
CURS 11: Aplicatii Liniare (I) (Operatori Liniari)users.utcluj.ro/~todeacos/curs11I.pdf ·...
149
CURS 11: Aplicat ¸ii Liniare (I) (Operatori Liniari) Cluj-Napoca
Transcript of CURS 11: Aplicatii Liniare (I) (Operatori Liniari)users.utcluj.ro/~todeacos/curs11I.pdf ·...
CURS 11: Aplicatii Liniare (I)(Operatori Liniari)
Cluj-Napoca

Fie KV ,K W doua spatii vectoriale
peste acelasi corp comutativ K .
Definitia 11.1 (Aplicatie liniara)
O functie T ∶ V →W s. n. aplicatie liniara (morfism de spatiivectoriale operator liniar ) daca
T (au + bv) = aT (u) + bT (v), ∀a,b ∈ K ; ∀u, v ∈ V .
Thm 11.2 (nucleul, imaginea)
Fie T ∶K V →K W o aplicatie liniara.
a) Multimea KerT = {v ∈ V ∣T (v) = 0W } este subspatiu ın V ,numit nucleul lui T ;
b) Multimea ImT = {T (v)∣v ∈ V } este subspatiu ın W , numitimaginea lui T ;
c)! Daca dimK V <∞ atunci:
dimK V = dimK(KerT ) + dimK(ImT )
Fie KV ,K W doua spatii vectoriale peste acelasi corp comutativ K .
Definitia 11.1 (Aplicatie liniara)
O functie T ∶ V →W s. n. aplicatie liniara (morfism de spatiivectoriale operator liniar ) daca
T (au + bv) = aT (u) + bT (v), ∀a,b ∈ K ; ∀u, v ∈ V .
Thm 11.2 (nucleul, imaginea)
Fie T ∶K V →K W o aplicatie liniara.
a) Multimea KerT = {v ∈ V ∣T (v) = 0W } este subspatiu ın V ,numit nucleul lui T ;
b) Multimea ImT = {T (v)∣v ∈ V } este subspatiu ın W , numitimaginea lui T ;
c)! Daca dimK V <∞ atunci:
dimK V = dimK(KerT ) + dimK(ImT )
Fie KV ,K W doua spatii vectoriale peste acelasi corp comutativ K .
Definitia 11.1
(Aplicatie liniara)
O functie T ∶ V →W s. n. aplicatie liniara (morfism de spatiivectoriale operator liniar ) daca
T (au + bv) = aT (u) + bT (v), ∀a,b ∈ K ; ∀u, v ∈ V .
Thm 11.2 (nucleul, imaginea)
Fie T ∶K V →K W o aplicatie liniara.
a) Multimea KerT = {v ∈ V ∣T (v) = 0W } este subspatiu ın V ,numit nucleul lui T ;
b) Multimea ImT = {T (v)∣v ∈ V } este subspatiu ın W , numitimaginea lui T ;
c)! Daca dimK V <∞ atunci:
dimK V = dimK(KerT ) + dimK(ImT )
Fie KV ,K W doua spatii vectoriale peste acelasi corp comutativ K .
Definitia 11.1 (Aplicatie liniara)
O functie T ∶ V →W s. n. aplicatie liniara (morfism de spatiivectoriale operator liniar ) daca
T (au + bv) = aT (u) + bT (v), ∀a,b ∈ K ; ∀u, v ∈ V .
Thm 11.2 (nucleul, imaginea)
Fie T ∶K V →K W o aplicatie liniara.
a) Multimea KerT = {v ∈ V ∣T (v) = 0W } este subspatiu ın V ,numit nucleul lui T ;
b) Multimea ImT = {T (v)∣v ∈ V } este subspatiu ın W , numitimaginea lui T ;
c)! Daca dimK V <∞ atunci:
dimK V = dimK(KerT ) + dimK(ImT )
Fie KV ,K W doua spatii vectoriale peste acelasi corp comutativ K .
Definitia 11.1 (Aplicatie liniara)
O functie T ∶ V →W
s. n. aplicatie liniara (morfism de spatiivectoriale operator liniar ) daca
T (au + bv) = aT (u) + bT (v), ∀a,b ∈ K ; ∀u, v ∈ V .
Thm 11.2 (nucleul, imaginea)
Fie T ∶K V →K W o aplicatie liniara.
a) Multimea KerT = {v ∈ V ∣T (v) = 0W } este subspatiu ın V ,numit nucleul lui T ;
b) Multimea ImT = {T (v)∣v ∈ V } este subspatiu ın W , numitimaginea lui T ;
c)! Daca dimK V <∞ atunci:
dimK V = dimK(KerT ) + dimK(ImT )
Fie KV ,K W doua spatii vectoriale peste acelasi corp comutativ K .
Definitia 11.1 (Aplicatie liniara)
O functie T ∶ V →W s. n. aplicatie liniara
(morfism de spatiivectoriale operator liniar ) daca
T (au + bv) = aT (u) + bT (v), ∀a,b ∈ K ; ∀u, v ∈ V .
Thm 11.2 (nucleul, imaginea)
Fie T ∶K V →K W o aplicatie liniara.
a) Multimea KerT = {v ∈ V ∣T (v) = 0W } este subspatiu ın V ,numit nucleul lui T ;
b) Multimea ImT = {T (v)∣v ∈ V } este subspatiu ın W , numitimaginea lui T ;
c)! Daca dimK V <∞ atunci:
dimK V = dimK(KerT ) + dimK(ImT )
Fie KV ,K W doua spatii vectoriale peste acelasi corp comutativ K .
Definitia 11.1 (Aplicatie liniara)
O functie T ∶ V →W s. n. aplicatie liniara (morfism de spatiivectoriale
operator liniar ) daca
T (au + bv) = aT (u) + bT (v), ∀a,b ∈ K ; ∀u, v ∈ V .
Thm 11.2 (nucleul, imaginea)
Fie T ∶K V →K W o aplicatie liniara.
a) Multimea KerT = {v ∈ V ∣T (v) = 0W } este subspatiu ın V ,numit nucleul lui T ;
b) Multimea ImT = {T (v)∣v ∈ V } este subspatiu ın W , numitimaginea lui T ;
c)! Daca dimK V <∞ atunci:
dimK V = dimK(KerT ) + dimK(ImT )
Fie KV ,K W doua spatii vectoriale peste acelasi corp comutativ K .
Definitia 11.1 (Aplicatie liniara)
O functie T ∶ V →W s. n. aplicatie liniara (morfism de spatiivectoriale operator liniar ) daca
T (au + bv) = aT (u) + bT (v), ∀a,b ∈ K ; ∀u, v ∈ V .
Thm 11.2 (nucleul, imaginea)
Fie T ∶K V →K W o aplicatie liniara.
a) Multimea KerT = {v ∈ V ∣T (v) = 0W } este subspatiu ın V ,numit nucleul lui T ;
b) Multimea ImT = {T (v)∣v ∈ V } este subspatiu ın W , numitimaginea lui T ;
c)! Daca dimK V <∞ atunci:
dimK V = dimK(KerT ) + dimK(ImT )
Fie KV ,K W doua spatii vectoriale peste acelasi corp comutativ K .
Definitia 11.1 (Aplicatie liniara)
O functie T ∶ V →W s. n. aplicatie liniara (morfism de spatiivectoriale operator liniar ) daca
T (au + bv) = aT (u) + bT (v),
∀a,b ∈ K ; ∀u, v ∈ V .
Thm 11.2 (nucleul, imaginea)
Fie T ∶K V →K W o aplicatie liniara.
a) Multimea KerT = {v ∈ V ∣T (v) = 0W } este subspatiu ın V ,numit nucleul lui T ;
b) Multimea ImT = {T (v)∣v ∈ V } este subspatiu ın W , numitimaginea lui T ;
c)! Daca dimK V <∞ atunci:
dimK V = dimK(KerT ) + dimK(ImT )
Fie KV ,K W doua spatii vectoriale peste acelasi corp comutativ K .
Definitia 11.1 (Aplicatie liniara)
O functie T ∶ V →W s. n. aplicatie liniara (morfism de spatiivectoriale operator liniar ) daca
T (au + bv) = aT (u) + bT (v), ∀a,b ∈ K ;
∀u, v ∈ V .
Thm 11.2 (nucleul, imaginea)
Fie T ∶K V →K W o aplicatie liniara.
a) Multimea KerT = {v ∈ V ∣T (v) = 0W } este subspatiu ın V ,numit nucleul lui T ;
b) Multimea ImT = {T (v)∣v ∈ V } este subspatiu ın W , numitimaginea lui T ;
c)! Daca dimK V <∞ atunci:
dimK V = dimK(KerT ) + dimK(ImT )
Fie KV ,K W doua spatii vectoriale peste acelasi corp comutativ K .
Definitia 11.1 (Aplicatie liniara)
O functie T ∶ V →W s. n. aplicatie liniara (morfism de spatiivectoriale operator liniar ) daca
T (au + bv) = aT (u) + bT (v), ∀a,b ∈ K ; ∀u, v ∈ V .
Thm 11.2 (nucleul, imaginea)
Fie T ∶K V →K W o aplicatie liniara.
a) Multimea KerT = {v ∈ V ∣T (v) = 0W } este subspatiu ın V ,numit nucleul lui T ;
b) Multimea ImT = {T (v)∣v ∈ V } este subspatiu ın W , numitimaginea lui T ;
c)! Daca dimK V <∞ atunci:
dimK V = dimK(KerT ) + dimK(ImT )
Fie KV ,K W doua spatii vectoriale peste acelasi corp comutativ K .
Definitia 11.1 (Aplicatie liniara)
O functie T ∶ V →W s. n. aplicatie liniara (morfism de spatiivectoriale operator liniar ) daca
T (au + bv) = aT (u) + bT (v), ∀a,b ∈ K ; ∀u, v ∈ V .
Thm 11.2
(nucleul, imaginea)
Fie T ∶K V →K W o aplicatie liniara.
a) Multimea KerT = {v ∈ V ∣T (v) = 0W } este subspatiu ın V ,numit nucleul lui T ;
b) Multimea ImT = {T (v)∣v ∈ V } este subspatiu ın W , numitimaginea lui T ;
c)! Daca dimK V <∞ atunci:
dimK V = dimK(KerT ) + dimK(ImT )
Fie KV ,K W doua spatii vectoriale peste acelasi corp comutativ K .
Definitia 11.1 (Aplicatie liniara)
O functie T ∶ V →W s. n. aplicatie liniara (morfism de spatiivectoriale operator liniar ) daca
T (au + bv) = aT (u) + bT (v), ∀a,b ∈ K ; ∀u, v ∈ V .
Thm 11.2 (nucleul, imaginea)
Fie T ∶K V →K W o aplicatie liniara.
a) Multimea KerT = {v ∈ V ∣T (v) = 0W } este subspatiu ın V ,numit nucleul lui T ;
b) Multimea ImT = {T (v)∣v ∈ V } este subspatiu ın W , numitimaginea lui T ;
c)! Daca dimK V <∞ atunci:
dimK V = dimK(KerT ) + dimK(ImT )
Fie KV ,K W doua spatii vectoriale peste acelasi corp comutativ K .
Definitia 11.1 (Aplicatie liniara)
O functie T ∶ V →W s. n. aplicatie liniara (morfism de spatiivectoriale operator liniar ) daca
T (au + bv) = aT (u) + bT (v), ∀a,b ∈ K ; ∀u, v ∈ V .
Thm 11.2 (nucleul, imaginea)
Fie T ∶K V →K W o aplicatie liniara.
a) Multimea KerT = {v ∈ V ∣T (v) = 0W } este subspatiu ın V ,numit nucleul lui T ;
b) Multimea ImT = {T (v)∣v ∈ V } este subspatiu ın W , numitimaginea lui T ;
c)! Daca dimK V <∞ atunci:
dimK V = dimK(KerT ) + dimK(ImT )
Fie KV ,K W doua spatii vectoriale peste acelasi corp comutativ K .
Definitia 11.1 (Aplicatie liniara)
O functie T ∶ V →W s. n. aplicatie liniara (morfism de spatiivectoriale operator liniar ) daca
T (au + bv) = aT (u) + bT (v), ∀a,b ∈ K ; ∀u, v ∈ V .
Thm 11.2 (nucleul, imaginea)
Fie T ∶K V →K W o aplicatie liniara.
a) Multimea
KerT = {v ∈ V ∣T (v) = 0W } este subspatiu ın V ,numit nucleul lui T ;
b) Multimea ImT = {T (v)∣v ∈ V } este subspatiu ın W , numitimaginea lui T ;
c)! Daca dimK V <∞ atunci:
dimK V = dimK(KerT ) + dimK(ImT )
Fie KV ,K W doua spatii vectoriale peste acelasi corp comutativ K .
Definitia 11.1 (Aplicatie liniara)
O functie T ∶ V →W s. n. aplicatie liniara (morfism de spatiivectoriale operator liniar ) daca
T (au + bv) = aT (u) + bT (v), ∀a,b ∈ K ; ∀u, v ∈ V .
Thm 11.2 (nucleul, imaginea)
Fie T ∶K V →K W o aplicatie liniara.
a) Multimea KerT = {v ∈ V ∣T (v) = 0W }
este subspatiu ın V ,numit nucleul lui T ;
b) Multimea ImT = {T (v)∣v ∈ V } este subspatiu ın W , numitimaginea lui T ;
c)! Daca dimK V <∞ atunci:
dimK V = dimK(KerT ) + dimK(ImT )
Fie KV ,K W doua spatii vectoriale peste acelasi corp comutativ K .
Definitia 11.1 (Aplicatie liniara)
O functie T ∶ V →W s. n. aplicatie liniara (morfism de spatiivectoriale operator liniar ) daca
T (au + bv) = aT (u) + bT (v), ∀a,b ∈ K ; ∀u, v ∈ V .
Thm 11.2 (nucleul, imaginea)
Fie T ∶K V →K W o aplicatie liniara.
a) Multimea KerT = {v ∈ V ∣T (v) = 0W } este subspatiu ın V ,
numit nucleul lui T ;
b) Multimea ImT = {T (v)∣v ∈ V } este subspatiu ın W , numitimaginea lui T ;
c)! Daca dimK V <∞ atunci:
dimK V = dimK(KerT ) + dimK(ImT )
Fie KV ,K W doua spatii vectoriale peste acelasi corp comutativ K .
Definitia 11.1 (Aplicatie liniara)
O functie T ∶ V →W s. n. aplicatie liniara (morfism de spatiivectoriale operator liniar ) daca
T (au + bv) = aT (u) + bT (v), ∀a,b ∈ K ; ∀u, v ∈ V .
Thm 11.2 (nucleul, imaginea)
Fie T ∶K V →K W o aplicatie liniara.
a) Multimea KerT = {v ∈ V ∣T (v) = 0W } este subspatiu ın V ,numit nucleul lui T ;
b) Multimea ImT = {T (v)∣v ∈ V } este subspatiu ın W , numitimaginea lui T ;
c)! Daca dimK V <∞ atunci:
dimK V = dimK(KerT ) + dimK(ImT )
Fie KV ,K W doua spatii vectoriale peste acelasi corp comutativ K .
Definitia 11.1 (Aplicatie liniara)
O functie T ∶ V →W s. n. aplicatie liniara (morfism de spatiivectoriale operator liniar ) daca
T (au + bv) = aT (u) + bT (v), ∀a,b ∈ K ; ∀u, v ∈ V .
Thm 11.2 (nucleul, imaginea)
Fie T ∶K V →K W o aplicatie liniara.
a) Multimea KerT = {v ∈ V ∣T (v) = 0W } este subspatiu ın V ,numit nucleul lui T ;
b) Multimea
ImT = {T (v)∣v ∈ V } este subspatiu ın W , numitimaginea lui T ;
c)! Daca dimK V <∞ atunci:
dimK V = dimK(KerT ) + dimK(ImT )
Fie KV ,K W doua spatii vectoriale peste acelasi corp comutativ K .
Definitia 11.1 (Aplicatie liniara)
O functie T ∶ V →W s. n. aplicatie liniara (morfism de spatiivectoriale operator liniar ) daca
T (au + bv) = aT (u) + bT (v), ∀a,b ∈ K ; ∀u, v ∈ V .
Thm 11.2 (nucleul, imaginea)
Fie T ∶K V →K W o aplicatie liniara.
a) Multimea KerT = {v ∈ V ∣T (v) = 0W } este subspatiu ın V ,numit nucleul lui T ;
b) Multimea ImT = {T (v)∣v ∈ V }
este subspatiu ın W , numitimaginea lui T ;
c)! Daca dimK V <∞ atunci:
dimK V = dimK(KerT ) + dimK(ImT )
Fie KV ,K W doua spatii vectoriale peste acelasi corp comutativ K .
Definitia 11.1 (Aplicatie liniara)
O functie T ∶ V →W s. n. aplicatie liniara (morfism de spatiivectoriale operator liniar ) daca
T (au + bv) = aT (u) + bT (v), ∀a,b ∈ K ; ∀u, v ∈ V .
Thm 11.2 (nucleul, imaginea)
Fie T ∶K V →K W o aplicatie liniara.
a) Multimea KerT = {v ∈ V ∣T (v) = 0W } este subspatiu ın V ,numit nucleul lui T ;
b) Multimea ImT = {T (v)∣v ∈ V } este subspatiu ın W ,
numitimaginea lui T ;
c)! Daca dimK V <∞ atunci:
dimK V = dimK(KerT ) + dimK(ImT )
Fie KV ,K W doua spatii vectoriale peste acelasi corp comutativ K .
Definitia 11.1 (Aplicatie liniara)
O functie T ∶ V →W s. n. aplicatie liniara (morfism de spatiivectoriale operator liniar ) daca
T (au + bv) = aT (u) + bT (v), ∀a,b ∈ K ; ∀u, v ∈ V .
Thm 11.2 (nucleul, imaginea)
Fie T ∶K V →K W o aplicatie liniara.
a) Multimea KerT = {v ∈ V ∣T (v) = 0W } este subspatiu ın V ,numit nucleul lui T ;
b) Multimea ImT = {T (v)∣v ∈ V } este subspatiu ın W , numitimaginea lui T ;
c)! Daca dimK V <∞ atunci:
dimK V = dimK(KerT ) + dimK(ImT )
Fie KV ,K W doua spatii vectoriale peste acelasi corp comutativ K .
Definitia 11.1 (Aplicatie liniara)
O functie T ∶ V →W s. n. aplicatie liniara (morfism de spatiivectoriale operator liniar ) daca
T (au + bv) = aT (u) + bT (v), ∀a,b ∈ K ; ∀u, v ∈ V .
Thm 11.2 (nucleul, imaginea)
Fie T ∶K V →K W o aplicatie liniara.
a) Multimea KerT = {v ∈ V ∣T (v) = 0W } este subspatiu ın V ,numit nucleul lui T ;
b) Multimea ImT = {T (v)∣v ∈ V } este subspatiu ın W , numitimaginea lui T ;
c)! Daca dimK V <∞
atunci:
dimK V = dimK(KerT ) + dimK(ImT )
Fie KV ,K W doua spatii vectoriale peste acelasi corp comutativ K .
Definitia 11.1 (Aplicatie liniara)
O functie T ∶ V →W s. n. aplicatie liniara (morfism de spatiivectoriale operator liniar ) daca
T (au + bv) = aT (u) + bT (v), ∀a,b ∈ K ; ∀u, v ∈ V .
Thm 11.2 (nucleul, imaginea)
Fie T ∶K V →K W o aplicatie liniara.
a) Multimea KerT = {v ∈ V ∣T (v) = 0W } este subspatiu ın V ,numit nucleul lui T ;
b) Multimea ImT = {T (v)∣v ∈ V } este subspatiu ın W , numitimaginea lui T ;
c)! Daca dimK V <∞ atunci:
dimK V = dimK(KerT ) + dimK(ImT )
Fie KV ,K W doua spatii vectoriale peste acelasi corp comutativ K .
Definitia 11.1 (Aplicatie liniara)
O functie T ∶ V →W s. n. aplicatie liniara (morfism de spatiivectoriale operator liniar ) daca
T (au + bv) = aT (u) + bT (v), ∀a,b ∈ K ; ∀u, v ∈ V .
Thm 11.2 (nucleul, imaginea)
Fie T ∶K V →K W o aplicatie liniara.
a) Multimea KerT = {v ∈ V ∣T (v) = 0W } este subspatiu ın V ,numit nucleul lui T ;
b) Multimea ImT = {T (v)∣v ∈ V } este subspatiu ın W , numitimaginea lui T ;
c)! Daca dimK V <∞ atunci:
dimK V = dimK(KerT ) + dimK(ImT )
Fie KV ,K W doua spatii vectoriale peste acelasi corp comutativ K .
Definitia 11.1 (Aplicatie liniara)
O functie T ∶ V →W s. n. aplicatie liniara (morfism de spatiivectoriale operator liniar ) daca
T (au + bv) = aT (u) + bT (v), ∀a,b ∈ K ; ∀u, v ∈ V .
Thm 11.2 (nucleul, imaginea)
Fie T ∶K V →K W o aplicatie liniara.
a) Multimea KerT = {v ∈ V ∣T (v) = 0W } este subspatiu ın V ,numit nucleul lui T ;
b) Multimea ImT = {T (v)∣v ∈ V } este subspatiu ın W , numitimaginea lui T ;
c)! Daca dimK V <∞ atunci:
dimK V = dimK(KerT ) + dimK(ImT )

Thm 11.3
a) L(V ,W ) ∶= {T ∣T ∶ V →W este aplicatie liniara} este unspatiu vectorial;
b) Daca dimK V <∞ si dimK W <∞ atunci
dimK L(V ,W ) = dimK V ⋅ dimK W .
Izomorfisme de spatii vectoriale:
Definitia 11.4 (Izomorfism)
a) O aplicatie liniara T ∶ KV → KW s. n. endomorfism al lui V
L(V ,V ) not= EndK (V );
b) Doua spatii vectoriale KV si KW sunt izomorfe daca∃T ∶ V →W o aplicatie liniara bijectiva. In acest caz T s. n.izomorfism si notam KV ≅K W .
Thm 11.3
a) L(V ,W ) ∶=
{T ∣T ∶ V →W este aplicatie liniara} este unspatiu vectorial;
b) Daca dimK V <∞ si dimK W <∞ atunci
dimK L(V ,W ) = dimK V ⋅ dimK W .
Izomorfisme de spatii vectoriale:
Definitia 11.4 (Izomorfism)
a) O aplicatie liniara T ∶ KV → KW s. n. endomorfism al lui V
L(V ,V ) not= EndK (V );
b) Doua spatii vectoriale KV si KW sunt izomorfe daca∃T ∶ V →W o aplicatie liniara bijectiva. In acest caz T s. n.izomorfism si notam KV ≅K W .
Thm 11.3
a) L(V ,W ) ∶= {T ∣T ∶ V →W este aplicatie liniara}
este unspatiu vectorial;
b) Daca dimK V <∞ si dimK W <∞ atunci
dimK L(V ,W ) = dimK V ⋅ dimK W .
Izomorfisme de spatii vectoriale:
Definitia 11.4 (Izomorfism)
a) O aplicatie liniara T ∶ KV → KW s. n. endomorfism al lui V
L(V ,V ) not= EndK (V );
b) Doua spatii vectoriale KV si KW sunt izomorfe daca∃T ∶ V →W o aplicatie liniara bijectiva. In acest caz T s. n.izomorfism si notam KV ≅K W .
Thm 11.3
a) L(V ,W ) ∶= {T ∣T ∶ V →W este aplicatie liniara} este unspatiu vectorial;
b) Daca dimK V <∞ si dimK W <∞ atunci
dimK L(V ,W ) = dimK V ⋅ dimK W .
Izomorfisme de spatii vectoriale:
Definitia 11.4 (Izomorfism)
a) O aplicatie liniara T ∶ KV → KW s. n. endomorfism al lui V
L(V ,V ) not= EndK (V );
b) Doua spatii vectoriale KV si KW sunt izomorfe daca∃T ∶ V →W o aplicatie liniara bijectiva. In acest caz T s. n.izomorfism si notam KV ≅K W .
Thm 11.3
a) L(V ,W ) ∶= {T ∣T ∶ V →W este aplicatie liniara} este unspatiu vectorial;
b) Daca dimK V <∞
si dimK W <∞ atunci
dimK L(V ,W ) = dimK V ⋅ dimK W .
Izomorfisme de spatii vectoriale:
Definitia 11.4 (Izomorfism)
a) O aplicatie liniara T ∶ KV → KW s. n. endomorfism al lui V
L(V ,V ) not= EndK (V );
b) Doua spatii vectoriale KV si KW sunt izomorfe daca∃T ∶ V →W o aplicatie liniara bijectiva. In acest caz T s. n.izomorfism si notam KV ≅K W .
Thm 11.3
a) L(V ,W ) ∶= {T ∣T ∶ V →W este aplicatie liniara} este unspatiu vectorial;
b) Daca dimK V <∞ si dimK W <∞ atunci
dimK L(V ,W ) = dimK V ⋅ dimK W .
Izomorfisme de spatii vectoriale:
Definitia 11.4 (Izomorfism)
a) O aplicatie liniara T ∶ KV → KW s. n. endomorfism al lui V
L(V ,V ) not= EndK (V );
b) Doua spatii vectoriale KV si KW sunt izomorfe daca∃T ∶ V →W o aplicatie liniara bijectiva. In acest caz T s. n.izomorfism si notam KV ≅K W .
Thm 11.3
a) L(V ,W ) ∶= {T ∣T ∶ V →W este aplicatie liniara} este unspatiu vectorial;
b) Daca dimK V <∞ si dimK W <∞ atunci
dimK L(V ,W ) = dimK V ⋅ dimK W .
Izomorfisme de spatii vectoriale:
Definitia 11.4 (Izomorfism)
a) O aplicatie liniara T ∶ KV → KW s. n. endomorfism al lui V
L(V ,V ) not= EndK (V );
b) Doua spatii vectoriale KV si KW sunt izomorfe daca∃T ∶ V →W o aplicatie liniara bijectiva. In acest caz T s. n.izomorfism si notam KV ≅K W .
Thm 11.3
a) L(V ,W ) ∶= {T ∣T ∶ V →W este aplicatie liniara} este unspatiu vectorial;
b) Daca dimK V <∞ si dimK W <∞ atunci
dimK L(V ,W ) = dimK V ⋅ dimK W .
Izomorfisme de spatii vectoriale:
Definitia 11.4 (Izomorfism)
a) O aplicatie liniara T ∶ KV → KW s. n. endomorfism al lui V
L(V ,V ) not= EndK (V );
b) Doua spatii vectoriale KV si KW sunt izomorfe daca∃T ∶ V →W o aplicatie liniara bijectiva. In acest caz T s. n.izomorfism si notam KV ≅K W .
Thm 11.3
a) L(V ,W ) ∶= {T ∣T ∶ V →W este aplicatie liniara} este unspatiu vectorial;
b) Daca dimK V <∞ si dimK W <∞ atunci
dimK L(V ,W ) = dimK V ⋅ dimK W .
Izomorfisme de spatii vectoriale:
Definitia 11.4
(Izomorfism)
a) O aplicatie liniara T ∶ KV → KW s. n. endomorfism al lui V
L(V ,V ) not= EndK (V );
b) Doua spatii vectoriale KV si KW sunt izomorfe daca∃T ∶ V →W o aplicatie liniara bijectiva. In acest caz T s. n.izomorfism si notam KV ≅K W .
Thm 11.3
a) L(V ,W ) ∶= {T ∣T ∶ V →W este aplicatie liniara} este unspatiu vectorial;
b) Daca dimK V <∞ si dimK W <∞ atunci
dimK L(V ,W ) = dimK V ⋅ dimK W .
Izomorfisme de spatii vectoriale:
Definitia 11.4 (Izomorfism)
a) O aplicatie liniara T ∶ KV → KW s. n. endomorfism al lui V
L(V ,V ) not= EndK (V );
b) Doua spatii vectoriale KV si KW sunt izomorfe daca∃T ∶ V →W o aplicatie liniara bijectiva. In acest caz T s. n.izomorfism si notam KV ≅K W .
Thm 11.3
a) L(V ,W ) ∶= {T ∣T ∶ V →W este aplicatie liniara} este unspatiu vectorial;
b) Daca dimK V <∞ si dimK W <∞ atunci
dimK L(V ,W ) = dimK V ⋅ dimK W .
Izomorfisme de spatii vectoriale:
Definitia 11.4 (Izomorfism)
a) O aplicatie liniara
T ∶ KV → KW s. n. endomorfism al lui V
L(V ,V ) not= EndK (V );
b) Doua spatii vectoriale KV si KW sunt izomorfe daca∃T ∶ V →W o aplicatie liniara bijectiva. In acest caz T s. n.izomorfism si notam KV ≅K W .
Thm 11.3
a) L(V ,W ) ∶= {T ∣T ∶ V →W este aplicatie liniara} este unspatiu vectorial;
b) Daca dimK V <∞ si dimK W <∞ atunci
dimK L(V ,W ) = dimK V ⋅ dimK W .
Izomorfisme de spatii vectoriale:
Definitia 11.4 (Izomorfism)
a) O aplicatie liniara T ∶ KV → KW s. n. endomorfism al lui V
L(V ,V ) not= EndK (V );
b) Doua spatii vectoriale KV si KW sunt izomorfe daca∃T ∶ V →W o aplicatie liniara bijectiva. In acest caz T s. n.izomorfism si notam KV ≅K W .
Thm 11.3
a) L(V ,W ) ∶= {T ∣T ∶ V →W este aplicatie liniara} este unspatiu vectorial;
b) Daca dimK V <∞ si dimK W <∞ atunci
dimK L(V ,W ) = dimK V ⋅ dimK W .
Izomorfisme de spatii vectoriale:
Definitia 11.4 (Izomorfism)
a) O aplicatie liniara T ∶ KV → KW s. n. endomorfism al lui V
L(V ,V ) not= EndK (V );
b) Doua spatii vectoriale KV si KW sunt izomorfe daca∃T ∶ V →W o aplicatie liniara bijectiva. In acest caz T s. n.izomorfism si notam KV ≅K W .
Thm 11.3
a) L(V ,W ) ∶= {T ∣T ∶ V →W este aplicatie liniara} este unspatiu vectorial;
b) Daca dimK V <∞ si dimK W <∞ atunci
dimK L(V ,W ) = dimK V ⋅ dimK W .
Izomorfisme de spatii vectoriale:
Definitia 11.4 (Izomorfism)
a) O aplicatie liniara T ∶ KV → KW s. n. endomorfism al lui V
L(V ,V ) not= EndK (V );
b) Doua spatii vectoriale
KV si KW sunt izomorfe daca∃T ∶ V →W o aplicatie liniara bijectiva. In acest caz T s. n.izomorfism si notam KV ≅K W .
Thm 11.3
a) L(V ,W ) ∶= {T ∣T ∶ V →W este aplicatie liniara} este unspatiu vectorial;
b) Daca dimK V <∞ si dimK W <∞ atunci
dimK L(V ,W ) = dimK V ⋅ dimK W .
Izomorfisme de spatii vectoriale:
Definitia 11.4 (Izomorfism)
a) O aplicatie liniara T ∶ KV → KW s. n. endomorfism al lui V
L(V ,V ) not= EndK (V );
b) Doua spatii vectoriale KV si KW
sunt izomorfe daca∃T ∶ V →W o aplicatie liniara bijectiva. In acest caz T s. n.izomorfism si notam KV ≅K W .
Thm 11.3
a) L(V ,W ) ∶= {T ∣T ∶ V →W este aplicatie liniara} este unspatiu vectorial;
b) Daca dimK V <∞ si dimK W <∞ atunci
dimK L(V ,W ) = dimK V ⋅ dimK W .
Izomorfisme de spatii vectoriale:
Definitia 11.4 (Izomorfism)
a) O aplicatie liniara T ∶ KV → KW s. n. endomorfism al lui V
L(V ,V ) not= EndK (V );
b) Doua spatii vectoriale KV si KW sunt izomorfe daca
∃T ∶ V →W o aplicatie liniara bijectiva. In acest caz T s. n.izomorfism si notam KV ≅K W .
Thm 11.3
a) L(V ,W ) ∶= {T ∣T ∶ V →W este aplicatie liniara} este unspatiu vectorial;
b) Daca dimK V <∞ si dimK W <∞ atunci
dimK L(V ,W ) = dimK V ⋅ dimK W .
Izomorfisme de spatii vectoriale:
Definitia 11.4 (Izomorfism)
a) O aplicatie liniara T ∶ KV → KW s. n. endomorfism al lui V
L(V ,V ) not= EndK (V );
b) Doua spatii vectoriale KV si KW sunt izomorfe daca∃T ∶ V →W o aplicatie liniara bijectiva.
In acest caz T s. n.izomorfism si notam KV ≅K W .
Thm 11.3
a) L(V ,W ) ∶= {T ∣T ∶ V →W este aplicatie liniara} este unspatiu vectorial;
b) Daca dimK V <∞ si dimK W <∞ atunci
dimK L(V ,W ) = dimK V ⋅ dimK W .
Izomorfisme de spatii vectoriale:
Definitia 11.4 (Izomorfism)
a) O aplicatie liniara T ∶ KV → KW s. n. endomorfism al lui V
L(V ,V ) not= EndK (V );
b) Doua spatii vectoriale KV si KW sunt izomorfe daca∃T ∶ V →W o aplicatie liniara bijectiva. In acest caz T s. n.izomorfism
si notam KV ≅K W .
Thm 11.3
a) L(V ,W ) ∶= {T ∣T ∶ V →W este aplicatie liniara} este unspatiu vectorial;
b) Daca dimK V <∞ si dimK W <∞ atunci
dimK L(V ,W ) = dimK V ⋅ dimK W .
Izomorfisme de spatii vectoriale:
Definitia 11.4 (Izomorfism)
a) O aplicatie liniara T ∶ KV → KW s. n. endomorfism al lui V
L(V ,V ) not= EndK (V );
b) Doua spatii vectoriale KV si KW sunt izomorfe daca∃T ∶ V →W o aplicatie liniara bijectiva. In acest caz T s. n.izomorfism si notam KV ≅K W .

EndK (V ) este un K -spatiu vectorial cu:dimK (EndK (V )) = (dimK (V ))2;
(EndK (V ),+, ○) este chiar inel.
Thm. 11.5
Doua spatii vectoriale peste acelasi corp sunt izomorfe daca sinumai daca au aceeasi dimensiune.In particular, daca KV este un spatiu vectorial dedimK V = n⇒ V ≅ Kn.
EndK (V ) este
un K -spatiu vectorial cu:dimK (EndK (V )) = (dimK (V ))2;
(EndK (V ),+, ○) este chiar inel.
Thm. 11.5
Doua spatii vectoriale peste acelasi corp sunt izomorfe daca sinumai daca au aceeasi dimensiune.In particular, daca KV este un spatiu vectorial dedimK V = n⇒ V ≅ Kn.
EndK (V ) este un K -spatiu vectorial cu:
dimK (EndK (V )) = (dimK (V ))2;
(EndK (V ),+, ○) este chiar inel.
Thm. 11.5
Doua spatii vectoriale peste acelasi corp sunt izomorfe daca sinumai daca au aceeasi dimensiune.In particular, daca KV este un spatiu vectorial dedimK V = n⇒ V ≅ Kn.
EndK (V ) este un K -spatiu vectorial cu:dimK (EndK (V )) = (dimK (V ))2;
(EndK (V ),+, ○) este chiar inel.
Thm. 11.5
Doua spatii vectoriale peste acelasi corp sunt izomorfe daca sinumai daca au aceeasi dimensiune.In particular, daca KV este un spatiu vectorial dedimK V = n⇒ V ≅ Kn.
EndK (V ) este un K -spatiu vectorial cu:dimK (EndK (V )) = (dimK (V ))2;
(EndK (V ),+, ○) este chiar inel.
Thm. 11.5
Doua spatii vectoriale peste acelasi corp sunt izomorfe daca sinumai daca au aceeasi dimensiune.In particular, daca KV este un spatiu vectorial dedimK V = n⇒ V ≅ Kn.
EndK (V ) este un K -spatiu vectorial cu:dimK (EndK (V )) = (dimK (V ))2;
(EndK (V ),+, ○) este chiar inel.
Thm. 11.5
Doua spatii vectoriale peste acelasi corp sunt izomorfe daca sinumai daca au aceeasi dimensiune.In particular, daca KV este un spatiu vectorial dedimK V = n⇒ V ≅ Kn.
EndK (V ) este un K -spatiu vectorial cu:dimK (EndK (V )) = (dimK (V ))2;
(EndK (V ),+, ○) este chiar inel.
Thm. 11.5
Doua spatii vectoriale
peste acelasi corp sunt izomorfe daca sinumai daca au aceeasi dimensiune.In particular, daca KV este un spatiu vectorial dedimK V = n⇒ V ≅ Kn.
EndK (V ) este un K -spatiu vectorial cu:dimK (EndK (V )) = (dimK (V ))2;
(EndK (V ),+, ○) este chiar inel.
Thm. 11.5
Doua spatii vectoriale peste acelasi corp
sunt izomorfe daca sinumai daca au aceeasi dimensiune.In particular, daca KV este un spatiu vectorial dedimK V = n⇒ V ≅ Kn.
EndK (V ) este un K -spatiu vectorial cu:dimK (EndK (V )) = (dimK (V ))2;
(EndK (V ),+, ○) este chiar inel.
Thm. 11.5
Doua spatii vectoriale peste acelasi corp sunt izomorfe
daca sinumai daca au aceeasi dimensiune.In particular, daca KV este un spatiu vectorial dedimK V = n⇒ V ≅ Kn.
EndK (V ) este un K -spatiu vectorial cu:dimK (EndK (V )) = (dimK (V ))2;
(EndK (V ),+, ○) este chiar inel.
Thm. 11.5
Doua spatii vectoriale peste acelasi corp sunt izomorfe daca sinumai daca au aceeasi dimensiune.
In particular, daca KV este un spatiu vectorial dedimK V = n⇒ V ≅ Kn.
EndK (V ) este un K -spatiu vectorial cu:dimK (EndK (V )) = (dimK (V ))2;
(EndK (V ),+, ○) este chiar inel.
Thm. 11.5
Doua spatii vectoriale peste acelasi corp sunt izomorfe daca sinumai daca au aceeasi dimensiune.In particular,
daca KV este un spatiu vectorial dedimK V = n⇒ V ≅ Kn.
EndK (V ) este un K -spatiu vectorial cu:dimK (EndK (V )) = (dimK (V ))2;
(EndK (V ),+, ○) este chiar inel.
Thm. 11.5
Doua spatii vectoriale peste acelasi corp sunt izomorfe daca sinumai daca au aceeasi dimensiune.In particular, daca KV este un spatiu vectorial dedimK V = n
⇒ V ≅ Kn.
EndK (V ) este un K -spatiu vectorial cu:dimK (EndK (V )) = (dimK (V ))2;
(EndK (V ),+, ○) este chiar inel.
Thm. 11.5
Doua spatii vectoriale peste acelasi corp sunt izomorfe daca sinumai daca au aceeasi dimensiune.In particular, daca KV este un spatiu vectorial dedimK V = n⇒ V ≅ Kn.
EndK (V ) este un K -spatiu vectorial cu:dimK (EndK (V )) = (dimK (V ))2;
(EndK (V ),+, ○) este chiar inel.
Thm. 11.5
Doua spatii vectoriale peste acelasi corp sunt izomorfe daca sinumai daca au aceeasi dimensiune.In particular, daca KV este un spatiu vectorial dedimK V = n⇒ V ≅ Kn.
Operatorii de proiectie si simetrie:
Proiectie:
Un endomorfism
P ∶ V → V s. n. operator de proiectie dacaP ○ P = P (adica P2 = P ⇐⇒ P este idempotent);
Prop. 11.6 (caracterizarea proiectiilor)
Fie P ∶ V → V un operator de proiectie. Fie
FixP = {v ∈ V ∣F (v) = v}
subspatiilor punctelor fixe. Atunci:
a) FixP este un subspatiuın V si FixP = ImP;
b) V = FixP ⊕KerP;
c) Daca V1,V2 sunt subspatii complementare, V = V1 ⊕V2,exista si este unic un operator de proiectie P ∶ V → V pentrucare ImP = V1 si KerP = V2. (Acest operator s. n.proiectia pe V1, paralela cu V2);
Operatorii de proiectie si simetrie:
Proiectie:
Un endomorfism P ∶ V → V s. n.
operator de proiectie dacaP ○ P = P (adica P2 = P ⇐⇒ P este idempotent);
Prop. 11.6 (caracterizarea proiectiilor)
Fie P ∶ V → V un operator de proiectie. Fie
FixP = {v ∈ V ∣F (v) = v}
subspatiilor punctelor fixe. Atunci:
a) FixP este un subspatiuın V si FixP = ImP;
b) V = FixP ⊕KerP;
c) Daca V1,V2 sunt subspatii complementare, V = V1 ⊕V2,exista si este unic un operator de proiectie P ∶ V → V pentrucare ImP = V1 si KerP = V2. (Acest operator s. n.proiectia pe V1, paralela cu V2);
Operatorii de proiectie si simetrie:
Proiectie:
Un endomorfism P ∶ V → V s. n. operator de proiectie
dacaP ○ P = P (adica P2 = P ⇐⇒ P este idempotent);
Prop. 11.6 (caracterizarea proiectiilor)
Fie P ∶ V → V un operator de proiectie. Fie
FixP = {v ∈ V ∣F (v) = v}
subspatiilor punctelor fixe. Atunci:
a) FixP este un subspatiuın V si FixP = ImP;
b) V = FixP ⊕KerP;
c) Daca V1,V2 sunt subspatii complementare, V = V1 ⊕V2,exista si este unic un operator de proiectie P ∶ V → V pentrucare ImP = V1 si KerP = V2. (Acest operator s. n.proiectia pe V1, paralela cu V2);
Operatorii de proiectie si simetrie:
Proiectie:
Un endomorfism P ∶ V → V s. n. operator de proiectie dacaP ○ P = P
(adica P2 = P ⇐⇒ P este idempotent);
Prop. 11.6 (caracterizarea proiectiilor)
Fie P ∶ V → V un operator de proiectie. Fie
FixP = {v ∈ V ∣F (v) = v}
subspatiilor punctelor fixe. Atunci:
a) FixP este un subspatiuın V si FixP = ImP;
b) V = FixP ⊕KerP;
c) Daca V1,V2 sunt subspatii complementare, V = V1 ⊕V2,exista si este unic un operator de proiectie P ∶ V → V pentrucare ImP = V1 si KerP = V2. (Acest operator s. n.proiectia pe V1, paralela cu V2);
Operatorii de proiectie si simetrie:
Proiectie:
Un endomorfism P ∶ V → V s. n. operator de proiectie dacaP ○ P = P (adica P2 = P ⇐⇒
P este idempotent);
Prop. 11.6 (caracterizarea proiectiilor)
Fie P ∶ V → V un operator de proiectie. Fie
FixP = {v ∈ V ∣F (v) = v}
subspatiilor punctelor fixe. Atunci:
a) FixP este un subspatiuın V si FixP = ImP;
b) V = FixP ⊕KerP;
c) Daca V1,V2 sunt subspatii complementare, V = V1 ⊕V2,exista si este unic un operator de proiectie P ∶ V → V pentrucare ImP = V1 si KerP = V2. (Acest operator s. n.proiectia pe V1, paralela cu V2);
Operatorii de proiectie si simetrie:
Proiectie:
Un endomorfism P ∶ V → V s. n. operator de proiectie dacaP ○ P = P (adica P2 = P ⇐⇒ P este idempotent);
Prop. 11.6 (caracterizarea proiectiilor)
Fie P ∶ V → V un operator de proiectie. Fie
FixP = {v ∈ V ∣F (v) = v}
subspatiilor punctelor fixe. Atunci:
a) FixP este un subspatiuın V si FixP = ImP;
b) V = FixP ⊕KerP;
c) Daca V1,V2 sunt subspatii complementare, V = V1 ⊕V2,exista si este unic un operator de proiectie P ∶ V → V pentrucare ImP = V1 si KerP = V2. (Acest operator s. n.proiectia pe V1, paralela cu V2);
Operatorii de proiectie si simetrie:
Proiectie:
Un endomorfism P ∶ V → V s. n. operator de proiectie dacaP ○ P = P (adica P2 = P ⇐⇒ P este idempotent);
Prop. 11.6 (caracterizarea proiectiilor)
Fie P ∶ V → V un operator de proiectie. Fie
FixP = {v ∈ V ∣F (v) = v}
subspatiilor punctelor fixe. Atunci:
a) FixP este un subspatiuın V si FixP = ImP;
b) V = FixP ⊕KerP;
c) Daca V1,V2 sunt subspatii complementare, V = V1 ⊕V2,exista si este unic un operator de proiectie P ∶ V → V pentrucare ImP = V1 si KerP = V2. (Acest operator s. n.proiectia pe V1, paralela cu V2);
Operatorii de proiectie si simetrie:
Proiectie:
Un endomorfism P ∶ V → V s. n. operator de proiectie dacaP ○ P = P (adica P2 = P ⇐⇒ P este idempotent);
Prop. 11.6 (caracterizarea proiectiilor)
Fie P ∶ V → V
un operator de proiectie. Fie
FixP = {v ∈ V ∣F (v) = v}
subspatiilor punctelor fixe. Atunci:
a) FixP este un subspatiuın V si FixP = ImP;
b) V = FixP ⊕KerP;
c) Daca V1,V2 sunt subspatii complementare, V = V1 ⊕V2,exista si este unic un operator de proiectie P ∶ V → V pentrucare ImP = V1 si KerP = V2. (Acest operator s. n.proiectia pe V1, paralela cu V2);
Operatorii de proiectie si simetrie:
Proiectie:
Un endomorfism P ∶ V → V s. n. operator de proiectie dacaP ○ P = P (adica P2 = P ⇐⇒ P este idempotent);
Prop. 11.6 (caracterizarea proiectiilor)
Fie P ∶ V → V un operator de proiectie.
Fie
FixP = {v ∈ V ∣F (v) = v}
subspatiilor punctelor fixe. Atunci:
a) FixP este un subspatiuın V si FixP = ImP;
b) V = FixP ⊕KerP;
c) Daca V1,V2 sunt subspatii complementare, V = V1 ⊕V2,exista si este unic un operator de proiectie P ∶ V → V pentrucare ImP = V1 si KerP = V2. (Acest operator s. n.proiectia pe V1, paralela cu V2);
Operatorii de proiectie si simetrie:
Proiectie:
Un endomorfism P ∶ V → V s. n. operator de proiectie dacaP ○ P = P (adica P2 = P ⇐⇒ P este idempotent);
Prop. 11.6 (caracterizarea proiectiilor)
Fie P ∶ V → V un operator de proiectie. Fie
FixP =
{v ∈ V ∣F (v) = v}
subspatiilor punctelor fixe. Atunci:
a) FixP este un subspatiuın V si FixP = ImP;
b) V = FixP ⊕KerP;
c) Daca V1,V2 sunt subspatii complementare, V = V1 ⊕V2,exista si este unic un operator de proiectie P ∶ V → V pentrucare ImP = V1 si KerP = V2. (Acest operator s. n.proiectia pe V1, paralela cu V2);
Operatorii de proiectie si simetrie:
Proiectie:
Un endomorfism P ∶ V → V s. n. operator de proiectie dacaP ○ P = P (adica P2 = P ⇐⇒ P este idempotent);
Prop. 11.6 (caracterizarea proiectiilor)
Fie P ∶ V → V un operator de proiectie. Fie
FixP = {v ∈ V ∣F (v) = v}
subspatiilor punctelor fixe.
Atunci:
a) FixP este un subspatiuın V si FixP = ImP;
b) V = FixP ⊕KerP;
c) Daca V1,V2 sunt subspatii complementare, V = V1 ⊕V2,exista si este unic un operator de proiectie P ∶ V → V pentrucare ImP = V1 si KerP = V2. (Acest operator s. n.proiectia pe V1, paralela cu V2);
Operatorii de proiectie si simetrie:
Proiectie:
Un endomorfism P ∶ V → V s. n. operator de proiectie dacaP ○ P = P (adica P2 = P ⇐⇒ P este idempotent);
Prop. 11.6 (caracterizarea proiectiilor)
Fie P ∶ V → V un operator de proiectie. Fie
FixP = {v ∈ V ∣F (v) = v}
subspatiilor punctelor fixe. Atunci:
a) FixP este un subspatiuın V si FixP = ImP;
b) V = FixP ⊕KerP;
c) Daca V1,V2 sunt subspatii complementare, V = V1 ⊕V2,exista si este unic un operator de proiectie P ∶ V → V pentrucare ImP = V1 si KerP = V2. (Acest operator s. n.proiectia pe V1, paralela cu V2);
Operatorii de proiectie si simetrie:
Proiectie:
Un endomorfism P ∶ V → V s. n. operator de proiectie dacaP ○ P = P (adica P2 = P ⇐⇒ P este idempotent);
Prop. 11.6 (caracterizarea proiectiilor)
Fie P ∶ V → V un operator de proiectie. Fie
FixP = {v ∈ V ∣F (v) = v}
subspatiilor punctelor fixe. Atunci:
a) FixP este
un subspatiuın V si FixP = ImP;
b) V = FixP ⊕KerP;
c) Daca V1,V2 sunt subspatii complementare, V = V1 ⊕V2,exista si este unic un operator de proiectie P ∶ V → V pentrucare ImP = V1 si KerP = V2. (Acest operator s. n.proiectia pe V1, paralela cu V2);
Operatorii de proiectie si simetrie:
Proiectie:
Un endomorfism P ∶ V → V s. n. operator de proiectie dacaP ○ P = P (adica P2 = P ⇐⇒ P este idempotent);
Prop. 11.6 (caracterizarea proiectiilor)
Fie P ∶ V → V un operator de proiectie. Fie
FixP = {v ∈ V ∣F (v) = v}
subspatiilor punctelor fixe. Atunci:
a) FixP este un subspatiu
ın V si FixP = ImP;
b) V = FixP ⊕KerP;
c) Daca V1,V2 sunt subspatii complementare, V = V1 ⊕V2,exista si este unic un operator de proiectie P ∶ V → V pentrucare ImP = V1 si KerP = V2. (Acest operator s. n.proiectia pe V1, paralela cu V2);
Operatorii de proiectie si simetrie:
Proiectie:
Un endomorfism P ∶ V → V s. n. operator de proiectie dacaP ○ P = P (adica P2 = P ⇐⇒ P este idempotent);
Prop. 11.6 (caracterizarea proiectiilor)
Fie P ∶ V → V un operator de proiectie. Fie
FixP = {v ∈ V ∣F (v) = v}
subspatiilor punctelor fixe. Atunci:
a) FixP este un subspatiuın V si
FixP = ImP;
b) V = FixP ⊕KerP;
c) Daca V1,V2 sunt subspatii complementare, V = V1 ⊕V2,exista si este unic un operator de proiectie P ∶ V → V pentrucare ImP = V1 si KerP = V2. (Acest operator s. n.proiectia pe V1, paralela cu V2);
Operatorii de proiectie si simetrie:
Proiectie:
Un endomorfism P ∶ V → V s. n. operator de proiectie dacaP ○ P = P (adica P2 = P ⇐⇒ P este idempotent);
Prop. 11.6 (caracterizarea proiectiilor)
Fie P ∶ V → V un operator de proiectie. Fie
FixP = {v ∈ V ∣F (v) = v}
subspatiilor punctelor fixe. Atunci:
a) FixP este un subspatiuın V si FixP = ImP;
b) V = FixP ⊕KerP;
c) Daca V1,V2 sunt subspatii complementare, V = V1 ⊕V2,exista si este unic un operator de proiectie P ∶ V → V pentrucare ImP = V1 si KerP = V2. (Acest operator s. n.proiectia pe V1, paralela cu V2);
Operatorii de proiectie si simetrie:
Proiectie:
Un endomorfism P ∶ V → V s. n. operator de proiectie dacaP ○ P = P (adica P2 = P ⇐⇒ P este idempotent);
Prop. 11.6 (caracterizarea proiectiilor)
Fie P ∶ V → V un operator de proiectie. Fie
FixP = {v ∈ V ∣F (v) = v}
subspatiilor punctelor fixe. Atunci:
a) FixP este un subspatiuın V si FixP = ImP;
b) V = FixP ⊕KerP;
c) Daca V1,V2 sunt subspatii complementare, V = V1 ⊕V2,exista si este unic un operator de proiectie P ∶ V → V pentrucare ImP = V1 si KerP = V2. (Acest operator s. n.proiectia pe V1, paralela cu V2);
Operatorii de proiectie si simetrie:
Proiectie:
Un endomorfism P ∶ V → V s. n. operator de proiectie dacaP ○ P = P (adica P2 = P ⇐⇒ P este idempotent);
Prop. 11.6 (caracterizarea proiectiilor)
Fie P ∶ V → V un operator de proiectie. Fie
FixP = {v ∈ V ∣F (v) = v}
subspatiilor punctelor fixe. Atunci:
a) FixP este un subspatiuın V si FixP = ImP;
b) V = FixP ⊕KerP;
c) Daca V1,V2
sunt subspatii complementare, V = V1 ⊕V2,exista si este unic un operator de proiectie P ∶ V → V pentrucare ImP = V1 si KerP = V2. (Acest operator s. n.proiectia pe V1, paralela cu V2);
Operatorii de proiectie si simetrie:
Proiectie:
Un endomorfism P ∶ V → V s. n. operator de proiectie dacaP ○ P = P (adica P2 = P ⇐⇒ P este idempotent);
Prop. 11.6 (caracterizarea proiectiilor)
Fie P ∶ V → V un operator de proiectie. Fie
FixP = {v ∈ V ∣F (v) = v}
subspatiilor punctelor fixe. Atunci:
a) FixP este un subspatiuın V si FixP = ImP;
b) V = FixP ⊕KerP;
c) Daca V1,V2 sunt subspatii complementare,
V = V1 ⊕V2,exista si este unic un operator de proiectie P ∶ V → V pentrucare ImP = V1 si KerP = V2. (Acest operator s. n.proiectia pe V1, paralela cu V2);
Operatorii de proiectie si simetrie:
Proiectie:
Un endomorfism P ∶ V → V s. n. operator de proiectie dacaP ○ P = P (adica P2 = P ⇐⇒ P este idempotent);
Prop. 11.6 (caracterizarea proiectiilor)
Fie P ∶ V → V un operator de proiectie. Fie
FixP = {v ∈ V ∣F (v) = v}
subspatiilor punctelor fixe. Atunci:
a) FixP este un subspatiuın V si FixP = ImP;
b) V = FixP ⊕KerP;
c) Daca V1,V2 sunt subspatii complementare, V = V1 ⊕V2,
exista si este unic un operator de proiectie P ∶ V → V pentrucare ImP = V1 si KerP = V2. (Acest operator s. n.proiectia pe V1, paralela cu V2);
Operatorii de proiectie si simetrie:
Proiectie:
Un endomorfism P ∶ V → V s. n. operator de proiectie dacaP ○ P = P (adica P2 = P ⇐⇒ P este idempotent);
Prop. 11.6 (caracterizarea proiectiilor)
Fie P ∶ V → V un operator de proiectie. Fie
FixP = {v ∈ V ∣F (v) = v}
subspatiilor punctelor fixe. Atunci:
a) FixP este un subspatiuın V si FixP = ImP;
b) V = FixP ⊕KerP;
c) Daca V1,V2 sunt subspatii complementare, V = V1 ⊕V2,exista si este unic
un operator de proiectie P ∶ V → V pentrucare ImP = V1 si KerP = V2. (Acest operator s. n.proiectia pe V1, paralela cu V2);
Operatorii de proiectie si simetrie:
Proiectie:
Un endomorfism P ∶ V → V s. n. operator de proiectie dacaP ○ P = P (adica P2 = P ⇐⇒ P este idempotent);
Prop. 11.6 (caracterizarea proiectiilor)
Fie P ∶ V → V un operator de proiectie. Fie
FixP = {v ∈ V ∣F (v) = v}
subspatiilor punctelor fixe. Atunci:
a) FixP este un subspatiuın V si FixP = ImP;
b) V = FixP ⊕KerP;
c) Daca V1,V2 sunt subspatii complementare, V = V1 ⊕V2,exista si este unic un operator de proiectie
P ∶ V → V pentrucare ImP = V1 si KerP = V2. (Acest operator s. n.proiectia pe V1, paralela cu V2);
Operatorii de proiectie si simetrie:
Proiectie:
Un endomorfism P ∶ V → V s. n. operator de proiectie dacaP ○ P = P (adica P2 = P ⇐⇒ P este idempotent);
Prop. 11.6 (caracterizarea proiectiilor)
Fie P ∶ V → V un operator de proiectie. Fie
FixP = {v ∈ V ∣F (v) = v}
subspatiilor punctelor fixe. Atunci:
a) FixP este un subspatiuın V si FixP = ImP;
b) V = FixP ⊕KerP;
c) Daca V1,V2 sunt subspatii complementare, V = V1 ⊕V2,exista si este unic un operator de proiectie P ∶ V → V pentrucare
ImP = V1 si KerP = V2. (Acest operator s. n.proiectia pe V1, paralela cu V2);
Operatorii de proiectie si simetrie:
Proiectie:
Un endomorfism P ∶ V → V s. n. operator de proiectie dacaP ○ P = P (adica P2 = P ⇐⇒ P este idempotent);
Prop. 11.6 (caracterizarea proiectiilor)
Fie P ∶ V → V un operator de proiectie. Fie
FixP = {v ∈ V ∣F (v) = v}
subspatiilor punctelor fixe. Atunci:
a) FixP este un subspatiuın V si FixP = ImP;
b) V = FixP ⊕KerP;
c) Daca V1,V2 sunt subspatii complementare, V = V1 ⊕V2,exista si este unic un operator de proiectie P ∶ V → V pentrucare ImP = V1 si KerP = V2.
(Acest operator s. n.proiectia pe V1, paralela cu V2);
Operatorii de proiectie si simetrie:
Proiectie:
Un endomorfism P ∶ V → V s. n. operator de proiectie dacaP ○ P = P (adica P2 = P ⇐⇒ P este idempotent);
Prop. 11.6 (caracterizarea proiectiilor)
Fie P ∶ V → V un operator de proiectie. Fie
FixP = {v ∈ V ∣F (v) = v}
subspatiilor punctelor fixe. Atunci:
a) FixP este un subspatiuın V si FixP = ImP;
b) V = FixP ⊕KerP;
c) Daca V1,V2 sunt subspatii complementare, V = V1 ⊕V2,exista si este unic un operator de proiectie P ∶ V → V pentrucare ImP = V1 si KerP = V2. (Acest operator s. n.
proiectia pe V1, paralela cu V2);
Operatorii de proiectie si simetrie:
Proiectie:
Un endomorfism P ∶ V → V s. n. operator de proiectie dacaP ○ P = P (adica P2 = P ⇐⇒ P este idempotent);
Prop. 11.6 (caracterizarea proiectiilor)
Fie P ∶ V → V un operator de proiectie. Fie
FixP = {v ∈ V ∣F (v) = v}
subspatiilor punctelor fixe. Atunci:
a) FixP este un subspatiuın V si FixP = ImP;
b) V = FixP ⊕KerP;
c) Daca V1,V2 sunt subspatii complementare, V = V1 ⊕V2,exista si este unic un operator de proiectie P ∶ V → V pentrucare ImP = V1 si KerP = V2. (Acest operator s. n.proiectia pe V1,
paralela cu V2);
Operatorii de proiectie si simetrie:
Proiectie:
Un endomorfism P ∶ V → V s. n. operator de proiectie dacaP ○ P = P (adica P2 = P ⇐⇒ P este idempotent);
Prop. 11.6 (caracterizarea proiectiilor)
Fie P ∶ V → V un operator de proiectie. Fie
FixP = {v ∈ V ∣F (v) = v}
subspatiilor punctelor fixe. Atunci:
a) FixP este un subspatiuın V si FixP = ImP;
b) V = FixP ⊕KerP;
c) Daca V1,V2 sunt subspatii complementare, V = V1 ⊕V2,exista si este unic un operator de proiectie P ∶ V → V pentrucare ImP = V1 si KerP = V2. (Acest operator s. n.proiectia pe V1, paralela cu V2);
Operatorii de proiectie si simetrie:
Proiectie:
Un endomorfism P ∶ V → V s. n. operator de proiectie dacaP ○ P = P (adica P2 = P ⇐⇒ P este idempotent);
Prop. 11.6 (caracterizarea proiectiilor)
Fie P ∶ V → V un operator de proiectie. Fie
FixP = {v ∈ V ∣F (v) = v}
subspatiilor punctelor fixe. Atunci:
a) FixP este un subspatiuın V si FixP = ImP;
b) V = FixP ⊕KerP;
c) Daca V1,V2 sunt subspatii complementare, V = V1 ⊕V2,exista si este unic un operator de proiectie P ∶ V → V pentrucare ImP = V1 si KerP = V2. (Acest operator s. n.proiectia pe V1, paralela cu V2);
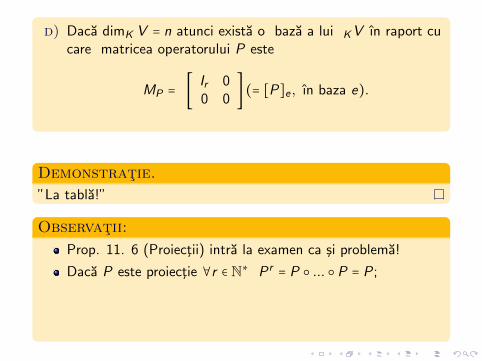
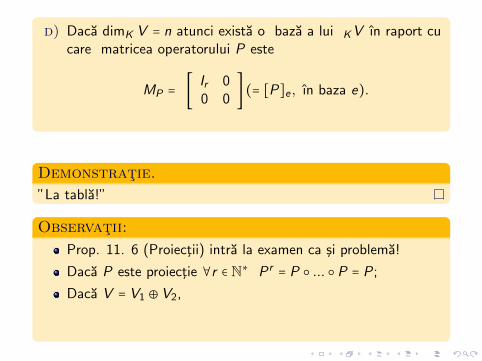
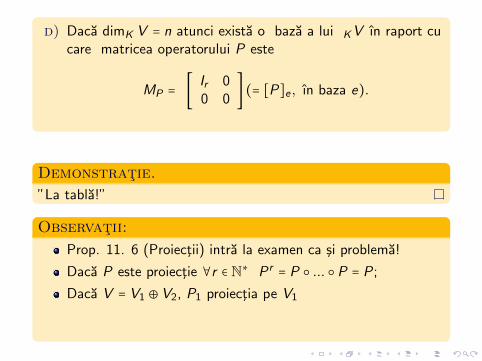
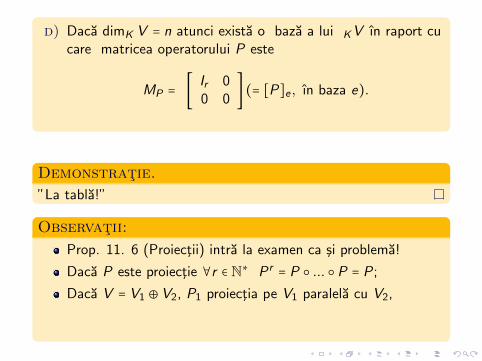
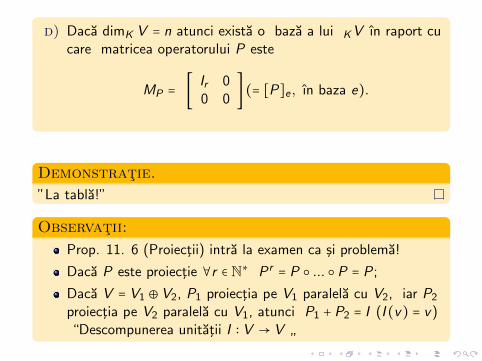
d) Daca dimK V = n
atunci exista o baza a lui KV ın raport cucare matricea operatorului P este
MP = [ Ir 00 0
] (= [P]e , ın baza e).
Demonstratie.
”La tabla!”
Observatii:
Prop. 11. 6 (Proiectii) intra la examen ca si problema!
Daca P este proiectie ∀r ∈ N∗ P r = P ○ ... ○ P = P;
Daca V = V1 ⊕V2, P1 proiectia pe V1 paralela cu V2, iar P2
proiectia pe V2 paralela cu V1, atunci P1 + P2 = I (I (v) = v)“Descompunerea unitatii I ∶ V → V
”
d) Daca dimK V = n atunci exista o
baza a lui KV ın raport cucare matricea operatorului P este
MP = [ Ir 00 0
] (= [P]e , ın baza e).
Demonstratie.
”La tabla!”
Observatii:
Prop. 11. 6 (Proiectii) intra la examen ca si problema!
Daca P este proiectie ∀r ∈ N∗ P r = P ○ ... ○ P = P;
Daca V = V1 ⊕V2, P1 proiectia pe V1 paralela cu V2, iar P2
proiectia pe V2 paralela cu V1, atunci P1 + P2 = I (I (v) = v)“Descompunerea unitatii I ∶ V → V
”
d) Daca dimK V = n atunci exista o baza a lui
KV ın raport cucare matricea operatorului P este
MP = [ Ir 00 0
] (= [P]e , ın baza e).
Demonstratie.
”La tabla!”
Observatii:
Prop. 11. 6 (Proiectii) intra la examen ca si problema!
Daca P este proiectie ∀r ∈ N∗ P r = P ○ ... ○ P = P;
Daca V = V1 ⊕V2, P1 proiectia pe V1 paralela cu V2, iar P2
proiectia pe V2 paralela cu V1, atunci P1 + P2 = I (I (v) = v)“Descompunerea unitatii I ∶ V → V
”
d) Daca dimK V = n atunci exista o baza a lui KV ın raport cucare
matricea operatorului P este
MP = [ Ir 00 0
] (= [P]e , ın baza e).
Demonstratie.
”La tabla!”
Observatii:
Prop. 11. 6 (Proiectii) intra la examen ca si problema!
Daca P este proiectie ∀r ∈ N∗ P r = P ○ ... ○ P = P;
Daca V = V1 ⊕V2, P1 proiectia pe V1 paralela cu V2, iar P2
proiectia pe V2 paralela cu V1, atunci P1 + P2 = I (I (v) = v)“Descompunerea unitatii I ∶ V → V
”
d) Daca dimK V = n atunci exista o baza a lui KV ın raport cucare matricea operatorului P este
MP = [ Ir 00 0
] (= [P]e , ın baza e).
Demonstratie.
”La tabla!”
Observatii:
Prop. 11. 6 (Proiectii) intra la examen ca si problema!
Daca P este proiectie ∀r ∈ N∗ P r = P ○ ... ○ P = P;
Daca V = V1 ⊕V2, P1 proiectia pe V1 paralela cu V2, iar P2
proiectia pe V2 paralela cu V1, atunci P1 + P2 = I (I (v) = v)“Descompunerea unitatii I ∶ V → V
”
d) Daca dimK V = n atunci exista o baza a lui KV ın raport cucare matricea operatorului P este
MP =
[ Ir 00 0
] (= [P]e , ın baza e).
Demonstratie.
”La tabla!”
Observatii:
Prop. 11. 6 (Proiectii) intra la examen ca si problema!
Daca P este proiectie ∀r ∈ N∗ P r = P ○ ... ○ P = P;
Daca V = V1 ⊕V2, P1 proiectia pe V1 paralela cu V2, iar P2
proiectia pe V2 paralela cu V1, atunci P1 + P2 = I (I (v) = v)“Descompunerea unitatii I ∶ V → V
”
d) Daca dimK V = n atunci exista o baza a lui KV ın raport cucare matricea operatorului P este
MP = [ Ir 0
0 0] (= [P]e , ın baza e).
Demonstratie.
”La tabla!”
Observatii:
Prop. 11. 6 (Proiectii) intra la examen ca si problema!
Daca P este proiectie ∀r ∈ N∗ P r = P ○ ... ○ P = P;
Daca V = V1 ⊕V2, P1 proiectia pe V1 paralela cu V2, iar P2
proiectia pe V2 paralela cu V1, atunci P1 + P2 = I (I (v) = v)“Descompunerea unitatii I ∶ V → V
”
d) Daca dimK V = n atunci exista o baza a lui KV ın raport cucare matricea operatorului P este
MP = [ Ir 00 0
] (= [P]e , ın baza e).
Demonstratie.
”La tabla!”
Observatii:
Prop. 11. 6 (Proiectii) intra la examen ca si problema!
Daca P este proiectie ∀r ∈ N∗ P r = P ○ ... ○ P = P;
Daca V = V1 ⊕V2, P1 proiectia pe V1 paralela cu V2, iar P2
proiectia pe V2 paralela cu V1, atunci P1 + P2 = I (I (v) = v)“Descompunerea unitatii I ∶ V → V
”
d) Daca dimK V = n atunci exista o baza a lui KV ın raport cucare matricea operatorului P este
MP = [ Ir 00 0
] (= [P]e , ın baza e).
Demonstratie.
”La tabla!”
Observatii:
Prop. 11. 6 (Proiectii) intra la examen ca si problema!
Daca P este proiectie ∀r ∈ N∗ P r = P ○ ... ○ P = P;
Daca V = V1 ⊕V2, P1 proiectia pe V1 paralela cu V2, iar P2
proiectia pe V2 paralela cu V1, atunci P1 + P2 = I (I (v) = v)“Descompunerea unitatii I ∶ V → V
”
d) Daca dimK V = n atunci exista o baza a lui KV ın raport cucare matricea operatorului P este
MP = [ Ir 00 0
] (= [P]e , ın baza e).
Demonstratie.
”La tabla!”
Observatii:
Prop. 11. 6 (Proiectii) intra la examen ca si problema!
Daca P este proiectie ∀r ∈ N∗ P r = P ○ ... ○ P = P;
Daca V = V1 ⊕V2, P1 proiectia pe V1 paralela cu V2, iar P2
proiectia pe V2 paralela cu V1, atunci P1 + P2 = I (I (v) = v)“Descompunerea unitatii I ∶ V → V
”
d) Daca dimK V = n atunci exista o baza a lui KV ın raport cucare matricea operatorului P este
MP = [ Ir 00 0
] (= [P]e , ın baza e).
Demonstratie.
”La tabla!”
Observatii:
Prop. 11. 6 (Proiectii)
intra la examen ca si problema!
Daca P este proiectie ∀r ∈ N∗ P r = P ○ ... ○ P = P;
Daca V = V1 ⊕V2, P1 proiectia pe V1 paralela cu V2, iar P2
proiectia pe V2 paralela cu V1, atunci P1 + P2 = I (I (v) = v)“Descompunerea unitatii I ∶ V → V
”
d) Daca dimK V = n atunci exista o baza a lui KV ın raport cucare matricea operatorului P este
MP = [ Ir 00 0
] (= [P]e , ın baza e).
Demonstratie.
”La tabla!”
Observatii:
Prop. 11. 6 (Proiectii) intra la examen ca si problema!
Daca P este proiectie ∀r ∈ N∗ P r = P ○ ... ○ P = P;
Daca V = V1 ⊕V2, P1 proiectia pe V1 paralela cu V2, iar P2
proiectia pe V2 paralela cu V1, atunci P1 + P2 = I (I (v) = v)“Descompunerea unitatii I ∶ V → V
”
d) Daca dimK V = n atunci exista o baza a lui KV ın raport cucare matricea operatorului P este
MP = [ Ir 00 0
] (= [P]e , ın baza e).
Demonstratie.
”La tabla!”
Observatii:
Prop. 11. 6 (Proiectii) intra la examen ca si problema!
Daca P
este proiectie ∀r ∈ N∗ P r = P ○ ... ○ P = P;
Daca V = V1 ⊕V2, P1 proiectia pe V1 paralela cu V2, iar P2
proiectia pe V2 paralela cu V1, atunci P1 + P2 = I (I (v) = v)“Descompunerea unitatii I ∶ V → V
”
d) Daca dimK V = n atunci exista o baza a lui KV ın raport cucare matricea operatorului P este
MP = [ Ir 00 0
] (= [P]e , ın baza e).
Demonstratie.
”La tabla!”
Observatii:
Prop. 11. 6 (Proiectii) intra la examen ca si problema!
Daca P este proiectie ∀r ∈ N∗
P r = P ○ ... ○ P = P;
Daca V = V1 ⊕V2, P1 proiectia pe V1 paralela cu V2, iar P2
proiectia pe V2 paralela cu V1, atunci P1 + P2 = I (I (v) = v)“Descompunerea unitatii I ∶ V → V
”
d) Daca dimK V = n atunci exista o baza a lui KV ın raport cucare matricea operatorului P este
MP = [ Ir 00 0
] (= [P]e , ın baza e).
Demonstratie.
”La tabla!”
Observatii:
Prop. 11. 6 (Proiectii) intra la examen ca si problema!
Daca P este proiectie ∀r ∈ N∗ P r = P ○ ... ○ P =
P;
Daca V = V1 ⊕V2, P1 proiectia pe V1 paralela cu V2, iar P2
proiectia pe V2 paralela cu V1, atunci P1 + P2 = I (I (v) = v)“Descompunerea unitatii I ∶ V → V
”
d) Daca dimK V = n atunci exista o baza a lui KV ın raport cucare matricea operatorului P este
MP = [ Ir 00 0
] (= [P]e , ın baza e).
Demonstratie.
”La tabla!”
Observatii:
Prop. 11. 6 (Proiectii) intra la examen ca si problema!
Daca P este proiectie ∀r ∈ N∗ P r = P ○ ... ○ P = P;
Daca V = V1 ⊕V2, P1 proiectia pe V1 paralela cu V2, iar P2
proiectia pe V2 paralela cu V1, atunci P1 + P2 = I (I (v) = v)“Descompunerea unitatii I ∶ V → V
”
d) Daca dimK V = n atunci exista o baza a lui KV ın raport cucare matricea operatorului P este
MP = [ Ir 00 0
] (= [P]e , ın baza e).
Demonstratie.
”La tabla!”
Observatii:
Prop. 11. 6 (Proiectii) intra la examen ca si problema!
Daca P este proiectie ∀r ∈ N∗ P r = P ○ ... ○ P = P;
Daca V = V1 ⊕V2,
P1 proiectia pe V1 paralela cu V2, iar P2
proiectia pe V2 paralela cu V1, atunci P1 + P2 = I (I (v) = v)“Descompunerea unitatii I ∶ V → V
”
d) Daca dimK V = n atunci exista o baza a lui KV ın raport cucare matricea operatorului P este
MP = [ Ir 00 0
] (= [P]e , ın baza e).
Demonstratie.
”La tabla!”
Observatii:
Prop. 11. 6 (Proiectii) intra la examen ca si problema!
Daca P este proiectie ∀r ∈ N∗ P r = P ○ ... ○ P = P;
Daca V = V1 ⊕V2, P1 proiectia pe V1
paralela cu V2, iar P2
proiectia pe V2 paralela cu V1, atunci P1 + P2 = I (I (v) = v)“Descompunerea unitatii I ∶ V → V
”
d) Daca dimK V = n atunci exista o baza a lui KV ın raport cucare matricea operatorului P este
MP = [ Ir 00 0
] (= [P]e , ın baza e).
Demonstratie.
”La tabla!”
Observatii:
Prop. 11. 6 (Proiectii) intra la examen ca si problema!
Daca P este proiectie ∀r ∈ N∗ P r = P ○ ... ○ P = P;
Daca V = V1 ⊕V2, P1 proiectia pe V1 paralela cu V2,
iar P2
proiectia pe V2 paralela cu V1, atunci P1 + P2 = I (I (v) = v)“Descompunerea unitatii I ∶ V → V
”
d) Daca dimK V = n atunci exista o baza a lui KV ın raport cucare matricea operatorului P este
MP = [ Ir 00 0
] (= [P]e , ın baza e).
Demonstratie.
”La tabla!”
Observatii:
Prop. 11. 6 (Proiectii) intra la examen ca si problema!
Daca P este proiectie ∀r ∈ N∗ P r = P ○ ... ○ P = P;
Daca V = V1 ⊕V2, P1 proiectia pe V1 paralela cu V2, iar P2
proiectia pe V2
paralela cu V1, atunci P1 + P2 = I (I (v) = v)“Descompunerea unitatii I ∶ V → V
”
d) Daca dimK V = n atunci exista o baza a lui KV ın raport cucare matricea operatorului P este
MP = [ Ir 00 0
] (= [P]e , ın baza e).
Demonstratie.
”La tabla!”
Observatii:
Prop. 11. 6 (Proiectii) intra la examen ca si problema!
Daca P este proiectie ∀r ∈ N∗ P r = P ○ ... ○ P = P;
Daca V = V1 ⊕V2, P1 proiectia pe V1 paralela cu V2, iar P2
proiectia pe V2 paralela cu V1, atunci
P1 + P2 = I (I (v) = v)“Descompunerea unitatii I ∶ V → V
”
d) Daca dimK V = n atunci exista o baza a lui KV ın raport cucare matricea operatorului P este
MP = [ Ir 00 0
] (= [P]e , ın baza e).
Demonstratie.
”La tabla!”
Observatii:
Prop. 11. 6 (Proiectii) intra la examen ca si problema!
Daca P este proiectie ∀r ∈ N∗ P r = P ○ ... ○ P = P;
Daca V = V1 ⊕V2, P1 proiectia pe V1 paralela cu V2, iar P2
proiectia pe V2 paralela cu V1, atunci P1 + P2 = I
(I (v) = v)“Descompunerea unitatii I ∶ V → V
”
d) Daca dimK V = n atunci exista o baza a lui KV ın raport cucare matricea operatorului P este
MP = [ Ir 00 0
] (= [P]e , ın baza e).
Demonstratie.
”La tabla!”
Observatii:
Prop. 11. 6 (Proiectii) intra la examen ca si problema!
Daca P este proiectie ∀r ∈ N∗ P r = P ○ ... ○ P = P;
Daca V = V1 ⊕V2, P1 proiectia pe V1 paralela cu V2, iar P2
proiectia pe V2 paralela cu V1, atunci P1 + P2 = I (I (v) = v)
“Descompunerea unitatii I ∶ V → V”
d) Daca dimK V = n atunci exista o baza a lui KV ın raport cucare matricea operatorului P este
MP = [ Ir 00 0
] (= [P]e , ın baza e).
Demonstratie.
”La tabla!”
Observatii:
Prop. 11. 6 (Proiectii) intra la examen ca si problema!
Daca P este proiectie ∀r ∈ N∗ P r = P ○ ... ○ P = P;
Daca V = V1 ⊕V2, P1 proiectia pe V1 paralela cu V2, iar P2
proiectia pe V2 paralela cu V1, atunci P1 + P2 = I (I (v) = v)“Descompunerea unitatii I ∶ V → V
”
Simetrie:
Un operator S ∶ V → V s. n. simetrie ın KV daca S ○ S = I .
Prop 11.7 (caracterizarea simetriilor)
Fie InvS = {v ∈ V ∣S(v) = −v}, iar K = R sau K = C). Aratati ca:
1 K InvS ≤ KV ;
2 V = FixS ⊕ InvS ;
3 Pentru orice scindare, V = V1 ⊕V2, exista o unica simetrieS ∶ V → V astfel ıncat V1 = FixS si V2 = InvS (S se numestesimetria fata de V1 paralela cu V2);
4 Daca dimK V = n atunci exista o baza ın V fata de carematricea operatorului S ın aceasta baza este:
MS = [ Ir 00 −In−r
] .
Demonstratie.
”Vezi Problema 2, Seminar 11!”
Simetrie:
Un operator S ∶ V → V
s. n. simetrie ın KV daca S ○ S = I .
Prop 11.7 (caracterizarea simetriilor)
Fie InvS = {v ∈ V ∣S(v) = −v}, iar K = R sau K = C). Aratati ca:
1 K InvS ≤ KV ;
2 V = FixS ⊕ InvS ;
3 Pentru orice scindare, V = V1 ⊕V2, exista o unica simetrieS ∶ V → V astfel ıncat V1 = FixS si V2 = InvS (S se numestesimetria fata de V1 paralela cu V2);
4 Daca dimK V = n atunci exista o baza ın V fata de carematricea operatorului S ın aceasta baza este:
MS = [ Ir 00 −In−r
] .
Demonstratie.
”Vezi Problema 2, Seminar 11!”
Simetrie:
Un operator S ∶ V → V s. n. simetrie ın KV
daca S ○ S = I .
Prop 11.7 (caracterizarea simetriilor)
Fie InvS = {v ∈ V ∣S(v) = −v}, iar K = R sau K = C). Aratati ca:
1 K InvS ≤ KV ;
2 V = FixS ⊕ InvS ;
3 Pentru orice scindare, V = V1 ⊕V2, exista o unica simetrieS ∶ V → V astfel ıncat V1 = FixS si V2 = InvS (S se numestesimetria fata de V1 paralela cu V2);
4 Daca dimK V = n atunci exista o baza ın V fata de carematricea operatorului S ın aceasta baza este:
MS = [ Ir 00 −In−r
] .
Demonstratie.
”Vezi Problema 2, Seminar 11!”
Simetrie:
Un operator S ∶ V → V s. n. simetrie ın KV daca S ○ S = I .
Prop 11.7 (caracterizarea simetriilor)
Fie InvS = {v ∈ V ∣S(v) = −v}, iar K = R sau K = C). Aratati ca:
1 K InvS ≤ KV ;
2 V = FixS ⊕ InvS ;
3 Pentru orice scindare, V = V1 ⊕V2, exista o unica simetrieS ∶ V → V astfel ıncat V1 = FixS si V2 = InvS (S se numestesimetria fata de V1 paralela cu V2);
4 Daca dimK V = n atunci exista o baza ın V fata de carematricea operatorului S ın aceasta baza este:
MS = [ Ir 00 −In−r
] .
Demonstratie.
”Vezi Problema 2, Seminar 11!”
Simetrie:
Un operator S ∶ V → V s. n. simetrie ın KV daca S ○ S = I .
Prop 11.7 (caracterizarea simetriilor)
Fie InvS = {v ∈ V ∣S(v) = −v}, iar K = R sau K = C). Aratati ca:
1 K InvS ≤ KV ;
2 V = FixS ⊕ InvS ;
3 Pentru orice scindare, V = V1 ⊕V2, exista o unica simetrieS ∶ V → V astfel ıncat V1 = FixS si V2 = InvS (S se numestesimetria fata de V1 paralela cu V2);
4 Daca dimK V = n atunci exista o baza ın V fata de carematricea operatorului S ın aceasta baza este:
MS = [ Ir 00 −In−r
] .
Demonstratie.
”Vezi Problema 2, Seminar 11!”
Simetrie:
Un operator S ∶ V → V s. n. simetrie ın KV daca S ○ S = I .
Prop 11.7 (caracterizarea simetriilor)
Fie InvS = {v ∈ V ∣S(v) = −v},
iar K = R sau K = C). Aratati ca:
1 K InvS ≤ KV ;
2 V = FixS ⊕ InvS ;
3 Pentru orice scindare, V = V1 ⊕V2, exista o unica simetrieS ∶ V → V astfel ıncat V1 = FixS si V2 = InvS (S se numestesimetria fata de V1 paralela cu V2);
4 Daca dimK V = n atunci exista o baza ın V fata de carematricea operatorului S ın aceasta baza este:
MS = [ Ir 00 −In−r
] .
Demonstratie.
”Vezi Problema 2, Seminar 11!”
Simetrie:
Un operator S ∶ V → V s. n. simetrie ın KV daca S ○ S = I .
Prop 11.7 (caracterizarea simetriilor)
Fie InvS = {v ∈ V ∣S(v) = −v}, iar K = R sau K = C).
Aratati ca:
1 K InvS ≤ KV ;
2 V = FixS ⊕ InvS ;
3 Pentru orice scindare, V = V1 ⊕V2, exista o unica simetrieS ∶ V → V astfel ıncat V1 = FixS si V2 = InvS (S se numestesimetria fata de V1 paralela cu V2);
4 Daca dimK V = n atunci exista o baza ın V fata de carematricea operatorului S ın aceasta baza este:
MS = [ Ir 00 −In−r
] .
Demonstratie.
”Vezi Problema 2, Seminar 11!”
Simetrie:
Un operator S ∶ V → V s. n. simetrie ın KV daca S ○ S = I .
Prop 11.7 (caracterizarea simetriilor)
Fie InvS = {v ∈ V ∣S(v) = −v}, iar K = R sau K = C). Aratati ca:
1 K InvS ≤ KV ;
2 V = FixS ⊕ InvS ;
3 Pentru orice scindare, V = V1 ⊕V2, exista o unica simetrieS ∶ V → V astfel ıncat V1 = FixS si V2 = InvS (S se numestesimetria fata de V1 paralela cu V2);
4 Daca dimK V = n atunci exista o baza ın V fata de carematricea operatorului S ın aceasta baza este:
MS = [ Ir 00 −In−r
] .
Demonstratie.
”Vezi Problema 2, Seminar 11!”
Simetrie:
Un operator S ∶ V → V s. n. simetrie ın KV daca S ○ S = I .
Prop 11.7 (caracterizarea simetriilor)
Fie InvS = {v ∈ V ∣S(v) = −v}, iar K = R sau K = C). Aratati ca:
1 K InvS ≤ KV ;
2 V = FixS ⊕ InvS ;
3 Pentru orice scindare, V = V1 ⊕V2, exista o unica simetrieS ∶ V → V astfel ıncat V1 = FixS si V2 = InvS (S se numestesimetria fata de V1 paralela cu V2);
4 Daca dimK V = n atunci exista o baza ın V fata de carematricea operatorului S ın aceasta baza este:
MS = [ Ir 00 −In−r
] .
Demonstratie.
”Vezi Problema 2, Seminar 11!”
Simetrie:
Un operator S ∶ V → V s. n. simetrie ın KV daca S ○ S = I .
Prop 11.7 (caracterizarea simetriilor)
Fie InvS = {v ∈ V ∣S(v) = −v}, iar K = R sau K = C). Aratati ca:
1 K InvS ≤ KV ;
2 V = FixS ⊕ InvS ;
3 Pentru orice scindare, V = V1 ⊕V2, exista o unica simetrieS ∶ V → V astfel ıncat V1 = FixS si V2 = InvS (S se numestesimetria fata de V1 paralela cu V2);
4 Daca dimK V = n atunci exista o baza ın V fata de carematricea operatorului S ın aceasta baza este:
MS = [ Ir 00 −In−r
] .
Demonstratie.
”Vezi Problema 2, Seminar 11!”
Simetrie:
Un operator S ∶ V → V s. n. simetrie ın KV daca S ○ S = I .
Prop 11.7 (caracterizarea simetriilor)
Fie InvS = {v ∈ V ∣S(v) = −v}, iar K = R sau K = C). Aratati ca:
1 K InvS ≤ KV ;
2 V = FixS ⊕ InvS ;
3 Pentru orice scindare,
V = V1 ⊕V2, exista o unica simetrieS ∶ V → V astfel ıncat V1 = FixS si V2 = InvS (S se numestesimetria fata de V1 paralela cu V2);
4 Daca dimK V = n atunci exista o baza ın V fata de carematricea operatorului S ın aceasta baza este:
MS = [ Ir 00 −In−r
] .
Demonstratie.
”Vezi Problema 2, Seminar 11!”
Simetrie:
Un operator S ∶ V → V s. n. simetrie ın KV daca S ○ S = I .
Prop 11.7 (caracterizarea simetriilor)
Fie InvS = {v ∈ V ∣S(v) = −v}, iar K = R sau K = C). Aratati ca:
1 K InvS ≤ KV ;
2 V = FixS ⊕ InvS ;
3 Pentru orice scindare, V = V1 ⊕V2,
exista o unica simetrieS ∶ V → V astfel ıncat V1 = FixS si V2 = InvS (S se numestesimetria fata de V1 paralela cu V2);
4 Daca dimK V = n atunci exista o baza ın V fata de carematricea operatorului S ın aceasta baza este:
MS = [ Ir 00 −In−r
] .
Demonstratie.
”Vezi Problema 2, Seminar 11!”
Simetrie:
Un operator S ∶ V → V s. n. simetrie ın KV daca S ○ S = I .
Prop 11.7 (caracterizarea simetriilor)
Fie InvS = {v ∈ V ∣S(v) = −v}, iar K = R sau K = C). Aratati ca:
1 K InvS ≤ KV ;
2 V = FixS ⊕ InvS ;
3 Pentru orice scindare, V = V1 ⊕V2, exista o unica simetrie
S ∶ V → V astfel ıncat V1 = FixS si V2 = InvS (S se numestesimetria fata de V1 paralela cu V2);
4 Daca dimK V = n atunci exista o baza ın V fata de carematricea operatorului S ın aceasta baza este:
MS = [ Ir 00 −In−r
] .
Demonstratie.
”Vezi Problema 2, Seminar 11!”
Simetrie:
Un operator S ∶ V → V s. n. simetrie ın KV daca S ○ S = I .
Prop 11.7 (caracterizarea simetriilor)
Fie InvS = {v ∈ V ∣S(v) = −v}, iar K = R sau K = C). Aratati ca:
1 K InvS ≤ KV ;
2 V = FixS ⊕ InvS ;
3 Pentru orice scindare, V = V1 ⊕V2, exista o unica simetrieS ∶ V → V
astfel ıncat V1 = FixS si V2 = InvS (S se numestesimetria fata de V1 paralela cu V2);
4 Daca dimK V = n atunci exista o baza ın V fata de carematricea operatorului S ın aceasta baza este:
MS = [ Ir 00 −In−r
] .
Demonstratie.
”Vezi Problema 2, Seminar 11!”
Simetrie:
Un operator S ∶ V → V s. n. simetrie ın KV daca S ○ S = I .
Prop 11.7 (caracterizarea simetriilor)
Fie InvS = {v ∈ V ∣S(v) = −v}, iar K = R sau K = C). Aratati ca:
1 K InvS ≤ KV ;
2 V = FixS ⊕ InvS ;
3 Pentru orice scindare, V = V1 ⊕V2, exista o unica simetrieS ∶ V → V astfel ıncat
V1 = FixS si V2 = InvS (S se numestesimetria fata de V1 paralela cu V2);
4 Daca dimK V = n atunci exista o baza ın V fata de carematricea operatorului S ın aceasta baza este:
MS = [ Ir 00 −In−r
] .
Demonstratie.
”Vezi Problema 2, Seminar 11!”
Simetrie:
Un operator S ∶ V → V s. n. simetrie ın KV daca S ○ S = I .
Prop 11.7 (caracterizarea simetriilor)
Fie InvS = {v ∈ V ∣S(v) = −v}, iar K = R sau K = C). Aratati ca:
1 K InvS ≤ KV ;
2 V = FixS ⊕ InvS ;
3 Pentru orice scindare, V = V1 ⊕V2, exista o unica simetrieS ∶ V → V astfel ıncat V1 = FixS si V2 = InvS (S se numestesimetria fata de V1 paralela cu V2);
4 Daca dimK V = n atunci exista o baza ın V fata de carematricea operatorului S ın aceasta baza este:
MS = [ Ir 00 −In−r
] .
Demonstratie.
”Vezi Problema 2, Seminar 11!”
Simetrie:
Un operator S ∶ V → V s. n. simetrie ın KV daca S ○ S = I .
Prop 11.7 (caracterizarea simetriilor)
Fie InvS = {v ∈ V ∣S(v) = −v}, iar K = R sau K = C). Aratati ca:
1 K InvS ≤ KV ;
2 V = FixS ⊕ InvS ;
3 Pentru orice scindare, V = V1 ⊕V2, exista o unica simetrieS ∶ V → V astfel ıncat V1 = FixS si V2 = InvS (S se numestesimetria fata de V1 paralela cu V2);
4 Daca dimK V = n atunci exista o baza
ın V fata de carematricea operatorului S ın aceasta baza este:
MS = [ Ir 00 −In−r
] .
Demonstratie.
”Vezi Problema 2, Seminar 11!”
Simetrie:
Un operator S ∶ V → V s. n. simetrie ın KV daca S ○ S = I .
Prop 11.7 (caracterizarea simetriilor)
Fie InvS = {v ∈ V ∣S(v) = −v}, iar K = R sau K = C). Aratati ca:
1 K InvS ≤ KV ;
2 V = FixS ⊕ InvS ;
3 Pentru orice scindare, V = V1 ⊕V2, exista o unica simetrieS ∶ V → V astfel ıncat V1 = FixS si V2 = InvS (S se numestesimetria fata de V1 paralela cu V2);
4 Daca dimK V = n atunci exista o baza ın V fata de carematricea operatorului
S ın aceasta baza este:
MS = [ Ir 00 −In−r
] .
Demonstratie.
”Vezi Problema 2, Seminar 11!”
Simetrie:
Un operator S ∶ V → V s. n. simetrie ın KV daca S ○ S = I .
Prop 11.7 (caracterizarea simetriilor)
Fie InvS = {v ∈ V ∣S(v) = −v}, iar K = R sau K = C). Aratati ca:
1 K InvS ≤ KV ;
2 V = FixS ⊕ InvS ;
3 Pentru orice scindare, V = V1 ⊕V2, exista o unica simetrieS ∶ V → V astfel ıncat V1 = FixS si V2 = InvS (S se numestesimetria fata de V1 paralela cu V2);
4 Daca dimK V = n atunci exista o baza ın V fata de carematricea operatorului S ın aceasta baza este:
MS = [ Ir 00 −In−r
] .
Demonstratie.
”Vezi Problema 2, Seminar 11!”
Simetrie:
Un operator S ∶ V → V s. n. simetrie ın KV daca S ○ S = I .
Prop 11.7 (caracterizarea simetriilor)
Fie InvS = {v ∈ V ∣S(v) = −v}, iar K = R sau K = C). Aratati ca:
1 K InvS ≤ KV ;
2 V = FixS ⊕ InvS ;
3 Pentru orice scindare, V = V1 ⊕V2, exista o unica simetrieS ∶ V → V astfel ıncat V1 = FixS si V2 = InvS (S se numestesimetria fata de V1 paralela cu V2);
4 Daca dimK V = n atunci exista o baza ın V fata de carematricea operatorului S ın aceasta baza este:
MS = [ Ir 0
0 −In−r] .
Demonstratie.
”Vezi Problema 2, Seminar 11!”
Simetrie:
Un operator S ∶ V → V s. n. simetrie ın KV daca S ○ S = I .
Prop 11.7 (caracterizarea simetriilor)
Fie InvS = {v ∈ V ∣S(v) = −v}, iar K = R sau K = C). Aratati ca:
1 K InvS ≤ KV ;
2 V = FixS ⊕ InvS ;
3 Pentru orice scindare, V = V1 ⊕V2, exista o unica simetrieS ∶ V → V astfel ıncat V1 = FixS si V2 = InvS (S se numestesimetria fata de V1 paralela cu V2);
4 Daca dimK V = n atunci exista o baza ın V fata de carematricea operatorului S ın aceasta baza este:
MS = [ Ir 00 −In−r
] .
Demonstratie.
”Vezi Problema 2, Seminar 11!”
Simetrie:
Un operator S ∶ V → V s. n. simetrie ın KV daca S ○ S = I .
Prop 11.7 (caracterizarea simetriilor)
Fie InvS = {v ∈ V ∣S(v) = −v}, iar K = R sau K = C). Aratati ca:
1 K InvS ≤ KV ;
2 V = FixS ⊕ InvS ;
3 Pentru orice scindare, V = V1 ⊕V2, exista o unica simetrieS ∶ V → V astfel ıncat V1 = FixS si V2 = InvS (S se numestesimetria fata de V1 paralela cu V2);
4 Daca dimK V = n atunci exista o baza ın V fata de carematricea operatorului S ın aceasta baza este:
MS = [ Ir 00 −In−r
] .
Demonstratie.
”Vezi Problema 2, Seminar 11!”

Legatura ıntre proiectii si simetrii
Intuitiv avem imaginea ....... deci
P(v) = 1
2(v + S(v)) sau S(v) = 2P(v) − v , ∀v ∈ V .
Se arata usor ca, daca P ∶ V → V este o proiectie, atunciS ∶ V → V este o simetrie; reciproc, daca S ∶ V → V este osimetrie atunci
P ∶ V → V ,P = 1
2(I + S)
este o proiectie.Daca P si S sunt legate prin
S = 2P − I (⇐⇒ P = 1
2(S + I ))
atunci, ele dau aceeasi scindare:
V = V1 ⊕V2, V1 = FixS = FixP, V2 = ImS = KerP.

Legatura ıntre proiectii si simetriiIntuitiv avem imaginea .......
deci
P(v) = 1
2(v + S(v)) sau S(v) = 2P(v) − v , ∀v ∈ V .
Se arata usor ca, daca P ∶ V → V este o proiectie, atunciS ∶ V → V este o simetrie; reciproc, daca S ∶ V → V este osimetrie atunci
P ∶ V → V ,P = 1
2(I + S)
este o proiectie.Daca P si S sunt legate prin
S = 2P − I (⇐⇒ P = 1
2(S + I ))
atunci, ele dau aceeasi scindare:
V = V1 ⊕V2, V1 = FixS = FixP, V2 = ImS = KerP.

Legatura ıntre proiectii si simetriiIntuitiv avem imaginea ....... deci
P(v) =
1
2(v + S(v)) sau S(v) = 2P(v) − v , ∀v ∈ V .
Se arata usor ca, daca P ∶ V → V este o proiectie, atunciS ∶ V → V este o simetrie; reciproc, daca S ∶ V → V este osimetrie atunci
P ∶ V → V ,P = 1
2(I + S)
este o proiectie.Daca P si S sunt legate prin
S = 2P − I (⇐⇒ P = 1
2(S + I ))
atunci, ele dau aceeasi scindare:
V = V1 ⊕V2, V1 = FixS = FixP, V2 = ImS = KerP.

Legatura ıntre proiectii si simetriiIntuitiv avem imaginea ....... deci
P(v) = 1
2(v + S(v))
sau S(v) = 2P(v) − v , ∀v ∈ V .
Se arata usor ca, daca P ∶ V → V este o proiectie, atunciS ∶ V → V este o simetrie; reciproc, daca S ∶ V → V este osimetrie atunci
P ∶ V → V ,P = 1
2(I + S)
este o proiectie.Daca P si S sunt legate prin
S = 2P − I (⇐⇒ P = 1
2(S + I ))
atunci, ele dau aceeasi scindare:
V = V1 ⊕V2, V1 = FixS = FixP, V2 = ImS = KerP.

Legatura ıntre proiectii si simetriiIntuitiv avem imaginea ....... deci
P(v) = 1
2(v + S(v)) sau S(v) = 2P(v) − v , ∀v ∈ V .
Se arata usor ca, daca P ∶ V → V este o proiectie, atunciS ∶ V → V este o simetrie; reciproc, daca S ∶ V → V este osimetrie atunci
P ∶ V → V ,P = 1
2(I + S)
este o proiectie.Daca P si S sunt legate prin
S = 2P − I (⇐⇒ P = 1
2(S + I ))
atunci, ele dau aceeasi scindare:
V = V1 ⊕V2, V1 = FixS = FixP, V2 = ImS = KerP.

Legatura ıntre proiectii si simetriiIntuitiv avem imaginea ....... deci
P(v) = 1
2(v + S(v)) sau S(v) = 2P(v) − v , ∀v ∈ V .
Se arata usor ca, daca P ∶ V → V este o proiectie,
atunciS ∶ V → V este o simetrie; reciproc, daca S ∶ V → V este osimetrie atunci
P ∶ V → V ,P = 1
2(I + S)
este o proiectie.Daca P si S sunt legate prin
S = 2P − I (⇐⇒ P = 1
2(S + I ))
atunci, ele dau aceeasi scindare:
V = V1 ⊕V2, V1 = FixS = FixP, V2 = ImS = KerP.

Legatura ıntre proiectii si simetriiIntuitiv avem imaginea ....... deci
P(v) = 1
2(v + S(v)) sau S(v) = 2P(v) − v , ∀v ∈ V .
Se arata usor ca, daca P ∶ V → V este o proiectie, atunciS ∶ V → V este o simetrie; reciproc,
daca S ∶ V → V este osimetrie atunci
P ∶ V → V ,P = 1
2(I + S)
este o proiectie.Daca P si S sunt legate prin
S = 2P − I (⇐⇒ P = 1
2(S + I ))
atunci, ele dau aceeasi scindare:
V = V1 ⊕V2, V1 = FixS = FixP, V2 = ImS = KerP.

Legatura ıntre proiectii si simetriiIntuitiv avem imaginea ....... deci
P(v) = 1
2(v + S(v)) sau S(v) = 2P(v) − v , ∀v ∈ V .
Se arata usor ca, daca P ∶ V → V este o proiectie, atunciS ∶ V → V este o simetrie; reciproc, daca S ∶ V → V este osimetrie atunci
P ∶ V → V ,
P = 1
2(I + S)
este o proiectie.Daca P si S sunt legate prin
S = 2P − I (⇐⇒ P = 1
2(S + I ))
atunci, ele dau aceeasi scindare:
V = V1 ⊕V2, V1 = FixS = FixP, V2 = ImS = KerP.

Legatura ıntre proiectii si simetriiIntuitiv avem imaginea ....... deci
P(v) = 1
2(v + S(v)) sau S(v) = 2P(v) − v , ∀v ∈ V .
Se arata usor ca, daca P ∶ V → V este o proiectie, atunciS ∶ V → V este o simetrie; reciproc, daca S ∶ V → V este osimetrie atunci
P ∶ V → V ,P = 1
2(I + S)
este o proiectie.
Daca P si S sunt legate prin
S = 2P − I (⇐⇒ P = 1
2(S + I ))
atunci, ele dau aceeasi scindare:
V = V1 ⊕V2, V1 = FixS = FixP, V2 = ImS = KerP.

Legatura ıntre proiectii si simetriiIntuitiv avem imaginea ....... deci
P(v) = 1
2(v + S(v)) sau S(v) = 2P(v) − v , ∀v ∈ V .
Se arata usor ca, daca P ∶ V → V este o proiectie, atunciS ∶ V → V este o simetrie; reciproc, daca S ∶ V → V este osimetrie atunci
P ∶ V → V ,P = 1
2(I + S)
este o proiectie.Daca P si S sunt legate prin
S = 2P − I (⇐⇒
P = 1
2(S + I ))
atunci, ele dau aceeasi scindare:
V = V1 ⊕V2, V1 = FixS = FixP, V2 = ImS = KerP.

Legatura ıntre proiectii si simetriiIntuitiv avem imaginea ....... deci
P(v) = 1
2(v + S(v)) sau S(v) = 2P(v) − v , ∀v ∈ V .
Se arata usor ca, daca P ∶ V → V este o proiectie, atunciS ∶ V → V este o simetrie; reciproc, daca S ∶ V → V este osimetrie atunci
P ∶ V → V ,P = 1
2(I + S)
este o proiectie.Daca P si S sunt legate prin
S = 2P − I (⇐⇒ P = 1
2(S + I ))
atunci,
ele dau aceeasi scindare:
V = V1 ⊕V2, V1 = FixS = FixP, V2 = ImS = KerP.

Legatura ıntre proiectii si simetriiIntuitiv avem imaginea ....... deci
P(v) = 1
2(v + S(v)) sau S(v) = 2P(v) − v , ∀v ∈ V .
Se arata usor ca, daca P ∶ V → V este o proiectie, atunciS ∶ V → V este o simetrie; reciproc, daca S ∶ V → V este osimetrie atunci
P ∶ V → V ,P = 1
2(I + S)
este o proiectie.Daca P si S sunt legate prin
S = 2P − I (⇐⇒ P = 1
2(S + I ))
atunci, ele dau aceeasi scindare:
V = V1 ⊕V2, V1 = FixS = FixP, V2 = ImS = KerP.

Legatura ıntre proiectii si simetriiIntuitiv avem imaginea ....... deci
P(v) = 1
2(v + S(v)) sau S(v) = 2P(v) − v , ∀v ∈ V .
Se arata usor ca, daca P ∶ V → V este o proiectie, atunciS ∶ V → V este o simetrie; reciproc, daca S ∶ V → V este osimetrie atunci
P ∶ V → V ,P = 1
2(I + S)
este o proiectie.Daca P si S sunt legate prin
S = 2P − I (⇐⇒ P = 1
2(S + I ))
atunci, ele dau aceeasi scindare:
V = V1 ⊕V2,
V1 = FixS = FixP, V2 = ImS = KerP.

Legatura ıntre proiectii si simetriiIntuitiv avem imaginea ....... deci
P(v) = 1
2(v + S(v)) sau S(v) = 2P(v) − v , ∀v ∈ V .
Se arata usor ca, daca P ∶ V → V este o proiectie, atunciS ∶ V → V este o simetrie; reciproc, daca S ∶ V → V este osimetrie atunci
P ∶ V → V ,P = 1
2(I + S)
este o proiectie.Daca P si S sunt legate prin
S = 2P − I (⇐⇒ P = 1
2(S + I ))
atunci, ele dau aceeasi scindare:
V = V1 ⊕V2, V1 = FixS = FixP,
V2 = ImS = KerP.

Legatura ıntre proiectii si simetriiIntuitiv avem imaginea ....... deci
P(v) = 1
2(v + S(v)) sau S(v) = 2P(v) − v , ∀v ∈ V .
Se arata usor ca, daca P ∶ V → V este o proiectie, atunciS ∶ V → V este o simetrie; reciproc, daca S ∶ V → V este osimetrie atunci
P ∶ V → V ,P = 1
2(I + S)
este o proiectie.Daca P si S sunt legate prin
S = 2P − I (⇐⇒ P = 1
2(S + I ))
atunci, ele dau aceeasi scindare:
V = V1 ⊕V2, V1 = FixS = FixP, V2 = ImS = KerP.










![aplic2 - profs.info.uaic.rofliacob/An1/2007-2008... · OPERATORI LINIARI 91 Probleme rezolvate 1. Dacă T ∈ ℒ(Km, Kn) şi A BB' = [aij] ∈ ℳnm(K) este matricea lui T în perechea](https://static.fdocumente.com/doc/165x107/5e4428eb1349f70d7058f7ef/aplic2-profsinfouaicro-fliacoban12007-2008-operatori-liniari-91-probleme.jpg)






