Figura 2.1 prezintă evoluţia răspunsului în cazul p ... 2.pdf · Figura 2.1 prezintă evoluţia...
2
Laborator 2 – I.S.A. Sisteme liniare de ordinul I şi II 1. Introducere 1 2. Sistemul de ordinul I cu timp continuu 1 3. Sistemul de ordinul II cu timp continuu 3 3.1 Exemple 4 4. Cerinţele lucrării de laborator 4 1. Introducere Acest laborator urmăreşte: • Prezentarea sistemelor liniare de ordinul I şi II • Analiza şi simularea răspunsului sistemelor liniare de ordinul I şi II la mărimi de intrare standard de tip: treaptă, rampă şi sinusoidal 2. Sistemul de ordinul I cu timp continuu Un sistem liniar cu timp continuu de ordinul I are funcţia de transfer de forma: · (2.1) unde: k este factorul de amplificare; τ este constanta de timp a sistemului. Răspunsul sistemului de ordinul I cu timp continnuu la o intrare treaptă unitară este: ·· ·1 (2.2) 2 Ingineria Sistemelor Automate – Laborator 01 Figura 2.1 prezintă evoluţia răspunsului în cazul particular când k = 2. Figura 2.1 Răspunsul unui sistem de ordinul I la o intrare treaptă unitară De remarcat faptul că tangenta la grafic în origine este . Prin urmare tangenta atinge valoarea finală (în exemplul din Figura 2.1 aceasta este y(t) = 2) după un timp egal cu constanta de timp a sistemului. Această proprietate se poate folosi pentru a determina parametrii unui sistem de ordinul I analizând răspunsul lui la o intrare treaptă: a) se identifică factorul de amplificare k = (valoarea finală a răspunsului)/comandă; b) se identifică constanta de timp τ ca fiind abscisa (timpul) punctului unde tangenta în origine intersectează valoarea finală. Alternativ, τ se poate obţine ca fiind timpul necesar răspunsului să ajungă la 63% din valoarea finală, deoarece 1 0.63 · . Regimul tranzitoriu se poate considera încheiat după circa 4 constante de timp, când răspunsul ajunge la 1 0.98 · , adică la 98% din valoarea finală. Notă: În forma cea mai generală, un sistem cu timp continuu de ordinul I are funcţia de transfer (2.3) unde şi . Comparativ cu (2.1), această reprezentare include şi cazul când a = 0, adică sistemul este un integrator pur. (2.3)
Transcript of Figura 2.1 prezintă evoluţia răspunsului în cazul p ... 2.pdf · Figura 2.1 prezintă evoluţia...
Laborator 2 – I.S.A.
Sisteme liniare de ordinul I şi II
1. Introducere 1
2. Sistemul de ordinul I cu timp continuu 1
3. Sistemul de ordinul II cu timp continuu 3
3.1 Exemple 4
4. Cerinţele lucrării de laborator 4
1. Introducere
Acest laborator urmăreşte: • Prezentarea sistemelor liniare de ordinul I şi II • Analiza şi simularea răspunsului sistemelor liniare de ordinul I şi II la mărimi de intrare
standard de tip: treaptă, rampă şi sinusoidal
2. Sistemul de ordinul I cu timp continuu
Un sistem liniar cu timp continuu de ordinul I are funcţia de transfer de forma:
���� � ���·� (2.1)
unde: k este factorul de amplificare;
τ este constanta de timp a sistemului.
Răspunsul sistemului de ordinul I cu timp continnuu la o intrare treaptă unitară este:
�� � � ��� � ����·��·�� � ��� ��
� � ����
�� � � · �1 � ���
�� (2.2)
2 Ingineria Sistemelor Automate – Laborator 01
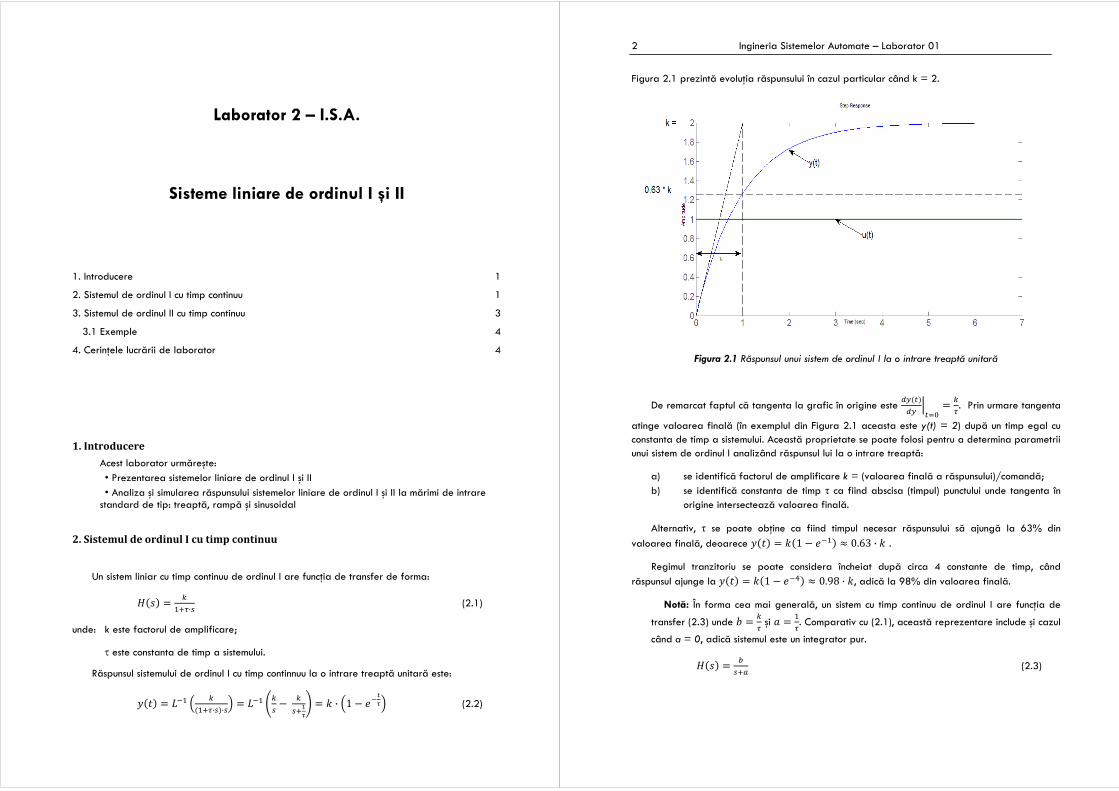
Figura 2.1 prezintă evoluţia răspunsului în cazul particular când k = 2.
Figura 2.1 Răspunsul unui sistem de ordinul I la o intrare treaptă unitară
De remarcat faptul că tangenta la grafic în origine este �������� �!" � �
. Prin urmare tangenta
atinge valoarea finală (în exemplul din Figura 2.1 aceasta este y(t) = 2) după un timp egal cu constanta de timp a sistemului. Această proprietate se poate folosi pentru a determina parametrii unui sistem de ordinul I analizând răspunsul lui la o intrare treaptă:
a) se identifică factorul de amplificare k = (valoarea finală a răspunsului)/comandă; b) se identifică constanta de timp τ ca fiind abscisa (timpul) punctului unde tangenta în
origine intersectează valoarea finală.
Alternativ, τ se poate obţine ca fiind timpul necesar răspunsului să ajungă la 63% din
valoarea finală, deoarece �� � � ��1 � ���� # 0.63 · � .
Regimul tranzitoriu se poate considera încheiat după circa 4 constante de timp, când răspunsul ajunge la �� � � ��1 � ��(� # 0.98 · �, adică la 98% din valoarea finală.
Notă: În forma cea mai generală, un sistem cu timp continuu de ordinul I are funcţia de
transfer (2.3) unde + � � şi , � �
. Comparativ cu (2.1), această reprezentare include şi cazul
când a = 0, adică sistemul este un integrator pur.
���� � -��. (2.3)
Ingineria Sistemelor Automate – Laborator 01 3
3. Sistemul de ordinul II cu timp continuu
Un sistem de ordinul II cu timp continuu şi amplificare unitară (H(0) =1) are funcţia de transfer de forma:
���� � /0�0�1·2·/·��/0 (2.4)
unde: ω este pulsaţia naturală a sistemului;
ξ este factorul de amortizare.
Relaţia (2.4) este forma cea mai generală de reprezentare a unui sistem de ordinul II. Dacă:
• 3 4 1 , H(s) are 2 poli reali (identici când 3 � 1 ), în zona de stabilitate C-. În acest caz, H(s) se poate descompune în 2 funcţii de transfer de ordinul I.
• 0 5 3 5 1, H(s) are 2 poli complex conjugaţi, în zona de stabilitate C-:
��,1 � �3 · 7 8 9 · 7 · :1 � 31 (2.5)
• 3 � 0 , H(s) are 2 poli complex conjugaţi ��,1 � 89 · 7 pe axa imaginară, sistemul fiind oscilant
• 3 5 0 , H(s) are poli în C+ , deci în zona de instabilitate.
În cele ce urmează se va analiza cazul 0 5 3 5 1, care corespunde unui sistem de ordinul II, cu poli complex conjugaţi plasaţi în zona de stabilitate.
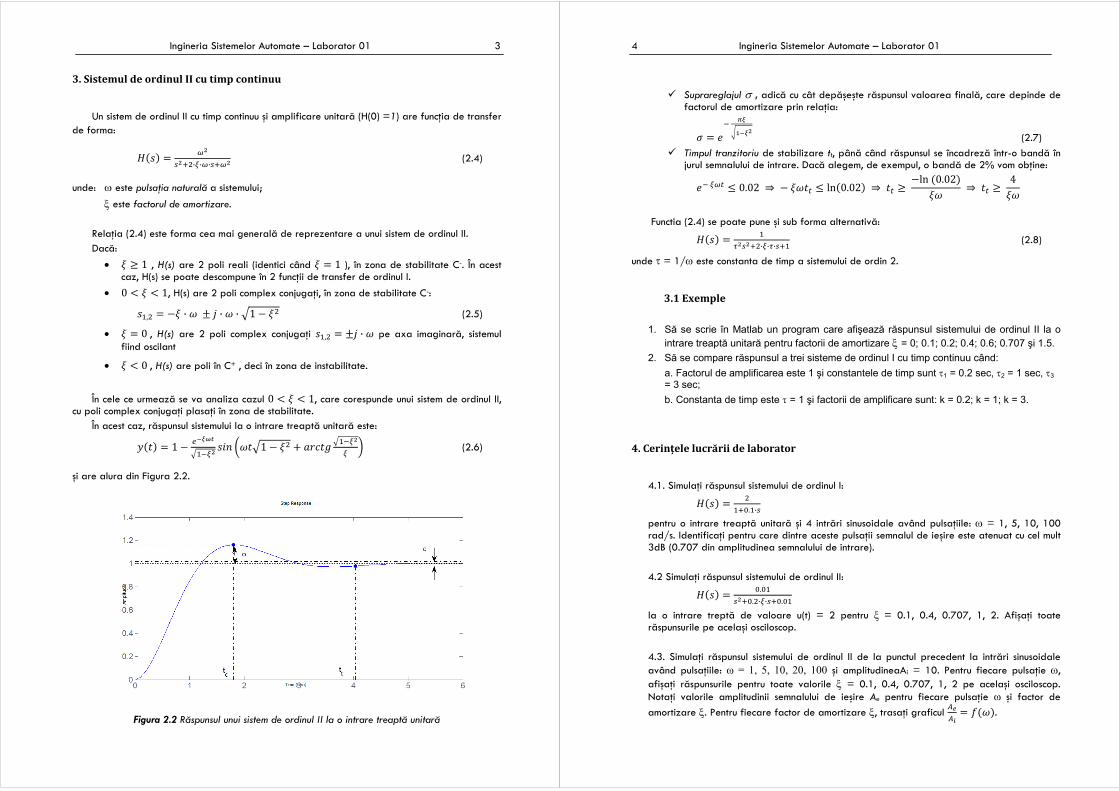
În acest caz, răspunsul sistemului la o intrare treaptă unitară este:
�� � � 1 � ;<=>�:��20 �?@ A7 :1 � 31 B ,CD E :��20
2 F (2.6)
şi are alura din Figura 2.2.
Figura 2.2 Răspunsul unui sistem de ordinul II la o intrare treaptă unitară
4 Ingineria Sistemelor Automate – Laborator 01
� Suprareglajul σ , adică cu cât depăşeşte răspunsul valoarea finală, care depinde de factorul de amortizare prin relaţia:
G � �� H=
I�<=0 (2.7)
� Timpul tranzitoriu de stabilizare tt, până când răspunsul se încadreză într-o bandă în jurul semnalului de intrare. Dacă alegem, de exempul, o bandă de 2% vom obţine:
�� 2/� J 0.02 L � 37 � J ln�0.02� L � 4 �ln �0.02�37 L � 4 4
37
Functia (2.4) se poate pune şi sub forma alternativă:
���� � �0�0�1·2··��� (2.8)
unde τ = 1/ω este constanta de timp a sistemului de ordin 2.
3.1 Exemple
1. Să se scrie în Matlab un program care afişează răspunsul sistemului de ordinul II la o
intrare treaptă unitară pentru factorii de amortizare ξ = 0; 0.1; 0.2; 0.4; 0.6; 0.707 şi 1.5.
2. Să se compare răspunsul a trei sisteme de ordinul I cu timp continuu când:
a. Factorul de amplificarea este 1 şi constantele de timp sunt τ1 = 0.2 sec, τ2 = 1 sec, τ3 = 3 sec;
b. Constanta de timp este τ = 1 şi factorii de amplificare sunt: k = 0.2; k = 1; k = 3.
4. Cerinţele lucrării de laborator
4.1. Simulaţi răspunsul sistemului de ordinul I:
���� � 1��".�·�
pentru o intrare treaptă unitară şi 4 intrări sinusoidale având pulsaţiile: ω = 1, 5, 10, 100 rad/s. Identificaţi pentru care dintre aceste pulsaţii semnalul de ieşire este atenuat cu cel mult 3dB (0.707 din amplitudinea semnalului de intrare). 4.2 Simulaţi răspunsul sistemului de ordinul II:
���� � "."��0�".1·2·��"."�
la o intrare treptă de valoare u(t) = 2 pentru ξ = 0.1, 0.4, 0.707, 1, 2. Afişaţi toate răspunsurile pe acelaşi osciloscop. 4.3. Simulaţi răspunsul sistemului de ordinul II de la punctul precedent la intrări sinusoidale având pulsaţiile: ω = 1, 5, 10, 20, 100 şi amplitudineaAi = 10. Pentru fiecare pulsaţie ω, afişaţi răspunsurile pentru toate valorile ξ = 0.1, 0.4, 0.707, 1, 2 pe acelaşi osciloscop. Notaţi valorile amplitudinii semnalului de ieşire Ae pentru fiecare pulsaţie ω şi factor de
amortizare ξ. Pentru fiecare factor de amortizare ξ, trasaţi graficul PQPR � S�7�.