului 9 .ă ş
Biomecanismul este mecanismul existent în biosisteme.Mecanismul bionic este mecanismul care modeleaz structura i func iileă ş ţ
biomecanismului.Devin astfel, interesante, biomecanismele care realizeaz performan e deosebite. Întreă ţ
acestea, biomecanismele care realizeaz locomo ia prin salt se caracterizeaz prin:ă ţ ă
- deplasarea rapid ;ă
- consum energetic minim;- echilibrare dinamic ;ă
- prezint componente care realizeaz recul elastic.ă ă
Locomo ia prin salt a început s fie studiat relativ recent.ţ ă ă P rintele deplas rii prin salt, ă ăM. H. Raibert, a înfiin atţ MIT Leg Laboratory în 1980 pe care l-a condus pân în 1995.ă
În 1980Marc Raibert era cadru diadctic asociat i preda metode computa ionale la Institutul deş ţ Robotic ,ă
dup care a devenit profesor de inginerie electric i de tiin e informa ionale devenindă ă ş ş ţ ţ membru
al Artificial Intelligence Laboratory. În 1995 Raibert a devenit pre edintele companieiş
private
Boston Dynamics Inc.În
perioada
1980-2000 MIT Leg Laboratory a proiectat i a realizat aproximativ 20 deş
robo i, majoritatea ob inu i pe baza studiilor realizate pe subiec i din regnul animalţ ţ ţ ţ (dinozaur,
flamingo, curcan, capr , cal, cangur etc.)ă [10].
2. ANALIZA MI C RII DE SALT A BROA TEI-DE-LACŞ Ă ŞPentru identificarea func iilor cinematice ale biomecanismului aferent locomo iei prinţ ţ
saltla broasc a fost necesar filmarea în condi ii de laborator a subiectului viu. S-au folosită ă ţ
două
exemplare de broasc -de-lac mareă (Rana ridibunda ridibunda) dintre care unul de masă
10,7 g,iar cel lalt de mas 25 g.ă ă
Filmarea s-a realizat în dou etape:ă

5/14/2018 Mecanisme Pentru Roboti Care Se Deplaseaza Prin Salt - slidepdf.com
http://slidepdf.com/reader/full/mecanisme-pentru-roboti-care-se-deplaseaza-prin-salt
1. În condi ii de studio cu douţ ă camere mobile de tipul PANASONIC M40 i SONY 8ş
mm.
2. În condi ii de studio cu douţ ă camere fixe de tipul JVC cu 20 cadre/sec.
Subiec ii au fost introdu i într-o cutie de sticl la care s-au ata at repere fixe trasate peţ ş ă ş
hârtiemilimetric pe dou fe e ale acesteia. S-au realizat film ri paralel cu planul YOZ, XOY iă ă ţ ă ş XOZcare au pus în eviden parametrii cinematici necesari pentru identificarea mi c riiţă ş ă spa iale.ţ
S-au utilizat mai multe scheme principale de filmare utilizând în principal două camere
de luat vederi. O astfel de schem de filmare este prezentat în fig.1.ă ă
Fig.1. Schema de filmare la care o camer a fost amplasat perpendicular pe planul YOZ,ă ă iar
cealalt perpendicular pe planul XOY.ă
Film rile s-au realizat cuă camere fixe fixate pe trepied sau cu camere mobile cu operator
uman, analiza mi c rii studiindu-se fa de reperul fix XYZ sau fa de un alt reper fixş ă ţă ţă
paralel cuacesta. Filmarea s-a realizat în timp real cu 20 de cadre pe secund , f r contorizareaă ă ă
timpului pevideocamer , baza de timp luându-se în considerare pe filmele digitale ob inute.ă ţ
Utilizând unvideocasetofon PANASONIC NV-P2U (videoplayer cu înregistrare) i un calculator cuş
procesorPentium II dotat cu o plac de captură ă video 3DEMON iar cu programul Adobe Premiere
4.2. s-a
transformat semnalul video în fi iere TIFF Bitmap (20 de fi iere pentru fiecare secundş ş ă
de film)

5/14/2018 Mecanisme Pentru Roboti Care Se Deplaseaza Prin Salt - slidepdf.com
http://slidepdf.com/reader/full/mecanisme-pentru-roboti-care-se-deplaseaza-prin-salt
la rezolu ia 320x420 dpi. Programul Adobe Premiere 4.2. este un program de captur deţ ă imagine
care pe lâng posibilitatea transform rii semnaluluiă ă video în film digital permite
selectarea
secven elor i montarea acestora, având toate instrumentele necesare unui laborator deţ ş montaj.
Pentru filmele realizate (care s-au ob inut cuţ camere care filmeaz cu 20 de cadre peă
secund )ă
s-au ob inut secven e TIFF pentru fragmentele selectate care cuprind salturile interesante.ţ ţ Trebuieremarcat faptul c , din materialul vast filmat numai o parte foarte mic devine materială ă realpentru analiza saltului, deoarece:
- condi iilor de studio sunt complet diferite de ecosistemul animalelor studiate;ţ- exist timpi de preg tire i de a teptare;ă ă ş ş
- subiec ii obosesc relativ repede (dup 4-5 salturi);ţ ă
- subiec ii analiza i sunt activi noaptea i mai pu in în timpul zilei;ţ ţ ş ţ
- deseori, subiec ii lovesc pere ii în timpul saltului datorit reflexiei de oglind a sticleiţ ţ ă ă
(animalul consider c este prezent un alt exemplar în apropiere).ă ă
Materialul selectat i transformat în imagini TIFF este supus opera iei de contorizare prinş ţ introducerea bazei de timp; prin filmare cu 20 de cadre pe secund se poate considera că ă se ob ineţ
o imagine la fiecare 0,05 secunde. De asemenea, se traseaz sistemul global fix la care seă varaporta mi carea de salt. În figura 7 se prezint o imagine cu contorul de timp i sistemulş ă ş
fix deaxe.
Se constat c se pot ob ine solu ii relativ precise pentru pozi iile punctelor caracteristiceă ă ţ ţ ţ
biomecanismului broa tei-de-lac, chiar dac se face analiza unor imagini laterale (prinş ă
filmareaplanului XOZ) utilizând aceste unelte auxiliare suprapuse peste imaginea brut ob inută ţ ă
prin prelucrarea cu Adobe Premiere, urmat de prelucrarea cu CorelDraw. Astfel, seă
poate extragecoordonata Y pentru punctele aflate în centrul articula iilor prin trasarea auxiliar aţ ă proiectantelorpe planul XOY.Pentru sistematizarea datelor s-a considerat c este necesar schematizarea structuriiă ă

5/14/2018 Mecanisme Pentru Roboti Care Se Deplaseaza Prin Salt - slidepdf.com
http://slidepdf.com/reader/full/mecanisme-pentru-roboti-care-se-deplaseaza-prin-salt
biomecanice a subiectului studiat, precum i notarea articula iilor principale careş ţ particip laă
locomo ia prin salt. Astfel, s-a ob inut schema din figura 2 care s-a creat printr-o serie deţ ţ
simplific ri evidente.ă
Fig.2. O schem a biomecanismului broa tei-de-lac creat pentru sistematizarea datelor.ă ş ă
Pentru determinarea pozi iilor punctelor caracteristice ale biomecanismului s-a analizat oţ
secven de film format din nou imagini prezentate în figura 3.ţă ă ă
Fig.3. Nou imagini ale unui ciclu de salt.ă
Cu instrumentele expuse anterior i prin citirea direct a coordonatelor pe imagini s-auş ă
ob inut rezultate de tipul celor prezentate în tabelul 1:ţ
Tabelul 1-Datele m surate ale punctului Aă
Curbele pe care se deplaseaz punctele caracteristice ale biomecanismului pot fiă
5/14/2018 Mecanisme Pentru Roboti Care Se Deplaseaza Prin Salt - slidepdf.com
http://slidepdf.com/reader/full/mecanisme-pentru-roboti-care-se-deplaseaza-prin-salt
vizualizate prin intermediul func ieiţ 3DPOLY din programul AUTOCAD. În acela iş
program se
poate ob ine o interpolare grafic deţ ă tip spline-spa ial ţ utilizând comanda PEDIT . În
figura 4 se
prezint varia ia ob inut prin înc rcarea direct a datelor (cu albastru) i curba realizată ţ ţ ă ă ă ş ă prininterpolare spline (ro u) 6 .ş ă ş
Fig.4. Varia ia punctului A în func ie de timp.ţ ţ
Pe baza datelor m surate s-a încercat interpolarea rezultatelor cu func ii polinomiale deă ţ
gradul 8 de tipul:
F(t)=a tPentru aceasta s-a utilizat programul Mathematica 2.2
În acest program s-a format un sistem de 9 ecua ii cu 9 necunoscute pe baza datelorţ
prezentate în tabelele 1-15 care este rezolvat cu func iaţ NAlgebraicRules
Dup rezolvare se ob ine urm toarea func ie de gradul 8 pentru coordonata x a punctuluiă ţ ă ţA:
2 6 3 7 4
XA(t) = 70 + 5599.13 t - 286390. t + 5.62982 10 t - 5.61025 10 t +
8 5 8 6 9 7 8 8
3.0924 10 t - 9.50151 10 t + 1.52044 10 t - 9.86178 10 t
Pentru
ob inerea graficului func iei x(t) pentru punctul A se aplic func iaţ ţ ă ţ Plot . În figura
5 este prezentat varia ia coordonatei X în func ie de timp pentru punctul A.ă ţ ţ
5/14/2018 Mecanisme Pentru Roboti Care Se Deplaseaza Prin Salt - slidepdf.com
http://slidepdf.com/reader/full/mecanisme-pentru-roboti-care-se-deplaseaza-prin-salt
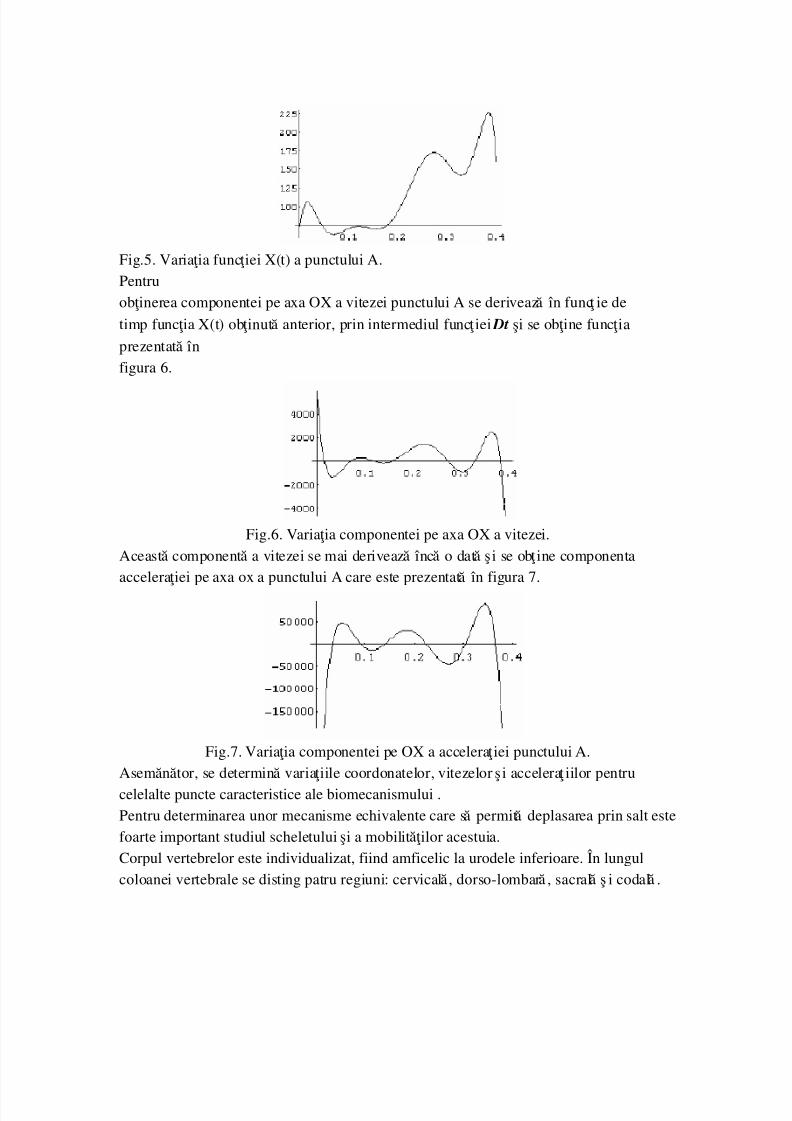
Fig.5. Varia ia func iei X(t) a punctului A.ţ ţ
Pentruob inerea componentei pe axa OX a vitezei punctului A se deriveaz în func ie deţ ă ţ
timp func ia X(t) ob inut anterior, prin intermediul func ieiţ ţ ă ţ Dt i se ob ine func iaş ţ ţ
prezentat înă
figura 6.
Fig.6. Varia ia componentei pe axa OX a vitezei.ţ
Aceast component a vitezei se mai deriveaz înc o dat i se ob ine componentaă ă ă ă ă ş ţ
accelera iei pe axa ox a punctului A care este prezentat în figura 7.ţ ă
Fig.7. Varia ia componentei pe OX a accelera iei punctului A.ţ ţ
Asem n tor, se determin varia iile coordonatelor, vitezelor i accelera iilor pentruă ă ă ţ ş ţ
celelalte puncte caracteristice ale biomecanismului .Pentru determinarea unor mecanisme echivalente care s permit deplasarea prin salt esteă ă foarte important studiul scheletului i a mobilit ilor acestuia.ş ăţ
Corpul vertebrelor este individualizat, fiind amficelic la urodele inferioare. În lungulcoloanei vertebrale se disting patru regiuni: cervical , dorso-lombar , sacral i codal .ă ă ă ş ă

5/14/2018 Mecanisme Pentru Roboti Care Se Deplaseaza Prin Salt - slidepdf.com
http://slidepdf.com/reader/full/mecanisme-pentru-roboti-care-se-deplaseaza-prin-salt
În regiunea gâtului se g se te o singur vertebr care nu corespunde cu atlasulă ş ă ă amniotelor.Regiunea toraco-lombar are vertebre prev zute cu apofize transversale la care s-au sudată ă rudimentele coastei. Acestea nu se unesc într-un stern adev rat. Vertebra unic careă ă
alc tuie teă şregiunea sacral are apofize transverse foarte dezvoltate, servind la articularea cu centuraă
pelvian (fig.8.).ă
Fig.8. Scheletul la broasc , vedere general .ă ă
În urma studiilor prezentate anterior s-au ob inut lan uri cinematice echivalente pentruţ ţ
fiecare component al scheletului, inând seama i de elasticit ile importante. Acesteţ ş ăţ componenteale viitorului mecanism echivalent sunt prezentate în figura 9.
Fig.9. Paralelism între elementele biomecanismului i lan urile cinematice echivalente.ş ţ
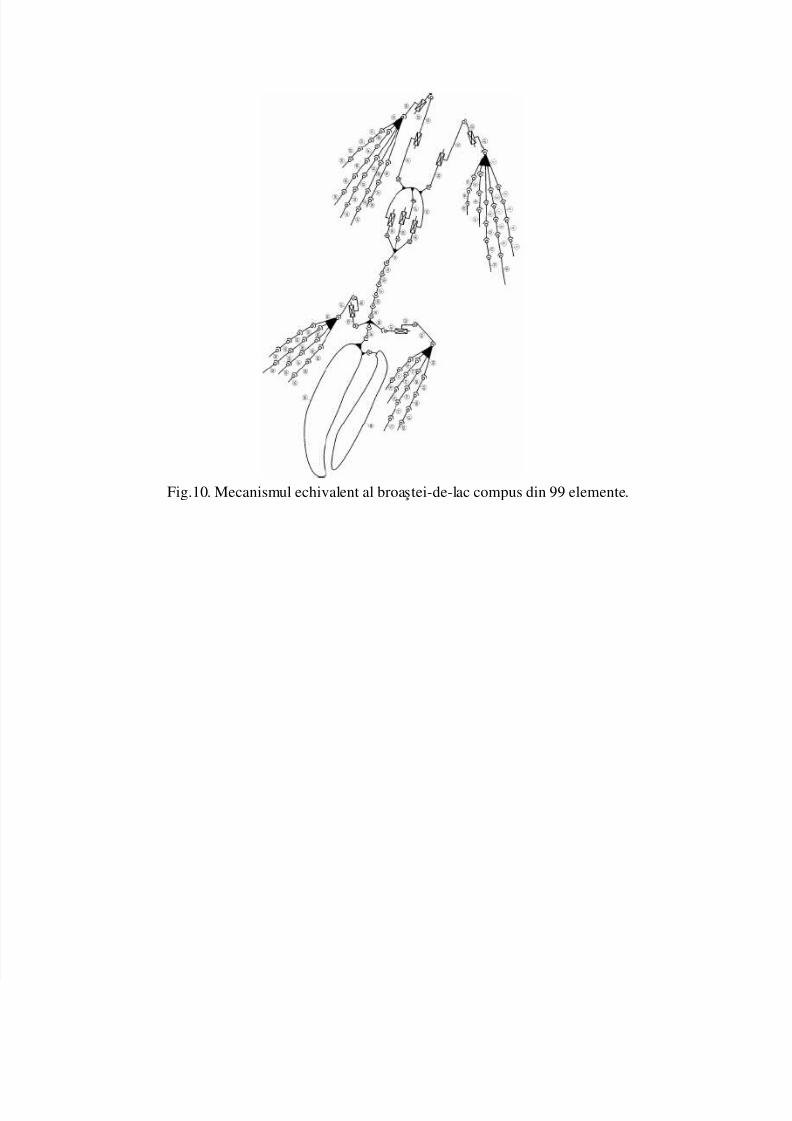
Prin asamblarea lan urilor echivalente biomecanismului se ob ine mecanismul din figuraţ ţ
10.
5/14/2018 Mecanisme Pentru Roboti Care Se Deplaseaza Prin Salt - slidepdf.com
http://slidepdf.com/reader/full/mecanisme-pentru-roboti-care-se-deplaseaza-prin-salt
Fig.10. Mecanismul echivalent al broa tei-de-lac compus din 99 elemente.ş