Elemente de Baza in Rezistenta Materialelor
190
Cornel MARIN ELEMENTE DE BAZĂ ÎN REZISTENŢA MATERIALELOR ŞI TEORIA ELASTICITĂŢII
-
Upload
bogdan-dobrina -
Category
Documents
-
view
3.056 -
download
20
Transcript of Elemente de Baza in Rezistenta Materialelor

Cornel MARIN
ELEMENTE DE BAZĂ ÎN REZISTENŢA
MATERIALELOR ŞI TEORIA ELASTICITĂŢII

1
dr. ing. Cornel MARIN
ELEMENTE DE BAZĂ ÎN REZISTENŢA
MATERIALELOR ŞI TEORIA ELASTICITĂŢII
Recenzia ştiinţifică:
Prof. dr. ing. Nicolae ILIESCU
Conf. dr. ing. Anton Marian HADAR

2
Descrierea CIP a Bibliotecii Naţionale a României
MARIN, CORNELELEMENTE DE BAZĂ ÎN REZISTENŢA MATERIALELOR ŞI TEORIA
ELASTICITĂŢII / Cornel Marin, - Târgovişte : Editura Macarie, 2002
210 p; 25cm - (Universitaria)
Bibliogr.
ISBN
I. -
Tehnoredactare computerizată: Cornel MARIN
2002 - Toate drepturile sunt rezervate autorului

3
CUPRINSPREFAŢĂCAPITOLUL I – INTRODUCERE1.1. Obiectul disciplinei Rezistenţa Materialelor1.2. Problemele Rezistenţei materialelor1.3. Metode de studiu, modele de calcul şi ipoteze de lucru folosite în Rezistenţa materialelor1.4. Clasicarea sarcinilor exterioare1.5. Forţe elementare interioare şi eforturi1.6. Tensiuni, deformaţii şi deplasări1.7. Curba caracteristică a materialului1.8. Coeficienţi de siguranţă şi rezisenţe admisibile
CAPITOLUL II – DIAGRAME DE EFORTURI ÎN BARELE DREPTE. RELAŢIILEDIFERENŢIALE ÎNTRE EFORTURI2.1. Diagrame de eforturi axiale2.2. Diagrame de eforturi tăietoare şi eforturi încovoietoare2.3. Diagrame de eforturi torsionale
CAPITOLUL III – CARACTERISTICI GEOMETRICE ALE SECŢIUNILOR PLANE3.1. Definiţii3.2. Calculul momentelor de inerţie la translaţia axelor. Formulele lui Steiner.3.3. Variaţia momentelor de inerţie cu rotaţia axelor3.4. Valori extreme ale momentelor de inerţie axiale3.5. Cercul momentelor de inerţie3.6. Caracteristici geometrice ale secţiunilor plane simple3.7. Caracteristici geometrice ale secţiunilor plane compuse
CAPITOLUL IV – ÎNCOVOIEREA BARELOR DREPTE4.1. Definiţii4.2. Tensiunea la încovoierea pură. Formula lui Navier4.3. Calcule de rezistenţă ale barelor supuse la încovoiere4.4. Tensiuni tangenţiale la încovoierea simplă. Formula lui Juravski4.5. Lunecarea longitudinală a barelor cu secţiune compusă supuse la încovoiere simplă.4.6. Deformaţiile barelor supuse la încovoiere. Ecuaţia diferenţială a fibrei medii deformate.a. Metoda funcţiei de încărcare sau a funcţiei de forţăb. Metoda lui Mohr
CAPITOLUL V – GRINZI CONTINUEa. Ecuaţia celor trei momente sau ecuaţia lui Clapeyron.b. Metoda funcţiei de încărcare.5.1. Grinda continuă pe trei reazeme rigide punctuale situate la acelaşi nivel cu axa barei.5.2. Grinda continuă pe patru reazeme rigide punctuale situate la acelaşi nivel cu axa barei.5.3. Grinda continuă încastrată la un capăt şi situată pe un reazem punctual la acelaşi nivel cu axa barei.5.4. Grinda continuă încastrată la un capăt şi situată pe două reazeme punctuale la acelaşinivel cu axa barei.5.5. Grinda continuă încastrată la ambele capete fără reazem intermediar.5.6. Grinda continuă încastrată la ambele capete şi situată pe un reazem punctual la acelaşi

4
nivel cu axa barei .CAPITOLUL VI – ÎNTINDEREA ŞI COMPRESIUNEA BARELOR DREPTE6.1. Generalităţi.6.2. Tensiuni şi deformaţii în bara solicitată la întindere compresiune.6.3. Deformaţii şi deplasări.6.4. Energia potenţială de deformaţie la solicitarea de întindere-compresiune6.5. Probleme static nedeterminate de întintindere şi compresiune
CAPITOLUL VII – RĂSUCIREA BARELOR DREPTE DE SECŢIUNE CIRCULARĂŞI INELARĂ7.1. Generalităţi.7.2. Tensiuni tangenţiale şi deformaţii la răsucire7.3. Energia potenţială de deformaţie la solicitarea de răsucire7.4. Calculul arcurilor elicoidale cilindrice
CAPITOLUL VIII – STUDIUL DEPLASĂRILOR PRIN METODE ENERGETICE8.1. Generalităţi.8.2. Lucrul mecanic al forţelor sau cuplurilor exterioare8.3. Teorema reciprocităţii lucrului mecanic (Betti)8.4. Teorema reciprocităţii deplasărilor (Maxwell)8.5. Metoda Mohr Maxwell pentru calculul deplasărilora. Calculul deplasărilor la solicitarea de întindere - compresiuneb. Calculul deplasărilor şi rotirilor la solicitarea de încovoierec. Calculul rotirilor la solicitarea de răsucire8.6. Metoda lui Vereşceaghin de integrare grafică8.7. Regula lui Simpson pentru calculul integralelor8.8. Teorema lui Castigliano
CAPITOLUL IX – SISTEME STATIC NEDETERMINATE DIN BARE DREPTE9.1. Generalităţi9.2. Metoda eforturilor. Sisteme de bază9.3. Aplicaţia 19.4. Simetrii în sisteme static nedeterminate9.5. Calculul deplasărilor în sisteme static nedeterminate9.6. Aplicaţia 2
CAPITOLUL X–FLAMBAJUL DE COMPRESIUNE AXIALĂ A BARELOR DREPTE10.1 Generalităţi10.2. Formulel lui Euler pentru calculul forţei critice de flambaj de compresiune al bareidrepte10.3. Limitele de aplicare ale formulei lui Euler. Flambajul elastic şi plastic.10.4. Calculul la flambaj al barelor drepte.
CAPITOLUL XII – SOLICITĂRI SIMPLE ALE BAREI CURBE PLANE CU AXACIRCULARE11.1. Relaţii diferenţiale dintre eforturi şi sarcinile exterioare. Diagrame de efortuturi11.2. Tensiuni în bare curbe plane cu axa circulară11.3. Calculul deplasărilor pentru bare curbe plane11.4. Aplicaţie

5
CAPITOLUL XII – SOLICITĂRI DINAMICE12.1. Generalităţi12.2. Solicitări dinamice prin forţe de inerţie12.3. Solicitări dinamice prin şoc
CAPITOLUL XIII – ELEMENTE DE TEORIA ELASTICITĂŢII
13.1. STAREA SPAŢIALĂ DE TENSIUNI ŞI DEFORMAŢII ÎN JURUL UNUIPUNCT DIN INTERIORUL UNUI CORP ELASTIC13.1.1. Componentele tensorului tensiunilor din jurul unui punct din interiorul corpului elastic13.1.2. Componentele tensorului deformaţiilor in jurul unui punct din interiorul corpuluielastic13.1.3. Ecuaţiile diferenţiale de echilibru ale tensiunilor. Condiţiile de contur.13.1.4. Ecuaţiile diferenţiale ale deformaţiilor elastice. Ecuaţiile geometrice (formuleleCauchy)13.1.5. Condiţiile de continuitate ale deformaţiilor elastice sau ecuaţiile lui Saint Venant.13.1.6. Legea lui Hooke generalizată (ecuaţiile fizice).13.1.7. Variaţia tensiunlor din interiorul unui corp. Tensiuni şi direcţii principale. Elipsoidultensiunilor. Tensiuni octaedrice. Cercurile tensiunilor.13.1.8. Variaţia deformaţiilor din interiorul unui corp. Deformaţii şi direcţii principale. Relaţiadintre constantele E, G, ν.13.1.9. Deformaţia volumică specifică (ecuaţia lui Poisson)13.1.10. Expresia energiei potenţiale de deformaţie totale, de modificare a formei şi demodificare a volumului
13.2. STAREA PLANĂ DE TENSIUNI ŞI DEFORMAŢII ÎN JURUL UNUI PUNCTDIN INTERIORUL UNUI CORP ELASTIC13.1.1. Tensiuni şi direcţii principale penru starea plană de tensiuni. Cercul lui Mohr.13.1.2. Cazuri particulare ale stării plane de tensiuni
CAPITOLUL XIV – TEORII DE REZISTENŢĂ14.1. Generalităţi14.2. Teoriile clasice de rezistenţă14.3. Teoria lui Mohr

6
PREFAŢĂAceastă lucrare este rezultatul experienţei autorului în activitatea de curs şi seminar la
disciplina Rezistenţa materialelor, activitate desfăşurată începând din 1994 cu studenţii
Facultăţii de Inginerie Electrică şi Colegiului Universitar Tehnic din cadrul Universităţii
“Valahia” Târgovişte.
Lucrarea cuprinde 14 capitole fiind structurată într-o formă clasică, cu o parte teoretică
de prezentare bine fundamentată şi cu aplicaţii practice specifice, într-o formă accesibilă sper,
tuturor studenţilor de la specializările facultăţilor şi colegiilor tehnice , fiind în concordanţă cu
Programa analitică a disciplinei Rezistenţei materialelor (partea I).
Autorul speră că prezentarea sub această formă a teoriei şi problemelor de Rezistenţa
materialelor va fi utilă pentru însuşirea cunpştinţelor de bază de către toţi studenţii interesaţi,
precum şi pentru rezolvarea unor aplicaţii practice inginereşti de către ingineri şi specialiştii
proiectanţi în domeniul mecanic. De asemenea autorul recomandă folosirea în paralel cu acest
curs pentru partea aplicativă a culegerii de probleme apărută anterior în Editura Macarie în
anul 2001: REZISTENŢA MATERIALELOR- PROBLEME DE EXAMEN. Acest curs şi
culegerea de probleme sunt disponibile şi pe site-ul Universităţii Valahia Târgovişte care
poate fi accesat pe adresa: www/intranet/valahia.ro.
Autorul mulţumeşte pe acestă cale tuturor studenţilor şi colegilor pentru sugestiile pe
care le-au adus pe tot parcursul redactării acestei lucrări (începută din anul 1994). De asemena
doresc să îi mulţumesc d-lui prof. dr. ing. Nicolae ILIESCU, şeful Catedrei de Rezistenţa
materialelor din cadrul Universităţii POLITEHNICA Bucureşti şi d-lui Conf. dr. ing. Anton
HADAR de la aceeaşi Catedră, pentru observaţiile făcute şi răbdarea de care au dat dovadă la
parcurgerea manuscrisului.
Mulţumesc de asemenea d-lui prof. dr. ing. Mihail ATANASIU care prin bogata sa
experienţă de peste 50 de ani în învăţământul superior, a contribuit substanţial la pregătirea
mea pentru doctorat (fiindu-mi conducător de doctorat din 1996) şi la formarea mea ca şi
cadru didactic. Sugestiile şi remarcile D-sale în ceea ce prveşte calitatea actului de învăţământ
şi rigoarea ştiinţifică a oricărui curs sau articol publicat, au contribuit deplin la apariţia sub
această formă a prezentei lucrări.
De asemenea doresc să mulţumesc călduros sponsorilor care au contribuit la apariţia
acestei prime ediţii şi pe care îi asigur de recunoştinţa beneficiarilor acestei lucrări.
Târgovişte Autorul

7
CAPITOLUL IINTRODUCERE
1.1. Obiectul disciplinei Rezistenţa materialelorMecanica este disciplina tehnică generală care s-a impus ca ramură a stiinţei
odată cu enunţarea celor trei principii de către Isaac Newton, principii care definescechilibrul respectiv mişcarea corpurilor sub acţiunea forţelor exterioare exercitateasupra lor.
Mecanica clasică este o ramură a mecanicii ce studiază echilibrul respectivmişcarea sistemelor mecanice macroscopice (sisteme discrete rigide sau deformabilede puncte materiale şi sisteme continue rigide - continuum material) pentru caremişcarea se efectuează cu viteze neglijabile în raport cu viteza luminii.
Mecanica fluidelor este o ramură a mecanicii care studiază echilibrul respectivmişcarea sistemelor materiale continue deformabile de tipul fluidelor - incompresibile(hidrostatica şi hidrodinamica) sau de tipul gazelor - compresibile (aerostatica şiaerorodinamica).
Mecanica cerească este o ramură a astronomiei care studiază mişcareacorpurilor cereşti sub acţiunea forţei de atracţie universală.
Mecanica relativistă studiază mişcarea sistemelor de particule elementare dinstructura materiei care se efectuează cu viteze comparative cu viteza luminii şiredefineşte noţiunile de spaţiu, timp şi masă (care formează o unitate indisolubilă şisunt interdependente): spaţiul nu mai este omogen şi izotrop, timpul nu mai esteomogen, masa este variabilă, depinzând de viteza cu care se mişcă particula.
Mecanica cuantică studiază mişcarea particulelor elementare din structuramateriei (electroni, mezoni, nucleoni) ţinând seama atât de proprietăţile lor materialecât şi de cele de undă.
Începând cu revoluţia tehnică din secolul XIX din Mecanica clasică s-audesprins diferite ramuri tehnice cu preocupări de sine stătătoare şi cu un pronunţatcaracter aplicativ, aceste discipline fiind cunoscute sub denumirea generală deMecanică tehnică:1. Statica construcţiilor este disciplina care se ocupă cu studiul echilibrului
elementelor de construcţii civile static determinate şi mai ales studiul sistemelorstatic nedeterminate situate pe medii rigide sau elastice;
2. Rezistenţa materialelor este o disciplină tehnică generală care se ocupă cu studiulechilibrului elastic al tensiunilor din interiorul unui corp solicitat de un sistem desarcini exterioare şi se bazează pe ipoteza corpului deformabil care ţine seama deproprietăţile reale de elasticitate sau plasticitate ale corpurilor.

8
Din această disciplină s-au desprins apoi noi ramuri cum sunt:3. Teoria elasticităţii şi Teoria plasticităţii ce studiază starea generală de tensiuni şi
deformaţii care se produce în interiorul unui corp datorită acţiunii unui sistem desarcini exterioare sau a unor câmpuri termice, care se bazează pe ipotezacomportării liniar elastice respectiv neliniar plastică a materialului;
4. Teoria stabilităţii elastice studiază echilibrul la limită al corpurilor elastice supuseanumitor sarcini exterioare, condiţiile în care aceste corpuri îşi pierd echilibrulelastic stabil care caracterizează în general starea de tensiuni din interiorul lor;
5. Încercările mecanice experimentale este o disciplină complementară Rezistenţeimaterialelor, care se ocupă cu determinarea experimentală a caracteristicilorfizico-mecanice ale materialelor precum şi cu studiul experimental al stării detensiuni şi deformaţii în diferite elemente de construcţii;
6. Experimentul numeric este o disciplină apărută recent în practica inginerească carecare se ocupă cu determinarea experimental-numerică a stării de tensiuni şideformaţii pe un model virtual, utilizând programe de analiză cu elemente finitesau programe de analiză cu elemente de frontieră, valori validate de rezultateleanalitice sau experimentale cunoscute (pachetul de analiză cu elemente finiteANSIS 5.7 este validat de cca. 7000 de rezultate analitice sau experimentale).Experimentul numeric s-a dezvoltat independent pe baza următoarelor metode :a. Metoda diferenţelor finite care utilizează un model matematic diferenţial al
fenomenului care este transpus într-o formă compatibilă cu modul de operareal calculatorului; această metodă se bazează pe aproximarea localăpunctiformă a variabilei de câmp, precum şi a derivartelor ei cu ajutorul uneireţele rectangulare din domeniul studiat.
b. Metoda elementelor finite utilizează un model matematic integral alfenomenului studiat, model care se obţine cu ajutorul metodelor variaţionale.Spre deosebire de metoda diferenţelor finite, se aproximează variabila decâmp cu ajutorul unor funcţii de aproximare pe subdomenii elementare aledomeniului studiat numite elemente finite. De exemplu teorema destaţionaritate a energiei potenţiale elastice a unui corp este o astfel de formăvariaţională (integrală) utilizeazată în studiul stării de tensiuni şi deformaţiiîntr-un corp elastic.
c. Metoda elementelor de frontieră utilizează de asemenea un model matematicintegral al fenomenului studiat. Această metodă a apărut ca o alternativă ametodei elementelor finite în cazul unor probleme de frontieră cum ar fi deexemplu: probleme cu gradienţi foarte mari pe frontiera domeniului, cudomenii infinite, cu discontinuităţi şi concentratori de tensiuni, etc. Deexemplu teorema reciprocităţii lucrului mecanic (BETTI) este o formăvariaţională (integrală) pe frontiera domeniului..
Alte discipline din Mecanica tehnică sunt: Teoria profilelor cu pereţi subţiri, Teoriaplăcilor plane şi curbe, Metoda stărilor limită, Fotoelasticitatea, Tensometria,Stabilitatea echilibrului elastic al plăcilor, Similitudinea sistemelor elastice, Fluajul.

9
1.2. Problemele Rezistenţei materialelorÎn general în problemele de Rezistenţa materialelor se determină sau verifică
valorile anumitor mărimi în funcţie de altele pe baza unor relaţii matematicespecifice. Aceste mărimi pot fi grupate în trei clase:1. mărimi ce caracterizează geometria piesei (forma şi dimensiunile piesei sau formaşi mărimea diferitelor secţiuni);
2. mărimi ce caracterizează configuraţia şi intensitatea sarcinilor exterioare (tipul,valoarea şi modul de aplicare a sarcinilor exterioare);
3. mărimi ce caracterizează proprietăţile fizico-mecanice ale materialului (limita deelasicitate, de curgere, rezistenţa la rupere, etc.) şi siguranţa în funcţionare a piesei(coeficienul de siguranţă, rezistenţa admisibilă, etc).
În funcţie de mărimile necunoscute, problemele Rezistenţei materialelor pot fiîn general de trei categorii:1. Probleme de dimensionare atunci când se cunosc sarcinile din exploatare,
caracteristicile fizico-mecanice ale materialului, elemente legate de siguranţa înfuncţionare impusă piesei şi se doreşte proiectarea formei optime, determinareadimensiunilor piesei pentru ca acestea să îndeplinească:(a) condiţiile de rezistenţă, rigiditate şi stabilitate impuse piesei în timpul
funcţionării în ansamblul din care fac parte;(b) condiţiile de economicitate (costuri minime legate de de material);(c) condiţiile de rentabilitate (costuri minime legate de tehnologia de fabricaţie);
2. Probleme de verificare atunci când se cunosc forma şi dimensiunile piesei,configuraţia şi mărimea sarcinilor, caracteristicile mecanice ale materialului şi sedoreşte să se verifice dacă sunt respectate condiţiile de rezistenţă, rigiditate saustabilitate pentru un anumit coeficient de siguranţă impus;
3. Probleme de calcul a sarcinii capabile când se cunosc forma şi dimensiunilepiesei, configuraţia de încărcare, caracteristicile mecanice ale materialului şi sedetermină sarcina capabilă (sarcina maximă) ce o poate suporta piesa pentru unanumit coeficient de siguranţă impus piesei.
1.3. Metode de studiu, modele de calcul şi ipoteze de lucrufolosite în Rezistenţa materialelorMetodele de studiu clasice şi moderne utilizate pentru rezolvarea aplicaţiilor
tehnice de Rezistenţa materialelor sunt:1. Metode teoretice bazate pe construcţii logice, algoritmi de calcul sau programe
speciale care utilizează un anumit aparat matematic care furnizează rezultateteoretice acceptabile pentru un calcul ingineresc;

10
2. Metode experimentale pe modelul real sau pe o machetă, având ca scopverificarea rezultatelor obţinute folosind metodele teoretice, în scopul validăriialgoritmilor de calcul sau programelor de calcul folosite.
3. Metode experimental-numerice pe modelul virtual se bazează pe simulareafenomenului fizic pe un model analitic, creat pa baza modelului matematic cecaracterizează fenomenul (ecuaţiile diferenţiale, condiţiile la limita domeniului şicondiţii iniţiale în cazul fenomenelor ce se desfăşoară în timp).
Calculul ingineresc s-a dezvoltat în mod sistematic pe baza experimentului pemodelul real, care a fost absolut necesar pentru confirmarea ipotezelor de lucru şi amodelului de calcul adoptat. Limitele experimentului pe modelul real s-au restrâns totmai mult odată cu dezvoltarea sistemelor tehnologice, a imposibilităţii reproducerii lascară de laborator a unor instalaţii şi procese noi care au apărut.
Aceste schimbări au condus la apariţia experimentului numeric. Dezvoltareafoarte rapidă a tehnicii hardware (în special apariţia calculatorului personal şi astaţiilor grafice) şi software (apariţia programelor profesionale de analiză şi simulare)a dus la dezvoltarea într-un ritm extraordinar a experimentului numeric. Modelulmatematic ce caracterizează un fenomen necesită transcrierea lui sub o formăcompatibilă cu modul de operare al calculatorului, acest lucru realizându-se cuajutorul programe specializate cu elemente finite având la bază un aparat matematicriguros.
La rezolvarea unei probleme de Rezistenţa materialelor o influenţă hotărâtoareasupra rezultatului îl are precizia calculului numeric, întrucât rezultatele obţinutetrebuie să fie cât mai apropiate de cele reale (determinate experimental), în RezistenţaMaterialelor se admit erori de calcul în limitele de %,52± .
Modelul de calcul folosit în calculele analitice din Rezistenţa materialelor esteo reprezentare simplificată (schematizată) a piesei şi configuraţiei de încărcare cusarcini exterioare conţinând informaţiile esenţiale care definesc: geometria corpului,modul de constrângere (legăturile cu mediul fix şi legăturile cu celelalte elemente aleansamblului din care facre parte) şi configuraţia de încărcare. Modelul de calculutilizează diferite ipoteze simplificatoare care scot în evidenţă şi reţin aspecteleesenţiale ale geometriei corpului, legăturilor şi configuraţiei de încărcare.
După mărimea relativă a dimensiunilor principale ale geometriei corpului, sefolosesc trei tipuri de modele :1. Modelul de tip bară (fig. 1.1.a) se utilizează atunci când una dintre dimensiunile
corpului este mult mai mare în raport cu celelalte două. Elementele specifice aleacestui tip de model sunt: (a) axa longitudinală a barei şi (b) secţiunea normală(pe axa longitudinală); în funcţie de forma axei longitudinale se deosebesc: baredrepte, curbe, cotite. Exemple de piese ce utilizează modelul de tip bară: axul depiston, biela, tija unei supape, şina de cale ferată, bara de filetare a strungului, axulcu came al unui motor, arcul elicoidal, arborele unui reductor, arborele cotit alunui motor, etc. Un caz particular al modelului de tip bară este firul flexibil carepreia numai forţe de întindere.

11
2. Modelul de tip placă (fig. 1.1.b) se utilizează atunci când una dintre dimensiunilecorpului este mult mai mică în raport cu celelalte două; elementele specificeprincipale ale acestui tip de model sunt: (a) suprafaţa mediană a plăcii (forma şimărime) şi (b) grosimea plăcii. În funcţie de forma suprafaţei mediane sedeosebesc: plăci plane (circulare, dreptunghiulare, etc.), plăci curbe (de revoluţie,riglate, etc.). În funcţie de grosime: plăci subţiri, plăci groase, plăci de grosimeneuniformă, etc. Plăcile foarte subţiri se mai numesc membrane şi suportă numaieforturi de întindere. Exemple: discul unei supape, planşaiba unui strung, capulunui piston, o foaie de geam, planşeul unei camere, capacul unui rezervor,cilindrul unui motor, rezervoarele cilindrice, sferice, conice , etc.
3. Modelul de tip bloc regulat (fig. 1.1.c) se utilizează atunci când cele treidimensiuni ale corpului sunt cam de acelaşi ordin de mărime; se pot modela pieseavând o formă geometrică simplă: sferă, cilindru, con, prismă, cub, etc. Exemple:bile şi role de rulmenţi, matriţe simple, roţi dinţate, arbori scurţi, batiuri de maşini,fundaţii, blocuri de beton, etc.
Rezolvarea clasică a multor aplicaţii tehnice se bazează deci pe creerea unormodele de lucru şi introducerea unor ipoteze simplificatoare de calcul, ipotezerezonabile care simplifică modelul real şi ilustrează cât mai fidel comportarea globalăa sistemului real.
În Rezistenţa materialelor se utilizează în mod curent următoarele ipotezesimplificatoare numite şi ipoteze de bază ale Rezistenţei materialelor:1. ipoteza mediului continuu, omogen şi izotrop;2. ipoteza deformaţiilor mici în raport cu dimensiunile corpului supus acţiunii unor
sarcini exterioare;3. ipoteza secţiunii plane a unei bare supusă la încovoiere (ipoteza lui BERNOULLI)şi a liniei drepte perpendiculare la suprafaţa mediană a plăcii supuse la încovoiere(ipoteza lui KIRKHHOFF);
4. ipoteza privind ponderile relative ale tensiunilor sau a unor tipuri de solicităriîntr-un corp supus acţiunii unor sarcini exterioare: unele dintre tensiuni pot fineglijate în raport cu altele (de exemplu într-o bară dreaptă tensiunile tangenţialeproduse de eforturile tăietoare se neglijează în raport cu cele normale produse de
b.a. c.Fig.1.1

12
eforturile încovoietoare, sau într-o bară curbă tensiunile normale produse deeforturile axiale se neglijează în raport cu cele normale produse de momenteleîncovoietoare; într-o placă tensiunile normale după o direcţie perpendiculară lasuprafaţa plăcii se neglijează în raport cu cele radiale sau circumferenţiale, etc.)
5. ipoteza privind legea distribuţiei tensiunilor într-o secţiune oarecare a unei bare:! distribuţia uniformă a tensiunilor normale pe suprafaţa transversală în cazul
unei bare solicitată la eforturi axiale,! distribuţia liniară a tensiunilor în cazul unei bare solicitată la încovoiere pură
(NAVIER),! distribuţia liniară a tensiunilor tangenţiale în cazul unei bare de secţiune
circulară solicitată la răsucire,! distribuţia uniformă a tensiunilor tangenţiale într-o secţiune longitudinală în
cazul unei bare solicitată la încovoiere simplă (JURAVSKI);6. ipoteza privind valabilitatea legii lui HOOKE sau a unei relaţii liniare dintre
tensiuni şi deformaţii (în cazul solicitărilor în domeniul elasto-plastic a unormateriale cum ar fi cele elasto-plastice, rigido-plastice, ideal elsto-plastice, idealplastice, etc. se folosesc anumite legi dintre tensiuni şi deformaţii).
7. principiul suprapunerii efectelor sau principiul independenţei acţiunii forţelor,care se bazează pe ipoteza privind valabilitatea legii lui HOOKE;
8. ipoteza lui SAINT VENANT privind efectul unei sarcini distribuite pe o suprafaţăcare este acelaşi cu efectul unei sarcini concentrate echivalente, într-o zonă acorpului îndepărtată de zona de acţiune a sarcinii distribuite;
1.4. Clasificarea sarcinilor exterioare
În timpul funcţionării, orice piesă de maşină sau element de construcţie estesupus unor sarcini exterioare, care în funcţie de efectul pe care îl produc asupra luipot fi de următoarele două tipuri: forţe sau cupluri de forţe. Sarcinile exterioarereprezintă măsura acţiunilor altor corpuri sau câmpuri exterioare asupra pieseistudiate. Clasificarea sarcinilor exterioare se face după următoarele criterii:1. după modul de aplicare: sarcini active (aplicate direct) şi sarcini pasive (aplicate
indirect) prin intermediul elementelor de legătură, numite şi forţe de legăură saureacţiuni;
2. după modul de distribuţie: sarcini concentrate, sarcini distribuite pe o zonă sau peo suprafaţă a corpului, sarcini volumice distribuite în toată masa corpului (deexemplu greutatea, forţa electromagnetică);
3. după cauza producerii: sarcini datorate interacţiunii mecanice (de contactmecanic) şi sarcini datorate unor câmpuri exterioare (gravitaţionale, electrice,electromagnetice, etc.);
4. după variaţia în timp a poziţiei şi direcţiei lor: sarcini fixe şi sarcini mobile;5. după variaţia în timp a intensităţii lor: sarcini statice şi sarcini dinamice;

13
6. după efectul produs în piesa solicitată: forţe (care produc solicitări de întidere,compresiune şi forfecare) şi cupluri de forţe (care produc solicitări de încovoiereşi de răsucire);
7. după natura lor: sarcini fundamentale (sarcini permanente, utile, suplimentarecontrolate) şi sarcini accidentale sau întâmplătoare (necontrolate).
1.5. Forţe elementare interioare şi eforturiSub acţiunea sarcinilor exterioare iau naştere în interiorul piesei forţele
elemetare interioare respectiv tensiunile (definite ca raportul dntre forţele elementareşi aria elementară corespunzătoare) caracterizate printr-o anumită distribuţie caredepinde de mai mulţi factori cum ar fi: mărimea şi modul de aplicare a sarcinilorexterioare, geometria corpului, direcţia de măsurare, proprietăţile mecanice alematerialului, etc.
Determinarea distribuţiei şi valorilor extreme ale tensiunilor în interiorul unuicorp este una dintre problemele cele mai importante ale Rezistenţei materialelor.După stabilirea zonelor în care se produc şi valorilor acestor tensiuni, pe baza uneiTeorii de rezistenţă se determină tensiunea echivalentă şi se determină coeficientulde siguranţă în raport cu tensiunea admisibilă a materialului.
Forţele interioare sau eforturile din secţiunea unei bare se pot pune în evidenţăcu ajutorul metodei secţiunilor (Ritter) de la calculul grinzilor cu zăbrele. Secţionândcu un plan imaginar o grindă cu zăbrele se introduc în secţiunile barelor respectiveforţele interioare sau eforturile N, care împreună cu forţele exterioare direct aplicateFi şi cu forţele de legătură H,V, N corespunzătoare fiecărei părţi trebuie să se afle înechilibru (vezi fig1.2).
Fig.1.3
z
y
x
P
Fig 1.4
y
x
z
y
z
C
dA
C
MM
dF
Fig. 1.2
H 11
V
812
10
9
αF1
N86
N87
N97
6 5
2
N68
N78
N797 4
3
1
F2 N
F4F3
Forţe directaplicate
Forţe delegătură
Forţe delegătură
Forţe directaplicate
Forţe interioare(eforturi)

14
Se consideră o bară dreaptă având axa longitudinală Ox (fig.1.3) încărcată cuun sistem de sarcini exterioare (direct aplicate şi de legătură) care se secţionează cuun plan imaginar P transversal şi perpendicular pe axă, obţinându-se două părţi.Pentru a se păstra echilibrul celor două părţi este necesar să se introducă pe fiecarefaţă a secţiunii forţele elementare interioare (care sunt de fapt forţele interatomice alereţelei cristaline secţionate de planul imaginar) egale şi opuse pe cele două feţe alesecţiunii, conform principiului acţiunii şi reacţiunii din Mecanica clasică (fig.1.4).
Dacă în jurul unui punct M se consideră o arie elementară dA (elementul dearie dA poate fi o faţă a unui element de volum dV) atunci raportul dintre forţaelementară interioară dF şi aria elementară dA se numeşte tensiune:
dAdFp = (1.1)
Dacă se reduc aceste forţe elementare dF care acţionează pe toată suprafaţa încentrul de greutate al secţiunii barei considerate se obţine:! pentru faţa din stânga a secţiunii (faţa pozitivă) un torsor (τint) format din
rezultanta ( intR ) şi cuplul rezultant ( intM ) ;
! pentru faţa din dreapta a secţiunii (faţa negativă) un torsor (-τint) format dinrezultanta (- intR ) şi un cuplu rezultant (- intM ) (fig.1.5).
Reducând şi sarcinile exterioare în acelaşi punct C, se obţine:
! pentru partea din stânga torsorul forţelor exterioare ( extstgτ ) format din rezultanta
extstgR şi cuplul rezultant ext
stgM ;
! pentru partea din dreapta torsorul forţelor exterioare ( extdrτ ) format din rezultanta
extdrR şi cuplul rezultant ext
drM (fig.1.5).
Ecuaţiile de echilibru al forţelor pentru fiecare dintre cele două părţi se scriu:
a. pentru partea din stânga: extstg
intextstg
int τ=τ−⇒=τ+τ 0 (1.2)
sau : ;MM;RR intextstg
intextstg 00 =+=+
z
x
z
C
x
yy
intR
intM
Fig 1.5
intM−
intR−
Faţa pozitivă Faţa negativăstgiF
driF
C
extstgM
extdrM
extdrR
extstgR

15
;MM;RR extstg
intextstg
int =−=−
b. pentru partea din dreapta: extdr
intextdr
int τ=τ⇒=τ+τ− 0
sau ;MM;RR intextdr
intextdr 00 =−=− (1.3)
extdr
intextdr
int MM;RR ==
Concluzii:• elementele torsorului forţelor interioare corespunzătoare feţei din dreapta (-τint)
sunt egale cu elementele torsorului forţelor exterioare ce acţionează asupra părţiidin stânga ( ext
stgτ );
• elementele torsorului forţelor interioare corespunzătoare feţei din stânga (τint) suntegale cu elementele torsorului forţelor exterioare ce acţionează asupra părţii dindreapta ( ext
drτ );
Dacă se descompun elementele torsorului forţelor interioare de pe faţa dinstânga (sau de pe faţa din dreapta) după cele trei direcţii ale triedrului triortogonaldrept Cxyz (fig. 1.6) se obţin şase componente notate cu: Nx, Ty, Tz, Mtx, Miy, Miznumite eforturi secţionale (legate de secţiunea barei).
Pentru elementele torsorului forţelor interioare sunt valabile următoarele relaţiivectoriale:
zyxint TTNR ++= (1.5)
txiziyint MMMM ++= (1.6)
În funcţie de efectul pe care îl produc în bara dreaptă, eforturile secţionale auurmătoarele denumiri:
• Nx eforturi axiale , produc solicitarea de întindere sau compresiune;• Ty , Tz eforturi tăietoare , produc solicitarea de forfecare;• Miy , Miz eforturi încovoietoare , produc solicitarea de încovoiere;• Mtx eforturi de răsucire , produc solicitarea de răsucire sau torsiune.
z
NxTy
Tz
C
xyintR
z
Miy
Miz
Mt
C
xy
(a) (b)
intM
Fig. 1.6

16
Variaţia eforturilor pe lungimea barei se reprezintă grafic sub formadiagramelor de eforturi, pentru trasarea cărora se ţine seama de următoareleconvenţii de semne (conform fig.1.7):• eforturile de pe faţa din stânga secţiunii (faţa pozitivă) sunt pozitive dacă au
acelaşi sens cu axa respectivă şi negative dacă dacă au sens invers;• eforturile de pe faţa din dreapta secţiunii (faţa negativă) sunt pozitive dacă au sens
invers axei respective şi negative dacă au acelaşi sens;• un efort axial Nx pozitiv într-o secţiune produce solicitarea de întindere iar un
efort axial negativ produce solicitarea de compresiune;• eforturile Miy şi Miz pozitive produc alungirea fibrei inferioare, respectiv
comprimarea fibrei superioare dacă privim în sens invers axelor Oy respectiv Oz;• efortul Tz este pozitiv dacă produce rotirea în sens orar a celor două secţiuni
privind în sens invers axei Oy iar efortul Ty este pozitiv dacă produce rotirea însens antiorar a celor două secţiuni privind în sens invers axei Oz ;
Pentru un sistem de forţe coplanare (din planul xOz , fig. 1.8) regula semnelorde mai sus aplicată eforturilor N, Miz şi Tz pe cele două feţe ale secţiunii barei (carecorespund selor două sensuri de parcurgere) este prezentată în fig. 1.8;
y
MtxMiy
Nx
Miz
Tz
Ty
x
zb.
Fig 1.7
faţanegativă
y Miy
Nx
Miz
Mtx
Tz Ty
x
z
faţapozitivă
a.
Fig 1.8
faţa negativă
Miy
Nx
Tz
x
z
Miy
Nx
Tz
x
z
Regula corespundeensului de parcurgerede la dreapta- stânga
faţa pozitivă
Regula corespundeensului de parcurgerede la stânga-dreapta

17
1.6. Tensiuni, deformaţii şi deplasăriSecţionând o piesă cu un plan imaginar, asupra ariei elementare ∆A din
vecinătatea punctului M, va acţiona forţa interioară elementară F∆ (fig.1.9). Sedefineşte tensiunea ca valoarea la limită a raportului dintre forţa interioară elementară
F∆ şi aria elementară ∆A :
dAFd
AFlimp
A=
∆∆=
→∆ 0(1.7)
Mărimea tensiunii depinde atât de mărimea şidirecţia forţei Fd cât şi de orientarea normaleisuprafaţei considerate dA (fig.1.9), deci tensiunea peste o mărime tensorială .
Tensiunea p se descompune în:
! componenta σ după normala ui la suprafaţa elementară dA numită tensiunenormală ;
! componenta τi după o direcţie vi cuprinsă în planul suprafeţei elementare dA,numită tensiune tangenţială. Această componentă se descompune la rândul eidupă cele două direcţii uj şi uk din planul secţiunii obţinându-se tensiunile τji
respectiv τki (primul indice indică direcţia, al doilea indică normala la suprafaţă).Între aceste componente se poate scrie relaţia vectorială:
kijiiiip τ+τ+σ=τ+σ= (1.8)
şi relaţia scalară:222222
kijiiiip τ+τ+σ=τ+σ= (1.9)
Unitatea de măsură în Sistemul Internaţional pentru tensiuni (σ ,τ ) este
Pascalul: 1Pa= 2
1mN şi multiplul ei 1MPa= 22
6 110mm
NmN =
Dacă se consideră trei planeperpendiculare ale unui sistem triortogonaldrept Oxyz de versori i, j şi k , matricea celornouă tensiuni normale şi tangenţiale definite înraport cu aceste plane, se numeşte tensorultensiunilor şi defineşte complet starea detensiuni în jurul punctului considerat:
στττστττσ
=σ
zzyzx
yzyyx
xzxyx
T (1.10)
ui
vi
τji
τkiτi
pσi
uj
uk
M
∆A
Fig. 1.9
O
y
z Fig. 1.10
x
σx
τzx
τyx
τzy
σyτxy
τxyσy
τzy
σz
τyz
τxz
τzx
τzx
σx
τyz
σz
τxz

18
Sub acţiunea sarcinilor exterioare corpurile se deformează, adică îşi schimbăforma şi dimensiunile iniţiale. Deformaţiile sunt de două feluri: liniare şi unghiulare.
Pentru a pune în evidenţă deformaţiile liniare se consideră o piesă cilindrică delungime L0 şi diametru d0, solicitată la întindere de o forţă axială F (fig. 1.11.a). Barasuferă o deformaţie liniară longitudinală numită lungire longitudinală ( ∆ L=L1 -L0) şio deformaţie liniară transversală ( ∆ d0=d1 - d0) numită contracţie transversală. Pentru deformaţiile liniare se utilizează însă următoarele mărimi adimensionale:
! deformaţia specifică longitudinală sau alungirea: 0LL
l
∆=ε (1.10)
! deformaţia specifică transversală : 0dd
t
∆=ε (1.11)
Între cele două mărimi există relaţia de legătură: lt ε⋅ν−=ε (1.12)
unde ν este coeficientul contracţiei transversale (sau coeficientul lui Poisson).
Pentru a pune în evidenţă deformaţiile unghiulare se consideră o piesăcilindrică de diametru d solicitată solicitată la răsucire de un moment Mtx (fig. 1.11.b)Dacă se studiază deformaţia un element paralelipipedic drept din vecinătateaconturului (dV) se observă că suferă deformaţii unghiulare: unghiurile iniţiale de π/2între muchiile concurente în punctul M se modifică cu valoarea γ (în radiani) care senumeşte deformaţie unghiulară specifică sau lunecare specifică ( γ > 0 dacă unghiulscade).
În cazul general, starea de deformaţii din jurul unui punct M, raportată la unsistem de axe triortogonal drept Mxyz (fig. 1.12) se exprimă în funcţie de lungirilespecifice: εx, εy, εz corespunzătoare celor trei direcţii şi lunecările specifice: γxy, γyz,γzx, corespunzătoare fiecărui plan, care sunt elementele unei matrici simetrice Tε,numită tensorul deformaţiilor specifice:
εγγ
γεγ
γγε
=ε
zzyzx
yzyyx
xzxyx
T
21
21
21
21
21
21
(1.13)
b.
Mt
dV
Mt
dV
γFig. 1.11
d0-∆dd0
F F L0
a.
L0+∆L

19
Deplasarea reprezintă drumulparcurs de un punct M în raport cu unsistem de referinţă fix Mx y z, şi seexprimă prin deplasările u, v, w, dupădirecţia axelor Mx, My, respectiv Mz(fig. 1. 12). În aceeaşi figură sunt reprezentate şisemnificaţiile deformaţiilor specifice: εx,εy, εz şi lunecărilor specifice: γxy, γyz, γzx.
1.7. Curba caracteristica a materialuluiÎncercarea la tracţiune conform STAS SR EN 10002-1/1995 (înlocuieşte STAS
200-85) se face în scopul determinării următoarelor caracteristici mecanice-alungirea procentuală la rupere (A)-limita de curgere convenţională (Rp)-limita de extensie convenţională (Rt)-limita de curgere remanentă (Rr)Încercarea la tracţiune constă în aplicarea progresivă a unei forţe de întindere F
pe direcţie longitudinală asupra unei piese cilindrice de o anumită formă numităepruvetă până la ruperea ei. Deformaţiile longitudinale ∆L ale piesei se înregistreazăgrafic pe o diagramă în funcţie de forţa de tracţiune F obţinânduse o diagramă ca înfig.13.a pentru materiale liniare (oţeluri carbon, aliate, etc.), sau ca în fig. 13.b. pentrumateriale neliniare (bronzuri, alame, aliaje neferoase, etc.) .
Semnificaţia notaţiilor de pe curbele din fig. 13, conform STAS SR EN 10002-1/1995 este următoarea:
FF
FmaxFmax FuFeH FuFtFeL Fp
∆L 0,2%L0 0,5%L0
Lungirea la rupere ∆LLungirea la rupere
b.a.
CC
DAB D
AB
Fig. 1.13
M
dy(1+εy)
dz(1+εz)
π/2-γxy
π/2-γyz π/2-γzx
dx(1+εx)
dxdy
x
x
dz
w
vu
y
y
z
z
Fig. 1.12
M
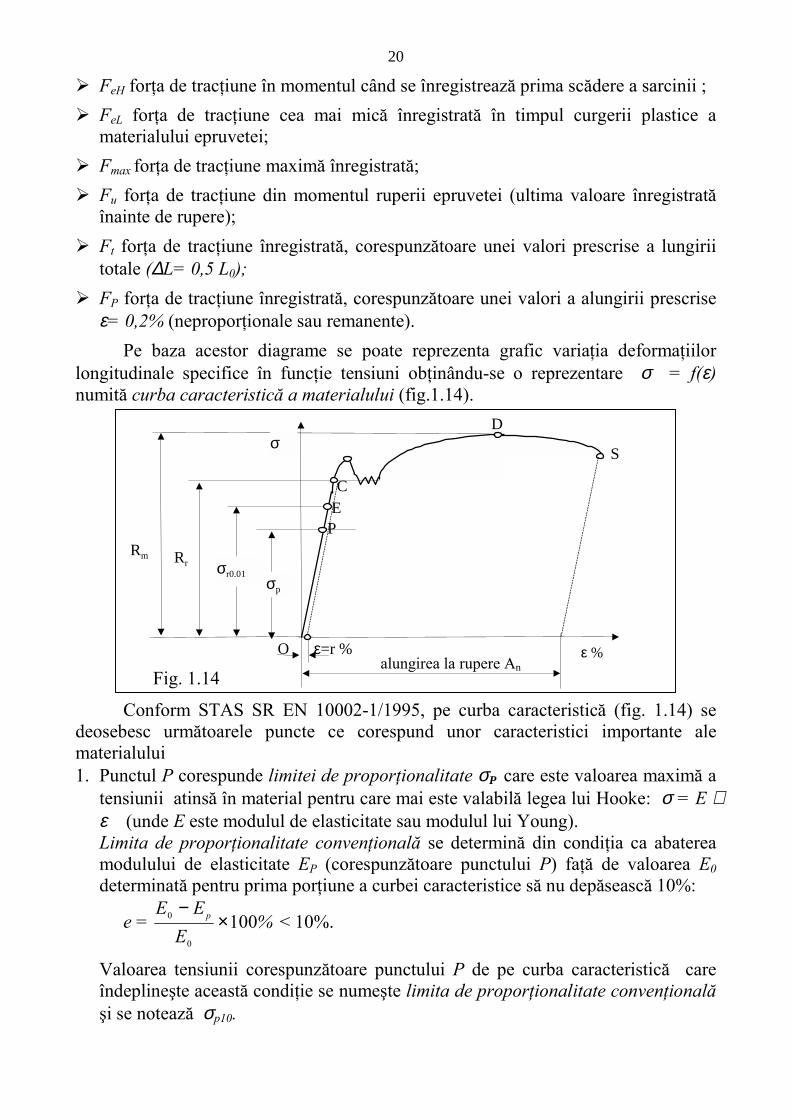
20
! FeH forţa de tracţiune în momentul când se înregistrează prima scădere a sarcinii ;! FeL forţa de tracţiune cea mai mică înregistrată în timpul curgerii plastice a
materialului epruvetei;! Fmax forţa de tracţiune maximă înregistrată;! Fu forţa de tracţiune din momentul ruperii epruvetei (ultima valoare înregistrată
înainte de rupere);! Ft forţa de tracţiune înregistrată, corespunzătoare unei valori prescrise a lungirii
totale (∆L= 0,5 L0);! FP forţa de tracţiune înregistrată, corespunzătoare unei valori a alungirii prescrise
ε= 0,2% (neproporţionale sau remanente).Pe baza acestor diagrame se poate reprezenta grafic variaţia deformaţiilor
longitudinale specifice în funcţie tensiuni obţinându-se o reprezentare σ = f(ε)numită curba caracteristică a materialului (fig.1.14).
Conform STAS SR EN 10002-1/1995, pe curba caracteristică (fig. 1.14) sedeosebesc următoarele puncte ce corespund unor caracteristici importante alematerialului1. Punctul P corespunde limitei de proporţionalitate σP care este valoarea maximă a
tensiunii atinsă în material pentru care mai este valabilă legea lui Hooke: σ = E ⋅ε (unde E este modulul de elasticitate sau modulul lui Young).Limita de proporţionalitate convenţională se determină din condiţia ca abatereamodulului de elasticitate EP (corespunzătoare punctului P) faţă de valoarea E0determinată pentru prima porţiune a curbei caracteristice să nu depăsească 10%:
e = %E
EE p 1000
0 ×−
< 10%.
Valoarea tensiunii corespunzătoare punctului P de pe curba caracteristică careîndeplineşte această condiţie se numeşte limita de proporţionalitate convenţionalăşi se notează σp10.
C
D
S
O
EP
RrRm
alungirea la rupere Anε=r % ε %
Fig. 1.14
σp
σr0.01
σ

21
2. Punctul E corespunde limitei de elasticitate σe sau valoarea tensiunii atinsă înmaterial până la care comportarea materialului este perfect elastică (după anulareaforţei de întindere epruveta revine exact la forma iniţială). Experienţele au arătatcă nu există materiale perfect elastice şi epruveta suferă o deformaţie remanentă.Se defineşte limita de elasticitate tehnică σe0,01 corespunzătoare unei valoriconvenţionale maxime a deformaţiei specifice remanente εr = 0,01% .
3. Punctul C corespunde limitei de curgere aparentă Rc sau valoarea tensiunii dinepruvetă pentru care lungirea epruvetei creşte când sarcina F rămâne practicconstantă. După atingerea limitei de curgere aparentă Rc , curba caracteristică areun traseu orizontal, uneori sinuos, numit palier de curgere. La unele materiale,palierul de curgere nu există, ceea ce face ca limita de curgere aparentă să nupoată fi stabilită.Se defineşte limita de curgere remanentă Rr0,2 ca valoarea tensiunii pentru care ladescărcarea epruvetei se produce o alungire remanentă εr = 0,2% ;
4. Punctul D corespunde rezistenţei la rupere Rm sau valoarea tensiunii din epruvetăcorespunzătoare valorii maxime a sarcinii şi se determină cu relaţia:
Rm = 0S/Fmax
unde: Fmax - este forţa maximă înregistrată în timpul încercării;S0 - aria secţiunii iniţiale a epruvetei.
5. Punctul S corespunde producerii ruperii pentru care se definesc:! Alungirea la rupere An este dată de raportul procentual dintre creşterea
lungimii epruvetei (măsurată după rupere) şi lungimea iniţială. Alungirea larupere se notează cu An şi se calculează deci cu relaţia:
An = [ ]%L
LLu 1000
0 ⋅−
unde Lo este lungimea iniţială a epruvetei, Lu - lungimea ultimă dintre repere, măsurată după rupere.
Indicele n este un factor dimensoinal pentru epruvete de secţiune circulară este:00 d/Ln = , unde d0 este diametrul secţiunii iniţiale a epruvetei. Determinarea
alungirii la rupere se face în general, pe epruvete având n = 5 sau n = 10.! Gâtuirea la rupere Z este dată de raportul procentual între variaţia ariei
secţiunii transversale a epruvetei ∆S=So- Su şi aria suprafaţei secţiunii iniţialeşi se calculează cu relaţia:
Z = [ ]%S
SSo
uo 100⋅−
unde Su este aria secţiunii transversale minime a epruvetei după încercareS0 este aria secţiunii iniţiale a epruvetei
22
1.7. Coeficienţi de siguranţă şi rezistenţe admisibilePentru funcţionarea corespunzătoare a unei piese în ansamblul din care face
parte se impun în general una sau mai multe din următoarele condiţii :a) condiţii de rezistenţă: piesa corespunde rolului funcţional din punct de vedere al
rezistenţei atunci când tensiunea echivalentă maximă nu depăşeşte o anumităvaloare stabilită convenţional numită tensiune admisibilă (σa):
σech < σa
Se cunosc cinci teorii clasice de rezistenţă şi o teorie modernă pentru calculultensiunii echivalente (vezi capitolul XV). Tensiunea admisibilă σa se determină înfuncţie de una dintre caracteristicile mecanice ale materialului (limita de curgere,rezistenţa de rupere, etc) cu ajutorul relaţiei :
r,c
r,ca c
σ=σ
cc este coeficientul de siguranţă faţă de limita de curgere pentru materiale tenace;cr - coeficientul de siguranţă faţă de limita de rupere pentru materiale fragile.Coeficientul de siguranţă c (cc,cr) ţine seama de tipul materialului, de tehnologia deobţinere a semifabricatului, tratamentele termice aplicate, de durata de utilizare, detipul sarcinilor aplicate, de regimul de funcţionare, de modelul de calcul ales, decondiţiile de lucru (temperatura, agentul de lucru, etc).
b) Condiţii de rigiditate: piesa corespunde rolului funcţional din punct de vedere aldeformaţiilor produse sub acţiunea sarcinilor exterioare, dacă acestea nu depăşescanumite limite, în caz contrar aceste deformaţii pot duce la pierderea roluluifuncţional sau la distrugerea sa.
c) Condiţii de stabilitate: piesa corespunde rolului funcţional din punct de vedere alstabilităţii echilibrului elastic sub acţiunea sarcinilor exterioare, dacă aceste sarcininu depăşesc anumite valori critice, deşi condiţiile de rezistenţă şi rigiditate suntsatisfacute; funcţionarea piesei în astfel de cazuri este compromisă sau pierdereaechilibrul stabil poate duce la distrugerea ei.

23
CAPITOLUL IIDIAGRAME DE EFORTURI ÎN BARELE DREPTERELAŢIILE DIFERENŢIALE ÎNTRE EFORTURI ŞI FORŢELE
EXTERIOARE
Se consideră modelul de tip bară solicitat de un sistem de forţe coplanarecuprinse în planul Oxz. Eforturile secţionale pe faţa negativă (partea din dreapta asecţiunii corespunzătoare sensului de parcurgere de la stânga spre dreapta) secalculează ca sumă a tuturor proiecţiilor forţelor după axele Cx, Cz respectiv amomentelor faţă de Cy, ce acţionează asupra părţii din stânga, cu respectareaconvenţiei de semne stabilite în capitolul I (fig. 2.1).
2.1 Diagrame de eforturi axialeSe consideră o bară dreaptă supusă acţiunii unor forţe axiale concentrate P şi
distribuite axial qx şi un tronson de lungime dx aflat la distanţa x de capătul din stângaal barei. Pe feţele elementului vom avea eforturile axiale (pozitive) Nx respectivNx+dNx (fig. 2.2). Variaţia eforturilor axiale Nx pe lungimea barei ca o funcţie de x:Nx=Nx(x) se reprezintă sub forma diagramei de eforturi axiale. În continuare vomnota Nx cu N.
Pentru a scrie relaţiile diferenţiale dintre eforturile axiale şi forţele exterioarevom scrie ecuaţia de echilibru a forţelor exterioare şi eforturilor din cele două feţe cedelimitează elementul considerat:
-N+qx dx+N+dN=0 (2.1)
Fig 2.1
Faţa negativăMiyNx
Tz
x
zx
Fig 2.2
Nx N+dN
x dx
qx

24
Rezultă dN=-qx dx sau xqdxdN −= (2.2)
Dacă se integrează prima relaţie (2.2) se obţine expresia eforturilor axiale înfuncţie de forţele exterioare: ∫−= dxq)x(N x (2.3)
Pe baza relaţiei (2.3) se trasează diagramele de eforturi axiale.Este evident faptul că dacă qx=0, N=constant, adică în absenţa sarcinilor
distribuite eforturile axiale sunt constante pe acea porţiune.În dreptul forţelor axiale concentrate trebuiesc determinate cele două valori ale
efortului în secţiunea respectivă: limita la stînga (Nst) respectiv la dreapta (Ndr).Exemplu:Să de traseze diagrama de eforturi axiale pentru bara dreaptă încărcată cu un
sistem format din două forţe axiale distribuite: qx1 , qx2 şi trei forţe axiale concentrate4P, P şi 2P ca în fig.2.3.
Se înlocuieşte legătura din secţiunea 0 (încastrarea) cu o forţă de legătură H0(întrucât nu există alte sarcini exterioare:T=0, Mi=0, Mt=0) şi se scrie ecuaţia deechilibru a forţelor exterioare şi de legătură pe direcţia axială (fig. 2.4):
-H0 + q1x ⋅3a + 4P – P - q2x ⋅2a + 2P=0 (2.4)De unde rezultă: H0 = 6P (2.5)
! Pe tronsonul 0-1avem:
∫ +−=−=− 1110 CxaPdxq)x(N x (2.6)
Fig 2.3
3a
4Pqx1=P/a
3aa a
P 2Pqx2=2P/a0 1 3 42
Fig 2.4
3a
4Pqx1=P/a
3aa a
P 2Pqx2=2P/a0 1 3 42
H0

25
Constanta de integrare C1 se determină din condiţia la limită a tronsonului 0-1:
x=0 ⇒ N(0)=+H0 deci C1=6P ⇒ Pax)x(N
+−=− 610 (2.7)
În secţiunea 1 vom avea efortul: N1=N0-1(3a)=3P! Pe tronsonul 1-2 avem:
∫ =−=− 221 Cdxq)x(N x (constant) (2.8)
Constanta de integrare C2 se determină din condiţia la limită a tronsonului 1-2: x=0 ⇒ N(0)=N1=3P deci C2=3P ⇒ N1-2=3P (2.9)
! Pe tronsonul 2-3 avem:
∫ =−=− 332 Cdxq)x(N x (constant) (2.10)
Constanta de integrare C3 se determină din condiţia la limită a tronsonului 2-3: x=0 ⇒ N(0) =N2dr= N2st -4P=-P deci C3=-P ⇒ N2-3=-P (2.11)
! Pe tronsonul 3-4 avem:
∫ +=−=− 4243
2 CxaPdxq)x(N x (2.12)
Constanta de integrare C4 se determină din condiţia la limită a tronsonului 3-4:
x=0 ⇒ N(0)=N3dr=N3st +P=0 deci C4=0 ⇒ Pax)x(N 2
43 =− (2.13)
În secţiunea 4 vom avea efortul: N4=N3-4(a)=2P. Se observă că efortul axialdin secţiunea de capăt este egal cu forţa exterioară ce acţionează în această secţiune(2P) şi este pozitiv, conform convenţiei de semne pentru faţa pozitivă stabilită lacapitolul I; spunem că diagrama de eforturi se închide.
Diagrama de eforturi axiale pentru exemplul considerat are forma din fig. 2.5.
Fig 2.5
3a
4Pqx1=P/a
3aa a
P 2Pqx2=2P/a0 1 3 42
6P
+
-+
6P
3P
-P
2P
26
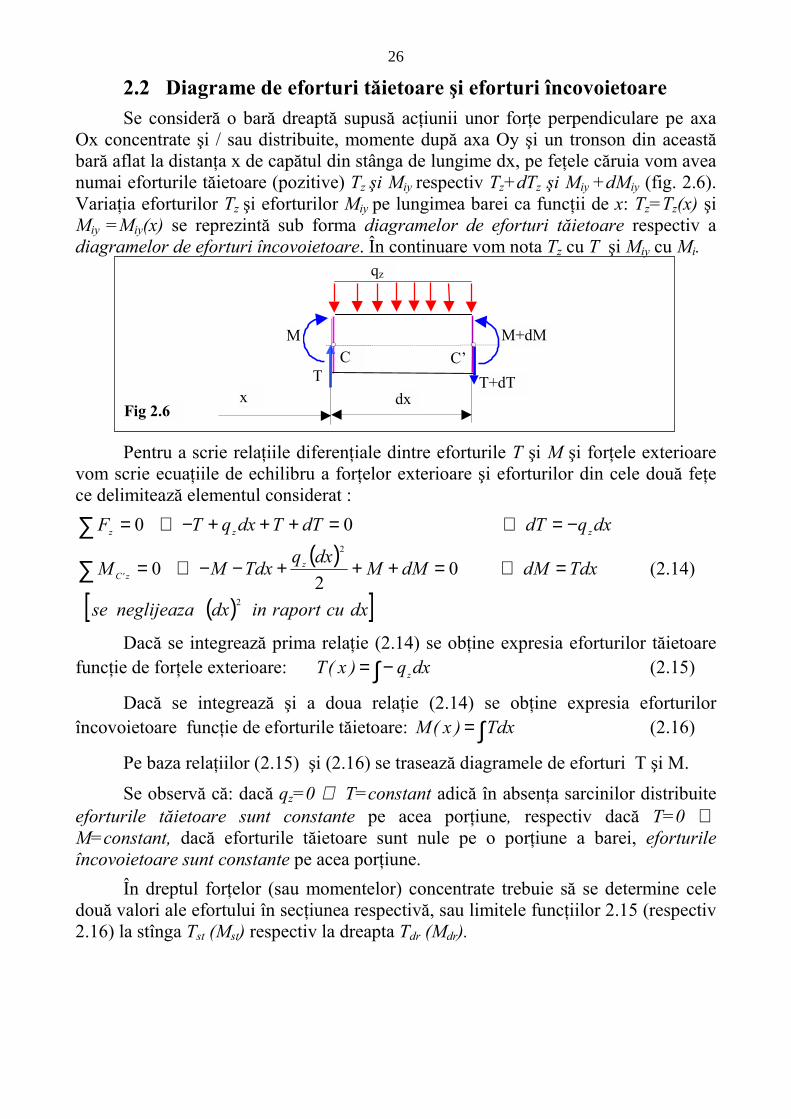
2.2 Diagrame de eforturi tăietoare şi eforturi încovoietoareSe consideră o bară dreaptă supusă acţiunii unor forţe perpendiculare pe axa
Ox concentrate şi / sau distribuite, momente după axa Oy şi un tronson din aceastăbară aflat la distanţa x de capătul din stânga de lungime dx, pe feţele căruia vom aveanumai eforturile tăietoare (pozitive) Tz şi Miy respectiv Tz+dTz şi Miy +dMiy (fig. 2.6).Variaţia eforturilor Tz şi eforturilor Miy pe lungimea barei ca funcţii de x: Tz=Tz(x) şiMiy =Miy(x) se reprezintă sub forma diagramelor de eforturi tăietoare respectiv adiagramelor de eforturi încovoietoare. În continuare vom nota Tz cu T şi Miy cu Mi.
Pentru a scrie relaţiile diferenţiale dintre eforturile T şi M şi forţele exterioarevom scrie ecuaţiile de echilibru a forţelor exterioare şi eforturilor din cele două feţece delimitează elementul considerat :
( )
( )[ ]dxcuraportindxneglijeazase
TdxdMdMMdxqTdxMM
dxqdTdTTdxqTF
zz'C
zzz
2
2
02
0
00
=⇒=+++−−⇒=
−=⇒=+++−⇒=
∑
∑
(2.14)
Dacă se integrează prima relaţie (2.14) se obţine expresia eforturilor tăietoarefuncţie de forţele exterioare: ∫−= dxq)x(T z (2.15)
Dacă se integrează şi a doua relaţie (2.14) se obţine expresia eforturilorîncovoietoare funcţie de eforturile tăietoare: ∫= Tdx)x(M (2.16)
Pe baza relaţiilor (2.15) şi (2.16) se trasează diagramele de eforturi T şi M.Se observă că: dacă qz=0 ⇒ T=constant adică în absenţa sarcinilor distribuite
eforturile tăietoare sunt constante pe acea porţiune, respectiv dacă T=0 ⇒M=constant, dacă eforturile tăietoare sunt nule pe o porţiune a barei, eforturileîncovoietoare sunt constante pe acea porţiune.
În dreptul forţelor (sau momentelor) concentrate trebuie să se determine celedouă valori ale efortului în secţiunea respectivă, sau limitele funcţiilor 2.15 (respectiv2.16) la stînga Tst (Mst) respectiv la dreapta Tdr (Mdr).
Fig 2.6
T T+dTx dx
qz
M M+dMC C’

27
ExempluSă de traseze diagramele de eforturi tăietoare şi eforturi încovoietoare pentru
bara dreaptă încărcată cu un sistem format din forţele distribuite qz1=2q , qz2=q,forţele concentrate F1=4qa, F2=5qa şi momentele încovoietoare M1=2qa2, M2=8qa2
ca în fig.2.7.
Se înlocuieşte legătura din stânga (încastrarea) prin forţa de legătură V0 şimomentul de legătură M0 (întrucât nu există sarcini şi cupluri axiale, H0 =0, Mt=0)(vezi fig. 2.8) şi se scriu ecuaţiile de echilibru ale forţelor exterioare şi de legătură:ΣFz=0 ⇒ +V0 + q1z ⋅ 2a –F1 +F2 - q2x ⋅ 4a =0 ⇒ V0 = qa (2.17)
ΣMOy=0 ⇒ - M0 + 2q⋅2a⋅a +4qa⋅3a - 2qa2 –5qa⋅5a+q⋅4a⋅7a - 8qa2 =0⇒ M0 = qa2 (2.18)
! Pe tronsonul 0-1 avem:
Eforturile tăietoare: ∫ +−=−=− 1110 2 Cqxdxq)x(T z (2.19)
Constanta de integrare C1 se determină din condiţia la limită pe tronsonul 0-1:
x=0 ⇒ T(0)=+V0 deci C1=qa ⇒ qaqx)x(T +−=− 210 (2.20)
În secţiunea 1 vom avea efortul: T1=T0-1(2a)=-3qa
Eforturile încovoietoare: ∫ ++−==− 22
10 CqaxqxTdx)x(M (2.21)
Constanta de integrare C2 se determină din condiţia la limită a tronsonului 0-1:
Fig 2.7
qz1
4aaqz2
2a 2a
F2
F1
M1 M2
Fig 2.8
qz1=2q
4a
z
0 1 3 42
qz2=q2a 2a
F2=5qaM1=2qa2
M2=8qa2
F1=4qa
M0
V0
x
a
28
x=0 ⇒ M(0)=+M0 deci C1=qa2 ⇒ 2210 qaqaxqx)x(M ++−=− (2.22)
În secţiunea 1 vom avea efortul: M1=M0-1(2a)=-qa2
! Pe tronsonul 1-2 avem:
Eforturile tăietoare: ∫ =−=− 321 Cdxq)x(T z (constant) (2.23)
Constanta de integrare C3 se determină din condiţia la limită pe tronsonul 1-2: x=0 ⇒ T(0)=T1=-3qa deci C2=-3qa ⇒ T1-2=-3qa (2.24)În secţiunea 2 vom avea efortul: T2st=T1-2(a)=-3qa
Eforturile încovoietoare: ∫ +−==− 421 3 CqaxTdx)x(M (2.25)
Constanta de integrare C4 se determină din condiţia la limită pe tronsonul 1-2:
x=0 ⇒ M(0)=M1 deci C1=-qa2 ⇒ 221 3 qaqax)x(M −−=− (2.26)
În secţiunea 2 vom avea efortul: M2st=M1-2(a)=-4qa2
! Pe tronsonul 2-3 avem:
Eforturile tăietoare: ∫ =−=− 532 Cdxq)x(T z (constant) (2.27)
Constanta de integrare C5 se determină din condiţia la limită pe tronsonul 2-3: x=0 ⇒ T(0)=T2dr= T2st +4qa=qa deci C5=q ⇒ T2-3=qa (2.28)În secţiunea 3 vom avea efortul: T3st=T2-3(2a)=qa
Eforturile încovoietoare: ∫ +==− 632 CqaxTdx)x(M (2.29)
Constanta de integrare C6 se determină din condiţia la limită pe tronsonul 2-3: x=0 ⇒ M(0)=M2dr=M2st+2qa2=-2qa2 deci C6=-2qa2
⇒ 232 2qaqax)x(M −=− (2.30)
În secţiunea 3 vom avea efortul: M3=M2-3(2a)=0! Pe tronsonul 3-4 avem:
Eforturile tăietoare: ∫ +=−=− 7243 Cqxdxq)x(T z (2.31)
Constanta de integrare C7 se determină din condiţia la limită pe tronsonul 3-4: x=0 ⇒ T(0)= T3dr= T3st -5qa=-4qa deci C1=-4qa
⇒ qaqx)x(T 443 −=− (2.32)
În secţiunea 4 vom avea efortul: T4=T3-4(4a)=0
Eforturile încovoietoare: ∫ +−==− 8
2
43 42
CqaxqxTdx)x(M (2.33)
Constanta de integrare C8 se determină din condiţia la limită a tronsonului 3-4:

29
x=0 ⇒ M(0)=M3 deci C1=0 ⇒ qaxqx)x(M 42
2
43 −=− (2.34)
În secţiunea 4 vom avea efortul: M4=M3-4(4a)=-8qa2
Se observă că în secţiunea 4 avem eforturile: T4=0 şi M4=-8qa2. Se observă căîn secţiunea din capătul din deapta efortul tăietor este zero şi efortul încovoietor esteegal cu momentul exterior ce acţionează în această secţiune (8qa2) cu semn schimbat,(conform convenţiei de semne pentru faţa pozitivă); spunem că diagramele deeforturi se închid.
Diagramele de eforturi tăietoare şi încovoietoare pentru exemplul considerat auforma din fig. 2.9.
Axa ordonatelor pentru diagrama de eforturi încovoietoare este orientată în jos.
qz1=2q
4a
z
0 1 3 42
qz2=q2a 2a
F2=5qaM1=2qa2
M2=8qa2
F1=4qa
M0=qa2
V0=qax
a
Diagrama T
Diagrama M
+
+
Fig 2.9
-3qa
qa
-4qa
++
+
--
--
-qa2
-4qa2
-2qa2
-8qa2
qa2
1,25qa2
a/2
qa

30
2.3 Diagrame de eforturi torsionaleSe consideră o bară dreaptă supusă acţiunii unor momente axiale concentrate şi
distribuite mx şi un tronson din această bară aflat la distanţa x de capătul din stânga,de lungime dx, pe feţele căruia vor acţiona numai eforturile axiale (pozitive) Mtxrespectiv Mtx+dMtx (fig. 2.10). Variaţia eforturilor axiale Mtx pe lungimea barei cafuncţii de x: Mtx = Mtx (x) se reprezintă sub forma diagramei de eforturi axiale.
Pentru a găsi relaţiile diferenţiale dintre eforturile Mtx şi cuplurile axialeexterioare vom scrie ecuaţia de echilibru a cuplurilor exterioare şi eforturilor ceacţionează asupra elementul considerat :
- Mtx +mx dx+ Mtx +dMtx =0 (2.35)
Rezultă dMtx =-mx dx sau xtx m
dxdM −= (2.36)
Dacă se integrează prima relaţie (2.36) se obţine expresia eforturilor axiale înfuncţie de forţele exterioare: ∫−= dxm)x(M xtx (2.37)
Pe baza relaţiei (2.37) se trasează diagramele de eforturi torsionale.Este evident faptul că dacă mx=0 ⇒ Mtx =constant, adică în absenţa sarcinilor
distribuite eforturile torsionale sunt constante pe acea porţiune.În dreptul momentelor axiale concentrate trebuie să se determine cele două
valori ale efortului Mtx în secţiunea respectivă sau limitele funcţiei 2.37:la stînga (Mtx st) respectiv la dreapta (Mtx dr).
Exemplu:Să de traseze diagrama de eforturi axiale pentru bara dreaptă încărcată cu un
sistem format din două cupluri distribuite mx1=Pa/a , mx2=2Pa/a şi două cupluriconcentrate Mtx1 =5Pa, Mtx2 =3Pa ca în fig.2.11.
Fig 2.10
Mtx Mtx+dMtx
x dx
mx
Fig 2.11
4a
Mtx1mx1
3aa 2a
mx2
0 1 3 42
Mtx2

31
Se înlocuieşte legătura din secţiunea 0 (încastrarea) cu cuplul de legătură Mt0(întrucât nu există alte sarcini exterioare: H0=0, V0=0 şi Miy=0) şi se scrie ecuaţia deechilibru a sarcinilor exterioare şi cuplului de legătură (fig. 2.12):
-Mt0 + mx1 ⋅ 4a + Mtx1 – m2x ⋅2a - Mtx2 =0 (2.38)De unde rezultă: Mt0 = 2Pa (2.39)
! Pe tronsonul 0-1:
∫ +−=−=− 1110 CPxdxm)x(M xtx (2.40)
Constanta de integrare C1 se determină din condiţia la limită a tronsonului 0-1:
x=0 ⇒ Mtx (0)=+ Mt0 deci C1=2Pa ⇒ ( )Pax)x(M tx 210 +−=− (2.41)
În secţiunea 1 vom avea efortul: Mt1 = Mtx 0-1(4a)=-2Pa
! Pe tronsonul 1-2: ∫ =−=− 221 Cdxm)x(M xtx (constant) (2.42)
Constanta de integrare C2 se determină din condiţia la limită a tronsonului 1-2: x=0 ⇒ Mtx (0)= Mt1=-2Pa deci C2=-2Pa ⇒ Mtx 1-2=-2Pa (2.43)
! Pe tronsonul 2-3: ∫ =−=− 332 Cdxm)x(M xtx (constant) (2.44)
Constanta de integrare C3 se determină din condiţia la limită a tronsonului 2-3: x=0 ⇒ Mtx (0) = Mt2dr= Mt2st -5Pa=-7Pa deci C3=-7Pa⇒ Mtx 2-3=-7Pa (2.45)
! Pe tronsonul 3-4:
∫ +=−=− 4243 2 CPxdxm)x(M x (2.46)
Constanta de integrare C4 se determină din condiţia la limită a tronsonului 3-4:
x=0 ⇒ Mtx (0)= Mt3=-7Pa deci C4=-7Pa ⇒ PaPx)x(M tx 7243 −=− (2.47)
În secţiunea 4 vom avea efortul: Mt4= Mtx 3-4(2a)=-3Pa. Se observă că efortulaxial din secţiunea de capăt este egal cu momentul exterior ce acţionează în aceastăsecţiune (3Pa) cu semn schimbat, conform convenţiei de semne pentru faţa pozitivă;spunem că diagrama de eforturi se închide.
Fig 2.12
4a
Mtx1=5Pamx1=P
3aa 2a
0 1 3 42
Mtx2=3PaMt0=2Pa
x
mx2=2P

32
Diagrama de eforturi axiale pentru exemplul considerat are forma din fig. 2.13.
Fig 2.13
4a
Mtx1=5Pamx1=P
3aa 2a
0 1 3 42
Mtx2=3PaMt0=2Pa
x
mx2=2P
Diagrama Mt +
2Pa
-2Pa
-7Pa
-3Pa-
+

33
CAPITOLUL IIICARACTERISTICI GEOMETRICE ALE
SECŢIUNILOR PLANE
3.1. DefiniţiiSe consideră o secţiune transversală plană într-o bară având aria A, un element
de arie elementară dA al secţiunii şi un sistem rectangular de axe Oyz. Poziţia acestuielement de arie în raport cu axele sistemului rectangular este dată coordonatele (y , z)şi respectiv în raport originea O de distanţa r (fig.3.1).
! Momentul static ale secţiuni plane în raport cu axa Oz (Sy) respectiv Oy (Sz), estedefinit prin integrala:
∫∫ ==A
zA
y dAySrespectivdAzS (3.1)
Dimensiunea pentru momentul static este [ ]S L= 3
În Sistemul Internaţional unitatea de măsură pentru momentul static este m3 .Ţinând seama de relaţia pentru calculul coordonatelor centrului de greutate al
secţiunii :
A
dAzzrespectiv
A
dAyy A
CA
C
∫∫== , (3.2)
rezultă: ;AyS;AzS CzCy ⋅=⋅= (3.3)
unde: A este aria secţiunii plane respective;zC, yC – sunt coordonatele centrului de greutate al secţiunii.În raport cu un sistem central de axe (un sistem pentru care O≡C), momentele
statice ale secţiunii plane sunt nule (cf. 3.3), deoarece: yC = zC = 0.
dA
Fig. 3.1
y
z
y
zC
Or
C
z
yC
C
Fig. 3.2
dA dA y
z
+y-y
O

34
! Momentul de inerţie axial al secţiunii plane în raport cu axa Oy şi Oz, este definitprin integrala (strict pozitivă):
∫∫ ⋅=⋅=A
zA
y dAyIrespectivdAzI 22 (3.4)
! Momentul de inerţie polar al secţiunii plane în raport cu polul O este definit prinintegrala (strict pozitivă):
( )∫∫ +=+=⋅=A
zyA
IIdAzydArI 2220 (3.5)
Se observă că momentul de inerţie polar este egal cu suma momentelor deinerţie (axiale) faţă de două axe rectangulare ce trec prin polul respectiv.
! Momentul de inerţie centrifugal al secţiunii plane în raport cu axele rectangulareOy şi Oz, este definit prin integrala:
∫ ⋅=A
yz dAyzI (3.6)
Din relaţia (3.6) se observă că momentele de inerţie centrifugale pot fi pozitive,negative sau nule. O secţiune plană având cel puţin o axă de simetrie aremomentul de inerţie centrifugal nul faţă de sistemul pentru care una din axe esteaxa de simetrie. Proprietetea este evidentă dacă se ţine seama că secţiunea esteformată în perechi de elemente de arie simetrice (fig. 3.2) şi se poate scrie:
0=⋅−⋅+ dAyzdAyz (3.7)
Dimensiunea corespunzătoare pentru momentele de inerţie este [ ] 4LI = .ÎnSistemul Internaţional unitatea de măsură pentru momentul de inerţie este m4
! Raza de inerţie a secţiunii plane axială (în raport cu o axă) respectiv polară (înraport cu polul O), se defineşte prin relaţiile:
AIi;
AIi;
AI
i zz
yy
00 === (3.8)
Dimensiunea corespunzătoare pentru raza de inerţie este [ ] Li =
În Sistemul Internaţional unitatea de măsură pentru raza de inerţie este m.Din formulele (3.8) rezultă: .AiI;AiI;AiI zzyy ⋅=⋅=⋅= 2
0022
deci razele de inerţie reprezintă distanţa fictivă de la axa sau polul considerat pânăla un punct în care ar fi concentrată întreaga arie a secţiunii considerate.
! Modulul de rezistenţă al secţiunii plane în raport cu o axă sau cu un pol, sedefineşte ca raportul dintre momentul de inerţie respectiv şi distanţa de la acea axăsau acel pol până la punctul cel mai îndepărtat al secţiunii:
.rIW;
yIW;
zI
Wmax
Omax
zz
max
yy
0=== (3.9)
Dimensiunea corespunzătoare pentru modulul de rezistenţă este [ ] 3LW = .

35
3.2. Calculul momentelor de inerţie la translaţia axelor Formulele lui Steiner.Se consideră o secţiune plană care se raportează la un sistem de axe Oyz, şi un
sistem de axe O’y’z’ paralel cu sistemul Oyz (fig. 3.3), obţinut prin două translaţiiefectuate cu distanţa a după axa Oy şi respectiv b după axa Oz.
Un element de arie dA al secţiunii plane are coordonatele (y, z) în raport cusistemul de axe Oyz, respectiv coordonatele (y’, z’) în raport cu sistemul de axeO’y’z’(fig. 3.3). Între aceste coordonate există relaţiile:
bz'z;ay'y +=+= (3.10)
Aplicând relaţiile (3.4) se calculează momentul de inerţie al secţiunii A înraport cu axa O’y’ respectiv axa O’z’:
( ) ( ) ( )( ) ( ) ( )∫∫∫
∫∫∫++=++=+=⋅=
++=++=+=⋅=
AaaSIdAaayydAaydA'yI
AbbSIdAbbzzdAbzdA'zI
zz'z
yy'y
22222
22222
22
22(3.11)
Aplicând relaţiile (3.6) se calculează momentul de inerţie centrifugal alsecţiunii A în raport cu axele O’y’ şi O’z’:
( )( ) ( )abAbSaSII
dAabbyazyzdAbzaydA'z'yI
zyyz'z'y
'z'y
+++=⇒
+++=++== ∫∫ ∫ (3.12)
Rezultă astfel formulele lui Steiner pentru calculul momentelor de inerţie latranslaţia axelor:
AabbSaSIIA)ba(aSbSIIII
AaaSII;AbbSII
zyyz'z'y
zyO'z'y'O
zz'zyy'y
⋅+++=++++=+=
⋅++=⋅++=22
22
22
22
(3.13)
Dacă sistemul Oyz este un sistem central de axe (O≡C), faţă de acestamomentele statice şi sunt nule (Sy =Sz=0) şi formulele lui Steiner (3.13) au formaparticulară:
dA
Fig. 3.3
y
z
O’
bC≡O
y'
z'
a
z'
y'
z
y
dA
Fig. 3.4
y
z
O
y'
z'
z
y
z'y'
α

36
AddII
dddunde;AdII
AdII
AdII
CCC
CC
CC
CC
y'yy'yyz'z'y
z'zy'yC'O
z'zz'z
y'yy'y
⋅⋅+=
+=+=
⋅+=
⋅+=
2222
2
2
(3.14)
3.3. Variaţia momentelor de inerţie la rotaţia axelorSe consideră o secţiune plană şi două sisteme rectangulare de axe: sistemul
iniţial Oyz, respectiv sistemul O’y’z’ rotit cu unghiul α faţă de Oyz (fig.3.4). Unelement de arie dA al secţiunii are coordonatele y şi z în raport cu sistemul de axeOyz, respectiv coordonatele y’ şi z’, în raport cu sistemul de axe Oy’z’. Între celedouă perechi de coordonate există relaţiile, conform figurii 3.4:
α−α⋅=α⋅+α⋅=
sinycosz'zcosysinz'y
(3.15)
Aplicând relaţiile (3.4) se poate calcula momentul de inerţie al secţiunii A înraport cu axele O’y’ respectiv O’z’:
( ) ( )( ) ( )( )( ) ( )( )
( ) ( )α−α+αα−=⇒
α⋅−α⋅α⋅+α⋅=⋅=
+=+=⋅+=
αα+α+α=α⋅+α⋅=⋅=
αα−α+α=α⋅−α⋅=⋅=
∫∫∫
∫∫∫∫
22
22
2222
2222
2
2
sincosIcossinIII
dAsinycoszcosysinzdA'z'yI
IIIIdA'z'yI
cossinIcosIsinIdAcosysinzdA'yI
cossinIsinIcosIdAsinycoszdA'zI
yzzy'z'y
'z'y
yz'y'zO
yzzy'z
yzzy'y
(3.16)
Deoarece IO’ = IO se observă că suma momentelor de inerţie axiale, în raport cuorice pereche de axe rectangulare ce trec printr-un punct O, este un invariat.Formulele (3.16) se mai pot scrie în funcţie de unghiul 2α astfel:
.cosIsinII
I
;sinIcosIIII
I
;sinIcosIIII
I
yzzy
'z'y
yzzyzy
'z
yzzyzy
'y
α+α−
=
α+α−
−+
=
α−α−
++
=
222
2222
2222
(3.17)
3.4. Valori extreme ale momentelor de inerţie axialeDeoarece momentele de inerţie Iz’ şi Iy’ depind de unghiul 2α, se poate
determina valoarea extremă a acestora şi poziţiile axelor de coordonate pentru care

37
momentele de inerţie au valori extreme. Pentru aceasta se anulează derivatele înraport cu unghiul 2α:
( )
( ) 02cos2sin22
02cos2sin22
'''
'''
==+−
=
=−=−−
−=
zyyzzyz
zyyzzyy
IIII
ddI
IIII
ddI
ααα
ααα
(3.18)
Din relaţia (3.18) rezultă următoarea proprietate: momentele de inerţie axialeau valori extreme faţă de acel sistem de axe în raport cu care momentul de inerţiecentrifugal este nul. Reciproca acestei proprietăţi nu este adevărată.
−
−=⇒−
−=zy
yz
zy
yz
III
arctgII
Itg
22
22 1αα (3.19)
respectiv: 2/22 1212 πααπαα +=⇒+= (3.20)
Deci cele două direcţii pentru care momentele de inerţie sunt maxime sauminime sunt perpendiculare. Dacă se înlocuiesc în expresiile (3.17) valorile lui 2α1respectiv 2α2 obţinute, rezultă valorile extreme ale momentelor de inerţie axiale:
( ) 2221 4
21
2 yzzyzy
, IIIII
I +−±+
= (3.21)
Aceste valori se numesc momente de inerţie principale, iar axelecorespunzătoare (perpendiculare între ele) se numesc axe de inerţie principale. Dacăse însumează momentele de inerţie principale (3.21), rezultă:
I1 + I2 = Iy +Iz = constant; (3.22)Deci suma momentelor de inerţie axiale faţă de orice pereche de axe
rectangulare ce trec printr-un punct dat, este un invariat.
3.5. Cercul momentelor de inerţieRelaţiile (3.17) pentru calculul momentelor de inerţie în raport cu un sistem de
axe rotit cu unghiul α se mai pot scrie sub forma:
;2sin2cos22' αα yz
zyzyy I
IIIII −
−=
+− (3.23)
.2cos2sin2'' αα yz
zyzy I
III +
−=
Ridicând la pătrat expresiile (3.23) şi însumând membru cu membru rezultă:
.22
2
2
2''
2
' yzzy
zyzy
y III
III
I +
−=+
+− (3.24)

38
Expresia obţinută reprezintă ecuaţia unuicerc într-un sistem de axe în care pe abscisă semăsoară momentele de inerţie axiale, iar peordonată momentele de inerţie centrifugale(fig.3.5) având centrul în punctul C decoordonate:
+0,
2zy II
C
şi raza:
( ) 22 421
yzzy IIIR +−= .
3.6. Caracteristici geometrice ale unor secţiuni plane simpleSe consideră următoarele secţiuni simple:
! O secţiune plană simplă în formă de dreptunghi, cu laturile b şi h raportată lasistemul central de axe Oyz (fig.3.6). Un element de arie, al acestui dreptunghi, seobţine ca o fâşie îngustă, de lungime b şi înălţime dz, situată la distanţa z de axaOy: dA=bdz. Momentul de inerţie axial al secţiunii dreptunghiulare, în raport cuaxa Oy, se poate scrie:
∫∫+
−
=⋅⋅=⋅=2
2
322
12
h
hy .bhdzbzdAzI (3.25)
Dacă se procedează în mod similar pentru calculul momentul de inerţie axial înraport cu axa Oz (elementul de arie se ia paralel cu axa Oz, dA=hdy) se obţine:
.hbdyhydAyI
b
bz ∫ ∫
+
−
=⋅⋅=⋅=2
2
322
12(3.26)
Momentul de inerţie polar, în raport cu punctul O, se calculează cu relaţia:
121212
2233 )hb(AhbbhIII zyO
+=+=+= (3.27)
unde A=bh este aria secţiunii dreptunghiulare.Din cauza simetriei, faţă de axele Oy şi Oz, momentul de inerţie centrifugal
este nul : Iyz = 0. (3.28)Razele de inerţie, se calculează cu relaţiile:
63
63 b
AIi;h
AI
i zz
yy ==== (3.29)
Fig. 3.5
I’z, I’y
I’yz
Iz
Iy
C
2α
M(I’y, I’yz)
M’(I’z, I’yz)

39
63 22
00
)hb(AIi
+== (3.30)
Modulele de rezistenţă în acest caz, se calculează cu relaţiile:
.hbArIW
;hbyIW;bh
zI
W
max
OO
max
zZ
max
yy
6
6622
22
+==
====(3.31)
! O secţiune simplă circulară pentru care elementul de arie se consideră un inel derază r şi lăţime dr (fig. 3.7): drrdA ⋅π= 2
(3.32)Momentul de inerţie polar se scrie:
322
42
0
22 ddrrrdArI/d
O
π=⋅π⋅=⋅= ∫ ∫ (3.33)
Din cauza simetriei există relaţia: zyzyO IIIII 22 ==+= (3.34)
de unde rezultă momentele de inerţie axiale:
642
4dIII Ozy
π=== (3.35)
Tot datorită simetriei, momentul de inerţie centrifugal este nul: Iyz = 0. Razelede inerţie pentru secţiunea circulară sunt:
44
64 2
4 dd
dAI
ii yzy =
π⋅π=== (3.36)
424
32 2
40
0
dd
dAIi =
π⋅π== (3.37)
Modulele de rezistenţă pentru secţiunea circulară sunt:
Fig. 3.7z
Cd y
dr
rz
yz dz
y
dy
b
C
Fig. 3.6
h

40
;32
264
2
34 dd
ddI
WW yzy
ππ =⋅=== (3.38)
.16
232
2
340 d
dd
dIWo
ππ =⋅== (3.39)
! o secţiune simplă sub formă de triunghioarecare raportată la un sistem de axe Oyz(axa Oy coincide cu baya triunghiului, ca înfig. 3.8). Baza triunghiului este b, înălţimeah, iar elementul de arie dA este o fâşieîngustă cu baza variabilă b’ şi înălţimea dz,paralelă cu axa Oy şi situată la distanţa zfaţă de axa Oy.Pe baza asemănării triunghiurilor avândbazele b şi b’ se poate scrie relaţia:
;'h
zhbb −= de unde rezultă:
( ).' zhhbb −= (3.40)
În acest caz suprafaţa elementului de arie se scrie:
( ) ;' dzzhhbdzbdA ⋅−=⋅= (3.41)
Aplicând formula (3.4) se poate calcula momentul de inerţie al secţiuniitriunghiulare faţă de axa Oy (care coincide cu baza triunghiului):
( ) .bhdzzhhbzdAzI
h
y 12
3
0
22 =−=⋅= ∫ ∫ (3.42)
Dacă dorim să determinăm caracteristicile geometrice în raport cu un sistem deaxe central, se aplică în mod corespunzător formulele lui Steiner (3.14) pentrutranslaţia axelor de coordonate:
362312
3232 bhbhhbhAzII CyyC
=⋅
−=⋅−=
Raza de inerţie este: ;hbh
bhA
Ii Cy
y 622
36
3
=⋅== (3.43)
Modulul de rezistenţă este:24
3236
2
3
bhh
bh
zI
Wmax
yy === (3.44)
y
z
zdz
b
Fig. 3.8
h
C
b'
h/3
O

41
3.7. Caracteristici geometrice pentru secţiuni plane compusePentru calculul caracteristicilor geometrice ale secţiunilor plane compuse se
descompun acestea în suprafeţe simple (ale căror caracteristici se pot calcula uşor),apoi se însumează ţinând seama de formulele pentru translaţiile sau rotaţiile axelor decoordonate locale faţă de sitemul de axe central. Dacă secţiunea plană compusăprezintă goluri, termenii corespunzători apar în formule cu semnul minus (sau sescad).
Pentru exemplificare, se consideră o secţiuneplană compusă, în formă de L, pentru care secere să se determine:! poziţia centrului de greutate,! momentele de inerţie şi modulele de
rezistenţă faţă de cele două axe centrale CyCşi CzC (fig.3.9).
! razele de inerţie corespunzătoare;! modulele de rezistenţă .
Pentru rezolvarea problemei, se descompune secţiunea în două dreptunghiuri,notate cu 1 şi 2, având centrele de greutate notate în figură cu C1 şi respectiv C2. Înnotarea momentelor de inerţie, indicele superior se referă la numărul dreptunghiuluisecţiunii compuse, iar indicele inferior la axa în raport cu care se calculează acestea.Cu dyy au fost notate distanţele dintre axe, iar cu A ariile dreptunghiurilorcorespunzătoare.! Calculul momentului de inerţie al secţiunii faţă de axa Oy :
Momentul de inerţie al dreptunghiului 1, faţă de axa centrală corespunzătoareacestuia C1y1 este:
( ) .aaaI )(y 12
64124 43
1
1== (3.45)
Momentul de inerţie al aceluiaşi dreptunghi, faţă de axa Oy, se determină utilizândformula lui Steiner pentru translaţia axelor:
( ) .aaaadAII yy)(
y)(
y 1225624
1264 4
224
21
11
11=+=⋅+= (3.46)
Pentru dreptunghiul 2 se procedează similar şi se obţine momentul de inerţie faţă de axa centrală corespunzătoare acestuia C2y2:
;aaaI )(y 12
212
2 432
2=⋅= (3.47)
respectiv momentul de inerţie faţă de axa Oy:
z
y
Fig. 3.9
4a C
2aa
a
C1
C2
z1
y1
zC
yC
y2
z2
O

42
.aaaadAII yy)(
y)(
y 128
22
122 42
24
22
22
22=
+=⋅+= (3.48)
Momentul de inerţie al întregii secţiuni faţă de Oy se obţine prin însumareavalorilor obţinute pentru momentele de inerţie ale dreptunghiurilor :
4444
21 2212
264128
12256 aaaaIII )(
y)(
yy ==+=+= . (3.49)
Raza de inerţie a secţiunii compuse în raport cu axa Oy este:
;311
622
2
4
aaa
AI
i yy === (3.50)
Modulul de rezistenţă faţă de aceeaşi axă se calculează astfel:
.a,aa
zI
Wmax
yy
34
554
22 === (3.51)
! În mod similar se calculează momentul de inerţie al secţiunii faţă de axa Oz :Momentul de inerţie al dreptunghiului 1, faţă de axa centrală C1z1 este:
( )124
124 43
1
1
aaaI )(z == (3.53)
Momentul de inerţie al aceluiaşi dreptunghi faţă de axa Oz, utilizând formulalui Steiner pentru translaţia axelor este:
( ) .aa,aadAII zz)(
z)(
z 1216504
124 4
224
21
11
11=+=⋅+= (3.54)
Se procedează similar pentru dreptunghiul 2 şi se obţine momentul său deinerţie faţă de axa centrală C2z2:
;a)a(aI )(z 12
8122 43
2
2=⋅= (3.55)
respectiv momentul de inerţie faţă de axa Oz:
( )1210422
128 4
224
22
22
22
aaaadAII zz)(
z)(
z =+=⋅+= (3.56)
Momentul de inerţie al întregii secţiuni faţă de Oz se obţine prin însumareavalorilor obţinute pentru cele două dreptunghiuri:
4444
21 1012120
12104
1216 aaaaIII )(
z)(
zz ==+=+= . (3.57)
Raza de inerţie a secţiunii compuse în raport cu axa Oz este:
35
610
2
4
aaa
AIi z
z === (3.58)

43
Modulul de rezistenţă faţă de aceeaşi axă este:
34
3333310 a,
aa
yIWmax
zz === (3.59)
! Momentul de inerţie centrifugal al secţiunii faţă de axele Oy şi Oz.Momentul de inerţie centrifugal al dreptunghiului 1, faţă de axele centrale C1y1 şiC1z1 este nul deoarece ambele sunt axe de simetrieMomentul de inerţie centrifugal al aceluiaşi dreptunghi faţă de axele Oy şi Oz,utilizând formula lui Steiner pentru translaţia axelor (3.14) este:
( ) 421
11 425040111
a)a(a,addAII yyzz)(
yz)(
yz =+=⋅⋅+= (3.60)
Se procedează similar pentru dreptunghiul 2 şi se obţine momentul său de inerţiecentrifugal faţă de axele Oy şi Oz:
( ) 422
22 225020222
a)a(a,addAII yyzz)(
yz)(
yz =+=⋅⋅+= (3.61)
Momentul de inerţie centrifugal al întregii secţiuni se obţine prin însumareavalorilor obţinute pentru cele două dreptunghiuri:
421 6aIII )(yz
)(yzyz =+= . (3.62)
În rezolvarea unor probleme de Rezistenţa materialelor intervin însăcaracteristicile geometrice faţă de axele centrale şi principale ale secţiunii. Pentrudeterminarea lor în cazul unor secţiuni compuse, se aplică relaţiile lui Steiner pentrutranslaţia axelor, după ce în prealabil s-au determinat caracteristicile geometrice faţăde două axe oarecare (Oy şi Oz) şi poziţia centrului de greutate al secţiunii. Dupădeterminarea acestor caracteristici se pot determina: momentele de inerţie principale(maxim şi minim în raport cu direcţiile principale), modulul de rezistenţă şi razele deinerţie corespunzătoare.
Pentru figura compusă considerată (fig. 3.9) vom calcula:! Poziţia centrului de greutate al secţiunii (fig. 3.9):
a,aa
a,aaaAA
dAdAd
aaa
aaa,aAA
dAdAd
yyyyyy
zzzzzz
C
C
5124
5022424
22504
22
22
21
21
22
22
21
21
21
21
=+
⋅+⋅=+
⋅+⋅=
=+
⋅+⋅=+
⋅+⋅=
(3.63)
! Momentele de inerţie al întregii secţiuni faţă de axele Cz şi Cy utilizând formulalui Steiner (3.14) pentru translaţia axelor:
( )( ) 42242
42242
5851622
4610
a,a,aadAII
aaaadAII
CC
CC
yyyy
zzzz
=−=⋅−=
=−=⋅−=(3.64)
! Razele de inerţie ale secţiunii compuse în raport cu axele Cz şi Cy :

44
1217
658
32
64
2
4
2
4
aaa,
AI
i;aaa
AI
i C
C
C
C
yy
zz ====== (3.65)
! Modulele de rezistenţă faţă de aceleaşi axe:
34
34
4352582
24 a,
a,a,
zI
W;aaa
yI
Wmax
yy
max
zz
C
C
C
C====== (3.66)
! Momentul de inerţie centrifugal al întregii secţiuni faţă de axele Cz şi Cy utilizândformula lui Steiner (3.14) pentru translaţia axelor:
( )( ) 424 35166 aa,aaaddAIICCC yyzzyzyz −=−=⋅⋅−= (3.67)
! Poziţia axelor principale cu ajutorul relaţiei (3.19):
02
01 565116565263331
22 ,si,,
II
Itg
CC
C
zy
yz =α=α⇒=−
−=α (3.68)
! Momentele de inerţie principale faţă de noile axe Czm şi Cym rotite cu ungiul α1 sedetermină utilizând formula (3.21):
( )44
4422
5210257
25124
21
2a,IIrespectivaII
a,a,IIIII
I
zmminymmax
yzzyzy
minmax, CCC
CC
====
±=+−±+
=(3.69)
! Razele de inerţie ale secţiunii compuse în raport cu axele Czm şi Cym :
;aaa,
AIi;a
aa
AI
i zmzm
ymym 24
10652
35
610
2
4
2
4
====== (3.70)
! Modulul de rezistenţă faţă de axa Cym (fig. 3.10):
.a,cosasinacosa,z;a,sinacosa,z
;a,)z;zmax(zunde
;a,a,
azI
W
E
A
EAmax
max
ymym
2362250683252
6832
7273683210
111
11
34
=α⋅+α⋅+α⋅==α⋅+α⋅=
==
===
! Modulul de rezistenţă faţă de axa Czm
(fig. 3.10):
;a,cosasina,y;a,cosasina,y
;a,sina,y;a,)y;y;ymax(yunde
;a,a,
a,yIW
O
D
B
ODBmax
max
zmzm
5651515651250
1181525651
5971565152
11
11
1
34
=α⋅+α⋅==α⋅+α⋅−=
=α⋅===
===
Fig. 3.10
C
2aa
a
zC
yC
O
0,5a
A B
D
E
2,5a
zm
ym
ymax
zmax
α1
α1

45
CAPITOLUL IVÎNCOVOIEREA BARELOR DREPTE
4.1. DefiniţiiO bară dreaptă este supusă la încovoiere dacă într-o secţiune oarecare
acţionează eforturi încovoietoare Miy , Miz. Dacă forţele care acţionează sunt situateîntr-un plan de simetrie ce conţine axa barei, spunem că bara este supusă laîncovoiere plană simplă dacă în secţiunea ei apar şi eforturi tăietoare, respectivîncovoiere pură, dacă în secţiunea ei apar numai eforturi încovoietoare (eforturităietoare sunt nule).
Dacă planul de acţiune al forţelor exterioare este diferit de planele de simetrieale barei, sau dacă bara nu are nici un plan de simetrie, spunem că avem încovoiereoblică. Dacă forţele care acţionează asupra barei nu sunt situate într-un singur plan,dar intersectează axa longitudinală a barei spunem că bara este supusă la încovoierestrâmbă. Dacă forţele care acţionează asupra barei nu intersectează axa longitudinalăa barei, spunem că bara este supusă la încovoiere cu răsucire.
4.2. Tensiunea la încovoiere pură. Formula lui NavierSe consideră o bară dreaptă supusă la încovoiere pură şi un element din
această bară de lungime dx aflat la distanţa x de capătul ei (fig. 4.1).Se fac următoarele notaţii:MN o fibră situată la distanţa z faţă deaxa neutră CC’;dϕ rotirea relativă a celor 2 supra-feţeale secţiunii elemntului dx;ρ raza de curbură a fibrei mediideformate: ϕρ= ddx , întrucât fibra dx nuîşi modifică lungimea.Se foloseşte ipoteza lui Bernoulli pentrusuprafeţele secţiunii :
ρ=
ϕρ−+ρ=−=∆=ε z
dxdxdx)z(
MNMN'N'M
MN)MN( (4.1)
Fibra medie deformată poate fi considerată o curbă rectificabilă z=f(x) (funcţiederivabilă de două ori) pentru care se poate scrie raza de curbură cu ajutorul relaţieicunoscute din geometria diferenţială:
Fig 4.1
Miy Miy+dMi
z
dx
M’ N’
C C’
M M
x
dϕρ

46
211
zz
′+′′
=ρ
(4.2)
Folosind ipoteza deformaţiilor mici se poate neglija 2z′ în raport cu 1 şi relaţia(4.2) se mai scrie:
2
21dx
zdz =′′=ρ
(4.3)
Folosind legea lui Hooke (care exprimă relaţia liniară între tensiunile σ şideformaţia specifică ε a fibrei MN determinată cu relaţia 4.1) tensiunea normală laîncovoierea pură se scrie:
zEzEE ω=ρ
=ε=σ (4.4)
unde dxdϕ=
ρ=ω 1 este rotirea specifică a secţiunii barei supusă la încovoiere.
Conform celor stabilite la capitolul I eforturile secţionale sunt rezultatulreduceri forţelor interioare elementare în centrul de greutate al secţiunii. În cazulbarei drepte supusă a încovoiere pură, în secţiune apar numai tensiuni normale σ careproduc forţe elementare normale la secţiune dF= σ dA. Putem deci scrie relaţiile deechivalenţă:
∫∫ ≠σ⋅==σ=A
iyA
dAzM;dAN 00 (4.5)
Din prima relaţie (4.5) rezultă: 000 =⇒=ω⇒=ω∫ yyA
SSEzdAE , adică
axa Oy trece prin centrul de greutate al secţiunii C. Din a doua relaţie (4.5) rezultă:
iyyiyA
MIEsauMdAzE =ω=ω∫ 2 ⇒ y
iy
EIM
=ω (4.6)
Temenul de la numitor EIy se numeşte rigiditatea la încovoiere a barei supusăla încovoiere.Înlocuind relaţia (4.6) în (4.4) se obţine formula lui Navier:
zI
MzE
y
iy ⋅=ω=σ (4.7)
Această formulă arată că tensiunea laîncovoierea pură într-un punct al secţiunii estedirect proporţională cu momentul încovoietordin secţiune şi cu distanţa z până la axaneutră. Este evident faptul că pentru punctelesituate pe axa Cy tensiunile sunt nule (σ=0)de aceea axa Cy se mai numeşte axă neutră.Tensiunea maximă (în valoare absolută) seobţine pentru punctele situate la distanţa ceamai mare de axa neutră:
C y
zσmax
σmin
Fig 4.2
zmax zC

47
y
iy
max
y
iymax
y
iymax W
M
zI
Mz
IM
==⋅=σ (4.8)
unde Wy este modul de rezistenţă la încovoiere în raport cu axa Oy (fig.4.2).Semnul lui σmax depinde de semnele mărimilor Miz şi zmax.
4.3. Calcule de rezistenţă al barelor supuse la încovoierea. Calcule de verificareSe consideră o bară dreaptă încărcată cu un sistem de forţe, pentru care se
cunosc: valoarea forţelor şi modul de amplasare, legăturile şi dimensiunile barei,forma şi dimensiunile secţiunii şi materialul din care este executată. Pentruverificarea la încovoiere a barei se parcurg următoarele etape:1. se determină reacţiunile şi se trasează diagrama eforturilor încovoietoare;2. se determină secţiunile periculoase ale barei şi valoarea momentului încovoietor
maxim (în modul) ;3. se determină modulul de rezistenţă al secţiunii (secţiunilor) barei;4. se calculează tensiunea σmax pentru secţiunea periculoasă şi se compară cu
tensiunea admisibilă a materialului: trebuie îndeplinită condiţia: amax σ≤σ
Rezistenţa admisibilă se determină în funcţie de tensiunea de curgere σc
(pentru materiale ductile) respectiv în funcţie de rezistenţa de rupere σr (pentrumateriale fragile) şi coeficientul de siguranţă corespunzător:
c
ca c
σ=σ , respectiv:r
ra c
σ=σ (4.9)
b) Calcule de dimensionareSe consideră o bară dreaptă încărcată cu un sistem de forţe, pentru care se
cunosc: valoarea forţelor şi modul de amplasare, legăturile şi dimensiunile barei,forma secţiunii şi materialul din care este executată bara. Pentru dimensionarea bareisupusă la încovoiere se parcurg următoarele etape:1. se determină reacţiunile şi se trasează diagrama eforturilor încovoietoare;2. se determină secţiunile periculoase ale barei şi valoarea momentului încovoietor
maxim (în modul);3. se determină modulul de rezistenţă al barei Wy în funcţie de parametrul s al
secţiunii: 3sWiy β= ; (4.10)4. se calculează parametrul s al secţiunii din condiţia:
33
a
maxiy
a
maxiy
a
maxiyynec
Ms
Ms
MW
σ⋅β=⇒
σ=⋅β⇒
σ= (4.11)

48
c) Calculul sarinii capabileSe consideră o bară dreaptă încărcată cu un sistem de forţe, pentru care se
cunosc următoarele elemente: direcţia forţelor şi modul de amplasare, legăturile şidimensiunile barei, forma şi dimensiunile secţiunii barei şi materialul din care esteexecutată bara. Pentru calculul sarcinii capabile se parcurg etapele:1. Se determină reacţiunile şi se trasează diagrama eforturilor încovoietoare.2. Se determină secţiunile periculoase ale barei şi valoarea momentului încovoietor
maxim (în modul) în funcţie de sarcina parametrică P.3. Se determină modulul de rezistenţă al secţiunii barei Wy ;5. Se calculează sarcina capabil Pcap din condiţia:
aycapmaxiy WPM σ=α= (4.12)
4.4. Tensiuni tangenţiale la încovoierea simplă.Formula lui Juravski.
Se consideră o bară dreaptă supusă la încovoiere simplă (într-o secţiune a eiexistă atât eforturi Miy cât şi Tz) şi un element din această bară de lungime dx aflat ladistanţa x de capătul barei fig. 4.3.
Fie AB o linie paralelă cu axaneutră Cy situată la distanţa z faţă deaceasta, de lungime b;
Pe suprafaţa elementară dA aflatăîn vecinătatea liniei AB acţionează atâttensiunile normale σ datorate efortuluiîncovoietor Miy (care se calculează cuajutorul formulei lui Navier) cât şitensiuni tangenţiale τ datorate eforturilortăietoare Tz.
Teorema dualităţii tensiunilortangenţiale stabileşte că tensiuniletangenţiale situale în două planeperpendiculare şi care suntperpendiculare pe muchia comună (liniade intersecţie a celor două plane) suntegale şi opuse: τxz=τzx (4.13)
Deci tensiunile tangenţiale (τzx) care acţionează asupra elementului de arie dAsituat pe faţa secţiunii transversale ABED sunt egale cu tensiunile tangenţiale (τxz)care acţionează asupra elementului da arie dA situat în secţiunea longitudinalăABB’A’ (fig. 4.3).
Fig 4.3
y
z
CMiy
Tz
A B
B’A’
b
dx
D E
D’ E’
dAσ
τzx
τxz
C’ Miy+d Miy
Tz+d Tz

49
Eforturile secţionale se obţin prin reducerea forţelor interioare elementare încentrul de greutate al secţiunii. În cazul de faţă asupra elementului de arie dinsecţiunea transversală acţionează:! forţa elementară normală: dFn= σ ⋅ dA! forţa elementară tangenţială: dFt= τzx ⋅ dA .
Pentru eforturile din secţiunea barei sunt valabile relaţiile de echivalenţă:∫∫∫ ≠σ⋅=≠τ==σ=A
iyA
zxzA
dAzM;dAT;dAN 000 (4.14)
Vom scrie în continuare ecuaţia de echilibru pentru forţele care acţioneazăasupra elementului de bară situat sub planul longitudinal ABB’A’:
( )
∫∫
∫∫
∫∫
⋅=⋅τ⇒=⋅+⋅τ−
=⋅
++⋅τ−⋅−
=σ+σ+⋅τ−σ−
'D'E'B'Ay
iyxz
'D'E'B'A y
iyxz
'D'E'B'A y
iyiyxz
ABED y
iy
'D'E'B'Axz
ABED
dAzI
dMbdxdAz
IdM
bdx
dAzI
dMMbdxdAz
IM
dAdbdxdA
0
0
0
(4.15)
Ţinând seama de relaţia pentru momentul static al secţiunii aflată sub linia ABfaţă de axa neutră Cy: ∫ ⋅=
'D'E'B'Ay dAz*S şi de relaţia diferenţială dintre eforturile Tz şi
Miy: dxdM
T iyz = din ultima relaţie rezultă formula lui Juravski:
y
yzxzzx
y
yiyxz bI
*ST
bI*S
dxdM
=τ=τ⇒=τ (4.16)
Este evident faptul că eforturile tangenţiale τzx pe linia DE sunt nule (deoarecemomentul static al secţiunii aflată sub linia DE faţă de axa Cy este nul) ceea ce aratăcă tensiunile tangenţiale din vecinătatea conturului sunt nule. De fapt tensiuniletangenţiale în vecinătatea conturului sunt paralele cu acesta. Tensiunea tangenţialămaximă se obţine pentru valorile S*max şi bmin.
Exemplul 1 Se consideră o bară dreaptă avândsecţiunea dreptunghiulară b×h (fig.4.4).Tensiunile tangenţiale τzx pe linia AB sedetermină formula lui Juravski :
y
yzzx bI
*ST=τ
în care momentul static al porţiunii dinsecţiunea barei situată sub linia AB (vezifig. 4.4) se calculează astfel :
y
z
z
Sy*= A*⋅ zC’b
C
Fig. 4.4
h
C’
zC’
A*
τmax
τ(z)A B

50
Sy*= A*⋅ zC’=
−=
+⋅
− 2
2
42221
2zhbzhzhb (4.17)
Deci obţinem:
−=⋅
−==τ
2
32
2
412312
42 hz
bhT
bhzhT
bI*S
T zz
y
yzzx (4.18)
Tensiunile tangenţiale τzx se reprezintă în fig. 4.4. ca o funcţie de gradul al IIlea (o parabolă), având un maxim pentru z=0:
bhT, z
maxzx 51=τ (4.19)
Deci tensiunile tangenţiale maxime τzxmax apar în punctele axei neutre şi sunt1,5 ori mai mari decât tensiunea tangenţială medie calculată cu formula de laforfecarea pieselor subţiri.
Exemplul 2 Se consideră o bară dreaptă avândsecţiunea circulară (fig.4.5) de diametrud. Tensiunile tangenţiale τzx pe linia ABse determină formula lui Juravski :
y
yzzx bI
*ST=τ
unde momentul static al porţiunii dinsecţiunea barei situată sub linia AB secalculează astfel (vezi fig. 4.5):
Sy*= A*⋅ zC’ (4.20)
( )ϕϕ−ϕ= cossind*A4
2
(4.21)
( ) )cossin()cos(sind
cossind
cosdcossindsindd
z 'C ϕϕ−ϕϕ−ϕ=
ϕϕ−ϕ
ϕ⋅ϕϕ−ϕ
ϕ⋅ϕ=
31
4
3434 2
2
22
Deci obţinem: ϕ= 33
12sind*S y ; de asemenea ϕ= sindb .
Introducând în formula lui Juravski se obţine:
ϕπ
=π
⋅ϕ
⋅ϕ==τ 224
33
316641
12sin
dT
dsindsindT
bI*S
T zz
y
yzzx (4.22)
C
A*
τmax
τ(z)
Fig. 4.5
z
Cd
y
A Bϕ
z
C
C’
zC’

51
Tensiunile tangenţiale τzx se reprezintă în fig. 4.4. ca o funcţie de gradul al IIlea în sinϕ având un maxim pentru ϕ=π/2:
AT
dT zz
maxzx 34
316
2 =π
=τ (4.23)
Deci tensiunile tangenţiale maxime τzxmax apar în punctele axei neutre şi sunt de1,333 ori mai mari decât tensiunea medie calculată cu formula de la forfecareapieselor subţiri.
Exemplul 3 Se consideră o bară dreaptă avândsecţiunea compusă din douădreptunghiuri ca în fig.4.6. Tensiuniletangenţiale τzx se determină formula luiJuravski :
y
yzzx bI
*ST=τ
Momentul de inerţie se determină aşacum s-a stabilit la capitolul 3:
a,a
a,aa,azC 526
5335132
22
=⋅+⋅=
( ) ( ) 4223
223
58312
33123 a,aaaaaaaaI y =⋅+⋅+⋅+⋅= (4.24)
Momentul static al unei porţiuni a secţiunii barei situată sub linia AA’ întrelinia inferioară şi o linie situată la distanţa z de axa neutră se calculează astfel :
Sy1*= A1*⋅ zC’= ( ) ( ) ( )222562
522152 za,aza,za,a −=+⋅− (4.25)
Tensiunile tangenţiale corespunzătoare acestei linii (situată la distanţa z) sunt:
( )
−=⋅−⋅==τ
2
2422 256
17581256
2 az,
aT
a,za,
aaT
bI*S
T zz
y
yzzx (4.26)
Pentru z=-0,5a se obţine: 22 3530176
aT,
aT zz
Azx ==τ
şi pentru z=0 se obţine un maxim local: 22 368017256
aT,
aT, zz
maxzx ==τ (4.27)
Momentul static al porţiunii din secţiunea barei situată deasupra liniei AA’(fig. 4.6) se calculează analog :
Sy2*= A2*⋅ zC’= ( ) ( ) ( )222522
35121513 za,aza,za,a −=+⋅− (4.28)
C
y
z
Fig 4.6
zC
3a
a
3a
a a
τmaxA A’ τA
τA’
z
A1*
z
A2*

52
Tensiunile tangenţiale corespunzătoare acestei zone sunt:
( )
−=⋅−⋅==τ
2
2422 252
17581252
63
az,
aT
a,za,
aaT
bI*S
T zz
y
yzzx (4.29)
Pentru z=-0,5a se obţine: 22 1170172
aT,
aT zz
'Azx ==τ (4.30)
Tensiunile tangenţiale τzx se reprezintă în fig. 4.6 ca o funcţie de gradul al IIlea având un maxim pentru z=0 şi un salt ( 'AzxAzx τ=τ 3 ) corespunzător lui z=-0,5aunde lăţimea variază de la a la 3a.
4.5. Lunecarea longitudinală a barelor cu secţiune compusăsupuse la încovoiere simplăSe consideră o bară dreaptă supusă la încovoiere simplă având secţiunea
compusă din două dreptunghiuri independente între ele (fig. 4.7) sau sudate între ele(fig. 4.8).
Pentru secţiunea compusă din două bucăţi independente între ele momentul deinerţie şi modulele de rezistenţă se determină ca sumă a momentelor de inerţie /modulelor de rezistenţă pentru fiecare din cele două părţi , astfel:
( )
( )
32134
2
22
34
1
11
32143
2
43
1
25050
250
5151
252
5225012
3
252123
aWWWa,a,a,
zI
W
;a,a,a,
zI
W
a,IIIa,aaI
;a,aaI
)(y
)(yy
max
)(y)(
y
max
)(y)(
y
)(y
)(yy
)(y
)(y
=+=⇒===
===
=+=⇒=⋅=
=⋅=
(4.31)
Fig 4.8
C y
z
zC
3a
a
3a
a a
Fig 4.7
C1y1
z
3a
a
3a
a a
C2 y2

53
Pentru secţiunea compusă din două bucăţi sudate (fig. 4.8) momentul de inerţiese determină la fel ca în cazul în care secţiunea ar fi dintr-o singură bucată (veziexemplul 3):
( ) ( )
34
4223
223
435258
58312
33123
a,a,a,
zI
W
a,aaaaaaaaI
max
yy
y
===
=⋅+⋅+⋅+⋅= (4.32)
Să considerăm cel mai simplu exemplu de încovoiere simplă: cazul unei barede lungime L aflată pe două reazeme rigide la capetele ei, încărcată cu o forţăconcentrată P la mijlocul distanţei între reazeme (fig. 4.9).
Pentru secţiunea compusă din două bucăţi independente în urma încărcării celedouă bare se deplasează una în raport cu cealaltă, sau alunecă longitudinal una înraport cu cealaltă (fig. 4.9.a). Prin sudarea celor două bucăţi (fig. 4.9.b) esteîmpiedicată lunecarea longitudinală şi cordonul de sudură este supus la forfecare,jumătate într-un sens, cealaltă jumătate în celălalt sens. Pentru a determina forţa deforfecare preluată de cordoanele de sudură (pentru jumătate din bară de lungime L/2şi lăţimea în dreptul cordonului a) se foloseşte relaţia:
aPLdxa
a,aaPdxa
bI*STdxaF
/L/L
y
z/L
xzf 343
58232
04
32
0
2
0
=⋅⋅⋅⋅=⋅⋅=⋅τ= ∫∫∫ (4.33)
C y
z
zC
3a
a
3a
a a
b) c)
g
Fig 4.9
P
P/2P/2
L
+
-
P/2
-P/2Diagrama T
dd
P
a)

54
Verificarea cordonului de sudură (având lăţimea g ca în fig. 4.9.c) se faceastfel:
aff
ff ag
PLga
PLAF
τ≤=⋅==τ3431
343 (4.34)
unde τaf este rezistenţa admisibilă la forfecare a cordonului de sudură.Dacă în locul cordonului de sudură sunt prevăzute două bolţuri cilindrice de
diametru d (fig. 4.9.b) (aproape de capete) atunci relaţia pentru verificarea acestorelemente de rigidizare este :
aff
ff ad
PLda
PLAF
τ≤π
=π
⋅==τ 22 1764
343 (4.35)
4.6. Deformaţiile barelor supuse la încovoiere. Ecuaţiadiferenţială a fibrei medii deformate.Se consideră o bară dreaptă de lungime L supusă la încovoiere simplă având
rigiditatea la încovoiere EIy constantă pe lungimea sa. La paragraful 4.2 s-a arătat căfibra medie deformată (sau linia elastică a barei) este caracterizată de ecuaţiadiferenţială :
y
iy
EIM
dxwd
dxd =ω==ϕ=
ρ 2
21 (4.36)
Întrucât pentru sistemul de axe ales Oxz un moment încovoietor pozitiv aplicatla capetele barei produce totdeauna săgeţi w(x) pozitive rezultă că derivata a douăeste negativă w”(x)<0, de aceea este necesar ca în relaţia (4.36) să se introducăsemnul minus, adică ecuaţia diferenţială a rotirilor specifice şi a fibrei mediideformate se scrie:
y
iy
EIM
dxwd
dxd −==ϕ
2
2
(4.37)
Dacă se integrează ecuaţia diferenţială (4.37) se obţine rotirea secţiunii aflate ladistanţa x de capătul barei. Aceste rezultate se pot obţine prin metode analitice saumetode grafo-analitice aşa cum rezultă din cele prezentate în continuare.
A
x
Fig 4.10z
w0
ϕ0ϕ(x)
w(x)xB
L

55
a. Metoda funcţiei de încărcare sau a funcţiei de forţă 1
Aceasta este o metodă analitică, care utilizează aşa numita funcţie de încărcaresau funcţie de forţă. Integrând ecuaţia diferenţială (4.37) se obţine rotirea secţiuniiaflate la distanţa x de capătul barei:
yy
iy
EI)x(dx
EIM
dxdw)x( Φ′
+ϕ=−==ϕ ∫ 0 (4.38)
unde: ϕ0 este rotirea secţiunii aflate la capătul din stânga al barei (originea barei),
dxM)x( iy∫−=Φ′ (4.39)
reprezintă derivata funcţiei Φ(x), numită funcţie de încărcare sau de forţă. Dacă se integrează încă o dată ecuaţia diferenţială (4.38) şi se ţine seama de
relaţia (4.39) se obţine săgeata (deplasarea după Oz) secţiunii aflate la distanţa x decapătul barei:
yEI)x(xw)x(w Φ+ϕ+= 00 (4.40)
unde s-a notat cu w0 deplasarea secţiunii din capătul din stânga al barei.Constantele de integrare ϕ0 şi w0 se mai numesc parametrii din origine şi se
determină din condiţiile la limită ce se impun barei supuse la încovoiere (fiedeplasările impuse în dreptul reazemelor rigide sau elastice, fie rotirile ϕ impuse dinîncastrări sau culisele elastice).
Se consideră în continuare o bară dreaptă OB de lungime L având rigiditatea laîncovoiere EIy constantă pe lungimea sa care este supusă la încovoiere simplădatorită acţiunii a trei tipuri de sarcini exterioare (care pot fi atât forţe direct aplicatecât şi forţe de legătură): un moment încovoietor N la distanţa a, o forţă concentrată Pla distanţa b şi o sarcină distribuită q la distanţele c şi d ca în fig. 4.11.
Funcţia de încărcare Φ(x), se determină cu ajutorul următoarei relaţii generale:
1 Funcţia de încărcare (de forţă) a fost introdusă de către prof. dr. ing. Mihail ATANASIU în lucrarea
“Metode analitice noi în Rezistenţa materialelor” Ed. U.P.Bucureşti 1994
x
Fig 4.11z
O
b
B
L
ac d
x
PN q

56
( ) ( )
( ) ( )dxdx!
)dx(qcxcx!
)cx(q
bxbx!
)bx(Paxax!
)ax(N)x(
−+−⋅−−−+−
⋅−+
+−+−⋅−+−+−
⋅−=Φ
4242
322233
2
(4.41)
iar derivata funcţiei de încărcare se determină astfel:
( ) ( )
( ) ( )dxdx!
)dx(qcxcx!
)cx(q
bxbx!
)bx(PaxaxN)x(
−+−⋅−−−+−
⋅−+
+−+−⋅−+−+−=Φ′
3232
22222
(4.42)
Parantezele din relaţiile de mai sus practic anulează efectul sarcinilor la stângapunctului sau începutului intervalului lor de acţiune:
( ) .etcaxpentru)ax(
axpentruaxax
>−≤
=−+−20
(4.43)
Ţinând seama de relaţiile (4.41), (4.42) şi (4.43) se obţine o regulă mult maisimplă pentru calculul acestor funcţii într-un punct k al barei este dată în fig. 4.12:
b. Metoda lui MohrDacă se integrează ecuaţia diferenţială (4.37) pe intervalul (0, x) se obţine
rotirea secţiunii aflate la distanţa x de capătul barei:
00
ϕ+−==ϕ ∫ tgdxEIM
dxdwtg
x
y
iy (4.44)
sau: y
x
EItgtg 0
0
Ω−=ϕ−ϕ (pentru unghiuri mici ϕ≅ϕtg ) (4.45)
unde ∫=Ωx
iyx dxM0
0 reprezintă aria diagramei momentelor încovoietoare pe
intervalul (0, x) (fig. 4.13).
2
2N
k
rN⋅=ΦkN
rN
6
2P
k
rP⋅=ΦP k
rP
24
44 )rR(q qqk
−=Φ
kq
Rqrq
Fig.4.12
1N
k
rN⋅=Φ′
2
2P
k
rP⋅=Φ′
6
33 )rR(q qqk
−=Φ′

57
Relaţia (4.45) se numeşte ecuaţia rotirilor şi permite calculul rotirii ϕ într-osecţiune oarecare a barei cu condiţia să se cunoască rotirea ϕ0 într-o secţiuneconsiderată ca origine şi aria diagramei de momente încovoietoare Ω0x.
Dacă se integrează încă o dată relaţia (4.45) se obţine:
∫ +Ω−=ϕ⋅−x
xy Cdx)tgxw(EI0
00 (4.46)
Dacă se integrează prin părţi integrala din membrul drept se obţine:
002010100
000
0 xxxxx
x
xx
x
x Sd)dx(dxxdxdx =Ω⋅=Ω−=Ω⋅−Ω=Ω−Ω=Ω ∫∫ (4.47)
unde Sx0 reprezintă momentul static al diagramei de momente încovoietoarefaţă de o axă paralelă cu Oz situată la disatanţa x de origine.
Constanta de integrare se obţine tot din condiţiile la limită (în origine):CS)tgw(EI xy +−=ϕ⋅− 000 0 (4.48)
Relaţia (4.46) devine:
000 xy S)tgxww(EI −=ϕ⋅−− sau: (4.49)
y
x
EIStgxww 0
00 −=ϕ⋅−− (4.50)
Relaţia (4.50) se numeşte ecuaţia săgeţilor şi permite calculul săgeţii w într-osecţiune oarecare a barei cu condiţia să se cunoască săgeata w0 şi rotirea ϕ0 însecţiunea considerată ca origine şi momentul static al diagramei de momenteîncovoietoare Sx0.
Metoda de calcul grafo-analitică de mai sus se mai numeşte metoda lui Mohr.
x
Fig 4.13
z
O
b
B
L
ac d
x
PN q
Ω0x
Diagrama M+
x
d1 d2
C

58
Aceste relaţii sunt valabile pentru orice tronson al barei, astfel încât se potcalcula din aproape în aproape rotirile şi săgeţile pentru capetele fiecare tronson.
Aplicarea formulelor (4.45) şi (4.50) pentru calculul rotirilor şi săgeţilor se faceprin suprapunerea efectelor satrcinilor care acţionează pe tronsonul respectiv: pentrucele trei tipuri de sarcini ale căror diagrame M(x) au forma din tabelul 4.1 formulelede calcul ale ariei şi momentului static al diagramelor de momente încovoietoare suntdate în tabel:
Tabelul 4.1:Caz de încărcare şi
diagrama de momenteAria diagramei
ΩΩΩΩ01010101
Momentul static ladiagramei S10
Ω01=-aN S10=-a2N/2
Ω01=-a2 P/2 S10=-a3P/6
Ω01=-a3q/6 + b3q/6 S10=-a4q/24 + b4q/24
C
z xd2=a/2a
-N
O
N
-
0 1
z xd2=a/3a
-Pa
O
P0 1
- C
aq
0 1
z
xd2=a/4
-qa2/2
O -
+qb2/2
b
d'2=b/4

59
CAPITOLUL VGRINZI CONTINUE
Grinzile continue sunt sisteme static nedeterminate de tipul barelor dreptesituate pe mai multe reazeme, libere la capete sau încastrate, cu sau fără console, caîn fig. 5.1. Reazemele pot fi situate la acelaşi nivel, sau pot fi denivelate. Reazemelese consideră punctuale şi rigide.
În cazul unei grinzi continue plane situată pe n reazeme avem n+1necunoscute: H1, V1, V2, ... Vn şi se pot scrie din Mecanică 3 ecuaţii de echilibru:
∑∑∑ === ;M;F;F yzx 000
Aceasta este un sistem static nedeterminat având gradul de nedeterminare: GN=n-2În cazul barelor încastrate la un capăt şi situate pe n reazeme acestea se pot
echivala cu o grindă continuă pe n+2 reazeme (cu b0=0 , fig. 5.2) care introduce n+3necunoscute, deci este un sistem static nedeterminat având: GN=n
Pentru rezolvarea unor astfel de sisteme se pot folosi metode grafo-anlitice sauanalitice după cum urmează.
Fig 5.1
b1
P Nq
c b2 b2 b3
b1
P Nq
b2 b2 c
V1
H1V2 V3 V4 V5
M0H0
V0 V1 V2 V3
a.
b.
Fig 5.2
b1
PNq
b2 b2 cb0
V’0 V0V1 V2 V3
H0

60
a. Ecuaţia celor trei momente (ecuaţia lui Clapeyron)Dacă se secţionează bara în dreptul reazemului n, se pot pune în evidenţă două
tipuri de reacţiuni necunoscute (se face abstracţie de reacţiunile orizontale H fig. 5.3):! Momentul încovoietor Mn care este acelaşi pentru cele două tronsoane care
concură în reazemul n;! Reacţiunile Vns şi Vnd diferite pentru cele două tronsoane din reazemul n;
Dacă se consideră cazul general în care cele trei reazeme consecutive sunt şidenivelate cu valorile wn-1 wn, wn+1, iar momentele de inerţie diferă pe cele douătronsoane In şi In+1, se scrie ecuaţia săgeţilor conform metodei lui Mohr pentrufiecare din cele două tronsoane alegând următoarele sensuri de deplasare:! pentru primul tronson de la n la n-1:
nn
n
n
nnnn
n
nnnnn EIb
Sb
wwtgEIStgbww 111
1−−−
− +−=ϕ′=ϕ′⇒−=ϕ′−− (5.1)
! pentru al doilea tronson de la n la n+1:
11
1
1
1
1
111
++
+
+
+
+
+++ +−=ϕ′=ϕ ′′⇒−=ϕ ′′−−
nn
n
n
nnnn
n
nnnnn EIb
Sb
wwtgEIStgbww (5.2)
Dacă se ţine seama că rotirile în dreptul reazemului n sunt egale şi opuse ca semn:0=ϕ ′′+ϕ′ϕ ′′−=ϕ′ nnnn sau , (5.3)
se obţine:
011
11
1
11 =++−+−
++
+−
+
+−
nn
n
nn
n
n
nn
n
nn
EIbS
EIbS
bww
bww (5.4)
Se exprimă momentele statice Sn-1, Sn+1, ale diagramelor de momente staticnedeterminate datorate momentelor Mn-1, Mn, Mn+1 şi ale diagramelor de momentedatorate sarcinilor exterioare astfel (vezi fig. 5.4):
321
32
21
32
21
321
111
1111
111
+++
++++
−−−
⋅+⋅+=
⋅+⋅+=
nnn
nnn
snn
nnn
nnn
snn
bbMbbMSS
bbMbbMSS (5.5)
Fig 5.3
bnVn-1d
nn-1 n+1
Vnsbn+1Vnd
n
Vn+1s
Mn-1 Mn Mn

61
Relaţia (5.4) devine: (5.6)
02661
11
1
11
11
11
1
11 =+
+++
++
−+
−
+
++
+
+−
++
+−
+
+−
n
nn
n
nn
n
nn
n
nn
nn
sn
nn
sn
n
nn
n
nn
IbM
IbM
IbM
IbM
IbS
IbS
bww
bww
E
Aceasta se numeşte ecuaţia celor trei momente sau ecuaţia lui Clapeyron.Pentru cazul particular în care bara are aceeaşi rigiditatela încovoiere EI şi nu
există denivelări ale reazemelor (wn-1=wn=wn+1 =0) relaţia (5.6) devine:
0621
111111 =
+++++
+
+−+++−
n
sn
n
sn
nnnnnnn bS
bS
bM)bb(MbM (5.7)
Ultima paranteză reprezintă suma reacţiunilor din reazemul n pentru barelereciproce corespunzătoare celor două tronsoane de lungimi bn şi bn+1.
Reacţiunile din reazemul n se determină prin suprapunerea efectului celor douăseturi de reacţiuni corespunzătoare fiecărui tronson:
1
11
+
+− −++−+=n
nnnd
n
nnnsn b
MMVb
MMVV unde: (5.8)
Vns , Vnd sunt reacţiunile din reazemul n ale sarcinilor exterioarecorespunzătoare celor două tronsoane de lungimi bn şi bn+1.
1
11
+
+− −=′′−=′n
nnn
n
nnn b
MMV;b
MMV (5.9)
sunt reacţiunile suplimentare datorate celor trei momente Mn-1 , Mn Mn+1pentru cele două tronsoane din reazemul n;
În cazul unei grinzi continue cu încastrare în capăt (fig. 5.1.b) se înlocuieşteaceastă încastrare cu două reazeme situale la distanţa b0=0. Ecuaţia celor treimomente pentru reazemele 0-1-2 se scrie în acest caz:
0621
11110 =++
bSbMbM
s
(5.10)
Fig 5.4
bn
nP1 n+1
bn+1
n
Mn-1 Mn Mn
P2n-1P3
Mn-1 Mn
bn/3 bn/3
xn-1
Mn+1Mn
bn+1/3 bn+1/3
xn+1
Mn+1

62
b. Metoda funcţiei de încărcare1
Este o metodă analitică care elimină construcţiile grafice ale metodei Clpeyron,permiţând determinarea directă a reacţiunilor din legăturile grinzii cu mediul fix.Această metodă se bazează pe scrierea ecuaţiilor de deformaţii cu ajutorul funcţiei deîncărcare, prezentată în capitolul de încovoiere a barelor drepte:
)x('EI(x)EI)x(xEIEIwEIw(x)
Φ+ϕ=ϕΦ+ϕ+=
0
00 (5.11)
Aceste ecuaţii de deformaţii se referă fie la valoarea săgeţii în dreptulreazemelor, fie la valoarea rotirii secţiunii în încastrare.
Ecuaţia de deformaţii legate de deplasări se mai poate scrie cu ajutorul ecuaţieicelor trei săgeţi care se obţine astfel:! se scriu săgeţile corespunzătoare celor trei puncte i, j, k aflate la distanţele xi, xj,
respectiv xk de capătul barei (fig. 5.5):( )( )( ) iiikk
jiiijj
jiii
LEIw)Lx(EIxEIw
)LL(EIw)Lx(EIxEIw
LEIwxEIxEIw
00
00
00
++ϕ+Φ=
+−++ϕ+Φ=
+ϕ+Φ=
(5.12)
! se amplifică fiecare din cele trei ecuaţii cu expresiile din dreapta şi se adunămembru cu membru, iar după reducerea termenilor asemenea se obţine ecuaţiacelor trei săgeţi:
[ ] ikijjjiikijjji L)LL(LLw)LL(wLwEI Φ++Φ−Φ=++− (5.13)
unde Φi, Φj, Φk sunt funcţiile de încărcare calculate în punctele i, j, kcorespunzătoare secţiunilor aflate la distanţele xi, xj, respectiv xk de capătul barei.
1 Acestă metodă pentru calculul reacţiunilor este prezentată de prof. dr. ing. Mihail ATANASIU în lucrarea
“Metode analitice noi în Rezistenţa materialelor” Ed. U.P.Bucureşti 1994
w i w j w k
L jL ix ix j
x k
Fig.5.5
i j k
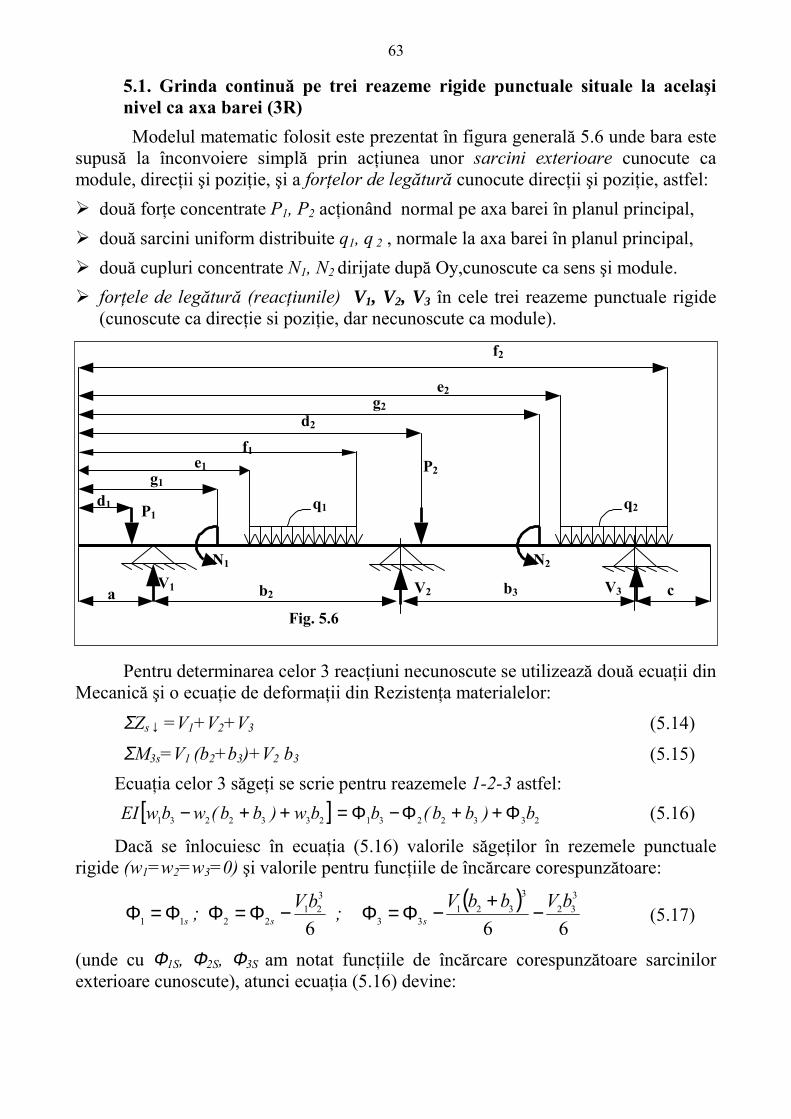
63
5.1. Grinda continuă pe trei reazeme rigide punctuale situale la acelaşinivel ca axa barei (3R)Modelul matematic folosit este prezentat în figura generală 5.6 unde bara este
supusă la înconvoiere simplă prin acţiunea unor sarcini exterioare cunocute camodule, direcţii şi poziţie, şi a forţelor de legătură cunocute direcţii şi poziţie, astfel:! două forţe concentrate P1, P2 acţionând normal pe axa barei în planul principal,! două sarcini uniform distribuite q1, q 2 , normale la axa barei în planul principal,! două cupluri concentrate N1, N2 dirijate după Oy,cunoscute ca sens şi module.! forţele de legătură (reacţiunile) V1, V2, V3 în cele trei reazeme punctuale rigide
(cunoscute ca direcţie si poziţie, dar necunoscute ca module).
Pentru determinarea celor 3 reacţiuni necunoscute se utilizează două ecuaţii dinMecanică şi o ecuaţie de deformaţii din Rezistenţa materialelor:
ΣZs ↓ =V1+V2+V3 (5.14)ΣM3s=V1 (b2+b3)+V2 b3 (5.15)
Ecuaţia celor 3 săgeţi se scrie pentru reazemele 1-2-3 astfel:[ ] 23322312332231 b)bb(bbw)bb(wbwEI Φ++Φ−Φ=++− (5.16)
Dacă se înlocuiesc în ecuaţia (5.16) valorile săgeţilor în rezemele punctualerigide (w1=w2=w3=0) şi valorile pentru funcţiile de încărcare corespunzătoare:
( )666
332
3321
33
321
2211
bVbbV;bV; sss −+−Φ=Φ−Φ=ΦΦ=Φ (5.17)
(unde cu Φ1S, Φ2S, Φ3S am notat funcţiile de încărcare corespunzătoare sarcinilorexterioare cunoscute), atunci ecuaţia (5.16) devine:
f2
e1
a c b2 b3
P1
N2
P2
N1
q1 q2
V3 V2 V1
e2
f1
d1
d2
g2
g1
Fig. 5.6

64
( ) ( ) 0666 2
332
3321
332
321
231 =
−+−Φ++
−Φ−Φ bbVbbVbbbVb sss (5.18)
Notând cu A2s expresia : ;b)bb(bA ssss 23322312 Φ++Φ−Φ= (5.19)
atunci ecuaţia (18) devine:( ) ( )
sAbbVbbbVbbbV2
33222
332132
321
666−=−+−+ (5.20)
Dacă se multiplică ecuaţia (5.15) cu 6
232bb şi se adună cu ecuaţia (5.20)
membru cu membru, se elimină V1 şi rezultă:
( ) ( ) ( )sS AMbbbbbbbbbbbbV 23
2322
332
323221
232
1 6666−=
+−+++ ∑!
(5.21)
Efectuând calculele din paranteză rezultă reacţiunea V1:
( )
−
+= ∑ s
s Mb
bbA
bbbV 3
3
32
2
3221 2
31 !(5.22)
Din ecuaţia (5.15) se obţine reacţiunea V2:
13
23
32 11
Vbb
Mb
V s
+−= ∑
!(5.23)
Din ecuaţia (5.14) rezultă reacţiunea V3:
213 VVZV i −−↓= ∑ (5.24)
5.2. Grinda continuă pe patru reazeme rigide punctuale situale la acelaşinivel cu axa barei (4R)Modelul matematic folosit este prezentat în fig. 5.7. Asupra barei acţionează
un sistem de sarcini după cum urmază:! două forţele concentrate P1, P2, acţionând normal pe axa barei în planul principal,
la distanţele d1 şi d2 de capătul barei;! două sarcini uniform distribuite q1, q 2 cunocute ca module, direcţii si poziţii pe
bară, acţionând normal pe axa barei în planul principal! două momente concentrate după axa Oy: N1, N2 cunoscute ca sens şi module.! cele patru reacţiuni din reazemele simple punctuale rigide cu care bara este legată
de mediul fix, sub forma forţelor concentrate V1, V2, V3, V4, cunoscute ca direcţii sipoziţie pe bară, dar necunoscute ca module.

65
Pentru determinarea reacţiunilor se calculează mai întâi funcţiile de încărcareale sarcinilor exterioare Φ1S, Φ2S, Φ3S, Φ4S , suma tuturor forţelor exterioare cu sensulplus indicat (ΣZS↓ ), suma momentelor tuturor sarcinilor exterioare faţă de reazamul 4cu sensul plus trigonometric (sensul axei Oy) : ΣM4S.
Pentru determinarea celor patru reacţiuni se folosesc două ecuaţii de echilibrudin Mecanică şi două ecuaţii de deformaţii, după cum urmează :
ΣZs ↓ =V1+V2+V3+V4 (5.25)ΣM4s=V1(b2+b3+b4)+V2(b3+b4)+V3(b4) (5.26)Celelalte două ecuaţii se scriu aplicând ecuaţia celor trei săgeţi pentru cele
două triplete de reazeme: 1-2-3 şi 2-3-4:[ ] 23322312332231 b)bb(bbw)bb(wbwEI Φ++Φ−Φ=++− (5.27)[ ] 34433423443342 b)bb(bbw)bb(wbwEI Φ++Φ−Φ=++− (5.28)
unde dacă se înlocuiesc valorile săgeţilor în rezemele punctuale rigide (toate suntnule) şi valorile pentru funcţiile de încărcare din reazeme :
( )
( ) ( )666
66
6
343
3432
34321
33
332
3321
33
321
2211
bVbbVbbbV
;bVbbV
;bV;
s
s
ss
−+−++−Φ=Φ
−+−Φ=Φ
−Φ=ΦΦ=Φ
(5.29)
ecuaţiile (5.27) şi (5.28) devin:
e1
a c b2 b3 b4
P1
N2
P2
N1
q1 q2
V3 V2 V1 V4
e2
f2
f1
d1
d2
g2
g1
Fig. 5.7

66
( ) ( ) 0666 2
332
3321
332
321
231 =
−+−Φ++
−Φ−Φ bbVbbVbbbVb sss (5.30)
( ) ( )
( ) ( ) 0666
666
3
343
3432
34321
3
43
332
3321
34
321
2
=
−+−++−Φ+
++
−+−Φ−
−Φ
bbVbbVbbbV
bbbVbbVbbV
s
ss
(5.31)
Dacă se notează în ecuaţiile (5.19) şi (5.20) :
34433423
23322312
b)bb(bAb)bb(bA
ssss
ssss
Φ++Φ−Φ=Φ++Φ−Φ=
(5.32)
atunci ecuaţiile (5.30) şi (5.31) se scriu astfel:( ) ( )
sAbbVbbbVbbbV2
23322
332132
321
666−=−+−+
(5.33)
( ) ( ) ( )
( ) ( )sAbbVbbbVbbbbV
bbbVbbbbVbbV
33
3433
34323
34321
4333243
3321
4
321
666
666
−=−+−++−
−+++++− (5.34)
Dacă se multiplică ecuaţia (5.26) cu
443bb şi se adună cu ecuaţia (5.34)
multiplicată cu
423b
, eliminăm pe V3 şi rezultă :
( ) ( ) ( ) ( )
( ) ( )4
34
43324
4
43334343
2
4
33
432
4
433
3232
43243
1
33
4444
4444
bAMbbbb
bbbbbbbbV
bbbbb
bbbbbbbbbbbV
SS −=
−++++
+
++−+++−++
∑ (5.35)
Dacă se multiplică ecuaţia (5.33) cu
+−32
433bb
)bb( şi se adună cu ecuaţia
(5.35), eliminăm pe V2 şi rezultă reacţiunea V1:( )
( ) ( )432433
443
34
232
43
21 750
4513
1bbbbb,b
MbbAb,A
bbbb
bV
SSS
+++
+−+
=∑
!
(5.36)
Înlocuind pe V1 în relaţia (5.22) vom obţine reacţiunea V2:

67
13
2
3
2332
22 1326 V
bb
bb
bbAV S ⋅
+
+−= (5.37)
Înlocuind V1 şi V2 în relaţia (5.26) obţinem reacţiunea V3:
( ) ( )[ ]∑ ++−+−= 143224334
3
1 VbbbVbbMb
V S
!(5.38)
Înlocuind în relaţia (5.25) pe V1 , V2 şi V3 obţinem:
∑ −−−↓= 3214 VVVZV S (5.39)
5.3. Grinda continuă încastrată la un capăt şi situată pe un reazempunctual la acelaşi nivel cu axa barei (I+R)Modelul matematic folosit este prezentat în fig. 5.8: o bară dreaptă de secţiune
constantă pe lungimea sa, încastrată la un capăt şi situată pe un reazem punctual laacelaşi nivel cu încastrarea care este supusă la înconvoiere simplă prin acţiunea unorsarcini cunocute ca module, direcţii si poziţii pe bară, astfel:• două forţele concentrate P1, P2, acţionând normal pe axa barei în planul principal,
la distanţele d1 şi d2 de capătul barei;• două sarcini uniform distribuite q1, q 2 cunocute ca module, direcţii si poziţii pe
bară, acţionând normal pe axa barei în planul principal• două momente concentrate după axa Oy: N1, N2 cunoscute ca sens şi module.• trei reacţiuni din încastrare şi reazemul punctual rigid cu care bara este legată de
mediul fix, sub forma forţelor V0, V1 şi a momentului din încastrare M0, cunoscuteca direcţii si poziţie pe bară, dar necunoscute ca module.
c
V1d1
d2
b1
V0
M0
g1g2
e1f1
e2f2
N1 N2 P1 P2 q1 q2
Fig. 5.8

68
Pentru determinarea celor trei reacţiuni (M0, V0, V1) se folosesc două ecuaţiide echilibru din Mecanică şi o ecuaţie de deformaţii:
10 VVZs +=Σ↓ (5.40)
1001 bVMM s +=Σ!
(5.41)
062
310
210
11 =−−Φ= bVbMEIw s (5.42)
Din relaţia (5.41) rezultă M0:
1010 bVMM s −Σ=!
(5.43)
Înlocuind pe M0 în relaţia (5.42) rezultă:
( )
0622
06231
31
0
211
1
310
21101
1
=
−+Σ−Φ
=−−Σ−Φ
bbVbM
sau;bVbbVM
ss
ss
!
!
(5.44)
De unde rezultă reacţiunea V0:
Φ−Σ= 21
11
10 2
3b
Mb
V ss
!
(5.45)
Înlocuind pe V0 în ecuaţia (5.42) rezultă M0 :
23 1
21
10
ss Mb
M!
Σ−Φ= (5.46)
Din ecuaţia (5.40) se determina reacţiunea V1:
Φ−−Σ=↓ ∑21
11
11 2
3b
Mb
ZV sss
!
(5.47)
5.4. Grinda continuă încastrată la un capăt şi situată pe două reazemepunctuale la acelaşi nivel cu axa barei (I+2R).Modelul matematic folosit este prezentat în fig. 5.9: o grindă continuă
încastrată la un capăt şi situată pe două reazeme punctuale la acelaşi nivel cuîncastrarea, care este supusă la înconvoiere simplă prin acţiunea unor sarcinicunocute ca module, direcţii si poziţii pe bară, astfel:! două forţele concentrate P1, P2, acţionând normal pe axa barei în planul principal,
la distanţele d1 şi d2 de capătul barei;! două sarcini uniform distribuite q1, q 2 cunocute ca module, direcţii si poziţii pe
bară, acţionând normal pe axa barei în planul principal

69
! două momente concentrate după axa Oy: N1, N2 cunoscute ca sens şi module.! patru reacţiuni din încastrare şi reazemele punctuale rigide cu care bara este legată
de mediul fix, sub forma forţelor V0, V1, V2, şi a momentului din încastrare M0 ,cunoscute ca direcţii si poziţie pe bară, dar necunoscute ca module.
Pentru determinarea celor trei reacţiuni M0, V0, V1 se folosesc două ecuaţii deechilibru din Mecanică şi următoarele două ecuaţii de deformaţii:
210 VVVZs ++↓=Σ (5.48)
2121002 bV)bb(VMM s +++=Σ!
(5.49)
062
310
210
11 =−−Φ=ΕΙ bVbMw s (5.50)
( ) ( ) 0662
321
3210
2210
22 =−+−+−Φ=ΕΙ bVbbVbbMw s (5.51)
Din relatia (5.50) rezulta V0 în funcţie de M0 iar din relatia (5.49) rezultă V1 înfuncţie de M0 şi V0:
−Φ= 02
1
1
10 361 M
bbV s (5.52)
( )[ ]210021
1
1 bbVMMb
V s +−−Σ=!
(5.53)
Înlocuind pe V0 si pe V1 în relaţia (5.51) rezultă:
( ) ( )( ) ( )( ) 0
62
6623
2 2
22
212121
1222121
221
02 =Σ−++Φ
−
−
++−
+−Φ s
ss M
bbbbb
bbbbbbbb
M!
(5.54)
Din relaţia (5.54) rezultă M0:
M0
V1d1
d2
b2
V0
g1g2
e1f1
e2f2
N1 N2 P1 P2 q1 q2
Fig. 5.7
c b1
V2

70
Φ−Σ+
++Φ
+=
2
22
2
2
1
1
2
1
1
210 6
2343
6b
Mbbb
bb
bbbM s
ss
!(5.55)
Se înlocuieşte M0 în expresia (41) şi rezultă V0:
Φ−Σ+
++Φ
+−Φ=
2
22
2
2
1
1
2
1
1
21131
10 6
2343
186b
Mbbb
bb
b)bb(bbV s
sss
!(5.56)
Se inlocuieşte M0 şi V0 în expresia (5.53) şi rezultă V1:
( )[ ]210021
1
1 bbVMMb
V s +−−Σ=!
(5.57)
Se înlocuieşte V0 şi V1 în expresia (5.48) şi rezultă V2:102 VVZV s −−↓Σ= (5.58)
5.5. Grinda continuă încastrată la ambele capete fără reazem intermediar (2I) Modelul matematic folosit este prezentat în fig. 5.9: o grindă continuă încastrată laun capăt şi situată pe două reazeme punctuale la acelaşi nivel cu încastrarea, careeste supusă la înconvoiere simplă prin acţiunea unor sarcini cunocute ca module,direcţii si poziţii pe bară, astfel:• două forţele concentrate P1, P2, acţionând normal pe axa barei în planul principal,
la distanţele d1 şi d2 de capătul barei;• două sarcini uniform distribuite q1, q 2 cunocute ca module, direcţii si poziţii pe
bară, acţionând normal pe axa barei în planul principal• două momente concentrate după axa Oy: N1, N2 cunoscute ca sens şi module.• patru reacţiuni din încastrările cu care bara este legată de mediul fix, sub forma
forţelor din încastrări V0, V1 şi a momentelor M0 , M1 cunoscute ca direcţii sipoziţie pe bară, dar necunoscute ca module.
M0
V0
L
d1d2
g1g2
e1f1
e2f2
N1 N2 P1 P2 q1 q2
Fig. 5.9
M1
V1

71
Pentru rezolvarea sistemului de două ori static nedeterminat se aplică ecuaţiilede echilibru din Mecanică:
10 VVZs +↓=Σ (5.59)
10011 bVMMM s ++=Σ!
(5.60)
şi următoarele două ecuaţii de deformaţii:
62
03
02
011
LVLMEIw s −−Φ== (5.61)
210
200
11
LVLM'EI s −−Φ==ϕ (5.62)
Din ecuaţiile (5.61) şi (5.62) rezultă reacţiunile V0 şi M0:
Φ−Φ=
L'
LV s
s1
120
26 (5.63)
Φ−Φ= s
s 'LL
M 11
0
32 (5.64)
Din relaţiile (5.59) şi (5.60) rezultă reacţiunile V1 şi respectiv M1:
Φ−Φ−↓Σ=
L'
LZV s
ss1
121
26 (5.65)
21
111
64L
'L
MM sss
Φ+Φ−= ∑!
(5.66)
5.6. Grinda continuă încastrată la ambele capete cu un reazemintermediar punctual rigid la acelaşi nivel cu axa barei (2I+R).Modelul matematic folosit este prezentat în fig. 5.10: o grindă continuă
încastrată la un capăt şi situată pe două reazeme punctuale la acelaşi nivel cuîncastrarea, care este supusă la înconvoiere simplă prin acţiunea unor sarcinicunocute ca module, direcţii si poziţii pe bară, astfel:! două forţele concentrate P1, P2, acţionând normal pe axa barei în planul principal,
la distanţele d1 şi d2 de capătul barei;! două sarcini uniform distribuite q1, q 2 cunocute ca module, direcţii si poziţii pe
bară, acţionând normal pe axa barei în planul principal! două momente concentrate după axa Oy: N1, N2 cunoscute ca sens şi module.! patru reacţiuni din încastrările cu care bara este legată de mediul fix, sub forma
forţelor concentrate din încastrări V0, V1, şi a momentelor M0 , M1 cunoscute cadirecţii si poziţie pe bară, dar necunoscute ca module.
Pentru rezolvarea sistemului de două ori static nedeterminat se aplică ecuaţiilede echilibru din Mecanică:

72
210 VVVZs ++↓=Σ (5.67)
21210202 bV)bb(VMMM s ++++=Σ!
(5.68)
precum şi următoarele trei ecuaţii evidente de deformaţii:
620
310
210
11
bVbMEIw s −−Φ== (5.69)
6620
321
3210
2210
22
bV)bb(V)bb(MEIw s −+−+−Φ== (5.70)
2210
221
2210210
22
bV)bb(V)bb(M'EI s −+−+−Φ==ϕ (5.71)
Din ecuaţia (5.71) rezultă M0 în funcţie de V0:
)bV(b
M s31012
10 6
31 −Φ= (5.72)
Se introduce această valoare în ecuaţiile (5.69) şi (5.70) şi rezultă :
+−+Φ−Φ= 2
212021
2211
232
1
661 )bb(bVb
)bb(b
V ss (5.73)
[ ]
∑∑
−+−−=
−−↓=
+−+−Φ=
+Φ++
Φ++
Φ−Φ=
+Φ−+
Φ−+
Φ=
21210022
102
02
21021222
1
221
121
21
2
212
221
10
221
121
21
2
212
2
10
221
332
333
bV)bb(VMMM
;VVZV
;V)bb(M)bb('b
V
bb)bb(
)bb('
)bb(bbM
bb)bb(
)bb('
)bb(bbV
s
s
s
ssss
sss
!
5.74)
V1d1
d2
b2
V0
M0
g1g2
e1f1
e2f2
N1 N2 P1 P2 q1 q2
Fig. 5.10
b1
V2
M2

73
CAPITOLUL VIINTINDEREA ŞI COMPRESIUNEA
BARELOR DREPTE
6.1 GeneralităţiDacă asupra unei bare drepte se aplică un sistem de forţe pe direcţia axei,
atunci o porţiune a barei este solicitată la întindere când eforturile axiale sunt pozitiveşi ea îşi măreşte lungimea (se lungeşte) şi este solicitată la compresiune atunci cândeforturile axiale sunt pozitive şi ea îşi micşorează lungimea (se scurtează) .
Într-o secţiune transversală a barei efortul axial pe faţa negativă (din dreapta,corespunzătoare sensului de parcurgere al barei acelaşi cu sensul axei Ox) secalculează ca suma tuturor forţelor axiale ce acţionează asupra părţii din stânga, iarpe faţa pozitivă (din stânga, corespunzătoare sensului de parcurgere al barei opussensului axei Ox) se calculează ca suma tuturor forţelor axiale ce acţionează asuprapărţii din dreapta. Diagrama de eforturi axiale reprezinta variaţia eforturilor N pelungimea barei: N = N(x), aşa cum este reprezentată diagrama din fig. 6.2 pentrucazul barei prezentate în fig. 6.1
Se observă că forma diagramei de eforturi nu depinde de secţiunea barei şi nicide sensul de parcurgere al ei. Pe tronsonul 0-1 eforturile din bară sunt pozitive (N>0),deci pe această porţiune bara este supusă la întindere, iar pe tronsoanele 1-2, 2-3, 3-4eforturile din bară sunt negative (N<0) deci bara este supusă la compresiune.
x
-
+2P
-P
-3P
-4PDiagrama N
Fig.6.2
3P 2P P
A3A4A
3a2aa0,5a
Fig.6.1
2A
0 41 2 3
4PH0
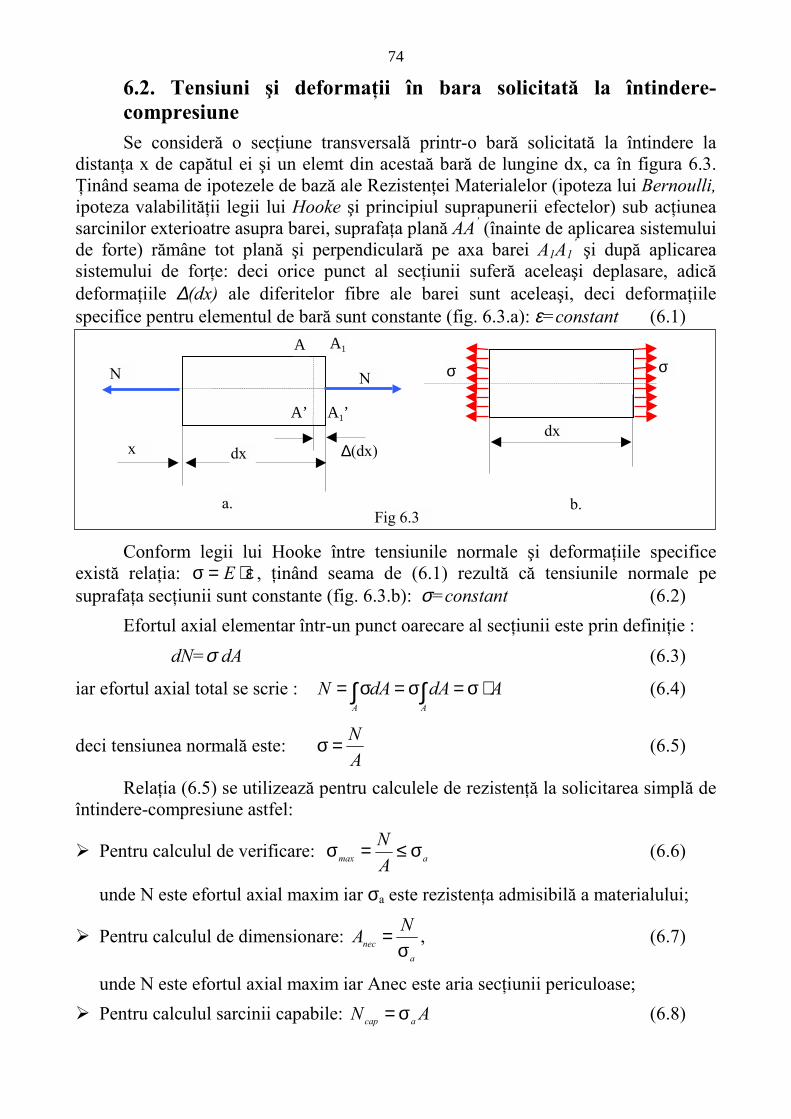
74
6.2. Tensiuni şi deformaţii în bara solicitată la întindere-compresiuneSe consideră o secţiune transversală printr-o bară solicitată la întindere la
distanţa x de capătul ei şi un elemt din acestaă bară de lungine dx, ca în figura 6.3.Ţinând seama de ipotezele de bază ale Rezistenţei Materialelor (ipoteza lui Bernoulli,ipoteza valabilităţii legii lui Hooke şi principiul suprapunerii efectelor) sub acţiuneasarcinilor exterioatre asupra barei, suprafaţa plană AA’ (înainte de aplicarea sistemuluide forte) rămâne tot plană şi perpendiculară pe axa barei A1A1
’ şi după aplicareasistemului de forţe: deci orice punct al secţiunii suferă aceleaşi deplasare, adicădeformaţiile ∆(dx) ale diferitelor fibre ale barei sunt aceleaşi, deci deformaţiilespecifice pentru elementul de bară sunt constante (fig. 6.3.a): ε=constant (6.1)
Conform legii lui Hooke între tensiunile normale şi deformaţiile specificeexistă relaţia: ε⋅=σ E , ţinând seama de (6.1) rezultă că tensiunile normale pesuprafaţa secţiunii sunt constante (fig. 6.3.b): σ=constant (6.2)
Efortul axial elementar într-un punct oarecare al secţiunii este prin definiţie : dN=σ dA (6.3)
iar efortul axial total se scrie : ∫∫ ⋅σ=σ=σ=AA
AdAdAN (6.4)
deci tensiunea normală este: AN=σ (6.5)
Relaţia (6.5) se utilizează pentru calculele de rezistenţă la solicitarea simplă deîntindere-compresiune astfel:
! Pentru calculul de verificare: amax AN σ≤=σ (6.6)
unde N este efortul axial maxim iar σa este rezistenţa admisibilă a materialului;
! Pentru calculul de dimensionare: a
nec
NAσ
= , (6.7)
unde N este efortul axial maxim iar Anec este aria secţiunii periculoase;! Pentru calculul sarcinii capabile: AN acap σ= (6.8)
Fig 6.3
N
x dx
N
∆(dx)
σ
A
A’ A1’
A1
dx
σ
a. b.

75
Pentru exemplul considerat în fig. 6.1, în tabelul 6.1 avem valorile tensiuniipentru fiecare tronson (se consideră cunoscute valorile forţei P şi ale secţiunii A)
Tabelul 6.1Tronson 0-1 1-2 2-3 3-4Efortul N 2P -P -3P -4P
Ariasecţiunii
4A 3A 2A A
σσσσ P/2A -P/3A -3P/2A -4P/ATipul desolicitare
întindere compresiune compresiune compresiune
Rezultă că valoarea maximă a tensiunii este pe tronsonul 3-4 :
AP
AP
max
44 =−=σ (6.9)
6.3. Deformaţii şi deplasăriPentru calculul deformaţiei totale a unei bare supuse la întindere - compresiune
am văzut că elementul de lungime dx (infinit mic) pe feţele căruia acţioneazăeforturile axiale N suferă deformaţia ∆(dx) (fig 6.3.a.) care se scrie: dx)dx( ⋅ε=∆ (6.10)
deoarece Eσ=ε (conform legii lui Hooke) şi
AN=σ conform relaţiei (6.5), rezultă că
deformaţia elemnului dx în funcţie de efortul axial N se scrie astfel:
( )EA
dxNdxdx ⋅=⋅ε=∆ (6.11)
Deformaţia totală a barei este suma integrală a acestor deformaţii elementare:
∫ ∫∫ =ε=∆=∆! !!
dxEANdx)dx(L (6.12)
unde EA se numeşte rigiditatea la întindere/compresiune a barei.Pentru exemplul considerat în fig. 6.1, pentru fiecare tronson
avem: EA/N =const şi relaţia 6.12 se poate scrie pentru fiecare porţiune astfel:
i
ii
i
ii EA
NdxEAN
i
!!
!
==∆ ∫ (6.13)
Deformaţia totală a barei este suma deformaţiilor corespunzătoare fiecărui tronson:
∑=
⋅=∆4
1i i
ii
EAN !
! (6.14)

76
În tabelul 6.2 sunt date valorile acestor deformaţii pentru exemplul din fig. 6.1:Tabelul 6.2
Tronson 0-1 1-2 2-3 3-4Efortul N 2P -P -3P -4PRigiditateatronsonului
4EA 3EA 2EA EA
Deformaţia
tronsonuluiPa/4EA -Pa/3EA -3Pa/EA -12Pa/EA
Deformaţia
Totală a barei-181Pa/12EA
6.4. Energia potenţială de deformaţie la solicitarea de întindere - compresiunePresupunem că asupra capătului liber al unei bare se aplică progresiv o forţă
axială până atinge valoarea maximă P (fig. 6.4.a); bara suferă deformaţii ce variazăliniar cu creşterea forţei ca în figura 6.4.b.
Punctul de aplicaţie al forţei se deplasează cu ∆L, deci forţa efectuează lucrumecanic care se acumulează integral sub formă de energie de deformaţie elastică abarei. Lucrul mecanic total al forţei aplicate progresiv se scrie astfel:
∫∆
=!
0
FduL (6.15)
Relaţia liniară dintre forţa F (aplicată progresiv asupra barei) şi deformaţia ucorespunzătoare acestei forţe se scrie:
uP)u(F ⋅∆
=!
(6.15)
Relaţia (6.15) se scrie deci:
2000
!
!!
!!! ∆=∆
=⋅∆
== ∫∫∫∆∆∆ PuduPduuPFduL (6.16)
F
duO
P
u∆!b.Fig 6.4
a.
P
∆!
NNdx

77
Se observă că lucrul mecanic efectuat de forţa F este egal cu aria cuprinsă subdiagrama de variaţie a forţei aplicate progresiv: F=F(u)
Dacă în locul barei de lungime ! se consideră elemntul de lungime dx şi înlocul forţei P efortul N pe feţele acestui element se poate scrie analog lucrul mecanicelementar corespunzător acestui element sub forma:
( )
( )( )
( )( ) ( )
EAdxNdxNudu
dxNduu
dxNFdudL
dxdxdx
22
2
000
⋅=∆=∆
=⋅∆
== ∫∫∫∆∆∆
(6.17)
Lucrul mecanic total se transformă în energie potenţială de deformaţie elasticăa barei şi se scrie:
∫∫ ===!!
0
2
0 2EAdxNdLUL (6.18)
Ţinînd sema de expresia tensiunii şi deformaţiei specifice de mai sus se poateexprima energia potenţială specifică U1 ca raportul dintre energia potenţială dUcorespunzătoare elementului de lungime dx şi volumul acestui element:
222
1 21
21
211
2σ=ε⋅=ε⋅σ=⋅==
EE
AdxEAdxN
dVdUU (6.19)
Pentru exemplul considerat în fig. 6.1 energia potenţială totală (6.18) se scrie:
EAaP
AEaP
AEaP
AEaP
AEa,Pdx
EANUL
22222
0
2
12347
2316
2229
3242504
2=
⋅+
⋅+
⋅+
⋅⋅=== ∫
!
(6.20)
sau ţinând seama de relaţia (6.19) obţinem acelaşi rezultat: (6.21)
EAaP
APAa
APAa
APAa
APAa,
EV
EU ii
2
2
2
2
2
2
2
2
22
12347163
4922
93
4450
21
21 =
⋅⋅+⋅⋅+⋅⋅+⋅⋅=
σ= ∑
6.5. Probleme static nedeterminate de întindere şi compresiune6.5.1. Dilatarea impiedicatăa) Dilatarea impiedicată fără joc (fig. 6.5.a.)Se consideră o bară de lungime L şi secţiune constantă A fixată între doi suporţi
rigizi care este încălzită uniform astfel încât temperatura creşte de la t1 la t2. Secunosc: modulul de elasticitate E şi coeficientul de dilatare termică α al materialului.Dorim să determinăm forţa axială P ce ia naştere în bară
Fig 6.5
P
∆LL
a.
P
∆L
L
b.δ
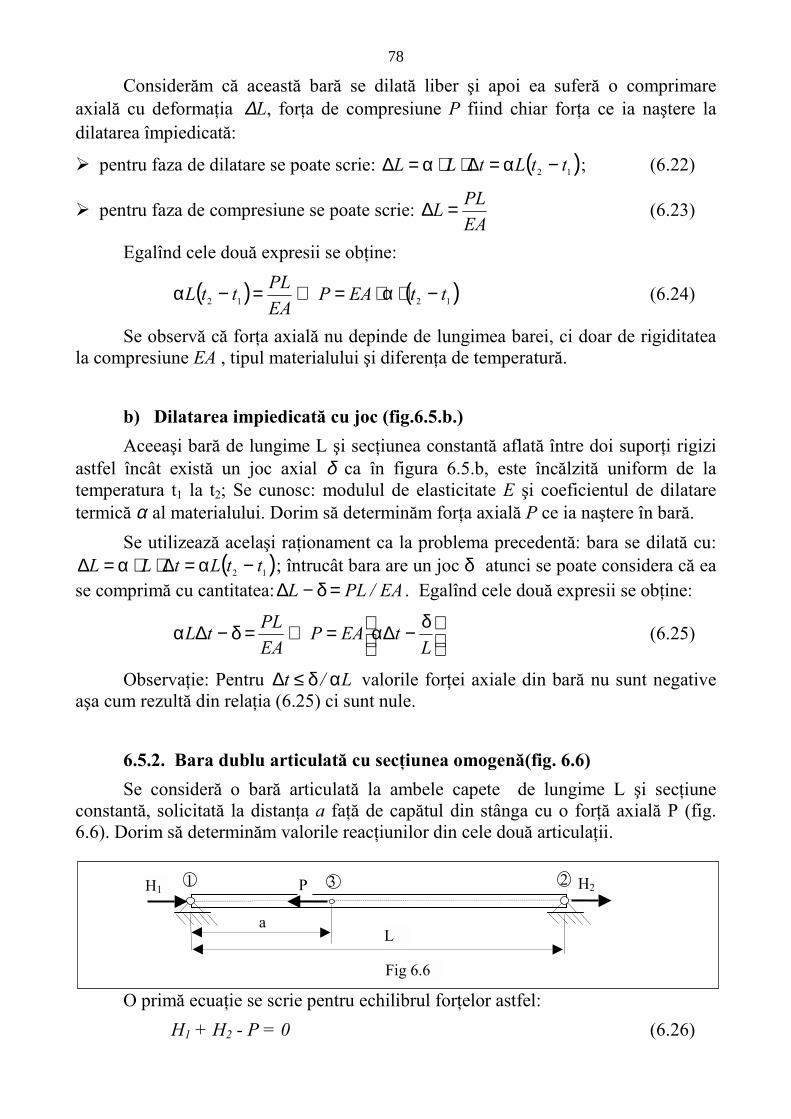
78
Considerăm că această bară se dilată liber şi apoi ea suferă o comprimareaxială cu deformaţia ∆L, forţa de compresiune P fiind chiar forţa ce ia naştere ladilatarea împiedicată:
! pentru faza de dilatare se poate scrie: ( )12 ttLtLL −α=∆⋅⋅α=∆ ; (6.22)
! pentru faza de compresiune se poate scrie: EAPLL =∆ (6.23)
Egalînd cele două expresii se obţine:
( ) ( )1212 ttEAPEAPLttL −⋅α⋅=⇒=−α (6.24)
Se observă că forţa axială nu depinde de lungimea barei, ci doar de rigiditateala compresiune EA , tipul materialului şi diferenţa de temperatură.
b) Dilatarea impiedicată cu joc (fig.6.5.b.)Aceeaşi bară de lungime L şi secţiunea constantă aflată între doi suporţi rigizi
astfel încât există un joc axial δ ca în figura 6.5.b, este încălzită uniform de latemperatura t1 la t2; Se cunosc: modulul de elasticitate E şi coeficientul de dilataretermică α al materialului. Dorim să determinăm forţa axială P ce ia naştere în bară.
Se utilizează acelaşi raţionament ca la problema precedentă: bara se dilată cu:( )12 ttLtLL −α=∆⋅⋅α=∆ ; întrucât bara are un joc δ atunci se poate considera că ea
se comprimă cu cantitatea: EA/PLL =δ−∆ . Egalînd cele două expresii se obţine:
δ−∆α=⇒=δ−∆α
LtEAP
EAPLtL (6.25)
Observaţie: Pentru L/t αδ≤∆ valorile forţei axiale din bară nu sunt negativeaşa cum rezultă din relaţia (6.25) ci sunt nule.
6.5.2. Bara dublu articulată cu secţiunea omogenă(fig. 6.6)Se consideră o bară articulată la ambele capete de lungime L şi secţiune
constantă, solicitată la distanţa a faţă de capătul din stânga cu o forţă axială P (fig.6.6). Dorim să determinăm valorile reacţiunilor din cele două articulaţii.
O primă ecuaţie se scrie pentru echilibrul forţelor astfel:H1 + H2 - P = 0 (6.26)
Fig 6.6
P
La
1 2H1 H23

79
A doua ecuaţie se obţine din condiţia ca deformaţia totală a barei să fie nulă:
∫=∆=L EA
NdxL0 ; (6.27)
Eforturile axiale pe cele două tronsoane ale barei se scriu:N13 = - H1 ; N32 = -H1 + P (6.28)
deci relaţia (6.26) se scrie:
( )
)aL(EA
PHaEA
aH
dx)PH(EA
dxHEA
L
a
a
−⋅+−+⋅−=
+−+−= ∫∫
11
10
1
0
110(6.29)
Rezultă:LaPH;
LaPH ⋅=
−= 21 1 (6.30)
6.5.3. Bara de secţiune neomogenă solicitată la compresiune (fig. 6.7)Se consideră o piesă de lungime L (mm) şi secţiune neomogenă formată din trei
piese din materiale diferite (de exemplu două tuburi din aluminu şi cupru şi uncilindru din oţel), solicitată la compresiune cu o forţă axială P (fig. 6.6). Dorim sădeterminăm valorile forţelor preluate de cele trei piese având rigidităţile lacompresiune respectiv E1A1, E2A2 şi E3A3 , iar tubul interior este mai scurt decâttubul exterior cu δ şi bolţul interior mai lung decât tubul exterior cu δ (mm).
O primă ecuaţie se scrie pentru echilibrulforţelor astfel:N1 + N2+ N3 - P = 0 (6.26) A doua ecuaţie se obţine din condiţia căîntre deformaţiile celor două perechi depiese există relaţiile:
δ+∆=∆δ−∆=∆
23
12
LLLL
; (6.27)
Deformaţiile celor trei piese se scriu:
33
33
22
22
11
1
11
11 AE
LNL;AELNL;
AELN
AEdxNL
L
=∆=∆==∆ ∫ (6.28)
Introducând aceste relaţii în ecuaţiile (6.27) se obţine:
δ+=δ−=22
2
33
3
22
2
11
1
AELN
AELN;
AELN
AELN (6.29)
Rezultă un sistem de trei ecuaţii (6.26) şi (6.29) din care se obţin valorileforţelor axiale N1, N2 şi N3 ale celor trei piese.
Fig 6.7
P
L
δE1A1
E3A3
δ
E2A2

80
6.5.4. Sistem plan de bare paralele (fig. 6.8)Se consideră un sistem format din 4 bare având aceeaşi lungime L şi rigidităţile
la întindere - compresiune: E1A1, E2A2, E3A3, respectiv E4A4, fixate la unul din capetede un perete fix iar la celălalt capăt de o bară rigidă de lungime 5a ca în fig. 6.8. Lacapătul barei rigide acţionează o forţă P. Dorim să determinăm forţele axiale pe carele preiau cele 4 bare. Se pot scrie numai două ecuaţii de echilibru din Mecanică:
V + N1 + N2 + N3 + N4 - P = 0 (6.30)N1 ⋅a + N2 ⋅2a + N3 ⋅3a + N4 ⋅4a - P⋅5a=0 (6.31)
Avem 5 necunoscute : V, N1, N2, N3 şi N4 .Celelalte trei ecuaţii rezultă dincondiţiile de deformaţii şi se pot scrie ţinând seama de asemănarea unor triunghiuri
din fig. 6.8: aL
aL
aL
aL
4324321 ∆=∆=∆=∆ (6.32)
Deformaţiile celor 4 bare se scriu:
;AELNL;
AELNL;
AELNL;
AELNL
22
44
33
33
22
22
11
11 =∆=∆=∆=∆ (6.33)
Înlocuind în relaţiile (6.32) se obţine:
O
E2A2
P
a
Fig.6.8.
a a a a
E1A1 E3A3E4A4
∆L1 ∆L2∆L4
∆L3
V
P
N4N3N2
N1
a
a a a a
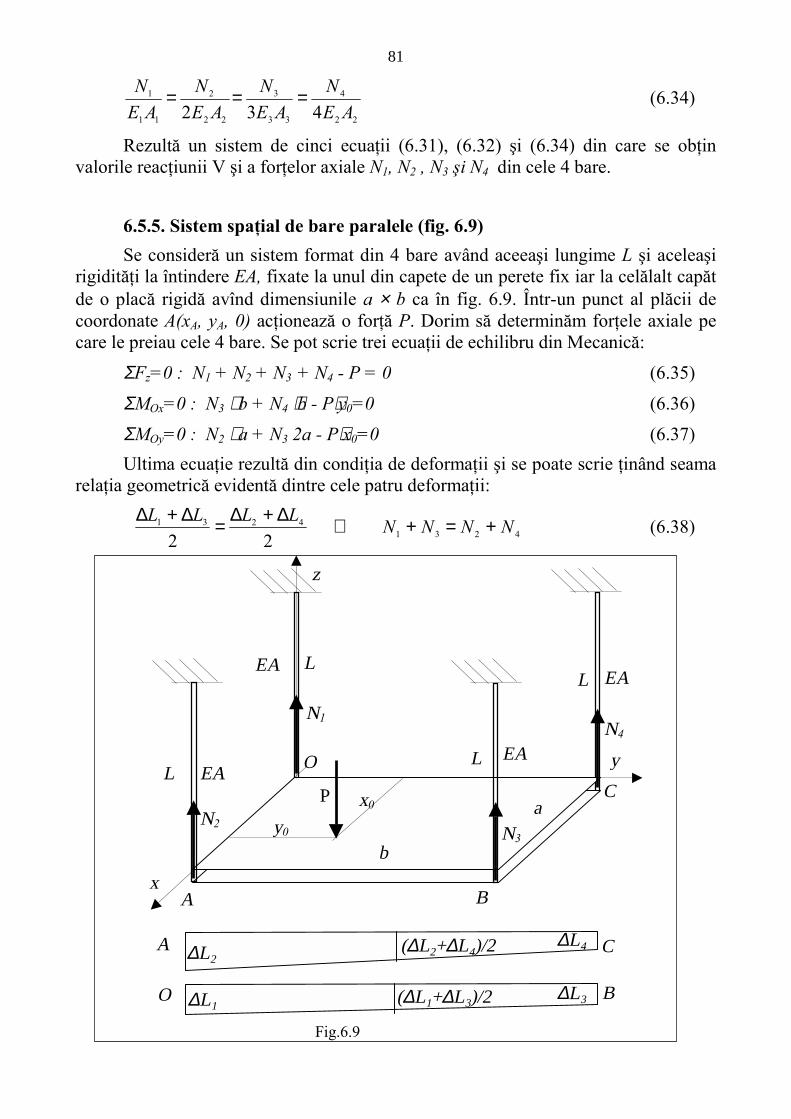
81
22
4
33
3
22
2
11
1
432 AEN
AEN
AEN
AEN === (6.34)
Rezultă un sistem de cinci ecuaţii (6.31), (6.32) şi (6.34) din care se obţinvalorile reacţiunii V şi a forţelor axiale N1, N2 , N3 şi N4 din cele 4 bare.
6.5.5. Sistem spaţial de bare paralele (fig. 6.9)Se consideră un sistem format din 4 bare având aceeaşi lungime L şi aceleaşi
rigidităţi la întindere EA, fixate la unul din capete de un perete fix iar la celălalt capătde o placă rigidă avînd dimensiunile a × b ca în fig. 6.9. Într-un punct al plăcii decoordonate A(xA, yA, 0) acţionează o forţă P. Dorim să determinăm forţele axiale pecare le preiau cele 4 bare. Se pot scrie trei ecuaţii de echilibru din Mecanică:
ΣFz=0 : N1 + N2 + N3 + N4 - P = 0 (6.35)
ΣMOx=0 : N3 ⋅ b + N4 ⋅b - P⋅y0=0 (6.36)ΣMOy=0 : N2 ⋅ a + N3 2a - P⋅x0=0 (6.37)Ultima ecuaţie rezultă din condiţia de deformaţii şi se poate scrie ţinând seama
relaţia geometrică evidentă dintre cele patru deformaţii:
42314231
22NNNNLLLL +=+⇔∆+∆=∆+∆ (6.38)
O
Fig.6.9
EA
Lx0
y0
a
b
P
x
y
z
L
L
L
EA
EA
EA
N1
N2N3
N4
A B
C
A C
O B
∆L2
∆L4
∆L3∆L1
(∆L2+∆L4)/2
(∆L1+∆L3)/2

82

83
CAPITOLUL VIIRĂSUCIREA BARELOR DREPTE
DE SECŢIUNE CIRCULARĂ ŞI INELARĂ
7.1. GeneralităţiAceastă solicitare este specifică barelor de torsiune, arborilor, arcurilor, etc.
Pentru un arbore care transmite o putere dată P, având turaţia n (rot/min), cuplul saumomentul de răsucire Mt, se calculează cu ajutorul relaţiei cunoscută din Mecanică:
Mt = P/ω (7.1)
unde: ω=2π n este viteza unghiulară a arborelui.În Sistemul Internaţional de unităţi de măsură mărimile din relaţia (7.1) au
dimensiunile: [Mt]SI= Nm; [P]SI= W=Nms-1; [ω]SI= s-1; (7.2)Ţinând seama de unităţile de măsură utilizate curent în calculele inginereşti: [Mt] = Nm; [P]= kW; [ω]= min-1; ([n]= rot/min) (7.3)
relaţia (7.1) devine: nP,
nP
nPM t ⋅=⋅
π=π
⋅= 3954930000
602103
(7.4)
Pentru un arbore de secţiune circulară sau inelară efortul de răsucire (torsional)pe faţa negativă (din dreapta, corespunzătoare sensului de parcurgere al barei acelaşicu sensul axei Ox) se calculează ca sumă a tuturor momentelor axiale Mtx ceacţionează asupra părţii din stânga, iar pe faţa pozitivă (din stânga, corespunzătoaresensului de parcurgere al barei opus sensului axei Ox), ca suma tuturor momenteloraxiale Mtx ce acţionează asupra părţii din dreapta, cu respectarea convenţiei de semne.
Diagrama de eforturi de răsucire reprezintă deci variaţia eforturilor Mt pelungimea barei: Mt= Mt(x) . În fig. 7.1 şi 7.2 sunt prezentate două exemple practice dediagrame de eforturi.
Mt2
Mt1
Mt3Mt4
zx
Fig. 7.1
-
+Mt2
Mt3+ Mt4
Mt4Diagrama Mt
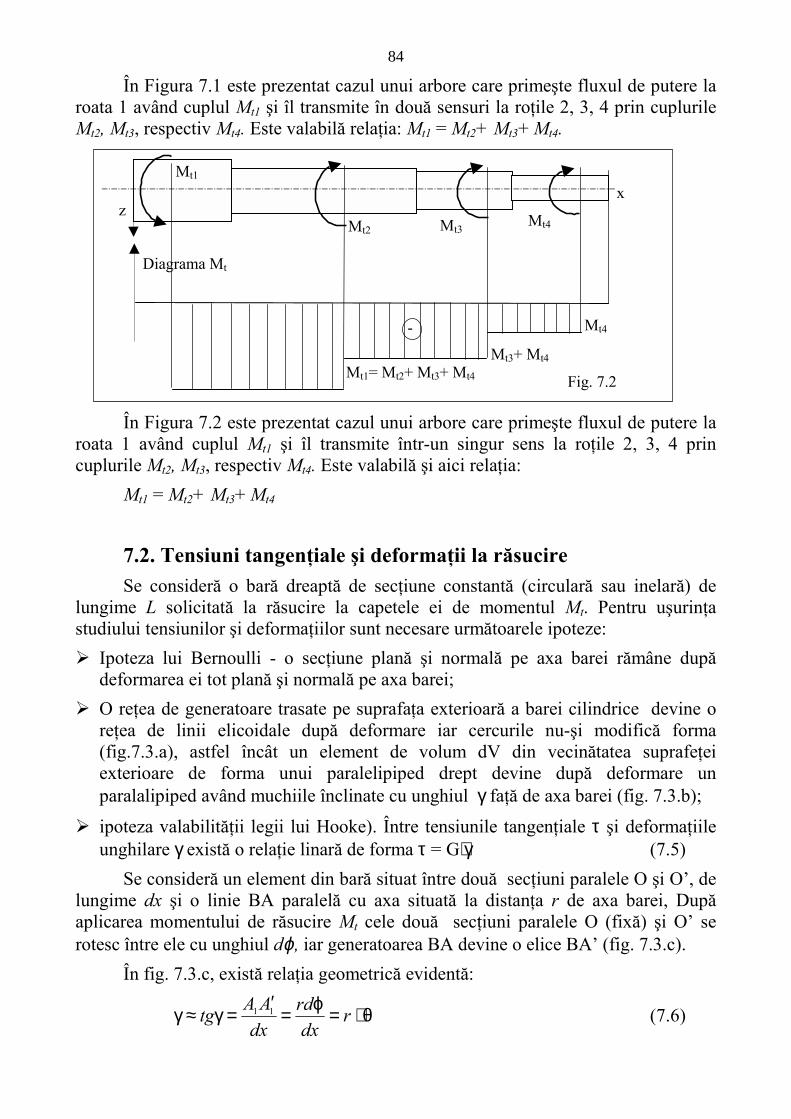
84
În Figura 7.1 este prezentat cazul unui arbore care primeşte fluxul de putere laroata 1 având cuplul Mt1 şi îl transmite în două sensuri la roţile 2, 3, 4 prin cuplurileMt2, Mt3, respectiv Mt4. Este valabilă relaţia: Mt1 = Mt2+ Mt3+ Mt4.
În Figura 7.2 este prezentat cazul unui arbore care primeşte fluxul de putere laroata 1 având cuplul Mt1 şi îl transmite într-un singur sens la roţile 2, 3, 4 princuplurile Mt2, Mt3, respectiv Mt4. Este valabilă şi aici relaţia:
Mt1 = Mt2+ Mt3+ Mt4
7.2. Tensiuni tangenţiale şi deformaţii la răsucireSe consideră o bară dreaptă de secţiune constantă (circulară sau inelară) de
lungime L solicitată la răsucire la capetele ei de momentul Mt. Pentru uşurinţastudiului tensiunilor şi deformaţiilor sunt necesare următoarele ipoteze:! Ipoteza lui Bernoulli - o secţiune plană şi normală pe axa barei rămâne după
deformarea ei tot plană şi normală pe axa barei;! O reţea de generatoare trasate pe suprafaţa exterioară a barei cilindrice devine o
reţea de linii elicoidale după deformare iar cercurile nu-şi modifică forma(fig.7.3.a), astfel încât un element de volum dV din vecinătatea suprafeţeiexterioare de forma unui paralelipiped drept devine după deformare unparalalipiped având muchiile înclinate cu unghiul γ faţă de axa barei (fig. 7.3.b);
! ipoteza valabilităţii legii lui Hooke). Între tensiunile tangenţiale τ şi deformaţiileunghilare γ există o relaţie linară de forma τ = G⋅γ (7.5)
Se consideră un element din bară situat între două secţiuni paralele O şi O’, delungime dx şi o linie BA paralelă cu axa situată la distanţa r de axa barei, Dupăaplicarea momentului de răsucire Mt cele două secţiuni paralele O (fixă) şi O’ serotesc între ele cu unghiul dϕ, iar generatoarea BA devine o elice BA’ (fig. 7.3.c).
În fig. 7.3.c, există relaţia geometrică evidentă:
θ⋅=ϕ=′
=γ≈γ rdx
rddx
AAtg 11 (7.6)
Mt2
Mt1
Mt3Mt4
zx
Fig. 7.2
-
Mt1= Mt2+ Mt3+ Mt4
Mt3+ Mt4
Mt4
Diagrama Mt

85
unde: dxdϕ=θ este răsucirea specifică (7.7)
γ - lunecare specifică (variaţia ungiului de π/2) (fig. 7.3.b);Relaţia (7.5) dintre tensiuni şi deformaţia unghiulară se scrie:
τ = G⋅θ⋅ r (7.8)Efortul de răsucire Mt este rezultatul însumării momentelor forţelor elementare
dF=τ⋅ dA care apar în secţiunea barei ca urmare a tensiunilor tangenţiale (fig. 7.4):
θ⋅=πθ=π⋅τ⋅=τ⋅=⋅= ∫ ∫∫∫ p
R RR
At GIdrrGrdrrdArdFrM
0 0
3
0
22 (7.9)
Rezultă că răsucirea specifică este direct proporţională cu momentul de
răsucire Mt:p
t
GIM=θ (7.10)
unde GIp este rigiditatea la răsucire a barei.
Relaţia (7.8) devine: rIM
p
t ⋅=τ (7.11)
dV
Fig. 7.3
Mt
ϕ
γ
γmax
rR
dx
a.
Mt
Mt
dV
γ
dx
b.c.
A
A’
B
O’O
Mt
Fig. 7.4
dFτ
τmax Mt
τmax
b.
dFτMt
τmax
a.
τmin
dD

86
Rensiunea tangenţială maximă se obţine pentru r=R:
p
t
p
t
p
tmax W
M
RIM
IM ===τ (7.12)
unde Wp este modulul de rezistenţă polar (la răsucire)! momentul de inerţie şi modulul de rezistenţă polar pentru secţiunea circulară:
162322
342
0
3 D/D
IW;DdrrI p
p
/D
p
π==π=π= ∫ (7.13)
! momentul de inerţie şi modulul de rezistenţă polar pentru secţiunea inelară:
D)dD(
/DI
W;)dD(drrI pp
/D
/dp 16232
244442
2
3 −π==−π=π= ∫ (7.14)
Deformaţii la răsucireRelaţia (7.10) pentru răsucirea specifică se mai scrie:
dxGIMd
GIM
dxd
p
t
p
t ⋅=ϕ⇒=ϕ=θ (7.15)
Integrînd relaţia (7.15) pe lungimea L a barei se obţine unghiul de deformaţietotală al barei ϕ (sau de rotire a secţiunii aflată la distanţa L faţă de secţiunea din
capătul barei): ∫ ⋅=ϕL p
t dxGIM (7.16)
7.3. Energia potenţială de deformaţie la solicitarea de răsucirePresupunem că asupra capătului liber al unei bare se aplică progresiv un
moment axial până atinge valoarea maximă Mt0 (fig. 7.5.a); bara suferă deformaţiiunghiulare ce variază liniar cu creşterea momentului ca în figura 7.5.b. , decimomentul ce se aplică progresiv efectuează lucru mecanic care se presupune căacumulează integral sub formă de energie de deformaţie elastică a barei.
Lucrul mecanic total al momentului aplicat progresiv se scrie astfel:
Fig 7.5
a.
Mt
∆ϕ
dx
Mt Mt0
Mt
dϕO
Mt0
ϕb. ∆ϕ

87
∫ϕ∆
ϕ=0
dML t (7.17)
Relaţia liniară dintre momentul Mt (aplicat progresiv asupra barei) şideformaţia ϕ corespunzătoare acestei forţe se scrie:
ϕ⋅ϕ∆
=ϕ 0tt
M)(M (7.18)
Relaţia (7.17) se scrie deci:
20
0
0
0
0
0
ϕ∆=ϕϕϕ∆
=ϕϕ⋅ϕ∆
=ϕ= ∫∫∫ϕ∆ϕ∆ϕ∆
tttt
MdMdMdML (7.19)
Dacă în locul barei de lungime L se consideră numai elemntul de lungime dx,lucrul mecanic elementar corespunzător acestui element se poate scrie analog:
2ϕ= dMdL t (7.20)
Energia potenţială de deformaţie elastică a barei şi se scrie:
∫==L
p
t
GIdxMLU
0
2
2(7.21)
Ţinînd sema de expresia tensiunii şi lunecării specifice deduse mai sus, sepoate exprima energia potenţială specifică U1 ca raportul dintre energia potenţială dUcorespunzătoare elementului de lungime dx şi volumul acestui element:
221 2
121
21 τ=γ⋅=γ⋅τ==
GG
dVdUU (7.22)
7.4. Calculul arcurilor elicoidale cilindriceArcul elicoidal este o bară curbă în spaţiu având axa geometrică sub forma unei
elice cilindrice (fig. 7.6).
Fig 7.6
α
d
M=PR
P
P
P
R
a. b.
Psinα
Pcosα
Mt=PR cosα
Mi=PR sinα

88
S-au utilizat următoarele notaţii:- R raza de înfăşurare a spirei (raza cilindrului de înfăşurare)- D diammetrul spiei arcului- α unghiul de înclinare al spirelor sub acţiunea forţei axiale P- n numărul total de spire- L=2πRn lungimea totală a spirelor arculuiDin fig. 7.6.b se observă că într-o secţiune a arcului acţionează patru eforturi:
efortul axial Psinα, efortul tăietor Pcosα, momentul încovoietor Mi=PRsin α şimomentul torsional Mt=PR cosα.
Deoarece unghiul α este mic sin α ≅ 0 şi cosα ≅ 1 efortul axial şi momentulîncovoietor se neglijează. Calculul de rezistenţă se face deci la solicitarea de răsucire(principală ) şi de forfecare (secundară):
ap
max AP
WPR τ≤+=τ (7.23)
Pentru calculul săgeţii arcului f (sau a comprimării arcului sub acţiunea forţeiP) se egalează lucrul mecanic al forţei P cu energia potenţială de deformaţie elasticăînmagazinată de arc:
kP
GdnPRf
GILMPfp
t ==⇒= 4
32 6422
(7.24)
unde s-a notat cu nR
Gdk 3
4
64= constanta elastică a arcului (constantă).
Deci între forţa P şi săgeata f există o relaţie liniară care se reprezintă în STASsub forma caracteristicii elastice liniare a arcului.

89
CAPITOLUL VIIISTUDIUL DEPLASĂRILOR PRIN METODE
ENERGETICE
8.1. GeneralităţiÎn cazul solicitărilor corpurilor liniar elastice, se poate considera că lucrul
mecanic produs de forţele exterioare se acumulează integral sub formă de energiepotenţială de deformaţie elastică. Folosind expresiile analitice ale energiei potenţialeîn funcţie de eforturi, tensiuni şi deformaţii se obţin relaţii care pot servi la studiuldeplasărilor şi deformaţiilor, sistemelor statice nedeterminate, vibraţiilor, etc.Metodele de calcul care utilizează expresia energiei potenţiale de deformaţie elasticăse numesc metode energetice.
Expresiile energiei potenţiale de deformaţie în cazul barei drepte scrise înfuncţie de cele patru tiputi de eforturi secţionale ale sunt date în tabelul 8.1:
Tabelul 8.1
Tipul de solicitareÎntindere-
compresiune Încovoiere Forfecare RăsucireEfortul secţional N Mi T Mt
Expresia energieipotenţiale de
deformaţie în funcţie deefort
∫=l
dxEA
NU2
2
∫=l
i
EIdxMU
2
2
∫=l
dxGA
kTU2
2
∫=l p
t dxGIMU
2
2
8.2. Lucrul mecanic al forţelor/cuplurilor exterioareDacă la capetele unei bare drepte acţionează câte o forţă de întindere care
creşte progresiv de la zero la valoarea maximă P (fig.8.1.a), atunci lucrul mecanic alacestei forţe se scrie (vezi paragraful 6.3 şi fig.6.4) astfel:
2000
!
!!
!!! ∆=∆
=⋅∆
== ∫∫∫∆∆∆ PuduPduuPFduL (8.1)
Dacă la capetele barei drepte acţionează câte un moment încovoietor carecreşte progresiv de la zero la valoarea maximă Mo (fig.8.1.b), atunci lucrul mecanical acestei forţe se scrie analog:
20 ϕ∆= ML (8.2)

90
Dacă la capetele unei bare drepte de secţiune circulară acţionează câte unmoment de torsiune care creşte progresiv de la zero la valoarea maximă Mt0 atuncilucrul mecanic al acestei forţe se scrie analog:
20 ψ∆= tML (8.3)
Dacă asupra barei se aplică un al doilea sistem de forţe independent de primulatunci lucrul mecanic al forţelor cuplurilor pe deplasările produse de acest sietm de
forţe /cupluri este: !!!
∆⋅=== ∫∫∆∆
PduPFduL00
la întindere,
respectiv ϕ∆= 0ML la încovoiere şi ψ∆= 0tML la răsucire (8.4)
8.3. Teorema reciprocităţii lucrului mecanic (Betti)Să considerăm că asupra unei bare drepte se aplică două stări succesive de
solicitare. Considerăm că cele două stări de solicitare sunt caracterizate de câte oforţă. Lucrul mecanic total produs de cele două stări succesive de solicitare se vascrie astfel (fig. 8.2):
a. cele două stări se aplică în ordinea 1-2: 22121121 LLLL ++=− (8.5)
b. cele două stări se aplică în ordinea 2-1: 11212212 LLLL ++=− (8.6)
unde: L11 - lucrul mecanic produs de forţele din prima stare pe deplasările
proprii: 11111 21 wFL = ;
L12 - lucrul mecanic produs de forţele din prima stare pe deplasările produse dea doua stare de încărcare: 12112 wFL = ;L22 - lucrul mecanic produs de forţele din a doua stare pe deplasările proprii:
22222 21 wFL = ;
L21 - lucrul mecanic produs de forţele din a doua stare pe deplasările produse deprima stare: 21221 wFL = ;
Deoarece în acest caz (ipoteza de corp liniar elastic) lucrul mecanic seacumulează integral sub formă de energie potenţială de deformaţie elastică, esteevident că această energie potenţială nu depinde de succesiunea aplicării celor douăstări de încărcare, deci vom avea: 21121221 LLLL =⇒= −− (8.7)
Fig. 8.1
P P
a.b.
M0 M0
!∆ ϕ∆

91
Aceasta reprezintă expresia teoremei lui Betti. Enunţul acestei teoreme esteurmătorul: Dacă asupra unui corp elastic se aplică două stări succesive deîncărcare, lucrul mecanic efectuat de forţele/cuplurile din prima stare pe deplasărileproduse de a doua stare este egal cu lucrul mecanic efectuat de forţele/cuplurile dina doua stare pe deplasările produse din prima stare.
8.4. Teorema reciprocităţii deplasărilor (Maxwell)Considerăm că cele două stări de solicitare sunt caracterizate de câte o forţă
având aceeaşi valoare F1=F2=P.
12221121 21
21 PwPwPwL ++=− (8.8)
21112212 21
21 PwPwPwL ++=− (8.9)
Din teorema lui Betti rezultă: 21121221 wwLL =⇒= −− (8.10)
Aceasta reprezintă expresia teoremei reciprocităţii deplasărilor (Maxwell) şiare următorul enunţ: Deplasarea produsă în secţiunea 1 a unei bare când o forţăoarecare P este aplicată în secţiunea 2 este egală cu deplasarea produsă însecţiunea 2 de aceeaşi forţă P care acţioneză în secţiunea 1. Cele două deplasări seconsideră că au direcţia forţelor.
a.
F1 F2
Fig. 8.2
b.
F1 F2
w11 w22
w12
w11 w12
w22

92
8.5. Medoda Mohr-Maxwell pentru calculul deplasărilor8.5.1. Calculul deplasărilor la solicitarea de întindere compresiuneSe consideră o bară dreaptă solicitată axial de cele două stări succesive: prima,
starea de încărcare reală dată, a doua se consideră starea de încărcare cu o forţăunitară aplicată în secţiunea în care dorim să calculăm deplasarea δA corespunzătoarecapătului A al barei .
L21 - lucrul mecanic produs de forţele din a doua stare pe deplasările produse deprima stare este: AL δ⋅=121 (8.11)
L12 - lucrul mecanic produs de forţele din prima stare pe deplasările produse de adoua stare de încărcare;
( ) ∫=⇒=∆⋅=! EA
NndxLEA
NndxdxNdL 1212 (8.12)
unde ( )EAndxdx =∆ este deformaţia elementului dx sub acţiunea forţelor din a
doua stare.Egalând cele două expresii (8.11) şi (8.12) se obţine deplasarea capătului barei
care coincide cu deformaţia totală a barei:
∫=∆=δl
A dxEANn
! (8.13)
care reprezintă expresia matematică a metodei Mohr Maxwell de calcul adeplasărilor la întindere-compresiune
În cazul în care dorim să calculăm deplasarea în altă secţiune, se aplică însecţiunea respectivă o forţă axială egală cu unitatea. Dacă rezulatul obţinut estepozitiv, atunci deplsarea reală coincide ca sens cu sensul forţei unitare aplicate.
8.5.2. Calculul deplasărilor şi rotirilor la solicitarea de încovoiereSe consideră două stări de încărcare a unei bare supusă la încovoiere. Prima:
starea reală de încărcare a barei (fig.8.4.a) iar a doua: starea de încărcarecorespunzătoare unei forţe unitare aplicată în secţiunea dorită, atunci când se doreşte
Fig. 8.3
H 2P
a. Starea 1 de încărcare
3PP h 1
b. Starea 2 de încărcare
dx
N
∆(dx)
N
! δA
dx
n
δ(dx)
n
x x
A A

93
calculul săgeţii (fig.8.4.b) sau cea corespunzătoare unui moment unitar aplicat însecţiunea dorită, atunci când se doreşte calculul rotirii (fig.8.4.c) pe direcţia deplasării(fig. 8.4).
Calculul săgeţii vA . Se calculează:L21 - lucrul mecanic produs de forţele din a doua stare pe deplasările produse de
prima stare este: AwL ⋅=121 (8.14)
L12 - lucrul mecanic produs de forţele din prima stare pe deplasările produse de adoua stare de încărcare;
∫′
=⇒′
=θ⋅=! EI
dxmMLEIdxmMdMdL iii
i 1212 (8.15)
undeEI
dxmd i′=θ este rotirea feţelor elementului dx sub acţiunea forţelor din a
doua stare.Egalând cele două expresii (8.14) şi (8.15) se obţine deplasarea secţiunii A a
barei (săgeata barei în punctul A):
∫′
=! EI
dxmMw iiA (8.16)
Calculul rotirii ϕϕϕϕA . Se calculează analog:L21 - lucrul mecanic produs de cuplul din a doua stare pe deplasările produse de prima
stare este: AL ϕ⋅=121 (8.17)
P=1b. Starea a2a de încărcare
A
dx
dθ
x
m'i m'i
Fig. 8.4
c. Starea a2a de încărcare
N=1
A
dx
dψ
x
m''i m''i
P
wA
a. Starea 1 de încărcareq
NA dx
dϕMi
x
Mi
ϕA

94
L12 - lucrul mecanic produs de forţele /cuplurile din prima stare pe deplasărileproduse cuplul din a doua stare de încărcare este:
∫′′
=⇒′′
=ψ⋅=! EI
dxmMLEI
dxmMdMdL iiii 1212 (8.18)
undeEIdxmd i′′=ψ este rotirea feţelor elementului dx sub acţiunea forţelor din a
doua stare. Egalând cele două expresii (8.17) şi (8.18) se obţine rotirea secţiunii A
∫′′
=ϕ! EI
dxmM iiA (8.19)
În cazul în care se cere deplasarea sau unghiul de rotire din altă secţiune, seaplică în secţiunea respectivă o forţă egală cu unitatea, respectiv un cuplu egal cuunitatea. În cazul barelor supuse la încovoiere se neglijează deformaţiile datorateforţelor axiale sau tăietoare.
8.5.3. Calculul rotirilor la solicitarea de răsucireSe consideră două stări de încărcare ale une bare de secţiune circulară (inelară)
supusă la răsucire: Prima: starea reală de încărcare a barei (fig. 8.5.a) iar a doua,starea de încărcare corespunzătoare unui moment unitar aplicat în secţiunea în caredorim să determinăm rotirea (fig. 8.5.b).
L21 - lucrul mecanic produs de cuplul din a doua stare pe deplasările produse de primastare este: AL ϕ⋅=121 (8.20)
L12 - lucrul mecanic produs de cuplurile de răsucire din prima stare pe deplasărileproduse cuplul din a doua stare de încărcare este:
∫=⇒=ϕ⋅=! p
tt
p
ttt GI
dxmMLGI
dxmMdMdL 1212 (8.21)
undep
t
GIm
dxd =ϕ=θ este rotirea specifică a elementului dx sub acţiunea
cuplurilor axiale din a doua stare. Egalând cele două expresii se obţine
∫′′
=ϕ! EI
dxmM iiA (8.22)
Fig. 8.5
Mt0 2P!
a. Starea 1 de încărcare
3P!P! mt0 Mt=1b. Starea 2 de încărcare
dx
Mt Mt
!
ϕA
dx
mt mt
x x
dϕ

95
8.5.4. AplicaţieAplicarea metodei Mohr Maxwell sub forma de mai sus este destul de laborioasă
datorită expresiilor analitice ale eforturilor pentru cele două stări de încărcare, aşacum rezultă din următorul exemplu din fig. 8.6 relativ simplu pentru care se ceredeplasarea w4 şi rotirea ϕ4 a capătului din dreapta al barei.
Pentru starea 1 de încărcare expresiile momentului pentru fiecare din cele treitronsoane sunt (se consideră originea mobilă pentru fiecare troson):
022222 243213 =
−=−
+== M;xaPPxxaPM;xPM (8.23)
Pentru a doua stare de încărcare (fig. 8.6.b) expresiile momentului pentrufiecare din cele trei tronsoane sunt:
( ) xxam;xam;xm23
21
221
21
243213 ++−=′
+−=′−=′ (8.24)
Pentru a doua stare de încărcare (fig. 8.6.c) expresiile momentului pentrufiecare din cele trei tronsoane sunt:
( ) 1112
1243213 =−+=′′
+=′′=′′ a
axa
am;xa
am;
axm (8.25)
3/2
b. Starea a2a de încărcare
a/2a/2a/2
P=1
-1/2
Pw4
ϕ4
P/2
a. Starea 1 de încărcare
a/2a/2a/2P/2
-1/a
c. Starea a2a de încărcare
a/2a/2a/2
N=1
1/a
1 3 2 4
Fig. 8.6

96
Înlocuind în exresia (8.16) se obţine săgeata w4: (8.26)
∫∫∫ −=
+
−
−+
−⋅=
′=
2
0
32
04 3222
1222
12
1 /a/a
l EIPadxxaxaPdxxxP
EIdx
EImMw
Înlocuind în exresia (8.19) se obţine rotirea ϕ4:
EIPaxa
axaP
axxP
EIdx
EImM
l
/a /a
1621
2221 22
0
2
04 =
+
−+⋅=
′′=ϕ ∫ ∫ ∫ (8.22)
8.6. Metoda lui Vereşceaghin deintegrare grafică a integralelor deforma ∫Mmdx
Pentru calculul integralei ∫Mmdxunde funcţia m(x) este o funcţie liniară,Vereşceaghin a propus o metodă mult mairapidă, metodă grafoanalitică care esteprezentată mai jos. Din fig 8.7 se poatescrie:dA =M(x)dx şi m(x)=xtgα (8.23)deci integrala de la xA la xB devine:
ccy
x
x
x
x
x
x
yAtgxAtgSxdAtg
dAxtgdx)x(m)x(M
B
A
B
A
B
A
=α⋅=α=α=
=α=
∫
∫∫(8.24)
unde : yc reprezintă ordonata corespunzătoare centrului de greutate C al suprafeţeidiagramei M(x) din diagrama m(x);A este aria diagramei M(x) cuprinsă între xA şi xB (fig 8.7).Formulele pentru calculul distanţei până la centrul de greutate şi al ariei unorsuprafeţe uzuale din diagrama M(x) sunt date în tabelul 8.2:
Tabelul 8.2:Figura geometrică Aria Distanţa xC
A=ah xC=a/2
Fig. 8.7
y
x
M(x)
dxxxA xB
dA=M(x)dx
xBxAxxC
C
xC
yC
m(x)
x
y
C
y
x
xC a
h

97
A=ah/2 xC=2a/3
A=ah/3 xC=3a/4
A=2ah/3 xC=3a/8
8.7. Regula lui Simpson de calcul a integralei de forma ∫Mmdx
Pentru calculul integralei de forma ∫Mmdx în care funcţia M(x)⋅m(x) este ofuncţie de gradul max III (fig.8.8) se poarte folosi regula 1/3 a lui Simpson:
( )2211 43
)()( khhkkhadxxmxMB
A
x
x
++=∫ (8.25)
xC
C
y
x
h
a
xC
C
y
x
h
a
C
xC
x
y
a
h
Fig. 8.9
yM(x)
xA xB x
m(x)y
h1h3h2
xBxA x
k1 k2 k3
aa
a
a
h4
k4
a a
Fig. 8.8
yM(x)
xA xB x
m(x)
y
h1h3h2
xBxA x
k1 k2k3
aa
a a
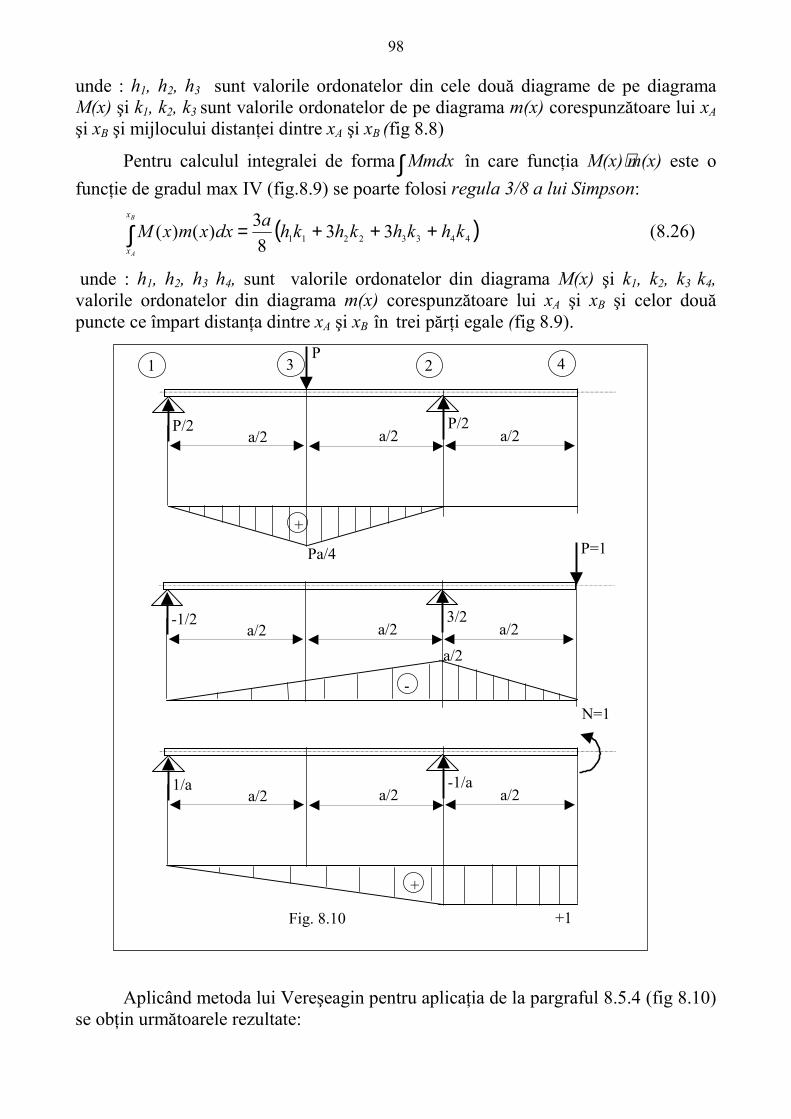
98
unde : h1, h2, h3 sunt valorile ordonatelor din cele două diagrame de pe diagramaM(x) şi k1, k2, k3 sunt valorile ordonatelor de pe diagrama m(x) corespunzătoare lui xAşi xB şi mijlocului distanţei dintre xA şi xB (fig 8.8)
Pentru calculul integralei de forma ∫Mmdx în care funcţia M(x)⋅m(x) este ofuncţie de gradul max IV (fig.8.9) se poarte folosi regula 3/8 a lui Simpson:
( )44332211 338
3)()( khkhkhkhadxxmxMB
A
x
x
+++=∫ (8.26)
unde : h1, h2, h3 h4, sunt valorile ordonatelor din diagrama M(x) şi k1, k2, k3 k4,valorile ordonatelor din diagrama m(x) corespunzătoare lui xA şi xB şi celor douăpuncte ce împart distanţa dintre xA şi xB în trei părţi egale (fig 8.9).
Aplicând metoda lui Vereşeagin pentru aplicaţia de la pargraful 8.5.4 (fig 8.10)se obţin următoarele rezultate:
P
P/2a/2a/2a/2
P/2
+
3 2 4
Pa/4
1
P=1
3/2a/2a/2a/2
-1/2
-
a/2
Fig. 8.10
N=1
-1/aa/2a/2a/2
1/a
+
+1

99
EIPaaPaaPa
EI
EIPaaaPaaaPa
EIw
161
32
24211
31
24211
32232
2421
231
24211
2
4
3
4
=
⋅⋅⋅⋅+⋅⋅⋅⋅=ϕ
−=
−⋅⋅⋅⋅+
−⋅⋅⋅=
(8.27)
Aplicând formula lui Simson pentru aplicaţia de la pargraful 8.5.4 (fig 8.10) seobţin următoarele rezultate: (8.28)
( )16
1043
84
21
46221
441
8400
62
32
20
83
84
44624488400
62
2
4
3
4
4
PaPaPaaPaPaaEI
PaEIw
aaPaaPaaaPaaPaaEIw
=
⋅+
⋅⋅+
⋅
⋅+
⋅+
⋅⋅+⋅
⋅=ϕ
−=
−⋅+
−⋅⋅+
−⋅
⋅+
−⋅+
−⋅⋅+⋅
⋅=
8.8. Teorema lui CastiglianoTerema lui Castigliano permite calculul deplasărilor liniare sau unghiulare ale
unui punct sau plan al unui corp elastic sub acţiunea forţelor sau cuplurilor aplicateasupra lor. Fie un sistem de forţe P1 , P2..., Pn independente ce acţionează asupraunui corp astfel încât energia potenţială de deformaţie elastică acumulată de acestaare valoarea U (fig.8.10).
Se consideră că una dintre forţe Pi suferă o creştere de dPi, atunci energia
potenţială de deformaţie elastică creşte dela valoarea iniţială U la ii
dPPUU
δδ+ .
Considerăm că cele două serii de forţe seaplică în ordine inversă, adică mai întâi seaplică forţa dPi apoi se aplică forţele P1, P2, ...Pn. Se notează cu:dδi - deplasarea punctului Ai produsă datorităacţiunii forţei dPi pe direcţia ei;δi - deplasarea punctului Ai produsă datorităacţiunii forţelor P1, P2,... Pi,... Pn pe direcţiaforţei Pi.Lucrul mecanic efectuat de forţa dPi pe
deplasarea proprie dδi este:
( ) ii
i ddPdPL δ⋅=′2
(8.29)
Lucrul mecanic efectuat de forţa dPi pe deplasarea δi este: ( ) iii dPdPL δ⋅=′′ (8.30)
Fig. 8.10
PnPi
P2
P1
Ai A’i
δi
dPi
dδi
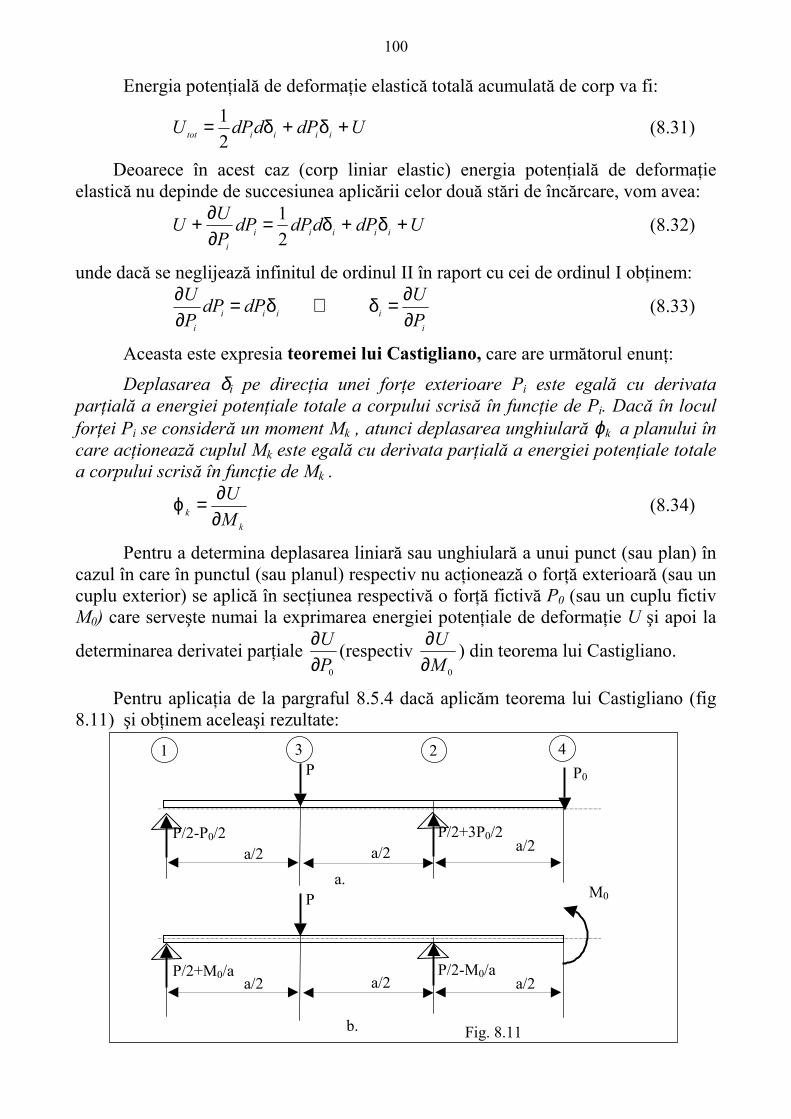
100
Energia potenţială de deformaţie elastică totală acumulată de corp va fi:
UdPddPU iiiitot +δ+δ=21 (8.31)
Deoarece în acest caz (corp liniar elastic) energia potenţială de deformaţieelastică nu depinde de succesiunea aplicării celor două stări de încărcare, vom avea:
UdPddPdPPUU iiiii
i
+δ+δ=∂∂+
21 (8.32)
unde dacă se neglijează infinitul de ordinul II în raport cu cei de ordinul I obţinem:
iiiii
i PUdPdP
PU
∂∂=δ⇒δ=
∂∂ (8.33)
Aceasta este expresia teoremei lui Castigliano, care are următorul enunţ:Deplasarea δi pe direcţia unei forţe exterioare Pi este egală cu derivata
parţială a energiei potenţiale totale a corpului scrisă în funcţie de Pi. Dacă în loculforţei Pi se consideră un moment Mk , atunci deplasarea unghiulară ϕk a planului încare acţionează cuplul Mk este egală cu derivata parţială a energiei potenţiale totalea corpului scrisă în funcţie de Mk .
kk M
U∂∂=ϕ (8.34)
Pentru a determina deplasarea liniară sau unghiulară a unui punct (sau plan) încazul în care în punctul (sau planul) respectiv nu acţionează o forţă exterioară (sau uncuplu exterior) se aplică în secţiunea respectivă o forţă fictivă P0 (sau un cuplu fictivM0) care serveşte numai la exprimarea energiei potenţiale de deformaţie U şi apoi la
determinarea derivatei parţiale 0P
U∂∂ (respectiv
0MU
∂∂ ) din teorema lui Castigliano.
Pentru aplicaţia de la pargraful 8.5.4 dacă aplicăm teorema lui Castigliano (fig8.11) şi obţinem aceleaşi rezultate:
P
P/2+3P0/2a/2a/2a/2
3 2 41P0
P/2-P0/2
a.
Fig. 8.11b.
P
P/2-M0/aa/2a/2a/2
M0
P/2+M0/a

101
Expresia energiei de deformaţie este: ∫=l
i dxEI
MU2
2
(8.35)
deci relaţiile (8.33) şi (8.34) devin :
∫∫ ⋅∂∂=
∂∂=ϕ⋅
∂∂=
∂∂=
l
ii
l
i
i
i dxEIM
MM
MU;dx
EIM
PM
PUw
004
04 (8.36)
Expresiile momentului M(x,P0) pe cele trei tronsoane în primul caz (fig. 8.11.a)sunt:
( ) xPPxaPxaPPM
;PxxaPPM;xPPM
23
22
222
0024
032
013
++
+−+
−=
−
+−=−=
(8.37)
iar derivatele parţiale corespunzătoare sunt:
( )2
321
221
2 0
24
0
32
0
13 xxaP
M;xaP
M;xP
M ++−=∂
∂
+−=
∂∂−=
∂∂
(8.38)
Expresiile momentului M(x) pe cele trei tronsoane pentru P0=0 sunt
022222 243213 =
−=−
+== M;xaPPxxaPM;xPM (8.39)
Rezultă:
EIPadxxaxaPxxP
EIw
/a/a
32221
22221 32
0
2
04 −=
+
−
−+
−= ∫∫ (8.40)
Expresiile momentului M(x,M0) pe cele trei tronsoane în al doilea caz (fig.8.11.b) sunt:
;Pxaxa
MPM;xa
MPM −
+
+=
+=
2220
320
13 (8.41)
( ) 000
24 222Mx
lMPxlPxl
lMPM =
−+
+−+
+=
iar derivatele parţiale corespunzătoare sunt:
12
10
24
0
32
0
13 =∂∂
+=
∂∂=
∂∂
MM;ax
aMM;
ax
MM (8.42)
Rezultă:
EIPadxax
aPxaxPdx
axxa
EI
/a/a
1621
2221 22
0
2
04 =
+
−
++⋅=ϕ ∫∫ .

102

103
CAPITOLUL IXSISTEME STATIC NEDETERMINATE
FORMATE DIN BARE DREPTE
9.1. GeneralităţiPrin sistem static nedeterminat format din bare drepte (hierstatic) se înţelege
acel sistem pentru care nu se pot determina folosind ecuaţiile de echilibru dinMecanică, toate forţele de legătură cu mediul fix (sistem static nedeterminat exterior)respectiv toate eforturile din barele sale (sistem static nedeterminat interior)
În primul caz (sistem static nedeterminat exterior) gradul de nedeterminare GNeeste diferenţa dintre numărul de necunoscute introduse de legături NN (numărul dereacţiuni) şi numărul de ecuaţii de echilibru independente EI ce se pot scrie dinMecanică. Pentru sistemul de bare articulate plan din fig. 9.1 gradul de nedeterminareexterioară se calculează astfel: GNe=NN-EI=5-3=2
În al doilea caz (sistem static nedeterminat interior) gradul de nedeterminareGNi este diferenţa dintre numărul de necunoscute introduse de barele sistemului NB(eforturi axiale din barele sistemului) şi numărul de ecuaţii de echilibru independenteEI ce se pot scrie din Mecanică (prin metoda izolării nodurilor EI=2n-3, n= numărulde noduri). Pentru sistemul de bare articulate plan din fig. 9.1 plan gradul denedeterminare interior este: GNi=NB-EI=8-7=1. Deci gradul de nedeterminare globalîn acest caz este: GN = GNe+ GNi=3
În cazul unui sistem spaţial de bare articulate vom avea analog:GNe=NN-EI unde EI = 6GNi=NB-EI unde EI = 3n-6
În cazul unui sistem plan format din bare sudate (cadru plan) (fig.9.2) numărulde necunoscute introdus de fiecare bară este 3 şi corespunde celor trei eforturi careapar în secţiunea barei N, T şi Mi . Fiecare contur interior plan introduce deci trei
aP
a
a 2P 2
2PFig.9.1
a
P
a
2P
Fig.9.2
a
a
A
B

104
necunoscute care corespund celor trei eforturi din secţiunea barei (fig.9.3), decigradul de nedeterminare interior este: GNi=3.
Pentru sistemul de bare sudate plan din fig. 9.2 gradul de nedeterminareexterior se calculează analog: GNe=NN-EI=6-3=3, iar gradul de nedeterminareinterior este GNi=3 (are un singur contur interior). Deci gradul de nedeterminare alsistemului în acest caz este: GN = GNe+ GNi=6.
Într-adevăr secţionând cadrul cu un pan imaginar ca în fig. 9.4 şi introducândeforturile secţionale: N1, T1, Mi1, N2, T2, Mi2 rezultă două cadre static determinate (înipoteza că cele 6 eforturi de mai sus sunt cunoscute), cu câte 3 necunoscute în A şi Bşi cu câte 3 ecuaţii de echilibru din Mecanică, deci sistemul de bare din fig. 9.4 aregradul de nedeterminare egal cu 6.
În spaţiu numărul de necunoscute introduse este după cum urmează: un conturînchis introduce 6 necunoscute, o încastrare introduce 6 necunoscute, o articulaţiesferică 3 necunoscute, etc. şi numărul de ecuaţii independente de echilibru ce se potscrie este 6.
Grinzile continue sunt de asemenea sisteme static nederminate: astfel grindaîncastrată la un capăt şi situată pe două reazeme rigide punctuale are gradul denedeterminare GNe =5 – 3 = 2, iar o grinda încastrată la ambele capete şi situată peun reazem rigid punctual are gradul de nedeterminare : GNe =7 – 3 = 4 (vezi capitolulV - Grinzi continue)
9.2. Metoda eforturilor. Sistem de bază.Ecuaţiile de condiţie ale metodei eforturilorPentru rezolvarea sistemelor static nedeterminate de tipul celor prezentate mai
sus se folosesc diferite metode: metoda eforturilor, metoda deplasărilor, etc. Metoda eforturilor introduce un număr de necunoscute X1, X2, ... Xn, prinsuprimarea legăturilor exterioare (reacţiunilor), sau a legăturilor interioare (a bareloraparţinând contururilor închise) şi transformarea lui într-un sistem static determinatnumit sistem de bază sau sistem fundamental.
Necunoscutele X1, X2, ... Xn se numesc eforturi static nedeterminate. Pentrusistemul de bare articuate din fig. 9.1 de trei ori static nedeterminat sunt prezentatedouă sisteme de bază în fig. 9.5.a,b (X1, X2, X3 sunt eforturile static nedeterminate),
P
2P
Fig.9.4A
B
N1
N2
T1
T2
T2
N2
Mi2Mi2
Mi1Mi1
N1
T1
Mi
NTT
N
Mi
Fig.9.3

105
iar pentru sistemul de bare sudate din fig. 9.2 de 6 ori static nedeterminat în fig.9.4 afost deja prezentat un sistem de bază (X1≡N1, X2≡T1, X3≡Mi1, X4≡N2 , X5≡T2 , X6≡Mi2sunt eforturile static nedeterminate),
Transformarea sistemului static nedeterminat dat (sistemul real) în sistem debază se poate face în mai multe moduri. Sistemul de bază trebuie să fie un sistemindeformabil geometric, adică un sistem care să nu permită deplasări cinematice subacţiunea sarcinilor exterioare.
În principiu, metoda eforturilor se bazează pe scrierea condiţiilor de deplasăriale diferitelor puncte ale sistemului de bază, datorate sarcinilor exterioare şinecunoscutelor static nedeterminate, care deplasări trebuie să fie identice cu cele alesistemului real.
Aceste condiţii se pot obţine imediat pentru sistemele static nedeterminateexterior anulând deplasările diferitelor puncte ale sistemului de bază, deplasăriobţinute prin suprapunerea efectelor forţelor exterioare aplicate şi a eforturilor staticnedeterminate în sistemul de bază.
Astfel pentru sistemul de bază din fig 9.5 s-au făcut următoarele notaţii:δ10 – deplasarea nodului 3 pe direcţia efortului X1 sub acţiunea forţelor exterioare P,2P şi 2P 2 ;
Fig.9.5
aP
a
a 2P 2
2PX2
X1
X3
X3
a. b.
aP
a
a 2P 2
2PX1
X2
X3
X3X1
a.
3
P41
2P 2
2PX2
X1
X3
X32
5
δ10
δ20
δ30
3
41
X1=1
b.
2
5
δ11δ21
δ31
Fig.9.6

106
δ20 – deplasarea nodului 3 pe direcţia efortului X2 sub acţiunea forţelor exterioare P,2P şi 2P 2 ;δ30 – deplasarea nodului 4 pe direcţia efortului X3 sub acţiunea forţelor exterioare P,2P şi 2P 2 ;δ11 – deplasarea nodului 3 după direcţia efortului X1 sub acţiunea uneui forţe X1=1;δ21 – deplasarea nodului 3 după direcţia efortului X2 sub acţiunea uneui forţe X1=1;δ31 – deplasarea nodului 4 după direcţia efortului X3 sub acţiunea uneui forţe X1=1;δ12 – deplasarea nodului 3 după direcţia efortului X1 sub acţiunea uneui forţe X2=1;
δ22 – deplasarea nodului 3 după direcţia efortului X1 sub acţiunea uneui forţe X2=1;δ32 – deplasarea nodului 4 după direcţia efortului X1 sub acţiunea uneui forţe X2=1;δ13 – deplasarea nodului 3 după direcţia efortului X1 sub acţiunea uneui forţe X3=1;δ23 – deplasarea nodului 3 după direcţia efortului X2 sub acţiunea uneui forţe X3=1;δ33 – deplasarea nodului 3 după direcţia efortului X3 sub acţiunea uneui forţe X3=1.
Deplasările totale δ1 şi δ2 ale nodului 3 după cele două direcţii X1 şi X2 se obţinprin suprapunerea efectelor celor patru stări de încărcare şi trebuie să fie identice cucele din sistemul real (adică nule):
δ1= δ10 + δ11X1 + δ12X2 + δ13X3 = 0 (9.1) δ2= δ20 + δ21X1 + δ22X2 + δ23X3 = 0Pentru sistemul static nedeterminat interior deplasarea nodului 4 în sistemul de
bază pe direcţia efortului X3 sub acţiunea forţelor exterioare aplicate, trebuie să fieegală şi de sens contrar cu cea corespunzătoare acţiunii eforturilor staticnedeterminate X1, X2 şi X3 aplicate de asemenea în sistemul de bază şi care se obţinprin suprapunerea efectelor:
-δ30 = δ31X1 + δ32X2 + δ33X3. (9.2) Rezolvând sistemul format din cele trei ecuaţii (9.1) şi (9.2) se obţin
necunoscutele static nedeterminate X1, X2 şi X3 .
Fig.9.6
3
41
X2=1
c.
2
5
δ12
δ22
δ32
3
41
X3=1
d.
2
5
δ13
δ23
δ33X3=1

107
Deplasările δio, δij se detremină folosind metoda Mohr-Maxwell:
∑∑==
==Nb
k k
kjkikij
Nb
k k
kikkio EA
nnEAnN
11;
!! δδ (9.3)
unde Nk este efortul axial din bara k atunci când în sistemul de bază acţionează forţelor exterioare date. nik este efortul axial din bara k atunci când în sistemul de bază acţionează forţa unitară Xi=1.
9.3. Aplicaţia 1 Se consideră sistemul static nedetreminat format din două bare sudate din fig.
9.7, se alege sitemul de bază ca în fig. 9.8 şi ecuaţiile ce condiţie ale metodeieforturilor se scriu în mod analog:
δ1= δ10 + δ11X1 + δ12X2 + δ13X3 = 0 δ2= δ20 + δ21X1 + δ22X2 + δ23X3 = 0 (9.4) δ3= δ30 + δ31X1 + δ32X2 + δ33X3 = 0
Pentru calculul deplasărilor δio, δij se foloseşte metoda Mohr-Maxwell, iarpentru calculul integralelor, formula lui Simsom sau regula lui Vereşceaghin:
aP
a
2P
Fig.9.7
a
a
A
Ba
Pa
2P
Fig.9.8
a
a
A
X1
X2
X3
B
Fig.9.8
-Pa
A-2Pa -Pa
-Pa
M0
a.
P
2P-
-
-
-2a
m1
b.
X1=1
-

108
Avem următoarele valori ale deplasărilor δi0 (Simson): (9.5)
[ ]
[ ]
[ ] [ ]
[ ]
[ ] [ ]
[ ] 2
30
30
3
20
20
3
10
10
271)2(1)(410
6
1)(1)(41)(6
21)(1)5,0(4106
641)2)(2()2)((4)2(0
6
2)(2)(42)(6
22)(5,1)5,0(406
311)2)(2()5,1)((4)(0
6
)2)(())((40)(6
2
PaPaPaa
PaPaPaaPaPaadxmMEI
PaaPaaPaaa
aPaaPaaPaaaPaaPaaadxmMEI
PaaPaaPaaa
aPaaPaPaadxmMEI
−=⋅−+⋅−+⋅+
+⋅−+⋅−+⋅−+⋅−+⋅−+⋅==
−=−+−+⋅+
+−+−+−+−+⋅−+⋅==
=−−+−−+−⋅+
+−−+−−+⋅−==
∫
∫
∫
δ
δ
δ
respectiv δij (Simson): (9.6)
[ ]
[ ]
[ ]
[ ] [ ]
[ ] [ ]
[ ] [ ] aaadxmEI
aaaaaaaadxmmEIEI
aaaaaaaaaaaaadxmEI
aaaadxmmEIEI
aaaaaaadxmmEIEI
aaaaaadxmEI
4)1)(1()1)(1(4116
2)1)(1()1)(1(4116
2
6)1)(2()1)(2(4126
2)1)(2()1)((4106
2
332)2)(2()2)(2(422
62)2)(2())((400
62
2)2)(1())(1(4016
2
4)2)(2())(2(4026
2
38)2)(2())((400
62
2333
2323223
32222
2313113
3212112
32111
=++⋅+++⋅==
=++⋅+++⋅===
=++⋅+++⋅==
−=−+−+⋅===
−=−+−+⋅===
=−−+−−+⋅==
∫
∫
∫
∫
∫
∫
δ
δδ
δ
δδ
δδ
δ
Folosind regula lui Vereşceaghin se obţin aceleaşi valori pentru deplasări:
2a
Fig.9.8
2a
m2
c.
+
+
X2=1
1
1
m3
d.
+
+X3=1
+

109
23
030
32
020
31
010
271)(21)(
21
641)2()2(
21)2()(2)2(
65)(
21
311)2(
65)2(
21)()(2
PaPaaPaadxmMEI
PaaPaaaPaaaPaadxmMEI
PaaPaaaPaadxmMEI
−=⋅−+⋅−==
−=⋅−+⋅−+−==
=−−+−⋅−==
∫
∫
∫
δ
δ
δ
(9.7)
aadxmEI
aaaaadxmmEIEI
aaaaaaadxmEI
aaadxmmEIEI
aaaadxmmEIEI
aaaadxmEI
41122
621212
3322)2(2)2(
32)2(2
21
21)2(221
42)2(221
38)2(
32)2(2
21
2333
2323223
32222
2313113
3212112
32111
=⋅⋅⋅==
=⋅⋅+⋅⋅===
=+⋅==
−=⋅−===
−=−===
=−−==
∫
∫
∫
∫
∫
∫
δ
δδ
δ
δδ
δδ
δ
(9.8)
Introducând valorile obţinute în sistemul (9.4) se obţine
=++−
=++−
−=−−
PaaXXaXa
PaXaXaXa
PaXaXaXa
27462
6416
3324
31124
38
2
322
12
3
32
2
3
13
3
32
23
1
3
(9.9)
Rezolvând acest sistem rezultă:
PaXPXPX
1875,0;406,0;906,0
3
2
1
−==
−=(9.10)
Reacţiunile din A rezultă din ecuaţiile de echilibru (fig.9.9):
PMaPaPPaaPaPMM
PVPPVF
PHPPHF
A
Az
AAy
AAx
5635,002906,02406,01875,02:0
594,00406,0:0
094,10906,02:0
=⇒
=⋅+⋅+−⋅−⋅−=
=⇒=+−=
−=⇒=−+=
∑∑∑
(9.11)
Cu aceste date se pot trasa diagramele de eforturi N, T şi M (fig. 9.10).
a
P
a
2P
Fig.9.9
a
a
A
X1=-0,906P
X2=0,406P
X3=-0,1875Pa
B
VA
MA
HA

110
9.4. Simetrii în sisteme static nedetreminate Metoda eforturilor introduce în sistemele static nedeterminate un număr marede necunoscute X1, X2, ... Xn, prin suprimarea legăturilor exterioare sau a interioare şitransformarea lor în sisteme static determinate (sisteme de bază).
Anumite sisteme prezintă simetrii care permit încă de la început determinareaunor necunoscute (fie că sunt nule sua egale pe perechi), ceea ce micşorează gradul
de nedeterminare.Dacă se secţionează o bară cu un planimaginar şi se introduc eforturilesecţionale pe cele două feţe ale secţiuniise observă (fig. 9.11) că eforturile N şiM sunt eforturi simetrice , iar efortul Teste un efort antisimetric.
În fig. 9.12 este prezentat un sistem simetric încărcat simetric cu cele douădiagame de eforturi T şi M. Se observă din aceste diagrame că efortul antisimetric Teste nul în planul de simetrie. Acestă proprietate se poate generaliza astfel: în planulde simetrie al unui cadru (simetric) încărcat simetric eforturile antisimetrice suntnule.
N NT
Mi Mi
T
Fig.9.11
q
Fig.9.12
A B
qa/2 qa/2
T=0
Mmax=qa2/8
Diagrama T
Diagrama M
q
Fig.9.13
A B
qa/4 -qa/4
M=0
q
-qa/4
qa/4 qa/4Diagrama T
Diagrama M
-qa2/16
qa2/16
Fig.9.10
N
-
-
-0,906P
-0,594P
T
-
-0,906P
1,094P
-0,406P
0,594P+
-
+
-0,1875Pa
M
-0,5635Pa
0,5305Pa
-0,3755Pa
0,2185Pa
-
-
+
+

111
În fig. 9.13 este prezentat un sistem simetric încărcat antisimetric cu diagamelede eforturi T şi M corespunzătoare. Se observă din aceste diagrame că efortul simetricM este nul în planul de simetrie. Acestă proprietate se poate generaliza astfel: înplanul de simetrie al unui cadru (simetric) încărcat antsimetric eforturile simetricesunt nule.
9.5. Calculul deplasărilor în sisteme static nedetreminate Deplasările din sistemele static determinate se pot calcula cu metodeenergetice (Metoda Mohr Maxwell) prin suprapunerea efectelor forţelor exterioaredate şi a eforturilor static nedeterminate (acum cunoscute) în sistemul de bază, careeste echivalent din punct de vedere mecanic cu sistemul real. Astfel deplasareapunctului A pe direcţia forţei FA (fictive) se determină cu relaţia:
nAnAAAA XXX δδδδδ ...33220 +++= (9.12)
unde deplasările au aceeaşi semnificaţie: δA0 – deplasarea punctului A pe direcţia FAîn sistemul de bază sub acţiunea forţelor exterioare date;δAi – deplasarea punctului A pe direcţia forţei FA , în sistemul de bază, sub acţiuneaunei forţe unitare Xi=1;expresiile acestor deplasări prin metoda Mohr Maxwell sunt:
[ ][ ][ ] dxmM
EIdxm)mX...mXmXM(
EI
mmX...mmXmmXdxmMEI
dxmmX...dxmmXdxmmXdxmMEI
AAnnA
nAnAAAA
nAnAAAA
∫∫
∫
∫∫∫∫
=++++=δ
++++=δ
++++=δ
11
1
1
22110
22110
22110
(9.13)
Acest rezultat arată că deplasarea într-un punct oareacare A al unui sistemstatic nedeterminat se obţine cu formula lui Mohr Maxwell în care se înmulţesc:diagrama de momente reale M cu diagrama mA coespunzătoare unei forţe unitareaplicate în sistemul de bază pe direcţia pe care dorim să determinăm deplasarea.
Pentru cadrul de la aplicaţia 9.3 dorim să calculăm deplasarea punctelor deaplicaţia ale celor două forţe exterioare 2P şi P.
Se construiesc cele trei diagrame M, mC şi mD (fig.9.14. b, c,d).Deplasările se calculează folosind regula 1/3 a lui Simson:
[ ]
[ ]
[ ]
[ ] 3
3
0994,0))(5635,0()5,0)(01655,0(40)5305,0(6
0278,0))(5635,0())(01655,0(4)()5305,0(6
))(5305,0())(0755,0(4)()3755,0(6
))(3755,0()5,0)(0785,0(40)2185,0(6
PaaPaaPaPaadxMmEI
PaaPaaPaaPaa
aPaaPaaPaa
aPaaPaPaadxMmEI
DC
DD
=−−+−−+⋅==
=−−+−−+−⋅+
+−+−+−⋅−+
+−−+−−+⋅==
∫
∫
δ
δ
(9.14)

112
9.6. Aplicaţia 2Se consideră sistemul format din 7 bare rigide articulate în noduri , de secţiune
constantă. În nodul 5 acţionează două forţe exterioare P şi 2P (fig. 9.15). Bara estelegată de mediul fix prin două articulaţii (nodurile 1,2) şi un reazem rigid (nodul 3).Dorm să determinăm reacţiunile din articulaţiile 1, 2 şi reazemul simplu 3, precum şideplasările pe orizontală şi verticală ale nodului 5.
Acesta este un sistem de două ori static nedeterminat exterior. Sistemulde bază se obţine suprimând legătura din nodul 2 şi introducând necunoscutele staticnedeterminate X1 şi X2 (fig. 9.16).
Fig.9.14
a
P
a
2Pa
a
A
X1=-0,906P
X2=0,406P
X3=-0,1875Pa
B
VA
MA
HA
a.
C1
--a c.
mC
1-
-
-a
-a
d.
mD
D
Sistemul de bază
-0,1875Pa
M
-0,5635Pa
0,5305Pa
-0,3755Pa
0,2185Pa
-
-
+
+
b.
-0,01655Pa
0,0775Pa
-0,0785Pa-0,3755Pa
Fig.9.15
2
a a
a 2P
P
3
41 5
Fig.9.16
2
a a
a 2P
P
3
41 5
X1
X2

113
Ecuaţiile de condiţie se obţin scriind deplasările nodului 2 în sistemul de bazădupă cele două direcţii (X1 şi X2 ) care trebuie să fie identice cu cele din sistemul real(nule):
δ1= δ10 + δ11X1 + δ12X2 = 0 (9.15) δ2= δ20 + δ21X1 + δ22X2 = 0unde:
δ10 , δ20, reprezintă deplasarea nodului 2 în sistemul de bază pe direcţia lui X1respectiv pe direcţia lui X2, sub acţiunea forţelor date P şi 2P;δ11 , reprezintă deplasarea nodului 2 în sistemul de bază pe direcţia lui X1, subacţiunea unei forţe X1=1;δ12 =δ21 , reprezintă deplasarea nodului 2 în sistemul de bază pe direcţia lui X1, subacţiunea unei forţe X2=1 respectiv deplasarea nodului 2 pe direcţia lui X2 pentru oforţă X1=1(conform teoremei lui Betii aceste deplasări sunt egale);δ22 , reprezintă deplasarea nodului 2 în sistemul de bază, pe direcţia lui X2, subacţiunea unei forţe X2=1;
Aceste deplasări se determină prin metoda Mohr-Maxwell:
∑∑∑∫
∑∑∑∫
===
===
ppjpip
p p
pjpip
p p
jpipij
ppipp
p p
pipp
p p
ippi
LnnEAEA
Lnndx
EAnn
LnNEAEA
LnNdx
EAnN
1
10
000
δ
δ(9.16)
unde:! EA sunt rigidităţile barelor articulate constante şi aceleaşi pentru toate barele;! N0 sunt eforturile din barele sistemului de bază sub acţiunea forţelor exterioare P şi
2P (fig. 9.16), p=1,2…7;! n1 ,n2 sunt eforturile din barele sistemului de bază sub acţiunea unei forţe X1=1
(fig. 9.17) , respectiv a unei forţe X2=1 (fig. 9.18) , p=1,2…7;
Fig.9.17
23
41 5-1 01
11
0
0- 2
1
X1=1
Fig.9.16
2
2P
P
3
41 5-P 3PP
-2P-2P
-2P
-2 2 P2 2 P
2P
4P

114
Înlocuind valorile corespunzătoare ale eforturilor axiale din fig. 9.16, 9.17,9.18 rezultă:
( )
( )
EAaLnn
EA
EAaLnn
EA
EAaLnn
EA
EAPaLnN
EA
EAPaLnN
EA
iiii
iiii
iiii
iiii
iiii
==
−===
+==
==
−−==
∑
∑
∑
∑
∑
2222
212112
1111
2020
1010
1
1
2231
21
2431
δ
δδ
δ
δ
δ
(9.17)
Se introduc aceste valori în (9.15) şi rezolvând sistemul rezultă următoarelevalori pentru necunoscutele X1 şi X2:
PPXPPX 621,0222
3;379,1222241
21 −=+
−==++= (9.18)
Din ecuaţiile de echilibru pentru toate forţele din sistemul de bază rezultă şicelelalte necunoscute ale problemei (fig. 9.19):
PVXPVVVXPV
PHXPH
621,2402
;379,2
313
1321
111
=⇒−==⇒−−=
−=⇒−−=(9.19)
Pentru a calcula deplasările nodului 5 se foloseşte metoda Mohr Maxwell:
∑∑∑∑ ====p
pVppp p
pVpp
ppHpp
p p
pHpp LnNEAEA
LnNv;LnN
EAEALnN
u 55
555
511 (9.20)
unde:! Np sunt eforturile din barele sistemului real dat sub acţiunea forţelorexterioare, de legătură şi a necunoscutelor static nedeterminate X1 şi X2 (fig. 9.19);! n5H sunt eforturile din barele sistemului de bază, sub acţiunea unei forţe X=1aplicată în nodul 5 pe direcţia deplasării căutate (u5) (fig. 9.20);
Fig.9.18
2 3
41 5-10
-1
0
0
X2=1
0
00
Fig.9.19
2
2P
P
3
41 5
H1=-2,379P
3P2,379P
-0,621P0
-2P
-2,828P0,879P
V1=0
V3=2,621P
X2=-0,621P
X1=1,379P
Fig.9.20
23
41 5-1 11
0
0
0
X=1
0

115
! n5V sunt eforturile din barele sistemului de bază, sub acţiunea unei forţe X=1aplicată în nodul 5 pe direcţia deplasării căutate (v5) (fig. 9.21);
Înlocuind valorile eforturilor corespunzătoare din fig. 1.15, 1.16, 1.17 , 1.18 ,1.19 şi 1.20 rezultă:
EAPav
EAPau 035,13;379,5 55 −=−= (9.21)
Fig.9.21
2 3
41 51-1
1- 2
X=1
0
2
1
-1
0

116

117
CAPITOLUL XFLAMBAJUL DE COMPRESIUNE AXIALĂ
AL BARELOR DREPTE
10.1. GeneralităţiFenomenul de pierdere al stabilităţii echilibrului elastic ce ia naştere în
interiorul unui corp care este supus acţiunii unor anumite tipuri de sarcini, seîntâlneşte la numeroase elemente din construcţia dre maşini. De exemplu: o barădreaptă supusă la o forţă de compresiune P (fig.10.1.a); un inel supus unei forţedistribuite pe lungimea sa la exterior (pe partea convexă) (fig.10.1.b); o bară subţireîncărcată cu o forţă perpendiculară le axa ei(fig.10.1.c), un cilindru sau o sferă supusăunei forţe distribuite pe suprafaţă la exteriorul său (pe partea convexă) (fig.10.1.d).
În cazul barei supusă la compresiune axială (fig.10.1.a), atât timp cât forţa P nudepăşeşte o anumită valoare valoare (numită critică Pcr), dacă se aplică o forţătransversală Q acesta va produce încovoierea barei, iar după înlăturarea ei ea revinela forma iniţială (dreaptă) de echilibru. Spunem că bara se află în domeniulechilibrului elastic stabil. Atunci când forţa P atinge valoarea critică Pcr, dupăaplicarea şi înlăturarea forţei Q ea nu mai revine la forma de echilibru. Spunem căbara a ieşit din domeniul echilibrului elastic stabil (echilibru nestabil). Acestfenomen de trecere din starea de echilibru stabil în cea de echilibru nestabil senumeşte în acest caz flambaj de compresiune axial a barelor drepte.
Fig 10.1a.
P
Q
b.
c.
d.
P

118
Experienţele arată că valoarea forţei critice de flambaj Pcr depinde atât dematerialul, forma şi dimensiunile barei, cât şi de modul de rezemare al barei - saulegăturile cu mediul fix - şi modul aplicare a sarcinilor exterioare.
Calculul la flambaj constă în alegerea pentru siguranţă a forţei maxime Pmax decf ori mai mică decât forţa critică de flambaj Pcr. Relaţia de dimensionare, verificaresau calculul forţei capabile la flambaj se bazează deci pe relaţia:
afcr
f cPPc ≤=
max
(10.1)
unde caf este coeficientul de siguranţă la flambaj admisibil.Tensiunea critică de flambaj σcr este tensiunea de compresiune
corespunzătoare forţei critice de flambaj:
APcr
cr =σ (10.2)
Tensiunea critică de flambaj σcr poate să fie în unele cazuri cu mult inferioarălimitei de curgere σc , de elasticitate σe , de proporţionalitate σp sau chiar tensiuniiadmisibile σa .
Dacă tensiunea critică de flambaj este mai mare decât limita de curgere (σcr >σc) practic nu se mai poate vorbi de flambaj, deoarece materialul intră în domeniulcurgerii plastice care se manifestă prin deformaţii foarte mari.
Dacă tensiunea critică de flambaj este inferioară limitei de curgere dar maimare decât limita de proporţionalitate (σp < σcr < σc ) spunem că avem flambaj îndomeniul elasto-plastic (sau mai simplu flambaj plastic) iar dacă este inferioarălimitei de proporţionalitate (σcr < σp) spunem că avem flambaj în domeniulelastic(sau mai simplu flambaj elastic). Problema calculul tensiunii critice deflambaj în domeniul elastic a fost rezolvată din sec. XVIII de către LEONARDEULER În continuare este prezentat modul de calcul al forţei critice pentru baradreaptă de secţiune constantă.
10.2. Formulele lui EULER pentru calculul forţei critice deflambaj de compresiune al barei drepte
a) Bara dreaptă de secţiune constantă articulată la ambele capete Se consideră o bară dreaptă de lungime L şi secţiune constantă, articulată lacapete, supusă unei forţe axiale de compresiune P. Acestă forţă creşte de la zero pânăla valoarea critică Pcr când bara flambează după direcţia corespunzătoare momentuluide inerţie minim Imin (care în fig. 10.2 este axa Oy). Fie w(x) săgeata barei la distanţax de capăt . Ecuaţia diferenţială a fibrei medii deformate este:
iyMwEI −=′′min (10.3)
unde momentul încovoietor are expresia: )()( xwPxM criy = (10.4)

119
Ecuaţia (10.3) se mai scrie:
0min
=⋅+′′ wEIPw cr (10.3’)
Notând cu: min
2
EIPcr=α
ecuaţia diferenţială (10.3’) devine: 02 =+′′ ww α (10.3”)Ecuaţia caracteristică corespunzătoare este:
αα irradacinilecur ±==+ 2,122 ;0
Soluţia ecuaţiei diferenţiale omogene (10.3”) se scrie:xixi eCeCxw αα −+= 21)( (10.5)
deoarece această soluţie trebuie să fie reală, explicitând eiαx şi e-iαx ea devine: xBxAxw αα cossin)( += (10.6)
Constantele A şi B se determină din condiţiile la limită ale problemei:x = 0 , w = 0 ⇒ B = 0 (10.7)x = L, w = 0 ⇒ AsinαL=0 şi deoarece A ≠ 0⇒ sin αL=0 ⇒ αL=kπ sau 2222 πα kL =Înlocuind pe α 2 rezultă:
2min
22222
min LEIkPkL
EIP
crcr ππ =⇒= (10.8)
Soluţia problemei se scrie deci:
= x
LkAxw πsin)( (10.9)
Pentru k=1 rezultă forţa critică de flambaj fundamentală, iar forma fibrei mediideformate corespunde unei semisinusoide pe lungimea barei (fig. 10.3.a):
==⇒=
LxAxw
LEIPk cr
ππ sin)(;41 2min
2
1 (10.10)
Pentru k=2 forţa critică de flambaj care este de 4 ori ai mare decât ceafundamentală iar forma fibrei medii deformate corespunde unei sinusoide întregi pelungimea barei (practic în acest caz bara este prevăzută cu un reazem intermediarsituat la jumătatea distanţei, ca în fig. 10.3.b):
==⇒=
LxAxw
LEIPk cr
ππ 2sin)(;42 2min
2
2 (10.11)
Pentru k=3 forţa critică de flambaj este de 9 ori ai mare decât cea fundamentalăşi forma fibrei medii deformate corespunde a trei semisinusoide pe lungimea barei(practic în acest caz bara este prevăzută cu două reazeme intermediare situate laaceeaşi distanţă L/3, ca în fig. 10.3.c):
x.
Pcr
x
Fig. 10.2
w(x)z
Pcr
O

120
π=π=⇒=
LxsinA)x(w;
LEIPk min
cr
393 2
2
3 (10.12)
b) Bara dreaptă de secţiune constantă încastrată la un capăt şi liberăla celălalt
Se consideră o bară dreaptă de lungime L şi secţiune constantă încastrată la uncapăt şi liberă la celălalt, supusă unei forţe axiale de compresiune P. Acestă forţăcreşte de la zero până la valoarea critică Pcr, când bara flambează după direcţiacorespunzătoare momentului de inerţie minim Imin (care în fig. 10.4 este axa Oy). Fiew(x) săgeata ei la distanţa x de capăt.
Momentul încovoietor are în acest caz aceeaşi expresie (10.4): )()( xwPxM criy =
Se obţine deci aceeaşiecuaţie diferenţială (10.3’):
0min
=⋅+′′ wEIPw cr (10.13)
Soluţia ecuaţiei diferenţialăare aceeaşi formă (10.6):
xBxAxw αα cossin)( += (10.14)
iar derivata ei este: xBxAxw αααα sincos)( −=′ (10.15)
Constantele A şi B nu mai sunt aceleaşi şi se determină din condiţiile la limităale problemei care în acest caz se scriu:
x = 0 , w = 0 ⇒ B = 0 (10.16)
Fig. 10.3
Pcr3Pcr3
c.L/3 L/3 L/3
Pcr2Pcr2
b.L/2 L/2
Pcr1Pcr1
a.L
x.
x
Fig. 10.4
w(x)
z
Pcr O

121
x = L, w’=ϕ = 0 ⇒ α A cosαL=0 deoarece αA ≠ 0
⇒ cos αL=0 ⇒ αL=(2k-1)π /2 sau 412 22
22 π−=α )k(L
Înlocuind pe α 2 rezultă:
2
22222
412
412
LEI)k(P)k(L
EIP min
crmin
cr π−=⇒π−= (10.17)
Pentru k=1 rezultă forţa critică de flambaj fundamentală pentru acest caz:
2
2
1 41
LEIPk min
cr
π=⇒= (10.18)
iar forma fibrei medii deformate corespunde unui sfert de sinusoidă (fig. 10.4):
=
LxAxw
2sin)( π (10.19)
c) Bara dreaptă de secţiune constantă încastrată la un capăt şi articulatăla celălaltSe consideră o bară dreaptă de lungime L şi secţiune constantă încastrată la un
capăt şi articulată la celălalt, supusă unei forţe axiale de compresiune P. Acestă forţăcreşte de la zero până la valoarea critică Pcr, când bara flambează după direcţiacorespunzătoare momentului de inerţie minim Imin (care în fig. 10.5 este axa Oy). Fiew(x) săgeata ei la distanţa x de capăt. În articulaţia O acţionează şi forţa de legătură Qdupă Oz (care readuce bara în poziţia din fig.)
Momentul încovoietor are în acest caz expresia:
xQxwPxM criy ⋅−⋅= )()(
Înlocuind în (10.3) se obţineecuaţia diferenţială de ordinul II:
xEI
QwEIPw cr
minmin
=⋅+′′ (10.20)
Soluţia ecuaţiei omogeneare aceeaşi formă (10.6):
xBxAxw om αα cossin)( += (10.21)Soluţia generală a ecuaţiei (10.20) se scrie ca suma dintre soluţia ecuaţiei
omogene şi o soluţie particulară a ecuaţiei diferenţiale :
xPQxBxAxwxwxw
crpom ++=+= αα cossin)()()( (10.22)
iar derivata ei este: crP
QxBxAxw +−=′ αααα sincos)( (10.23)
Constantele A şi B se determină din condiţiile la limită ale problemei, care sescriu în acest caz astfel:
x.
x
Fig. 10.5
w(x)O
PcrQ
z

122
x = 0 , w = 0 ⇒ B = 0
x = L, w = 0 ⇒ 0sin =+ LPQLA
cr
α (10.24)
x = L, w’=ϕ =0 ⇒ 0cos =+crP
QLA αα
Dacă multiplicăm a doua ecuaţie (10.24) cu (-L) şi adunăm cu prima rezultă:0=α⋅α−α )LcosLLsin(A şi întrucât A≠0 trebuie ca paranteza să fie nulă:
LLtg:sauLcosLLsin α=α=α⋅α−α 0 , care este o ecuaţie transcendentă.Prima soluţie nenulă a ecuaţiei transcendente este pentru:
2222111 2046219204932449344 π≅π==α⇒=α≅=α ,,L,Ltg)rad(,L
Rezultă forţa critică de flambaj pentru acest caz :
2
2
12
221
1 22LEIP
LEIP min
crmin
cr π=⇒π=α= (10.25)
d) Bara dreaptă de secţiune constantă încastrată la un capăt şi având oculisă la celălalt capătSe consideră o bară dreaptă de lungime L şi secţiune constantă încastrată la un
capăt şi având o culisă la celălalt capăt, supusă unei forţe axiale de compresiune P.Acestă forţă creşte de la zero până la valoarea critică Pcr, când bara flambează dupădirecţia corespunzătoare momentului de inerţie minim Imin (care în figura 10.6 esteaxa Oy). În culisa O mai acţionează cuplul de legătură M0. Fie w(x) săgeata ei ladistanţa x de capăt. Momentul încovoietor are în acest caz expresia:
0)()( MxwPxM criy −⋅= (10.26)
Înlocuind în (10.3) se obţineecuaţia diferenţială:
min
0
min EIMw
EIPw cr =⋅+′′ (10.27)
Soluţia omogenă a ecuaţiei(10.27) are aceeaşi formă (10.6):
xBxAxw om αα cossin)( += (10.28)Soluţia generală a ecuaţiei (10.27) se scrie ca suma dintre soluţia ecuaţiei
omogene şi o soluţie particulară:
crpom P
MxBxAxwxwxw 0cossin)()()( ++=+= αα (10.29)
respectiv derivata ei: xBxAxw αααα sincos)( −=′ (10.30)
xx
Fig. 10.6
w(x)z
Pcr
M0
O

123
Constantele A şi B se determină din condiţiile la limită ale problemei care sescriu în acest caz:
x = 0: w = 0 ⇒ 00 =+crP
MB
w’ =0 ⇒ A=0 (10.31)
x = L, w = 0 ⇒ 0cos 0 =+crP
MLB α
w’=ϕ =0 ⇒ 0sin =− LB αα (B≠0)
Din prima şi a treia ecuaţie (10.31) rezultă: cosαL=1 cu soluţiile: αL=2kπ ,iar din ultima ecuaţie rezultă: 0sin =Lα cu soluţiile: αL=kπ . Prima soluţie αLcomună nenulă este: α1L=2π . Înlocuind pe α rezultă:
2
2
1221 44
LEIPL
EIP min
crmin
cr π=⇒π= (10.32)
Soluţia ecuaţiei diferenţiale se scrie pentru acest caz:
xPMx
PMxw
crcr
αα 200 sin2)cos1()( =−= (10.33)
şi reprezintă o sinusoidă completă le lungimea barei.Observaţie:Expresiile forţei critice de flambaj pentru fiecare din cele 4 cazuri diferă doar
printr-un coeficient, astfel încât se pot scrie sub forma generală:
2
2
)Lk(EIPf
mincr
π= (10.34)
Pentru fiecare din cele 4 cazuri fundamentale prezentate mai sus kf arevalorile: a) kf=1; b) kf=2; c) kf= 2/2 ; d) kf=0,5.
Notând cu LkL ff = lungimea de flambaj, această mărime care depinde demodul de rezemare a barei, se obţine formula lui Euler pentru calculul forţei critice deflambaj al barei drepte supusă la compresiune:
2min
2
fcr L
EIP π= (10.35)
Tensiunea critică de flambaj se calculează cu relaţia (10.2):
2min2
2min
2
2
iL
EA
IL
EA
P
ff
crcr
ππσ ===
unde:A
Ii minmin = (10.36)

124
10.3. Limitele de aplicare a formulei lui Euler.Flambajul elastic şi flambajul plastic
Dacă în relaţia (10.36) se notează : miniLf=λ (10.38)
care se numeşte coeficientul de zvelteţe sau coeficientul de subţirime al barei, atuncitensiunea critică de flambaj se scrie:
2
2
λπσ E
cr = (10.38)
Tensiunea critică de flambaj σcreste o funcţie hiperbolică de coeficientulde zvelteţe λ, numită hiperbola lui Eulerσcr = f(λ) şi este reprezentată în fig.10.7.
Întrucât formula pentru calculultensiunii critice de flambaj s-a stabilit pebaza unor relaţii care admit valabilitatealegii lui Hooke, atunci ele sunt valabilenumai pentru: domeniul de tensiuni :
pcr σσ ≤
(σp - limita de proporţionalitate).
Linia λ=λ0 împarte domeniul funcţiei σcr = f(λ) în două zone:I. pcr, σ<σλ>λ 0 - zona flambajului elastic (10.39)
II. ccrp, σ≤σ≤σλ<λ 0 - zona flambajului plastic (elasto-palstic) (10.39’)
Încercările experimentale au demonstrat că există o bună concordanţă întrevalorile forţei critice de flambaj (tensiunii critice) determinate prin măsurători şi celedeterminate cu ajutorul formulei lui Euler în zona flambajului elastic. Pentru adetermina valoarea lui λo se înlocuieşte în relaţia (10.38) σcritic cu σp şi rezultă :
p/E σπ=λ 20 . (10.40)
De exemplu pentru OL37 considerând pentru σp=210 MPa, E=2,1⋅ 106MPa,rezultă λo≅ 100
Pentru zona flambajului plastic pcrc σ≤σ≤σ în cazul oţelurilor traseulcurbiliniu al curbei caracteristice face dificilă detreminarea forţei critice de flambajcu ajutorul formulei lui Euler datorită necunoaşterii valorii modului de elasticitate; înplus, la descărcarea barei curba caracteristică este o linie dreaptă paralelă cu cuporţiunea rectilinie având panta egală cu E. Engesser-Karaman a introdus noţiunea demodul de elasticitate redus:
σcr
Fig. 10.7λλ0
σp
Zona flambajului elastic

125
IIE
IIEE Tr
21 += (10.41)
unde: I1 şi I2 sunt momentele de inerţie ale celor două părţi ale secţiunii pentru caretensiunile σ1 şi σ2 produse la încărcare –descărcare diferă datorită curbăriiaccentuate a barei (axa neutră a secţiunii nu mai trece prin centrul de greutateal secţiunii);ET modul de elasticitate care este egal cu panta la curba caracteristică înpunctul corespunzător forţei maxime.Forţa critică de flambaj se determină cu o formulă similară:
2
2
f
rcr L
IEP
π= (10.42)
Teoria Engesser-Karaman nu se aplică datorită incertitudinii asupra valorilormodului de elasticitate redus. Acestă inceritudine a condus pe unii cercetători ca sădea diferite relaţii analitice pentru funcţia σcr = f(λ) din zona flambajului plastic ,relaţii stabilite pe baza înercărilor experimentale.
După studiile făcute deTETMAJER şi IASINSKI se poateconsidera în domeniul flambajuluiplastic (adică pentru pcrc σ≤σ≤σ , sauîntre punctele A şi B din fig. 10.8) orelaţie liniară de forma:
λ−=σ bacr (MPa) (10.43)
unde coeficienţii a şi b s-au determinatexperimental .
Tabelul 10.1
Material a b λo λ1OL37 (σc=240MPa) 304 1,12 105 60
OL (σr=480MPa) (σc=310MPa)
460 2,57 100 60
OL (σr=520MPa) (σc=360MPa)
577 3,74 100 60
Oţel aliat (5%Ni) 461 2,25 86 0oţel aliat (Cr-Mo) 980 5,3 55 0Duraluminu 372 2,14 50 0Lemn (fibră longitudinală) 28,7 0,19 100 0
σcr
Fig. 10.8λ
λ0
σc
Zona
flambajului
plastic
λ1
σp
C B A Zona flambajului elastic
O
126
Pentru diferite materiale, valorile acestor coeficienţi, precum şi valorilecoeficienţilor de zvelteţe λo şi λ1 sunt daţi în tabelul 10.1. Pentru materiale casante sefoloseşte o relaţie parabolică. Astfel pentru fontă (λo=80 şi λ1=0) avem următoareaformulă:
2053012776 λ+λ−=σ ,cr (MPa) (10.44)
10.4. Calculul la flambaj al barelor dreptea. Calculul de dimensionare
Calculul de dimensionare se începe cu formula lui Euler, rezultând momentulde inerţie necesar:
ELPc
IcPPunde;
LEIP fmaxaf
minafmax
cr
f
mincr 2
2
2
2
π=⇒=π= (10.45)
Întrucât formula folosită este valabilă pentru zona flambajului elastic trebuie săverificăm dacă λo > λ. Se determină momentul de inerţie imin:
AIi min
min = şi coeficientul de subţirime: miniLf=λ (10.46)
Dacă: λ > λ0 ⇒ dimensionarea cu formula lui Euler este corectă;
λ < λ0 ⇒ dimensionarea nu este corectă şi se folosesc în continuareformulele pentru domeniul flambajului plastic (Tetmajer - Iasinski):
λ−=σ bacr , rezultând dimensiunea secţiunii (aria necesară sau monetul de
inerţie minim): minnecmaxaf
minfaf
max
cr IsauAAPc
IAbLac ⇒=−⇒=
σσ (10.47)
b. Calculul de verificare Calculul de verificare se face calculând coeficientul de zvelteţe pentru a stabiliîn ce zonă se produce flambajul:1. Dacă λ > λ0 verificarea coeficientului de siguranţă la flambaj se face cu
ajutorul formulei lui Euler :
2
2
f
mincraf
max
cr
LEIPunde;c
PP π=≥ (10.48)
2. Dacă λ < λ0 verificarea coeficientului de siguranţă la flambaj se face cuajutorul formulelor pentru domeniul flambajului plastic (Tetmajer- Iasinski):
APsibaundec max
maxcrafmax
cr =σλ−=σ≥σσ (10.49)

127
c. Calculul forţei capabile La fel ca în cazul calculului de verificare se determină coeficientul de zvelteţepentru a stabili în ce zonă se produce flambajul:1. Dacă λ > λ0 calculul forţei capabile se face cu ajutorul formulei lui Euler :
2
2
faf
min
af
crmax Lc
EIcPP π== (10.50)
2. Dacă λ < λ0 ⇒ verificarea coeficientului de siguranţă la flambaj se face cuajutorul formulelor pentru domeniul flambajului plastic (Tetmajer- Iasinski):
Ac
baAc
APafaf
crmaxmax
λ−=σ=σ= (10.51)

128

129
CAPITOLUL XISOLICITĂRI SIMPLE ALE BAREI CURBE
PLANE CU AXA CIRCULARĂ
11.1. Relaţii dierenţiale dintre eforturi şi sarcinile exterioareDiagrame de eforturi în bare curbe
Se consideră o bară curbă avândaxa de formă circulară încărcată cusarcini exterioare sub forma unorforţe concentrate sau distribuitecuprinse în planul barei (Oxz),momente după axa Oy şi un elementde lungime ds din această bară avândunghiul la vârf dθ aflat la unghiul θde capătul ei, pe feţele căruia vomavea eforturile tăietoare N, T şi My(pe faţa negativă) respectiv N+dN,T+dT şi My +dMy (pe faţa pozitivă),(fig. 11.1).
Pentru a găsi relaţiile diferenţiale dintre aceste eforturi şi forţele exterioarevom scrie ecuaţiile de echilibru a forţelor/cuplurilor exterioare şi eforturilorcorespunzătoare celor două feţe ale elementului :
02
cos1)(2
sin)(0
02
cos)(2
sin)(0
02
sin)(2
cos)(0
=++−
−−−+++−⇒=
=+++−+++⇒=
=++−++−⇒=
∑
∑
∑
dMMMdRdNNNdRdTTTM
qdsddTTTddNNNF
ddTTTddNNNF
Oy
z
x
θθ
θθ
θθ
(11.1)
Dacă ecuaţiile (11.1) se fac următoarele aproximări:
2
02
;12
cos;22
sin2 θθθθθ dcuraportindddd ≅
≅≅ (11.2)
Ecuaţiile (11.1) devin:000 =−=++θ=θ− TdsdM;qdsdTNd;TddN (11.3)
Înlocuind în expresiile (11.3) dθ = ds / R se obţin relaţiile diferenţiale dintreeforturi pentru bara curbă plană:
My
dθ/2
θ
N
T T+dT
N+dN
My+dMy
q
R
Fig. 11.1
dθ/2
dθ/2
dθ/2
x
z
Q=qds

130
Tds
dMqRN
dsdT
RT
dsdN =−−== ;; (11.4)
Dacă se integrează relaţiile (11.4) se obţin expresiile eforturilor axiale tăietoareşi înconvoietoare pe lungimea barei curbe (variabila independentă s):
∫∫∫ =+−== ;)(;)(1)(;1)( TdssMdsqRNR
sTTdsR
sN (11.5)
Dacă variabila independentă este θ = s / R atunci relaţiile (11.5) se scriu:
∫∫∫ =+−== ;)(;)()(;)( θθθθθθ TdRMdqRNTTdN (11.6)
Observaţii:! Pe baza relaţiilor (11.5) şi (11.6) se trasează diagramele de eforturi în mod
asemănător cu trasarea diagramelor de eforturi pentru barele drepte: în dreptulforţelor (momentelor) concentrate trebuie să se determine cele două valori aleefortului în secţiunea respectivă, adică limitele funcţiilor la stînga Tst (Mst)respectiv la dreapta Tdr (Mdr). Diagramele se construiesc în coordonate polare de oparte şi de alta a axei circulare a barei respectând acceaşi regulă a semnelor ca labarele drepte (N şi T pozitive în exteriorul barei, iar M pozitiv în interior).
! din (11.5 şi 11.6) rezultă că funcţiile pentru cele două eforturi: axiale şiînconvoietoare, au acceaşi formă, diferind doar printr-un coeficient (1/R) şi oconstantă de integrare (dată de condiţiile la limită);
! din (11.4) rezultă că pentru T=0 se obţin valori maxime sau minine (locale) aleeforturilor N şi M, iar pentru q=0 şi N=0 se obţin valori maxime sau minine(locale) ale eforturilor T;
! pentru ∞→R relaţiile (11.4) devin relaţiile diferenţiale ale eforturilorcoresunzătoare barelor drepte ( xs → ), deduse la capitolul II:
TdxdMq
dxdT
dxdN =−== ;;0 (11.7)
11.2. Tensiuni în bare curbe plane cu axa circularăEforturile N , T şi Mi produc în secţiunea barei curbe aceleaşi tipuri de
tensiuni ca şi la bara dreaptă. Astfel eforturile axiale N produc tensiuni normale crese determină cu relaţia:
AN=σ (11.8)
Eforturile tăietoare T produc în secţiunea barei tensiuni tangenţiale care sedetermină cu formula lui Juravski:
y
yzzx bI
*ST=τ (11.9)
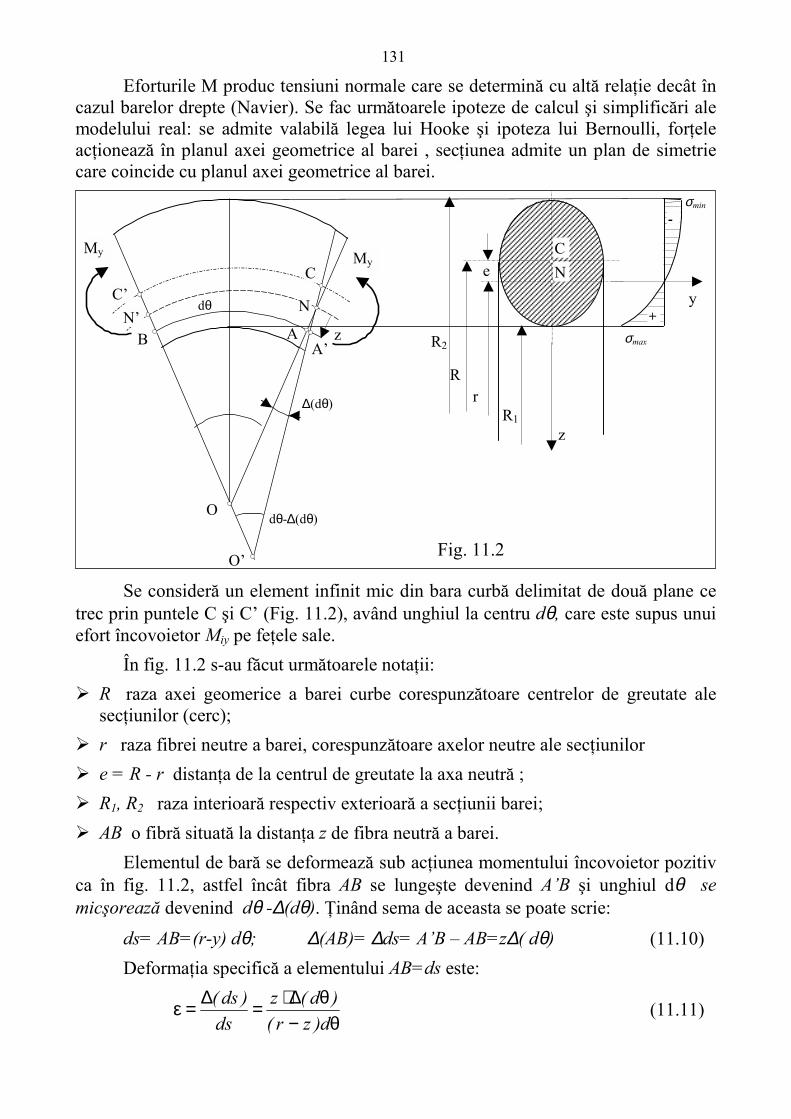
131
Eforturile M produc tensiuni normale care se determină cu altă relaţie decât încazul barelor drepte (Navier). Se fac următoarele ipoteze de calcul şi simplificări alemodelului real: se admite valabilă legea lui Hooke şi ipoteza lui Bernoulli, forţeleacţionează în planul axei geometrice al barei , secţiunea admite un plan de simetriecare coincide cu planul axei geometrice al barei.
Se consideră un element infinit mic din bara curbă delimitat de două plane cetrec prin puntele C şi C’ (Fig. 11.2), având unghiul la centru dθ, care este supus unuiefort încovoietor Miy pe feţele sale.
În fig. 11.2 s-au făcut următoarele notaţii:! R raza axei geomerice a barei curbe corespunzătoare centrelor de greutate ale
secţiunilor (cerc);! r raza fibrei neutre a barei, corespunzătoare axelor neutre ale secţiunilor! e = R - r distanţa de la centrul de greutate la axa neutră ;! R1, R2 raza interioară respectiv exterioară a secţiunii barei;! AB o fibră situată la distanţa z de fibra neutră a barei.
Elementul de bară se deformează sub acţiunea momentului încovoietor pozitivca în fig. 11.2, astfel încât fibra AB se lungeşte devenind A’B şi unghiul dθ semicşorează devenind dθ -∆(dθ). Ţinând sema de aceasta se poate scrie:
ds= AB=(r-y) dθ; ∆(AB)= ∆ds= A’B – AB=z∆( dθ) (11.10)Deformaţia specifică a elementului AB=ds este:
θ−θ∆⋅=∆=εd)zr(
)d(zds
)ds( (11.11)
Fig. 11.2
dθ
z
C
NN’
C’
B AA’
My My
∆(dθ)
dθ-∆(dθ)O
O’
CN
z
y
R1
R2
Rr
e
σmin
+
-
σmax

132
Conform legii lui Hooke tensiunea se scrie:
zrzE
zrz
d)d(E
ds)ds(E
−⋅Ω=
−⋅
θθ∆⋅=∆=ε=σ (11.12)
unde cu Ω s-a notat rotirea specifică relativă a celor două secţiuni.Se observă că legea de variaţie a tensiunilor pe suprafaţa secţiunii este
hiperbolică. Întrucât în secţiunea barei efortul N este nul se poate scrie:
0=−
⋅Ω=−
⋅Ω=σ= ∫∫∫AAA
dAzr
zEdAzr
zEdAN (11.13)
Deoarece EΩ ≠ 0 din (11.13) rezultă: 0=−∫
A
dAzr
z (11.14)
relaţie din care rezultă poziţia axei neutre (raza r) a barei.Ecuaţia de momente faţă de axa Nz arată că suma momentelor tuturor forţelor
elementare dF = σ dA este egală cu momentul încovoietor al secţiunii (efortul Miy):
AeM
E
AeE)Ae(ESEdAzr
rzzdAEM
dAzr
rzrzzEdAzr
zEdAzM
iy
*Ny
AAiy
AAAiy
⋅=Ω⇒
⋅Ω=⋅−Ω−=⋅Ω−=−
+Ω−=
−+−Ω=
−Ω=σ⋅=
∫∫
∫∫∫22
(11.15)
unde S*Ny este momentul static al secţiunii în raport cu axa Ny iar a doua integralăeste nulă, conform (11.14).
Înlocuind în (11.12) expresia lui EΩ obţinută prin (11.15) se obţine expresiatensiunii la încovoiere a barelor curbe:
zrz
AeM iy
−⋅
⋅=σ (11.16)
Tensiunea maximă / minimă se obţine pentru fibrele extreme (fig. 11.2). PentruMiy > 0 tensiunea este pozitivă în fibra interioară (R1) şi negativă în fibra exterioară(R2), deci avem:
0
0
2
2
2
2
1
1
1
1
2
1
<⋅⋅
=−⋅⋅
=−
⋅⋅
=σ
>⋅⋅
=−⋅⋅
=−
⋅⋅
=σ
−=
−=
Rd
AeM
RrR
AeM
zrz
AeM
Rd
AeM
RRr
AeM
zrz
AeM
iyiy
rRz
iymin
iyiy
Rrz
iymax
(11.17)
133
Observaţii:! Dacă Miy < 0 tensiunile sunt negative în fibra inferioară (R1) şi pozitive în fibra
exterioară (R2);! tensiunea în fibra interioară este de regulă mai mare decât cea în fibra exerioară,
în modul: 2
2
1
1
Rd
AeM
Rd
AeM iyiy ⋅
⋅>⋅
⋅(11.18)
! Tensiunile datorate eforturilor axiale N şi momentelor încovoietoare Miy se adunăalgebric în secţiunea periculoasă (în care momentul încovoietor este maxim înmodul)
! eforturile axiale N şi momentele încovoietoare Miy sunt de regulă maxime înaceeaşi secţiune datorită faptului că anularea derivatei (T=0) are loc în aceeaşisecţiune (vezi 11.4).
11.3 Calculul deplasărilor pentru bare curbe plane Deplasările pentru barele curbe plane se pot calcula prin metode energetice(Mohr Maxwell). Întrucât deplasările datorate eforturilor N şi T în general seneglijează în raport cu cele produse de efortul Miy , deplasarea (rotirea) unei secţiunioarecare al barei A se poate scrie astfel:
∫ θ⋅=δ dmMEI AA
1 (11.19)
unde M=M(θ) este expresia funcţiei momentului încovoietor pe lungimea bareidatorat forţelor reale ce acţionează aupra barei;mA=mA(θ) este expresia funcţiei momentului încovoietor datorat unei forţe (saucuplu) unitare ce acţionează aupra barei în punctul A pe direcţia pe care dorimsă determinăm deplasarea (rotirea secţiunii).În aplicaţia de la paragraful 11.4 se calculează separat deplasările după cele
două direcţii: cea orizontală δH şi cea verticală δV şi apoi se aplică principiulsuprapunerii efectelor calculânduse (geometric) deplasarea totală cu relaţia:
22VHA δ+δ=δ (11.20)
11.4. AplicaţieSe consideră bara curbă având axa geometrică sub forma unui semicerc ca în
fig.11.3.a. Asupra capătului A ala barei acţionează sub unghiul α=450 o forţăconcentrată P=2 2 P şi un cuplu M=2PR. Să se determine reacţiunile din încastrare,diagramele de eforturi N, T şi M, valoarea maximă a tensiunii din secţiuneapericuloasă şi deplasarea punctului de aplicaţie a forţei şi cuplului.

134
Calculul reacţiunilor din BPentru a determina reacţiunile din încastrare se scriu ecuaţiile de echilibru din
Mecanică pentru forţele şi cuplurile ce acţionează pe bara curbă astfel (fig.5.1.b):
PRM;MPRRsinPM
PV;VsinPF
PH;HcosPF
BBBz
BBy
BBx
2022220
20220
20220
−==+−⋅α⇒=
==+α−⇒=
−==+α⇒=
∑∑∑
(11.21)
Diagramele de eforturi N, T şi MPentru trasarea diagramelor se exprimă eforturile N, T şi M în funcţie de
forţele aplicate şi unghiul θ (ca parametru) şi se trasează prin patru puncte, (respectiv);/;/;/; ππππ=θ 43240 astfel:
! Efortul N într-o secţiune oarecare situată la unghiul θ faţă de A, se determină casumă a proiecţiilor după direcţia tangentei la cerc (t) a tuturor forţelor situate înstânga secţiunii (fig.11.3.b):
)cossin(PcossinPsincosP)(N θ+θ−=θ⋅α+θ⋅α−=θ 22222 (11.22)
! Efortul T într-o secţiune situată la unghiul θ faţă de A se determină ca sumă aproiecţiilor tuturor forţelor situate în stânga secţiunii pe direcţia normalei la cerc(n) (direcţia razei) (fig.11.3.b) :
)sin(cosPsinsinPcoscosP)(T θ+θ−=θ⋅α−θ⋅α−=θ 22222 (11.23)
! Efortul M într-o secţiune oarecare situată la unghiul θ faţă de A se determină casuma cuplurilor şi momentelor faţă de secţiunea curentă a tuturor forţelor situate înstânga secţiunii (fig.5.1.b)
[ ] )sin(cosPRPR)cos(RsinsinRcosP)(M θ−θ=+θ−⋅α+θ⋅α−=θ 22122 (11.24)
Din aceste diagrame rezultă următoarele:
xA
VB
O
R
α=450
2P 2
θ HB
y
MB
2PR
Fig.11.3.b
n
t
P
P
A
BO
R
α=450
Fig.11.3.a2P 2
θ
2PR

135
! diagrama N şi M admite un maxim (în modul) pentru 0135=θ , ce corespundepunctului în care se anulează efortul T (rezultă din relaţia difrenţială între cele
două eforturi TddN =θ
, rTddM ⋅=θ
). Valoarea eforturilor pentru 0135=θ , este:
N=-2 2 P; M=-2 PR 2 (11.25)
• diagrama T admite un maxim pentru045=θ , ce corespunde punctului în care se
anulează efortul N, din relaţia difrenţialăîntre cele două eforturi:
qrNddT −−=θ
, q=0
Valoarea efortului este:T = -P 2 (11.26)
Calculul tensiunii maxime în secţiunea periculoasă:Întrucât ambele eforturi N şi M sunt negative, valorile maxime sunt:
00 135135 =θ=θ== MM,NN maxmax , atunci tensiunile maxime sunt în fibra interioară
(negative):
1
2R
e/deA
MA
N maximaxmax
−⋅
+=σ (11.27)
dRed
)rR(dPR
dP
Re/d
eAM
AN maximax
max −−⋅
−π+
π=−
⋅+=σ
2228282
221
(11.28)
unde r distanţa până la axa neutră pentru secţiunea circulară este dată de:
)dRR(dr
22
2
424 −−= ; (11.29)
iar e distanţa dintre cele două axe Cy şi Ny este: e = R – r (11.30)
Fig. 11.3.e
+2PR -2PR
Diagrama M
-2 2 PR
O
-2PR
450 1350-
+
Fig. 11.3.c
+2P -2P
Diagrama N
-2 2 P
O
-2P
4501350
-
+
Fig. 11.3.d
+2P-2P
Diagrama T
-2 2 P
O
-2P
450
1350+
-
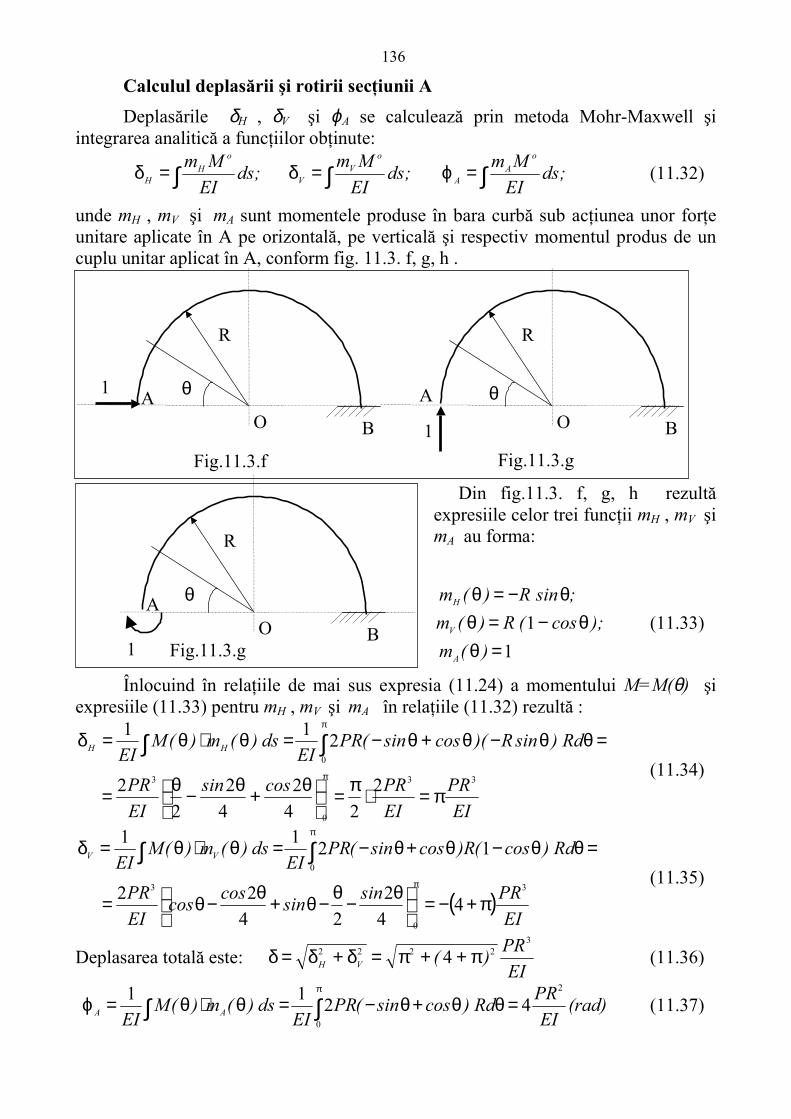
136
Calculul deplasării şi rotirii secţiunii ADeplasările δH , δV şi ϕA se calculează prin metoda Mohr-Maxwell şi
integrarea analitică a funcţiilor obţinute:
;dsEIMm;ds
EIMm;ds
EIMm o
AA
oV
V
oH
H ∫∫∫ =ϕ=δ=δ (11.32)
unde mH , mV şi mA sunt momentele produse în bara curbă sub acţiunea unor forţeunitare aplicate în A pe orizontală, pe verticală şi respectiv momentul produs de uncuplu unitar aplicat în A, conform fig. 11.3. f, g, h .
Din fig.11.3. f, g, h rezultăexpresiile celor trei funcţii mH , mV şimA au forma:
11
=θθ−=θ
θ−=θ
)(m);cos(R)(m
;sinR)(m
A
V
H
(11.33)
Înlocuind în relaţiile de mai sus expresia (11.24) a momentului M=M(θ) şiexpresiile (11.33) pentru mH , mV şi mA în relaţiile (11.32) rezultă :
EIPR
EIPRcossin
EIPR
Rd)sinR)(cossin(PREI
ds)(m)(MEI HH
33
0
3
0
224
242
22
211
π=⋅π=
θ+θ−θ=
=θθ−θ+θ−=θ⋅θ=δ
π
π
∫∫ (11.34)
( )EI
PRsinsincoscosEIPR
Rd)cos(R)cossin(PREI
ds)(m)(MEI VV
3
0
3
0
442
2422
1211
π+−=
θ−θ−θ+θ−θ=
=θθ−θ+θ−=θ⋅θ=δ
π
π
∫∫ (11.35)
Deplasarea totală este: EI
PR)(VH
32222 4 π++π=δ+δ=δ (11.36)
EI
PRRd)cossin(PREI
ds)(m)(MEI AA
2
0
4211 =θθ+θ−=θ⋅θ=ϕ ∫∫π
(rad) (11.37)
A
B
R
O1Fig.11.3.g
θAB
R
O
1 θ
Fig.11.3.f
AB
R
O1
θ
Fig.11.3.g

137
CAPITOLUL XIISOLICITĂRI DINAMICE
12.1. GeneralităţiÎn multe aplicaţii din construcţia de maşini se întâlnesc solicitări care nu
satisfac condiţiile unei solicitări statice admise până acum: forţele nu se aplicăprogresiv, nu sunt constante în timp sau prezintă discontinuităţi, sarcini care semanifestă prin şocuri dure sau moi sau acţionează local producând o stare de tensiunide contact specifică (contact hertzian) sau deformaţii plastice mari. Aceste solicităriintră în categoria solicitărilor dinamice şi pot fi clasificate în :! solicitări prin forţe de inerţie ca rezultat al forţelor de inerţie ce apar datorită
acceleraţiilor unor piese în mişcare;! solicitări prin şocuri produse datorită variaţiilor bruşte a vitezelor sau
acceleraţiilor pieselor aflate în mişcare;! solicitări la oboseală datorate variaţilor periodice ale eforturilor sau tensiunilor
din piese care se repetă ciclic, produse de sarcini din exterior sau de forţele deinerţie ce apar în timpul vibaţiilor mecanice.
12.2. Solicitări dinamice prin forţe de inerţiea. Solicitări dinamice axiale ale barei drepteSe consideră o bară dreaptă la capătul căreia este fixat un corp de masă M, care
se roteşte în jurul unei axe verticale cu vitea unghuiulară constantă ω. Bara este desecţiune constantă A, are lungimea L şi masa specifică pe unitatea de lungime γ (masabarei este: m=γL). Într-o secţiune oarecare a barei avem eforturi axiale, tăietoare şiîncovoietoare datorate greutăţii corpului de masă M, greutăţii proprii a barei şi aforţelor de inerţie centrifuge, conform proncipiului lui d’Alembert din Mecanicaanalitică (fig. 12.1).
Fig.12.1
M
O
L
ω
x
x
x
T
NMi
xz
x dx
dFi
b) c)
a)
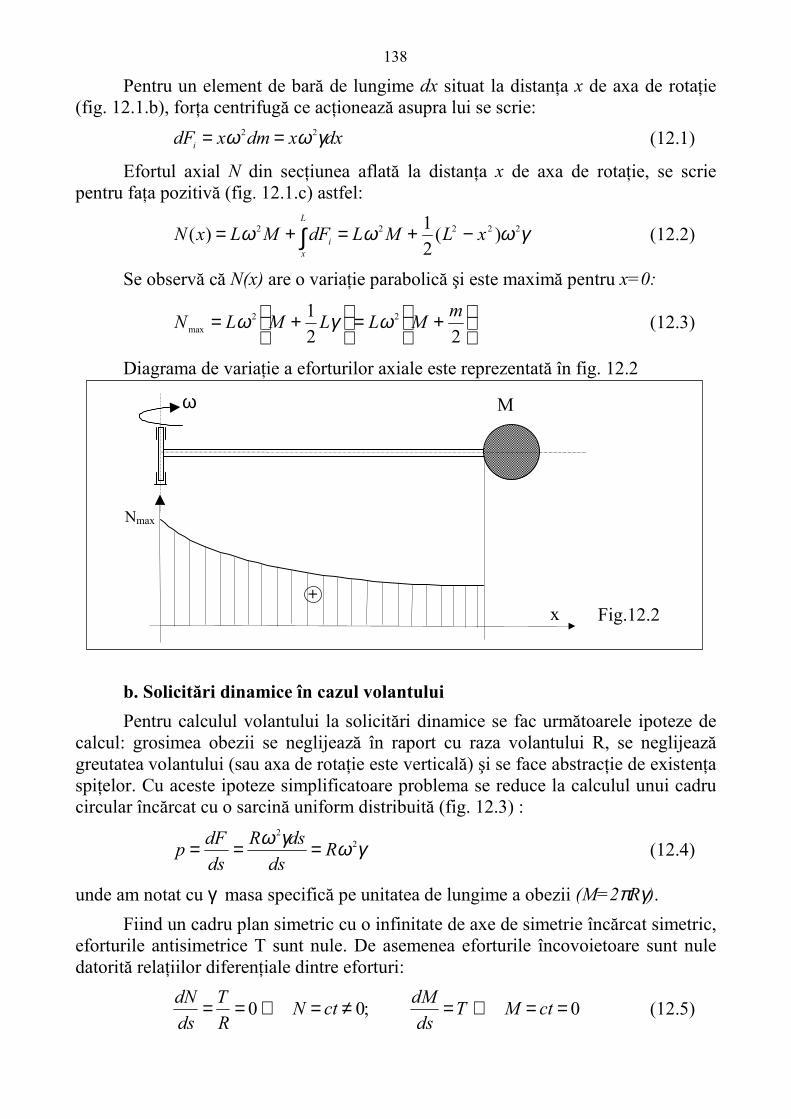
138
Pentru un element de bară de lungime dx situat la distanţa x de axa de rotaţie(fig. 12.1.b), forţa centrifugă ce acţionează asupra lui se scrie:
dxxdmxdFi γωω 22 == (12.1)
Efortul axial N din secţiunea aflată la distanţa x de axa de rotaţie, se scriepentru faţa pozitivă (fig. 12.1.c) astfel:
γωωω 22222 )(21)( xLMLdFMLxN
L
xi −+=+= ∫ (12.2)
Se observă că N(x) are o variaţie parabolică şi este maximă pentru x=0:
+=
+=
221 22
max
mMLLMLN ωγω (12.3)
Diagrama de variaţie a eforturilor axiale este reprezentată în fig. 12.2
b. Solicitări dinamice în cazul volantuluiPentru calculul volantului la solicitări dinamice se fac următoarele ipoteze de
calcul: grosimea obezii se neglijează în raport cu raza volantului R, se neglijeazăgreutatea volantului (sau axa de rotaţie este verticală) şi se face abstracţie de existenţaspiţelor. Cu aceste ipoteze simplificatoare problema se reduce la calculul unui cadrucircular încărcat cu o sarcină uniform distribuită (fig. 12.3) :
γωγω 22
Rds
dsRdsdFp === (12.4)
unde am notat cu γ masa specifică pe unitatea de lungime a obezii (M=2πRγ).Fiind un cadru plan simetric cu o infinitate de axe de simetrie încărcat simetric,
eforturile antisimetrice T sunt nule. De asemenea eforturile încovoietoare sunt nuledatorită relaţiilor diferenţiale dintre eforturi:
0;00 ==⇒=≠=⇒== ctMTds
dMctNRT
dsdN (12.5)
M
Nmax
ω
x Fig.12.2+

139
Scriind ecuaţia de proiecţii pe direcţie verticală a forţelor exterioare de inerţiedF şi eforturilor din secţiunea volantului obţinem:
γγω
θγωθπ
222
0
22 020sin2
vRN
dRNdsdFNL
==⇒
=−⇒=− ∫∫ (12.6)
unde v =ωR este viteza periferică a volantului.Relaţia de dimensionare / verificare se scrie ţinând seama de ipotezele de
calcul, pentru care tensiunile pot fi considerate constante: aAv
AN σγσ ≤==
2
12.3. Solicitări dinamice prin şoca. Solicitări dinamice axiale ale barei drepte
Se consideră o bară dreaptă verticală la capătulcăreia este fixat un opritor. Bara este de secţiuneconstantă A, are lungimea L . Dealungul barei cadeun corp degreutate P de la înălţimea h (fig. 12.4) careloveşte opritorul. În urma impactului bara suferălungirea δd, după care corpul de greutate P se opreşteşi apoi bara începe să se scurteze şi au loc vibraţiilongitudinale care se amortizează după un timp .
Pentru a determina această deformaţie δd,efortul axial Nd ce ia naştere în bară sau tensiuneadinamică σd corespunzătoare în vederea verificăriisau dimensionării barei, se face următoarea ipoteză:energia potenţială gravitaţională a corpului ce cadede la înălţima h, se acumulează în întregime subformă de energie potenţială de deformaţie elastică abarei:
Ep=U ⇒ ( ) ∫=+L
dd EA
dxNhP2
2
δ (12.7)
Fig.12.3
N N
dF
θO
ω
R ω
Fig.12.4
Lh
δst
δd
A
P

140
Deoarece rigiditatea la întindere a barei EA=const., efortul axial Nd esteconstant pe lungimea barei. Relaţia (12.7) devine:
( ) ( )22
21
2
=+⇔=+
EALNh
EAPL
EALNhP d
dd
d δδ (12.8)
Ţinând seama de expresiile deformaţiilor statică şi dinamică a barei:
EALN
EAdxN
EAPL
EAPdx d
L
dd
Lst ==== ∫∫ δδ ; (12.9)
relaţia (12.8) devine: ( ) 22 ddst h δδδ =+ (12.10)
Aceasta este o ecuaţie de gradul al II-lea în dδ care admite două soluţii: soluţianegativă nu este acceptabilă, deci soluţia unică este:
( )stststststd hh δδδδδδ /21122 ++=++= (12.11)
Se notează paranteza din relaţia (12.11) cu ψ, care se numeşte multiplicatorsau factor de impact:
sth δψ /211 ++= (12.12)
Se observă din acestă expresie că pentru: h=0 ⇒ ψ=2, deci efectul sarcinii Paplicată brusc asupra capătului barei este de două ori mai mare decât în cazul în careaceasta se aplică static (progresiv, de la 0 la valoarea maximă P).
Tensiunea dinamică care ia naştere în bară atunci când se atinge deformaţiamaximă dδ este proporţională cu dδ dacă se ţine seama de relaţiile :
;;LE
AN
LE
AP
dd
dstst δσδσ ==== (12.13)
deci: ( ) ψσδσσ ⋅=++= stststd h /211 (12.14)
Relaţia de verificare (dimensionare) în acest caz este:
aAP σψ ≤⋅ (12.15)
Dacă în expresia (12.12) se face aproximarea:
PLhEAh
st
22 =≅δ
ψ (12.16)
şi se înlocuieşte în relaţia (12.15) se obţine:
( ) 22 222
aaa
hEPALALhEP
PLhEA
AP
σσσ ≥⇔≤⇔≤ (12.17)
Deci în cazul solicitărilor dinamice prin şoc este necesar să se dimensio-nezeatât secţiunea A cât şi volumul barei (AL)nec pentru a putea prelua şocul.

141
b. Solicitări ale barei drepte prin şoc transversalSe consideră o bară dreaptă de secţiune constantă A, are lungimea L situată pe
două reazeme rigide punctiforme la capetele ei. La mijlocul barei cade de la înălţimeah un corp de greutate P (fig. 12.5). În urma impactului bara suferă deformaţii care seconcretizează la mijlocul ei prin săgeata fd, după care corpul de greutate P se opreşteşi apoi bara începe să vibreze transversal (vibraţii flexionale) şi se amortizează dupăun timp oarecare.
Pentru a determina această deformaţie fd, eforturile încovoietoate Mi(x) ce ianaştere în bară şi tensiunea dinamică σd corespunzătoare lui Mimax în vedereaverificării sau dimensionării barei, se face aceeaşi ipoteză: energia potenţialăgravitaţională a corpului de greutate P se acumulează în întregime sub formă deenergie potenţială de deformaţie elastică a barei (se neglijează greutatea barei):
Ep=U ⇒ ( ) ∫=+L
idd EI
dxMfhP2
2
(12.18)
efortul încovoietor se poate scrie (fig. 12.5):
( )[ ]
[ ]
∈−⋅
∈⋅=
LLxpentruxLP
LxpentruxP
xMd
d
id
,2/)(2
2/,02 (12.19)
Deoarece rigiditatea la încovoiere a barei EI=const, relaţia (12.18) devine:
( )
( ) ( )23332
2/
22/
0
22
4821
4896
)(8
=+⇔=+
−+=+ ∫∫
EILPfh
EIPL
EILPfhP
dxxLdxxEIPfhP
dd
dd
L
L
Ld
d
(12.20)
Fig.12.5
h
δstδd
EI
P
L/2L/2
+
M(x) PL/4

142
Ţinând seama de expresiile săgeţilor statică şi dinamică la mijlocul barei:
EILPf
EIPLf d
dst 48;
48
33
== (12.21)
relaţia (12.20) se scrie: ( ) 22 ddst ffhf =+ (12.22)
Se obţine aceeaşi ecuaţie (12.10) de gradul al II-lea în fd care admite soluţiavalabilă: ( )ststd fhff /211 ++= (12.23)
Multiplicatorul sau factorul de impact este în acest caz:
stfh /211 ++=ψ (12.24)
Se observă din acestă expresie că pentru: h=0 ⇒ ψ=2, deci efectul sarcinii Paplicată brusc asupra mijlocului barei este de două ori mai mare decât în cazul în careaceasta se aplică static (progresiv, de la 0 la valoarea maximă P).
Tensiunea dinamică maximă care ia naştere în bară atunci când se atingedeformaţia maximă fd se scrie ţinând seama de relaţiile :
;; maxmax ασασ dd
dstst fW
MfW
M ==== (12.25)
deci tensiunea dinamică maximă este: ψσσ ⋅= std (12.26)Relaţia de verificare /dimensionare în acest caz este:
ad
d WPL
WM
WM σψψσ ≤===
4maxmax (12.27)
Dacă în expresia (12.24) se face aproximarea:
3
962PLhEI
fhst
=≅ψ (12.28)
şi se înlocuieşte în relaţia (12.27) se obţine:
( ) 23
964 a
a
hEPALPLhEI
WPL
σβσ ≥⇔≤ (12.29)
În cazul solicitărilor dinamice prin şoc este deci necesar să se dimensione-zeatât secţiunea A cât şi volumul barei (AL)nec.
c. Solicitări ale arborilor prin şoc torsoinalSe consideră o bară dreaptă de secţiune circulară constantă (arbore de diametru
d) aflată în mişcare de rotaţie cu viteza unghiulară ω=const., la capătul căreia se aflăun volant de moment de inerţie mecanic J (fig. 12.6). La un moment dat se produce oblocare bruscă a arborelui în secţiunea din celălalt capăt astfel încât se poateconsidera că întreaga energie cinetică a volantului se transformă în energie potenţialăde deformaţie elasică a arborelui (se neglijează energia cinetică a arborelui şideformaţia elastică a volantului). Efortul torsional din arbore este constant pelungimea sa L, deci se poate scrie:

143
p
td
L p
td
GILMJdx
GIMJ
221
221 2
22
2 =⇒= ∫ ωω (12.30)
Arborele suferă o deformaţie torsională care se concretizează prin unghiul ϕdcu care se roteşte volantul din momentul frânării şi până la oprire:
p
td
L p
tdd GI
LMdxGIM == ∫ϕ (12.31)
Tensunea dinamică maximă se scrie:
max
3
3max 1616
dtdtd
d
dMdM τπ
πτ =⇒= (12.32)
Înlocuind în relaţia (12.30) se obţine:
2max
22
2
max3
42
4421
1616
21
dd d
GLJd
dGLJ τπωτπ
πω =⇔
= (12.33)
Înlocuind volumul arborelui 4
2dLV π= se obţine tensunea dinamică maximă:
ad VGJ τωτ ≤= 2
max (12.34)
Ca şi în celelalte două cazuri prezentate, în acest caz se dimensionează volumularborelui pentru a putea prelua şocul produs prin blocarea capătului său:
2
22a
nec
GJVτ
ω= (12.35)
Fig.12.6
GIp d
L
J
ω

144

145
145
CAPITOLUL XIIIELEMENTE DE TEORIA ELASTICITĂŢII
13.1. STAREA SPAŢIALĂ DE TENSIUNI ŞI DEFORMAŢII ÎNJURUL UNUI PUNCT DIN INTERIORUL CORPULUI
13.1.1. Componentele tensorului tensiunilor în jurul unui punct dininteriorul corpului elasticSe consideră un corp elastic solicitat de un sistem complex spaţial de sarcini şi
un punct oarecare P(x, y, z) din interiorul lui. Se separă în jurul punctului un elementde volum paralelipipedic, cu cele trei feţe adiacente perpendiculare între ele Oxy,Oyz, Ozx (P≡O, fig. 13.1).
Cele 9 componente ale tensiunilor pe fiecarefaţă a paralelipipedului determină tensorultensiunilor care se exprimă sub forma uneimatricii 3×3 (tensor de ordinul II):
=
zzyzx
yzyyx
xzxyx
Tστττστττσ
σ (13.1)
Conform teoremei dualităţii, între tensiuniletangenţiale există relaţiile: τxy = τyx ,τyz = τzy,τxz = τzx, ceea ce conduce la concluzia căstarea de tensiune într-un punct estecaracterizată de şase mărimi scalareindependente: trei componente normale σx ,σy , σz şi trei tangenţiale τxy , τyz , τzx .
Indicele componentelor normale semnifică direcţia axei pe care acţionează, iarpentru componentele tangenţiale primul indice semnifică direcţia axei după careacţionează iar al doilea direcţia normalei la suprafaţa pe care acţionează.
A cunoaşte starea de tensiune într-un punct din interirul unui corp înseamnă acunoaşte cele şase tensiuni ca funcţii de coordonatele punctului respectiv. Teoriaelasicităţii se ocupă cu analiza stării de tensiuni şi determinarea valorilor principale(maxime şi minime) ale tensiunilor precum şi a direcţiilor după care acţioneazăacestea.
x
y
z
σy
σy
σz
σz
σxσx
τzx
τzx τyx
τyx
τxy
τxy
τzy
τzy
τyz
τyz
τxz
τxz
Fig. 13.1
O≡P

146
146
13.1.2. Componentele tensorului deformaţiilor în jurul unui punctdin interiorul unui corp.Se poate arăta că există o analogie perfectă între relaţiile care descriu starea de
tensiune din jurul unui punct şi cele care descriu starea de deformaţie.Astfel, dacă se consideră o deformaţie specifică liniară ε de-a lungul unei direcţii
normale la o suprafaţă oarecare On (fig. 13.2) având cosinuşii directori ! , m şi n,componentele sale de pe cele trei axe de coordonate se scriu în funcţie de
componentele tensorului deformaţiilorastfel:
nm
nm
nm
zzyzxz
yzyyxy
xzxyxx
⋅+⋅+⋅=
⋅+⋅+⋅=
⋅+⋅+⋅=
εγγδ
γεγδ
γγεδ
21
21
21
21
21
21
!
!
!
(13.2)
respectiv:( ) ( ) ( )
!!! nmnmnm
prprpr
zxyzxyzyx
zOnyOnxOn
⋅+⋅+⋅+⋅+⋅+⋅=
++=
γγγεεεε
δδδε222 (13.3)
Tensorul deformaţiilor se exprimă analog sub forma unei matricii 3×3 :
=
zzyzx
yzyyx
xzxyx
T
εγγ
γεγ
γγε
ε
21
21
21
21
21
21
(13.4)
13.1.3. Ecuaţiile diferenţiale de echilibru ale tensiunilor. Condiţiile pe contur
Variaţia componentelor tensorului tensiune în jurul unui punct din centrul demasă al elementului de volum dV=dxdydz, se determină ţinând seama că aceste valorisunt prin ipoteză funcţii continue de coordonatele punctului respectiv: deci pentruvariaţiile dx, dy, dz ale elementului creşterile acestor tensiuni vor fi egale cudiferenţialele lor “parţiale” în raport cu variabilele respective ( din cauza număruluiprea mare al acsetor tensiuni , în fig 13.3 sunt reprezentate numai variaţiilecomponentelor orientate după axa Ox):
x
y
z
δx
Fig. 13.2
O
δz
δy
ε
n
εxεy
εzγxy
γyz
γzx
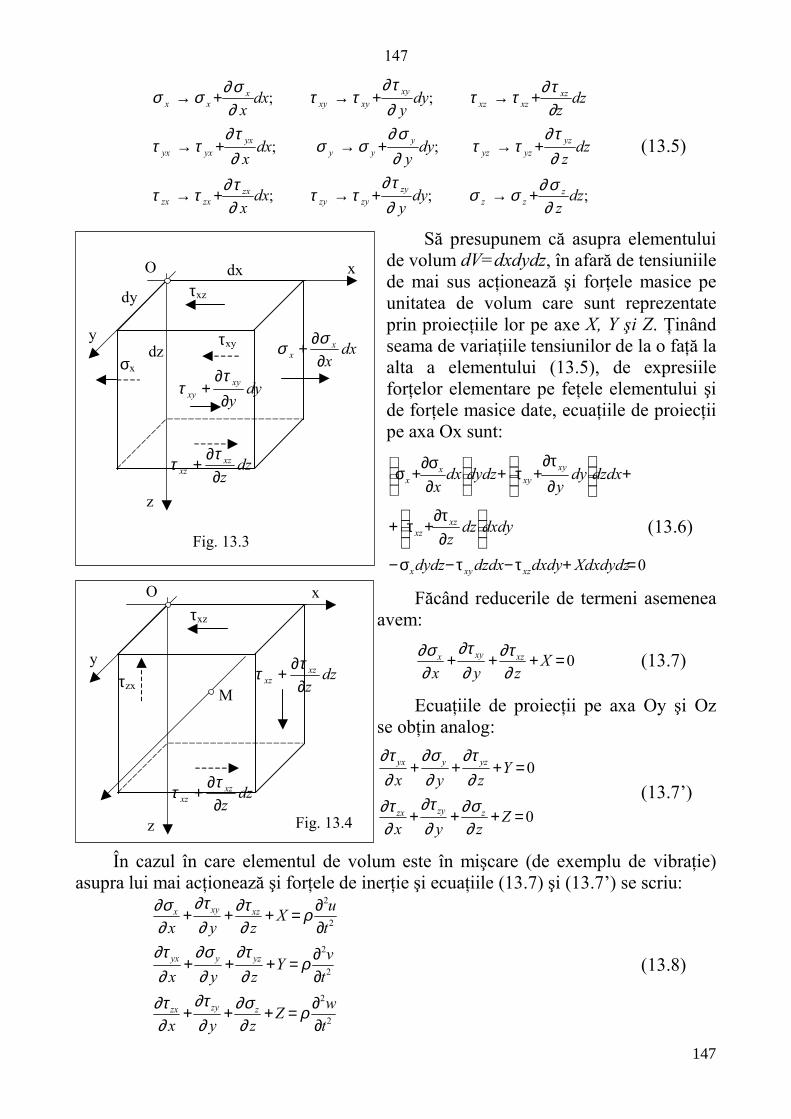
147
147
;;;
;;
;;
dzz
dyy
dxx
dzz
dyy
dxx
dzz
dyy
dxx
zzz
zyzyzy
zxzxzx
yzyzyz
yyy
yxyxyx
xzxzxz
xyxyxy
xxx
∂σ∂σσ
∂τ∂
ττ∂τ∂
ττ
∂τ∂
ττ∂σ∂
σσ∂τ∂
ττ
∂τ∂
ττ∂τ∂
ττ∂σ∂
σσ
+→+→+→
+→+→+→
+→+→+→
(13.5)
Să presupunem că asupra elementuluide volum dV=dxdydz, în afară de tensiuniilede mai sus acţionează şi forţele masice peunitatea de volum care sunt reprezentateprin proiecţiile lor pe axe X, Y şi Z. Ţinândseama de variaţiile tensiunilor de la o faţă laalta a elementului (13.5), de expresiileforţelor elementare pe feţele elementului şide forţele masice date, ecuaţiile de proiecţiipe axa Ox sunt:
0=+τ−τ−σ−
∂τ∂
+τ+
+
∂τ∂
+τ+
∂σ∂
+σ
Xdxdydzdxdydzdxdydz
dxdydzz
dzdxdyy
dydzdxx
xzxyx
xzxz
xyxy
xx
(13.6)
Făcând reducerile de termeni asemeneaavem:
0=+++ Xzyxxzxyx
∂τ∂
∂τ∂
∂σ∂ (13.7)
Ecuaţiile de proiecţii pe axa Oy şi Ozse obţin analog:
0
0
=+++
=+++
Zzyx
Yzyx
zzyzx
yzyyx
∂σ∂
∂τ∂
∂τ∂
∂τ∂
∂σ∂
∂τ∂
(13.7’)
În cazul în care elementul de volum este în mişcare (de exemplu de vibraţie)asupra lui mai acţionează şi forţele de inerţie şi ecuaţiile (13.7) şi (13.7’) se scriu:
2
2
2
2
2
2
twZ
zyx
tvY
zyx
tuX
zyx
zzyzx
yzyyx
xzxyx
∂∂=+++
∂∂=+++
∂∂=+++
ρ∂σ∂
∂τ∂
∂τ∂
ρ∂τ∂
∂σ∂
∂τ∂
ρ∂τ∂
∂τ∂
∂σ∂
(13.8)
x
y
z
σx
dxx
xx ∂
∂+σστxy
τxz
Fig. 13.3
O
dyyxy
xy ∂∂
+τ
τ
dzzxz
xz ∂∂
+ττ
dx
dy
dz
x
y
z
τxz
Fig. 13.4
O
dzzxz
xz ∂∂
+ττ
dzzxz
xz ∂∂
+ττ
Mτzx

148
148
În absenţa forţelor masice şi de inerţie ecuaţiile (13.8) se scriu:
0
0
0
=++
=++
=++
zyx
zyx
zyx
zzyzx
yzyyx
xzxyx
∂σ∂
∂τ∂
∂τ∂
∂τ∂
∂σ∂
∂τ∂
∂τ∂
∂τ∂
∂σ∂
(13.9)
Scriind ecuaţia de momente a celor 4 forţe elementare corespunzătoare tensiunilortangenţiale pe cele patru feţe faţă de axa paralelă cu Oy ce trece prin centrul M alelementului de volum (singurele care dau momente, vezi fig. 13.4) avem:
02222=⋅
++⋅
+−⋅−⋅ xddydzdx
xdzdxdydz
zdxdydzdzdxdy zx
zxxz
xzzxxz ∂τ∂τ
∂τ∂τττ (13.9)
Dacă se neglijează termenii infinit mici de ordinul patru în comparaţie cutermenii infinit mici de ordinul trei şi se fac reducerile de termeni asemenea, rezultă:
( ) 0=− dydzdxzxzx ττ şi deoarece dxdydz ≠ 0 rezultă : zxxz ττ = (13.10)
Acestă relaţie exprimă legea dualităţii tensiunilor tangenţialeÎn mod similar se dovedeşte valabilitatea acestei legi pentru celelalte două
tensiuni tangenţiale.Ecuaţiile diferenţiale ale echilibrului elastic sunt stabilite pentru o zonă oarecare
din interiorul corpului. Dacă zona respectivă este situată în vecinătatea conturuluicorpului, atunci trebuiesc scrise anumite relaţii de echilibru care poartă numele decondiţii pe contur.
Se consideră elementul de volum tetraedricdin vecinătatea conturului pentru care secunoaşte forţa elemntară de suprafaţă f (forţape contur), ce acţionează pe suprafaţaelementară de contur notată în fig. 13.5 cuABC.Ecuaţiile de echilibru în proiecţii pe cele treiaxe se scriu:
000
=−−−=−−−=−−−
AnAmAlAfAnAmAlAfAnAmAAf
zzyzxz
yzyyxy
xzxyxx
στττστττσ !
⇒
000
=++==++==++=
nmfnmfnmf
zzyzxz
yzyyxy
xzxyxx
στττστττσ
!
!
!
(13.11)
Ecuaţiile echilibrului elastic şi condiţiile pe contur se mai numesc ecuaţiilestatice ale Teoriei Elasticităţii.
x
y
z
fx
Fig. 13.5
O
fz
fy
f n
τzx
σz
τyx
ττzy
σx
σzτyzτxy
A
B
C
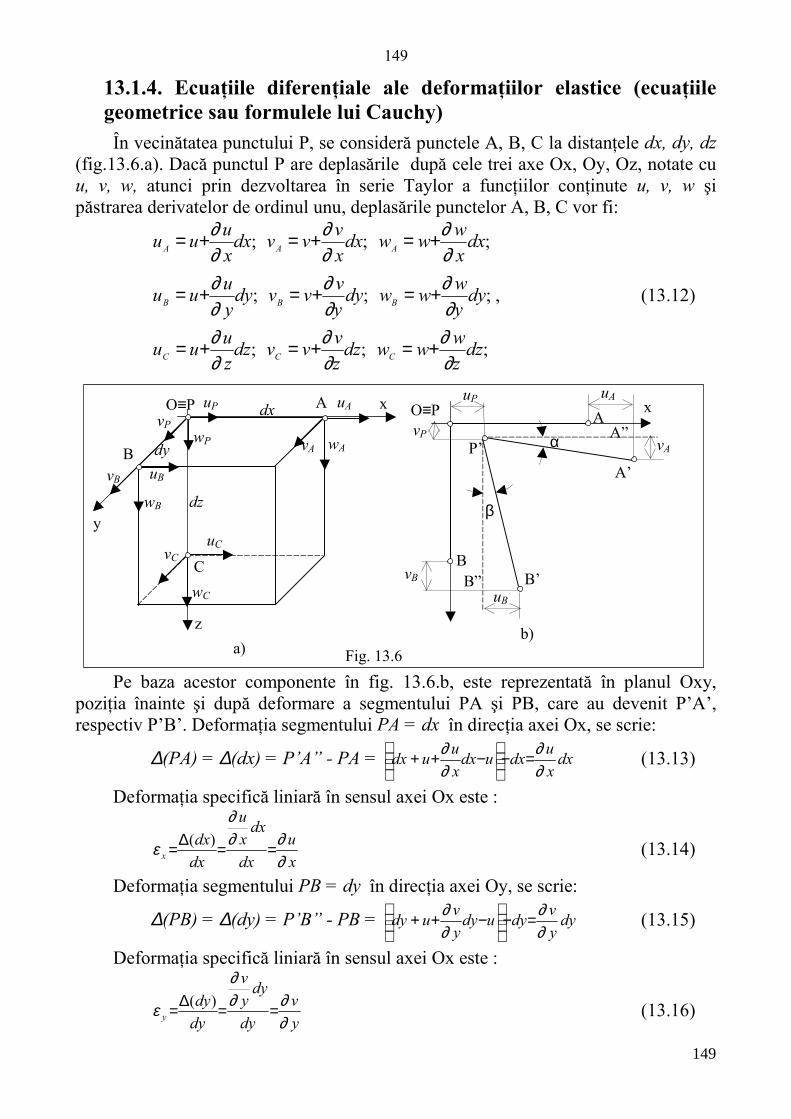
149
149
13.1.4. Ecuaţiile diferenţiale ale deformaţiilor elastice (ecuaţiilegeometrice sau formulele lui Cauchy)În vecinătatea punctului P, se consideră punctele A, B, C la distanţele dx, dy, dz
(fig.13.6.a). Dacă punctul P are deplasările după cele trei axe Ox, Oy, Oz, notate cuu, v, w, atunci prin dezvoltarea în serie Taylor a funcţiilor conţinute u, v, w şipăstrarea derivatelor de ordinul unu, deplasările punctelor A, B, C vor fi:
;;;
;;;
;;;
dzzwwwdz
zvvvdz
zuuu
dyywwwdy
yvvvdy
yuuu
dxxwwwdx
xvvvdx
xuuu
CCC
BBB
AAA
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
+=+=+=
+=+=+=
+=+=+=
, (13.12)
Pe baza acestor componente în fig. 13.6.b, este reprezentată în planul Oxy,poziţia înainte şi după deformare a segmentului PA şi PB, care au devenit P’A’,respectiv P’B’. Deformaţia segmentului PA = dx în direcţia axei Ox, se scrie:
∆(PA) = ∆(dx) = P’A” - PA = dxxudxudx
xuudx
∂∂
∂∂ =−
−++ (13.13)
Deformaţia specifică liniară în sensul axei Ox este :
xu
dx
dxxu
dxdx
x ∂∂∂
∂
ε ==∆= )( (13.14)
Deformaţia segmentului PB = dy în direcţia axei Oy, se scrie:
∆(PB) = ∆(dy) = P’B” - PB = dyyvdyudy
yvudy
∂∂
∂∂ =−
−++ (13.15)
Deformaţia specifică liniară în sensul axei Ox este :
yv
dy
dyyv
dydy
y ∂∂∂
∂
ε ==∆= )( (13.16)
x
y
z
uA
Fig. 13.6
O≡P dx
a)
A
wAvA
uP
wPB
C
dz
dy
vP
vB uB
wB
uCvC
wC
b)
O≡P xuA
vA
uP
vP
vB
uB
A
A’
B’B
P’A”
B”
β
α

150
150
În mod analog se găseşte:zw
z ∂∂ε = (13.17)
Pentru unghiul de rotire al muchiei PA în planul Oxy avem :
xu
xv
udxxuudx
vdxxvv
APAAtg
∂∂∂∂
∂∂
∂∂
α+
=−++
−+=′′′′′
=1
(13.18)
Dacă se neglijează la numitor termenul xxu ε
∂∂ = în raport cu 1, rezultă:
xvtg
∂∂αα =≈ (13.19)
În mod analog, pentru unghiul de rotire al muchiei PB în planul Oxy:
yutg
∂∂ββ =≈ (13.20)
Prin urmare, deformaţia unghiulară sau lunecarea specifică γxy, care estemodificarea unghiului drept în planul Oxy (fig.4.3.b) are valoarea:
yu
xv
xy ∂∂
∂∂βαγ +=+= (13.21)
În mod analog se obţin modificările de unghiuri în celelalte două plane :
γ∂∂
∂∂y z
wy
vz
= + ; γ ∂∂
∂∂z x
uz
wx
= + (13.22)
În consecinţă, între deformaţiile specifice liniare în punctul curent P(x, y, z)lunecările specifice în planele Oxy, Oyz, Ozx şi deplasările u, v, w din punctul Pexistă relaţiie diferenţiale:
ε∂∂
ε∂∂
ε
x
y
z
uxvy
d wd z
=
=
=
,
,
+=
+=
+=
yu
xv
yu
xv
yu
xv
yx
yx
yx
∂∂
∂∂γ
∂∂
∂∂γ
∂∂
∂∂γ
(13.23)
Dacă variaţia deplasărilor din punctul curent P se notează prin vectorii:
δ
∂∂∂∂∂∂
x
uxvxwx
=
, δ
∂∂∂∂∂∂
y
uyvywy
=
, δ
∂∂∂∂∂∂
z
uzvzwz
=
(13.24)
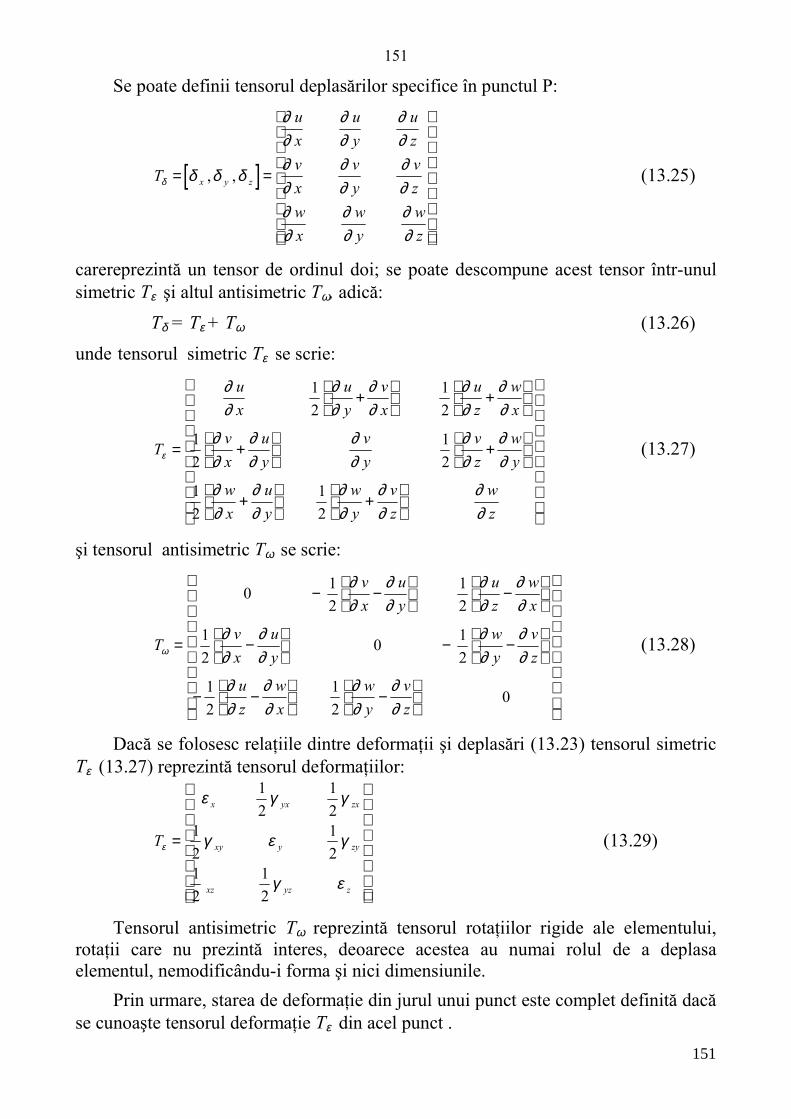
151
151
Se poate definii tensorul deplasărilor specifice în punctul P:
[ ]T
ux
uy
uz
vx
vy
vz
wx
wy
wz
x y zδ δ δ δ
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
= =
, , (13.25)
carereprezintă un tensor de ordinul doi; se poate descompune acest tensor într-unulsimetric Tε şi altul antisimetric Tω, adică:
Tδ = Tε + Tω (13.26)
unde tensorul simetric Tε se scrie:
T
ux
uy
vx
uz
wx
vx
uy
vy
vz
wy
wx
uy
wy
vz
wz
ε
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=
+
+
+
+
+
+
12
12
12
12
12
12
(13.27)
şi tensorul antisimetric Tω se scrie:
T
vx
uy
uz
wx
vx
uy
wy
vz
uz
wx
wy
vz
ω
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=
− −
−
−
− −
− −
−
0 12
12
12
0 12
12
12
0
(13.28)
Dacă se folosesc relaţiile dintre deformaţii şi deplasări (13.23) tensorul simetricTε (13.27) reprezintă tensorul deformaţiilor:
T
x yx zx
xy y zy
xz yz z
ε
ε γ γ
γ ε γ
γ ε
=
12
12
12
12
12
12
(13.29)
Tensorul antisimetric Tω reprezintă tensorul rotaţiilor rigide ale elementului,rotaţii care nu prezintă interes, deoarece acestea au numai rolul de a deplasaelementul, nemodificându-i forma şi nici dimensiunile.
Prin urmare, starea de deformaţie din jurul unui punct este complet definită dacăse cunoaşte tensorul deformaţie Tε din acel punct .

152
152
13.1.5. Condiţiile de continuitate ale deformaţiilor elastice (ecuaţiilelui Saint Venant).Dacă se dau diferite valori ale deplasărilor după cele teri axe (u, v, w), formulele
lui Cauchy permit calculul celor 6 componente ale deformaţiei (εx, εy, εz, γxy, γyz, γzx.)În schimb dacă se cunosc componentele deformaţiei, nu se pot obţine valorideterminate ale componentelor deplasării. Deci între componentele deformaţieitrebuie să existe anumite relaţii matematice care să exprime faptul că materialulcorpului este un mediu continuu care îşi păstrează acestă proprietate şi dupădeformarea corpului. Aceste relaţii sunt de două feluri:! relaţii între componentele deformaţiilor situate în acelaşi plan
Se derivează parţial relaţiile (13.14), (13.16), (13.21) după cum urmează:
( ) ( )
( )yx
vyxu
yxxv
yu
yxv
xyv
yxu
yxu
xyxy
yyxx
∂+
∂=
∂∂∂+=
∂=
∂∂=
∂=
∂∂=
2
3
2
32
2
3
2
2
2
3
2
2
;
;;;
∂∂
∂∂γ
∂∂
∂∂γ
∂∂ε
∂∂ε
∂∂ε
∂∂ε
(13.30)
Rezultă deci următoarele relaţii :
xzzx
zyyz
yxxy
zxxz
yzzy
xyyx
∂∂∂
=∂∂
+∂∂
∂∂∂
=∂∂+
∂∂
∂∂∂
=∂∂
+∂∂
γεε
γεε
γεε
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
(13.31)
! relaţii între componentele deformaţiilor situate în plane diferite:Se derivează parţial relaţiile (13.21), (13.22) după cum urmează:
zyu
yxw
y
yxw
xzv
x
xzv
zyu
z
zx
yz
xy
∂+
∂=
∂∂
∂+
∂=
∂∂
∂+
∂=
∂∂
∂∂
∂∂γ
∂∂
∂∂γ
∂∂
∂∂γ
22
22
22
(13.32)
Însumând primele două relaţii membru cu mebru şi scăzând a treia se obţine:
xzv
yxzzxyzxy
∂=
∂∂
−∂∂
+∂∂
∂∂γγγ 2
2 (13.33)
! Derivând parţial în raport cu y se obţin relaţii între componentele deformaţiilorsituate în plane diferite:
xzzyxv
yxzyyzxyzxy
∂∂ε
∂∂∂γγγ 23
22∂
=∂
=
∂∂
−∂∂
+∂∂
∂∂ (13.34)

153
153
În mod analog se obţine:
yxzyxw
zyxz
zyzyxu
xzyx
zxyzxyz
xyzxyzx
∂∂ε
∂∂∂γγγ
∂∂ε
∂∂∂γγγ
23
23
22
...
22
∂=
∂=
∂∂
−∂∂
+∂∂
∂∂
∂=
∂=
∂∂
−∂∂
+∂∂
∂∂
(13.34’)
Cele 6 ecuaţii care leagă cele 6 deformaţii specifice se numesc condiţiile decontinuitate sau ecuaţiile lui Saint Venant.
13.1.6. Legea lui Hooke generalizată (ecuaţiile fizice)În cazul general, forma relaţiei tensiuni - deformaţii σ =f(ε) reflectă de fapt
dependenţa între componentele tensorului tensiune Tσ şi componentele tensoruluideformaţie Tε adică:
Tε = f (Tσ ) (13.35)
Dacă funcţia f(ε) este o funcţie liniară, acesta conduce la o corespondenţăbiunivocă între Tε şi Tσ şi relaţia (13.35) poartă denumirea de legea lui Hookegeneralizată.
Pentru a găsi forma concretă a legii (13.35) vom examina din nou un element devolum din corp de forma unui paralelipiped în cazul general al stării de tensiune dinspaţiu (fig.13.1). Relaţia dintre tensiuni şi deformaţii în starea de tensiune spaţială sepoate exprima cu uşurinţă prin extinderea legii lui Hooke de la întinderea -compresiunea simplă şi lunecarea simplă pentru care avem relaţiile binecunoscute:
GE γτεσ == ; (13.36)
Posibilitatea practică de a face această extrapolare se justificată prin determinăriexperimentale pentru multe din materialele folosite în tehnică, dacă sunt respectateurmătoarele condiţii (ipoteze de bază):! prezenţa simultană a tuturor componentelor tensorului tensiune, la fel ca şi
prezenţa lor separată (dacă aceasta este posibilă), menţine materialul în domeniuldeformaţiilor elastice;
! materialul poate fi considerat izotrop;! deformaţiile sunt foarte mici în comparaţie cu dimensiunile corpului;! procesul deformaţiei este izotermic.
Aceste condiţii fac posibilă aplicarea principiului suprapunerii efectelor,considerând volumul elementar acţionat pe rând de perechile de tensiuni normale σx,σy, σz, τyz, τzx, τyx . Se consideră paralelipipedul elementar acţionat de tensiunile σx, (fig.13.7):

154
154
acesta prezintă o întindere monoaxială
producând după direcţia Ox alungirea E
xx
σε =′
şi contracţiile biaxiale după direcţiile normaleOy şi Oz:
E
xxzy
σνενεε −=′−=′=′ , (13.37)
unde E este modulul de elasticitatelongitudinal şi ν coeficientul lui Poisson.Admiţând apoi că asupra paralelipipeduluielementar acţionează numai tensiunile σy
respectiv numai σz , prin raţionamenteanaloage obţinem:
EEy
yzxy
y
σνενεε
σε −=′′−=′′=′′=′′ , (13.37’)
EEz
zyxz
z
σνενεεσε −=′′′−=′′′=′′′=′′′ ,
Prin suprapunerea efectelor celor trei încărcări independente, deformaţiilespecifice ale elementului (fig.5.5.a) după cele trei direcţii vor fi date de :
( )[ ]zyxzyx
xxxx EEEEσσνσσν
σνσεεεε +−=−−=′′′+′′+′= 1
( )[ ]xzyzyx
yyyy EEEEσσνσσν
σνσεεεε +−=−−=′′′+′′+′= 1 (13.38)
( )[ ]yxzzyx
zzzz EEEEσ+σν−σ=σν−
σν−σ=ε ′′′+ε ′′+ε′=ε 1
Admiţând apoi că asupraparalelipipedului elementar (fig. 13.8)acţionează numai tensiunile tangenţiale τxz =τzx , se va produce o deformare unghiulară afeţelor paralele cu planul Oxz, fără a sedeforma celelalte feţe ale paralelipipedului.Conform legii lui Hooke scrisă sub forma(13.37) putem scrie:
0, =′=′=′ yzxyzx
zx yG
γτγ (13.39)
unde G este modulul de elasticitatetransversal.
În mod analog, dacă asupra paralelipipedului elementar (fig. 13.8) acţioneazănumai tensiunile tangenţiale τyz=τzy respectiv τxy=τyx vom obţine:
dx
y
zFig. 13.7
O≡P
σx
σx
ε’x
dyε’y
dz
ε’z
x
y
z
τxz
Fig. 13.8
O
τxz
γxz

155
0, =′′=′′=′′ xyzxyz
yz Gγγ
τγ (13.39’)
0, =′′′=′′′=′′′ zxyzxy
xy Gγγ
τγ
Aplicând principiul suprapunerii efectelor acţiunii tuturor componentelortensorului tensiune rezultă următoarele componente ale tensorului deformaţie:
( )[ ]GE
xyxyzyxx
τγσσνσε =+−= ,1
( )[ ]GE
yzyzxzyy
τγσσνσε =+−= ,1 (13.40)
( )[ ]GE
zxzxyxzz
τγσσνσε =+−= ,1
Formulele (13.40) exprimă relaţiile care există între componentele deformaţieişi componentele tensiunilor. Uneori este necesar să se exprime tensiunile în funcţiede deformaţii. Este uşor de observat că se obţin relaţiile:
xyxymxx GE γτεν
νεν
σ =
−
++
= ,21
31
yzyzmyy GE γτεν
νεν
σ =
−
++
= ,21
31
, (13.41)
zxzxmzz GE γτεν
νεν
σ =
−
++
= ,21
31
.
unde s-a notat cu εm deformaţia medie: ( )zyxm εεεε ++=31 (13.42)
13.1.7 Variaţia tensiunilor din interiorul unui corp. Tensiuni şidirecţii principale. Elipsoidul tensiunilor. Tensiuni octaedrice.Cercurile tensiunilora. Tensiuni şi direcţii principaleSe izolează, dintr-un corp, un tetraedru elementar având laturile OA = dx, OB =
dy, OC = dz, pe feţele căruia s-au introdus tensiunile corespunzătoare (fig. 13.9),astfel:1. pe feţele ortogonale din planele de coordonate acţionează tensiunile σx, σy, σz,
τxy, τyz, τzx
2. iar pe faţa înclinată de arie dA, a cărei normală ν are cosinuşii directori != cos( n ,Ox) = =cosα, m = cos(n , Oy)= cosβ, n=cos(n , Oz)=cosγ, acţioneazăvectorul tensiune p având componentele : px , py , pz .

156
Feţele ortogonale au ariile şitensiunile respectiv:- Aria (OBC) = dAx = ! dA, cutensiunile : σx, τxy, τzx.- Aria (OAC) = dAy = m dA, cutensiunile: τyx, σy, τyz. (13.43)- Aria (OAB) = dAz = n dA, cutensiunile : τzx , τzy , σz.
Proiecând pe axele de coordonatetoate forţele care acţionează asupratetraedrului se obţine respectiv:
(13.44)
px ⋅ dA - σx dAx - τxy dAy - τxzdAz = 0py ⋅ dA - τyx dAx - σy dAy - τyzdAz = 0pz ⋅ dA - τzx dAx - τzy dAy - σ z dAz = 0
Împărţind cu dA şi ţinând seama de relaţiile (13.42) se obţine:
px = σx ! + τxy m + τxz npy = τyx ! + σy m + τyz n (13.45)
pz= τzx ! + τzy m + σ z n
sau matricial:
=
nm
ppp
zyzxz
zyyxy
zxyxx
z
y
x !
στττστττσ
(13.46)
sau: nTp σ= (13.47)
Rezultă tensiunea totală:222zyx pppp ++= (13.48)
Dacă se descompune tensiunea totală p după direcţia normalei n şi o direcţiedin planul secţiunii ABC situată în acelaşi plan cu p şi n , se poate exprimatensiunea normală σ ca proiecţie a tensiunii p pe direcţia normalei n :
!!!
!
nmnmnm
npmppppr
zxyzxyzyx
zyx
⋅+⋅+⋅+++=
=++==
τττσσσ
σ ν
222222(13.49)
Tensiunea tangenţială de pe faţa ABC se poate obţine cu relaţia: .22 στ −= p sau:
( )!!! nmnmnmppp zxyzxyzyxxxx ⋅+⋅+⋅+++−++= τττσσστ 2222222222 (13.50)
x
y
z
px
Fig. 13.9
O
pz
py
p n
τzx
σz
τyx
ττzy
σx
σzτyz
τxy
A
B
C

157
Există însă secţiuni având o anumită orientare a normalei n pentru caretensiunile tangenţiale sunt nule. Să considerăm în continuare că suprafaţa BCD dinfig. 13.9 este o astfel de secţiune. În acest caz putem scrie σ≡p şi 0=τ , iar relaţiile(13.45) devin:
npmpp zyx ⋅=⋅=⋅= σσσ ;;! (13.51)
Se înlocuiesc aceste relaţii în (13.45) şi se obţine:( )
( )( ) .0
;0;0
=−++=+−+=++−
nmnmnm
zzyzx
yzyyx
xzxyx
σστττσστττσσ
!
!
!
(13.52)
Rezultă astfel un sistem de ecuaţii omogene având ca necunoscute cosinuşiidirectori ! , m, n cu următoarea legătură între ele:
.1222 =++ nm! (13.53)Pentru ca sistemul de ecuaţii omogene (13.52) să prezinte soluţii diferite de
zero, este necesar ca determinantul său să fie nul:
0=−
−−
σστττσστ
ττσσ
zzyzx
yzyyx
xzxyx
(13.54)
Dezvoltarea acestui determinant conduce la următoarea ecuaţie de gradul III în σ : ;032
21
3 =−+− III σσσ (13.55)
care admite trei rădăcini reale numite tensiuni principale: .321 σσσ >>
Coeficienţii acestei ecuaţii se numesc invariaţii stării generale de solicitare şiau următoarele expresii:
zyxI σσσ ++=1 (13.56)
;222
2
zxyzxyxzzyyx
xxz
zxz
zzy
yzy
yyx
xyxI
τττσσσσσσ
σττσ
σττσ
σττσ
−−−++=
=++=(13.57)
zzyzx
yzyyx
xzxyx
Iστττστττσ
=3 (13.58)
Dacă se înlocuiesc, pe rînd, tensiunile principale ,,, 321 σσσ determinate, însistemul de ecuaţii (5.45) şi se rezolvă ţinând seama de (13.52), se găsesc cosinuşiidirectori ! i , mi , ni ai normalelor la secţiunile principale (numite şi direcţiiprincipale):
.n,m,;n,m,;n,m, 333322221111 !!! ⇒σ=σ⇒σ=σ⇒σ=σ (13.59)

158
Asa cum rezultă la pararaful 13.2 pentru tensiunile tangenţiale se găsesc treivalori extreme:
22213
133132
322321
2112
σ−σ=τ=τσ−σ=τ=τσ−σ=τ=τ ;; (13.60)
Deoarece există de relaţia de ordine ,321 σσσ >> rezultă 3113 τ=τ=τ max
Se demonstrează la pararaful 13.2 că planele în care acţionează tensiuniletangenţiele maxime sau minime sunt planele bisectoare ale unghiurilor diedre definitede secţiunile principale, luate două câte două.
Se consideră un cub elementar având dx=dy=dz, orientat după direcţiileprincipale: cele două secţiuni în care acţionează tensiunile tangenţiale 12τ şi 21τ suntperpendiculare între ele şi sunt dispuse la 450 faţă de secţiunile principale pe careacţionează tensiunile 1σ şi 2σ (fig.13.10). În mod similar se găsesc secţiunile pe caresecţiunile pe care acţionează:
3223 τ=τ şi 1331 τ=τ . (13.61)
b. Elipsoidul tensiunilorSe consideră expresia tensiunii normale ,σ de pe o faţă înclinată oarecare
ABC (fig. 13.9):
!!! nmnmnm zxyzzyzyx τττσσσσ 222222 +++++= (13.62)
Pe normala la suprafaţa ABC, cuse ia un vector v" , coliniar ,σ devaloare:
;σkv ±= (13.63)
de unde:
,2
2
vk=σ (13.64)
Dacă proiecţiile vectorului v" , pe axele de coordonate, sunt:
Fig. 13.10
1
2
3
O
τ12
τ21
1
2
3
O
τ32τ23
1
2
O
τ31τ13
3
a. b. c.
x
y
z
Fig. 13.11
Oσ1
σ2
σ3

159
nvzmvyvx ⋅=⋅=⋅= ;;! (13.65)atunci cosinuşii directori ai normalei la suprafaţa ABC sunt:
.;;vzn
vym
vx ===! (13.66)
Se înlocuiesc expresiile (13.66) şi (13.64) în (13.62) şi se obţine:
2
2
2222
2
2
2
2
2
222vk
vzx
vyz
vxy
vz
vy
vx
zxyzxyzyx =+++++ τττσσσ (13.67)
După simplificarea cu v2, rezultă:2222 222 kzxyzxyzyx zxyzxyzyx =⋅+⋅+⋅+⋅+⋅+⋅ τττσσσ (13.68)
Aceasta este ecuaţia unei cuadrice şi reprezintă suprafaţa generată de vârfulvectorului σ" orientat după normala la planul ABC, când aceasta are toate orientărileposibile din spaţiu. Forma concretă a cuadricei depinde de valoarea constanteiarbitrare k. Dacă se face o rotire convenabilă a sistemului de axe, se obţine anulareatermenilor care conţin tensiunile tengenţiale şi se obţin direcţiile principale (σx=σ1;σy=σ2; σz=σ3). Relaţiile (13.68) devin:
223
22
21 kzyx =⋅+⋅+⋅ σσσ (13.69)
În acest caz, relaţiile (13.45) devin:;;; 321 npmpp zyx ⋅=⋅=⋅= σσσ ! (13.70)
iar relaţia (13.62) se scrie:2
32
22
1 nm ⋅+⋅+⋅= σσσσ ! (13.71)Din expresiile (13.70) se scot cosinuşii directori:
.;;321 σσσzyx pn
pmp ===! (13.72)
care se înlocuiesc în (13.53), obţinându-se:
.123
2
22
2
21
2
=++σσσ
zyx ppp (13.73)
A rezultat ecuaţia unui elipsoid, raportat la axele sale (fig. 13.11), denumitelipoidul tensiunilor sau elipsoidul lui Lame de semiaxe .,, 321 σσσ === OCOBOA
c. Tensiuni octaedriceOctaedrul este un volum cu opt feţe
triunghiulare, egal înclinate faţă de sistemultriortogonal de axe (fig. 5.14) În acest cazpentru normalele la cele opt feţe avem:
33=== nm! care rezultă din condiţia:
;1222 =++ nm! (13.74)
x
y
z
τoct
Fig. 13.12
O
σoct
octv

160
Având în vedere că: ;;; 321 npmplp ZYX ⋅=⋅=⋅= σσσ (13.75)
rezultă: ( ) 323
22
21
222 /pppp zyxoct σ+σ+σ=++= (13.76)
şi: ( ) medoct /nml σ=σ+σ+σ=σ+σ+σ=σ 33212
32
22
1 (13.77)
Deci, tensiunea normală pe una din feţele octaedrului, este egală cu mediatensiunilor principale . Rezultă tensiunea tangenţială octaedrică:
( )
( ) ( ) ( ) 23
22
21
213
232
221
2321
23
22
2122
32
31
93
τττσσσσσσ
σσσσσσστ
++=−+−+−=
=++−++=−= octoctoct p(13.78)
d. Cercurile tensiunilorSe consideră relaţiile 13.48 şi 13.70:
;nmpppp zyx2222
322
222
12222 τ+σ=σ+σ+σ=++= !
;nm 23
22
21 σ+σ+σ=σ ! (13.79)
.nm 1222 =++! (13.80)Se procedează la eliminarea lui m2 şi n2, între aceste trei relaţii. În acest scop,
din relaţia (13.80) rezultă:
;mn 222 1 −−= ! (13.81)şi se înlocuieşte în cele două relaţii precedente:
( ) ;mm 222223
222
221 1 τ+σ=−−σ+σ+σ !! (13.82)
( );mm 223
22
21 1 −−σ+σ+σ=σ !! (13.83)
care se pot scrie forma:
( ) ( ) ;m 23
22223
22
223
21 σ−τ+σ=σ−σ+σ−σ ! (13.84)
( ) ( ) .m 32
322
31 σ−σ=σ−σ+σ−σ ! (13.85)
Relaţia (13.85) se înmulţeşte cu ,32 σ+σ astfel încât:
( )( ) ( ) ( )( ).m 32322
322
23231 σ+σσ−σ=σ−σ+σ+σσ−σ ! (13.86)
Prin scăderea relaţiilor (13.84)şi (13.86) se obţine:
( ) ( ) ( )[ ] ( )( );32323
222323131 σ+σσ−σ−σ−τ+σ=σ+σ−σ+σσ−σ ! (13.87)
respectiv, după transformările de rigoare se obţine:
( )( ) ( )( ) ;23121
232 !σ−σσ−σ=τ+σ−σσ−σ (13.88)

161
Dacă se procedează similar, eliminând n2 şi ! 2, respectiv ! 2 şi m2, rezultă altedouă expresii, de formă asemănătoare, astfel încât se obţin relaţiile:
( )( ) ( )( )( )( ) ( )( )( )( ) ( )( ) .n
;m;
22313
221
21232
213
23121
232
σ−σσ−σ=τ+σ−σσ−σσ−σσ−σ=τ+σ−σσ−σ
σ−σσ−σ=τ+σ−σσ−σ !
(13.89)
Pentru cazul particular, când ,cos, 01900 ==α=α prima dintre relaţiile(13.89)devine:
( )( ) .0232 =τ+σ−σσ−σ (13.90)
Aceasta reprezintă ecuaţia unui cerc cu centrul C1
σ+σ 0
232 , şi raza
232
1σ−σ=r
ca în fig. 13.13.
În mod similar, pentru ,0,900 == mβ a doua relaţie devine ecuaţia unui cerc,
( )( ) ,0213 =τ+σ−σσ−σ cu centrul C2
σ+σ 0
213 , şi raza
213
2σ−σ=r .
Pentru 0900 ==γ n, a treia relaţie devine ecuaţia unui alt cerc,
( )( ) 0221 =τ+σ−σσ−σ cu centrul C3
σ+σ 0
221 , şi raza
221
3σ−σ=r .
Se poate arăta că o stare oarecarede tensiune se poate reprezenta, înplanul ,στO printr-un punct situatîn afara cercului C1 şi a cerculuiC3, dar în interiorul cercului C2.Într-adevăr, dacă este valabilărelaţia de ordonare a tensiunilorprincipale, ,321 σσσ >> pentru
000 ≠≠≠ n,m,! se obţine:
( )( )( )( )( )( ) ;n
;m;
00
0
22313
21232
23121
>σ−σσ−σ<σ−σσ−σ
>σ−σσ−σ !
(13.91)
care introduse în relaţiile (13.89) conduc respectiv la inegalităţile:
( )( )( )( )( )( ) 0
;0;0
221
213
232
>+−−<+−−>+−−
τσσσστσσσστσσσσ
(13.92)
şi care reprezintă tocmai zonele haşuarate situate în afara cercului C1 şi a cercului C3şi în interiorul cercului C2, ceea ce confirmă afirmaţia de mai sus.
τ
Fig. 13.13
σO C1 C2 C3
σ1
σ2
σ3

162
13.1.8. Variaţia deformaţiilor din interiorul unui corp. Deformaţiişi direcţii principale. Relaţia dintre constantele elastice E, G şi νννν
a. Deformaţii şi direcţii principaleSă considerăm un sistem de axe Oxyz şi un corp raportat la acest sistem de axe.
Acum, după ce deformaţiile normale şi tangenţiale în raport cu axele x, y, z au fostdefinite, să considerăm deformaţia normală într-o direcţie oarecare "n (fig.13.14).
Fie punctele infinit vecine M (x, y, z) şi N (x+ dx, y + dy, z + dz) care aparţin corpuluişi care după deformare devin respectiv M1(x1, y1, z1) şi N1 (x1 + dx1, y1 + dy1, z1 +dz1) adică după deformare segmentul MNdevine segmentul 11NM astfel cădeformaţia specifică în punctul M (asegmentului MN ) se defineşte prin:
dsdsds
MN
MNNM −=−
=ε 111 (13.93)
unde:22222 dzdydxMNds ++== (13.94)21
21
21
21
21 dzdydxMNds ++== (13.95)
şi x1 = x + u ⇒ dx1 = dx + du,y1 = y + v ⇒ dy1 = dy + dv, (13.96)z1 = z + w ⇒ dz1 = dz + dw.
Ridicând la pătrat relaţia (13.93)şi ordonând termenii se obţine :
)(sdsd 122221 +ε+ε= (13.97)
unde dacă ţinem seama de ipoteza micilor deformaţii, se neglijează termenii deordinul doi (ε2 = 0) obţinem: 22
122 sdsdsd −=ε (13.98)
Ţinând seama de formulele (13.94), (13.95) şi (13.96) membrul drept alecuaţiei (13.98) devine:
2222 22 dwdvdu)dwdzdvdydudx(sd +++++=ε (13.99)
Ţinând seama de relaţiile diferenţialelor du, dv, şi dw:
dzzudy
yudx
xudu
∂∂+
∂∂+
∂∂=
dzzvdy
yvdx
xvdv
∂∂+
∂∂+
∂∂= (13.100)
dzzwdy
ywdx
xwdw
∂∂+
∂∂+
∂∂=
x
y
z Fig. 13.14
O≡M
N
N1
M1
dx
dy
dz

163
şi neglijând termenii de ordinul doi du2, dv2, şi dw2 relaţia (13.99) devine:
( ) ( ) ( )
dzdxzu
xwdydz
yw
zv
dxdyxv
yudz
zwdy
yvdx
xuds
∂∂+
∂∂+
∂∂+
∂∂+
+
∂∂+
∂∂+
∂∂+
∂∂+
∂∂=ε 2222
(13.101)
Împărţind membru cu membru cu ds2 şi ţinând seama de relaţiile :
!== )x,n(cossdxd , m)y,n(cos
sdyd == , n)z,n(cos
sdzd == . (13.102)
precum şi de relaţiile (13.23) rezultă relaţia (13.3):ε = εx ! 2 + εy m2 + εz n2 + γx y ! m + γy z m n + γz x n ! (13.103)
Prin urmare, deformaţia specifică a unui segment oarecare care trece printr-unpunct oarecare M (x, y, z) poate fi exprimată în funcţie de cele şase componente aledeformaţiei definite în raport cu axele de coordonate (vezi fig. 13.2). Prin urmare,componentele deformaţiei pot fi scrise ca tensor într-o matrice pătrată 3×3:
εγ
γεγ
γγε
=ε
zyzxz
zyyxy
zxyxx
T
21
21
21
21
21
21
(13.104)
Se poate demonstra că între teoria tensiunilor şi cea a deformaţiilor, analogiaeste deplină. Toate formulele din teoria deformaţiilor se pot scrie prin analogie cuformulele corespunzătoare din teoria tensiunilor.
Există astfel trei direcţii principale 1, 2, 3, pentru care ε1 > ε2 > ε3 au valoriextreme iar lunecările specifice sunt nule. Direcţiile principale ale tensorului Tε
coincid cu direcţiile principale ale tensorului Tσ pentru corpurile izotrope şi liniar -elastice. Mărimile lungirilor specifice principale sunt date de ecuaţia de gradul III în εscrisă sub forma determinantului:
0
21
21
21
21
21
21
=
ε−εγ
γε−εγ
γγε−ε
zyzxz
zyyxy
zxyxx
(13.105)
analoagă ecuaţiei (13.54); în acelaşi fel se găsesc şi cei trei invarianţi I’1, I’2, I’3corespunzători tensorului deformaţiilor specifice.

164
De asemenea, se poae demonstra că lunecările specifice au valori extreme înplanele bisectoare ale diedrelor având ca normale direcţiile principale două câte două.Lunecările specifice maxime sunt date de :
γ12 = ε1 - ε2 ; γ23 = ε2 - ε3; γ13 =γmax = ε1 - ε3 (13.106)
Se poate defini prin analogie deformaţia octaedrică normală εoct şi deformaţiaoctaedrică tangenţială γoct .
b. Relaţia dintre constantele elastice ale materialului E, G şi ννννDin relaţiile (13.40) se obţine:
( )[ ]
( )[ ]
( )[ ]2133
1322
3211
1
1
1
σ+σν−σ=ε
σ+σν−σ=ε
σ+σν−σ=ε
E
E
E
(13.107)
şi ţinând seama de relaţiile (13.106) se obţine:
( )GGE 2
1 2112122121
σ−σ=τ=γ=σ−σν+=ε−ε (13.108)
de unde rezultă: ( )ν+=
12EG (13.109)
numită relaţie de izotropie, care arată faptul că între E, G şi ν există numai douăconstante elastice independente, cea de-a treia fiind funcţie de cele două.
13.1.9. Deformaţia volumică specifică (ecuaţia lui Poisson).Se consideră un paralelipiped elementar din interiorul unui corp elastic având
laturile dx, dy, dz , care în urma deformaţiei are dimensiunile dx1 , dy1 , dz1 ( fig.13.14). Astfel, volumul iniţial fiind:
dV = dx dy dz (13.110)iar după deformare dV1 = dx1 dy1 dz1 adică:
( )( )( )
( )( )( ) dzdydxdzdw
dydv
dxdudxdydzdwdzdvdydudxdV
zyx ε+ε+ε+=
=
+
+
+=+++=
111
1111 (13.111)
se defineşte deformaţia specifică volumică în jurul unui punct, prin raportul:( ) ( )( )( ) 11111 −ε+ε+ε+=−=∆=ε zyxv dV
dVdVdVdV (13.112)

165
unde neglijând termenii care conţin produse ale deformaţiilor specifice, rezultă:εv = εx + εy + εz , (13.113)
Notând deformaţia medie cu: εm = 13
( εx + εy + εz ) (13.114)
avem relaţia: εv = 3 εm . (13.115)Adunând membru cu membru primele trei relaţii (13.40) se obţine:
εx + εy + εz = E
ν−21 (σx + σy + σz) (13.116)
Notând tensiunea medie cu: σm = p = 3
zyx σσσ ++(13.117)
relaţia (13.116) devine: σm =ν−21
E εm (13.118)
Deci tensiunea medie este proporţională cu deformaţia medie. Ţinând seama derelaţiile (13.115), ecuaţia (13.118) se mai poate scrie şi sub forma:
σm = )(
Eν−213
εv. (13.119)
Expresia (13.119), precum şi (13.118) poartă denumirea de legea variaţieielastice a volumului. Cercetările experimentale au confirmat această lege chiar şipentru valori ale tensiunii medii care depăşesc limita de elasticitate a materialului σe.Relaţia (13.119) se mai poate scrie şi :
εv = E
)( ν−213 σm (13.120)
Din ecuaţia lui Poisson rezultă că deformaţia volumică este nulă atunci când esteîndeplinită condiţia:
σx + σy + σz = 0 (13.121)
Se notează modulul de elasticitate cubică: K = )(
Eν−213
(13.122)
ecuaţia lui Poisson se scrie: εv = 1K
σm (13.123)
Revenim din nou la ecuaţiile (13.41) şi scădem din membrii din stânga şi dindreapta relaţia (13.117), obţinem:
( ) ( )
( ) ( )
( ) ( )mzmzmz
mymymy
mxmxmmxmx
GE...
GE...
GEEE
ε−ε=ε−εν+
==σ−σ
ε−ε=ε−εν+
==σ−σ
ε−ε=ε−εν+
=εν−
−
ε
ν−ν+ε
ν+=σ−σ
21
21
212121
31
(13.124)

166
Dacă se adaugă relaţiile:
xyxy G γ=τ212 , yzyz G γ=τ
212 , zxzx G γ=τ
212 . (13.125)
Relaţiile (13.124) şi (13.125) se folosesc în teoria deformaţiilor plastice şireprezintă legea variaţiei formei exprimând faptul că componentele tensiunilor şi aledeformaţiilor, corespunzătoare variaţiei formei sunt proporţionale unele cu altel. Elese pot scrie matricial astfel:
ε−εγγ
γε−εγ
γγε−ε
=
σ−στττσ−στττσ−σ
mzzyzx
yzmyyx
xzxymx
mzzyzx
yzmyyx
xzxymx
G
21
21
21
21
21
21
2 (13.126)
În concluzie se obţine relaţia de descompunere a tensorilor tensiune şideformaţie ca o sumă a doi tensori: unul sferic modificator al volumului (TSσ şi TSε )şi unul deviator (TDσ şi TDε) modificator al formei:
σ−στττσ−στττσ−σ
+
σσ
σ=+= σσσ
mzzyzx
yzmyyx
xzxymx
m
m
m
DS TTT00
0000
(13.127)
ε−εγγ
γε−εγ
γγε−ε
+
εε
ε=+= εεε
mzzyzx
yzmyyx
xzxymx
m
m
m
DS TTT
21
21
21
21
21
21
000000
(13.128)
13.1.10 Expresia energiei potenţiale de deformaţie totale, demodificare a formei şi modificare a volumului.
Sub acţiunea forţelor exterioare, corpul elastic suferă o deformaţie în urmacăreia forţele efectuează un anumit lucru mecanic. Considerăm că acest lucrumecanic se transformă integral în energie potenţială de deformaţie care, în urmaînlăturării forţelor exterioare, este consumat pentru restabilirea formei iniţialenedeformate.
Întrucât energia potenţială de deformaţie specifică se referă la un volumelementar egal cu dV, energia potenţială de deformaţie totală a unui corp se obţine cuajutorul relaţiei: ∫=
)V(
dVUU 1 , (13.129)

167
Se consideră un cub cu laturile egale dx=dy=dz=1. Pe feţele acestui cub sedezvoltă tensiunile normale şi tangenţiale σx , σy, σz , τxy , τyz , τzx şi el suferădeformaţiile specifice εx ,εy, εz, γxy, γyz, γzx . Starea generală de deformaţie poate ficonsiderată ca fiind rezultatul însumării a trei stări liniare de întindere simplă (σx -εx ,σy -εy, σz -εz) şi a trei stări liniare de forfecare pură (τxy - γxy, τyz - γyz, τzx - γzx ). Sepoate exprima energia specifică de deformaţie totală pentru starea generală dedeformaţie:
[ ]zxzxyzyzxyxyzzyyxxU γτ+γτ+γτ+εσ+εσ+εσ=21
1 . (13.130)
Folosind legea generalizată a lui Hooke (13.40) şi înlocuind în expresia(13.130) se obţine:
( )[ ] ( )2222221 2
1221
zxyzxyxzzyyxzyx GEU τ+τ+τ+σσ+σσ+σσν−σ+σ+σ= (13.131)
În funcţie de tensiunile principale (13.131) se scrie:
( )[ ]13322123
22
211 2
21 σσ+σσ+σσν−σ+σ+σ=E
U . (13.132)
Prin aplicarea forţelor exterioare, un corp îşi schimbă forma şi dimensiunileiniţiale. Corespunzător, energia de deformaţie înmagazinată în corp se compune dindouă cantităţi: o energie de variaţie a volumului U1
V, şi o energie de variaţie a formeiU1
D .Să presupunem un paralelipiped cu laturile dx, dy, dz, care după deformare îşi
modifică proporţional dimensiunile:
dx1=(1+εx)dx, dy1 =(1+εy)dy, dz1=(1+ εz)dz (forma nu se modifică) deci existărelaţia de asemănare:
dzdz
dydy
dxdx 111 == (13.133)
care conduce la condiţia: εx = εy = εz = ε0 (13.134)Introducând aceste valori în relaţiile (5.18), rezultă că starea de tensiune care
produce deformaţii egale după cele trei direcţii are componentele egale:σx = σy = σz = σ0 (13.135)
sau după cele trei direcţii principale cu componentele egale:σ1 = σ2 = σ3 = σm (13.136)
Energia potenţială specifică de modificare a volumului se calculează înlocuindrelaţia (13.136) în (13.132):
( )23211 6
21213 σ+σ+σν−=σν−=EE
)(U mV (13.137)

168
Energia potenţială specifică de modificare a formei se calculează scăzând dinenergia potenţială specifică totală energia potenţială specifică de modificare avolumului:
( )[ ]13322123
22
21111 3
1 σσ+σσ+σσ−σ+σ+σν+=−=E
UUU VD (13.138)
care se poate scrie şi sub forma:
( ) ( ) ( )[ ]
[ ]231
223
2121
213
232
2211
312
61
τ+τ+τν+=
σ−σ+σ−σ+σ−σν+=
E)(U
:sauE
U
D
D
(13.139)
Divizarea energiei potenţiale de deformaţie specifice în cele două componenteeste legată de divizarea tensorului tensiunii în două componente (13.127):
τ+ττ+τ
τ+τ=
σ−σ+σ−σ
σ−σ+σ−σ
σ−σ+σ−σ
=
σ−σσ−σ
σ−σ+
σσ
σ=+=
σ
σσσ
3231
2321
1312
2313
3212
3121
1
000000
2200
022
0
0022
32
000000
000000
D
mz
my
m
m
m
m
DS
T
TTT
(13.140)
Tensorul sferic produce numai modificarea volumului, iar tensorul deviatorproduce modificarea formei.

169
13.2. STAREA PLANĂ DE TENSIUNI ŞI DEFORMAŢII ÎNJURUL UNUI PUNCT
13.2.1. Tensiuni şi direcţii principale pentru starea plană detensiuni . Cercul lui Mohra. Tensiuni şi direcţii principaleUn corp este supus la o stare plană de tensiune dacă are aceaşi distribuţie a
tensiunilor în toate planele paralele cu un plan dat. Starea plană de tensiune seîntâlneşte la plăci plane de grosime neglijabilă acţionate de un sistem de forţecoplanare, la corpuri de secţiune constantă, la care intensitatea direcţia şi sensulforţelor aplicate rămân constante în lungul generatoarelor respective (cum ar fi deexemplu tuburile cu pereţi groşi). Corpurile respective se pot deforma liber, în lunguldirecţiei normale pe planele considerate. Dacă deformarea în lungul direcţiei normalepe planele considerate este împiedicată, atunci se obţine o stare plană de deformaţii şio stare spaţială de tensiuni deoarece împiedicarea deformării produce tensiuni şi pe atreia direcţie.
Se consideră solicitarea unei plăci plane de un sistem de forţe cuprinse înplanul Oxz; tensorul tensiunii va fi caracterizat doar prin compomentele ce acţioneazăîn acest plan:
σττσ
=σzzx
xzxT (13.141)
în schimb, tensorul deformaţiei va aveatoate componentele diferite de zero:
εγγ
γεγ
γγε
=ε
zzyzx
yzyyx
xzxyx
T
21
21
21
21
21
21
(13.142)
În acest caz particular, există doardouă tensiuni principale, respectiv douădirecţii principale.
Se consideră placa subţire, de grosime constantă h acţionată de forţe coplanarecu suprafaţa mediană a plăcii. Dacă din această piesă se separă un element elementarde volum cu baza un triunghi dreptunghic şi înălţimea egală cu grosimea plăcii ,ipotenuza BC făcând un unghi oarecare α cu Oz (sau normala la faţa BC face unghiulα cu Ox) ca în fig. 13.15.
x
n
z Fig. 13.15
α
σx
τzx
σzτxz
σ
τ
α dA
dA sinα
dA cosα
B
C
O

170
Pe cele trei feţe laterale ale elementului acţionează tensiunile normale şitangenţiale: σx , τzx , σz , τxz respectiv σ , τ. Se pune următoarea problemă: dacăse cunosc tensiunile de pe feţele perpendiculare OB şi OC (σx , τzx , σz , τxz) şi unghiulα, care este expresia tensiunilor (σ , τ) pe faţa înclinată BC ?
Suprafaţa laterală ale elementului prismatic pe care acţionează tensiunile (σx ,τzx ) este dAx= dA cosα, cea pe care acţionează (σz , τxz) este dAz= A sin α şi cea pecare acţionează (σ , τ ) este dA.
Se scriu cele două ecuaţii de echilibru ale forţelor pentru elementul OBC, înproiecţii pe direcţia lui σ, respectiv pe direcţia lui τ:
;cossindAsincosdAsinsindAcoscosdAdAF
xzzx
zx
00
=α⋅ατ−α⋅ατ−−α⋅ασ−α⋅ασ−⋅σ⇒=∑ σ (13.143)
.sinsindAcoscosdAcossindAsincosdAdAF
xzzx
zx
00
=α⋅ατ−α⋅ατ++α⋅ασ+α⋅ασ−⋅τ⇒=∑ τ (13.144)
Simplificând prin dA şi ţinând seama de principiul dualităţii tensiunilortangenţiale ,xzzx τ=τ se obţine:
;cossinsincos zxzx α⋅ατ+ασ+ασ=σ 222 (13.145)( ) ( ).sincoscossin zxzx α−ατ−α⋅ασ−σ=τ 22 (13.146)
Aceste relaţii se pot exprima şi în funcţie de argumentul 2α astfel:
;sincos zxzxzx ατ+ασ−σ+σ+σ=σ 22
22(13.147)
.cossin zxzx ατ−ασ−σ=τ 22
2(13.148)
Pentru a determina valorile extreme ale funcţiilor σ(α) şi τ(α) în funcţie deunghiul α, se anulează derivata lor în raport cu 2α :
( ) .02cos2sin22
=−=+−−= τατασσασ
zxzx
dd (13.149)
( ) ;sincosd
dzx
zx 02222
=ατ+ασ−σ=ατ (13.150)
Deoarece expresia derivatei lui σ în raport cu 2α este identică cu expresia lui -τ(α), rezultă că tensiunile normale vor avea valori extreme în acele secţiuni în caretensiunile tangenţiale sunt nule (reciproca acestei proprietăţi nu este adevărată), ceeace confirmă faptul că în planele de acţiune ale tensiunilor principale tensiuniletangenţiale sunt nule. Valorile extreme ale tensiunilor normale σ1 şi σ2 se numesctensiuni principale iar normalele la planele pe care acţionează acestea se numescdirecţii principale.
Soluţia ecuaţiei (13.149) este soluţia ecuaţiei trigonometrice:

171
;tgzx
zx
σ−στ=α 22 (13.151)
de unde rezultă: π+σ−σ
τ=α karctgzx
zx22 . (13.152)
Dintre aceste valori, sunt distincte doar primele două :
22
21
121
π+α=ασ−σ
τ=α siarctgzx
zx (13.153)
Deci, înclinările direcţiilor principale sunt date de α1 şi α2 care diferă între elecu 900, adică cele două sunt perpendiculare între ele.
Înlocuind în relaţia (13.147) se obţin tensiunile principale:
( ) 2231 4
21
2 zxzxzx
, τ+σ−σ±σ+σ=σ (13.154)
Soluţia ecuaţiei (13.150) este soluţia ecuaţiei trigonometrice:
;*tgzx
xz
τσ−σ=α
22 (13.155)
de unde rezultă: π+τσ−σ=α karctg*
zx
xz
22 . (13.156)
Dintre aceste valori, sunt distincte doar primele două :
2221
121
π+α=ατσ−σ=α **siarctg*
zx
xz (13.157)
Şi în acest caz înclinările direcţiilor planelor date de α*1 şi α*2 diferă între elecu 900, adică cele două plane sunt perpendiculare între ele.
Înlocuind în relaţia (13.147) se obţin tensiunile extreme:
( ) .zxzx,22
3113 421 τ+σ−σ±=τ (13.158)
Se obsearvă din produsul 122 −=α⋅α *tgtg că cele două drepte având pantele
α= 21 tgm şi *tgm α= 22 sunt perpendiculare, adică: 2
22 π±α=α* .
Rezultă că 4π±α=α* adică secţiunile pe care acţionează valorile extreme ale
tensiunilor tangenţiale τ , sunt bisectoarele unghiurilor diedre definite de secţiunile pecare acţionează tensiunile principale.
Se observă că suma tensiunilor principale nu depinde de unghiul α:;ttanconszx =σ+σ=σ+σ 31 (13.159)
sau suma tensiunilor normale, de pe oricare pereche de plane perpendiculare între eleeste o constantă, denumită invariantul stării plane de tensiune. Diferenţa tensiunilorprincipale dă:

172
( ) 1322
13 24 τ=τ+σ−σ=σ−σ zxzx ; (13.160)
de unde:2
3113
σ−σ=τ (13.161)
Ultima relaţie arată că valorile extreme ale tensiunilor tangenţiale se mai potcalcula ca semidiferenţa tensiunilor principale.
b. Cercul tensiunilor (cercul lui Mohr)Relaţiile de calcul (13.147) şi (13.148) se pot pune sub forma:
;sincos zxzxzx ατ+ασ−σ=σ+σ−σ 22
22(13.162)
;cossin zxzx ατ−ασ−σ=τ 22
2(13.163)
care, ridicate la pătrat şi însumate membru cu membru dau relaţia:
222
22 zxzxzx τ+
σ−σ=τ+
σ+σ−σ (13.164)
Această relaţie reprezintă ecuaţia cercului tensiunilor pentru starea plană detensiune în coordonate σ - τ:
cu centrul
σ+σ 0
2,C zx şi raza ( ) 22 4
21
zxzxr τ+σ−σ= .
Dacă se consideră că sistemul de axe Oxz coincide cu direcţiile principale:σx≡σ1 , σz≡σ3 , τxz=0 atunci relaţia (13.164) se scrie:
2
3122
31
22
σ−σ=τ+
σ+σ−σ (13.165)
Se obţine astfel ecuaţia cerculuilui Mohr pentru starea plană de tensiuneîn coordonate σ - τ , reprezentat înfigura 13.16.Coordonatele punctului M sunttensiunile de pe faţa BC a elementuluiiar coordonatele punctului M’ exprimătensiunile de pe o faţă perpendiculară pefaţa BC
τ
Fig. 13.16
σO
C[(σ1+σ3)/2]
σ1
σ3
r =(σ1-σ3)/22α
M
M’

173
13.2.2. Cazuri particulare ale stării plane de tensiunia. Întinderea sau compresiunea după două direcţii perpendiculareSe consideră un element de placă dreptunghiular de grosime h solicitat numai
la întindere după două direcţii perpendiculare, cu tensiunile normale: σx > 0 şi σz >0 şi tensiunile tangenţiale pe cele patru feţe laterale nule 0=τ=τ xzzx (fig. 13.17).
Deci tensiunile normale sunt principale., zx 31 σ=σσ=σ
Tensiunile de pe o secţiune înclinată cuunghiul α sunt:
;coszxzx ασ−σ+σ+σ=σ 222
(13.166)
.sinzx ασ−σ=τ 22
(13.167)
În cazul particular când ,zx 0σ=σ=σ seobţine: 00 =τσ=σ ; (13.168)
Deci dacă elementul de volum este solicitat la întindere (sau compresiune)egală după două direcţii perpendiculare, atunci în orice punct al său apare o stare desolicitare de întindere (sau compresiune), uniformă după toate direcţiile ce trec prinacel punct.
b. Întinderea şi compresiunea simultanădupă două direcţii perpendiculareDacă elementul de placă de grosime h estesolicitat simultan la întindere şi la compresiunedupă două direcţii perpendiculare (fig. 13.18)atunci tensiunile tangenţiale pe cele patru feţelaterale sunt nule, 0=τ=τ xzzx iar tensiunilenormale sunt chiar tensiunile principale:
00 31 <σ=σ>σ=σ zx ;
Formulele de clcul ale tensiunilor, de pe osecţiune înclinată BC se scriu:
;coszxzx ασ−σ+σ+σ=σ 222
(13.169)
.sinzx ασ−σ=τ 22
(13.170)
În situaţia 0σ=σ=σ zx , aceste formule iau o formă şi mai simplă:
x
n
zFig. 13.17
α
σx
σz
σ
τB
C
O
M
D
σz
σx
x
n
zFig. 13.18
α
σx
σz
σ
τB
C
O
M
D
σz
σx
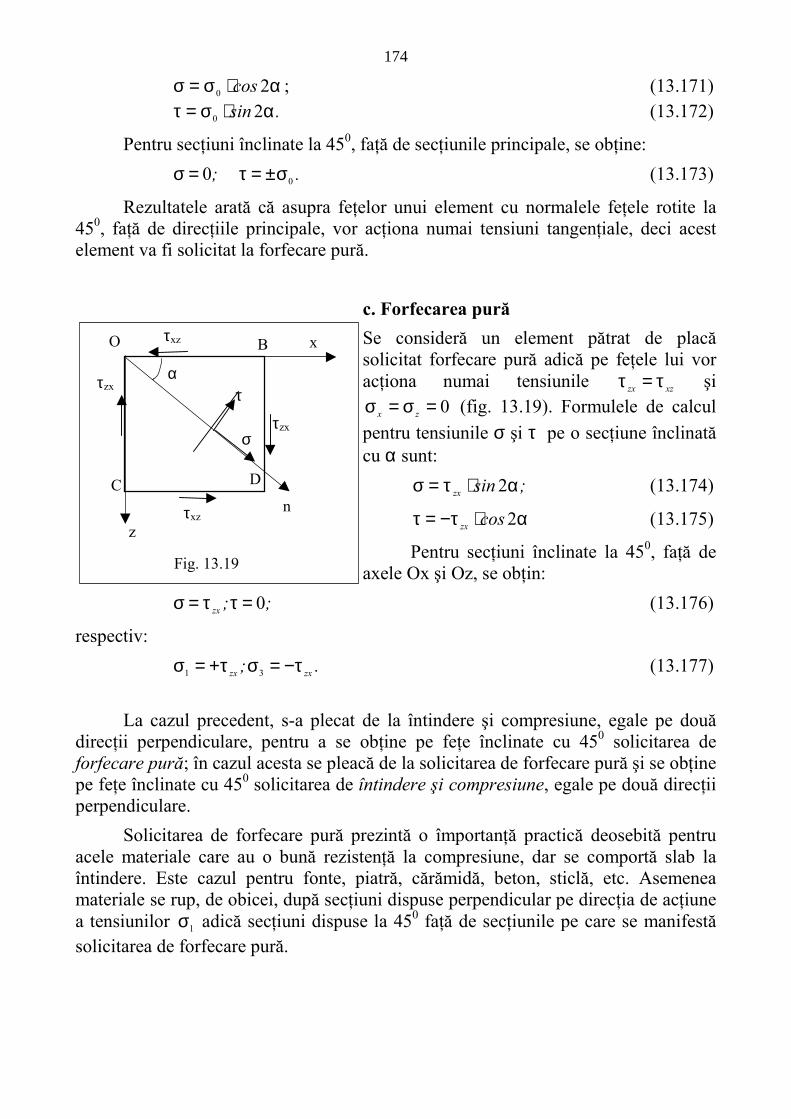
174
α⋅σ=σ 20 cos ; (13.171).sin α⋅σ=τ 20 (13.172)
Pentru secţiuni înclinate la 450, faţă de secţiunile principale, se obţine:.; 00 σ±=τ=σ (13.173)
Rezultatele arată că asupra feţelor unui element cu normalele feţele rotite la450, faţă de direcţiile principale, vor acţiona numai tensiuni tangenţiale, deci acestelement va fi solicitat la forfecare pură.
c. Forfecarea purăSe consideră un element pătrat de placăsolicitat forfecare pură adică pe feţele lui voracţiona numai tensiunile xzzx τ=τ şi
0=σ=σ zx (fig. 13.19). Formulele de calculpentru tensiunile σ şi τ pe o secţiune înclinatăcu α sunt:
;sinzx α⋅τ=σ 2 (13.174)
α⋅τ−=τ 2coszx (13.175)
Pentru secţiuni înclinate la 450, faţă deaxele Ox şi Oz, se obţin:
;;zx 0=ττ=σ (13.176)
respectiv:.; zxzx τ−=στ+=σ 31 (13.177)
La cazul precedent, s-a plecat de la întindere şi compresiune, egale pe douădirecţii perpendiculare, pentru a se obţine pe feţe înclinate cu 450 solicitarea deforfecare pură; în cazul acesta se pleacă de la solicitarea de forfecare pură şi se obţinepe feţe înclinate cu 450 solicitarea de întindere şi compresiune, egale pe două direcţiiperpendiculare.
Solicitarea de forfecare pură prezintă o împortanţă practică deosebită pentruacele materiale care au o bună rezistenţă la compresiune, dar se comportă slab laîntindere. Este cazul pentru fonte, piatră, cărămidă, beton, sticlă, etc. Asemeneamateriale se rup, de obicei, după secţiuni dispuse perpendicular pe direcţia de acţiunea tensiunilor 1σ adică secţiuni dispuse la 450 faţă de secţiunile pe care se manifestăsolicitarea de forfecare pură.
x
nz
Fig. 13.19
ατzx
τxz
σ
τ
B
C
O
D
τxz
τzx

175
d. Încovoierea simplă a unei bare cu secţiunea simetricăSe consideră o bară dreaptă de secţiune constantă solicitată de un sistem de
forţe coplanare în planul de simetrie axială Oxz. Starea de tensiuni în planele paralelcu Oxz este aceeaşi, deci putem afirma că în acest caz avem o stare plană detensiuni(fig. 13.20). Tensiunile într-un punct M al secţiunii sunt σx , σz= 0 şi τzx şi auurmătoarele legi de distribuţie:
zI
M
y
iyx ⋅=σ ;
y
yzxzzx bI
*ST=τ=τ (13.178)
Direcţiile principale sunt date de: ;tgx
zx
στ=α 22 (13.179)
Deci direcţiilor principale date de α1 şi α2 diferă în funcţie de valorile σx , şiτzx adică de poziţia punctului M pe suprafaţa secţiunii (fig. 13.20). Înlocuind în relaţia(13.154) se obţin tensiunile principale:
2231 4
21
2 zxxx
, τ+σ±σ=σ (13.180)
Din relaţia 13.180 se observă că σ1≥ 0 şi σ3 ≤ 0 iar valorile diferă în funcţie depoziţia punctului pe suprafaţa secţiunii. Astfel în cazul secţiunii dreptunghiulareavem:
! pentru punctul C : σx=0, τyx= bhTz
max 23=τ ⇒ (fig. 13.20)
4
34
22 21
π=απ=α⇒∞=στ=α ,tg
x
zx ; maxzxxx
, τ±=τ+σ±σ=σ 2231 4
21
2.
! pentru punctul A : σx=σmax=+ 2
6bhM iy , τyx=0 ⇒ (fig. 13.20)
2
0022 21
π=α=α⇒=στ=α ,tg
x
zx ; 2231
xx,
σ±σ=σ ; σ1=σx , σ3=0.
x
zFig. 13.20
τzx
σx
τmax
C
σ1 σ1
σ3σ3
σ3
σ3
σ1
σ1
C
σmin
σmax
B
A

176
! pentru punctul B : σx=σmin= 2
6bhM iy− , τyx=0 ⇒ (fig. 13.20)
02
022 21 =απ=α⇒=στ=α ,tg
x
zx ; 2231
xx,
σ±σ=σ ; σ1=0 , σ3= − σx .
Direcţiile principale se rotesc din punctul A în punctul B al secţiunii cu 900 însens trigonometric (cînd eforturile secţionale Tz şi Miy sunt pozitive). Înfăşurătoareledirecţiilor principale corespunzătoare lui σ1 şi σ3 sunt două curbe perpendiculare întreele numite linii izostatice de întindere resectiv de comprersiune (fig. 3.21), careprezintă o importanţă deosebită la materialele care se comportă diferit la întindere-compresiune (de exemplu în cazul betonului armat se caută ca armăturile din oţel săurmeze traseul isostaticelor de întindere).
x
z Fig. 13.20
τzx
σx
C
σ1 σ1
σ3σ3
σ3
σ3
σ1
σ1
B
A

177
CAPITOLUL XIVTEORII DE REZISTENŢĂ
14.1. GeneraliţiTeoria stărilor limită sau teoriile de rezistenţă caută să dea răspuns la
întrebarea: care sunt condiţiile pentru care se atinge starea limită de rezistenţă într-uncorp elastic ? Este cunoscut faptul că încărcările exterioare produc în interiorul unuicorp elastic stări de tensiuni şi deformaţii având distribuţii complexe ale tensiunilor şideformaţiilor. Aceste stări complexe de solicitare produc anumite stări limită care secompară cu starea limită de rezistenţă corespunzătoare celei mai simple solicitări, ceade întindere.
Prin stare limită de rezistenţă pentru solicitarea de întindere se înţelege stareade solicitare corespunzătoare fie atingerii unei caracteristici naturale a materialului(cum ar fi limita de proporţionalitate σp, de elasticitate σe, de curgere σc, saurezistenţa de rupere σr), fie a unei caracteristici convenţionale (cum ar fi rezistenţaadmisibilă σa).
În general pentru calculul de verificare, tensiunea maximă produsă în piesătrebuie să fie inferioară rezistenţei admisibile a materialului:
σmax ≤ σa (14.1)Ipoteza că un anumit factor ce caracterizează starea de tensiuni şi deformaţii
este preponderent în atingerea stării limită şi că valoarea limită a acestuia trebuie săfie egală cu cea corespunzătoare de la întinderea simplă, constituie o teorie derezistenţă sau o ipoteză de rupere. Pe baza factorului preponderent, se stabileşte orelaţie între tensiunile principale σ1, σ2, σ3 din piesă şi tensiunea σk corespunzătoarestării limită de la întinderea simplă.
Coeficientul de siguranţă corespunzător stării reale de tensiune (fig.6.1.a) sedetermină cu relaţia:
echk /C σσ= (14.2)
care este analogă relaţiei pentru întinderea simplă: maxk /C σσ= (14.3)
Întrucât tensiunea echivalentă corespunzătoare stării limită - ca funcţie detensiunile principale - se scrie σech = f (σ1 , σ2 , σ3) înlocuind în (14.2) rezultă căstarea limită se poate exprima printr-o funcţie:
F (σ1 , σ2 , σ3 , σk ) = 0 (14.4)
care reprezintă în sistemul de axe (σ1 , σ2 , σ3) o suprafaţă închisă.

178
O stare oarecare de tensiune se reprezintă în acest sistem de coordonate printr-un punct P(σ1 , σ2 , σ3). Dacă punctul P este în interiorul suprafeţei dată de relaţia(14.4.) atunci starea de tensiune corespunzătoare este inferioară stării limită, iar dacăpunctul P se află pe suprafaţă, atunci starea de tensiune este la limită. În afarasuprafeţei, spunem ccă avem o stare periculoasă de tensiune.
Teoriile de rezistenţă diferă între ele prin factorii ales ca preponderent înatingerea stării limită şi poartă denumirea acestor factori. Astfel, avem:1. (Tσ ) teoria tensiunii normale maxime ( G. Galilei);2. (Tε ) teoria deformaţiilor maxime (E. Moriotte);3. (Tτ ) teoria tensiuni tangenţiale maxime (C. Coulomb);4. (TE ) teoria energiei potenţiale specifice totale de deformaţie (E. Beltrami);5. (TED ) teoria energiei potenţiale specifice de deviaţie (M.T.Huber, H.Hencky,
R.Mises)Ca o generalizare a teoriilor de mai sus numite clasice, a apărut şi teoria lui
Mohr (TM) , care exprimă sub o formă unitară starea limită dintr-un corp pentru careese ţine seama de tipul de solicitare şi comportarea diferită a materialui la întindere şicompresiune.
Valabilitatea uneia sau alteia dintre teoriile de mai sus pentru o anumită starede solicitare se poate demonstra experimental. Astfel, din experienţele efectuate pecuburi de marmură supuse la compresiune uniformă triaxială, rezistenţa la rupere estepractic nelimitată, întrucât pentru o astfel de solicitare probele nu s-au distrus.
Experienţele efectuate pe cilindri subţiri supuşi la torsiune, în care se realizeazăo stare de forfecare pură (σ1 = - σ2 = τxy), au arătat că starea limită se atinge pentru:
2/kklim σ=τ=τ .
14.2. Teoriile clasice de rezistenţă1. Teoria tensiunii normale maxime (sau a tensiunii principale) (Tσσσσ )Conform aceastei teorii starea limită într-un corp se atinge atunci când
tensiunea normală maximă σ1 într-un punct al său, atinge valoarea σkcorespunzătoare stării limită de la întinderea simplă. Starea generală de tensiune estecaracterizată prin componentele normale principale σ1 , σ2 , σ3.
Condiţia generală de rezistenţă : σmax ≤ σa (14.5)conform acestei teorii se exprimă prin relaţiile:
- σk ≤ σ1 ≤ σk; - σk ≤ σ2 ≤ σk; - σk ≤ σ3 ≤ σk (14.6)
În sistemul de coordonate (σ1, σ2, σ3) relaţiile (14.6) reprezintă interiorul unuicub cu laturile 2σk, iar pentru starea plană de tensiune (σ2 = 0) interiorul unui pătrat(fig.14.1). Dezavantajele acestei teorii sunt următoarele:

179
- suprafaţa limită fiind închisă înseamnă că la compresiune uniformă triaxialădistrugerea are loc pentru σ1 = σ2 = σ3 = −σk, (şi nu concordă cu realitatea);
- teoria aceasta nu ţine seama de valorile diferite ale rezistenţei la întindere şicompresiune monoaxială. O îmbunătăţire parţială se aduce teoriei prin luarea înconsiderare a limitei de rezistenţă la compresiune kσ′ = α σk (α > 1);
- starea limită în cazul forfecării pure (σ1 = − σ3 = τxz, σ2 = 0), se reprezintăconform acestei teorii prin 2 puncte E şi F de pe a doua bisectoare, corespunzândlui: σ1= −σ3 = τlim = σk ; experienţele au arătat însă, că starea limită are loc pentru
2/klim σ±=τ care corespunde punctelor L şi L’(fig.14.1).
Condiţia de rezistenţă conform teorieiTσ se scire sub forma:
aech ,,max σ≤σσσ=σ 321 (14.7)
Pentru starea plană (14.7) devine:
aech ,max σ≤σσ=σ 31 (14.8)
unde tensiunile principale σ1 ,σ3 secalculează cu formulele (13.154).
2. Teoria deformaţiei specifice maxime (deformaţiei principale) (Tεεεε )Conform aceastei teorii, starea limită într-un punct oarecare al corpului se
atinge atunci când lungirea specifică maximă atinge valoarea deformaţiei principaleεk corespunzătoare stării limită de la întinderea simplă. Condiţia de rezistenţă pentruacest criteriu este :
Ea
amax
σ=ε≤ε , (14.9)
unde εa este deformaţia specifică corespunzătoare tensiunii admisibile σa.
S-a notat cu ε1 , ε2 , ε3 deformaţiile principale corespunzătoare tensiunilorprincipale σ1 , σ2 , σ3 şi cu εk deformaţia limită corespunzătoare stării limită de laîntinderea simplă, atunci condiţia (14.9) se exprimă prin relaţiile:
- εk ≤ ε1 ≤ εk; - εk ≤ ε2 ≤ εk; - εk ≤ ε3 ≤ εk. (14.10)Ţinând seama de relaţia:
Ek
k
σ=ε (14.11)
şi de relaţiile (13.107) care reprezintă legea lui Hooke generalizată, înlocuind în(14.10) se obţin următoarele relaţiile în tensiuni:
Fig. 14.1
O
A
σ2B
CD
D’
σ1
σ3
A’ B’
C’
σk-σk
C1
D1
L’
L
-σk
σk
E
F

180
- σk ≤ σ1 - ν ( σ2 + σ3 ) ≤ σk,
- σk ≤ σ2 - ν ( σ3 + σ1 ) ≤ σk, (14.12)
- σk ≤ σ3 - ν ( σ1 + σ2 ) ≤ σk.
În cazul stării plane de tensiune (σ2 = 0) relaţiile (14.12) devin:
- σk ≤ σ1 - ν σ3 ≤ σk,
- σk ≤ σ3 - ν σ1 ≤ σk (14.13)
care în sistemul de coordonate (σ1, σ3)reprezintă interiorul unui paralelogramcare este reprezentat în fig. 14.2.
Pentru materiale fragile rezultateleobţinute cu Tε sunt mai bune decât celeobţinute prin teoria Tσ.
Condiţia de rezistenţă după teoriaTε , pentru starea generală de solicitarese scrie sub forma:
( ) ( ) ( ) aech ;;max σ≤σ+σν−σσ+σν−σσ+σν−σ=σ 213132321 (14.14)
Pentru starea plană de tensiune (σ2 = 0) relaţia (14.14) se scrie: aech ;max σ≤νσ−σσν−σ=σ 1331 (14.15)
unde valorile tensiunilor principale σ1 > σ3 se calculează cu formulele (13.154).Înlocuind aceste valori în relaţia (14.15) se obţine:
( ) ( ) axzzxzx
ech σ≤τ+
σ−σν++σ+σν−=σ 2
2
21
21 (14.16)
Luând coeficientul lui Piosson ν=0,3 se obţine:
( ) ( ) axzzxzxech ,, σ≤τ+σ−σ+σ+σ=σ 22 4650350 (14.17)
Iar pentru coeficientul lui Piosson ν=0,25 se obţine formula lui Saint - Venant:
( ) axyyx
yx σ≤τ+
σ−σ+σ+σ 2
2
245
83 (14.18)
Fig. 14.2
O σ1
σ3
σk
σk
-σk
-σk
σ1= -σ3=σk/(1+ν)
σ1=σ3=-σk/(1-ν)
-σ1= σ3=σk/(1+ν)

181
3. Teoria tensiunii tangenţiale maxime (Tττττ )Conform aceastei teorii starea limită într-un corp se atinge atunci când într-un
punct din interiorul lui se produc lunecări după planele pe care acţionează tensiuniletangenţiale maxime, sau atunci când tensiunea tangenţială maximă atinge valoarea τkcorespunzătoare stării limită de la întinderea simplă.
Tensiunile tangenţiale maxime conform (13.60) sunt:
22213
3132
2321
12
σ−σ=τσ−σ=τσ−σ=τ ;; (14.19)
Valoarea tensiunii tangenţiale maxime corespunzătoare stării limită de laîntinderea simplă este: 2/kk σ=τ (14.20)
Condiţia de rezistenţă după teoria Tτ , pentru starea generală de solicitare sescrie sub forma:
- τk ≤ τ12 ≤ τk; - τk ≤ τ23 ≤ τk; - τk ≤ τ31 ≤ τk (14.21)sau sub forma:
- σk ≤ σ1 - σ2 ≤ σk; - σk ≤ σ1 - σ3 ≤ σk; - σk ≤ σ2 - σ3 ≤ σk (14.22)
Relaţiile (14.22) reprezintă în sistemul de axe (σ1, σ2, σ3) o prismă hexagonalăregulată având ca axă trisectoarea primului treideru: σ1 = σ2 = σ3 .
Pentru starea plană de tensiune (σ2 = 0) seobţine un hexagon neregulat (fig.14.3) avândecuaţiile corespunzătoare celor 6 laturi:
σ1 - σ3 = ± σk
σ1 = ± σk (14.23)
σ3 = ± σk,Se observă că rezultatele obţinute
folosind aceatsă teorie coincid cu cele de lateoria Tσ în cadranele I şi III; în cadranele II şiIV, ce corespund unor stări de tensiune cu σ1 ⋅σ2 < 0, conturul este reprezentat de drepteleAB’ şi A’B.
Se observă că pentru starea limită de forfecare pură σ1 = -σ2 =±τk corespundpunctele L şi L’ (fig.14.1), ceea ce este în concordanţă cu rezultatele experimentale.
Deoarece teoria Tτ a fost verificată experimental în cazul stării de forfecarepură, ea dă rezultate bune în toate cazurile, cu excepţia stărilor de tensiune apropiatede întinderea uniformă triaxială, în care tensiunile τ sunt foarte mici şi ruperea nu seproduce prin lunecări, ci prin smulgere. Se observă că teoria Tτ nu depinde detensiunea normală pe planul de alunecare şi nici de rezistenţa diferită a materialelor lacompresiune şi întindere.
Fig. 14.3
O σ1
σ3
A
B’
A’-σk σk
σk
-σk
B
L
L’

182
Condiţia de rezistenţă după teoria Tτ pentru o stare generală de solicitare sescrie sub forma:
aech ;;max σ≤σ−σσ−σσ−σ=σ 323121 (14.24)
Pentru o stare plană de tensiuni (σ2 =0) condiţia de rezistenţă (14.24) devine:
aech ;;max σ≤σσ−σσ=σ 3311 (14.25)
Dacă σ1 ⋅ σ3 < 0, atunci termenul σ 1 - σ3 din relaţia (14.25) este cel maimare şi avem:
aech σ≤σ−σ=σ 31 (14.26)
Dacă σ1 ⋅ σ3 > 0, cea mai restictivă este una din condiţiile :
aech σ≤σ=σ 1 ; aech σ≤σ=σ 2 (14.26’)
Întrucât condiţiile de rezistenţă ale teoriei Tτ nu conţin constanta elastică ν, elepot constitui şi criterii de plasticitate pentru calculul în domeniul plastic.
4. Teoria energiei specifice totale de deformaţie (TE)Această teorie admite că într-un corp nu se atinge starea limită atât timp cât
energia potenţială specifică totală U1 corespunzătoare unui element de volum dinjurul oricărui punct al său, este inferioară valorii U1k corespunzătoare stării limită dela întinderea simplă: U1 ≤ U1k .
Pentru o stare generală de tensiuni energia specifică totală de deformaţie seexprimă conform (13.132) cu relaţia:
( )[ ],E
U 13322123
22
211 2
21 σσ+σσ+σσν−σ+σ+σ= (14.27)
iar valoarea corespunzătoare pentru solicitarea de întindere simplă (σ1 = σk, σ2 = σ3= 0) a energiei specifică totală de deformaţie devine:
EU k
k 2
2
1
σ= (14.28)
Egalând expresiile (14.27) şi (14.28) starea limită după teoria TE se exprimăprin relaţia:
( ) kσ=σσ+σσ+σσν−σ+σ+σ 13322123
22
21 2 (14.29)
Condiţia de rezistenţă după teoria TE se scrie deci sub forma:
( ) aech σ≤σσ+σσ+σσν−σ+σ+σ=σ 13322123
22
21 2 (14.30)
În cazul stării plane de tensiune (σ2=0) se obţine în sistemul de coordonate (σ1,σ3 ) ecuaţia unei elipse având semiaxa înclinată cu α=450 ca în figura 14.4:
aech σ≤σσν−σ+σ=σ 3123
21 2 (14.31)

183
5. Teoria energiei specifice de deviaţie TED (sau de variaţie a formei)Teoria energiei specifice de deviaţie (sau de variaţie a formei) se aplică în
cazul solicitărilor cu compresiune preponderentă (adică pentru σ1+σ2+σ3 < 0). Ea sebazează pe rezultatele experimentale obţinute cu un corp elastic comprimat uniformtriaxial, care rezistă foarte bine în comparaţie cu acelaşi corp elastic comprimatmonoaxial. La o compresiune uniformă triaxială se modifică numai volumul faţă decazul compresiunii monoaxiale când se produce şi o modificare a formei. Aceastăteorie admite deci ca factor preponderent energia potenţială specifică de variaţie aformei.
Conform acestei teorii într-un corp se atinge starea limită atunci când energiaspecifică de deviaţie U1
D corespunzătoare unui element de volum din jurul unui punctal său, atinge valoarea U1k corespunzătoare energiei specifice de deviaţie pentrustarea limită de la întinderea simplă. Pentru o stare de tensiune oarecare, energiaspecifică de deviaţie U1
D se scrie conform (13.138):
( )[ ]13322123
22
211 3
1 σσ+σσ+σσ−σ+σ+σν+=E
U D , (14.32)
iar valoarea corespunzătoare pentru solicitarea de întindere simplă (σ1 = σk, σ2 = σ3= 0) a energiei specifică totală de deformaţie devine:
21 31
kDk E
U σν+= . (14.33)
Egalând expresiile date de relaţiile (14.32) şi (14.33), stare limită după teoriaTED se exprimă prin relaţia:
( ) kσ=σσ+σσ+σσ−σ+σ+σ 13322123
22
21 (14.34)
Condiţia de rezistenţă după teoria TED se scrie deci sub forma:
( ) aech σ≤σσ+σσ+σσ−σ+σ+σ=σ 13322123
22
21 (14.35)
Fig. 14.4
O σ1
σ3
σk
σk
-σk
-σk
σ1=σ3=σk / ν−22
σ1=-σ3=σk / ν+ 22
L
L’
σ1=σ3=-σk / ν−22
σ1=-σ3=-σk / ν+ 22
Fig. 14.5
O σ1
σ3
σk
σk
-σk
-σk
σ1=σ3=σk
σ1=-σ3=σk / 3
L
L’
σ1=σ3=-σk
σ1=-σ3=-σk / 3

184
care în sistemul de coordonate σ1 , σ2 , σ3 reprezintă un cilindru având ca axătrisectoarea σ1 =σ2 = σ3. Se observă că pentru σ1 =σ2 = σ3 = σm relaţia (14.34)devine σk=0 adică starea limită nu se atinge oricât de mare ar fi σm ; rezultă cătrisectoarea nu intersectează suprafaţa limită şi deci cilindrul este deschis atât în zonacompresiunilor cât şi a întinderilor triaxiale uniforme. Deci teoria TED este o teorie delunecare ca şi Tτ.
În cazul stării plane de tensiune (intersectând cilindrul cu planul σ2 = 0) seobţine o elipsă (fig.14.5) care trece prin vârfurile hexagonului de la teoria Tτ avândecuaţia:
kσ=σσ−σ+σ 3123
21 (14.36)
În cazul stării de forfecare pură (σ1 =-σ2 =± τ) starea limită este reprezentată depunctele L şi L’ , astfel încât rezultă valoarea limită a tensiunii:
kkk ,/ σ=σ=τ 57703 (14.37)
care este foarte apropiată de cea determinată experimental (τ=0,5 σk).
Prin urmare, teoria TED prezintă aceleaşi avantaje ca teoria Tτ având avantajulcă exprimă condiţia de rezistenţă printr-o singură relaţie şi ia în consideraţie şiinfluenţa tensiunii intermediare σ2, datorită căreia suprafaţa limită de la Tτ (prismă) s-a transformat într-un cilindru.
Observaţii1) Teoria aceasta prezintă aceleaşi dezavantaje ca şi teoria Tτ , adică nu poate fiaplicată la stări de tensiune apropiate starea de întinderea triaxială uniformă.2) La fel ca şi teoria Tτ , teoria TED, neconţinând constante elasice poate fi folosităsub forma relaţiilor (14.34) şi (14.35) ca un criteriu de plasticitate pentru calculul îndomeniul elasto - plastic.
14.3. Teoria lui Mohr (TM)Ca şi teoria Tτ , teoria lui Mohr admite că starea limită se atinge când într-un
punct din interiorul corpului se produc lunecări după planele pe care acţioneazătensiunile tangenţiale maxime, prin lunecare.
Altfel exprimat, primele deformaţii de lunecare apar atunci când tensiuneatangenţială maximă (τ) dintr-un plan atinge o anumită valoare care depinde detensiunea normală (σ) din planul de lunecare. Aceasta dependenţă τ = f(σ) reprezintăîn sistemul de coordonate (τ ,σ) o curbă care este denumită curba intrinsecă derezistenţă sau înfăşurătoarea lui Mohr, simetrică faţă de axa σ .
Pentru o stare spaţială de tensiune cu σ1 > σ2 > σ3, am văzut la paragraful13.1.7.d că tensiunile σ şi τ corespunzătoare unei stări limită pot fi reprezentate însistemul de coordonate (τ, σ) prin cele trei cercuri ale lui Mohr (fig. 14.6).

185
Se observă că valoarea maximă
2
312
σ−σ=τ=τmax (14.38)
este dată de raza cercului mare C2.Pentru a nu depăşi starea limită trebuieca cercul mare a lui Mohr, pentru oricesolicitare posibilă, să nu intersectezecurba intrinsecă (la limită să fietangent la această curbă).
Dacă se consideră o serie decercuri ale lui Mohr de diametre σ1 -σ3, reprezentând diferite stări limităcorespunzătoare diferitelor tipuri desolicitare, curba intrinsecă reprezintăînfăşurătoarea acestor cercuri(fig.14.7).
Teoria lui Mohr, întâmpină dificultăţi din cauza necunoaşterii curbelorintrinseci pentru diferite materiale. De aceea, în calcule se utilizează o schematizarecurbei lui Mohr prin două linii drepte tangente la cercurile limită corespunzătoaresolicitărilor de întindere şi compresiune simplă (fig.14.8).
τ
Fig. 14.6
σO C1 C2 C3
σ1
σ2
σ3
Fig. 14.7
OC2 σC0 C1 C3
τ
C4 C5 σm
Fig. 14.8
σ
τ
σatσac
EF
GD
C2 C1COσ3 σ1

186
Se notează cu σat tensiunea admisibilă la tracţiune şi cu σac tensiuneaadmisibilă la compresiune . Cercurile având centrele C1 şi C2 au respectiv razele
21at
CR σ= , 22
acCR σ= . Din asemănarea triunghiurilor C1CF şi C1C2E rezultă proporţio-
nalitatea laturilor , adică:
221
1
CECF
CCCC = (14.39)
unde:22
3111
σ−σ−σ=−= atCOCOCC
221221acatCOOCCC σ+σ=+= (14.40)
2231 atDFDCCF σ−σ+σ=−=
2222atacEGGCCE σ−σ=−=
Inlocuind relaţia (14.40) în (14.39) şi luând în faţa lui σac semnul minus, (limitala compresiune fiind dată pozitivă), se obţine următoarea relaţie:
atac
at σ=σ⋅σσ−σ 31 (14.41)
Notând ac
atKσσ= , relaţia (14.41) devine relaţia lui Mohr :
σech = σ1 - K σ3 (14.42)Acestă relaţie care exprimă tensiunea echivalentă conform teorirei lui Mohr, în
cazul particular al materialelor care rezistă la fel la întindere şi la compresiune(σat = σac , K=1) devine condiţia de rezistenţă corespunzătoare teoriei tensiuniitangenţiale maxime Tτ:
σech = σ1 - σ3 (14.43)În cazul forfecării pure (σ1 = - σ3 = τ) relaţia (14.42) se scrie:
τ + K τ = σech sauK
echech +
σ=τ1
(14.44)
În cazul stării plane de tensiune (σ1, σ3 ) condiţia de rezistenţă se exprimă:σech = σ 1 - Kσ3 ≤ σa (14.45)
Relaţia (14.45) reprezintă, pentru cazul stării plane de tensiune cu σ 1 ≥ σ 3 ,o generalizare a teoriilor clasice prezentate mai sus.
Astfel:- pentru K = 0, se obţine Tσ şi Tτ (varianta σ1 ⋅ σ2 > 0 ) ;- pentru K = 1, se obţine Tτ (varianta σ1 ⋅ σ2 < 0 ) ;- pentru K = ν = 0,3 se obţine Tε ;
- pentru ac
atKσσ= se obţine TM ;

187
Dezavantaje ale teoriei - neglijarea influenţei tensiunii intermediare care aredrept consecinţă faptul că nu dă o reprezentare corectă a ruperilor din vecinătateaîntinderilor uniforme triaxiale, pentru care se recomandă aplicarea teoriei Tσ .Experienţele au arătat că arătat că niciuna din teoriile de rezistenţă nu s-a impus ca oteorie general valabilă. Totuşi, în majoritatea stărilor de tensiune teoria lui Mohr,cazul ei particular, teoria tensiunii tangenţiale maxime şi teoria energiei dedeformaţie modificatoare de formă (de deviaţie ) dau rezultatele cele mai apropiatede cele obţinute experimental.

188

189
BIBLIOGRAFIE
1. Atanasiu, M.- Metode analitice noi în Rezistenţa materialelor. Ed. U.P.B.
1994
2. Buzdugan, Gh. - Rezistenţa materialelor. Ed.Academiei, Bucureşti 1986
3. Buzdugan, Gh. s.a. - Culegere de probleme din Rezistenţa Materialelor
E.D.P. Bucureşti 1979
4. Bucura I, Constantinescu E, Alexandrescu I, - Rezistenţa Materialelor
Culegere de probleme. Vol. 1. Ed. Tehnică. Bucureşti 1997
5. Creţu, A- Rezistenţa materialelor. Probleme alese. Ed. Univ. Tehnice Cluj
Napoca 1993
6. Drobotă, V. - Rezistenţa materialelor. Ed. Didactică şi Pedagogică,
Bucureşti 1982
7. Deutsch, I.s.a. - Probleme din Rezistenţa materialelor. Ed. Did. şi
Pedagogică Bucureşti 1986
8. Iliescu, N., Jiga, G. , Hadar A.- Teste grilă de Rezistenţa materialelor. Ed.
Printech, Bucureşti 2000
9. Mirolioubov, I, et coll, - Problemes de Rezistance des materiaux, Ed. Mir
Moscou, 1977
10. Petrescu, Gh., Marin, M.- Rezistenţa materialelor. Ed.Certi Craiova 1994
11. Posea, N. s.a. - Rezistenţa materialelor. Probleme. Ed. Ştiinţifică şi
Enciclopedică Bucureşti 1986
12. Radu, Gh., Munteanu M. Gh. –Rezistenţa materialelor şi elemente de Teoria
elasticităţii. Vol. 1, 2. Ed. Macarie Târgovişte, 1994
13. Stepine, P.- Rezistance des materiaux, Ed. Mir Moscou, 1986
14. Tudose I., s.a - Rezistenţa materialelor. Aplicaţii. Ed. Tehnică, Bucureşti
1990