
Compunerea Acceleratiilor
4
Miscarea relativa a punctului material În capitolel e 8 si 9 s-a studiat miscarea unui punct material sau a unui rigid în raport cu un reper fix (adica miscarea absoluta ). Vom considera în cele ce urmeaza miscarea unui punct material (capitolul 10) în raport cu un reper mobil aflat, la rândul lui, în miscare fata de un reper fix. Se pune în acest caz problema determinarii parametrilor cinematici (traiectorie, viteza, acceleratie) ce caracterizeaza miscarea punctului sau a rigidului în raport cu reperul fix, daca se cunosc parametrii cinematici ce caracterizeaza miscarea punctului sau a rigidului în raport cu reperul mobil si parametrii cinematici ce caracterizeaza miscarea re perului mobil în raport cu cel fix. 10.1. Definitii si exemple Miscarea punctului material în raport cu sistemul fix se numeste miscare absoluta. Viteza (respectiv acceleratia) punctului în aceasta miscare se numeste viteza absoluta (respectiv acceleratie absoluta) si se no te aza cu (r esp ect iv ). Miscarea punctului material în 18118q1618s raport cu sistemul mobil se numeste miscare relativa. Viteza (respectiv acceleratia) punctului în aceasta miscare se numeste viteza relativa (respectiv acceleratie relativa) si se noteaza cu (respectiv ). Se numeste miscare de transport miscarea în raport cu sistemul fix a punctului solidar cu reperul mobil si care în momentul considerat coincide cu punctul a carui miscare se studiaza. Viteza (respectiv acceleratia) punctului în aceasta miscare se numeste viteza de transport (respectiv acceleratie de t ransport ) si se noteaza cu (respectiv ). Exemplu: Se considera o bara OA aflata în miscare de rotatie în jurul capatului articulat O în planul fix (figura T 10.1). În timp ce bara se roteste, un punct material M (un cursor) aluneca în lungul barei de la O spre A. Miscarea absoluta este miscarea punctului fata de reperul fix . Punctul deplasându -se pe OA (considerata ca axa Ox a reperului mobil Oxy ) iar bara rotindu-se în jurul lui OA traiectoria punctului va fi o curba de tip spirala. Miscarea relativa este miscarea punctului fata de reperul mobil Oxy , deci o miscare rectilinie pe OA. Miscarea de transport est e miscarea punctului M considerat imobil fata de reperu l mobil si aflat în miscare fata de cel fix. Ea este o miscare circulara pe cercul cu centrul în O si de raza OM.
-
Upload
vasy-andrew -
Category
Documents
-
view
231 -
download
0
Transcript of Compunerea Acceleratiilor

7/21/2019 Compunerea Acceleratiilor
http://slidepdf.com/reader/full/compunerea-acceleratiilor 1/4
Miscarea relativa a punctului material
În capitolele 8 si 9 s-a studiat miscarea unui punct material sau a unui rigid în raport cuun reper fix (adica miscarea absoluta).
Vom considera în cele ce urmeaza miscarea unui punct material (capitolul 10) în raportcu un reper mobil aflat, la rândul lui, în miscare fata de un reper fix. Se pune în acest cazproblema determinarii parametrilor cinematici (traiectorie, viteza, acceleratie) cecaracterizeaza miscarea punctului sau a rigidului în raport cu reperul fix, daca se cunoscparametrii cinematici ce caracterizeaza miscarea punctului sau a rigidului în raport cu reperulmobil si parametrii cinematici ce caracterizeaza miscarea reperului mobil în raport cu cel fix.
10.1. Definitii si exemple
Miscarea punctului material în raport cu sistemul fix se numestemiscare absoluta.Viteza (respectiv acceleratia) punctului în aceasta miscare se numeste viteza
absoluta (respectiv acceleratie absoluta) si se noteaza cu (respectiv ).
Miscarea punctului material în 18118q1618s raport cu sistemul mobil senumeste miscare relativa. Viteza (respectiv acceleratia) punctului în aceasta miscare se
numeste viteza relativa (respectiv acceleratie relativa) si se noteaza cu (respectiv ).
Se numeste miscare de transport miscarea în raport cu sistemul fix a punctului solidarcu reperul mobil si care în momentul considerat coincide cu punctul a carui miscare sestudiaza. Viteza (respectiv acceleratia) punctului în aceasta miscare se numeste viteza de
transport (respectiv acceleratie de transport ) si se noteaza cu (respectiv ).
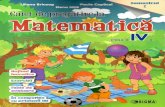
Exemplu: Se considera o bara OA aflata în miscare de rotatie în jurul capatului articulat
O în planul fix (figura T 10.1). În timp ce bara se roteste, un punct material M (uncursor) aluneca în lungul barei de la O spre A. Miscarea absoluta este miscarea punctului fata
de reperul fix . Punctul deplasându-se pe OA (considerata ca axa Ox a reperuluimobil Oxy ) iar bara rotindu-se în jurul lui OA traiectoria punctului va fi o curba de tip spirala.
Miscarea relativa este miscarea punctului fata de reperul mobil Oxy , deci o miscare rectiliniepe OA. Miscarea de transport este miscarea punctului M considerat imobil fata de reperul mobilsi aflat în miscare fata de cel fix. Ea este o miscare circulara pe cercul cu centrul în O si deraza OM.

7/21/2019 Compunerea Acceleratiilor
http://slidepdf.com/reader/full/compunerea-acceleratiilor 2/4
Figura T 10.1 Figura T 10.2
10.2. Derivata absoluta si derivata relativa a unui vector
Fie vectorul definit prin proiectiile sale pe axele reperului mobil Oxyz:
(10.1)
Derivând relatia (10.1) în raport cu timpul t obtinem:
(10.2)
Membrul stâng al relatiei (10.2) reprezinta derivata totala sau absoluta a vectorului
. Prima paranteza din membrul drept reprezinta derivata vectorului fata de sistemul mobil
ca si cum acesta ar fi fix (adica versorii , si nu-si schimba directia). Aceasta derivata
se numeste derivata locala sau relativa a vectorului si se noteaza cu , cu observatia caaceasta notatie nu reprezinta o derivata partiala. Ţinând seama de formulele lui Poisson:
, ,
a doua paranteza capata forma:
(10.3)
Relatia (10.2) devine:
(10.4)
Aceasta relatie reprezinta formula de obtinere a derivatei absolute (fata de reperul fix)
a unui vector dat prin proiectiile sale pe axele reperului mobil.
10.3. Compunerea vitezelor

7/21/2019 Compunerea Acceleratiilor
http://slidepdf.com/reader/full/compunerea-acceleratiilor 3/4
Fie un punct material M aflat în miscare fata de reperul fix si reperulmobil Oxyz (figura T 10.2). Pozitia punctului fata de reperul fix este data prin vectorul de
pozitie iar fata de reperul mobil prin vectorul . Între cei doi vectori exista relatia:
(10.5)
unde este vectorul de pozitie al originii triedrului mobil fata de cel fix.
Derivând în raport cu timpul relatia (10.5) obtinem:
(10.6)
Dar:
- este viteza absoluta (în raport cu reperul fix);
- este viteza absoluta a originii O a reperului mobil;
- este viteza relativa (în raport cu reperul mobil ca si cum acesta ar fi fix).
Observând ca reprezinta viteza unui punct solidar cu triedrul mobil si care
coincide la momentul de timp considerat cu punctul M, adica viteza de transport , obtinem
urmatoarea formula de compunere a vitezelor în miscarea relativa a punctului material:
(10.7)
10.4. Compunerea acceleratiilor
Consideram relatia (10.7) scrisa sub forma:
pe care o derivam în raport cu timpul t :

7/21/2019 Compunerea Acceleratiilor
http://slidepdf.com/reader/full/compunerea-acceleratiilor 4/4
(10.8)
Dar:
- este acceleratia absoluta a punctului M;
- este acceleratia absoluta a punctului O;
; ;
;
- este acceleratia relativa a punctului M.
Suma reprezinta acceleratia unui punct solidar cu triedrul mobilsi care coincide la momentul de timp considerat cu punctul M, adica acceleratia de
transport a punctului M. Termenul se numesteacceleratie Coriolis siexprima influenta simultana a miscarii de rotatie a triedrului mobil fata de cel fix si a miscariirelative a punctului asupra acceleratiei absolute a punctului material. Ţinând cont de acesteobservatii obtinem urmatoarea formula de compunere a acceleratiilor în miscarea relativa apunctului material:











![LIMBA FRANCEZĂ LEXICOLOGIA LIMBII … (e-f... · LIMBA FRANCEZĂ LEXICOLOGIA LIMBII FRANCEZE: 1. Derivarea 2. Compunerea 3. Abrevierea i siglele 4. Neo]ogismele 5. Unitiiţi ale](https://static.fdocumente.com/doc/165x107/5b880a257f8b9aa0218e3905/limba-franceza-lexicologia-limbii-e-f-limba-franceza-lexicologia-limbii.jpg)




