cap.5 eim
55
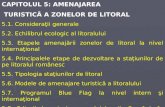
Robotic\ 167 CAPITOLUL 5 SISTEMUL DE COMAND| AL ROBO}ILOR INDUSTRIALI 5.1 Func]ia de comand\. No]iuni. Defini]ii Func]ia de comand\ const\ `n impunerea succesiunii mi[c\rilor executate de elementele sistemului mecanic [i de ac]ionare `n conformitate cu ciclul de lucru care trebuie executat. Comanda reprezint\ setul de informa]ii transmise c\tre sistemul de ac]ionare [i care prescrie func]ionarea acestuia din urm\. Intrefa]a reprezint\ zona de amplasare a leg\turilor dintre sistemul de comand\, pe de o parte [i sistemele mecanice, de ac]ionare [i mediul, pe de alt\ parte. Sistemele de comand\, comenzile [i modurile de realizare a acestora rezult\ din fig. 5.1. Mediu Sistemul de ac]ionare Sistemul mecanic Sistemul de comand\ a) Comand\ `n “bucl\ deschis\” leg\tura invers\ b) Comanda `n “bucl\ `nchis\” c) Tipuri de comenzi d) Variante de realizare a comenzii Sistemul de comand\ Sistemul de ac]ionare Secven]ial\ Continu\ Continu\ Automat\ Secven]ial\ Comanda Comanda Mediu Sistemul mecanic Fig. 5.1. Clasificarea sistemelor de comand\, a comenzilor [i a modurilor de realizare a acestora.
-
Upload
iulia-elena-lupu -
Category
Documents
-
view
14 -
download
4
description
eim
Transcript of cap.5 eim

Robotic\ 167 CAPITOLUL 5
SISTEMUL DE COMAND| AL ROBO}ILOR INDUSTRIALI
5.1 Func]ia de comand\. No]iuni. Defini]ii Func]ia de comand\ const\ `n impunerea succesiunii mi[c\rilor executate de elementele sistemului mecanic [i de ac]ionare `n conformitate cu ciclul de lucru care trebuie executat. Comanda reprezint\ setul de informa]ii transmise c\tre sistemul de ac]ionare [i care prescrie func]ionarea acestuia din urm\. Intrefa]a reprezint\ zona de amplasare a leg\turilor dintre sistemul de comand\, pe de o parte [i sistemele mecanice, de ac]ionare [i mediul, pe de alt\ parte. Sistemele de comand\, comenzile [i modurile de realizare a acestora rezult\ din fig. 5.1.
Mediu Sistemul de ac]ionare
Sistemul mecanic
Sistemul de comand\
a) Comand\ `n “bucl\ deschis\” leg\tura invers\ b) Comanda `n “bucl\ `nchis\” c) Tipuri de comenzi d) Variante de realizare a comenzii
Sistemul de comand\
Sistemul de ac]ionare
Secven]ial\
Continu\ Continu\
Automat\
Secven]ial\
Comanda Comanda
Mediu Sistemul mecanic
Fig. 5.1. Clasificarea sistemelor de comand\, a comenzilor [i a modurilor
de realizare a acestora.

Sistemul de comand\ al robo]ilor industriali 168
Sistemul de comand\ `n bucl\ deschis\ (fig. 5.1, a) realizeaz\ fluxul de informa]ii `ntr-un singur sens, f\r\ ca natura comenzilor s\ fie influen]at\ de mediu. Sistemul de comand\ `n bucl\ `nchis\ (fig. 5.1, b) realizeaz\ fluxuri de informa]ii bilaterale sau de complexitate mai mare, `n scopul de a pune `n concordan]\ starea intern\ a robotului cu starea extern\, a mediului. Starea intern\ cuprinde totalitatea datelor care caracterizeaz\ starea sistemului mecanic (pozi]iile, st\rile de mi[care, for]e, reac]iuni, momente, temperaturi `n anumite zone etc.) [i ale celor referitoare la sistemul de ac]ionare (tensiuni, intensitate, frecven]e, presiuni, debite, viteze etc.). Starea extern\ cuprinde totalitatea datelor care caracterizeaz\ mediul `n care evolueaz\ robotul industrial. Ele se refer\ la configura]ia geometric\ a mediului (pozi]ia [i dimensiunile obiectelor din mediu), temperaturi, compozi]ia chimic\, pozi]ia obiectelor de manipulat etc. Datele referitoare la starea intern\ [i extern\ sunt sesizate de traductoare [i senzori (capitolul 4)
Sistemul de comand\ recep]ioneaz\ [i prelucreaz\ informa]iile (datele) transmise de traductori [i senzori [i, printr-un sistem de feedback -
Fig. 5.2. Structura sistemelor de comand\ automat\ a robo]ilor industriali

Robotic\ 169 leg\tur\ invers\ (fig. 5.1, b, fig. 5.2.), transmite comenzi sistemului de ac]ionare pentru punerea `n mi[care a cuplelor conduc\toare. Comenzile pot fi realizate secven]ial sau continuu (fig. 5.1, c). ~n cazul comenzilor secven]iale, cuplele cinematice sunt puse `n mi[care `n mod succesiv, pe când `n cazul comenzilor continui cuplele cinematice, având eventual parametrii cinematici variabili `n timp, sunt ac]ionate simultan, `n func]ie de opera]iile de executat. Comanda manual\ (fig. 5.1, d) se realizeaz\ prin intermediul ac]iunii operatorului uman, `n timp ce comanda automat\ se face prin intermediul unui sistem programabil, cu programare rigid\ (nemodificabil\) sau flexibil\. Modificarea programului poate fi f\cut\ prin programare sau prin adaptare. Comanda mixt\ (de supervizare) realizeaz\ conducerea robotului atât prin ac]iunea operatorului uman cât [i cu ajutorul unui sistem automat. Ultimele dou\ variante de comand\ (fig. 5.1, d), care pot fi cu `nv\]are [i adaptive, con]in elemente de inteligen]\ artificial\. ~n mare, prin inteligen]\ artificial\ `n]elegem capacitatea sistemului tehnic, `n cazul nostru a robotului industrial, de a se adapta la mediu [i la sarcini variabile, specifice activit\]ii robo]ilor. Complexitatea sistemului de comand\, respectiv gradul s\u de inteligen]\ artificial\, depinde de complexitatea sarcinilor de executat; el influen]eaz\ `n mod substan]ial (30 - 50%) costul robo]ilor industriali.
5.2. Structura sistemelor de comand\ ale robo]ilor industriali
Majoritatea robo]ilor industriali con]in sisteme de comand\ automat\. La 95% din ace[tia, comanda se realizeaz\ pe principii electrice sau electronice, 3% pe principii pneumatice [i 2% pe principii hidraulice. Comenzile pneumatice [i hidraulice, interesante ca principiu [i tehnic\ [i care se preteaz\ la ample cercet\ri experimentale, se utilizeaz\ doar pentru robo]i [i manipulatoare de construc]ie simpl\, care func]ioneaz\ `n medii explozive. ~n fig. 5.2 se prezint\ structura unui sistem automat de comand\, din care rezult\ elementele componente principale [i modul lor de interfa]are (legare) informa]ional\ [i opera]ional\. 5.2.1 Programele [i dispozitivele de introducere a datelor Programele fac parte din sistemele software ale robo]ilor cu comand\ automat\ [i con]in informa]iile codificate pentru opera]iile ce trebuie executate. Aceste informa]ii se refer\ la: - coordonatele [i, eventual, valorile vitezelor liniare a punctului caracteristic, precum [i ale parametrilor de pozi]ionare a dreptelor caracteristice;

Sistemul de comand\ al robo]ilor industriali 170
- timpii de repaus; -comenzi de `ncepere/sfâr[it ale mi[c\rilor cuplelor cinematice, de salt, succesiune [i de corelare; - comenzi de decizie [i comenzi c\tre alte ma[ini [i dispozitive periferice etc., cu care robotul intr\ `n interac]iune. Programele specifice robo]ilor industriali pot fi grupate sau clasificate a[a cum se vede `n fig. 5.3.
Programe
-secven]ionale-punct `n punct-de traiectorie-de suprafa]\-de volum
-de lucru-reglaj-de redundan]\
-rigide-flexibile
introduse:-manual-automat-prin `nv\]are
realizate prin:-preprogramare-programare liber\-programare de stop
Fig. 5.3. Clasificarea programelor Programele rigide nu pot fi modificate decât printr-o interven]ie major\, complex\ [i costisitoare, asupra sistemului de comand\. Ele sunt specifice robo]ilor [i manipulatoarelor neevoluate. Programele flexibile pot fi modificate, cu u[urin]\ [i cu cheltuieli minime, pentru diverse sarcini. Programele de lucru comand\ opera]iile propriu-zise, `n timp ce programele de reglaj reprezint\ programele necesare “`nv\]\rii”. Programele redundante sunt ni[te programe paralele sau auxiliare care preiau controlul comenzilor când `n programul de lucru apar defec]iuni sau comenzi de cedare a controlului comenzilor de lucru. Programele secven]iale impun ac]ionarea succesiv\ [i separat\ a mi[c\rilor relative ale elementelor cuplelor cinematice. Programele punct cu punct (PTP-point to point) impun deplasarea punctului caracteristic pe pozi]ii succesive, discrete, f\r\ descrierea traiectoriei de trecere de la un punct la altul. Programele de generare a traiectoriei (de conturare, CP-continous path) impun deplasarea punctului caracteristic dup\ o traiectorie (contur) prescris\, eventual cu viteze prescrise. Programele de descriere a suprafe]elor impun deplasarea punctului careacteristic pe o suprafa]\, `n timp ce cele de volum impun ocuparea unor pozi]ii distribuite `ntr-un anume volum. Programele punct cu punct con]in informa]ii privind coordonatele punctelor caracteristice, programele de “traiectorie” con]in suplimentar [i legile de mi[care (vitezele), cele de “suprafa]\” con]in coordonatele `n spa]iu ale unei pozi]ii a punctului caracteristic [i legile (rela]iile de calcul [i algoritmii de rezolvare) care descriu suprafa]a ce trebuie baleiat\ de punctul caracteristic, iar programele de “volum” con]in coordonatele unei

Robotic\ 171 pozi]ii a punctului caracteristic [i parametrii volumului respectiv (legea de umplere a acestui volum). Preprogamarea se realizeaz\ `n alt\ zon\, special\, eventual folosind tehnica realit\]ii virtuale, decât cea `n care evolueaz\ robotul. Acest tip de programare prezint\ dificult\]i din cauza complexit\]ii geometrice a configura]iei spa]iului de evolu]ie. Programarea liber\ se realizeaz\ `n zona spa]iului de evolu]ie [i `n prezen]a obiectului de manipulat. Programarea de scop este caracteristic\ robo]ilor evolua]i, cu elemente de inteligen]\ artificial\. ~n aceste programe se prescrie scopul (opera]iile de efectuat), limitele [i “restric]iile”, urmând ca sistemul de comand\ s\ aleag\ “strategia”, “tacticile” [i comenzile necesare atingerii scopului. Dup\ modul de introducere `n sistemul de comand\, programele pot fi introduse manual, automat [i prin `nv\]are, prin intermediul unui dispozitiv, a[a cum rezult\ din fig. 5.1. Pentru introducerea manual\ a programelor se folosesc o serie de dispozitive prev\zute cu `ntrerup\toare, jacuri amplasate matricial, comutatoare rotative decadale, blocuri de taste, schimbarea unor came sau a pozi]iei acestora, a profilului sau a configura]iei acestora, tastaturi de programare, eventual cu display pentru vizualizarea comenzilor. Ca dispozitive pentru introducerea automat\ a programelor se utilizeaz\ cititori (lectori) de band\ electromecanici sau fotoelectrici, cititoare de cartele perforate sau calculatoare de proces speciale. Introducerea programelor “prin `nv\]are (teach-in)” se realizeaz\ cu ajutorul unui dispozitiv cu tastatur\ special\ sau prin conducerea manual\ a apuc\torului. Dispozitivele cu tastatur\ permit ac]ionarea manual\ a robotului [i memorarea mi[c\rilor [i a parametrilor geometrici pozi]ionali ai punctului [i dreptelor caracteristice, a timpilor de repaus, a semnalelor de corelare etc. Datele `nregistrate [i memorate constituie un program care permite executarea automat\ prin repetare a mi[c\rilor. Vitezele de execu]ie pot fi modificate prin modificarea vitezei de rulare a programelor “ini]iale”. ~n cazul conducerii manuale, “`nv\]area” robotului se face prin deplasarea apuc\torului conform opera]iilor de executat. Mi[c\rile [i pozi]iile sunt memorate, iar corelarea lor se face prin tastatur\. De exemplu, robo]ii Tralfa (Norvegia) sunt programa]i (prin `nv\]are) s\ execute opera]ii de vopsire, la fel ca [i robo]ii române[ti RIS. ~n cazul `n care ac]ionarea manual\ este dificil\, se recurge la simularea cu modele sau pe calculator, utilizând, eventual tehnicile “realit\]ii virtuale”. 5.2.2. Dispozitivele de comand\

Sistemul de comand\ al robo]ilor industriali 172
Dispozitivele de comand\ din structura sistemului de comand\ `ndeplinesc urm\toarele func]iuni: - analiza informa]iilor senzorilor [i realizarea interbloc\rilor necesare efectu\rii opera]iunilor; prin interblocare vom `n]elege condi]ionarea unei anumite opera]ii (mi[c\ri) de existen]a/inexisten]a unui semnal despre o anumit\ stare sau de efectuarea/neefectuarea prealabil\ a altor opera]ii. Un exemplu de interblocare este interdic]ia efectu\rii opera]iei de extrac]ie a piesei din dispozitivul ma[inii-unelte `nainte de apari]ia semnalului de `ncheiere a opera]iei de prelucrare programate [i de eliberare a piesei de for]a de fixare;
- realizarea leg\turilor logice corespunz\toare con]inutului programelor; - emiterea comenzilor necesare sistemului de ac]ionare.
Dispozitivele de comand\ ale sistemelor de comand\ cu program rigid con]in: relee de timp, programatoare secven]iale, contactori, blocuri cu semiconductori, mecanisme sau elemente pneumatice [i, mai rar, hidraulice, combinate dup\ scheme exterm de variate [i principial cunoscute de la comanda ma[inilor-unelte. Dispozitivele de comad\ ale sistemelor de comand\ cu program flexibil au `n componen]a lor microprocesoare, calculatoare electronice sau calculatoare de proces. 5.2.3 Dispozitivele de memorare Au scopul de a re]ine (memora) datele din program, respectiv unele subprograme (rutine) aferente. Dispozitivele de memorare pot fi: • mecanice: tamburi cu [tifturi, came plane sau spa]iale, tamburi cu came amovibile sau reglabile, mecanisme cu clichet, benzi [i cartele perforate etc., cunoscute; • electronice: acestea stocheaz\ informa]ii sub form\ numeric\; informa]iile m\surate analog se transform\ `n valori numerice cu dispozitive adecvate de conversie analog numeric\. Dispozitivele de memorare electronice pot fi realizate pe baz\ de ferite (RAM) sau pe baz\ de semiconductori. Spre deosebire de memoriile pe baz\ de semiconductori, memoriile pe baz\ de ferite nu sunt [terse `n cazul dispari]iei sursei principale de alimentare. Memoriile cu semoconductori (ROM) permit modificarea datelor memorate. Pentru memorarea unei cantit\]i mai mari de informa]ii, se folosesc benzi magnetice sau dispozitive de tip “Floppy-disk” (respectiv dischete). • fluidice: pneumatice, hidraulice. Se utilizeaz\ doar `n cazul sistemelor de comand\ fluidice, dep\[ite, sau rar folosite `n robotica industrial\. Pentru memorare pneumatic\ se folosesc dispozitive de tip “flip-flop”.

Robotic\ 173 5.2.4. Interpolatoarele Sunt dispozitive auxiliare având func]ia de a calcula valorile intermediare unor puncte date prin program ale coordonatelor punctului caracteristic, `n cazul utiliz\rii programelor de traiectorie. ~n program se indic\ coordonatele pozi]iilor ini]iale [i finale, iar interpolatorul calculeaz\ coordonatele pozi]iilor intermediare, pe care le comunic\ dispozitivului de comand\. Pentru a realiza interpolarea, se folosesc formule de aproximare a curbei-traiectorie. Astfel, interpolarea se poate face liniar (aproximare cu segmente de dreapt\), `n arc de cerc, `n arc de parabol\, elips\, `n func]ie de forma traiectoriei ce trebuie imprimat\ mi[c\rii punctului caracteristic.
5.2.5. Dispozitivele de comparare Asemenea dispozitive au scopul de a confrunta datele furnizate de traductoare de pozi]ie, deplasare sau vitez\ cu valorile programate, stabilirea diferen]elor [i emiterea comenzilor pentru diminuarea sau anularea diferen]elor. Compararea se realizeaz\ `n mod continuu, iar dispozitivul emite comanda de oprire a ac]ion\rii numai `n momentul `n care diferen]ele sunt nule sau se `ncadreaz\ `ntr-o anumit\ valoare programat\. Datele comparate pot fi numerice sau analogice. Compararea datelor numerice se face prin num\rarea diferen]elor unor impulsuri. Compararea datelor analogice rezult\ prin stabilirea diferen]ei amplitudinilor sau fazelor unor tensiuni (cea corespunz\toare m\rimii programate [i, respectiv, m\rimii reale a unei deplas\ri, viteze etc.). ~n unele situa]ii, dispozitivul de comparare prime[te informa]ii despre starea sistemului de ac]ionare (intensit\]i, debite, presiuni, parametri cinematici etc.) prin intermediul unor aparate de m\sur\ sau/[i senzori. 5.2.6. Blocul de intrare-ie[ire Reprezint\ o interfa]\ (zon\ de leg\tur\) care permite culegerea unor informa]ii despre starea robotului, obiectului [i periferiei (mediului) [i emiterea unor comenzi de corelare c\tre ma[inile [i dispozitivele sau instala]iile periferice. Prin intermediul acestui bloc se realizeaz\, dup\ caz, [i schimbul de informa]ii cu sistemele de comand\ ale altor robo]i, ale unor linii sau ma[ini automate, instala]ii de transport etc. 5.3. Niveluri de comand\ a robo]ilor
Sistemul de comand\ al robo]ilor comport\ patru clase de bucle de reac]ie (fig.5.4) Nivelul inferior al comenzii, denumit [i nivelul ac]ion\rilor

Sistemul de comand\ al robo]ilor industriali 174
corespunde scopului urm\ririi cât mai fidel a unei traiectorii stabilite `n prealabil. Complexitatea stabilirii comenzii la acest nivel vine din aceea c\ structura articulat\ a robotului este reprezentat\ prin ecua]ii diferen]iale neliniare. De asemenea, aceste sisteme de ecua]ii sunt deosebit de complexe dac\ se dore[te s\ se ]in\ seama de frecarea, jocurile din articula]ii [i rigiditatea limitat\ a acestora.
Fig.5.4. Niveluri de comand\ a robo]ilor
complexe dac\ se dore[te s\ se ]in\ seama de frecarea, jocurile din articula]ii [i rigiditatea limitat\ a acestora.
Deasupra nivelului ac]ion\rilor (nivelul 1), care `n mod clasic are dou\ bucle de reac]ie `n pozi]ie [i `n vitez\, se pot g\si `nc\ trei bucle de reac]ie care s\ ]in\ seama de structura geometric\ [i comportarea dinamic\ a robotului (nivelul 2), de informa]iile furnizate de senzorii de zon\ apropiat\ [i de contact (nivelul 3) [i de senzorii de zon\ `ndep\rtat\ (vizuali)- nivelul 4 . ~n afar\ de aceste clase de bucle de reac]ie mai poate fi considerat\ [i bucla de reac]ie `nchis\ prin operatorul care realizeaz\ procesul de `nv\]are a robotului pentru parcurgere unei traiectorii.
Nivelul 3 este dedicat comportamentului denumit reflex sau de adaptare. El are ca scop securitatea robotului prin evitarea [ocurilor [i obstacolelor. Nivelul reflex este realizat cu ajutorul informa]iilor provenite, `n principal, de la senzorii de contact [i de proximitate. Modificarea comenzii prin bucla de reac]ie are ca scop modificarea traiectoriei urm\rite de la nivelul cel mai simplu la cel mai complicat: oprirea robotului `n fa]a obstacolului [i semnalarea acestuia; ocolirea obstacolului dup\ o strategie presatbilit\ sau ocolirea obstacolului dup\ o strategie adaptiv\. Nivelul

Robotic\ 175 superior de comand\ (nivelul 4) preia informa]ii de la senzorii externi globali (vedere artificial\, senzori tactili) [i modific\ strategia de comand\ pe baza unor elemente de inteligen]\ artificial\. ~n aceast\ lucrare ne vom referi, cu preponderen]\, la nivelul 1 [i 2 de comand\ a ac]ion\rii robotului . 5.3.1. Nivelul 1 de comand\. Comanda ac]ion\rilor robo]ilor
Se alege, cel mai adesea, comanda motoarelor de ac]ionare a articula]iilor robotului `n pozi]ie [i `n vitez\. Mai rar, de[i prezint\ o serie de avantaje se utilizeaz\ [i comanda `n cuplu dezvoltat de motoare.
5.3.1.1. Comanda ac]ion\rii robo]ilor cu motoare de curent continuu (MCC)
Pentru simplificare, se consider\ un singur grad de libertate al sistemului de ac]ionare al unei cuple de rota]ie a unui robot, format dintr-un motor electric de curent continuu care dezvolt\ un cuplu motor CM, [i care rote[te bra]ul robotului, caracterizat de masa m, lungimea l, [i momentul de iner]ie J, trebuind s\ `nving\ un cuplu rezistent Cr. La MCC cuplurile depind numai de curen]i `n `nf\[urarea inductoare [i indus\. Dac\ se `nlocuie[te inductorul prin magmen]i permanen]i cuplul este aproximativ propor]ional cu curent indus iar viteza de rota]ie, q& , nu depinde dec^t de tensiunea de alimentarea. MCC are cele mai bune calit\]i din punct de vedere al regl\rii vitezei La reglarea pozi]iei distingem: reglarea continu\ a pozi]iei –caz `n care MCC are calit\]i foarte bune; reglarea incremental\ a pozi]iei – caz `n care exist\ probleme legate de
regimurile de accelerare /decelerare. Motoarele de curent continuu cele mai des utilizate `n robotic\ sunt `n
general cu magne]i permanen]i. ~n principal, este posibil\ func]ionarea acestora la flux inductiv constant, viteza de rota]ie q fiind comod reglat\ prin modificarea tensiunii de alimentare a indusului.
m&
R Le
Cr CM
q (t)m
indus
ut
i(t)
ulx=ct.
J
Fig.5.5. Motor de curent continuu comandat pe
indus

Sistemul de comand\ al robo]ilor industriali 176
Schema de principiu a unui MCC comandat pe indus, care antreneaz\ o sarcin\ ce se opune cu un cuplul rezistent Cr este prezentat\ `n figura 5.5.
Func]ionarea motorului este reglat\ (guvernat\) de 4 ecua]ii: ecua]ia electric\
edt
)t(diL)t(iR)t(u ++⋅= (5.1)
unde: u(t)-tensiunea aplicat\ indusului; R,L-rezisten]a [i inductan]a indusului; i(t)-curentul prin indus; e-tensiunea electromotoare
ecua]iile de cuplaj electromecanice ( )tiKC MM ⋅= (5.2)
( )tqKe E &⋅= (5.3) unde: CM-cuplul motor dezvoltat; KM- constanta electromagnetic\; KE-constanta electromagnetic\; q -viteza indusului (& v de rota]ie a motorului)
ecua]ia mecanic\ ( ) rfM CCtqJC ++⋅= && (5.4)
( ) GqhsigCC mrf −=+ &
unde: J-momentul de iner]ie redus la arbole motor; -cuplu de frecare v^scoas\ determinat de coeficientul de frecare viscoas\ f; C
( )tqf &&⋅
f -cuplul de frecare uscat\ care este `ntr-o prim\ aproxiere constant `n valoare absolut\ [i de sens contrar vitezei de rota]ie & , (determinat de coeficientul de
frecare uscat\ h h ; G –cuplu gravita]ional determinat de greutatea corpului antrenat; Cr- cuplul rezistent
mq&))q( sig m
&
Acest ansamblu de ecua]ii nu ia `n considerare c\derea de tensiune Up, de pe periile motorului care este, `ntr-o prim\ aproximare, constant\ [i egal\ cu 2÷3% din tensiunea de alimentare a motorului Aplicând transformate Laplace [i condi]ii ini]iale nule, ecua]iile (5.1÷5.4) devin:
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
++⋅+=⋅
⋅++=
6.5
5.5
sCsCsqfJssIK
sqKsILRsU
rfmM
mES
&
&
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )
++⋅+⋅⋅=⋅
⋅+⋅⋅+⋅=sCsCsqfsqSJsIK
sqKsISLsIRsU
frmmM
mE
&&
&
Ecua]iile (5.5) [i (5.6) conduc la schema bloc de comanda `n tensiune din figura 5.6 (`ncadrat\ cu liniei `ntrerupt\)
Se remarc\ existen]a unei reac]ii negative naturale prin coeficientul KE. Dac\ se consider\ ca m\rime de ie[ire a motorului pozi]ia unghiular\ Θ

Robotic\ 177 intervine blocul cu func]ia de transfer 1/s. Sunt figurate, deasemenea, blocurile necesare unui servomecanism de pozi]ionare, cu schema general\ prezentat\ `n figura 5.7, [i anume: traductor de pozi]ie, traductorul de vitez\ , traductorul de curent (Tr I), regulatorul de curent (Reg I), dispozitivul de alimentare (Alim).
Reg I Alimentare 1R+LS
KM1
js+f1s
m
KE
Vitez\
Poz. Bucl\ pozi]ie
Bucl\
U(s)I(s)
Tr I
Cf+Cr
q+ ++-
-
-
CM
Limitator q
Fig. 5.6. Schema bloc de comand\ `n tensiune a MCC
Func]ia de transfer este de ordinul 2. Dar, `n practic\, inductan]a acestor motoare este mic\ [i se poate neglija constanta de timp electromagnetic\ egal\ cu fa]\ de costanta de timp electromecanic\.
v/q m&
TE R/L=
Elaboraresemnal de comand\
Amplificatoarede putere
TahometruTraductor de pozi]ie
Vitez\Vitez\
Pozi]ie
Curent
Fig.5 7. Servomecanism de pozi]ionare cu motor de curent continuu
JKK
RTME
M ⋅⋅
=
Din rela]ia (5.6) se deduce ( ) ( )MK
qfJSSI&+
= [i introducând `n rela]ia
(5.5), se ob]ine

Sistemul de comand\ al robo]ilor industriali 178
( ) ( ) qKqK
fJSLSRS EM
&& ⋅++
+=U
( ) ( ) ( ) ( )( ) ME
M
M
q KKfJSLSRK
KfJSLSR
1sU
qsY++++
=+
+==
&&
Pentru cea mai mare parte a motoarelor de curent continuu utilizate `n robotic\ se poate considera:
JKK
RTRLT
MEME ⋅
⋅=<<=
[i se poate scrie cu suficicent\ precizie:
( ) ( )( )ST1ST11AsY
ME0q ++
=&
Schema bloc a buclei de curent pentru Cr=0 sau constant [i frecven]\ suficient de mic este:
Reg IYRI
0
(1+T S) (1+T S)EM
A
+
+ -I
Yq(s)
Pentru alegerea corespunz\toare a regulatorului, produsul se poate aduce la forma dat\ de rela]ia:
( ) ( )ST1
BSYSYM
qRI ⋅+=⋅ &
~n aceste condi]ii, pentru bucla de curent, schema bloc este
unde: YRV(s) – func]ia de transfer a regulatorului de vitez\ ; q - valoarea prescris\ vitezei
0&
Y (s)RV
B1+T SM
KMJS
1m
Viteza
Bucl\ curent
Bucl\ de vitez\
qq ++_
_0 I
~n principiu domeniu de fuc]ionare al MCC nu este limitat. Limit\rile sunt determinate de fenomenele auxiliare cum ar fi :demagnetizarea magne[ilor permanen]i; `nc\lzirea motorului; comuta]ia; restric]ii mecanice.

Robotic\ 179
Dintre acestea problemele legate de `nc\lzire sunt cele mai restrictive. MCC pentru robotic\ au restric]ii din punct de vedere al gabaritului [i de aceea este de dorit s\ fie utilizate c^t mai aproape de curbele limit\. ~n figura 5.8 sunt precizate zonele de func]ionare ale unui MCC:
-zona 1 –limitat\ de curba de `nc\lzire `n regim permanent; -zona 2 – nu poate fi atins\ dec^t `n regim intermitent; -zona 3 – utilizabil\ numai `n regim de accelerare-decelerare. Constructorul de motoare furnizez\
aceste curbe `n cataloagele de alegere [i utilizare ale motoarelor. Ca m\rimi nominale se definesc Un; ; Cnq& n; In; Pn. Punctul de func]ionare se situeaz\ la limita zonei 1 sau `n interiorul ei. Cel mai frecvent, acest punct corespunde unei valori maxime a puterii
2
1
3
Limit\termic\(Lt)`n regimpermanent
Lt motorventilat
Limit\ de comuta]ie
Cuplu maxim
Vitez\ maxim\
C
q
Fig.5.8. Zonele de func]ionare ale MCC
P nq&⋅= nn CPuterea tranzitorie Pt, reprezint\ rata de cre[tere maxim\ a puterii
mecanice [i se calculeaz\ cu rela]ia: P )t(qCmaxt
&⋅=Dac\ se neglijeaz\ cuplurile de frecare date de:
J
C)t(q)t(qJ max
max =⇒⋅= &&C
J
C maxt
2
=P
[i av^nd `n vedere constanta electromagnetic\ se ajunge la rela]ia final\ de calcul a puterii tranzitorii:
( )
Mt
MME
mmax
MEM
TRI
P
RTKK
J
tIKC
JKK
RT
2
=
⋅⋅=
⋅=
⋅⋅
=

Sistemul de comand\ al robo]ilor industriali 180
Reprezentarea domeniilor de ac]ionare cu motoare de curent continuu `n planul puterii tranzitorii Rt –energie cinetic\ Wc.
Produsul Pt Wc se poate calcula cu rela]ia: 2maxct CWP =⋅
atunci c^nd:
TqJ
CWP max
C
t 122
2
=⋅
=&
unde T este timpul de lansare sub cuplul maxim Cmax pentru a atinge viteza
. Cu aceast\ ultim\ rela]ie se poate trasa, `n coordonate logaritmice graficul P
q&
t=f(Wc) (fig.5.9) Din analiza acesteia se observ\ c\ action\rile
electrice cu motoare de curent continuu sunt foarte performante pentru puteri mici [i sunt `nlocuite treptat, pe m\sura cre[terii puterilor , prin ac]ion\ri hidraulice.
Pt
Wc
1Kw
100w
10w
10Kw
1ms
10ms
10s
Motoare hidraulice
Motoare cu rotor disc
Fig.5.9. Dependen]a Pt- Wc pentru MCC
5.3.1.2. Comanda ac]ion\rii robo]ilor cu motoare hidraulice(MH) Schema principal\ a unui element de execu]ie de tip motor hidraulic
cu mi[care de rota]ie este prezentat `n figura 5.10. Se noteaz\ cu: Dp – c\derea de presiune motoare , `n sarcin\ (la mersul `n gol Dp=0) qsc-coefientul de pierderi de debit qscDp- debitul pierdut prin sc\p\ri qm-debitul specific[cm3/rot] sau cm3/rad] V- volumul cunductei de alimentare [cm3]
dtd
qϕ
=& - viteza unghiular\ de
rota]ie; J –momentul de iner]ie la nivelul arborelui motorului
Dp
CM
f
qsc
Q
Q
m2
m1
Cr
J
Fig.5.10. Ac]ionarea cu motor
hidraulic rotativ
CM-cuplu motor ; f- coeficientul de frecare v^scoas\ ; -cuplul de frecare
v^scoas\; C( )f tq&
r – cuplu rezistent; B – coeficientul de compresibilitate al fluidului hidraulic Cu aceste nota]ii, func]ionarea MH rotativ este guvernat\ de 4 ecua]ii:
ecua]ia hidraulic\(de debite)

Robotic\ 181
( )434214342143421
&
ct)p pentru 0(litatacompresibi debite
p
pierderide edebit
psc
volumetricdebit
mm dt
d
BV
q
Q
tqqQ
V
==
∆⋅+∆⋅+⋅=
2 (5.7)
ecua]iile de cuplaj hidro-mecanice
( ) ( )5.9 (5.8) CM
tqqQq
mV
pm
&⋅=
∆⋅=
ecua]ia mecanicii
( ) ( ) ( )( ) GtqhC
CCtqftqJC
r
M
rfM
−=+=
+++=
)(sinCM5.10
f &
48476&&&
unde: h-coeficientul de frecare uscat\ [i G- cuplu gravita]ional. ecua]ia caracteristicii statice
( ) MKqtq 00 −= &&
unde: - tura]ia la mersul `n gol 0q&
20m
sc
K = -rigiditatea static\ a motorului
Din rela]iile (5.8) [i (5.10) rezult\:
αq =0sc
q = 0sc
M
ωm
( ) ( )mmm
p qM
tqqf
tqqJ
+⋅+⋅=∆ &&& (5.11)
( )( ) ( )tq
qf
tqqJ
dt
d
mm
p &&&&& ⋅+⋅=∆
(5.12)
Introduc^nd expresiile (5.11) [i (5.12) `n rela]ia (5.7) se ob]ine:
( ) ( ) ( ) ( ) ( )
⋅+⋅⋅+
+⋅+⋅+⋅= tq
qf
tqqJ
BV
qM
tqqf
tqqJ
qtqqQmmmmm
scmm&&&&&&&&&
2 (5.13)
Dac\ se consider\ M=0, `n transformata Laplace se ob]ine:
( ) ( ) ( )
⋅
+
⋅+⋅
+
⋅+⋅⋅= sqq
qfq
ssqBqfV
qJq
sqsBqVJ
s)s(Q mm
sc
mm
sc
mm 22
2 (5.14)
Func]ia de transfer a sistemului va fi:

Sistemul de comand\ al robo]ilor industriali 182
( ) ( )( )
+
⋅+⋅
+
⋅+⋅
==
mm
sc
mm
sc
m
m qq
fqs
BqfV
qJq
sBqVJ
SsQ
sqsY
22
1
21
Ecua]iile (5.7)÷(5.10) conduce la o schem\ bloc de comand\ de forma:
1
q + sV2Bsc
qm
∆ps1
J + f1s
q(t)CM
M=0
q
q sm
++
_
Schema de comand\ `n debit a MH rotativ
Func]ia de transfer mQ
qeste de ordinul 2 dar este posibil de a o
reduce, f\c^nd o aproximare, la o func]ie de ordinul 1. Interfa]a cu sistemul de comand\, care furnizeaz\ debitul Q este compus\ dintr-un amplificator tensiune-curent [i o servovalv\ comandat\ `n debit a c\rei func]ie de transfer nu poate fi asimilat\ unei amplific\ri pure dec^t dac\ presiunea ∆p este mic\ `n raport cu presiunea de alimentare. Dac\ nu, amplificarea va fi o func]ie neliniar\ `n ∆p. Mai mult, o servovalv\ introduce `ntotdeauna fenomene de prag de sensibilitate [i histerezis care vor influen]a precizia de comand\. Schema func]ional\ a unui MH comandat `n presiune este prezentat\ `n figura 5.11.
qm∆p
s1
J + f1s
q(t)CM
M=0
q+
Fig.5.11 Schema de comand\ `n presiune a
MH rotativ
Func]ia de transfer p
q∆
se poate scrie

Robotic\ 183
)T(p
Kq
p
p
p ∆
∆
+=
∆ 1
unde fJ
T ; f
qp
mp =∆∆K =
Interfa]a cu sistemul de comand\, care va comanda presiunea diferen]ial\ ∆p, este compus\ dintr-un amplificator tensiune-curent [i dintr-o servovalv\ comandat\ `n presiune. Servovalvele posed\ o caracteristic\ liniar\ curent-presiune numai pentru debitele iar amplificarea `n presiune variaz\ cu volumul de lucru [i necesit\ o construc]ie special\ ceea ce a dus la o utilizare mai redus\.
Puterea de accelerare a unei ac]ion\ri este dat\ de rela]ia:
mopt
maxmax JN
Ca
⋅⋅=
2
unde: Cm – cuplul mecanic dezvoltat de sistemul de ac]ionare Jm – momentul de iner]ie al p\r]ilor mobile Nopt—raportul de reducere optim al reductorului dintre sarcin\ [i ac]ionare
mcopt J/J=N
unde: Jc—este momentul de iner]ie al sarcinii Pentru ac]ion\rile hidraulice este se dezvolt\ un cuplu Cm, raportat la vitez\, lente, raportul Nopt poate fi ≈1 [i Jm este sc\zut. Deci, ac]ion\rile hidraulice sunt bine adaptate cerin]elor robo]ilor unde se cer acceler\ri importante. La ac]ion\rile electrice care func]ioneaz\, `n general, la viteze ridicate [i furnizeaz\ Cm sc\zute, este necesar\ utilizarea unor rapoarte mari pentru Nopt . ~n schimb, puterea de accelerare pentru aceste ac]ion\ri este limitat\.
5.3.2. Nivelul 2 de comand\. Utilizarea modelelor `n comanda robo]ilor

Sistemul de comand\ al robo]ilor industriali 184
M\rimi utilizate `n comanda robo]ilor. Consider\m robotul schematizat `n figura 5.12 cu 6 grade de libertate. Cele 6 articula]ii sunt antrenate de 6
motoare prin intermediul unor transmisii (mecanice, hidraulice, etc.) Dac\ consider\m c\ cele 6 ac]ion\ri sunt motoare electrice sau hidraulice, atunci acestea vor fi comandate prin 6 tensiuni (sau curen]i) de comand\ sau, `n cazul unor motoare hidraulice, vom avea 6 debite (presiuni) de comand\. Pentru a genera o mi[care dorit\ a robotului va trebui s\ consider\m urm\torii vectori:
Fig.5.12. M\rimi [i spa]ii utilizate `n comanda robo]ilor
1) Vectorul de comand\, )(tV ,care variaz\ `n timp, [i care are drept componente 6 valori de tensiune (curent) sau debit (presiune). Acest vector apar]ine spa]iului de comand\ :
[ ]TtVtVtVtVtVtVtV )(),(),(),(),(),()( 654321= (5.14)
2) Vectorul cuplurilor motoare, )(tΓ , care are drept componente momentele de torsiune la arborii motoareleor de ac]ionare `nainte de transmisiile mecanice. Acest vector apar]ine spa]iului cuplurilor motoare:
[ ]Tttttttt )(),(),(),(),(),()( 654321 ΓΓΓΓΓΓ=Γ (5.15)
3) Vectorul cuplurilor din articula]ii, )(tC , C este dat de valoarea
momentului de torsiune care se exercit\ `n articula]ia 1.
)(1 t
)(tC apar]ine spa]iului cuplurilor din articula]ii:
[ ]TtCtCtCtCtCtCt )(),(),(),(),(),()( 111111=C (5.16)
4) Vectorul variabilelor generalizate, )(tq , este dat\ de valoarea unui unghi de rota]ie, dac\ articula]ia este rotoid\, sau reprezint\ o deplasare dac\ articula]ia este de transla]ie:
)(1 tq
[ ]Ttqtqtqtqtqtqtq )(),(),(),(),(),()( 654321= (5.17)

Robotic\ 185
5) Vectorul variabilelor opera]ionale, )(tz , care are drept componente pozi]ia [i orientarea reperului final, ata[at organului terminal, `n raport cu un reper de referin]\, R0 :
[ ]Ttotototptptptz )(),(),(),(),(),()( 321321= (5.18) ~n concluzie, pentru a comanda mi[carea unui robot va trebui s\ g\sim rela]iile de trecere, denumite modele, de la un vector la altul, `n ambele sensuri, din cele enumerate mai sus.
Sensul de parcurgere:
)()()()()( tztqtCtt ⇒⇒⇒Γ⇒V (5.19) corespunde sensului direct de execu]ie a unei mi[c\ri pe o traiectorie a organului terminal (OT) al robotului. Rela]iile determinate `n acest caz, dintre cele 5 categorii de vectori, sunt denumite modele directe. Sensul:
)()()()()( tztqtCtt ⇐⇐⇐Γ⇐V (5.20) corespunde sensului invers de descriere a sarcinii de `ndeplinit de c\tre robot, plecând de la descrierea traiectoriei [i ajungând la determinarea m\rimilor de comand\ a motoarelor (tensiuni sau curen]i, debite sau presiuni). Rela]iile determinate `n acest caz, dintre cele 5 categorii de vectori, sunt folosite efectiv pentru comanda robotului [i sunt denumite modele inverse.

Sistemul de comand\ al robo]ilor industriali 186
~n figura 5.13. se prezint\ diferitele niveluri de comand\ [i modelele necesare pentru acestea `n leg\tur\ cu rela]iile dintre cele 5 categorii de
vectori. ~n partea dreapt\ a figurii se reg\se[te modelul simplificat al func]ion\rii robotului. Dac\ robotul este foarte evoluat (din geneara]ia a-III-a) vom putea tasta o comand\ de genul: “asambleaz\ piesele reductorului”. ~n acest caz, presupunem c\ robotul are definit un model strategic, pe care `l poate urma pentru a executa sarcina dat\, un model al obiectelor pe care trebuie s\ le asambleze [i informa]ii suficiente asupra mediului unde va plasa aceste obiecte. Acest model strategic este denumit generator de planuri de ac]iune. La ie[irea din acest model trabuie s\ furniz\m traiectoriile pe care robotul trebuie s\ le parcurg\ care sunt definite de
vectorul )(tz . Trecerea de la descrierea sarcinii globale de `ndeplinit la
Fig.5.13. Niveluri [i modele de comand\ [i programare a robo]ilor

Robotic\ 187
precizarea automat\ l a traiectoriilor )(tz este o sarcin\ dificil\ pe care pu]ini robo]i [i limbaje de programare a acestora o pot rezolva. Pentru majoritatea robo]ilor industriali, sarcina este descris\ de
traiectoriile )(tz furnizate prin diferite procedee vare vor fi descrise in capitolul 6. Aceste traiectorii ale organului terminal (OT) al robotului sunt constituite din puncte [i direc]ii care sunt cunoscute `n spa]iul sarcinii de `ndeplinit. Trebuie s\ traducem aceste traiectorii `n traiectorii de evolu]ie a fiec\rei articula]ii a robotului. Pentru a stabili aceast\ coresponden]\ avem nevoie de un model care este denumit model geometric, dac\ este realizat
`ntre vectorii )(tz [i )(tq sau model cinematic dac\ ne intereseaz\ coresponden]a `ntre micile modific\ri ale pozi]iei [i orient\rii OT
],,,,,[ 321 ooozyxz ∆∆∆∆∆∆=∆ [i micile modific\ri corespunz\toare la
nivelul coordonatelor generalizate ]...,[ 21 nqqqq ∆∆∆=∆ . Aceste modele au ca ipotez\ rigiditatea suficient\ a corpurilor [i articula]iilor robotului care nu se deformeaz\ sub ac]iunea for]elor dezvoltate `n timpul mi[c\rii. Dac\ cunoa[tem evolu]ia `n timp a vectorului coordonatelor
generalizate putem s\ calcul\m eforturile (for]ele [i cuplurile) )(tC care trebuie dezvoltate `n articula]ii, ceea ce impune cunoa[terea modelului dinamic al robotului. Pe baza acestuia putem calcula cuplurile motoare
)(tΓ necesare la ie[irea motoarelor, având nevoie de modelul transmisiilor. ~n final, pe baza modelului de comand\ a ac]ion\rilor vom putea s\ calcul\m evolu]ia tensiunilor (curen]ilor ) sau debitelor (presiunilor) de alimentare a motoarelor. Dac\ toate aceste calcule, pe baza modelelor, sunt terminate suntem `n posesia programului de comand\ a robotului pentru execu]ia sarcinii dorite. 5.4. Modele utilizate `n comanda robo]ilor 5.4.1. Modelul geometric pentru comanda robo]ilor
Cinematica unui robot este definit\ ca fiind studiul mi[c\rii acestuia `n spatiul tridimensional, func]ie de timp, f\r\ a ]ine seama de for]ele / momentele care produc miscarea. ~n acest sens apar dou\ probleme cinematice importante:
-problema cimematic\ direct\: care const\ `n determinarea pozi]iei [i orient\rii fa]\ de un reper de referin]\ ( ansamblul acestor dou\ caracteristici poarta denumirea de atitudine cinematic\ sau configura]ie pentru organul terminal (efectorul) robotului la un anumit moment de timp), atunci când sunt cunoscute atitudinile cinematice relative ale tuturor

Sistemul de comand\ al robo]ilor industriali 188
segmentelor din lan]ul cinematic respectiv care compun robotul, la momentul respectiv de timp.
-problema cinematic\ invers\: presupune determinarea atitudinii cinematice relative pentru segmentele succesive ale robotului la un anumit moment de timp, atunci cand este cunoscuta atitudinea cinematic\ a efectorului fa]\ de un reper de referin]\ la acel moment de timp.
Atât `n problema cinematic\ direct\ cât [i `n cea indirect\, apare necesitatea determin\rii atitudinilor cinematice a diferitelor corpuri fa]\ de un reper triortogonal fixat. Acest reper este sta]ionar [i il vom considera fixat la baza robotului (batiul acestuia). Atitudinea cinematic\, `n spa]iul tridimensional al unui corp oarecare fa]\ de un reper triortogonal fixat, poate fi precizat\ prin intermediul a 6 parametri: 3 reprezentând pozi]ia [i 3 reprezentând orientarea. Ansamblul acestor 6 parametri poart\ denumirea de vector al parametrilor de pozitionare, atunci când se refer\ la un segment oarecare al robotului [i respectiv vectorul coordonatelor operationale atunci cand se refera la organul terminal (OT) al robotului. Pe de alta parte, tinând seama de faptul c\ articula]iile cele mai frecvent intâlnite `n practic\ sunt cele realizate prin cuple cinematice de clas\ V rezult\ c\ modificarea atitudinii cinematice relative a doua segmente vecine, legate printr-o asemenea articulatie, poate fi precizata printr-un singur parametru, ceilal]i 5 parametri, pentru exprimarea pozi]iei [i a orient\rii fiind constanti in timp in cazul unei asemenea legaturi.
Pentru un robot având n grade de mobilitate (gdm) `n modelare vom face presupunerea simplificatoare c\ fiecare articula]ie con]ine câte o cupl\ cinematic\ de clas\ V (fie de tranzla]ie, sau de rotatie) [i deci robotul are n articulatii [i n+1 segmente, primul segment fiind cel fix (baza sau batiul). In practic\, se pot `ntâlni [i cazuri de articula]ii de clas\ mai mic\, dar care vor putea fi reduse la cazul unui sir de articula]ii con]inând numai cuple de clas\ V. Rezult\ din aceste preciz\ri c\ pentru un robot cu n gdm., atitudinea cinematic\ relativ\ a celor n+1 segmente ale sale poate fi precizat\ `n timp prin intermediul unui vector cu n componente (câte o component\ pentru fiecare dou\ segmente vecine care sunt legate printr-o cupla de clasa V) pe care il vom numi vectorul coordonatelor generalizate. Astfel, coordonatele generalizate in robotic\ au in]elesul cunoscut din mecanic\: adic\ formeaz\ un set de m\rimi independente intre ele, in num\r egal cu numarul gdm. al sistemului [i care pot determina in mod complet [i univoc pozi]ia sistemului de miscare.
Metoda cea mai folosit\ pentru determinarea modelului geometric al unui robot [i deci pentru rezolvarea celor dou\ probleme cinematice enun]ate mai sus este aceea bazat\ pe formalismul Denavit-Hartenberg, formalism care utilizeaz\ reprezentarea omogen\ a obiectelor [i transformarile omogene, elemente ce sunt prezentate in Anexa 1.

Robotic\ 189 5.4.1.1 Determinarea modelului geometric direct.
Modelul geometic direct este acela prin care se afl\ atitudinea cinematic\ a organului terminal (OT) fa]\ de un reper de referin]\, la un anumit moment de timp, atunci când sunt cunoscute atitudinile cinematice relative ale segmentelor robotului., la acel moment de timp. Pentru un robot cu n gdm. modelul geometric direct va fi dat de un operator de forma :
fd : D R≤ n + D' R≤ 6 ; ))(()( tqftz d= (5.21)
unde am notat cu )(tz vectorul coordonatelor operationale, )(tq este vectorul coordonatelor generalizate, D este domeniul de defini]ie pentru operatorul fd , care depinde de restric]iile impuse deplas\rilor articulatiilor, de luat in considera]ie func]ie de robotul care se modeleaza, iar D' este spatiul de operare, adic\ multimea punctelor care pot fi atinse de efectorul robotului, cu orientarile precizate prin valorile celor trei parametri unghiulari care intr\ `n compunerea vectorului z. Pe baza elementelor deduse anterior, va putea fi precizat un algoritm prin care sa se determine vectorul z pentru un vector q cunoscut, adic\ s\ se determine modelul geometric direct. Consider\m ata[ate de toate segmentele robotului. repere Denavit-Hartenberg, reperul O0 x 0 y0 z 0 ,fiind reperul de referin]\. Conform algoritmului Denavit-Hartenberg se vor putea determina cele n matrice Denavit-Hartenberg (D-H) , Ai
i-1. Fiecare din aceste matrice ne permite s\ determin\m vectorul de pozitie, `n coordonate omogene, pentru un punct oarecare fat\ de reperul i-1, atunci când este cunoscut vectorul de pozi]ie al punctului respectiv fa]\ de reperul i , dup\ rela]ia :
iiii rAr ⋅= −− 11 (5.22)
Fig.5.14. Determinarea modelului
geometric direct

Sistemul de comand\ al robo]ilor industriali 190
Aplicând rela]ia amintit\ `n mod iterativ ob]inem vectorul de pozitie r0 al unui punct oarecare fa]\ de reperul de referin]\, atunci când este cunoscut vectorul de pozitie al punctului respectiv fa]\ de reperul atasat efectorului (segmentul n al robotului ), vector pe care `l notam cu rn (fig.5.14) :
r0 = ... r01A 1
2A nnA −1 n (5.23 )
~n rela]ia de mai sus apar n matrice D-H, care sunt matrice de transformare omogen\ [i prin produsul acestora se ob]ine tot o matrice de transformare omogena, rezultând relatia :
r0 = r0nA n ( 5.24)
Deci, matricea dat\ de :
= ... (5.25) 0nA 0
1A 12A n
nA −1
este matricea de transformare omogen\ care exprim\ pozi]ia [i orientarea reperului 0n Xn Yn Zn , fa]\ de reperul 00 X0 Y0 Z0 , adic\ atitudinea
cinematic\ a efectorului fat\ de reperul de referint\. Matricea depinde
de cei patru parametri D-H, dintre care unul este parametrul variabil la miscarea articulatiei i, acest parametru intrând `n componen]a vectorului coordonatelor gneralizate. Rela]ia anterioar\ se scrie, tinand seama de parametrii variabili care apar, sub forma :
iA −1i
0nA (q1 , q2 , ...qn ) = (q0
1A 1 ) (q12A 2 ) ... (qn
nA −1 n ) , (5.26)
si deci matricea An0 (q1 , q2 , ...qn ) = (q0
1A 1 ) (q12A 2 ) ... (qn
nA −1 n ), depinde
de vectorul coordonatelor generalizate, care este valabil in timp.
Explicitând forma acestei matrice, :
A
n s a pn s a pn s a p
n s a pn
x x x x
y y y y
z z z z0
0 0 0 10 0 0 1
=
=
(5.27)

Robotic\ 191
rezult\ felul in care se poate extrage vectorul z
0n
al coordonatelor
opera]ionale pe baza elementelor din matricea . Astfel, `n ultima
coloan\ a matricei avem, pe primele trei pozitii (p
A0An
n
n
x , py , pz ),
coordonatele originii 0n in reperul de referin]\ 00 X0 Y0 Z0, adic\ pozi]ia efectorului fa]\ de reperul de referin]\ (Fig.5.14). Orientarea efectorului fa]\ de reperul de referin]\ este exprimat\ implicit prin elementele submatricei
de rota]ie din matricea . ~n adev\r, `n primele trei coloane din
matricea avem proiec]iile versorilor axelor reperului 0
0A0A n Xn Yn Zn fa]\ de
axele reperului 00 X0 Y0 Z0 . In acest sens, se noteaz\ de obicei acesti trei versori prin :
• n versorul axei Xn , notat a[a deoarece reprezint\ direc]ia normal\ la planul apucatorului, acesta fiind cel mai frecvent tip de efector.
• s ( din englez\, "slide" - alunecare ) versorul axei Yn , el reprezentand direc]ia de `nchidere / deschidere a apucatorului.
• a versorul axei Zn , notat a[a deoarece reprezint\ direc]ia dup\ care apucatorul se aproprie de obiectul ce urmeaza afi manipulat.
Conform relatiilor specifice la transform\rile omogene, aceast\ variant\ de precizare a orient\rii este redundant\, intre elementele submatricei de rota]ie dintr-o matrice de transformare omogen\ având loc mai multe rela]ii de dependen]\. De aceea, se poate construi vectorul coordonatelor operationale :
z = (px py pz 01 02 03 )T (5.28)
`n care primele trei componente exprim\ pozi]ia efectorului fa]\ de reperul de baz\, iar ultimele trei, sunt trei parametri unghiulari, suficien]i pentru a exprima orientarea efectorului fa]\ de reperul de baza. Daca primele
componete, de pozitionare, din vectorul z rezult\ direct din matricea ,
pentru a afla parametrii de orientare trebuie facute calculele corespunzatoare.
0An
Astfel, mai intâi trebuie stabilit tipul celor trei parametri prin care se exprima orientarea. Daca acestia se aleg ca fiind unghiurile lui Euler, atunci se va egala submatricea de rotatie din matricea transformarii Euler, cu

Sistemul de comand\ al robo]ilor industriali 192
submatricea de rotatie din matricea [i din cele 9 ecua]ii astfel formate (
care nu sunt independente ) se pot afla valorile unghiurilor lui Euler θ, Ψ, ϕ
, in func]ie de elementele din submatricea de rota]ie a matricei ( θ = f
0An
n
n
0A 1 =
( nx , ny , nz , sx , ax , ay , az ) , Ψ = ( nx , ny , nz , sx , ax , ay , az ) , ϕ = ( nx , ny , nz , sx , ax , ay , az ).
In mod similar, daca se dore[te exprimarea orient\rii prin unghiurile Roll, Pitch si Yaw, se va egala expresia submatricei de rota]ie din matricea
transform\rii omogene corespunzatoare, cu submatricea de rotatie din ,
[i pe baza ecua]iilor formate se vor putea determina valorile r, p [i y, care se
vor folosi drept parametri 0
0A
1 , 02 si 03 in vectorul z . Putem astfel concluziona asupra felului in care se determina modelul geometric direct :
• Se ata[eaz\ repere compatibile cu transformarile D-H segmentelor
robotului, se afl\ parametrii D-H [i respectiv matricile D-H , dup\
algoritmul transformarii D-H ; iA −1i
• Se afl\ matricea , conform relatiei (5.25) ; 0nA
• Se calculeaz\, pe baza matricei , componentele vectorului 0nA z al
coordonatelor opera]ionale, conform celor ar\tate anterior.
5.4.1.2. Determinarea modelului geometric invers (pentru comand\) Analitic, modelul geometric invers este exprimat prin:
fi : D' ≤ R6 → )(tq = fi ( z ) (5.29)
care permite determinarea vectorului coordonatelor generalizate, la un anumit moment de timp, atunci când este cunoscut vectorul coordonatelor operationale ( pozi]ia [i orientarea efectorului fa]\ de un reper triortogonal de baz\ ) la acel moment de timp. In majoritatea abord\rilor (excep]ie fac cele geometrice ) pentru a determina modelul geometric invers pentru un robot industrial (RI) este necesar, in prealabil, s\ se g\seasc\ modelul
geometric direct al acestuia. Astfel, presupunem ca matricea este
cunoscut\, elementele sale depinzând, a[a cum s-a ar\tat, de valoarea
vectorului
0An
q (t). In cazul modelului geometric invers, ceea ce se cunoa[te

Robotic\ 193
este pozi]ia efectorului R.I. fa]\ de reperul de referin]\, adic\ vectorul z la
momentul t. Dac\ vectorul z ∈ R6 reprezint\ o exprimare minimal\ a atitudinii cinematice a efectorului R.I., putem presupune c\ aceasta este dat\, fa]\ de reperul de referi]\, [i printr-o matrice de transformare omogen\ E, valabil\ pentru momentul t considerat. Avem deci, dou\ exprimari ale atitudinii cinematice a efectorului fa]\ de reperul de baza :
p
x
y
z
1
- Matricea (0nA q ) ,care reprezint\ atitudinea cinematic\ a efectorului
fa]\ de reperul de baz\, pentru o valoare precizata a lui q .
- Matricea E ,care exprim\, de asemenea, atitudinea cinematic\ a efectorului fa]\ de reperul de baz\, la momentul respectiv de timp [i care este cunoscut\ fiind dat\ pozi]ia [i orientarea OT pe traiectorie.
Egalând cele doua expresii :
(0nA q ) = E ( 5.30)
si a determina modelul geometric invers inseamn\ a afla cele n
componente ale vectorului q din ecua]ia de mai sus.
Matricea E este o matrice de transformare omogen\ [i folosind pentru aceasta forma de mai jos ,
E = =
n s a pn s a pn s a
x x
y y y
z z z
x
0 0 0
n s a p0 0 0 1
( 5.31 )
rezult\ c\ determinarea modelului geometric invers `nseamn\ rezolvarea sistemului de ecuatii dat sub forma matriceal\ prin rela]ia (5.30),in care
necunoscutele sunt cele n componente ale vectorului q .
Conform relatiei (5.30) num\rul ecua]iilor scalare este 12, deoarece pe ultima linie a unei matrice de transformare omogen\, `n modelarea geometric\ avem 4 elemente constante. ~ntre aceste ecua]ii exist\ o serie de dependen]e, corespunz\toare dependen]elor `ntre elementele submatricei de rota]ie dintr-o matrice de transformare omogen\, Astfel, conform semnificatiei elementelor dintr-o matrice de transformare

Sistemul de comand\ al robo]ilor industriali 194
omogen\, pe coloanele submatricei de rota]ie din matricea E ([i
corespunzator `n matricea ) apar componentele versorilor axelor
reperului triortogonal fixat de efector, fa]\ de reperul de baz\, [i deci au loc rela]iile :
0An
nn ss aa n s a= = = =1; * ( 5.32 )
ceea ce `nseamn\ un num\r de 6 rela]ii scalare de dependen]\.
Concluzia este c\ determinarea modelului geometric invers presupune rezolvarea unui sistem de 6 ecuatii independente cu n necunoscute, ce se pot explicita din relatia (5.30).
Urmatoarea observa]ie este aceea c\ aceste 6 ecuatii con]in necunoscutele q1 , ... , qn sub func]iile trigonometrice, astfel c\ avem un sistem de ecua]ii neliniare. De[i, acest sistem prezint\ unele particularit\]i, pân\ `n prezent nu a putut fi formulat\ o metod\ general valabil\ pentru determinarea modelului geometric inversal al unui robot in cazul general, ci numai metode aplicabile de la caz la caz, in functie de R.I. modelat. Aceasta se explica prin forma complicat\ a sistemului ce trebuie rezolvat pentru a avea solu]ia de la modelul geometric invers. Totusi, se poate spune c\ pentru toate tipurile curente de robo]i, problema determin\rii modelului geometric invers este rezolvat\ prin una din metodele ce vor fi precizate in continuare.
Rezolvabilitatea robotului
Deoarece rezolvarea modelului geometric invers presupune rezolvarea unui sistem de ecuatii neliniare, problemele care se pun sunt acelea privind existen]a solutiei, a numarului de solu]ii [i a determin\rii lor.
O notiune legat\ de modelul geometric invers este aceea de robot rezolvabi : un robot este rezolvabil atunci când pentru orice valoare dat\ a
lui z se pot determina toate valorile corespunz\toare ale lui q , conform modelului geometric invers. Rezultatul formulat in acest sens, este urmatorul :
• Toti robo]ii cu mai pu]in de 6 gdm. sunt rezolvabili ;
• Pentru robo]ii cu 6 gdm se [tie c\ sunt rezolvabili aceia care satisfac una din condi]iile : cei care au trei cuple de tranzla]ie ; cei care au trei cuple de rota]ie cu axele de rota]ie concurente ; cei care au o cupl\ de rota]ie [i

Robotic\ 195 una de tranzla]ie cu axele de mi[care coaxiale ; cei care au dou\ perechi de cuple de rota]ie cu axele de mi[care concurente .
Nu s-au formulat asemenea rezultate pentru robo]ii cu mai mult de 6 grade de libertate. Se poate observa ca majoritatea robo]ilor actuali se incadreaz\ `n clasa celor rezolvabili.
In ceea ce priveste num\rul de solu]ii pentru ecua]iile ce formeaz\ modelul geometric invers, pot apare toate cele trei situatii posibile :
1. Modelul geometric invers nu are nici o solutie, atunci când atitudinea cinematic\ fixat\ pentru efector este `n afara spa]iului de operare D'. Spa]iul de operare este o caracteristic\ a fiecarui R.I. fiind determinat de numarul de grade de libertate, de structura lan]ului cinematic, de dimensiunile segmentelor R.I. [i de restric]iile mecanice ale deplasarilor articulatiilor. Atitudinea cinematic\ fixat\ pentru efector se poate situa `n afara spa]iului de operare din punct de vedere al pozi]iei, al orient\rii sau din ambele puncte de vadere. Pentru R.I. cu mai pu]in de 6 gdm., orient\rile pe care le poate atinge efectorul sunt limitate, astfel c\ frecvent
se pune numai problema g\sirii acelei valori a vectorului q pentru care efectorul R.I. atinge o pozitie precizat. ~n cazul general, spa]iul de operare pentru un R.I se poate afla, dup\ determinarea modelului geometric direct,
prin aflarea din matricea a limitelor de varia]ie pentru parametrii de
pozitionare [i respectiv de orientare, atunci cand variabilele q0An
i iau toate valorile admise de limitele de mi[care ale articulatiilor.
2. Modelul geometric invers are o imfinitate de solutii, atunci când R.I. respectiv este redundant `n raport cu sarcina. Aceasta apare atunci când num\rul de grade de mobilitate al R.I. respectiv este mai mare decât num\rul de gradelor de libertate prin care poate fi specificat\ sarcina. In spa]iul tridimensional, pozi]ia [i orientarea unui corp se precizeaz\ prin 6 grade de libertate, specificate `n cazul efectorului R.I. prin cele 6
componente ale vectorului z . Astfel c\, un R.I. avâd mai mult de 6 gdm. va fi un R.I. redundant `n raport cu sarcina . Robo]ii redundan]i sunt utili atunci când se pune problema oper\rii `ntr-o zon\ cu obstacole, deoarece se va putea alege, din mul]imea de configura]ii care determin\ satisfacerea sarcinii, pe accea care s\ determine ocolirea obstacolelor.
3. Modelul geometric invers are un numar finit de solutii, pentru cazul in care nu suntem in una din cele doua situatii precizate mai sus. Aceasta se explic\ prin aceea c\ rezolvarea modelului geometric invers, inseamn\

Sistemul de comand\ al robo]ilor industriali 196
rezolvarea unui sistem de ecua]ii neliniare ( cel mai frecvent ecua]ii trigonometrice), pentru care solu]ia unic\ apare atunci când pozi]ia [i orientarea dorit\ pentru efector, se gasesc pe frontiera spa]iului de operare. Num\rul solu]iilor depinde de structura lan]ului cinematic respectiv, f\r\ a exista o farmul\ general\ care s\ permit\ calculul acestui num\r. Acest num\r va depinde de R.I. studiat [i variaz\ cu num\rul parametrilor D-H care sunt nuli.
Tinand seama de cele prezentate mai sus, de faptul ca determinarea modelului geometric invers inseamna rezolvarea unui sistem de ecuatii neliniare, metodele de rezolvare se pot imparti in doua clase : metode analitice [i metode numerice . De[i metodele numerice pot furniza solu]ii `n cazuri `n care matodele analitice e[ueaz\, ele nu s-au impus `n robotic\ datorit\ urmatoarelor dou\ motive:
1. Fiind metode iterative, sunt mai lente `n compara]ie cu metodele analitice ( in cazul metodelor analitice se dispune de solutii explicite pentru necunoecutele qi [i timpul de g\sire a solu]iei este dat numai de timpul de calcul al expresiilor respective ). De aceea, metodele numerice sunt excluse mai ales `n cazul in care conducerea “on-line” a robotului implic\ un calcul al modelului geometric invers;
2. Metodele numerice furnizeaz\ o solu]ie si nu toate solu]iile pentru o atitudine cinematic\ dorit\ a efectorului, ceea ce nu poate fi acceptabil in majoritatea cazurilor in conducerea R.I.(vezi si capitolul referitor la planificarea traictoriei)
De aceea, in cele ce urmeaz\ ne vom ocupa numai de metodele analitice. Prin aceste metode, se intelege c\ modelul geometric este rezolvat atunci când s-au g\sit expresiile explicite pentru cele n
componente ale vectorului q . Metodele analitice se impart in doua categorii : metode algebrice [i metode geometrice . Deosebirea intre ele este doar una de abordare in construirea sistemului de ecuatii care vor duce la rezolvarea modelului geometric invers.
O metod\ `ncadrat\ `n clasa metodelor algebrice [i care s-a dovedit a fi aplicabil\ pentru majoritatea robo]ilor actuali este metoda separarii necunoscutelor , propusa de Paul R.. Pentru a o explica , rescriem relatia
(5.30) tinand seama de forma matricei , conform celor prezentate la
modelul geometric direct : 0An
E ( 5.33 ) 01
1 12
2 1A A Aq q qnn
n( ) ( )... ( )− =

Robotic\ 197
n
E
2 0 En
E
E
E
q E
Pentru a izola necunoscuta q1 se `nmul]esc la stanga ambii membri ai
ecua]iei de mai sus cu [ (q0A 1) ]-1, ob]inându-se :
( 5.34 ) 12
2 1 01
11A A Aq q qn
nn( )... ( ) [ ( )]−
−=
sau luând `n considera]ie semnifica]ia inversei matricei , relatia devine :
(5.35) )Necunoscuta q
01A
1 2 1 1 1A A Aq q qn n( )... ( ) ( )− =
)]12
21A q −
1 este
astfel izolat\ `n membrul drept al ecuatiei ( 5.35 ) [i va fi determinat\ pe baza a una sau dou\ ecua]ii scalare din cele 12 ecua]ii scalare pe care le furnizeaz\ egalitatea matriciala (5.35). ~n continuare, se procedeaz\ in mod similar pentru a determina pe q2, inmul]ind la stanga ambii membri ai
ecuatiei ( 5.35 ) cu [ ( :
( 5.36 ) 23
3 1 12
21
10
1A A A Aq q q qnn
n( )... ( ) [ ( )] ( )−−=
sau tinand seama de semnificatia inversei matricei : 12A
( 5.37 ) 23
3 1 21
2 10
1A A A Aq q q qnn
n( )... ( ) ( ) ( )− =
In membrul drept al ultimei ecua]ii, singura necunoscut\ este q2, q1 fiind deja determinat\. Din relatia ( 5.37 ) se va putea determina q2, dup\ care se procedeaza in mod similar pentru q3 ,q4 , . . . , qn . Ultima ecua]ie, care se foloseste atât pentru determinarea lui qn-1 cat [i a lui qn are forma :
( 5.38 ) nn
n nn
nA A Aq q q− −
−−=1 1
21 1
01( ) ( ) ... ( )
necunoscuta qn-1 fiind izolat\ in membrul drept al ecua]iei, iar qn `n cel stâng. ~n legatur\ cu aceast\ metod\, se pot face urmatoarele observa]ii : Sa cosideram o situa]ie generic\, a[a cum apare `n procesul separ\rii necunoscutelor :
( 5.39 ) ii
i nn
n iiA A Aq q+
+ −
−=11 1
11( )... ( ) ( )
ecua]ie care este folosit\ pentru determinarea necunoscutei qi . Pentru a facilita determinarea modelului geometric invers prin aceast\ metod\, este util ca `n calculul modelului geometric direct sa se ob]ina ca rezultate intermediare matricele de forma :

Sistemul de comand\ al robo]ilor industriali 198
A
n
n
n −1
( 5.40 ) in
i ii
nnA Aq( )+
+
−=11
1
pentru i = 1,2 ,3, . . . , n-1. Aceasta inseamn\ de fapt, c\ produsul care d\
matricea , care reprezint\ modelul geometric direct, este calculat de la
dreapta la stânga. Astfel, dispunand de matricile (i = 1,2 ,3, . . . , n-1)
de la modelul geometric direct, in calculul modelului geometric invers, formarea ecuatiilor de forma (5.39 ) va implica doar calculul produsului din membrul drept, membrul stâng fiind deja calculat. In calculul membrului drept, al ecuatiilor (5.39) apar inversele matricilor D-H ( calculate la determinarea modelului geometric direct ), iar pentru operatia de inversare se va aplica regula de inversare a matricilor omogene.
0AiA
O variant\ a metodei separ\rii necunoscutelor, care se recomand\ atunci când ultima articula]ie a robotului este de tranzla]ie, incepe izolarea necunoscutelor cu ultima dintre acestea, adica qn . Pentru aceasta se
inmul]esc la dreapta ambii membri ai ecuatiei (5.33) cu [ ] ,
obtinandu-se : nA −1
( 5.41 )01
1 12
2 21
1 11A A A Aq q q E qn
nn n
nn( ) ( )... ( ) [ ( )]−
−− −
−=
Din aceasta se `ncearc\ determinarea lui qn , dupa care se va putea continua procedeul cu izolarea, in ordine, a necunoscutelor qn-1 , . . . , q1 . De asemenea, aceast\ variant\ poate fi incercat\ atunci când o necunoscuta qi nu poate fi determinat\ prin prima variant\ a metodei,
Pentru sistemul de comanda al R.I. se pune [i problema alegerii uneia dintre aceste solu]ii, [i conform acesteia se determin\ comenzile in articulatii ; criteriile de alegere a acestor solu]ii, din mul]imea solu]iilor pe care le are modelul geometric invers, pentru atitudinea cinematic\ respectiv\ a efectorului, vor fi prezentate in capitolul referitor la planificarea traictoriei.
O alt\ metod\ din clasa metodelor algebrice este metoda decuplarii ( cunoscuta si sub numele de metoda lui Piper). Metoda este adecvat\ pentru acei R.I. pentru care modelul geometric invers poate fi decuplat intr-un model geometric invers al pozi]iei plus un model geometric invers al orientarii. Astfel, ea se aplica usor unor R.I. cu 6 gdm.. In mod minimal, atitudinea cinematic\ a efectorului fa]\ de baza R.I. se poate descrie prin
vectorul coordonatelor generalizate z , având 6 componente : 3 pentru descrierea pozi]iei si 3 pentru descrierea orient\rii. Ca principiu, metoda

Robotic\ 199 decupl\rii const\ `n descompunerea sistemului de 6 ecuatii cu cele 6 necunoscute ( q1 , . . . ,q6 ), corespunzator modelului geometric invers al R.I. respectiv, in dou\ subsisteme independente de câte 3 ecuatii : primul subsistem con]ine 3 necunoscute [i este format prin considerarea, din atitudinea cinematic\ precizat\ a efectorului, doar a pozi]iei acestuia, iar al doilea subsistem, con]inând celelalte 3 necunoscute, este format prin cosiderarea orient\rii precizate a efectorului. Autorul metodei D.L.Piper a aratat ca aceasta decuplare are loc dac\ R.I. `ndepline[te una din urmatoarele doua conditii : are 3 articulati de rotatie cu axele de miscare concurente sau are 3 articulatii de tranzlatie ;
Multi R.I. satisfac una din aceste conditii, astfel c\ metoda va putea fi aplicat\. Facând parte din clasa modelelor algebrice, ca [i la metoda separ\rii necunoscutelor, se impun acelea[i observa]ii cu privire la verificarea corectitudinii solutiilor obtinute.
Daca metodele algebrice prezentate mai sus au un caracter de generalitate, in sensul c\ se aplic\ pentru anumite categorii de R.I., abordarea geometric\, in determinarea modelului geometric invers presupune rezolvarea cazului fiecarui R.I. prin descompunerea geometriei spa]iale a lan]ului cinematic respectiv, `ntr-o serie de probleme de geometrie plan\, prin care s\ se determine dependen]ele `ntre atitudinile cinematice ale diferitelor segmente ale R.I. O asemenea abordare are `n schimb avantajul c\ permite identificarea u[oar\ a solu]iilor care satisfac restric]iile de deplasare ale articula]iilor [i de asemenea, alegerea, `n cazul solu]iilor multiple, a acelei solu]ii care s\ satisfac\ cel mai bine criteriul de optim urmarit `n deplasarea R.I. respectiv. • Exemplu de determinare a modelului geometric direct (MGD) [i modelul
geometric invers (MGI) Observa]ii generale:
a)Pozi]ia unui punct al OT este definit\ de coordonatele sale fa]\ de reperul R0 prin:
ttp zyxxxxx ),,()( 321 ==
b)Orientarea reperului Rn este definit\ de matricea Ar fie c\ utiliz\m unghiurile Euler sau r, p, y. Ea este complet determinat\ dac\ sunt defini]i
6 cosinusuri directoare (xx xy xz) ale versorului [i `n raport cu R
)( nxc−→ −−
)( nn zk0.
c) Este inutil s\ specific\m cosinusul vectorului care se pot ob]ine prin produsul vectorial al celorlalte 2.
)( nn jy→−

Sistemul de comand\ al robo]ilor industriali 200
1=nx 1==−−
nkz
0=⋅−−
nn zx )0( =⋅→→
nn kideci xR=(x4, x5, x6, x7, x8, x9)t sau xR
2=(xx, xy, xz, zx, zy, zz)t ~n matricea de trecere omogen\
=
10PR
A cu
=
zz
yy
xx
zxzxzx
R [i
=
z
y
x
P
PP
P
Structura robotului Versatron FA pentru care se va calcula MGD [i MGI este prezentat\ `n figura 5.15
z11
qoz
O O0 1
X2
q3
z3
x
xxx
4
4
4
55
5 6
6
6 6 7o oo o o33
3z z z
z
Fig.5.15. Structura cinematic\ a robotului
Versatran FA Parametrii D-H ai robotului Versatran – FA sunt : 1 2 3 4 5 6 σi 0 1 1 0 0 0 αi-1 0 0
2π
− 0
2π
− 2π
−
ai-1 0 0 0 0 0 0

Robotic\ 201 θi q1 0 0 q4 q5 q6
di 0 q2 q3 0 0 0 val εi din fig 0 + +
2π
− 0 0
Matricile de transformare omogene au expresiile:
−
=
100001000000
11
11
10
cssc
A
=
1000100
00100001
2
21 qA
−=
10000010
1000001
332
qA
−
=
100001000000
44
44
10
cssc
A
−
−
=
100000010000
55
55
54 cs
sc
A A
−
−
=
100000010000
66
66
65 cs
sc
Modelul geometric direct este dat de:
=⋅⋅⋅⋅⋅=
100
65
54
43
32
21
10
60
zzz
yyy
xxx
PzxPzxPzx
AAAAAAA
Trebuie s\ identific\m prima, a treia [i a patra coloan\ a matricii . ( )on
n TA0
~n cursul calculului trebuie s\ denumim toate expresiile care intervin pentru a putea fi reutilizate. Dac\ un RI posed\ 2 sau mai multe cuple R succesive cu axe paralele, trebuie, `nainte de a `ncepe, s\ calcul\m matricea corespunz\toare a acestora (o singur\ matrice). Dac\ parametrii D-H sunt `nc\rca]i atunci se calculeaz\: E1=C5*C6 E2=-S5*C6
E3=C4*E1-S4*C6
E4=C4*S5 A(3,1)=-S4 E1-C4 S6

Sistemul de comand\ al robo]ilor industriali 202
A(3,3)=-S4 S5 A(1,1)=C1 E3-S1 D2 A(1,3)=C1 E4-S1 C5 A(1,4)=-S1 q3 A(2,1)=S1 E3+C1 E2 A(2,3)= S1 E4+C1C5 A(2,4)=C1 q3
A(3,4)=q2
{i eventual dac\ este necesar pentru )( nn jy−
A(1,2)= A(2,3)*A(3,1)*A(3,3) A(2,1) A(2,2)= A(3,3)*A(1,1)*A(1,3) A(3,1) A(3,2)= A(1,3)*A(2,1)*A(2,3) A(1,1) Calculul complet al matricei necesit\ 9 opera]ii de adunare/sc\dere; 24 de `nmul]iri, 4 cos, 4 sin [i 16 ecua]ii. Calculul par]ial al (f\r\ coloana 2) necesit\ 6 adun\ri/sc\deri, 18 `nmul]iri, 4 cos, 4 sin [i 13 ecua]ii.
60A
60A
Determinarea modelului geometric invers –MGI (pentru comand\) Considera]ii generale 1) Prima etap\ const\ `n a calcula coeficien]ii matricei de trecere omogen\ `n func]ie de coordonatele opera]ionale x*
0nA * impuse OT. Este
mai u[or de calculat submatricea de pozi]ie a OT. 33*
0 xnR
Not\m `n continuare cu coeficien]ii matricei cunoscute. *ija
*0nA
2)Etapa a doua const\ `n a scrie un sistem de 9 ecua]ii, func]ie de q1, q1...qn care rezult\ prin identificarea elementelor din prima, a 3-ea [i a 4 a coloan\. Cele 9 ecua]ii sunt scrise coloan\ cu coloan\. Primele 6 sunt dependente [i pot fi reduse teoretic la 3 ecua]ii independente ultimele 3 sunt independente. 3) Etapa a treia const\ `n extragerea valorilor celor n coordonate generalizate din cele 9 ecua]ii independente. Dac\ num\rul de grade de libertate este 6, robotul este neredundant [i se pot g\si cele 6 coordonate generalizate. Dac\ D > 6 robotul este redundant [i ramân (n-6) coordonate generalizate care pot fi alese `n mod arbitrar. Dac\ pentru n=6 ultimele 3 cuple sunt de rota]ie concurente atunci 3 ecua]ii din sistem nu con]in decât necunoscutele q1, q2, q3 [i sunt rela]ii u[or de rezolvat. Ecua]ia: α , dac\ α , are 2 solu]ii [i anume: γθβθ =+ sincos 222 γβ ≥+

Robotic\ 203
( )
( )
+−++
=
++++
=
22
222
22
222
cos
sin
βαγβαεβαγ
θ
βαγβαεαβα
θ
cu ε 1±=
Calculul MGI pentru robotul VERSATRAN – FA 1) Prima etap\
Dac\ punctul de pe traiectoria de atins este definit de coordonatele cartiziene x* y* z* [i unghiurile r, p, y, atunci matricea de trecere se scrie:
*−
x
*60AE =
==
100
*34
*33
*31
*24
*23
*21
*14
*13
*11
*60
xaaxaaaxaaaxa
AE
2) Etapa a 2-a Cele 9 ecua]ii extrase din ecua]ia matricial\ sunt: *6
363 AA =
c1a11*+s1a21
*= c4 c5 c6 - s4 s6 -a31
* = s4 c5 c6 + c4 s6 c1a21
*+s1a11*=- s5 s6
c1a13*+s1a23
*= c4 s5
-a33* = s4 s5
c1a23*+s1a13
*= c5
c1a14*+s1a24
*= 0 -a34
* +q2 = 0
c1a24*+s1a14
*-q3= 0
3) Etapa 3 Calculul MGI poate fi organizat astfel: q2=a34
* 2*
242*
1413 aaq += ε 2 solu]ii →if q3 = 0 then q1 – arbitrar else c1=a24
*/q3 s1=a14
*/q3 q1=arctg2(s1, c1) endif c5=c1a23
*-s1a13*

Sistemul de comand\ al robo]ilor industriali 204
2555 1 cs −= ε → 2 solu]ii
q5 = arctg2(s5, c5) E3=c1a11
*+s1a21*
if s5=0 then ε5’=c5
q4+ε5’= arctg2(-ε5
’a31*, ε5
’E3) else E4=c1a13
*+s1a23*
c4=E4 / s5 s4 = - a33
* / s5 q4=arctg2(s4, c4) E1=c4E3+s1a31
* E2=c1a23
*+s1a11*
c6=c5E1-s5E2 s6=-(c4a31
*-s4E3) q6 = arctg2(s6, c6) Diferite configura]ii particulare Apari]ia a doi parametrii ε1 [i ε5 `n calcul, demonstreaz\ ca 4 configura]ii diferite ale robotului permit plasarea OT `n aceea[i stare cinematic\. Aceste configura]ii sunt indicate pe graficul urm\tor: Este de notat c\ q3 `[i p\streaz\ sensul constant `n cadrul mi[c\rii permise – de cupla 3 [i deci exist\ cel mult 2 modele geometrice inverse.
q
2
q3
-q3
q1
q1+π
q 5 q
-
ε1=1 ε1=−1
ε5=1 ε5=1ε5=−1 ε5=−1
5 q q5+ 5+
π π
ππ
π π-
q q4 4
-
4+ 4+q q- -
q q6 6q q6+ 6+- -

Robotic\ 205 Cazuri speciale MGI nu poate fi calculat `n 2 cazuri: a) q1 este nedeterminat dac\:
( ) ( ) 02*24
2*14 =+ aa care se poate `ntâmpla pentru toate configura]iile RI care
au punctul O6 pe axa de leg\tur\, a[a cum se prezint\ `n figura de mai jos:
b) pentru coordonalizate q4 [i q6 nu pot fi evaluate decât dac\ s5=0.
fi ]i t S5 0
5.4.2. Modelul cinematic al unui robot
Comanda `n pozi]ie a mi[c\rilor elementului final al robotului presupune cunoa[terea modelului geometric invers. Ob]inerea analitic\ a acestui model este dificil\ iar pe de alt\ parte existen]a mai multor func]ii inverse f-1(x) ridic\ probleme la alegerea uneia dintre ele. O solu]ie pentru dep\[irea acestor inconveniente const\ `n calculul modelului cinematic [i al modelului diferen]ial. Determinarea acestor modele utilizeaz\ [i rezultatele ob]inute `n programele pentru calculul modelului geometric.

Sistemul de comand\ al robo]ilor industriali 206
Modelul cinematic al unui robot este modelul care `ncerc\ controlul vitezei
ttdz /)( (t- perioada de tact a sistemului de comand\) a organului terminal
al robotului. Derivarea rela]iei : ))(()( tqftz = nu se poate face cu precizie
decât dac\ cre[terile componentelor vectorului )(tz [i implicit ale vectorului
)(tq ramân suficient de mici, [i se pot aproxima prin diferen]ialele acestor vectori. De aceea, calculul modelului cinematic se reduce la caculul
modelului diferen]ial al rela]iei ))(()( tqftz = 5.4.2.1 Modelul diferen]ial direct al unui robot
Modelul diferen]ial direct al unui robot este modelul care permite
calculul diferen]ialei dx, a coordonatei opera]ionale , `n func]ie de
diferen]iala dq a vectorului coordonatelor generalizate .
−
z−
q Intervine `n acest caz explicit sau implicit o matrice J(q), dependent\ de configura]ia RI, denumit\ matrice Jacobian\ a RI [i cu care se poate scrie
dx= (q)dq JObserva]ii: 1)Dac\ coordonatele opera]ionale [i generalizate variaz\ `n cantit\]i foarte mici δx cu δq se echivaleaz\ δx cu dx [i δq cu dq. ~n acest caz putem scrie:
δx = (q) δJ q care este denumit model varia]ional direct al RI 2) Dac\ se calculeaz\ derivatele `n raport cu a coordonatelor
opera]ionale [i generalizate [i se ob]ine •
x•
q modelul cinematic direct al robotului:
••
⋅= qqJx )(
Exist\ 2 metode de calcul al modelului diferia]ial direct al unui robot. Metoda indirect\, care const\ `n a calcula mai `ntâi matricea Jacobian\ [i mai apoi modelul diferen]ial direct (M.Df.D.). Matricea Jacobian\ poate fi ob]inut\ cu ajutorul derivatelor par]iale `n raport cu coordonatele generalizate ale elementelor matricei care constituie modelul geometric direct:
nA0
( )qqA
qJn
∂∂
= 0)(

Robotic\ 207 Metoda direct\ care const\ `n a exprima diferen]iala dx a coordonatelor opera]ionale `n func]ie de diferen]iala dq a coordonatelor generalizate. Se poate ar\ta c\ metoda direct\ este cea mai simpl\ [i de aceea va fi prezentat\ `n continuare. Metoda direct\ de calcul a modelului diferen]ial direct Vom demostra mai `ntâi c\ diferen]iala dx se exprim\ `n func]ie de componentele, `n reperul R0, a
- diferen]ialelor de pozi]ie dp [i - diferen]ialelor de orientare dϕ
ale reperului Rn P(0)=(x, y z)t ⇒ dp(0)=(dx, dy dz)t Vom nota:
( )( )
t
zyx
tzyx
dddddpdpdpdp
⋅⋅=
⋅⋅=
ϕϕϕϕ )0(
)0(
On
zn-
x1
On+1
an
d
d
n+1
n+1
αP
zn+1
z0
x0x0
Fig.5.16 Dac\ remarc\m c\ modific\rile coordonatei x datorate modific\rii pozi]iei [i orient\rii sunt date de (fig.5.16) :
=
+⋅+= +
)0()0(
)0()0( )0(1
n
nR
nnnnP
zx
x
Pzdxax
[i c\ :

Sistemul de comand\ al robo]ilor industriali 208
−=−==
−=−==−∧−−−−−
−∧−−−−−
ϕϕϕ
ϕϕϕ
dzxdzzdzd
dxxdxzdxd
nnnxn
nnnxn
unde s-a folosit rela]ia vectorial\ : −∧−−
⋅=× babaSe deduce calculul lui dx `n func]ie de dp(0) [i dϕ(0)
×−
×−=
=
++=
−
−
+
)0()0()0(
)0()0()0(
)0(
)0(
)0()0(1)0(
)(
)(
ϕ
ϕ
dz
dxdzdx
dx
dpdzddxadx
n
n
n
nR
nnnnp
~n acest fel calculul lui dx `n func]ie de dq se rezum\ la a calcula: ttt iddpds )( )0()0()0( ϕ=
`n func]ie de dq, pentru c\:
=
⋅=
3333
3333
)0(
)(00)(
)(
)42.5()(
xRRx
xxpp
xMxM
xM
dsxMdx
Matricea M(x) este de dimensiuni (mx6) [i are forma urm\toare : a) coordonate carteziene :
P (l m n) M (x )
1 0 0
0 1 0
0 0 1
deci dp dl dp dm dp dn
(1)t
p p
x y z1 1 1
= =
= = = b) coordonate cilindrice:
P zdp d d
dp d d
dp dz
M x
t
x
y
z
p p
( ) ( cos sin )cos sin
sin cos
( )cos sinsin cos
1
1
1
1
0
0
0 0
=
= −
= +
=
= −
ρ θ ρ θ
θ ρ ρ θ θ
θ ρ ρ θ θ
θ θθ
ρθ
ρ1
c) coordonate sferice :

Robotic\ 209
Pdecidp d d d
dp d d d
dp d d
de unde
M x
t
x
y
z
p p
( ) ( cos sin sin sin cos )
cos sin sin sin cos cos
sin sin cos sin sin cos
cos sin
( )
cos sin sin sin cossinsin
cossin
cos cos sin cos sin
1
1
1
1
0
=
= − +
= + +
= −
= −
−
ρ θ φ ρ θ φ ρ φ
θ φ ρ ρ θ φ θ ρ θ φ
θ φ ρ ρ θ φ θ ρ θ φ
φ ρ ρ φ φ
θ φ θ φ φθ
ρ φθ
ρ φθ φρ
θ φρ
φρ
φ
φ
Expresiile lui MR(xR) pentru : a) parametrii ξ, η, ζ:
α ξ η ζ ξ η ζ
βξ η ζ
ξ η ζ ξ η ζ
γ
= + + + +
=+ +
− + + + +
= −
12
12
1 1 12
12
12
2 2 2 2 2 2
2 2 22 2 2 2 2 2
ctg
ctg
( )
[ ( )]
+
de unde :
M xR R( ) =+ −
+ + −− + +
α β ξ β ξη γ ζ β ξζ γ ηβ ξη γ ζ α β η β ηζ γ ξβ ξζ γ η β ηζ γ ξ α β ξ
2
2
2
c) parametrii Euler:
Prima component\ a ecua]iei vectoriale: dx , a doua
ecua]ie:
d xn+ += ×1 1φ n
dy d yn+ = ×1 φ n 1+ , a treia ecua]ie dz [i expresia
diferen]ialei ecua]iei : permit constituirea urm\torului sistem :
d zn+ = ×1 φ n+1
p q r s2 2 2 2 1+ + + =
2222 2 2 2 0
1 1
1 1
1 1
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )
pdp sds pr qs d pq rs dqdq sds pq rs d qr ps drdr sds qr ps d pr qs dpdp qdq rdr sds
y z
z x
x y
+ = − − ++ = − − +
+ = − − ++ + + =
φ φφ φφ φ
Se ob]ine:

Sistemul de comand\ al robo]ilor industriali 210
M x
s r qr s pq p sp q r
R R( ) =
−−
−− − −
1
2
~n loc s\ efectu\m calculul rela]iei (5.42), vom calcula rela]ia vectorial\
unde: dqjsd−−
=
= −
−−
ϕd
pdsd
`n func]ie de dq. Vom introduce variabila binar\ σi ,care va lua valori `n func]ie de tipul cuplei cinematice i. σi = 0 dac\ cupla este de rota]ie 1 dac\ cupla este prismatic\
Fie iσ conjugatul coeficientului σ − −
−= ii σ1 Coordonata generalizat\ qi se va putea exprima printr-o singur\ rela]ie indiferent de tipul cuplei.
iiiii dq ⋅+⋅=−
σθσ
Consider\m cupla i a c\rei ax\ este definit\ de vectorul unitar ik−
.O cre[tere infinitezimal\ dqi a coordonatei generalizate qi provoac\ asupra
OT o cre[tere infinitezimal\ a pozi]iei d [i o cre[tere infinitezimal\ a
orient\rii .
ip−
id−
ϕ a) dac\ cupla este prismatic\ )1( =iσ
z-
O
O +dO
O +dO
n n
n n
dqi
On
=
⋅=−−
0i
iii
dkdqpd
ϕ
b) dac\ cupla este de rota]ie )0( =iσ

Robotic\ 211
i
k i-
On
Pin
On+dOn
Oi
dqi
_____
)(
niin
iii
iniii
oop
kdqd
pkdqpd
=
⋅=
×⋅=
−
−−
−−−
ϕ
Putem regrupa cazurile a) [i b) utiliz^nd
parametrii [i σ [i scriind concentrat vom avea:
iσ−
⋅⋅=
⋅
×⋅+⋅=
−−
−−−−
iiii
iiniiii
dqkd
dqpkkpd
σϕ
σσ
Teorema suprapunerii efectelor ne permite s\ consider\m cre[terile infinitezimale `n pozi]ie [i orientare ale OT ca fiind suma celor datorate tuturor cuplelor cinematice.
⋅⋅=
⋅
×⋅+⋅=
∑
∑
=
−−−
−
−−−−
i
n
iiii
i
n
iiniiii
dqkd
dqpkkpd
1
1
σϕ
σσ
Aceste expresii ne permit s\ scriem;
dqJsd ⋅=−−
(5.53) unde:
×+×+×+= −−−−−−
−−−−−−−−−−−−−
121211
2222211111
nn
nnnnnnnn
kkk
pkkpkkpkkJσσσ
σσσσσσ
matricea vectorial\ , de dimensiune 2xn, este numit\ −
J matricea Jacobian\ vectorial\. Rela]ia vectorial\ (5.43) poate fi proiectat\ `n reperul R0, de exemplu, ceea ce permite s\ scriem rela]ia extrinsec\:
dqJds ⋅= )0()0(

Sistemul de comand\ al robo]ilor industriali 212
)0(
)0(
)()(
)(JxMqJdqJxMdx
⋅=
⋅⋅=
Matricea scalar\ )J , de dimensiune 6xn, este proiec]ia matricei
vectoriale `n reperul R
0(
−
J 0.
Dac\ proiect\m matricea `n reperul R−
J J ob]inem matricea scalar\ [i putem scrie: )( jJ
dqJA
Ads jiJ
J
)(0
0)0( 0
0⋅
=
unde este matricea omogen\ de trecere de la RJA0 0 la Rj. Pentru a simplifica [i mai mult calculul lui ds(0) este util s\
introducem o alt\ matrice vectorial\ . −
iJ
Prin defini]ie, matricea de dimensiune 2xn este: −
iJ
×+×+×+= −−−−−−
−−−−−−−−−−−−−
121211
2222211111
nn
nnnnnnnni
kkk
pkkpkkpkkJσσσ
σσσσσσ
cu care constat\m c\:
nJJ−−
≡ pentru i=n
Aceast\ identitate permite s\ leg\m matricile [i prin rela]ia −
J−
iJ
iin JEpEJ
−∧
−
⋅
−=0
Dac\ proiect\m aceast\ rela]ie `n reperul RJ ob]inem rela]ia extrinseac\:
)()(
0jijin J
EpEJ
−∧
−
⋅
−=
Se poate demonstra c\ cei mai simplii termeni ai lui se ob]in pentru
p fiind un indice “preferen]ial” dat de
)( jiJ
=+=pjpi 1
2nE=p partea `ntreag\
a lui n/2
)(1 ppJ + este numit\ matrice Jacobian\ preferen]ial\. ds(0) este organizat
sub forma:

Robotic\ 213
[ ]
⋅⋅⋅
−⋅
⋅⋅⋅
= +
+
∧
−
− dqJE
pEA
AA
Ads pp
pnppp
pp
)(1)(,1
1
110
10
)0(00
00
0 (5.44)
~n aceea[i manier\ ca la MGD Ex. Pentru RI cu 6 grade de libertate n=6, [i p=3. deci:
[ ]
⋅⋅⋅
−
⋅
⋅⋅⋅
=
∧
dqJEpE
AA
AA
AA
ds )3(4)3(46
32
32
21
21
10
10
)0(00
00
00
0
Dac\ ultimele 3 cuple sunt de rota]ie [i concurente ⇒ [i deci:
046 =−
p
[ ]
⋅⋅⋅
⋅
⋅⋅⋅
= dq
DCA
AA
AA
AA
ds0
00
00
00
32
32
21
21
10
10
)0(
5.4.2.2 Modelul diferen]ial invers al unui robot
Modelul diferen]ial invers permite calculul diferen]ialelor dq, dac\
exist\, ale vectorului care corespunde diferen]ialelor dx−
q , impuse ale
vectorului , plec^nd de la o situa]ie impus\. −
z Acest calcul este func]ie de configura]ia `n care se g\se[te RI. Deoarece exist\ mai multe configura]ii pentru acee[i situa]ie impus\ x* la OT, pentru fiecare dintre acestea se asociaz\ un modelul diferen]ial invers. Calculul dq func]ie de ds:
[ ])0()0()0()0()0()0()0( zyxzyx ddddpdpdpds ϕϕϕ=
se bazeaz\ mai `nt^i pe rela]ia:
)0()( dsxMdx =
Dac\ N(x) este inversa matricei M(x)
[ ]6
1
)()()()(IxNxM
xMxN=⋅
= −
cre[terile infinitezimale ds(0) se calculeaz\ cu rela]ia: dxxNds )( *
)0( =
Rezult\ faptul c\ modelul diferen]ial invers se rezum\ la a exprima dq `n func]ie de ds(0). Metode de calcul. Modelele diferen]iale inverse pot fi calculate cu inversarea modelelor diferen]iale directe utiliz^nd toate configura]iile q* care

Sistemul de comand\ al robo]ilor industriali 214
corespund la situa]ia dorit\ x* sau prin diferen]ierea tuturor solu]iilor modelului geometric invers (MGI), care corespund la situa]ie impus\ x*
[ ] [ ] dxxMJdq
dqJxMdx11
)0(
)0(
)(
)(−−=
=
sau din MGI :
EAsau
tzftq
n
i
=
=−−
0
))(()(
prin diferen]ierea tuturor solu]iilor q*. Calculele impun folosirea matricei inverse N(x) care are forma:
=
)(00)(
)(rR
pp
xNxN
xN
unde Np(xp) [i NR(xR) depind de tipul coordonatelor alese (carteziene, cilindrice, sferice) [i de sistemul prin care se exprim\ orientarea.
[ ] dxxNJdq )( *1)0(
−=
Dac\ sistemul este compatibil, este mai avantajos de rezolvat reutiliz^nd elementel ja calculate dec^t de a calcula o matrice
invers\ generalizat\
e dq de
[ ] 1)0(
−J Dac\
[ ][ ][ ]
⋅⋅⋅
⋅
⋅⋅⋅
= +
−
− dqJBA
AA
Ads ppp
p
pp
)(11
110
10
)0( 00
00
Se poate calcula `ntotdeauna:
[ ] [ ]
⋅⋅⋅
⋅⋅⋅
=
−
−+ )0(0
1
01
1
1)(1 0
00
0ds
AA
AA
BdqJ pp
pp
pp
unde este matricea Jacobian\ preferen]ial\. )(1 ppJ +
p=[n/2] parte `ntreag\ 5.4.3. Scheme de comand\ care utilizeaz\ modelul geometric sau modelul
cinematic ~n cazul `n care comanda robotului este efectuat\ `n spa]iul
coordonatelor opera]ionale ( ) calculul comenzii Q poate fi efectuat utiliz^nd una din schemele:
−
z

Robotic\ 215
MGI
MDId/dt
d/dt
q(t)
q(t)
q(t)
*
*.
..*σ
+x*(t)
Fig.5.17. Schema de comand\ utilizând modelul geometric
invers Figura 5.17. prezint\ schema de comand\ care utilizeaz\ modelul geometric invers. Plecând de la un o atitudine cinematic\ impus, la momentul t, pe traiectorie (pozi]ie [i orientare), dat\ de , se
calculeaz\ modelul geometric invers [i solu]iile acestuia, , se
deriveaz\ `n raport cu timpul pentru a ob]ine valorile [i . Aceste valori sunt m\rimile de intrare pentru modelul dinamic invers (MDI) care va calcula vectorul eforturile necesare, σ la nivelul articula]iilor la momentul t.
)(* tx
)(tq•
)t•
)(tq•
(q
~n figura 5.18 se prezint\ schema de comand\ care utilizeaz\ modelul cinematic al robotului.
Fig.5.18. Schema de comand\ care utilizeaz\ modelul
cinematic (diferen]ial) invers Valoarea programat\ x este comparat\ cu valoarea real\ [i cu ajutorul modelului cinematic (diferen]ial) invers se comand\ mici deplas\ri dq la nivelul articula]iilor pentru a corecta eroarea (dac\ exist\). Valorile
sumate [i derivatele acesteia `n raport cu timpul [i sunt folosite ca intrare `n modelul dinamic invers ca [i `n schema precedent\.
)(* t
)(tq•
)(tq••
)(tq
5.4.4. Modele dinamice ale robo]ilor
Etapa de analiz\ dinamic\ a robo]ilor industriali este important\ atât `n faza de proiectare a structurilor mecanice [i a sistemelor de comand\ cât [i `n procesul func]ion\rii curente a acestora fiind legat\ direct de ob]inerea performan]elor tehnice, de func]ionare a robotului `n conformitate cu programul de lucru. Rezultatul analizei este format din modele matematice ale structurii mecanice. Modelul dinamic face leg\tura `ntre for]ele care ac]ioneaz\ asupra corpurilor componente ale structurii mecanice [i mi[carea imprimat\ acestor corpuri.

Sistemul de comand\ al robo]ilor industriali 216
Modelul dinamic al RI descrie rela]iile `ntre momentele [i for]ele care ac]ioneaz\ asupra diferitelor elemente ale RI (for]ele generalizate) [i coorodnatele, vitezele [i accelera]iile generalizate ale articula]iilor.
),,,(−−−−−
•••
= Fqqqfσ (5.54)
unde: - vectorul for]elor generalizate, exprimate printr-un moment de torsiune, dac\ articula]ia este de rota]ie, sau printr-o for]\ dac\ articula]ia este de transla]ie;
−
σ
−
q - vectorul coordonatelor generalizate, reprezent^nd pozi]iile articula]iilor; •••
−−
qq, - vectorii vitezelor [i accelera]iilor generalizate; −
F - vectorul for]elor generalizate externe care ac]ioneaz\ la un moment dat asupra robotului. Toate m\rimele vectoriale din rela]ia (5.54) sunt func]ii de timp. Rela]ia (5.54) va conduce la un sistem de ecua]ii diferen]iale pe baza c\rora se pot rezolva 2 probleme ale roboticii. Modelul dinamic direct al RI care const\ `n determinarea vectorilor
, la momentul t, atunci c^nd este cunoscut vectorul for]elor
generalizate σ la acel moment de timp .
−
q•••
−−
qq,−
Modelul dinamic invers al RI care
const\ `n determinarea vectorului σ −
necesar `n articula]ii, la momentul t,
astfel `nc^t RI s\ execute o mi[care precizat\ prin vectorii , q . −
q•••
−−
q, Modelul dinamic invers (MDI) este necesar pentru conducerea RI iar MDD pentru simularea comport\rii RI `n vederea optimiz\rii. Modelul dinamic al RI poate fi ob]inut prin aplicarea legilor mecanicii, exist^nd mai multe abord\ri echivalente (Lagrange, Newton-Euler, d’Alambert, Kane). Cele mai cunoscute strategii pentru determinarea MD ale RI sunt urm\toarele: ♦ Formalismul bazat pe ecua]iile Newton-Euler are ca principal avantaj complexitatea redus\ a calculelor (este de ordinul (n), unde n este num\rul gradelor de libertate, ceea ce `l face indicat pentru conducerea `n timp real. Rela]iile date de sistemul (5.54) sunt implicite, astfel c\ nu pot fi puse `n eviden]\ influen]a diferitelor tipuri de for]e [i momente asupra dinamicii RI; ♦ Formalismul bazat pe ecua]iile Lagrange are o complexitate mare a calculelor (este de ordinul (n4)) ceea ce `l face dificil de utilizat `n timp real. ~n schimb, `n acest caz, rela]iile date de sistemul (5.54) sunt explicite `n

Robotic\ 217
func]ie de , ,. Pot fi puse astfel `n eviden]\ influen]a diferitelor tipuri de for]e [i momente asupra dinamicii RI, formalismul Lagrange este cel mai potrivit pentru simularea [i analiza performan]elor RI.
−
q•••
−−
qq,
5.4.4.1 Formalismul Newton-Euler Simplitatea modelului (5.54) rezid\ din faptul c\, `n locul matricilor D-H se utilizeaz\ calculul cu vectori. Algoritmul de calcul are o constitu]ie recursiv\ `n 2 etape: • o recursie `nainte – de la segmentul O spre segmentul n al RI pentru
calculul vitezelor [i accelera]iilor unei cuple `n func]ie de viteza [i
accelera]ia a cuplei precedente;
−
v−
a• o recursie `napoi (de la efector spre baza RI) pentru calculul for]elor
generalizate. Dac\ not\m cu: •
v - accelera]ia de transla]ie; ω - accelera]ia de rota]ie •
Atunci asupra corpului Ci al RI vor ac]iona:
iii vmp ⋅= - momentul liniar
iiih ωϕ ⋅= - momentul unghiular
Derivatele `n raport cu timpul ale acestor momete vor fi:
⋅×+⋅=
⋅=
−−
•
−
•
−
•
−
•
−
ii
iii
i
ii
i
h
vmp
ωϕωωϕ (
Definirea for]elor [i momentelor care ac]ioneaz\ asupra corpurilor
Ci Not\m:
−if - for]a de leg\tur\ exercitat\ `n punctul Oi de corpurile Ci-1 asupra
corpului Ci
−in - momentul exercitat `n punctul Oi de corpurile Ci-1 asupra corpului Ci.
−
iF - va fi for]a rezultant\ care ac]ioneaz\ asupra corpului Ci
−
iN - va fi momentul rezultant care ca]ioneaz\ asupra corpului Ci.

Sistemul de comand\ al robo]ilor industriali
ni
ni+1
O
Oi
i+1
f fi- -
-i
-
G i
sii
si+1,i
-mgz-0
d-ii
di+1,i
C i
Fig.5.19. Eforturile ce ac]ioneaz\ asupra
corpului Ci al robotului
218
Din figura 5.19 rezult\:
×+×−−=
⋅⋅−−=
++−
+
−−
−
−
+
−−
1,1
1
01
iii
iii
iii
iiii
fsfsnnN
zgmffF
Calculul intrisec iterativ al MD se bazeaz\ pe aplicarea teoremei momentului liniar (Newton) [i teoremei momentului unghiular (Euler) pentru fiecare din cuplele RI. Aplicate asupra cuplei Ci , aceste teoreme se exprim\ sub forma:
=
=
•
−−
•
−−
ii
ii
hN
pF
Sistemul de rela]ii date de calculul iterativ direct va fi de forma:
+=
+=
+=
+=
++++
••
+
•
++++
++
••
+
••
+
•
++
•
+
),,,(
),,(
),,,(
),(
11111
1111
1111
111
ii
iiiiii
ii
iiiii
iiiiiii
iiiii
TRgvv
TRgvv
Rqqg
Rqg
ωω
ω
ωωω
ωω

Robotic\ 219 `n condi]iile ini]iale:
⋅=
==−
•
−
00
00 0
zgα
ωω
Sistemul de rela]ii date de calculul iterativ invers va fi de forma:
⋅+⋅=
+=
+=
−−−−
−
+++
−
+
−
+
•
−
+
−
)()(
),,,(
),,(
1111
11
iii
iiiii
ii
iiii
iii
iiii
ii
fznz
TRfgnn
Rvmgff
σσσ
δ
unde matricile sunt ob]inute de la modelul geometric
direct al robotului, [i T fiind submatricile de rota]ie [i de pozi]ie `ntre segmentele i+1 [i i ale robotului.
= ++
+ 1011
1
ii
iii
iTR
A
iiR 1+
ii 1+
5.4.4.2 Formalismul Lagrange
Determinarea modelului dinamic al robotului, `n acest caz, se bazeaz\ pe utilizarea matricilor D-H care descriu atitudinea cinematic\ relativ\ a segmentelor RI. Ecua]iile lui Lagrange pentru un sistem de corpuri rigide sunt de forma:
kk
kqL
q
Ldtd
σ=∂∂
−
∂
∂• (5.55)
____,1 n=σ
unde L este func]ia lui Lagrange dat\ de rela]ia L = K – P (5.56)
K – fiind energia cinetic\ a RI; P – fiind energia poten]ial\ a RI; qk – componente ale vectorului coordonatelor generalizate care determin\ univoc atitudinea RI; qk=θ – pentru o cupl\ de rota]ie; k
qk=dk – pentru o cupl\ de transla]ie; •
kq - viteza articula]iei k (liniar\ sau unghiular\);
σk – for]a generalizat\ `n articula]ia k (for]\ pentru articula]ie de transla]ie sau moment pentru o articula]ie de rota]ie) cu expresia:

Sistemul de comand\ al robo]ilor industriali 220
kkk cQ +=σ
unde este cuplul gravita]ional [i c cuplul for]elor exterioare `n articula]ia k.
kQ k
Dup\ calcule deosebit de laborioase se ajunge la sistemul matricial de ecua]ii:
σ=++⋅+⋅••
−
•
−−
••
)()(),()( qGqFqqqCqqM (5.57)
unde, M(q) – este matricea simetric\, de iner]ie `n spa]iul articula]iilor, de dimensiune (n x n). Elementele matricei M, sunt de forma: ),,( 1
10
ij
iiij AAJfm −
−=
unde este matricea momentelor de iner]ie. iJ),,,,,,,,,( iiiiiiixzyzxyzzyyxxi mzmymxmIIIIIIfJ =
cu - momentele de iner]ie axiale (ex. ) zzyyxx III ,, ( )dmzyI iixx ∫ += 22
zxyzxy III ,, - momentele de iner]ie centrifugale (ex. ) ( )dmyxI iixy ∫ +=
),(•
qqC - este un vector de dimensiune (n x 1) care modeleaz\ efectul for]elor centrifuge [i Coriolis;
)(qF - este matricea care modeleaz\ frec\rile v^scoase [i coulombiene. ~n general, `ntr-o prim\ faz\ a model\rii dinamice se neglijeaz\ G(q) – vectorul de dimensiune n x 1 ale c\rui elemente modeleaz\ efectul for]elor gravita]ionale asupra segmentelor RI.
−σ este un vector n x 1 care are drept componente for]ele generalizate.
Rela]ia (5.57) se mai poate scrie:
)())(())())((()()())(()())(( 2 tFtqGHqtqCtqtqtqBtqtqA ji +=+⋅⋅+⋅•
−
−•
−
•
−
−••
−
−
(5.58)
unde : A – matricea de iner]ie (de dimensiune n x n); B – matricea for]elor Coriolis, ea `nmul]indu-se cu produsul vitezelor a dou\
articula]ii diferite ; T
nn qqqqqq
⋅⋅⋅⋅⋅⋅
••
−
••••
,1,31,21
C – matricea for]elor centrifuge (n x n;) G – (n x 1) vectorul for]elor de greutate; F(t) – vectorul (n x 1) al for]elor generalizate. Sistemele (5.57) [i (5.58) reprezint\ sisteme de ecua]ii diferen]iale de ordin 2, neliniare. ~n func]ie de elementele cunoscute se rezolv\ modelul dinamic direct sau modelul dinamic invers .

Robotic\ 221 Dac\ vectorul (kσ este cunoscut, necunoscutele vor fi
. Apoi pe baza MGD se va determina vectorul al
coordonatelor opera]ionale.
)t
)(),(),( tqtqtq−•
−)(tz
−
~n cazul MGI, pentru un interval de timp precizat, sunt cunoscute pozi]iile articula]iilor, vitezele [i accelera]iile acestora. ~n acest caz MDI are ca scop determinarea σ necesare `n articula]ii pentru a ob]ine mi[carea dorit\.
k
Pe baza cunoa[terii [i a MGI s-ar putea ob]ine o comand\ `n bucl\ deschis\ a RI. Aceasta este foarte pu]in utilizat\ datorit\:
•••
qqq ,,
- perturba]iilor `n func]ionare (modelul nu a inclus for]ele de frecare) - imperfec]iuniilor constructive. MD poate fi folosit pentru comand\ `n bucl\ `nchis\ printr-un set de ecua]ii de stare. Starea RI este constituit\ din vectorul de stare.
T
nn tqtqtqtqtx
=
••
)(...........)()().......()( 11
Forma MD care se preteaz\ pentru ob]inerea ecua]iei de stare este (5.58) de unde se poate ajunge la o rela]ie de forma:
)())(())(()(``
ttxBtxAtx σ++=•
care permite conducerea RI pe baza formalismului intrare stare
ie[ire ⇒
⇒~n determinarea formei expresiilor (5.57) (5.58) nu s-au luat `n
considerare: for]ele generalizate disipative, influen]a ac]ion\rilor , etc, iar segmentele robotului au fost considerate rigide.