Mana Mecanica

of 13
-
Upload
david-dragomir -
Category
Documents
-
view
182 -
download
3
description
Proiect robotica
Transcript of Mana Mecanica
-
1
Universitatea Politehnica Bucuresti
Facultatea de Mecanica si Mecatronica
Proiect Robotica
Mana Mecanica cu cama plana de
translatie
Student: Dragomir David
Grupa 541B
2013-2014
-
2
1.Prezentare generala a problematicii mainilor mecanice
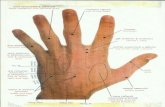
Timp de secole oamenii i-au folosit corpul i n special minile ca spiraie i model pentru creaiile inginereti. Dar copierea mainii umane nu este asa de simpla pe cat pare, structura uscular si scheletica a maini ofer un echilibru unic si greu de egalat, mana este stabil si precis dar in acelai timp rapid i flexibila.
In ciuda complexitatii problemei, multi proiectanti de roboti au apelat
la nenumarate inovatii din diverse discipline aducandu-ne tot mai aproape
de mana complet automatizata. considerata a fi
prima mana robotizata funcional, Handyman, dezvoltat n 1960
de ctre Ralph Mosher pentru General Electric. Aceasta mana era o ghear cu doua degete,
robust articulat, dar aceasta a asezat fundatia pentru urmatoarele incercari.
Mecanismele de prehensiune
reprezint modulele finale ale
manipulatoarelor i roboilor
industriali, avnd funcia de prindere a
obiectelor de lucru, meninerea n
timpul deplasrii acestora i
eliberarea lor la momentul i locul
potrivit. Prinderea se realizeaz de
regul mecanic (prin strngere), dar
exist sisteme la care aceasta se face
prin vacum, electromagnetic etc.
Structura mecanismului de prehensiune depinde de numrul de degete cu care este prevzut dispozitivul de prehensiune. Dexteritatea prehensiunii scade relativ ncet cu numrul degetelor din componena mecanismului de prehensiune.
-
3
Robotul Nasa Omni-hand, construit la inceputul anilor '90, de catre Mark Rosheim, era indemanatic,fiabil si era actionata de un sistem electromecanic ce se afla in palma. Aceasta mana mecanica a fost cea mai avansata si cu cea mai naturala miscare dintre cele create de agentia spatiala in anii '90, motiv pentru care cercetatorii au intentionat sa puna si o manusa pe ea.
Ca si mana umana, aceasta mana robotica permitea departarea si apropierea degetelor (aductie si abductie), miscare permisa datorita folosirii unor articulatii de tip "bila si locas" (sferice) . Articulatia era eficienta si in apucarea obiectelor permitand o strangere de 110 grade a degetelor si o eliberare fata de planul normal de 70 de grade. Articulatiile aveau limitatoare mecanice care nu permiteau articulatiilor degetelor sa se dea peste cap sau sa se stranga prea tare, asemanator unei maini umane.
Folosind un sistem de actionare electromecanic, tendoanele nu au mai fost folosite asadar au fost folosite materiale de lagarurire mai puternice, de exemplu rulmenti cu doua randuri de bile pentru motoare mai puternice. In final degetele erau asemanatoare si puteau fi interschimbabile.
Aceasta proteza de mana de 65000 de dolari este actionata de motoare electrice de foarte mici
dimensiuni si are 5 degete articulate. semnalale de comanda sunt 2 semnale mioelectrice preluate de
pe
terminatiile
nervoase
ale
pacientului
care duceau
spre
membrul
pierdut.
i_limb, cum
este numita
aceasta
proteza,
ofera
pacientului
precizie in
apucarea
de obiecte
precum si o buna forta de apucare si o buna dexteritate, similara celei naturale. Pe langa aceste
caracteristici aceasta mana mai ofera avantajul de a avea degete interschimbabile, ceea ce face
serviceul un pic mai facil si mai putin scump.
-
4
n funcie de poziia mecanismului de prehensiune n raport cu ultimul element al dispozitivului de ghidare apar dou posibiliti: - mecanism de prehensiune avnd degetele paralele cu axa ultimului element al dispozitivului de ghidare ; - mecanism de prehensiune avnd degetele perpendiculare pe axa ultimului element al dispozitivului de ghidare ;
n funcie de modul de prindere al obiectului manipulat apar de asemenea dou
posibiliti: - prindere prin apropierea degetelor prindere exterioar ; - prindere utiliznd o miscare divergent a degetelor prindere interioar ;
Exist si dispozitive de prehensiune duble sau multiple (pentru lungimi mari ale obiectului de manipulat) :
-
5
Exist dispozitive de prehensiune duble care alimenteaz o masin-unealt astfel
nct DP1 este ncrcat si DP2 este nencrcat. Dispozitivele de prehensiune duble se utilizeaz pentru prehensarea unor obiecte
lungi sau pentru livrarea si evacuarea obiectelor de lucru la aceiasi situare a ultimului element al dispozitivului de ghidare.
Miscarea unui deget al dispozitivului de prehensiune se realizeaz fiecare prin intermediul unui mecanism desmodrom. Totalitatea mecanismelor care acioneaz degetele dispozitivului de prehensiune formeaz mecanismul de prehensiune.
Mecanismul de prehensiune ce acioneaz un deget are la baz un lan cinematic desmodrom cu dou, trei sau patru elemente, cteva exemple fiind prezentate n tabelul urmator:
-
6
Motoarele hidraulice se utilizeaz mai rar pentru acionarea MP, doar la RI cu
acionare hidraulic sau dac se necesit fore de strngere mari. Cele mai des utilizate sunt motoarele pneumatice cu motor liniar si care prezint urmtoarele avantaje: - vitez mare; - usurin n racordare la reeaua de aer comprimat; - aerul comprimat fiind fluid elastic confer elasticitate prehensrii;
Acionarea motorului pneumatic cu motor electric rotativ prezint dezavantajul necesitii unei transmisii mecanice ceea ce ngreuneaz subansamblu. Se necesit de asemenea un cuplaj de siguran si un ntreruptor automat.
-
7
Acionarea electromagnetic asigur viteze mari similare cu cele de la acionarea cu pneumo-motor. Se utilizeaz cnd este acionat electric, respectiv dac n secia de exploatare nu exist surs pneumatic.
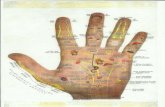
S-a artat, c degetele reprezint elementele conduse ale mecanismului de prehensiune. Ele vin n contact cu obiectul manipulat fie nemijlocit, fie prin intermediul bacurilor pe care le poart. Degetele utilizate n construcia dispozitivelor de prehensiune pot fi rigide-constituind un corp unic, rigide - asamblate din mai multe corpuri, apoi pot fi legate ntre ele prin cuple cinematice de rotaie (degete articulate), elastice si deformabile. Bacurile utilizate n onstrucia dispozitivelor de prehensiune sunt la rndul lor legate rigid de deget, articulate fa de acesta, suprafeele de contact cu obiectul fiind invariabil plane, cilindrice, sferice, tronconice, neregulate oarecare sau cu geometrie variabil.
mbinarea bacurilor cu degete poate fi nedemontabil sau demontabil. n ultimul caz, bacurile se pot schimba n funcie de forma obiectelor care urmeaz a fi manipulate. Unele degete si bacuri cu form geometric variabil se adapteaz la forma geometric a obiectului manipulat (a suprafeei acestuia) si cu capacitatea de a "memora" forma geometric adoptat (degete si bacuri "instruibile").
Degetele constituite dintr-un corp unic rigide au forma unor bare dreptunghiulare sau curbe de diferite seciuni.
Degetele articulate conin fiecare mai multe elemente rigide legate prin cuple cinematice de rotaie, miscarea lor relativ fiind acionat de ctre elementul de acionare al dispozitivului de prehensiune ntr-un mod similar cum sunt acionate falangele degetelor umane, cu fire / cabluri tensoare - extensoare. Ca urmare, elementele componente ale degetului se vor dispune cu suprafeele lor tangente la suprafaa obiectului manipulat, realizndu-se contactul deget-obiect n mai multe puncte, cupla cinematic de clasa VI-a ntre acesta din urm si dispozitivul de prehensiune nchizndu-se prin form ("nvluire").
Siturile relative ale elementelor degetelor se pot menine n timp prin inactivarea elementului care le acioneaz. n acest caz dispozitivul de prehensiune se "instruieste" pentru manipularea unor obiecte de form geometric identic cu forma primei piese prehensate. La schimbarea formei obiectului manipulat, siturile relative ale elementelor degetelor se "uit" prin acionarea miscrii lor relative. Degetele articulate nu poart bacuri.
n figura urmatoare se prezint prehensarea unui obiect cu un dispozitiv de prehensiune avnd degete articulate.
-
8
Degetele deformabile sunt construite din tuburi lise sau gofrate din materiale
plastice. Pentru prehensarea obiectului se introduce n interiorul tuburilor-degete aer comprimat sau depresurizat.
n figura urmatoare se prezint un dispozitiv de prehensiune cu degete deformabile, la care fora de strngere se realizeaz n principal datorit depresiunii aerului din degete si deformrii elastice a degetelor.
-
9
2.Prezentare constructivo-functionala a mainii mecanice proiectate
2.1.Schema cinematica:
3.Memoriu justificativ al calcululelor cinematice si cinetostatice de proiectare:
3.1 Determinarea unghiului de oscilatie y al degetului mainii mecanice functie de variatia diametrului obiectului manipulate
-
10
3.2. Determinarea unghiului de oscilatie y" al degetului mainii mecanice din considerentuI apucarii transversale a obiectului manipulat
3.3 Determinarea erorii de prindere
3.4 Determinarea functiei de forta
3.5 Determinarea fortei de stranger
-
11
3.6 Determinarea fortei de stranger effective
3.7 Determinearea cursei pistonului motorului de actionare
3.8 Dimensionarea motorului liniar de actionare
-
12
-
13