Analiza dinamica 1999
169
CORNEL MARIN ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE MACARIE TÂRGOVIŞTE 1999
-
Upload
cojocaru-marius -
Category
Documents
-
view
41 -
download
11
Transcript of Analiza dinamica 1999

CORNEL MARIN
ANALIZA DINAMICĂA STRUCTURILORLINIAR ELASTICE
MACARIETÂRGOVIŞTE 1999

dr. ing. Cornel MARIN
ANALIZA DINAMICĂA STRUCTURILORLINIAR ELASTICE
EDITURA MACARIETÂRGOVIŞTE 1999

Descrierea CIP a Bibliotecii NaţionaleMARIN, CORNELAnaliza dinamică a structurilor liniar elastice / CornelMarin. – Târgovişte: Editura Macarie, 1999
165 p.; cm – (Universitaria)Bibliografie.ISBN 973 – 9372 – 59 – 7
539.3:531.3(075.8)
Consilier editorial: Mihail Vlad
Referenţi ştiinţifici:
Prof. dr. ing. Nicolae ENESCUProf. dr. mat. Teodor HUDU
Tehnoredactare computerizată: Marin Cornel
Toate drepturile rezervate autorului.


MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
5
INTRODUCERE
Cercetările actuale în domeniul ananlizei statice şidinamice a unei structuri mecanice au ca scop:• verificarea soluţiilor constructive adoptate de proiectant
din punct de vedere al rezistenţei mecanice, al rigidităţii şial stabilităţii echilibrului elastic al structurii sub acţiuneasarcinilor exterioare de proiectare.
• verificarea soluţiilor constructive din punct de vedere alcomportării dinamice în cazul când structurile mecanicesunt supuse unor acţiuni dinamice (şocuri, vibraţii,cutremure, vânt puternic, etc). Interesează în specialanaliza modurilor proprii de vibraţie ale structurii şi aleansamblului în care funcţionează, modul în care acestevibraţii proprii influenţează funcţionalitateaechipamentului.
• calificarea seismică este o cerinţă specială ce s-a impusodată cu creşterea riscului legat de funţionareaechipamentelor în condiţiile unui cutremur, în moddeosebit ţn cazul centralelor nuclearo-electrice,combinatelor chimice şi petrochimice, de apă grea, etc.
Orice analiză dinamică are două laturi complementare:1. una experimentală, având la bază un algoritm şi metode
specifice de analiză modală;2. una teoretică, legată de rezlovarea ecuaţiilor diferenţiale
ale modelului matematic corespunzător având la bază unalgoritm şi metode specifice de analiză.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
6
Studiul structurilor mecanice supuse unor regimuridinamice de funcţionare este o temă de actualitate dinurmătoarele motive:• echipamentele mecanice complexe care fac obiectul
analizelor teoretice şi experimentale ale unei analizedinamice sunt componente ale oricărei instalaţii industriale,ale centralelor energetice clasice sau nucleare, alecombinatelor chimice, petrochimice, de apă grea, etc.
• pentru majoritatea echipamentelor se iau în calculregimurile seismice de încărcare, care au o probabilitate deproducere destul de ridicată, dat fiind faptul că ţara noastrăeste caracterizată de o activitate seismică ridicată, cu ociclicitate de producere a unui cutremur mediu de cca.5...10 ani şi a unui cutremur major de cca. 30...40 ani;
• literatura tehnică de specialitate nu conţine multe date denatură experimentală privind calificarea seismică aechipamentelor (conform normativelor internaţionale,aceasta este obligatorie în cazul centralelor nuclearo-electrice, de apă grea, a combinatelor chimice ce lucreazăcu substanţe toxice, etc.);
• progresul deosebit înregistrat în ultimii ani în domeniultehnicii de calcul (hardware), în special în domeniulsofturilor de analiză (statică, dinamică, termică, etc),datorat creşterii concurenţei pe piaţa internaţională desoftware; acesta a avut ca efect imediat schimbareaconcepţiei privind proiectarea clasică inginerească (careaşa cum se ştie, constă dintr-un ciclu cu o durată relativmare ce cuprinde: realizarea proiectului, realizarea şitestarea prototipului, optimizarea constructivă pe bazadatelor încercărilor experimentale pe prototip, omologareaprodusului; în contextul concurenţei actuale, alrentabilizării şi scurtării duratei ciclului de proiectare-

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
7
fabricaţie, s-a impus tot mai mult concepţia modernăprivind proiectarea şi realizarea noilor modele şi anume,creerea, testarea şi optimizarea din faza de concepţie aprototipului virtual;
• disponibilitatea pe care şi-au exprimat-o inginerii carelucrează în domeniul proiectării şi fabricaţiei deechipamente pentru asimilarea şi folosirea acestor mijloacemoderne de proiectare şi testare a noilor modele, desimulare a funcţionării pentru diferite regimuri prezumtivede funcţionare pe prototipul virtual, de optimizare şi descurtare a ciclului de fabricaţie al noilor modele;
• interesul deosebit pe care îl prezintă analiza statică şidinamică a structurilor complexe cu multiple grade denedetreminare pentru dezvoltarea şi modernizareaînvăţământul superior tehnic, înlocuirea modelelor de tipbară dreptă, bară curbă, plăci plane sau curbe particulare,cu noi modele tridimensionale cât mai apropiate derealitate, care pot fi analizate static, cinematic, dinamic sautermic cu ajutorul mijloacelor moderne actuale. Este decimomentul pentru schimbarea concepţiei clasice privindcalculele de rezistenţă, vibraţii, stabilitate, etc,
• Posibilităţile multiple oferite astăzi de softuri ca:AUTOCAD, SOLID-WORKS, PRO-ING, CATIA,BENTLEY, etc.- în domeniul modelării solide şi de softurica ANSYS, COSMOS-M, NASTRAN, CADA-X, DADS,DESIGN-WORKS , etc.- în domeniul analizei cu elementefinite, de simulare a diferitelor regimuri statice dinamice şitermice de încărcare, reprezintă o oportunitate deosebităpentru învăţământ şi cercetare şi se aresează atâtcercetătorilor cât şi cadrelor didactice şi studenţilor carevor deveni utilizatorii acestor programe.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
8
Analiza cu elemente finite se bazează pe principiivariaţionale de rezolvare a ecuaţiior diferenţiale cecaracterizează orice fenomen dinamic. Prin minimizareafuncţionalei corespunzătoare ecuaţiilor diferenţiale, impunereacondiţiilor la limită pentru un subdomeniu limitat al structurii(numit generic element finit) şi asamblarea matricilor rezultateprin acest procedeu, rezultă matricea globală a structurii.Rezolvarea ecuaţiei matriciale liniare se face cu ajutorulmetodelor numerice clasice, soluţiile corespunzătoare fiinddeplasările din noduri. Pe baza soluţiilor obţinute, folosindecuaţiile specifice Teoriei elasticităţii se pot calcula apoitensiunile şi deformaţiile corespunzătoare fiecărui element,tensiunile principale, tensiunile echivalente conform uneiteorii de rezistenţă (de exemplu, von Mises).
Analiza modală cuprinde următoarele faze importante:1. Testul experimental propriu-zis (testul set-up)2. Achiziţia de date şi estimarea funcţiei de răspuns în
frecvenţă (FRF);3. Identificarea dinamică a sistemului: determinarea
caracteristicilor dinamice pe baza măsurătorilor intrare-ieşire (input-output);
4. Validarea modelului analitic;5. Utilizarea parametrilor modali determinaţi anterior în
scopul reproiectării, optimizării comportării dinamice asistemelor mecanice sau studiului comportării stucturii înansamblul din care face parte.
6. Ajustarea, corelarea şi corectarea modelului (updating-ul).

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
9
CAPITOLUL IELEMENTE DE TEORIA
VIBRAŢIILOR SISTEMELOR DISCRETE LINIAR-ELASTICE
În acest capitol se face o prezentare sintetică a bazelormatematice ale teoriei vibraţiilor sistemelor materiale liniar-elastice discrete cu mai multe grade de libertate, atât din punctde vedere al analizei modale cât şi al analizei spectrale.Acesta este un caz important, deoarece majoritatea metodelormoderne de identificare şi simulare a comportării dinamice astructurilor liniar-elastice reale, au la bază modelul discret.
Sunt prezentate vibraţiile sistemelor elastice liniareconservative şi cu amortizare, aşa cum sunt ele tratate înliteratura de specialitate [ ] [ ].62,16
1.1. Vibraţiile sistemelor conservativeDeşi în practica inginerească nu se întâlnesc sisteme
perfect conservative, sudiul vibraţiilor acestor sisteme prezintăinteres pentru analiza dinamică a structurilor cu amortizareneglijabilă (şasiuri, cadre, batiuri, etc.) cât şi pentru structurireale cu amortizare “proporţională” al căror răspuns poate fiexprimat în funcţie de modurile proprii de vibraţie alesistemului conservativ asociat.
1.1.1. Vibraţii libereEcuaţiile diferenţiale ale vibraţiilor libere ale unui
sistem conservativ cu N grade de libertate, se exprimă în

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
10
funcţie de coordonatele independente q1, q2......., qN, subforma:
[ ]{ } [ ]{ } { }0=+ qKqM !! (1.1)
unde [M] este matricea maselor şi [K] matricea constantelorelastice (două matrici definite pozitiv, nesingulare şisimetrice, atunci când coordonatele qi definesc deplasărifaţă de o poziţie fixă în spaţiu);[q] , matricea coloană a coordonatelor generalizate.Se caută o soluţie de forma: { } { } ,cos tq ωψ= (1.2)
care reprezintă o vibraţie armonică în care mişcărilecorespunzătoare celor N coordonate sunt sincrone şiechifazice. Înlocuind soluţia (1.2) în (1.1), rezultă sistemul:
[ ] [ ]( ){ } { } ,MK 02 =− ψω (1.3)
adică o problemă de valori proprii asociată matricilor [M] şi[K] (două matrici pătrate N x N). Sistemul (1.3) are soluţiinebanale numai dacă :
det [ ] [ ]( ) 02 =− MK ω (1.4)Relaţia (1.4) este o ecuaţie algebrică de gradul N în ω2,
numită ecuaţia pulsaţiilor. Rădăcinile ei 222
21 ,...,, Nωωω (pentru
cazul când cele N valori sunt distincte şi pozitive) se numescvalori proprii, iar mărimile N,...,, ωωω 21 se numesc pulsaţiiproprii.
Fiecărei valori proprii 2rω îi corespunde un vector
propriu Şψ(r)Ţ, format din elementele reale )r(jψ , care satisface
ecuaţia matricială: [ ] [ ]( ) ( ){ } { }02 =− rr MK ψω (1.5)
şi care defineşte forma unui mod propriu de vibraţie.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
11
Deşi valoarea elementelor este arbitrară, vectorii modalisunt unici ca formă, în sensul că raportul între două elemente
( ) ( )rl
rj , ψψ este constant. “Ajustarea” elementelor vectorilor
proprii pentru a face amplitudinea lor unic determinată, senumeşte normalizare, iar vectorii rezultaţi definesc formamodurilor normale de vibraţie. Aceasta se face în diferitemoduri: ( ) 1=r
maxψ sau ( ){ } [ ] ( ){ } 1=rTr M ψψ , etc. Problema de valoriproprii (1.5) se mai poate scrie sub formele echivalente:
[ ] [ ] ( ){ } ( ){ } ,KM rr
r ψωψ 21 =− (1.5’)
sau: [ ] [ ] ( ){ } ( ){ }r
r
rMK ψω
ψ 21 1
=− (1.5”)
Rezultă că vectorii proprii la dreapta matricii [M]-1 [K]şi vectorii proprii la dreapta matricii inverse [K]-1 [M] suntidentici, iar valorile proprii corespunzătoare sunt inverse(datorită simetriei matricilor [M] şi [K]).
Între vectorii proprii [ψ(r) şi matricile [M] şi [K] existăurmătoarele relaţii de ortogonalitate:
( ){ } [ ] ( ){ } ( )sr,M rTs ≠= 0ψψ (1.6)( ){ } [ ] ( ){ } ( )sr,K rTs ≠= 0ψψ (1.7)
În aceste relaţii [M] şi [K] joacă rolul de matrici de ponderare.Dacă se notează:
( ){ } [ ] ( ){ } ,Mm rTrr ψψ= (1.8)
( ){ } [ ] ( ){ } ,Kk rTrr ψψ= (1.9)
ecuaţia (1.5) devine: 02 =− rrr mk ω (1.10)unde: kr este constanta elastică generalizatăcorespunzătoare modului de vibraţie r (constanta

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
12
elastică modală), iar mr este masa generalizată amodului r (masa modală ).
Rezultă: ( ){ } [ ] ( ){ }( ){ } [ ] ( ){ }rTr
rTr
r
rr
MK
mk
ψψψψω ==2 (1.11)
Se consideră următoarea matrice pătrată, având dreptcoloane vectorii proprii Şψ(r)Ţ, numită matricea modală:
[ ] ( ){ } ( ){ } ( ){ } ( ){ }[ ]Nr ........ ψψψψΨ 21= (1.12)
şi matricea diagonală având ca elemente valorile proprii,numită matricea spectrală:
[ ] [ ] ,diag rD
r22 ωω = (1.13)
atunci ecuaţiile (1.5) se scriu sub forma:
[ ][ ] [ ][ ] [ ] [ ]02 =−D
rMK ωΨΨ . (1.14)
1.1.2. Vibraţii forţate ale sistemelor conservative
Ecuaţiile vibraţiilor forţate ale sistemului conservativ cuN grade de libertate se scriu sub forma :
[ ]{ } [ ]{ } { } ,fqKqM =+!! (1.15)unde { }f este vectorul excitaţiei. Întrucât matricele [M] şi [K] nu sunt simultan
diagonale, în vederea decuplării ecuaţiilor (1.15), se foloseştetransformarea liniară de coordonate:
{ } [ ]{ }pq ψ= (1.16)
care se mai scrie sub forma: { } ( ){ } r
N
r
r pq ⋅=∑=1ψ (1.16’)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
13
Această transformare de coordonate principaleneamortizate pr exprimă vectorul { }q ca o combinaţie liniarăîntre vectorii proprii ( ){ }rψ .
Înlocuind (1.16) în (1.15) şi înmulţind la stânga cu [ ] ,TΨrezultă:
[ ] [ ][ ] { } [ ] [ ][ ] { } [ ] { }fpKpM TTT ΨΨΨΨΨ =+!! (1.17)
Ecuaţia corespunzătoare coordonatei principale pr seobţine înlocuind (1.16’) în (1.15), folosind relaţiile deortogonalitate (1.6) şi (1.7):
( ){ } [ ] ( ){ } ( ){ } [ ] ( ){ } ( ){ } { }fpKpM Trr
rTrr
rTr ψψψψψ =+!! (1.18)
Folosind relaţiile (1.8) şi (1.9), ecuaţia (1.18) devine:
,rrrrr Fpkpm =+!! (1.19)
unde: cu r = 1, 2, ..., N , s-au notat modurile de vibraţie;Fr - forţa generalizată (forţa modală) corespunzătoaremodului r: ( ){ } { } .fF Tr
r ψ= (1.20)
Dacă se introduc următoarele matrici:
• matricea diagonală a maselor modale:
[ ] [ ] [ ][ ] [ ] ,mdiagMm rTD == ΨΨ (1.21)
• matricea diagonală a constantelor elastice modale:
[ ] [ ] [ ][ ] [ ]rTD kdiagKk == ΨΨ (1.22)
• şi matricea coloană a forţelor modale:
{ } [ ] { } ,fF TΨ= (1.23)
atunci sistemul (1.17) devine:
[ ] { } [ ] { } { } ,Fpkpm DD =+!! (1.17’)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
14
şi reprezintă un sistem de N ecuaţii decuplate (1.19), care serezolvă la fel ca în cazul unui sistem cu un grad de libertate.
În cazul unei excitaţii armonice { } { } ,eff tiω= soluţiastaţionară este de forma { } { } tieqq ωˆ= şi ecuaţia (1.17’) devine:
[ ] [ ] { } [ ] { } ,fq)km TDD Ψω =+ (- 2 (1.17”)
Dacă se foloseşte transformarea:
{ } [ ]{ } ( ){ }∑=
=Ψ=N
rr
r ppq1
ˆˆˆ ψ ,
ecuaţia (1.17”) se scrie: { } { },ˆˆ)m (- )(r
2 fpk Trrr ψω =+
Rezultă: ( ){ } { }
rr
Tr
r mkfp 2ω
ψ−
= , deci:
{ }( ){ } { } ( ){ }( ) .
mfq
N
r rr
rTr
∑= −
=1
22 ωωψψ (1.24)
Deşi modurile proprii de vibraţie ( ){ }rψ ale unui sistemconservativ, pentru anumite condiţii iniţiale, pot apărea şi înabsenţa unei solicitări exterioare, este posibil ca ele să aparăindiferent de condiţiile iniţiale, dacă sistemul este acţionat deo excitaţie sau un mod propriu de solicitare, denumit modprincipal de excitaţie sau de solicitare.
Un mod principal de solicitare defineşte deci distribuţiaforţelor capabile să întreţină vibraţia într-un anumit modpropriu.
Fie excitaţia armonică { } ( ){ } tir eˆf ωℑ= care producerăspunsul armonic corespunzător modului propriu de vibraţier: { } ( ){ } tir eq ωψ= ;
Din relaţia (1.16’) rezultă { } { } ,eIp tir
ω= unde { } rI estecoloana r a matricii unitate [ ]I , iar ecuaţia (1.15) devine:

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
15
( ){ } [ ] ( ){ } ,MK.ˆ rr ψω2−=ℑ (1.25)definind modul principal de solicitare de ordinul r .
Înmulţind ecuaţia (1.25) la stînga cu { } Ts)(ψ conformrelaţiilor de ortogonalitate (1.6) şi (1.7), rezultă:
{ } ( ){ } 0ˆ)( =ℑ rTsψ
deci lucrul mecanic efectuat de forţele corespunzătoare unuimod principal de solicitare pe deplasările corespunzătoarealtor moduri de vibraţie este nul.
Analog, folosind relaţiile (1.8) şi (1.9) şi înmulţindecuaţia (1.25) la stânga cu { } Tr )(ψ se obţine:
{ } ( ){ }
−=−=ℑ 2
22 1
rr
rr
rT)r( kmk.ˆωωωψ
care pentru ω≠ωr este diferit de zero.
1.2. Vibraţiile forţate ale sistemeloramortizate cu n grade de libertate
1.2.1. Ipoteze asupra amortizăriiEcuaţiile vibraţiilor forţate ale unui sistem cu n grade de
libertate cu amortizare vâscoasă liniară se scriu sub forma:[ ]{ } [ ]{ } [ ]{ } { }fqKqCqM =++ !!! (1.26)
unde: [C] este matricea coeficienţilor de amortizare vâscoasă,denumită prescurtat matricea amortizării.Se vaconsidera că [C] este reală, simetrică şi definită pozitiv.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
16
Prin transformarea de coordonate principale (1.16) şiînmulţind la stânga cu [Ψ]T se obţine sistemul:
[ ] [ ][ ] { } [ ] [ ][ ] { } [ ] [ ][ ] { } [ ] { }fpKpCpM TTTT ΨΨΨΨΨΨΨ =++ !!! (1.27)
Folosind notaţiile (1.21) , (1.22) precum şi notaţia:
[ ] [ ] [ ][ ]ΨΨ Cc T= (1.28)
sistemul (1.27) devine:
[ ] { } [ ]{ } [ ] { } { }Fpk`pcpm` DD =++ !!! (1.29)
Se deosebesc două cazuri:a) dacă matricea [c] nu este diagonală, amortizarea vâscoasă
se numeşte neproporţională (neortogonală sau neclasică). Prima ecuaţie diferenţială a sistemului (1.29) se scrie:
∑=
=+++N
rrr Fpkpcpcpm
2111111111 !!!! (1.30)
Termenul al treilea din membrul stâng indică o cuplareîntre modurile proprii de vibraţie datorită amortizării. Înacest caz se pot defini pulsaţiile proprii complexe,respectiv formele proprii de vibraţie complexe (veziparagraful 1.2.3).
b) dacă matricea [c] este diagonală, amortizarea vâscoasă senumeşte proporţională (ortogonală sau clasică). În acestcaz, făcând notaţia:
[ ] [ ]rD cdiagc` = (1.31)
sistemul (1.29) devine:
[ ] { } [ ] { } [ ] { } { }Fpkpcpm DDD =++ ``` !!! (1.32)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
17
şi modurile de vibraţie se decuplează; prima ecuaţie asistemulul (1.32) are forma:
1111111 Fpkpcpm =++ !!! (1.33)
ecuaţie care poate fi rezolvată independent de celelalte.
Observaţii1. Denumirea de amortizare proporţională provine de la oobservaţie a lui Raleigh, care a exprimat matricea [ ]C ca ocombinaţie liniară a matricilor [ ]M şi [ ]K :
[ ] [ ] [ ]KMC τσ += (1.34)
unde τ şi σ sunt doi factori de proporţionalitate
În acest caz matricea [ ] [ ][ ]ΨΨ CT este o matrice diagonală; într-adevăr avem:
[ ] [ ][ ] [ ] [ ][ ] [ ] [ ][ ] [ ] [ ] [ ] DDDTTT c`k`m`KMC =+=+= τσΨΨτΨΨσΨΨ
2. Amortizarea proporţională nu se limitaeză la aceast caz (acombinaţiei liniare a matricilor masei şi rigidităţii). S-ademonstrat că dacă matricea amortizării [C] poate fi exprimatăca o funcţie polinomială de [M] şi/sau de [K], atunci matriceamodală [Ψ] diagonalizează matricea [C] în acelaşi mod în carediagonalizează matricile [M] şi [K], dacă este îndeplinităcondiţia ca [Ψ] să fie matrice ortogonală, adică:
[ ] [ ] [ ]IT =ΨΨ
3. Condiţia cea mai generală, necesară şi suficientă, pentrudecuplarea ecuaţiilor (4.26) prin transformarea (1.16) esteconform [62]:
[ ][ ] [ ] [ ][ ] [ ] .CMKKMC 11 −− =

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
18
În practică, alegerea ipotezei amortizării proporţionalenu se face verificând respectarea unei condiţii atât decomplicate, ci mai simplu, neglijând termenii nediagonali aimatricei amortizării, sau cuplajele intermodale produse deamortizări.
1.2.2. Moduri reale “clasice” de vibraţieDacă matricea amortizării este diagonalizată de aceeaşi
transformare de coordonate (1.16) care decuplează sistemul(1.15), răspunsul unui sistem amortizat se poate exprima înfuncţie de modurile de vibraţie ( ){ }rψ ale sistemuluineamortizat asociat, numite moduri reale “clasice” devibraţie.
1.2.2.1. Amortizarea vâscoasăÎn cazul amortizării vâscoase proporţionale, se stabileşte
următoarea relaţie de ortogonalitate:( ){ } [ ] ( ){ } ( )sr ≠= 0rTs C ψψ (1.35)
şi se notează cu cr coeficientul de amortizare vâscoasămodală:
( ){ } [ ] ( ){ } rrTr cC =ψψ (1.36)
Într-un regim armonic staţionar, dacă:
{ } { } { } { } ,eq~,eff titi ωω == q (1.37)
ecuaţia (1.26) devine:
[ ] [ ] [ ]( ){ } { }.fq~KCiM =++− ωω2 (1.38)
Cu transformarea de coordonate principale complexe:
{ } [ ]{ } ( ){ }∑== rr p~p~q~ ψΨ (1.39)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
19
şi înmulţind ecuaţia (1.38) la stînga cu [ ]TΨ , folosind relaţiile(1.6) ... (1.10), (1.35) şi (1.36) se determină coordonataprincipală complexă:
( ){ } { }( )22 2 rrrr
Tr
r imfp~
ωωωζωψ
++−= (1.40)
unde:rr
rr m
cω
ζ2
= (1.41)
este raportul de amortizare corespunzător modului r.Rezultă:
{ }( ){ } { } ( ){ }
( )∑= ++−
=N
r rrr
rTr
imfq~
122 2 ωζωωω
ψψ (1.42)
1.2.2.2. Amortizarea histereticăEcuaţiile vibraţiilor forţate ale unui sistem liniar cu
amortizare histeretică se pot scrie sub forma:
[ ]{ } [ ]{ } [ ]{ } { } ,fqKqHqM =++ !!!ω1 (1.43)
unde [H] este matricea coeficienţilor de amortizarehisteretică (reală, pozitiv definită şi simetrică).În cazul amortizării histeretice proporţionale, se poate
stabili relaţia de ortogonalitate:( ){ } [ ] ( ){ } s)(r ≠= .H rTs 0ψψ (1.44)
Se notează prin hr coeficientul de amortizare histerezicăcorespunzător modului r:
( ){ } [ ] ( ){ } rrTr hH =ψψ (1.45)
Pentru o forţă armonică: { } { } tieff ω= (1.46)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
20
deplasarea în regim staţionar este:{ } { } tieq~q ω= (1.47)
deci sistemul (1.43) devine:
[ ] [ ] [ ] { } { }fq~)KHiM( =++− 2ω (1.48)
Aplicând transformarea de coordonate principale (1.39):
{ } [ ]{ } { }∑=
==N
rr
)r( p~p~q~1ψψ
sistemul de ecuaţii (1.48), se decuplează şi devine:
[ ] [ ] [ ] { } ( ){ } { } { }Ffp~)khim( TrDDD ==++− ψω2 (1.49)
unde: [ ] [ ]rD hdiagh = (1.50)
Ecuaţia r a acestui sistem se scrie:
( ) rrrrr Fp~ihmk =+− 2ω r-1, 2, 3, ... N (1.51)
deci coordonata modală complexă rp~ este:( ){ } { } .
ihmkfp~
rrr
Tr
r +−= 2ω
ψ (1.52)
Rezultă că vectorul amplitudinilor complexe aledeplasărilor este dat de relaţia:
{ }( ){ } { } ( ){ } ,
igk
fqN
rr
rr
rTr
∑=
+−
=1
2
2
1ωω
ψψ (1.53)
unde: cu gr s-a notat factorul de amortizare histerezicăcorespunzător modului r :
rrr k/hg = (1.54)
În cazul metodelor de identificare a sistemelormecanice cu excitaţie într-un punct , interesează răspunsul pe

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
21
direcţia coordonatei qj produs de o forţă armonică aplicatădupă direcţia coordonatei ql . Din expresia (1.53) se obţine:
( ) ( )
.1
~~
ˆ~~
1
ˆ~
1 12
2
2
2∑ ∑= =
+−
=
+−
=N
r
N
rr
rr
r
jl
r
l
rr
r
rjl
rl
j
igk
pq
fpq
igk
fq
ωω
∂∂
∂∂
ωω
ψψ (1.55)
Rezultă aşadar receptanţa (de transfer) complexă:( ) ( ) ( ) ( )
∑∑=
−
=
=
+−
==N
r
ir
rr
rj
rl
N
rr
rr
rj
rl
l
jjl
resingk
igkfq~
112
2
1
ψψψψ
ωωψψ
α (1.56)
unde s-a notat : .garctg
r
rr
2
2
1ωω
ψ−
= (1.57)
La acelaşi expresie a receptanţei complexe, se poateajunge folosind metoda răspunsului în frecvenţe.
Ecuaţia (1.48) se mai scrie:
[ ]{ } { },fq~ =β (1.48’)
unde s-a notat cu [ ]β matricea obstructanţelorcomplexe (sau matricea constantelor elasticedinamice):[ ] [ ] [ ] [ ][ ]KHiM ++−= 2ωβ (1.58)
Matricea receptanţelor sau matricea coeficienţilor deinfluenţă dinamici complecşi este:
[ ] [ ] [ ] [ ] [ ][ ] ,KHiM 121 −− ++−== ωβα (1.59)
având elemente de forma: .fq~
l
jjl ∂
∂α = (1.60)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
22
Aplicând transformarea de coordonate principale (1.39),ecuaţia (1.48’) devine :
[ ][ ]{ } { }.fp~ =ψβ (1.61)
După înmulţirea ecuaţiei (1.61) la stânga cu [ ]TΨ seobţine sistemul decuplat:
[ ] { } [ ] { },fp~ TDr Ψβ = (1.62)
unde:
[ ] [ ] [ ][ ] [ ] [ ] [ ] [ ]rDDDT
r diag)khim( βωΨβΨβ =++−== 2 (1.63)
iar obstructanţa modală complexă corespunzătoare modului reste:
.ihmk rrrr +−= 2ωβ (1.64)
Receptanţa modală complexă este inversa obstructanţeimodale complexe:
r
ir
rr
rr
r hesin
igk
rψψ
ωωβ
α−⋅=
+−
==
2
2
1
11 (1.65)
şi matricea diagonală corespunzătoare:
[ ] [ ] [ ] .diag Drr
Dr
1−== βαα (1.66)
Prin inversarea relaţiei (1.63) se obţine:
[ ] [ ] [ ] [ ] TDr
−−−−= ΨβΨβ 111
(1.67)
sau cu notaţiile (1.59) şi (1.66):
[ ] [ ] [ ] [ ] ,TDr
−−−−= ΨαΨα 111 (1.68)
care prin înmulţire la stânga cu [ ]Ψ şi la dreapta cu [ ]Ψ T,devine: [ ][ ] [ ] [ ]αΨαΨ =TD
r (1.69)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
23
Coloana " a matricei [ ]α reprezintă vectorulrăspunsului la o forţă aplicată după coordonata " :
{ } [ ][ ] { } [ ]{ } ,lrlD
rl ψαΨψαΨα == (1.70)
unde { } lψ este un vector care conţine elementul " alfiecărui mod propriu.
Rezultă: ( ) ( )∑=
⋅⋅=N
rr
rl
rjjl ,
1αψψα (1.71)
avînd expresia identică cu (1.56).În continuare, se fac următoarele notaţii :
( ) ( ) ,
g
g,g
a
rr
r
rr
rr
22
2
222
2
2
2
11
1
+
−
−=+
−
−=
ωω
ω
ωω
ωω
ω rb (1.72)
( ) ( ) ( ) ( ),bg,agA rrrrr ωωωω ⋅=⋅= rB (1.73)
( )( ) ( )
,gk
Xrr
rj
rlr
jl
ψψ= (1.74)
( )( ) ( )
.kr
rj
rlr
jl
ψψχ = (1.75)
Dacă se separă părţile reale şi imaginare alereceptanţelor complexe, expresia (1.56) sau (1.71) se maiscrie:
( ) ( ) ( )( ) ( )
( ) ( )[ ]∑=
+=+=N
rrr
r
rj
rl
jljljl ibak
i1
ImReωω
ψψωαωαωα (1.76)
deci cu notaţiile de mai sus se poate scrie:
( ) ( ) ( ) ( ) ( )∑∑==
Χ==N
rr
rjl
N
rr
rjljl Aa
11Re .ωωχωα (1.77)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
24
( ) ( ) ( ) ( ) ( )∑∑==
Χ==N
rr
rjl
N
rr
rjljl Bb
11Im .ωωχωα (1.78)
Cu ajutorul acestora se formează matricele coloană:
( ){ } ( ){ } ( ) [ ] ( ){ } [ ] ( ){ }∑=
===N
rr
rll AXaa
1Re ωωχωχωα (1.79)
( ){ } ( ){ } ( ) [ ] ( ){ } [ ] ( ){ }∑=
===N
rr
rll BXbb
1Im ωωχωχωα (1.80)
unde:
[ ] ( ){ } ( ){ } ( ){ }[ ]Nllll χχχχ ... 21= (1.81)
( ){ } ( ) ( ) ( ){ }( ){ } ( ) ( ) ( ){ } T
N
TN
bbbb
aaaa
ωωωω
ωωωω
...
...
21
21
=
= (1.82)
( ){ } { }( ){ } { } T
Nljllll
TNljllll
ImImIm2Im1Im
ReReRe2Re1Re
......
......
ααααωα
ααααωα
=
= (1.83)
[ ] ( ){ } ( ){ } ( ){ }[ ]Nllll XXXX ... 21= (1.84)
1.2.3. Moduri complexe de vibraţiePentru răspunsul unei structuri liniare cu amortizare
neproporţională se poate da o reprezentare modală cu ajutorulteoriei modurilor complexe de vibraţie. O formulare generalăa problemei se poate face pe baza aşa numitelor “matricilambda” [39]. Astfel în cazul vibraţiilor libere ale unui sistemcu amortizare vâscoasă, înlocuind în sistemul ecuaţiilor demişcare (1.26) o soluţie de forma:
( ){ } { } teytq λ= (1.85)
se obţine un sistem de N ecuaţii algebrice omogene,reprezentând următoarea problemă de valori proprii:

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
25
[ ] [ ] [ ]( ){ } { } .yKCM 02 =++ λλ (1.86)
unde [ ] [ ] [ ] [ ]KCM ++= λλΓ 2 se numeşte matrice lambda.
Sistemul (1.86) admite soluţii nebanale dacădeterminantul matricei lambda se anulează:
[ ] [ ] [ ]( ) .KCMdet 02 =++ λλ (1.87)
Ecuaţia caracteristică (1.87) este o ecuaţie algebrică deordinul 2N în λ. Rădăcinile ei pot fi reale negative, purimaginare sau complex conjugate.
Rădăcinile reale negative corespund unui sistem deamortizare supracritică, având o mişcare neperiodică deamplitudine descrescătoare. Rădăcinile pur imaginare suntconjugate şi corespund sistemelor neamortizate.
Interesează cazul rădăcinilor complexe conjugate, cupartea reală negativă (sisteme stabile), care corespundsistemelor cu amortizare subcritică, având o mişcareperiodică, cu amplitudinea descrescătoare.
Fiecărei valori proprii λr îi corespunde deci un vectormodal ( ){ }ry având elementele complexe, care defineşte unmod complex de vibraţie. Valorile proprii fiind complexconjugate, rezultă că vectorii modali trebuie să fie deasemenea complex conjugaţi. O pereche de vectori modalicomplex conjugaţi, multiplicaţi cu funcţii exponenţialedependente de timp, pot fi combinaţi pentru a rezulta ocantitate reală, descriind astfel o mişcare oscilatorieamortizată.
Soluţia generală a ecuaţiei omogene (1.26) se poatescrie ca o combinaţie liniară a soluţiilor de forma ( ){ } tr rey λ
înmulţite cu constante arbitrare γr (reale sau complexe) astfel:( ){ } [ ]{ }treytq λγ= (1.88)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
26
unde: matricea modală:[ ] ( ){ } ( ){ } ( ){ } ( ){ }[ ]Ny...yyyy 2321= (1.89)
iar { }treλγ este o coloană de elemente ce joacă rolul decoordonate principale amortizate.În cazul amortizării histeretice, reprezentarea modală
conţine doar N vectori modali, calculele fiind considerabilsimplificate.
Un mod complex de vibraţie are caracterul unei undeprogresive în lungul structurii (spre deosebire de caracterul deundă staţionară al modurilor reale clasice), deoarece fiecareelement complex al vectorilor modali are altă fază, decicoordonata corespunzătoare atinge elongaţia maximă la unmoment diferit de celelalte. Modurile complexe sunt mai greude măsurat direct (experimental), deoarece mişcarea deşi estesincronă nu este echifazică.
“Nodurile” de vibraţie îşi schimbă continuu poziţia întimpul unui ciclu de vibraţie, dar secvenţa în carecoordonatele ating valoarea maximă rămâne aceeaşi pentrufiecare ciclu, astfel că la începutul fiecărui ciclu poziţiilerelative sunt aceleaşi ca la începutul ciclului anterior. În cazulvibraţiilor libere, elongaţiile maxime descresc exponenţial dela un ciclu la altul, spre deosebire de mişcarea liberă asistemelor neamortizate, la care modurile sunt staţionare iarelongaţiile maxime nu scad în timp.
1.2.3.1. Cazul amortizării vâscoaseDeşi teoria generală a vibraţiilor sistemelor cu
amortizare neproporţională foloseşte transformata Laplace şi

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
27
matricea lambda, în continuare se va utiliza metoda propusăde Frazer, Duncan şi Collar [23]. Fie ecuaţia de mişcare a unui sistem cu amortizarevâscoasă:
[ ]{ } [ ]{ } [ ]{ } { } ,fqKqCqM =++ !!! (1.90)
unde [C] este o matrice simetrică.Adăogând ecuaţiei (1.90) identitatea:[ ]{ } [ ]{ } { } ,qMqM 0=− !! (1.91)
se obţine un sistem de 2N ecuaţii diferenţiale de ordinul unu:[ ]{ } [ ]{ } { } ,SxVxU =+! (1.92)
în care: [ ] [ ] [ ][ ] [ ] [ ] [ ] [ ]
[ ] [ ] ,K
M,
CMM
U
−=
=
000
V (1.93)
sunt matrici pătrate, reale, simetrice, de ordinul 2N,iar matricile:
{ } { }{ } { } { }
{ }
=
=fq
qx
0S ,
! (1.94)
sunt două matrici coloană cu câte 2N elemente.Ecuaţia (1.92) se poate rezolva cu metode similare celor
utilizate la analiza sistemelor neamortizate.a) Vibraţii libere cu amortizare vâscoasăFie ecuaţia omogenă corespunzătoare ecuaţiei (1.92) :[ ]{ } [ ]{ } { } .xVxU 0=+! (1.95)
Se caută o soluţie de forma: { } { } tex σξ= (1.96)
unde { }ξ este un vector cu 2N elemente constante.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
28
Înlocuind (1.96) în (1.95) se ajunge la problema devalori proprii:
[ ] [ ] { } { }0=+ ξσ )VU( (1.97)
Dacă matricea [V] este nesingulară, se multiplicăecuaţia (1.97) la stânga cu [V]-1, rezultând forma cunoscută:
[ ] [ ] { } 01 =
− ξ
σID , (1.98)
unde: [ ] [ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
−−
=−= −−−
CKMKI
UVD 111 0 (1.99)
joacă rolul unei matrice dinamice.Sistemul (1.98) are soluţii nebanale dacă
[ ] [ ] .IDdet 01 =
−
σ (1.100)
Soluţiile acestei ecuaţii caracteristice de ordinul 2N în( r/σ1 ), sunt tocmai valorile proprii ( r/σ1 ) ale problemei (r=1,2, 3, ..., 2N ). Se consideră că cele 2N valori proprii suntdistincte. Fiecărei valori proprii r/σ1 îi corespunde vectorulpropriu ( ){ }rξ cu 2N elemente, care satisface ecuaţia:
[ ] [ ] { } { } .01 )( =
− r
r
ID ξσ
sau: [ ] [ ]( ) ( ){ } 0=+ rr VU ξσ (1.101)
Între vectorii proprii ( ){ }rξ şi matricele [U] şi [V] sestabilesc următoarele relaţii de ortogonalitate:
( ){ } [ ]{ } ,U )r(Ts 0=ξξ rs ≠ (1.102)( ){ } [ ]{ } .V )r(Ts 0=ξξ rs ≠
Dacă se notează:

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
29
( ){ } [ ]{ } ,uU r)r(Tr =ξξ (1.103)
( ){ } [ ]{ } ,vV r)r(Tr =ξξ
ecuaţia de valori proprii (1.101) devine:0=+ rrr vuσ (1.104)
Vectorii proprii ( ){ }rξ sunt matricile coloane cu 2N elemente:
( ){ }( ){ }
( ){ } ,
= r
rrr
qqσ
ξ (1.105)
unde ( ){ }rq este un vector format din N elemente şireprezintă jumătatea inferioară a lui ( ){ }rξ .
La sisteme stabile, pentru moduri cu amortizaresubcritică, pulsaţia σr este complexă şi se exprimă de obiceisub forma:
rrr in µσ +−= (1.106)
unde: nr este un factor de amortizare iar µr estepseudopulsaţia.Se definesc următoarele mărimi:
• raportul de amortizare:
22
22
rr
r
r
rr
nnnµω
τ+
== (1.107)
• pulsaţia de rezonanţă:
.n rrr22 µω += (1.108)
b) Vibraţii forţate cu amortizare vâscoasă

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
30
În vederea decuplării ecuaţiilor (1.92) se foloseştetransformarea liniară:
{ } [ ]{ } ( ){ } r
N
r
r zzx ∑=
==2
1ξξ (1.109)
unde: zr joacă rolul de coordonate principale,iar matricea modală:[ ] ( ){ } ( ){ } ( ){ }[ ].... N221 ξξξξ = (1.110)
Înlocuind (1.109) în ecuaţiile (1.92) şi înmulţind lastânga cu [ ]Tξ rezultă sistemul de ecuaţii decuplate:
[ ] { } [ ] { } { }Rzvzu DD =+! (1.111)
în care s-a notat, folosind relaţiile (1.103):[ ] [ ][ ] [ ] [ ] ,udiaguU r
DT ==ξξ (1.112)
[ ] [ ][ ] [ ] [ ] ,vdiagvV rDT ==ξξ (1.113)
[ ] { } { } .RST =ξ (1.114)
Ecuaţia r a sistemului (1.111) se scrie:
rrrrr Rzvzu =+! (1.115)
sau pe baza relaţiei (1.104) , aceasta devine:
.uRzz
r
rrrr =−σ! (1.116)
Presupunând condiţiile iniţiale nule, soluţia ecuaţiei(1.116) se poate scrie sub forma integralei de convoluţie:
( ) ( ) ( )∫ −=t
tr
rr .deR
utz r
0
1 ττ τσ (1.117)
În cazul excitaţiei armonice, considerând regimulstaţionar:

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
31
( ){ } { } ( ){ } { } ,eq~,eftf titi ωω == tq (1.118)
şi notând: ( ){ } { } ( ){ } { } ,eS,ex~tx titi ωω == tS (1.119)
respectiv: ( ){ } { } ( ){ } { } .eR~,ez~tz titi ωω == tR (1.120)
Dacă se înlocuiesc soluţiile de forma (1.120) în ecuaţia(1.116), rezultă:
( )rr
rr iu
R~z~σω−
= (1.121)
sau folosind (1.114) rezultă: ( ){ } { }( ) .iu
Sz~rr
Tr
r σωξ
−= (1.122)
Înlocuind (1.121) în (1.109) şi ţinând seama de (1.118)se obţine:
{ }( ){ } ( ){ }( ) { } .Siu
xN
r rr
Trr
∑= −
=2
1 σωξξ (1.123)
Din (1.94), pe baza notaţiilor (1.118) şi (1.119),rezultă:
{ }{ }
( ){ } ( ){ }( )
{ }{ }∑
=
−=
N
r rr
Trr
,fiuq~
q~i 2
1
0σω
ξξω sau (1.123)
{ }{ }
( ){ }( )
{ }{ }
( ){ }∑=
−=
N
r
r
rr
Tr
fiuq~q~i 2
1
0ξ
σωξω (1.124)
iar pe baza relaţiei (1.105) se obţine:
{ }( ){ } { }( )
( ){ }.ˆ~ 2
1∑= −
=N
r
r
rr
Tr
qiu
fqqσω
(1.125)
În cazul excitaţiei într-un singur punct " , receptanţa detransfer în punctul j are expresia :
( ) ( )
( )∑= −
==N
r rr
rj
rl
l
jjl iu
qqfq~ 2
1 σωα (1.126)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
32
sau:( )
( )∑= −
=N
r r
rjl
jl i
2
1 σωδ
α (1.127)
unde s-a notat: ( ) .uqq
r
rj
rl
jlr =δ (1.128)
Având în vedere că la sisteme amortizate subcriticvalorile proprii σr şi vectorii modali ( ){ }rq apar în perechicomplex conjugate, expresia (1.126) se mai scrie ca o sumă deN termeni:
( ) ( )
∑=
−−
−=
N
r r
*rjl
r
rjl
jl *ii1 σωδ
σωδ
α (1.129)
unde σ*r şi δjl(r)* sunt conjugatele complexe ale lui σr
şi respectiv δjl(r).
1.2.3.2. Cazul amortizării histereziceSe consideră ecuaţiile de mişcare (1.48) ale unui sistem
cu amortizare histerezică, solicitat de o forţă armonică:
[ ] [ ]( ){ } { },fq~iHKM =++− 2ω (1.130)
unde: [M] şi [K+iH] sunt matrici simetrice, de ordinul N,Şq~Ţ este vectorul amplitudinilor complexe aledeplasărilor
iar { }f - vectorul real al excitaţiei.
Notând ω2=λ, se consideră ecuaţia omogenăcorespunzătoare:
[ ] [ ]( ){ } { } .0~ =−+ qMiHK λ (1.131)
Aceasta are soluţii nebanale dacă:[ ] [ ]( ) .MiHKdet 0=−+ λ (1.132)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
33
Se poate demonstra că există un sistem de N valoriproprii complexe rλ , soluţii ale ecuaţiei (1.189) şi N vectoriproprii complex asociaţi ( ){ },w r care satisfac ecuaţia omogenă(1.131): [ ] [ ]( ) ( ){ } 0=−+ r
r wMiHK λ (1.133)
În continuare, se presupune că cele N valori proprii suntdistincte, iar vectorii modali corespunzători sunt liniarindependenţi. Vectorii modali satisfac condiţiile deortogonalitate:
( ){ } [ ] ( ){ } s)(r ≠= ,wMw rTs 0 (1.134)( ){ } [ ] ( ){ } s)(r ≠=+ ,wiHKw rTs 0 (1.135)
şi relaţiile:( ){ } [ ] ( ){ } ,MwMw r
rTr = (1.136)( ){ } [ ] ( ){ } .KwiHKw r
rTr =+ (1.137)
unde rM şi rK sunt masa modală, respectiv constantaelastică modală complexă.Deoarece cei N vectori proprii sunt liniar independenţi,
orice vector { }~q poate fi exprimat în spaţiul vectorilor proprii( ){ }w r sub forma combinaţiei liniare:
{ } ( ){ } [ ]{ } .pwpwq~N
rr
r ==∑=1
(1.138)
Înlocuind (1.138) în ecuaţia (1.130) şi folosind relaţiile(1.134) - (1.137), rezultă:
( ){ } { } .MKfwp
N
r rr
Tr
r ∑= −
=1
2ω (1.139)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
34
Prin urmare, soluţia ecuaţiei (1.130) este :
{ }( ){ } { } ( ){ }( ) .
Mwfwq~
N
r rr
rTr
∑= −
=1
2ωλ (1.140)
unde: ( )rrr
rr ig
MK +== 12ωλ (1.141)
ωr este pulsaţia de rezonanţăgr factorul de amortizare histerezică corespunzătoaremodului r.În cazul excitaţiei într-un singur punct, receptanţa de
transfer complexă are expresia:( ) ( )
∑=
+−
==N
rr
rrr
rj
rl
l
jjl
igM
wwfq~
12
22 1
ωωω
α (1.142)
Se notează:( ) ( )
( ) ( ) ,iyxM
ww rj
rj
rr
rj
rl +=2ω
(1.143)
deci expresia (1.142) devine:( ) ( ) ( ) ( )( )
∑=
∑=
+−
Ψ−+=
+−
+=
N
r
N
rrg
r
rierjiyr
jx
rigr
rjiyr
jxjl 1 1 2
2
212
21
ω
ωω
ωα (1.144)
unde:
.garctg
r
rr
2
2
1ωω
ψ−
= (1.145)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
35
CAPITOLUL 2IDENTIFICAREA DINAMICĂ A
SISTEMELOR MECANICE
2.1.GeneralităţiPrin identificarea dinamică a unui sistem mecanic se
înţelege creerea modelului analitic pe baza datelorexperimentale obţinute prin măsurători efectuate pe structurareală supusă unui test dinamic.
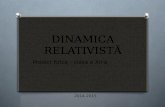
O prezentare generală a metodelor de identificaredinamică a sistemelor mecanice este prezentată schematic înfigura 2.1.
Excita]ieimpus\
Sistem real
R\spunsulsistemului
real
Modificareamodelului
Compara]ieR\spunsulmodelului
Modelulanalitic
Excita]ieimpus\
Figura 2.1

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
36
Asupra sistemului real se aplică o solicitare cunoscutăsau excitaţie, care poate fi periodică, tranzitorie sau aleatoareşi se măsoară răspunsul sistemului real în următoarelemoduri:
• în domeniul timpului - obţinându-se vibrograme saucorelograme, care descriu în timp răspunsul dinamic alsistemului;
• în domeniul frecvenţelor - obţinându-se funcţiile derăspuns în frecvenţă sau spectrogramele, care descriu înfrecvenţe răspunsul dinamic al sistemului (fig. 2.2).
Identificarea pe baza rezultatelorexperimentale pe modelul real
Model fizic Model modal Model fizic
Complet
Identificaredirect\
Optimizareaiterativ\ a
parametrilor
Identificare`n domeniul
timpului
Identificare`n domeniulfrecven]elor
Incomplet
Optimizareaiterativ\ a
parametrilor
Identificaredirect\
Identificaredirect\
Identificarea cuoptimizareaparametrilor
Figura 2.2Modelarea analitică s-a dezvoltat foarte mult în ultimul
timp, în special datorită creşterii capacităţii calculatoarelorelectronice şi a dezvoltării programelor soft-ware, care permitrezolvarea oricăror tipuri de probleme de analiză dinamică.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
37
Vibrogramele sau funcţiile de transfer oferă un volumlimitat de informaţie, deoarece acestea se referă la oconfiguraţie particulară de încărcare şi condiţii la frontierăparticulare precum şi la o configuraţie particulară de măsurare(dispunerea traductoarelor). În practica inginereascăinteresează însă răspunsul pentru alte cazuri de solicitare şicondiţii la frontieră; în unele cazuri interesează influenţamodificărilor anumitor parametri asupra răspunsului structuriianalizate.
Pentru studiul influenţei modificărilor anumitorparametri asupra răspunsului dinamic se creează modelulanalitic al structurii. Aceasta depinde în mare măsură deintuiţia şi experienţa proiectantului şi are în general uncaracter calitativ, deoarece aceste modele nu sunt capabile săprevadă precis comportarea într-un regim real.
Scopul identificării dinamice a sistemelor mecanice esteelaborarea unor modele analitice, pe baza datelorexperimentale obţinute prin măsurători efectuate pe structurareală care să simuleze cât mai exact comportarea acesteia.
Pentru creerea modelului analitic se fac anumite ipotezede bază asupra comportării structurii. Astfel, pentru ocategorie largă de regimuri de vibraţii, comportareastructurilor elastice poate fi descrisă adecvat de un sistem deecuaţii diferenţiale ordinare liniare de forma (1.26) sau(1.43). Acest sistem reprezintă modelul analitic.
Comparând răspunsul sistemului real cu cel almodelului analitic (fig. 2.1) se evaluează parametriimodelului. Acest lucru se poate face direct, considerânderoarea de măsurare nulă, sau indirect printr-o prelucrarestatistică a rezultatelor măsurătorilor experimentale, şi

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
38
aplicarea unui criteriu de minimizare a erorii între valorilemăsurate şi cele estimate.
2.2. Determinarea experimentală acaracteristicilor dinamice ale sistemelorrealeIdentificarea sistemelor mecanice se bazează pe
prelucrarea matematică a rezultatelor măsurătorilorexperimentale, astfel încât să furnizeze cele mai bune rezultateprivind parametrii dinamici.
Metodele folosite pentru excitaţia structurilor învederea obţinerii acestor date se pot clasifica în :
A. A. A. A. Metode cu o excitaţie impusă (excitaţie cu semnale deprobă).
• cu excitaţie armonică: cu forţe armonice de amplitudineconstantă ;
• cu deplasări impuse de amplitudine constantă;• cu şoc iniţial de tip deplasare, sau impuls (viteză iniţială);• cu forţă armonică de amplitudine constantă şi frecvenţă
rapid-variabilă;• cu forţă armonică de amplitudine proporţională cu pătratul
frecvenţei şi frecvenţă constantă (sau redus-variabilă);• cu excitaţie aleatoare: cu forţe aleatoare de bandă largă sau
îngustă.
B. B. B. B. Metode folosind excitaţii naturale din timpul funcţionării• cu excitaţie periodică staţionară;• cu excitaţie tranzitorie;

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
39
2.2.1. Metode de identificare folosind o excitaţie impusăCele mai multe metode de identificare folosesc o
excitaţie exterioară impusă, numită semnal de testare sausemnal de probă şi care prezintă avantajul de a permite ointerpretare rapidă a rezultatelor măsurătorilor.
Este important ca în timpul experimentelor de acest tip,influenţa altor surse de excitaţie exterioare (parazite) să fieredusă la minim (dacă este posibil chiar anulată). De asemeneatrebuie ca echipamentul folosit pentru excitarea structurii şipentru măsurarea răspunsului, să nu modifice sensibilparametrii dinamici ai structurii.
Metodele de identificare cu excitaţie impusă, sefolosesc în special în cazul structurilor fixe (aflate pe ofundaţie sau în laborator). Proprietăţile dinamice alestructurilor mecanice deduse astfel, diferă uneori de cele dinfuncţionarea normală (în special în cazul structurilorneliniare). Totuşi, prin alegerea unor nivele de excitaţiecorespunzătoare, sau prin realizarea unor pretensionări saupuneri parţiale în funcţiune se pot obţine rezultatesatisfăcătoare scopului propus.
Caracteristicile dinamice ale unui sistem liniar cu osingură mărime de intrare x(t) şi o singură mărime de ieşirey(t) (fig. 2.3), pot fi descrise de:
SISTEM LINIAR
func]ia de pondere: h(t)
func]ia de transfer: H(iω)
M\rimea de ie[ire
y(t)
Fig.2.3.
M\rimea de intrare
x(t)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
40
• funcţia pondere h(t), în domeniul timpului;
• funcţia de răspuns în frecvenţă sau funcţia de transferH(iω), în domeniul frecvenţelor;
Cele două funcţii formează o pereche de transformateFourier, adică este valabilă relaţia:
( ) ( ) ( )∫∞
∞−
− >= 0tdtethiH tiωω (2.1)
În cazul unei excitaţii deterministe, răspunsul este datde integrala de convoluţie:
( ) ( ) ( ) ( ) ( )∫ ∗=−=t
thtxdtxhty0
τττ (2.2)
Din acesată relaţie se observă că funcţia pondere h(t)reprezintă răspunsul la o excitaţie de tip impuls unitate:x(t)=δ(t), unde δ este funcţia lui Dirac.
Practic această excitaţie nu se poate realiza, deoarece încele mai multe cazuri, impulsul de scurtă durată nu aresuficientă energie pentru a produce un răspuns măsurabil.
Funcţia de răspuns în frecvenţă (funcţia de transfer)este dată de relaţia:
( ) ( )( )ωωωiXiYiH = (2.3)
în care: X(iω) şi Y(iω) sunt transformate Fourier aleexcitaţiei şi răspunsului, adică:
( ) ( )∫∞
∞−
−= dtetxiX tiωω ; ( ) ( )∫∞
∞−
−= dtetyiY tiωω (2.4)
Observaţie: Pentru sistemele reale limita inferioară a integralei estezero.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
41
2.2.1.1. Metode de identificare folosind excitaţii armonice
Înlocuind funcţiile de intrare-ieşire: x(t) şi y(t) deforma armonică:
x(t) = tiex ω , y(t) = ( )ϕω +tiey ,
în expresiile (2.4) şi (2.3), se obţine următoarea formă afuncţiei de răspuns în frecvenţă:
( ) ( )( )
ϕω iexy
txtyiH == (2.6)
De aici rezultă că :
• modulul funcţiei de răspuns în frecvenţă H(iω) se poateobţine din caracteristica amplitudine - pulsaţie:
)(fx/y ω= , numită şi spectrul de amplitudini;
• argumentul al funcţiei de răspuns în frecvenţă ϕ, se poateobţine din caracteristica: fază- pulsaţie ϕ =f(ω) numită şispectrul de faze.
Aceste diagrame se determină relativ uşor, folosind oexcitaţie sinusoidală de amplitudine constantă şi frecvenţăvariabilă ω=ω(t) astfel încât cele două caracteristici se potdetermina experimental astfel:• punct cu punct prin efectuarea de măsurători la diferite
frecvenţe în regim staţionar;• continuu (în regim cvasistaţionar) prin efectuarea unui
baleiaj de frecvenţe suficient de lent pentru a permitestabilirea răspunsului de regim la fiecare frecvenţă, înspecial în zona rezonanţelor (în special pentru sistemeleslab amortizate).

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
42
În figurile 2.4 , 2.5 se prezintă astfel de diagramepentru un sistem cu două rezonanţe în domeniul de frecvenţemăsurat.
Sistemele moderne de testare folosesc analizoare defuncţii de transfer cu trei intrări :
• la primele două intrări se aplică semnale armonice deaceeaşi pulsaţie ω, defazate cu unghiul ϕ: ( ) ( ) ( )ϕωω +== tsinyty,tsinxtx
• la cea dea treia intrare, se aplică un semnal de referinţăarmonic de aceeaşi pulsaţie ω, ( ) tcosztz ω= .
Analizorul de funcţii are în componenţa sa unmultiplicator electronic care poate efectua produsele:
( ) ( ) ( ) ( ),tcosxycos
yxtsintsin
xytytx
xϕωϕϕωω +−=+= 222
2
( ) ( ) ( ) ( ).tsinxysin
xytsintcos
xytytz
zxϕωϕϕωω ++=+= 222
Se observă că termenii constanţi ai celor două produsereprezintă tocmai partea reală şi respectiv partea imaginarăale funcţiei de răspuns în frecvenţă H(iω), iar diagramele lorau forma din fig. 2.6.
ϕ
ω
Frecven]a
Figura 2.5
2a
ωFrecven]a
Figura 2.4

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
43
Eliminarea termenilor variabili ai celor două produsepentru reţinerea termenilor constanţi se face cu ajutorulfiltrelor trece - jos ; acestea sunt dispozitive electronice carefac media funcţiilor pe un număr întreg de cicluri.
Astfel dacă se introduc douăsemnale corespunzătoare celordouă componente ale funcţieide transfer (reală şi imaginară)la intrările unui înregistrator încoordonate rectangulare, prinvarierea frecvrenţei celor terisemnale, se obţin diagramelepolare ale răspunsului (saudiagramele Nyquist) care auforma ca în fig.2.7.
Această metodă oferă precizia maximă şi necesităechipamentul cel mai ieftin, dar efectuarea măsurătorilor şi înspecial a montajului experimental durează mult şi deasemenea, sunt necesare etalonări frecvente.
Im
Re
Componenta real\
Figura 2.7.
Figura 2.6.
Re H(iω)
ω
b.a.
Frecven]a
ωFrecven]a
Im H(iω)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
44
2.2.1.2. Metode de identificare folosind excitaţii nearmonice
Pe baza relaţiei funcţiei de transfer (2.3), folosindtransformata Fourier rapidă, se pot determina funcţiile detransfer şi pentru alte tipuri de excitaţie decît cele armonice,cum ar fi excitaţiile tranzitorii sau impulsurile.
Cea mai simplă excitaţie nearmonică o reprezintăimpulsurile de formă dreptunghiulară, triunghiulară,trapezoidală, semisinusoidală etc. şi poate fi produsă cuajutorul generatoarelor electronice de semnal cuplate lavibratoare electrodinamice.
Deoarece, în cazul sistemelor cu cu număr infinit degrade de libertate, spectrul de amplitudini ale acestorimpulsuri se anulează la anumite frecvenţe (vezi fig.2.8) şiocupă teoretic un domeniu infinit de frecvenţe, existădezavantajul de a nu excita anumite frecvenţe de rezonanţă şia excita altele din afara domeniului de interes.
Aceste dezavantaje pot fi înlăturate prin folosireaexcitaţiei cu semnale sinusoidale de amplitudine constantă şifrecvenţă rapid-variabilă. Astfel, dacă se aplică un semnalsinusoidal de frecvenţă rapid-variabilă de forma:
x(t)=sin(at2+bt) 0 < t < Tunde: T este durata baleiajului, a cărui frecvenţă variază
între f1 şi f2, ( ) ,,ffT
a 1f2=b ππ12 −=
rezultă un spectru de amplitudini aproximativ constant şilimitat în banda de frecvenţe (f1 , f2) ca în fig.2.9.
Pentru studiul modelelor la scară redusă (a machetelor)se foloseşte metoda excitaţiei prin lovire cu un ciocan special,prevăzut cu captori de forţe şi acceleraţii, pentru măsurarea

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
45
semnalelor de intrare x(t) şi ieşire y(t), care sunt înregistrate şiprelucrate într-un analizor Fourier în timp real, obţinânddirect funcţia de răspuns în frecvenţă.
Încercările în regim tranzitoriu sunt mai rapide,necesitând un timp minim de măsurare. Chiar în cazul când sefolosesc vibratoare, montajul este mult simplificat.
În acest caz, domeniul dinamic de măsurare al aparaturiitrebuie să fie mai mare decât cel necesar măsurătorilor înregim armonic. În timpul înregistrării semnalelor,amplificatoarele şi convertoarele analog-numerice nu trebuiesă lucreze în suprasarcină. La excitaţia prin lovire cu ciocan,se obţin rapoarte semnal/zgomot inferioare celor ce rezultăfolosind alte tipuri de excitaţie.
2.2.2. Metode de identificare folosind excitaţii aleatoare
Pentru identificarea sistemelor mecanice se pot folosi şimetode de excitaţie cu semnale aleatoare şi pseudo-aleatoare.În acest scop se folosesc generatoare de zgomot, de bandă
X(iω)
Figura 2.8.
ωT 2π
Figura 2.9.
f1 f2
Formaimpulsului
X(iω) AT
0.8
0.6
0.4
0.2
0
2 431 ω

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
46
largă, care sunt cuplate cu vibratoare electrodinamice şiproduc o excitaţie având un spectru de amplitudine constantpe toată banda frecvenţelor de interes. În acest fel sunt excitatesimultan toate componentele spectrale şi se poate face oanaliză simultană, în timp real.
Funcţia de răspuns în frecvenţă se calculează cuajutorul relaţiei:
( ) ( )( )ωω
ωxx
xy
SiS
iH = (2.7)
unde: Sxx(ω) este densitatea spectrală de putere a excitaţiei(excitaţia aleatoare este staţionară şi ergodică)Sxy(iω) , densitatea interspectrală de putere a excitaţieişi răspunsului.Dacă densitatea spectrală de putere a excitaţiei este
constantă pe tot domeniul frecvenţelor de interes: Sxx(ω) = S0(excitaţie numită “zgomotul alb”, realizabilă tehnic), atuncidensitatea interspectrală Sxy(iω) conform relaţiei (2.7) esteproporţională cu funcţia de răspuns de frecvenţă H(iω):
Sxy(iω) = Sxx H(iω) = S0 H(iω), Funcţia de intercorelaţie excitaţie - răspuns(transformata Fourier a densităţii interspectrale ) este:
( ) ( )∫∞
∞−
= ωωτ ωτ deiSR ixyxy (2.8)
şi funcţia de transfer H(iω), conform relaţiei 2.1 esteproporţională cu funcţia pondere h(t).
Atunci când nu interesează variaţia fazei cu frecvenţa,se poate folosi relaţia:
( ) ( )( )ωω
ωxx
yy
SS
iH = (2.9)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
47
unde: Syy(ω) este densitatea spectrală de putere arăspunsului.
2.2.3. Metode de identificare folosind excitaţii pseudoaleatoare
Semnalele pseudoaleatoare sunt produse de ungenerator electronic special, sau sunt sintetizate cu ajutorulunui dispozitiv electronic special utilizat pentru efectuareatransformatei Fourier rapide (acesta poate face transformareainversă a oricărei funcţii spectrale).
Încercările folosind semnale pseudoaleatoare auavantajul de a excita simultan toate componentele spectraledin domeniul de interes, ceea ce permite identificareastructurilor cu parametri variabili în timp.
Folosind o mediere exponenţială a densităţilor deputere spectrale Sxx (ω) şi interspectrale Sxy(iω), se poate faceo analiză în timp real, deci o observare “on-line” a efectelormodificărilor parametrilor. Procedeul este deosebit de util laoptimizarea răspunsului unei structuri prin modificări asupraparametrilor dinamici ai structurii (repartiţia maselor,rigidităţii sau amortizării).
În general, echipamentul necesar pentru efectuareaacestui tip de măsurători este mai scump decât cel folosit încazul excitaţiilor armonice, raportul semnal/zgomot fiind înacest caz mai mic (dar poate fi îmbunătăţit mărind timpul demediere), iar nivelul răspunsului este limitat datorită faptuluică puterea de excitaţie este repartizată pe o bandă largă defrecvenţe.
2.2.4. Metode de identificare folosindexcitaţii din funcţionarea structurii

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
48
În unele cazuri, excitaţia “activă” (cu semnale de probăexterne, în special cele armonice), măreşte nivelul răspunsuluistructurii peste limitele admisibile, existând pericolul dedeteriorare sau distrugere a structurii testate. În alte cazuri,excitaţia activă este insuficientă, (ca în cazul podurilor şiclădirilor mari, sau al fundaţiilor masive), cazuri în care numaiexcitaţia seismică sau cea datorată vântului pot producerăspunsuri măsurabile ale structurii.
Rezultate bune se obţin calculând funcţia de răspuns înfrecvenţă cu ajutorul relaţiei (2.7). Existenţa unor programe decalcul rapid pentru transformata Fourier, permite obţinereafuncţiilor densităţilor de putere spectrale Sxx(ω) şiinterspectrale Sxy(iω), cu ajutorul funcţiilor de intercorelaţie şide autocorelaţie:
( ) ( ) ( )∫−
+⋅∞→
=2
2
1T
Txy dttytx
TTlimR ττ ; ( ) ( ) ( )∫
−
+⋅∞→
=2
2
1T
Txx dttxtx
TTlimR ττ
pe baza semnalelor de intrare x (t) şi de ieşire y (t) măsurate îndouă puncte diferite ale structurii.
Densităţilor de putere spectrale Sxx (ω) şi interspectraleSxy(iω), se calculează cu ajutorul transformatelor Fourier:
( ) ( )∫∞
∞
−= ττω ωτ deRS ixxxx şi ( ) ( )∫
∞
∞
−= ττω ωτ deRS ixyxy (2.10)
Aceleaşi operaţii se pot face cu ajutorul analizoarelorspectrale în timp real, care se bazează pe efectuareatransformatei Fourier rapide.
Prin calculul funcţiei de coerenţă:

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
49
( )
( ) ( )ωωω
yyxx
xy
SSiS
F2
= ,
se poate evalua domeniul de frecvenţe şi amplitudinearăspunsului neliniar.
2.2.5. Metode de identificare folosind modele ajustabileMetodele de identificare folosind modele ajustabile,
deşi sunt utilizate frecvent în identificarea proceselorautomate, au încă o utilizare restrânsă în domeniul analizeidinamice a structurilor mecanice.
În principiu, se foloseşte un model fizic al structurii (deexemplu, un generator de funcţii de transfer) la intrarea căruiase introduce un semnal identic cu semnalul de excitaţie astructurii reale.
Semnalul la ieşirea modelului fizic este comparatcontinuu cu semnalul-răspuns corespunzător al structurii realeşi în funcţie de diferenţa dintre dintre cele două semnale, seefectuează ajustarea modelului.
Deoarece în multe cazuri, unii parametri pot suportamodificări, se variază aceşti parametri, până la minimizareaunei funcţionale a erorii, urmărindu-se, în acelaşi timp, să seasigure o convergenţă cât mai rapidă a acestei funcţionale.
Dacă ajustarea parametrilor modelului se face automat, modelul se numeşte adaptiv. Dacă modelul adaptiv esteprevăzut cu memorie (astfel încât, pe baza informaţiiloranterioare asupra modificărilor parametrilor structurii, el poateadopta şi aplica o strategie corespunzătoare de ajustare aparametrilor săi în timp real) el se numeşte model instruibil.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
50
Metodele ce utilizează modele ajustabile deşi suntcostisitoare, prezintă avantajul că se aplică în condiţii defuncţionare normală a structurilor mecanice şi permitedeterminarea directă şi cu precizie ridicată a modeluluianalitic corespunzător.
2.3. Structura modelelor analitice2.3.1. Modele analitice discreteStructurile reale sunt sisteme continue cu parametri
distribuiţi. Răspunsul acestor sisteme ar trebui definit cuajutorul unui număr infinit de coordonate generalizate, aceastaînsemnând teoretic, un număr infinit de grade de libertate.
Practica inginerească, a demonstrat că este suficientdacă se cunosc valorile funcţiei de răspuns într-un număr finitde puncte reprezentative ale structurii, funcţia răspuns fiinddefinită în acest caz cu ajutorul unui număr finit de coordonategeneralizate. Acesta reprezintă argumentul utilizării modelelorcu număr finit de grade de libertate (discrete) şi a folosiriiunui sistem finit de ecuaţii de mişcare.
În general, caracteristicile unui model depind în primulrând de modul în care este solicitată structura studiată. Înpractica inginerească nu totdeauna este necesar ca modelul săse comporte identic cu structura reală. Pentru construireamodelului modal, în aplicaţiile practice interesează răspunsulstructurii într-un număr finit de puncte reprezentative şi pentruun domeniu limitat de frecvenţe ale forţelor excitatoare.
Astfel în sinteza modală, acest model trebuie să includăpunctele de legătură între diferitele substructuri (de exemplu,la îmbinarea suprafeţelor vaselor sub presiune) iar înoptimizarea structurilor modelul trebuie să includă punctele

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
51
în care se vor efectua unele modificări ale parametrilordinamici (mase, rigidităţi , etc)
În general, alegerea modelului, precum şi a punctelorde excitaţie, trebuie astfel făcută încât, comparândrăspunsurile modelului cu răspunsurile determinateexperimental pe structura reală, acestea să fie cât maiaproapiate. Deoarece alegerea unui număr prea mare de puncteconduce la rezultate eronate (mai ales atunci când se puneproblema trecerii de la modelul analitic la modelul fizic), selimitează numărul acestor puncte, la aprecierea inginerului.
2.3.2. Modele analitice modaleCele mai multe metode de identificare urmăresc
definirea unui model analitic modal. În cazul sistemelormecanice cu amortizare vâscoasă proporţională, un modelanalitic modal constă în trei tipuri de ecuaţii:1) o ecuaţie diferenţială a mişcării pentru fiecare mod devibraţie: ( )NrFpkpcpm rrrrrrr ,....,2,1, ==++ !!! (2.11)
care arată că sistemul se comportă pentru fiecare mod devibraţie r , la fel ca un sistem cu un grad de libertate “măsă-arc-amortizor”, fiind deci un sistem complet decuplat.
2) o ecuaţie de transformare a coordonatelor
( ) ( )∑=
==N
rr
rjj Pjpq
1
,...,2,1,ψ (2.12)
care arată că mişcarea în punctele de măsurare alesistemului real, se obţine prin suprapunerea mişcărilorcorespunzătoare tuturor modurilor de vibraţie, ponderate cuun coeficient de formă modal.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
52
3) o ecuaţie de transformare a forţelor
( ) ( )∑=
==P
ll
rlr N,...,,r,fF
1
21ψ (2.13)
care arată că forţa care “acţionează asupra fiecărui mod”este egală cu suma forţelor exterioare ce acţionează asuprastructurii, înmulţite cu coeficienţii de formă respectivi.
În continuare se vor studia sistemele liniare,negiroscopice, cu parametri invariabili în timp. Pentrudefinirea modelului analitic al acestor sisteme cel maiimportant parametru este nivelul amortizării din sistem :
Se disting următoarele patru tipuri de structuri:1. Structuri foarte slab amortizate, la care raportul de
amortizare ζ este sub 0,05 şi amortizarea se poate decineglija, astfel încât mişcarea este descrisă de ecuaţiilevibraţiilor forţate neamortizate (1.15). Răspunsul armonicpoate fi exprimat în funcţie de parametrii modali şi demodurile reale “clasice” de vibraţie, sub forma (1.24):
{ }( ){ } { } ( ){ }( ) ,e
mfq
N
r
ti
rr
rTr
∑= −
=1
22ω
ωωψψ (2.14)
unde: ωr sunt pulsaţiile proprii, mr - masele modale, [ψ(r)Ţ- vectorii modali.
2. Structuri cu amortizare redusă, la care se neglijeazătermenii nediagonali ai matricei [ψ]T[C][ψ] (1.28), astfelcă raspunsul poate fi exprimat tot în funcţie de modurilereale “clasice” ale sistemului conservativ asociat (1.42):
{ }( ){ } { } ( ){ }
( )∑= +−
=N
r
ti
rrrr
rTr
eim
fq1
22 2
ˆ~ ω
ωωζωωψψ (2.15)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
53
unde: rr
rr m
cω
ζ2
= este raportul de amortizare modal.
3. Structuri cu amortizare moderată, la care cuplajele prinamortizare nu mai pot fi neglijate, şi dacă se consideră căamortizarea este neproporţională, răspunsul se exprimă înfuncţie de modurile reale forţate de vibraţie (1.53):
{ }( ){ } { } ( ){ } ,
igk
fqN
rr
rr
rTr
∑=
+−
=1
2
2
1ωω
ψψ (2.16)
sau în funcţie de modurile complexe de vibraţie (1.125):
{ }( ){ } { } ( ){ }( )∑
= −=
N
r
ti
rr
rTr
eiu
qfqq2
1
ˆω
σω (2.17)
unde: σr este pulsaţia complexă (1.106): rrr in µσ +−= ;
nr şi ur au fost definite prin relaţiile (1.107) şi (1.108).4. Structuri puternic amortizate, la care nu se pot distinge
moduri de vibraţie individuale, răspunsul în frecvenţă seexprimă sub forma receptanţei de transfer în punctul j(1.126):
( ) ( )
( )∑= −
==N
r rr
rj
rl
l
jjl iu
qqfq 2
1ˆ
~
σωα (2.18)
2.3.3. Natura parametrilor modelelor analiticeParametrii care definesc răspunsul unei structuri
continue sunt de două categorii: parametri măsurabili(observabili) şi parametri nemăsurabili direct (abstracţi).
a) Parametrii măsurabili pot fi determinaţi direct prinmăsurători pe structura reală. Ei nu depind de structura

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
54
modelului analitic. Spre exemplu, elementele matriceicoeficienţilor de influenţă [ ] [ ] 1−= Kδ reprezintă parametrimăsurabili: prin definiţie elementul δδδδij al matricei [ ]δreprezintă deplasarea în direcţia coordonatei qi datorită uneiforţe unitare aplicate pe direcţia coordonatei qj. Acestparametru nu depinde de forma modelului matematic(analitic).
Din aceeaşi categorie fac parte: vectorii modali ( ){ }rψ ,mr, kr, cr, funcţiile răspunsului în frecvenţă (receptanţa,mobilitatea, inertanţa), etc.
Din punct de vedere analitic, parametrii măsurabili sepot exprima în funcţie de vectorii modali; de exemplu:
[ ] [ ] [ ][ ] .Kk TD ψψ=
Evaluarea lor analitică necesită deci rezolvarea uneiecuaţii diferenţiale.
b) Parametrii abstracţi exprimă proprietăţi fizico-mecanice ale materialelor (de aceea se mai numesc şiparametrii intuitivi) şi nu pot fi determinaţi prin măsurătoridirecte pe structura reală; de exemplu, valorile elementelormatricelor [M], [C] şi [K] nu sunt măsurabile; prin definiţie,elementul kij al matricei [K] este egal cu forţa interioară careapare pe direcţia coordonatei qi, datorită unei deplasări unitarepe direcţia coordonatei qj, când toate coordonatele cu excepţiacoordonatei qj , sunt nule; această condiţie nu se poate realizapractic, deci kij nu este un parametru direct măsurabil. Valorileelementelor kij depind, de exemplu, de numărul şi dispunereapunctelor alese drept coordonate în structura modelului.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
55
Din punct de vedere analitic, parametrii abstracţi seexprimă cu ajutorul inverselor matricilor modale. De exemplumatricea rigidităţii se exprimă: [K] = [ ] [ ] [ ] .k DT 1−− ψψ
Parametrii abstracţi pot fi deduşi direct din analizamatematică a modelului şi au un sens fizic intuitiv.Transformarea lor în cantităţi măsurabile necesită o inversarea unei matrici, sau rezolvarea unei ecuaţii diferenţiale. Înconcluzie, nu se pot masura direct parametrii care pot fimodelaţi intuitiv şi ne se pot modela parametrii care se potmăsura direct.
2.3.4. Trecerea de la modelul modal la modelul fizic
Multe metode de identificare se limitează ladeterminarea unui model modal (pulsaţiile proprii, vectoriimodali şi parametrii modali). Metodele care îşi propunevaluarea parametrilor fizici intuitivi ai modelului, pe bazainformaţiilor experimentale întâmpină unele dificultăţimatematice legate de inversarea unor matrici rău distribuite,sau de neunicitatea matricilor modelului modal.
Dacă n-ar exista aceste probleme, identificareasistemelor mecanice s-ar simplifica foarte mult. Pentrujustificarea acestei afirmaţii se consideră exemplul simplu alvibraţiilor armonice ale unui sistem conservativ. Ecuaţiilevibraţiilor armonice se scriu (1.15):
[ ]{ } [ ]{ } { } ,fqKqM =+!!
sau: [ ] [ ]( ){ } { }fqMK =− 2ω (2.19)
Dacă se aplică forţe armonice de pulsaţie ω1 la fiecaredin coordonatele arbitrare ale modelului structurii şi se

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
56
măsoară deplasările tuturor acestor puncte, se poate determinamatricea receptanţelor:
[ ] [ ][ ] ( )[ ]1121 ωαω =−
−MK (2.20)
Repetând măsurătorile cu forţe armonice de pulsaţie ω2
(ω2 ≠ ω1), se obţine matricea receptanţelor corespunzătoare:
[ ] [ ][ ] ( )[ ]212
2 ωαω =− −MK (2.21)
Inversând cele două matrici ( )[ ] ( )[ ]21 ωαωα , , rezultăsistemul:
[ ] [ ] ( )[ ] 1121
−=− ωαω MK , (2.22)
[ ] [ ] ( )[ ] 1222
−=− ωαω MK
de unde rezultă matricile [K] şi [M].Cu excepţia unor cazuri particulare (sisteme cu număr
mic de grade de libertate), metoda nu se poate aplica practic,deoarece matricile receptanţelor nu pot fi inversate (în specialcând numărul coordonatelor alese este prea mare). În acestcaz, domeniul acoperit de valorile pulsaţiilor proprii devineatât de larg, încât cerinţele privind precizia măsurătorilor numai pot fi realizate.
Într-adevăr, după cum se ştie, la dezvoltarea spectrală aunei matrici, valoarea proprie cea mică a matricii, devinevaloarea proprie cea mai mare a matricii inverse.
Folosind notaţia: [ ] [ ]K − =1 δ ,
ecuaţiile (1.5’) şi (1.5”) se scriu:
[ ] [ ] ( ){ } ( ){ }[ ][ ] ( ){ } ( ){ }.1
;
2
21
r
r
r
rr
r
M
KM
ψω
ψδ
ψωψ
=
=−
(2.23)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
57
Vectorii proprii la dreapta, ai matricilor[ ] [ ] [ ][ ]M K si M−1 δ sunt identici. În schimb, modul dominant almatricii [ ] [ ]M K−1 este cel cu pulsaţia ωr cea mai înaltă, în timpce modul dominant al matricii [ ][ ]δ M este cel cu pulsaţia ωr
cea mai joasă (inversa 1/ωr este cea mai înaltă).Folosind matricea modală (1.12), ecuaţiile (2.23) devin:
[ ] [ ][ ] [ ] [ ][ ][ ][ ] [ ]
D
r
Dr
M
KM
=
=−
2
21
1
;
ωψψδ
ωψψ (2.24)
Utilizând relaţia (1.14), se obţin matricile:
[ ] [ ][ ] [ ] [ ] [ ] ( ){ } ( ){ } [ ]∑=
=
=
N
r
Trr
r
rTD
r
r MMm
Mm
MK1
22
ψψωψωψ (2.25)
[ ] [ ] [ ] ( ){ } ( ){ }∑=
=
=
N
r
Trr
rr
TD
rr mm 122
11 ψψω
ψω
ψδ (2.26)
Rezultă că termenii dominanţi ai matricii [K] provin dincontribuţia modurilor proprii înalte. În schimb, termeniidominanţi ai matricei [δ] provin din contribuţia modurilor cupulsaţii proprii joase (aceasta fiind invers proporţională cu
2rω ). Dacă matricea măsurabilă [δ], este rău distribuită şi nu
conţine informaţii utile asupra modurilor cu pulsaţii propriiînalte, nici inversa ei [K] nu va conţine informaţii utile, decielementele matricei [K] vor avea valori nesemnificative.
Berman [7] a arătat că dacă între pulsaţiile propriiextreme există raportul ( ) 42
11 10100 == ωωωω /atunci,/ NN ,astfel încât pentru a avea o matrice [δ] inversabilă, preciziadeterminării experimentale a elementelor δij trebuie să fie deordinul 1:104 .

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
58
2.4. Identificarea dinamică a sistemelor cu excitaţie armonică într-un punct
2.4.1.Principiul metodei de identificareÎn cazul sistemelor cu N grade de libertate, cu
amortizare proporţională histeretică, receptanţa complexă aunui sistem are forma unei sume, fiecare termen reprezentândrăspunsul corespunzător unui singur mod de vibraţie (1.56):
( ) ( ).
ihmkfq~ N
r rrr
rj
rl
l
jjl ∑
= +−==
12ωψψ
α (2.51)
Practic sistemul este solicitat cu o forţă till eff ω=
aplicată pe direcţia coordonatei generalizate ql şi se măsoarărăspunsul ti
jj eq~q ω= pe direcţia coordonatei generalizate qj ,pentru diferite pulsaţii de excitaţie ω. Pe baza rezultatelorobţinute se calculează receptanţa complexă:
ImjlRejli
jll
jjl ie
fq
αααα ϕ +=== (2.52)
şi care se poate reprezenta grafic sub forma diagramelor:
a) amplitudine -pulsaţie αααα j l = f(ωωωω) şi fază-pulsaţie ϕϕϕϕ= f(ωωωω);
b) componenta reală (în fază cu forţa) αααα jlRe =f(ωωωω) şicomponenta imaginară a răspunsului (în cuadratură cuforţa) αααα j lIm =f(ωωωω);
c) polară (locul geometric al extremităţii vectoruluireceptanţă complexă ljα în planul complex), având caparametru ω.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
59
Dacă în timpul baleiajului de frecvenţe, pulsaţia forţeiexcitatoare ω se apropie de valoarea critică rrr m/k=ω
contribuţia termenului r din expresia lui ljα devinepredominantă, iar variaţia acestui termen cu pulsaţia,corespunde comportării în vecinătatea rezonanţei a unuisistem echivalent cu un singur grad de libertate, avândparametrii mr, kr şi hr .
Răspunsul sistemului în modul de vibraţie r sesuprapune peste ceilalţi termeni ai sumei (2.51). Diferitelemetode de analiză a răspunsului în frecvenţă diferă prinipotezele ce se fac asupra contribuţiei modurilor de vibraţie“nerezonante” în răspunsul total, în vecinătatea frecvenţei derezonanţă şi prin procedeul de separare a modurilor devibraţie, atunci când sitemele au pulsaţii proprii apropiate.
În cadrul metodelor de identificare cu excitaţiearmonică într-un punct se urmăreşte determinareaurmătoarelor mărimi:a) pulsaţiile de rezonanţă, care se consideră egale cu
pulsaţiile proprii ωr ale sistemului conservativ asociat;b) parametrii modali ζr sau gr, mr şi kr ;c) depasările modale ( )r
jψ , deci matricea modală [ψ] . Pe bazaacestora se determină apoi matricile [M], [K], [C] sau [H].
În toate cazurile este absolut necesară repetareamăsurătorilor cu vibratorul plasat în diferite puncte alestructurii, pentru a ne asigura că toate nodurile importante alestructurii au fost exicitate. De asemenea, se aleg punctele demăsurare a răspunsului astfel încât să se obţină un raportmaxim între semnal şi zgomot.
În cazul sistemelor cu N grade de libertate, cuamortizare neproporţională, se desprind concluzii similare. În

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
60
acest caz însă, dificultatea măsurării formei modurilor dedistorsiune sau a modurilor complexe de vibraţie, impune maiîntâi determinarea lor prin calcul, deci folosirea unor metodecombinate analitico-experimentale, ceea ce implică folosireacalculatoarelor electronice şi a unor programe softprofesionale.
2.4.2. Identificarea sistemelor neamortizate2.4.2.1. Metoda curbelor de răspuns în frecvenţăSoluţia staţionară a ecuaţiilor de mişcare ale unui sistem
neamortizat cu N grade de libertate, solicitat de forţe armoniceîn fază, are forma (1.24):
{ }( ){ } { } ( ){ }∑
=
−
=N
r
rr
rTr
k
fq1
2
2
1ωωψψ (2.53)
În cazul excitaţiei într-un punct, receptanţa în punctulde solicitare este:
( ) ( ) ( )
∑ ∑= = −
=
−
==N
r
N
r
r
r
rr
rr
kfq
1 12
2
2
2
11ωω
χ
ωω
ψψα """"
"
""" (2.54)
iar receptanţa de transfer este:( ) ( ) ( )
.kf
q N
r
N
r
r
rlj
rr
rj
rl
l
jjl ∑ ∑
= = −=
−
==1 1
2
2
2
2
11ωω
χ
ωω
ψψα (2.55)
Cantitatea: ( )( ) ( )
r
rrr
k""
""
ψψχ = este totdeauna pozitivă.
În schimb cantitatea: ( )( ) ( )
r
rj
rr
j kψψ
χ "
" = este pozitivă, când
punctele j şi l se mişcă în fază şi negativă când punctele se

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
61
mişcă în opoziţie de fază. Se folosesc curbele mobilităţii şiimpedanţei mecanice.
Expresia mobilităţii directe în punctul de solicitare este:
Mll = ( )∑= −
==N
r
r
rllll
l
l
fq
12
2
1ωωωχαω
! (2.56)
iar expresia mobilităţii de transfer:
Mjl = ( )∑= −
==N
r
r
rjj
j
f
q
12
2
1ωωωχωα ""
"
! (2.57)
Expresia derivatei în raport cu ω a termenului generaldin expresia (2.57) se scrie:
( )( )
2
2
2
2
2
2
2
1
1
1
−
+=
−r
rrj
r
rj
dd
ωω
ωω
χ
ωω
ωχω "
" , (2.58)
unde se observă că semnul derivatei depinde de semnultermenului ( )χ j
r" .
Se observă că panta diagramei mobilităţii directe(fig.2.10.a) este totdeauna pozitivă, curba având salturi de la
MjlMll
ωω3ω2ω1 ωω3ω2ω1
b.a. Fig. 2.10

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
62
+∞ la -∞ în dreptul pulsaţiilor de rezonanţă. Între două pulsaţiide rezonanţă există totdeuna una de antirezonanţă şi invers.
Curba mobilităţii de transfer (fig.2.10.b) are o alurădiferită, datorită existenţei termenilor ( )r
j"χ negativi în expresia(2.58). Astfel, panta diagramei putând fi şi negativă, întredouă pulsaţii de rezonanţă poate apare un minim, fără camobilitatea să se anuleze.
Dintre cele trei reprezentări ale răspunsului unui sistemîn punctul de acţionare, sub forma de diagramă a receptanţeidirecte (fig. 2.11.a), a mobilităţii directe (fig.2.11.b) sau ainertanţei directe (fig.2.11.c), se preferă diagrama mobilităţii,datorită “simetriei”.
De asemenea, se foloseşte diagrama impendanţeimecanice directe (fig.2.11.d), pe care apar antirezonanţele camaxime, rezonanţele ca minime
2.4.2.2. Metoda diagramelor “schelet”Trasând curba mobilităţii sau impendanţei mecanice
directe, fiecărui segment al diagramei “schelet” ( fig. 2.11) i sepoate determina valoarea corespunzătoare a masei m' sau aconstantei elastice k' a elementelor care au acelaşi răspuns înfrecvenţă (fig.2.12.).
La intersecţia unei linii k' cu o linie m', pulsaţia derezonanţă ωR sau pulsaţia de antirezonanţă ωA au valoarea:
'm'k
R =ω ; 'm'k
A =ω
logM
lgωA1 A2
R
b
logα
lgω
R
A1 A2
a.
logη
lgω
A1
R
A2
c.Fig.2.11
R
d.
logZ
lgω
A1A2

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
63
Pentru diagrama “schelet” din fig. 2.12 rezultă deci:
0
2
12
1231
2
2
2322
2
23
22
33,
RR
AAA,
R
AA,
R
A,A
, mmkmk
=
===
ωωωωω
ωωω
ωωω (2.59)
2.4.2.3. Metoda modelului modalDacă în timpul încercărilor structura este rezemată liber
pe o suspensie foarte elastică şi de amortizare neglijabilă,relaţia (2.54) se scrie
( ) ( )
( )∑=
−−
==N
r rr
rr
Mmfq
1222
1
""
""
"
""" ωωω
ψψα (2.60)
Termenul suplimentar din membrul drept se datoreştemişcării de corp rigid a structurii pe suspensia elastică.Parametrul constant Mll depinde de masa totală a structurii, demomentul de inerţie masic al acesteia şi de poziţia punctului "faţă de centrul de greutate. Pe baza diagramei răspunsului înfrecveţă α ll=f(ω) determinată experimental, se obţin directpulsaţiile de rezonanţă ωr şi cele de antirezonanţă ωAr .
Davis [14] recomandă normalizarea modurilor devibraţie prin egalarea tuturor maselor modale cu masa totală astructurii. În acest caz, evaluând expresia (2.60) la fiecare

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
64
pulsaţie de antirezonanţă, deci pentru α "" = 0, se obţinesistemul de ecuaţii:
( ) ( )
∑=
=−
N
r Ar
r
Arr
rl
rl
Mm
1222
""ωωωψψ (2.61)
unde ωAr este pulsaţia de antirezonanţă imediat inferioarăpulsaţiei de rezonanţă ωr din care se determină ( )r
"ψ .
Cantitatea ""M
mr din membrul drept se calculează
cântărind structura (dacă este posibil) şi determinându-irăspunsul liber, în cazul rezemării pe arcuri etalonate.
Odată măsuraţi coeficienţii modali ( )rlψ în punctul de
solicitare, ceilalţi coeficienţi se determină vibrând structura lafiecare rezonanţă, astfel încât răspunsul să fie dominat doar demodul corespunzător de vibraţie.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
65
CAPITOLUL IIIMETODE ACTUALE ÎN
DOMENIUL ANALIZEI MODALE
Fazele importante ale unei analize modaleexperimentale, conform [27] sunt:1. Testul experimental propriu-zis (testul set-up)2. Achiziţia de date şi estimarea funcţiei de răspuns în
frecvenţă (FRF);3. Identificarea dinamică a sistemului (determinarea
caracteristicilor dinamice pe baza măsurătorilor intrare-ieşire);
4. Validarea modelului virtual;5. Utilizarea parametrilor modali determinaţi (în scopul
reproiectării, optimizării comportării dinamice a sistemelormecanice sau studiului comportării stucturii în ansambluldin care face parte).
6. Ajustarea, corelarea şi corectarea modelului (updating-ul);

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
66
3.1 Testul experimental propriu-zisCondiţiile tehnice, scopul, rezultatele obţinute în cadrul
testului experimental propriu-zis pentru diferite structuriparticulare, sunt prezentate pe larg în literatura de specilitate[25], [28], [51], [57], [58], [69].
Acest capitol prezintă metodele analizei modaleexperimentale, fundamentele oricărei analize modale completea unei structuri mecanice precum şi metodele validăriimodelului virtual creat.
3.2. Achiziţia de date pentru estimareafuncţiei de răspuns în frecvenţă (FRF)Studiul experimental al vibraţiilor în cazul structurilor
mecanice complexe, aşa cum rezultă din capitolul 2, se poateface în trei moduri:1. prin determinarea experimentală a nivelului vibraţiilor sau
a mărimilor de ieşire şi compararea lor cu anumite valoristandard: aceste valori sunt stabilite folosind diferitecriterii (cum ar fi tensiunile şi deformaţiile maxime,rezistenţa la oboseală, siguranţa şi confortul, etc.)
2. prin determinarea forţelor aplicate sau a mărimilor deintrare: măsurând forţele perturbatoare produse de omaşină se poate proiecta izolarea antivibratorie activă aacesteia, sau măsurând trepidaţiile unei fundaţii se poateproiecta izolarea antivibratorie pasivă a acesteia.
3. prin măsurarea mărimilor ieşire în funcţie de mărimile deintrare date ale structurii (diferite forţe de excitaţiecunoscute, de obicei armonice) şi compararea lor pentrudeterminarea caracteristicilor dinamice (amortizări,rigidităţi, mase echivalente), pentru determinarea

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
67
frecvenţelor proprii şi a modurilor proprii de vibraţie, saupentru stabilirea modelului matematic şi validarea luipentru analize ulterioare prin simulare.
Observaţii :a. În ceea ce priveşte măsurările nivelelor pentru primele
două tipuri de parametri, se determină mărimi absolute, iarîn ceea ce priveşte măsurătorile comparative pentru cel de-al treilea tip de parametri, se determină mărimi relative,nefiind necesară deci o etalonare precisă a aparaturii;
b. O primă problemă este alegerea şi aprecierea niveluluimărimilor caracteristice ale vibraţiilor, a locului deamplasare a captorilor de vibraţii în scopul alegerii corectea tipurilor de aparate de măsură;
c. Schema generală a unui lanţ de măsurători este dată înfig.3.1. De la structura aflată în vibraţie, caracteristicilevibraţiilor sunt preluate de captori, care transformă aceastăcaracteristică într-un semnal electric cu ajutorul unuitraductor, semnal care este apoi transmis unui aparat deprelucrare şi analiză amplificându-l la o anumită valoarenecesară pentru înregistrare, înmagazinare (stocare) sauvizualizare .
Prelucrarea
informa]iilor
~nregistrarea
informa]iilor
Analiza
semnalelor
Intrepretarea
rezultatelorCalculator
Fig. 3.1 Fig. 3.1 Fig. 3.1 Fig. 3.1
~nmagazinarea
informa]iilor
M\surarea [i
prelucrarea
semnalelor
Preluarea [itraducereasemnalelor
STRUCTURA
TESTAT|
Vizualizarea
informa]iilor
TRADUCTOR
DE VIBRA}II

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
68
Extinderea metodelor de măsurare electrică a mărimilormecanice în ultimii ani a permis o dezvoltare a metodelor şiaparatelor de măsurare a vibraţiilor. În funcţie de mărimeamăsurată, aparatele de măsură a vibraţiilor sunt de mai multetipuri: frecvenţmetre, vibrometre, vitezometre, accelerometre,torsiometre, dinamometre, tahometre, fazmetre, etc.
Experienţa inginerească acumulată în domeniulmăsurătorilor de vibraţii, permite următoarele recomandări:
• măsurarea deplasărilor , pentru componentele defrecvenţe joase ale vibraţiilor, adică domenii alefrecvenţelor cuprinse între 0 . . . 1 kHz;
• măsurarea vitezelor , pentru vibraţiile structurilor avândun spectru de frecvenţe până la 2 KHz, cu componente alevitezelor relativ constante;
• măsurarea acceleraţiilor, pentru componente înalte alefrecvenţelor, adică între 2 . . . 20 KHz; în ultimul timp însă,datorită dezvoltării amplificatoarelor şi a apariţiei unor noitipuri de accelerometre (de mare sensibilitate), se observătendinţa de extindere a metodelor de măsurare aacceleraţiilor şi în domeniul frecvenţelor sub 2 kHz.
Elementul principal al unui lanţ de măsurători devibraţii este un dispozitiv numit captor de vibraţii, ce conţinetraductorul si o serie de elemente care fac posibilă prelucrareaşi transmiterea semnalului
Funcţiile importante ale captorului de vibraţii sunt:amplificarea semnalului dat de traductor, funcţia demultiplexare (dacă numărul de canale al înregistratoarului estemai mic decât cel al semnalelor), rectificarea, modularea,integrarea, multiplicarea, filtrarea, eşantionarea, codificareaşi medierea semnalului .

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
69
În cazul în care impedanţa de ieşire a captorului devibraţii este mai mare decât cea de intrare a amplificatoruluide semnal se utilizează preamplificatoare care realizează şiadaptarea de impedanţă.
În cazul utilizării analizoarelor de frecvenţă numericesau calculatoarelor electronice în lanţul de măsurare se vorintroduce convertoare analog-numerice sau numeric-analogice, filtre “anti-alasing” a căror frecvenţă de tăiere estecorelată cu frecvenţa de eşantionare, memorii “ciclice” pentrurealizarea translaţiei în frecvenţă a datelor, circuite deponderare, circuite de mediere, etc.
După principiul de funcţionare captorii pentrumăsurarea vibraţiilor sunt de două feluri,:a. aparate cu punct fix sau cvasistatice care măsoară mişcarea
în raport cu un reper considerat fix;b. aparate seismice ce funcţionează după principiul “masă-
arc-amortizor” în mişcare relativă faţă de sistemulvibrator pe care se fixează.
În funcţie de traductorii folosiţi, captorii seismici pot fi:inductivi, rezistivi, capacitivi, piezoelectrici, electrodinamici .
În funcţie de mărimea măsurată captorii seismici pot fi:cinematici (pentru deplasări, viteze, acceleraţii) sau mecanici(pentru forţe cupluri, presiuni) .
3.3. Identificarea dinamică a sistemelorşi estimarea caracteristicilor dinamicePentru estimarea parametrilor modali ai sistemelor
mecanice (rădăcinile sau polii ecuaţiei caracteristice, formamodurilor proprii, coeficienţii de participare modală) s-au

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
70
dezvoltat şi perfecţionat în ultimii ani mai multe metode cefolosesc funcţiile de răspuns în frecvenţă sau funcţiile derăspuns în timp (time-history). Aceste funcţii sunt dependentede caracteristicile dinamice ale sistemului şi caracteristicilesemnalului de intrare.
Funcţia de răspuns în frecvenţă sau funcţia de transfer[H(jω)] este raportul dintre transformata Laplace a ieşirilor[X(jω)] şi cea corespunzătoare a intrărilor [F(jω)] :
[ ] { } { } { } { }∑=
−
+−
=N
r*r
t*r
*r
*r
r
trrr
jQ
jQ)j(H
1 λωψψ
λωψψω (3.1)
sau: [ ] [ ] [ ] [ ][ ] [ ]LIjV)j(H dd 1−−= Λωω (3.2)
în care termenii au următoarele semnificaţii:• rrr RPQ = - este factorul de scală;
• ;))((E
P N
,s
*srsr
r
sr
∏≠=
−−=
λλ
λλλλ1
1 E - constantă; (3.3)
• Rr o constantă, rezultând din: [ ]( ) { } { } trrrr RZadj ψψλ =)(
• { } rψ - vectorul modal corespunzător modului r;• rλ - rădăcinile ecuaţiei caracteristice (polii sistemului);• [ ] { } { } { } { } { } { }[ ]*
N**
N ......V ψψψψψψ 21121= matricea vectorilor modali;• [ ]dΛ matricea diagonală a polilor sistemului;• [ ]dI matricea unitate;• [ ] [ ] [ ] td VQL = matricea factorilor de participare modală (sau a coeficienţilor de influenţă modali).• [ ]dQ matricea a factorilor de scală ;

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
71
Funcţia de răspuns în frecvenţă [H(jω)] nu poateexprima în totalitate răspunsul structurii, datorită unor limităritehnice legate în principal de:a) numărul de noduri ai structurii Nm, (care este totdeauna mai
mic decât numărul de puncte de control sau ieşire No )b) numărul de puncte de control No (care este mai mic decât
numărul gradelor de libertate N);c) numărul de intrări Ni (care este mai mic decât numărul de
ieşiri No).În consecinţă dimensiunile matricilor din funcţia de
răspuns în frecvenţă [H(jω)] vor fi:
[ ] [ ] [ ] [ ][ ] [ ]immmmoio NNNN
ddNNNN LIjVjH ×
−
××× Λ−= 2
1
222)( ωω (3.4)
În cazul în care funcţia de răspuns se determină îninteriorul unei benzi de frecvenţe de interes, influenţelefrecvenţelor din afara acestei benzi se exprimă cu ajutorul:
a) matricii reziduală [LR] pentru frecvenţele de sub bandă
b) matricii reziduală [UR] pentru frecvenţele situate desuprabenzii de frecvenţe de interes.
În consecinţă funcţia de răspuns în frecvenţă [H(jω)] vaavea forma completă:
[ ]
[ ] [ ] [ ][ ] [ ] [ ] [ ]ioioimmmmo
io
NNNNNNNNdd
NN
xNN
LRURLIjV
jH
×××
−
×× −+Λ−=
=
22
1
2221
)(
ωω
ω(3.5)
Funcţia de răspuns în impuls [h(t)] este transformataLaplace inversă a funcţiei de transfer [H(p)] şi se scrie astfel:
[ ] { } { } { } { }( )∑=
+=N
r
tt*r
*r
*r
ttrrr
*rr eQeQ)t(h
1
λλ ψψψψ (3.6)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
72
sau: [ ] [ ][ ] [ ]LeV)t(h dtΛ= (3.7)
Răspunsul dinamic al unui sistem mecanic se obţine îngeneral prin suprapunerea mai multor moduri de vibraţie (saucomponente), fiecare dintre acestea fiind echivalent curăspunsul unui sistem cu un grad de libertate.
1. Dacă se face ipoteza că într-o bandă de frecvenţenumai un singur mod de vibraţie este predominant, parametriiacestui mod se vor fi determina separat.
Metodele de estimare a parametrilor bazate pe aceastăipoteză, se numesc metode cu un singur grad de libertate(SDOF) şi se aplică în special în cazul sistemelor decuplate.
În interiorul benzii de frecvenţe respective, se poateaproxima comportarea dinamică în funcţie de modulpredominant astfel:a. în domeniul timpului, prin funcţia de răspuns în impuls:
[ ] { } { } trr
tr Qe)t(h r ψψ λ= ; (3.8)
b. în domeniul frecvenţelor, prin funcţia de transfer:
[ ] { } { } [ ] [ ]LRURj
Q)j(Hr
trrr
2
1ωλω
ψψω −+−
= . (3.9)
2. Dacă se face ipoteza că într-o bandă de frecvenţenumai câteva moduri de vibraţie sunt predominante,parametrii acestor moduri se vor fi determina separat.
Metodele de estimare a parametrilor bazate pe aceastăipoteză se numesc metode cu mai multe grade de libertate(MDOF). În cazul în care se cunoaşte mărimea de intrare înpuncul j şi determină răspunsul în puncul i , funcţia de răspunsîn impuls hij este:

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
73
( )( )∑
∑
=
=
+=
+=
N
r
*rj
t*irrj
tirij
N
r
t*jr
*ir
*r
tjrirrij
LeLe)t(h
saueQeQ)t(h
*rr
*rr
1
1
λλ
λλ
ψψ
ψψψψ (3.10)
Din aceste relaţii se observă că:- polii λr sunt independenţi de intrarea i, respectiv ieşirea j,
în consecinţă ei se pot determina pentru fiecare funcţie derăspuns;
- coeficienţii modurilor proprii ψir sunt independenţi deintrările j;
- factorii de participare modală Lij sunt independenţi deieşirile i.
Metodele de identificare care iau în considerare osingură funcţie de timp, sau pentru care procesul este generatîn fiecare moment prin estimările unui singur parametru, senumesc metode de estimare locală. Ele prezintă dezavantajulcă estimarea finală se face în funcţie de un singur parametru .
Metodele de identificare care iau în considerare maimulţi parametri modali se numesc metode de estimare globalăşi prezintă dezavantajul că introduc unele erori de măsuraredatorită maselor accelerometrelor, deoarece pentru estimareaglobală este importantă consistenţa datelor de intrare.
Estimarea parametrilor modali folosind metodele cu maimulte intrări prezintă însă mai multe avantaje: astfel în cazulpolilor dubli, sau foarte apropiaţi (λk, λm) , aceştia nu pot fiseparaţi decât prin utilizarea acestor metode; întrucâtcoeficienţii de formă modali, sunt independenţi de modul deexcitaţie, aceste metode permit o estimare globală aparametrilor.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
74
În analiza modală cu mai multe intrări este necesară oseparare a polilor dubli sau foarte apropiaţi. Concentrândtermenii corespunzători locaţiei nr. 1 ai intrării nr.1 dinmatricea răspunsului în impuls se obţine:
{ } { } { }{ } { }( ) ......
......)(
11
111
+++≅
≅+++=t
mmkk
mt
mkt
k
r
mr
eLL
LeLethλ
λλ
ψψ
ψψ (3.11)
Se observă din această ecuaţie că valorile răspunsuluicorespunzător intrării 1 este o combinaţie a modurilor cuplatecorespunzătoare polilor foarte apropiaţi (λk, λm). Pentrucelelalte intrări diferă numai factorii de participare Lki, Lmi.
După tipul de model utilizat metodele de estimare aparametrilor modali pot fi:
• metodele de identificare cu model modal furnizează unrăspuns sub forma unei combinaţii liniare a soluţiilorcaracteristice a ecuaţiilor diferenţiale ale mişcării structurii.Problema se reduce la estimarea câtorva parametri modalinecunoscuţi din modelul deja cunoscut.
• metodele de identificare cu model direct utilizează chiarecuaţiile diferenţiale ale mişcării, şi necesită o cunoaştereprealabilă a naturii soluţiilor caracteristice; parametriimodali se determină în două etape: a) estimareaparametrilor (coeficienţilor) din ecuaţiile diferenţiale aleintrărilor-ieşirilor ; b) calculul parametrilor modali dinaceste estimări, de exemplu din analiza de valori propriipentru matricile estimate de mase, rigidităţi şi amortizări.
Ecuaţiile diferenţiale de bază ce caracterizează vibraţiaunei structuri în domeniul timpului se scriu sub forma:
[ ]{ } [ ]{ } [ ]{ } { }fxKxCxM =++ !!! (3.12)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
75
iar ecuaţiile derivate (aplicând transformarea Laplace) cecaracterizează vibraţia în domeniul frecvenţelor se scriu subforma:
[ ] [ ] [ ]( ){ } { })j(F)j(XKCjM ωωωω =++− 2 (3.13)
Introducând matricile :
[ ] [ ] [ ][ ] [ ] [ ] [ ] [ ]
[ ] [ ]
−=
=
KM
B;CMM
A0
00 (3.14)
ecuaţia diferenţială (3.12) se mai poate scrie în spaţiul stărilorsub forma sistemului matricial:
{ } [ ]{ } [ ]{ }{ } [ ]{ } [ ]{ }! (((( )))) (((( ))))
(((( )))) (((( ))))
x(t)
y(t)
= +
= +
AAAA xxxx tttt BBBB uuuu tttt
CCCC xxxx tttt DDDD uuuu tttt (3.15)
în care: { }x(t) este vectorul de stare;
{ }(t)x! vectorul tendinţei de modificare a stării;
{ }u(t) vectorul de intrare în sistem;
{ }y(t) vectorul de ieşire din sistem;
[ ]AAAA matricea transformării de stare;
[ ]BBBB matrice de intrare; [ ]CCCC matrice de ieşire;
[ ]DDDD matricea de transmitere directă, intrare-ieşire.
Ansamblul celor patru matrici [ [ ]AAAA , [ ]BBBB , [ ]CCCC , [ ]DDDD ] semai numeşte realizarea sistemului întrucât descrie răspunsulsistemului la orice moment, pentru un semnal de intrare dat.Realizarea sistemului depinde de alegerea intrărilor şiieşirilor;
Pentru sistemul dat, vectorul de intrare, de ieşire şi destare sunt respectiv:

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
76
{ }u(t) ={ }f t( ) ; (3.16)
{ }y(t) = { }x t( ) ; (3.17)
{ }x(t) =!( )
( )
x t
x t
. (3.18)
Matricile de realizare a sistemului sunt:
[ ]AAAA = [ ] [ ]− −A B1 ; [ ]BBBB = [ ][ ]M −
1
0; [ ]CCCC = [ ][ ][ ]0 I ; [ ]DDDD =[ ]0 ; (3.19)
Din punct de vedere al aplicabilităţii lor practice,metodele de estimare a parametrilor modali se deosebesc întreele prin următoarele criterii:
• criteriul numeric: metodele de estimare în domeniultimpului conduc la matrici mai bine condiţionate decât celedin domeniul frecvenţelor;
• criteriul bezilor de frecvenţă: în domeniul timpului estepreferabilă o bandă largă de frecvenţe, iar în domeniulfrecvenţelor este preferabilă o bandă îngustă; dacă efectulmodurilor proprii din afara benzii de frecvenţă esteimportant atunci este preferabilă analiza în domeniulfrecvenţelor (în special pentru estimarea formei modurilorproprii);
• criteriul amortizărilor: sistemele amortizate• criteriul naturii datelor măsurate.
3.4. Validarea modeluluiAceastă a patra fază în analiza modală experimentală
constă în aplicarea unor metode de evaluare a calităţiimodelului modal estimat anterior, în scopul construiriimodelului optim.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
77
Un prim nivel al validării modelului constă încompararea vizuală a formei modurilor proprii şi comparareafuncţiilor de răspuns în frecvenţă măsurate cu cele calculate pebaza modelului modal estimat (metode calitative).
Un al doilea nivel al validării modelului face apel launele mijloace matematice specifice (metode cantitative)pentru cuantificarea calităţii modelului estimat.
Cele mai utilizate metode sunt:a. metoda factorului de scală modal (MSF) şi criteriul de
asigurare modală (MAC);b. metoda participării modale (MP)c. metoda reciprocităţii funcţiilor de răspuns în frecvenţă;d. metoda valorii modale complexe (MOV);e. metoda coliniarităţii fazei modale (MPC) şi abaterii medii
a fazei (MPD);f. metoda factorului de incredere modal;g. metoda funcţiei de răspuns în frecvenţă sintetizată.
Un al treilea nivel al validării modelului în analizadinamică, constă în utilizarea datelor obţinute la validareamodelului pentru diferite analize suplimentare cum ar fi:1. analiza de sensibilitate, folosită în previziunea efectului
asupra structurii a diferitelor modificări ale parametrilor;2. “updating-ul” modelului şi analiza cu element finit.
Este evident faptul că succesul acestor analize depindede validarea corectă a modelului modal estimat. Un rolimportant în procesul de validare a modelului modalexperimental îl joacă verificarea calitativă a lanţului demăsurători (echipamente de calibrare, traductoare, cabluri,plăci de interfaţă, amplificatoare, analizoare, etc.).

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
78
a. Metoda factorului de scală modal (MSF) şicriteriul de asigurare modală (MAC)Acestea sunt metode de comparaţie a doi vectori
{ } { }X i Y[ , având acelaşi număr de elemente, [2] prin:• factorul de scară modal (MSF) care furnizează estimarea
celor mai mici pătrate ale raportului dintre cei doi vectori:
( ) { } [ ]{ }{ } [ ]{ } ,
YWYYWXY/XMSF t*
t*
= (3.20)
• criteriul de asigurare modală (MAC) este corespondentulfactorului de corelaţie: dacă valoarea acestuia este 1 cei doivectori sunt identici în limitele factorului de scară; dacăvaloarea lui este 0, între cei doi vectori nu există nici un felde relaţie liniară, iar factorul de scală modal estimat estenesemnificativ:
{ } [ ]{ }{ } [ ]{ }( ){ } [ ]{ }( )XWXYWY
YWXMAC t*t*
t*
XY
2
= (3.21)
unde: [ ]W este o matrice de pondere care de cele maimulte ori este matricea unitate [ ]IAstfel dacă se compară doi vectori proprii
{ } { }ψ ψr s, matricea de pondere fiind matricea unitate [ ]W = [ ]I
criteriul de asigurare modală se scrie :
{ } { }{ } { }
{ } { } { } { } ))((MAC
st*
srt*
r
st*
r
sr ψψψψ
ψψψψ
2
= (3.22)
Este evident faptul că dacă { } { } sr , ψψ sunt estimări aleaceluiaşi mod propriu de vibraţie , atunci criteriul de asiguraremodală este foarte aproape de 1; dacă { } { } sr , ψψ sunt estimăriale unor moduri proprii diferite, atunci criteriul de asiguraremodală este foarte aproape de 0. Aceast rezultat este în

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
79
concordanţă cu proprietatea de ortogonalitate a modurilorproprii de vibraţie.
Dacă se presupune că sistemul este cu amortizareproporţională şi se consideră matricea de pondere matriceamaselor: [ ]W = [ ]M respectiv matricea rigidităţilor [ ]W = [ ]K şise ţine seama de relaţiile binecunoscute:
[ ] [ ][ ] [ ] [ ] [ ][ ] [ ] dtdt kK;mM == ψψψψ (3.23) unde: [ ] { }{ } { }[ ]N...ψψψψ 21= , (3.24)atunci criteriul de asigurare modală trebuie să fie zero pentrumoduri proprii diferite de vibraţie.
b. Metoda participării modale (MP)Conform [73] această metodă permite stabilirea
următoarelor participări sau ponderi:a) ponderea diferitelor moduri proprii în răspunsul final;b) ponderea excitării diferitelor puncte de intrare:
∑=
=No
or,i,r,i AMP
10 (3.25)
unde : r,i,A0 - este reziduul pentru ieşirea o , intrarea i şimodul r ; o = 1. . . No - numărul ieşirii; i = 1. . . Ni -numărul intrării; r = 1. . . Nm- numărul modului propriu.
Astfel dacă se însumează după numărul de moduri proprii r:
∑∑∑===
=No
or,i,
N
r
N
rr,i AMP
mm
10
11 (i=1 . . . Ni ) (3.26)
se obţine contribuţia fiecărui mod de vibraţie în răspunsultotal; Dacă se însumează după numărul intrărilor i:

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
80
∑∑∑===
=No
or,i,
N
i
N
ir,i AMP
ii
10
11 (r=1 . . . Nm) (3.27)
se obţine ponderea pentru diferite excitaţii ale punctelor deintrare asupra răspunsului modului r.
Aceste informaţii ajută la alegerea celor mai eficaceexcitaţii de intrare. De asemenea această metodă oferăinformaţii pentru evaluarea altor metode de validare amodelelor modale.
c. Metoda reciprocităţii funcţiilor de răspunsîn frecvenţăAceastă metodă se bazează pe principiul reciprocităţii al
lui Maxwell. Acest principiu presupune simetria matricilor deinerţie, rigiditate, amortizare şi a funcţiei de răspuns înfrecvenţă. Pentru un astfel de sistem factorii de participaremodală sunt proporţionali cu coeficienţii modurilor proprii :
pr
rp
qr
rq LLψψ
= (3.28)
d. Metoda valorilor modale complexe (MOV)Această metodă se bazează pe principiul conform
căruia, prin adăugarea de mase în punctele de măsurare,frecvenţele proprii corespunzătoare tuturor modurilor devibraţie descresc.
Sensibilitatea sistemului de poli poate fi calculată dinparametrii modali; astfel pentru o pulsaţie proprie ωr asistemului amortizat, pentru o creştere a masei m, ∆Mmsensibilitatea sistemului se scrie:
( )rmrrm
r
m
r QImM
ImM
22ψλ∂∂λ
∂∂ω
−=
= (3.29)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
81
Valoarea supracomplexă modală (MOV) pentru un modpropriu r, se defineşte ca procentul din răspunsul sistemuluipentru care masa adăugată conduce la sensibilitate negativă afrecvenţei:
%100/1 1
= ∑ ∑
= =
o oN
o
N
oooror wswMOV (3.30)
unde: wo este factorul de pondere (egal cu 1 sau 2orψ )
sor =1 dacă sensibilitatea corespunzătoare frecvenţei r la adăugarea masei m în punctul o este negativă sau zero.
sor =0 dacă sensibilitatea este pozitivă.
e. Metoda coliniarităţii fazei modale - MPC şi abaterii medii a fazei -MPDConform [33] această metodă permite determinarea
gradului complex al unui mod r de vibraţie. Indicele decoliniaritate exprimă relaţia liniară funcţională între parteareală şi cea imaginară a (complexă) unui mod de vibraţie.
Pentru fiecare mod de vibraţie elementele vectoruluipropriu se determină scăzând din fiecare element valoareacomplexă medie a tuturor elementelor:
001
....1,/~ NiNoN
ooririr =
−= ∑
=
ψψψ (3.31)
Dacă se fac notaţiile :
{ } { }{ } { }( ) ( )2
22
12
εεεθψψψψ
ε ++=⋅
−= )(signarctan;~Im~Re
~Re~Im
rtr
rr , (3.32)
coliniaritatea fazei modale (MPC) pentru un mod propriu devibraţie, se exprimă cantitativ sub forma indicelui decoliniaritate:

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
82
{ } { } { }( )( ){ } { } 22
222 112
rr
rtrr
r ~Re~Im
/sin)(~Im~Re~ReMPC
ψψ
εθεψψψ
+
−+⋅+= (3.33)
Pentru sistemele reale acest indice este aproape egal cu 1.
Abaterea medie a fazei (MPD) pentru un mod propriude vibraţie se exprimă cantitativ sub forma indiceluicomplexităţii statistice :
= ∑∑
==
oo N
oo
N
ooror wwMPH
11
/ϕ (3.34)
unde : wo este factorul de pondere (egal cu 1 sau 2orψ )
≤+
≥=
0
0
)Im()Re(arctandaca
)Im()Re(arctan
)Im()Re(arctandaca
)Im()Re(arctan
or
or
or
or
or
or
or
or
or
ψψπ
ψψ
ψψ
ψψ
ϕ (3.35)
Abaterea medie pătratică corespunzătoare acestuiindice arată dispersia fazelor pentru diferite moduri proprii:
∑∑==
−=
oo N
oo
N
ororor w/)MPH(wMPD
11
2ϕ . (3.36)
f. Metoda factorului de încredere modalA fost introdusă de IBRAHIM [30] prin generarea de
pseudo-măsurători în cadrul tehnicii estimărilor parametrilorîn domeniul timpului. Aceste pseudo-măsurători sunt semnalefizice actualizate ale semnalelor decalate cu ∆t.Funcţia de răspuns a impulsului în domeniul timpului se scrie:
[ ] [ ] [ ] [ ]LeV)t(h dtΛ= (3.37)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
83
unde: [ ] { } { } { } { } { } { }[ ]*N
**N ......V ψψψψψψ 21121= este matricea
vectorilor modali; [ ]Λ d , matricea diagonală a polilor sistemului;
[ ]e t dΛ matricea diagonală exponenţială a polilorsistemului;
[ ] [ ] [ ] td VQL = matricea factorilor de participaremodală (a coeficienţior de influenţă modali).
Funcţia de răspuns a impulsului decalată cu ∆t este:
[ ] [ ] [ ] [ ] [ ][ ] [ ] [ ]LeeVLeV)t(h dtdtd)tt( Λ∆Λ∆Λ == + (3.38)
Introducând matricea extinsă a vectorilor modali:
[ ]
=
dteV
V
V~V
Λ∆ (3.39)
fiecare mod fizic se poate scrie sub următoarea formă:{ } { } t
rrre~ ∆λψψ = (3.40)
Factorul de încredere modal se exprimă prin :{ } { }{ } { }
t
rtr
rtr
rre
~MCF ∆λ
ψψψψ −= (3.41)
şi este egal cu 1 în cazul modurilor fizice, iar în cazulmodurilor complexe este mult mai mic. Conform [43] aceastămetodă este o extindere a metodei celor mai mici pătratecomplexe exponenţiale.
g. Metoda funcţiei sintetizate de răspuns înfrecvenţăPe baza funcţiei de răspuns în frecvenţă (de transfer):
[ ] { } { } { } { }∑=
−
+−
=N
r*r
t*r
*r
*r
r
trrr
jQ
jQ)j(H
1 λωψψ
λωψψω (3.42)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
84
se poate calcula o funcţie între oricare două grade de libertate,numită funcţie sintetizată de răspuns în ferecvenţă.
De aici rezultă că validitatea unui model estimat poate fiverificată comparând funcţia sintetizată de răspuns înfrecvenţe cu funcţia de răspuns în frecvenţe măsurată(originală).
Pentru a face cantitativ această comparaţie se defineştecoeficientul de corelaţie a funcţiilor de răspuns (MACHH) -similar cu criteriul de asigurare modală (MAC):
{ } [ ]{ }{ } [ ]{ } { } [ ]{ } )HWH)(HWH(
HWHMAC t*t*
t*
HH
2
= (3.43)
unde: { }H este vectorul răspunsului în frecvenţă măsuratH(ωf), { }H este vectorul răspunsului în frecvenţăsintetizat.
3.5. Utilizarea parametrilor modaliParametrii modali determinaţi (frecvenţele de
rezonanţă, factorii de amortizare, vectorii modali, factorii departicipare modală) odată validaţi conform metodelorprezentate anterior se pot utiliza în scopul reproiectării,optimizării din punct de vedere al comportării dinamice(analiză), sau studiului comportării dinamice a stucturii îndiferite ansamble (sinteză).
În funcţie de scopul urmărit, se pot deosebi următoareledomenii de analiză şi sinteză:! analiza răspunsului în forţe - atunci când interesează
comportarea dinamică a sistemului supus la diferite stări deîncărcare (sau forţe din exploatare) punându-se întrebăricum ar fi:

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
85
“Care este acceleraţia maximă în punctele aracteristice?“,”Care rezonanţe domină răspunsul?”,“Cum se deformează structura pentru diferite frecvenţeproprii?”;
! analiza de sensibilitate - atunci când intereseazăcomportarea dinamică a sistemului supus la diferitemodificări structurale (modificări constuctive, amaterialelor, etc.) punându-se întrebări cum ar fi:“Care rezonanţe sau moduri proprii se schimbă atunci cândse operează astfel de modificări?”,“Care sunt punctele celemai sensibile în care se pot opera modificări în scopulmodificării uneia sau mai multe dintre rezonanţe?”;
! sinteza modificărilor dinamice structurale şi de asamblare- atunci când interesează comportarea dinamică asistemului pentru diferite modificări ale subansamblelor(având caracteristici dinamice cunoscute) şi modul deintegrare a lor în diferite ansamble .
Întrucât aceşti termeni nu pot fi totdeauna măsuraţicorect, ei nu pot fi incluşi în analiza răspunsului în forţe. Deaceea se recomandă utilizarea modelelor cu bandă largă defrecvenţe, incluzând cel puţin câteva frecvenţe situatedeasupra benzii de frecvenţe şi câteva frecvenţe situate subbandă.
De asemenea există şi alte cauze de erori, cum ar fi:neexcitarea modelului pentru toate frecvenţele de interes(aceasta se poate întâmpla de exemplu în cazul excităriistructurii într-un singur punct), când unul sau mai multemoduri de vibraţie pot fi omise dacă această excitaţie se faceîntr-un punct nodal pentru modul respectiv.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
86
a. Analiza în forţeEste tehnica prin care se determină comportarea
dinamică a structurii pentru diferite variaţii ale încărcărilorexterioare. Analiza în forţe este capabilă să determine anumiţiparametri caracteristici unei solicitări dinamice cum ar fi:• acceleraţiile nodurilor;• frecvenţele proprii dominante ale răspunsului pentru
diferite moduri de încărcare;• deformaţiile corespunzătoare fiecărui mod propriu de
vibraţie.
b. Analiza de sensibilitateEste tehnica prin care se determină rata schimbărilor
parametrilor modali (cum ar fi: masa, amortizarea saurigiditatea) pe baza dezvoltării Taylor, folosind unul (sau doi)din termenii acestei dezvoltări.
Analiza de sensibilitate este capabilă să determine ceamai bună localizare a modificărilor şi de asemenea dă o primăestimare a cantităţii cu care trebuie modificat parametrulrespectiv. Ecuaţia diferenţială generală a mişcării unuisistem se scrie:
[ ]{ } [ ]{ } [ ]{ } { }fxKxCxM =++ !!! (3.47)
Conform [22] în domeniul Laplace aceasta se scrie:
[ ] [ ] [ ]( ) ( ){ } ( ){ }( )[ ] ( ){ } ( ){ }pFpXpZ
pFpXKCpMp=
=++2
(3.48)
Această ecuaţie se mai poate scrie sub forma matricialăextinsă echivalentă:
[ ] [ ]( ){ } { }'FYBAp =+ (3.49)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
87
unde:
[ ] [ ] [ ][ ] [ ] [ ] [ ] [ ]
[ ] [ ]
{ } { }{ } { } { }
{ }
=
=
−=
=
F'F
XXp
Y
KM
BCMM
A
0
000
(3.50)
Ecuaţia corespunzătoare de valori proprii este:[ ] [ ]( ){ } { }0=+ YBAp (3.51)
şi conduce la următoarele valori şi vectori proprii:iiiiii jj ωσλωσλ −=+= *; (3.52)
{ } { }{ }
=i
iii ψ
ψλΦ , (3.53)
care reprezintă coloanele matricii extinse [ ]Φ .
Se consideră ecuaţia de valori proprii corespunzătoare lui λi:[ ] [ ]( ){ } { }0=+ ii BA Φλ (3.54)
Dacă se multiplică aceasta la stânga cu { } tiΦ şi se obţine:
{ } [ ] [ ]( ){ } 0=+ iiti BA ΦλΦ (3.55)
Derivând această ecuaţie în raport cu u se obţine:{ } [ ] [ ]( ){ } { } [ ] [ ]( ){ }
{ } [ ] [ ]( ) { } 0=++
++
++
uBA
uBABA
u
ii
ti
iit
iii
ti
∂Φ∂λΦ
Φ∂
λ∂ΦΦλ∂Φ∂
(3.56)
Ţinând seama că:
{ } { } 0==uu
tii
∂Φ∂
∂Φ∂ , ecuaţia (3.56) devine:
{ } [ ] [ ]( ){ } 0=+i
iti u
BA Φ∂
λ∂Φ (3.57)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
88
sau: { } [ ] [ ] [ ] { } 0=
++ ii
iti u
BuAA
uΦ
∂∂
∂∂λ
∂∂λΦ (3.58)
Ţinând seama de relaţiile de ortogonalitate :
[ ] [ ][ ] [ ][ ] [ ][ ] [ ] dt
dt
bB
aA
=
=
ΦΦ
ΦΦ (3.59)
rezultă din relaţia (3.58) sensibilitatea sistemului de poli la oschimbare a parametrului u:
{ } [ ] [ ] { } iiti
i
i
uB
uA
auΦ
∂∂
∂∂λΦ
∂∂λ
+−= 1
(3.60)
Deoarece vectorii proprii definesc o bază în spaţiulvectorial 2N x 2N, sensibilitatea vectorilor proprii se poatescrie sub forma unei combinaţii liniare:
{ } { } i
N
rir
i gu
Φ∂Φ∂ ∑
==
2
1 (3.61)
Derivând ecuaţia (3.54) şi ţinând seama de (3.61) se obţine:
[ ] [ ]( ) { } [ ] [ ]( ){ } 02
1=++
+ ∑
=i
iN
rriri u
BAgBA Φ∂
λ∂Φλ (3.62)
Dacă se multiplică aceasta la stânga cu { }Φ it şi se ţine
seama de condiţiile de ortogonalitate (3.59) se obţine:
• pentru i≠m
{ } [ ] [ ]( ){ } { } [ ] [ ]( ){ } 0=+++ iit
mmitmim u
BABAg Φ∂
λ∂ΦΦλΦ (3.63)
sau:
( ) { } [ ] [ ] [ ] { } 0=Φ
++Φ−− ii
itmmimim uu
AAu
ag∂
∂∂
∂λ∂∂λλλ B (3.64)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
89
sau: { } [ ] [ ] { } iitm
mmiim uu
Aa
g Φ∂
∂∂
∂λΦλλ
+
−= B11 (3.65)
• pentru i=m se obţine: { } [ ] { } iti
iii u
Aa
g Φ∂
∂Φ
−=
21
(3.66)
Înlocuind în relaţia (3.61) expresiile (3.65) şi (3.66), seobţine sensibilitatea vectorilor proprii cu ajutorul relaţiei:
{ } { } [ ] { } { }
{ } [ ] [ ] { } { } riiti
r
N
irr ir
iiti
i
i
uB
uA
a
uA
au
ΦΦ∂
∂∂
∂λΦλλ
ΦΦ∂
∂Φ∂Φ∂
+
−+
+
−=
∑≠=
1121
2
1
(3.67)
În termenii matricilor de masă , amortizare , rigiditateşi ai vectorilor proprii iniţiali (neextişi) aceste sensibilităţi (asistemului de poli (3.60) şi a vectorilor proprii(3.61)) devin:
{ } [ ] [ ] [ ] { } iiiti
i
i
uK
uC
uM
auψ
∂∂
∂∂λ
∂∂λψ
∂∂λ
++−= 21
(3.68)
respectiv:
{ } { } [ ] [ ] { } { }
{ } [ ] [ ] [ ] { } { } riiiti
r
N
irr ir
iiiti
i
i
uK
uC
uM
a
uC
uM
au
ψψ∂
∂∂
∂λ∂
∂λψλλ
ψψ∂
∂∂
∂λψ∂ψ∂
++
−+
+
+−=
∑≠=
22
1
11
221
(3.69)
Pentru diferite modificări simple (locale) ale maselor,amortizării vâscoase liniare sau rigidităţilor elementelorelastice, sensibilităţile devin:
• pentru parametrul u, ca masă locală corespunzătoaremodului de vibraţie k:

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
90
{ } [ ] { }
r
jrkrN
irr ir
ikiji
i
kii
k
ji
i
kiii
ki
ti
ik
i
aam
amM
amψψ
λλλψψψλ
∂∂ψ
ψλψ∂
∂λψ∂∂λ
∑≠= −
+−=
−=
−=
2
1
22
2221
(3.70)
• pentru parametrul u ca amortizare vâscoasă liniară întregradele de libertate k şi l: (3.71)
r
jrlrkrN
irr ir
ilikiji
i
liki
kl
ji
i
likii
kl
i
a)(
)(a
)(c
a)(
cψψψ
λλλψψψψψ
∂∂ψ
ψψλ∂∂λ
−−
−+−−=
−−=
∑≠=
2
1
2
2
21
• pentru parametrul u ca rigiditate liniară între gradele delibertate k şi l:
r
jrlikiN
irr ir
likikl
ji
i
liki
kl
i
a)(
)(k
a)(
kψψψ
λλψψ
∂∂ψ
ψψ∂∂λ
−−
−=
−−=
∑≠=
2
1
2
1 (3.72)
La aceleaşi rezultate se poate ajunge folosind altemetode , conform [67], [40] şi [3].
Analiza de sensibilitate este deosebit de utilă înmodelarea cu elemente finite (în faza de postprocesare) înprogramele de analiză dinamică structurală şi de optimizare,ca o fază necesară în tehnica de ajustare “updating” sau învalidarea modelui sau pentru compensarea efectului maseloraccelerometrelor utilizate în timpul măsurătorilor.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
91
c. Sinteza modificărilor dinamice structuraleşi de asamblareEste un set de tehnici care prevăd comportarea dinamică
a unui sistem, pe baza modificărilor unui sistem cunoscut saua unui sistem pe baza modificărilor parametrilor subsistemelor(componentelor). Cele mai importante sunt:1. tehnica sintezei modale - este cea mai simplă metodă şi se
bazează pe transformarea în coordonate modale;2. tehnica flexibilităţii dinamice - estimează modificări ale
comportării dinamice din punct de vedere al variaţiei cuanumiţi parametri ai funcţiei de răspuns în frecvenţă);
3. tehnica rigidităţii dinamice - estimează modificări alecomportării dinamice din punct de vedere al rigidităţiidinamice.
c.1. Tehnica sintezei modaleDându-se ecuaţia mişcării unui sistem în spaţiul Laplace
în termenii matricilor extinse:[ ] [ ]( ){ } { } ;'FYBAp =+ (3.72)
unde:[ ] [ ] [ ]
[ ] [ ] [ ] [ ] [ ][ ] [ ]
{ } { }{ } { } { }
{ }
=
=
−=
=
F'F
XXp
Y
,K
MB
CMM
A
0
000
(3.73)
Folosind transformarea de coordonate:{ } [ ]{ }qY Φ= (3.74)unde: [ ]Φ este matricea extinsă a vectorilor proprii:
[ ] { } { } { }[ ]Φ Φ Φ Φ= 1 2 ... N ,

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
92
iar: { } { }{ }Φ i
i i
i
=
λ ψψ (3.75)
Multiplicând la stânga relaţia (3.72) cu [ ]Φ t, se obţine:
[ ] [ ][ ] [ ] [ ][ ]( ){ } [ ] { }'FqBAp ttt ΦΦΦΦΦ =+ (3.76)
sau: [ ] [ ]( ){ } [ ] { }'Fqbap tdd Φ=+ (3.77)
adică ecuaţia corespunzătoare unui sistem decuplat, unde { }qeste vectorul coordonatelor modale.
Dimemnsiunea sistemului decuplat depinde de numărulde moduri proprii care se iau în considerare. Dacă toatemodurile proprii sunt cunoscute, transformarea de coordonatenu va duce la nici un fel de pierderi de informaţie.
• Sinteza modală pentru diferite modificări ale structurii Acestea pot fi exprimate ca modificări ale matricilor demasă, de amortizare sau de rigiditate [ ][ ][ ] )K,C,M( ∆∆∆ sau camodificări în termenii matricilor extinse [ ][ ] )B,A( ∆∆ .
Pentru aceste modificări, ecuaţia mişcării în spaţiulLaplace în termenii matricilor extinse este:
[ ] [ ]( ) [ ] [ ]( )( ){ } { }'FYBBAAp =+++ ∆∆ (3.78)
Aplicând transformarea în coordonate modale se obţine:
[ ] [ ][ ] [ ] [ ][ ][ ] [ ][ ] [ ] [ ][ ]( ){ } [ ] { } ;'FqBBApAp ttttt ΦΦ∆ΦΦΦΦ∆ΦΦΦ =++ (3.79)
sau: [ ] [ ]( ) [ ] [ ]{ }{ } [ ] { }'Fqbbaap tdd Φ∆∆ =++ (3.80)
unde: [ ] [ ] [ ][ ]Φ∆Φ=∆ Aa t şi [ ] [ ] [ ][ ]Φ∆Φ=∆ Bb t sunt douămatrici nediagonale.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
93
Problema de valori proprii corespunzătoare este :
[ ] [ ]( ) [ ] [ ]{ }{ } { }0=++ qbbaap dd ∆∆ (3.81)
şi conduce la modificarea sistemului de poli [ ]dmodΛ şi a
vectorilor proprii în coordonate modale [ ]modrq . O substituţie aacestor noi vectori proprii în transformarea de coordonate(3.74), conduce la matricea extinsă modificată a vectorilorproprii:
[ ] [ ][ ][ ] [ ]
[ ][ ] [ ]
[ ] [ ]modr
d
mod
dmodmod
modrmod
qV
VV
V
q
=
=
ΛΛ
ΦΦ
(3.82)
• Sinteza modală pentru asamblarea flexibilă a structurilorSe consideră două sisteme caracterizate de următoarele
ecuaţii în spţiul Laplace şi în termenii matricilor extinse:[ ] [ ]( ){ } { }[ ] [ ]( ){ } { } ;'FYBAp
'FYBAp
2222
1111
=+=+
(3.83)
care se pot scrie sub forma globală:
[ ] [ ][ ] [ ]
[ ] [ ][ ] [ ]
{ }{ }
{ }{ }
=
+
2
1
2
1
2
1
2
1
00
00
'F'F
YY
BB
AA
p (3.84)
deci asamblarea flexibilă a celor două sisteme 1 şi 2 nureprezintă nimic altceva decât o modificare a sistemului global(3.72), pentru care rămân valabile relaţiile din paragrafulprecedent (de modificări ale structurii).
• Sinteza modală pentru asamblarea rigidă a structurilorAcest caz este mai complex decât cel corespunzător
asamblării flexibile, deoarece o conexiune rigidă a două (saumai multe) sisteme implică legături stricte între gradele de

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
94
libertate corespunzătoare. În plus, numărul total alrezonanţelor va fi redus datorită acestor conexiuni: el va fiegal cu suma numărului rezonanţelor celor două (sau maimulte) sisteme minus numărul de conexiuni.
Dacă se foloseşte transformarea de coordonate:
{ }{ }
[ ] [ ][ ] [ ]
{ }{ }
=
2
1
2
1
2
1
00
YY
ΦΦ
(3.85)
în ecuaţiile sistemului global (3.84), se obţine ecuaţiamatricială globală:
[ ] [ ][ ] [ ]
[ ] [ ][ ] [ ]
{ }{ }
[ ] [ ][ ] [ ]
{ }{ }
=
+
2
1
2
1
2
1
2
1
2
1
00
00
00
'F'F
bb
aa
pΦ
Φ (3.86)
sau : [ ] [ ]( ){ } [ ] { }'Fqbap tdd Φ=+ (3.87)
Impunând condiţiile corespunzătoare legăturilor rigide,care se scriu sub forma generală:
[ ] { }{ } { }0
2
1 =
YY
R , (3.88)
sau: [ ] [ ] [ ][ ] [ ]
R 00
0
2
1
1
1 =
Φ
Φ (3.89)
sau sub forma echivalentă: [ ] { }{ } { }0
2
1 =
T (3.90)
Datorită acestor condiţii nu toate coordonatele modaleqi sunt independente, deci se pot separa în două grupe: { }dqmatricea coloană a coordonatelor modale dependente şi { }iq acoordonatelor modale independente; de asemenea matricealegăturilor modale [ ]T se poate separa în două submatricicorespunzătoare acestor coordonate:

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
95
[ ] [ ][ ][ ]id TTT = . (3.91)
Dacă se exprimă vectorul coordonatelor dependente dinecuaţia matricială de mai sus se obţine:
{ } [ ] [ ]{ }iidd qTTq 1−−= (3.92)
Dacă se exprimă vectorul tuturor coordonatelor înfuncţie de coordonatele independente se obţine formaechivalentă:
{ }{ }
[ ] [ ][ ] { } [ ]{ }ii
id
i
d q'TqI
TTqq
=
−=
−1
(3.93)
Ecuaţia asamblării în coordonate modale (3.87), devine:[ ] [ ]( )[ ]{ } [ ] { }'' FqTbap t
idd Φ=+ (3.94)
sau multiplicând la stânga cu matricea transpusă [ ]tT se obţine:
[ ] [ ] [ ] [ ] [ ] [ ]( ){ } [ ] [ ] { }'''''' FTqTbTTaTp tti
dtdt Φ=+ (3.95)
Problema de valori proprii corespunzătoare :[ ] [ ] [ ] [ ] [ ] [ ]( ){ } { }0'''' =+ i
dtdt qTbTTaTp (3.96)conduce la sistemul de poli [ ]d
rigΛ al asamblării rigide astructurii şi la vectorii proprii [ ]rigiq în coordonate modale.
C.2. Tehnica flexibilităţii dinamiceTehnica flexibilităţii dinamice estimează comportarea
dinamică a unui sistem modificat sau a unui ansamblu desisteme pe baza funcţiei de răspuns a sistemului original.
• Tehnica flexibilităţii dinamice pentru cazul modificărilorstructurale
Ecuaţia mişcării pentru un sistem original, în spaţiulLaplace se scrie:

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
96
[ ] [ ] [ ]( ) ( ){ } ( ){ }pFpXKCpMp =++2 (3.97)sau:
( )[ ] ( ){ } ( ){ }( ){ } ( )[ ] ( ){ }pFpHpX
pFpXpZ=
= (3.98)
unde: ( )[ ]pZ este matricea rigidităţii dinamice în spaţiul Laplace
( )[ ]pH este funcţia de transfer sau matricea flexibilităţiidinamice în spaţiul LaplaceEcuaţia matricială evidentă :
( )[ ] ( )[ ] [ ] dIpZpH =⋅ (3.99)
pentru un sistem modificat se scrie:
[ ] [ ] [ ] dmm IZH =⋅ (3.100)
Modificarea matricii rigidităţii dinamice a structurii[ ]mZ poate fi rezultatul variaţiei cu [ ]Z∆ a matricii rigidităţiidinamice ( )[ ]pZ :
[ ] [ ] [ ]( ) [ ]dm IZZH =+⋅ ∆ (3.101)
Multiplicând ecuaţia (3.101) la dreapta cu [ ]H şi ţinândseama că : [ ] [ ] [ ] dIHZ =⋅
se obţine: [ ] [ ] [ ][ ]( ) [ ]HHZIH dm =+⋅ ∆ (3.102)
sau [ ] [ ][ ] [ ][ ]( ) 1−+= HZIHH d
m ∆ (3.103)
Acastă ecuaţie exprimă matricea flexibilităţii dinamice astructurii modificate ca funcţie de matricea flexibilităţiidinamice a structurii originale [ ]H si matricea de variaţie arigidităţii dinamice [ ]Z∆ .
Întrucât nu toate gradele de libertate sunt supusemodificărilor, dacă se notează cu c indicele care se referă la

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
97
gradele de libertate ale structurii implicate în modificări, cu findicele care se referă la celelalte grade de libertate careinteresează în analiza dinamică, atunci matricea flexibilităţiidinamice a structurii se scrie sub forma:
[ ] [ ] [ ][ ] [ ]
=
cccf
fcff
HHHH
H (3.104)
respectiv, a structurii modificate:
[ ] [ ] [ ][ ] [ ]
=
mccmcf
mfcmffm HH
HHH (3.105)
Ecuaţia (3.103) se mai scrie: [ ] [ ][ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ][ ] [ ]
1
000
00
−
+
=
cccf
fcff
cccc
ff
cccf
fcff
mccmcf
mfcmff
HHHH
ZII
HHHH
HHHH
∆
(3.106)iar ecuaţia (3.102) se mai scrie:
[ ] [ ][ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ][ ] [ ]
[ ] [ ][ ] [ ]
=
+
cccf
fcff
cccf
fcff
cccc
ff
mccmcf
mfcmff
HHHH
HHHH
ZII
HHHH
∆000
00
(3.107)Ultima ecuaţie matricială permite determinarea
matricilor corespunzătoare gradelor de libertate care suferămodificări , după cum urmează:
[ ] [ ] [ ] [ ] [ ][ ]( ) [ ][ ][ ] [ ] [ ] [ ] [ ][ ]( )[ ] [ ] [ ] [ ][ ]( ) 1
1
1
−
−
−
+=
+==
+−=
ccccccccmcc
ccccccfcmcfmfc
cfccccccccfcffmff
HZIHH
HZIHHH
HZHZIHHH
∆
∆
∆∆
(3.108)
Aceste ecuaţii se aplică pentru fiecare mod de vibraţiecare interesează. Ele indică faptul că pentru determinarearăspunsului structurii modificate este suficient dacă secunoaşte răspunsul structurii originale în punctele de interesnotate cu indicele c şi f . De asemenea ele indică faptul că

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
98
efortul pentru inversarea matricii [ ] [ ][ ]( )HZI d ∆+ este mult maimic dacă se produc anumite modificări simple cum ar fi :1. modificări corespunzătoare gradelor de libertate cu indicele
c din matricea maselor cM∆ ; elementul Hmpq al matricii[ ]mffH se scrie:
ccc
pqcpqpq
ccc
cqpcpqmpq HM
H)M(HH
H)M(HH
HH+−
+=+−
−= − ∆ω∆ω
∆ω 2
2
12 1 (3.109)
2. modificări corespunzătoare gradelor de libertate cu indicele
c şi d din matricea rigidităţilor [ ]
−
−=
1111
cdcc KZ ∆∆ ;
elementul Hmpq al matricii [ ]mffH se scrie:
( )( )dccccdddcd
pdpcdqcqpqmpq HHHHK
HHHHHH
−+−+−−
−= −1∆ (3.110)
3. modificări corespunzătoare gradelor de libertate cu indicelec din matricea amortizărilor .
• Tehnica flexibilităţii pentru cazul cuplării flexibile astructurilorAcest caz poate fi considerat ca o extensie a cazului
precedent în care sistemul original constă din cele două (saumai multe) structuri decuplate notate cu 1 şi 2: dacă p, q, csunt indicii gradelor de liberate ale structurii 1 şi d indicelegradelor de liberate ale structurii 2, atunci întrucât pentrustructurile originale avem: H dq= H pd=H cd=H dc=0 , relaţia(3.110) devine:
ccddcd
pccqpqmpq HHK
HHHH
++−= −1∆
(3.111)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
99
• Tehnica flexibilităţii pentru cazul cuplării rigide astructurilor
Acest caz poate fi considerat un caz particular alstructurilor cuplate flexibil în care 01 →∞→ −
cdcd K,K ∆∆ ,
iar ecuaţia (3.111) devine:
ccdd
pccqpqmpq HH
HHHH
+−= (3.112)
Un caz particular al cuplării rigide îl constitue fixareastructurii de mediul fix (rigid) sau încastrarea; în acest cazH dd=0 şi relaţia (3.112) devine:
cc
pccqpqmpq H
HHHH −= (3.113)
C.3. Tehnica rigidităţii dinamiceAceastă metodă estimează comportarea dinamică a
sistemelor modificate sau asamblate pe baza datelordisponibile pentru sistemele originale. Rezultă o modificare amatricii de rigiditate dinamică: [ ] [ ] [ ]ZZZ m ∆+= . Această metodăa fost dezvoltată de Klostermann [35[.
Rezultatele ezperimentale ale măsurătorilor sunt îngeneral în temenii matricilor funcţie de răspuns în frecvenţă.Inversarea acestor matrici este punctul cel mai critic înaplicarea metodei cu datele măsurate. Utilizarea directă amăsurătorilor în frecvenţă nu se recomandă. Klostermannrecomandă utilizarea funcţiilor de răspuns în frecvenţăsintetizate din modelul modal estimat experimental. Chiar şi înaceste condiţii inversarea matricii flexibilităţii [ ]H , ridicăserioase probleme.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
100
Acurateţea modelului modal este condiţia de bază a uneianalize corecte, iar numărul modurilor proprii ale modeluluitrebuie să fie suficient de mare pentru a se evita problemelesingulare. Mai mult, aceste inverse trebuiesc calculate pentrufiecare frecvenţă.
• Tehnica rigidităţii dinamice pentru cazul cuplăriiflexibile a structurilor
Acest caz este similar cu metodele de sinteză modală şide flexibilitate dinamică prezentate anterior, fiind o extensie acazului modificării structurale în care sistemul original constădin combinaţia a două componente structurale 1 şi 2:
[ ] [ ] [ ][ ] [ ]
=
2
1
00Z
ZZ (3.114)
Cuplarea flexibilă este deci schimbarea acesteimatrici [ ]Z∆ prin conectarea lui [ ]1Z şi [ ]2Z .
• Tehnica rigidităţii dinamice în cazul cuplării flexibile astructurilor
Dacă se notează cu c indicele care se referă la gradelede libertate ale structurii implicate în cuplare, cu f indicelecare se referă la celelalte grade de libertate care interesează înanaliza dinamică, atunci matricile rigidităţii dinamice astructurii se scriu sub forma:
[ ] [ ] [ ][ ] [ ] [ ] [ ] [ ]
[ ] [ ]
=
=
cccf
fcff
cccf
fcff
ZZZZ
Z,ZZZZ
Z22
222
11
111 (3.115)
iar (3.48) se scrie:

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
101
[ ] [ ][ ] [ ]
{ }{ }
{ }{ }
[ ] [ ][ ] [ ]
{ }{ }
{ }{ }
=
=
c
f
c
f
cccf
fcff
c
f
c
f
cccf
fcff
FF
XX
ZZZZ
,FF
XX
ZZZZ
2
2
2
2
22
22
1
1
1
1
11
11
(3.116)
Dacă se introduc condiţiile suplimentare de echilibru: { } { } { }021 =+ cc FF (3.117)
şi de compatibilitate caracteristice legăturilor rigide:{ } { } { } ccc XXX == 21 , (3.118)
se obţine ecuaţia matricială care descrie comportareasistemului ca ansamblu rigid:
[ ] [ ] [ ][ ] [ ] [ ] [ ][ ] [ ] [ ]
{ }{ }{ }
{ }{ }
{ }
=
+
f
f
f
c
f
fffc
cfcccccf
fcff
F
F
XXX
ZZZZZZ
ZZ
2
1
2
1
22
2211
11
00
0
(3.119)
C.4. Tehnica sintezei componentelor modaleAceastă metodă este similară metodei de sinteză modală
prin care coordonatele fizice se transformă în coordonatemodale şi constă din următoarele două faze:
• definirea transformării prin care setul de coordonateoriginale ale gradelor de libertate ale fiecărei sustructuri setransformă în într-un set redus de coordonate generale;
• asamblarea substructurilor prin tehnicile de asamblarespecifice în termenii noilor coordonate generale.
Se consideră în continuare un ansamblu format din douăsustructuri 1 şi 2, fiecare dintre ele fiind descrisă de ecuaţiileîn spaţiul Laplace în termenii matricilor extinse:

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
102
[ ] [ ]( ){ } { }[ ] [ ]( ){ } { }'FYBAp
,'FYBAp
2222
1111
=+=+
(3.120)
prin transformarea în coordonate generale:{ } [ ]{ }{ } [ ]{ }222
111
gYgY
ΓΓ
== (3.121)
unde: { }{ }21 Y,Y sunt vectorii coordonatelor fizice ale celor douăsubstructuri;{ }{ }21 g,g ,vectorii coordonatelor generale ale celor douăsubstructuri;{ }{ }21 ΓΓ , matricile de transformare modală ale cărorcoloane pot fi: vectorii modurilor proprii, aiconstrângerilor exterioare, ai modurilor de fixarereziduale, ai modurilor proprii de vibraţii de corp rigid.Vectorii coordonatelor generale conţin coordonate
modale şi coordonate fizice corespunzătoare gradelor delibertate ale legăturilor sau alte grade de interes. Se multiplicăecuaţia vectorială (3.120) la stânga cu { } { } tt respectiv, 21 ΓΓ şiţinând seama de (3.121) se obţine:
[ ] [ ][ ] [ ] [ ][ ]( ){ } [ ] [ ]( ){ } [ ] { }[ ] [ ][ ] [ ] [ ][ ]( ){ } [ ] [ ]( ){ } [ ] { } ,'FgbapgBAp
,'FgbapgBApttt
ttt
222222222222
111111111111
ΓΓΓΓΓ
ΓΓΓΓΓ
=+=+
=+=+
(3.122)Cele două ecuaţii se pot scrie sub formă unitară:
[ ] [ ][ ] [ ]
[ ] [ ][ ] [ ]
{ }{ }
[ ] [ ][ ] [ ]
{ }{ }
=
+
'F'F
gg
bb
aa
pt
2
1
2
1
2
1
2
1
2
1
00
00
00
ΓΓ
(3.123)
sau: [ ] [ ]( ){ } [ ] { }'Fgbap tΓ=+ (3.124)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
103
Condiţiile de compatibilitate a legăturilor în punctele deconexiune (c) se scriu: { } { }cc YY 21 = şi condiţiile de continuitatea forţelor pe interfaţa dintre cele două substructuri în punctelede conexiune (c) se scriu: { } { }cc FF 21 = . În termeniicoordonatelor generale:
{ } [ ]{ }ac gTg = (3.125)
unde: [ ]cT este matricea de compatibilitate
{ }ag -vectorul coordonatelor generale aleansamblului.
Dacă se introduc condiţiile de compatibilitate în ecuaţiamatricială (3.124) şi se multiplică la stânga cu [ ] t
cT , se obţineecuaţia: [ ] [ ][ ] [ ] [ ][ ]( ){ } [ ] [ ] { }'FTgTbTTaTp tt
cact
cct
c Γ=+ (3.126)
Forma omogenă a acestei ecuaţii conduce la o problemăde valori proprii, cu matricea corespunzătoare a polilor [ ]d
aΛ şivectorii proprii { }rag .
Un caz particular des întâlnit este cazul sistemelorneamortizate (sau cu amortizare proporţională) pentru care sepot scrie pentru cele două substructuri ecuaţiile:
[ ] [ ]( ){ } { }11112 FXKMp =+ , (3.127)
respectiv: [ ] [ ]( ){ } { }2222
2 FXKMp =+ (3.128)
Cu transformarea de coordonate:
{ } [ ]{ }{ } [ ]{ }222
111
gXgX
ΓΓ
== (3.129)
şi dacă se multiplică la stânga cu [ ] [ ] tt respectiv 21 ΓΓ cuaţiile(3.127) şi (3.128) ele devin:

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
104
[ ] [ ][ ] [ ] [ ][ ]( ){ } [ ] [ ]( ){ } [ ] { }[ ] [ ][ ] [ ] [ ][ ]( ){ } [ ] [ ]( ){ } [ ] { } ,FgkmpgKMp
,FgkmpgKMpttt
ttt
222222
22222222
111112
11111112
ΓΓΓΓΓ
ΓΓΓΓΓ
=+=+
=+=+
şi se mai scriu sub forma unitară: (3.130)
[ ] [ ]( ){ } [ ] { }Fgkmp tΓ=+2 (3.131)
Folosind condiţiile de compatibilitate în coordonate generale:{ } [ ]{ }ac gTg = (3.132)
ecuaţia (3.131) se scrie:[ ] [ ][ ] [ ] [ ][ ]( ){ } [ ] [ ] { }FTgTkTTmTp tt
cact
cct
c Γ=+2 (3.133)
• Tehnici utilizând transformările modaleDeoarece matricile de transformare a coordonatelor fizice
în coordonate modale { }{ }21 ΓΓ , pot fi vectorii modurilorproprii, ai constrângerilor exterioare, ai modurilor de fixarereziduale sau ai modurilor proprii de vibraţii de corp rigid, sedeosebesc mai multe tipuri de transformări:1. transformări în termenii modurilor proprii normale
corespunzătoare gradelor de libertate ale legăturilor:{ } [ ]{ }ikifkif qX Ψ= (3.134)
unde i -reprezintă indicele substructurii;c - indicele gradelor de libertate ale legăturilor;f - indicele celelorlalte grade de libertate (libere);k - indicele coordonatelor modale reţinute.
2. transformări în termenii constrângerilor exterioare: modulde deformare este generat prin introducerea unei deplasăriunitare asupra unuia dintre gradele de libertate alelegăturilor, celelalte grade de libertate având deplasărizero. Ecuaţia care defineşte aceste moduri de deformare(statică) pentru componenta 1 în termenii celor două grupe

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
105
de grade de libertate (corespunzătoare legăturilor şi libere)este:
[ ] [ ][ ] [ ]
[ ][ ]
[ ][ ]
[ ][ ]
[ ] [ ][ ]
−=
⇒
=
−
dcc
fcffd
cc
f
cd
cc
f
cccf
fcff
IKK
IX
FIX
KKKK
11
11
1
1
11
11 0 (3.135)
ultima matrice putând fi o parte (coloane) a matricii [ ]1Γ .
1. transformări în termenii modurilor de fixare reziduale:modul de deformare este generat prin introducerea uneiforţe unitare asupra unuia dintre gradele de libertate alelegăturilor, în celelalte grade de libertate ele fiind zero.Dacă componenta nu este suficient de fixată, se recurge lafixarea suplimentară a gradelor de libertate notate cu (r).Ecuaţia care defineşte aceste moduri de deformare (statică)pentru componenta 1 în termenii celor două grupe de gradede libertate (ale legăturilor, libere) este:
[ ] [ ] [ ][ ] [ ] [ ][ ] [ ] [ ]
[ ][ ][ ]
[ ][ ][ ]
=
r
ccc
f
rrrcrf
crcccf
frfcff
FIX
X
KKKKKKKKK
1
1
1
111
111
111 0
0 (3.136)
rezultă:
[ ][ ]
[ ][ ]
[ ] [ ][ ] [ ]
[ ] [ ][ ] [ ]
1
11
11
11
11
1
1
1
1−
=
=
cccf
fcff
cccf
fcff
cc
fc
c
f
KKKK
SSSS
undeXX
XX (3.137)
ultima matrice putând fi o parte (coloane) a matricii [ ]Γ1 .
2. transformări în termenii modurilor proprii de vibraţii decorp rigid, dacă componentele nu sunt suficient de binefixate în punctele de conexiune, modurile de vibraţie decorp rigid se regăsesc ca moduri corspunzătoarefrecvenţelor de rezonanţă zero. Deducerea modurilor devibraţie corespunzătoare constrângerilor exterioare este oaltă cale de determinare a modurilor de vibraţie de corp

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
106
rigid. Fixând componentele în gradele de lidertatesuplimentare notate cu indicele (r) , în ecuaţia (3.136) seînlocuieşte (c) cu (r), obţinându-se:
[ ] [ ][ ] [ ]
[ ][ ]
[ ][ ]
[ ][ ]
[ ] [ ][ ]
−=
⇒
=
−
drr
frffd
rr
f
rd
rr
f
rrrf
frff
IKK
IX
FIX
KKKK
11
11
1
1
11
11 0 (3.138)
ultima matrice putând fi o parte (coloane) a matricii [ ]1Γ .
Allemang, Brown, Soni [3] denumesc acest set de vectorifuncţii de formă admisibile.
Este evident faptul că este posibil un mare număr decombinaţii pentru construirea matricilor[ ]Γi din transformarede coordonate modale: { } [ ]{ }iii gX Γ= .
În continuare sunt prezentate două metode specificefolosite curent în programele de element finit:
1. Metoda Craig-BamptonAceastă metodă [77] combină cele două transformări
modale: în termenii modurilor proprii normale şi în termeniiconstrângerilor exterioare. Transformarea de coordonatemodale : { } [ ]{ }iii gX Γ= devine în acest caz:
{ }{ }
[ ][ ]
[ ] [ ][ ]
{ }{ }
−=
−
ic
ikd
cc
ifciffifk
if
if
gg
IKK
XX 1
0Ψ (3.139)
Numărul de coordonatele modale reţinute k depinde deacurateţea dorită şi de banda de frecvenţe de interes.Presupunând că modurile se scalează pentru mase modaleunitare, ecuaţia matricială a sistemelor neamortizate
[ ] [ ]( ){ } [ ] { }Fgkmp tΓ=+2 , devine:
[ ][ ]
[ ][ ]
[ ][ ]
[ ][ ]
{ }{ } [ ] { }it
iic
ik
icc
ikc
ick
ikk
icc
ikc
ick
ikk Fqq
kk
kk
mm
mm
p Γ=
+
2 (3.140)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
107
unde matricile au forma particulară:
[ ] [ ][ ] [ ] [ ] [ ][ ] [ ] [ ]( )[ ] [ ][ ] [ ][ ] [ ] [ ]( ) [ ][ ] [ ] [ ]iccifcifficfifcifciffiffifficficc
ifcifciffifft
ifkt
ikcikc
dkkikk
MKKMMKKMKKm
MKKMmm
Im
+−−=
+−==
=
−−−
−
111
1Ψ
(3.141)
[ ] [ ] [ ] [ ] [ ] [ ] [ ][ ] [ ] [ ]iccifcifficficct
ikcikcd
ikikk KKKKk;kk;k +−===−= −12 0λ
(3.142)Pentru a putea aplica această metodă este necesar ca să
fie cunoscute cel puţin părţi ale matricilor maselor şirigidităţilor componentelor. Rezultă că analiza experimentalăa parametrilor modali oferă informaţii insuficiente.
2. Metoda Craig-Chang [77]Această metodă combină cele două transformări
modale: în termenii modurilor proprii normale şi în termeniimodurilor de fixare reziduale.
Transformarea de coordonate modale : { } [ ]{ }iii gX Γ=devine în acest caz:
{ }{ }
[ ][ ]
[ ][ ]
{ }{ }
=
ic
ik
icch
ifch
ifk
ifk
if
if
fq
SS
XX
ΨΨ
(3.143)
unde: - indicele h indică modurile reziduale.- deoarece matricea de flexibilitate statică respectărelaţia:
[ ] [ ] [ ] [ ] [ ] [ ][ ] [ ] [ ][ ] [ ]tih
dihih
tik
dikik
ti
diiii KS ΨλΨΨλΨΨλΨ 2221 −+−=−== −
- matricea reziduală este deci: (3.144)[ ] [ ] [ ] [ ]
[ ][ ] [ ] [ ][ ] [ ] [ ][ ]
=Ψ−Ψ−Ψ−Ψ=
=Ψ−Ψ=
icch
ifchtik
dikik
ti
dii
tih
dihihih
SS
S
22
2
λλ
λ (3.145)
Presupunând că se asambleză două componente (1) , (2)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
108
şi ţinând seama de condiţiile de compatibilitate { } { }cc XX 21 = şide continiutate { } { } { }021 =+ cc FF , ecuaţia matricială atransformării de coordonate, devine:
{ }{ }{ }{ }
[ ] [ ][ ] [ ]( ) [ ] [ ] [ ]( ) [ ]
[ ] [ ][ ] [ ]( ) [ ] [ ] [ ]( ) [ ]
{ }{ }
+−+
++−=
−−
−−
k
k
ickcchcchickcchcch
dickcchcchickcchcch
d
c
k
c
k
SSSSI
SSSSI
fqfq
1
1
211
2111
21
21
2111
21
1
1
1
1
20
0
ΨΨ
ΨΨ
(3.146)iar ecuaţiile matriciale ale sistemul global devin:
[ ][ ]
[ ][ ]
[ ][ ]
[ ][ ]
{ }{ } [ ] [ ] { }FTqq
KK
KK
MM
MM
p ttc
k
k
kmk
kmk
kmk
kmk
kmk
kmk
kmk
kmk Γ=
+
2
12
22
21
12
11
22
21
12
11
Pentru a putea aplica această metodă este necesar ca săfie cunoscute cel puţin unele părţi ale matricilor maselorsubansamblelor. Deşi metoda Craig-Chang nu este la fel deconvergentă ca metoda Craig-Bampton, ea prezintă avantajulcă exprimă rezultatele direct în coordonate modale.
3.6. Tehnici de ajustare, corelare şicorectare a modelului virtual (updating)Determinarea parametrilor modali ai unui sistem
mecanic se poate face prin metode experimentale saunumerice; astfel, metodele experimentale furnizează informaţiidespre o structură, pentru o anumită configuraţie particulară atestului (anumite condiţii de fixare şi de solicitare), în timp cemetodele cu element finit, permit previziuni asupracomportării dinamice pentru orice condiţii de fixare şi desolicitare, însă precizia datelor furnizate de acestea, nu esteprea ridicată.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
109
Rezolvarea acestei situaţii se poate face folosindtehnicile “updating” care permit verificarea, corelarea şicorectarea acestor modele pe baza datelor experimentaleobţinute pe modelul real. Rezultatele obţinute pe modelulvirtual corespunzător în acest fel, permit previziuni asupracomportării dinamice cu o siguranţă mai ridicată.
Ecauţia matricială a mişcării în spaţiul Laplace este:
[ ] [ ] [ ]( ) ( ){ } ( ){ } ;pFpXKCpMp =++2 (3.147)
sau: ( )[ ] ( ){ } ( ){ }pFpXpZ = (3.148)
Această ecuaţie se mai poate scrie sub forma matricialăextinsă echivalentă:
[ ] [ ]( ){ } { } ;'FYBAp =+ (3.149)
unde:
[ ] [ ] [ ][ ] [ ] [ ] [ ] [ ]
[ ] [ ]
{ } { }{ } { } { }
{ }
=
=
−=
=
F'F,
XXp
Y
,K
MB,
CMM
A
0
000
(3.150)
sunt matricile extinse.Ecuaţia matricială de valori proprii corespunzătoare
ecuaţiei (3.149) este:[ ] [ ]( ){ } { }0=+ YBAp (3.151)
şi se poate rezolva prin diferite metode (Householder,Subspace, Lanczos, etc.) şi permite determinarea următorilorparametri modali:
• valorile proprii: rrr jωσλ += ,
• vectorii proprii coresponzători: { } rψ ,

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
110
• masele rm şi rigidităţile modale rk , r=1, . . . Nm.
Pentru a se evita confuzia dintre parametrii modaliobţinuţi experimental şi cei obţinuţi analitic, se adaugă indicii:
• (x) pentru parametrii obţinuţi experimental :
{ } xr
xr
xrr
xr
xr
x k,m,,j ψωσλ += ;
• (a) pentru parametrii obţinuţi analitic :
{ } ar
ar
arr
ar
ar
a k,m,,j ψωσλ += ;
Tehnica updating conţine următoarele patru faze:a. Ajustarea modelului constă în identificarea punctelor de
măsurare cu nodurile modelului cu element finit. În plusmodelul cu element finit este compus din mult mai multenoduri (corora le corespund gradele de libertate alesistemului) decât punctele de măsurare ale experimentului.Pentru a rezolva această incompatibilitate se folosescdiferite tehnici de corelare sau corecţie : fie prin reducereanumărului de grade de libertate al modelului virtual lanumărul de grade de libertate al măsurătorii, fie prinextinderea (expandare, interpolare) numărului de grade delibertate al măsurătorii la numărul de grade de libertate almodelului virtual.
b. Corelarea parametrilor modali este un proces iterativ decomparare şi corelare a celor două seturi de date (analiticeşi experimentale)
c. Selectarea parametrilor modali cei mai diferiţi din celedouă seturi de rezultate;
d. Corectarea parametrilor modali obţinuţi analitic pe bazacelor obţinuţi experimental.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
111
De cele mai multe ori însă această tehnică nu poateconduce la o compatibilitate perfectă între cele două seturi deparametri, datorită în general următoarelor cauze:
• punctele de măsurare nu coincid cu nodurile modeluluicu element finit;
• setul de date experimentale este incomplet;• măsurătorile sunt supuse unor influenţe exterioare
(zgomote, masele traductoarelor, etc.) care pot generaerori;
• amortizarea din sistem se neglijează în cele mai multecazuri .După updating, modelul virtual corectat va furniza
parametri modali care vor fi corelaţi cu parametrii modaliexperimentali într-un mod optim, măsura acestei corelăriexprimându-se prin gradul de compatibilitate pentru fiecareparametru în parte (evident ele vor avea valori diferite).
Schema generală (algoritmul) tehnicii updating esteprezentată în fig.3.2
A. Ajustarea modeluluiCele mai multe metode de analiză cu element finit
impun o corespondenţă 100% între gradele de libertate alemodelului virtual şi cele ale modelului experimental – acestease mai numesc şi grade de libertate active, iar celelalte se mainumesc grade de libertate inactive ale structurii.
Practic acest lucru nu se poate realiza 100% datorităincompatibilităţilor legate de reţeaua de elemente finite pecare o generează programul (meshare) , iar prin ajustarea dincadrul tehnicilor updating se realizează un compromis. Sedeosebesc următoarele două faze în ajustarea modelului:

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
112
STRUCTURA REAL|
ANALIZA
EXPERIMENTAL|
A MODELULUI REAL
ANALIZA MODELULUI
CU ELEMENT FINIT
FEA
I. AJUSTAREA
MODELULUI
MODELUL ESTE
DEMN DE
INCREDERE
REABUN|
Fig. 3.2
II. CORELAREA
PARAMETRILOR
III.
SELECTAREA
IV. CORECTAREA
PARAMETRILOR
[ ] [ ] [ ]
{ }
M K C
j
m k
ar
ar
ar
r
a
ra
ra
, ,,
, ,
λ σ ω
ψ
= + { }λ σ ω
ψ
xr
xr
xr
r
x
rx
rx
j
m k
= + ,
, ,

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
113
• prima fază: de reducere a modelului virtual, sau separareagradelor de libertate în două grupe: grade de libertateactive { }AX , respectiv grade de libertate inactive { }DX , din
numărul total al gradelor de libertate: { } { }{ }
=D
AF X
XX .
Din cauza acestei separări sistemele de matricicorespunzătoare celor două seturi vor diferi cadimensiuni.
• a doua fază: reducerea modelului virtual sau extindereamodelului experimental.
A.1. Tehnici de reducere a modelului virtualPrin reducerea modelului virtual sau extinderea
modelului experimental, conform ş34ţ se exprimă sistemulmatricilor de rigiditate dinamică în termenii gradelor delibertate ce corespund gradelor de libertate active .
Dacă se introduc [ ]DT şi [ ]FT , matricile corespunzătoareale transformărilor de coordonate inactive:{ } [ ]{ }ADD XTX = şirespectiv toate coordonatele: { } [ ]{ }AFF XTX = , funcţie degradele de libertate active, atunci matricile reduse ale maselorşi rigidităţilor se scriu astfel:
{ } [ ]{ } { } [ ]{ }{ } [ ]{ } { } [ ]{ }A
RtAF
tF
ARt
AFt
F
XKXXKX
XMXXMX
=
= (3.152)
Înlocuind { } [ ]{ }AFF XTX = se obţine respectiv:
{ } [ ] [ ][ ] { } { } [ ]{ } [ ] [ ] [ ][ ]{ } [ ] [ ][ ] { } { } [ ]{ } [ ] [ ] [ ][ ]Ft
FR
ARt
AAFt
Ft
A
Ft
FR
ARt
AAFt
Ft
A
TKTKXKXXTKTX
TMTMXMXXTMTX
=⇒=
=⇒=
(3.153)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
114
Ecuaţia mişcării sistemului în spaţiul Laplace se scrie:( )[ ]{ } { } ( )[ ] [ ] [ ]MKZ:unde,FXZ FF
2ωωω −== (3.154)
Pentru sistemul redus, forţele corespunzătoare gradelorde libertate inactive sunt nule, astfel încât dacă se exprimămatricea [ ]Z sub forma modulară corespunzătoare celor douăseturi de grade de libertate, ecauţia de mişcare a sistemuluidevine:
[ ] [ ][ ] [ ]
{ }{ }
{ }{ }
=
0
A
D
A
DDDA
ADAA FXX
ZZZZ (3.155)
Din lina a doua a ecuaţiei matriciale de mai sus rezultă:
{ } [ ] [ ]{ }ADADDD XZZX 1−−= (3.156)
Din prima linie a ecuaţiei matriciale de mai sus rezultă:[ ] [ ][ ] [ ]( ){ } { }
[ ]{ } { }AA
AADADDADAA
FXZsau
FXZZZZ
=
=− −
~,1
(3.157)
unde : [ ] [ ] [ ]( ) [ ] [ ]( )
[ ] [ ]( ) [ ] [ ]( )DADADDDD
ADADAAAA
MKMK
MKMKZ212
22~
ωω
ωω
−−⋅
⋅−−−=− (3.158)
este matricea de rigiditate dinamică a sistemului caredescrie “exact “ comportarea dinamică a sistemului redus.
Este evident faptul că matricea de rigiditate dinamicăredusă ( )[ ] [ ] [ ]RRR MKZ 2ωω −= nu poate fi identică cu matricea[ ]Z~ pentru toate frecvenţele, ea prezentând doar o descriereaproximativă a comportării dinamice a sistemului.
Reducerea modelului virtual elimină practic gradele delibertate inactive din modurile proprii analitice şi din sistemulmatricial. Această operaţie este simplă şi rapidă, dacă sefolosesc unele tehnici de reducere (dinamică sau GUIAN,SEREP, IRS) care sunt prezentate mai jos.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
115
A.1.1.Reducerea dinamică sau GUIAN [24]Pentru o anumită frecvenţă aleasă ωR se defineşte
matricea de transformare [ ]dinDT plecând de la ecuaţia :
{ } ( )[ ] ( )[ ]{ }ARDARDDD XZZX ωω 1−−= (3.159)
astfel: [ ] ( )[ ] ( )[ ]RDARDDdin
D ZZT ωω 1−−= (3.160)
În consecinţă matricile reduse [ ]RM şi [ ]RK nu dau odescriere exactă decât numai pentru frecvenţa aleasă ωR,pentru celelalte frecvenţe ele descriu o matriceaproximativă [ ]RZ .
Un caz particular al reducerii dinamice este reducereaGUIAN. Reducerea statică este corespondentul reduceriiGUIAN în care se consideră ωR=0 .
A.1.2. Reducerea prin sistemul echivalent şiexpansiunea procesului SEREP [53].Această metodă impune ca transformarea de
coordonate:{ } [ ]{ }AFF XTX = (3.161)
să fie valabilă pentru toate modurile proprii conoscute:[ ] [ ][ ]A
serepFF T ΨΨ = (3.162)
Întrucât numărul de moduri proprii Nm este întotdeaunamai mic decât numărul de grade de libertate active NA ecuaţiamatricială de mai sus reprezintă o problemă nedeterminată. Ease rezolvă folosind matricea pseudo-inversă a matricii [ ] :AΨ
[ ] [ ] [ ]( ) [ ]tAA
tAA ΨΨΨΨ
1−+ = (3.163)
care prin identificare conduce la următoarea expresie amatricii de transformare:

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
116
[ ] [ ][ ] += AFserep
FT ΨΨ (3.164)
Sistemul redus va avea aceleaşi moduri proprii ca şisistemul complet care a fost utilizat la reducerea procesuluicaracterizat de ecuaţia:
[ ] [ ]( ){ } { }02 =− rFr MK Ψω . (3.165)
Prin multiplicare la stânga cu [ ]tserepFT şi înlocuind (3.162)
se obţin ecuaţiile:
[ ] [ ] [ ]( )[ ]{ } { }02 =− rAserep
Frtserep
F TMKT Ψω (3.166)
[ ] [ ]( ){ } { }02 =− rAserep
rserep MK Ψω (3.167)
Cu cât numărul de moduri proprii folosite este mai micdecât numărul de grade de libertate, matricea sistemului redusare rangul mai mic.
A1.1.3. Reducerea cu ajutorul sistemului ameliorat -IRSAceastă metodă se bazează pe ecuaţiile de mişcare
matriciale scrise pentru frecvenţele de rezonanţă în termeniicelor două seturi de grade de libertate [54]:
[ ] [ ][ ] [ ]
[ ][ ]
[ ] [ ][ ] [ ]
[ ][ ] [ ]diag
rD
A
DDDA
ADAA
D
A
DDDA
ADAA
MMMM
KKKK
ωΨΨ
ΨΨ
=
(3.168)
Din cea dea doua linie a ecuaţiei matriciale se poateexprima matricea funcţiilor proprii corespunzătoare gradelorde libertate inactive:
[ ] [ ] [ ][ ] [ ] [ ][ ][ ][ ][ ]diagrFDDDADDADADDD MMKKK 211 ωΨΨΨ −− +−= (3.169)
Pentru o primă estimare a matricii [ ]FΨ se face reducereastatică a sistemului (ωR=0), rezultând:
[ ] [ ] [ ][ ]ADADDD KK ΨΨ 1−−= (3.170)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
117
Dacă se ţine seama de relaţia transformării modurilorproprii: [ ] [ ][ ]A
statFF T ΨΨ = (3.171)
rezultă o primă estimare a matricii de transformare amodurilor proprii:
[ ] [ ][ ] [ ]
−
= −DADD
statF KK
IT 1 (3.172)
Înlocuind ecuaţia (3.172) în (3.169) se obţine:
[ ] [ ] [ ][ ] [ ] [ ][ ][ ][ ][ ][ ]diagrA
statFDDDADDADADDD TMMKKK 211 ωΨΨΨ −− +−= (3.173)
Dacă se folosesc maticile maselor şi rigidităţilor reduse:
[ ] [ ] [ ][ ][ ] [ ] [ ][ ]stat
Ftstat
Fstat
statF
tstatF
stat
TKTK
TMTM
=
= (3.174)
şi relaţia matricială evidentă:
[ ][ ] [ ][ ][ ][ ][ ] [ ] [ ] [ ]A
statstatdiagrA
diagrA
statA
stat
KM
sauMK
ΨωΨ
ωΨΨ12
2
−≅
≅ (3.175)
relaţia (3.173) devine:
[ ] [ ] [ ] [ ] [ ][ ][ ][ ][ ] [ ]( )[ ]Astatstatstat
FDDDADDDADDD KMTMMKKK ΨΨ 111 −−− +−=
(3.176)sau: [ ] [ ][ ]A
IIDD T ΨΨ = (3.177)
unde: [ ] [ ] [ ] [ ] [ ][ ][ ][ ][ ] [ ]( )statstatstatFDDDADDDADD
IID KMTMMKKKT 111 −−− +−=
(3.178)este a doua estimare (ameliorată sau îmbunătăţită) a matriciide transformare a modurilor proprii:
[ ] [ ][ ] [ ] [ ] [ ][ ] [ ] [ ] [ ][ ]II
FtII
FIIII
FtII
FII
IID
IIF TKTK,TMTM,
TI
T ==
= (3.179)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
118
Acesta este deci un proces iterativ convergent, caredupă câteva iteraţii va conduce la:
[ ] [ ] [ ] [ ] [ ][ ][ ][ ][ ] [ ]( )111111 −−−−−− +−= irsirsirsFDDDADDDADD
irsD KMTMMKKKT
(3.180)
[ ] [ ][ ] [ ] [ ] [ ][ ] [ ] [ ] [ ][ ]irs
Ftirs
Firsirs
Ftirs
Firs
irsD
irsF TKTK,TMTM,
TI
T ==
= (3.181)
A.2. Tehnici de extindere a modeluluiExtinderea modelului asigură (pe baza măsurătorilor pe
modelul experimental) expansiunea rezultatelor asupra tuturorgradelor de libertate ale modelului cu element finit. Însă celemai multe tehnici de extindere fac operaţia inversă: utilizânddatele analizei pe modelul cu element finit, extind rezultateleasupra modelului experimental printr-o ajustarecorespunzătoare a modelului cu element finit.
Tehnicile de reducere prezentate anterior pot fi utilizateşi ca tehnici de extindere întrucât ele definesc o relaţiebiunivocă între cele două seturi de grade de libertate (active şiinactive) în temenii vectorilor deplasărilor şi modurilor proprii(indicele x semnifică valori experimentale):
{ } [ ]{ }ADD XTX = , (3.182)
respectiv: { } [ ]{ } xrAD
xrD T ΨΨ = (3.183)
Pe lângă cele prezentate mai sus (dinamică sau GUIAN,SEREP, IRS) se mai folosesc următoarele tehnici deexpansiune:

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
119
A.2.1. Tehnici de combinare a vectorilor propriiAceastă metodă completează gradele de libertate care
lipsesc din vectorii proprii obţinuţi din analiza experimentalăcu valorile corespunzătoare ale vectorii proprii obţinuţIanalitic (din analiza cu element finit):
{ } { }{ }
= arD
xrAx
rF ΨΨΨ (3.184)
această completare se va face după o scalare prealabilăa celor două seturi de vectori proprii astfel încât normele lor săfie egale: { } { } a
rAxrA ΨΨ = (3.184)
A.2.2. Tehnici de coordonare modalăAceastă metodă defineşte modurile proprii
experimentale ca o combinaţie liniară a modurilor propriiobţinute analitic (din analiza cu element finit), în carecoeficienţii se alculează cu ajutorul gradelor de libertateactiveş48ţ:
[ ] [ ] [ ] [ ] [ ]( ) [ ]xA
aA
aA
xA q,q ΨΨΨΨ 1−== (3.185)
Aceeaşi matrice [ ]q este folosită pentru estimareamodurilor proprii corespunzătoare gradelor de libertate carelipsesc:
[ ] [ ] [ ] [ ] [ ]( ) [ ]xA
aA
aD
aD
xD q ΨΨΨΨΨ 1−== (3.186)
A.2.3. Tehnici de interpolareTehnicile de interpolare pot fi utilizate pentru estimarea
gradelor de libertate care nu au fost luate în calcul. Acestemetode depind în principal de modul de conexiune adiferitelor grade de libertate. În practică utilizarea acestormetode este limitată, în special în cazul structurilor careunidimensionale.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
120
A.2.4. Criteriul de asigurare modal (MAC)Această metodă utilizează valorile criteriului MAC
obţinute în cadrul tehnicilor de corelare, în scopul extinderiimodurilor proprii asupra gradelor de libertate ce lipsesc [78].Ca şi în cazul metodei de combinare a vectorilor propriiaceastă completare se va face după o scalare prealabilă a celordouă seturi de vectori proprii, astfel încât normele lor să fieegale: { } { } a
rAxrA ΨΨ = (3.187)
Modurile proprii experimentale se pot extinde cuajutorul matricilor [MAC ] astfel:
[ ] [ ] [ ] [ ] [ ] [ ]MACsauMAC aD
xD
aF
xF ΨΨΨΨ == (3.188)
B. Tehnici de corelare a parametrilor modali Scopul updating-ului modelului virtual este de a pune înconcordanţă datele obţinute pentru acesta, cu datele obţinutepentru modelul real; pentru a evalua nivelul de concordanţă seutilizează câteva criterii de corelare şi tehnici specifice.Rezultatul acestei corelări permite luarea unei decizii (dacăcorecţia modelului este necesară sau nu). Întrucât fiecare tehnică este limitată, întrucât pune înevidenţă un anumit aspect al corelării între datele modeluluiexperimental şi virtual, un studiu complet al corelării nu sepoate face utilizând una sau două tehnici de corelare. Încontinuare sunt prezentate cele mai importante tehnici decorelare utilizate în updating-ul modelelor cu element finit.
B.1. Tehnica diferenţei frecvenţelor de rezonanţă Este cea mai simplă metodă de comparaţie afrecvenţelor de rezonanţă ale modelului virtual cu celedeterminate experimental pe modelul real. Diferenţa maximăadmisă depinde în primul rând de acurateţea determinărilorexperimentale.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
121
B.2. Tehnica comparării vizuale a modurilor proprii Este o metodă simplă de comparaţie vizuală a modurilorproprii: pe baza acestei comparaţii se formează perechilecorespunzătoare de moduri proprii. O comparaţie maisugestivă de celor două seturi de moduri proprii este prinmăsurarea abaterilor tuturor punctelor faţă de o linie la 45o
într-un sistem de axe de coordonate rectangulare carereprezintă coordonatele modale normale (scalate)corespunzătoare celor două seturi de date:
analitice / experimentale: ( )xr
ar ΨΨ /
B.3. Tehnica criteriului de asigurare modală (MAC) Această tehnică exprimă printr-un singur numărcorelaţia din tehnica comparării vizuale a modurilor proprii,prin coeficienţii MAC corespunzători fiecărei perechi demoduri determinate analitic şi experimental [4]:
( ){ } { }
{ } { }( ){ } { }( )am
amx
jxtj
ai
ati
xj
atixa N...,j;N...,i,j,iMAC 11 ===−
ψψψψ
ψψ (3.189)
Matricea criteriului de asigurare modală (MAC) este omatrice diagonală, iar dacă coeficienţii sunt mai mari de 0,8spunem că există o bună corelaţie între cele două modele.
B.4. Tehnica criteriului de asigurare modală global Această tehnică (COMAC) exprimă conform [46]corelaţia dintre modurile proprii, determinate analitic şiexperimental pentru fiecare grad de libertate j prin coeficienţiide corelare globală definiţi astfel:
( )( ) ( )
( ) ( ) ( ) ( )am
N,..i
xi
xi
N,..i
ai
ai
N,..i
xi
ai
xa N...,j,jjjj
jjjCOMAC
mm
m 1
11
2
1 =
⋅
⋅
⋅
=
∑∑
∑
==
=−
ψψψψ
ψψ (3.190)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
122
B.5. Tehnica comparării vizuale a funcţiilor derăspuns în frecvenţă
Este de asemenea o metodă simplă de comparaţievizuală a funcţiilor de răspuns în frecvenţă, pentru cele douămodele în condiţiile unei amortizări scăzute, acestea fiindtrasate pentru acelaşi domeniu al frecvenţelor şi aceeaşi scalăpentru ambele modele. B.6. Tehnica ortogonalităţii combinate şi eterogene Este o tehnică care se bazează pe proprietatea deortogonalitate a modurilor proprii de vibraţie [48]. Aceastăproprietate furnizează matricile (diagonale) ale maselor şirigidităţilor modale:
[ ] [ ][ ] [ ][ ] [ ][ ] [ ] diag
raat
diagr
aat
kK
mM
=
=
ψψ
ψψ (3.191)
Matricea ortogonalităţii combinate a maselor şirigidităţilor modale se obţine astfel:
[ ] [ ][ ][ ] [ ][ ] xatxa
xatxa
KCOK
MCOM
ψψ
ψψ
=
=−
−
(3.192)
Matricea ortogonalităţii eterogene a maselor şirigidităţilor modale se obţine astfel:
[ ] [ ][ ][ ] [ ][ ] xxtxa
xxtxa
KMOK
MMOM
ψψ
ψψ
=
=−
−
(3.193)
În cazul unor modele bine corelate aceste matrici auelementele de pe diagonală foarte apropiate de 1 (dacă s-afăcut scalarea corespunzătoare a matricilor), iar celelalteaproape nule.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
123
B.7. Tehnica masei globale Este o tehnică care se bazează pe evaluarea maseiglobale a modelului cu element finit din matriceacorespunzătoare a maselor şi comparaţia cu distribuţia reală amaselor. Rezultatele tehnicilor b1, b2, b5 şi b7 nu suntinfluenţate de eventuale incompatibilităţi dintre cele douăreţele ale punctelor de măsurare (nodurile elementelor finite şipunctele de măsurare), iar pentru tehnicile b3, b4 şi b6rezultatele pot diferi mult dacă există asemaneaincompatibilităţi.
C. Selectarea parametrilor modali Alegerea parametrilor modali depinde de tehnica decorecţie utilizată în faza următoare; aceste tehnici sunt de douăfeluri:
• tehnici de corecţie directe care calculează matricilemodelului corectat dintr-un singur pas;
• tehnici de corecţie de sensibilitate sau iterative carecalculează matricile modelului corectat din aproape înaproape.
O clasificare a parametrilor în vederea selectării lorpentru corecţie se poate face astfel:• parametrii corespunzători elementelor individuale din
matricea sistemului global• parametri care descriu modificări proporţionale ale
subsistemelor în matricea sistemului global; submatricilepot fi matrici care descriu o parte limitată a sistemului;

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
124
• parametri care descriu proprietăţi fizice pentru modelul cuelement finit (proprietăţi de material, volume, etc.)
Alegerea parametrilor ce urmează a fi corectaţi estefoarte dificilă, întrucât nu putem cunoaşte care dintre aceştiareprezintă cauza necorelărilor dintre cele două modele.
Astfel dezavantajele pentru cele două cazuri extreme sunt:• dacă se selectează un număr insuficient de parametri, există
dezavantajul de a nu obţine prin corecţii un nivel dorit alcorelaţiei.
• dacă se selectează un număr prea mare de parametri, estenecesară o tehnică de calcul avansată, iar acest fapt nugarantează că rezultatul final va putea satisface toatecerinţele impuse corelării acestor parametri.
Literatura tehnică de specialitate [36], [37] propunecâteva tehnici de alegere a parametrilor, numite şi metode delocalizare a erorii, care pot furniza informaţii foarte utileprivind această alegere. Aceste metode nu au pretenţia de a dacea mai bună selecţie; mai mult, intuiţia şi experienţainginerului pot să prevaleze în alegerea parametrilor.
C.1. Tehnica criteriului de asigurare modală global Întrucât această tehnică (COMAC) exprimă corelaţiadintre modurile proprii, determinate analitic şi experimentalpentru fiecare grad de libertate j prin coeficienţii de corelareglobală, gradele de libertate cu valori scăzute alecoeficientului COMAC se pot considera ca fiindrăspunzătoare de neconcordanţa dintre parametrii modelelor.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
125
C.2. Metoda matricii erorilor [66] Această metodă permite calculul aproximativ aldiferenţelor dintre matricile corespunzătoare modelului virtualşi matricile (necunoscute) corespunzătoare modelului real. În termenii matricii de rigiditate această diferenţă sescrie: [ ] [ ] [ ] [ ] [ ] [ ]KKKKKK axax ∆∆ +=⇒−= (3.194)
Dacă se inversează această matrice şi se multiplicăsuccesiv la dreapta şi apoi la stânga cu matricea [ ]K a−1 seobţine:
[ ] [ ] [ ] [ ] [ ][ ] [ ] [ ][ ][ ] [ ] [ ] [ ][ ]( )[ ] [ ] [ ] [ ] [ ] [ ][ ]( ) [ ] [ ] [ ][ ]( )[ ] [ ] [ ] [ ][ ]( ) [ ] [ ] [ ] [ ][ ] 11111
1111111
111
1111
−−−−−
−−−−−−−
−−−
−−−−
−=⇒−≅
−≅+=
+=
+=+=
axaaax
aaaaxaa
axa
aaaaax
KKIKKKKIKK
KKIKKKIKKKK
KKIKK
KKIKKKKKK
∆∆
∆∆
∆
∆∆
(3.195) Ţinând seama de condiţiile de ortogonalitate, carepentru matricea [ ]K x−1 se poate scrie:
[ ] [ ] [ ] [ ]xtxr
xx kK ψψ 11 −− = (3.196)
atunci din ultima ecuaţie matricială înmulţind la dreapta cu[ ]K a această diferenţă se scrie:
[ ] [ ] [ ] [ ] [ ] [ ]( )[ ]axtxr
xaa KkKKK ψψ∆ 11 −− −= (3.197)
Această metodă poate fi privită şi ca o metodă decorecţie directă. C.3 Metoda echilibrului forţelor [21] Această metodă calculează vectorul forţelor reziduale:
{ } [ ] [ ]( ){ } xr
axr
ar MKF ψω ⋅−= 2 (3.198)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
126
Gradele de libertate care nu sunt în echilibru { } { }0=rFarată o neconcordanţă a modelului cu element finit utilizat.
C.4. Metode bazate pe sensibilitatea parametrilorAceste metode permit depistarea celor mai sensibili
parametri. Setul celor mai sensibili parametri este probabil celcare asigură convergenţa cea mai rapidă a modelului supusupdatingului [35].
Practica inginerească a scos în evidenţă de asemenea căsetul celor mai sensibili parametri este în cele ami multecazuri diferit de parametrii care introduc neconcordanţe întrecele două modele.
D. Corectarea parametrilor modaliEste ultimul pas în tehnica updating în care se
recalculează noile valori ale parametrilor, care introduse înmodelul virtual cu element finit, conduc la noi parametrimodali care se corelează foarte bine cu datele experimentale.Se cunosc multe metode pentru corectarea acestor parametri,ele evoluând de la cele directe la metodele iterative sau desensibilitate.
Metodele de sensibilitate permit optimizareaparametrilor selectaţi după un procedeu iterativ de exprimare aparametrilor modali sub forma unei dezvoltări Taylortrunchiate, funcţie de parametrii selectaţi pentru corecţie.
În prezentarea metodelor de corecţie (pentru simpitate)se fac următoarele ipoteze:
• nu există incompatibilităţi legate de reţeaua de noduri(meshare);

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
127
• vectorii şi matricile corespunzătoare celor două modele auaceleaşi dimensiuni.
D.1. Metode directe de corecţieAceste metode permit optimizarea sistemului de matrici
într-un singur pas şi se bazează pe una sau mai multe dintreecuaţiile matriciale următoare (indicele u - “updating”):
• ecuaţia mişcării la rezonanţă:
[ ] [ ]( ){ } { }02 =− xr
uxr
u MK ψω (3.199)
• condiţiile de ortogalitate:
{ } [ ] { } [ ] { } [ ] { } [ ]diagxr
xr
uxtr
diagxr
xr
uxtr kK;mM == ψψψψ (3.200)
• condiţiile de simetrie:
[ ] [ ] [ ] [ ] [ ] [ ]00 =−=− utuutu KK;MM (3.201)
Aceste metode sunt afectate de caracterul incomplet aldatelor experimentale, mai ales atunci când se folosesccondiţiile de ortogalitate. Variante ale acestor metode suntprezentate în lucrările [10] ,[26].
D.1.1. Metoda multiplicatorilor lui LAGRANGEEste o metodă ce permite minimizarea distanţelor
ponderate dintre cele două matrici, matricea obţinută dupăupdating şi matricea originală [5], [6] ,[11], conform relaţiilor:
[ ] [ ] [ ]( )[ ][ ] [ ] [ ]( )[ ] 5050
5050
.u.K
.u.M
KKKK
MMMM−−
−−
−=
−=
ε
ε (3.202)
Metoda Berman pentru calculul matricii corectate amaselor, minimizează funcţia lui Lagrange, folosind condiţiade ortogonalitate:

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
128
{ } [ ] { } [ ]diagxr
xr
uxtr mM =ψψ (3.203)
definită astfel:
[ ] [ ] [ ] [ ]( )ij
diagxuxtN
i
N
jijMM IML
xm
xm
−+= ∑∑= =
ΨΨλε1 1
(3.204)
unde: [ ]xΨ este matricea vectorilor proprii
λij multiplicatorii Lagrange pentru elementul (i,j)Minimizarea funcţiei LM conduce la matricea:
[ ] [ ] [ ] [ ][ ] [ ] [ ][ ] [ ] [ ][ ]( )
[ ] [ ] [ ][ ]( )[ ] [ ][ ]( ) [ ] [ ]MMMI
MMMM
MMMM
xtxxtxxt
xxtxu
tu
ΨΨΨΨΨ−⋅
⋅ΨΨΨ+=
∆+∆+=
−
−
1
1 (3.205)
Metoda Berman pentru calculul matricii corectate arigidităţilor minimizează funcţia lui Lagrange folosindcondiţia de ortogonalitate:
{ } [ ] { } [ ]diagxr
xr
uxtr kK =ψψ (3.206)
definită astfel:
[ ][ ] [ ][ ] [ ]( )[ ] [ ][ ] [ ]( ) [ ] [ ]( )∑∑∑∑
∑∑
= == =
= =
−+−+
+−+=
am
am
xm
xm
am
xm
N
i
N
jij
tij
sij
diagxr
xxtN
i
N
jij
ij
diagxr
xxN
i
N
jij
kKK
KKK
MKL
1 1
2
1 1
0
2
1 1
λωΨΨλ
ωΨΨλε (3.207)
Minimizarea funcţiei LK conduce la matricea:
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ] [ ][ ] [ ]( )[ ] [ ]
[ ][ ] [ ] [ ] uxtx
uxtdiagxr
xxtxu
tu
MK
MKMK
KKKK
ΨΨ−
−Ψ+ΨΨΨ=∆
∆+∆+=25.0 ω (3.208)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
129
D.1.2. Metode bazate pe condiţiile de ortogonalitateAceste metode utilizează inversele ecuaţiilor matriciale
ale condiţiilor de ortogonalitate pentru a calcula inverselematricilor corespunzătoare modelului experimental [47]:
[ ] { } [ ] { }[ ] { } [ ] { } xt
rdiagx
rxr
x
xtr
diagxr
xr
x
kK
mM
ψψ
ψψ11
11
−−
−−
=
= (3.209)
D.1.3. Metoda matricii erorilor Această metodă prezentată ca metodă de selectare a
parametrilor, permite calculul aproximativ al diferenţelordintre matricile corespunzătoare modelului virtual şi matricile(necunoscute) corespunzătoare modelului real.
În termenii matricii de rigiditate această diferenţă sescrie:
[ ] [ ] [ ] [ ] [ ] [ ]( )[ ]axtxr
xaa KkKKK ψψ∆ 11 −− −= (3.210)
D.1.4. Metoda ortogonalităţii combinate A fost prezentată ca tehnică de corelare şi se bazează peproprietatea de ortogonalitate a modurilor proprii de vibraţie
[ ] [ ][ ] [ ] diagr
aat kK =ψψ ; (3.211)
din ecuaţia matricială :
[ ] [ ] [ ] [ ] [ ] [ ] )KK(KKKK axu −+=+= ∆ (3.212)
rezultă prin inversarea matricilor:
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ]( )ata
raxtx
rxu
axu
kkKK
)KK(KK
ψψψψ 1111
1111
−−−−
−−−−
−+=
⇒−+= (3.213)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
130
unde [ ]aψ reprezintă matricea vectorilor propriicorespunzătoare modelului experimental.
D.1.5. Metoda perturbaţiei matricialeEste o metodă de corecţie directă [13] care se bazează
pe următoarele relaţii matriciale:
[ ] [ ] [ ][ ] [ ] [ ][ ] [ ] [ ] [ ] [ ] [ ][ ] [ ] [ ]222
ra
rx
r
aaax
ax
ax
KKK
MMM
ω∆ωω
ρΨΨ∆ΨΨΨ
∆
∆
+=
+=+=
+=
+=
(3.214)
unde [ ]ρ este o matrice cu elementele de pe diagonală nule.
Înlucuind aceste relaţii în condiţiile de ortogonalitate:
{ } [ ] { } [ ]{ } [ ] { } [ ]diagx
rxr
uxtr
diagxr
xr
uxtr
kK
mM
=
=
ψψ
ψψ (3.215)
se obţine:
[ ] [ ][ ] [ ] [ ] [ ][ ] [ ] [ ][ ]( )[ ] [ ]MMMIMM ataxtxata ΨΨΨΨΨΨ∆ −−= 2 , (3.216)
respectiv: (3.217)
[ ] [ ][ ] [ ] [ ] [ ] [ ][ ] [ ] [ ][ ]( )[ ] [ ]MKKMK ataxtxatdiagxr
diagar
a ΨΨΨΨΨωωΨ∆ −−+= 22
D.2. Metode iterative de corecţie bazate pesensibilitatea parametrilorAceste metode minimizează norma unor vectori
reziduali { }ε care exprimă diferenţa între diferite tipuri deparametri obţinuţi experimental şi analitic, cum sunt:frecvenţele de rezonanţă; coeficienţii modurilor proprii de

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
131
vibraţie; elementele nediagonale ale matricilor ortogonalităţiicombinate; elementele matricilor forţelor reziduale pentrufrecvenţele proprii; elementele matricilor funcţiei de răspunsîn frecvenţă; elementele matricilor maselor.
Reziduurile ε sunt exprimate ca o funcţie matricială devectorii parametrilor { }u cu ajutorul dezvoltării Taylor deordinul unu:
{ }( ) { }( ) ∑=
+=
uN
ii
i
uu
uu1
0 ∆∂∂εεε (3.218)
unde: Nu este numărul parametrilor selectaţi pentru updating{ }( )
iuu
∂∂ε - derivatele parţiale de ordinul unu , numite şi
sensibilităţile parametrilor { }u .
D.2.1. Metoda reziduală a frecvenţelor de rezonanţă relative
{ } [ ] [ ] { } a
ri
ar
i
atra
rxrri
ar
xri
xr
xr
ar
uM
uK
muur
r
ψ∂
∂ω∂
∂ψωω∂
∂ωω∂
∂εω
ωωε
ω
ω
−==
−=
2
211
(3.219)
Aceste reziduuri nu sunt influenţate deincompatibilităţile dintre cele două modele. Această metodăeste o metodă globală care nu poate da o informaţie spaţială acorecţiei.
D.2.2. Metoda reziduală a vectorilor modurilor proprii
{ } { } { } { } { } ,qu
; rs
N
s
as
i
arx
rar
am
r ∑=
≅−=1
ψ∂ψ∂ψψεψ (3.220)
unde:

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
132
{ } [ ] [ ] { }
( ){ } [ ]{ } a
ri
atr
r
rr
ar
ass
ar
i
ar
i
ats
rs
uM
mq
;m
uM
uK
q
ψ∂
∂ψ
ωω
ψ∂
∂ω∂
∂ψ
21
22
2
−=
−
−
= (3.221)
D.2.3. Metoda reziduală a elementelor nediagonale alematricii ortogonalităţii combinate Matricea ortogonalităţii eterogene a maselor şirigidităţilor modale:
[ ] [ ][ ][ ] [ ][ ] xxtxa
xxtxa
KMOK
MMOM
ψψ
ψψ
=
=−
−
(3.222)
conţine următoarele elemente nediagonale:
{ } [ ]{ }{ } [ ]{ } vspentru,M
vspentru,Mxv
xts
vsMOK
xv
xts
vsMOM
≠=
≠=−
−
ψψε
ψψε (3.223)
Sensibilităţile acestor parametri în raport cu variaţiaparametrilor ui sunt:
{ } [ ] { } { } [ ] { } xv
i
xts
i
vsMOKx
vi
xts
i
vsMOM
uK
u;
uM
uψ
∂∂ψ
∂∂εψ
∂∂ψ
∂∂ε
==−−
(3.224)
D.2.4. Metoda forţelor reziduale corespunzătoare frecvenţelor proprii
{ } [ ] [ ]( ){ }{ } [ ] [ ] { } x
ri
xr
ii
F
xr
xrF
uM
uK
u
MK
r
r
ψ∂
∂ω∂
∂∂ε∂
ψωε
−=
−=
2
2
(3.225)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
133
În mod asemănător se poate scrie o relaţie asensibilităţii forţelor reziduale pentru cazul vibraţiilor forţate:
{ } {} [ ] [ ]( ) ( ){ } xvjjvfj HMK ωωε 21 −−= (3.226)
unde: { } v1 este un vector cu toate elementele nule cu excepţia
elementului v . Deci:{ } [ ] [ ] { } x
vji
rii
fj HuM
uK
u
−−=
∂∂ω
∂∂
∂ε∂ 2 (3.227)
D.2.5. Metoda reziduală a funcţiilor de răspuns înfrecvenţăVectorii reziduali se definesc astfel:{ } ( ){ } ( ){ } x
vjavjHj HH ωωε −= (3.228)
Dacă se multiplică la stânga ecuaţia matricială:{ } {} [ ] [ ]( ) ( ){ } x
vjjvfj HMK ωωε 21 −−= (3.229)
cu matricea [ ]ajH se obţine forma liniarizată a vectorilor
reziduali:
[ ] { } [ ]{ } [ ] [ ] [ ]( ){ } [ ] [ ] { }Hjxvj
avj
xvjjjvjfj
aj HHHMKHHH εωε =−=−−= 21
(3.230)Dezvoltarea în serie Taylor a acestei forme liniarizate se
scrie astfel:
{ } [ ] { }{ } [ ] { }{ } [ ]∑∑==
+=
+=
uu N
ii
i
fjaj
oHj
N
ii
i
fjaj
ofj
aj
linHj u
uHuu
uHuH
11∆
∂∂ε
ε∆∂∂ε
εε

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
134
D.2.6. Metoda reziduală a maselor{ } [ ]{ }RMRm,mm taxa
m =−=ε (3.231)
şi { }R este un vector ce descrie mişcarea de corp rigid cuacceleraţia de 1m/sec2, deci sensibilitatea este:
{ } [ ] { }RuMR
u i
t
i
m
∂∂
∂∂ε = (3.232)

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
135
CAPITOLUL IVELEMENTE DE ANALIZĂ
SEISMICĂ A SISTEMELORMECANICE
4.1. Introducre
Protecţia seismică se impune ca o condiţie absolută încazul echipamentelor ce fac parte din instalaţiile unor centralenucleare, unde riscurile producerii unor avarii sunt foartemari, urmările acestor accidente fiind deosebit de grave (deexemplu accidentul din mai 1986 de la centrala nuclearăCernobâl).
Comportarea seismică a echipamentelor este de fapt oproblemă de vibraţii specifică ingineriei seismice. Dinamicastructurilor supuse acţiunii seismice are ca factor de iniţieremişcarea fundaţiei (intrarea seismică de bază), care în generalse caracterizează printr-un spectru haotic spaţial, tranzitoriuşi violent, care generează schimbări bruşte de energie, de celemai multe ori cu urmări catastrofale.
Răspunsul seismic al unei structuri, în cele mai multecazuri conduce la câmpuri de tensiuni şi deformaţii dindomeniul postelastic , care au deci un pronunţat caracterneliniar. În plus, structurile acţionează fără deosebire, ca filtredinamice, amplificând acele componente spectrale ale intrăriiseismice ale bazei care au frecvenţele apropiate de frecvenţeleproprii ale structurii.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
136
Calificarea seismică a echipamentelor este un procesformal (procedural) având ca scop demonstrarea într-un modfundamental şi repetabil a capacităţii lor de a-şi păstraintegritatea structurală şi rolul funcţional în timpul şi/saudupă ce au fost supuse unui test seismic.
4.2. Calificarea seismică a echipamentelorCalificarea seismică este o specificaţie care stabileşte
modul de analiză şi testare a unui echipament în scopuldemonstrării capacităţii de a-şi păstra integritatea şi abilitateaprin performanţele necesare în timpul şi după apariţia unuicutremur DBE- Design Basic Earthquake sau SDE- SiteDesign Earthquake [75]. Criteriile privind modul defuncţionare pentru fiecare tip de cutremur şi echipament suntprevăzute în “Ghidul de Siguranţă al Sistemelor pentru CNE”
Calificarea seismică se poate face prin:1. Analiza seismică2. Testul seismic3. Analiza şi testul seismic
Adoptarea analizei seismice se face atunci cândcomportarea dinamică poate fi modelată adecvat. În cadrulacestui tip de analiză se fac următoarele ipoteze:• cutremurul proiectat se consideră că este superior ca
intensitate celui real;• cutremurul proiectat se consideră a fi singurul aplicabil în
perioada duratei de viaţă a uzinei;• pentru acele componente care sunt supuse unor solicitări la
oboseală având un nivel minim specificat, analiza seismicăva fi însoţită de încercări specifice la oboseală;
• pentre încărcările neseismice tranzitive se va face câte oanaliză specială în funcţie de tipul lor astfel:

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
137
a. încărcări neseismice tranzitive de 15 minute care potapărea zilnic
b. încărcări neseismice tranzitive de 8 ore care pot apărealunar
c. încărcări neseismice tranzitive de 4 zile care pot apăreaodată pe an.
4.3. Tipuri de cutremure bază deproiectare, spectrul de răspuns al solului.DBE- Design Basic Earthquake este o reprezentare
ipotetică a efectelor combinate ale cutremurelor cu o micăprobabilitate de producere şi se exprimă printr-un spectru derăspuns al solului pe două direcţii orizontale şi una verticalăsau pe două direcţii orizontale şi una verticală având o duratăde 30 secunde.
SDE- Site Design Earthquake este o reprezentareipotetică a efectului unui presupus cutremur (de magnitudineridicată) care poate avea loc în zona uzinei cu o rată de 1eveniment la 100 de ani şi se exprimă printr-un spectru derăspuns al solului pe două direcţii orizontale şi una verticalăavând o durată de 10 secunde.
Spectrul de răspuns al solului este exprimarearăspunsului sub formă de deplasări, viteze sau acceleraţiipentru diferite frecvenţe naturale ale solului în timpul unuicutremur de tipul specificat mai sus. Acesta poate fi definitdupă trei direcţii , pentru diferite cote ale construcţieicorespunzătoare locului de montaj al echipamentului. Aşacum se obsevă din fig. 4.1 acest spectru diferă ca formă de laun tip de suporţi la altul şi ca intensitate de la o cotă aconstrucţiei la alta.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
138
Suporţii flexibili sunt acele legături care sunt capabilesă suporte frecvenţe naturale ale solului joase (sub 20 Hz) şi lecorespunde spectrul de răspuns după curba C din fig.4.1.Întrucât suporţii flexibili amplifică efectul cutremurului asupraunui echipament, calificarea ehipamentului se face înmajoritatea cazurilor pentru acest nivel ridicat de solicitaresau pentru un nivel superior celui prevăzut pentru suporţisemirigizi , cărora le corespunde spectrul de răspuns dupăcurba A din fig.4.1.
Suporţii rigizi sunt acele legături care sunt capabile săsuporte frecvenţe naturale ale solului mai mari de 33 Hz şilor le corespunde spectrul de răspuns după curba B din fig.1.
La calificarea seismică a unui echipament se folosescurmătoarele criterii de acceptabilitate corespunzătoare celordouă categorii de calificarea seismică A şi B:
12
10
8
6
4
2
0
1 2 3 4 5 6 7 8 910 20 30 40 50 Hz
Accelera]ia
*10m/s2
BBBB
CCCC
AAAA
Fig. 4.1

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
139
• categoria A care necesită testarea şi/sau analiza seismicăpentru demonstrarea menţinerii presiunii şi pentru a seasigura oprirea centralei, atât în timpul cât şi după uncutremur DBE (echipamete pasive);
• categoria B care necesită testarea şi/sau analiza seismicăpentru demonstrarea menţinerii presiunii şi funcţionareaatât în timpul, cât şi după un cutremur DBE, precum şipentru a se asigura oprirea centralei (echipamete active);
În afară de cele două categorii de calificare, criteriilede calificare seismică mai ţin seama de:
• tipul echipamentului (cu/fără masă exterioară);• dimensiunile de gabarit;• clasa nucleară a echipamentuluiDacă testele seismice efectuate pe anumite tipuri de
echipamente furnizează suficiente valori ale caracteristicilorseismice, ele pot fi utilizate , prelucrate şi monitorizate încadrul analizei seismice, pentru a demonstra că echipamentulpoate realiza funcţiile specificate categoriei de calificareaseismică.
4.4. Testul seismic pe o structură dată Pentru efectuarea testului seismic, s-a folosit o
structură formată dintr-o armătură de conducte (prototip) dinfabricaţia UPET-SA Târgovişte, destinată părţii clasice acentralei nuclearo-electrice Cernavodă (desesn CV 224 -Robinet cu ventil Dn 1” cls. 600, oţel carbon, mufe soclu,capete cu fanşe sudate, acţionare electrică BIFFI) avândcaracteristicile funcţionale şi încercările specifice, prezentateîn tabelul 4.1.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
140
Prototipul a fost proiectat şi executat în conformitate cuspecificaţiile tehnice ISPE nr. 79-70830-R001-PT-A / mod.B;specificaţiile tehnice ISPE nr. 79-70830-R004-PT-A / mod.B;prescripţiile tehnice ISCIR NC4-87; Caietul de sarcini CV044-CS.
Încercările echipamentului şi furniturii aferente (douăcapete de conducte de 535 mm, dispozitivele de fixare pemasa seismică a ansamblului, furtune de alimentare, etc) s-auefectuat pe Standul de încercări la seism şi vibraţii MTS(SUA) al EUROTEST-SA Bucureşti, prezentat în fig. 4.2, alecărei caracteristici şi performanţe sunt date în tabelele 4.2 şi4.3.
Tabelul 4.1Diametrul nominal 1”Număr desen CV – 224 – 0Fişa tehnică ISPE C2-43210-R014-
DSC2-43210-R017-
DSFluid de lucru apăTemperatura de lucru 310 630
Temperatura de calcul 1300
Căderea maximă depresiune
4000 kPa
Presiunea de calcul 4100 kPaÎncercarea hidrostatică de rezistenţă
conformANSI
B16-34
presiunea154 bar
ratascăpărilor
0Încercarea hidrostatică de etanşeitate
conformANSI
B16-34
presiunea113 bar
ratascăpărilor2 cm3/oră
Încercarea hidrostatică de etanşeitate a scaunului
conformANSI
B16-34
presiunea113 bar
ratascăpărilor1,7 cm3/oră
Coeficientul de debit 5,2 m3/oră

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
141
Tabelul 4.2Specificaţia Masa mare
Dimensiunile mesei 2 m x 2 mMasa maximă a specimenului 3000 kg Grade de libertate controlateTranslaţii X, Y, ZRotaţii OX, OY, OZ PerformanţeLongitudinal (X) şi lateral (Y)Deplasare ± 265 mmViteza ± 2,14 m/sAcceleraţia maximă la sarcinanominală de 500 kg
± 5 g
Forţa statică ± 18,2 MT/axa
Tabelul 4.3 Performanţe Vertical (Z)Deplasare ± 177 mmViteza ± 1,43 m/sAcceleraţia maximă la sarcinanominală de 500 kg
± 3,35 g
Forţa statică ± 23,3 MT/axa Momentul maxim de răsturnare al specimenuluiMx, My 3000 kgf-mDomeniul frecvenţelor de lucru 0,5-100 Hz
Aparatele şi dispozitivele din componenţa lanţului demăsurători, de fabricaţie Bruel & Kæjer (B&K) sunt :• accelerometre triaxiale 4321 şi condiţionere de semnal
2626• placă de achiziţie de semnal: National Instrument AT-MIO16L-9 (16 canale de intrare ± 10V; 2 canale de ieşire ± 10V;rata maximă de eşantionare 100 Hz/16 canale).

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
142
• calculator şi program pentru achiziţia şi prelucrareadatelor (Pentium MMX 233 MHz, 64 MB RAM, 3,2 GBHDD; Software pentru achiziţie şi prelucrare date realizatîn EUROTEST sub mediul de programare LabVIEW 4.0)
Încercările echipamentului şi furniturii aferenteefectuate pe standul de încercări la seism şi vibraţii MTS auconstat dintr-un număr de 3 experimente reuşite penruurmătoarele condiţii de prindere:1. la capetele conductei (situate la cca 1300 mm) şi cu
două coliere intermediare situate la distanţa de cca 400mm.
2. la capetele conductei (situate la cca 1300 mm) şi cu unsingur colier intermediar situat la distanţa de cca 200mm de axa verticală a armăturii.
3. la capetele conductei.Rezultate celor trei teste sunt prezentate în tabelul 4.4.În fig. 4.2 este prezentată armătura pe standul de încercări.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
143
Tabelul 4.4Rezultate obţinute (primele 3 frecvenţe proprii, în Hz)
(direcţiile OX,OY, OZ, sunt conform fig.4.2)după OX după OY după OZ
Testulnr.
Condiţiilede testare
Modul deprindere pe
stand1 2 3 1 2 3 1 2 3
Fig.4.3 Fig.4.4 Fig. 4.51 (baleiaj 5)canale:
excitaţie: 0,1,2răspuns: 3,4,5
baleiaj 0...33Hz
acceleraţia:0,5g
la capete+2 coliere
intermediare 4,2 22,4 28 4,2 22,1 26 4,1 22,1 26
Fig. 4.6 Fig. 4. 4.7 Fig. 4.82 (baleiaj 6)canale:
excitaţie: 0,1,2răspuns: 3,4,5
baleiaj 0...33Hz
acceleraţia: 0,5g
la capete+1 colier
intermediar 4,1 19,2 27,5 4,1 22 25 4,1 22 27,5
Fig. 4.9 Fig. 4.10 Fig. 4.113 (baleiaj 7)canale:
excitaţie: 0,1,2răspuns: 3,4,5
baleiaj 0...33Hz
acceleraţia: 0,5g
la capetefără coliere
intermediare 4,2 15,4 22 4,2 15,5 22 4,2 15,3 22

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
144
Y
X
Z
Fig. 4.2 Vedere general\ a arm\turii pe standul de `ncercare [i a sistemului de axe

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
145
Fig.4.3 Test nr.1 ( Func]ia de transfer dup\ OX )

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
146
Fig.4.4 Test nr.1 ( Func]ia de transfer dup\ OY )

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
147
Fig. 4.5 . Test nr.1 ( Func]ia de transfer dup\ OZ )

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
148
Fig.4.6 . Test nr.2 ( Func]ia de transfer dup\ OX )

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
149
Fig.4.7 . Test nr.2 ( Func]ia de transfer dup\ OY )

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
150
Fig.4.8 . Test nr.2 ( Func]ia de transfer dup\ OZ )

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
151
Fig.4.9 . Test nr.3 ( Func]ia de transfer dup\ OX )

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
152
Fig.4.10 . Test nr.3 ( Func]ia de transfer dup\ OY )

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
153
Fig.4.11 . Test nr.3 ( Func]ia de transfer dup\ OZ )

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
154
4.5. ConcluziiDin analiza diagramelor prezentate în fig. 4.3 ... 4.11 sepot trage următoarele concluzii:
• pe canalele 0 , 1 şi 2 sunt prezentate diagramele variaţieiîn timp a acceleraţiei de excitaţie a bazei: forma eispecifică derivă din necesitatea de a menţine liniaritateaspectrului de intrare (eliminarea unor frecvenţe proprii alemesei seismice) în timpul baleierii frecvenţelor de lucru;neliniaritatea care se observă după un anumit interval detimp, se datorează faptului că platforma seismică trece larândul ei prin câteva frecvenţe proprii care trebuiecompensate astfel încât să nu se influenţeze forma liniară(constantă) a spectrului de răspuns al solului (fig. 1, curbaB);
• pe canalele 3 , 4 şi 5 sunt prezentate diagramele variaţieiîn timp a acceleraţiei de răspuns a structurii măsurată înpunctul A (fig.2) după cele trei direcţii OX, OY respectivOZ ; se poate observa din aceste diagrame creşteriaccentuate ale acceleraţiei la anumite momente aletestului, care corespund frecvenţelor proprii ale structurii;
• a treia diagramă este cea a funcţiei de transfer, care aratăclar frecvenţele de rezonanţă ale structurii; deşi forma eidiferă după celele trei axe pentru fiecare test, frecvenţelede rezonanţă au aceeaşi localizare pe fiecare dintre acestea;
• se observă că prima frecvenţă proprie situată în jurul valoride 4 Hz (caracterizată de amplitudini moderate) nu depindede modul de fixare a structurii şi corespunde vibraţiilor decorp solid a armăturii; frecvenţa următoare este de faptprima frecvenţă proprie a ansamblului

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
155
• din punct de vedere al analizei seismice frecvenţelesuperioare valorii de 33Hz pot fi ignorate, datorită faptuluică pentru acestea nu se va ajunge niciodată la rezonanţă petimpul unui seism;
• se observă pentru testele 2 şi 3 o alunecare a primeifrecvenţe proprii spre valori inferioare, pe măsură ce sediminuează rigiditatea sistemului de fixare: prima frecvenţăproprie scade de la aproximativ 22 Hz (pentru cazul fixăriirigide, cu două coliere intermediare) la 19,2 Hz (pentrucazul fixării semirigide, cu un colier intermediar) respectivla 15,4 Hz (pentru cazul fixării elastice, fără coliereintermediare);
• datorită excentricităţii importante a sistemului de acţionareelectrică a armăturii (a masei exterioare mari) au putut fiobservate deformaţii flexionale şi torsionale foarte mari întimpul testului seismic (cu amplitudini foarte mari); acestfapt se poate observa şi din forma funcţiei de transfercorespunzătoare axelor OY şi OZ care corespund acestortipuri de deformaţii.





MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
156
BIBLIOGRAFIE
1. Allemang, R. - Vibrations: Analitycal and ExperimentalModal Analysis. Course text, University ofCincinnati, Ohio, USA, june 1992, pp.158.
2. Allemang, R. - Investigation of Some Multiple Input/OutputFrequency Response Function ExperimentalModal Analysis Techniques. Ph.D.Dissertation, University of Cincinnati, Ohio,USA, Mechanical Engineering Dep.1980 .
3. Allemang, R., Brown, DSoni, M
- Experimental Modal Analysis and DynamicComponent Synthesis , Vol. IV: Systemmodeling Techniques. Report AFWAL-TR-87-3069, Wright-Patterson AFB, Ohio, USA,1987.
4. Allemang, R., Brown, D - A correlation coefficient for modal vectoranalysis; Proceedings of the 1th InternationalModal Analysis Conference Orlando, Florida,1982, pp.110-116.
5. Baruch, M. - Optimization procedure to correct stiffness andflexibility matrices using vibrations tests.AIAA Journal, Vol. 21, No.11 1978, pp 1208-1210.
6. Berman, A., Nagy, A. - Improvement of a large analytical model usingtest data. AIAA Journal, Vol. 21, No.8 1983,pp 1168-1173.
7. Berman, A., - Shock and Vibration Digest, 7, 1, 10 (1975)8. Brebbia, C. A.,
Ferrante, A.J.- Computationals Methods for the solution of
Engineering Problems. London PlymouthPentech-Press, New York, 1978
9. Buzdugan, Gh., ş.a. - Măsurarea vibraţiilor. Editura Academiei,Bucureşti, 1979.
10. Caesar, B. - Update and identification of dynamicmathematical models. Proceedings of the 5thInternational Modal Analysis Conference,London, UK, 1987, pp.453-459

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
157
11. Caesar, B. - Update and identification of dynamicmathematical models, Proceedings of the 5th
International Modal Analysis Conference,Orlando, Florida, 1982, pp.394-401.
12. Caughey, T.K.,O’Kelly, M.E.J.,
- Journal Application Mechanical, Series E, 32,1, 583 (1965).
13. Chen, J., Kuo, C.Garba, J.
- Direct structural parameter identification bymodal test results. Proceedings of the 24thStructural Dynamics and Materials Conference,1983, pp.44-49
14. Davis, J. C., - S. A. E., Paper Nr. 720045 (1972).15. Deck, A., - O.N.E.R.A, Techn. Paper Nr. 870 (1970).16. Dimarogonas, A.D.,
Haddad, S.- Vibration for Engineers. Prentince Hall, Inc.
New Jersey, 1992
17. Dinu, T. - Răspunsul dinamic pentru structurile cuamortizare oarecare şi număr mare de gradede libertate. Buletinul Universităţii “Petrol-Gaze” Ploieşti, Vol. LI Nr. 2-1999, pp.402
18. Dumitraşcu, Gh.,Dumitrescu, I.
- Consideraţii asupra modelării matematice aproceselor dinamice. Buletinul ştiinţific nr. 1 alAcademiei navale “Mircea cel Bătran”,Constanţa 1994.
19. Durate, M.L.M.,Ewins, D.J.
- Modal Versus Coupling: Comparison ofPrediction when Using the Same Input Data.Proceedings ISMA 2. Noise and VibrationEngineering, vol. III, Leuven, 1996, pp1743
20. Ewins, D.J. - Modal Testing: Theory and Practice. ResearchStudies Press Ltd., England, 1984.
21. Fissete, E., Ibrahim, S.Stavrinidis, C.
- Error location and updating of analyticaldynamic models using a force balance method.Proceedings of the 6th International ModalAnalysis Conference, Kissimmee, Florida,1988, pp.1063-1070.
22. Fox, R.L., Kapoor, M.P. - Rates of Change of Eigen values andEigenvectors. AIAA Journal, Vol.6, 1968,pp.2426-2429.
23. Fraezer, R.A, Duncan,W.J , Collar, A.R.
- Elementary Matrices, MacMillian Company,New York, 1946

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
158
24. Guyan, R. - Reduction of Stiffness and Mass Matrices.AIAA Journal, Vol.3, No.2, 1965, pp.380.
25. Heylen, W. - Correlation between experimental and modalresults. Proceedings of the 14th InternationalSeminar on Modal Analysis Leuven, Belgium,1989.
26. Heylen, W., Sas, P. - Review of Model Optimisation Techniques.Proceedings of the 5th International ModalAnalysis Conference, London, UK, 1987, pp.1177-1182
27. Heylen, W., Lammens,St., Sas, P.
- Modal Analysis Theory and Testing. PMA,Leuven, Belgium, 1995
28. Heylen, W., Sas, P.,H. Van der Auveraer
- Excitation Cnsideration for ExperimentalModal Analysis. Proceedings of the 5th
International Modal Analysis Conference,Firenze, Italy, PMA-KU, Leuven, Belgium,sept. 1991
29. Ibrahim, S., Mikulcik,E. - A Method from the Direct Identification ofVibration Parameters from the Free Response.Shock and Vibration Bulletin 47/4, 1977,pp.183-198.
30. Ibrahim, S. - Modal Confidence Factor in Vibration Testing.AIAA Journal of Spacecraft and Rockets 15/5.1978, pp.313-316.
31. Imergun, M., Visser, W. - A Review of Model Updating Techniques.Shock and Vibration Vol.23, No.1, 1990.
32. Janter, T. - Construction Oriented Updating of DynamicFinite Element Models using ExperimentalModal Data. Ph.D dissertation, Leuven,Belgium, 1989.
33. Juang, J.N., Pappa, R - An Eigensystem Realisation Algorithm (ERA)for Modal Parameter Identification and ModelReduction. Journal of Guidance Control andDynamics, Vol. 8, No.5, sept. 1985, pp. 620-627.
34. Kidder,R. - Reduction of Structural Frequency Ecuations.AIAA Journal, Vol.11, No.6, 1973, pp.892.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
159
35. Klosterman, A. - On The Experimental Determination and Useof Modal Representation of DynamicCharacteristics. Ph. dissertation, University ofCincinnati, Ohio, USA, 1971.
36. Lallement, G., Link, M.,Caesar, B. ş.a.
- Procedures for Updating DynamicMathematical Models. ESA, 1991.
37. Lammens, S.,Heylen, W., Sas, P.
- Error Localisation Methods: on Overview ofSome Evaluation Results at K.U.Leuven.Proceedings of the 5th International Seminar OnModal Analysis, Leuven, Belgium, 1990.
38. Lammens, S., Heylen,W., Sas, P.
- Model Updating using frequency ResponseFunction: Case Studies. Proceedings of the 5th
International Conference Structural DynamicsModelling Test, Analysis and Correlation,Milton Keynes, UK, 1993, pp.195-204.
39. Lancaster, P., - Lambda-Matrices and Vibrating System,Pergamon Press, Oxford, 1966.
40. Landsheer, A. - Dynamic Optimisation with Modal Analysis.DYNOPS Useranual, March, 1984.
41. Larsson, P. - Model Updating based on Forced Vibrations.Proceedings of the Chou-KU Leuven-U.C.Seminar, Tokio, Japan, 1991.
42. Lembergs, F. - Parameter Estimation in Modal Analysis.Proceedings of the 14th International SeminarOn Modal Analysis, Leuven, Belgium, sept1989, pp.33.
43. Lembergs, F. - Frequency Domain Identification Techniquesfor Experimental Multiple Input ModalAnalysis. Ph. dissertation , Dept. Of Mech.Eng. , KULeuven, Belgium, december 1989,pp.260.
44. Leurdian, J., H Van derAuweraer, Mergeay, M.
- Review of Parameter Estimation Techniques.Technical Report for ESPRIT Project 1561 the13th International Seminar On Modal Analysis,Leuven, Belgium, sept 1988, pp.60.
45. Lieven, N. Ewins, D
.
- Expansion of Modal Data for Correlation.Proceedings of the 8th International ModalAnalysis, Kissimmee, Florida, 1990, pp. 605.

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
160
46. Lieven, N. Ewins, D. - Spatial Correlation of Mode Shapes, theCoordinate Modal Assurance Criterion(COMAC). Proceedings of the 6th InternationalSeminar On Modal Analysis, Leuven, Belgium,1987, paper C1-3.
47. Link, M. - Identification of Physical System Matricesusing Incomplete Vibration Test Data.Proceedings of the 4th International ModalAnalysis Conference, Los Angeles, 1986.
48. Lipkens, J.,Vandeurzen, U.
- The Use of Smoothing Techniques forStructural Modification Applications.Proceedings of the 6th International ModalAnalysis, Kissimmee, Florida, 1988, pp. 690.
49. Marinescu, O.,Sireteanu,T.,Felecan, O.Ghiţă, Gh.
- Metode moderne de determinare aaccelerogramelor sintetice pentru analiza şitestarea seismică a structurilor. BuletinulUniversităţii “Petrol-Gaze” Ploieşti, Vol. LI Nr.1-1999, pp.85-90
50. Marin, C. - Contract de cercetare CNCSU: Cercetăriprivind comportarea în regim dinamic aarmăturilor industriale destinate instalaţiilorcare necesită siguranţă deosebită înfuncţionare -chimie, petrochimie apă grea,CNE - Faza I, Studiu tehnic 1995; Faza a II-a:Modelarea matematică a fenomenelor cecaracterizează funcţionarea în regim dinamic -1996;
51. Marin, C. Teza de doctorat :“Contribuţii la studiulîmbinărilor suprafeţelor recipientelor şianvelopelor sub presiune în regimuri statice şidinamice ” . Catedra de Mecanică a U.P.Bucureşti , noiembrie 1999
52. Marin, C. - Tendinţe actuale în cercetarea experimentală aarmăturilor industriale în domeniul analizeiseismice. Buletinul de comunicări al Sesiuniijubiliare: “50 de ani de la ÎnfiinţareaUniversităţii Ploieşti” 28-29 mai 1998.
53. O’Callahan, J.Avitabile, P.
- System Equivalent Reduction ExpansionProcess (SEREP). Proceedings of the 7th
International Modal Analysis Conference, Las

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
161
Vegas, Nevada, 1989, pp.29-37.54. O’Callahan, J. - A Procedure for an Improved Reduced System
(IRS) Model. Proceedings of the 7th
International Modal Analysis Conference, LasVegas, Nevada, 1989, pp.17-21.
55. Pavel, A. - Stabilitatea recipientelor. Editura Academiei,Bucureşti, 1985.
56. Pavel, E. - Elemente de analiză modală. Editura tehnică,Bucureşti, 1994.
57. Panet, M. Merieux, C. - Valve Spectral Approximation . ProceedingsISMA 2, Noise and Vibration Engineering, vol.III, Leuven, sept. 1996.
58. Posea, N., Anghel, Al. - Calculul dinamic al sistemelor de conducteţinand seama de influenţa cedărilor dinreazeme. Mine Petrol şi Gaze nr. 8., 1983
59. Posea, N., ş.a. - Calculul dinamic al structurilor. EdituraTehnică, Bucureşti 1991.
60. Posea, N., ş.a. - Statica şi dinamica sistemelor de conducte.Editura Academiei Române , Bucureşti 1996.
61. Posteucă, R. - Metodologie de calcul pentru vibraţiilesistemelor de conducte din industriapetrochimică. S.C.I.P.I.P- SA Ploieşti, 1991.
62. Radeş, M. - Metode dinamice pentru identificareasistemelor mecanice. Editura Academiei,Bucureşti 1979.
63. Radeş, M. - Modal analysis of rotor Bearing systems usingmonophase model vectors. Proceedings ISMA2. Noise and Vibration Engineering, vol. III,Leuven, sept. 1996.pp 1541-1549.
64. Randall, R. - Frequency Analysis. Bruel & Kajaer, 1987.65. Samson, R.C. - Criteria for Evaluating Steady State Piping
Vibrations of Nuclear Power Plants. ASMEPublications , New York, 1983.
66. Sidhu, J. Ewins, D. - Correlation of Finite Element and Modal TestStudies of a Practical Structure. Proceedings ofthe 2th International Modal AnalysisConference, Orlando, Florida, 1984, pp.756.
67. Vanhonacker, p. - The Use of Modal Parameters of Mecanichal

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
162
Structures in Sensitivity Analysis , SystemSynthesis and System Identification Methods.Ph. dissertation , Dept. Of Mech. Eng. ,KULeuven, Belgium, sept 1988, pp.250.
68. Van Brussel, H.,Mertens, M., H Van derAuweraer, Leurdian, J.
- Study of Available Techniques to identiffy andCaracterise non-linearities by Test. EspritProject 1561 Report. Proceedings of the 14th
International Seminar On Modal Analysis , Part2 PMA KU.Leuven, Belgium, sept 1988.
69. Vasilescu, Ş., Talle,V. - Particularizări privind vibraţiile cilindrilor înteoria de înveliş. Buletinul Universităţii“Petrol-Gaze” Ploieşti, Vol. LI Nr. 2-1999,pp.197-200.
70. Wachel, I.C. - Technique for Controlling Piping Vibrationand Failures, ASME Conference, sept. 1976.
71. Wilson, E.L. - A Static Analysis Program for ThreeDimensional Solid Structures. Denver MiningResearch Center USA, sept 1971.
72. Ziaei Rad, S. Imregun,M.
- Use of Generic Elements for Model Updating.Proceedings ISMA 2. Noise and VibrationEngineering, vol. III, Leuven, 1996. pp. 1895-1906.
73. * * * - N. CADA- Modal/Analysis User Manual,Rev.2.3, LMS, International Leuven , Belgium
74. * * * - Tecnical specification TS - XX - 30 000 -5Seismic Qualification of Equipement. Revisione2, dec, 1977, Atomic Energy of Canada Limited(AECL).
75. * * * - Spectre de răspuns aferente CNE CernavodăU4 - U5, Document IRNE nr 8 /8332 din 5. 06.1989.
76. * * * - Contract de cercetare CEPROAR –Analizadimamică seismică
77. Craig, R. - Structural Dynamics: An Introduction toComputer Methods, John Wiley & Sons , NewYork, 1981, pp467-496

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
163
CUPRINS
INTRODUCERE
CAPITOLUL 1 ELEMNTE DE TEORIA VIBRAŢIILOR SISTEMELOR LINIARE DISCRETE
1.1. Vibraţiile sistemelor conservative1.1.1 Vibraţii libere1.1.2. Vibraţiile sistemelor conservative
1.2. Vibraţiile sistemelor forţate ale amortizate cu n gradede libertate
1.2.1. Ipoteze asupra amortizării1.2.2. Moduri reale clasice de vibraţie
1.2.2.1. Amortizarea vâscoasă1.2.2.2. Amortizarea histeretică
1.2.3. Moduri complexe de vibraţie1.2.3.1. Cazul amortizării vâscoasă1.2.3.2. Cazul amortizării histerezice
CAPITOLUL 2 IDENTIFICAREA DINAMICĂ A SISTEMELOR MECANICE
2.1. Generalităţi2.2. Determinarea experimentală
2.2.1. Metode de identificare folosind o excitaţie impusă2.2.2. Metode de identificare folosind excitaţii aleatoare2.2.3. Metode de identificare folosind excitaţii pseudo-
aleatoare2.2.4. Metode de identificare folosind excitaţii din
funcţionarea structurii2.2.5. Metode de identificare folosind modele ajustabile
2.3. Structura modelelor analitice2.3.1. Modele analitice discrete2.3.2. Modele analitice modale

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
164
2.3.3. Structura parametrilor modelelor analitice2.3.4. Trecerea de la modelul modal la modelul fizic
2.4. Identificarea dinamică a sistemelor cu excitaţiearminică într-un punct2.4.1. Principiul metodei de identificare2.4.2. Identificarea sistemelor neamortizate
2.4.2.1. Metoda curbelor de răspuns înfrecvenţe
2.4.2.2. Metoda diagramelor schelet2.4.2.3. Metoda modelului modal
CAPITOLUL 3 MODELE ACTUALE UTILIZATE ÎN DOMENIUL ANALIZEI MODALE
3.1. Testul experimental propriu-zis3.2. Achiziţia de date pentru estimarea FRF3.3. Identificarea dinamică a sistemelor şi estimarea
caracteristicilor dinamice3.4. Validarea modelului
a. Metoda factorului de scară modal (MSF) şi criteriul deasigurare modală(MAC)
b. Metoda participării modale (MP)c. Metoda reciprocităţii FRFd. Metoda valorilor modale complexe (MOV)e. Metoda coliniarităţii fazelor modale (MPC) şi a
abaterii medii a fazei (MPD)f. Metoda factorului de încredere modalg. Metoda funcţiei sintetizate de răspuns în frecvenţă
3.5. Utilizarea parametrilor modalia. Analiza în forţeb. Analiza de sensibilitatec. Sinteza modificărilor dinamice structurale şi de
asamblarec1. Tehnica sintezei modalec2. Tehnica flexibilităţii dinamicec3. Tehnica rigidităţii dinamicec4. Tehnica sintezei componentelor modale
3.6. Tehnici de ajustare, corelare şi corectare a modelului

MARIN CORNEL - ANALIZA DINAMICĂ A STRUCTURILOR LINIAR ELASTICE
165
A. Ajustarea modeluluiA1.Tehnici de reducere a modelului analiticA2. Tehnici de extindere a modelului analiticB. Tehnici de corelare a parametrilor modaliB1. Tehnica diferenţei frecvenţelor de rezonanţăB2. Tehnica comparării vizuale a modurilor propriiB3. Tehnica criteriului de asigurare modală(MAC)B4. Tehnica criteriului de asigurare modală globalB5. Tehnica comparării vizuale a FRFB6. Tehnica ortogonalităţii combinate şi eterogeneC. Selectarea parametrilor modaliC1. Tehnica criteriului de asigurare modală globalC2. Metoda matricii erorilorC3. Metoda echilibrului forţelorD. Corectarea parametrilor modaliD1. Metode directe de corecţieD2. Metode iterative de corecţie bazate pe sensibilitateaparametrilor
CAPITOLUL 4 ELEMENTE DE ANALIZĂ SEISMICĂ A SISTEMELOR MECANICE
4.1. Introducere4.2. Calificarea seismică a echipamentelor4.3. Tipuri de cutremure de bază , spectre de răspuns ale
solului4.4. Testul seismic pe o structură dată4.5. Concluzii
BIBLIOGRAFIE