Curs Flotabilitate
9
FLOTABILITATEA NAVEI Definiţie: Flotabilitatea este proprietatea navei de a pluti (de a se menţina la suprafaţa apei – în cazul navelor de suprafaţă respectiv de a se menţine la o anumită adâncime impusă – în cazul submersibilelor). Flotabilitatea studiază plutirea liberă a navei (se exclude acţiunea momentelor perturbatoare exterioare de înclinare). În studiul flotabilităţii se utilizează următorul sistem de axe de coordonate (vezi Fig.1): Originea sistemului de axe de coordonate: PB PD O Axa longitudinală Ox , cu sensul pozitiv spre prova PB PD Ox Axa transversală Oy , cu sensul pozitiv spre bordul tribord PB Oy Axa verticală Oz , cu sensul pozitiv de la PB în sus PD Oz PLANUL DIAMETRAL PLANUL TRANSVERSAL AL CUPLULUI MAESTRU PLANUL PLUTIRII DE PLINA INCARCARE CWL CWL PD PD x x y y z z O O O PLANUL DE BAZA Fig. 1 1. Forţele care acţionează asupra navei aflată în poziţie de repaus pe apă liniştită Asupra unui corp de navă aflat în repaus pe apă liniştită (pe un mediu de navigaţie neperturbat de valuri şi curenţi marini) acţionează două forţe: forţa de greutate forţa de presiune hidrostatică 1.1. Forţa de greutate Un corp de navă are masa totală, , alcătuită dintr-un număr foarte mare de mase elementare, , supuse acţiunii câmpului gravitaţional terestru care se manifestă prin intermediul vectorului, , numit acceleraţie gravitaţională şi care, la fel cu oricare mărime vectorială, este definit de următoarele elemente: modul – variabil, în funcţie de poziţia particulei materiale în raport cu suprafaţa Pământului;
-
Upload
babuta-madalin -
Category
Documents
-
view
12 -
download
5
description
Arhitectura Navala
Transcript of Curs Flotabilitate

FLOTABILITATEA NAVEI
Definiţie: Flotabilitatea este proprietatea navei de a pluti (de a se menţina la
suprafaţa apei – în cazul navelor de suprafaţă respectiv de a se menţine la o anumită adâncime
impusă – în cazul submersibilelor).
Flotabilitatea studiază plutirea liberă a navei (se exclude acţiunea momentelor
perturbatoare exterioare de înclinare).
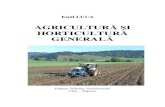
În studiul flotabilităţii se utilizează următorul sistem de axe de coordonate (vezi
Fig.1):
Originea sistemului de axe de coordonate: PBPDO
Axa longitudinală Ox , cu sensul pozitiv spre prova
PBPDOx
Axa transversală Oy , cu sensul pozitiv spre bordul tribord
PBOy Axa verticală Oz , cu sensul pozitiv de la PB în sus
PDOz
PLANUL DIAMETRAL
PLANUL TRANSVERSAL AL CUPLULUI MAESTRU
PLANUL PLUTIRII DE PLINA INCARCARE
CWL CWL
PD
PD
x
x y
y
zz
O O
O
PLANUL DE BAZA
Fig. 1
1. Forţele care acţionează asupra navei aflată în poziţie de repaus pe apă liniştită Asupra unui corp de navă aflat în repaus pe apă liniştită (pe un mediu de navigaţie
neperturbat de valuri şi curenţi marini) acţionează două forţe:
forţa de greutate
forţa de presiune hidrostatică
1.1. Forţa de greutate
Un corp de navă are masa totală, , alcătuită dintr-un număr foarte mare
de mase elementare, , supuse acţiunii câmpului gravitaţional terestru care se manifestă prin
intermediul vectorului, , numit acceleraţie gravitaţională şi care, la fel cu oricare mărime
vectorială, este definit de următoarele elemente:
modul – variabil, în funcţie de poziţia particulei materiale în raport cu suprafaţa
Pământului;

direcţie – aproximativ direcţia razei Pământului;
sens – dirijat către centrul Pământului.
Pe un domeniu restrâns, situat la suprafaţa Pământului, câmpul gravitaţional terestru se
consideră constant, deci se poate neglija variaţia intensităţii şi direcţiei vectorului acceleraţie
gravitaţională, acesta fiind considerat a fi dirijat după o direcţie verticală şi având sensul
orientat în jos.
Asupra masei elementare, , acţionează forţa de greutate
Sistemul forţelor paralele elementare de greutate, poate fi înlocuit cu o rezultantă
unică, numită greutate totală a navei şi care este definită de următoarele elemente
caracteristice unei mărimi vectoriale:
punct de aplicaţie - este punctul G, numit centru de greutate al navei şi care
reprezintă centrul forţelor de greutate, , considerate paralele;
modul – este dat de relaţia
direcţie – verticală;
sens – este orientat în jos.
unde, s-a notat cu mărimea totală a forţei de greutate (numită deplasament)
Forma vectorială completă a forţei totale de greutate (numită şi forţă de deplasament)
este:
Punctul de aplicaţie al forţei totale de greutate este, şi se numeşte centru de
greutate. Centrul de greutate, , al navei, are coordonatele .
Observaţie: cota centrului de greutate se notează şi reprezintă distanţa, măsurată
pe direcţie verticală, între planul de bază şi centrul de greutate.
Pentru a se asigura navei, în plan transversal, o poziţionare paralelă cu suprafaţa liberă
a apei, încă din faza de construcţie, se impune o distribuţie a greutăţilor de la bord astfel încât
centrul de greutate să fie conţinut în planul diametral, ceea ce înseamnă că ordonata acestuia
trebuie să fie nulă, . Prin urmare, vectorul de poziţie al punctului de aplicaţie, , al
forţei de greutate totală a navei (forţă de deplasament) are expresia:
Cei doi vectori sunt ilustraţi în Fig. 2.
CW
zz
x y
O O
CW LL),0,( KGxG G ),0,( KGxG G
Gx
KG KG
0Gy
kFG
kKGjoixr GG
kFG
Fig. 2

1.2. Forţa de presiune hidrostatică
Presiunea hidrostatică a mediului de navigaţie, neperturbat de valuri şi curenţi marini,
se exercită pe toată suprafaţa udată a carenei, , şi are o distribuţie spaţială ilustrată în Fig. 3.
CW
zz
x y
O O
CW LL
),0,( KBxB B ),0,( KBxB B
Bx
KB KB
0By
kVFp kVFp
kKBjoixr BB
x
y
z
nx
nz
ny
n
dS
S
Fig. 3
Din suprafaţa udată a carenei s-a detaşat o arie infinit mică, , şi, din analiza
desenului, se observă că normala construită pe această arie infinit mică, face, cu axele
sistemului de coordonate, unghiurile diretoare .
Forţa elementară de presiune hidrostatică, , dispusă după direcţia normalei şi de
sens contrar acesteia, se scrie sub forma
care, proiectată pe axele sistemului de coordonate, devine:
în care s-a ţinut cont că .
Prin integrare, se obţine:
Forma vectorială completă a forţei de presiune hidrostatică (numită şi forţă de
împingere Arhimede) este:
Punctul de aplicaţie al forţei de presiune hidrostatică este, şi se numeşte centru de
carenă. Centrul de carenă, , al navei, are coordonatele .
Observaţie: cota centrului de carenă se notează şi reprezintă distanţa, măsurată pe
direcţie verticală, între planul de bază şi centrul de carenă.
Pentru a se asigura navei, în plan transversal, o poziţionare paralelă cu suprafaţa liberă
a apei, încă din faza de construcţie, volumul carenei este simetric faţă de planul , ceea ce

înseamnă că ordonata centrului de carenă trebuie să fie nulă, . Prin urmare, vectorul de
poziţie al punctului de aplicaţie, , al forţei de presiune hidrostatică (forţă de împingere
Arhimede) are expresia:
Cei doi vectori sunt ilustraţi în Fig. 3.
2. Condiţiile de echilibru mecanic static corespunzătoare navei aflată în poziţie de
repaus pe apă liniştită
Condiţia generală de echilibru mecanic static impune ca torsorul forţelor care
acţionează asupra navei aflată în repaus pe suprafaţa liberă a apei liniştite (pe un mediu de
navigaţie neperturbat de valuri şi curenţi marini) să fie nul.
Aceasta înseamnă:
sau
Prima ecuaţie a sistemului precedent devine:
ceea ce conduce la concluzia că
Condiţie: Pentru ca nava, aflată în repaus pe suprafaţa liberă a apei liniştite (pe un
mediu de navigaţie neperturbat de valuri şi curenţi marini) să fie în echilibru mecanic static,
este necesar ca forţa de greutate este egală cu forţa de presiune hidrostatică (deplasamentul
total al navei este egal cu forţa de împingere Arhimede).
A doua ecuaţie a sistemului se scrie:
=0
Ecuaţia este satisfăcută, dacă şi numai dacă
în condiţiile în care s-a demonstrat anterior că
Condiţie: Pentru ca nava, aflată în repaus pe suprafaţa liberă a apei liniştite (pe un
mediu de navigaţie neperturbat de valuri şi curenţi marini) să fie în echilibru mecanic static,
este necesar ca forţa de greutate şi forţa de presiune hidrostatică să aibă aceeaşi dreaptă suport
(se reţine şi condiţia suplimentară pentru ca nava să se găsească într-o poziţie
paralelă cu suprafaţa liberă a apei liniştitie).

Definiţie: Poziţia navei definită în raport cu suprafaţa liberă a apei se numeşte plutire.
Fig. 4
În Fig.4 s-a considerat un corp de navă căruia i s-a ataşat, solidar în centrul de greutate
G, sistemul mobil de axe de coordonate ''' zyGx (se mişcă odată cu nava) şi o porţiune din
suprafaţa liberă a apei, raportată la sistemul fix de axe de coordonate Gxyz . Planul plutirii
navei este definit de '' yGx iar planul suprafeţei libere a apei, de Gxy . Se observă că, în cazul
cel mai general, nava este înclinată în raport cu suprafaţa liberă a apei, atât în plan
longitudinal, cu unghiul , cât şi în plan transversal cu unghiul .
Definiţie: unghiul de înclinare transversală sau unghiul de bandă, , este unghiul
făcut de o plutire înclinată în plan transversal, cu planul suprafeţei libere a apei liniştite şi se
consideră pozitiv când nava se înclină în bordul tribord, Tb .
Definiţie: unghiul de înclinare longitudinală sau unghiul de asietă, , este unghiul
făcut de o plutire înclinată în plan longitudinal, cu planul suprafeţei libere a apei liniştite şi se
consideră pozitiv când nava se înclină spre prova, Pv .
Observaţie: Înclinarea navei spre prova se numeşte aprovare, iar cea spre pupa
apupare.
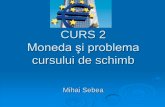
În funcţie de valorile unghiurilor şi , se pot distinge patru tipuri de plutiri ale navei:
- plutirea dreaptă (vezi Fig. 5a);
- plutirea înclinată transversal (vezi Fig. 5b);
- plutirea înclinată longitudinal (vezi Fig. 5c);
- plutirea înclinată oarecare (vezi Fig. 4).

y
y'
0
G
plutire inclinata transversal
(nava inclinata in bordul babord)
yplutire dreapta
G
x
x'
y'
Fig. 5 a
Fig. 5 b
Fig. 5 c
x'
G
x
0
plutire inclinata longitudinal
(nava aprovata)
Plutirea dreaptă
Definiţie: plutirea dreaptă, LW , este plutirea al cărei plan este normal pe PD şi
paralel cu PB (vezi Fig.6)
Poziţia acestei plutiri faţă de PB este definită de relaţia între pescaje
Ecuaţiile de echilibru corespunzătoare plutirii drepte sunt
W
z
y
O
L
BbT TbT
z
x
O
W L
ppTpvTT
Fig. 6

Plutirea înclinată în plan transversal
Definiţie: plutirea înclinată în plan transversal, , este plutirea al cărei plan este
normal pe dar nu este paralel cu PB (vezi Fig.7)
W
zz
x
yO O
L
ppTpvT
BbT TbTT
WW LL
L
W
Fig. 7
Poziţia acestei plutiri faţă de PB este definită de relaţia între pescaje
Ecuaţiile de echilibru corespunzătoare plutirii înclinate în plan transversal sunt
şi au rezultat din analiza Fig.8, în care s-a reprezentat planul înclinării, , cu plutirea dreaptă
şi plutirea înclinată în planul transversal, . Condiţia de echilibru potrivit căreia
forţele de deplasament şi de împingere Arhimede trebuie să aibă aceeaşi dreaptă support, se
respectă dacă triunghiul este dreptunghic în , iar unghiul
O y
z
G
B KG
KB
Gy
By
A
W L
W
L
Fig. 8
Plutirea înclinată în plan longitudinal
Definiţie: plutirea înclinată în plan longitudinal, , este plutirea al cărei plan este
normal pe PD dar nu este paralel cu PB (vezi Fig. 9)
Observaţie: Plutirea înclinată longitudinal, , se intersectează cu plutirea dreaptă,
, după o axă transversală ce trece prin central geometric, , al plutirii drepte .
Poziţia acestei plutiri faţă de PB este definită de relaţia între pescaje

W
zz
x y
OO
W LL
ppT
pvT
BbTTbTT
L
F
Fx
LW
W
Fig. 9
Ecuaţiile de echilibru corespunzătoare plutirii înclinate în plan longitudinal sunt
şi au rezultat din analiza Fig.10, în care s-a reprezentat planul înclinării, , cu plutirea dreaptă
şi plutirea înclinată în planul transversal, . Condiţia de echilibru potrivit căreia
forţele de deplasament şi de împingere Arhimede trebuie să aibă aceeaşi dreaptă support, se
respectă dacă triunghiul este dreptunghic în , iar unghiul
O
z
G
B KG
KB
Gx
Bx
A
W L
W
L
x
Fig.10
Plutirea înclinată oarecare
Definiţie: plutirea înclinată oarecare, , este plutirea al cărei plan nu este paralel cu PB
(vezi Fig.11).
W
zz
x y
O O
WL
L
ppT
pvT
BbT TbTT
LL
F
Fx
LW
W
L
WW
Fig.11
Poziţia acestei plutiri faţă de PB este definită de relaţia între pescaje

Ecuaţiile de echilibru corespunzătoare plutirii înclinate în plan oarecare sunt