Curs 2c Principii 2011

of 6
-
Upload
claudiu-ovidiu -
Category
Documents
-
view
214 -
download
0
Transcript of Curs 2c Principii 2011
-
8/19/2019 Curs 2c Principii 2011
1/13
Geodezie spa ţială Metode de determinare a pozi ţ iei Cap. 4 ____________________________________________________________________________________________
____________________________________________________________________________________________Facultatea de Geodezie Bucure şti ş.l.dr.ing. Tiberiu Rus / 20084.16
4.4 Pozi ţ ionare relativ ă
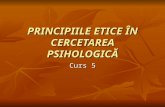
Pozi ţionarea relativ ă are drept scop determinarea pozi ţiei unui punct necunoscut în raport deun punct de coordonate cunoscute. In urma efectu ării unor astfel de observa ţii se determin ă vectoruldintre cele dou ă puncte denumit şi vectorul bazei sau pe scurt, baz ă (b).
Fig.32 Pozi ţionarea relativ ă
Ecua ţia de pozi ţionare relativ ă a punctului B în raport cu punctul A va fi
XB = X A + b AB (4.37)
unde
X
X
Y
Z
X
X
Y
Z
b
X
Y
Z A
Ai
A
A
B
Bi
B
B
AB
AB
AB
AB
− = − = − =∆∆
∆
(4.38)
Pozi ţionarea relativ ă se poate efectua pe baza observa ţiilor cu coduri sau cu ajutorul observa ţ iilor de faz ă (fig.32).
In Geodezia cu Sateli ţi se utilizeaz ă în general al doilea mod de pozi ţionare relativ ă pe bazaunor observa ţii simultane de faz ă în cele dou ă puncte (A şi B).
Receptor B(pozi ţie necunoscut ă)
bAB
A
B
Sat.1
Sat.2Sat.3
Sat.4
Receptor A(pozi ie cunoscut ă)
-
8/19/2019 Curs 2c Principii 2011
2/13
Geodezie spa ţială Metode de determinare a pozi ţ iei Cap. 4 ____________________________________________________________________________________________
____________________________________________________________________________________________Facultatea de Geodezie Bucure şti ş.l.dr.ing. Tiberiu Rus / 20084.17
Ca metode de prelucrare a observa ţiilor se folosesc metode, care în general utilizeaz ă ecua ţ iide diferen ţ e simple, duble şi triple formate pe baza ecua ţ iilor de observa ţ ie primare prezentate încapitolele precedente. Aceste diferen ţe se realizeaz ă cu ajutorul observa ţiilor efectuate în cele dou ă
puncte (A şi B) spre doi sau mai mul ţi sateli ţi (nota ţi j,k,... ) şi momente (epoci) de observa ţiesuccesive (notate t 1 ,t 2 ,... ). Formarea (generarea) acestor tipuri de ecua ţii de observa ţie are drept scop
eliminarea sau reducerea unor erori sistematice ce apar în astfel de m ăsur ători: eroarea de ceas asatelitului, eliminarea ambiguit ăţ ilor şi a efectelor întreruperilor recep ţiei semnalelor satelitare(evenimente “cycle-slip”, engl.).
Se va prezenta în cele ce urmeaz ă modul de realizare (generare) a unor astfel de ecua ţii deobserva ţii “derivate”, în cazul a dou ă puncte (A,B), doi sateli ţi (j,k) şi dou ă epoci succesive (t 1,t2).
4.4.1 Ecua ţii de diferen ţe simple de ecua ţii primare de observa ţii ale fazeipurt ă toarei
Fig.33 Generarea ecua ţiilor de diferen ţe simple între receptoare
Pe baza ecua ţiilor primare (simple, nediferen ţ iate) de observa ţii de faz ă de forma
punct A: )t ( f )t ( N )t ( 1 )t ( f )t ( A j
A j
A j j j
A j ∆ ρ
λ ∆φ ⋅−+⋅=⋅− (4.39)
punct B: )t ( f )t ( N )t ( 1 )t ( f )t ( B j B j B j j j B j ∆ ρ λ ∆φ ⋅−+⋅=⋅−
se ob ţine ecua ţia de diferen ţe simple (între punctele A şi B) de forma:
)]t ( )t ( [ f N N )]t ( )t ( [ 1
)t ( )t ( )t ( A B j
A j
B j
A j
B j
A j
B j
AB j ∆∆ ρ ρ
λ φ φ φ −⋅−−+−⋅=−= (4.40)
sau notând )t ( )t ( )t ( A j B j AB j φ φ φ −= - diferen ţa fazelor m ăsurate în A şi B;
A
j (t)
B
-
8/19/2019 Curs 2c Principii 2011
3/13
Geodezie spa ţială Metode de determinare a pozi ţ iei Cap. 4 ____________________________________________________________________________________________
____________________________________________________________________________________________Facultatea de Geodezie Bucure şti ş.l.dr.ing. Tiberiu Rus / 20084.18
)t ( )t ( )t ( A j B j AB j ρ ρ ρ −= - pseudo-distan ţa AB; (4.41) j A
j B
j AB N N N −= - diferen ţa ambiguit ăţ ilor în A şi B;
)t ( )t ( )t ( A B AB ∆∆∆ −= - diferen ţa corec ţiilor de ceas ale celor 2 receptoare,ob ţinem
)t ( f N )t ( 1
)t ( AB j
AB j
AB j
AB j
∆ ρ λ φ ⋅−+⋅= (4.42)
Ca necunoscute în ecua ţia (4.40) avem cele 2 pseudodistan ţe (ce con ţin coordonatele necunoscuteale punctelor A şi B), ambiguit ăţ ile din cele 2 puncte şi corec ţiile ceasurilor receptoarelor. Seobserv ă că în (4.40), coeficien ţii ultimelor 2 tipuri de necunoscute sunt aceia şi pentru oricemăsur ători de faz ă efectuate:
N jA N jB ∆ jB ∆ jA ⇐ necunoscute - Coeficien ţii necunoscutelor sunt -1 1 -f j +f j
Din aceast ă cauz ă ecua ţiile de observa ţie (coloanele coeficien ţilor) de acest tip vor fi lineardependente şi sistemul acestor ecua ţii va avea un defect de rang. Se observ ă că în aceste ecua ţii s-a eliminat corec ţ ia de ceas a satelitului observat (satelitul j).
4.4.2 Ecua ţii de diferen ţe duble de ecua ţii primare de observa ţii ale fazei purt ătoarei
Presupunem în acest caz 2 receptoare A, B şi observa ţii spre 2 sateli ţi j şi k . Vom scrieecua ţia de diferen ţ e simple de observa ţii primare spre cei 2 sateli ţi, conform ecua ţiei (4.42):
)t ( f N )t ( 1
)t ( AB j
AB j
AB j
AB j ∆ ρ
λ φ ⋅−+⋅= (4.43)
)t ( f N )t ( 1
)t ( ABk
ABk
ABk
ABk ∆ ρ
λ φ ⋅−+⋅=
Dac ă scădem cele 2 ecua ţii de mai sus şi presupunem c ă f j=f k (frecven ţele de emisie ale sateli ţilorsunt acelea şi pentru orice satelit al sistemului), ob ţinem
AB j
ABk
AB j
ABk
AB j
ABk N N )]t ( )t ( [
1 )t ( )t ( −+−⋅=− ρ ρ
λ φ φ (4.44)
sau notând )t ( )t ( )t ( AB j ABk AB jk φ φ φ −=
)t ( )t ( )t ( AB jk BB jk AB jk ρ ρ ρ −= (4.45) jk A
jk B
jk AB N N N −=
ob ţinem forma redus ă a ecua ţiei (4.44):
AB jk
AB jk
AB jk N )t ( 1 )t ( +⋅= ρ
λ φ . (4.46)
Se observ ă si în acest caz, c ă din ecua ţia de observa ţii (4.44) s-au eliminat erorile de ceas ale celor2 receptoare (având în vedere c ă observa ţiile sunt simultane şi f j=f k ).
-
8/19/2019 Curs 2c Principii 2011
4/13
Geodezie spa ţială Metode de determinare a pozi ţ iei Cap. 4 ____________________________________________________________________________________________
____________________________________________________________________________________________Facultatea de Geodezie Bucure şti ş.l.dr.ing. Tiberiu Rus / 20084.19
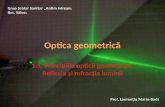
Fig.34 Generarea ecua ţiilor de diferen ţe duble între receptoare şi sateli ţi
4.4.2 Ecua ţii de diferen ţe triple de ecua ţii primare de observa ţii ale fazei purt ătoarei
Acest tip de ecua ţii se formeaz ă prin sc ăderea ecua ţiilor de diferen ţe duble la momente de timp(epoci) succesive (t 1,t2). In acest mod sunt eliminate ambiguit ăţ ile din cadrul parametrilor dedeterminat şi implicit schimb ările de ambiguitate ce pot apare (întreruperi “cycle-slip”).
Presupunem 2 epoci t 1 , t 2 pentru care avem diferen ţe duble de forma:
AB jk
1 AB jk
1 AB jk N )t (
1 )t ( +⋅= ρ
λ φ (4.47)
AB jk
2 AB jk
2 AB jk
N )t ( 1
)t ( +⋅= ρ λ φ (4.48)
Ecua ţia de diferen ţe triple va fi:
)]t ( )t ( [ 1
)t ( )t ( 1 AB jk
2 AB jk
1 AB jk
2 AB jk ρ ρ
λ φ φ −⋅=− (4.49)
sau prescurtat
)t ( 1
)t ( 12 AB jk
12 AB jk ρ
λ φ ⋅= (4.50)
Dac ă în ecua ţia (4.50) revenim la nota ţiile ini ţiale avem
)t ( )t ( )t ( )t (
)t ( )t ( )t ( )t ( )t (
1 A j
1 Ak
1 B j
1 Bk
2 A j
2 Ak
2 B j
2 Bk
12 AB jk
φ φ φ φ
φ φ φ φ φ
−++−−+−−+=
(4.51)
iar
)t ( )t ( )t ( )t (
)t ( )t ( )t ( )t ( )t (
1 A j
1 Ak
1 B j
1 Bk
2 A j
2 Ak
2 B j
2 Bk
12 AB jk
ρ ρ ρ ρ
ρ ρ ρ ρ ρ
−++−−+−−+=
(4.52)
A
j (t)
B
k (t)
-
8/19/2019 Curs 2c Principii 2011
5/13
Geodezie spa ţială Metode de determinare a pozi ţ iei Cap. 4 ____________________________________________________________________________________________
____________________________________________________________________________________________Facultatea de Geodezie Bucure şti ş.l.dr.ing. Tiberiu Rus / 20084.20
Fig.35 Generarea ecua ţiilor de diferen ţe triple între receptoare, sateli ţi şi epoci de observa ţie
4.5 Modelul linear al ecua ţiilor de corec ţie în cazul pozi ţion ării relative
Se va prezenta în continuare modelul linear al ecua ţiilor de corec ţie în cazul observa ţiilor defază pentru pozi ţionare relativ ă. Ca un caz particular se va studia modelul linear al ecua ţiilor decorec ţie de duble diferen ţe. Pe baza acestui model se pot dezvolta modele pentru combina ţii deobserva ţii de faz ă sau pentru modele simplificate de observa ţii cu coduri.
Vom considera ecua ţia de diferen ţe duble de observa ţii de faz ă (4.48) pe care o multiplic ămcu λ şi ob ţinem
A jk
AB jk
AB jk N )t ( )t ( ⋅+=⋅ λ ρ φ λ (4.53)
unde termenul
)t ( )t ( )t ( )t ( )t ( A j Ak B j Bk AB jk ρ ρ ρ ρ ρ +−−+= (4.54)con ţine 4 termeni (m ăsur ători) cu care se formeaz ă o astfel de ecua ţie.Fiecare din cei 4 termeni din rela ţia (4.54) trebuie linearizat (vezi pozi ţionarea absolut ă cu ajutorulcodurilor) ob ţinând o ecua ţie de forma:
A
j (t 1)
B
k (t 1) j (t 2)
k (t 2)
-
8/19/2019 Curs 2c Principii 2011
6/13
Geodezie spa ţială Metode de determinare a pozi ţ iei Cap. 4 ____________________________________________________________________________________________
____________________________________________________________________________________________Facultatea de Geodezie Bucure şti ş.l.dr.ing. Tiberiu Rus / 20084.21
A A
k A
k
A A
j A
j
A A
j A
j
A j
A A
k A
k
A A
k A
k
A A
k A
k
Ak
B B
k B
k
B B
j B
j
B B
j B
j
B j
B B
k B
k
B B
k B
k
B B
k B
k
Bk
AB jk
Z )t (
Z )t ( Z Y
)t (
Y )t ( Y X
)t (
X )t ( X )t (
Z )t (
Z )t ( Z Y )t ( Y )t ( Y X
)t ( X )t ( X )t (
Z )t (
Z )t ( Z Y
)t (
Y )t ( Y X
)t (
X )t ( X )t (
Z )t (
Z )t ( Z Y
)t (
Y )t ( Y X
)t (
X )t ( X )t ( )t (
o
o
o
o
o
oo
o
o
o
o
o
oo
o
o
o
o
o
oo
o
o
o
o
o
oo
∆ ρ
∆ ρ
∆ ρ
ρ
∆ ρ
∆ ρ
∆ ρ
ρ
∆ ρ
∆ ρ
∆ ρ
ρ
∆ ρ
∆ ρ
∆ ρ
ρ ρ
−−
−−
−−−
−−+−+−+−
−−
+−
+−
+−
−−
−−
−−
−+=
(4.55)
Dac ă în (4.55) introducem (not ăm) “coeficien ţii de direc ţie” urm ători
)t (
Z )t ( Z
)t (
Z )t ( Z a;
)t (
Y )t ( Y
)t (
Y )t ( Y a;
)t (
X )t ( X
)t (
X )t ( X a
; )t (
Z )t ( Z
)t (
Z )t ( Z a;
)t (
Y )t ( Y
)t (
Y )t ( Y a;
)t (
X )t ( X
)t (
X )t ( X a
o
o
o
o
Bo
o
o
o
Bo
o
o
o
B
o
o
o
o
Ao
o
o
o
Ao
o
o
o
A
Bk
Bk
Bk
Bk
jk Z
B j
B j
Bk
Bk
jk Y
B j
B j
Bk
Bk
jk X
Ak
Ak
Ak
Ak
jk Z
A j
A j
Ak
Ak
jk Y
A j
A j
Ak
Ak
jk X
ρ ρ ρ ρ ρ ρ
ρ ρ ρ ρ ρ ρ
−+
−−=
−+
−−=
−+
−−=
−−
−+=
−−
−+=
−−
−+=
(4.56)
ob ţinem o ecua ţie linear ă de forma:
AB jk j
Ak
A j
Bk
B
B jk
Z B jk Y B
jk X
A jk
Z A jk Y A
jk X AB
jk
N )t ( )t ( )t ( )t (
Z )t ( aY )t ( a X )t ( a
Z )t ( aY )t ( a X )t ( a )t (
oooo
B B B
B A A
⋅++−−+
+⋅+⋅+⋅+
+⋅+⋅+⋅+=⋅
λ ρ ρ ρ ρ
∆∆∆
∆∆∆φ λ
(4.57)
şi notând termenii liberi
| provizoriivaloridin|observatiidin| )t ( )t ( )t ( )t ( )t ( )t ( l
j Ak A
j Bk B AB jk
jk AB oooo ρ ρ ρ ρ φ λ −++−⋅= (4.58)
ob ţinem ecua ţia de corec ţie (de diferen ţe duble) a pozi ţionării relative sub forma
jk AB
jk AB B
jk Z B
jk Y B
jk X
A jk
Z A jk Y A
jk X
jk AB
N )t ( l Z )t ( aY )t ( a X )t ( a
Z )t ( aY )t ( a X )t ( av
B B B
B A A
⋅+−⋅+⋅+⋅+
+⋅+⋅+⋅+=
λ ∆∆∆
∆∆∆ (4.59)
sau matriceal V = A •X - L (4.60)
Dac ă avem în vedere faptul c ă în cazul pozi ţionării relative un punct din cele dou ă este decoordonate cunoscute (de exemplu, punctul A), atunci
∆XA = ∆YA = ∆ZA = 0(4.61)In acest caz ecua ţia (4.59) are forma (simplificat ă):
)t ( l Z )t ( aY )t ( a X )t ( av*
B B B
jk AB B
jk Z B
jk Y B
jk X
jk AB −⋅+⋅+⋅+= ∆∆∆ (4.62)
-
8/19/2019 Curs 2c Principii 2011
7/13
Geodezie spa ţială Metode de determinare a pozi ţ iei Cap. 4 ____________________________________________________________________________________________
____________________________________________________________________________________________Facultatea de Geodezie Bucure şti ş.l.dr.ing. Tiberiu Rus / 20084.22
unde pentru calculul termenului liber în acest caz se vor utiliza coordonatele cunoscute ale punctuluiA şi nu valorile provizorii (A o):
)t ( )t ( )t ( )t ( )t ( )t ( l j A
k A
j B
k B AB
jk jk AB oo
*
ρ ρ ρ ρ φ λ −++−⋅= (4.63)
• Exemplu de stabilire a ecua ţiilor de corec ţie în cazul diferen ţelor duble de observa ţii de faz ă la pozi ţionarea relativ ă:
Presupunem cazul a 4 sateli ţi j,k,l,m şi 2 epoci de obseva ţie ( t 1 ,t 2). Vom considera c ă satelitul j este satelit de referin ţă.
A
a t a t a t
a t a t a t
a t a t a t
a t a t a t
a t a t a t
a t a t a t
X jk
Y jk
Z jk
X jl Y jl Z jl
X jm
Y jm
Z jk
X jk
Y jk
Z jk
X jl
Y jl
Z jl
X jm
Y jm
Z jk
B B i
B B i
B B B
B B i
B B i
B B B
− =
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
1 1 1
1 1 1
1 1 1
2 2 2
2 2 2
2 2 2
0 0
0 0
0 0
0 0
0 0
0 0
λ
λ
λ
λ
λ
λ
− = − = X
X
Y
Z
N
N
N
L
l t
l t
l t
l t
l t
l t
B
B
B
AB jk
AB jl
AB jm
AB jk
AB jl
AB jm
AB jk
AB jl
AB jm
∆∆∆
( )
( )
( )
( )
( )
( )
1
1
1
2
2
2
(4.64)
4.6 Stabilirea num ărului de ecua ţ ii de observa ţ ie şi al necunoscutelor în cazul pozi ţ ion ării
relative statice
In cadrul observa ţiilor statice se vor presupune 2 receptoare A şi B sta ţionare, careefectueaz ă observa ţii spre un num ăr n j de sateli ţi comuni pe perioada a nt epoci de observa ţiefolosind acela şi interval de înregistrare.
a) Cazul diferen ţelor simple de ecua ţii de observa ţii primare
O ecua ţie de observa ţii de acest tip este generat ă de cele 2 receptoare şi un satelit observat.Dac ă avem n j sateli ţi observa ţi simultan vor rezulta n j ecua ţii.- Dac ă se efectueaz ă observa ţii pe parcursul a nt epoci de înregistrare, atunci num ărul de ecua ţii va fi
n j • n t .Ecua ţia de observa ţii (nelinearizat ă) va fi de forma (4.42):
)t ( f N )t ( 1
)t ( AB j
AB j
AB j
AB j ∆ ρ
λ φ ⋅−+⋅= (4.65)
Nr. de necunoscuteva fi egal cu
( 3 + n j + n t )
-
8/19/2019 Curs 2c Principii 2011
8/13
Geodezie spa ţială Metode de determinare a pozi ţ iei Cap. 4 ____________________________________________________________________________________________
____________________________________________________________________________________________Facultatea de Geodezie Bucure şti ş.l.dr.ing. Tiberiu Rus / 20084.23
3 = coordonate relative ( ∆XB, ∆YB, ∆ZB);n j = nr. ambiguit ăţ i spre cei j sateli ţi observa ţi simultan;nt = nr. diferen ţe corec ţii de ceas ale receptoarelor.
Condi ţia necesar ă pentru a rezolva sistemul de ecua ţii de forma (4.65) va fi:
n j • n t ≥ 3 + n j + n t (4.66)
Din (4.66) rezult ă ca num ărul de epoci de observa ţie nt satisface inegalitatea
nt ≥ n
n j
j
+−
3
1 (4.67)
Cazuri particulare:• Pentru n j = 1 satelit comun observat ⇒ nu exist ă solu ţie !
•
Pentru n j = 2 sateli ţi comuni observa ţi ⇒ n t ≥ 5 epoci de observa ţii ;• Pentru n j = 3 sateli ţi comuni observa ţi ⇒ n t ≥ 3 epoci de observa ţii ;• Pentru n j = 4 sateli ţi comuni observa ţi ⇒ n t > 3 epoci de observa ţii.
Tab.4.1 Nr.sateli ţi
n j
Nr.epocide obs.
nt
Nr. ecua ţii
n jnt
Nr. necun.
3+n j+ n t 2 5 10 103 3 9 94 3 12 10
b) Cazul diferen ţelor duble de ecua ţii de observa ţii primare
In acest caz pentru a genera o asfel de ecua ţie sunt necesari 2 sateli ţi. Pentru n j sateli ţi se vorob ţine (n j -1) ecua ţii de diferen ţe duble. Pentru nt epoci de observa ţie se ob ţin un num ăr de (n j -1)• n t ecua ţii de diferen ţe duble.
Num ărul de ecua ţii de diferen ţe duble este (n j -1)• n t .Ecua ţiile de observa ţii (nelinearizate) pentru 2 sateli ţi ( j,k ), 2 receptoare (A,B) şi o epoc ă deînregistrare sunt de forma (4.46)
AB jk
AB jk
AB jk
N )t ( 1
)t ( +⋅= ρ λ φ (4.68) Num ărul de necunoscute va fi 3+(n j -1) :
3 = coordonate relative ( ∆XB, ∆YB, ∆ZB);(n j -1) = nr. de diferen ţe de ambiguit ăţ i.
Ecua ţia de condi ţie între num ărul de ecua ţii şi numarul de necunoscute va fi în acest caz:(n j -1)n t ≥ 3 + (n j - 1) (4.69)
-
8/19/2019 Curs 2c Principii 2011
9/13
Geodezie spa ţială Metode de determinare a pozi ţ iei Cap. 4 ____________________________________________________________________________________________
____________________________________________________________________________________________Facultatea de Geodezie Bucure şti ş.l.dr.ing. Tiberiu Rus / 20084.24
Din (4.69) rezult ă că num ărul de epoci de observa ţie nt satisface inegalitatea
nt ≥ n
n j
j
+−
2
1 (4.70)
Cazuri particulare:• Pentru n j = 1 satelit comun observat ⇒ nu exist ă solu ţie !• Pentru n j = 2 sateli ţi comuni observa ţi ⇒ n t ≥ 4 epoci de observa ţii;• Pentru n j = 3 sateli ţi comuni observa ţi ⇒ n t ≥ 3 epoci de observa ţii;• Pentru n j = 4 sateli ţi comuni observa ţi ⇒ n t ≥ 2 epoci de observa ţii.
Tab.4.2 Nr.sateli ţi
n j
Nr.epocide obs.
nt
Nr. ecua ţii
(n j-1)n t
Nr. necun.
3+(n j-1)
2 4 4 43 3 6 54 2 6 6
• Pentru a nu genera ecua ţii de observa ţii linear dependente se alege un satelit de referin ţă fa ţă decare se formeaz ă ecua ţiile de observa ţii spre ceilal ţi sateli ţi.
Exemplu: sateli ţii observa ţi - PRN03, PRN05, PRN12, PRN31 având ca satelit de referin ţă PRN05; Se formeaz ă ecua ţiile de diferen ţe duble între satelitul de referin ţă şi ceilal ţi sateli ţi(PRN03-PRN05), (PRN12-PRN05), (PRN31-PRN05) pentru fiecare epoc ă de observa ţie. Seobserv ă că ecua ţia de diferen ţe duble de forma (PRN03-PRN12) este o combina ţie linear ă acelorlalte ecua ţii (PRN03-PRN05) şi (PRN12-PRN05).
c) Cazul diferen ţelor triple de ecua ţii de observa ţii primare
Pentru a genera o asfel de ecua ţie sunt necesare minim 2 epoci de observa ţie. Pentru nt epocide observa ţie se pot forma (n t -1) ecua ţii de observa ţii independente . Pentru n j sateli ţi se obtin unnum ăr de (n j -1)• (n t -1) ecua ţii independente de diferen ţe triple.
Nr. de ecua ţii de diferen ţe triple este (n j -1)• (n t -1). Nr. de necunoscute este egal cu 3 (numai coordonatele relative).
Ecua ţia de condi ţie între num ărul de ecua ţii şi numarul de necunoscute va fi în acest caz(n j -1)(n t-1) ≥ 3 (4.71)
Din (4.71) rezult ă că num ărul de epoci de observa ţie nt satisface aceea şi inegalitate ca şi în cazuldiferen ţelor duble:
nt ≥ n
n j
j
+−
2
1 (4.72)
-
8/19/2019 Curs 2c Principii 2011
10/13
Geodezie spa ţială Metode de determinare a pozi ţ iei Cap. 4 ____________________________________________________________________________________________
____________________________________________________________________________________________Facultatea de Geodezie Bucure şti ş.l.dr.ing. Tiberiu Rus / 20084.25
Cazuri particulare:• Pentru n j = 1 satelit comun observat ⇒ nu exist ă solu ţie !• Pentru n j = 2 sateli ţi comuni observa ţi ⇒ n t ≥ 4 epoci de observa ţii;• Pentru n j = 3 sateli ţi comuni observa ţi ⇒ n t ≥ 3 epoci de observa ţii;• Pentru n j = 4 sateli ţi comuni observa ţi ⇒ n t ≥ 2 epoci de observa ţii.
Tab.4.3 Nr.sateli ţi
n j
Nr.epocide obs.
nt
Nr. ecua ţii
(n j-1)(n t-1)
Nr. necun.
32 4 3 33 3 4 34 2 3 3
4.7 Stabilirea num ărului de ecua ţii de observa ţ ie şi al necunoscutelor în cazulpozi ţ ion ării relative cinematice
In cazul observa ţiilor GPS cinematice, pozi ţia receptorului se schimb ă de la o epoc ă la alta,astfel încât num ărul necunoscutelor de determinat este mult mai mare decât în cazul observa ţiilorstatice.
In ecua ţiile de observa ţii, la pozi ţionarea relativ ă static ă , pozi ţia receptorului B(necunoscut ă) este independent ă de timp:
ρ jB(t) = 2B j2B j2B j )Z(t)(Z)Y(t)(Y)X(t)(X −+−+− (4.73)
pe când în cazul pozi ţionării relative cinematice , pozi ţia receptorului (B) este func ţie de timp:
ρ jB(t) = 2B j2B j2B j (t))Z(t)(Z(t))Y(t)(Y(t))X(t)(X −+−+− (4.74)
In rela ţia (4.73) apar 3 necunoscute pentru fiecare epoc ă de observa ţie [X B(t),Y B(t),Z B(t)].Pentru nt epoci de observa ţii, num ărul necunoscutelor (coordonatelor) va fi egal cu 3 n t .
-
8/19/2019 Curs 2c Principii 2011
11/13
Geodezie spa ţială Metode de determinare a pozi ţ iei Cap. 4 ____________________________________________________________________________________________
____________________________________________________________________________________________Facultatea de Geodezie Bucure şti ş.l.dr.ing. Tiberiu Rus / 20084.26
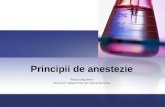
Fig.36 Pozi ţionarea relativ ă cinematic ă
Dac ă consider ăm cazul diferen ţelor simple, duble şi triple de ecua ţii pentru observa ţiirelative cinematice având n j sateli ţi şi 2 puncte (A-fix şi B-mobil), vom avea:
Nr, ecua ţii Nr. necunoscute
• Diferen ţe simple de ec.: n jnt ≥ 3n t + n j + n t (4.75)coordonate ambig. cor.ceas rec . B
de unde ob ţinem condi ţia n t ≥ 4− j
j
n
n (4.75')
• Diferen ţe duble de ec.: (n j-1)n t ≥ 3n t + (n j - 1) (4.76)coordonate ambig.
de unde ob ţinem condi ţia n t ≥ 41
−− j j
nn (4.76')
• Diferen ţe triple de ec.: (n j-1)(n t-1) ≥ 3n t (4.77)coordonate .
de unde ob ţinem condi ţia n t ≥ 4
1
−−
j
j
n
n. (4.77')
Receptor B (mobil)
bAB
A
B(t)
Sat.1
Sat.2Sat.3
Sat.4
Receptor A (fix)
-
8/19/2019 Curs 2c Principii 2011
12/13
Geodezie spa ţială Metode de determinare a pozi ţ iei Cap. 4 ____________________________________________________________________________________________
____________________________________________________________________________________________Facultatea de Geodezie Bucure şti ş.l.dr.ing. Tiberiu Rus / 20084.27
Elementele con ţinute de ecua ţiile (4.75)…(4.77) sunt sintetizate în tabelul de mai jos.
Tab.4.4 Nr. necunoscute
Tip ecua ţii Nr. ecua ţii Coordonate
(X B( t ),Y B( t ),Z B( t ))
Ambiguit ăţ i
(N)
Cor.ceas receptormobil (B)
( ∆ )Diferen ţe simple n jnt 3n t n j n t Diferen ţe duble (n j-1)n t 3n t (n j - 1) -Diferen ţe triple (n j-1)(n t -1) 3n t - -
La pozi ţionarea relativ ă cinematic ă este necesar s ă se determine o pozi ţie la fiecare epoc ă deobserva ţie. Se observ ă că pentru o singur ă epoc ă de observa ţii ( nt =1 ) nu exist ă o solu ţie în
pozi ţionarea relativ ă cinematic ă. Din acest motiv, ecua ţiile de observa ţii (ale fazei purt ătoarei) suntmodificate pentru a reduce num ărul de necunoscute prin eliminarea ambiguit ăţ ilor din categorianecunoscutelor. Se presupune c ă ele sunt determinate printr-o metod ă specific ă (algoritmi dedeterminare a ambiguit ăţ ilor).
Ecua ţiile de observa ţii modificate vor fi de forma:
• Diferen ţe simple de ec.: )()(1)( t f t N t AB j j AB j AB AB j δ ρ λ φ −⋅=− (4.78)
• Diferen ţe duble de ec.: )(1)( t N t jk AB jk AB AB jk ρ λ φ ⋅=− (4.79)
Dac ă ambiguit ăţ ile s-au eliminat din rândul necunoscutelor, atunci num ărul de ecua ţii şinecunoscute pentru nt =1 (la fiecare epoc ă de observa ţii) va fi:
• Diferente simple de ec.: n j ≥ 3⋅1 + 0 + 1 (4.80)coordonate ambig. cor.ceas rec . B
de unde obtinem conditia n j 4 (4.80')
• Diferente duble de ec.: (n j-1) ≥ 3⋅1 + 0 (4.81)coordonate ambig.
de unde ob ţinem condi ţia n j 4 (4.81')
• Diferente triple de ec.: Ecua ţiile de diferen ţe triple pot fi utilizate numai dac ă se cunoa şte pozi ţ iaini ţ ial ă a receptorului mobil. (In caz contrar, din rela ţia (4.77), pentru n t=1 ob ţinem 0 ≥ 3n t=3 !).In acest mod num ărul de ecua ţii de diferen ţe triple va fi (rel. 4.77): (n j-1)(n t-1), iar num ărulnecunoscutelor va fi (3n t-3)=3(n t-1), deoarece am presupus cunoscut ă pozi ţia ini ţială a receptoruluimobil.
Condi ţia de rezolvare a sistemului de ecua ţii de triple diferen ţe va fi:
(n j-1)(n t-1) ≥ 3(n t-1) sau n j 4 pentru ∀nt ≥ 1 (4.82)
-
8/19/2019 Curs 2c Principii 2011
13/13
Geodezie spa ţială Metode de determinare a pozi ţ iei Cap. 4 ____________________________________________________________________________________________
____________________________________________________________________________________________Facultatea de Geodezie Bucure şti ş.l.dr.ing. Tiberiu Rus / 20084.28
Din ecua ţiile (4.80'), (4.81') şi (4.82) rezult ă condi ţ ia fundamental ă a pozi ţ ion ării relativecinematice de a asigura recep ţionarea simultan ă a cel pu ţin 4 sateli ţi.Ecua ţiile (4.78) şi (4.79) pot fi interpretate în cazul pozi ţionării relative cinematice în modulurm ător:
- Se presupune c ă se cunoaste o pozi ţie a receptorului mobil (B) şi prin urmare. vectorul ABini ţial, denumit şi vector de start (ini ţial). Nu este neap ărat necesar ca pozi ţia cunoscut ă areceptorului mobil s ă fie pozi ţia ini ţială a acestui receptor. Dac ă se cunoa şte un vector de start,atunci se poate determina ambiguitatea ( jAB N , respectiv
jk AB N ) şi devin m ărimi cunoscute fiind
denumite "ambiguit ăţ i ini ţ iale" . Aceste "ambiguit ăţ i ini ţiale" sunt utilizate în ecua ţiile deobserva ţii atâta timp cât nu exist ă întreruperi ale semnalului spre cei minim 4 sateli ţi.
- Procesul prin care se determin ă ambiguit ăţ ile initiale se nume şte initializare a observa ţiilorcinematice. Se cunosc mai multe metode de ini ţializare a observa ţiilor cinematice:
- ini ţializare static ă pe un punct de coordonate cunoscute;- ini ţializare static ă pe un punct de coordonate necunoscute;- ini ţializare prin permutarea antenelor ("antenna swap", engl.);- ini ţializare în mi şcare (OTF - "on the fly", engl.).