Cap 1 - Teoria Sistemelor
7
Noţiuni de teoria sistemelor 1 Noţiuni de teoria sistemelor 1.1 Clasificare sistemelor Un sistem este un ansamblu de componente, adică o mulţime de elemente şi o mulţime de relaţii între aceste elemente. Deci un sistem este un tot organizat, în sensul că orice sistem înseamnă mai mult decât suma componentelor sale, datorită includerii şi a relaţiilor existente între componente. Structura unui sistem este modul în care el este constituit din elemente şi legăturile dintre acestea. Mediul unui sistem este constituit din ansamblul elementelor care nu fac parte din sistemul respectiv. Legăturile sistemului cu mediul sunt legături orientate, intrările sau ieşirile, având sensul „la” sau „de la”, sau perturbaţii („zgomote”) la care sensul nu poate fi stabilit, fiind deci legături neorientate. Sistemul închis nu are nici o legătură cu mediul său. Sistemul deschis are legături orientate sau neorientate cu mediul său (Fig. 1.1). Sistemul simplu are puţine elemente şi legături între acestea, spre deosebire de sistemul complex care are multe elemente şi legături între ele. Sistemul concret are elemente materiale, spre deosebire de sistemul abstract care nu le are. Sistemul artificial este creat de om, iar sistemul natural există fără intervenţia omului. Sistemul determinist are legăturile orientate, iar sistemul stohastic are legăturile neorientate. Fig. 1.1 Sistem deschis 1.1.1 Funcţia de transfer Deci legăturile (relaţiile) dintre elementele sistemului sunt intrările (input) si ieşirile (output) fiecărui element component. Intrarea este influenţa pe care un element al sistemului o suferă din partea altui element al sistemului sau al mediului. Ieşirea este influenţa pe care elementul în cauză o exercită asupra unui element diferit din acelaşi sistem sau altul 1 (S) T x 1 x 2 x 3 x i y 1 y 2 y 3 y j z 1 z 2 z 3 z k
Transcript of Cap 1 - Teoria Sistemelor
Noţiuni de teoria sistemelor
1 Noţiuni de teoria sistemelor
1.1 Clasificare sistemelor
Un sistem este un ansamblu de componente, adică o mulţime de elemente şi o mulţime de relaţii între aceste elemente. Deci un sistem este un tot organizat, în sensul că orice sistem înseamnă mai mult decât suma componentelor sale, datorită includerii şi a relaţiilor existente între componente.
Structura unui sistem este modul în care el este constituit din elemente şi legăturile dintre acestea. Mediul unui sistem este constituit din ansamblul elementelor care nu fac parte din sistemul respectiv.
Legăturile sistemului cu mediul sunt legături orientate, intrările sau ieşirile, având sensul „la” sau „de la”, sau perturbaţii („zgomote”) la care sensul nu poate fi stabilit, fiind deci legături neorientate.
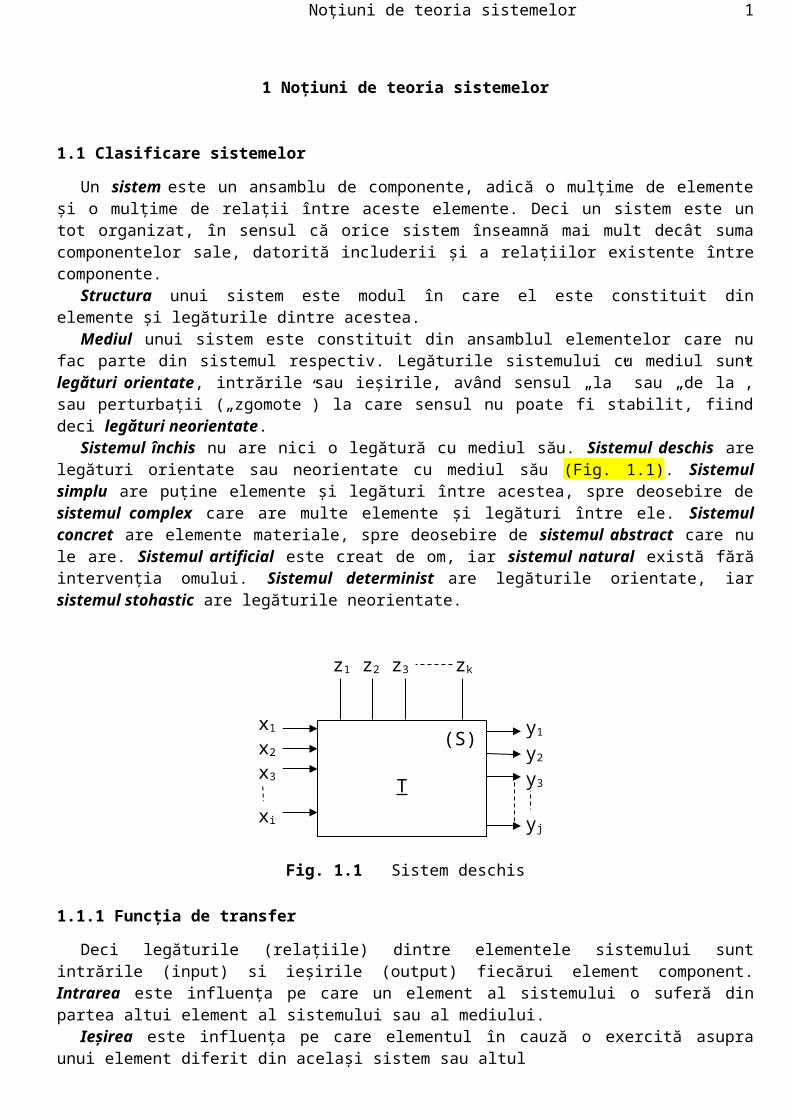
Sistemul închis nu are nici o legătură cu mediul său. Sistemul deschis are legături orientate sau neorientate cu mediul său (Fig. 1.1). Sistemul simplu are puţine elemente şi legături între acestea, spre deosebire de sistemul complex care are multe elemente şi legături între ele. Sistemul concret are elemente materiale, spre deosebire de sistemul abstract care nu le are. Sistemul artificial este creat de om, iar sistemul natural există fără intervenţia omului. Sistemul determinist are legăturile orientate, iar sistemul stohastic are legăturile neorientate.
Fig. 1.1 Sistem deschis
1.1.1 Funcţia de transfer
Deci legăturile (relaţiile) dintre elementele sistemului sunt intrările (input) si ieşirile (output) fiecărui element component. Intrarea este influenţa pe care un element al sistemului o suferă din partea altui element al sistemului sau al mediului.
Ieşirea este influenţa pe care elementul în cauză o exercită asupra unui element diferit din acelaşi sistem sau altul
Rolul sistemului constă în a transforma, într-un mod determinat, intrările X în ieşiri Y, rol ce este definit prin funcţia de transfer T. Funcţia de transfer a sistemului asigură deci transformarea mărimii de intrare, de excitaţie X = X (t), în mărimi de ieşire, de răspuns Y = Y (t), exprimată prin relaţia:
(1.1)
unde X este vectorul intrărilor:
(1.2)
Y este vectorul ieşirilor:
(1.3)
1
(S)
T
x1
x2
x3
xi
y1
y2
y3
yj
z1 z2 z3 zk
Noţiuni de teoria sistemelor
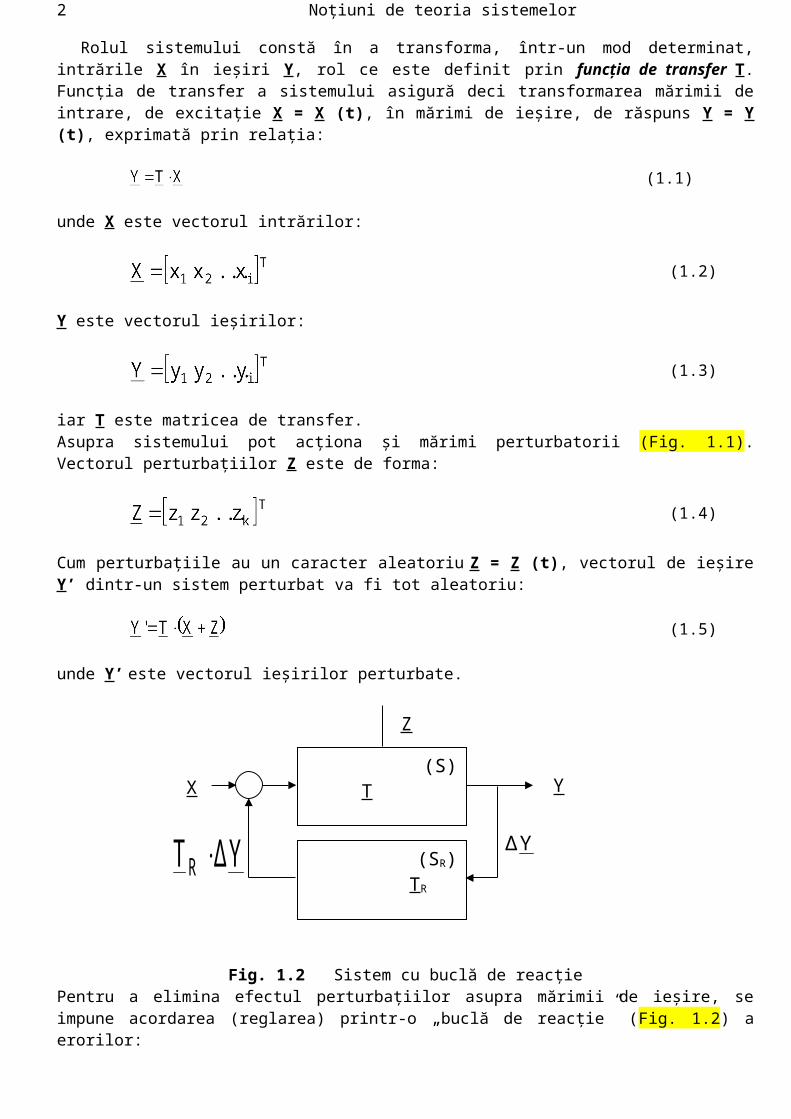
iar T este matricea de transfer.Asupra sistemului pot acţiona şi mărimi perturbatorii (Fig. 1.1). Vectorul perturbaţiilor Z este de forma:
(1.4)
Cum perturbaţiile au un caracter aleatoriu Z = Z (t), vectorul de ieşire Y’ dintr-un sistem perturbat va fi tot aleatoriu:
(1.5)
unde Y’ este vectorul ieşirilor perturbate.
Fig. 1.2 Sistem cu buclă de reacţiePentru a elimina efectul perturbaţiilor asupra mărimii de ieşire, se impune acordarea (reglarea) printr-o „buclă de reacţie” (Fig. 1.2) a erorilor:
(1.6)
având ca mărime de intrare erorile şi ca mărime de ieşire TR , unde TR este funcţia de transfer a buclei de reacţie, mărime care se constituie ca intrare in (S). Cu acestea funcţia sistemului (S), denumită şi „regulator” este descrisă de relaţia:
(1.7)
1.1.2 Ierarhizarea sistemelor
Orice sistem de rangul R conţine unul sau mai multe subsisteme de rang R-1:
(1.8)
Orice sistem de rangul R este un element al unui sistem de rang superior R+1, numit hipersistem:
(1.9)
Ierarhizarea sistemelor presupune cunoaşterea structurii unui sistem, modul în care acesta se compune din subsisteme şi relaţiile dintre acestea şi sistem. Sistemele se reprezintă schematic prin scheme bloc ca şi în figurile 1.1 şi 1.2.
1.2 Cuplarea a două sisteme
Două sisteme sunt cuplate dacă între ele există o singură relaţie de forma:
2
(S)T
Z
(SR)TR
YΔT R YΔ
X Y
Noţiuni de teoria sistemelor
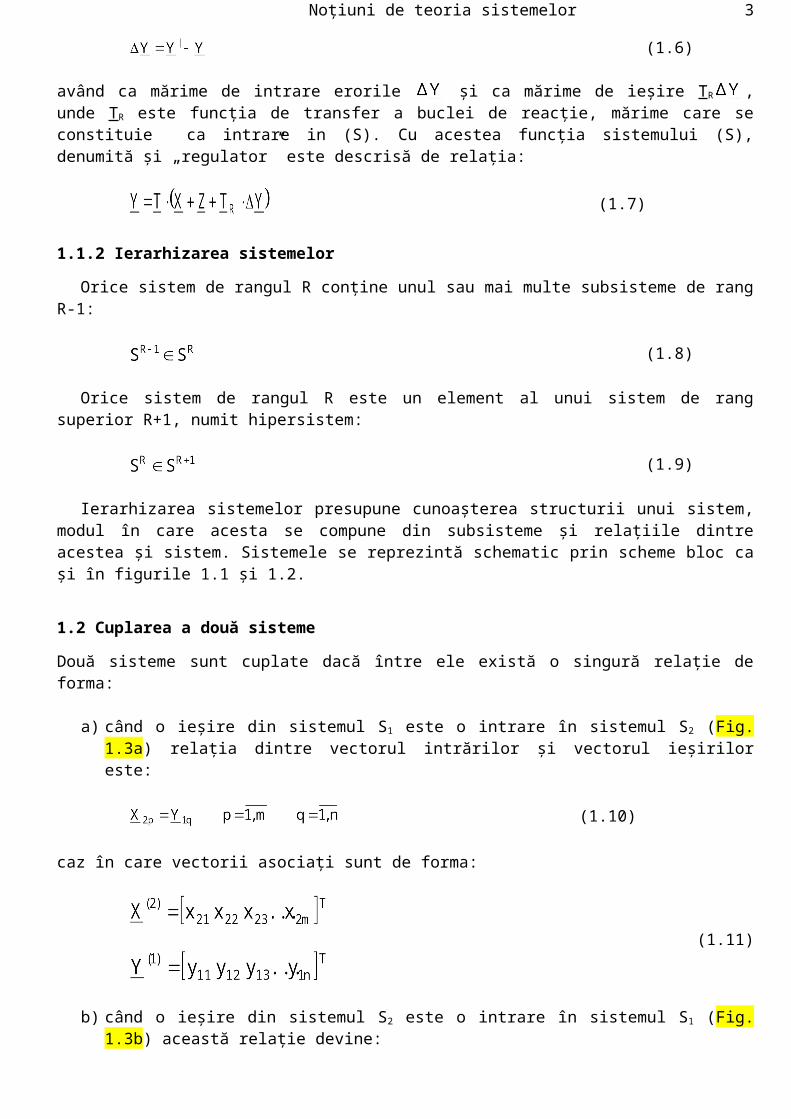
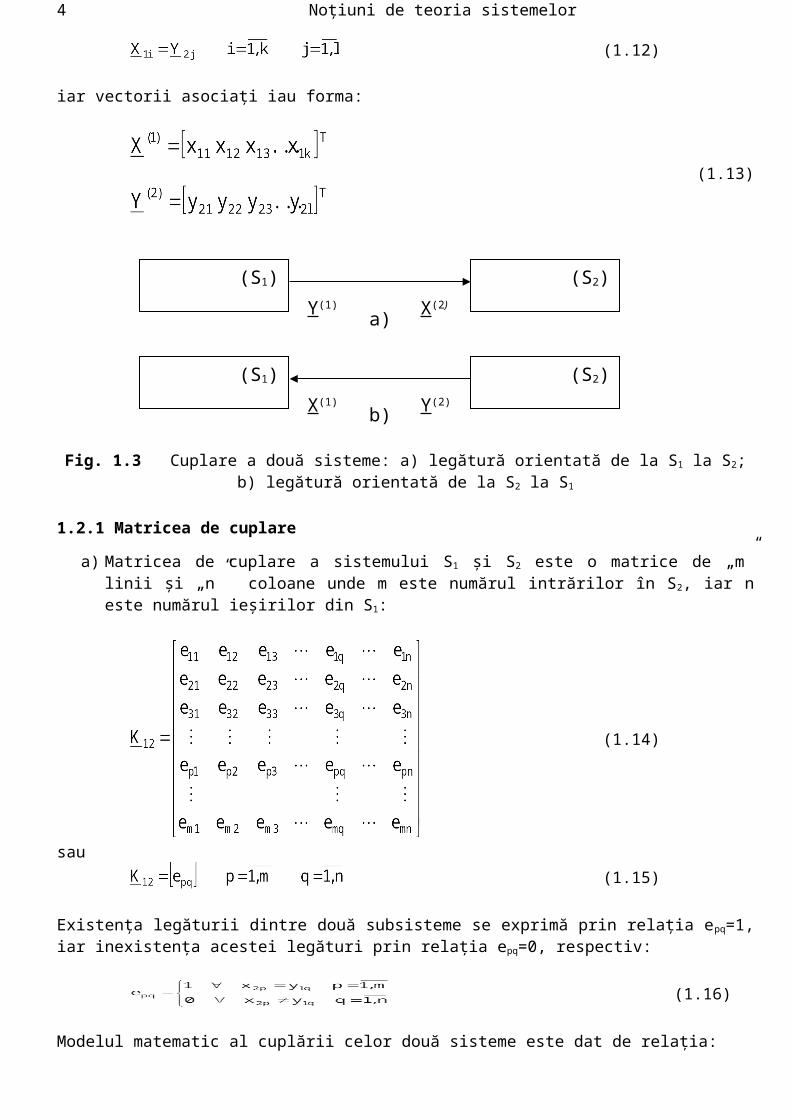
a) când o ieşire din sistemul S1 este o intrare în sistemul S2 (Fig. 1.3a) relaţia dintre vectorul intrărilor şi vectorul ieşirilor este:
(1.10)
caz în care vectorii asociaţi sunt de forma:
(1.11)
b) când o ieşire din sistemul S2 este o intrare în sistemul S1 (Fig. 1.3b) această relaţie devine:
(1.12)
iar vectorii asociaţi iau forma:
(1.13)
Fig. 1.3 Cuplare a două sisteme: a) legătură orientată de la S1 la S2; b) legătură orientată de la S2 la S1
1.2.1 Matricea de cuplare
a) Matricea de cuplare a sistemului S1 şi S2 este o matrice de „m” linii şi „n” coloane unde m este numărul intrărilor în S2, iar n este numărul ieşirilor din S1:
(1.14)
sau(1.15)
Existenţa legăturii dintre două subsisteme se exprimă prin relaţia epq=1, iar inexistenţa acestei legături prin relaţia epq=0, respectiv:
3
(S1) (S2)
Y(1) X(2)
(S1) (S2)
X(1) Y(2)
a)
b)
Noţiuni de teoria sistemelor
(1.16)
Modelul matematic al cuplării celor două sisteme este dat de relaţia:
(1.17)
b) Matricea de cuplare a sistemului S2 şi S1 este o matrice de „k” linii şi „l” coloane unde k este numărul intrărilor în S1, iar l este numărul ieşirilor din S2:
(1.18)
sau
(1.19)
Existenţa legăturii dintre două subsisteme se exprimă prin relaţia e ij=1, iar inexistenţa acestei legături prin relaţia eij=0, respectiv:
(1.20)
Modelul matematic al cuplării celor două sisteme este dat de relaţia:
(1.21)
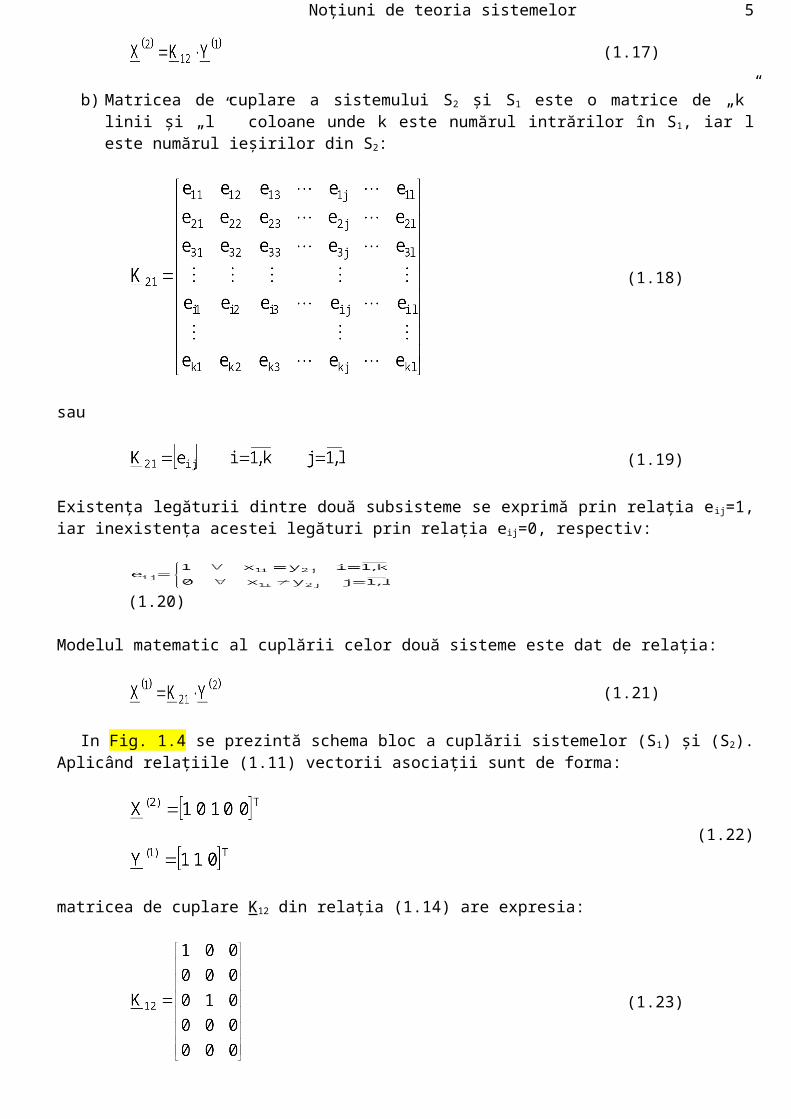
In Fig. 1.4 se prezintă schema bloc a cuplării sistemelor (S1) şi (S2). Aplicând relaţiile (1.11) vectorii asociaţii sunt de forma:
(1.22)
matricea de cuplare K12 din relaţia (1.14) are expresia:
(1.23)
iar elementele matricei de cuplare din relaţiile (1.16) conduc la:
e11=1 x21=y11 e32=1 x23=y12 (1.24)
4
Noţiuni de teoria sistemelor
Fig. 1.4 Schema bloc a cuplării sistemelor (S1) şi (S2)
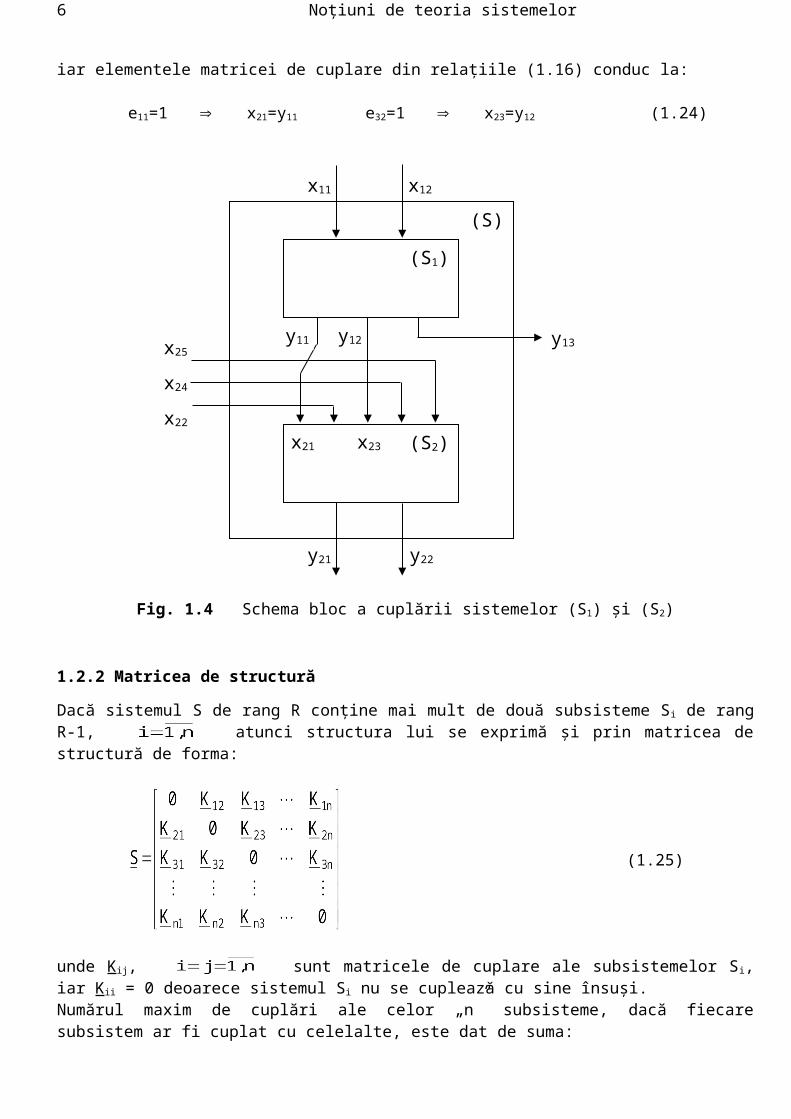
1.2.2 Matricea de structură
Dacă sistemul S de rang R conţine mai mult de două subsisteme S i de rang R-1, atunci structura lui se exprimă şi prin matricea de structură de forma:
(1.25)
unde Kij, sunt matricele de cuplare ale subsistemelor Si, iar Kii = 0 deoarece sistemul Si nu se cuplează cu sine însuşi.Numărul maxim de cuplări ale celor „n” subsisteme, dacă fiecare subsistem ar fi cuplat cu celelalte, este dat de suma:
5
(S)
(S1)
x11
(S2)
x12
x22
x24
x25
x21 x23
y13y11 y12
y21 y22
Noţiuni de teoria sistemelor
(1.26)
Fig. 1.5 Schema bloc a sistemului (S) cu subsistemele (Si), cuplate
În Fig. 1.5 se prezintă schema bloc a unui sistem cu 6 subsistem cuplate între ele. Conform relaţiei (1.26) numărul maxim de cuplări este de N max = 6x5=30. Din Fig. 1.5 rezultă însă un număr de numai 9 cuplări dintre subsisteme, fiecărei cuplări corespunzându-i o matrice de cuplare, în conformitate cu relaţia (1.27) a matricei de structură.
(1.27)
6
(S)
(S1)
(S2) (S3) (S4)
(S5) (S6)
x11
x12
x21 x31 x41 x42
x51 x61 x62 x63
y12y11 y13
y21 y22 y23 y31 y41
y51 y61
y62