Fuzzy Control
3
(R.-E. Precup, UPT, 2011) 1. INTRODUCERE ÎN PROBLEMATICĂ Abordarea inginerească „clasică” a realităţii este prin esenţă o abordare calitativă şi cantitativă, bazată pe o modelare matematică mai mult sau mai puţin exactă. Întro astfel de abordare, exprimări de genul „temperatură potrivită”, „umiditate ridicată”, „presiune redusă”, „viteză foarte mare” etc., legate de mărimile caracteristice ale unui proces condus, sunt din punct de vedere cantitativ greu interpretabile. Acest lucru se datorează faptului că în automatica „clasică”, convenţională, mărimile / informaţiile sunt prelucrate cu o valoare numerică bine precizată. În acest context, elaborarea strategiei de conducere şi a dispozitivului de conducere necesită de asemenea o modelare cantitativă cât mai exactă a procesului. Strategiile de conducere adaptivă necesită chiar permanenta reevaluare a modelelor sau / şi a valorilor parametrilor care caracterizează aceste modele (parametrice). Conducerea fuzzy (fuzzy control, fuzzy logic control) este bazată pe teoria mulţimilor fuzzy (vagi, fuzzy set theory) şi este din acest punct de vedere mai pragmatică, putând prelua şi utiliza o caracterizare lingvistică a calităţii desfăşurării procesului şi adapta ulterior această caracterizare în funcţie de cerinţele concrete de desfăşurare a acestuia. Bazele teoriei mulţimilor fuzzy au fost puse de L. A. Zadeh (Zadeh, 1965) printro lucrare ce părea în prima fază doar de natura unui amuzament matematic. Explozia din anii ’70 în domeniul tehnicii de calcul a deschis primele perspective de aplicare în practică a teoriei (care între timp se clădise) în domeniul conducerii automate / reglajului automat sub forma regulatoarelor bazate pe teoria mulţimilor fuzzy, numite regulatoare fuzzy (fuzzy controllers, fuzzy logic controllers). Aceste prime aplicaţii sunt atribuite lui E. H. Mamdani (Mamdani, 1974). Aplicaţia industrială din domeniul conducerii fuzzy – considerată de referinţă în literatură – se referă la utilizarea regulatoarelor fuzzy în conducerea unui cuptor rotativ pentru fabricarea cimentului (Holmblad şi Ostergaard, 1982). Ulterior, după anul 1980, în Japonia, apoi SUA şi ceva mai târziu în Europa are loc o adevărată „explozie” în domeniul aplicaţiilor de conducere fuzzy în cele mai diverse domenii, de la industria electrocasnică până la conducerea vehiculelor de transport şi roboţilor industriali (perioada anilor ’80 – ’90 este cunoscută sub denumirea de fuzzy boom). Acest lucru se datorează în bună parte dezvoltărilor spectaculoase în tehnologia electronică şi evoluţiei sistemelor de calcul, care au permis atât realizarea unor circuite cu viteză foarte mare de prelucrare a informaţiei (a căror construcţie şi utilizare poate fi subordonată unui anumit scop, în particular prelucrării informaţiei vagi) cât şi dezvoltarea unor programe de proiectare asistată de calculator care permit inginerului precizarea şi utilizarea eficientă a unei cantităţi mari de informaţii referitoare la procesul condus şi la dispozitivul de conducere. Aplicaţiile funcţionale de conducere fuzzy evidenţiază două aspecte importante referitoare la această tehnică de conducere faţă de conducerea convenţională, şi anume: • În anumite situaţii (de exemplu, conducerea proceselor cu neliniarităţi funcţionale greu modelabile) conducerea fuzzy poate fi o alternativă viabilă a conducerii clasice („ferme”, crisp). • În raport cu conducerea clasică, conducerea fuzzy poate fi bazată şi axată puternic pe experienţa unui operator uman, experienţă pe care regulatorul fuzzy o poate surprinde mai fidel decât un regulator convenţional. Principalele particularităţi ale conducerii fuzzy pot fi sintetizate prin următoarele: • Regulatoarele fuzzy (RG-F) asigură caracteristici statice neliniare, modificabile după nevoi. • Conducerea fuzzy poate fi efectuată după mai multe mărimi ale procesului, fiind încadrabilă din acest punct de vedere în categoria structurilor de conducere cu conexiuni multiple. Prin aceasta, regulatoarele fuzzy devin multivariabile la intrare (eventual şi la ieşire) şi se apropie ca şi conţinut de regulatoarele (neliniare) după stare. • Principial, regulatoarele fuzzy sunt regulatoare fără dinamică, dar domeniile de utilizare şi performanţele RG-F respectiv ale sistemelor de reglare fuzzy (sisteme de reglare automată cu RG-F, apelate şi sub forma SRA cu RG-F) pot fi lărgite prin extinderea RG-F propriu-zise cu module cu dinamică. Ca efect se obţin aşa-numitele RG-F cu dinamică denumite şi RG-F tipizate prin analogie cu situaţia regulatoarelor convenţionale deoarece dinamica introdusă creează componente de tip derivativ sau / şi integrator.
-
Upload
dorin-pleava -
Category
Documents
-
view
14 -
download
1
description
Fuzzy Control
Transcript of Fuzzy Control

(R.-E. Precup, UPT, 2011) 1. INTRODUCERE ÎN PROBLEMATICĂ
Abordarea inginerească „clasică” a realităţii este prin esenţă o abordare calitativă şi cantitativă, bazată pe o modelare matematică mai mult sau mai puţin exactă. Întro astfel de abordare, exprimări de genul „temperatură potrivită”, „umiditate ridicată”, „presiune redusă”, „viteză foarte mare” etc., legate de mărimile caracteristice ale unui proces condus, sunt din punct de vedere cantitativ greu interpretabile. Acest lucru se datorează faptului că în automatica „clasică”, convenţională, mărimile / informaţiile sunt prelucrate cu o valoare numerică bine precizată. În acest context, elaborarea strategiei de conducere şi a dispozitivului de conducere necesită de asemenea o modelare cantitativă cât mai exactă a procesului. Strategiile de conducere adaptivă necesită chiar permanenta reevaluare a modelelor sau / şi a valorilor parametrilor care caracterizează aceste modele (parametrice). Conducerea fuzzy (fuzzy control, fuzzy logic control) este bazată pe teoria mulţimilor fuzzy (vagi, fuzzy set theory) şi este din acest punct de vedere mai pragmatică, putând prelua şi utiliza o caracterizare lingvistică a calităţii desfăşurării procesului şi adapta ulterior această caracterizare în funcţie de cerinţele concrete de desfăşurare a acestuia. Bazele teoriei mulţimilor fuzzy au fost puse de L. A. Zadeh (Zadeh, 1965) printro lucrare ce părea în prima fază doar de natura unui amuzament matematic. Explozia din anii ’70 în domeniul tehnicii de calcul a deschis primele perspective de aplicare în practică a teoriei (care între timp se clădise) în domeniul conducerii automate / reglajului automat sub forma regulatoarelor bazate pe teoria mulţimilor fuzzy, numite regulatoare fuzzy (fuzzy controllers, fuzzy logic controllers). Aceste prime aplicaţii sunt atribuite lui E. H. Mamdani (Mamdani, 1974). Aplicaţia industrială din domeniul conducerii fuzzy – considerată de referinţă în literatură – se referă la utilizarea regulatoarelor fuzzy în conducerea unui cuptor rotativ pentru fabricarea cimentului (Holmblad şi Ostergaard, 1982). Ulterior, după anul 1980, în Japonia, apoi SUA şi ceva mai târziu în Europa are loc o adevărată „explozie” în domeniul aplicaţiilor de conducere fuzzy în cele mai diverse domenii, de la industria electrocasnică până la conducerea vehiculelor de transport şi roboţilor industriali (perioada anilor ’80 – ’90 este cunoscută sub denumirea de fuzzy boom). Acest lucru se datorează în bună parte dezvoltărilor spectaculoase în tehnologia electronică şi evoluţiei sistemelor de calcul, care au permis atât realizarea unor circuite cu viteză foarte mare de prelucrare a informaţiei (a căror construcţie şi utilizare poate fi subordonată unui anumit scop, în particular prelucrării informaţiei vagi) cât şi dezvoltarea unor programe de proiectare asistată de calculator care permit inginerului precizarea şi utilizarea eficientă a unei cantităţi mari de informaţii referitoare la procesul condus şi la dispozitivul de conducere. Aplicaţiile funcţionale de conducere fuzzy evidenţiază două aspecte importante referitoare la această tehnică de conducere faţă de conducerea convenţională, şi anume: • În anumite situaţii (de exemplu, conducerea proceselor cu neliniarităţi funcţionale greu modelabile)
conducerea fuzzy poate fi o alternativă viabilă a conducerii clasice („ferme”, crisp). • În raport cu conducerea clasică, conducerea fuzzy poate fi bazată şi axată puternic pe experienţa unui
operator uman, experienţă pe care regulatorul fuzzy o poate surprinde mai fidel decât un regulator convenţional.
Principalele particularităţi ale conducerii fuzzy pot fi sintetizate prin următoarele: • Regulatoarele fuzzy (RG-F) asigură caracteristici statice neliniare, modificabile după nevoi. • Conducerea fuzzy poate fi efectuată după mai multe mărimi ale procesului, fiind încadrabilă din acest
punct de vedere în categoria structurilor de conducere cu conexiuni multiple. Prin aceasta, regulatoarele fuzzy devin multivariabile la intrare (eventual şi la ieşire) şi se apropie ca şi conţinut de regulatoarele (neliniare) după stare.
• Principial, regulatoarele fuzzy sunt regulatoare fără dinamică, dar domeniile de utilizare şi performanţele RG-F respectiv ale sistemelor de reglare fuzzy (sisteme de reglare automată cu RG-F, apelate şi sub forma SRA cu RG-F) pot fi lărgite prin extinderea RG-F propriu-zise cu module cu dinamică. Ca efect se obţin aşa-numitele RG-F cu dinamică denumite şi RG-F tipizate prin analogie cu situaţia regulatoarelor convenţionale deoarece dinamica introdusă creează componente de tip derivativ sau / şi integrator.

8 Introducere în problematică – 1 (R.-E. Precup, UPT, 2011) • RG-F prezintă maleabilitate în modificarea proprietăţilor de transfer prin caracteristicile statice
aferente, ceea ce asigură posibilitatea realizării, întro varietate mare, a structurilor de conducere adaptivă (neliniară).
Abordarea bazată pe experienţa umană se manifestă în cazul conducerii fuzzy prin formularea cerinţelor de conducere respectiv prin elaborarea comenzii de către RG-F cu ajutorul unor reguli „naturale”, care formează un set de reguli de forma:
...)(concluzia ATUNCI (premiza) DACÃ
..., (1.1)
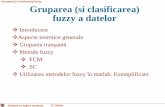
în care premiza se va referi la situaţia constatată privind evoluţia procesului (comparată, de regulă, cu evoluţia dorită) iar concluzia se va referi la măsurile care trebuie luate – sub sub forma comenzii u – pentru asigurarea evoluţiei dorite. Ansamblul acestor reguli constituie baza de reguli a RG-F. Schema bloc de principiu (considerată clasică în literatură) aferentă unui sistem de reglare fuzzy monovariabil din punctul de vedere al referinţei (r) şi al ieşirii de măsură (y) este prezentată în fig.1.1 (a). Particularitatea esenţială, deja amintită, este cea a conexiunilor multiple dinspre proces către regulator prin mărimi auxiliare, reunite în vectorul ya, care sunt direct sau indirect mărimi de intrare în regulator. Indiferent de numărul mărimilor de intrare în RG-F, surprinse în vectorul e,
[ ] [ ]TnTa eeee ...211 == ye , acesta trebuie să aibă cel puţin una, notată în schemă cu e1, care să
corespundă erorii de reglare:
yree −==ε=1 . (1.2)
Intrarea de perturbaţie este notată cu v în fig.1.1 (a).
Fig.1.1. Schema bloc de principiu a unui sistem de reglare fuzzy.
Principial, funcţionarea unui RG-F în forma sa clasică, de tip Mamdani, are loc după schema bloc informaţională din fig.1.1 (b) şi presupune următoarea succesiune de operaţii: (1) Informaţia fermă de la intrare (mărimi măsurate, referinţa, eroarea de reglare) este convertită întro
reprezentare fuzzy. Această operaţie este denumită fuzzificarea informaţiei ferme. (2) Informaţia fuzzificată este prelucrată utilizând o bază de reguli de forma (1.1), care în vederea
conducerii procesului în cauză trebuie să fie bine precizată. Principiile de prelucrare a bazei de reguli poartă denumirea de mecanism de inferenţă iar rezultatul îl constituie forma vagă a comenzii (comanda vagă).
(3) Comanda fuzzy trebuie convertită întro exprimare fermă, cu valoare numerică bine precizată şi, ulterior, şi natură fizică bine precizată, direct utilizabilă la nivelul elementului de execuţie. Operaţia poartă denumirea de defuzzificare.

(R.-E. Precup, UPT, 2011) 1 Introducere în problematică 9 Cele trei operaţii descrise succint anterior caracterizează şi cele trei module din componenţa RG-F, modulul de fuzzificare (1), modulul de inferenţă (2) şi modulul de defuzzificare (3). Toate sunt asistate de o bază de date adecvată. În capitolele următoare vor fi abordate următoarele aspecte specifice studiului, înţelegerii, proiectării şi implementării SRA cu RG-F: • Mulţimi şi logică fuzzy. • Mecanismele de funcţionare aferente schemelor de RG-F în diverse structuri. • Influenţele pe care diferitele elemente adaptabile ale structurilor de RG-F le au asupra proprietăţilor
de transfer ale RG-F. • Metodologii de proiectare sistematică a RG-F în diverse structuri de reglare automată. • Detalii de implementare a RG-F. Este urmărit stilul ingineresc din cărţile (Preitl şi Precup, 1997) şi (Precup şi Preitl, 1999) dedicate SRA cu RG-F de tip Mamdani. Pentru tratarea sistematică a SRA cu RG-F de tip Takagi-Sugeno sunt necesare cunoştinţe avansate de matematică şi din domenii înrudite. Bibliografie S. Preitl, R.-E. Precup (1997): Introducere în conducerea FUZZY a proceselor, Editura Tehnică, Bucureşti. R.-E. Precup, S. Preitl (1999): Fuzzy Controllers, Editura Orizonturi Universitare, Timişoara. R.-E. Precup (2000): Soluţii de conducere fuzzy a sistemelor cu fază neminimă, Editura Orizonturi Universitare, Timişoara. S. Preitl, R.-E. Precup (2007): Regulatoare pentru servosisteme. Metode de proiectare, Editura Orizonturi Universitare, Timişoara. S. Preitl, R.-E. Precup (2008): Tehnici de proiectare a structurilor de reglare automată. Aplicaţii, Editura Orizonturi Universitare, Timişoara.