Curs MSOS Cap. 2 Tehnici de Modelare Si Simulare a Sistemelor V5

of 9
-
Upload
danielvg2892 -
Category
Documents
-
view
22 -
download
0
description
Modelarea , simularea si optimizarea sistemelor - tehnici de modelare
Transcript of Curs MSOS Cap. 2 Tehnici de Modelare Si Simulare a Sistemelor V5
Modelarea Simularea si Optimizarea Sistemelor
2.8 Modelarea, Simularea si Optimizarea Sistemelor Erol Murad-------------------------------------------------------------------------------------------------M.S.O.S. Cap.2 Tehnici de modelare i simulare a sistemelor 2.1 -------------------------------------------------------------------------------------------------
2TEHNICI DE MODELARE I SIMULARE A SISTEMELOR2.1 Modelarea proceselor cu legea conservrii de masei
Plecnd de la constatarea general c n univers cele dou forme de existen a materiei sunt masa i energie rezult , fra prea multe argumente, c bilanul de mas, evident luat la modul general, este una dintre cele mai folosite metode pentru modelarea sistemelor.
In general legea conservrii masei se enun sub forma: Acumulrile de mas ntr-un sistem sunt egale cu diferena dintre intrrile de masa n sistem i ieirile de mas din sistem; sau cu relaia:
(2.a)
Se pot pune n eviden unele aspecte demne de interes
a. Bilanul de mas este aplicat diferit n funcie de tipul materialelor, ca de exemplu:
lichide care sunt incompresibile, caz cnd se poate trece la bilan de volume:
(2.b)
gaze care sunt compresibile;
materiale granulare care au frecri interne mari.
b. Bilanurile de mas duc la modele formate din ecuaii diferentiale liniare, n majoritatea cazurilor.
c. Dac mrimea de ieire a modelului este nivelul, de care depind debitele de intrare i de ieire, se obin ecuaii difereniale neliniare. Liniarizarea se face n jurul punctului de funcionare H0, aspect tipic pentru modelele utilizate n simularea sistemelor automate.
d. Se practic liniarizarea n modelul matematic numeric, n care discretizarea timpului permite aproximri far efecte sesizabile asupra rezultatelor ncercrilor prin simulare.
In contiunare se vor prezenta exemple de realizare a modelelor i programelor de simulare n care se utilizeaz legea conservrii masei.
2.2 Exemplul 1
2.2.1. Descriere sistem
Pentru exemplificare se va realiza un model i un program de simulare pentru un sistem hidraulic simplu pentru care se utilizeaz legea conservrii masei. Sistemul are ca element principal un rezervor n care intr i iese lichid cu debite diferite. Modelul i programul de simulare sunt destinate studiului comportrii sistemului, caracterizat n principal prin nivelul lichidului, pentru diferii parametri constructivi, de reglaj sau perturbaii la intrare i ieire.
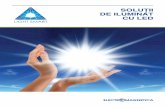
n figura 2.1 este prezentat schema funcional a sistemului. Acesta este format dintr-un rezervor cu diametrul Dr [m] i nlimea Hr (m) n care se gsete ap la nivelul H [m]. n rezervorul intr debitul D1(t) [m2/s] prin robinetul R1 montat pe conducta de intrare n care este o presiune p1[bar], mai mare dect presiunea hidrostatic la fundul rezervorului p2 = (gH. Din rezervor prin robinetul R2 iese un debit D2(t) [m2/s] printr-o conduct legat la un circuit n care presiunea este p2 [bar].
Fig. 2.1 Schema funcional a sistemului
2.2.2 Modelul analitic
Pentru descrierea strii de echilibru dinamic al sistemului studiat se utilizeaz legea conservrii masei sub forma unui bilanul de mase. Se consider procesul izoterm i densitatea lichidului constant ceea ce transform bilanul de mase n bilan de volume.
Variaia volumului de ap din rezervor dV/dt reprezint diferena dintre debitele volumice de intrare D1 i de ieire D2. Ecuaia diferenial pentru bilanul de volume este:
(2.1)
din care se expliciteaz variaia nivelul H al lichidului :
(2.2)
unde:
- S aria seciunii rezervorului:
S = ( Dr2/4 (m2) (2.3)
- p2 este presiunea hidrostatic la fundul rezervorului:
(2.4)
- D1(t) este debitul de intrare n rezervor:
(m2/s ) (2.5)
- D2(t) este debitul de ieire din rezervor:
(m2/s ) (2.6)
- KR1 i KR2 sunt coeficienii de rezisten ai robinetelor R1 i R2 :
(2.7)
unde : KV1 i KV2 sunt coeficienii de debit ai robinetelor R1 i R2.
Inlocuind (6.4) n (6.5) i (6.5) apoi n (6.2) se obine:
(2.8)
Relaia (2.8) este o ecuaie diferenial neliniar. Liniarizarea se poate face analitic, n jurul unui punct de funcionare staionar printr-o schimbare de variabil H(t) = H0 +H(t); soluie care conduce la restrngerea domeniului de simulare Rezult c D1(t) = D2(t) i aplicnd n (2.8) se obine:
(2.9)
Liniarizarea se poate realiza i n modelul numeric, soluie curent utilizat n simularea sistemelor tehnice.
2.2.3 Modelul numeric
Relaia (2.2) este o ecuaie diferenial ordinar de gradul 1, care va fi integrat prin metoda diferenelor finite. Se adopt intervalul de iteraie (t finit i ca urmare se poate scrie pentru pasul k de iterare:
(2.10)
Detaliind i pentru D1[k] i D2[k] se obine :
(2.11)
i:
(2.12)
Inlocuind (2.11) i (2.12) n (2.10) se obine o ecuaie n H[k] implicit care prin explicitare duce la o expresie foarte complicat; sau se poate utiliza pentru determinarea valorii H[k] o metod numeric iterativ de rezolvare.
Considernd c se poate utiliza un t suficient de mic se poate accepta, cu o foarte bun aproximare, nlocuirea n relaiile (2.9) i (2.10) a lui H[k] cu H[k-1] care a fost calculat n pasul anterior. Ca urmare se obine modelul numeric:
(2.13)
Modelul numeric, reprezentat de relaia (2.12), este o relaie liniar, explicit, uor de programat i care consum foarte puin timp i capaciti de calcul. El se introduce n modulul program destinat sistemului de simulat
.
2.2.4 Verificarea modelului
Se aleg date cunoscute pentru:
- presiunea de intrare : p1[1] < 0.5 p1max unde p1max < 5bar;
- presiunea la consumator: p2[1] < 0,210-5gHr (bar);
- debitele de intrare i ieire iniiale : D1[1] = D2[1] SHr /1800 (m2/s);
- coeficienii de debit pentru cele dou robinete KV1 i KV2 :
(2.14 )
Se stabilete o valoare pentru t = 1s i se ruleaz programul. Sistemul trebuie s rmn n regimul staionar impus prin iniializare. Se reiau etapele pentru corectarea erorilor i a omisiunilor pn cnd rularea programul i afiarea datelor simurii sunt corecte.
2.2.5 Validarea programului
Pentru validarea programului se utilizeaz o procedur Intrare1 prin care se aplic un semnal de intrare de tip treapt pentru presiunea p1la k.>50:
(2.15)
unde este un coeficient de semnal treapt.
Se stabilete o valoare pentru t i se ruleaz programul. Pn la k=kT sistemul trebuie s rmn n regimul staionar impus prin iniializare. Dup apariia treptei la intrare sistemul intr ntr-un regim tranzitoriu caracterizat prin creterea nivelului H i stabilizarea acestuia. Dac procesul nu este afiat n ntregime pe ecran se va mrii t, iar dac este afiat concentrat n stnga se mrete t.
Se reiau etapele n succesiunea lor normal pentru corectarea erorilor i a omisiunilor pn cnd rularea programul i afiarea rezultatelor sunt corecte.
2.3 Experimente cu modelul 1 2.3.1 Experimentul 1, cu programul cu varianta C, are ca obiectiv studiul comportrii sistemului n cazul unor perturbaii periodice a presiunii pi de la intrare. Pentru modelarea perturbaiei se va utiliza un semnal sinusoidal cu amplitudinea pi fa de o medie pi[1] i de perioad Tpp pentru i>iprag. Modelarea semnalului de intrare, pentru se face cu relaia:
(2.16)
care este introdus n program prin procedura Intrare2.
Se introduc n procedura Initializare valori pentru: pi[1], pi i Tpp. Se ruleaz programul i se determin valoarea medie a nivelului Hmed la stabilizarea regimului i timpul de stabilizare tstab, precum i raportul Katen dintre amplitudinea relativ a oscilaiei debitului de ieire De[i] i cea a presiunii de intrare pi[i] pentru a se determina nivelul de atenuare la ieire a perturbaiei de la intrare.
Stabilizarea regimului se constat cnd valorile maxime Hmax ale variaiei nivelului H s-au stabilizat ca valoare. Valoarea medie Hmed se calculeaz din media valorilor extreme ale oscilaiei nivelului Hmax stab i Hmin stab, valori determinate din tabloul de date pentru H[i].
(2.17)
Timpul de stabilizare tstab=t(is-iprag) se calculeaz ca diferena dintre momentul aplicrii perturbaiei [iprag] i cel de stabilizare a oscilaiei [is] pentru care se poate determina o variaie Hmax [is](0,05Hmed: (2.18)
Se caut n tabloul H[i] valorile Hmax[i] i se determin is pentru condiia (2.18).
Pentru calculul raportului Katen se determin pentru debitul de ieire De[i] valorile De med i De max stab, n mod similar cu procedura utilizat pentru nivelul H.
Se calculeaz valoarea coeficientului de atenuare Katen cu relaia:
(2.19)
2.4 Exemplul 2
2.4.1. Descriere sistem
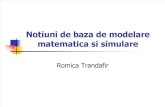
In al doilea exemplu se va studia modelarea i simularea unui sistem format dintr-un rezervor de stocare pentru lichid tehnologic din care se alimenteaz un consumator tehnologic cu un debit Dcons reglat automat n funcie de necesitile procesului tehnologic. Rezervorul este alimentat cu un debit Dpert care poate avea i o variaie aleatoare i cu un debit Dal de la o surs cu presiunea pal prin robinetul de reglare RR comandat de un regulator de debit RD. Schema funcional a sistemului este prezentat n figura 2.2.
Fig. 2.2 Sistem de alimentare cu reglarea automat a debitului de lichid tehnologic
2.4.2 Modelul conceptual
Debitul Dpert, cnd are o variaie aleatoare, are o valoare medie Dpmed pe care se suprapune o variaie aleatoare cu amplitudinea Aper. Modelul este forma:
(m2/s) (2.20)
unde : SAU(t) este o variabil aleatoare uniform distribuit n [0, 1], (capitolul 2).
Se poate utiliza i un model decris de o relaie de recuren de forma:
(2.21)
unde: Kper este un coeficient n domeniul [0,95 ; 0,99].
Debitul de alimentare Dal este determinat de presiunea din reeaua de alimentare i de poziia robinetului de reglare RR:
(2.22)
Debitul de ieire Dcons depinde de valoarea presiunii hidrostatice gH i de valoarea rezistenei circuitului Rcons:
(2.23)
i dac p0 =0 atunci:
(2.24)
Bilanul de mas n sistem se scrie sub forma:
(2.25)
Traductorul de debit este un element liniar, cu ieire n tensiune, al crui modelul numeric este de forma:
(2.26)
Elementul de comparaie :
(2.27)
Regulatorul de debit este de tip PID care are algoritmul de reglare de forma :
(2.28)
Elementul de execuie, robinetul de reglare RR, caracterizat prin coeficientul de debit KV1, are un model numeric de forma:
(2.29)2.4.3 Modelul numeric
Discretizarea n domeniul timp aplicat modelului analitic conduce la obinerea unor relaii din care este format modelul numeric al sistemului de simulat.
Relaiile (2.16) i (2.17) capt forma numeric:
(m2/s) (2.30)
(2.31)
Pentru debitul de alimentare Dal modelul este
(2.32)
Pentru debitul de ieire Dcons modelul numeric este de forma:
(2.32)
Modelul numeric pentru bilanul de mas n sistem se scrie sub forma:
(2.34)
Traductorul de debit are un modelul numeric este de forma:
(2.35)
Elementul de compararie :
(2.36)
Regulatorul de debit este de tip PID care are algoritmul de reglare de forma :
(2.37)
Elementul de execuie, robinetul de reglare RR are un model numeric de forma:
(2.38)
Modelul pentru circuitul de reglare se dezvolt ntr-un modul ReglareDebit, care are ca intrare valoarea debitului Dcons[k] i la ieire valoarea coeficientului de debit KVR[k] al robinetului de reglare RR. Procedura se plaseaz dup procedura (modulul) de calcul a modelului de proces.
2.4.4 Verificarea programului
Pentru operaiunea de verificare se aleg date cunoscute pentru:
nivelul iniial H[1] = 0,6Hr;
presiunea de alimentare : pal = 4(bar);
debitele de intrare sunt constante: Dper[1] = Dal[1] SrHr /1800 (m2/s);
debitul de ieire Dcons[1] = Dper[k] + Dal[k];
referina : r = KTDDcons[1];
coeficientul de debit KVR pentru robinetul RR :
(2.39)
semnalul de comand : u[1] :
(2.40)
Se stabilete o valoare pentru t = 1s i se ruleaz programul. Sistemul trebuie s rmn n regimul staionar impus prin datele de iniializare. Se reiau etapele pentru corectarea erorilor i a omisiunilor pn cnd rularea programul i afiarea datelor simurii sunt corecte.
2.4.5 Validarea programului
Pentru validarea programului se utilizeaz o procedur Intrare1 prin care se aplic un semnal nealeator, de tip treapt, pentru debitul Dpert:
(2.41)
unde este un coeficient de semnal treapt.
Se stabilete o valoare pentru t i se ruleaz programul. Pn la k=kT sistemul trebuie s rmn n regimul staionar impus prin iniializare. Dup apariia treptei la intrare sistemul intr ntr-un regim tranzitoriu caracterizat prin creterea nivelului H i stabilizarea acestuia. Dac procesul nu este afiat n ntregime pe ecran se va mrii t, iar dac este afiat concentrat n stnga se mrete t.
Se reia succesiunea etapelor pentru corectarea erorilor i a omisiunilor pn cnd rularea programul i afiarea rezultatelor sunt corecte.
2.5 Experimente cu modelul 2 2.5.1 Experimentul 2, n programul cu varianta D, are ca obiectiv studiul comportrii sistemului n cazul unor perturbaii cu o variaie aleatoare. Modelarea semnalului aleator de intrare se face cu relaia:
(2.42)
Numrul aleator SAU[i], uniform distribuit n domeniul [0, 1], este generat cu un generator selectat din unitul GENALEAT (Anexa 5). Modelul semnalului de intrare este introdus n program prin procedura Intrare2.
Se introduc n procedura Initializare valori pentru : KT i .
Se ruleaz programul i se determin valoarea medie a nivelului H i timpul de stabilizare, similar ca n experimentul 1. 2.5.2 Experimentul 2, n programul cu varianta D, n condiiile de la experimentul 2, pentru stabilizarea valorii nivelului se monteaz n sistem un circuit de reglarea automat format din : traductor de nivel TH, regulator PID care comand robinetul de reglare R1 cu acionare electric. Modelarea componentelor se face cu relaiile:
- traductorul de nivel :
(2.43)
- elementul de comparaie:
(2.44)
- regulatorul de debit PID cu algoritmul de reglare de forma:
(2.45)- elementul de execuie, robinetul de reglare R1, cu caracteristic liniar:
(2.46)
unde : - umax = 10 V;
- KV100 este valoarea maxim a coeficientului de debit i se calculeaz cu
relaia (2.20) pentru Di[1] = SrHr/900 (m2/s).
Modelul pentru circuitul de reglare se introduce n procedura RegulareNivel care se va apela n procedura ModelSistem nainte de modulul model al funcionrii sistemului.
Se introduc n procedura Initializare valori pentru : KTH, rH, KR, TIR, TDR, umax i KV100. Se ruleaz programul i se determin performanele de reglare pentru diferite valori ale perturbaiilor de la intrare i variante de acordare a regulatorului PID.
_1131256565.unknown
_1131333599.unknown
_1131449565.unknown
_1163177262.unknown
_1163177727.unknown
_1163178233.unknown
_1163239801.unknown
_1163178060.unknown
_1163177684.unknown
_1161930053.unknown
_1163176805.unknown
_1163173839.unknown
_1132319660.unknown
_1161929331.unknown
_1131450251.unknown
_1131360577.unknown
_1131448432.unknown
_1131448798.unknown
_1131449486.unknown
_1131448575.unknown
_1131361159.unknown
_1131448294.unknown
_1131333929.unknown
_1131334077.unknown
_1131334169.unknown
_1131333993.unknown
_1131333663.unknown
_1131333056.unknown
_1131333350.unknown
_1131333577.unknown
_1131333154.unknown
_1131331633.unknown
_1131332886.unknown
_1131330483.unknown
_1131244391.unknown
_1131244536.unknown
_1131247491.unknown
_1131244416.unknown
_1131242389.unknown
_1131243945.unknown
_1131244307.unknown
_1131243069.unknown
_1131243888.unknown
_1131242900.unknown
_1130815390.unknown
_1130815564.unknown
_1131241857.unknown
_1130815538.unknown
_1130814508.unknown