Curs PMEF
135
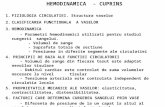
1. SINTEZA ŞI ANALIZA STRUCTURILOR MECANICE. LOCUL ANALIZEI CU ELEMENTE FINITE ÎN REALIZAREA UNUI PRODUS Proiectarea este o activitate de creaŃie, cu implicaŃii multidisciplinare. Pentru rezolvarea unei probleme, proiectantul trebuie să primească informaŃii care să-i permită să formuleze problema dată în termeni numerici. Dacă tema pe care a primit-o conŃine condiŃii calitative, la care nu s-au asociat şi termeni cantitativi, este de aşteptat ca soluŃia să fie nesatisfăcătoare, cel puŃin din unele puncte de vedere. Scopul primordial al proiectării este de a obŃine cel mai bun sistem posibil pentru un ansamblu de cerinŃe impuse. Pentru aceasta se concepe un sistem candidat şi se studiază cum se comportă acesta. În inginerie în general, precum şi în construcŃia unei maşini, a unui utilaj sau a unei instalaŃii, o componentă de bază este structura de rezistenŃă, care reprezintă un ansamblu mecanic cu o funcŃionalitate riguros definită, ca de exemplu: preluarea diverselor sarcini, asigurarea unei anumite poziŃii relative între subansamble, posibilitatea efectuării unor mişcări relative între unele componenete, asigurarea unei stabilităŃi statice şi dinamice, garantarea unei rigididităŃi impuse etc. În limbajul ingineresc obişnuit structura de rezistenŃă se numeşte mai simplu: structură. Calculele de rezistenŃă, de stabilitate, de durabilitate, dinamice etc au în vedere structura de rezistenŃă în ansamblu, componentele acesteia, precum şi alte elemente, componente sau subansamble ale maşinii, utilajului sau instalaŃiei care se proiectează. Aceste calcule constitue o componenetă importantă a proiectării dar ele pot fi duse la bun sfârşit numai după ce alte aspecte, de principiu sau de detaliu, au fost clarificate. Este cazul cerinŃelor beneficiarului, a costurilor impuse, a termenelor acordate, a materialelor disponibile, a tehnologiilor accesibile, a volumului producŃiei, a durabilităŃii cerute produsului, a exigenŃelor ecologice etc. Totdeauna calculele inginereşti trebuie să aibă în vedere satisfacerea optimă a funcŃiilor şi cerinŃelor fundamentale ale proiectării, ceea ce conduce la concluzia că disocierea procesului de calcul de cel de proiectare implică riscul unor consecinŃe nefavorabile, care pot fi grave, greu de anticipat. O prezentare concisă şi sugestivă a acestor corelaŃii multiple se face în schema din figura 1.1. Figura 1.1
-
Upload
marian-igescu -
Category
Documents
-
view
30 -
download
4
description
analiza cu elemente finite fem/fea
Transcript of Curs PMEF

1.
SINTEZA ŞI ANALIZA STRUCTURILOR MECANICE. LOCUL ANALIZEI CU ELEMENTE FINITE
ÎN REALIZAREA UNUI PRODUS
Proiectarea este o activitate de creaŃie, cu implicaŃii multidisciplinare. Pentru rezolvarea unei probleme, proiectantul trebuie să primească informaŃii care să-i permită să formuleze problema dată în termeni numerici. Dacă tema pe care a primit-o conŃine condiŃii calitative, la care nu s-au asociat şi termeni cantitativi, este de aşteptat ca soluŃia să fie nesatisfăcătoare, cel puŃin din unele puncte de vedere. Scopul primordial al proiectării este de a obŃine cel mai bun sistem posibil pentru un ansamblu de cerinŃe impuse. Pentru aceasta se concepe un sistem candidat şi se studiază cum se comportă acesta. În inginerie în general, precum şi în construcŃia unei maşini, a unui utilaj sau a unei instalaŃii, o componentă de bază este structura de rezistenŃă, care reprezintă un ansamblu mecanic cu o funcŃionalitate riguros definită, ca de exemplu: preluarea diverselor sarcini, asigurarea unei anumite poziŃii relative între subansamble, posibilitatea efectuării unor mişcări relative între unele componenete, asigurarea unei stabilităŃi statice şi dinamice, garantarea unei rigididităŃi impuse etc. În limbajul ingineresc obişnuit structura de rezistenŃă se numeşte mai simplu: structură. Calculele de rezistenŃă, de stabilitate, de durabilitate, dinamice etc au în vedere structura de rezistenŃă în ansamblu, componentele acesteia, precum şi alte elemente, componente sau subansamble ale maşinii, utilajului sau instalaŃiei care se proiectează. Aceste calcule constitue o componenetă importantă a proiectării dar ele pot fi duse la bun sfârşit numai după ce alte aspecte, de principiu sau de detaliu, au fost clarificate. Este cazul cerinŃelor beneficiarului, a costurilor impuse, a termenelor acordate, a materialelor disponibile, a tehnologiilor accesibile, a volumului producŃiei, a durabilităŃii cerute produsului, a exigenŃelor ecologice etc. Totdeauna calculele inginereşti trebuie să aibă în vedere satisfacerea optimă a funcŃiilor şi cerinŃelor fundamentale ale proiectării, ceea ce conduce la concluzia că disocierea procesului de calcul de cel de proiectare implică riscul unor consecinŃe nefavorabile, care pot fi grave, greu de anticipat. O prezentare concisă şi sugestivă a acestor corelaŃii multiple se face în schema din figura 1.1.
Figura 1.1

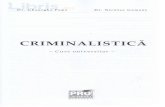
Sinteza şi proiectarea structurii de rezistenŃă trebuie realizate în aşa fel încât aceasta (adică structura) să fie sigură pentru valori clare ale parametrilor funcŃionali riguros definiŃi, în condiŃiile îndeplinirii unor cerinŃe severe şi adesea contradictorii privind costurile, aspectul estetic, termenele de execuŃie, dimensiunile de gabarit, fiabilitatea etc. Îndeplinirea acestor cerinŃe duce la considerarea unor restricŃii pe care trebuie să le satisfacă calculele, cele mai des întânlite fiind: valorile maxime ale tensiunilor, deplasărilor şi/sau deformaŃiilor, coeficientul de siguranŃă la flambaj, la rupere sau la oboseală, minimum de sensibilitate la imperfecŃiuni de execuŃie, de montaj sau de exploatare, frecvenŃele modurilor fundamentale de vibraŃii, viteza de deformare în curgerea plastică staŃionară, durata de viaŃă, greutatea, volumul, rigiditatea la diverse solicitări, momentele de inerŃie, stabilitatea statică şi dinamică, comportarea la solicitări dinamice. Mai pot fi avute în vedere diferitele moduri de rupere, suprasarcinile la transport, la montaj sau în exploatare, precum şi prevederile diverselor legi, standarde, norme etc. În prezent, marea majoritate a calculelor inginereşti cerute pentru sinteza, proiectarea şi analiza unui produs se pot face cu metoda elementelor finite (MEF). În condiŃiile proiectării asistate de calculator (CAD) şi a fabricaŃiei asistate de calculator (CAM), analiza cu elemente finite (FEA) devine o componentă a unui proces unitar – integrat, aşa cum se poate vedea în figura 1.2. Trebuie remarcat faptul că în succesiunea CAD – FEA – CAM există un proces iterativ de proiectare – calcul - execuŃie. În acest proces se realizeză succcesiv operŃii de sinteză şi de analiză ale prototipului şi ale modelului pentru calculul cu elemente finite (fig. 1.2). La fiecare iteraŃie a procesului se aduc îmbunătăŃiri ale prototipului şi (sau) ale modelului de calcul, până când se ating performanŃele dorite.
Figura 1.2 Analiza cu elemente finite (FEA) a modelului unei structuri de rezistenŃă este un calcul numeric de verificare, adică pentru o anumită geometrie definită dimensional, pentru o încărcare dată şi condiŃii de rezemare bine precizate se obŃin valorile deplasărilor, tensiunilor, reacŃiunilor în reazeme, frecvenŃelor vibraŃiilor proprii etc. Nu este însă evident (în cazul general) cum trebuie modificată structura pentru ca aceasta să răspundă cât mai bine ansamblului cerinŃelor impuse. Deci nu se poate concepe o tehnică generală de optimizare automată, care să rezolve orice problemă, de orice natură. Ce se poate face, este elaborarea unei metodologii de proiectare optimă. Programele MEF actuale au implementate proceduri speciale de optimizare care permit determinarea prin calcul automat a valorilor optime ale unor parametri de proiectare astfel încât să fie satisfăcute un set de condiŃii impuse unei funcŃii obiectiv, definită de utilizator.

AVANTAJELE, DEZAVANTAJELE ŞI LIMITELE METODEI ELEMENTELOR FINITE
În prezent metoda elementelor finite (MEF) este aproape generalizată în proiectarea inginerească asistată şi are aplicabilităŃi masive în cercetarea mecanică, transmisia căldurii, electricitate, hidraulică, biomecanică etc. Avantajele MEF
Propagarea “masivă”, într-un interval de timp relativ scurt, a MEF se explică în primul rând prin avantajele sale, dintre care cele mai importante sunt: Genaralitatea. MEF este o metodă numerică aproximativă de calcul care se poate utiliza pentru rezolvarea problemelor de mecanica structurilor deformabile, mecanica fluidelor, transmisia căldurii, electromagnetism, electrostatică, biomecanică etc. Solicitările pot fi statice, dinamice, periodice, staŃionare, nestaŃionare, tranzitorii etc. Problemele pot fi liniare, neliniare (cu diverse tipuri de neliniarităŃi), dependente de timp, probleme de stabilitate, de vibraŃii, de interacŃiune etc. În prezent utilizarea MEF este limitată doar de lipsa de imaginaŃie şi ingeniozitate a potenŃialilor beneficiari. SupleŃea. Pentru abordarea unei anumite probleme concrete cu MEF, nu există nici un fel de restricŃii care să decurgă din metodă, adică elaborarea modelului de calcul al problemei date se poate face cu o libertate deplină, în care esenŃiale sunt fantezia, ingeniozitatea şi experienŃa utilizatorului. SupleŃea MEF asigură elaborarea cu foarte mare uşurinŃă a modelului de calcul şi permite automatizarea acestui proces într-o foarte mare măsură. După ce s-a realizat modelul şi s-au făcut diverse calcule cu el, într-un număr de variante privind solicitările, condiŃiile de rezemare, opŃiunile de analiză etc., se pot obŃine variante noi, îmbunătaŃite, ale modelului iniŃial, astfel încât să fie satisfăcute cât mai deplin diversele exigenŃe ale utilizatorului. Simplitatea conceptelor de bază. Pentru utilizarea MEF nu este necesar ca utilizatorul să aibă cunoştinŃe speciale de matematică sau informatică, ci este suficient ca el să fie un bun inginer, adică să aibă cunostinŃe temeinice inginereşti uzuale. Se pot întelege şi asimila, cu un efort minim, conceptele de bază ale MEF şi anume: nod, element finit, reŃea de discretizare, structură, model de calcul.
Acest atribut al MEF face ca ea să fie accesibilă unui număr foarte mare de utilizatori. Utilizarea calculatoarelor. Din chiar principiile de bază ale MEF, rezultă necesitatea efectuării unui volum foarte mare (uneori chiar uriaş) de calcule numerice, ceea ce impune implementarea metodei pe calculatoare numerice. Se constată cu uşurinŃă că de fapt dezvoltarea MEF şi a programelor care folosesc metoda s-au realizat în strânsă concordanŃă cu creşterea performanŃelor sistemelor de calcul. Această situaŃie de fapt are consecinŃe practice importante privind automatizarea şi fiabilitatea proceselor componente ale MEF şi FEA. ExistenŃa programelor de calcul cu MEF. În prezent se comercializează şi sunt accesibile numeroase programe de calcul cu MEF, deosebit de performante. Aceste programe permit analiza oricărei structuri mecanice, cu o complexitate practic nelimitată în ceea ce priveşte forma geometrică, dimensiunile, solicitările, variantele de analiză etc. Se poate afirma că, în prezent, se poate calcula orice structură mecanică cu MEF. FacilităŃi de pre şi postprocesare. MEF permite ca relativ simplu să se realizeze o mare diversitate de proceduri eficiente de preprocesare a modelului de calcul în vederea reducerii volumului de muncă, în special a discretizării automate şi a verificării acestuia. Rezultatele obŃinute în urma procesării modelului - care au de obicei un volum uriaş - pot fi prezentate sub formă de tabele, listinguri,

desene, diagrame, animaŃii, alb-negru sau color etc., astfel încât informaŃiile oferite beneficiarului să fie cât mai accesibile, sugestive, atractive, complete, precise etc. Stabilitatea algoritmilor de calcul. Eforturile a numeroşi cercetători (matematicieni şi ingineri) s-au concretizat prin elaborarea unor algoritmi şi proceduri eficiente şi sigure informatice şi matematice de calcul, destinate MEF şi FEA, care s-au verificat, s-au impus şi au fost unanim acceptate. În aceste condiŃii, MEF şi programele corespunzătoare elaborate oferă stabilitate şi siguranŃă utilizatorilor. Variante noi ale programelor includ fie extinderi ale bibliotecilor de elemente finite sau ale opŃiunilor de calcul implementate, fie noi facilităŃi de pre şi postprocesare. Dezavantajele MEF
Prin extinderea până aproape de generalizare a MEF şi FEA, precum şi prin numărul uriaş de utilizatori entuziaşti ai acestora, nu înseamnă că MEF a ajuns panaceu universal în calculele efectuate în inginerie şi în cercetare. Metoda are dezavantaje şi limite. Cele mai importante dezavantaje ale MEF sunt: Metoda este aproximativă. Analiza cu MEF nu se face pentru structura reală ci pentru un model (de calcul) al acesteia şi rezultatele obŃinute reprezintă o aproximare a stărilor de deplasări, tensiuni, temperaturi etc. din structura reală care se analizează. Dezavantajul MEF constă în aceea că nu se poate estima - în marea majoritate a situaŃiilor reale - cu un nivel de încredere cuantificabil, cât de bine aproximeză FEA soluŃia exactă (necunoscută) a problemei care se analizează. Altfel spus este foarte dificil - uneori chiar imposibil – să se estimeze care sunt abaterile valorilor mărimilor (deplasări, tensiuni, eforturi, frecvenŃe etc.) calculate cu MEF faŃă de cele reale, necunoscute. Modelul de calcul este subiectiv şi arbitrar. Utilizatorul are libertate deplină în elaborarea modelului, MEF neavând restricŃii în acest sens. SupleŃea metodei duce la suspiciuni în legatură cu corectitudinea modelului şi a eficienŃei analizei realizate cu el. În aceste condiŃii hotărâtoare sunt curajul, ingeniozitatea şi experienŃa utilizatorului în domeniul MEF şi FEA, atribute subiective şi greu de evaluat cantitativ. Elaborarea unui model de calcul performant devine astfel o artă. Din acest motiv, diverse institute de proiectare sau firme, au emis norme şi reguli de elaborare a modelelor pentru unele categorii de structuri, unele dintre acestea fiind validate în practică. Elaborarea modelului de calcul este laborioasă. Pentru realizarea modelului cu elemente finite al unei structuri este necesar din partea utilizatorului un efort considerabil şi o foarte bună cunoaştere a modului de preprocesare al programului cu elemente finite sau a interfeŃei CAD – MEF. Programele MEF sunt complexe şi scumpe. În dorinŃa de a satisface cât mai bine exigenŃele utilizatorilor şi de a face faŃă concurenŃei, firmele care elaborează programe performante pentru analize cu elemente finite au realizat produse de o foarte mare complexitate. Pentru utilizarea corectă şi eficientă a acestora li se cer utilizatorilor eforturi deosebite, pentru lungi perioade de timp. PreŃurile programelor sunt relativ mari, uneori chiar prohibitive. Limitele MEF şi FEA
Cele mai importante limite ale metodei şi analizelor cu elemente finite sunt următoarele: Precizia rezultatelor. În principiu MEF este convergentă şi soluŃia unei probleme se poate apropia oricât de mult de soluŃia exactă (necunoscută), dar nu o poate atinge (decât rareori şi numai pentru structuri foarte simple) şi nici nu se pot preciza abaterile dintre cele două soluŃii. Altfel spus, precizia soluŃiei FEA este limitată.

IneficienŃa MEF pentru unele tipuri de analize. Pentru analiza unor probleme locale, ca de exemplu, pentru unele tipuri de concentratori, posibilitaŃile MEF sunt limitate în ceea ce priveşte performanŃele de eficienŃă şi precizie ale rezultatelor obŃinute prin FEA.
Limitările programului MEF. Oricât de general şi de performant ar fi un program el are implementate doar anumite tipuri de elemente finite şi de proceduri pentru analize, preprocesări şi postprocesări, ceea ce limitează performanŃele şi posibilităŃile de utilizare ale acestuia. PerformanŃele programelor au o dinamică deosebită, la intervale de câteva luni fiind lansate pe piaŃă noi variante, mai elaborate, ale programelor care s-au impus în practica modelării şi analizei cu elemente finite. Resursele sistemului de calcul. În prezent performanŃele calculatoarelor au atins nivele extrem de ridicate şi practic nu se ivesc, în general, dificutăŃi în a realiza FEA pentru modele oricât de complexe. Atingerea limitelor resurselor sistemului de calcul se poate produce în cazuri particulare, pentru analize neliniare, dinamice, procese iterative, etc, pentru numere foarte mari ale nodurilor şi elementelor modelului, dacă parametrii calculatorului au valori relativ modeste.

2.
METODA ELEMENTELOR FINITE – CONCEPTE FUNDAMENTALE – SCURTĂ RECAPITULARE. EFICIENłA MODELĂRII CU ELEMENTE
FINITE
Simplitatea conceptelor de bază ale metodei elementelor finite (MEF) este unul dintre avantajele importanate ale acesteia. ImportanŃa însuşirii şi a înŃelegerii corecte a acestora rezultă din faptul că aceste concepte includ anumite ipoteze, simplificări şi generalizări a căror ignorare poate duce la erori grave în modelarea şi analiza cu elemente finite (FEA). Se prezintă, în continuare, cele mai importante dintre conceptele de bază ale MEF.
Structura Pentru a avea o eficienŃă cât mai ridicată, în FEA se utilizează un concept de structură mai general şi mai simplu decât în mod obişnuit. Uzual în FEA prin structură (de rezistenŃă) se înŃelege un ansamblu de bare, plăci, învelişuri şi volume (solide). De exemplu, o structură poate fi batiul unui strung paralel, trenul de aterizare al unui avion, braŃul unei balanŃe, carcasa unui reactor nuclear, corpul unui submarin, o reŃea de conducte etc. Definită astfel, noŃiunea de structură implică acceptarea ipotezei secŃiunii plane, a lui Bernoulli, pentru bare şi a ipotezei normalei rectilinii, a lui Kirchhoff, pentru plăci şi învelişuri. Acceptarea acestor ipoteze face posibilă, în MEF şi FEA – pentru bare şi plăci - înlocuirea forŃelor exterioare reale prin rezultantele interne – eforturile N, T, M – cu care sunt static echivalente, ceea ce nu este permis în teoria elasticităŃii. În analiza structurilor se poate deci introduce conceptul de forŃă concentrată, fără ca prin aceasta să se producă câmpuri de tensiuni, deformaŃii şi (sau) deplasări cu singularităŃi, aşa cum se întâmplă în teoria elasticităŃii, când aplicarea unei forŃe concentrate într-un punct al semispaŃiului elastic (problema lui Boussinesq) duce la producerea unor tensiuni şi deplasări infinite în punctul respectiv. De asemenea, conceptul sau noŃiunea de structură, definită ca mai sus permite stabilirea teoremelor deplasării unitate şi a forŃei unitate – ale lui Maxwell – precum şi a teoremelor lui Castigliano, care au un înŃeles clar în rezistenŃa materialelor şi în teoria structurilor, dar nu şi în teoria elasticităŃii. Modelul de calcul Pentru a putea efectua o analiză cu elemente finite a unei structuri, demersul hotărâtor care trebuie întreprins este elaborarea modelului de calcul al structurii respective. Toate aspectele privind acest proces se prezintă în detaliu într-un paragraf separat, datorită importanŃei subiectului. Modelele MEF sunt modele matematice aproximative ale structurii care urmează să fie analizată. Pentru trecerea de la structura reală la modelul ei de calcul nu există algoritmi şi metode generale care să asigure elaborarea unui model unic, care să aproximeze, cu o eroare prestabilită, cunoscută, structura care urmează să se aproximeze. În general este posibil ca pentru o structură să se elaboreze mai multe modele, toate corecte dar cu performanŃe diferite. Modelul pentru calculul de rezistenŃă al unei structuri se elaborează pe baza intuiŃiei, imaginaŃiei şi experienŃei anterioare a celui care face modelarea. Modelul trebuie să sintetizeze eficient toate informaŃiile disponibile referitoare la structura respectivă. Elaborarea unui model de calcul corect şi eficient depinde de anumiŃi factori şi trebuie să îndeplinească anumite condiŃii. Toate aceste aspecte se prezintă detaliat în cadrul capitolului 7 .

Discretizarea Modelul de calcul al structurii care urmează să fie supusă analizei cu elemente finite, în cazul general, este format din linii, care sunt axele barelor structurii, din suprafeŃe plane şi curbe, care sunt suprafeŃele mediane ale plăcilor componenete ale structurii şi volume, care sunt corpurile masive ale structurii. În această etapă a elaborării, modelulul este un continuu, cu o infinitate de puncte, ca şi structura dată. Discretizarea este demersul fundamental cerut de MEF şi constă în trecerea de la structura continuă (cu o infinitate de puncte) la un model discret, cu un număr finit de puncte (noduri). Această operaŃie se face “acoperind” modelul cu o reŃea de dicretizare şi se justifică prin aceea că din punct de vedere practic, ingineresc, sunt suficiente informaŃiile privind structura (ca de exemplu, cunoaşterea valorilor deplasărilor şi ale tensiunilor) într-un număr oarecare de puncte ale modelului, numărul acestora putând fi oricât de mare. Metoda elementelor finite, în mod obişnuit, defineşte necunoscutele (deplasări sau eforturi) în punctele modelului şi calculează valorile lor în aceste puncte. În aceste condiŃii, rezultă că dicretizarea trebuie făcută astfel încât să se definească un număr suficient de mare de puncte în zonele de interes, pentru ca aproximarea geometriei structurii, a condiŃiilor de rezemare şi a condiŃiilor de încărcare să fie satisfăcătoare pentru scopul urmărit de FEA. Din cele menŃionate rezultă importanŃa deosebită a modului cum se face dicretizarea modelului, motiv pentru care toate detaliile procesului de discretizare se prezintă cadrul unui capitol special, care este capitolul 6.
Nodul Punctele definite prin reŃeua de dicretizare se numesc noduri. În noduri se definesc necunoscutele nodale primare, ale căror valori sunt rezultatele FEA. Necunoscutele asociate nodurilor pot fi deplasările, caz în care MEF se numeşte model deplasare, sau eforturile, când MEF se numeşte model
echilibru. Relativ rar se foloseşte şi modelul mixt. Pentru modelul deplasare se admite că forma deformată a structurii, ca urmare a unei solicitări oarecare, este definită de deplasările tuturor nodurilor în raport cu reŃeaua nodurilor înainte de deformare, fiecare nod putând avea maximum şase componente ale deplasării, denumite deplasări nodale, în raport cu un reper global (la care este raportată structura în ansamblu): trei componente u, v, w ale deplasării liniare şi trei rotiri ϕx, ϕy, ϕz. Componentelor nenule ale deplasărilor pe care le poate avea un nod al modelului structurii în procesul de deformaŃie li se asociază un versor denumit grad de libertate geometrică – DOF al nodului, care are valoarea DOF=0, dacă pe direcŃia respectivă componenta deplasării este nulă sau cunoscută şi valoarea DOF=1, dacă deplasarea este necunoscută. Se pot defini gradele de libertate geometrică ale structurii în totalitate. Rezultă că numărul total al necunoscutelor care trebuie determinate prin calcul este egal cu numărul gradelor de libertate geometrică cărora le sunt ataşate necunoscute (care au DOF=1), pentru toate nodurile modelului structurii. Unele din gradele de libertate ale modelului trebuie “eliminate” deoarece unele noduri sunt “legate”, reprezentând reazeme şi deci deplasările lor sunt nule sau au valori cunoscute, impuse şi nu mai trebuie calculate.
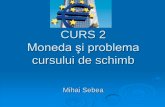
Elementul finit Procesul de discretizare are drept urmare împărŃirea modelului structurii într-un număr oarecare de fragmente sau elemente, aşa cum, de exemplu, zidul unei clădiri poate fi privit ca fiind format din cărămizile utilizate la construcŃia sa. De exemplu, recipientul din figura 2.1, executat din table asamblate prin sudură, poate fi descompus sau discretizat într-un număr de elemente patrulatere şi triunghiulare - denumite elemente finite - ca în figura 2.2. Elementele finite se leagă între ele prin nodurile comune, care sunt vârfurile patrulaterelor sau triunghiurilor (sunt şi tipuri de elemente care au noduri şi pe laturi). Un element finit poate fi privit ca o “piesă” de sine stătătoare, interacŃionând cu celelalte elemente numai în noduri. Studiul structurii reale se înlocuieşte cu studiul ansamblului de elemente finite obŃinut prin discretizare, care devine astfel o idealizare a structurii originare şi este un model de calcul al

structurii date. Pentru ca rezultatele analizei să fie cât mai precise trebuie ca procesul de idealizare al structurii date să fie cât mai “performant”, ceea ce implică respectarea unor regului şi exigenŃe privind discretizarea, elaborarea modelului de calcul şi - printre altele - utilizarea unor elemente finite adecvate. În principiu, dimensiunile elementelor finite pot fi oricât de mici, dar trebuie totdeauna să fie finite, adică nu poate fi făcută o trecere la limită prin care dimensiunile acestora să tindă spre zero. Figura 2.1 Figura 2.2
Din nefericire, nu se poate concepe un element finit general, care să aibă o utilitate universală. Pentru a putea fi implementat într-un program MEF şi utilizat pentru un model de calcul, elementul finit trebuie în prealabil “proiectat” în toate detaliile, adică trebuie definit din punct de vedere geometric, fizic, matematic etc. Privit din punct de vedere informaŃional, un element finit este un “dispozitiv” - sau un model – care trebuie să poată prelucra cât mai precis un volum cât mai mare de informaŃii, pentru un set de condiŃii impuse. Aceasta presupune ca elementul de o anumită formă geometrică, de exemplu triunghiulară, să aibă un număr cât mai mare de noduri, fiecare nod să aibă un număr cât mai mare de grade de libertate geometrică, iar funcŃiile de interpolare să fie cât mai complexe, adică să aibă un număr cât mai mare de parametri. Desigur că menŃiunile anterioare sunt de principiu, deoarece cu cât creşte “complexitatea” elementului finit cresc şi dificultăŃile de calcul, astfel încât pentru fiecare situaŃie concretă în parte se caută o soluŃie de compromis când se “concepe” un element finit de un anumit tip. O consecinŃă nefastă a acestei situaŃii este că programele MEF au biblioteci cu un număr relativ mare de tipuri de elemete finite, pentru a satisface un număr cât mai mare de cerinŃe, cât mai diverse. Ideea de bază a MEF este că, pentru un element de un tip oarecare, trebuie făcută ipoteza că deplasările din interiorul elementului variază după o lege “cunoscută”, aleasă apriori, determinată de o funcŃie de interpolare. ConsecinŃa acestui demers este că, local, acolo unde se va afla plasat elementul finit, în urma procesului de discretizare, acesta va aproxima starea de deplasări a structurii prin legea de interpolare implementată în elementul respectiv.
Figura 2.3 FuncŃiile de interpolare au frecvent forma unor polinoame. Alegerea gradului polinomului şi determinarea valorilor coeficienŃilor acestora trebuie să asigure o cât mai bună aproximare a soluŃiei

exacte – necunoscute – a problemei date. În figura 3 se prezintă schematic modul în care polinoamele de gradul zero, unu şi doi – respectiv cu unu, doi şi trei termeni - pot aproxima o stare de deplasări oarecare. Elementele care au aceleaşi tipuri de funcŃii (de obicei polinoame), atât pentru definirea geometriei elementului (de exemplu, pentru laturile sale), cât şi pentru definirea deplasărilor în interiorul său (funcŃia de interpolare), se numesc elemente izoparametrice şi sunt cele mai eficiente şi folosite elemente finite în practica MEF. Elementele finite se pot clasifica după diverse criterii, dintre care cele mai importante sunt: Tipul de analiză. Pe o reŃea de discretizare se pot defini elemente finite care au “incluse” diverse proceduri matematice destinate unor analize diverse, ca, de exemplu: liniar elastică, neliniară, transfer de căldură, mecanica fluidelor, electro magnetism, electro magnetism de înaltă frcvenŃă etc. Rolul funcŃional. Elementele finite utilizate pentru modelarea unei structuri trebuie să poată asigura cât mai bine “rolul funcŃional” al structurii date, adică, de exemplu, o grindă cu zăbrele trebuie modelată cu elemente de tip bară, un capac din tablă subŃire trebuie modelat prin elemente de tip placă, o fundaŃie prin elemente de tip cărămidă etc. Din aceste considerente elementele sunt de tip punct (element de masă sau de tip arc), de tip linie (elemente de bare drepte sau curbe, în plan sau în spaŃiu) de tip suprafaŃă (elemente de plăci plane sau curbe, groase sau subŃiri, în plan sau în spaŃiu, elemente axial simetrice, de membrană etc) sau de tip volum (elemente spaŃiale, - 3D – pentru structuri “solide”, compozite, cu număr variabil de noduri, pentru fluide, piezoelectrice, magnetice etc). Fiecare din categoriile de elemente enumerate au mai multe variante, numărul acestora putând ajunge la câteva zeci. De asemenea, categoriile prezentate includ şi elemente cu rol funcŃional special, ca de exemplu: rigid, de contact, de frecare, de legătură, definit prin matricea de rigiditate etc. Forma geometrică. Elementele finite au, în general, forme simple ca, de exemplu, linie dreaptă sau arc de cerc, triunghi, patrulater oarecare, tetraedru, hexaedru etc. De asemenea, unele caracteristici geometrice pot fi constante sau variabile, ca secŃiunile barelor sau grosimile plăcilor. Numărul nodurilor. Pentru unele dintre elemente, o formă geometrică dată, de exemplu un triunghi, poate avea mai multe variante în ceea ce priveşte numărul de noduri, deoarece în afara nodurilor din vârfuri mai pot exista noduri şi pe laturi şi (sau) în interior. De asemenea se pot utiliza noduri şi în interiorul elementului, pentru rezultate. Se utilizează şi elemente cu număr variabil de noduri, ca, de exemplu, pentru plăci groase elementul poate avea între 8 şi 48 de noduri. Numărul gradelor de libertate ale fiecărui nod. Nodurile elementelor au ataşate, implicit, unele DOF din cele şase posibile, deci se poate opera şi cu numărul total de DOF pentru un element, care este numărul nodurilor înmulŃit cu numărul DOF pe nod. Gradul polinomului de interpolare. Fiecare element finit are “implementate” polinoame de interpolare de un anumit grad, începând cu gradul întâi. Cu cât gradul polinoamelor este mai ridicat cu atât creşte cantitatea de informaŃii cu care elementul operează şi deci el este, în general, mai performant. Caracteristicile materialului. În practica FEA, materialul elementului finit poate fi omogen şi izotrop sau cu o anizotropie de un anumit tip. De asemenea, constantele elastice şi fizice ale materialului pot fi dependente de temperatură sau solicitare. Trebuie făcută precizarea că descrierea de mai sus a elementelor finite nu este exhaustivă, ci că ea doar semnalează unele aspecte importante din practica MEF. În concluzie, se menŃionează că fiecare tip de element finit este un ansamblu de condiŃii şi ipoteze şi el trebuie privit ca un întreg şi folosit ca atare, numai după ce s-a studiat temeinic documentaŃia care îl însoŃeşte. De exemplu, din parametrii care definesc elementul rezultă comportarea sa la solicitare, tipul stării de tensiuni, interacŃiunea sa cu celelalte elemente etc. Programele MEF care se folosesc în practica FEA au biblioteci cu un număr impresionant de tipuri de elemente finite, la care se adaugă periodic elemente noi. Pentru a ilustra dinamica dezvoltării MEF, se citează articolul [1], în care încă din anul 1984 se identificaseră 88 de variante ale elementelor finite de placă.

Aproximarea şi interpolarea Un model matematic pentru analiza unei structuri de rezistenŃă implică determinarea unui număr de variabile şi funcŃii u*( ξ) reprezentând deplasări, deformaŃii, tensiuni etc, ξ fiind funcŃii de coordonate ξ(x,y,z), definite în punctele domeniului pe care este definită structura. Dacă soluŃia exactă u*(ξ) nu se cunoaşte şi u(ξ) este o aproximare a acesteia, funcŃia eroare e(ξ) este e(ξ) = u(ξ) - u*(ξ). ( 2.1) Pentru constituirea unei soluŃii aproximative este suficient să se descrie o expresie care să conŃină n parametrii de aproximare ai
u(ξ) = u(ξ, a1, a2, …,an) şi să se determine aceşti parametri pe baza relaŃiei (2.1) şi a unui criteriu de convergenŃă adecvat. În MEF aproximarea este nodală şi are forma
u( ξ) = [ N1(ξ) N2(ξ) … Nn (ξ) ]
n
2
1
u
.
.
u
u
= [N]Tun,
în care: ui sunt parametrii nodali ai aproximării şi au o semnificaŃie fizică concretă (deplasări nodale, temperaturi nodale etc); Ni(ξ) - funcŃii de interpolare sau de aproximare, care de regulă au forme polinomiale. SoluŃiile aproximative u(ξ) pot fi construite pe întreg domeniul V de definiŃie a structurii sau pe subdomenii elementare Ve – ale elementelelor finite - ceea ce înseamnă că Σ Ve ≡ V . În MEF aproximaŃia nodală se face pe subdomenii Ve, care sunt de fapt elementele finite, valorile funcŃiilor aproximative ui( ξ) = u*(xi) fiind variabilele nodale ale problemei iar xi, coordonatele nodurilor. În mecanica structurilor se poate construi o funcŃională π care este energia potenŃială totală a structurii. Impunând acestei funcŃionale condiŃia de staŃionaritate
δπ = W = 0, se obŃine ecuaŃia caracteristică
W(u) = 0dV)fw(L(u)R(u)wdV v =−=∫ ∫V V
în care: L(u) este soluŃia exactă a problemei; fV – soluŃia aproximativă; R(u) = (L(u) - fV) - funcŃia reziduu; w - funcŃii pondere, denumite şi funcŃii de corecŃie. Precizia soluŃiei u depinde de alegerea funcŃiilor de pondere w, care au uzual forma
∑=
=k
1i
w βiψi ,
în care: ψi sunt un set de funcŃii liniar independente; βi - coeficienŃi numerici arbitrari. Presupunând că soluŃiile aproximative u satisfac condiŃiile de margine ale structurii, eroarea de aproximare reprezentată de rezidul R(u) este ponderată (distribuită) prin multiplicare cu funcŃiile de pondere w, pe întreg domeniul V. Dacă funcŃionala structurii este π(u) aceasta se poate aproxima prin procesul de discretizare, devenind π(u) = π[u (a1, a2, …,an)],

sau ..... n n
22
11
δaa
πδa
a
πδa
a
πδπ
∂
∂
∂
∂
∂
∂= +++
Se obŃine sistemul de ecuaŃii
,n,,2,1i,0a
π
i...==
∂
∂
prin rezolvarea căruia se determină parametrii ai ai aproximării şi se rezolvă problema MEF.
Tabelul 2.1
Metoda
elementelor finite
Principiul varaiŃional
Tipul funcŃiilor Din interiorul elementului
CondiŃiile impuse
în lungul frontierelor
dintre elemente
Necunoscutele
din sistemul final de ecuaŃii
Model deplasare, cu elemente conforme
Minimum energiei
potenŃiale
Deplasări continue
Compatibilitatea deplasărilor
Deplasările nodale
Model echilibru
Minimum energiei
complementare
Tensiuni continue aflate
în echlibru
Echilibrul eforturilor de pe
frontiere
a. Deplasări generalizate b. Eforturi parametrice
Metoda hibridă a eforturilor
Energia complementară
modificată
Tensiuni continue aflate
în echlibru
Compatibilitatea deplasărilor
Deplasările nodale
Metoda hibridă a deplasărilor
(1)
Energia potenŃială modificată
Deplasări continue
Compatibilitatea deplasărilor
Deplasările nodale
H I
B R I D
Metoda hibridă a deplasărilor
(2)
Energia potenŃială modificată
Deplasări continue
Echilibrul eforturilor de pe
frontiere
Deplasările nodale şi
eforturile de pe Frontiere
Principiul lui
Reissner
Metoda lui Reissner
modificată de Herrmann
Continuitatea Eforturilor şi FuncŃii ale
deplasărilor
Combinarea eforturilor şi
deplasărilor de pe frontiere
Combinarea eforturilor şi deplasărilor
Metoda
generalizată a deplasărilor
Energia
potenŃială modificată
Deplasări continue
Multiplicatorii Lagrange pentru
eforturi
Deplasările nodale şi
Multiplicatorii Lagrange
M I X T
Metoda generalizată a
eforturilor
Energia complementară
modificată
Tensiuni continue aflate
în echlibru
Multiplicatorii Lagrange pentru
Deplasări
Deplasările nodale şi
Multiplicatorii Lagrange
Varaiante conceptuale de formulare a MEF Când a apărut MEF, prin anii “60, fundamentarea matematică era foarte sumară, utilizarea metodei făcându-se mai mult intuitiv. Ulterior, pe măsura clarificării conceptelor de bază, MEF a fost formulată

în diverse variante, dintre care cele mai cunoscute au fost trecute în revistă în lucrarea [2], în anul 1969 şi în lucrarea [1], în 1984, din care se reproduce Tabelul 2.1. Se menŃionează faptul că şi în prezent se utilizează mai multe formulări ale MEF, fiecare variantă având avantajele, dezavantajele, susuŃinătorii şi utilizatorii ei. Dar aceste aspecte aparŃin mai ales speculaŃiilor matematice şi nu fac obiectul prezentei lucrări. În programele MEF actuale se foloseşte mai ales modelul deplasare, pentru care neconoscutele sunt deplasările nodale.
EFICIENłA MODELELOR CU ELEMENTE FINITE
Modelul elaborat pentru o structură oarecare, în vederea realizării unei analize cu elemente finite (FEA), trebuie să asigure obŃinerea unor rezultate corecte şi sigure, pe de o parte, iar pe de alta, el, modelul, trebuie să fie eficient. Principalele condiŃii pe care trebuie să le îndeplinească modelul pentru a fi eficient sunt: - elaborarea modelului să se facă cu un volum de muncă rezonabil; - modelul să valorifice toate informaŃiile disponibile privind structura care se analizează; - volumul informaŃiilor obŃinute în urma FEA să fie suficient de mare şi cu un nivel de încredere acceptabil, având în vedere scopul urmărit, destinaŃia informaŃilor şi modul de valorificare a acestora. În vederea satisfacerii acestor ceriŃe, la dispoziŃia fiecărui utilizator se află diverse şi nenumărate căi şi mijloace, cele mai importante fiind: ConfiguraŃia discretizării. Este comod şi raŃional ca reŃeaua de discretizare a modelului să fie cât mai simplă şi cât mai uniformă, ca, de exemplu, cea a unui recipient, din figura 11.1. Dar acest deziderat este în contradicŃie cu cerinŃa de eficienŃă a modelului. Se impune ca discretizarea să aibă în vedere configuraŃia estimată a stării de tensiuni a structurii şi deci şi a modelului, adică în zonele cu gradienŃi mari ai stării de tensiuni discretizarea să fie fină, iar în celelalte zone mai grosieră. Trecerea de la elemente cu dimensiuni mici la unele cu dimensiuni mari trebuie să se facă progresiv, ca, de exemplu, în figura 11.2, pentru fundul aceluiaş recipient, în varianta cu elemente shell patrulatere şi triunghiulare.
Figura 11.1 Figura 11.2 Numărul nodurilor modelului. În principiu, este bine ca modelul să aibă un număr de noduri cât mai mare, deoarece rezultatele FEA sunt mai precise şi volumul informaŃiilor obŃinute este mai mare. CerinŃa de a discretiza structura printr-o reŃea cât mai fină, cu un număr cât mai mare de noduri, trebuie privită critic, cu foarte multă prudenŃă şi discernământ deoarece creşterea excesivă a numărului de noduri nu duce la îmbunătăŃirea soluŃiei. În general mărirea numărului de noduri este eficientă pentru un model cu număr relativ mic de noduri. După ce acesta a atins un anumit prag, creşterea

numărului de noduri nu mai duce la îmbunătăŃirea soluŃiei FEA. În ceea ce priveşte numărul de elemente ale modelului acesta are o dependenŃă liniară în funcŃie de numărul nodurilor, dacă tipurile elementelor nu se schimbă. Pentru o discretizare cvasi uniformă a unui model, alura obişnuită a curbelor care reprezintă dependenŃa, de exemplu, a valorilor maxime ale deplasării nodale rezultante (totale), δ şi a tensiunii echivalente (von Mises) pe element σech se prezintă în figura 11.3. Pentru o creştere de patru ori a numărului de noduri, se obŃine: - în partea stângă a figurii, adică pentru valori mici ale numărului de noduri, creşterea valorii deplasării δ este de 24 %, iar pentru valoarea tensiunii σech creştera este de 70 %; - în partea dreaptă a figurii, adică pentru valori mari ale numărului de noduri, creşterea valorii deplasării δ este de 8 %, iar pentru valoarea tensiunii σech creştera este de 23 %.
Figura 11.3 Se ajunge la concluzia că pentru o aceeaşi creştere a numărului de noduri, efectul asupra rezultatelor FEA este de trei ori mai mic pentru valori mari decât pentru valori mici ale numărului de noduri. Pentru a asigura o creştere a eficienŃei modelului este preferabil ca o mărire moderată a numărului de noduri şi de elemente ale acestuia să fie însoŃită şi de o discretizare neuniformă, adaptată configuraŃiei stării de tensiuni a modelului. Forma curbelor din figura 11.3 sugerează întrebarea dacă acestea tind fiecare către o asimptotă şi dacă asimptotele respective corespund sau nu soluŃiei exacte a problemei analizate. Un răspuns categoric nu poate fi formulat în cazul general al FEA. Dimensiunile elementelor finite. O alternativă la cerinŃa privind numărul de noduri este cea a dimensiunilor elementelor, aceste două aspecte ale modelării fiind strâns legate între ele. Pentru structura supusă FEA se vor stabili, în funcŃie de configuraŃia acesteia şi de scopul analizei, dimensiunile maxime şi minime ale elementelor finite ale modelului. Desigur că acestă operaŃie presupune că anterior s-au stabilit tipurile elementelor ce se vor utiliza pentru diversele regiuni ale modelului şi că utilizatorul cunoaşte foarte bine proprităŃile şi performanŃele lor. Dimensiunile maxime ale elementelor se vor stabili având în vedere că elementele “mari” aproximează, în general, mai prost geometria şi starea de tensiuni decât cele “mici”, dar acestea au dezavantajul că pot deveni excesiv de numeroase. În concluzie, intuitiv trebuie găsită o soluŃie de compromis în ceea ce priveşte dimensiunile maxime şi minime ale elementelor şi aceasta pentru diversele regiuni ale modelului. Se menŃionează faptul că diversele variante ale procedurilor de discretizrie automată, implementate în programele MEF, au în vedere definirea ca parametrii ai procesului fie numărul nodurilor, fie dimensiunile (maxime sau minime) ale elementelor. Generarea automată. Pentru ca elaboarea modelului să se facă cu un volum de muncă minim, adică pentru ca demersul să fie cât mai eficient, programele MEF au implementate proceduri de generare “dirijată” a nodurilor şi elementelor, altele decăt cele de discretizare automată. După ce s-au definit

unele dintre nodurile si elementele modelului, flosindu-se de acestea ca “surse”, utilizatorul dispune de o mulŃime de comenzi prin care poate “genera” noi noduri şi elemente. Cele mai utilizate comenzi de generare automată sunt:
a. atât pentru noduri cât şi pentru elemente: - copiere, repoziŃionare, mutare, alipire; operaŃii care constau în modificarea poziŃiei nodurilor şi elementelor “sursă” prin operaŃii de translaŃie şi rotaŃie corespunzătore, pentru obŃinerea nodurilor şi elementelor “generate”, dorite; - simetrie faŃă de un punct, o direcŃie sau un plan; se generează noduri şi elemente simetrice cu cele “sursă”; - schimbarea scalei; constă în multiplicarea cu un factor a valorilor coordonatelor nodurilor şi elementelor “sursă”; b. numai pentru elemente: - “extrudare”, “alunecare”, “măturare”, “târâre”; operaŃii care duc la “acoperirea” suprafeŃelor sau “umplerea” volumelor obŃinute, cu elementele generate şi, implicit, cu nodurile corespuzătoare. Fiecare procedeu se defineşte într-un mod oarecare în programele MEF. Genearea implică şi operaŃia de numerotare automată a noilor noduri şi elemente. Tipurile elementelor finite. Programele destinate FEA au biblioteci cu sute de tipuri de elemente finite, dintre care utilizatorul trebuie să le aleagă pe cele mai eficiente pentru modelarea structurii date. Alegerea se face pe baza intuiŃiei şi experienŃei utilizatorului. MEF nu conŃine “indicaŃii” sau restricŃii în această privinŃă. Pentru a asigura eficienŃa modelului, trebuie ca tipurile de elemente să fie alese în funcŃie de numeroşi factori şi condiŃii, dintre care primul este funcŃionalitatea, adică elementele să poată “simula” cât mai bine: principiile constructive, preluarea şi transmiterea sarcinilor, reproducerea stărilor de deplasări şi de tensiuni, asigurarea condiŃiilor de rezemare, libertatea producerii anumitor deplasări şi împidicarea altora etc. De exemplu, pentru o construcŃie realizată din profile laminate se vor folosi elemente de tip bară, pentru un utilaj exectutat din table sudate se vor alege elemente de tip placă sau înveliş, iar pentru o reŃea de conducte se vor utiliza elemente de tip Ńeavă. Pentru ilustrarea unora dintre aspectele menŃionate mai sus privind eficienŃa modelului de calcul, în figura 11.4 se prezintă un răcitor de gaz de mari dimensiuni (diametrul conductei 2.5 m şi înălŃimea totală ≈7 m). În figura 11.5 se prezintă modelul de calcul, discretizat cu elemente shell cu patru şi trei noduri (fig. 11.5.a), şi numai cu elemente shell cu trei noduri (fig. 11.5.c). În figurile 11.5.b şi 11.5.d se prezintă detalii ale discretizării în zona reazemelor. Solicitarea răcitorului constă în: presiune exterioară de 1 bar = 0.1 N/mm2 (vacuum), greutatea proprie, sarcină verticală pe flanşa superioară şi o forŃă concentrată verticală, aplicată într-un nod, în zona inferioară. Fixarea este asigurată de cele patru reazeme. Ambele modele au avut 932 de noduri. Modelul din figura 11.5.a a avut 896 de elemente shell cu patru noduri şi 36 de elemente shell cu trei noduri, folosite numai pentru unele zone de trecere, cu scopul de a obŃine o discretizare cu o configuraŃie cât mai simplă. Modelul din figura 11.5.c, cu 1828 elemente shell triunghiulare, a fost obŃinut din modelul din figura 11.5.a astfel: cele 896 elemente shell patrulatere au fost împărŃite în câte două triunghiuri, obŃinându-se astfel 2*896 = 1792 triunghiuri, la care s-au adăgat cele 36 inŃiale, rămase nemodificate. ReŃeaua de discretizare (coordonatele nodurilor) a rămas nemodificată.

Figura 11.4
a. b. c. d.
Figura 11.5 S-au efectuat cinci rulări pentru cele două modele astfel: o rulare pentru modelul cu elemente triunghiulare şi patru rulări pentru celălalt model (fig. 11.5a), corespunzătoare celor patru variate de utilizare ale elementelor shell4 şi anume: un singur patrulater, descompus în două triunghiuri, descompus în patru triunghiuri şi varianta când pentru solicitarea de membrană se folosesc polinoame de grad superior. Pentru elementele folosite s-a avut în vedere faptul că acestea sunt implementate în programele destinate FEA în două variante: ca elemente de placă curbă subŃire (thin shell) şi ca elemente de placă curbă groasă (thick shell). Datele de intrare şi informaŃiile furnizate de cele două tipuri de elemente shell (subŃiri şi groase) sunt identice. În diversele programe trebuie văzut cum au fost concepute, ce asemănări şi deosebiri au cele două tipuri de elemente. În teoria plăcilor plane şi curbe (a învelişurilor) nu este foarte clar cum se defineşte placa subŃire şi cea groasă. În principiu diferenŃirea lor se face în funcŃie de valoarea raportului dintre raza de curbură medie R şi grosimea h. Curent dacă R/h ≥ 10 placa se consideră subŃire. Pentru structura prezentată R=1250 mm şi h=10 şi 20 mm, deci învelişul este subŃire. Rezulatele obŃinute se prezintă în tabelul 11.1. Se dau valorile maxime ale tensiunilor echivalente von Mises σech în noduri şi în elemente, valorile deplasărilor nodale rezultante maxime δrez , valorile

factorului de estimare a erorii, precum şi valorile multiplicatorului sarcinilor la flambaj pentru primul mod de pierdere a stabilităŃii, adică valorile a cinci mărimi. Tabelul 11.1
Tensiunea
σech. max. [N/mm2]
Vari anta
Elemente
finite
Tipul
elementului
σech/ nod
σech/ elem.
Depla-sarea rezul- tantă
maximă δrez.
[mm]
Facto-rul de
esti-mare
a erorii [%]
Multi-plicatorul
sarcinii la
flambaj
subŃire 63.34 41.83 2.755 38.89 3.388 1
1828 elemente
triunghiulare
Triunghi shell3 sau
shell3T gros 36.96 43.08 2.819 36.44 3.366
subŃire 69.30 35.97 2.551 38.54 3.371 2
Un patrulater
gros 46.06 48.34 2.214 52.32 3.543 subŃire 64.44 36.82 2.081 34.00 3.383
3 Descompus în 2 triunghiuri gros 37.87 33.16 2.109 29.29 3.469
subŃire 64.38 33.40 2.408 31.72 3.408 4
Descompus în 4 triunghiuri gros 35.98 33.89 2.436 28.66 3.389
subŃire
68.31
36.02
2.566
38.44
3.356
5
896 elemente
patrulatere shell4 sau shell4T şi 36
elemente triunghulare shell3 sau shell3T
P
a
t
r
u
l
a
t
e
r
e
Polinoame de grad superior
pentru solicitarea de
membrană gros 48.21 48.84 2.227 52.93 3.527
Pentru cele 10 variante ale FEA ar fi trebuit; în principiu, să se obŃină rezultate foarte apropiate. Din analiza valorilor prezentate în tabelul 11.1 se pot formula următorele concluzii şi observaŃii: - VariaŃiile maxime ale celor cinci mărimi calculate sunt: σech/nod = 92.61 %; σech/element = 47.28 %; δrezultant = 35.46 %; factorul de estimare a erorii = 84.68 %; multiplicatorul sarcinii la flambaj = 5.57 %. Se poate trage concluzia că variaŃiile maxime ale celor cinci mărimi sunt foarte mari, mai ales, pentru tensiunea echivalentă în noduri. - VariaŃiile tensiunilor din noduri şi elemente (pentru aceeşi variantă de calcul): [σech/nod / σech/element] maxim = 92.75 % pentru elemente shell4 (subŃiri), descompuse în patru triunghiri (varianta 4 de calcul); [σech/nod / σech/element] minim = - 1.29 % pentru elemente shell4T (groase), cu polinoame de grad superior pentru solicitarea de membrabnă (varianta 5 de calcul); Se constată că modelarea cu elemente shell subŃiri sau groase duce la rezultate foarte diferite. - VariaŃiile maxime ale celor cinci mărimi calculate pentru elementele shell4 subŃiri (thin) sunt: σech/nod = 9.41 %; σech/element = 25.24 %; δrezultant = 32.39 %; factorul de estimare a erorii = 22.60 %; multiplicatorul sarcinii la flambaj = 1.55 %. - VariaŃiile maxime ale celor cinci mărimi calculate pentru elementele shell4T groase (thick) sunt:

σech/nod = 33.99 %; σech/element = 47.28 %; δrezultant = 33.66 %; factorul de estimare a erorii = 84.68 %; multiplicatorul sarcinii la flambaj = 5.26 %. Marea varietate a tipurilor de elemente finite disponibile şi uşurinŃa cu care acestea se pot schimba (se schimbă doar numele sau varianta tipului) oferă utilizatorului posibilitatea de a obŃine un mare număr de variante ale modelului, în vederea alegerii configuraŃiei optime a acestuia. Din nefericire, nu este evident totdeauna care este modelul optim şi deci cel eficient. Concluzie. VariaŃia foarte mare a valorilor obŃinute pentru modele la care s-au folosit diferite tipuri de elemente finite – circa 100 % pentru tensiunile în noduri şi aroximativ 30 % pentru deplasări – atrage încă o dată atenŃia asupra importanŃei felului cum a fost elaborat modelul de calcul. Bibliografie 1. Hrabok M. M., Hrudey T. M., A review and catalogue of plane bending finite elements. Comput.
Structures, 19 (3), 479-495 (1984). 2. Pian H.H., Tong P., Basis of finite element methods for solid continua. Int. J. Numer. Meth.
Engng. 1 (1), 3-28 (1969).

3.
CONCEPTE DE BAZĂ ÎN MODELAREA CU ELEMENTE FINITE. ELEMENTE FUNDAMENTALE DIN TEORIA ELASTICITĂłII
Introducere Elementele de rezistenŃă ale unei structuri sunt în general solide. Un corp solid, la scară microscopică se compune din molecule, atomi, nuclee, electroni etc. Studiul corpurilor la scară microscopică, pentru a obŃine comportarea de ansamblu, este dificil de abordat. Este posibil însă, să se dezvolte o teorie fundamentată pe legi matematice şi fizice a mediului considerat continuu, care este verificată de comportarea experimentală a solidului deformabil. De obicei această teorie se completează cu o serie de ipoteze simplificatoare. Dacă comportarea materialului, forŃă - deformaŃie, este descrisă de o relaŃie elastică atunci se discută de teoria elasticităŃii. Dacă însă comportarea materialului este în domeniul plastic se discută despre teoria platicităŃii. În continuare se prezintă câteva elemente de bază ale teoriei elasticităŃii, pentru materiale cu comportare liniar elastică, care se deformează foarte puŃin în prezenŃa unor încărcări (în domeniul deformaŃiilor mici), astfel încât ecuaŃiile de echilibru se consideră pentru structura nedeformată. De regulă, analiza unei structuri tehnice complexe este un proces iterativ şi se face pe cât posibil pe câte un element component din structură sau subansamblu. Pentru aceasta este necesar a se introduce toate efectele corpurilor vecine asupra elementului de analizat. Figura 3.1 prezintă un astfel de corp, căruia i se asociază un sistem de referinŃă cartezian drept XYZ. Solicitările în general sunt produse de efectul corpurilor vecine (presiuni de contact între solide, presiuni cauzate de fluide în contact cu corpul, dilatarea produsă de variaŃia temperaturii) şi de forŃele de inerŃie (produse de gravitaŃie, de mişcarea de translaŃie accelerată sau mişcarea de rotaŃie).
Figura 3.1 Figura 3.2
DefiniŃii şi notaŃii
ForŃe. AcŃiunea unui corp asupra altui corp defineşte o forŃă. Întotdeauna forŃele apar perechi acŃiune-reacŃiune şi trebuie avut în vedere despre ce fel de forŃe se discută. În teoria elasticităŃi forŃele sunt mărimi vectoriale, cu punctele de aplicaŃie fixate (vectori legaŃi). ForŃele de inerŃie (de volum) se definesc de obicei în sistemul global de axe prin vectorul
TVzVyVxV pppp = , (3.1)
în care Vxp , Vyp , Vzp sunt funcŃii continue, de obicei pe tot domeniul de analiză.
ForŃele de presiune (de suprafaŃă), care acŃionează numai pe conturul domeniului de analiză, se definesc în sistemul global de axe, sau uneori în sisteme de referinŃă locale, prin vectorul

TSzSySxS pppp = , (3.2)
în care Sxp , Syp , Szp sunt funcŃii continue pe suprafeŃele pe care se aplică.
ForŃele concentrate reprezintă suma forŃelor de presiune (fig. 3.2) care lucrează pe o suprafaŃă foarte mică în comparaŃie cu suprafaŃa totală a domeniului de analiză. Acestea sunt mărimi "echivalente" cu care se lucrează uneori în scopul simplificării problemei atunci când nu interesează efectul local şi se notează
Tz,iy,ix,ii FFFF = . (3.3)
Uneori distribuŃia forŃelor de presiune este de aşa natură încât se reduce la un torsor echivalent, adică o forŃă concentrată şi un moment.
Deplasări. Deplasarea defineşte modificarea poziŃiei unui punct în raport cu un sistem de referinŃă fix. Ea are o componentă elastică şi una de corp rigid. Câmpul deplasărilor, se defineşte prin vectorul
Twvuu = , (3.4)
în care u = u(x,y,z), v = v(x,y,z), w = u(x,y,z) reprezintă funcŃiile deplasărilor liniare pe cele trei direcŃii ale sistemului de referinŃă considerat (de obicei, sistemul de referinŃă global). Pentru plăci, învelişuri şi bare se introduc şi rotirile, care împreună cu deplasările, formează deplasările generalizate.
Tensiuni. Gradul de solicitare al unui corp într-un punct (element de volum infinitesimal) se defineşte prin tensorul tensiunilor care are nouă componente, dintre care şase independente. Starea de tensiune într-un punct se defineşte în sistemul de referinŃă global (fig. 3.3.a), sau în alt sistem de referinŃă, prin vectorul tensiunilor independente (deoarece yxxy τ=τ , zyyz τ=τ şi xzzx τ=τ )
Tzxyzxyzyx τττσσσ=σ , (3.5)
sau echivalent prin tensiunile principale 321 σ>σ>σ în sistemul de referinŃă rotit ZYX ′′′ (denumit al
direcŃiilor principale), faŃă de sistemul de referinŃă global (fig. 3.3.b). Tensiunile σ sunt normale iar τ tangenŃiale.
a. b. Figura 3.3
DeformaŃii specifice. Similar tensiunilor se defineşte vectorul deformaŃiilor specifice

Tzxyzxyzyx γγγεεε=ε , (3.6)
în care ε sunt deformaŃii specifice liniare, iar γ deformaŃii specifice unghiulare. Se menŃionează că tensiunile şi deformaŃiile specifice sunt mărimi tensoriale. Având în vedere simetria acestor mărimi, pentru simplitate, se utilizează vectorii asociaŃi prezentaŃi mai sus.
Transformarea mărimilor prin schimbarea axelor de coordonate
Fie două sisteme de referinŃă carteziene drepte XYZ şi ZYX ′′′ , rotite între ele, sistemul al doilea fiind definit prin cosinusurile unghiurilor ℓ , m, n dintre perechile de axe, astfel
Axele X Y Z X′ 1ℓ 1m 1n
Y′ 2ℓ 2m 2n
Z′ 3ℓ 3m 3n
În continuare, mărimile notate cu prim reprezintă valorile raportate la sistemul de referinŃă notat cu prim, iar celelalte corespund sistemului de referinŃă iniŃial.
Transformarea deplasărilor şi rotirilor se efectuează cu o relaŃie de forma
[ ] uu λ=′ , (3.7)
în care
[ ]
=λ
333
222
111
nm
nm
nm
ℓ
ℓ
ℓ
,
(3.8)
este matricea cosinusurilor directoare.
Transformarea tensiunilor se efectuează cu o relaŃie de forma
[ ] σ=σ′σT , (3.9)
în care
[ ]
+++
+++
+++=σ
311331133113131313
233223322332323232
122112211221212121
333333231
23
23
22222222
22
22
11111121
21
21
nnnmnmmmnnmm
nnnmnmmmnnmm
nnnmnmmmnnmm
n2nm2m2nm
n2nm2m2nm
n2nm2m2nm
T
ℓℓℓℓℓℓ
ℓℓℓℓℓℓ
ℓℓℓℓℓℓ
ℓℓℓ
ℓℓℓ
ℓℓℓ
.
(3.10)
Transformarea deformaŃiilor specifice se efectuează cu o relaŃie de forma
[ ] ε=ε′εT , (3.11)
în care

[ ]
+++
+++
+++=ε
311331133113131313
233223322332323232
122112211221212121
333333231
23
23
22222222
22
22
11111121
21
21
nnnmnmmmnn2mm22
nnnmnmmmnn2mm22
nnnmnmmmnn2mm22
nnmmnm
nnmmnm
nnmmnm
T
ℓℓℓℓℓℓ
ℓℓℓℓℓℓ
ℓℓℓℓℓℓ
ℓℓℓ
ℓℓℓ
ℓℓℓ
.
(3.12)
ObservaŃie! Pentru transformări între sisteme de referinŃă diferite, spre exemplu dintr-un sistem de referinŃă cartezian într-un sistem de referinŃă cilindric sau sferic, expresiile matricelor de transformare [ ]σT şi [ ]εT de mai sus trebuie reformulate.
RelaŃii între deplasări şi deformaŃii specifice
DeformaŃiile specifice liniare şi unghiulare se pot determina din funcŃiile deplasărilor. Uneori aceste
relaŃii poartă denumirea de condiŃii de compatibilitate geometrică, deoarece se obŃin din examinarea câmpului deplasărilor. Se consideră un element de suprafaŃă dreptunghiular, de dimensiuni infinitesimale dx dy, în starea nedeformată a structurii, ca urmare a solicitărilor, se constată o modificare atât a dimensiunilor dreptunghiului cât şi a formei lui (fig. 3.4). Dacă deplasările sunt mici rezultă că modificarea lungimilor laturilor 01 şi 02 ale elementului dx dy, produce deformaŃiile specifice liniare
x
ux
∂
∂=ε ;
y
vy
∂
∂=ε ,
(3.13)
iar modificarea unghiului drept 012 duce la deformaŃia specifică unghiulară
y
u
x
v21xy
∂
∂+
∂
∂=β+β=γ .
(3.14)
Pentru un element de volum dzdydx , aceste relaŃii se completează şi se scriu în formă matriceală astfel
Figura 3.4

∂
∂
∂
∂∂
∂
∂
∂∂
∂
∂
∂∂
∂∂
∂∂
∂
=
γ
γ
γ
ε
ε
ε
w
v
u
x0
z
yz0
0xy
z00
0y
0
00x
zx
yz
xy
z
y
x
,
(3.15)
sau în formă condensată,
[ ] u∂=ε . (3.16)
RelaŃii de echilibru (Cauchy)
Dacă se consideră un element de volum dzdydx în interiorul unui corp (fig. 3.5), relaŃiile de echilibru sumă de momente pe cele trei axe, conduc la dualitatea tensiunilor tangenŃiale
xyyx τ=τ ; yzzy τ=τ ; zxxz τ=τ , (3.17)
relaŃii de care s-a Ńinut seama la definiŃia vectorului tensiunilor; iar sumă de forŃe pe cele trei axe, conduc la relaŃiile
0pzyx vxzxxyx =+
∂
τ∂+
∂
τ∂+
∂
σ∂;
0pzyx vyyzyxy
=+∂
τ∂+
∂
σ∂+
∂
τ∂;
0pzyx vz
zyzzx =+∂
σ∂+
∂
τ∂+
∂
τ∂,
(3.18)
care se rescriu, având în vedere definiŃiile precedente, în formă matriceală condensată
[ ] 0p vT
=+σ∂ . (3.19)
Figura 3.5 Figura 3.6

Dacă elementul de volum considerat, conŃine un contur al corpului (fig. 3.6), atunci relaŃiile de echilibru devin
zxxyxSx nmp τ+τ+σ= ℓ
yzyxySy nmp τ+σ+τ= ℓ
zyzzxSz nmp σ+τ+τ= ℓ
(3.20)
în care ℓ , m şi n reprezintă cosinusurile directoare ale normalei la contur, în raport cu sistemul global de axe.
RelaŃii constitutive ale materialului RelaŃiile dintre tensiuni şi deformaŃiile specifice corespunzătoare se obŃin pe cale experimentală pentru fiecare material în parte. FuncŃie de tipul materialului încercările experimentale prezintă anumite particularităti. Pentru unele tipuri de materiale, încercările sunt standardizate, şi în urma acestora se obŃin curbe caracteristice, coeficienŃi, constante de material etc. De regulă, aceste constante sunt dependente de o serie de factori cum ar fi: temperatura, dimensiunile şi forma epruvetei de încercare, calitatea suprafeŃelor, tehnologia de obŃinere a materialului, etc. Pentru unele materiale (în special metale) şi pentru solicitări care nu depăşesc anumite limite, între tensiuni şi deformaŃii specifice există o relaŃie cvasi liniară, de forma
[ ] σ=ε C , (3.21)
în care [C] este matricea de complianŃă a materialului, care se mai numeşte şi matricea coeficienŃilor de elasticitate.
Din relaŃia (3.21) rezultă
[ ] [ ] ε=ε=σ− DC 1 , (3.22)
în care [ ] [ ] 1CD −= este matricea de rigiditate a materialului care se mai numeşte şi matricea
proprietăŃilor materialului. Pentru un material anizotrop matricea de complianŃă [ ]C este simetrică şi conŃine 21 de constante
independente, adică
[ ]
=
66
5655
464544
36353433
2625242322
161514131211
C
CCSim
CCC
CCCC
CCCCC
CCCCCC
C .
(3.23)
Pentru un material ortotrop în coordonate carteziene, cu direcŃiile principale de-a lungul axelor, conform relaŃiilor generalizate ale lui Hooke, rezultă

[ ]
ν−
ν−
ν−
ν−
ν−
ν−
=
xz
yz
xy
zy
yz
x
xz
z
zy
yx
xy
z
zx
y
yx
x
G
100000
0G
10000
00G
1000
000E
1
EE
000EE
1
E
000EEE
1
C .
(3.24)
Din motive de simetrie există relaŃiile
x
xy
y
yx
EE
ν=
ν;
x
xz
z
zx
EE
ν=
ν;
y
yz
z
zy
EE
ν=
ν,
(3.25)
astfel încât din cele 12 constante de material, nouă sunt independente. Pentru un material izotrop, Ńinând seama de relaŃia dintre modulul de elasticitate longitudinal E,
transversal G şi coeficientul de contracŃie transversală ν , adică
( )ν+=
12
EG ,
(3.26)
rezultă
[ ]( )
( )
( )
ν+
ν+
ν+
ν−
ν−ν−
=
12
012Sim
0012
0001
0001
0001
E
1C ,
(3.27)
din care, prin inversare, rezultă matricea de rigiditate a materialului omogen, liniar şi izotrop
[ ]( )( )
ν−
ν−
ν−
ν−
νν−
ννν−
ν−ν+=
2
1
02
1Sim
002
10001
0001
0001
211
ED .
(3.28)
ObservaŃie! Pentru sistemul de referinŃă cilindric, utilizat pentru structurile axial simetrice, relaŃiile (3.24) - (3.28) au alte forme.

Expresii ale energiei
Lucrul mecanic. Lucrul mecanic este suma dintre produsul forŃelor şi deplasările produse pe direcŃiilae lor. În continuare, se are în vedere lucrul mecanic al forŃelor care produc deplasări elastice, deci se consideră că domeniul de analiză nu are deplasări de corp rigid. ForŃele aplicate unui element de volum dV, pot fi forŃe exterioare (forŃe de volum, forŃe de suprafaŃă sau forŃe echivalente concentrate) şi forŃe interioare (tensiuni), toate considerate constante.
Lucrul mecanic al forŃelor de volum, se scrie
dVpuW V
T
Ve ∫= , (3.29)
similar, lucrul mecanic al forŃelor de suprafaŃă, rezultă
dSpuW S
T
Se ∫= , (3.30)
iar lucrul mecanic al forŃelor concentrate este
i
T
iie FuW ∑= .
(3.31)
Energia potenŃială de deformaŃie. Un corp liniar elastic, acumulează o energie internă, exprimată
prin
dV2
1U
T
Vσε= ∫ .
(3.32)
Energia potenŃială a forŃelor exterioare. Această energie notată pW , se defineşte prin
ep WW −= . (3.33)
Dacă se consideră, drept forŃe exterioare, forŃele de volum şi forŃele de suprafaŃă, energia potenŃială a forŃelor exterioare se scrie
dSpudVpuW S
T
SV
T
Vp ∫∫ −−= . (3.34)
Tensiuni iniŃiale şi variaŃia de temperatură
Corpul supus analizei este obŃinut prin procedee tehnologice şi este supus unor tratamente termice sau mecanice care induc în material o distribuŃie de tensiuni iniŃiale, care se suprapun peste tensiunile mecanice produse de solicitări. PrezenŃa unor tensiuni iniŃiale este însoŃită de deformaŃiile corespunzătoare, dar este suficient să se cunoască una dintre ele dacă materialul are o comportare liniar elastică. Din cauza unor variaŃii de temperatură la care lucrează materialul, acesta se dilată dacă temperatura creşte sau se contractă dacă temperatura scade. De obicei se acceptă o temperatură iniŃială (de referinŃă) la care corpul nu prezintă influenŃe produse de temperatură. Dacă dilatarea este liberă, corpul îşi modifică dimensiunile (apare 0ε ) fără apariŃia unor tensiuni iniŃiale. Dacă dilatarea este total
împiedicată, atunci, corpul nu poate suferi deformaŃii, dar apar tensiuni iniŃiale termice 0σ . Dacă
dilatarea este parŃial împiedicată, atunci în corp apar atât deformaŃii specifice termice cât şi tensiuni termice. De obicei se face o distincŃie între deformaŃiile şi tensiunile termice şi cele mecanice, deoarece ele sunt însumate. În prezenŃa unor tensiuni iniŃiale 0σ şi a unor deformaŃii specifice iniŃiale 0ε , indiferent de
modul de producere, relaŃia (3.22) se rescrie sub forma

[ ] ( ) 00D σ+ε−ε=σ . (3.35)
DeformaŃiile specifice produse de dilatarea liberă a unui material ortotrop, sunt date de relaŃia
Tzyx0 000T ααα∆=ε (3.36)
în care xα , yα , zα sunt coeficienŃii de dilatare termică pe cele trei direcŃii principale, iar T∆ este
variaŃia de temperatură. Dacă în relaŃia (3.35) se consideră tensiunile iniŃiale 00 =σ şi deformaŃiile specifice mecanice
0=ε , efectul variaŃiei de temperatură pentru un corp cu dilatarea total împiedicată este
[ ] 0D ε−=σ (3.37)
Pentru un material omogen şi izotrop α=α=α=α zyx şi Ńinând seama de relaŃia (3.28) se obŃine
T0 000111
21
TE
ν−
∆α−=σ=σ .
(3.38)
ObservaŃie ! VariaŃia de temperatură produce modificări sesizabile ale constantelor elastice ale
materialului, ducând la probleme neliniare. De cele mai multe ori însă, pentru a lucra cu o singură valoare a constantelor de material, în special pentru variaŃii ale temperaturii apropiate de variaŃiile temperaturii mediului înconjurător (circa °± 50 ) se consideră valorile medii ale constantelor, în ipoteza că se cunoaşte temperatura iniŃială iT şi variaŃia ei T∆ . Astfel, pentru coeficientul de dilatare termică
al unui material izotrop, deoarece ( )Tα , în practică, de cele mai multe ori, se lucrează cu valoarea medie
∫∆+
α∆
=αTT
Tm
i
i
dTT
1.
(3.39)
Bibliografie
1. Cook R.D., Malkus D.S., Plesha M.E., Concepts and Applications of Finite Element Analysis,
John Wiley & Sons, University of Wisconsin-Madison, Third Edition, 1989.
2. Pascariu I., Elemente Finite. Concepte-AplicaŃii, Editura Militară, Bucureşti, 1985.

4.
ECUAłIILE DE MIŞCARE ÎN FORMĂ GENERALĂ. TIPURI DE ANALIZE ÎN MEF
Introducere
Metoda elementelor finite (MEF) s-a dezvoltat rapid, începând din anii ’60, odată cu dezvoltarea sistemelor de calcul. Deşi, teoretic, MEF este aproximativă, din punct de vedere ingineresc rezultatele obŃinute prin folosirea acestei metode sunt satisfăcătoare şi metoda s-a extins cu repeziciune şi în analiza dinamică.
MEF se bazează pe conceptul de “discretizare”, adică de divizare a domeniului de studiu în “elemente finite”. În lucrarea de faŃă se folosesc numai elemente finite de tip grindă şi bară articulată în combinaŃie cu elemente finite de tip masă concentrată şi elemente elastice discrete cu amortizare.
Modelul cu elemente finite este o idealizare a unei structuri reale de calcul şi se concretizează într-un număr finit de matrice şi vectori între care există relaŃii matematice care descriu fenomene fizice. Modelul cu elemente finite este un produs “dependent” de analistul care abordează o anumită problemă. Din acest motiv, în ultimul timp, pentru anumite structuri şi tipuri de probleme, există recomandări clare, în general bazate pe experienŃă, privind dezvoltarea modelelor de calcul cu elemente finite. Modelul matematic este cel care dictează “calitatea” soluŃiilor unor probleme şi deci generarea acestuia trebuie realizată de persoane cu experienŃă în utilizarea MEF.
Validarea unui model cu elemente finite pentru o structură reală se face de regulă pe baza rezultatelor experimentale. În general, modelul de calcul iniŃial, oricât de “fidel” ar fi realizat, nu corespunde în totalitate cu rezultatele obŃinute experimental şi este supus unui proces de corecŃie (“updating”), care însă nu face obiectul lucrării de faŃă. Mare parte din aplicaŃiile prezentate în acestă lucrare prezintă soluŃii analitice care sunt folosite la comentarea şi interpretarea rezultatelor obŃinute numeric.
Deşi în lucrare se punctează câteva aspecte generale în legătură cu dezvoltarea modelelor de calcul, obiectivul principal al acestei lucrări este de a parcurge principalele tipuri de analiză dinamică folosite în practică, de a identifica metodele cele mai eficiente de rezolvare şi a fi în măsură a interpreta corect rezultatele obŃinute. AplicaŃiile propuse şi rezolvate sunt alese astfel încât anumite aspecte, legate în special de reducerea modelelor de calcul, să nu fie necesare pentru a simplifica aparatul matematic şi a insista pe fenomenele fizice.
Impunerea condiŃiilor la limită, în deplasări şi forŃe, este o altă problemă importantă care trebuie avută în vedere nu numai pentru obŃinerea de rezultate corecte, ci şi în faza de alegere a tipurilor de elemente şi discretizare a modelului. Astfel, dacă modelul de calcul reprezintă o substructură, o atenŃie deosebită se acordă zonelor de interfaŃă cu alte substructuri.
Se cunoaşte că, discretizarea unui domeniu are implicaŃii asupra rezultatelor finale, şi, funcŃie de scopul calculului, de obicei în analiza statică, se adoptă o discretizare mai fină în zonele de interes, şi o discretizare mai puŃin fină în rest. În analiza dinamică se preferă, pentru

început, utilizarea discretizărilor uniforme, în special în problemele de propagare. Dacă se justifică practic, unele discretizări pot şi neuniforme.
EcuaŃia generală de mişcare a unei (sub)structuri
Folosind metoda elementelor finite pentru a modela o (sub)structură care urmează să fie analizată dinamic, în general, se parcurg următoarele etape: se aleg tipurile de elemente finite; se descrie geometria şi proprietăŃile materialelor; se discretizează modelul; se pun condiŃiile la limită; se calculează şi apoi se asamblează matricele de masă, rigiditate, amortizare (şi altele dacă e cazul), precum şi vectorul încărcărilor. În urma acestui proces rezultă ecuaŃiile de mişcare a (sub)structurii în coordonate fizice.
FuncŃie de sistemele modelate cu elemente finite şi de sistemele de referinŃă la care se raportează, ecuaŃiile de mişcare au forme diferite. Astfel, ecuaŃiile pentru structuri cu elemente în mişcare sunt dependente de sistemul de referinŃă, considerat fix sau mobil. Pentru un sistem, cu n grade de libertate, ecuaŃia de mişcare raportată la un sistem de referinŃă global fix este
[ ] [ ] [ ]( ) [ ] [ ] [ ]( ) iM u C G u K K C u Fσ+ + + + + =ɺɺ ɺ , (1.1)
în care [ ]M este matricea de masă, [ ]C este matricea de amortizare vâscoasă, [ ]G este
matricea giroscopică, [ ]K este matricea de rigiditate, [ ]Kσ este matricea de rigiditate
geometrică, [ ]iC este matricea de amortizare structurală, u este vectorul deplasărilor
nodale; uɺ este vectorul vitezelor nodale; uɺɺ este vectorul acceleraŃiilor nodale iar F este
vectorul încărcărilor nodale exterioare. Matricele din (1.1) pot fi constante sau dependente frecvenŃă, de vectorul deplasărilor nodale (răspuns) şi derivatele acestuia. Considerând ecuaŃia (1.1), un sistem se clasifică conform schemei prezentate în Tabelul 1.1.
Tabelul 1.1: Clasificarea sistemelor mecanice.
Negiroscopice [ ] [ ]0G = Conservative
[ ] [ ] [ ]0iC C= = Giroscopice [ ] [ ]0G ≠
Negiroscopice [ ] [ ]0G = Sisteme
Neconservative
[ ] [ ]0C ≠ ; [ ] [ ]0iC ≠ Giroscopice [ ] [ ]0G ≠
Tipuri de aplicaŃii în analiza dinamică
Analiza dinamică uzuală se face în ipoteza deplasărilor mici (vibraŃii liniar elastice), dar şi în domeniul deplasărilor de corp rigid. În MEF se disting două categorii esenŃiale de probleme în calculul dinamic:
-analiza modală;
-raspunsul dinamic.

Analiza modală este de obicei prima etapă de calcul a unei structuri şi poate conduce la informaŃii esenŃiale de comportare dinamică a structurii. Uneori aceasta analiză este o fază premergătoare a unei analize dinamice complexe.
Raspunsul dinamic la perturbaŃii cu deplasări iniŃiale, viteze iniŃiale sau forŃe perturbatoare, poate fi tratat, funcŃie de forma perturbaŃiei, în probleme de:
-analiză armonică;
-analiză tranzitorie;
-analiză spectrală.
Uneori, pentru a putea efectua o analiză dinamică, se impune şi efectuarea în prealabil a unei analize statice. Este cazul structurilor care lucrează pretensionat sau a căror geometrie iniŃială se modifică din cauza încărcărilor statice şi aceasta trebuie corectată.
Analiza statică este folosită pentru determinarea deplasărilor, tensiunilor, deformaŃiilor specifice, a eforturilor, etc, pentru modele de structuri în care se poate neglija efectul masei, altul decât forŃele de greutate sau de inerŃie staŃionară. Încărcările pot fi forŃe, presiuni, forte inerŃiale în regim stationar, deplasări impuse, deformaŃii generate de încărcări termice cunoscute. Analiza statică poate fi liniară sau neliniară. Analiza statică liniară constă în cel mai simplu calcul, din punct de vedere numeric se rezolvă un sistem de ecuaŃii algebrice liniare. Analizele neliniare se tratează folosind metode de rezolvare incrementale şi iterative (Newton-Raphson).
Analiza modală, în limbajul MEF, este folosită pentru determinarea frecvenŃelor şi formei modurilor proprii de vibraŃie pentru structuri sau componente de structuri. FrecvenŃele proprii şi modurile proprii sunt mărimi importante pentru proiectarea structurilor care lucrează în regim dinamic. Analiza modală este o faza obligatorie de calcul pentru analiza spectrală şi analiza armonică sau tranzitorie prin suprapunere de efecte. Analiza modală este considerată o analiză liniară, deşi problema de valori şi vectori proprii care trebuie rezolvată implică metode numerice iterative. Metodele de rezolvare a problemelor de valori şi vectori proprii care s-au impus în mod deosebit sunt: metoda Jacobi, metoda iteraŃiilor pe subspaŃii, metoda QR şi metoda vectorilor Lanczos. Efortul de calcul pentru rezolvarea unei probleme de valori şi vectori proprii este mult mai mare decât cel necesar unei analize statice liniare. Pentru modele cu multe grade de libertate, rezolvarea completă a problemei de valori şi vectori proprii nu este justificată practic deoarece informaŃia necesară în analiza structurală corespunde de regulă frecvenŃelor proprii de valori mici. Uneori, înainte de rezolvarea numerică efectivă, dimensiunea problemei iniŃiale se reduce la o dimensiune mult mai mică, care poate fi rezolvată cu uşurinŃă. Pentru reducerea dimensiunii se folosesc metode speciale de condensare dinamică (Irons-Guyan), sau metode de substructurare dinamică (Craig-Bampton sau Mac Neal).
Analiza armonică este o tehnică utilizată pentru determinarea răspunsului dinamic staŃionar al unei structuri cu comportare liniară, supusă unei încărcări particulare constând dintr-un set de forŃe (sau deplasări, viteze, acceleraŃii) cu variaŃie sinusoidală în timp, de aplitudine şi frecvenŃă cunoscute. Această tehnică permite calculul răspunsului staŃionar al unor vibraŃii întreŃinute (forŃate). Efectul tranzitoriu nu este luat în considerare şi toate încărcările trebuie să aibă aceeaşi frecvenŃă.
Analiza tranzitorie este utilizată pentru determinarea răspunsului dinamic al unei structuri încărcată cu orice sistem de forŃe dependent de timp. Acest tip de analiză poate fi utilizat pentru determinarea variaŃiei deplasărilor, tensiunilor, deformaŃiilor şi reacŃiunilor într-o structură ca urmare a unei încărcări oarecare ce poate fi descrisă cu uşurinŃă. Analiza se efectuează prin integrare numerică în timp, pas cu pas. Se pot include toate tipurile de neliniarităŃi (inclusiv amortizare) şi pentru un pas de calcul se ajunge la rezolvarea unui sistem de ecuaŃii liniare. Cele

mai folosite tehnici de integrare a ecuaŃiilor diferenŃiale ordinare sunt metodele de integrare implicite Wilson θ, Houboult, Newmark β [2].
Analiza spectrală, în MEF, este utilizată pentru determinarea deplasărilor, deformaŃiilor, reacŃiunilor şi tensiunilor întru-un model pentru care încărcarea se impune sub forma unui “spectru” cunoscut. Această analiză este liniară şi se bazează pe compunerea răspunsului modal obŃinut din analiza modală. Calculul spectral este o variantă simplificată de obŃinere a răspunsului maxim tranzitoriu pentru o încărcare aleatorie de genul şocurilor şi vibraŃiilor produse de cutremure, forŃa vîntului, valurile oceanelor, vibraŃia motoarelor etc. Din punctul de vedere al utilizatorului un spectru este o reprezentare grafică (de regulă obŃinută din prelucrări de înregistrări experimentale), a deplasărilor, vitezei, acceleraŃiei sau a forŃelor funcŃie de frecvenŃă. Analiza suportă diverse formulări spectrale: răspuns spectral pentru excitaŃie într-un punct, răspuns spectral pentru excitaŃie multipunct, răspuns spectral al densităŃii de putere şi altele. ExcitaŃiile pot fi pe una, două sau pe cele trei direcŃii ale sistemului de coordonate global. Se permit şi excitaŃii de rotire.
Analiza sistemelor rotor-lagăre este o extindere a calculului dinamic de la sistemele negiroscopice la sistemele giroscopice, în care mişcarea de rotaŃie corespunde unei singure axe. Programele consacrate, cum ar fi NASTRAN şi ANSYS, pot fi folosite şi în analiza dinamică a rotorilor graŃie unor programe de interfaŃă special concepute. Utilizând metoda elementelor finite, analiza dinamică a rotorilor se simplifică esenŃial, în comparaŃie cu abordarea clasică. Un rotor, izolat de stator, se consideră un ansamblu de arbori, discuri şi lagăre. Se consideră că rotorul în ansamblu se roteşte cu viteza unghiulară Ω. Programul prezentat în această carte a fost conceput să folosească la analize modale şi analize de răspuns la dezechilibre şi/sau forŃe exterioare armonice.
CunoştinŃe necesare unui utilizator al MEF
Un utilizator este pus în situaŃia rezolvării unei anumite probleme. El trebuie să afle dacă problema se pretează rezolvării cu MEF şi să folosească un program adecvat problemei respective. Pentru analiza aplicaŃiilor din această lucrare se pot folosi programele dezvoltate de autor sau oricare alte programe care se încadrează în categoria celor prezentate la fiecare capitol. Programele consacrate cum ar fi NASTRAN, ANSYS, ADINA, etc. pot fi utilizate fără probleme dar necesită o documentare suplimentară.
Odată stabilit programul de calcul este necesar a se face o informare asupra posibilitaŃii programului. Dacă performanŃele programului convin, după o documentare legată de modul de lucru al programului, se trece la pregătirea problemei pentru analiza cu MEF.
Trebuie menŃionat că programele de calcul folosite pentru analiza problemei nu abordează structura reală, ci doar un MODEL al ei pe care în general îl concepe utilizatorul. Rezultatele pot fi confirmate sau nu, funcŃie de cum a fost ales modelul de calcul. În lucrarea de faŃă, modelarea este o activitate de simplificare a structurii prin încadrarea diverselor porŃiuni ale structurii în categoria barelor, blocurilor rigide şi elementelor elastice tip arc, prin considerarea încărcărilor şi a rezemărilor etc. Modelarea corectă, cât mai aproape de realitate, este o problemă de experienŃă, inspiraŃie şi nu mai puŃin de cunoaştere a bazelor teoretice ale metodei elementelor finite precum şi a posibilităŃilor programelor de calcul.
Scopul acestei lucrări este de a scoate în evidenŃă unele aspecte practice ale modelării şi a noŃiunilor generale de lucru cu MEF astfel încât după parcurgerea acestei lucrări utilizatorul să poată utiliza orice program cu elemente finite care permite analize în regim dinamic.

CunoştinŃele necesare se dobândesc pe măsură ce utilizatorul rezolvă diverse probleme. Nu trebuie uitat faptul că pentru a rezolva corect o problemă este absolut necesar, nu şi suficient, de a introduce toate datele de intrare care definesc problema.
Programele concepute şi discutate în această lucrare permit introducerea datelor în mod interactiv (“programul întreabă - utilizatorul răspunde”) dar şi direct, în mod fişier, pentru reluarea unei probleme sau pentru cei care editează mai uşor un fişier pentru care se cunoaşte formatul datelor de intrare.
Programele de firmă respectă anumite reguli generale de introducere a datelor (notaŃii unificate, ordonarea comenzilor de pregătire a datelor, etc), ceea ce facilitează lucrul la programe diferite pentru utilizatori experimentaŃi. Pentru începători este indicat a se folosi un singur program de lucru.
În continuare se prezintă câteva aspecte comune tuturor programelor, în special a celor dezvoltate de autor, urmând a se reveni asupra noŃiunilor de bază pe care trebuie să le stăpânească un utilizator, în cadrul fiecărui capitol.
UnitaŃi de măsură
De obicei utilizatorul hotărăşte cu ce unităŃi de măsură lucrează dar trebuie avut în vedere că orice abatere de la SI (Sistemul InternaŃional al unităŃilor de măsură), atrage o atenŃie deosebită asupra unităŃilor de măsură adoptate. În acest sens trebuie respectate unităŃile de măsură iniŃial stabilite pentru absolut toate datele de intrare ale problemei. Rezultatele finale se vor regăsi în unităŃile stabilite de utilizator. Unele programe de calcul permit alegerea unitaŃilor de măsură atât pentru introducerea datelor cât şi pentru prezentarea rezultatelor.
Cele mai utilizate sisteme de unităŃi de măsură în modelarea sistemelor dinamice sunt prezentate în Tabelul 1.2.
În Ńara noastră se folosesc cu precădere sistemele SI (MKS) şi MPA pentru care se precizează şi unităŃile de măsură derivate în Tabelul 1.3. Sistemul µMKS se foloseşte de regulă în micro-electro-mecanică (MEMS).
Uneori se pot folosi şi alte sisteme de măsură derivate din SI, în care timpul se măsoară în ms sau µs, aceste sisteme pentru unităŃile de măsură trebuie judicios verificate deoarece frevenŃele se obŃin în kHz sau MHz.
Unele programe permit selectarea şi afişarea unităŃilor de măsură atât la introducerea datelor cât şi la prezentarea rezultatelor.
Tabelul 1.2: UnităŃi de măsură folosite în analiza dinamică.
Sistemul Denumirea şi unităŃile de măsură fundamentale
SI Sistemul internaŃional (m, kg, s, K)
MKS Sistemul MKS (m, kg, s, °C)
uMKS Sistemul µMKS (µm, kg, s, °C)
CGS Sistemul CGS (cm, g, s, °C)
MPA Sistemul MPA (mm, Mg, s, °C)
BFT Sistemul britanic cu lungimea în picioare (ft, slug, s, °F)

BIN Sistemul britanic cu lungimea în Ńoli (in, lbf·s2/in, s, °F)
Tabelul 1.3: Sisteme de uniŃăŃi de măsură coerente utilizate în ingineria mecanică.
Mărime mecanică SI (MKS) MPA µMKS
Lungime m mm µm
Unghi rad rad rad
Fortă N N µN
Timp s s s
FrecvenŃă Hz Hz Hz
Masă kg Mg = t (tonă) kg
Presiune Pa MPa MPa
Viteză m/s mm/s µm/s
Viteză unghiulară rad/s rad/s rad/s
AcceleraŃie m/s2 mm/s2 µm/s2
AcceleraŃie unghiulară rad/s2 rad/s2 rad/s2
Densitate kg/m3 t/mm3 kg/µm3
Tensiune Pa MPa MPa
Modul de elasticitate Pa MPa MPa
Putere W mW pW
Sisteme de axe
Se menŃionează că toate programele cu elemente finite tratează modelul într-un sistem de
axe global (OXYZ). Acest sistem de axe este un sistem cartezian drept şi în general modelul se poziŃionează în sistemul global de axe conform dorinŃelor utilizatorului cu excepŃia cazului în care programul este conceput într-un sistem de axe particular cum ar fi cele de analiză a rotorilor şi a probleme plane, când sistemul de axe este plan (XOY).
NotaŃii uzuale
Pe măsură ce s-au dezvoltat noi programe cu elemente finite, au apărut noŃiuni noi de lucru dar o parte a denumirilor şi notaŃiilor nu s-au modificat. NotaŃiile utilizate în această carte sunt inspirate dintr-o serie de programe consacrate cum ar fi SAP, ANSYS, NASTRAN. Lista notaŃiilor din programele prezentate în capitolele următoare este prezentată la începutul cărŃii, într-un paragraf separat.
Pentru un model de structură 3D, un nod are şase grade de libertate, adică trei translaŃii în lungul axelor X, Y, Z şi trei rotaŃii în jurul aceloraşi axe. Gradele de libertate translaŃii se notează de obicei cu UX, UY, UZ iar gradele de libertate rotaŃii se notează cu RX, RY, RZ. Dacă unele grade de libertate sunt fixate, adică prezintă deplasări sau rotiri nule, atunci acestea se numesc blocaje. În această situaŃie pot exista blocaje la translaŃie pe cele trei direcŃii: BX, BY, BZ şi

blocaje la rotaŃie: BXX, BYY, BZZ. ConvenŃional se atribuie unui grad de libertate valoarea 0
dacă este “liber” şi valoarea 1 dacă este “blocat”.
Ordonând gradele de libertate, adică UX, UY, UZ, RX, RY, RZ, o referire la blocaje, sau la componentele forŃelor, etc, se poate face cu un cod numeric, din componenŃa căruia fac parte cifrele de la 1 la 6. Varianta completă nu poate depăşi şase caractere, adică 123456. Pentru blocaje, apariŃia în cod a unei cifre de la 1 la 6 precizează blocaj pe direcŃia respectivă, de exemplu 134 semnifică BX=1; BZ=1 şi BXX=1.
Declararea elementelor se face notând nodurile sale începând cu: I, J şi K, depinde de câte noduri defineşte elementul.
Tipuri de materiale
Toate programele prezentate în această lucrare utilizează modele de materiale liniar elastice izotrope. Materialele izotrope se caracterizează prin trei constante de material E, G, ν între care există relaŃia de legătură:
2(1 )
EG
ν=
+. (1.2)
De obicei în practică se declară E -modulul de elasticitate longitudinal şi ν -coeficientul de contracŃie transversală. Pentru analiza în regim dinamic pentru fiecare material utilizat trebuie să se precizeze şi ρ -densitatea. Se precizează că densitatea trebuie introdusă în unităŃi de măsură coerente, conform Tabelului 1.3, altfel se pot produce greşeli, în special de cei care lucrează de regulă aplicaŃii în regim static pentru care se folosesc unităŃi de măsură MPA.
Analiza modală
Prin neglijarea amortizărilor, a efectului giroscopic şi a forŃelor aplicate structurii, altele decât cele statice de pretensionare, care se includ prin matricea de rigiditate geometrică
[ ]Kσ , ecuaŃia de mişcare (1.1) se transformă în ecuaŃia de mişcare a vibraŃiilor libere
[ ] [ ] [ ]( ) 0M u K K uσ+ + =ɺɺ . (2.1)
Matricea de rigiditate geometrică [ ]Kσ este inclusă în ecuaŃia de mai sus în urma unei
analize statice, deoarece această matrice depinde de eforturile axiale din barele structurii [7] şi contribuie la modificarea frecvenŃelor de vibraŃie. Exemplul cel mai simplu, care poate introduce acest efect, este modificarea frecvenŃelor de vibraŃie a corzilor de chitară, atunci când acestea sunt întinse sau slăbite. Pentru structurile neîncărcate static, această matrice este nulă.
Matricele de masă [ ]M şi rigiditate [ ]K sunt simetrice şi constante. În ecuaŃia (2.1) se
consideră condiŃiile la limită în deplasări nule impuse, iar dimensiunea matricelor este n n× .
SoluŃia ecuaŃiei (2.1) se “alege” de forma
i tu e
ωφ= , (2.2)
în care φ este vectorul modal care defineşte forma modală, independent de timp, ω este
pulsaŃia proprie, iar t variabila timp. Prin derivarea ecuaŃiei (2.2) se obŃine expresia vitezei

i tu i e
ωω φ=ɺ , (2.3)
care printr-o nouă derivare conduce la expresia acceleraŃiei
2 i tu e
ωω φ= −ɺɺ . (2.4)
Prin introducerea ecuaŃiilor (2.2) şi (2.4) în (2.1), rezultă problema generalizată de valori şi vectori proprii
[ ] [ ]( ) [ ] φωφσ MKK 2=+ . (2.5)
Se precizează că matricea de masă a structurii [ ]M , funcŃie de formularea la nivelul
elementelor finite, poate să fie coerentă, adică matricea de masă se determină utilizând funcŃiile de interpolare statice, sau diagonală, adică matricea de masă se formează “intuitiv” sau se diagonalizează conform unor proceduri [7].
Problema generalizată de valori şi vectori proprii de mai sus, prezintă n perechi de
valori ( 2j jλ ω= ) şi vectori proprii jφ . Vectorii proprii sunt definiŃi doar ca formă, raportul
componentelor unui vector propriu este constant şi de cele mai multe ori ei se normează în raport cu matricea de masă astfel încât
[ ] 1T
j jMφ φ = ; 1, ,j n= … . (2.6)
Uneori vectorii proprii se normează fără a Ńine seama de matricea de masă. Programul de faŃă permite, prin utilizarea variabilei TipNorm, normarea modurilor de vibraŃie în normă euclidiană unitate, adică pentru fiecare mod propriu j, componentele acestuia
ijφ satisfac
relaŃia
2
1
1n
ij
i
φ=
=∑ , (2.7)
sau valoarea absolută maximă a componentelor vectorului modal j să fie egală cu unitatea, adică
( )1, ,
max 1iji n
φ=
=…
. (2.8)
Problema de valori şi vectori proprii (2.5) se poate rezolva folosind o serie de algoritmi
consacraŃi cum ar fi metoda Jacobi dacă matricea [ ] [ ]( )K Kσ+ este pozitiv definită, adică
structura nu prezintă mişcari de corp rigid sau mecanism şi eforturile de compresiune, dacă există, nu produc pierderea stabilităŃii elastice a structurii. O posibilitate de a înlătura aceste limitări se poate obŃine prin transformarea problemei generalizate de valori şi vectori proprii într-o problemă simplă de valori şi vectori proprii, adică de forma [ ] A x xλ= , care se poate
rezolva folosind algoritmul QR. Acesta nu prezintă restricŃii la matricea cu numere reale [ ]A ,
mai mult, soluŃiile pot fi complexe dacă e cazul. Deoarece matricea de masă este întotdeauna nesingulară, relaŃia (2.5) se poate rescrie în forma echivalentă
[ ] [ ] [ ]( ) φωφσ21
=+−
KKM . (2.9)
După rezolvarea problemei de valori şi vectori proprii (2.9), pulsaŃiile şi vectorii proprii corespunzători se ordonează astfel încât
2 2 2 21 2 3 nω ω ω ω≤ ≤ ≤ ≤⋯ . (2.10)

FrecvenŃele proprii, măsurate în Hertz, rezultă din
π
ω
2i
if = . (2.11)
Se insistă a preciza că modul propriu de vibraŃie este definit de pulsaŃia proprie (sau frecvenŃa proprie) şi vectorul modal corespunzător. Vectorul modal este descris de mărimi
relative care definesc forma modului propriu, nu şi valoarea amplitudinii de vibraŃie care este o mărime care depinde de excitaŃie. FuncŃie de tipul de normare, valorile vectorilor proprii diferă numai printr-un factor de scalare, adică, din punct de vedere matematic, există o singură constantă nedeterminată pentru fiecare mod propriu.
O structură care prezintă mişcări de corp rigid sau mecanism are un număr de frecvenŃe proprii nule corespunzătoare acestor forme modale. Pentru aceste situaŃii, din considerente numerice, frecvenŃele modurilor de corp rigid şi mecanism rezultă foarte apropiate de zero, uneori chiar negative, dar aproape niciodată nule. Valori negative se pot obŃine şi pentru structuri fără mişcări de corp rigid sau mecanism atunci când structura este solicitată la compresiune peste limita de stabilitate structurală. ConvenŃional, pentru această situaŃie, programul listează frecvenŃa proprie definită de (2.11), negativă.
Efortul de calcul pentru a rezolva complet o problemă de valori şi vectori proprii creşte considerabil cu numărul de grade de libertate active n. Deoarece în practică interesează de regulă numai modurile proprii corespunzătoare frecvenŃelor proprii joase (de valori mici), programele cu elemente finite consacrate rezolvă problema de valori şi vectori proprii numai pentru cele mai mici valori proprii, sau dintr-o bandă precizată, folosind metoda iteraŃiilor pe subspaŃii sau metoda vectorilor Lanczos [2, 15].
Cea mai mică frecvenŃă proprie pozitivă este numită fundamentală. Dacă structura prezintă simetrii, este posibil a se obŃine o serie de frecvenŃe proprii coincidente. Se poate arăta, că pentru frecvenŃe proprii coincidente, formele vectorilor proprii corespunzători sunt combinaŃii liniare ale unor forme modale considerate “pure” şi care practic sunt foarte greu de extras pe cale numerică.

5.
MATRICELE DE RIGIDITATE ALE ELEMENTELOR FINITE UZUALE – SOLID BRICK, ÎNVELIŞ SHELL ŞI BARE BEAM
Elementul hexaedral cu opt noduri (BRICK8)
A. Caracteristici principale ale elementului BRICK8 (Fig. 12.1): 1. este element izoparametric, definit de opt noduri I, J, K, L, M, N, O, P care trebuie declarate în sensul precizat în Fig. 12.1.a; 2. are trei grade de libertate pe nod (GLN = 3), deplasări pe direcŃiile X, Y şi Z (UX, UY, UZ); 3. are forma unui hexaedru oarecare şi poate fi încărcat cu forŃe la noduri;
a b
Fig. 12.1: Elementul BRICK8 4. elementul se poate folosi pentru modelarea stării 3D de tensiune pentru materiale izotrope şi orice domeniu de analiză, adică acest element poate fi considerat unul dintre cele mai generale tipuri de elemente finite. Cu ajutorul acestui element finit se pot analiza toate componentele unei structuri, fie ele bare, plăci sau blocuri. Totuşi, din considerente ale dimensiunilor foarte mari ale modelelor cu elemente finite, acest element finit se foloseşte cu precădere pentru modelarea stucturilor considerate blocuri (adică prezintă cele trei dimensiuni geometrice comparabile); 5. matricea de rigiditate în coordonate globale este:
[ ] [ ][ ]Te
VK B D B dV = ∫ , (12.1)
în care: [ ] [ ][ ]B N= ∂ ; (12.2)
este matricea derivatelor funcŃiilor de formă, iar expresia matricelor de derivare este:
[ ] ⋅
∂
∂
∂
∂∂
∂
∂
∂∂
∂
∂
∂∂
∂∂
∂∂
∂
=∂
x0
z
yz0
0xy
z00
0y
0
00x
(12.3)

FuncŃiile de formă în coordonate naturale sunt:
( )( )( )
( )( )( )
( )( )( )
( )( )( )t1s1r18
1N
t1s1r18
1N
t1s1r18
1N
t1s1r18
1N
4
3
2
1
−+−=
−++=
−−+=
−−−=
( )( )( )
( )( )( )
( )( )( )
( )( )( )t1s1r18
1N
t1s1r18
1N
t1s1r18
1N
t1s1r18
1N
8
7
6
5
++−=
+++=
+−+=
+−−=
(12.4a)
( )( )( )( )( )( )t1t1N
s1s1N
r1r1N
11
10
9
+−=
+−=
+−=
(12.4b)
matricea de rigiditate (elasticitate) a materialului [D] este
[ ]( )( )
−
−
−
−
−
−
−+=
ν2
1
0ν2
1tricmeSi
00ν2
1000ν1
000νν1
000ννν1
ν21ν1
ED (12.5)
6. uzual elementul este denumit BRICK8.
B. Date legate de element 1. tipul elementului finit, adică pentru obŃinerea matricei de rigiditate se pot folosi funcŃiile de formă (12.4a), sau, pentru creşterea preciziei, se pot folosi şi funcŃiile de formă (12.4b), caz în care înainte de asamblare matricea de rigiditate a elementului se “condensează” la gradele de libertate corespunzătoare celor opt noduri; 2. ordinul de integrare al matricei de rigiditate al elementului, INT (pentru programe de firmă se alege automat 2, 3 sau 4); C. Date despre materialul elementului 1. modulul de elasticitate longitudinal - E; 2. coeficientul lui Poisson - niu; (3). coeficientul de dilatare termică - α; (4). densitatea materialului -DENS; (5). acceleraŃia gravitatională - g sau greutatea specifică - γ = ρg. D. Date despre încărcări 1. blocaje la translaŃie în direcŃia X – BX, şi în direcŃia Y – BY şi în direcŃia Z - BZ; 2. forŃe la noduri în direcŃia X – FX, Y - FY şi Z - FZ; (3). deplasări impuse pe orice direcŃie; (4). temperaturi în noduri sau în elemente; (5). forŃe de inerŃie generate de câmpul gravitaŃional (pentru care sunt necesare ca date de intrare ρ, g direcŃia şi sensul gravitaŃiei), sau generate de mişcarea de rotaŃie uniformă (pentru care trebuie precizate axa de rotaŃie şi viteza unghiulară ω);

(6) presiuni distribuite liniar sau constante pe feŃele elementului, care se identifică prin numere de la 1 la 6 (vezi Fig. 12.1.a). Aceste presiuni (sau forŃe distribuite liniar) se echivalează la nodurile elementului cu forŃe concentrate (vezi Fig. 8.2 pentru care se neglijează momentele); E. Rezultatele analizei 1. deplasările nodale - UX, UY şi UZ (notate şi DX, DY şi DZ); 2. tensiunile în sistemul global de axe - SX, SY, SZ, SXY SYZ, SXZ, adică tensorul complet al tensiunilor la nodurile elementului, precum şi în centrul lui, tensiunile principale S1, S2, S3 şi unghiurile corespunzătoare de orientare (vezi Fig. 12.1.b, în care s-au figurat doar tensiunile normale). Tensiunile într-un nod comun mai multor elemente nu rezultă egale. Pentru corectarea rezultatelor, de obicei, se recurge la medierea tensiunilor în noduri folosind diverse metode, cea mai simplă mediere fără a Ńine seama de volumele elementelor vecine este inclusă în programul de calcul (vezi relaŃia 9.16.a). Tensiunile dintr-un punct P al elementului se determină cu relaŃia:
[ ][ ] eP UBD
SXZ
SYZ
SXY
SZ
SY
SX
=
. (12.6)
Se menŃionează că pentru calculul tensiunilor în general se foloseşte altă tehnică: tensiunile se determină în punctele Gauss 222 ×× (unde se demonstrează că erorile de calcul a tensiunilor sunt minime) şi apoi acestea se expandează la noduri folosind funcŃiile de formă 12.4a. Pentru elemente hexaedrice puŃin distorsionate, adică apropiate de un cub, practic tensiunile determinate direct în noduri coincid cu cele expandate din punctele Gauss. DiferenŃe mai mari apar pentru elementele finite care folosesc funcŃii de formă suplimentare (12.4b). Programul dispune de alegerea modului în care se calculează tensiunile pe elemente. Tensiunile principale în noduri se pot calcula odată cu calculul tensiunilor în elemente sau tensiunile componente ale tensorului tensiune se pot media la noduri şi apoi se pot calcula tensiunile principale S1 > S2 > S3 în noduri. Programul mediază tensiunile componente şi apoi calculează tensiunile principale. Tensiunea echivalenta, von Mises - Sech se determina cu relatia (9.18.) (3). deformaŃiile specifice din element, într-un punct P se calculeaza cu relaŃia:
[ ] eP UBε = (12.7)
(4). reactiunile din legaturile cu exteriorul. 1. Date generale despre discretizare NN NE 2. Date despre materiale NMAT MATI E niu ... 3. Date despre proprietăŃile elementelor NPROP PROPI TIPE INT ... 4. Date despre noduri NI BX BY BZ X Y Z ... 5. Date despre elemente EI I J K L M N O P MAT PROP

... 6. Date despre încărcări cu forŃe în noduri NF NIF FX FY FZ ... G. Programul de lucru BRICK8.EXE Acest program a fost conceput să lucreze cu noŃiunile (datele) de la punctele B-E neincluse între paranteze. Elementul shell cu opt noduri (SHELL8)
A. Caracteristici principale ale elementului SHELL8 (Fig. 13.1): 1. este definit de opt noduri I, J, K, L, M, N, O, P care trebuie declarate conform figurii 13.1 şi prezintă o formulare izoparametrică; 2. are şase grade de libertate pe nod (GLN = 6), deplasări pe direcŃiile X, Y şi Z (UX, UY, UZ) şi rotiri în jurul axelor X, Y, Z (RotX, RotY, RotZ) aşa cum se prezintă în figura 13.2; 3. are forma unui patrulater plan oarecare - conŃinut în planul xy al sistemului de referinŃă local – legat de element, are grosimea constantă t, laturile pot fi drepte sau curbe. Elementul poate fi încărcat cu forŃe şi momente în noduri – raportate la sistemul de referinŃă global XYZ, precum şi cu presiuni normale pe cele şase feŃe marcate cu 1-6.
Fig. 13.1: Elementul SHELL8
Fig. 13.2: Gradele de libertate şi încărcările nodale ale elementului SHELL8
Presiunile se consideră pozitive dacă “intră” în element. Formularea teoretică a elementului consideră suprafaŃa mediană (“Middle surface”) perfect plană, deci abaterile de la planeitate introduc erori în formularea matricei de rigiditate. FaŃa pozitivă (obŃinută prin regula şurubului drept aplicată numerotării I – J – K - L) poartă denumirea de faŃă superioară sau “Top” iar faŃa negativă poartă denumirea de faŃă inferioară sau “Bottom”; 4. elementul se poate folosi pentru modelarea învelişurilor şi plăcilor de grosime constantă pe porŃiuni, adică din componenŃa unor structuri preponderent realizate din table, considerate materiale izotrope;

5. matricea de rigiditate în coordonate locale se obŃine prin suprapunerea matricei de rigiditate de membrană cu matricea de rigiditate de placă (încovoiere) ca în figura 13.3. Se menŃionează că formularea matricei de rigiditate membrană nu conŃine gradele de libertate zϕ (“drilling” = de sfredelire) acestea fiind introduse într-un mod aproximativ prin intermediul matricei [kt]. Matricea de rigiditate a elementului în coordonate locale se poate scrie simbolic
[ ]
[ ] [ ] [ ]
[ ] [ ] [ ]
[ ] [ ] [ ]
=
×××
×××
×××
××
yi
xi
i
zi
i
i
p
t
m
w
v
u
k
k
k
uk
ϕ
ϕ
ϕ
24248241624
24888168
24168161616
1484848
00
00
00
, (13.1)
în care T
i uuuu 821 ⋯= ş.a.m.d. sunt gradele de libertate nodale în sistemul de referinŃă local xyz.
Element Membrană + Element Placă = Element Shell
Fig. 13.3: Formarea elementului plan Shell8
Cele trei matrice nenule din (13.1) se obŃin din relaŃiile:
[ ] [ ] [ ][ ]∫=V
mm
T
mm dVBDBk , (13.2)
[ ]
=
1
1
1
1
1
1
1
1
βββββββ
βββββββ
βββββββ
βββββββ
βββββββ
βββββββ
βββββββ
βββββββ
αEVkt, (13.3)
[ ] [ ] [ ][ ]∫=V
pp
T
pp dVBDBk , (13.4)
în care [ ]mB şi [ ]pB se obŃin prin derivarea funcŃilor de formă, având în vedere aproximaŃiile câmpului
deplasărilor. [ ]mD şi [ ]pD sunt matricele de rigiditate ale materialului, prezentate mai jos, iar E este
modulul de elasticitate longitudinal, V este volumul elementului finit, 7
1−=β , iar coeficientul α s-a ales
0,003. Matricea [ ]tk a fost aleasă astfel încât să înlăture singularitatea matricei [ ]k şi să poată reprezenta
mişcările de corp rigid relativ la gradele de libertate rotiri normale la elementul finit. FuncŃiile de formă sunt definite în coordonate naturale ξ şi η:
( ) ( ) ( )η+ξ+η−ξ−−= 1114
1N1 ; ( )( )η−ξ−= 11
2
1N 2
5 ;
( ) ( ) ( )η+ξ−η−ξ+−= 1114
1N2 ; ( ) ( )2
6 112
1N η−ξ+= ;
(13.5)

( ) ( ) ( )η−ξ−η+ξ+−= 1114
1N3 ; ( )( )η+ξ−= 11
2
1N 2
7 ;
( ) ( ) ( )η−ξ+η+ξ−−= 1114
1N4 ; ( ) ( )2
8 112
1N η−ξ−= .
Matricele de rigiditate (elasticitate) ale materialului sunt
[ ]
−−=
2
100
01
01
1 2 νν
ν
ν
EDm
; [ ]
=
κ
κ
ν
ν
G
GG
EE
EE
Dp
0000
0000
0000
000
000
, (13.6)
în care ( )ν+
=12E
G este modulul de elasticitate transversal al materialului; ν este coeficientul lui
Poisson iar
+=
2252,01;2,1max
t
Aκ este un coeficient de corecŃie pentru distribuŃia parabolică a
tensiunilor de forfecare care se consideră constantă pe grosimea elementului; A este aria elementului finit. Aproximarea câmpului deplasărilor în interiorul elementelor finite pentru deplasările de membrană, respectiv placă se face cu relaŃiile:
=
∑= i
i
i i
i
v
u
N
N
v
u 8
1 0
0;
−=
∑=
yi
xi
i
i
i
i
i w
N
zN
zN
w
v
u
ϕ
ϕ8
1 00
00
00
. (13.7)
Deoarece funcŃiile de formă sunt definite în coordonate naturale, derivarea în raport cu coordonatele x şi y implică folosirea derivatelor funcŃiilor compuse şi deci calculul inversei Jacobianului [J]. Dacă se folosesc notaŃiile
[ ]
=
∗∗
∗∗−
2221
12111
JJ
JJJ ;
∂
∂+
∂
∂=
∂
∂+
∂
∂=
∗∗
∗∗
ηξ
ηξ
iii
iii
NJ
NJb
NJ
NJa
2221
1211
, (13.8)
atunci matricele derivatelor funcŃiilor de formă rezultă din
[ ] 116163
8
1
0
0
××=
=
=
= ∑ mm
i
i
i
ii
i
i
xy
y
x
m dBv
u
ab
b
a
γ
ε
ε
ε ; (13.9a)
[ ] 124245
8
1
0
0
0
00
00
××=
=
−
−
−
=
= ∑ pp
yi
xi
i
i
ii
ii
ii
i
i
xz
yz
xy
y
x
p dB
w
Na
Nb
zbza
zb
za
ϕ
ϕ
γ
γ
γ
ε
ε
ε , (13.9b)
în care md şi pd sunt componentele vectorilor deplasare în coordonate locale.
Integralele (13.2) şi (13.4) se transformă în integrale de suprafaŃă deoarece integrarea pe direcŃia z (grosimea plăcii) se face fără dificultăŃi analitic. Totuşi integralele de suprafaŃă în coordonate naturale se efectuează numeric folosind integrarea Gauss-Legendre în minim 2× 2 puncte Gauss.

Odată cunoscută matricea de rigiditate în coordonate locale se poate determina matricea de rigiditate a elementului în coordonate globale folosind relaŃia de transformare
[ ] [ ] [ ] [ ]4848484848484848 ××××
= TkTKTe , (13.10)
în care matricea de transformare [ ]T este funcŃie de matricea [ ]λ a cosinusurilor directoare dintre cele două sisteme de referinŃă local-global
[ ] [ ] 16,,2,1 …== idiagT λ ;
=
333
222
111
][
nml
nml
nml
λ (13.11)
6. în această lucrare elementul este denumit SHELL8 deşi în unele programe de firmă formulările, respectiv denumirea poate fi alta.
B. Date legate de element 1. grosimea elementului finit t, pentru un element Shell în alte dezvoltări şi implementări este posibil a defini grosimi diferite în cele patru noduri I, J, K, L; 2. ordinul de integrare pentru calculul numeric al matricei de rigiditate cu cele două componente membrană şi placă, INTM şi INTP care de regulă se aleg 2, (pentru programe de firmă se alege automat 2 sau 3 sau se recurge la tehnici speciale de integrare); C. Date despre materialul elementului 1. modulul de elasticitate longitudinal - E; 2. coeficientul lui Poisson - niu; (3). coeficientul de dilatare termică - α; (4). densitatea materialului -DENS; (5). acceleraŃia gravitatională - g sau greutatea specifică - γ = ρg. D. Date despre încărcări 1. deplasări şi rotiri impuse nule în sistemul global de coordonate (sau blocaje) la translaŃie BX, BY, BZ şi rotaŃie BXX, BYY, BZZ; 2. forŃe la noduri în direcŃia X – FX, Y - FY şi Z – FZ precum şi momente în jurul axelor X – MX, Y – MY, Z – MZ; 3. presiuni distribuite liniar (biliniar) sau constante pe feŃele elementului, care se identifică prin numere de la 1 la 6 (vezi Fig. 13.1). Aceste presiuni se echivalează numeric la nodurile elementului cu forŃe concentrate conform relaŃiei
[ ] dApNFT
A
e ∫= . (13.12)
Se menŃionează că această echivalare (coerentă funcŃiilor de formă) conduce la ditribuŃii de forŃe nodale care aparent par “bizare”. Spre exemplu echivalarea unor presiuni constante pe un element dreptunghiular se prezintă în Fig. 13.4; (4). deplasări impuse pe orice direcŃie; (5). temperaturi în noduri sau în elemente; (6). forŃe de inerŃie generate de mişcarea accelerată (sau câmpul gravitaŃional g), pentru care sunt necesare ca date de intrare ρ, g direcŃia şi sensul acceleraŃiei, sau generate de mişcarea de rotaŃie uniformă, pentru care trebuie precizate axa de rotaŃie şi viteza unghiulară ω;

Fig. 13.4: Echivalarea presiunilor pe un element Shell8 dreptunghiular
E. Rezultatele analizei 1. deplasările nodale - UX, UY, UZ (notate uneori DX, DY şi DZ) şi rotirile RX, RY, RZ (notate şi RotX, RotY, RotZ); 2. tensiunile în sistemul global de axe - SX, SY, SZ, SXY SYZ, SXZ, adică tensorul complet al tensiunilor la nodurile elementului, precum şi în centrul lui pentru feŃele Top, Middle şi Bottom, tensiunile principale S1, S2, S3 şi unghiurile corespunzătoare de orientare – cosinusurile directoare. Tensiunile într-un nod comun mai multor elemente nu rezultă egale. Pentru corectarea rezultatelor, de obicei, se recurge la medierea tensiunilor în noduri folosind diverse metode, cea mai simplă mediere fără a Ńine seama de volumele elementelor vecine este inclusă în programul de calcul (vezi relaŃia 9.16.a). Tensiunile dintr-un punct oarecare (de coordonate ξ , η şi z) al elementului se determină mai întâi în sistemul de coordonate local pentru cele două componente de membrană şi placă (vezi Fig. 13.5) cu relaŃiile:
[ ] mm
T
xyyxm D ετσσσ == ; (13.13a)
[ ] pp
T
xzyzxyyxp D ετττσσσ == , (13.13a)
în care mε şi pε se determină cu relaŃiile (13.9) în care vectorii deplasărilor nodale în coordonate
locale md şi pd se obŃin prin transformarea deplasărilor globale (care sunt obŃinute prin rezolvarea
sistemului de ecuaŃii) în deplasări locale [ ] ee UTu = . Vectorii md şi pd sunt componente ale
vectorului eu .
a) Tensiuni de membrană b) Tensiuni de “placă”
Fig. 13.5: Componentele tensiunilor locale ( în sistemul de referinŃă al elementului) pentru elementul SHELL8
obŃinute conform formulării teoretice Tensiunile totale în coordonate locale se obŃin prin suprapunere de efecte, adică pm σσσ +=
în care adunarea se face pe componente. De obicei tensiunile se calculează într-un număr limitat de puncte

(nodurile elementului şi centrul său) alese de pe feŃele “Top”, “Middle” şi “Bottom”. Se observă că din calcul tensiunile
zσ sunt nule, iar pentru corecŃie în faza de postprocesare programul atribuie pz −=σ pe faŃa în care există presiune aplicată cu variaŃie liniară la zero pe faŃa opusă dar numai pentru feŃele 1 şi 2. Tensiunile locale dintr-un punct sunt transformate în tensiuni globale (în sistemul de referinŃă global) folosind relaŃia
+++
+++
+++=
xz
yz
xy
z
y
x
T
nnnmnmmmnnmm
nnnmnmmmnnmm
nnnmnmmmnnmm
nnmmnm
nnmmnm
nnmmnm
SXZ
SYZ
SXY
SZ
SY
SX
τ
τ
τ
σ
σ
σ
311331133113131313
233223322332323232
122112211221212121
33333323
23
23
22222222
22
22
11111121
21
21
222
222
222
ℓℓℓℓℓℓ
ℓℓℓℓℓℓ
ℓℓℓℓℓℓ
ℓℓℓ
ℓℓℓ
ℓℓℓ
(13.14)
Pentru creşterea preciziei tensiunile se determină de regulă în punctele Gauss 22 × (unde valorile sunt cel mai bine estimate) şi apoi acestea se expandează la noduri folosind funcŃiile de formă 9.14. Programul dispune de alegerea modului în care se calculează tensiunile pe elemente: direct în nodurile elementului sau în punctele Gauss din care mai apoi tensiunile se expandează la noduri. Tensiunile principale în noduri se pot calcula odată cu calculul tensiunilor în elemente sau tensiunile componente ale tensorului tensiune se pot media la noduri şi apoi se pot calcula tensiunile principale S1 > S2 > S3 în noduri. Programul mediază tensiunile componente şi apoi calculează tensiunile principale. Tensiunea echivalenta, von Mises - Sech se determina cu relatia (9.18.) (3). deformaŃiile specifice din element în coordonate locale, într-un punct oarecare se calculeaza cu relaŃiile (13.9) şi apoi se pot transforma similar tensiunilor, dar programul sare această etapă pentru a reduce volumul rezultatelor. (4). reactiunile din legaturile cu exteriorul. F. Structura fişierului cu date de intrare este: 1. Date generale despre discretizare NN NE 2. Date despre materiale NMAT MATI E niu ... 3. Date despre proprietăŃile elementelor NPROP PROPI t INTM INTP ... 4. Date despre noduri NI BX BY BZ BXX BYY BZZ X Y Z ... 5. Date despre elemente EI I J K L M N O P MAT PROP ... 6. Date despre încărcări cu forŃe în noduri NF NIF FX FY FZ MX MY MZ ... 7. Date despre încărcări cu presiuni pe elemente NEP EIP FATA P1 P2 P3 P4 ...

G. Programul de lucru SHELL8w_re.EXE Acest program a fost conceput să lucreze cu noŃiunile (datele) de la punctele B-E neincluse între paranteze.
Elementul finit “Beam3D”
Se consideră un element finit de tip grindă, de secŃiune oarecare, dar constantă pe lungime (Fig. 1.1). Acesta este definit de două noduri de capăt I şi J în care se introduc cele şase componente ale deplasărilor (deplasări şi rotiri) drept grade de libertate şi un nod de orientare K, care precizează direcŃia principală a secŃiunii y. Axa barei x, este definită de la nodul I la nodul J, iar axa principală z a secŃiunii se obŃine considerând sistemul de referinŃă cartezian drept. Celor şase grade de libertate din fiecare nod, ordonate UX, UY, UZ, RX, RY şi RZ le corespund forŃele şi momentele nodale FX, FY, FZ, MX, MY şi MZ. În sistemul de referinŃă local xyz se definesc eforturile la nivelul elementului N, Ty, Tz, Mt, My şi Mz, pozitive atunci când respectă sensurile din Fig. 1.1.
Elementul finit grindă are contribuŃii la ecuaŃia de mişcare a structurii în matricea de rigiditate şi de masă. Formularea generală a elementului, pentru calculul matricei de rigiditate corespunde grinzii Timoshenko, dar poate fi redusă şi la formularea Euler-Bernoulli, prin intermediul parametrului TipK.
Pentru fiecare element de tip grindă, se precizează, prin intermediul unui set de proprietăŃi asociat secŃiunii respective, aria secŃiunii A (A), momentele de inerŃie principale
yI = Iy şi
zI = Iz şi momentul
convenŃional la răsucire t
I = It precum şi coeficienŃii de forfecare y
φ = Fiy şi z
φ = Fiz. Coeficientul de
forfecare este definit ca raportul dintre aria totală şi aria de forfecare, deci are valori supraunitare spre deosebire de inversul lui – factorul de forfecare, care este subunitar. Din coordonatele nodurilor I şi J rezultă lungimea L, iar dacă se Ńine seama şi de coordonatele nodului K se determină complet orientarea barei în spaŃiu. Din materialul atribuit elementului de grindă rezultă modulul de elasticitate longitudinal E, coeficientul lui Poisson ν şi densitatea ρ.
Fig. 1.1: Elementul finit “Beam3D”.

Matricea de rigiditate a elementului în formularea Timoshenko (cu includerea efectului forŃei tăietoare în calculul deplasărilor), în sistemul de referinŃă local [28], este
1 5 1 5
2 6 2 6
6 3 6 7
5 4 5 8
1 5 1 5
2 6 2 6
6 7 6 3
5 8
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0
N N
T T
e
B
N N
T T
v v
v v v v
v v v v
v v
v v v v
v v v vk
v v
v v v v
v v v v
v v
v v v v
v v
−
−
− − −
−
−
− = −
− − −
−
−
−
5 40 0 0v v
−
, (1.2)
în care
( )1 3
12
1z
y
EIv
Lκ=
+;
( )2 3
12
1y
z
EIv
Lκ=
+;
( )( )3
4
1z y
z
EIv
L
κ
κ
+=
+;
( )( )4
4
1
y z
y
EIv
L
κ
κ
+=
+;
( )5 2
6
1z
y
EIv
Lκ=
+;
( )6 2
6
1y
z
EIv
Lκ=
+;
( )( )7
2
1z y
z
EIv
L
κ
κ
−=
+;
( )( )8
2
1
y z
y
EIv
L
κ
κ
−=
+; N
EAv
L= ; t
T
GIv
L=
2
12 y z
y
EI
GAL
φκ = ;
2
12 z y
z
EI
GAL
φκ = şi
( )2 1
EG
ν=
+.
Dacă se consideră formularea Euler-Bernoulli (TipK = 1), atunci se consideră 0y zκ κ= = , sau
echivalent yφ = 0 şi z
φ = 0.
Matricea de masă prezintă două formulări care se identifică prin parametrul TipM. Pentru formularea matrice de masă diagonală (TipM = 1), în coordonate locale, se consideră
[ ]( )1 1 1 2 3 3 1 1 1 2 3 3diage
Bm v v v v v v v v v v v v = , (1.3)
în care 1 2
ALv
ρ= ; 2 2
tLIv
ρ= ;
3
3 24
ALv
ρ= .
Dacă matricea de masă este coerentă cu funcŃiile de formă statice (TipM = 2), atunci în programele de faŃă se consideră 0== zy κκ şi rezultă

1 2 3 4
5 6 7 8
6 9 8 10
2 11 4 12
3 4 1 2
7 8 5 6
8 10 6 9
4
0 0 0 0 0 2 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 2 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
2 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 2 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0
N N
T T
e
B
N N
T T
v v
v v v v
v v v v
v v
v v v v
v v v vm
v v
v v v v
v v v v
v v
v v v v
v
−
− − −
− − =
− −
−
−
12 2 110 0 0 0v v v
− −
, (1.4)
în care
3N
ALv
ρ= ;
3t
T
LIv
ρ= ; 1 2
613
35 5zI
v ALAL
ρ
= +
; 2
11
210 10zIL
v ALAL
ρ
= +
; 3 2
69
70 5zI
v ALAL
ρ
= −
;
4
613
420 10zIL
v ALAL
ρ
= − +
; 5 2
613
35 5yI
v ALAL
ρ
= +
; 6
11
210 10yIL
v ALAL
ρ
= +
; 7 2
69
70 5yI
v ALAL
ρ
= −
;
8
613
420 10yIL
v ALAL
ρ
= −
; 2
9
2
105 15yIL
v ALA
ρ
= +
; 2
10 140 30yIL
v ALA
ρ
= +
; 2
11
2
105 15zIL
v ALA
ρ
= +
;
2
12 140 30zIL
v ALA
ρ
= +
.
Transformarea matricelor în sistemul de referinŃă global se face cu relaŃiile de transformare
T
e e e e
B BK T k T = ; T
e e e e
B BM T m T = , (1.5)
în care matricea de transformare eT conŃine cosinusurile directoare ℓ , m, n ale unghiurilor formate de
axele de coordonate ale celor două sisteme de referinŃă local-global (vezi Fig. 1.1), aranjate astfel:
Axele X Y Z
x 1ℓ 1m 1n
y 2ℓ 2m 2n
z 3ℓ 3m 3n
Dacă matricea cosinusurilor directoare, numită şi matricea de rotaŃie, se notează
[ ]1 1 1
2 2 2
3 3 3
m n
m n
m n
λ
=
ℓ
ℓ
ℓ
, (1.6)
atunci matricea de transformare devine
[ ] [ ] [ ] [ ]( )diageT λ λ λ λ = . (1.7)

6.
MATRICELE DE MASĂ ALE ELEMENTELOR FINITE UZUALE ŞI CONSIDERAłII PRIVIND INTRODUCEREA AMORTIZĂRII
Elementul finit “Masa3D”
Se consideră un element finit de tip masă concentrată într-un punct, pentru care direcŃiile principale ale momentelor de inerŃie masice coincid cu sistemul de referinŃă global (Fig. 1.2). Elementul se consideră ataşat modelului într-un nod I. Acesta are contribuŃii în ecuaŃia de mişcare (1.1) numai în matricea de masă, şi eventual, indirect, în matricea de amortizare vâscoasă, prin amortizarea de tip Rayleigh. Mărimile necesare pentru a defini complet un element finit de tip masă concentrată sunt: masa m (M) şi momentele de inerŃie masice principale JX = Jx, JY = Jy şi respectiv JZ = Jz. Pentru un solid care se încadrează în ipotezele simplificatoare de mai sus, adică solidul se consideră rigid şi direcŃiile principale ale momentelor de inerŃie masice corespund sistemului de referinŃă global, aceste mărimi se determină cu relaŃiile [4, 17]
∫ ρ=V
dVm ;
( )∫ +=V
X dVzyJ ρ22 ;
( )∫ +=V
Y dVzxJ ρ22 ;
( )∫ +=V
Z dVyxJ ρ22 .
(1.8)
Fig. 1.2: Elementul finit “Masa3D”.
Se menŃionează că momentele de inerŃie masice centrifugale, fată de sistemul de axe principal
∫=V
XY dVxyJ ρ ; ∫=V
YZ dVyzJ ρ ; ∫=V
XZ dVxzJ ρ , (1.9)
sunt nule.

Pentru câteva solide de formă particulară, expresiile de calcul ale maselor şi momentelor de inerŃie masice se prezintă în Tabelul 1.4.
Matricea de masă a elementului în coordonate globale este diagonală
[ ]
=
Z
Y
X
e
M
J
J
J
m
m
m
M
00000
00000
00000
00000
00000
00000
. (1.10)
Tabelul 1.4: Caracteristici inerŃiale ale unor solide de formă particulară.
Corpul PoziŃia axelor şi notaŃiile
geometrice RelaŃii de calcul
Cilindru (disc) cu gaură
( )2 2e i
m t R Rπρ= −
( )2 21
2X i eJ m R R= +
( )2 2 213
12Y Z i eJ J m R R t = = + +
Bilă plină
34
3m Rπ=
22
5X Y ZJ J J mR= = =
Paralelipiped dreptunghic plin
m abcρ=
( )2 21
12XJ m b c= +
( )2 21
12YJ m a c= +
( )2 21
12ZJ m a b= +

Tor plin
2 22m Rrρ π=
( )2 214 5
8X YJ J m R r= = +
2 23
4ZJ m R r
= +
1.5.3. Elementul finit “Arc3D”
Legăturile slabe dintre elementele unei structuri sau dintre structura modelată şi elementele de legătură cu exteriorul, se echivalează prin introducerea unor forŃe şi momente nodale care lucrează asupra modelului. Aceste forŃe se consideră că au o componentă elastică dată de matricea de rigiditate şi o componentă disipativă dată de matricea de amortizare vâscoasă. În programele de faŃă se consideră două variante de elemente elastice discrete numite în continuare “Arc3D_L” şi “Arc3D_G”.
Prima variantă corespunde unui element elastic cu amortizare vâscoasă care lucrează între două noduri de coordonate diferite şi este definit în sistemul de referinŃă local al elementului.
Varianta a doua este definită direct în sistemul de referinŃă global şi cele două noduri între care se defineşte elementul pot fi coincidente. Această situaŃie este întâlnită la îmbinările cu articulaŃie cilindrică şi sferică pentru care se poate modela rigiditatea şi amortizarea îmbinărilor.
Elementul Arc3D_L
Cele două matrice de rigiditate şi amortizare sunt definite iniŃial în sistemul de referinŃă local, legat de elementul finit. Elementul finit se consideră generat de două noduri necoincidente I şi J între care există numai o componentă de forŃă axială şi una de moment de răsucire (Fig. 1.3).

Fig. 1.3: Elementul finit tip “Arc3D_L”.
Din cauza transformărilor de coordonate, în sistemul de referinŃă global elementul are şase componente ale deplasărilor (deplasări şi rotiri) drept grade de libertate nodale. Celor şase grade de libertate din fiecare nod, ordonate UX, UY, UZ, RX, RY şi RZ le corespund forŃele şi momentele nodale FX, FY, FZ, MX, MY şi MZ. În sistemul de referinŃă local xyz se pot defini eforturile, pozitive dacă respectă sensurile precizate în Fig. 1.3.
Pentru definirea completă a elementului finit trebuie precizate constantele de rigiditate axială tk
[N/m] şi de răsucire r
k [Nm/rad], precum şi coeficienŃii de amortizare vâscoasă la translaŃie t
c [Ns/m] şi
la răsucire rc [Nms/rad].
Orientarea elementului se obŃine din coordonatele nodurilor de capăt I şi J. Se observă că nu este nevoie de un nod de orientare deoarece eforturile sunt orientate în lungul axei x.
Spre deosebire de elementul Beam3D, care are tot 12 grade de libertate, şi pentru care matricea de rigiditate este de rang 6 (se pot reprezenta cele şase mişcări de corp rigid), elementul Arc3D_L, pentru care 0
tk ≠ şi 0
rk ≠ are rangul 10, deci pe lângă cele 6 mişcări de corp rigid există şi 4 mişcări de
mecanism. Dacă acest element se foloseşte pentru modele în care unele grade de libertate nu sunt preluate de elementele vecine şi nu sunt blocate atunci pot apare mişcări nedorite de mecanism, deci trebuie acordată o atenŃie deosebită în folosirea lor eficientă.
Legarea elementelor în serie, fără un element de masă intermediar, poate conduce la grade de libertate fără masă ataşată, deci la matrice de masă singulară pentru care analiza dinamică nu este posibilă fără o serie de corecŃii numerice care nu sunt incluse în programele prezentate în această lucrare.
Matricele de rigiditate şi amortizare în coordonate locale sunt:
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
t t
r r
e
A
t t
r r
k k
k k
kk k
k k
−
− = − −
; (1.11)

0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
t t
r r
e
A
t t
r r
c c
c c
cc c
c c
−
− = − −
. (1.12)
Transformarea matricelor în sistemul de referinŃă global se face cu relaŃiile T
e e e e
A AK T k T = ; T
e e e e
A AC T c T = , (1.13)
în care matricea de transformare eT este definită de relaŃia (1.7) iar matricea de rotaŃie (1.6) conŃine
cosinusurile directoare ale unghiurilor formate de axele de coordonate ale celor două sisteme de referinŃă local-global. Se observă că numai axa locală ox este unic definită axele oy şi oz pot avea orice poziŃie în planul perpendicular pe axa ox.
Elementul Arc3D_G
Cele două matrice de rigiditate şi amortizare sunt definite direct în sistemul de referinŃă global. Elementul finit se consideră generat de două noduri I şi J care pot fi coincidente şi între care există toate componentele eforturilor, decuplate între ele (Fig. 1.3). În sistemul de referinŃă global elementul are şase componente ale deplasărilor (deplasări şi rotiri) drept grade de libertate. Celor şase grade de libertate din fiecare nod, ordonate UX, UY, UZ, RX, RY şi RZ le corespund forŃele şi momentele nodale FX, FY, FZ, MX, MY şi MZ. ProprietăŃile elementului se definesc prin şase constante elastice şi şase coeficienŃi de amortizare corespunzător fiecărui grad de libertate. Trebuie precizate constantele de rigiditate axială (faŃă de cele trei axe ale sistemului de referinŃă global)
xk , yk şi
zk [N/m] şi constantele de rigiditate la
răsucire xxk , yyk şi zzk [Nm/rad], precum şi coeficienŃii de amortizare vâscoasă la translaŃie xc , yc şi zc
[Ns/m] şi la răsucire xx
c , yyc zz
c [Nms/rad].
Elementul Arc3D_G, pentru care toate constantele elastice sunt nenule are rangul 6, deci nu există mişcări de mecanism în element.
Elementul se poate utiliza pentru modelarea condiŃiilor de margine, adică rezemări elastice cu amortizare vâscoasă, a interacŃiunii elastice şi/sau cu amortizare între componentele unui sistem, etc.
La limită, dacă toate constantele de rigiditate pentru un element de tip Arc3D_G tind către infinit, adică au valori mari în raport cu restul elementelor finite dintr-un model, atunci elementul se comportă ca un rigid sau o legătură rigidă. Dacă rigidităŃile la răsucire sunt nule şi cele axiale infinite, pentru noduri coincidente, se modelează o articulaŃie sferică. Dacă două dintre rigidităŃile la răsucire şi cele trei axiale sunt infinite, pentru noduri coincidente, se modelează o articulaŃie cilindrică.

Fig. 1.4: Elementul finit tip “Arc3D_G”.
Matricele de rigiditate şi amortizare în coordonate globale sunt:
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
x x
y y
z z
xx xx
yy yy
zz zze
A
x x
y y
z z
xx xx
yy yy
zz zz
k k
k k
k k
k k
k k
k kK
k k
k k
k k
k k
k k
k k
−
−
−
−
−
− = −
−
−
−
−
−
; (1.14)
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
x x
y y
z z
xx xx
yy yy
zz zze
A
x x
y y
z z
xx xx
yy yy
zz zz
c c
c c
c c
c c
c c
c cC
c c
c c
c c
c c
c c
c c
−
−
−
−
−
− = −
−
−
−
−
−
. (1.15)

1.6. Caracteristici inerŃiale ale modelelor cu elemente finite
DistribuŃia de masă în modelul cu elemente finite este esenŃială pentru obŃinerea unui model dinamic fidel structurii analizate. Elementele finite, în cazul de faŃă elementele de tip Beam şi Masa, contribuie cu masă distribuită şi concentrată la masa modelului cu elemente finite.
Se poate considera că fiecare element finit, raportat la sistemul de referinŃă global, este un element discret de coordonate Xi, Yi şi Zi, caracterizat de o masă proprie mi şi o matrice de inerŃie simetrică (Fig. 1.5), care conŃine momentele de inerŃie masice (mecanice) axiale şi centrifugale
[ ]
−−
−−
−−
=
iZiZYiZX
iYZiYiYX
iXZiXYiX
i
JJJ
JJJ
JJJ
J
,,,
,,,
,,,
. (1.16)
Pentru elementul Beam momentele de inerŃie masice în coordonate locale (adică în sistemul de referinŃă principal al elementului), se obŃin din relaŃiile de definiŃie (1.8) şi (1.9), rezultă astfel
LAmi ρ= ;
( )zyix IILJ += ρ, ; 12
2
,
LmILJ i
yiy += ρ ; 12
2
,
LmILJ i
ziz += ρ ;
0, =ixyJ ; 0, =iyzJ ; 0, =ixzJ .
(1.17)
PoziŃia centrului de masă al elementului se determină din coordonatele nodale, adică
2I J
i
X XX
+= ;
2I J
i
Y YY
+= ;
2I J
i
Z ZZ
+= . (1.18)
Fig. 1.5: Aspecte inerŃiale pentru o structură discretă, din bare şi mase concentrate.

Dacă matricea de inerŃie a unui element Beam în coordonate locale se notează
, , ,
, , ,
, , ,
x i xy i xz i
i xy i y i yz i
xz i yz i z i
J J J
J J J J
J J J
− −
= − − − −
ℓ , (1.19)
atunci matricea de inerŃie a elementului în coordonate globale rezultă [4]
[ ] [ ] [ ]T
i iJ Jλ λ = ℓ , (1.20)
în care [ ]λ este matricea cosinusurilor directoare (1.6) dintre cele două sisteme de referinŃă.
Pentru elementul de tip Masa, momentele de inerŃie, inclusiv masa, sunt date de intrare direct în coordonate globale.
Un model cu elemente finite poate fi verificat înainte de a efectua o analiză şi prin compararea caracteristicilor inerŃiale cu cele ale structurii pe care o reprezintă. În continuare se prezintă modul în care aceste proprietăŃi de inerŃie pot fi calculate folosind discretizarea modelului. De regulă fineŃea discretizării nu influenŃează sesizabil rezultatul – caracteristicile inerŃiale ale modelului, dar propietăŃile elementelor, precum şi datele de material, au o influenŃă esenŃială în rezultatul final. Din acest motiv se recomandă verificarea modelului cu elemente finite înainte de efectuarea analizelor dinamice şi din punct de vedere al poziŃiei centrului de greutate, al masei totale şi a momentelor de inerŃie mecanice. Programele folosite în această lucrare calculează şi afişează aceste mărimi înainte de a începe rezolvarea propriu-zisă.
Masa totală a modelului cu elemente finite şi poziŃia centrului de masă rezultă din relaŃiile:
∑= imM ; M
XmX
ii
G
∑= ;
M
YmY
ii
G
∑= ;
M
ZmZ
ii
G
∑= , (1.21)
în care suma se efectuează pentru toate elementele finite care includ masă.
Momentele de inerŃie axiale ale modelului, faŃă de sistemul de referinŃă global, se obŃin din relaŃiile [17]
( )( )∑ ++= 22, iiiiXX ZYmJJ ;
( )( )∑ ++= 22, iiiiYY ZXmJJ ;
( )( )∑ ++= 22, iiiiZZ YXmJJ .
(1.22)
Momentele de inerŃie centrifugale ale modelului, faŃă de sistemul de referinŃă global se obŃin din relaŃiile
( ),XY XY i i i iJ J m X Y= +∑ ;
( ),YZ YZ i i i iJ J mY Z= +∑ ;
( ),XZ XZ i i i iJ J m X Z= +∑ .
(1.23)
Momentele de inerŃie ale modelului faŃă de sistemul de referinŃă central – sistemul de referinŃă global cu originea în centrul de greutate al modelului, se obŃin folosind teorema Huygens-Steiner [17], adică

( )22, GGXGX ZYMJJ +−= ; ,XY G XY G GJ J M X Y= − ;
( )22, GGYGY ZXMJJ +−= ; ,YZ G YZ G GJ J M Y Z= − ;
( )22, GGZGZ YXMJJ +−= ; ,XZ G XZ G GJ J M X Z= − .
(1.24)
Din aceste valori formează matricea de inerŃie faŃă de sistemul de referinŃă central, care este listată şi de programele de calcul în forma
[ ], , ,
, , ,
, , ,
X G XY G XZ G
G XY G Y G YZ G
XZ G YZ G Z G
J J J
J J J J
J J J
− −
= − − − −
. (1.25)
Sistemul de referinŃă principal al proprietăŃilor inerŃiale – pentru care matricea de inerŃie are formă diagonală
[ ]
=
3
2
1
0
00
00
00
J
J
J
J , (1.26)
se obŃine din rezolvarea problemei de valori şi vectori proprii
[ ] xxJG λ= . (1.27)
Valorile proprii reprezintă momentele de inerŃie principale, ordonate descrescător 1 2 3J J J≥ ≥ , iar
vectorii proprii, de normă euclidiană unitate, sunt cosinusurile directoare ale direcŃiilor principale faŃă de sistemul de referinŃă global.
Matricea de amortizare
Există relativ puŃine tipuri de elemente finite care generează o matrice de amortizare. Aceasta, de obicei, se defineşte pentru un element unidimensional de amortizare vâscoasă.
În analiza structurală pentru sisteme neconservative şi negiroscopice s-au introdus şi alte reprezentări ale efectului de disipare a energiei [7, 8, 32, 38, 39]. De regulă se consideră reprezentări obŃinute din determinări experimentale, care conduc la o formulare matematică simplificată a ecuaŃiei de mişcare. În continuare se face o scurtă trecere în revistă a acestor reprezentări. Pentru început se discută cazul sistemului cu un singur grad de libertate deoarece acesta este mult mai simplu şi uneori ecuaŃiile de mişcare se pot decupla folosind coordonatele modale.
Pentru un sistem cu un grad de libertate şi amortizare vâscoasă, forŃa disipativă (de amortizare), se presupune proporŃională cu viteza, asfel ecuaŃia de mişcare se scrie
extmu cu ku f+ + =ɺɺ ɺ , (1.28)
în care coeficientul de amortizare vâscoasă c este constant. Este mai comod însă a se lucra cu o amortizare relativă, exprimată prin raportul de amortizare (sau fracŃiunea din amortizarea critică) ζ ,
definit ca raport dintre coeficientul c şi coeficientul critic crc , care marchează trecerea din regim

oscilatoriu în regim aperiodic, pentru o încărcare treaptă sau impuls. Expresia raportului de amortizare este [32]
km
c
c
c
cr 2==ζ . (1.29)
Există însă materiale, cum ar fi de exemplu cauciucul, pentru care în regim armonic, rigiditatea poate fi determinată experimental şi se exprimă în complex ( )1k iη+ , în care η este coeficientul de
amortizare structurală (histeretică). Dacă această amortizare se introduce în ecuaŃia (1.28), termenul c poartă numele de amortizare vâscoasă echivalentă şi rezultă
kc
η
ω= , (1.30)
unde ω este pulsaŃia forŃei exterioare. Trebuie reŃinut că această formă de amortizare este validă doar pentru solicitări armonice.
DiferenŃa esenŃială dintre amortizarea vâscoasă şi cea histeretică, constă în faptul că energia disipată pe un ciclu, depinde liniar de frecvenŃa de oscilaŃie, pentru amortizarea vâscoasă şi este independentă de frecvenŃă, în cazul amortizării histeretice.
În cazul elementelor finite, ecuatia generală (1.1) pentru sisteme negiroscopice este similară ecuaŃiei (1.28), pentru un grad de libertate, în care matricea de amortizare, în cel mai general caz, se formează din [7, 8]:
-amortizarea proporŃională (Rayleigh), introdusă artificial din necesităŃi de decuplare a ecuaŃiilor diferenŃiale;
-amortizarea histeretică, independentă de frecvenŃa de lucru, dependentă de matricea de rigiditate globală sau de rigiditatea fiecarui material în parte;
-amortizarea generată de diverse tipuri de elemente finite, cum ar fi elementele de tip Arc3D;
-amortizarea modală, introdusă din considerente practice, de folosire a datelor experimentale.
Dacă se Ńine seama de toate formele amortizării precizate mai sus, în MEF matricea de amortizare, considerată proporŃională cu viteza, devine
[ ] [ ] ( )[ ] [ ]1 1
NMAT NE
c j j k
j k
C M K K C Cζα β β β= =
= + + + + + ∑ ∑ , (1.31)
în care: α şi β sunt coeficienŃii constanŃi Rayleigh; c
β este un coeficient variabil cu frecvenŃa,
capabil de a introduce amortizarea histeretică; jβ , jK şi NMAT reprezintă coeficientul de
amortizare al materialului j, porŃiunea din matricea de rigiditate generată de elementele din materialul j, şi respectiv numărul total de materiale diferite care participă la formarea matricei de rigiditate; [ ]kC
este matricea de amortizare a elementului k, iar NE este numarul total de elemente finite; Cζ este o
matrice de amortizare dependentă de frecvenŃă, exprimată indirect prin intermediul raportului de amortizare modală ζ , adică
2T
i i iCζφ φ ω ζ = , (1.32)
în care iφ este modul propriu de vibraŃie i, iar iω este pulsaŃia proprie neamortizată corespunzătoare
modului i.
RelaŃia (1.31) ia forme particulare, funcŃie de tipul de analiză adoptat, şi este precizată separat în cadrul fiecărui program folosit în acestă lucrare.

7.
AVANTAJELE, DEZAVANTAJELE ŞI LIMITELE METODEI ELEMENTELOR FINITE
În prezent metoda elementelor finite (MEF) este aproape generalizată în proiectarea inginerească asistată şi are aplicabilităŃi masive în cercetarea mecanică, transmisia căldurii, electricitate, hidraulică, biomecanică etc.
Avantajele MEF Propagarea “masivă”, într-un interval de timp relativ scurt, a MEF se explică în primul rând prin avantajele sale, dintre care cele mai importante sunt: Genaralitatea. MEF este o metodă numerică aproximativă de calcul care se poate utiliza pentru rezolvarea problemelor de mecanica structurilor deformabile, mecanica fluidelor, transmisia căldurii, electromagnetism, electrostatică, biomecanică etc. Solicitările pot fi statice, dinamice, periodice, staŃionare, nestaŃionare, tranzitorii etc. Problemele pot fi liniare, neliniare (cu diverse tipuri de neliniarităŃi), dependente de timp, probleme de stabilitate, de vibraŃii, de interacŃiune etc. În prezent utilizarea MEF este limitată doar de lipsa de imaginaŃie şi ingeniozitate a potenŃialilor beneficiari. SupleŃea. Pentru abordarea unei anumite probleme concrete cu MEF, nu există nici un fel de restricŃii care să decurgă din metodă, adică elaborarea modelului de calcul al problemei date se poate face cu o libertate deplină, în care esenŃiale sunt fantezia, ingeniozitatea şi experienŃa utilizatorului. SupleŃea MEF asigură elaborarea cu foarte mare uşurinŃă a modelului de calcul şi permite automatizarea acestui proces într-o foarte mare măsură. După ce s-a realizat modelul şi s-au făcut diverse calcule cu el, într-un număr de variante privind solicitările, condiŃiile de rezemare, opŃiunile de analiză etc., se pot obŃine variante noi, îmbunătaŃite, ale modelului iniŃial, astfel încât să fie satisfăcute cât mai deplin diversele exigenŃe ale utilizatorului. Simplitatea conceptelor de bază. Pentru utilizarea MEF nu este necesar ca utilizatorul să aibă cunoştinŃe speciale de matematică sau informatică, ci este suficient ca el să fie un bun inginer, adică să aibă cunostinŃe temeinice inginereşti uzuale. Se pot întelege şi asimila, cu un efort minim, conceptele de bază ale MEF şi anume: nod, element finit, reŃea de discretizare, structură, model de calcul.
Acest atribut al MEF face ca ea să fie accesibilă unui număr foarte mare de utilizatori. Utilizarea calculatoarelor. Din chiar principiile de bază ale MEF, rezultă necesitatea efectuării unui volum foarte mare (uneori chiar uriaş) de calcule numerice, ceea ce impune implementarea metodei pe calculatoare numerice. Se constată cu uşurinŃă că de fapt dezvoltarea MEF şi a programelor care folosesc metoda s-au realizat în strânsă concordanŃă cu creşterea performanŃelor sistemelor de calcul. Această situaŃie de fapt are consecinŃe practice importante privind automatizarea şi fiabilitatea proceselor componente ale MEF şi FEA. ExistenŃa programelor de calcul cu MEF. În prezent se comercializează şi sunt accesibile numeroase programe de calcul cu MEF, deosebit de performante. Aceste programe permit analiza oricărei structuri mecanice, cu o complexitate practic nelimitată în ceea ce priveşte forma geometrică, dimensiunile, solicitările, variantele de analiză etc. Se poate afirma că, în prezent, se poate calcula orice structură mecanică cu MEF. FacilităŃi de pre şi postprocesare. MEF permite ca relativ simplu să se realizeze o mare diversitate de proceduri eficiente de preprocesare a modelului de calcul în vederea reducerii volumului de muncă,

în special a discretizării automate şi a verificării acestuia. Rezultatele obŃinute în urma procesării modelului - care au de obicei un volum uriaş - pot fi prezentate sub formă de tabele, listinguri, desene, diagrame, animaŃii, alb-negru sau color etc., astfel încât informaŃiile oferite beneficiarului să fie cât mai accesibile, sugestive, atractive, complete, precise etc. Stabilitatea algoritmilor de calcul. Eforturile a numeroşi cercetători (matematicieni şi ingineri) s-au concretizat prin elaborarea unor algoritmi şi proceduri eficiente şi sigure informatice şi matematice de calcul, destinate MEF şi FEA, care s-au verificat, s-au impus şi au fost unanim acceptate. În aceste condiŃii, MEF şi programele corespunzătoare elaborate oferă stabilitate şi siguranŃă utilizatorilor. Variante noi ale programelor includ fie extinderi ale bibliotecilor de elemente finite sau ale opŃiunilor de calcul implementate, fie noi facilităŃi de pre şi postprocesare.
Dezavantajele MEF Prin extinderea până aproape de generalizare a MEF şi FEA, precum şi prin numărul uriaş de utilizatori entuziaşti ai acestora, nu înseamnă că MEF a ajuns panaceu universal în calculele efectuate în inginerie şi în cercetare. Metoda are dezavantaje şi limite. Cele mai importante dezavantaje ale MEF sunt: Metoda este aproximativă. Analiza cu MEF nu se face pentru structura reală ci pentru un model (de calcul) al acesteia şi rezultatele obŃinute reprezintă o aproximare a stărilor de deplasări, tensiuni, temperaturi etc. din structura reală care se analizează. Dezavantajul MEF constă în aceea că nu se poate estima - în marea majoritate a situaŃiilor reale - cu un nivel de încredere cuantificabil, cât de bine aproximeză FEA soluŃia exactă (necunoscută) a problemei care se analizează. Altfel spus este foarte dificil - uneori chiar imposibil – să se estimeze care sunt abaterile valorilor mărimilor (deplasări, tensiuni, eforturi, frecvenŃe etc.) calculate cu MEF faŃă de cele reale, necunoscute. Modelul de calcul este subiectiv şi arbitrar. Utilizatorul are libertate deplină în elaborarea modelului, MEF neavând restricŃii în acest sens. SupleŃea metodei duce la suspiciuni în legatură cu corectitudinea modelului şi a eficienŃei analizei realizate cu el. În aceste condiŃii hotărâtoare sunt curajul, ingeniozitatea şi experienŃa utilizatorului în domeniul MEF şi FEA, atribute subiective şi greu de evaluat cantitativ. Elaborarea unui model de calcul performant devine astfel o artă. Din acest motiv, diverse institute de proiectare sau firme, au emis norme şi reguli de elaborare a modelelor pentru unele categorii de structuri, unele dintre acestea fiind validate în practică. Elaborarea modelului de calcul este laborioasă. Pentru realizarea modelului cu elemente finite al unei structuri este necesar din partea utilizatorului un efort considerabil şi o foarte bună cunoaştere a modului de preprocesare al programului cu elemente finite sau a interfeŃei CAD – MEF. Programele MEF sunt complexe şi scumpe. În dorinŃa de a satisface cât mai bine exigenŃele utilizatorilor şi de a face faŃă concurenŃei, firmele care elaborează programe performante pentru analize cu elemente finite au realizat produse de o foarte mare complexitate. Pentru utilizarea corectă şi eficientă a acestora li se cer utilizatorilor eforturi deosebite, pentru lungi perioade de timp. PreŃurile programelor sunt relativ mari, uneori chiar prohibitive.
Limitele MEF şi FEA Cele mai importante limite ale metodei şi analizelor cu elemente finite sunt următoarele: Precizia rezultatelor. În principiu MEF este convergentă şi soluŃia unei probleme se poate apropia oricât de mult de soluŃia exactă (necunoscută), dar nu o poate atinge (decât rareori şi numai pentru structuri foarte simple) şi nici nu se pot preciza abaterile dintre cele două soluŃii. Altfel spus, precizia soluŃiei FEA este limitată.

IneficienŃa MEF pentru unele tipuri de analize. Pentru analiza unor probleme locale, ca de exemplu, pentru unele tipuri de concentratori, posibilitaŃile MEF sunt limitate în ceea ce priveşte performanŃele de eficienŃă şi precizie ale rezultatelor obŃinute prin FEA.
Limitările programului MEF. Oricât de general şi de performant ar fi un program el are implementate doar anumite tipuri de elemente finite şi de proceduri pentru analize, preprocesări şi postprocesări, ceea ce limitează performanŃele şi posibilităŃile de utilizare ale acestuia. PerformanŃele programelor au o dinamică deosebită, la intervale de câteva luni fiind lansate pe piaŃă noi variante, mai elaborate, ale programelor care s-au impus în practica modelării şi analizei cu elemente finite. Resursele sistemului de calcul. În prezent performanŃele calculatoarelor au atins nivele extrem de ridicate şi practic nu se ivesc, în general, dificutăŃi în a realiza FEA pentru modele oricât de complexe. Atingerea limitelor resurselor sistemului de calcul se poate produce în cazuri particulare, pentru analize neliniare, dinamice, procese iterative, etc, pentru numere foarte mari ale nodurilor şi elementelor modelului, dacă parametrii calculatorului au valori relativ modeste. Capcane ale practicii analizei cu elemente finite Folosirea intensivă şi extensivă a MEF, a evidenŃiat faptul că utilizatorilor li se întind numeroase capcane în practica analizei cu elemente finite. Se semnalează câteva dintre cele mai "periculoase" capcane care apar în practica analizei cu MEF, se fac atenŃionări şi se “emit” semnale de alarmă pentru prevenirea unor nereuşite ale utilizatorilor.
GeneralităŃi Se presupune că utilizatorul cunoaşte bine metoda şi programul cu elemente finite şi că el nu face greşeli. Altfel spus, trebuie făcută o distincŃie netă între "greşeli" şi "capcane". Se înŃeleg prin "capcane" acele "mici" pierderi din vedere, neglijenŃe sau alegeri "neinspirate" când sunt posibile mai multe opŃiuni sau mai multe "căi" de rezolvare a unui aspect concret al practicii FEA. În general, "căderea" într-o capcană nu compromite complet analiza cu MEF, nu duce la elaborarea unui model de calcul inutilizabil sau la obŃinerea unor rezultate complet greşite. Efectele "capcanelor" sunt, în general, subtile şi greu de determinat, după ce s-au produs. Ele privesc mai ales eficienŃa modelului, precizia şi nivelul de încredere al rezultatelor obŃinute. Şi poate că tocmai din aceste motive ele sunt periculoase şi trebuie tratate cu maximă atenŃie şi seriozitate. Capcanele sunt prezente la toate nivelurile şi în toate etapele FEA. O clasificare convenŃională şi discutabilă a capcanelor practicii analizei cu elemente finite, ar putea fi urmatoarea: capcane de ordin general şi capcane de nivel aplicativ.
Capcane de ordin general Capcanele de ordin general, care apar în practica FEA, sunt generate de chiar avantajele fundamentale ale MEF. Generalitatea MEF a făcut posibilă elaborarea unor programe de calcul deosebit de complexe, de dimensiuni uriaşe. Pe de altă parte, producătorii de soft vor să acopere cât mai bine cerinŃele unor utilizatori cât mai diverşi şi din ce în ce mai exigenŃi. În consecinŃă programele MEF au ataşată o documentaŃie cu un volum copleşitor: bazele teoretice, manualul de utilizare, exemple, tutorial, etc. Capcana care se naşte în acest context constă în faptul că un utilizator obişnuit nu îşi va însuşi satisfăcător documentaŃia programului, ceea ce duce la o utilizare incorectă, incompletă sau ineficientă a acestuia.

SupleŃea MEF este remarcabilă, adică metoda nu conŃine, în ea însăşi, restricŃii privind elaborarea modelului de calcul cu elemente finite. Capcana care rezultă este că modelul are un înalt grad de arbitrar, ceea ce face ca aspecte subiective, imposibil de cuantificat, ca intuiŃia, ingeniozitatea, experienŃa şi conştiinciozitatea utilizatorului să fie determinante în succesul unei analize cu MEF.
Simplitatea conceptelor de bază ale MEF a avut un rol determinant în răspândirea şi succesul metodei. NoŃiuni ca discretizare, element finit, model de calcul, etc., pot fi foarte uşor asimilate de un utilizator care are doar câteva modeste cunoştinŃe inginereşti. De aici rezultă o capcană foarte periculoasă care constă în faptul că utilizatorul nu este conştient de precaritatea competenŃei sale şi poate face analize cu MEF care sunt greşite. Superficialitatea utilizatorului va deveni o capcană care se va agrava mai ales după primele analize MEF reuşite, dar care pe termen mediu duce la necazuri. Utilizarea calculatorului şi a unui program adecvat sunt indispensabile pentru FEA a unei structuri oricât de simple. Chiar din principiul metodei rezultă un volum foarte mare de calcule numerice, care nu pot fi realizate decât pe calculatoare performante, cu programe specializate. În aceste condiŃii, analiza cu MEF capătă un înalt grad de automatizare, care poate constitui o capcană prin pierderea controlului asupra operaŃiilor pe care le realizează programul MEF. Pentru analiza unor structuri spaŃiale complicate poate deveni dificilă, ca urmare a automatizării preprocesării modelului, verificarea corectitudinii acestuia, depistarea eventualelor erori şi corectarea acestora, precum şi efectuarea unor modificări ale modelului iniŃial.
Capcane de nivel aplicativ Aceste capcane pot apare în diverse etape ale procesului FEA, ca de exemplu: preprocesarea, discretizarea, selectarea opŃiunilor etc. Numărul de noduri al reŃelei de discretizare pentru un model MEF este foarte greu de ales corect. În principiu numărul de noduri este bine să fie cât mai mare pentru a obŃine rezultate cât mai precise, dar apare capcana creşterii exagerate a numărului nodurilor fără a obŃine nici un efect favorabil. Această situaŃie apare când nu se au în vedere şi alte aspecte ale modelării: tipurile elementelor finite, scopul analizei, distorsiunea şi dimensiunile relative ale elementelor etc. Numărul elementelor finite este determinat de numărul nodurilor şi de tipul elementului. Dacă tipul elementului finit rămâne acelaşi, în general, dependenŃa numărului de elemente este liniară funcŃie de numărul nodurilor.
Tipul elementului finit poate constitui o altă capcană, în condiŃiile insuficienŃei cunoaşterii a caracteristicilor şi performanŃelor acestuia şi a utilizării inadecvate a tipului de element. Programele MEF au biblioteci cu zeci (sau sute) de tipuri de elemente finite tocmai pentru a oferi utilizatorului cel mai eficient element pentru o anumită analiză, a unei anumite structuri. Ignorarea scopului analizei este poate cea mai frecventă capcană întâlnită la elaborarea modelului de calcul cu MEF. Pentru a realiza o analiză eficientă, trebuie avut în vedere de la început ca modelul să corespundă cât mai bine unei anumite cerinŃe: analiza de tensiuni, calculul rigidităŃii, optimizare, răspuns dinamic, analiza termică etc. Discretizarea automată, adică generarea automată a nodurilor şi elementelor modelului de calcul, este o realizare remarcabilă a programelor actuale. Capcana pe care o conŃine această facilitate constă în aceea că utilizatorul MEF este fascinat de miracolul automatizării şi pierde din vedere unele exigenŃe ale unei modelări corecte şi performante, care pentru structuri industriale complexe poate duce la: - dificultatăŃi în localizarea unor noduri sau elemente finite; - creşterea excesivă a numărului de noduri şi elemente finite; - generarea unor elemente finite puternic distorsionate ; - pierderea controlului unor asamblări ale componentelor structurii;

- dificultăŃi în detectarea unor erori ale modelului şi corectarea lor. Valorile constantelor fizice şi elastice care trebuie introduse în calculul cu MEF, trebuie uneori determinate experimental, pentru condiŃiile reale ale structurii care se modelează. Aceste constante pot fi: factorii de amortizare ai vibraŃiilor, coeficienŃii de frecare, coeficienŃii de transfer termic pentru conductivitate, convecŃie sau radiaŃie, constantele elastice ale materialelor compozite, etc. Deoarece determinările experimentale pot fi costisitoare, utilizatorul "cade" în capcana "aproximărilor" şi introduce în calcul alte valori decât cele reale pentru constantele care definesc modelul de calcul. În numeroase cazuri variaŃii mici ale acestor valori pot duce la rezultate mult diferite de cele corecte. Procedurile speciale pentru rezolvarea rapidă a problemei (FFE – Fast Finite Element), sau procedurile de discretizare adaptivă (h, p, hp), pot duce la erori imprevizibile ale rezultatelor obŃinute, dacă aceste proceduri se folosesc fără a fi bine studiate. Metodele de discretizare adaptivă nu modifică structura iniŃială a modelului, adică nu modifică condiŃiile de rezemare şi de încărcare, valorile constantelor fizice, elastice etc, tipurile elementelor finite ş. a. m. d. Capcana constă în aceea că dacă modelul iniŃial a avut unele greşeli sau scăpări din vedere, metoda adaptivă, în toate variantele sale, nu le va înlătura sau ameliora, adică superioritatea noului model va fi iluzorie iar rezultatele obŃinute afectate de erori greu de estimat. Supraestimarea posibilităŃilor metodei şi programului este capcana începătorilor, care nu au în vedere faptul că MEF este aproximativă şi că pentru anumite tipuri de structuri rezultatele obŃinute pot fi nesatisfăcătoare, cel puŃin parŃial. Este cazul zonelor cu concentratori de tensiuni, ai structurilor subŃiri etc. Valorile tensiunilor în noduri sau în centrele elementelor finite pot avea în unele cazuri diferenŃe relativ mari şi atunci utilizatorul trebuie să răspundă la întrebarea capcană: care dintre valori sunt corecte?
Exemple Pentru a ilustra unele dintre ideile şi afirmaŃiile prezentate mai sus, se dau exemplele următoare: Exemplul 1. Figura 14.1 prezintă modelul de calcul al unei structuri simple, formată dintr-un înveliş strâmb în spaŃiu cu grosimea 10 mm şi un cilindru vertical cu grosimea 5 mm. Învelişul este definit prin punctele ABC situate în planul XOZ (OABC este un dreptunghi) şi punctul D situat pe axa OY.
Figura 14.1

Modelul este solicitat cu o forŃă concentrată verticală, de sus în jos, aplicată în punctul B, având valoarea 500 N şi o presiune exterioară (de sus în jos) de 0.01 N/mm2. Modelul este încastrat pe laturile AD şi DC. Discretizarea s-a făcut cu elemente de tip shell cu 3 noduri. S-au realizat cinci variante ale discretizării, aşa cum rezultă din tabelul 14.1. Discretizarea iniŃială (model 1) a avut 84 noduri şi 144 elemente. Printr-o procedură de rafinare a discretizării iniŃiale s-au obŃinut succesiv modelele 2, 3 şi 4, cu un număr de noduri şi elemente din ce în ce mai mare (tabelul 14.1). Modelul 5, cu 675 noduri şi 1276 elemente, s-a obŃinut printr-o procedură de discretizare adaptivă aplicată modelului iniŃial (model 1). Tabelul 14.1
Deplasarea maximă [mm] σech max (top) [N/mm²]
Model
Procedeu de discretizare
Număr noduri
Număr
elemente
δX
δY
δZ
δRez. În nod În element
Indicator de eroare
[%]
1
IniŃial
84
144
-1.24
-24.9
-3.04
24.9
79.5
88.3
44.75
2
Rafinare
312
576
-1.53
-30.7
-3.55
30.7
122.9
143.7
44.62
3
Rafinare
1200
2304
-1.75
-36.6
-4.23
36.6
284.6
221.5
36.13
4
Rafinare
4704
9216
-1.86
-39.9
-4.55
39.9
463.9
274.2
24.04
5
Adaptiv
675
1276
-1.96
-44.0
-5.01
44.0
314.7
259.2
30.76
Figura 14.2

Rezultatele obŃinute pentru cele cinci modele se dau în tabelul 14.1 şi au fost reprezentate grafic în figura 14.2. Din analiza rezultatelor obŃinute se pot formula următoarele observaŃii: - Creşterea numărului de noduri de 56 de ori şi a numărului de elemente printr-o procedură de rafinare de 64 de ori (modelele 1 - 4) duce la o creştere a deplasării rezultante maxime (δres max) de 1,6 ori, a tensiunii echivalente maxime în noduri (σech/nod) de 5.83 ori iar a tensiunii echivalente maxime în centrele elementelor (σech/elem) de 3,10 ori, indicatorul de estimare erorii scade de 1.86 ori. - Dacă se compară modelul iniŃial (model 1) cu cel obŃinut printr-o procedură de discretizare adaptivă (model 5) se constată o creştere a numărului de noduri de 8.03 ori şi a numărului de elemente de 8.86 ori, căreia îi corespunde o creştere a δres max de 1.76 ori, a σech/nod de 3.95 ori, a σech/elem de 2.93 ori, iar err.est. scade de 1.45 ori. - Compararea rezultatelor obŃinute pentru modelul 5 (adaptiv) cu modelul 4 (rafinat) arată că δres max este cu 10% mai mare, σech/nod cu 32% mai mic, σech/elem cu 5% mai mic şi err.est. cu 28% mai mare. - Din observarea alurilor curbelor reprezentate în figura 2 se constată: creşterea numărului de noduri şi de elemente are efecte importante pentru valori mici ale acestor numere; curbele de variaŃie ale δres max şi σech/elem (în funcŃie de numărul nodurilor) sunt foarte asemănătoare, aproape identice; curba de variaŃie a σech/nod diferă mult, ca aspect, de curbele δres max şi σech/elem, aceasta având o tendinŃă permanentă de creştere; pentru modelul 4, σech/nod este de 1.69 ori mai mare decât σech/elem. Exemplul 2. Modelul de calcul al unui capac pentru un utilaj tehnologic de mari dimensiuni se prezintă în figura 14.3. Discretizarea modelului s-a realizat cu 4615 noduri, 4264 elemente shell cu 4 noduri şi 400 elemente shell cu 3 noduri (pentru zonele de trecere). Modelul este solicitat de un sistem de sarcini aplicate de către diverse anexe, presiune exterioară de un bar ( în interior fiind vacuum ) şi de greutatea proprie. Rezemarea se face pe flanşa inferioară a capacului. S-au avut în vedere trei variante ale modelului, pentru care s-au păstrat cele 4615 noduri şi s-au modificat doar elementele astfel ( v. tabelul 14.2 ): - modelul 1: 4264 elemente shell cu 4 noduri, pentru care s-a considerat descompunerea în 4 triunghiuri şi 400 elemente shell cu 3 noduri; - modelul 2: identic cu modelul 1, dar pentru elemente shell cu 4 noduri s-a considerat descompunerea în 2 triunghiuri; - modelul 3: discretizarea are aceleaşi număr de noduri (4615) şi toate elementele sunt de tip shell cu 3 noduri. Pentru capacul din figura 14.3 s-au calculat şi abaterile dintre rezultatele (σech/nod, σech/elem, δres) obŃinute pentru modelele 2 şi 3, faŃă de cele obŃinute pentru modelul 1. Se constată că pentru δres abaterile sunt relativ mici (cca 1.8%), dar pentru tensiuni pot fi considerabile (max. 45%, tabelul 14.2) ceea ce arată importanŃa alegerii tipului elementului finit pentru o analiză MEF.

Figura 14.3
Tabelul 14.2
Număr elemente shell
Tensiunea echivalentă maximă Von Mises
σech. [ N/ mm²] σech. / nod σech. / element
Model
Tip
element shell cu 4
noduri Cu 4
noduri Cu 3
noduri Sus Jos Sus Jos
Deplasare rezultantă δrez
[mm]
Indicator de
eroare [%]
1
Descompus în 4
triunghiuri
4264
400
96
102
140
141
2.224
33.6
4264
400
113
141
141
179
2.265
38.7
2
Descompus în 2
triunghiuri Abateri faŃă de model 1 [%]
17.7
38.2
0.71
26.9
1.84
15.17
------
8928
113
127
185
205
2.263
51.1
3
Abateri faŃă de model 1 [%]
17.7
24.5
32.1
45.4
1.75
52.08
Exemplul 3. Pentru suportul din figura 10.7, modelul a avut 6203 noduri şi 4736 elemente brick8 (model 2, tabelul 10.1). Comparând rezultatele obŃinute pentru o analiză obişnuită cu cele oferite de procedura FFE (Fast Finite Element), se constată diferenŃe notabile, pentru evaluarea cărora s-au calculat variaŃiile relative, Vrel, în procente, cu relaŃia
Vrel = ( Vanaliză FFE - Vanaliză obişnuită ) / Vanaliză obişnuită * 100,
în care V este valoarea unei mărimi oarecare: deplasare sau tensiune. Valorile abaterilor obŃinute sunt: - pentru deplasarea rezultantă maximă Vrel = 38 %; - pentru tensiunea echivalentă maximă / nod Vrel = 33 %. - pentru tensiunea echivalentă maximă / elemenet Vrel = 10.5 %.

Pentru varianta suportului în care modelul a avut 4763 noduri, 3456 elemente brick8 pentru semibucşă şi 320 elemente shell4 pentru plăcile de susŃinere s-au obŃinut valorile (model 3, tabelul 10.1): - pentru deplasarea rezultantă maximă Vrel = -8.3 %; - pentru tensiunea echivalentă maximă / nod Vrel = 97 %. - pentru tensiunea echivalentă maximă / elemenet Vrel = -23 %. Se remarcă valorile foarte mari ale abaterilor, ceea ce justifică aprecierea că procedura FFE este o capcană şi că ea trebuie folosită doar pentru testări preliminare ale modelului. De fapt performanŃele excepŃionale ale sistemelor de calcul reduc utilitatea practică a unei proceduri de rezolvare rapidă a problemlor cu elemente finite. Concluzii Prezentarea câtorva "capcane" care pot apare în practica analizei cu MEF, nu este nici pe departe exhaustivă, obiectivul fiind doar acela de a semnala această problemă şi de atrage atenŃia asupra importanŃei "capcanelor". De fapt fiecare utilizator al MEF are "capcanele sale preferate", de sub influenŃa cărora nu se poate elibera decât apelând la experienŃa, ingeniozitatea şi intuiŃia sa, sau, dacă structura a fost analizată în prealabil – print-un procedeu oarecare – şi sunt disponibile recomandări clare şi detaliate privind abordarea problemei cu MEF, să urmeze acele recomandări.

8.
DISCRETIZAREA -- DEMERSUL FUNDAMENTAL AL MODELĂRII CU ELEMENTE FINITE
Primul demers care trebuie întreprins când se elaborează un model cu elemente finite (EF) este cel al discretizării structurii, adică trecerea de la continuul fizic al materialului din care este executată structura, la modelul convenŃional - geometric, discret, pentru care se va face analiza cu elemente finite (FEA). Pentru aceasta structura se “acoperă” cu o reŃea de linii şi suprafeŃe la intersecŃiile cărora se obŃin nodurile modelului, acest ansamblu fiind reŃeaua de discretizare. Felul în care s-a realizat acest proces, calitatea şi performanŃele sale, determină într-un mod categoric performanŃele şi eficienŃa modelului EF. Dacă discretizarea a fost concepută şi / sau executată defectuos, neajunsurile acesteia nu vor putea fi eliminate sau diminuate prin operaŃii sau demersuri ulterioare, ci ele se vor manifesta, sub diverse forme în calităŃile şi performanŃele modelului cu elemente finite. În limba engleză, pentru procesul de discretizare se foloseşte cuvântul meshing (se fac tentative de a introduce în limba română termenul “meşare”).
CondiŃii generale Întrebările “implicite” la care trebuie să “răspundă” cel care realizează discretizarea şi ulterior elaborarează modelul sunt multiple, dintre care unele se referă la: - numărul de noduri: maxim şi minim;
- tipurile elementelor; - numărul de elemente: maxim şi minim; - dimensiunile maxime şi minime ale elementelor, impuse de detaliile structurii şi de scopul calculului.
În principiu, pe reŃeaua de discretizare realizată se pot defini oricâte tipuri diferite de elemente. Totuşi pentru a realiza o discretizare corectă şi performantă trebuie avut în vedere încă de la început care sunt tipurile de elemente finite care se vor folosi pentru model. Discretizarea unei structuri este un proces complex de elaborare a unui model discret care să aproximeze cât mai bine structura continuă reală, din diverse puncte de vedere, ca, de exemplu, al formei geometrice, al modului de aplicare a sarcinilor, al condiŃiilor de rezemare, al rigidităŃilor, al maselor etc. Prin aceasta, studiul mulŃimii infinite de puncte a structurii continue date se aproximeză prin studiul mulŃimii finite de puncte – noduri – ale reŃelei de discretizare a modelului de calcul. Structura discretizată – sau discretă - aproximeză din punct de vedere geometric şi mecanic structura reală. În principiu, aproximarea este cu atât mai bună, rezultatele mai precise şi volumul informaŃiilor obŃinute cu atât mai mare cu cât numărul de noduri, respectiv numărul total de grade de libertate geometrică al structurii, este mai mare. CerinŃa de a discretiza structura printr-o reŃea cât mai fină, cu un număr cât mai mare de noduri, este evidentă, dar ea trebuie privită critic, cu foarte multă prudenŃă şi discernământ deoarece creşterea excesivă a numărului de necunoscute nu duce la îmbunătăŃirea soluŃiei.
Reperul global Un demers prealabil procesului de discretizare este alegerea sistemului global de coordonate – denumit reper global – la care se raportează structura şi modelul. Programele permit alegerea între mai multe tipuri de sisteme dintre care cele mai răspândite sunt: cartezian drept, cilindric (foarte comod pentru structuri axial simetrice). Este posibilă şi combinarea acestora -ca sisteme de coordonate

ajutătoare - adică tipul sistemului poate fi schimbat în diversele etape ale procesulului de elaborare a modelului. Alegerea reperului global determină într-o mare măsură configuraŃia reŃelei de discretizare, deoarece este mult mai comod ca liniile şi planele utilizate în procesul de discretizare să fie orientate după direcŃii paralele cu reperul global ales. Această idee se ilustrează cu exemplul din figura 6.1.
Figura 6.1 De asemenea, importanŃa alegerii raŃionale a originii şi direcŃiilor reperului global constă şi în faptul că numeroase mărimi sunt, sau pot fi, definite în raport cu acesta: gradele de libertate geometrică, deplasările şi sarcinile nodale, condiŃiile de rezemare, reacŃiunile în reazeme etc.
Forma reŃelei de discretizare Discretizarea trebuie să se realizeze, pe de o parte, printr-o reŃea cât mai simplă şi cât mai uniformă de linii şi (sau) suprafeŃe pentru ca elaborarea modelului, prelucrarea şi interpretarea rezultatelor să fie cât mai comode. Pentru reŃele relativ uniforme efortul de elaborare al modelului se poate reduce considerabil prin utilizarea “generării” automate a nodurilor şi elementelor. Pe de altă parte, nu este totdeauna raŃional ca reŃeaua să fie uniformă, deoarece structura poate avea zone în care există discontinuităŃi geometrice sau mecanice (de exemplu, puncte de aplicaŃie pentru sarcini concentrate) sau regiuni în care, consecinŃă a scopului urmărit, este necesar un volum mai mare de informaŃii – deci de noduri şi elemente - . Este cazul acelor zone în care gradienŃii tensiunilor sunt relativ mari. În aceste zone discretizarea trebuie să fie mai fină decât pentru restul structurii. Trecerea de la o zonă cu discretizarea mai fină la alta cu o discretizare grosieră trebuie făcută treptat, un exemplu, în acest sens, fiind prezentat în figura 6.2.
Figura 6.2

Tipurile elementelor finite În principiu, pe o reŃea de discretizare pot fi definite oricâte şi orice fel de elemente finite, cu condiŃia ca ele să fie adecvate, adică să aproximeze cât mai corect structura reală. De fapt, configuraŃia reŃelei de noduri trebuie stabilită încă de la început având în vedere tipurile elementelor care se vor utiliza. De exemplu, elemente triunghiulare sau patrulatere plane sau spaŃiale, de placă sau înveliş subŃiri sau groase, de bară, de conductă, prismatice sau tetraedrice etc.
Distorsiunea elementelor Se va urmări ca elementele să fie cât mai puŃin distorsionate, adică elementele triunghiulare să se apropie cât mai mult de un triunghi echilateral, cele patrulatere de un pătrat, cele hexaedrice de un cub etc.
CerinŃe imperative Procesul de discretizare implică un însemnat grad de arbitrar, adică MEF nu conŃine în ea însăşi restricŃii sau “indicaŃii” asupra modului în care trebuie să fie realizată reŃeaua de discretizare. Dar pentru ca modelul discret să aproximeze cât mai corect structura reală, trebuie avute în vedere cel puŃin următorele cerinŃe, despre care se poate spune că sunt imperative. Trebuie ca reŃeaua să aibă noduri corespunzătore pentru:
- modelarea contururilor structurii, adică ale liniilor şi suprafeŃelor care definesc şi delimitează structura; - determinarea cât mai precisă a joncŃiunilor şi intersecŃiilor dintre elementele constitutive ale structurii (linii şi suprafeŃe); - reŃeaua să conŃină noduri pentru reazemele şi pentru sarcinile concentrate ale structurii. Pentru analize statice ansamblul condiŃiilor de rezemare trebuie să împiedice modelul structurii să aibă mişcări de mecanism sau deplasări de corp rigid; - să fie definite noduri pentru zonele în care se doreşte cunoaşterea valorilor deplasărilor şi (sau) tensiunilor.
Substructurare şi submodelare Pentru structuri foarte complexe constructiv şi geometric discretizarea se poate face mai eficient dacă se utilizează tehnici de substructurare şi (sau) submodelare. Detalii privind aceste tehnici se găsesc în cadrul subiectului 12.
Discretizarea adaptivă Procedurile de discretizare adaptivă permit creştera performanŃelor discretizării şi modelului iniŃial, procesul fiind automatizat. După ce s-a procesat modelul iniŃial, se poate comanda programului MEF o procedură de discretizare suplimentară, mai fină, şi obŃinerea unui nou model, care, în principiu, este mai performant decât modelul iniŃial. Detalii prvind aceste proceduri se găsesc în cadrul capitolului 13.
Discretizarea automată Deoarece elaborarea modelului de calcul pentru FEA este un proces laborios, care cere înaltă calificare şi un efort considerabil din partea utilizatorului, programele actuale au implementate proceduri de preprocesare ale modelului cu elemente finite, discretizarea relizându-se automat. Fiecare program are comenzi şi proceduri specifice de preprocesare, care trebuie însuşite de utilizator din manualul de utilizare al programului respectiv.

În prezent toate programele folosesc un sistem de definire a geometriei modelului şi realizare a reŃelei de discretizare, care poate avea mai multe etape, funcŃie de complexitatea structurii. Pentru fixarea ideilor se va prezenta, ca exemplu, procesul de discretizare pentru structura din figura 6.3.
Figura 6.3 Etapa 1. Se defineşte un număr de puncte “principale” ale modelului. Aceste puncte se vor folosi ulterior pentru definirea unor linii, suprafeŃe sau volume. Toate aceste puncte sau doar unele dintre ele pot deveni ulterior noduri ale reŃelei de discretizare. Pentru asigurarea identificării şi comoditatea manevrării, punctele (şi ulterior liniile, suprafeŃele şi volumele) se numerotează automat de către program. Pentru exemplul considerat au fost definite 17 puncte, ca în figura 6.4. Etapa 2. Folosind punctele existente se definesc diverse linii drepte şi (sau) curbe, utilizând procedeele din geometrie. Liniile curbe se pot defini ca arce de cerc, arce de elice, curbe spline de diverse grade etc. Pentru exemplul considerat au fost definite 24 de linii drepte şi curbe, ca în figura 6.5.
Figura 6.4 Figura 6.5 Etapa 3. Cu ajutorul punctelor şi liniilor existente se definesc suprafeŃele necesare modelării structurii date. În acest proces se pot naşte linii noi, cum sunt cele de intersecŃie dintre diverse suprafeŃe şi se “şterg” puncte, linii şi suprafeŃe care nu mai sunt necesare în continuare. Dacă este cazul se pot defini şi volume. Pentru exemplul considerat au fost definite 8 suprafeŃe, ca în figura 6.6.
Figura 6.6 Figura 6.7

Etapa 4. Pentru modelul definit, aşa cum s-a arătat, programul MEF generează reŃeaua de discretizare. Programul îi oferă, de regulă, utilizatorului, la algere, mai multe proceduri pentru efectuarea discretizării sau meşării. Se poate opta pentru o discretizare parametrică sau pentru una “liberă”. Fiecare procedură are mai multe variante, în funcŃie de parametrii pe care îi alege utilizatorul şi anume: numărul nodurilor pentru elementul finit, numărul de noduri (sau de elemente) în lungul liniilor sau pe suprafeŃe, dimensiunea caracteristică a elementelor. Pentru exemplul considerat, meşarea parametrică, pentru elemente patrulatere, cu 6 elemente pe fiecare linie, arată ca în figura 6.7. Pentru a se realiza discretizarea modelului cu un efort cât mai mic, şi pentru a mări gradul de automatizare al meşării, programele MEF oferă o multitudine de facilităŃi de deservire, foarte utile şi eficiente în faza de preprocesare, cele mai utile fiind: copiere, simetrie, extrudere, rotire, translaŃie, conectare, condensare etc.
ObservaŃie. În capitolul de faŃă s-au expus doar aspecte calitative şi de principiu ale procesului de discretizare. În diferite alte capitole se prezintă, se comentează, se exemplifică şi se formuleză concluzii cantitative privind aspectele numerice, concrete ale discretizării.

9.
PROCEDURI SPECIALE ÎN PROGRAMELE CU ELEMENTE FINITE
Acest capitol este consacrat în principal metodelor de rezolvare a ecuaŃiilor de echilibru global ale structurilor, cu referire la impunerea unor condiŃii la limită particulare, care apar din necesitatea modelării unor articulaŃii intermediare, elemente perfect rigide, reazeme înclinate, cuplarea substructurilor, etc. De asemenea se fac referiri la o serie de algoritmi şi se discută implicaŃiile pe care alegerea inadecvată a unor opŃiuni de calcul o poate avea asupra rezultatelor. Se fac unele referiri la modul de obŃinere a matricelor de rigiditate, la limitările lor şi la corecŃiile "numerice" necesare pentru ca acestea să lucreze cât mai eficient.
Rezolvarea sistemelor de ecuaŃii liniare ordinare
Atât în analiza statică cât şi în analiza dinamică (vezi cap. 21) sau de stabilitate (în prima etapă de calcul - vezi cap. 25) apare problema rezolvării unui sistem de ecuaŃii liniare cu un număr foarte mare de ecuaŃii (zeci sau sute de mii). Acesta rezultă în urma operaŃiei de asamblare şi a impunerii condiŃiilor la limită, în cazul analizelor statice şi de stabilitate şi/sau a unor transformări, în cazul analizelor dinamice. Cert este faptul că procedurile de rezolvare a sistemelor de ecuaŃii liniare reprezintă o etapă esenŃială pentru rezolvarea unei clase foarte largi de probleme şi stăpânirea principiilor de lucru ale acestora poate influenŃa atât rezultatele obŃinute, cât şi efortul de calcul (timpul de lucru şi spaŃiul necesar pe hard discul calculatorului).
Din punct de vedere matematic şi informatic metodele de rezolvare a sistemelor de ecuaŃii liniare sunt multiple. Metoda elementelor finite, prezintă anumite faze intermediare până la obŃinerea sistemului liniar de ecuaŃii (cum ar fi asamblarea ecuaŃiilor de echilibru la nivel de element, în ecuaŃia globală de echilibru a structurii şi impunerea condiŃiilor de echilibru) şi uneori aceste faze intermediare influenŃează algoritmii de rezolvare, cu scopul de a obŃine o eficienŃă mai mare a metodei. În continuare, se evidenŃiază anumite aspecte generale ale principalelor metode de rezolvare, făcându-se referire la analiza structurală statică.
Analiza statică, caracteristică sistemelor fizice în care se neglijează efectul amortizării şi al inerŃiei (este vorba de vibraŃii), nu şi al efectului greutăŃii proprii, constă în rezolvarea sistemului de ecuaŃii liniare rezultat în urma asamblării
[ ] FuK = , (13.1)
în care [ ]K este matricea de rigiditate a structurii, de regulă singulară, putând include şi matricea de rigiditate geometrică, u este vectorul deplasărilor nodale ale structurii, iar F este vectorul forŃelor nodale ale structurii. Vectorul u are în general două componente, a deplasărilor impuse
ru (de cele mai multe ori nule) şi a deplasărilor necunoscute au . Deplasările cunoscute introduc
o componentă a forŃelor de reacŃiune rF , iar pentru deplasările necunoscute se cunosc forŃele
aplicate structurii aF , deci, folosind această partiŃionare, se poate scrie
=+=r
ara
F
FFFF .
(13.2)

ForŃele aplicate structurii provin din forŃele aplicate direct în noduri, forŃele produse de o mişcare cu acceleraŃie constantă a structurii şi/sau a câmpului gravitaŃional, forŃe produse de variaŃiile de temperatură (efectul termoelastic) şi forŃe echivalente, produse de presiunea care lucrează pe elemente.
PartiŃionarea ecuaŃiei (13.1) în concordanŃă cu gradele de libertate “a” şi “r” conduce la relaŃia matriceală
[ ] [ ]
[ ] [ ]
=
r
a
r
a
rrra
araa
F
F
u
u
KK
KK.
(13.3)
Din prima ecuaŃie (13.3) rezultă deplasările necunoscute
[ ] [ ] ( )rara1
aaa uKFKu −= − , (13.4)
iar apoi, din a doua ecuaŃie, cunoscând toate deplasările, rezultă reacŃiunile
[ ] [ ] rrrarar uKuKF += . (13.5)
Se observă că deplasările necunoscute pot fi obŃinute dacă submatricea de rigiditate [ ]aaK este
nesingulară, adică structura (sau substructura raportată la gradele de libertate master “a”) nu are mişcare de solid rigid sau mecanism. Dacă totuşi echilibrul este asigurat de forŃele aplicate, se poate face un artificiu de înlăturare a singularităŃii matricei, fie prin fixarea unor deplasări care suprimă mişcarea de corp rigid sau mecanism, fie prin introducerea adiŃională de elemente în matricea respectivă care nu modifică considerabil matricea de rigiditate, dar care o transformă în matrice pozitiv definită. Trebuie menŃionat că deşi în ecuaŃia (13.4) apare inversa unei submatrice din matricea de rigiditate globală a structurii, aceasta nu se calculează practic niciodată. Metodele de rezolvare a sistemelor de ecuaŃii sunt implementate astfel încât numărul de operaŃii pentru rezolvarea lor să fie minim.
Metodele de rezolvare a ecuaŃiilor liniare în forma matriceală (13.3) se pot clasifica în: A. metode
exacte, cum ar fi metoda de eliminare Gauss, metoda de factorizare Choleski sau metoda de rezolvare frontală şi B. metode aproximative, cum ar fi metoda gradienŃilor conjugaŃi sau a relaxării.
Metodele exacte de rezolvare se referă la faptul că există algoritmi bine definiŃi, care după un număr de paşi dinainte fixat - dependent de dimensiunea problemei, conduc la obŃinerea soluŃiei exacte, în ipoteza că erorile de reprezentare a numerelor în calculator (de trunchiere) sunt nesemnificative. Pentru reprezentarea în dublă precizie şi probleme de dimensiuni acceptabile, bine condiŃionate numeric (adică cu valori ale raportului dintre cea mai mare şi cea mai mică valoare de pe diagonala principală a matricei de rigiditate, cât mai aproape de unitate), metodele de rezolvare exactă s-au dovedit destul de eficiente, ani de-a rândul. Aceste metode Ńin seama de simetria şi caracterul bandă al matricei de rigiditate, pentru a fi mai eficiente. Pentru a obŃine o matrice cu o lăŃime cât mai mică a benzii, numerotarea iniŃială a nodurilor se schimbă (se face renumerotarea nodurilor folosind algoritmi consacraŃi), dacă se foloseşte algoritmul de eliminare Gauss, sau se renumerotează elementele dacă se foloseşte algoritmul de rezolvare frontală. Acesta din urmă s-a impus în perioada în care memoria RAM a calculatoarelor era relativ limitată şi se bazează pe combinarea fazei de asamblare cu cea de eliminare a ecuaŃiilor (în memoria ROM). Algoritmul este foarte sofisticat, dar este stabil şi se foloseşte pe scară largă şi în momentul de faŃă. Metodele de rezolvare exactă prezintă două faze, prima este denumită eliminare sau triunghiularizare, iar cea de-a doua retrosubstituŃie. Deoarece aceste metode sunt descrise pe larg în diverse cărŃi şi tratate, cei interesaŃi sunt invitaŃi să consulte lucrări consacrate acestora.
Metoda gradienŃilor conjugaŃi cunoaşte diverse variante de implementare cum ar fi: 1. “Jacobi Conjugate Gradient” (JCG), recomandat pentru probleme bine condiŃionate numeric, algoritm implementat pentru matrice reale şi complexe, simetrice şi nesimetrice; 2. “Preconditioned Conjugate Gradient” (PCG) implementat pentru matrice reale, simetrice şi pozitiv definite; 3.

“Incomplete Choleski Conjugate Gradient” (ICCG) mai robust decât primele două, implementat pentru matrice reale şi complexe, simetrice şi nesimetrice. PCG este de circa 4-10 ori mai rapid decât JCG, iar ICCG este în general mai rapid decât JCG.
În metodele aproximative soluŃia sistemului (13.1) cu condiŃiile la limită impuse, se determină ca sumă a seriei vectorilor jp
mm2211 papapau +++= … , (13.6)
în care m este mai mic decât dimensiunea matricei [ ]K iar jp sunt corecŃii succesive ale soluŃiei.
Valoarea de start a acestor vectori poate influenŃa foarte mult numărul de iteraŃii m. Rata de convergenŃă este proporŃională cu rădăcina pătrată a numărului de condiŃionare a matricei [ ]K , iar criteriul de convergenŃă este
2T
jT
j
FF
RRε≤ ,
(13.7)
în care [ ] jj uKFR −= poate fi privit ca un reziduu pentru ju - vectorul deplasare determinat
la pasul j. De obicei 510−=ε se consideră acceptabil pentru aplicaŃii, dar poate fi redus dacă este necesar.
Pentru dimensiuni mari ale matricilor de rigiditate, care în general conŃin multe zerouri (motiv pentru care se numesc şi "matrice rare" - “sparse”), tehnicile de operare cu acestea s-au dovedit foarte eficiente, pentru creşterea vitezei de calcul, prin înlăturarea operaŃiilor aritmetice cu zero şi spaŃiul necesar, deoarece pentru valorile nule nu se alocă spaŃiu în memorie.
Metodele de rezolvare aproximativă, prin iterarea soluŃiei, s-au dovedit a fi mult mai eficiente, în primul rând, ca viteză de calcul şi s-au impus odată cu creşterea memoriei centrale (RAM) a calculatoarelor. Unele firme au introdus noŃiunea de FFE ("Fast Finite Element"), pentru anumite versiuni ale programelor care foloseau o astfel de procedură de rezolvare, eventual combinată cu alte facilităŃi sau proceduri pentru creşterea vitezei programelor MEF.
Rezolvarea sistemelor de ecuaŃii liniare cu legături
CondiŃiile la limită în deplasări liniare (şi rotiri) pot fi interpretate, din punct de vedere matematic, ca nişte restricŃii asociate unui sistem de ecuaŃii. Aceste restricŃii pot fi relaŃii simple de impunere a unor deplasări, sau relaŃii cinematice între anumite grade de libertate. Uneori acestea poartă denumirea de relaŃii de legătură între mărimile nodale. Procedeele matematice de rezolvare a unui sistem de ecuaŃii cu restricŃii sunt multiple. Cele mai utilizate metode sunt eliminarea unui număr de ecuaŃii egal cu numărul condiŃiilor de restricŃie, metoda multiplicatorilor Lagrange şi metoda funcŃiei de penalizare. Din punct de vedere fizic, o resticŃie poate să includă un singur grad de libertate, cum ar fi, spre exemplu, impunerea unei deplasări nodale pe o anumită direcŃie (blocaj sau deplasare cunoscută), sau mai multe grade de libertate, ca, de exemplu, condiŃia ca pe două grade de libertate o mărime nodală să aibă aceeaşi valoare nenulă, iniŃial necunoscută. RestricŃiile impuse mai multor grade de libertate (restricŃii multipunct) sunt, în general, produse de prezenŃa elementelor rigide sau a unor modelări de preluare a mişcărilor de mecanism. Dacă ecuaŃia de echilibru static a unei structuri asamblate, pentru care s-au impus sau nu anumite condiŃii la limită în deplasări este (13.1), care în continuare se scrie (adică vectorul deplasărilor u devine U)
[ ] FUK = , (13.8)
iar restricŃiile - ecuaŃii liniar independente, sunt scrise în forma

[ ] QUC = , (13.9)
se pune problema de a rezolva ecuaŃia (13.8) care să satisfacă condiŃiile (13.9). Matricea [C] este o matrice dreptunghiulară cu termeni constanŃi, care are un număr de linii egal cu numărul de restricŃii. Vectorul Q este, de asemenea, un vector de constante. De cele mai multe ori, în practică, este un vector cu toate elementele nule. În continuare, se prezintă câteva metode de includere a restricŃiilor în ecuaŃia de echilibru a modelului structurii. 1. Metoda eliminării. EcuaŃia (13.8), care conŃine n grade de libertate, se poate aranja astfel încât
vectorul deplasărilor nodale să fie de forma TTe
Tr UUU = , în care rU reprezintă
deplasările "reŃinute" (în număr de r), iar eU deplasările care urmează a fi "eliminate" (în număr
de e, deci n = r + e). În aceste condiŃii ecuaŃia (13.9) poate fi rescrisă în forma
[ ] [ ][ ]
0
U
UCC
e
rer =
.
(13.10)
Deoarece numărul de ecuaŃii liniar independente r, este mai mic decât numărul ecuaŃiilor de echilibru n, rezultă că matricea [ ]eC este pătratică şi nesingulară. Din ecuaŃia (13.10) rezultă
[ ] [ ] rr1
ee UCCU −−= , (13.11)
relaŃie care poate fi înglobată în transformarea
[ ]
[ ] [ ] r
r1
e
r
e
rU
CC
I
U
U
−=
−,
(13.12)
care poate fi rescrisă sub forma
[ ] 1rr
rn1nUTU
×××
= ; [ ][ ]
[ ] [ ]
−=
−r
1e
r
CC
IT ,
(13.13)
în care [ ]rI este matricea identitate. Dacă ecuaŃia (13.13.b) se înlocuieşte în (13.8) şi ecuaŃia (13.8) se înmulŃeşte la stânga cu transpusa matricei de transformare [T], rezultă un sistem de r ecuaŃii, adică
[ ] rrr FUK = , (13.14)
în care
[ ] [ ] [ ][ ]TKTK Tr = ; [ ] FTF T
r = . (13.15)
Matricea [T] se poate obŃine şi în mod direct, prin formularea directă a relaŃiei (13.13.a). Dacă deplasările impuse sunt nule, adică 0Ue = , atunci [ ] [ ]rr IC = , [ ] [ ]0Ce = şi matricea de rigiditate
redusă se obŃine prin eliminarea liniilor şi coloanelor corespunzătoate deplasărilor nule, adică corespund setului r
[ ] [ ] rrr KK = , (13.16)
şi se ajunge la rezolvarea unui sistem de ecuaŃii ordinare, prezentată în paragraful precedent.

2. Metoda multiplicatorilor Lagrange. Această metodă se bazează pe minimizarea unei funcŃii în care variabilele nu sunt liniar independente. În cazul analizei structurale, se pleacă de la expresia
potenŃialului (4.5), rescris în forma matriceală [ ] FUUKU2
1 TT−=Π şi se obŃine
[ ] [ ] ( )QUCFUUKU21 TTT
−λ+−=Π ,
(13.17)
adică la expresia potenŃialului se adună ecuaŃia (13.9) înmulŃită cu vectorul Tλ care reprezintă
multiplicatorii Lagrange şi au semnificaŃia unor forŃe care "păstrează" echilibrul structurii.
CondiŃiile de staŃionaritate a ecuaŃiei (13.17), adică
0U
=
∂
Π∂ şi
0=
λ∂
Π∂ conduc la
sistemul de ecuaŃii
[ ] [ ]
[ ] [ ]
=
λ
Q
FU
0C
CK T
.
(13.18)
Acest sistem are dimensiunea n + r, mai mare decât a sistemului iniŃial (13.8), iar pentru rezolvarea lui poate fi adaptată procedura de eliminare Gauss, deşi matricea care se triunghiularizează are termeni nuli pe diagonala principală. 3. Metoda funcŃiei de penalizare. Această metodă conduce la determinarea aproximativă a necunoscutelor şi deci la satisfacerea aproximativă a restricŃiilor, adică relaŃia (13.9), se rescrie în forma
[ ] QUCr −= (13.19)
şi se introduce în expresia potenŃialului (4.5) astfel:
[ ] [ ] rr2
1FUUKU
2
1 TTTα+−=Π .
(13.20)
Mărimea suplimentară [ ] rr2
1 Tα din expresia potenŃialului poartă denumirea de funcŃie de
penalizare. Matricea [ ]α se alege de formă diagonală. Dacă expresia (13.19) se introduce în
expresia potenŃialului (13.20) şi se pune condiŃia de minim pentru potenŃial
0U
=
∂
Π∂, se obŃine
[ ] [ ] [ ][ ]( ) [ ] [ ][ ]QCFUCCK TTα+=α+ . (13.21)
Matricea [ ] [ ][ ]CC Tα , numită matrice de penalizare, se adaugă la matricea de rigiditate a
structurii, iar vectorul [ ] [ ][ ]QC Tα se adună la vectorul încărcărilor nodale iniŃiale. Dacă [ ] [ ]0=α
atunci restricŃiile aplicate sunt neglijate. Dacă norma matricei [ ]α creşte vectorul deplasărilor
nodale U se modifică în aşa fel încât restricŃiile sunt din ce în ce mai bine ("aproape") satisfăcute.
Este de dorit ca matricea [ ]α să conŃină termeni adimensionali, adică independenŃi de gradele de libertate, care pot fi deplasări şi rotiri. Această metodă păstrează nealterată dimensiunea iniŃială a problemei, dar din cauza matricei [ ]α , care trebuie să aibă termeni mult mai mari decât valorile rigidităŃilor corespunzătoare diagonalei principale a matricei [K], poate conduce la apariŃia unor probleme numerice, deoarece valoarea

parametrului de condiŃionare (numărul de condiŃionare) a matricei [ ] [ ] [ ][ ]CCK Tα+ creşte foarte
mult şi aceasta poate deveni singulară.
AplicaŃii Pentru a evidenŃia unele aspecte practice ale relaŃiilor de legătură între gradele de libertate, se prezintă câteva aplicaŃii simple, pentru modele plane de grinzi şi cadre cu bare drepte. Se consideră cunoscute expresiile matriceler de rigiditate şi masă în coordonate locale ale elementului de grindă Euler-Bernoulli BEAM2D, de lungime L, aria secŃiunii transversale A, momentul de inerŃie al secŃiunii I, modulul de elasticitate longitudinal al materialului E şi densitate ρ , adică matricea de rigiditate în coordonate locale este
[ ]
−
−−−
−
−
−
−
=
22
22
22
22
3e
L4L60L2L60
L6120L6120
00I
LA00
I
LAL2L60L4L60
L6120L6120
00I
LA00
I
LA
L
IEk ;
matricea de masă coerentă este
[ ]
−−−
−
−
−
ρ=
22
22e
L4L220L3L130
L221560L13540
001400070
L3L130L4L220
L13540L221560
007000140
420
LAm ;
iar matricea de masă diagonală este
[ ]
ρ=
2
2e
L5.1700000
02100000
00210000
000L5.1700
00002100
00000210
420
LAm .
Matricea de transformare a deplasărilor (respectiv a matricelor de rigiditate), din sistemul local în sistemul global este

[ ]
ββ−
ββ
ββ−
ββ
=
100000
0cossin000
0sincos000
000100
0000cossin
0000sincos
Te ,
în care β este unghiul pe care axa locală a barei x îl face cu axa globală X. Exemplul 1: Cuplarea a două substructuri. Se consideră modelul simplificat a două substructuri S1 şi S2, cuplate rigid, ca în figura 13.1.a. Se cunosc =ℓ 1; E = 1; I = 0.25; F = 1 şi se cer deplasările nodurilor structurii, precum şi forŃele de legătură între cele două substructuri.
Figura 13.1 Din punct de vedere fizic, substructura reprezintă o porŃiune esenŃială dintr-o structură care este discretizată independent într-un număr de elemente finite. Din punct de vedere matematic substructura are două seturi de reprezentări: una iniŃială, dictată de discretizarea substructurii şi una condensată, dictată în general de condiŃiile la limită ale substructurii, învecinarea cu eventuale alte existente sau potenŃiale substructuri. De regulă, numerotarea nodurilor unor substructuri care trebuie să lucreze într-o structură, se face astfel încât numerele de identificare ale nodurilor dintr-o substructură, nu se regăsesc în altă substructură. Această convenŃie nu este obligatorie, dar uşurează prezentarea rezultatelor şi uneori se impune funcŃie de structura internă a programului de calcul. CondiŃiile la limită ale substructurilor pot fi impuse odată cu crearea substructurilor şi/sau în faza de generare a structurii formate din mai multe substructuri. În faza de generare a structurii, substructurile sunt definite printr-un număr relativ mic de grade de libertate (numite grade de libertate master), definite într-un anumit sistem de coordonate şi de matricele de rigiditate, masă şi eventual amortizare corespunzătoare acestor grade de libertate. Pentru informaŃii suplimentare despre substructurare se poate consulta capitolul 12. Pentru simplificare, se foloseşte discretizarea din figura 13.1.b şi gradele de libertate asociate raportate la acelaşi sistem de referinŃă. Se consideră substructura 1, cu condiŃiile la limită impuse în încastrare, iar substructura 2, cu forŃele exterioare (forŃa F) aplicate. În aceste condiŃii, matricea de rigiditate şi vectorul încărcărilor pentru substructura 1 sunt cele definite în relaŃia
=
ϕ
−
−
2
2
2
2
M
Fv
26
624,

iar pentru substructura 2, în relaŃia
=
ϕ
ϕ
−
−−−
−
−
0
1
M
F
v
v
2616
624624
1626
624624
3
3
4
4
3
3
.
Dacă cele două substructuri formează o structură printr-o modalitate oarecare de cuplare, atunci relaŃiile de echilibru ale substructurilor se pot scrie în forma matriceală
=
ϕ
ϕ
ϕ
−
−−−
−
−
−
−
0
1
M
F
M
F
v
v
v
261600
62462400
162600
62462400
000026
0000624
3
3
2
2
4
4
3
3
2
2
[ ] FUK =⇔ ,
(13.22)
la care se impun condiŃiile de cuplare. În cazul de faŃă acestea sunt în deplasări şi forŃe
ϕ=ϕ
=
32
32 vv;
=+
=+
0MM
0FF
32
32 .
(13.23)
A. Dacă rezolvarea se face prin metoda eliminării, atunci se particularizează relaŃia (13.13)
[ ]
ϕ
ϕ=
ϕ
ϕ
=
ϕ
ϕ
ϕ
4
4
2
2
4
4
2
2
4
4
3
3
2
2
v
v
Tv
v
1000
0100
0010
0001
0010
0001
v
v
v
şi apoi relaŃia (13.14); rezultă
=
+
+
=
ϕ
ϕ
−
−−−
−
−
0
1
0
0
0
1
MM
FF
v
v
2616
624624
1640
624048
32
32
4
4
2
2
,
în care s-a Ńinut seama de relaŃiile de echilibru ale forŃelor şi momentelor în joncŃiunea nodurilor 2 şi 3, adică 0FF 32 =+ şi 0MM 32 =+ . Din sistemul de ecuaŃii de mai sus, rezultă

=
ϕ
ϕ
2
3333.1
5.1
4167.0
v
v
4
4
2
2
.
Deplasările pentru toate nodurile rezultă din (13.13.a), adică [ ] rUTU =
=
ϕ
ϕ
=
ϕ
ϕ
ϕ
2
3333.1
5.1
4167.0
5.1
4167.0
v
v
1000
0100
0010
0001
0010
0001
v
v
v
4
4
2
2
4
4
3
3
2
2
.
ForŃele din joncŃiune rezultă din ecuaŃia de echilibru global a structurii F=[K]U
−
−=
ϕ
ϕ
ϕ
−
−−−
−
−
−
−
=
0
1
5.0
1
5.0
1
v
v
v
261600
62462400
162600
62462400
000026
0000624
0
1
M
F
M
F
4
4
3
3
2
2
3
3
2
2
,
şi sunt reprezentate în figura 13.1.c. B. Dacă se adoptă metoda multiplicatorilor Lagrange, atunci se formează mai întâi matricea [C], din rescrierea relaŃiilor (13.23.a), în forma (13.9)
=
ϕ
ϕ
ϕ
−
−
0
0
0
0
0
0
v
v
v
001010
000101
4
4
3
3
2
2
[ ] 0UC =⇔ .
(13.24)
Sistemul de ecuaŃii care se rezolvă este (13.18), adică pentru această aplicaŃie
[ ] [ ]
[ ] [ ]
=
λ
0
FU
0C
CK T
.
(13.25)
Deoarece F este parŃial necunoscut, acest sistem nu poate fi rezolvat atât timp cât nu se consideră şi relaŃiile (13.23.b). Folosind relaŃiile menŃionate, vectorul forŃelor F devine

−
−=
=
0
1
M
F
M
F
0
1
M
F
M
F
F2
2
2
2
3
3
2
2
.
(13.26)
Din prima ecuaŃie a sistemului (13.25), rezultă
[ ] [ ] λ−=TCFUK ,
relaŃie, care scrisă desfăşurat pentru termenul din dreapta şi considerând ecuaŃia (13.26) conduce la
[ ]
λ−
λ−
λ
λ
−
−
−=
0
0
0
1
M
F
M
F
UK2
1
2
1
2
2
2
2
.
Această relaŃie permite ca eforturile 2F şi 2M , iniŃial necunoscute, să poată fi alese arbitrar,
deoarece multiplicatorii Lagrange 1λ şi 2λ "corectează" ecuaŃia de echilibru funcŃie de alegerea făcută. De obicei componentele necunoscute ale vectorului F se aleg iniŃial nule, astfel că multiplicatorii Lagrange reprezintă chiar forŃele de legătură care menŃin echilibrul. Dacă componentele necunoscute ale vectorului F se aleg la întâmplare, şi acest vector se notează 0F ,
se obŃine vectorul 0λ din rezolvarea sistemului (13.25), iar forŃele reale din sistem rezultă din
[ ] 0T
0 CFF λ−= . (13.27)
Pentru exemplificare, se prezintă doar soluŃiile multiplicatorilor Lagrange pentru două cazuri de alegere a vectorului F0. Se menŃionează că deplasările U rezultă corect indiferent de alegerea F0. Dacă se alege 010000F T
0 = atunci rezultă =λ1 -1 şi =λ2 -0.5, iar dacă se
alege 011.0101.010F T0 −−= atunci rezultă =λ1 9 şi =λ2 -0.4. Folosind relaŃia
(13.27) se poate verifica că se obŃin rezultate corecte pentru forŃele necunoscute din noduri în ambele cazuri. Dacă cuplarea a două substructuri este rigidă, ca în cazul de faŃă, atunci se poate recurge şi la asamblarea directă a matricelor de rigiditate. Pentru aceasta în exemplul prezentat se "forŃează" numerotarea nodurilor 2 şi 3 printr-un singur număr. În acest fel condiŃiile de continuitate (13.23) sunt automat considerate de procedeul de asamblare şi se reduce efortul de calcul. Exemplul 2. Reazem înclinat. Se consideră structura plană, formată din două grinzi identice, ca în figura 13.2.a. Aceasta este sprijinită la un capăt, pe un reazem înclinat faŃă de orizontală. Pentru simplificarea calculului se consideră =ℓ 1; E = 1; A = 1; I = 1; F = 1. Se cer deplasărilor nodale şi reacŃiunile. Se presupune că sistemul global de axe trebuie să coincidă cu cel precizat în problemă, deoarece, altfel, cel mai simplu mod de a aborda problema este de a alege sistemul de axe global

astfel încât condiŃiile de rezemare putându-se impune pe orice direcŃie, una dintre axe să fie cea a reazemului. Pentru a obŃine matricea de rigiditate a structurii, se consideră mai întâi fiecare element în sistemul local de coordonate al elementului (fig. 13.2.b) şi se scriu matricele de rigiditate ale elementelor, care rezultă
1 2 1 0 0 -1 0 0 0 12 6 0 -12 6
0 6 4 0 -6 2
1 . [ ]1k = [ ]1K =
-1 0 0 1 0 0 0 -12 -6 0 12 -6 0 6 2 0 -6 4
2
Figura 13.2
Deoarece sistemul de referinŃă local al elementului 1 coincide cu sistemul de referinŃă global (fig.
13.2.c) rezultă [ ]1k = [ ]1K . Pentru a obŃine matricea de rigiditate globală a elementului 2 (în sistemul
de referinŃă local rezultă [ ]2k = [ ]1k ), se determină mai întâi matricea de transformare a coordonatelor ( °=β 90 )
2 3 0 1 0 0 0 0 -1 0 0 0 0 0
0 0 1 0 0 0
2
[ ]2T = 0 0 0 0 1 0
0 0 0 -1 0 0 0 0 0 0 0 1
3
şi rezultă

2 3 12 0 -6 -12 0 -6 0 1 0 0 -1 0
-6 0 4 6 0 2
2 . [ ]2K = [ ] [ ] [ ]22T2 TkT =
-12 0 6 12 0 6 0 -1 0 0 1 0 -6 0 2 6 0 4
3
Prin asamblarea celor două matrice de rigiditate, rezultă matricea de rigiditate a structurii fără condiŃiile la limită impuse
1 2 3 1 0 0 -1 0 0 0 0 0 0 12 6 0 -12 6 0 0 0 0 6 4 0 -6 2 0 0 0
1
-1 0 0 13 0 -6 -12 0 -6 0 -12 -6 0 13 -6 0 -1 0
[ ]K =
0 6 2 -6 -6 8 6 0 2
2 .
0 0 0 -12 0 6 12 0 6 0 0 0 0 -1 0 0 1 0 0 0 0 -6 0 2 6 0 4
3
Dacă se impun doar deplasările nule din încastrare matricea de rigiditate a structurii se obŃine
2 3 13 0 -6 -12 0 -6 0 13 -6 0 -1 0
-6 -6 8 6 0 2
2
, [ ]K = -12 0 6 12 0 6
0 -1 0 0 1 0 -6 0 2 6 0 4
3
iar vectorul încărcărilor nodale este T000010F −= .
Model 1. La sistemul de ecuaŃii [ ] FUK = trebuie introdusă o condiŃie suplimentară de
legătură între gradele de libertate din nodul 3. Aceasta este 33 U3V = şi se poate folosi pentru
obŃinerea matricei de transformare în metoda de eliminare a restricŃiilor, adică
[ ]
ϕ
ϕ=
ϕ
ϕ
=
ϕ
ϕ
3
3
2
2
2
C
3
3
2
2
2
3
3
3
2
2
2
U
V
U
T
U
V
U
10000
03000
01000
00100
00010
00001
V
U
V
U
.
Folosind matricea de transformare, se obŃine

[ ] [ ] [ ] [ ]
−
−−
−−
−−
−−−
==
46206
6156312
26866
036130
6126013
TKTK CT
CC ;
[ ] TTCC 00010FTF −== .
Deplasările necunoscute rezultă prin rezolvarea sistemului [ ] CCC FUK = , adică
[ ]
−
−
−
−
−
==
ϕ
ϕ−
1308.0
0411.0
2340.0
1904.0
2064.0
FK
U
V
U
C1
C
3
3
2
2
2
,
de unde, prin expandare şi considerarea relaŃiei de legătură, rezultă deplasările pentru întreaga structură
T1308.00713.00411.02324.01904.02064.0000U −−−−−−= .
Dacă se reconsideră ecuaŃia de echilibru a structurii, se pot obŃine forŃele (şi reacŃiunile) din fiecare nod, adică
[ ]
−
−==
=
0
1192.0
2064.0
0
1
0
6745.0
8808.0
2064.0
UK
M
F
F
M
F
F
M
F
F
F
3Z
3Y
3X
2Z
2Y
2X
1Z
1Y
1X
.
Model 2. O altă posibilitate de modelare a problemei propuse este prezentată în figura 13.2.d, adică pentru a înlătura deplasarea pe direcŃia normală reazemului, se introduce în nodul cu reazem un arc de rigiditate relativ mare (metoda penalizării), în comparaŃie cu rigiditatea structurii. Matricea de rigiditate globală a arcului care se asamblează în nodul 3 este
[ ]
−
−
=
000
02500.04330.0
04330.07500.0
kKarc ,
în care, k reprezintă constanta elastică a arcului. Dacă se alege k=100, rezultă matricea de rigiditate redusă în coordonate globale

2 3 13 0 -6 -12 0 -6 0 13 -6 0 -1 0
-6 -6 8 6 0 2
2
. [ ]srK =
-12 0 6 87 -43.3013 6 0 -1 0 -43.3013 26 0 -6 0 2 6 0 4
3
Pentru două valori diferite ale lui k, (k = 100 şi k = 108) rezultă deplasările nodale
[ ]
−
−
−
−
−
−
==
ϕ
ϕ
=1323.0
0723.0
0390.0
2351.0
1910.0
2056.0
FK
V
U
V
U
rsr
100k3
3
3
2
2
2
; [ ]
−
−
−
−
−
−
==
ϕ
ϕ
=1308.0
0713.0
0411.0
2340.0
1904.0
2064.0
FK
V
U
V
U
rsr
10k3
3
3
2
2
2
8
.
Pentru k=100 numărul de condiŃionare al matricei de rigiditate este aproximativ 193.5, iar pentru k=108 este 1.74 810⋅ . ReacŃiunile în reazemul modelat prin arc se pot obŃine din
[ ]
ϕ
=
3
3
3
arc
3Z
3Y
3X
V
U
K
M
F
F
.
Această metodă a introducerii unor elemente de rigiditate mare, pentru a modela diverse condiŃii la limită, este în esenŃă metoda funcŃiei de penalizare.
Model 3. Problema din figura 13.2 poate fi abordată şi prin utilizarea unui sistem de coordonate nodal (fig. 13.2.e). Adică, fiecare nod are asociat un sistem de refererinŃă propriu; în acest caz, nodul 2 prezintă sistemul de referinŃă global, iar nodul 3 sistemul de referinŃă pentru care direcŃia de deplasare a reazemului coincide cu axa locală x nodului. Matricea de transformare a coordonatelor între sistemul de referinŃă al nodurilor şi sistemul global de referinŃă este
2 3 1 0 0 0 0 0 0 1 0 0 0 0
0 0 1 0 0 0
2
[ ]RotT = 0 0 0 0.500 -0.866 0
0 0 0 0.866 0.500 0 0 0 0 0 0 1
3
iar matricea de rigiditate a structurii în coordonate nodale devine
2 3 13 0 -6 -6 10.3923 -6 0 13 -6 -0.8660 -0.5000 0
-6 -6 8 3 -5.1962 2
2
. [ ] [ ] [ ][ ]RotT
RotRotr TKTK = =
-6 -0.8660 3 3.7500 -4.7631 3 10.3923 -0.5000 -5.1962 -4.7631 9.2500 -5.1962 -6 0 2 3 -5.1962 4
3

Impunerea condiŃiei în reazem se transformă în 0vn3 = şi se reflectă prin "tăierea" liniei şi a
coloanei înegrite din expresia matricei de rigiditate în coordonate nodale [ ]RotrK . Rezultă, deplasările
în coordonate nodale
−
−
−
−
−
=
−
−
−−
−−
−−
−−−
=
ϕ
ϕ
−
1308.0
0823.0
2340.0
1904.0
2064.0
0
0
0
1
0
43206
37500.338660.06
23866
08660.06130
666013
u
V
U1
3
n3
2
2
2
.
Pentru a obŃine deplasările în coordonate globale se "schimbă" sistemul de referinŃă, adică
[ ]
−
−
−
−
−
−
=
ϕ
ϕ=
ϕ
ϕ
1308.0
0713.0
0411.0
2340.0
1904.0
2064.0
v
u
V
U
T
V
U
V
U
3
n3
n3
2
2
2
Rot
3
3
3
2
2
2
.
ForŃele din noduri, în coordonate nodale, sunt
[ ]
−
=
ϕ
ϕ=
0
2383.0
0
0
1
0
v
u
V
U
K
M
F
F
M
F
F
3
n3y
n3x
2
2
2
Rotr
2Z
n3y
n3x
2Z
2Y
2X
,
iar în coordonate globale rezultă
[ ]
−
−
=
=
0
1192.0
2064.0
0
1
0
M
F
F
M
F
F
T
M
F
F
M
F
F
2Z
n3y
n3x
2Z
2Y
2X
Rot
2Z
3Y
3X
2Z
2Y
2X
.
Exemplul 3. Modelarea articulaŃiilor intermediare. Se consideră o grinda în plan, cu
articulaŃie intermediară (fig. 13.3.a), formată din două elemente BEAM2D. Se consideră =ℓ 1; E = 1; I = 1; F = 1. Se cer deplasările şi rotirile nodale.
Deoarece nu interesează deplasările axiale (sunt nule), se consideră două grade de libertate în fiecare nod, adică translaŃia pe verticală şi rotirea în jurul axei Z. Mai mult, matricele de rigiditate ale elementelor în coordonate locale coincid cu cele în coordonate globale.

Figura 13.3
Model 1. Se face discretizarea din figura 13.3.b, în care articulaŃia intermediară se consideră, pentru început, separată în două noduri distincte, cu aceleaşi coordonate, iar apoi se introduce o legătură cinematică între gradele de libertate ale acestor două noduri.
Matricele de rigiditate ale elementelor sunt
[ ]
−
−−−
−
−
=
4626
612612
2646
612612
K1 ; [ ]
−
−−−
−
−
=
25.115.1
5.15.15.15.1
15.125.1
5.15.15.15.1
K 2 .
A. Pentru metoda de eliminare rezultă matricea de rigiditate a structurii, cu condiŃiile la limită impuse 0vv 411 ==ϕ= :
[ ]
−
−
=
215.100
125.100
5.15.15.100
00046
000612
K .
Deoarece 32 vv = , matricea de transformare pentru eliminarea relaŃiei de legătură [ ]CT , rezultă
din
[ ]
ϕ
ϕ
ϕ=
ϕ
ϕ
ϕ
=
ϕ
ϕ
ϕ
4
3
2
2
C
4
3
2
2
4
3
3
2
2v
T
v
1000
0100
0001
0010
0001
v
v
,
iar matricea de rigiditate a structurii cu relaŃia de legătură impusă este

[ ] [ ] [ ][ ]
−
−
==
2105.1
1205.1
0046
5.15.165.13
TKTK CT
Cr .
Vectorul încărcărilor nodale ale structurii şi vectorul redus al încărcărilor, rezultă
−
=
0
0
0
0
1
F ; [ ]
−
==
0
0
0
1
FTF TCr .
Deplasările nodale se obŃin din
[ ]
−
−
==
ϕ
ϕ
ϕ−
1667.0
1667.0
5.0
3333.0
FK
v
r1
r
4
3
2
2
.
B. Dacă se lucrează cu metoda multiplicatorilor Lagrange, atunci calculul decurge astfel: i. se scrie matricea
[ ] [ ]00101C −= ;
ii. se formează matricea de rigiditate extinsă [ ]LK şi vectorul încărcărilor LF , care include şi multiplicatorii Lagrange
[ ]
−
−
−
−
=
000101
0215.100
0125.100
15.15.15.100
000046
1000612
KL ;
−
=
0
0
0
0
0
1
FL ;
iii. se rezolvă sistemul [ ] LLL FUK = şi rezultă
[ ]
−
−
−
==
λ
ϕ
ϕ
ϕ
−
0
1667.0
1667.0
3333.0
5.0
3333.0
FKv
v
L1
L
4
3
3
2
2
.
C. Dacă se doreşte rezolvarea problemei folosind funcŃiile de penalizare, se procedează astfel: i. se alege matricea [ ]α , în cazul de faŃă constanta 100=α (de exemplu); ii. se determină matricea de penalizare

[ ] [ ] [ ]
−
−
=α=
00000
00000
001000100
00000
001000100
CCK Tp ,
care coincide cu matricea de rigiditate expandată a unui arc de rigiditate α=k , montat între nodurile 2 şi 3 şi care arată că din punctul de vedere al modelării, introducerea unui arc pe direcŃie verticală, între nodurile 2 şi 3 este echivalentă cu metoda funcŃiei de penalizare; iii. se determină matricea de rigiditate "penalizată" [ ]Str,PK , care include şi matricea de penalizare
[ ] [ ] [ ]
−
−
−−
=+=
215.100
125.100
5.15.15.1010100
00046
001006112
KKK pStr,P ;
iv. se obŃin deplasările nodale
[ ]
−
−
−
==
ϕ
ϕ
ϕ
−
1667.0
1667.0
3333.0
5.0
3333.0
FKv
v
1Str,P
4
3
3
2
2
.
Model 2. O altă posibilitate de modelare a articulaŃiei intermediare este folosirea condensării
statice a gradelor de libertate rotiri, pentru cel puŃin un element care participă la asamblare în nodul articulaŃiei. Astfel, dacă discretizarea se face cu un nod comun, ca în figura 13.3.c, trebuie să se facă distincŃie între rotirea elementului 1 şi 2, din nodul comun 2. Deoarece pentru această aplicaŃie un nod are două grade de libertate, rezultă că nu se poate obŃine direct decât maxim o rotire a unui element în nodul 2. Aceasta poate fi rotirea elementului 1 - 1
2ϕ , sau rotirea elementului 2 - 22ϕ ,
funcŃie de care matrice de rigiditate se condensează pentru a nu transmite rigiditate de încovoiere în nodul 2. Condensarea statică a fost prezentată în capitolul 4.
Matricele de rigiditate ale celor două elemente, cu gradele de libertate rotiri din nodul 2 condensate static, sunt
[ ]
−−
−
−
=
0000
0333
0333
0333
K1c ; [ ]
−
−−
−
=
5.175.0075.0
75.0375.00375.0
0000
75.0375.00375.0
K 2c .
Condensarea statică este un procedeu de eliminare Gauss a unor linii din matricea de rigiditate a elementului. Pentru a obŃine prima matrice se procedează astfel: i. se partiŃionează ecuaŃia de echilibru a elementului 1 în forma
[ ]
=
b
a
b
a
bbba
abaa
F
F
U
U
KK
KK;

ii. din a doua ecuaŃie, în care 0Fb = , rezultă aba1
bbb UKKU −−= , care înlocuită în prima ecuaŃie,
simultan cu completarea liniei şi coloanei a patra cu zero, conduce la matricea condensată
[ ] ( )
=
−+ −
0
F
U
U
00
0KKKK a
b
aba1
bbabaa,
sau, explicit, matricea elementului partiŃionată este
12 6 -12 6 1v 1F 6 4 -6 2 1ϕ 1M -12 -6 12 -6
2v 2F
6 2 -6 4
×
12ϕ
=
0
.
Dacă se are în vedere condensarea elementului 2, pentru rearanjarea matricei în forma de mai sus se poate face o permutare a gradelor de libertate. Pentru acest caz matricea de permutare şi relaŃia de rearanjare sunt
[ ]
=
0100
0010
1000
0001
P ; [ ] [ ] [ ] [ ]PKPK 2T2Perm = .
Dacă se condensează matricea elementului 1 şi se asamblează cu matricea elementului 2 necondensat, în urma impunerii condiŃiilor la limită, rezultă ecuaŃia
−
=
ϕ
ϕ
0
0
1v
215.1
125.1
5.15.15.4
3
22
2
,
din care se obŃine
−
=
ϕ
ϕ
1667.0
1667.0
3333.0v
3
22
2
.
Este de menŃionat că se poate proceda şi la condensarea elementului 2 şi asamblarea cu elementul 1 necondensat, sau se pot condensa ambele elemente în nodul 2. Dacă se condensează ambele elemente, în urma asamblării şi a impunerii condiŃiilor la limită, rezultă
−
=
ϕ
0
0
1
0
v
5.1075.0
000
75.00375.3
3
2
,
iar prin eliminarea liniei şi coloanei cu zerouri, rezultă un sistem de ecuaŃii determinat, care conduce la soluŃiile
−
=
ϕ 1667.0
3333.0v
3
2.
Exemplul 4. Cuplare cinematică la o grindă. Grinda în consolă din figura 13.4.a este astfel
realizată (cuplată cinematic) încât nodurile 2 şi 3, indiferent de încărcare, au aceeaşi deplasare v, pe direcŃie verticală. Ştiind că =ℓ 0.5; E = 1; I = 0.25; F = 1, se cere valoarea deplasării v, precum şi valorile forŃelor care asigură condiŃia cinematică impusă.

Figura 13.4
Deoarece nu interesează deplasările pe orizontală, fiecare nod are două grade de libertate, adică
deplasarea pe verticală şi rotirea în planul grinzii. Pentru discretizarea din figura 13.4.b, matricele de rigiditate ale elementelor în coordonate globale sunt
[ ] [ ]
−
−−−
−
−
==
2616
624624
1626
624624
KK 21 .
Matricea de rigiditate globală a structurii [K], cu blocajele impuse în nodul 1, satisface ecuaŃia [ ] FUK = , adică
=
ϕ
ϕ
−
−−−
−
−
0
1
0
0
v
v
2616
624624
1640
624048
3
3
2
2
,
dar, în plus, trebuie să satisfacă şi restricŃia 32 vv = .
A. Dacă se alege metoda eliminării pentru a rezolva sistemul de ecuaŃii cu restricŃii, se scrie matricea de transformare [T], care rezultă din exprimarea [ ] rUTU = , adică
[ ]
ϕ
ϕ=
ϕ
ϕ
=
ϕ
ϕ
3
2
2
3
2
2
3
3
2
2v
T
v
100
001
010
001
v
v
.
Matricea redusă şi vectorul redus al încărcărilor rezultă din
[ ] [ ] [ ] [ ]
−
−
==
210
146
0624
TKTK Tr ; [ ]
==
0
0
1
FTF Tr .
Deplasările necunoscute rezultă

[ ]
−
==
ϕ
ϕ=−
0625.0
125.0
0729.0
FK
v
U r1
r
3
2
2
r ,
iar vectorul total al deplasărilor este
[ ]
−
==
0625.0
0729.0
125.0
0729.0
UTU r .
EcuaŃia globală de echilibru este perturbată de prezenŃa restricŃiei, astfel încât forŃele care asigură deplasările precedente (fig. 13.4.c) rezultă din
[ ]
−==
=
0
375.0
0
375.1
UK
M
F
M
F
F
3
3
2
2
R .
Deci, pentru a satisface restricŃia impusă, faŃă de sistemul iniŃial de forŃe F, în structură se induce un sistem de forŃe suplimentar SF , astfel încât SR FFF += . Sistemul de forŃe suplimentar este
−=−=
0
375.1
0
375.1
FFF RS .
În concluzie, prezenŃa unor restricŃii de genul celei prezentate, conduce la o redistribuire a forŃelor în sistem, astfel încât aceste restricŃii să poată fi satisfăcute. ForŃa F = 1 introdusă în nodul 3 trebuie privită ca forŃa rezultantă care lucrează în nodurile cuplate 2 şi 3, adică 1FFF 32 ==+ .
În practică asemenea situaŃii sunt des întâlnite. În figura 13.5 se prezintă modelulul plan al unui cilindru în contact cu alt cilindru (sau, sistemelor, sferă pe sferă), pentru care se analizează distribuŃia tensiunilor în zona contactului dintre cilindri. Din motive de simetrie, este discretizat doar un sfert din fiecare cilindru. CondiŃiile de încărcare cu forŃe în nodurile de pe axa AB sunt dificil de stabilit, întrucât nu se cunoaşte distribuŃia acestora. Dacă toate nodurile de pe această axă sunt obligate să prezinte aceeaşi deplasare pe verticală (adică se impun restricŃii, sau în limbajul uzual al MEF, cuplaje), este suficient ca forŃa totală să fie aplicată într-un singur nod. Similar, se întâmplă cu placa în consolă din figura 13.6, supusă la încovoiere pură. Dacă aceasta se discretizează cu elemente de tip SHELL cu opt noduri, este dificil de a distribui momentul M în cele trei noduri din capătul liber al plăcii, astfel încât rotirile din aceste noduri să rezulte egale, aşa cum este normal. Impunerea condiŃiilor de cuplare a rotirilor pentru aceste trei noduri şi aplicarea momentului într-un singur nod, rezolvă această problemă.

Figura 13.5
Figura 13.6
Exemplul 5. Modelarea elementelor rigide. Se consideră structura formată din două grinzi identice, conectate rigid, ca în figura 13.7.a, pentru care, pentru simplificarea calculului, se consideră =ℓ 1; a = 0.5; E = 1; A = 1; I = 1; =ρ 420; F = 1. Se cer deplasările nodale, pentru încărcarea statică şi frecvenŃele proprii ale structurii.
Figura 13.7
Model 1. Cea mai simplă cale de a modela această structură, este de a considera elementul rigid cu proprietăŃi elastice mult ridicate (de exemplu, se pot alege valori obişnuite ale caracteristicilor geometrice ale secŃiunii barelor, şi materialul să se considere mult mai rigid, E=106 şi fără masă ρ =0). Această situaŃie nu include ecuaŃii suplimentare de restricŃii ale deplasărilor, deoarece elementul de grindă care modelează elementul rigid, simulează practic îmbinarea rigidă. Pentru numerotarea nodurilor şi a elementelor din figura 13.7.b, se obŃin următoarele matrice de rigiditate şi masă pentru structură (valorile care conŃin factorul 106 sunt puŃin mai mari, deoarece conŃin şi informaŃiile din matricele elementelor de grindă 1 şi 2)

2 3 4 96 610⋅ 0 -24 610⋅ 0 0 0 -96 610⋅ 0 -24 610⋅ 0 2 610⋅ -6 0 0 0 0 -2 610⋅ 0 -24 610⋅ -6 8 610⋅ 0 0 0 24 610⋅ 0 4 610⋅
2
0 0 0 1 0 0 -1 0 0 0 0 0 0 12 -6 0 -12 -6
[ ]K =
0 0 0 0 -6 4 0 6 2
3
-96 610⋅ 0 24 610⋅ -1 0 0 96 610⋅ 0 24 610⋅ 0 -2 610⋅ 0 0 -12 6 0 2 610⋅ 6 -24 610⋅ 0 4 610⋅ 0 -6 2 24 610⋅ 6 8 610⋅
4
2 3 4
140 0 0 0 0 0 0 0 0 0 156 -22 0 0 0 0 0 0 0 -22 4 0 0 0 0 0 0
2
0 0 0 140 0 0 70 0 0 0 0 0 0 156 -22 0 54 13
[ ]coerM =
0 0 0 0 -22 4 0 -13 -3
3
0 0 0 70 0 0 140 0 0 0 0 0 0 54 -13 0 156 22 0 0 0 0 13 -3 0 22 4
4
2 3 4
210 0 0 0 0 0 0 0 0 0 210 0 0 0 0 0 0 0 0 0 17.5 0 0 0 0 0 0
2
0 0 0 210 0 0 0 0 0 0 0 0 0 210 0 0 0 0
[ ]diagM =
0 0 0 0 0 17.5 0 0 0
3
0 0 0 0 0 0 210 0 0 0 0 0 0 0 0 0 210 0 0 0 0 0 0 0 0 0 17.5
4
Model 2. A doua posibilitate de modelare, constă în introducerea relaŃiilor de restricŃie între
nodurile conectate de elementul rigid. Pentru numerotarea nodurilor şi a elementelor ca în figura 13.7.c, aceste relaŃii sunt
ϕ=ϕ
=
ϕ−=
24
24
224
vv
auu
,
şi conduc la matricea
[ ]
−
−
−−
=
100000100
010000010
0010005.001
C ,
în care gradele de libertate corespunzătoare nodului 4 sunt dependente (se elimină). Matricele de masă pentru structura asamblată (cu condiŃiile la limită impuse în nodul 1) sunt cele corespunzătoare modelului 1 deoarece elementul rigid a fost considerat fără masă, iar matricea de rigiditate este

2 3 4 1 0 0 0 0 0 0 0 0 0 12 -6 0 0 0 0 0 0 0 -6 4 0 0 0 0 0 0
2
0 0 0 1 0 0 -1 0 0 0 0 0 0 12 -6 0 -12 -6
[ ]K =
0 0 0 0 -6 4 0 6 2
3 .
0 0 0 -1 0 0 1 0 0 0 0 0 0 -12 6 0 12 6 0 0 0 0 -6 2 0 6 4
4
A. Dacă metoda de rezolvare este eliminarea directă a restricŃiilor, atunci matricea de transformare rezultă
2 3 1 0 0 0 0 0 0 1 0 0 0 0 0 0 1 0 0 0
2
0 0 0 1 0 0 0 0 0 0 1 0
[T]=
0 0 0 0 0 1
3 ,
1 0 -0.5 0 0 0 0 1 0 0 0 0 0 0 1 0 0 0
4
iar matricele de rigiditate şi masă reduse rezultă 2 3
2 0 -0.5 -1 0 0 0 24 0 0 -12 6
-0.5 0 8.25 0.5 -6 2
2
[ ]rK = -1 0 0.5 1 0 0
0 -12 -6 0 12 -6 0 6 2 0 -6 4
3
2 3
280 0 -70 70 0 0 0 312 0 0 54 -13
-70 0 43 -35 13 -3
2
[ ]coer,rM = 70 0 -35 140 0 0
0 54 13 0 156 -22 0 -13 -3 0 -22 4
3
2 3
420 0 -105 0 0 0 0 420 0 0 0 0
-105 0 87.5 0 0 0
2
[ ]diag,rM = 0 0 0 210 0 0
0 0 0 0 210 0 0 0 0 0 0 17.5
3
Vectorul redus al încărcărilor nodale rezultă T
r 015000F = . B. Dacă se alege metoda Lagrange, atunci soluŃiile se obŃin din considerarea matricelor de rigiditate şi masă împreună cu restricŃiile şi rezultă, matricele extinse

2 3 4 mult. lagr. (ml)
1 0 0 0 0 0 0 0 0 1 0 0 0 12 -6 0 0 0 0 0 0 0 1 0 0 -6 4 0 0 0 0 0 0 -0.5 0 1
2
0 0 0 1 0 0 -1 0 0 0 0 0 0 0 0 0 12 -6 0 -12 -6 0 0 0
0 0 0 0 -6 4 0 6 2 0 0 0
3
; [ ]LagrK = 0 0 0 -1 0 0 1 0 0 -1 0 0
0 0 0 0 -12 6 0 12 6 0 -1 0 0 0 0 0 -6 2 0 6 4 0 0 -1
4
1 0 -0.5 0 0 0 -1 0 0 0 0 0 0 1 0 0 0 0 0 -1 0 0 0 0 0 0 1 0 0 0 0 0 -1 0 0 0
ml
2 3 4 mult. lagr. (ml)
140 0 0 0 0 0 0 0 0 0 0 0 0 156 -22 0 0 0 0 0 0 0 0 0 0 -22 4 0 0 0 0 0 0 0 0 0
2
0 0 0 140 0 0 70 0 0 0 0 0 0 0 0 0 156 -22 0 54 13 0 0 0
0 0 0 0 -22 4 0 -13 -3 0 0 0
3
. [ ]coerLagrM =
0 0 0 70 0 0 140 0 0 0 0 0 0 0 0 0 54 -13 0 156 22 0 0 0 0 0 0 0 13 -3 0 22 4 0 0 0
4
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
ml
C. Pentru metoda funcŃiei de penalizare, se poate alege
[ ]
=α
100
010
001
k .
Dacă k=100, atunci 2 3 4
100 0 -50 0 0 0 -100 0 0 0 100 0 0 0 0 0 -100 0 -50 0 125 0 0 0 50 0 -100
2
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
[ ] [ ] [ ] [ ]CCK Tp α= =
0 0 0 0 0 0 0 0 0
3 .
-100 0 50 0 0 0 100 0 0 0 -100 0 0 0 0 0 100 0 0 0 -100 0 0 0 0 0 100
4
SoluŃiile problemei sunt prezentate în tabelul 13.1, pentru analiza statică şi în tabelul 13.2, pentru
analiza modală. În tabelul 13.3 se dă numărul de condiŃionare a matricei de rigiditate, sau a matricei care trebuie inversată, pentru obŃinerea soluŃiei.

Tabelul 13.1 Model 2
Metoda de rezolvare FuncŃii de penalizare
D e p l.
Model 1
Eliminare şi Lagrange k=102 k=106 k=1012 k=1015
2u 5.0000 5.0000 5.0000 5.0000 4.9994 5.7143
2v -0.4167 -0.4167 -0.4167 -0.4167 -0.4167 -0.4015
2ϕ -1.0000 -1.0000 -1.0000 -1.0000 -1.0000 -0.9697
3u 10.5000 10.5000 10.5500 10.5000 10.4994 11.1991
3v -1.0833 -1.0833 -1.0633 -1.0833 -1.0834 -1.0379
3ϕ -0.5000 -0.5000 -0.4900 -0.5000 -0.5000 -0.4697
4u 5.5000 5.5000 5.5500 5.5000 5.4994 6.1991
4v -0.4167 -0.4167 -0.4067 -0.4167 -0.4167 -0.4015
4ϕ -1.0000 -1.0000 -0.9900 -1.0000 -1.0000 -0.9697
Tabelul 13.2
Matrice de masă coerentă Matrice de masă diagonală FrecvenŃa proprie
310× Model 1 Model 2 Model 1 Model 2
f1 5.4002 5.4002 5.0353 5.2695 f2 7.7243 7.7243 6.7930 6.3238 f3 21.8238 21.8238 14.3534 14.3921 f4 43.0812 43.0812 28.0048 27.9234 f5 95.3720 95.3720 53.8346 47.0384 f6 330.2269 330.2269 91.2475 89.7050
Tabelul 13.3
Model 2
Metoda de rezolvare Penalizare
Model 1
Elimi-nare
Lagrange k=102 k=106 k=1012 k=1015
Numărul de condiŃionare al matricei care se
"inversează"
1.47 910⋅ 195.65 227.47 1.93 310⋅ 1.90 710⋅ 1.9 1310⋅ 2.2 1610⋅ În concluzie, Ńinând seama de exemplele prezentate, analiza statică conduce la rezultate "corecte" din punctul de vedere a metodei de abordare a problemei cu restricŃii, indiferent de metoda aleasă, cu excepŃia metodei funcŃiei de penalizare, care poate da rezultate eronate, dacă matricea [ ]α nu este bine aleasă. Analiza modală prezintă dificultăŃi dacă se lucrează cu matrice de masă diagonale. Atât metoda eliminării cât şi metoda multiplicatorilor Lagrange, se pot utiliza în această opŃiune, cu menŃiunea că odată distrus caracterul matricei de masă diagonale, aceasta se utilizează, în continuare, prin neglijarea tuturor termenilor din afara diagonalei principale. Modelul 1, al aplicaŃiei din exemplul 5, este, practic, un caz particular al metodei funcŃiei de penalizare. Numărul de condiŃionare a matricei de rigiditate (sau a matricei care se inversează) este o măsură a "calităŃii" soluŃiilor obŃinute. Acest număr este de dorit a fi cât mai mic, pentru a înlătura problemele numerice de rezolvare a sistemului de ecuaŃii, dar în aceste condiŃii nu se asigură precizia soluŃiei.
În practică sunt numeroase cazurile când se impune folosirea ecuaŃiilor de legătură sau de cuplare între anumite componente pe direcŃiile gradelor de libertate ale unor mărimi nodale. Spre exemplu,

structura din figura 13.8 este realizată constructiv din Ńevi care sunt prinse între ele cu şuruburi, prin intermediul a 12 piese identice [2]. Aceste piese sunt la rândul lor formate din trei table găurite, fixate între ele tot cu şuruburi (fig. 13.9). Pentru o analiză statică a structurii s-a utilizat un model din bare şi plăci, ca în figura 13.9.a. Acest model Ńine seama de rigidităŃile celor 12 piese de legătură, precum şi de excentricităŃile punctelor de prindere. Pentru a realiza legătura dintre găurile din plăci şi elementele de bară, au fost modelate toate şuruburile de prindere ca bare scurte. Între fiecare nod al barei care modelează şurubul şi se află în planul median al unei table din piesa de prindere şi nodurile de pe conturul găurii în care se introduce şurubul (vezi fig. 13.9.b), au fost definite legături rigide, folosind ecuaŃii de legătură între gradele de libertate.
Figura 13.8
Modelul cu elemente finite are 4406 elemente de grindă şi placă (SHELL) cu patru noduri, şi 6826 de noduri. Numărul total al ecuaŃiilor de legătură a fost 11520, ceea ce reprezintă circa 28 % din numărul total al gradelor de libertate.
a. b.
Figura 13.9
Discretizarea adaptivă

Indiferent de modul de calcul al tensiunilor în noduri, între elementele vecine apar discontinuităŃi ale lor. Acestea provin, în general, din slabele performanŃe ale elementelor finite model deplasare, pentru care continuitatea tensiunilor nu este controlată, încă din faza de formulare a teoriei MEF. Pentru a "forŃa" continuitatea tensiunilor între elementele vecine, o cale simplă şi foarte des utilizată este de a media, într-un fel anume tensiunile între elemente care au noduri comune. Cea mai simplă tehnică este folosirea mediei aritmetice.
Dacă într-un nod n (fig. 13.10) există eN,,1i …= elemente
adiacente, atunci se consideră că tensiunea medie în acel nod este
Figura 13.10
e
N
1i
in
mn N
e
∑=
σ
=σ .
(13.28)
Dacă discretizarea unui model se îmbunătăŃeşte prin creşterea numărului de elemente, atunci, tensiunile pe fiecare element tind spre starea de tensiune constantă şi practic aceste discontinuităŃi dispar. Plecând de la această observaŃie, rezultă că o continuitate a tensiunilor între elemente este o măsură a calităŃii discretizării, iar discontinuitatea tensiunilor semnalează o deficienŃă a acesteia. Discontinuitatea tensiunilor este funcŃie de tipul elementului folosit în discretizarea modelului, de gradienŃii stărilor de deplasări şi tensiuni ai structurii şi de condiŃiile la limită ale problemei (încărcare). Dacă se alege un tip de element finit şi un caz de încărcare pentru un model dat, se obŃin tensiunile în elemente, iar discontinuitatea lor în noduri poate defini o mărime globală, la nivelul întregului model (sau doar pe o porŃiune din model), numită eroare de discontinuitate a
tensiunilor ("percentage error in energy norm"). Această mărime are o formulare energetică intuitivă. Dacă se acceptă că eroarea tensiunii în nodul n, pentru elementul i este
in
mn
in σ−σ=σ∆ , (13.29)
şi dacă elementul finit i are un număr total de noduri conectate cu alte elemente Nc , atunci se poate defini convenŃional eroarea energiei potenŃiale în elementul i, prin relaŃia integrală
[ ] dVD2
1e
V
1Ti σ∆σ∆= ∫
− ,
(13.30)
în care prin σ∆ se înŃelege relaŃia (13.29) pentru toate cele Nc noduri din elementul i şi [D] este matricea de rigiditate a materialului (3.22). Eroarea energiei potenŃiale pentru modelul considerat, care are un număr total de elemente NE, este
∑=
=NE
1iiee .
(13.31)
Dacă energia potenŃială totală a modelului U, pentru analiza respectivă, este
∑=
=NE
1e
eUU ; [ ] eeTee uku2
1U = ,
(13.32)
atunci eroarea de discontinuitate a tensiunilor, se defineşte procentual, astfel

eU
e100E
+= .
(13.33)
Un model pentru care ie este constant (erorile sunt echilibrate) pentru toate elementele, este foarte eficient din punctul de vedere al analizei respective. În practică, mărimea globală E poate fi un indicator de eficienŃă a discretizării respective. Plecând de la relaŃiile definite anterior, este util uneori a estima o serie de mărimi "tensiuni", care dau informaŃii preŃioase asupra valorilor "posibile", maxime sau minime, în modelul de calcul, Ńinând seama de "deviaŃiile" tensiunilor în noduri. Astfel, pentru o componentă oarecare jσ a
tensiunii din vectorul tensiunilor σ , sau chiar pentru o altă tensiune (echivalentă de exemplu), se pot estima valorile nodale extreme, prin
( )nm
n,jn
minj min σ∆−σ=σ ; (13.34)
( )nm
n,jn
maxj max σ∆+σ=σ , (13.35)
în care
( )
e
N
1i
2i
n N
e
∑=
σ∆
=σ∆ ;
(13.36)
iar iσ∆ este maximumul absolut din componenta vectorului inσ∆ , pentru toate nodurile conectate
la elementul i. Pe baza indicatorului E, unele programe cu elemente finite au implementat proceduri de discretizare adaptivă. Adică, dacă o primă discretizare prezintă E > 5 % (spre exemplu), discretizarea se reface automat în zona în care σ∆ este mare şi se reia calculul până când E coboară sub o valoare impusă. Discretizarea adaptivă, de obicei, conduce la rafinarea discretizării, dacă tipul de element finit folosit pentru discretizare se păstrează. Această metodă poartă denumirea de tehnica h, (de la dimensiunea elementului finit, care, de obicei, se notează cu h). Creşterea preciziei unei analize şi respectiv scăderea discontinuităŃii tensiunilor în noduri, se poate obŃine şi prin folosirea elementelor finite cu polinoame de interpolare de grad superior. Dacă se menŃine discretizarea şi se creşte progresiv gradul polinoamelor de interpolare ale elementelor (deci se introduc noduri suplimentare în discretizarea iniŃială, fără însă a modifica forma iniŃială a elementelor) se spune că se foloseşte tehnica p (de la polinomul de interpolare). Pentru o eventuală combinare ale acestor două tehnici se poate vorbi de tehnica h-p. De obicei, gradul maxim al polinoamelor de interpolare implementat în programe este limitat (8, max. 10), astfel că la limită, valoarea indicatorului E nu poate să fie oricât de mică, în cazul folosirii acestei tehnici. Nici tehnica h nu conduce la indicatori de eroare foarte mici, deoarece dimensiunea elementelor finite nu poate tinde la zero (unele programe verifică dacă dimensiunile elementelor sunt mai mici decât o anumită limită). În figura 13.11.a se prezintă modelul unui sfert al unei membrane găurite, solicitată la întindere pe direcŃie orizontală, discretizată cu 35 de elemente Q6, pentru care E = 17.2 %. Prin procedeul h, se ajunge la discretizarea cu 152 de elemente din figura 13.11.b, pentru care E = 7.5 %.
Dacă se adoptă discretizarea cu 16 elemente din figura 13.11.c, pentru polinoame de interpolare de ordinul 2, indicele E < 5%, iar pentru polinoame de interpolare de ordinul 3, indicele E < 0.1 %.

a. b. c.
Figura 13.11
În cazul prezentat, tensiunea maximă este în elementul marcat înegrit în figura 13.11, chiar în nodul care nu aparŃine decât unui singur element. Deci dacă scopul utilizării metodelor de discretizare adaptivă este estimarea cât mai precisă a tensiunilor în acest punct, se face o eroare de interpretare a indicelui E. Precizia de estimare a tensiunii în acest nod creşte, dar nu din considerente de discontinuitate a tensiunilor în acest nod ci din nodurile vecine.
Bibliografie
1. Cook R.D., Malkus D.S., Plesha M.E., Concepts and Applications of Finite Element Analysis, John Wiley & Sons, University of Wisconsin-Madison, Third Edition, 1989.
2. Sandu Adriana, Sorohan Şt., On the modeling of modular bars structures using finite element
analysis, The 9-th International Symposium on Experimental Stress Analysis and Material Testing, Bucureşti - ConstanŃa, pag. 164-170, 2002.

10.
MODELUL CONCEPTUAL ŞI IMPORTANłA SA ÎN INGINERIA ASISTATĂ
NoŃiuni de teoria modelării
Elaborarea unui model este primul demers în încercarea de abstractizare legată de un fenomen real observabil, de elaborare a unei teorii care să-l explice şi să-i anticipeze evoluŃia. Modelele utilizate în ştiinŃă şi în tehnică sunt sisteme teoretice (logic – matematice) sau materiale
cu ajutorul cărora pot fi studiate indirect proprietăŃile, comportarea în anumite condiŃii date şi transformările unor alte sisteme mai complexe, denumite sisteme originale, cu care modelele au anumite asemănări, analogii sau similitudini. Modelul reprezintă o simplificare, o reflectare numai parŃială a fenomenului sau obiectului original, neglijâdu-se anumite laturi neesenŃiale pentru studiul căruia îi este destinat, cu scopul de a oferi un instrument mai accesibil investigaŃiei teoretice şi (sau) experimentale. Modelele pot fi teoretice (ideale) când sunt construcŃii sau reprezentări logic – matematice, ca de exemplu modelele atomului, modelele cosmologice, modele de calcul etc, sau materiale, ca de exemplu macheta unei nave, un calculator analogic sau numeric etc. Modelele teoretice sunt o verigă intermediară între experienŃă şi teoria propriu-zisă, cuprinzătoare şi exactă a sistemului studiat, reprezentând un mijloc de verificare a ipotezelor enunŃate la elaborarea teoriei. Modelele teoretice sunt adesea ansambluri de ipoteze formulate pe baza analogiei, presupuse, cu un sistem a cărui teorie este, în esenŃă, cunoscută; din aceste ipoteze pot fi deduse consecinŃe verificabile experimental. Adesea sunt utilizate modele intuitive, care facilitează interpretarea teoriei şi raportarea ei la obiectul real. Modelele materiale permit abordarea pe cale experimentală a unor probleme care nu pot fi rezolvate pe cale analitică, fie pentru că nu există metode de calcul adecvate, fie că metodele existente sunt prea laborioase şi costisitoare. Ele pot fi de aceeaşi natură fizică cu sistemele originale – modele prin similitudine – fiind diferite de acestea prin ordinul de mărime al dimensiunilor şi al valorilor caracteristice (de exemplu, constantele fizice ale materialeleor folosite). Modelele pot fi şi de altă natură fizică decât sistemele originale – modele prin analogie - caracterizate prin ecuaŃii matematice de aceeşi formă cu cele ale sistemelor pe care le modelează. Utilizarea modelării în cele mai variate domenii ale ştiinŃei şi tehnicii s-a dovedit deosebit de fructuoasă şi eficientă, căpătând o extindere spectaculoasă în ultimele decenii, ca urmare a aportului adus de electronică în toate tipurile de procese de modelare. Mai mult decât atât, apariŃia şi dezvoltarea ciberneticii, informaticii şi calculatoarelor electronice au dus la un proces de unificare a modelării, analogiei, similitudinii şi simulării într-un sistem integrat, cu performanŃe remarcabile şi eficienŃă ridicată. Calculatoarele sunt de fapt modele: cele analogice sunt modele ale unor relaŃii matematice, iar cele numerice ale unor algoritmi. În urmă cu câteva decenii, calculatorele analogice şi cele numerice se dezvoltau în paralel, oarecum independent. Modelarea pe calculatoare analogice avea însă un neajuns: pentru fiecare tip de problemă era necesară realizarea unui alt model. În prezent acest neajuns s-a înlăturat ca urmare a utilizării unor algoritmi adecvaŃi, care permit simularea pe calculatorul numeric a modelelor analogice, în acest fel calculatorul numeric devenind universal. În numeroase domenii ale ştiinŃei şi ingineriei se utilizează tot mai mult sisteme complexe, interactive de modelare experimentală şi prin calcul. De exemplu, un model (sau un ansamblu de mai multe modele) al unei structuri este investigat prin una din metodele cunoscute: tensometrie electrică rezistivă, fotoelasticitate, interferometrie holografică. InformaŃiile furnizate de determinările experimentale sunt convertite – de către un convertor analog numeric – în informaŃii numerice, care se

introduc într-un calculator, pe care, simultan cu investigaŃia experimentală, se execută calculele corespunzătore unui model de calcul al aceleaşi structuri. Din confruntarea informaŃiilor obŃinute prin cele două căi de investigare se formuleză decizii, care duc la perfecŃionarea modelului experimental, al celui de calcul şi al structurii care se studiază. Procesul continuă până când se elaborează configuraŃia optimă a structurii respective. Elaborarea unui model corect şi eficient al unui sistem original reprezintă o sinteză a tot ceea ce se ştie despre acel sistem. Paradoxal este faptul că, pentru a modela corec un fenomen, este necesară cunoaşterea cât mai cuprinzătoare a sa, ceea ce este în opoziŃie cu nevoia de a-l cerceta. De asemenea modelul trebuie să fie adecvat scopului urmărit. Un model excesiv de complicat – care îşi propune să aibă în vedere toate aspectele şi detaliile posibile ale fenomenului original – poate deveni costisitor, greoi sau chiar inoperant. Un model simplist, prea sumar, poate fi incorect, ca urmare a neglijării unor aspecte importante ale sistemului investigat. În concluzie, un model M al unui sistem original S este un alt sistem S’, care este echvalent cu S din anumite puncte de vedere şi care pote fi studiat mai uşor ca S . Din determinarea pe S’ (adică pe M ) a unor informaŃii se deduc informaŃiicorespunzătoare pentru S . Echivalarea sau înlocuirea lui S’ cu S pote fi exactă sau aproximativă. În domeniul teoriilor formale se pot construi sisteme S’ care sunt riguros echivalente cu S, din anumite puncte de vedere, ca, de exemplu, modelele din geometrie. În alte cazuri, modelul este o construcŃie teoretică care aproximează realitatea. Dacă această construcŃie teoretică este redată prin relaŃii matematice, aceste relaŃii împreună cu interpretarea lor constitue modelul matematic al sistemului care se studiază.
Modelul de calcul cu elemente finite Modelele pentru calculele inginereşti în general şi deci şi cele cu elemente finite sunt modele matematice aproximative ale structurilor care se studiază. Pentru trecerea de la structura reală la modelul ei de calcul nu există algoritmi şi metode generale care să asigure elaborarea unui model unic, care să aproximeze, cu o eroare prestabilită, cunoscută, structura care urmează să se calculeze. În general este posibil ca pentru o structură să se elaboreze mai multe modele, toate corecte dar cu performanŃe diferite. Modelul pentru analiza cu elemente finite a unei structuri se elaborează pe baza intuiŃiei, imaginaŃiei şi experienŃei anterioare a celui care face modelarea şi modelul trebuie să sintetizeze eficient toate informaŃiile disponibile referitoare la structura respectivă.
Figura 7.1 Trebuie remarcat faptul că utilizarea calculatoarelor în analiza structurilor a devenit indispensabilă, dar aceasta prezintă pericolul că, “seduşi” de facilităŃile şi automatismul sistemului de calcul, adesea pierdem din vedere că rezultatele obŃinute nu sunt altceva decât consecinŃele ipotezelor care au stat la

baza modelului de calcul, a configuraŃiei modelului şi a algoritmilor utilizaŃi pentru analiza FEA. Din acest impas nu se poate ieşi decât pe seama intuiŃiei, imaginaŃiei şi experienŃei. Elaborarea modelului cu elemente finite (FEM) şi analiza efectuată cu acesta (FEA) sunt etape componente ale unui proces relativ complex, de concepŃie şi fabricaŃie şi trebuie să servească la realizarea, în condiŃii riguros definite, a unui anumit produs. În acest context, modelul MEF nu poate fi conceput decât după ce a fost proiectată într-o primă formă – în cadrul unui proces preliminar CAD - structura care trebuie să fie analizată. Urmează ca în etape succesive, având în vedere rezultatele obŃinute, să se modifice – în vederea ameliorării performanŃelor realizate – atât proiectul produsului cât şi modelul MEF. În acest scop se efectuează numeroase testări, adaptări, optimizări şi validări, aşa cum rezultă din schema din figura 7.1.
Modelul conceptual Prima şi cea mai importantă etapă a elaborării unui model performant este cea de realizare a modelului conceptual, primar sau fundamental. Pornind de la desenul structurii care urmează să fie analizată şi având în vedere cerinŃele impuse FEA, se fac următorele “operaŃii”: - se decide care sunt elementele constructive ale structurii, care vor deveni componente ale modelului cu elemente finite (EF); - se stabilesc elementele structurii care nu vor fi avute în vedere la elaborarea modelului, fiind apreciate ca accesorii sau detalii lipsite de importanŃă, din puncul de vedere al scopului FEA; - se aleg formele geometrice sub care se vor defini componentele modelului, adică: linii, suprafeŃe sau volume, avându-se în vedere şi tipurile de EF care se vor utiliza pentru fiecare componentă; - se hotărăsc modalităŃile de aplicare a sarcinilor (forŃe şi momente concentrate şi (sau) distribuite, acceleraŃii, presiuni, temperaturi etc) şi care sunt componentele modelului care le vor prelua. Această operaŃie implică şi determinarea riguroasă a valorilor, direcŃiilor şi coordonatelor punctelor de aplicaŃie ale sarcinilor. Se vor stabili cazurile de încărcare ale modelului; - se identifică condiŃiile de rezemare ale structurii şi se decide modul în care aceste condiŃii vor fi “modelate” şi anume: blocarea gradelor de libertate geometrică ale unor noduri, introducerea unor EF speciale pentru modelarea contactului sau a frecării, definirea în reazeme a unor deplasări sau reacŃiuni cunoscute etc. Dacă este cazul, se vor stabili mai multe variante ale condiŃiilor de rezemare; - se decid condiŃiile generale de elaborare ale modelului: tipurile elementelor finite pentru diversele componente ale acestuia, tipurile de materiale şi proprietăŃile lor, numerele maxime, aproximative, ale nodurilor şi elementelor finite ale modelului, zonele de interes deosebit (de exemplu, unde se presupune că tensiunile au gradienŃi mari) şi varintele FEA. Modelul conceptual trebuie să aibă în vedere valorificarea tuturor informaŃiilor disponibile privind structura (condiŃii şi regimuri de funcŃionare, de montaj , de avarie etc) şi modalităŃile de utilizare ale rezultatelor obŃinute prin FEA. Modelul trebuie să asigure, de fapt, o simulare satisfăcătoare - din anumite puncte de vedere, bine precizate - a comportării structurii, pe calculator, folosind metoda
elementelor finite şi un program corespunzător. Factori care determină elaborarea modelului de calcul La elaborarea modelelor cu EF trebuie să se aibă în vedere o multitudine de aspecte şi factori, dintre care cei mai importanŃi se prezintă în cele ce urmează. Scopul calculului. Beneficiarii FEA pot solicita informaŃii diverse în legătură cu modul cum se va comporta structura în anumite situaŃii, adică rezultatele calculului trebuie să dea – pe cât posibil - răspunsuri neechivoce la întrebări precis formulate (adesea beneficiarii trebuie informaŃi ce poate oferi FEA). ConsecinŃa acestei situaŃii este că trebuie efectuate una sau mai multe tipuri de analize, care să ofere informaŃiile dorite. În principiu, este posibil ca pe acelaşi model, care are aceeaşi reŃea de discretizare şi aceleaşi tipuri de elemente finite, să se efectueze mai multe tipuri de analize, ca, de exemplu, analiză statică, de stabilitate, de vibraŃii etc. Dar într-o astfel de situaŃie este foarte posibil ca performanŃele modelului şi calitatea informaŃiilor obŃinute să nu fie satisfăcătore pentru toate

variantele de analiză. Se ajunge astfel la cerinŃa ca modelul să fie elaborat având în vedere scopul calculului. În general foarte rar este necesar să se creeze un model complet nou pentru fiecare tip de FEA. Adesea se foloseşte un model de bază, destinat uneia din variantele de calcul şi acestuia i se aduc modificările cerute de celelalte tipuri de analize. Pentru clarificarea şi fixarea ideilor se dau, pe scurt, câteva exemple: - pentru determinarea valorilor maxime ale tensiunilor, trebuie efectuate “discretizări locale foarte fine, în zonele cu concentratori; - pentru analizele dinamice, sunt extrem de importante aspectele modelării maselor şi amortizărilor; - pentru analizele termice trebuie definite foarte precis sursele de căldură, inclusiv parametrii lor, şi valorile constantelor fizice ale transmiterii căldurii prin conducŃie, convecŃie şi radiaŃie;
- pentru structurile cu deplasări mari trebuie precizate variaŃiile mărimilor şi direcŃiilor sarcinilor în timpul procesului de deformaŃie.
Simplitatea modelului. Marea majoritate a structurilor inginereşti sunt de o mare complexitate în ceea ce priveşte formele geometrice, sarcinile, reazemele şi caracteristicile mecanice ale materialelor din care sunt realizate. Este cazul carcaselor, batiurilor, instalaŃiilor, utilajelor de proces, maşinilor de toate tipurile etc. Elaborarea unui model care să aibă în vedere cele mai mici detalii ale structurii reale ar deveni foarte costisitor sau chiar imposibil de realizat, în condiŃii rezonabile, în ceea ce priveşte costul şi durata de timp necesară. Se impune astfel considerarea unei structuri “ipotetice” simplificate, adică a unui model de calcul raŃional. Trebuie analizat cu discernământ dacă, într-un anumit context, elaborarea unui model mai complicat, care are costuri mai mari (în timp şi bani), se justifică prin câştigul de informaŃii suplimentare comparativ cu o variantă mai simplă. Rezultatele să fie acoperitoare. Modelul trebuie elaborat astfel încât rezultatele FEA trebuie să fie într-o măsură raŃională şi rezonabilă acoperitoare, adică să ofere o marjă suplimentară de siguranŃă care să compenseze faptul că MEF este aproximativă. În ceea ce priveşte procesele de calcul, utilizarea calculatoarelor oferă garanŃia unei fiabilităŃi foarte mari a acestora şi a unui nivel de încredere ridicat al rezultatelor. Corelarea modelului cu condiŃiile existente. Modelul este o componentă a unui ansamblu foarte complex, care include un mare număr de condiŃii şi restricŃii, adesea contradictorii. Deci elaborarea modelului se face totdeauna într-un anumit context, pentru un set de condiŃii impuse, riguros definite. Structura reală, realizată fizic, are abateri efective în ceea ce priveşte dimensiunile, formele geometrice, sarcinile efective (nominale, de calcul, maxime, accidentale, de avarie, de montaj, de transport, de exploatare etc), condiŃiile de rezemare, caracteristicile fizice şi mecanice ale materialelor, faŃă de cele considerate în proiect şi deci şi la elaborarea modelului. Prin urmare este neraŃional să se elaboreze un model foarte performant, costisitor şi laborios, dacă valorile numerice ale datelor “de intrare” – pentru care se face FEA – sunt afectate de incertitudini sau de erori mari. Prin urmare, modelarea şi analiza trebuie făcute cu o precizie limitată, bine definită, în cadrul acesteia structura reală putând fi simplificată şi “idealizată” printr-un model corespunzător. De asemenea, pe parcursul diverselor faze ale elaborării unui proiect, sau ale realizării unui produs, sunt necesare modele diferite, determinate de informaŃiile disponibile în etapa respectivă. Frecvent, pentru calcule preliminare, se utilizează modele mult simplificate, comparativ cu modelele destinate unor calcule de verificare în faze finale ale proiectării. De exemplu, pe modele simple se fac analize la solicitări statice în fazele de proiect preliminar şi apoi se au în vedere analize de stabilitate, dinamice, de oboseală, de durabilitate etc, pe modele mai sofisticate, elaborate pe baza formei finale a proiectului. Pentru numerose domenii inginereşi – ca, de exemplu, utilajele energetice, vehiculele de toate categoriile, construcŃiile civile şi industriale etc - s-au elaborat diverse prescripŃii, norme şi standarde privind modelele de calcul, evaluarea sarcinilor, variantele analizelor obligatorii etc. Aceste normative pot avea caracterul unor recomandări sau pot fi obligatorii, ele putând fi aplicabile unor ramuri industriale, la nivel naŃional sau pot fi internaŃionale. În aceste condiŃii trebuie ca elaborarea modelului

să fie astfel făcută încât el să realizeze încadrarea corectă a situaŃiei reale în ipotezele şi prevederile de detaliu ale normelor respective. Unele programe MEF au implementate proceduri care conŃin astfel de condiŃii speciale. În ultimii ani au apărut şi norme cu recomandări privind modul cum să se elaboreze modelul cu elemente finite. De exemplu, pentru industria de automobile se recomandă care să fie tipurile elementelor finite ale modelului, care să fie dimensiunile minime ale elementelor etc, pentru diversele componente, cum ar fi blocul motor, caroseria, cutia de viteze etc.
Exemple de modele În figurile 7.2 şi 7.3 se prezintă, pentru a ilustra unele din ideile enunŃate mai sus, configuraŃiile generale a două modele ale unor instalaŃii şi utilaje siderurgice. Modelul din figura 7.2 este al componentei superioare a unui răcitor de gaz dintr-o instalaŃie de elaborare a oŃelului. Solicitările sunt: greutatea proprie, presiunea exterioară de un bar (în interiorul instalaŃiei fiind vid) şi un câmp de temperatură variabilă. CondiŃiile de rezemare sunt: cele două flanşe inferioare sau cele trei reazeme laterale.
Figura 7.2 Modelul din figura 7.3 este al unui transportor pentru o oală de turnare, plină cu oŃel lichid. ConstrucŃia este realizată din tablă, prin sudură. Solicitările sunt: greutatea proprie, greutatea oalei şi a
Figura 7.3 oŃelului lichid. S-a avut în vedere şi efectul dinamic al aplicării sarcinii produs de faptul că oala se aşează pe transportor cu o anumită viteză şi anume cea de coborâre a sarcinii de către podul rulant. Reazemele modelului sunt cele patru boghiuri care asigură şi deplasarea transportorului pe o cale de rulare. Boghiurile nu au fost modelate în acest caz deoarece ele au fost proiectate, calculate şi executate de o firmă specializată, care a garantat performanŃele produsului.

Stabilirea domeniului de analizǎ şi a condiŃiilor la limită
Domeniul de analizǎ reprezintǎ un model al corpului de studiat, sau numai al unei regiuni semnificative aparŃinând acestuia. El se obŃine printr-un proces de idealizare a geometriei corpului original şi uneori de selecŃie a regiunii de analizǎ. Idealizarea este necesarǎ pentru a reduce din complexitatea configuraŃiei geometrice a corpului original, pentru a micşora efortul de pregǎtire a datelor de intrare şi de calcul. În acelaş scop se face şi selecŃia unei regiuni de analizǎ, atunci când proprietǎŃile de simetrie şi omogenitate permit acest lucru. De asemenea, selecŃia apare necesarǎ atunci când se lucreazǎ cu corpuri de dimensiuni foarte mari, sau atunci când o problemǎ tridimensionalǎ se transformǎ într-o problemǎ bidimensionalǎ sau unidimensionalǎ. În cazul în care domeniul de analizǎ reprezintǎ numai o parte din corpul original de studiat, o atenŃie deosebitǎ trebuie acordatǎ adaptǎrii condiŃiilor la limitǎ, astfel încât sǎ nu schimbǎm odatǎ cu geometria şi structura câmpului de variabile analizat.
a: Schema reală b: Modelul idealizat
Fig. 4.3: Grindă în consolă Exemplul 1. Se consideră elementul de grindă, de secŃiune variabilă în care sunt aplicate două găuri circulare Fig. 4.3.a. Această grindă este parte componentă a unei structuri mult mai mari şi preia o forŃă în capătul liber, generată de contactul cu altă componentă a unei alte structuri. Se cere să se determine săgeata din secŃiunea B precum şi tensiunea echivalentă maximă. Se presupune că sunt cunoscute toate dimensiunile, valoarea şi poziŃia forŃei rezultante F precum şi caracteristicile materialului. Pentru această aparent simplă problemă apar o serie de întrebări, la care analistul trebuie să ia deciziile cele mai adecvate pentru a obŃine soluŃia cu o precizie cât mai mare. Unele dintre aceste întrebări sunt: a. este adecvat un model în plan sau în spaŃiu, răspunsul în general depinde de grosimea acestei grinzi, dacă grinda este înaltă (adică are grosime mică), un model în 3D nu se justifică, deoarece efortul de calcul creşte considerabil fără a obŃine un rezultat mai precis; b. modelul trebuie să includă şi zonele din vecinătatea forŃei aplicate şi respectiv o zonă cât mai mare din structura de care această grindă este fixată, răspunsul la această întrebare este greu de precizat în special din cauză că deplasarea secŃiunii B este produsă atât de deformaŃia grinzii cât şi de deformaŃia structurii de care aceasta este fixată, tensiunea maximă însă este de aşteptat să apară în zona slăbită a celor două găuri şi nu depinde esenŃial de condiŃiile de modelare a structurii care susŃine grinda în virtutea principiului Saint Vénant. Dacă structura de fixare a grinzii se poate considera rigidă, atunci cel mai comod este să se modeleze efectul acesteia asupra grinzii printr-o încastrare rigidă; c. cum se consideră aplicată forŃa, având în vedere că de fapt se cunoaşte rezultanta forŃei distribuite şi punctul de aplicaŃie al ei, aplicarea forŃei într-un singur nod poate conduce la obŃinerea unor tensiuni "false" foarte mari în vecinătatea acestui nod, dacă discretizarea din zona respectivă este foarte fină, apoi problema s-a delimitat ca zonă de interes în secŃiunea din punctul B şi în vecinătatea celor două găuri. Din acest motiv, zona din dreapta punctului B poate să nu facă parte din modelul de calcul, iar încărcarea se poate aplica în secŃiunea B, prin impunerea condiŃiilor la limită în tensiuni, (obŃinute din relaŃiile Navier şi Juravski) sau pur şi simplu se consideră torsorul echivalent din secŃiunea B şi forŃele se aplică concentrat în noduri dacă discretizarea în această secŃiune nu conŃine multe noduri. În condiŃiile deciziilor de mai sus modelul de calcul se prezintă în Fig.4.3.b. El urmează să fie discretizat cu elemente de tip solid plan: Q4, Q6, Q8, etc şi apoi analizat.

Aspectele de modelare ar putea continua cu faza a doua adică alegerea tipului de element cel mai adecvat, modul de discretizare, etc. Nu trebuie pierdut din vedere că rezultatele obŃinute reflectă modelul de calcul şi nu structura reală şi acestea trebuie interpretate cu mare atenŃie. Scopul şi tipul calcului poate influenŃa alegerea domeniului de analizǎ, asfel dacǎ intereseazǎ un efect local şi la distanŃǎ se pot considera variaŃia mǎrimilor cunoscutǎ, domeniul de analizǎ se poate reduce la zona de interes. Aceastǎ reducere nu este întotdeauna posibilǎ, exemplul de mai sus al concentratorului poate fi valabil într-un calcul static dar nu şi în unul dinamic. Stabilirea ipotezelor de lucru Stabilirea corectǎ a ipotezelor de lucru este factorul esenŃial în obŃinerea unor rezultate apropiate de soluŃia exactǎ. În acest sens se au în vedere: -geometria corpului; -proprietǎŃile materialelor (liniar elastice, neliniare, plastice etc); -domeniul de variaŃie al principalelor mǎrimi de câmp investigate; -regimul de funcŃionare (static, dinamic etc); -modul de aplicare al sarcinilor si felul reazemelor, etc. Exemplul 2. Se consideră o grindă de secŃiune variabilă (structura unui podeŃ) care sprijină prin aşezare pe trei stâlpi ca în Fig. 4.4.a. Structura trebuie să preia o încărcare uniform distribuită dată de presiunea de valoare constantă p, şi accidental sarcina axială distribuită liniar de valoare maximă a presiunii q. Se cere să se precizeze valoarea maximă a reacŃiunilor din reazeme şi tensiunea maximă din grindă pentru trei cazuri de încărcare: a. numai forŃa distribuită p; b. numai forŃa distribuită q; c. ambele forŃe lucrează simultan. Se presupune că sunt cunoscute geometria structurii, datele despre materiale şi încărcări. În forma prezentată, problema de mai sus prezintă deja câteva caracteristici de modelare primară incluse în enunŃ, acestea ar putea proveni de la un beneficiar care comandă un astfel de calcul. Este de presupus că încărcarea cu forŃele distribuite p modelează forŃele utile de încărcare apărute în momentul solicitării grinzii precum şi încărcarea generată de greutatea proprie. ForŃele distribuite q ar putea proveni dintr-o preluare ineficientă a dilatării termice. Nu se precizează nimic despre o posibilă nealiniere a celor trei stâlpi de sprijin. Aceste aspecte ar putea fi omise intenŃionat sau nu de către beneficiar, şi în această situaŃie interesează doar livrarea unor rezultate corespunzătoare pentru modelul propus.
Fig. 4.4: Grindă static nedeterminată Primele aspecte care se pot evidenŃia sunt: simetria modelului şi a cazurilor de încărcare; caracterul static nedeterminat al structurii din punct de vedere al reacŃiunilor din partea celor trei stâlpi.
Dacă dimensiunea d a diametrului celor trei stâlpi este relativ mică în comparaŃie cu dimensiunile grinzii, încărcarea necunoscută cu presiunea de contact dintre stâlpi şi grindă se poate

înlocui cu un reazem simplu într-un singur nod (sau mai multe noduri funcŃie de discretizare), dar aici apare o problemă esenŃială şi anume: reacŃiunile sunt orientate în sus sau e posibil ca sensul lor să fie invers ? Această incertitudine face problema neliniară, pentru că de exemplu reazemul din B lucrează numai pe o direcŃie. Problema însă se analizează în două etape: 1) se presupune că reazemul lucrează sau nu lucrează şi 2) se face verificarea rezultatelor.
Fig. 4.5: Piesă de analizat fixată cu patru şuruburi
pe un bloc rigid
Exemplul 3. Piesa din Fig. 4.5 trebuie analizată din punct de vedere static pentru analiza stării de tensiune. Din motive de simetrie şi analiza cu atenŃie a comportării piesei se poate adopta modelul de calcul prezentat în Fig. 4.6. Se obervă că modelarea se face numai pentru piesa de interes, iar efectul celorlalte componente se “include” prin condiŃiile la limită în deplasări şi forŃe distribuite după anumite legi considerate de analist.
Fig. 4.6: Modelul de calcul pentru problema din figura 4.5
Factori de influenŃǎ a discretizǎrii
Se poate face o distincŃie netǎ între:
-1.discretizarea structurilor care au un suport fizic respectiv discretizarea în elementele sale componente (structuri din bare); -2.discretizarea corpurilor solide sau fluide care este un proces pur matematic, arbitrar.
O serie de factori care condiŃioneazǎ discretizarea sunt: -tipul elementelor finite (se aleg funcŃie de tipul problemei şi domeniul de analizǎ, de precizia doritǎ, de variaŃia mǎrimii necunoscute etc). Elementele parabolice sunt preferate elementelor liniare, întrucât la acelaş numǎr de noduri soluŃia discretizǎrii cu elemente parabolice este mai precisǎ decât cea cu elemente liniare. Dacǎ existǎ mai multe tipuri de elemente finite la graniŃǎ dintre ele trebuie sǎ se asigure continuitatea;

-mǎrimea şi numǎrul elementelor finite influenŃeazǎ convergenŃa soluŃiei (vezi Fig. 4.7). Se observǎ cǎ la un numǎr mai mare de elemente rezultatul se apropie cǎtre soluŃia exactǎ dar creşterea excesivǎ poate duce la un “colaps” datoritǎ efectului erorii de maşinǎ la un volum mare de calcule; -poziŃionarea nodurilor, care în general se face uniform în structurǎ. DiscontinuitaŃi în geometrie (Fig. 4.8.a) sau în încǎrcare (Fig. 4.8.b) impun alegerea unor
noduri intermediare. Trecerea de la o zonǎ cu discretizare finǎ la una cu discretizare grosolanǎ se face progresv, nu brusc; -gradul de uniformitate al reŃelei de elemente finite (vezi Fig. 4.9). Se evitǎ folosirea elementelor cu formǎ alungitǎ (triunghiuri foarte ascuŃite, dreptunghiuri cu raportul dimensiunilor mai mare de 3). Preferabil ar fi ca discretizarea cu triunghiuri sǎ conŃinǎ numai triunghiuri echilaterale, discretizarea cu patrulatere sǎ conŃinǎ doar pǎtrate iar cea spaŃialǎ cu brickuri sǎ conŃinǎ elemente cubice etc;
Fig.4.8: Discontinuitati în geometrie şi încărcare
Fig. 4.9: Forme bidimensionale de elemente -stabilirea zonelor de frontierǎ, pentru introducerea corectǎ a condiŃiilor la limitǎ; -numǎrul maxim de noduri sau elemente permis de program; -posibilitatea numerotǎrii optime a nodurilor sau a elementelor pentru reducerea necesarului de memorie şi calcul. Cum poate reduce simetria geometricǎ dimensiunea problemei?
Se poate arǎta (cu metoda eforturilor studiatǎ la rezistenŃa materialelor, de exemplu), cǎ structurile cu simetrie geometricǎ faŃǎ de un plan (simetrie în oglindǎ), încǎrcate simetric (Sim) sau antisimetric (ASim) faŃǎ de acelaşi plan de simetrie pot reduce problema la tratarea pe jumǎtate pentru fiecare plan de simetrie prin considerarea condiŃiilor de deformaŃie în planul de simetrie geometricǎ (vezi Fig. 4.10). În general se pun în evidenŃǎ simetrii faŃǎ de cele trei axe ale sistemului de referinŃă global. Dacǎ normala planului de simetrie coincide ca direcŃie cu axa X se spune cǎ simetria este faŃǎ de planul X. Încǎrcǎrile faŃǎ de acest plan pot fi simetrice (XSim) sau antisimetrice (XASim).
Fig. 4.7: Influenta numarului de
elemente asupra preciziei

În tabelul 4.1 se prezintǎ condiŃiile la limitǎ în planul de simetrie pentru cele 6 posibilitǎŃi de simetrie şi antisimetrie de încǎrcare pentru structuri cu simetrie faŃǎ de sistemul global de axe. Deci, nodurile care se află în planul de simetrie, trebuie să fie “blocate” pe anumite direcŃii la translaŃii şi rotaŃii dacă e cazul (se discută analiza structurală, dar condiŃii similare există si pentru alte tipuri de analize), astfel încât deformatele structurilor să fie simetrice sau antisimetrice, funcŃie de încărcare. Tabelul 4.1
Încărcare BX BY BZ BXX BYY BZZ cod al blocajelor XSim 1 0 0 0 1 1 156 YSim 0 1 0 1 0 1 246 ZSim 0 0 1 1 1 0 345
XAntiSim 0 1 1 1 0 0 234 YAntiSim 1 0 1 0 1 0 135 ZAntiSim 1 1 0 0 0 1 126
MenŃionǎm cǎ o structurǎ simetricǎ, încarcatǎ oarecum, pentru un calcul liniar poate fi şi ea redusǎ la rezolvarea a douǎ probleme tratate pe jumǎtate şi suprapunere de efecte conform cu figura 4.11.
Simetria “ciclică” poate reduce considerabil modelul de calcul (vezi Fig 4.12). Hexagonul regulat încǎrcat cu o forŃǎ centralǎ perpendicularǎ pe plan poate fi tratat pe a douǎsprezecea parte (deoarece există
Fig. 4.10: Reducerea problemei prin simetrie geometrică
Fig. 4.11: Reducerea problemei cu simetrie geometrica in doua probleme particulare care
se pot trata pe jumatate

şi simetrie reflexivă pentru fiecare triunghi echilateral care formează hexagonul). ForŃa se împarte egal pe cele douǎsprezece zone.
Pentru a putea avea acces la asemenea artificii programul trebuie sǎ permitǎ punerea condiŃiilor la limită în deplasǎri pe orice direcŃie.
Fig. 4.12: Simetrie “ciclică”
Fig. 4.13: Simetrie axială
Structurile axial simetrice (cu geometria obŃinutǎ prin rotirea unei figuri plane în jurul unei axe) încǎrcate simetric (nu neapǎrat) deşi sunt spaŃiale se pot trata în plan, conform cu Fig. 4.13. ForŃa echivalentǎ F reprezintǎ suma forŃelor distribuite pe întreaga circumferinŃǎ sau suma forŃelor pe arcul corespunzǎtor unui radian, depinde de programul de lucru. CondiŃiile la limitǎ în deplasǎri pe direcŃia X apar doar dacǎ geometria structurii conŃine axa Y. Pentru alte tipuri de probleme (cum ar fi analiza termicǎ pe structuri cu simetrie) condiŃiile la limitǎ se pun mai simplu.

11.
ASPECTE NELINIARE ÎN MODELAREA CU ELEMENTE FINITE. DEPLASĂRI MARI, NELINIARITĂłI DE MATERIAL ŞI CONTACT
Categorii de probleme neliniare Toate fenomenele din domeniul mecanicii solidului deformabil sunt neliniare. Din fericire, sunt numeroase situaŃiile ivite în practica inginerului mecanic sau constructor, în care, pentru obŃinerea unor soluŃii aproximative satisfăcătoare, se acceptă ipoteze care duc la o formulare liniară a problemei reale, sau, altfel spus, la un model liniar elastic. În majoritatea unor astfel de cazuri, erorile soluŃiei problemei liniar elastice sunt relativ mici faŃă de soluŃia exactă a problemei neliniare. Analiza unei structuri ca problemă neliniară, când este cazul, se justifică prin obŃinerea unor rezultate mai precise, conforme cu realitatea, în acest caz fiind valorificate – de obicei - “rezervele” de rezistenŃă ale structurii. Calculul în regim liniar elastic îndeplineşte următorele condiŃii:
- relaŃiile dintre tensiuni şi deformaŃii specifice sunt liniare; - deformaŃiile specifice sunt mici; - deplasările sunt mici; - există o dependenŃă liniară între deplasări şi sarcini; - eforturile nu sunt funcŃii de deplasări; - ecuaŃiile de echilibru scrise pentru structura nedeformată rămân valabile şi pentru structura deformată; - este valabil principiul suprapunerii efectelor.
Trebuie remarcat faptul că uneori unele din condiŃiile enumerate sunt consecinŃe ale altora, ca, de exemplu, dacă primele trei condiŃii sunt îndeplinite, atunci, de regulă, există liniaritate între deplasări şi sarcini. Dar această situaŃie nu este generală, fiind numerose excepŃiile întâlnite, ca, de exemplu, cazul arcurilor elicoidale conice sau al structurilor cu frecări puternice în reazeme. ExistenŃa frecărilor în reazeme poate duce la încălcarea principiului suprapunerii efectelor. În sensul cel mai general, se consideră că o problemă de mecanica solidului deformabil este neliniară, când cel puŃin una din condiŃiile enumerate nu este îndeplinită. Sunt cazuri în care abordarea unor probleme neliniare ale analizei structurilor mecanice deformabile nu mai poate fi evitată, ca, de exemplu: - Structura este executată din materiale “care nu ascultă de legea lui Hooke”, adică curba caracteristică a acestora nu are o porŃiune rectilinie; este cazul fontelor, al unor aliaje neferoase, mase plastice, materiale compozite etc. - În unele zone ale structurii deformaŃiile se produc în stadiul plastic, deci structura este solicitată elasto-plastic, adică parŃial elastic, parŃial plastic. Astfel de situaŃii apar când sunt concentratori de tensiuni, probleme de contact, în studiul unor procese tehnologice, în analiza comportării unei structuri înaintea producerii ruperii etc. - Probleme la care deplasările produse de sarcinile aplicate sunt mari, acestea putând fi însoŃite sau nu şi de deformaŃii plastice. Este cazul unor structuri flexibile, structuri cu pereŃi subŃiri, structuri formate din bare sau plăci, elemente elastice compensatoare de dilatare, studiul unor fenomene post-flambaj sau post-fluaj etc. În practica analizei acestor probleme se face distincŃie între structuri cu deplasări mari şi cele cu deplasări foarte mari. - Probleme de contact, la care pentru încărcare zero contactul este într-un punct sau pe o linie (arie zero) iar pe măsură ce sarcina creşte contactul are loc pe suprafaŃă a cărei formă şi arie cresc.

DistribuŃia presiunii de contact se modifică şi ea, dependenŃa fiind nelinară în raport cu sarcina. În zona contactului apar, de obicei teniuni relativ mari şi este posibilă apariŃia deformaŃiilor plastice. - În practica FEA, pentru structuri industriale complexe, este posibil ca dependenŃa deplasărilor de ansamblu ale structurii să fie neliniară funcŃie de sistemul de sarcini, datorită forŃelor de frecare din reazeme sau datorită existenŃei unor asamblări cu elemente (de exemplu garnituri) care au comportare neliniară. Desigur că se pot ivi situaŃii în care se “combină” unele din aspectele menŃionate, care nu reprezintă nici pe departe o enumerare exhaustivă. Problemele enumerate pot fi formulate şi abordate ca procese statice, staŃionare sau ca procese dinamice, dependente de timp, nestaŃionare sau tranzitorii, materialele putând fi vâscoelastice sau vâscoplastice, adică cu proprietăŃi elastice variabile în funcŃie de timp. În concluzie, se poate afirma că există o foarte mare diversitate de probleme neliniare, cărora le corespund numeroase metode de rezolvare. Metoda elementelor finite (MEF) se preteză foarte bine pentru analiza structurilor cu comportare neliniară, programele actuale permiŃând abordarea problemelor cele mai complicate. În practica modelării şi analizei cu elemente finite, în vederea simplificării şi sistematizării acestor probleme se foloseşte, de obicei următoarea clasificare: a. Probleme cu neliniaritate fizică (de material). Legea lui Hooke este înlocuită cu o dependenŃă între tensiuni şi deformaŃii mai complexă, determinată de configuraŃia curbei caracteristice a materialului. Se presupune că solicitările produc deformaŃii peste limita de curgere, apărând şi deformaŃii plastice, postcurgere. Deci în structura care se analizează starea de deformaŃii este elasto-plastică, adică în unele zone deformaŃiile sunt elastice iar în altele elastice şi plastice. b. Probleme cu neliniaritate geometrică. În această categorie intră problemele pentru care în procesul de deformaŃie se produc deplasări mari. Se admite că materialul are o comportare liniar elastică. RelaŃiile dintre deformaŃii şi deplasări precum şi relaŃiile dintre sarcini şi deplasări (pentru întreaga structură) devin neliniare. De asemenea, valorile eforturilor devin funcŃii de deplasări, iar ecuaŃiile de echilibru scrise pentru structura nedeformată nu mai rămân valabile şi pentru structura deformată. c. Probleme cu neliniaritate generală. În aceste cazuri se suprapun, adică se “cumulează”, condiŃiile de neliniaritate de material şi geometrică, de la categoriile a şi b, aceasta fiind problema generală cu
comportare neliniară. În această categorie intră şi problemele de contact. În cadrul fiecăreia din cele trei categorii de probleme pot fi avute în vedere aspecte dinamice sau de vâscoelasticitate sau vâscoplasticitate.
Diagnosticarea unei problame neliniare În practica modelării şi analizei cu elemente finite se întâlnesc situaŃii în care nu există iniŃial indicii sau informaŃii privind comportarea neliniară a structurii şi deci se realizează, pentru început, o analiză
Figura 23.1
linară (L, în figura 23.1). În urma postprocesării şi evaluării rezultatelor obŃinute se poate ajunge la concluzia că de fapt structura poate avea o comportare neliniară şi analiza se reia în condiŃii corespunzătoare. Indicii simple şi sigure în acest sens sunt:

- apariŃia unor tensiuni, în noduri sau în elemente, ale căror valori maxime depăşesc limita de curgere a materialului, cσ (figura 23.1.a);
- producerea unor deplasări ale căror valori maxime reprezintă peste 1 – 5 % din dimensiunile de gabarit ale structurii. Din analiza diagramelor din figura 23.1, compararea dreptelor L, corespunzătoare problemei liniare cu curbele N, corespunzătoare problemei neliniare, se constată că sunt posibile diferenŃe mari ale rezultatelor (deplasări - ∆u şi tensiuni - ∆σ) în cele două variante.
Principalele metode de rezolvare Cele mai utilizate metode de rezolvare ale problemelor neliniare sunt metode numerice, indirecte de calcul. Acestea se bazează pe principiul că o problemă neliniară poate fi aproximată printr-o succesiune de probleme elementare liniare. Avantajele acestor metode sunt: - generalitatea: metodele pot fi aplicate pentru clase de probleme relativ vaste; - simplitatea: metodele de calcul pentru problemele liniar elastice se pot adapta cu modificări minime pentru analiza problemelor neliniare; - posibilitatea implementării pe calculator: aceste metode duc la algoritmi care se pot foarte uşor implementa în programe MEF pentru probleme liniar elastice, ca module sau proceduri specifice; - posibilitatea evaluării ordinului de mărime al erorii soluŃiei aproximative: calculul făcâdu-se iterativ, diferenŃa între soluŃiile obŃinute prin două iteraŃii succesive este un indiciu al erorii soluŃiei aproximative faŃă de soluŃia “exactă”. Se precizează faptul că în acest context soluŃia exactă este cea MEF, care de fapt este apoximativă. Principalul dezavantaj al acestor metode este volumul mare de calcul, care în prezent şi-a pierdut importanŃa datorită performanŃelor impresionante ale sistemelor de calcul. Cele mai importante metode indirecte de calcul sunt cele incrementale, iterative şi mixte, care sunt combinaŃii ale primelor două. Fiecare dintre aceste metode are mai multe variante de aplicabilitate. În metodele enumerate se consideră că în relaŃia de bază a MEF, pentru regim staŃionar,
[K] u = F, (23.1) în care: [K] este matricea de rigiditate a modelului structurii, u – vectorul deplasărilor nodale şi F
– vectorul sarcinilor nodale, neliniaritatea provine din matricea de rigiditate care este o funcŃie neliniară de proprietăŃile materialului (nelinaritate fizică) sau de modificarea geometriei structurii în procesul de deformaŃie (neliniaritate geometrică). Neliniaritatea de material. Matricea [K] depinde de matricea de elasticitate a materialului [D] care este definită de caracteristicile elastice ale materialului, care în această situaŃie sunt variabile, fiind funcŃii de vectorul tensiunilor σ, adică se poate considera că [K ( [D ( σ )] ) ]. Neliniaritatea geometrică. În acest caz, în procesul de deformaŃie se produc deplasări mari, având ordinul de mărime comparabil cu cel al dimensiunilor structurii şi configuraŃia geometrică inŃială a stucturii se modifică apreciabil, adică matricea de rigiditate iniŃială nu mai poate descrie comportarea sub sarcină a structurii în ultima fază a procesului de încărcare. Ca urmare, eforturile depind de deplasări, iar ecuaŃiile de echilibru pentru structura deformată trebuie scrise cu luarea în considerare şi a deplasărilor, adică matricea de rigiditate a structurii depinde de deplasările nodale, deci se poate considera că [K ( u ) ]. Metoda incrementală. Se mai numeşte şi pas cu pas. Ideea fundamentală a metodei este subâmpărŃirea sarcinii în mai multe sarcini mici, creşteri, paşi sau incremente. Uzual aceste creşteri ale sarcinii sunt egale dar, în general, pot fi diferite de la un pas la următorul. Sarcina se consideră crescătoare (sau descrescătoare), dar în cursul aplicării fiecărui increment se presupune că structura are o comportare liniară, adică matricea [K] se consideră constantă, dar poate fi diferită de la un pas la următorul. SoluŃia pentru fiecare pas i de creştere a sarcinii ∆Fi se obŃine sub forma unui increment al deplasărilor ∆ui. Aceste creşteri ale deplasărilor se “cumulează” pentru a obŃine deplasarea totală a structurii pentru fiecare “stadiu” al încărcării. Procesul se continuă până se aplică toată sarcina. Schema de calcul a procesului se prezintă în figura 23.2. Se observă că procedeul este analog

metodelor numerice de calcul utilizate pentru integrarea sistemelor de ecuaŃii diferenŃiale, liniare sau nelinare, cu metoda lui Euler sau Runge-Kutta. La scrierea relaŃiilor de calcul se are în vedere starea de referinŃă a structurii, care poate fi definită de sarcinile iniŃiale F0 şi deplasările iniŃiale u0. De regulă, vectorii F0 şi u0 sunt nuli, deoarece structura este nesolicitată şi nedeformată. Se poate defini o stare iniŃială de echilibru pentru sarcinile şi deplasările iniŃiale.
Figura 23.2 Dacă sarcina totală se divide în m paşi, atunci sarcina efectivă totală este F=F0 + Σ ∆Fj , j = 1…m, în care notaŃia ∆ arată un increment finit. După aplicarea incrementului i sarcina este Fi=F0 + Σ ∆Fj , j = 1…i, cu precizarea că Fm=F. Se procedează analog pentru deplasări şi deci ui=u0 + Σ ∆uj , j = 1…i. (23.2) Pentru calculul incrementului deplasărilor se utilizeză valoarea matricei de rigiditate [Ki-1] determinată pentru sfârşitul pasului anterior, adică [Ki-1] ∆ui = ∆Fi, i = 1, 2, 3,…m, în care se are în vedere că [Ki-1] =[Ki-1 (ui-1 , Fi-1)], şi [K0] este matricea de rigiditate iniŃială, care se calculează pentru configuraŃia geometrică iniŃială a modelului structurii şi pentru constantele materialului, determinate pe curba caracteristică, pentru începutul încărcării. Metoda iterativă. În acest caz structura se consideră încărcată cu întreaga sarcină la fiecare iteraŃie. Deoarece se consideră o valoare aproximativă, constantă, a rigidităŃii structurii pentru fiecare iteraŃie, nu sunt satisfăcute ecuaŃiile de echilibru. După fiecare iteraŃie (sau pas) se calculeză cota parte din sarcina totală care nu satisface ecuaŃiile de echilibru (de fapt fiecare ecuaŃie din sistemul (23.1) este o ecuaŃie de echilibru), aceasta fiind utilizată la iteraŃia următoare pentru a determina o creştere adiŃională a deplasărilor. Procesul se repetă până când ecuŃiile de echilibru sunt satisfăcute într-o măsură aceceptabilă. În esenŃă, metoda iterativă constă în corecŃii succesive ale soluŃiei, până când ecuaŃiile de echilibru sub sarcina totală F sunt satisfăcute. Dacă, în cazul general, există sarcini şi deplasări iniŃiale, F0 şi u0, pentru ciclul i al procesului iterativ de calcul trebuie ca sarcina să se determine cu relaŃia Fi=F - Fe, i-1 , în care F este sarcina totală şi Fe, i-1 este sarcina aflată în echilibru după iterarŃia anterioară. Creşterea deplasărilor, calculată pentru pasul i se determină cu realaŃia [K(i)] ∆ui = Fi . (23.3) Deplasarea totală după iteraŃia i se calculează cu relaŃia (23.2). În final se calculează sarcina Fe, i, necesară să menŃină deplasările ui. Procesul iterativ se continuă până creşterile deplasărilor sau forŃele neechilibrate devin zero, adică ∆ui sau Fi devin nule sau suficient de mici.

În ceea ce priveşe calculul matricei de rigiditate [K(i)] din relaŃia (23.3), de obicei aceasta se determină pentru pasul anterior, în punctul ui-1, Fi-1, adică [K(i)] =[K(i-1)]. Trebuie avut în vedere că [K(0)] este matricea de rigiditate pentru starea iniŃială a structurii, adică, pentru valorile F0 şi u0. Metoda iterativă are diverse variante care diferă prin modul în care se consideră valoarea matricei de rigiditate [K] a structurii. În figura 23.3.a se prezintă schema metodei iterative de bază, iar în figura 23.3.b, o variantă modificată, care foloseşte pentru toate iteraŃiile valoarea iniŃială [K(0)] a matricei de rigiditate. În acest caz este necesar un număr mai mare de iteraŃii, dar în ansamblu se poate obŃine o viteză mai mare a procesului de calcul deoarece nu mai este necesară recalcularea matricei [K] la fiecare iteraŃie. Metoda iterativă este asemănătoare procedeelor numerice de calcul utilizate pentru rezolvarea ecuaŃiilor neliniare, de exemplu, metodele lui Newton sau Newton – Raphson.
a b Figura 23.3 Figura 23.4 Metoda mixtă. Se mai numeşte şi iterativă în paşi şi este o “combinaŃie” între metoda iterativă şi cea incrementală. În figura 23.4 se prezintă schema metodei mixte care constă în faptul că sarcina se aplică incremental, iar după fiecare increment se fac iteraŃii succesive. Această metodă este mai eficientă decât precedentele dar cere un efort de programare mai mare. ComparaŃie între metodele prezentate. Metodele prezentate sunt considerate drept “procedee de bază”, ele având diverse variante în implementările din diverse programe. Este utilă o comparare a lor pentru a pune în evidenŃă avantajele şi dezavantajele fiecăreia. Avantaje:
metoda incrementală: - generalitatea; metoda este aplicabilă pentru aproapte toate tipurile de neliniarităŃi;
- posibilitatea de a descrie relativ complet dependenŃa sarcină - deformaŃie, deoarece se obŃin rezultate intermediare, pentru fiecare treaptă a încărcării;
metoda iterativă: - simplitatea; metoda este uşor de utilizat şi de implementat într-un program; - numărul de iteraŃii este, de obicei, relativ mic. Dezavantaje:
metoda incrementală: - volumul de calcul este relativ mare, de obicei numărul incrementelor fiind mare;
- nu se poate stabili a priori care este valoarea necesară a incrementului sarcinii pentru a obŃine o aproximaŃie dorită a soluŃiei exacte;
- dificultatea de a aprecia “cât de bună” este soluŃia găsită; metoda iterativă: - metoda nu asigură totdeauna convergenŃa către soluŃia exactă; - metoda nu este aplicabilă problemelor dinamice, sistemelor histeretice şi celor
neconservative; - rezultatele, adică deplasările, tensiunile şi deformaŃiile se obŃin numai numai pentru sarcina totală, adică nu se obŃin informaŃii pentru valori intermediare ale încărcării.

Metoda mixtă “combină” avantajele celorlalte două metode şi tinde să elimine dezavantajele fiecăreia, fiind foarte eficientă şi utilizată.
Câteva aspecte ale modelării pentru analize neliniare Caracteristicile materialului. Pentru probleme cu neliniaritate fizică este foarte importantă cunoaşterea precisă şi detaliată a curbei caracteristice a materialului, sau “legea constitutivă”. Curba caracteristică se dă sub formă tabelară (prin puncte) sau sub forma unei funcŃii. Simbolic se scrie σ = f (σ,ε) = [D(σ)]ε. De asemenea, foarte important este calculul matricelor de rigiditate ale elementelor şi cea a structurii care trebuie reluat pentru fiecare pas sau increment al metodelor iterative, incrementale sau mixte. Mai întâi trebuie să se determine valorile constantelor elastice ale materialului (pentru un material izotrop sunt E, G şi υ) şi matricea elastică [D] = [D(σ)], care sunt funcŃii de starea de tensiune. Curba caracteristică a materialului trebuie să fie determinată în condiŃii cât mai apropiate de cele în care funcŃionează structura pentru care se face modelarea şi analiza. Se va avea în vedere faptul că, de obicei, curba caracteristică se determină pentru întindere (compresiune) monoaxială pe când în structură este o stare de tensiuni mai complexă, de obicei, spaŃială. În consecinŃă, pentru a putea compara cele două stări de tensiuni sau de deformaŃii trebuie apelat la o teorie de rezistenŃă. Pentru o curbă caracteristică neliniară a materialului, obŃinută printr-o încercare monoaxială, valoarea modulului de elasticitate E, pentru un material izotrop, se poate de determina astfel: Modulul de elasticitate tangent, se defineşte într-un punct oarecare P al curbei caracteristice σ - ε, ca panta tangentei la curbă, dusă în punctul respectiv (figura 23.5), se notează EtP şi este EtP = dσ / d ε | P. Aproximativ, Et poate fi evaluat prin relaŃia Et ≈ ∆σ / ∆ε, în care ∆ are semnificaŃia de creşteri finite; valoarea lui Et este panta dreptei duse cu linie întreruptă în figura 23.5.
Figura 23.5 Modulul de elasticitate secant,se defineşte într-un punct oarecare P al curbei caracteristice σ - ε, în funcŃie de valorile totale σ şi ε în punctul respectiv (figura 23.5), adică EsP = σ / ε | P. Criteriul şi matricea de plasticitate. Pentru structuri care au sub sarcină o comportare elastoplastică trebuie pusă în evidenŃă solicitarea în stadiul plastic. În acest scop deformaŃia specifică totală ε se descompune în componentele elastică εe şi plastică εp, adică ε = ε
e + εp.
Pentru o metodă incrementală de aplicare a sarcinii, relaŃia anterioară devine dε = dεe + dεp, în care trebuie avut în vedere că incrementul deformaŃiei plastice dε
p este funcŃie de starea curentă de tensiune, de incrementul deformaŃiei totale şi de incrementul tensiunii, adică

dεp = dε
p (σ,dε,dσ) şi de asemenea dε
e = [De]-1dσ. Rezultă relaŃia dσ = [De](dε - dε
p), care poate fi scrisă sub forma dσ = [Dep]dε, în care [Dep] se numeşte matricea elastoplastică, care se calculează cu relaŃia [Dep] = [De] - [Dp], în care [Dp] este matricea de plasticitate. Matricea elastoplastică [Dep] se obŃine din relaŃia anterioară, după ce se determină matricea de plasticitate [Dp], care implică cunoaşterea modului în care se calculează incrementele deformaŃiilor plastice dε
p. Pentru aceasta trebuie adoptat un criteriu de plasticitate, care să determine condiŃiile în care se produc deformaŃii plastice pentru starea de tensiuni spaŃială din fiecare element finit al modelului. Cel mai utilizat este criteriul de plasticitate al lui Mises pentru care Prandtl-Reuss au scris ecuaŃiile care au permis determinarea expresiei matricei [Dp]. Pentru materiale izotrope aceasta este
în care: G = E / 2(1 + υ) este modulul de elasticitate transversal; σ = [( σ1 - σ2
)2 + ( σ2 - σ3 )2 + ( σ3 - σ1
)2 ] / 21/ 2 - tensiunea echivalentă sau efectivă; ε = 2 [( ε1 - ε2
)2 + ( ε2 - ε3 )2 + ( ε3 - ε1
)2 ] / 91/ 2 - deformaŃia echivalentă sau efectivă; χ ≡ Et - panta curbei σ - ε; σ1 , σ2 , σ3 - tensiunile normale principale ale solicitării; I1 = σx + σy + σz = σ1 + σ2 + σ3 - invariantul liniar al stării de tensiune; σDx = σx - I1 / 3; σDy = σy - I1 / 3; σDz = σz - I1 / 3. Modelarea sarcinilor şi a reazemelor pentru structuri cu deplasări mari. Pentru analize ale structurilor cu deplasări mari este foarte important ca modelul să conŃină precizări riguroase, fără echivoc, ale legilor de variaŃie ale intensităŃilor, direcŃiilor şi punctelor de aplicaŃie ale sarcinilor precum şi variaŃiile condiŃiilor de rezemare care se pot produce în cursul procesului de deformare a structurii.
Figura 23.6

Ca exemplu, în figura 23.6 se prezintă trei variante de încărcare ale unei bare încastrate la un capăt şi solicitată cu o forŃă concentrată în capătul liber. Pentru deplasări mici solicitarea este aceeşi în toate cazurile (reprezentate schematic cu linii întrerupte) dar problemele sunt complet diferite pentru deplasări mari.
Figura 23.7 Analog, pentru bara din figura 23.7, cele trei moduri de rezemare sunt echivalente pentru deplasări mici, dar complet diferite pentru deplasări mari.

12.
ASPECTE PRACTICE DE OPTIMIZAREA STRUCTURILOR. CONCENTRATORI DE TENSIUNE
Modele parametrice pentru analiza cu elemente finite Pentru analiza cu elemente finite sunt disponibile numeroase programe de calcul deosebit de performante. Aceste programe au implementate numeroase opŃiuni privind tipurile de analize, facilităŃi de pre- şi post-procesare şi aproape tot ce îşi poate dori un utilizator. Rămâne deschisă însă problema elaborării modelelor de calcul, în sensul că utilizatorului i se cere pricepere şi efort pentru elaborarea unui model de calcul eficient, destinat scopului dorit. Petru marea majoritate a situaŃiilor acest preŃ trebuie plătit - prin efort şi timp - dar se ivesc şi situaŃii când pot fi avute în vedere proceduri de "automatizare" a elaborării modelului de calcul. O astfel de tehnică, a modelului parametric, se poate utiliza pentru analiza cu MEF a pieselor, dispozitivelor, subansamblurilor sau structurilor tipizate, standardizate, sau a acelora care au aceeaşi (sau aproape aceeaşi) configuraŃie geometrică şi o gamă dimensională oarecare.
Procedura modelului parametric În unele programe performante, sunt implementate proceduri de modelare parametrică. În lipsa unei asemenea proceduri, în cazul general, ideea fundamentală a modelului parametric destinat analizei cu elemente finite este ca acestuia să i se asocieze un program de calcul scris într-un limbaj general de programare (C, Pascal, Fortran, Basic) care să calculeze parametrii reŃelei de discretizare şi să scrie toate informaŃiile necesare într-un fişier de intrare pentru programul MEF. Decizia de a elabora un model parametric trebuie luată după o analiză atentă a structurii în cauză şi trebuie avute în vedere cel puŃin următoarele aspecte care să motiveze efortul necesar modelării: - structura trebuie să fie relativ simplă, astfel încât modelul să nu ducă la un volum de muncă prohibitiv; - piesa, dispozitivul, subansamblul etc. real, trebuie să aibă un număr suficient de mare de variante dimensionale, care să justifice modelarea parametrică; - structura reală trebuie să permită elaborarea unui model parametric general, care să includă toate variantele dimensionale şi constructive care interesează; unele variante ale modelului, dacă este cazul, trebuie să se poată obŃine din modelul general atribuind valori nule unora dintre parametri. Principalele etape care trebuie parcurse în vederea elaborării unui model parametric pentru analiza cu MEF sunt : a. Elaborarea desenului complet al structurii reale cu toate cotele notate cu litere; aceste cote devin parametrii modelului. b. Se stabilesc variantele dimensionale şi eventual constructive ale structurii reale. c. Se definesc şirurile de valori ale parametrilor modelului pentru variantele structurii reale. d. Se discretizează structura reală in forma cea mai generală, adică se stabileşte reŃeaua nodurilor, se definesc elementele finite şi se numerotează nodurile şi elementele. Această etapă a elaborării modelului este cea mai importantă şi trebuie realizată cu multă grijă, deoarece discretizarea trebuie să aibă în vedere cel puŃin următoarele aspecte: - scopul analizei cu MEF;
- posibilitatea introducerii condiŃiilor de rezemare şi a sarcinilor; - alegerea tipurilor de elemente finite adecvate rolului funcŃional al structurii reale şi a scopului analizei cu MEF;
- numerotarea nodurilor şi elementelor finite să se facă astfel încât pentru variantele mai simple, nodurile şi elementele la care se renunŃă să fie ultimele.

e. Se stabilesc relaŃiile algebrice de calcul pentru nodurile modelului. Se vor avea în vedere secvenŃe, zone, suprafeŃe, volume, astfel încât scrierea programului de calcul să fie cât mai comodă. f. Se scrie programul de calcul ataşat modelului parametric. Acest program va executa următoarele operaŃii: - citeşte setul de valori ale parametrilor pentru varianta dorită a structurii reale; - calculează coordonatele nodurilor reŃelelor de discretizare; - scrie într-un format adecvat, într-un fişier de intrare pentru programul MEF, coordonatele nodurilor, elementele finite, sarcinile, condiŃiile de rezemare etc. g. Se verifică cu programul MEF corectitudinea modelului şi se efectuează analiza dorită precum şi post-procesările necesare. Trebuie menŃionat faptul că programul de calcul ataşat modelului parametric poate conŃine secvenŃe care să efectueze diverse verificări, să transmită diverse mesaje sau chiar să fie interactiv cu utilizatorul. Modelul de calcul introdus în programul MEF poate fi modificat şi procesat după dorinŃă cu sistemul de comenzi ale acestui program, care aşa cum s-a menŃionat este în prezent un program foarte performant.
Exemplu de model parametric şi utilizarea lui S-a elaborat un model parametric în vederea analizei cu MEF pentru "Suporturi laterale pentru
recipiente" STAS 5455-82. Aceste suporturi se execută în doua tipuri: - I, fără placă intermediară; - II, cu placă intermediară. Fiecare tip de suport poate avea două variante de execuŃie : - A, execuŃie prin îndoire; - B, execuŃie prin sudare din elemente componente.
Figura 15.1 Figura 15.2 SuporŃii au 9 variante dimensionale, definite cu cifre de la 1 la 9. În plus, suporŃii de tip II (cu placă intermediară ) mai au diverse variante ca urmare a posibilităŃii de modificare a grosimii plăcii intermediare . În concluzie, numerele totale de variante ale suporturilor sunt : 6 pentru tip I A; 17 pentru tip II A; 9 pentru tip I B; 27 pentru tip II B, adică în total 59 de variante. Forma geometrică cea mai generală este a suportului tip II B, executat prin sudare, cu placă intermediară. Acest suport este definit prin 13 parametri dimensionali, aşa cum se vede şi în figura 15.1. Discretizarea modelului s-a realizat cu elemente de tip shell cu patru şi trei noduri. S-a avut în vedere ca reŃeaua de discretizare să fie cât mai simplă şi să corespundă unei analize de tensiuni.

Aspectul general al modelului de calcul se prezintă în figura 15.2. Numerele de noduri şi elemente finite ale celor patru variante şi tipuri ale suporŃilor sunt: - suport tip I A: 696 noduri; 666 elemente; - suport tip II A: 731 noduri; 718 elemente; - suport tip I B: 710 noduri; 678 elemente;
- suport tip II B: 745 noduri; 730 elemente. Programul de calcul asociat modelului a fost scris în Turbo Pascal 7. CondiŃiile de încărcare şi rezemare ale modelului pot fi introduse în diverse moduri, în funcŃie de rolul funcŃional concret al suportului. Ín afara sarcinii maxime (dată în STAS 5455-82) aplicată suportului, modelului i se pot aplica şi alte sarcini, ca de exemplu: greutatea proprie, presiune asupra mantalei recipientului, forŃe de frecare pe diverse direcŃii, câmpuri de temperatură etc. Modelul poate fi folosit pentru toate tipurile de analize cu MEF: calculul static ( analiză de tensiuni ), stabilitate, vibraŃii, etc. Tabelul 15.1
D i m e n s i u n i l e s u p o r t u l u i [ mm ]
Mărimea
a
a1
b
b1
b2
c1
c2
h
h1
s1
1
60
45
60
65
50
10
15
85
105
4
2
85
65
80
90
70
15
25
120
145
4
3
105
80
100
110
85
20
30
150
180
6
4
125
90
125
145
110
25
40
180
215
8
5
170
135
160
185
140
30
50
240
290
8
6
210
165
200
230
175
35
60
300
360
10
7
255
205
250
290
220
40
80
360
430
14
8
335
255
320
370
280
60
100
480
575
16
9
420
320
400
470
355
75
120
600
720
22 Valori medii
0.702
0.539
0.677
0.722
0.589
0.124
0.205
1.00
1.20
0.038
M i n
1.16
7.23
1.55
5.05
3.81
10.53
13.94
0.00
0.82
11.95
Para-metrii adi-
men-sionali
A-ba-teri [%]
Max
0.81
5.64
4.24
4.30
3.73
11.85
8.34
0.00
2.57
24.27
Valorile parametrilor care definesc geometria suporturilor laterale pentru cele 9 mărimi ale acestora se dau în tabelul 15.1. S-au calculat şi valorile parametrilor adimensionali definiŃi ca rapoarte ale tuturor dimensiunilor faŃă de dimensiunea h a fiecãrui suport, aceastã dimensiune fiind consideratã fundamentalã. În tabelul 15.1 se dau valorile medii ale parametrilor adimensionali ai suporturilor şi abaterile maxime, în procente, ale acestora faŃã de valoarea medie. Din analiza acestor variaŃii, care pentru unii dintre parametrii adimensionali sunt relativ mari, se poate formula concluzia că trebuie efectuată analiza cu MEF pentru toate cele 59 de variantele tipo - dimensionale ale suporŃilor. În favoarea acestei idei pledează şi faptul că valorile deplasărilor şi tensiunilor nu sunt funcŃii liniare de dimensiunile structurii. Pentru a ilustra convingător principiile modelarii parametrice se prezintă, ca exemplu, rezultatele obŃinute prin analiza cu MEF pentru un suport tip II B, mărimea 5. Raza exterioarã a recipientului s-a

considerat R 1 = 640 mm, grosimea peretelui s = 12 mm, grosimea plãcii intermediare s3 = s =12 mm şi s2=s1=8 mm. S-au avut în vedere patru variante de încărcare: 1 - sarcina de 40 kN pe talpa suportului; 2 - sarcina anterioarã plus o presiune interioarã de 1,5 MPa; 3 - sarcina de 40 kN plus o forŃă de frecare, de 4 kN, pe talpa suportului, de la exterior spre interior; 4 - sarcina de 40 kN, presiunea şi forŃa de frecare. Valorile obŃinute pentru tensiunile echivalente maxime în elemente şi pentru deplasãrile rezultante maxime, pentru cele patru variante de încãrcare, sunt date în tabelul 15.2: Tabelul 15.2
Varianta σech /elem [N/mm 2] δ rezult. max [mm] 1 166 0.268 2 162 0.511 3 159 0.267 4 155 0.512
În figura 15.3 se prezintă forma deformată a suportului, pentru varianta 1 de încărcare, iar în figura 15.4 se arată harta deplasărilor rezultante şi diagrama de variaŃie a acestora în lungul marginii laterale a suportului (linia neagră îngroşată din fig. 15.4).
Figura 15.3 Figura 15.4 Harta tensiunilor nodale şi diagrama variaŃiei lor în lungul unei linii din planul tălpii suportului (linia galbenă), se pot vedea în figura 15.5.
Figura 15.5

Pentru a ilustra marea varietate a tipo-dimensiunilor pe care le pot avea suporturile utilizate în construcŃiile de utilaje cu diverse destinaŃii, în figura 15.6 se prezintă un suport care poate prelua sarcini foarte mari şi modelul său. Se remarcă construcŃia chesonată a suportului şi utilizarea unei plăci intermediare între suportul propriu zis şi mantaua utilajului.
Figura 15.6
Concluzii Tehnica modelului parametric poate constitui - în anumite circumstanŃe - o cale de creştere a eficienŃei modelării şi analizei cu elemente finite pentru structurile mecanice. Modelul parametric are o supleŃe remarcabilă deoarece poate fi introdus - cu modificări minime - în orice program MEF şi poate fi utilizat ca atare sau poate fi definit ca o substructură sau ca un submodel component al unui model oricât de complex. În condiŃiile unor ateliere de proiectare sau grupe de calcul, modelele parametrice elaborate într-un interval de timp pot constitui biblioteci de modele care să fie implementate într-un sistem CAD. Modelele MEF folosite pentru optimizare sunt parŃial parametrice deoarece unele dimensiuni ale modelului şi anume variabilele de proiectare sunt definite prin notaŃii algebrice, urmând ca prin procesul de optimizare să li se determine valorile. Se poate uşor imagina situaŃia în care toŃi parametrii dimensionali ai modelului sunt definiŃi ca variabile de proiectare, ceea ce duce la obŃinerea unui model în întregime parametric, care va avea funcŃiile şi avantajele prezentate mai sus.

13.
SUBMODELARE ŞI SUBSTRUCTURARE
Preocupări pentru a realiza modelări şi analize cu elemente finite cât mai eficiente, adică cu eforturi şi costuri minime, care să ofere cantităŃi maxime de informaŃii, precise şi sigure, au apărut chiar de la primele aplicaŃii ale metodei. Două tehnici (denumite şi metode sau procedee), se folosesc cu mult succes şi anume submodelarea şi substructurarea, mai ales pentru structuri complexe, ale căror modele ajung să aibă zeci sau sute de mii de noduri şi elemente finite. Fiecare dintre acestea are avantajele, dezavantajele şi limitele sale, fiind preferată cînd sunt îndeplinite anumite condiŃii, nici una, nici cealaltă neavând aplicabilitate generală. Notă: Conceptele de submodel şi de substructură prezintă unele deosebiri în accepŃiunea diverşilor utilizatori. În lucrarea de faŃă s-a folosit terminologia cea mai răspândită.
Submodelarea Definirea şi utilizarea unui submodel. După ce s-a realizat un model al unei structuri şi s-a efectuat analiza cu elemente finite (FEA), în urma postprocesării şi evaluării rezultatelor obŃinute, se poate ajunge la concluzia că într-o anumită zonă, “locală”, a modelului (adică de dimensiuni reduse în comparaŃie cu dimensiunile întregului model) s-a ivit una din următoarele situaŃii: - trebuie făcute modificări ale dimensiunlor (de exemplu, a grosimii unei plăci sau a secŃiunii unei bare) deoarece, valorile tensiunilor sau ale deplasărilor locale sunt nesatisfăcătoare (prea mari sau prea mici); - se doreşte ca în zona respectivă să fie modificată discretizarea (să se facă o “rafinare” a discretizării sau să se schimbe tipul elementelor finite) pentru a realiza o determinare mai exactă a stării de tensiuni, care are gradienŃi mari; - în zona respectivă structura are o comportare neliniară, de tip elasto-plastic; - se schimbă configuraŃia locală modelului, ca urmare a unei modificări constructive a structurii; - se doreşte compararea unor variante de proiectare în zona respectivă. În astfel de situaŃii - şi în multe altele - se “extrage” din modelul întregii structuri un submodel al zonei de interes, care se supune modelării şi analizei, ca şi cum acesta ar fi modelul unei structuri independente. Ipoteza pe care se bazează tehnica submodelării este că problema din “interiorul” submodelului este locală, adică modificările efectuate în interiorul submodelului modifică neglijabil mărimile nodale (eforturi şi deplasări) de pe frontiera submodelului. Dacă această condiŃie nu este îndeplinită nu se poate folosi submodelarea, sau submodelul trebuie să fie “corectat”. Procedura obişnuită de submodelare se realizează astfel: - se delimitează submodelul printr-o frontieră, adică prin linii sau suprafeŃe ale reŃelei de discretizare
Figura 12.1

se defineşte un contur închis (o frontieră) în interiorul căruia se află submodelul. Pentru exemplificare se prezintă în figura 12.1 aspectul general al unei structuri (figura 12.1.a) şi modelul său cu elemente finite (figura 12.1.b). În figura 12.1.b a fost desenată cu linii mai groase frontiera submodelului. Acesta se prezintă în detaliu în figura 12.2.
Figura 12.2 - în nodurile de pe frontiera submodelului, care se mai numesc şi noduri comune, deoarece aparŃin atât modelului iniŃial cât şi submodelului, se definesc ca date de intrare valorile deplasărilor sau ale eforturilor nodale, determinate prin analiza modelului structurii; - submodelului i se aplică toate sarcinile pe care le-a avut în modelul structurii; - se fac modificările şi analizele dorite ale submodelului, ca şi când acesta ar fi o structură independentă. Se precizează că în acest proces este de dorit să nu se modifice reŃeaua de discretizare de pe frontieră, adică a nodurilor comune; - se verifică dacă valorile finale ale deplasărilor şi ale eforturilor submodelui în nodurile comune (de pe frontieră), au diferenŃe mari faŃă de cele iniŃiale; - dacă diferenŃele sunt inacceptabile, se reia calculul modelului intregii structurii cu noua configuraŃie a submodelului şi se determină noile valori ale deplasărilor şi eforturilor din nodurile comune; - dacă este cazul, se reia şi analiza submodelului. Procesul se continuă până când valorile mărimilor din nodurile comune pentru modelul întregii structuri şi pentru submodel au valori foarte apropiate (se poate formula un criteriu admisibil pentru pentru cele două serii de valori, de exemplu, ele să nu difere cu mai mult de 10 %). Avantajele submodelării provin din faptul că toate operaŃiile care se fac asupra submodelului sunt mai puŃin laborioase decât dacă ele s-ar face asupra modelului întregii structuri, deoarece submodelul este considerabil mai simplu decât modelul iniŃial şi dimensiunea problemei este, astfel, mult redusă. Substructurarea Conceptul de substructură. Pentru modelarea şi analiza cu elemente finite este relativ frecvent foarte avantajos să se considere că structura este formată din două sau mai multe părŃi sau subregiuni componente, denumite substructuri, care asamblate formează structura dată. Substructurile sunt considerate entităŃi de sine stătătore, care se leagă între ele pe contururile lor. Deci conceptul de substructură este mai general decât cel de submodel, adică o substructură poate fi “utilizată” şi ca submodel şi invers. Tehnica sau metoda substructurării este foarte eficientă pentru structuri de foarte mare complexitate ca, de exemplu, avioane, nave, maşini unelte, vehicule rutiere sau feroviare, utilaje tehnologice, instalaŃii diverse etc. Dacă o substructură se repetă, ea se copiază pentru a “genera” substructurile identice, prin operaŃii de translaŃie şi rotaŃie corespunzătore. Principalele etape ale unei proceduri de substructurare sunt, de obicei, următoarele: a. Structura dată se “divide” în substructuri, adică prin linii sau suprafeŃe, denumite frontiere, se “decupează” subregiuni din ansamblu. Este recomandabil ca substructurile să fie elemente constructive distincte, subansamble sau componente bine “individulizate” din punct de vedere tehnologic, al formei, al materialului, al rolului funcŃional, al echipei de proiectare implicată etc. În acest proces se au în vedere şi sarcinile şi condiŃiile de rezemare, adică fiecare substructură va include şi aceste detalii.

Se va urmări cu atenŃie ca, acolo unde este posibil, să se definească substructuri identice, acestea putând ocupa poziŃii diferite în spaŃiu (rotite sau translatate). b. Substructurile definite sunt “decuplate”, adică se consideră că fiecare substructură este o “entitate” independentă – în principiu – adică fiecăreia i se pot aplica toate procedurile şi tehnicile de modelare şi de analiză disponibile. Este posibil, dacă există motive, ca diverse substructuri să fie modelate şi analizate cu metode diferite de calcul şi operaŃiile respective să fie executate de persoane sau colective diferite. Dacă toate substructurile se modelează cu elemente finite (şi aceasta este situaŃia cea mai frecventă) trebuie avut în vedere ca pe liniile şi suprafeŃele comune uneia sau mai multor substructuri (adică pe liniile şi suprafeŃele de decupare-asamblare) discretizarea să fie aceeaşi şi elementele finite să îndeplinească condiŃiile de compatibilitate de o parte şi de alta a frontierei. Nodurile reŃelei de discretizare situate pe frontiere se numesc noduri comune sau supernoduri iar cele din interiorul substructurilor, noduri reduse, necomune sau interne. În final se obŃine pentru fiecare substructură un model cu elemente finite, ca şi când ar fi o structură de sine stătătore, pentru care se determină matricea de rigiditate şi vectorul sarcinilor nodale. c. Modelele substructurilor se asambleză, adică se asambleză matricele de rigiditate şi vectorii sarcinilor nodale ale acestora pentru a obŃine modelul întregii structuri, procesul fiind identic cu cel de asamblare al elementelor finite obişnuite. Din acest motiv substructurile se mai numesc şi superelemente deoarece, au un număr mai mare de noduri decât elementele obişnuite şi pot avea o configuraŃie oricât de complexă. Dacă toate substructurile sunt de sine stătătoare, atunci se spune că substructurarea s-a făcut pe un singur nivel. Dacă o substructură include şi alte substructuri, atunci se spune că substructurarea s-a făcut pe mai multe niveluri.
Figura 12.3 Un exemplu foarte simplu privind modul în care se pot defini substructurile se prezintă în figura 12.3, în care pentru cremaliera din figura 12.3.a se pot defini şase substructuri ca în figura 12.3.b. Substructura S1 se numeşte substructura de bază sau rădăcină, deoarece substructurile S2 - S6 se asamblează succesiv cu aceasta. În acest caz se spune că substructurarea s-a făcut în paralel.
Figura 12.4 În figura 12.3.c cremaliera s-a descompus în cinci substructuri. În acest caz se spune că substructurarea s-a făcut în serie, fiecare substructură fiind legată de precedenta. În cazul general, ca

cel din figura 12.4.a, cele zece substructuri au fost definite în serie-paralel, sau mixt. În acest caz unele substructuri includ alte substructuri, ceea ce însemnă că substructurarea s-a făcut pe mai multe niveluri. De exemplu, S4 include S5 şi S6, iar S2 include S4 şi S3 etc. În figura 12.4.b este reprezentată schema sau arborele de asamblare a substructurilor (care este doar o variantă dintre o mulŃime posibile), care pune în evidenŃă cele patru niveluri ale substructurării. Pentru capacul din figura 12.1 utilizarea substructurării a dus la modelul din figura 12.5, în care se definesc opt substructuri, dintre care S2 - S4 şi S5 - S7 sunt identice. Se poate observa că S1 este
Figura 12.5 substructura rădăcină, celelalte substructuri asamblându-se direct cu ea, deci modelul s-a obŃinut printr-o substructurare în paralel, pe un singur nivel. Un model al unei structuri complexe, cu un număr mare de noduri, de elemente şi substructuri este prezentat în cadrul subiectului . d. Se formează sistemul de ecuaŃii al modelului întregii structuri şi se rezolvă. e. Rezultatele obŃinute se postprocesează pentru fiecare substructură sau pentru întreaga structură. Condensarea matricei de rigiditate şi a vectorului sarcinilor nodale a unei substructuri este o operaŃie de rezolvare parŃială a sistemului de ecuaŃii al substructurii. Dacă se presupune (pentru simplitatea prezentării) că nodurile substructurii sunt numerotate astfel încăt nodurile comune sunt ultimele şi că metoda de rezolvare a sistemului de ecuaŃii este cea a triunghiularizării Gauss, se poate concepe o procedură simplă prin care rezolvarea sistemului se opreşte când se ajunge la prima ecuaŃie corespunzătore primului grad de libertate geometrică a primului nod comun al substructurii. În acest fel matricea de rigiditate a substructurii s-a redus la gradele de libertate ale nodurilor comune, fiind de dimensiuni mult mai mici decât matricea întregii substructuri. Aceasta se numeşte matricea de
rigiditate redusă sau condensată a substructurii. Efectul condensării şi avantajele pe care le produce este cu atât mai pronunŃat cu cât numărul nodurilor comune este mai mic comparativ cu numărul total al acestora. Schema operaŃiei de condensare a matricei de rigiditate a unei substructuri se prezintă în figura 12.6.
Figura 12.6 Fie sistemul de ecuaŃii al substructurii [K] u = F, (12.1) în care [K] este matricea de rigiditate a substructurii înainte de condensare (figura 12.6.a), reprezentată ca matrice bandă, simetrică, cu lăŃime constantă şi [K*] matricea condensată (figura 12.6.b). Pe schema din figura 12.6 s-au reprzentat următorele mărimi:

N – numărul total al ecuaŃiilor sistemului (12.1); Nr – numărul de ecuaŃii corespunzătore nodurilor reduse (interne); Ns - numărul de ecuaŃii corespunzătore supernodurilor (comune). În vederea realizării condensării, se descompune sistemul (12.1) în
=
s
r
ssTrs
rsrr
s
r
u
u
KK
KK
F
F
sau (figura 12.6.a) Fr = [Krr] ur + [Krs] us (12.2) Fs = [Krs]
T ur + [Kss] us, (12.3) din relaŃia (12.2) se obŃine ur = [Krr]
-1 ( Fr - [Krs] us), şi se înlocuieşte în (12.3) şi astfel rezultă F* = [K*] us, [K*] = [Kss] - [Krs]
T [Krr]-1 [Krs],
F* = Fs - [Krs]T [Krr]
-1 Fs, în care: [K*] este matricea de rigiditate condensată (redusă) a substructurii - această matrice este simetrică; F* - vectorul condensat al sarcinilor nodale. Toate operaŃiile care se fac cu matricele de rigiditate ale substructurilor se pot face cu matrice condensate sau nu, dar pentru structuri complexe, se poate ca dimensiunile mult mai mici ale matricelor condensate să pledeze în favorea utilizării lor. Avantajele substructurării sunt următorele: a. Substruturarea oferă facilităŃi la elaborarea modelului de calcul, deoarece pentru substructurile identice se elaborează un singur model, celelate fiind copiate şi supuse unor translaŃii şi rotaŃii. De asemenea operaŃiile de modelare şi condensare pentru fiecare substructură se pot face de către persoane sau colective independente, coordonate de un supervizor, ceea ce poate reduce considerabil duratele şi costurile. b. Substructurile pot fi “bibliotecate”, înainte sau după condensare, adică se pot înregistra pe un suport magnetic toate informaŃiile privind substructurile şi apoi refolosite pentru modelarea şi analiza unor structuri viitoare. c. Apar facilităŃi la elaborarea unor modele pentru diverse variante constructive sau pentru modificări, deoarece pot fi implicate doar unele substructuri, celelalte nefiind afectate. d. Utilizarea substructurării, cu toate facilităŃile pe care ea le oferă, face posibilă – în condiŃii de maximă eficienŃă - modelarea şi analiza unor structuri de mare complexitate ca, de exemplu: aeronave, poduri, maşini diverse, instalaŃii, nave, rachete, submarine etc. e. Pentru probleme neliniare sau pentru probleme de optimizare va creşte randamentul modelării şi analizei dacă se procesează doar unele substructuri, celelalte nefiind implicate. f. Utilizarea substructurării facilitează operaŃiile de postprocesare şi de evaluare a rezulatelor deoarece aceste operaŃii se fac pentru fiecare substructură separat (se “decuplează”). Substructurile care - la un moment dat - nu prezintă interes, pot rămâne neprocesate. g. Toate operaŃiile pe care le implică un proces de modelare şi analiză la care s-a utilizat o formă de substructurare se pot face conversaŃional, ceea ce măreşte avantajele substructurării.

14.
VERIFICAREA MODELELOR DE CALCUL CU ELEMENTE FINITE
Modelul de calcul şi rezultatele obŃinute cu ajutorul său trebuie supuse unor numeroase teste şi verificări. Scopul acestora este de a “valida” modelul, adică de a determina dacă acesta satisface exigenŃele impuse şi dacă rezultatele obŃinute cu ajutorul lui permit formularea unor răspunsuri neechivoce la întrebările clare puse de beneficiarul analizei cu elemente finite (FEA). Unele teste şi verificări sunt calitative şi globale, altele cantitative şi de detaliu. Dacă testele şi verificările duc la concluzii nefavorabile, modelul trebuie îmbunătăŃit şi procesul de verificare – îmbunătăŃire - verificare se continuă până când se obŃine un model satisfăcător, adică valid. În figura 8.1 este prezentată schema generală a procesului de verificare îmbunătăŃire a modelului de calcul cu elemente finite. În continuare se prezintă câteva metode şi procedee de verificare.
Figura 8.1 Verificările experimentale efectuate pe structura reală sunt cele mai concludente. Astfel de verificări sunt însă, de obicei, ulterioare calculului (după ce s-a proiectat şi executat structura) şi totdeauna sunt costisitoare. O situaŃie specială apare când se expertizează structuri vechi pentru care nu s-au efectuat analize cu elemente finite la proiectare. Se pot face verificări experimentale şi pe modele fizice reduse la scară ale structurii reale, în astfel de cazuri fiind necesară rezolvarea problemelor de modelare şi similitudine. Determinările experimentale permit verificări cantitative ale rezultatelor obŃinute prin calcul şi evaluarea preciziei acestora. Se pot verifica mărimi care provin din comportarea globală a structurii, cum sunt deplasările sau reacŃiunile în reazeme, sau mărimi cu caracter local, cum sunt tensiunile maxime. Efectuarea calculelor pe două sau mai multe modele şi compararea rezultatelor obŃinute. Modelele pot fi de acelaşi tip, adică elaborate pe baza aceleiaşi metode de calcul (de exemplu, metoda elemntelor finite - MEF) sau de tipuri diferite, adică elaborate pe baza unor metode de calcul diferite (de exemplu MEF şi metoda elementelor de frontieră sau o metodă analitică de calcul ).

De exemplu, pentru traversa de egalizare a unui excavator care se deplasează pe o cale de rulare s-au elaborat trei modele MEF: un model de bară (fig. 8.2,a), un model de tip stare plană de tensiuni (fig. 8.2,b) şi un model spaŃial (fg. 8.2,c).
Figura 8.2
Cele trei modele pot fi folosite în etape distincte ale proiectarii, respectiv pentru predimensionare, definitivarea formei constructive şi verificarea finală a structurii obŃinute. Unele dintre rezultatele obŃinute în cele trei variante de analiză, ca de exemplu deplasările maxime ( care sunt mărimi globale ale FEA ) trebuie să aibă valori apropiate. Valorile tensiunilor maxime, în special ale celor locale, pot să difere destul de mult de la un model la altul. Uneori este preferabil să se folosească în paralel modele elaborate pe baza unor metode de calcul diferite, ca de exemplu, modele cu elemente finite şi modele cu elemente de frontieră. Pentru trei dinŃi consecutivi ai roŃii dinŃate din figura 8.3,a s-a utilizat în paralel, în vederea verificării, un model cu elemente finite (fig. 8.3,b) şi un altul cu elemente de frontieră (fig. 8.3,c). În acest caz toate rezultatele obŃinute în urma celor două analize (deplasări, tensiuni, reacŃiuni, etc.) trebuie să aibă valori foarte apropiate.
Figura 8.3
Preprocesarea geometriei modelului MEF este cea mai utilizată şi cea mai eficientă metodă de verificare a geomeriei modelului, a corectitudinii definirii condiŃiilor de rezemare şi a aplicării sarcinilor. Se poate spune că este totdeauna obligatorie. Verificarea constă în citirea fişierului cu datele de intrare pentru programul MEF, preprocesarea informaŃiilor conŃinute în acest fişier şi trasarea unui desen al modelului structurii. Un astfel de exemplu se prezintă în figura 8.4, pentru modelul MEF al unei structuri industriale. Preprocesarea se face, de regulă, în programul MEF, care are module de elaborare a modelului, inclusiv de desenare a acestuia, în diverse condiŃii grafice. Foarte utilă este această verificare pe
parcursul elaborării modelului, în diversele etape ale procesului. În situaŃii deosebite preprocesarea se poate face şi cu alte programe, preferate sau chiar elaborate de utilizator.

Figura 8.4 Figura 8.5 Verificări ale condiŃiilor de simetrie. Pentru modele care prezintă proprietăŃi de simetrie sau antisimetrie geometrică şi mecanică, rezultatele obŃinute prin calcul - deplasări, tensiuni, reacŃiuni în
reazeme, moduri proprii de flambaj (simetrice sau antisimetrice), moduri proprii de vibraŃii etc. - trebuie să aibă valori egale în punctele simetrice şi valori egale şi semn schimbat în punctele antisimetrice. Pentru suportul din figura 8.5, care are două plane de simetrie – XOY şi YOZ – atât pentru configuraŃia geometrică precum şi pentru reazeme şi sarcini, verificarea corectitudinii modelului MEF se face comparând valorile deplasărilor, tensiunilor şi reacŃiunilor în puncte şi elemente simetrice: aceste valori trebuie să fie egale, mărimile abaterilor putând fi un indiciu cantitativ al preciziei FEA, în ansamblu, adică a metodei, a programului şi a modelului. Verificări printr-un calcul simplu. Uneori este posibil să se verifice unele dintre rezultatele obŃinute cu un anumit model de calcul, considerând un caz de încărcare simplificat, de exemplu o sarcină concentratră, un moment etc. De exemplu, pentru grinzile longitudinale ale utilajului din figura 8.6,
Figura 8.6 Figura 8.7 se poate face un calcul la încovoiere cu relaŃia cunoscută din rezistenŃa materialelor, considerând grinda din figura 8.7 cu secŃiune constantă, încărcată la mijloc cu o sarcină uniform distribuită, rezemată la capete. În acest caz se are în vedere că rigiditatea la încovoiere în plan vertical a celor două grinzi longitudnale este foarte mare, adică efectul corpului recipientului poate fi neglijat în calculul menŃionat. Valorile săgeŃii maxime şi cea a tensiunii la mijlocul grinzii trebuie să fie apropiate de cele obŃinute cu FEA.

Discretizarea adaptivă. Acest procedeu nu este propriu-zis o cale de verificare a corectitudinii modelului FEA, dar poate oferi informaŃii consistente în această privinŃă. Pe de altă parte modelarea adaptivă se face automat, de către programul FEA, dacă sunt îndeplinite anumite condiŃii, ceea ce este foarte comod pentru utilizator. Se elaborează un model iniŃial MEF care se supune unui proces FEA şi se obŃin rezultatele corespunzătore. În programul MEF (dacă acesta are implementată procedura respectivă) se dau comenzile specifice analizei adaptive care constă în elaborarea, pentru modelul inŃial - printr-un proces iterativ - a unei discretizări mai fine (procedura h), utilizarea unor elemente finite de ordin superior, adică cu polinoame de interpolare de grad superior (procedura p), sau combinaŃii ale acestora (procedura h-p). Rezultatele obŃinute pentru noua variantă a modelului sunt mai precise decăt cele iniŃiale. Programul calculeză indicele de precizie al modelului şi când valoarea prescrisă a acestuia este atinsă, procesul iterativ de “rafinare” a reŃelei de discretizare se opreşte. Verificarea modelului constă în compararea rezultatelor obŃinute în cele două variante ale modelului şi anume rezultatele trebuie să fie suficient de apropiate.
Figura 8.8 Figura 8.9
Pentru exemplificare, se prezintă în figura 8.8 modelul iniŃial MEF al unei plăci dreptunghiulare plane, discretizată cu 55 de noduri şi 80 de elemente shell triunghiulare. După aplicarea unei proceduri de “rafinare“ a discretizării (procedura h), modelul are 449 de noduri şi 798 elemente, ca în figura 8.9. Se menŃionează faptul că o procedură de discretizare adaptivă, oricare ar fi ea, nu poate semnala eventuale greşeli sau neajunsuri ale modelului iniŃial, cum ar fi, de exemplu, configuraŃia geometrică de ansamblu, valorile dimensiunilor, alegerea tipului de element finit, impunerea condiŃiilor de reazeme, definirea sarcinilor, introducerea valorilor constantelor elastice şi fizice ale materialului etc.
Verificarea greutăŃii structurii este o verificare globală, obligatorie. Trebuie verificate valorile reacŃiunilor din reazeme şi dacă acestea satisfac ecuaŃiile de echilibru scrise pentru întreaga structură. Dacă este posibil, este bine să se verifice şi poziŃia centrului de greutate al structurii.
Verificări globale şi calitative ale modelului au în vedere configuraŃiile stărilor de tensiuni şi deplasări, semnele lor, ordinul de mărime şi chiar valorile rezultatelor obŃinute. Din practica inginerească şi din experienŃa altor analize se ştie unde sunt zonele cu tensiuni şi deplasări mari, care
Figura 8.10

este configuraŃia structurii deformate şi între ce limite trebuie să se afle valorile mărimilor obŃinute prin FEA. Pentru exemplificare se prezintă în figura 8.10 proiecŃia în plan orizontal a structurii din figura 8.6 deformată, pentru un sistem de sarcini simetrice.
Comentarii, observaŃii, concluzii: Prezentarea, mai sus, a unor modalităŃi de verificare a modelelor MEF, desigur că nu este exhaustivă. Fiecare utilizator poate să-şi imagineze şi alte tehnici şi metode de verificare. Se poate remarca faptul că în lucrarea de faŃă nu s-au făcut nici un fel de menŃiuni cantitative privind condiŃiile de precizie cu care se pot sau trebuie verificate modele MEF. Aceasta nu este o pierdere din vedere ci este rezultatul unei realităŃi şi anume că nu se poate stabili precizia unui model MEF în general, ci toate exigenŃele impuse modelului (inclusiv cele de precizie) depind de particularităŃile concrete, asociate problemei inginereşti care se rezolvă, ca, de exemplu, tipul structurii, scopul FEA, importanŃa structurii, gradul de pericol în cazul unei avarii, tipul solicitării, durata de exploatare etc. De asemenea, trebuie avut în vedere faptul că MEF este aproximativă, ceea ce înseamnă că nu se poate cere modelului mai mult decât poate oferi metoda, rezultatele obŃinute fiind determinate atât de performanŃele modelului cât şi de principiile, ipotezele şi procedurile matematice de calcul incluse în metoda şi în programul cu elemente finite. Toate verificările făcute modelelor cu elemente finite sunt validate în ultimă instanŃă de
intuiŃia şi experienŃa utilizatorului şi atunci când este posibil, experimental.