Clasi carea izometriilor planului E2 . Grupuri de simetrii.oanacon/depozit/Izometrii_plan.pdf ·...
63
E E
Transcript of Clasi carea izometriilor planului E2 . Grupuri de simetrii.oanacon/depozit/Izometrii_plan.pdf ·...
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
Clasicarea izometriilor planului E2. Grupuri desimetrii.
Oana Constantinescu
Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
1 Clasicarea transformarilor ortogonale ale unui plan vectorial
euclidian orientat (recapitulare)
2 Clasicarea izometriilor unui plan euclidian
3 Grupuri de simetrii
Clasicarea aplicatiilor ortogonale ale lui(−→E 2, <,>
)
Fie E2 =(E ,−→E ,Φ
)un plan euclidian orientat. Dorim sa clasicam
izometriile sale.
Fie f : E → E o izometrie. In cursul anterior am demonstrat ca f
este un morsm an cu aplicatia liniara asociata ortogonala−→f ∈ O(
−→E ). De aceea consideram utila pentru intelegerea
izometriilor planului o recapitulare a clasicarii aplicatiilor
ortogonale ale lui−→E 2.
Amintim ca valorile proprii ale oricarei aplicatii ortogonale ale unui
spatiu liniar euclidian V sunt ±1.Intr-adevar, daca λ e valoare proprie a lui T ∈ O(V ), atunci pentruorice vector propriu w ∈ V (nenul) corespunzator valorii proprii λare loc < w , w >=< T (w),T (w) >=< λw , λw >= λ2 < w , w >.Deoarece w 6= 0 rezulta ca λ2 = 1.
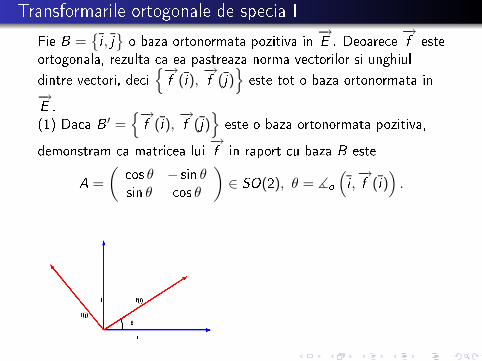
Transformarile ortogonale de specia I
Fie B =i , jo baza ortonormata pozitiva in
−→E . Deoarece
−→f este
ortogonala, rezulta ca ea pastreaza norma vectorilor si unghiul
dintre vectori, deci−→f (i),
−→f (j)
este tot o baza ortonormata in
−→E .
(1) Daca B ′ =−→f (i),
−→f (j)
este o baza ortonormata pozitiva,
demonstram ca matricea lui−→f in raport cu baza B este
A =
(cos θ − sin θsin θ cos θ
)∈ SO(2), θ = ]o
(i ,−→f (i)
).
Intr-adevar−→f (i) =<
−→f (i), i > i+ <
−→f (i), j > j =
(‖−→f (i) ‖‖ i ‖ cos θ
)i +(
‖−→f (i) ‖‖ j ‖ cos(π
2− θ)
)j = cos θi + sin θj . Analog
−→f (j) =
(‖−→f (j) ‖‖ i ‖ cos(π
2+ θ)
)i +(‖−→f (j) ‖‖ j ‖ cos θ
)j =
− sin θi + cos θj .Ecuatia caracteristica asociata lui A este λ2 − (2 cos θ)λ+ 1 = 0.
Observam ca ecuatia are solutii reale daca si numai daca θ = 0, sau
θ = π, caz in care−→f este aplicatia identica Id−→
E, respectiv −Id−→
E.
Pentru−→f 6= ±Id−→
E, ecuatia caracteristica nu are valori proprii reale.
Demonstram ca−→f este Rθ, rotatia geometrica de unghi orientat θ.
Fie v = v1 i + v2 j ∈−→E arbitrar. Deoarece
−→f este ortogonala,
rezulta ca ‖−→f (v) ‖=‖ v ‖. In plus,
−→f (v) = (v1 cos θ − v2 sin θ) i + (v1 sin θ + v2 cos θ) j , de unde
rezulta ca cos
(v ,−→f (v)
)= <v ,
−→f (v)>
‖v‖‖−→f (v)‖
=
v1(v1 cos θ−v2 sin θ)+v2(v1 sin θ+v2 cos θ)‖v‖2 = cos θ.
Analog sin
(v ,−→f (v)
)=
˛˛ v1 v1 cos θ − v2 sin θv2 v1 sin θ + v2 cos θ
˛˛
‖v‖‖−→f (v)‖
= sin θ, deci−→f
este rotatia de unghi θ.Evident Id−→
E= R0 si −Id−→
E= Rπ.
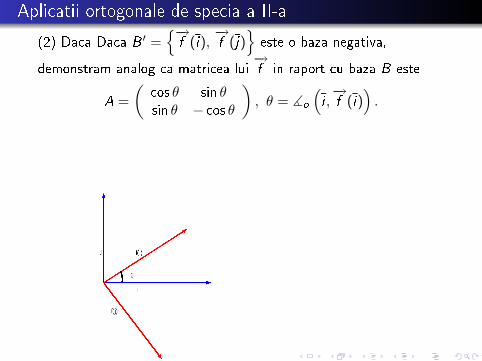
Aplicatii ortogonale de specia a II-a
(2) Daca Daca B ′ =−→f (i),
−→f (j)
este o baza negativa,
demonstram analog ca matricea lui−→f in raport cu baza B este
A =
(cos θ sin θsin θ − cos θ
), θ = ]o
(i ,−→f (i)
).
Ecuatia caracteristica asociata lui−→f este λ2 − 1 = 0, deci
−→f are
valorile proprii ±1. Fie u 6= 0 un vector propriu corespunzator
valorii proprii +1. Daca u = u1 i + u2 j , rezulta ca(cos θ sin θsin θ − cos θ
)(u1u2
)=
(u1u2
)⇔(cos θ − 1)u1 + sin θu2 =
0⇔(− sin θ
2u1 + cos θ
2u2)sin θ
2= 0.
Putem alege u = cos θ2i + sin θ
2j . Acest vector unitar este o baza in
subspatiul liniar U(1) al vectorilor proprii corespunzatori valorii
proprii +1.
Fie v un vector propriu unitar corespunzator valorii proprii −1.Deoarece A este o matrice simetrica rezulta ca
−→f este endomorsm
simetric. Stim ca vectorii proprii corespunzatori unor valori proprii
distincte ale unui endomorsm simetric sunt ortogonali.
Deci u, v este o baza ortonormata a lui−→E .
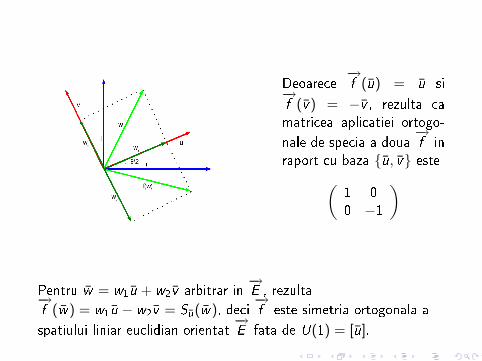
Deoarece−→f (u) = u si
−→f (v) = −v , rezulta ca
matricea aplicatiei ortogo-
nale de specia a doua−→f in
raport cu baza u, v este(1 0
0 −1
)
Pentru w = w1u + w2v arbitrar in−→E , rezulta−→
f (w) = w1u − w2v = Su(w), deci−→f este simetria ortogonala a
spatiului liniar euclidian orientat−→E fata de U(1) = [u].
In concluzie:
orice transformare ortogonala de specia I a planului vectorial
euclidian orientat−→E este o rotatie Rθ :
−→E →
−→E , cu cazul
particular Id−→E;
orice transformare ortogonala de specia a II-a a planului
vectorial euclidian orientat−→E este simetria ortogonala fata de
u, cu u vector propriu corespunzator valorii proprii +1.
Clasicarea izometriilor unui plan euclidian
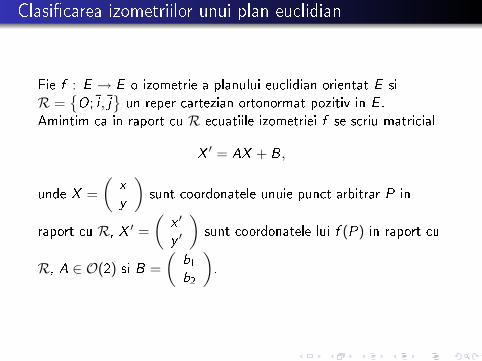
Fie f : E → E o izometrie a planului euclidian orientat E si
R =O; i , j
un reper cartezian ortonormat pozitiv in E .
Amintim ca in raport cu R ecuatiile izometriei f se scriu matricial
X ′ = AX + B,
unde X =
(x
y
)sunt coordonatele unuie punct arbitrar P in
raport cu R, X ′ =
(x ′
y ′
)sunt coordonatele lui f (P) in raport cu
R, A ∈ O(2) si B =
(b1b2
).
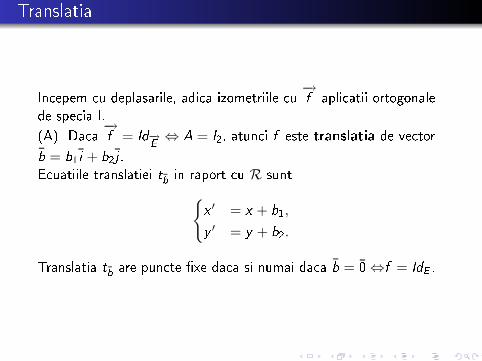
Translatia
Incepem cu deplasarile, adica izometriile cu−→f aplicatii ortogonale
de specia I.
(A) Daca−→f = Id−→
E⇔ A = I2, atunci f este translatia de vector
b = b1 i + b2 j .
Ecuatiile translatiei tb in raport cu R suntx ′ = x + b1,
y ′ = y + b2.
Translatia tb are puncte xe daca si numai daca b = 0⇔f = IdE .
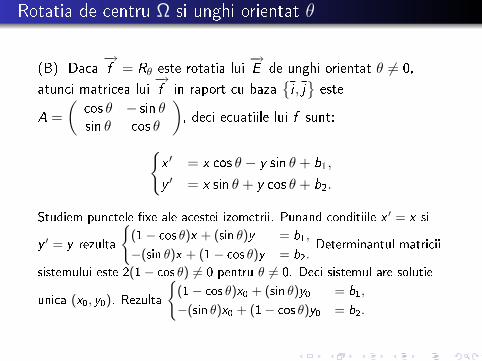
Rotatia de centru Ω si unghi orientat θ
(B) Daca−→f = Rθ este rotatia lui
−→E de unghi orientat θ 6= 0,
atunci matricea lui−→f in raport cu baza
i , jeste
A =
(cos θ − sin θsin θ cos θ
), deci ecuatiile lui f sunt:
x ′ = x cos θ − y sin θ + b1,
y ′ = x sin θ + y cos θ + b2.
Studiem punctele xe ale acestei izometrii. Punand conditiile x ′ = x si
y ′ = y rezulta
(1− cos θ)x + (sin θ)y = b1,
−(sin θ)x + (1− cos θ)y = b2.Determinantul matricii
sistemului este 2(1− cos θ) 6= 0 pentru θ 6= 0. Deci sistemul are solutie
unica (x0, y0). Rezulta
(1− cos θ)x0 + (sin θ)y0 = b1,
−(sin θ)x0 + (1− cos θ)y0 = b2.
Deci ecuatiile lui f suntx ′ = (x − x0) cos θ − (y − y0) sin θ + x0,
y ′ = (x − x0) sin θ + (y − y0) cos θ + y0,
sau, matricial
X ′ = A (X − X0) + X0,
unde X0 e matricea coloana a coordonatelor punctului x. Notam
acest punct x cu Ω.
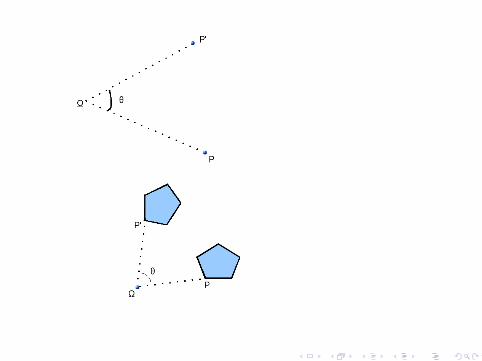
Izometria obtinuta se numeste rotatia de centru Ω si unghi
orientat θ.
Simetria centrala
Observam ca rotatia de centru Ω si unghi π coincide cu simetria
fata de punctul Ω:
SΩ = RΩ,π.
Daca Ω(x0, y0) in raport cu reperul R, rezulta ca ecuatiile simetriei
centrale SΩ sunt x ′ = 2x0 − x ,
y ′ = 2y0 − y .
Antideplasarile planului euclidian
(C) Daca−→f = Su este simetria ortogonala a lui
−→E fata de u, cu
−→f (u) = u , am vazut ca este mai usor sa lucram cu baza u, v,unde
−→f (v) = −v . Deci matricea lui
−→f in raport cu baza u, v
este A′ =
(1 0
0 −1
).
In raport cu reperul R′ = O; u, v, obtinut din R printr-o rotatie
de unghi θ2, ecuatiile izometriei f sunt:
x ′ = x + b1,
y ′ = −y + b2.
Mentionam ca, pentru simplitatea scrierii, am notat coordonatele
punctelor in raport cu noul reper in acelasi mod.
Simetria ortogonala axiala
Studiem punctele xe ale lui f . Observam ca x ′ = x si y ′ = y daca
si numai daca
b1 = 0,
y = b22.
(C1) Daca b1 = 0 izometria f are in raport cu R′ ecuatiilex ′ = x ,
y ′ = −y + b2.
In acest caz dreapta d de ecuatie y = b22(in raport cu R′) este xa
punct cu punct.
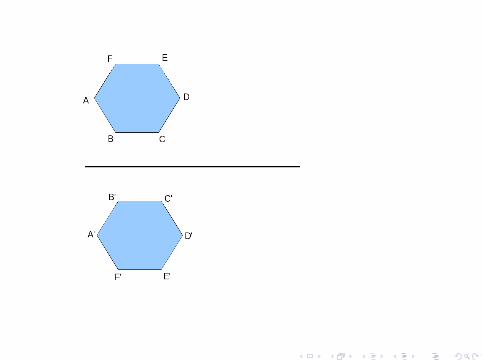
Deci f = Sd este simetria ortogonala a planului E2 fata de
dreapta d .
Remarcam ca directia dreptei d este un vector propriu al lui−→f
corespunzator valorii proprii +1.
Simetria alunecata
(C2) Daca b1 6= 0 izometria f nu are puncte xe. Observam ca
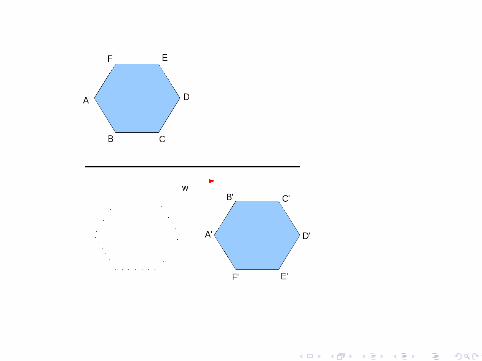
f = tw Sd este compunerea dintre simetria ortogonala fata de
dreapta d si translatia de vector w = b1u ∈−→d :
(x , y) Sd−−→ (x ,−y + b2) tw−−→ (x + b1,−y + b2)
In literatura de specialitate in limba romana nu exista o denumire
consacrata pentru aceasta izometrie, dar o putem numi simetrie
alunecata (in engleza: glide reexion).
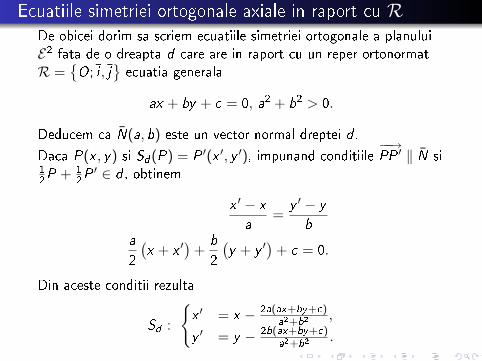
Ecuatiile simetriei ortogonale axiale in raport cu RDe obicei dorim sa scriem ecuatiile simetriei ortogonale a planului
E2 fata de o dreapta d care are in raport cu un reper ortonormat
R =O; i , j
ecuatia generala
ax + by + c = 0, a2 + b2 > 0.
Deducem ca N(a, b) este un vector normal dreptei d .
Daca P(x , y) si Sd (P) = P ′(x ′, y ′), impunand conditiile−−→PP ′ ‖ N si
1
2P + 1
2P ′ ∈ d , obtinem
x ′ − x
a=
y ′ − y
ba
2
(x + x ′
)+
b
2
(y + y ′
)+ c = 0.
Din aceste conditii rezulta
Sd :
x ′ = x − 2a(ax+by+c)
a2+b2,
y ′ = y − 2b(ax+by+c)a2+b2
.
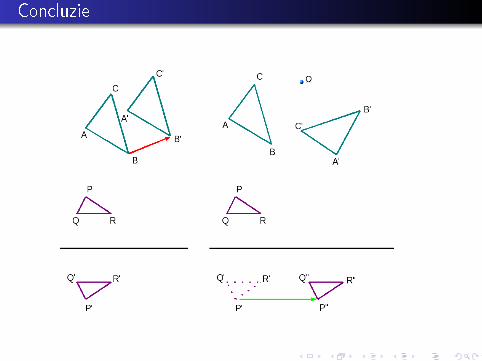
Concluzie
Am obtinut urmatoarea clasicare a izometriilor unui plan euclidian
orientat:
deplasarile:
translatia de vector a
rotatia de centru Ω si unghi orientat θ
antideplasarile:
simetria ortogonala fata de o dreapta d
compunerea dintre simetria ortogonala fata de o dreapta d si o
translatie de vector cu aceeasi directie cu dreapta d
Concluzie
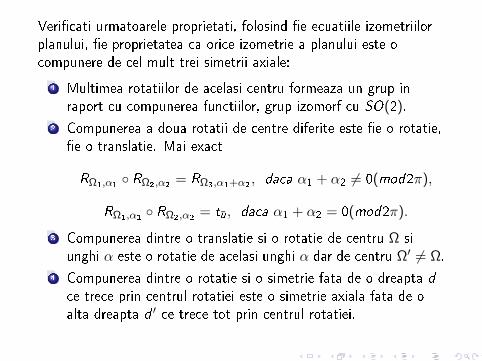
Vericati urmatoarele proprietati, folosind e ecuatiile izometriilor
planului, e proprietatea ca orice izometrie a planului este o
compunere de cel mult trei simetrii axiale:
1 Multimea rotatiilor de acelasi centru formeaza un grup in
raport cu compunerea functiilor, grup izomorf cu SO(2).
2 Compunerea a doua rotatii de centre diferite este e o rotatie,
e o translatie. Mai exact
RΩ1,α1 RΩ2,α2 = RΩ3,α1+α2 , daca α1 + α2 6= 0(mod2π),
RΩ1,α1 RΩ2,α2 = tu, daca α1 + α2 = 0(mod2π).
3 Compunerea dintre o translatie si o rotatie de centru Ω si
unghi α este o rotatie de acelasi unghi α dar de centru Ω′ 6= Ω.
4 Compunerea dintre o rotatie si o simetrie fata de o dreapta d
ce trece prin centrul rotatiei este o simetrie axiala fata de o
alta dreapta d ′ ce trece tot prin centrul rotatiei.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
Rolul grupurilor de transformari in denirea unei geometrii
Felix Klein (1849-1925) a dorit sa aplice conceptul de grup
pentru a caracteriza diferitele geometrii ale timpului.
In discursul inaugural de la Universitatea Erlangen (1872) -
Tendinte recente in cercetarea geometrica - Klein spune:
ind data o varietate si in ea un grup de transformari, sarcina
noastra este sa investigam acele proprietati ale unei guri din
varietate care nu se schimba prin transformarile grupului.
Se da o multime M si SM grupul permutarilor lui M. Orice
subgrup G al lui SM este un grup de transformari ale lui M.
Se studiaza acele proprietati ale gurilor care sunt invariate de
toate elementele lui G . Deci, apriori, M nu are proprietati
geometrice, acestea sunt dictate de grupul G . O geometrie
este notata prin (M,G ).
Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
Rolul grupurilor de transformari in denirea unei geometrii
Felix Klein (1849-1925) a dorit sa aplice conceptul de grup
pentru a caracteriza diferitele geometrii ale timpului.
In discursul inaugural de la Universitatea Erlangen (1872) -
Tendinte recente in cercetarea geometrica - Klein spune:
ind data o varietate si in ea un grup de transformari, sarcina
noastra este sa investigam acele proprietati ale unei guri din
varietate care nu se schimba prin transformarile grupului.
Se da o multime M si SM grupul permutarilor lui M. Orice
subgrup G al lui SM este un grup de transformari ale lui M.
Se studiaza acele proprietati ale gurilor care sunt invariate de
toate elementele lui G . Deci, apriori, M nu are proprietati
geometrice, acestea sunt dictate de grupul G . O geometrie
este notata prin (M,G ).
Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
Simetriile unei guri
Odata xata o geometrie cu un grup de automorsme G , se
poate studia subgrupul automorsmelor care invariaza o gura
xata F . Aceste automorsme se numesc simetrii ale gurii
respective.
Denition
Fie F ⊂ P o gura xata a planului P. Se numeste simetrie a lui
F o izometrie a planului, f : P → P, care invariaza gura F :f (F) = F .
Theorem
Multimea simetriilor gurii F ⊂ P este un subgrup al grupului
izometriilor planului P.
Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
Simetriile unei guri
Odata xata o geometrie cu un grup de automorsme G , se
poate studia subgrupul automorsmelor care invariaza o gura
xata F . Aceste automorsme se numesc simetrii ale gurii
respective.
Denition
Fie F ⊂ P o gura xata a planului P. Se numeste simetrie a lui
F o izometrie a planului, f : P → P, care invariaza gura F :f (F) = F .
Theorem
Multimea simetriilor gurii F ⊂ P este un subgrup al grupului
izometriilor planului P.
Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
Grupuri de simetrii
Dorim sa studiem grupurile de simetrii ale unor poligoane:
grupul simetriilor unui dreptunghi diferit de patrat este grupul
lui Klein
grupul simetriilor unui poligon regulat se numeste grup diedral
subgrupurile ciclice ale acestora formate doar din rotatii
De asemenea, dat un grup de simetrii, vom determina un poligon
care sa aiba drept grup de simetrii pe cel initial
In nal vom determina toate grupurile nite de simetrii,
demonstrand teorema lui Leonardo.
Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.

Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
.
Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
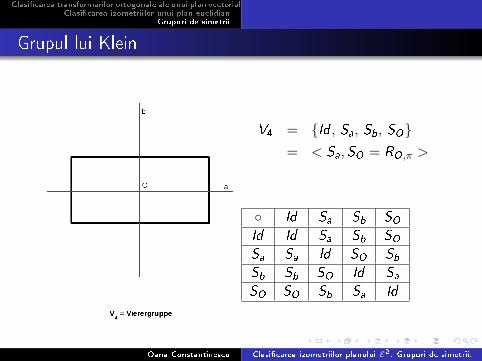
Grupul lui Klein
V4 = Id , Sa, Sb, SO= < Sa, SO = RO,π >
Id Sa Sb SOId Id Sa Sb SOSa Sa Id SO SbSb Sb SO Id SaSO SO Sb Sa Id
Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
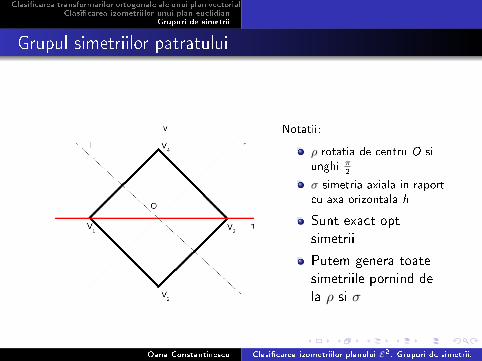
Grupul simetriilor patratului
Notatii:
ρ rotatia de centru O si
unghi π2
σ simetria axiala in raport
cu axa orizontala h
Sunt exact opt
simetrii
Putem genera toate
simetriile pornind de
la ρ si σ
Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
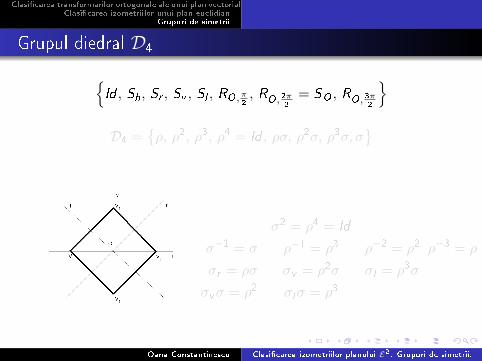
Grupul diedral D4
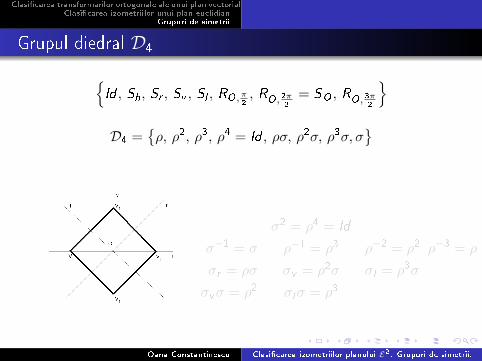
Id , Sh, Sr , Sv , Sl , RO,π
2, RO, 2π
2= SO , RO, 3π
2
D4 =
ρ, ρ2, ρ3, ρ4 = Id , ρσ, ρ2σ, ρ3σ, σ
σ2 = ρ4 = Id
σ−1 = σ ρ−1 = ρ3 ρ−2 = ρ2 ρ−3 = ρ
σr = ρσ σv = ρ2σ σl = ρ3σ
σvσ = ρ2 σlσ = ρ3
Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
Grupul diedral D4
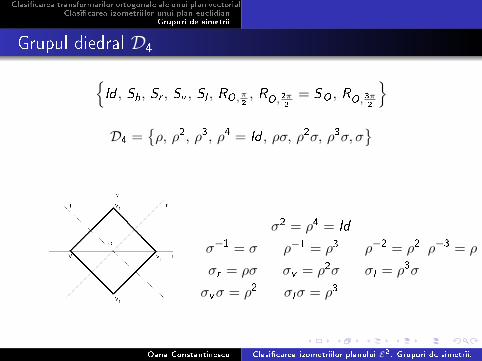
Id , Sh, Sr , Sv , Sl , RO,π
2, RO, 2π
2= SO , RO, 3π
2
D4 =
ρ, ρ2, ρ3, ρ4 = Id , ρσ, ρ2σ, ρ3σ, σ
σ2 = ρ4 = Id
σ−1 = σ ρ−1 = ρ3 ρ−2 = ρ2 ρ−3 = ρ
σr = ρσ σv = ρ2σ σl = ρ3σ
σvσ = ρ2 σlσ = ρ3
Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
Grupul diedral D4
Id , Sh, Sr , Sv , Sl , RO,π
2, RO, 2π
2= SO , RO, 3π
2
D4 =
ρ, ρ2, ρ3, ρ4 = Id , ρσ, ρ2σ, ρ3σ, σ
σ2 = ρ4 = Id
σ−1 = σ ρ−1 = ρ3 ρ−2 = ρ2 ρ−3 = ρ
σr = ρσ σv = ρ2σ σl = ρ3σ
σvσ = ρ2 σlσ = ρ3
Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
Grupul diedral D4
Compunerea dintre o simetrie axiala fata de dreapta d si o
rotatie cu centrul apartinand dreptei d este o simetrie fata de
o dreapta ce trece prin centrul rotatiei.
Deci σρ, σρ2, σρ3 sunt simetrii fata de drepte ce trec prin O,
deci sunt aplicatii involutive.
σρ = (σρ)−1 = ρ−1σ−1 = ρ3σ,
σρ2 = (σρ2)−1 = ρ−2σ−1 = ρ2σ,
σρ3 = (σρ3)−1 = ρ−3σ−1 = ρσ.
Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
Grupul diedral D4
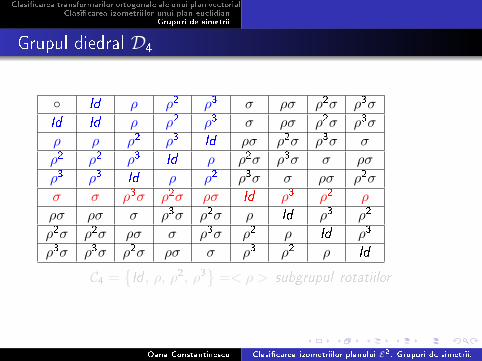
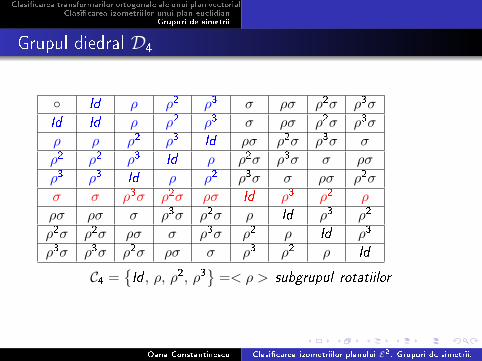
Id ρ ρ2 ρ3 σ ρσ ρ2σ ρ3σ
Id Id ρ ρ2 ρ3 σ ρσ ρ2σ ρ3σ
ρ ρ ρ2 ρ3 Id ρσ ρ2σ ρ3σ σ
ρ2 ρ2 ρ3 Id ρ ρ2σ ρ3σ σ ρσ
ρ3 ρ3 Id ρ ρ2 ρ3σ σ ρσ ρ2σ
σ σ ρ3σ ρ2σ ρσ Id ρ3 ρ2 ρ
ρσ ρσ σ ρ3σ ρ2σ ρ Id ρ3 ρ2
ρ2σ ρ2σ ρσ σ ρ3σ ρ2 ρ Id ρ3
ρ3σ ρ3σ ρ2σ ρσ σ ρ3 ρ2 ρ Id
C4 =Id , ρ, ρ2, ρ3
=< ρ > subgrupul rotatiilor
Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
Grupul diedral D4
Id ρ ρ2 ρ3 σ ρσ ρ2σ ρ3σ
Id Id ρ ρ2 ρ3 σ ρσ ρ2σ ρ3σ
ρ ρ ρ2 ρ3 Id ρσ ρ2σ ρ3σ σ
ρ2 ρ2 ρ3 Id ρ ρ2σ ρ3σ σ ρσ
ρ3 ρ3 Id ρ ρ2 ρ3σ σ ρσ ρ2σ
σ σ ρ3σ ρ2σ ρσ Id ρ3 ρ2 ρ
ρσ ρσ σ ρ3σ ρ2σ ρ Id ρ3 ρ2
ρ2σ ρ2σ ρσ σ ρ3σ ρ2 ρ Id ρ3
ρ3σ ρ3σ ρ2σ ρσ σ ρ3 ρ2 ρ Id
C4 =Id , ρ, ρ2, ρ3
=< ρ > subgrupul rotatiilor
Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
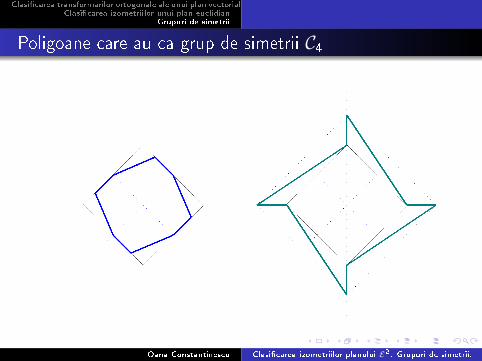
Poligoane care au ca grup de simetrii C4
Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
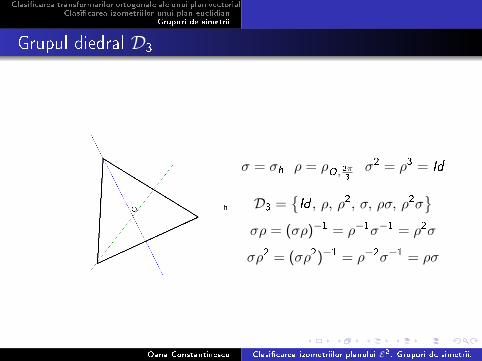
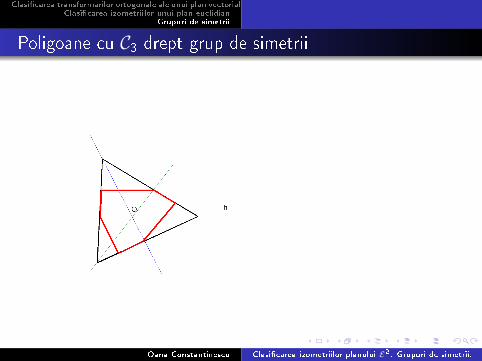
Grupul diedral D3
σ = σh ρ = ρO, 2π3
σ2 = ρ3 = Id
D3 =Id , ρ, ρ2, σ, ρσ, ρ2σ
σρ = (σρ)−1 = ρ−1σ−1 = ρ2σ
σρ2 = (σρ2)−1 = ρ−2σ−1 = ρσ
Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
Grupul diedral D3
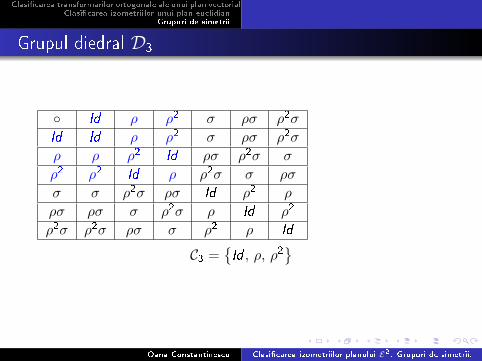
Id ρ ρ2 σ ρσ ρ2σ
Id Id ρ ρ2 σ ρσ ρ2σ
ρ ρ ρ2 Id ρσ ρ2σ σ
ρ2 ρ2 Id ρ ρ2σ σ ρσ
σ σ ρ2σ ρσ Id ρ2 ρ
ρσ ρσ σ ρ2σ ρ Id ρ2
ρ2σ ρ2σ ρσ σ ρ2 ρ Id
C3 =Id , ρ, ρ2
Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
Poligoane cu C3 drept grup de simetrii
Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
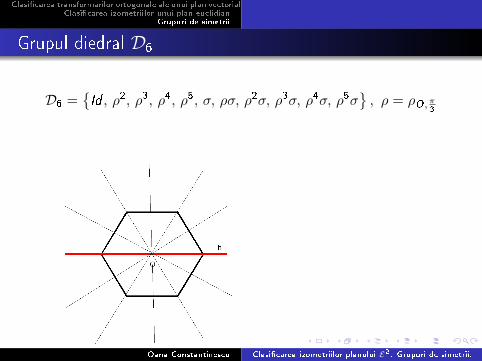
Grupul diedral D6
D6 =Id , ρ2, ρ3, ρ4, ρ5, σ, ρσ, ρ2σ, ρ3σ, ρ4σ, ρ5σ
, ρ = ρO,π
3
Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
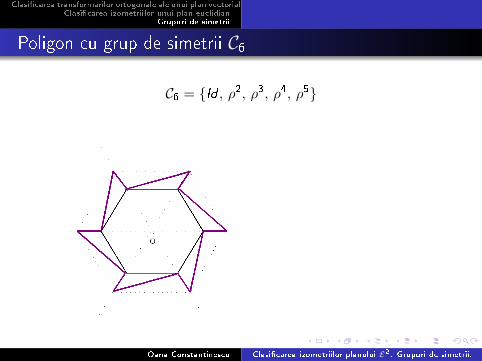
Poligon cu grup de simetrii C6
C6 = Id , ρ2, ρ3, ρ4, ρ5
Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
Grupul diedral Dn si subgrupul rotatiilor CnAvand un poligon regulat cu n laturi, ecare varf Vi poate
dus printr-o simetrie intr-unul din cele n varfuri ale poligonului,
de exemplu Vk . Atunci un varf vecin lui Vi poate dus prin
acea simetrie intr-unul din varfurile vecine ale lui Vk . Deci in
total avem 2n posibilitati. Cum imaginea poligonului regulat
printr-o simetrie este determinata atunci cand se cunosc
imaginile a doua varfuri vecine prin acea simetrie, rezulta ca
exista cel mult 2n simetrii pentru poligonul respectiv.
Fie h una din axele de simetrie ale poligonului regulat. Notam
cu σ simetria axiala in raport cu h si cu ρ rotatia de centru O
(centrul de simetrie al poligonului, situat la intersectia axelor
sale de simetrie) si unghi orientat 2πn.
Id , ρ, ρ2, · · · , ρn−1, ρσ, ρ2σ, · · · , ρn−1σsunt 2n simetrii ale
poligonului, deci acestea sunt toate simetriile posibile. In
consecinta Dn =< ρ, σ > si subgrupul rotatiilor sale este
grupul ciclic Cn =< ρ > de ordin n.Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
Grupul diedral Dn si subgrupul rotatiilor CnAvand un poligon regulat cu n laturi, ecare varf Vi poate
dus printr-o simetrie intr-unul din cele n varfuri ale poligonului,
de exemplu Vk . Atunci un varf vecin lui Vi poate dus prin
acea simetrie intr-unul din varfurile vecine ale lui Vk . Deci in
total avem 2n posibilitati. Cum imaginea poligonului regulat
printr-o simetrie este determinata atunci cand se cunosc
imaginile a doua varfuri vecine prin acea simetrie, rezulta ca
exista cel mult 2n simetrii pentru poligonul respectiv.
Fie h una din axele de simetrie ale poligonului regulat. Notam
cu σ simetria axiala in raport cu h si cu ρ rotatia de centru O
(centrul de simetrie al poligonului, situat la intersectia axelor
sale de simetrie) si unghi orientat 2πn.
Id , ρ, ρ2, · · · , ρn−1, ρσ, ρ2σ, · · · , ρn−1σsunt 2n simetrii ale
poligonului, deci acestea sunt toate simetriile posibile. In
consecinta Dn =< ρ, σ > si subgrupul rotatiilor sale este
grupul ciclic Cn =< ρ > de ordin n.Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
Dn
Pentru a completa tabela grupului procedam astfel. Pentru
primele n linii folosim ρn = σ2 = Id si ecare linie se obtine
practic din precedenta prin compunere la stanga cu ρ.
Pentru linia corespunzatoare lui σ folosim faptul ca orice
compunere dintre o simetrie axiala si o rotatie este o simetrie
axiala, deci o aplicatie involutiva. Astfel,
(σρk)−1 = σρk , ∀k ∈ 1, n − 1. Deci
σρk = ρn−kσ, ∀k ∈ 1, n − 1.
Dupa completarea acestei linii, ultimele n − 1 linii se obtin
ecare din precedenta prin compunere la stanga cu ρ.
D1 =< σ > e grupul simetriilor unui triunghi isoscel
neechilateral, iar C1 = Id.D2 =< σ,RO,π = σO >= V4, iar C2 = Id , ρO,π e grupul
simetriilor unui paralelogram diferit de romb.Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
Dn
Pentru a completa tabela grupului procedam astfel. Pentru
primele n linii folosim ρn = σ2 = Id si ecare linie se obtine
practic din precedenta prin compunere la stanga cu ρ.
Pentru linia corespunzatoare lui σ folosim faptul ca orice
compunere dintre o simetrie axiala si o rotatie este o simetrie
axiala, deci o aplicatie involutiva. Astfel,
(σρk)−1 = σρk , ∀k ∈ 1, n − 1. Deci
σρk = ρn−kσ, ∀k ∈ 1, n − 1.
Dupa completarea acestei linii, ultimele n − 1 linii se obtin
ecare din precedenta prin compunere la stanga cu ρ.
D1 =< σ > e grupul simetriilor unui triunghi isoscel
neechilateral, iar C1 = Id.D2 =< σ,RO,π = σO >= V4, iar C2 = Id , ρO,π e grupul
simetriilor unui paralelogram diferit de romb.Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
Dn
Pentru a completa tabela grupului procedam astfel. Pentru
primele n linii folosim ρn = σ2 = Id si ecare linie se obtine
practic din precedenta prin compunere la stanga cu ρ.
Pentru linia corespunzatoare lui σ folosim faptul ca orice
compunere dintre o simetrie axiala si o rotatie este o simetrie
axiala, deci o aplicatie involutiva. Astfel,
(σρk)−1 = σρk , ∀k ∈ 1, n − 1. Deci
σρk = ρn−kσ, ∀k ∈ 1, n − 1.
Dupa completarea acestei linii, ultimele n − 1 linii se obtin
ecare din precedenta prin compunere la stanga cu ρ.
D1 =< σ > e grupul simetriilor unui triunghi isoscel
neechilateral, iar C1 = Id.D2 =< σ,RO,π = σO >= V4, iar C2 = Id , ρO,π e grupul
simetriilor unui paralelogram diferit de romb.Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.

Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
Dn
Pentru a completa tabela grupului procedam astfel. Pentru
primele n linii folosim ρn = σ2 = Id si ecare linie se obtine
practic din precedenta prin compunere la stanga cu ρ.
Pentru linia corespunzatoare lui σ folosim faptul ca orice
compunere dintre o simetrie axiala si o rotatie este o simetrie
axiala, deci o aplicatie involutiva. Astfel,
(σρk)−1 = σρk , ∀k ∈ 1, n − 1. Deci
σρk = ρn−kσ, ∀k ∈ 1, n − 1.
Dupa completarea acestei linii, ultimele n − 1 linii se obtin
ecare din precedenta prin compunere la stanga cu ρ.
D1 =< σ > e grupul simetriilor unui triunghi isoscel
neechilateral, iar C1 = Id.D2 =< σ,RO,π = σO >= V4, iar C2 = Id , ρO,π e grupul
simetriilor unui paralelogram diferit de romb.Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
Teorema lui Leonardo
Pana in acest moment am reusit sa demonstram urmatorul rezultat:
Theorem
Pentru orice n ∈ N∗, exista cate un poligon care are ca grup de
simetrii pe Dn si respectiv pe Cn.
Ne intereseaza rezultatul reciproc: orice grup nit de simetrii al
unei guri plane este de tipul Dn sau Cn?Hermann Weyl (1885-1955) arma in cartea Symmetry, Princeton
University Press, 1951, ca Leonardo da Vinci (1452-1519) era
preocupat de aceasta problema. Mai exact acesta determina in mod
sistematic simetriile unei cladiri centrale si studia cum sa ataseze
capele, nise, etc, fara a strica simetria nucleului.
Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
Teorema lui Leonardo
Pana in acest moment am reusit sa demonstram urmatorul rezultat:
Theorem
Pentru orice n ∈ N∗, exista cate un poligon care are ca grup de
simetrii pe Dn si respectiv pe Cn.
Ne intereseaza rezultatul reciproc: orice grup nit de simetrii al
unei guri plane este de tipul Dn sau Cn?Hermann Weyl (1885-1955) arma in cartea Symmetry, Princeton
University Press, 1951, ca Leonardo da Vinci (1452-1519) era
preocupat de aceasta problema. Mai exact acesta determina in mod
sistematic simetriile unei cladiri centrale si studia cum sa ataseze
capele, nise, etc, fara a strica simetria nucleului.
Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
Teorema lui Leonardo
Pana in acest moment am reusit sa demonstram urmatorul rezultat:
Theorem
Pentru orice n ∈ N∗, exista cate un poligon care are ca grup de
simetrii pe Dn si respectiv pe Cn.
Ne intereseaza rezultatul reciproc: orice grup nit de simetrii al
unei guri plane este de tipul Dn sau Cn?Hermann Weyl (1885-1955) arma in cartea Symmetry, Princeton
University Press, 1951, ca Leonardo da Vinci (1452-1519) era
preocupat de aceasta problema. Mai exact acesta determina in mod
sistematic simetriile unei cladiri centrale si studia cum sa ataseze
capele, nise, etc, fara a strica simetria nucleului.
Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
Teorema lui Leonardo
Theorem
Singurele grupuri nite de izometrii sunt Cn si Dn.
Corollary
(Leonardo) Dat un poligon oarecare, grupul sau de simetrii este Dn
sau Cn.
Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
Teorema lui Leonardo
Theorem
Singurele grupuri nite de izometrii sunt Cn si Dn.
Corollary
(Leonardo) Dat un poligon oarecare, grupul sau de simetrii este Dn
sau Cn.
Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.
Theorem
Singurele grupuri nite de izometrii sunt Cn si Dn.
Demonstratie
Fie G un grup nit de izometrii ale planului P. Rezulta ca acesta
nu poate contine translatii sau compuneri de translatii cu simetrii
axiale, deoarece acestea ar genera un subgrup innit. In consecinta
G contine doar rotatii si simetrii axiale.
Caz I Presupunem ca G contine doar rotatii:
G = C1 = Id∃RA,α ∈ G, RA,α 6= Id . In aceasta situatie demonstram ca
toate rotatiile sunt de centru A.
Pp prin reducere la absurd ca ∃RB,β ∈ G cu A 6= B. Atunci
R−1B,βR
−1A,αRB,βRA,α ∈ G. Dar aceasta compunere de rotatii
este o translatie diferita de Id caci suma unghiurilor
orientate ale acestor rotatii este 0. Se contrazice astfel
ipoteza ca G e grup nit.
Deci ∀n ∈ N : RnA,α = RA,nα ∈ G si R−1A,α = RA,−α ∈ G. Astfel,
toate elementele grupului pot scrise sub forma RA,α cu
0 ≤ α ≤ 2π.Fie α0 valoarea minima (pozitiva) pe care o poate lua unghiul unei
rotatii din G. Se demonstreaza prin reducere la absurd ca
∀RA,β ∈ G, ∃k ∈ N∗ astfel incat β = kα0. Deci orice rotatie a
grupului este de tipul RA,kα0 = RkA,α0
, pentru un anumit k natural,
deci este generata de RA,α0 . In concluzie
G =< RA,α0 >= Cm, RmA,α0
= Id .
Caz II Presupunem ca G contine cel putin o simetrie axiala
σ.
Deoarece o izometrie si inversa ei sunt de aceeasi specie, iar
compunerea a doua izometrii de specia I este o izometrie de specia
I, rezulta ca multimea izometriilor de specia I ale lui G formeaza un
subgrup al acestuia, ce contine doar rotatii. Conform primului caz,
rezulta ca acest subgrup e de tipul Cn = Id , ρ, · · · , ρn−1. Ampresupus ca numarul izometriilor de specia I ale lui G este n.
Deci ∀n ∈ N : RnA,α = RA,nα ∈ G si R−1A,α = RA,−α ∈ G. Astfel,
toate elementele grupului pot scrise sub forma RA,α cu
0 ≤ α ≤ 2π.Fie α0 valoarea minima (pozitiva) pe care o poate lua unghiul unei
rotatii din G. Se demonstreaza prin reducere la absurd ca
∀RA,β ∈ G, ∃k ∈ N∗ astfel incat β = kα0. Deci orice rotatie a
grupului este de tipul RA,kα0 = RkA,α0
, pentru un anumit k natural,
deci este generata de RA,α0 . In concluzie
G =< RA,α0 >= Cm, RmA,α0
= Id .
Caz II Presupunem ca G contine cel putin o simetrie axiala
σ.
Deoarece o izometrie si inversa ei sunt de aceeasi specie, iar
compunerea a doua izometrii de specia I este o izometrie de specia
I, rezulta ca multimea izometriilor de specia I ale lui G formeaza un
subgrup al acestuia, ce contine doar rotatii. Conform primului caz,
rezulta ca acest subgrup e de tipul Cn = Id , ρ, · · · , ρn−1. Ampresupus ca numarul izometriilor de specia I ale lui G este n.

Presupunem ca G contine m ≥ 1 izometrii de specia a II-a.
Deoarece σ, ρσ, ρ2σ, · · · , ρn−1σ sunt izometrii de specia a II-a,
rezulta ca m ≥ n.
Dar cele m izometrii de specia a doua, compuse la dreapta cu σ,dau m izometrii de specia I, deci m ≤ n. In concluzie
m = n⇒ OrdG = 2n si
G =Id , ρ, · · · , ρn−1, σ, ρσ, ρ2σ, · · · , ρn−1σ
.
Pentru n = 1 avem G =< σ >= D1, iar pentru n > 1,
ρkσ, ∀k ∈ 1, n − 1 este o simetrie fata de o dreapta ce trece prin
centrul A al rotatiei ρ. Deci G = Dn.

Presupunem ca G contine m ≥ 1 izometrii de specia a II-a.
Deoarece σ, ρσ, ρ2σ, · · · , ρn−1σ sunt izometrii de specia a II-a,
rezulta ca m ≥ n.
Dar cele m izometrii de specia a doua, compuse la dreapta cu σ,dau m izometrii de specia I, deci m ≤ n. In concluzie
m = n⇒ OrdG = 2n si
G =Id , ρ, · · · , ρn−1, σ, ρσ, ρ2σ, · · · , ρn−1σ
.
Pentru n = 1 avem G =< σ >= D1, iar pentru n > 1,
ρkσ, ∀k ∈ 1, n − 1 este o simetrie fata de o dreapta ce trece prin
centrul A al rotatiei ρ. Deci G = Dn.
Clasicarea transformarilor ortogonale ale unui plan vectorial euclidian orientat (recapitulare)Clasicarea izometriilor unui plan euclidian
Grupuri de simetrii
Bibliograe
1 Mircea Ganga, Manual Algebra clasa a XII-a, Mathpress,
Ploiesti, 2003
2 George E. Martin, Transformation Geometry, An Introduction
to Symmetry, Springer, 1982
3 Liviu Ornea, Adriana Turtoi, O introducere in geometrie,
Theta, Bucuresti 2011
4 Ioan Pop, Geometrie ana, euclidiana si proiectiva, Editura
Universitatii Al.I.Cuza, Iasi, 1999
Oana Constantinescu Clasicarea izometriilor planului E2. Grupuri de simetrii.