
agts
173
Suport de curs pentru Algebră Liniară, Geometrie Analitică, Geometrie Diferenţială şi Trigoometrie Sferică
-
Upload
iulia-negoescu -
Category
Documents
-
view
90 -
download
6
description
AGTS
Transcript of agts

Suport de curs pentru Algebră Liniară, Geometrie Analitică, Geometrie Diferenţială şi Trigoometrie Sferică
CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
5
Prefaţă
Prezenta lucrare cuprinde o versiune a cursului de algebră, geometrie
analitică, trigonometrie sferică şi geometrie diferenţială, pe care l-am ţinut
studenţilor din anul I în cadrul Academiei Navale “Mircea cel Bătrân”.
Intenţia mea a fost de a cuprinde într-un volum de dimensiuni
rezonabile un număr cât mai mare de rezultate de bază, care să acopere
programa propusă, expuse într-o manieră accesibilă oricărui student al
anului I dintr-o instituţie tehnică.
La redactarea acestei lucrări am avut în vedere atât rigoarea
matematică cât şi claritatea şi accesibilitatea expunerii.
Camelia Ciobanu
CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
6
BIBLIOGRAFIE
1. Gh. Atanasiu ş.a., Culegere de probleme de algebră liniară, geometrie
analitică, diferenţială şi ecuaţii diferenţiale, Editura 1995. 2. S. Barnett, Matrices: Methods and Applications, Clarendon Press, Oxford,
1990. 3. T.S.Blyth. E.F. Robertson, Matrices and Vector Spaces, Chapman and Hall, London,
1986. 4. N. Bourbaki, Algèbre, Chapt. II (Algèbre lineaire), Chap. III (Algèbre
multilinéaire) Sci. Ind. Hermann, Paris. 5. C. Ciobanu, Algebră liniară, geometrie analitică, geometrie diferenţială,
Editura Academia Navală “Mircea cel Bătrân”, Constanţa, 1996. 6. C. Ciobanu, Algebră şi geometrie, Editura Academia Navală “Mircea cel
Bătrân”, Constanţa, 2002. 7. C. Ciobanu, Capitole de Algebră liniară, geometrie analitică şi diferenţială,
trigonometrie sferică, Editura Muntenia, Constanţa, 2005. 8. C. Ciobanu, Capitole de Algebră liniară, geometrie analitică şi diferenţială,
trigonometrie sferică - Aplicaţii, Editura Muntenia, Constanţa, 2005. 9. M. Craioveanu, I. Albu, Geometrie afină şi euclidiană, Editura Facla,
Timişoara, 1982. 10. Creangă, C. Reischer, Gr. C. Mărculescu, Algebră liniară, Editura Didactică şi
Pedagogică, Bucureşti, 1970. 11. V. Cruceanu, Elemente de algebră liniară şi geometrie, Editura Didactică şi
Pedagogică, Bucureşti, 1990. 12. N. Donciu, D. Flondor, Algebră şi analiză matematică, culegere de probleme,
Vol. I, II, Editura Didactică şi Pedagogică, Bucureşti, 1990. 13. N.V. Efimov, E.R. Rozendorn, Linéar Algèbra and Multidimensional
Geometry, Editura Mir. Moscow, 1975. 14. I.M. Ghelfand, Lecţii de algebră liniară, Editura Tehnică, Bucureşti, 1953. 15. G. Gîndac, S. Corbu, Culegere de probleme de algebră liniară şi geometrie
analitică şi diferenţială, I.P.B., Bucureşti, 1965. 16. Gh. Gheorghiev, R. Miron, D. Papuc, Geometrie analitică şi diferenţială,
Vol. I, II, Editura Didactică şi Pedagogică, Bucureşti, 1965. 17. P.R. Halmos, Finite-Dimensional Vector Spaces, D. Van Nostrand Co.,
Princeton, 1958. 18. Howard, Elementary Linear Algebra, John Wiley & Sons, New York,
Chichester, Brisbane, Toronto, 1977. 19. M. Ikramov, Recueil de Problèmes d’Algèbre Linéaire, Ed. Mir., Moscow,
1977. 20. I.D. Ion, N. Radu, C. Niţă, D. Popescu, Probleme de algebră, Editura
Didactică şi Pedagogică, Bucureşti, 1981.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
7
21. D. Ion, N. Radu, Algebra, Editura Didactică şi Pedagogică, Bucureşti, 1981. 22. N. Jacobson, Basic Algebra, Freemann, San Francisco, 1974, 1980. 23. Kostrikin, Introduction à l’algèbre, Edition Mir., Moscow, 1977. 24. Serge Lang, Algèbra, Ed. Columbia University - New York, 1965. 25. P. Lankaster, Theory of matrics, Academic Press, New York, London, 1969. 26. E. Murgulescu, N. Donciu, Culegere de probleme de geometrie analitică şi
diferenţială, Editura Didactică şi Pedagogică, Bucureşti, 1974. 27. C. Năstăsescu, M. Ţena, C. Andrei, I. Otărăşanu, Probleme de structuri
algebrice, E.A.R.S.R., Bucureşti, 1981. 28. Hans Samelson, An Introduction to Linear Algèbra, Standford University,
Standford, California, 1974. 29. S. Sburlan, Principiile fundamentale ale matematicii moderne, Editura
Academiei Române, Bucureşti, 1991. 30. L. Schwartz, Cours Professé à l’Ecole Polytéchnique, Paris II, Hermann,
1967. 31. D. Teodorescu, Geometrie analitică şi elemente de algebră liniară, ed. a II-a,
Editura Didactică şi Pedagogică, 1972. 32. C. Udrişte, Probleme de algebră liniară, geometrie analitică şi diferenţială,
Editura Didactică şi Pedagogică, 1976. 33. C. Udrişte, C. Radu, C. Dicu, O. Mălăncioiu, Probleme de algebră, geometrie
şi ecuaţii diferenţiale, Editura Didactică şi Pedagogică, 1981.
CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
8
CAPITOLUL 1 SPAŢII VECTORIALE
Algebra liniară studiază multe obiecte matematice importante printre care şi
spaţiile vectoriale. Acest capitol este dedicat studiului general al spaţiilor şi subspaţiilor vectoriale, operaţiilor cu subspaţii vectoriale precum si al dependenţei si independenţei liniare care nu trebuie confundată cu cea funcţională.
Tehnica modernă de vârf cere stabilirea unor modele tot mai perfecţionate ale diverselor procese, ale căror legi de evoluţie se traduc în ecuaţii în spaţii vectoriale. Din aceasta cauză obiectivele urmărite au fost alegerea noţiunilor fundamentale, enunţarea corectă a rezultatelor precum şi clasificarea logică a exemplelor.
1.1 Spaţiu vectorial. Spaţii vectoriale izomorfe Una din structurile algebrice folosite în acest curs este aceea de corp
comutativ sau câmp, structură prezentată deja la orele de algebră din clasa a XII-a; cu toate acestea reamintim definiţia.
Definiţia 1.1. Fie K o mulţime înzestrată cu două operaţii: una aditivă,
cealaltă multiplicativă. Tripletul ⋅+,,K se numeşte corp comutativ (câmp) dacă satisface axiomele:
1. ⋅+,,K este inel comutativ unitar, cu 10 ≠ ; 2. Orice element nenul din K este inversabil. Exemple: ( ) ( ) ( ) ( ) NpZCRQ p ∈⋅+⋅+⋅+⋅+ ,,,,,,,,,,,, număr prim. În cele ce urmează prin K se va înţelege ( )( ⋅+,,RR - corpul numerelor reale)
sau ( )( ⋅+,,CC - corpul numerelor complexe). Spaţiul vectorial este structura algebrică ce va fi des utilizată în disciplinele
aplicate şi ea se defineşte astfel: Definiţia 1.2. Fie V o mulţime arbitrară nevidă, K un câmp şi două aplicaţii:
( ) VyxyxyxVVxV ∈∀+=→ ,,,,: ϕϕ ( ) VyKyyVVxK ∈∀∈∀⋅=→ ,,,,: αααψψ
unde ϕ este o lege de compoziţie internă numită ''adunarea vectorilor'', iar ψ este o lege de compoziţie externă numită ''înmulţirea vectorilor cu scalari''.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
9
Dacă ( )+,V este grup abelian şi legea externă verifică axiomele:
a) ( ) VxKxxx ∈∀∈∀+=+ ,,, βαβαβα
b) ( ) VyxKyxyx ∈∀∈∀+=+ ,,,, αααα
c) ( ) ( ) VxKxx ∈∀∈∀= ,,, βααββα
d) VxKxx ∈∀∈=⋅ ,1,1
atunci mulţimea V se numeşte spaţiu vectorial sau spaţiu liniar peste corpul K şi se notează KV / .
Elementele lui V se numesc vectori, elementul neutru al grupului ( )+,V numindu-se vectorul zero, notat cu V0 .
Elementele lui K se numesc scalari. Pentru ( )CRK = KV / se numeşte spaţiu vectorial real (complex). Teorema 1.1. Dacă V este un spaţiu vectorial peste K, atunci: a) VV xx 00 =⇔=α sau 0=α ; b) ( ) ( ) ( )( ) VxKxxxxx ∈∀∈∀=−−−=−=− ,,, αααααα ; c) ( ) ( ) VyxKyxyxxxx ∈∀∈∀−=−−=− ,,,,, βααααβαβα Demonstraţie:
(a) Fie 0=α şi xy ⋅= 0 ; ( )
( )( ) ( ) ( ) ( ) Vyyyyyyyyyyy
yyxxxxy0
000000
=−+=⇒⎭⎬⎫
−++=−++=+=+=⋅+⋅=+=⋅=
Deci Vx 00 =⋅ analog arătându-se că VV 00 =⋅α . Reciproc, presupunem că Vx 0=α dacă 0≠α atunci
( ) ( ) VVxxxx 001 111 ====⋅= −−− ααααα Analog pentru Vx 0≠ . (b) Din ( )( ) ( ) ( )xxxxxVV −⇒−+=−+=⋅= ααααα 00 este opusul vectorului
xα deci ( ) VxKxx ∈∀∈∀−=− ,, ααα .
Analog se arată că ( ) xx αα −=− şi atunci ( )( ) ( )( ) ( ) VxKxxxx ∈∀∈∀=−−=−−=−− ,, ααααα . (c) ( ) ( )( ) ( ) VxKxxxxxx ∈∀∈∀−=−+=−+=− ,,, βαβαβαβαβα
( ) ( )( ) ( ) VyxKyxyxyxyx ∈∀∈∀−=−+=−+=− ,,, ααααααα .
atunci dar

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
10
Exemple: 1. Orice câmp K este un spaţiu vectorial peste el însuşi.
Fie nVVV ,,, 21 K spaţii vectoriale peste K. Produsul cartezian
( ){ }niVxxxxVVV iinn ,1,,,, 2121 =∈=××× KK
este un spaţiu vectorial peste K dacă definim: ( ) ( ) ( )nnnn yxyxyxyyyxxx +++=+ ,,,,,,,,, 22112121 KKK ,
( ) ( ) KniVyxxxxxxx iiinn ∈∀=∈∀= ααααα ,,1,,,,,,,,, 2121 KK Spaţiul nVVV ××× K21 se numeşte produsul direct al spaţiilor vectoriale
nVVV ,,, 21 K .
În particular ( ){ }niKKKKK inn ,1,,,, 21 =∈=×××= αααα KK este un
spaţiu vectorial peste K, numit spaţiul vectorial aritmetic de dimensiune n. 2. Spaţiul vectorial [ ]( )RC n
ba , cu [ ] RbaNn ⊂∈ ,, al funcţiilor reale de clasă nC definite pe [ ]ba, este format din funcţiile [ ] Rbaf →,: cu derivatele de ordin n continue pe [ ]ba, . Operaţiile sunt cele obişnuite de adunare a funcţiilor şi de înmulţire a funcţiilor cu scalari. 3. Spaţiul vectorial XV , unde V este un spaţiu vectorial peste K, iar X o mulţime nevidă, { }VXffV X →= :: . Operaţiile sunt cele obişnuite de adunare a funcţiilor şi de înmulţire a funcţiilor cu scalari. 4. Spaţiul vectorial NK este spaţiul şirurilor de scalari din K, reprezentând o particularizare a exemplului de mai sus. 5. Spaţiul vectorial ( ), ;M m n K al matricilor de tip ( ),m n cu elemente din K. Operaţiile sunt cele de adunare a matricilor şi de înmulţire ale acestora cu scalari. 6. Spaţiul vectorial [ ]XKn al polinoamelor în nedeterminata X de grad cel mult n,
cu coeficienţi în K,
[ ]⎭⎬⎫
⎩⎨⎧
∈≤=== ∑=
KnpgradfXfXK i
p
i
iin αα ,:
1
Operaţiile considerate aici sunt cea de adunare al polinoamelor şi cea de înmulţire a acestora cu scalari. 7. Spaţiul vectorial al soluţiilor unui sistem liniar omogen de m ecuaţii cu n necunoscute, cu coeficienţi din K:
∑=
==n
jjij mix
1,1,0α

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
11
Definiţia 1.3. Fie V şi W două spaţii vectoriale peste câmpul K. O aplicaţie WVF →: care satisface condiţiile:
1) ( ) ( ) ( ) VyxyFxFyxF ∈∀+=+ ,,
2) ( ) ( ) VxKxFxF ∈∀∈∀= ,, ααα se numeşte transformare liniară.
Definiţia 1.4. O transformare liniară bijectivă se numeşte izomorfism de spaţii vectoriale.
Observaţia 1.1. Sunt izomorfisme:
( )( ).;1,:
;;,1:KnMKFKnMKF
n
n
→
→
1.2 Subspaţiu vectorial
Definiţia 1.5. Fie V un spaţiu vectorial peste câmpul K şi ,1 VV ⊂ 01 ≠V se numeşte subspaţiu vectorial al lui V dacă KV /1 este spaţiu vectorial în raport cu operaţiile induse pe V1 de operaţiile din V.
Teorema 1.2. O submulţime nevidă V1 a unui spaţiu vectorial V peste K este
subspaţiu vectorial al lui V dacă şi numai dacă sunt îndeplinite condiţiile: a) 11, VuVu ∈+⇒∈∀ νν b) 11, VuVuK ∈⇒∈∀∈∀ λλ Observaţia 1.2. Condiţiile a) şi b) sunt echivalente cu: c) 11,,, VuVuK ∈+⇒∈∀∈∀ μνλνμλ Consecinţa 1.1. Vectorul V0 e comun tuturor subspaţiilor vectoriale.
Exemple:
1. ( ) ( ){ }MMKnnMKnS `;,:, == - mulţimea matricilor pătratice de ordinul n simetrice. 2. ( ) ( ){ }MMKnnMMKnA ';,:, −=∈= - mulţimea matricilor pătratice de ordinul n antisimetrice.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
12
3. ( ) ( ) [ ]{ 0,;,:, ==∈= ijijs MKnnMMKnT αα pentru }njiji ,1,, => - mulţimea matricilor pătratice de ordin n superior triunghiulare. 4. ( ) ( ) [ ]{ 0,;,:, ==∈= ijiji MKnnMMKnT αα pentru }njiji ,1,, =< - mulţimea matricelor pătratice de ordin n inferior triunghiulare.
5. ( ) ( ) [ ]{ 0,;,:, ==∈= ijijMKnnMMKnD αα pentru }njiji ,1,, =≠ - mulţimea matricelor pătratice de ordin n diagonale. 1-5 Furnizează exemple de subspaţii vectoriale pentru spaţiul vectorial
( ), ; .M n n K
6. Dacă { }RRfR R →= :: este mulţimea funcţiilor reale de variabilă reală, atunci ( ) ( ) ( ){ }( ) ( ) ( ){ }
( ) ( ) ( ){ }RxxfTxfRRfRPer
RxxfxfRRfRI
RxxfxfRRfRP
r ∈∀=+→=
∈∀−=−→=
∈∀=−→=
,::
,::
,::
sunt subspaţii vectoriale ale lui RR . 7. Fiind dat V/K, atunci mulţimea { }V0 este subspaţiu al spaţiului V/K şi se numeşte subspaţiul nul. 8. V este subspaţiu al spaţiului / .V K V şi { }V0 se numesc subspaţii vectoriale improprii.
Definiţia 1.6. Fie V/K un spaţiu vectorial şi S o submulţime nevidă a sa. Un
vector Vu∈ de forma
∑=
=∈∈=n
iiiii niKSvvu
1,,1;;; λλ
se numeşte combinaţie liniară finită de elemente din S.
Teorema 1.3. Dacă S este o submulţime nevidă a lui V/K, atunci mulţimea tuturor combinaţiilor liniare finite de elemente din S este un subspaţiu vectorial al lui V.
Acest subspaţiu se numeşte subspaţiu generat de submulţimea S sau acoperirea liniară a lui S şi se notează cu L(S); mulţimea S se numeşte sistem de generatori al lui L (S).

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
13
Demonstraţie: Fie
( )
( )( ) ( )∑
∑
∑=
=
= ∈+=+⇒
⎪⎪⎭
⎪⎪⎬
⎫
∈=
∈=p
iiiin
iii
m
iii
SLuSL
SLu
1
1
1 νμλννμν
νλ
unde ( )nmp ,max= .
( ) ( ) ( )∑∑==
∈=⇒∈=∀∈∀m
iii
m
iii SLuSLuK
11, ναλανλα
Deci ( )SL este subspaţiu vectorial conform teoremei 1.2. Consecinţa 1.2. a) ( )SLS ⊂ ;
b) { }( ) { }VVL 00 = ;
c) ( )( ) ( )31
32
21 SLSSLSSLS
⊂⇒⎭⎬⎫
⊂⊂
1.3 Operaţii cu subspaţii vectoriale
Teorema 1.4. Dacă V1 şi V2 sunt două subspaţii vectoriale ale spaţiului vectorial V/K, atunci:
a) { }22112121 ,: VVVV ∈∃∈∃+==+ ννννν numită suma dintre V1 şi V2 este un subspaţiu vectorial al lui V;
b) { 121 : VVV ∈= ννI şi }2V∈ν este subspaţiu vectorial al lui V;
c) { 121 : VVV ∈= ννU sau }2V∈ν nu este subspaţiu vectorial al lui V, în general (dacă 21 VV ⊂ sau 2112 VVVV U⇒⊂ este subspaţiu vectorial).
Demonstraţie:
a) ⎩⎨⎧
+=+=
⇒∈∀+∈∀21
2121 ,,,
νννβαν
uuuKVVu
cu 111, Vu ∈ν şi 222 , Vu ∈ν .
Cum V1, V2 sunt subspaţii vectoriale ⎩⎨⎧
∈+∈+
⇒222
111
VuVu
βναβνα
.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
14
Deci: ( ) ( ) 212211 VVuuu +∈+++=+ βναβναβνα . b) ( ) 2121 ,,, VVvuKVVvu II ∈+⇒∈∈∀ βαβα .
c) Fie 2121, VVvv U∈ astfel încât ⇒⎩⎨⎧
∉∈∉∈
1222
2111
şi şi
VvVvVvVv
2121221
121 VVvvVvvVvv
U∉+⇒⎩⎨⎧
∉+∉+
⇒ .
Teorema 1.5. Fie V1 şi V2 două subspaţii vectoriale ale lui V/K şi 21 VVv +∈ .
Descompunerea 1 2v v v= + este unică dacă şi numai dacă { }1 2 0 .VV V =I
Demonstraţie: Dacă { }VV 0V 21 =I să arătăm că descompunerea este unică. Presupun că n-ar fi unică. Fie 1 2 1 2.′ ′ν = ν + ν = ν + ν Deoarece 1 1 2, ,V′ν ν ∈ şi
2 2 2, ,V′ν ν ∈ vectorul 1 1 2 2u ′ ′= ν − ν = ν − ν e conţinut şi în 1V şi în 2 ,V deci
1 2.u V V∈ I Dar { }1 2 0 ,VV V =I deci descompunerea este unică, adică
1 1 2 2 şi .′ ′ν = ν ν = ν Reciproc, dacă 21 vvv += e unică, să arătăm că { }VVV 021 =I . Într-adevăr, în caz contrar orice vector nenul 1 2w V V∈ I ar avea cel puţin
două descompuneri 2 1
0 0V Vw w w= + = + ⇒ contradicţie cu descompunerea unică,
deci { }1 2 0 .VV V =I Definiţia 1.7. Fie V1 şi V2 două subspaţii vectoriale ale lui KV / . Dacă { }1 2 0 ,VV V =I atunci 1 2V V+ se numeşte sumă directă şi se notează
21V V⊕ .
Dacă VV =⊕ 21V , atunci V1 şi V2 se numesc subspaţii suplimentare.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
15
1.4 Dependenţă şi independenţă liniară
Definiţia 1.8. Mulţimea KVS /⊂ se numeşte liniar dependentă şi se notează
SdepK , dacă există o mulţime finită de elemente distincte din S, { } 1,i i nv
= şi
scalarii { } 1,,i i n
K=
λ ⊂ nu toţi nuli, astfel încât ∑=
=n
iViiv
1
0λ .
Definiţia 1.9. Mulţimea KVS /⊂ se numeşte liniar independentă şi se
notează SindK dacă oricare ar fi mulţimea finită de elemente din S, { } 1,i i nv
= şi
scalarii { } 1,,i i n
K=
λ ⊂ astfel încât
niv i
n
iVii ,1,00
1=∀=⇒=∑
=
λλ
Consecinţa 1.3. Dacă SdepK atunci cel puţin unul dintre vectorii { } niiv ,1= este
o combinaţie liniară de ceilalţi. Demonstraţie: Presupunem 0≠iλ . Atunci, din
⇒=+++ Vnnvvv 02211 λλλ K ( )nniiiiiiiii vvvvv λλλλλλλλ 1
111
111
111 −
++−
−−−− +++++−=⇒ KK .
Consecinţa 1.4. Dacă ,kind S atunci dintre vectorii { } 1,i i n
v=
nici unul nu este o
combinaţie liniară de ceilalţi.
Consecinţa 1.5. Dacă ∑=
=n
iiivv
1λ unde { } Vvind iK ⊆ , atunci { } Knii ⊆= ,1λ este
unic determinată. Demonstraţie: Presupunem
( )∑∑∑===
=−⇒==n
iViii
n
iii
n
iii vvvv
1
'
1
'
1
0λλλλ ,
dar { } nivind iiiK ,1,' =∀=⇒ λλ .

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
16
Teorema 1.6. Fie { } 1,, / ,i Ki n
S v S V K ind S=
= ⊂ şi L(S) este acoperirea
liniară a lui S. Orice mulţime de ( )1n + elemente din ( )L S este liniar dependentă.
Demonstraţie: Fie { } ( )SLw nii ⊂= ,1 atunci 1,1,1
+==∑=
nivwn
jjjii α .
O combinaţie liniară de { } 1,1 += niiw este :
∑∑∑=
+
=
+
=
==n
jVjji
n
ii
n
iii vw
1
1
1
1
10αμμ
de unde rezultă ∑ ∑=
+
=
=⎟⎠
⎞⎜⎝
⎛n
jVj
n
ijii v
1
1
10αμ , dar SindK , deci ∑
+
=
==1
1
,1,0n
ijii njαμ , ceea
ce reprezintă un sistem de n ecuaţii cu n + 1 necunoscute. Deoarece 1,1, 1
j njii n
rang n== +
⎡ ⎤α =⎣ ⎦ atunci sistemul admite şi soluţii nenule, deci 0≠∃ iμ astfel
încât ∑+
=
=1
10
n
iiiwμ , de unde { } 1,1 += niiK wdep .
Observaţia 1.3.
a) Dacă { } ( )1, , 1, şi ,i jii n i j n
w L S rang n= =
⎡ ⎤⊂ α =⎣ ⎦ atunci { } niiK wind ,1= .
b) Dacă SindK şi { } niivS ,1== , atunci orice { } ( ) SindSLSuS Kmii ,,,1 ⊂= = are nm ≤ .
c) Dacă Kdep S conţine n vectori, atunci orice S S′ ⊃ şi conţine cel puţin
( )1n + vectori este .Kdep S′ Cazuri particulare: 1. Dacă / , / , , KS V K S V K S S dep S′ ′⊂ ⊂ ⊂ atunci 'SdepK .
2. Dacă / , / , , KS V K S V K S S ind S′ ′ ′⊂ ⊂ ⊂ atunci SindK .
3. Orice sistem KVS /⊂ ce conţine vectorul nul este SdepK .
4. Orice sistem KVS /⊂ ce conţine cel puţin doi vectori egali este SdepK . 5. Un sistem KVS /⊂ şi { }1vS = este SdepK dacă şi numai dacă Vv 01 = .
6. Un sistem KVS /⊂ şi { }1vS = este SindK dacă şi numai dacă Vv 01 ≠

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
17
7. Dacă { }21,vvS = şi 21 vv = atunci SdepK . Observaţia 1.4. Nu trebuie să se confunde dependenţa şi independenţa liniară
cu cea funcţională.
Exemplu: ( ) 0,,,,,1,2, 2122
21
2
1 ≠⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡=∈ αα
αα
αα
vuRMvu , 21 αα ≠ ;
u şi ν sunt dependenţi funcţional şi independenţi liniar. Astfel,
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡22
21
2
1
2
1
00
αα
αα
αα
, dar
⇔⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡⇔=+
00
0 22
21
22
1121 α
αλ
αα
λλλ Mvu
00
0212
2221
21211 ==⇒
⎪⎩
⎪⎨⎧
=+
=+λλ
αλαλ
αλαλ .

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
18
CAPITOLUL 2 SPAŢII VECTORIALE FINIT DIMENSIONALE
Una din justificările principale ale introducerii şi studiului spaţiilor aritmetice n-dimensionale constă în aceea că evoluţia unor sisteme fizice este strâns legată de indicarea la fiecare moment a parametrilor lor de stare, care pot fi consideraţi ca n mărimi fizice, prin urmare seturile ordonate de n parametri de stare sunt tocmai elemente ale acestor spaţii.
O altă motivaţie constă în simplificarea notaţiilor. Astfel orice funcţie ( ) n
n RARAfxxxf ⊂→ ,:,,,2,1 K de n variabile reale cu valori reale, poate fi considerată ca o funcţie f(x) de o singură variabilă vectorială ( )nxxxx ,,, 21 K= .
Acest capitol este structurat pe două subcapitole, cel de bază şi cel de coordonate şi de schimbări de coordonate.
Obiectivele urmărite sunt cele de a înţelege şi de a defini corect noţiunile de bază şi coordonate, precum şi cel de a argumenta necesitatea lucrului în raport cu baza canonică.
2.1 Baza şi dimensiunea unui spaţiu vectorial
Definiţia 2.1. Fie V un K - spaţiu vectorial, o mulţime B de vectori din V se numeşte bază a lui V dacă:
1) BInd K ; 2) ( ) VBL = Definiţia 2.2. Spaţiul vectorial V se numeşte finit dimensional dacă are o bază
finită (adică formată dintr-un număr finit de elemente) sau dacă { }VV 0= . În caz contrar se numeşte infinit dimensional.
Definiţia 2.3. Se numeşte dimensiunea unui spaţiu vectorial finit dimensional
V şi se notează Vdim , numărul { }⎩⎨⎧
==
VVn
V0 dacă ,0
n vectoricu bază o are V dacă,dim
Dacă V nu e finit dimensional spunem că are dimensiunea ∞ şi notăm ∞=Vdim .

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
19
Teorema 2.1. (Teorema înlocuirii a lui Steinitz). Dacă { }neeeB ,,, 21 K= e o bază a unui spaţiu vectorial finit dimensional
{ }( )VVV 0≠ şi { }pvvvS ,,, 21 K= este Sind K atunci:
1) np ≤ ,
2) reindexând vectorii lui B, mulţimea { }npp eevvvB ,,,,,, 121` KK += este o
bază a lui V. Demonstraţie. Prin inducţie după p. Presupun { }1,1 vSp == .
0,1,,,0,11
11 ≠∃⇒=∈=≠< ∑=
i
n
iiiiV niKevvn ααα ,
de exemplu 01 ≠α .
Atunci nn eeve1
21
21
11
1αα
αα
α−−−= K .
Deci { }neev ,,, 21 K generează V. Să arătăm că este liniar independentă.
În: Vnneev 02211 =+++ λλλ K folosim ∑=
=n
iiie
11 αν
( ) ( ) ⇒=+++++ Vnnn eee 012221111 λαλλαλλα K
nii ,1,0000,0 21111 =∀=⇒=⇒=⇒≠= λλλαλα
Deci { }neev ,,, 21 K este liniar independentă.
Presupunem adevărat pentru 1−p .
{ }121 ,,, −= pvvvS K are proprietăţile:
1) np ≤−1 ;
2) { }npp eevvvB ,,,,,, 121` KK −= e bază a lui V.
Din np <−⇒ 1)1 căci dacă 11 +=⇒=− npnp deci SdepK . Prin urmare
np <−1 şi np ≤ . Acum nnppppp eevvvv βββββ ++++++= −− KK 112211 cu cel puţin un
0≠iβ . Presupunem 0≠pβ atunci

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
20
np
np
p
pp
p
p
ppp
pp eevvvve
ββ
ββ
ββ
ββ
ββ
β−−−−−−−= +
+−
−KK 1
11
12
21
11
Deci { }npp eevvv ,,,,,, 121 KK + generează V.
Să arătăm { }nppK eevvvind ,,,,,, 121 KK + . Fie 011112211 =+++++++ ++−− nnpppppp eevvvv λλλλλλ KK
Dar ∑∑=
−
=
+=n
pkkk
p
iiip vvv ββ
1
1
. Deci
( ) ( ) ( )( ) ( ) 0111
111222111
=++++++
+++++++
+++
−−−
nnnpppppp
pppppp
eee βλβλβλ
νλβλνλβλνλβλ
K
K
Folosind ipoteza de inducţie matematică rezultă
niip
pn
pp
pp
ppp
p
p
,1,00
0
0
0
0
0
0
11
11
22
11
=∀=⇒=⇒
⎪⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪⎪
⎬
⎫
=+
=+
=
=+
=+
=+
++
−− λλ
βλ
βλ
βλ
λβλ
λβλ
λβλ
KKKKKKK
KKKKKKK
Deci { }npp eevvv ,,,,,, 121 KK + este liniar independentă şi conform procedeului
inducţiei matematice am demonstrat ceea ce trebuia.
Teorema 2.2. Fie V/K un spaţiu vectorial finit dimensional. Orice două baze ale lui V au acelaşi număr de elemente.
Demonstraţie. Fie B şi B′două baze ale lui V. Fie n numărul de elemente ale
lui B şi n′ numărul de elemente ale lui .B′ Atunci din ( ) ,L B V n n′= ⇒ ≤ iar din
( ) , deci . L B V n n n n′ ′ ′= ⇒ ≤ = Teorema 2.3. Condiţia necesară şi suficientă ca două spaţii vectoriale V/K şi
W/K finit dimensionale să aibă aceeaşi dimensiune este ca ele să fie izomorfe.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
21
Demonstraţie. Fie nWV == dimdim şi cele două baze VB şi WB . Avem izomorfismele (sisteme de coordonate)
nKVf →: şi nKW →
Cum 1g − e tot izomorfism WVfgF →= − :1 o este tot izomorfism.
Reciproc fie V şi W izomorfe: WVF →: - izomorfism. Vectorul nul din V trece în vectorul nul din W, WV 00 → .
Apoi VvvvV ∈∀=+ ,0 . ( ) ( ) ( ) ( ) ( ) WVVV FvFFvFvF 0000 =⇒+=+=
Dacă { }nV eeeB ,,, 21 K= , atunci ( ) ( ) ( ){ }nV eFeFBF ,,1 K= .
Dar ( ) ( ) niFeeeF iVnn ,1,0,02211 =∀==+++ λλλλ K adică
( ) ( ) ( ) nieFeFeF iWnn ,1,002211 =∀=⇒=+++ λλλλ K
Dacă ∑=
=∈n
iiin evKVv
1,/ λ
( ) ( ) nVdeciKWweFvFn
iii =∈==∑
=
dim,/1
λ
Consecinţa 2.1. Toate spaţiile finit dimensionale izomorfe au aceeaşi
dimensiune. Observaţia 2.1. Putem studia proprietăţile unui spaţiu /nV K studiind spaţiul
nK cu care nV e izomorf. Exemple de baze canonice. 1. Baza canonică în nK este:
( )neeeB ,,, 21 K= în care ( )1 2, , ,i i i ine a a a= K şi
( ) ( )( )⎩
⎨⎧
====≠
=1,,0,0,,1
0,,0,1,0,0,,0,1,,0 21
KK
KK
nij eji
eeadicăjiα
2. Baza canonică în ( ), ;M m n k este ( ) 1,1,
,i nijj n
B E ==
= cu
[ ] 1,1,
0, ,,
1, ,k mij kl kll n
k i l jE
k i l j==
≠ ≠⎧= α α = ⎨ = =⎩

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
22
0 0 0 00 0 0 0
1 1
0 0 0 0
j
ijE i
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟=⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
K K
K K
K K K K
K K K K K K
K K
3. Baza canonică în [ ]XKn este ( )nXXXB ,,,,1 2 K= .
2.2 Coordonate. Schimbarea coordonatelor a) Coordonate: În spaţiile vectoriale finit dimensionale se pot introduce şi
defini coordonatele. Pentru aceasta, este necesar să completăm definiţia bazei astfel:
Definiţia 2.4. Fie nV un spaţiu vectorial peste câmpul K, o mulţime
{ } KVnieB ni /,,2,1 ⊂== K se numeşte bază pentru V dacă:
1) BInd K 2) ( ) nVBL = .
Consecinţa 2.2. Orice vector nx V∈ admite o exprimare de forma ∑=
=n
iiiexx
1
în care { } BeniKx inii ∈=∀⊂= ,,1,,1 Definiţia 2.5. a) Mulţimea { } Kx nii ⊂= ,1 ordonată ( ) niix ,1= = ( )nxxx ,,, 21 K se
numeşte mulţimea coordonatelor lui x în baza B.
Notăm [ ] ( )
1
21 2
2
: .tnB
n
xx
x x x x
x
⎛ ⎞⎜ ⎟⎜ ⎟= =⎜ ⎟⎜ ⎟⎝ ⎠
KM
matricea coordonatelor vectorului x în
baza B.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
23
b) Egalitatea ∑=
=n
iiiexx
1 se numeşte relaţia de descompunere a vectorului
nx V∈ în baza B sau expresia lui x în baza B; pentru a exprima aceasta notăm
1
:n
i i Bi
x x e x=
= =∑ şi formal se poate scrie [ ] .B Bx B x=
Consecinţa 2.3. Într-o bază dată a lui / ,nV K oricărui nx V∈ îi corespunde un
singur n-uplu ordonat ( )1 2, , , nnx x x K∈K şi reciproc. Deci există o bijecţie
nnB KVf →: adică un izomorfism între spaţiile vectoriale /nV K şi nK .
Dacă vom considera ( )1 2, , , nnx x x K∈K ca fiind coordonatele unui vector
nKw∈ în baza canonică, putem scrie:
( )∑=
==n
iiiexw
10,,0,1,0,,0,0 KK
Definiţia 2.6. Izomorfismul : nB nf V K→ prin care unui vector nVν∈ îi
corespunde vectorul nw K∈ ale cărui coordonate în baza canonică a lui nK sunt tocmai coordonatele lui ν în baza dată B, se numeşte izomorfism canonic.
Definiţia 2.7. Bijecţia : nB nf V K→ definită mai sus ( )1 2, , ,
Bf
nx x x x→ K se
numeşte sistem de coordonate în nV . c) Schimbări de baze. Fie B şi B′ două baze ale lui nV atunci:
( ) ( )1 2 1 2, , , şi , , ,n nB e e e B e e e′ ′ ′ ′= =K K au acelaşi număr de vectori liniar independenţi.
Notând ( ), 1,
,tj ij i j n
e=
′⎡ ⎤ = α⎣ ⎦ avem ∑=
=⋅=n
iiijj niee
1
` ,1,α
'
1e '2e K K K '
ne
1e 11α 12α K K K n1α
2e 21α 22α K K K n2αM M M M ne 1nα 2nα K K K nnα

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
24
Astfel vom obţine matricea ( )
11 12 1
21 22 2,
n
nM B B
α α α⎛ ⎞⎜ ⎟α α α⎜ ⎟′ =⎜ ⎟⎜ ⎟α α α⎝ ⎠
K
K
M M M M
Kn1 n2 nn
numită
matricea de trecere de la baza B la baza .B′ Observaţie. Matricea de trecere de la o bază B la o bază B′ este de forma ( ) [ ] [ ] [ ]( )BnBB eeeBBM ``
2`1
`, K= , adică matricea are coloana j formată din coordonatele vectorului je′ în baza B.
Formal se poate scrie: ( ) ( ) ( )`21``
2`1 , BBMeeeeee nn KK = adică ( )`` , BBBMB =
Dacă vom considera ( )BBMBB ,``= obţinem, cu relaţia anterioară: ( ) ( ) ( )BBMBBBMBBMBB ,,, ```` ==
dar ( ) ( ) nK IBBMBBMBind =⇒ ,, `` , deci ( ) ( )`1` ,, BBMBBM −= (adică matricile de trecere de la o bază la alta sunt inverse una alteia).
Dacă ( ) ( ) ( )⇒== `````````` ,,, BBMBBBMBBMBB ( ) ( )
( )( ) ( ) ( )
⇒⎭⎬⎫=
⇒⎪⎭
⎪⎬⎫
=
=
BIndBBMBBBMBBBM
BBBMBDarBBMBBBMB
K
``````
````
`````` ,,,,
,,
( ) ( ) ( )`````` ,,, BBMBBMBBM =⇒
acestea în ipoteza că , şi B B B′ ′′ sunt baze ale aceluiaşi K - spaţiu vectorial. d) Schimbări de coordonate la schimbarea bazei.
Fie [ ] ( )nB xxxx K21= şi ( )``2
`1 nxxx K se caută legătura între [ ]Bx şi [ ] ,
Bx ′
adică
între coordonatele aceluiaşi vector x în baze diferite. Se consideră:
[ ][ ]
( )
[ ] ( )[ ]
[ ] ( )[ ] [ ] ( )[ ] .,,
,
,'1'
'
''
''
''
'''
BBBB
K
BBBB
BB
xBBMxxBBMx
BIndxBBBMxB
BBBMB
xBxx
sixBxx
−=⇔=⇒
⎭⎬⎫=
⇒⎪⎭
⎪⎬
⎫
=
==
==

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
25
CAPITOLUL 3 SPAŢII VECTORIALE EUCLIDIENE
Începem acest capitol cu studiul noţiunii fundamentale de spaţiu cu produs
scalar, care înlesneşte o extindere fascinantă şi utilă a geometriei euclidiene, permiţând să vorbim de normă şi distanţe, de unghiul dintre doi vectori n-dimensionali nenuli. Spaţiile cu produs scalar şi operatorii pe astfel de spaţii constituie obiectele matematice principale ale mecanici cuantice.
Urmărim însuşirea noţiunilor de spaţiu euclidian, spaţiu metric şi normat precum şi capacitatea de a identifica şi clasifica aceste spaţii.
3.1 Produs scalar. Spaţiu vectorial euclidian
Pe spaţiile vectoriale euclidiene vom putea introduce noţiunea de unghi şi distanţă.
Definiţia 3.1. Se numeşte produs scalar pe un spaţiu RV / o aplicaţie
RVVp →×: care are următoarele proprietăţi:
P1) ( ) Vxxxp ∈∀≥ ,0, şi ( ) 0, =xxp dacă şi numai dacă Vx 0= , P2) ( ) ( ) Vyxxypyxp ∈∀= ,,,, , P3) ( ) ( ) ( ) RVyxxyxpyxpyxxp ∈∀∈∀+=+ 212122112211 ,,,,,,,, λλλλλλ
Vom nota ( ) ( )xyyxp ,, = , iar în ( ) xyyxpR n =,: .
Consecinţe din axiome: 3.1. ( ) ( ) ( )1 1 2 2 1 1 2 2 1 2 1 2, , , , , , , , .x y y x y x y x y y Vμ +μ = μ +μ ∀μ μ ∈ ∀ ∈R 3.2. ( ) ,,,0,0)0,( Vyxyx xv ∈∀==
( ) ( ) ( ) ( ) ( ) ( ) ( ) 0y,xy,xyy,xy,0,0y,xy,xyy,x)0,x( xv =−=−==−=−= 3.3 ( ) VyVxyx 0,0, =⇒∈∀=
Dacă ( ) ( )
( ) ( ) ( )( ) ( )
( ) ⇒=
=+⇒
+=+=+⇒∈∀=
0,0,,
,,,0,,0,
yxyyyx
yyyxyyxdaryyxVxyx
( ) Vyyy 00, =⇒=⇒ 3.4 ( ) ( ) ( ) RVyxyxyxyx ∈∀∈∀== λλλλ ,,,,,,

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
26
( ) ( )yxyx ,, λλ = din p3 ( ) ( )yxyx V ,,0 λμλ =+ iar
( ) ( ) ( ) ( )yxxyxyyx ,,,, λλλλ === 3.5. Notând ( ) Rxxx ∈= 2, avem:
( ) ( ) Vyxyyxxyx ∈∀++=+ ,,,2 222 (3.1) Într-adevăr: ( ) ( ) ( ) ( ) =+++=++=+ yxyyxxyxyxyx ,,,2
( ) ( ) ( ) ( ) ( ) 22 ,2,,,, yyxxyyxyyxxx ++=+++=
Definiţia 3.2. Un spaţiu vectorial real V pe care s-a definit un produs scalar se numeşte spaţiu vectorial euclidian. Se notează cu E .
Exemple. 1. În spaţiul nR se defineşte pentru nRyx ∈∀ ,
( ) ∑=
=n
iii yxyx
1
,,
care este un produs scalar pe nR . 2. În spaţiul [ ] ( )RC ba
0, se defineşte pentru [ ] ( )RCgf ba
0,, ∈∀
( ) ( ) ( )∫=b
adxxgxfgf ,
care este produs scalar. 3. În orice spaţiu vectorial finit dimensional Vn se poate introduce un produs
scalar astfel: nVyx ∈∀ , . ( ) [ ] [ ]BB
t yxyx =, . Teorema 3.1. Într-un spaţiu RV / euclidian este satisfăcută inegalitatea
Cauchy-Schwartz: ( ) Vyxyxyx ∈∀≤ ,,, 222 (3.2)
Egalitatea are loc dacă şi numai dacă vectorii x şi y sunt { }yxdepK , .
Demonstraţie. a) Dacă 0Vx = sau ( ) 0,0 =⇒= yxy V şi 2 0x = sau 2 0,y = deci are loc
egalitatea. b) Dacă ( ) 00,0 2 ≥−⇒≠≠ yxyx VV λ deci,
( ) ( ) 0,2, 222 ≥−−=−− yyxxyxyx λλλλ .
Un trinom de gradul doi în λ este pozitiv pentru R∈∀λ dacă

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
27
( ) 0,0 222 ≤−⇔≤Δ yxyx de unde relaţia din teoremă.
c) Presupunem { }yxdepK , atunci y x= λ şi ( ) ( ) ( ) ( )( ) 222222 ,,,,, yxxxxxxxxxyx ==== λλλλ
d) Presupunem ( ) 222, yxyx = deci 0Δ = în b) ⇒ ( ) 0,2 222 =+− yyxx λλ
adică ( ) { }yxdepxyyxyxyx KV ,00, ⇒=⇒=−⇒=−− λλλλ
Definiţia 3.3. Se numeşte normă pe un spaţiu vectorial real V o funcţie RVg →: care verifică proprietăţile:
N1) ( ) Vxxg ∈∀≥ ,0 şi ( ) 0=xg dacă şi numai dacă Vx 0= ; N2) ( ) ( ) VxRxgxg ∈∀∈∀= ,, λλλ ; N3) ( ) ( ) ( ) Vxxxgxgxxg ∈∀+≤+ 212121 ,, .
Se notează ( )g x x= şi se numeşte norma lui x. Un spaţiu vectorial pe care s-a introdus o normă se numeşte spaţiu vectorial
normat. Teorema 3.2. Fie E un spaţiu euclidian. Funcţia +→⋅ RE: definită prin
( )xxx ,= este o normă pe E (norma euclidiană). Demonstraţie. 1) Din ( ) ( ) 0,,0,:)1 ≥=⇒∈∀≥ xxxExxxp şi
( ) R
def
xxx 00, =⇔= deci ( ) R
defxxxx 00, =⇔==
2) ( ) ( ) ( ) xxxxxxxx λλλλλλ ==== ,,, 2
3) ( ) ( ) ≤++=++=+ 2221
21212121 ,2, xxxxxxxxxx
( ) ( ) ≤++=++≤ 22
221
21
2221
21 ,2,2 xxxxxxxx
=+⋅+=+⋅+≤ 2221
21
22
22
21
21 22 xxxxxxxx
( ) 212
21 xxxx +=+=
Egalitatea are loc dacă şi numai dacă 12 xx λ= cu 0≥λ sau Vx 01 = .

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
28
Norma, ,x se mai numeşte şi lungimea vectorului x. Cu notaţia pentru normă acum inegalitatea Cauchy-Sehwartz devine:
( ) yxyx ≤, (3.2’`)
care pentru Rx 0≠ şi Ry 0≠ devine:
( ) 1,≤
yxyx (3.2’’)
Definiţia 3.4. Vectorul Ee∈ se numeşte vector unitate sau versor dacă
1=e .
Consecinţa 3.6. Fie RxEx 0, ≠∈ atunci x
e 1= x este un versor ( )1e = .
Deci orice Ee∈ cu Rx 0≠ se poate scrie: 1, =⋅= eexx (3.3)
În acest caz e se numeşte versorul lui x şi se notează cu 0,x astfel că:
0xxx = (3.3’)
Acum folosind (3.2”) putem da: Definiţia 3.5. Fie E un spaţiu vectorial euclidian real şi Eyx ∈, Ryx 0, ≠
Numărul real [ ]πθ ,0∈ definit de relaţia ( )
yxyx,cos =θ (3.4)
se numeşte unghiul neorientat al vectorilor x, y şi se notează cu ( )yx, .
Definiţia 3.6. Fie V un spaţiu vectorial real. Se numeşte distanţă ( metrică) pe V o aplicaţie RVVd →×: care are proprietăţile:
D1) ( ) Vyxyxd ∈∀≥ ,,0, şi ( ), 0d x y = dacă şi numai dacă yx = ; D2) ( ) ( ) Vyxxydyxd ∈∀= ,,,, ; D3) ( ) ( ) ( ) Vzyxyzdzxdyxd ∈∀+≤ ,,,,,, .
Un spaţiu vectorial înzestrat cu o distanţă se numeşte spaţiu metric.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
29
Teorema 3.3. Fie V un spaţiu vectorial dotat cu norma euclidiană. Funcţia reală definită prin
( ) Vyxyxyxd ∈∀−= ,,, ,
este o distanţă (metrică) pe V.
Demonstraţie. 1) 0 ,x y x y V− ≥ ∀ ∈ şi 0=− yx dacă şi numai dacă 0x y− = adică yx = ;
2) Vyxxyyx ∈∀−=− , ; 1) şi 2) sunt adevărate datorită definiţiei normei.
3) Vzyxyzzxyzzxyx ∈∀−+−≤−+−=− ,, (definiţia normei).
3.2 Ortogonalitate
Definiţia 3.7. Fie E un spaţiu vectorial euclidian. Doi vectori Eyx ∈, ortogonali dacă ( ), 0.x y = Se notează .x y⊥
O mulţime ES ⊂ se numeşte ortogonală dacă ( ) 0,,, =∈∀ yxSyx . O mulţime ES ⊂ se numeşte ortonormată dacă ( ) 0,, =∈∀ yxSyx şi
1== yx .
Consecinţa 3.7. Vectorul nul este ortogonal cu orice vector. Teorema 3.4. Orice mulţime ortogonală, dintr-un spaţiu vectorial euclidian
E , formată din elemente nenule este liniar independentă. Dacă nE =dim , atunci orice mulţime ortogonală care conţine n elemente din
E este o bază a spaţiului E . Demonstraţie. Fie { } { }Rnii E 0\,1 ⊂=ν să considerăm combinaţia liniară:
∑=
=n
iRii
10νλ , de unde ( )∑
=
==n
ijii nj
1,1,0,ννλ
Dar ( )⎩⎨⎧
=≠
=ji
ji
iji ,
,02ν
νν de unde:
niiii ,1,002 =∀=⇒=⋅ λνλ deci { } niiKind ,1=ν

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
30
Definiţia 3.8. Fie E un spaţiu vectorial euclidian şi REu 0,, ≠∈ νν se
numeşte proiecţia vectorului u pe v, vectorul (3.7) ( )( )
,,
u vv
v v iar numărul ( )
( ),,
u vv v
se
numeşte mărimea algebrică a proiecţiei vectorului u pe vectorul v. Definiţia 3.9. Un vector E∈ν se numeşte ortogonal mulţimii ES ⊂ dacă
este ortogonal cu orice vector din S. Mulţimea tuturor vectorilor ortogonali lui S se numeşte “S ortogonal” şi se notează cu .S⊥
Consecinţa 3.8. S⊥ este subspaţiu al lui E iar dacă S este subspaţiu al lui
⊥⇒ SE se numeşte complementul ortogonal al lui S.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
31
CAPITOLUL 4 BAZĂ ORTONORMATĂ
În spaţiile euclidiene reale sau complexe de dimensiune n există baze ortonormate. In raport cu acestea se pot determina mult mai uşor distanţele, măsurile unghiurilor şi lungimile vectorilor. Putem spune că de îndată ce este fixată o bază a unui spaţiu vectorial de dimensiune n finită, un vector x este bine determinat prin componentele vectorului relativ la baza respectivă. In acest mod vectorii abstracţi admit realizări numerice şi ''pot fi programaţi''.
Capitolul este structurat pe două subcapitole şi anume cel de bază ortonormată şi cel de construcţie a acesteia.
Ca obiective urmărite le putem preciza pe cele de înţelegerea şi aprofundarea noţiunilor de spaţii euclidiene.
4.1 Bază ortonormată
Definiţia 4.1. O bază ( ) nn EeeeB ⊂= ,,, 21 K se numeşte ortonormată dacă
( )⎩⎨⎧
≠=
==jiji
ee ijji ,0,1
, δ
ijδ se numeşte simbolul lui Kronecker.
Exemplu. În nR faţă de ( ) ∑=
=n
iii yxyx
1
, baza canonică ( )neeeB ,,, 21 K= este
ortonormată. Teorema 4.1. Fie nE un spaţiu vectorial euclidian şi ( )neeeB ,,, 21 K= o
bază ortogonală a lui.
Dacă ∑=
=n
iiiex
1
ν atunci( )( )ji
ii ee
ex
,,ν
= iar dacă B este bază ortonormată,
atunci ( ) niex ii ,1,, =∀= ν

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
32
Demonstraţie. Din ( ) ( )∑∑==
=⇒=n
ijiij
n
iii eexeex
11
,,νν cum:
( ) ( ) ( )iiiij
ji eexejie
jiee ,,
,,0
, 2 =⎪⎩
⎪⎨⎧
=
≠= ν deci
( )( )ii
ii ee
ex
,,ν
=
Dacă ( ) ijji ee δ=, , atunci ( )ii ex ,ν= . Concluzia este că într-o bază ortogonală
( )( ) i
n
i ii
i eeee∑
=
=1 ,
,νν (4.1)
iar într-o bază ortonormată
( ) i
n
ii ee∑
=
=1
,νν (4.2)
în acest caz ( )ii ex ,ν= se numesc coordonatele euclidiene ale vectorului nE∈ν .
4.2 Construcţia unei baze ortonormate pornind de la o bază dată
Teorema 4.2. În orice spaţiu euclidian de dimensiune n, nE , există baze
ortonormate. Demonstraţie. Fie ( )nfffB ,,, 21 K= o bază oarecare în nE şi ne propunem
să construim o bază ( )neeeB ,,, 21' K= ortogonală prin următoarea transformare
de bază:
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
+++++=
++=+=
=
−− nnnnnnnn eeeeef
eeefeef
ef
11332211
32231133
21122
11
αααα
ααα
K
KKKKKKKKKKK
În acest caz putem scrie că:

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
33
( )
⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
−
1 0 0 0
0
1 00 10
1
,
1
3
223
11312
'
K
KMMM
MKMMM
MKMM
K
K
K
nn
n
n
n
BBM
α
αααααα
Cum vectorii ie se construiesc prin inducţie ca să îndeplinească ( ) jiee ji ≠= ,0, , obţinem:
( )( )( )( )
( )( )
( )( )
( )( )
( )( )
( )( )
( )( )
( )( )⎪
⎪⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪⎪⎪
⎨
⎧
++++=
+++=
++=
+=
=
−−−
−nn
nn
nnnnn ee
eeef
eeeef
eeeef
f
eeeeef
eeeef
eeeef
f
eeeeef
eeeef
f
eeeeeff
ef
111
12
22
21
11
1
4333
342
22
241
11
144
3222
231
11
133
2111
122
11
,,
,,
,,
,,
,,
,,
,,
,,,,
K
KKKKKKKKKKK
Deci:
( )( )( )( )
( )( )
( )( )
( )( )
( )( )
( )( )
( )( )
( )( )⎪
⎪⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪⎪⎪
⎨
⎧
−−−−=
−−−=
−−=
−=
=
−−−
−1
11
12
22
21
11
1
333
342
22
241
11
1444
222
231
11
1333
111
1222
11
,,
,,
,,
,,
,,
,,
,,
,,,,
nnn
nnnnnn e
eeef
eeeef
eeeef
fe
eeeef
eeeefe
eeeffe
eeeef
eeeef
fe
eeeef
fe
fe
K
KKKKKKKKKKK

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
34
Vom norma acum baza ( )neeeB ,,, 21' K= făcând în plus transformarea:
( )ni
eee
ee
eii
i
i
ii ,1,
,* =∀==
Noua bază ( )**2
*1
'' ,,, neeeB K= fiind ortonormată este cea căutată. Observaţie. Bazele ortonormate simplifică mult calculul: astfel, dacă ( )neeeB ,,, 21 K= este o bază ortonormată în spaţiul nE şi
∑ ∑= =
==n
i
n
iiiii eyyexx
1 1, , atunci:
( ) ( ) ( ) ( )∑∑∑===
−===n
iii
n
iii
n
ii yxyxdyxyxxx
1
2
11
2 ,,,,, .
CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
35
CAPITOLUL 5 TRANSFORMĂRI LINIARE
Algebra liniară constituie cadrul matematic abstract pentru tratarea problemelor ''liniare'' (care conduc la ecuaţii şi sisteme de gradul întâi) din diverse domenii. Alături de noţiunea de spaţiu vectorial, un concept de bază îl constituie cel de aplicaţie liniară sau, cum se mai spune, operator liniar, ca ''purtător de informaţie liniară'' de la un spaţiu vectorial la altul.
Structurarea capitolului este făcută pe patru subcapitole şi anume cel legat de definiţii şi proprietăţi generale apoi cel dedicat operaţiilor cu transformări liniare, ca în final să ne ocupăm de nucleul şi imaginea unei transformări liniare.
Obiectivele pe care le-am urmărit au fost acelea de a familiariza studentul cu noţiunile noi legate de transformări liniare, de a-l obişnui pe acesta să stabilească natura unei aplicaţii folosind demonstraţiile cele mai simple dar corecte precum şi a-i dezvolta puterea de analiză a fenomenelor legate de acestea.
5.1 Definiţie. Proprietăţi generale
Definiţia 5.1. Fie U şi V două K-spaţii vectoriale. O funcţie VUF →: cu proprietatea
( ) ( ) ( ) UyxKyFxFyxF ∈∀∈∀+=+ ,,,, βαβαβα (5.1)
se numeşte transformare liniară (operator liniar sau morfism) de la U la V. Mulţimea morfismelor de la U la V se notează cu sau ( )VUHom , .
Vectorul ( ) VxF ∈ pentru x U∈ se numeşte imaginea vectorului x prin F, iar
Ux∈ a cărui imagine este se numeşte preimagine a lui ( )xF . Cazuri particulare.
1. Un morfism injectiv VUF →: se numeşte monomorfism. 2. Un morfism surjectiv VUF →: se numeşte epimorfism. 3. Un morfism bijectiv VUF →: se numeşte izomorfism. În acest caz există şi
UVF →− :1 tot izomorfism. 4. Un morfism UUF →: se numeşte endomorfism. 5. Un morfism KUF →: se numeşte formă liniară. 6. Un morfism bijectiv UUF →: se numeşte automorfism.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
36
Exemple: 1. Produsul scalar a doi vectori din ,nE dacă fixăm unul din vectori, este o
formă liniară. 2. În [ ] ( ) ( ) ( ) ( )∫=
b
aba dxxgxfgfRC ,:0, cu ( )f x fixat este o formă liniară.
Teorema 5.1. Dacă atunci: 1. ( ) VUF 00 = .
2. Dacă U1 este subspaţiu vectorial al lui U, atunci ( )1UF este subspaţiu
vectorial al lui V. 3. Dacă { } niiuS ,1== este Kdep S atunci:
( ) ( ){ } niiuFSF ,1== este ( )SFdepk .
Demonstraţie: 1. În definiţia (5.1.) facem ( ) ( )xFxF ααβ =⇒= 0 şi pentru ⇒= 0α
( ) VUF 00 =⇒ .
2. U1 - subspaţiu vectorial al lui U atunci: K∈∀ βα , şi 11, UyxUyx ∈+⇒∈∀ βα deci
( ) ( ) ( ) ( )1UFyFxFyxF ∈+=+ βαβα . 3. { } UuS nii ⊂= = ,1 şi Kdep S , deci
0 a.i. ,101
≠=∃⇒=∑=
i
n
iUii niu λλ .
Aplicând F putem scrie:
( ) ( ) 0 a.i. ,10011
≠=∃⇒=⇒=⎟⎠
⎞⎜⎝
⎛ ∑∑==
i
n
iViiU
n
iii niuFFuF λλλ , deci ( )SFdepK .
Teorema 5.2. Fie Un şi V două K-spaţii vectoriale, B o bază în nU ,
( )neeeB ,,, 21 K= iar { } nii ,1=ν n vectori arbitrari în V, atunci: 1. Există şi este unică cu proprietatea:
( ) nieF ii ,1, ==ν .

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
37
2. Dacă { } niiKind ,1=ν atunci cu proprietatea ( ) nieF ii ,1, =∀=ν
este monomorfism.
Demonstraţie: 1. Existenţa: Fie ,nx U∈ atunci
[ ]Bn
i
formal
iiB xBexxx ∑=
===1
.
Regula ( ) ∑=
=→n
iiixxFx
1ν defineşte o funcţie VUF n →: cu proprietatea
( ) nieF ii ,1, ==ν asta din ( ) ( )∑=
=n
iii eFxxF
1 sau formal
( ) ( ) ( ) ( )( )[ ]Bn xeFeFeFxF K21= , iar dacă notăm ( ) ( ) ( )( ) ( )BFeFeFeF n =K21 atunci ( ) ( )[ ]BxBFxF = .
Unicitatea: Demonstrăm prin reducere la absurd. Presupunem că mai există cu proprietatea
atunci de unde 2. Pentru nUyx ∈∀ , şi ( ) ( )⇒= yFxF
( )[ ] ( )[ ] ( ) [ ] [ ]( ) VBBBB yxBFyBFxBF 0=−⇒=
dar ( ) [ ] [ ] [ ] [ ] yxyBxByxBFind BBBBK =⇒=⇒=⇒ deci F e monomorfism.
Teorema 5.3. Dacă este monomorfism, atunci au loc: 1. Dacă { } ( ) ( ){ } niiKnii uFSFSinduS ,1,1 , == =⇒= este ( )SFind K . 2.Dacă { } niieB ,1== este bază a lui U, atunci ( )BF este ( )BFind K . 3. Dacă nVU == dimdim şi B este bază a lui U, atunci ( )BF este bază a lui
V. Demonstraţie:
1. ;0,,10:1
==∀⇒=∑=
iUi
n
iiK niuSind λλ F monomorfism şi
( ) ViUi uFu 00 ≠⇒≠ , iar pentru ( ) ( )jiji uFuFjiuu ≠⇒≠∀≠ , .

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
38
Deci ( ) ( ) 0,,1,0011
==∀=⇒=⎟⎠
⎞⎜⎝
⎛ ∑∑==
i
n
iViiU
n
iii niuFFuF λλλ . Acum 2. şi 3.
rezultă din 1.
5.2 Operaţii cu transformări liniare
Definiţia 5.2. Fie mulţimea tuturor transformărilor liniare de la U la V, adică:
( ) ( ) ( ) ( ){ }, : , , , , .U V U V x y x y K x y U= → α +β = α +β ∀α β∈ ∀ ∈L F F F F În această mulţime definim:
1. egalitatea : = 2. adunarea
3. înmulţirea cu scalari
Proprietăţi: 1. Transformarea liniară 0 :U V→ cu proprietatea ( ) Uxx V ∈∀= ,00 este
transformarea nulă. 2. Transformarea VUF →:' cu proprietatea ( ) ( ) UxxFxF ∈∀−= ,' unde
se numeşte opusa transformării 3. formează grup comutativ faţă de adunarea definită mai sus ţinând
seama de 1. şi 2. 4. împreună cu operaţiile 2. şi 3. definite la (5.2) formează un spaţiu
vectorial peste K. Cazuri particulare. se numeşte spaţiul endomorfismelor lui V. - mulţimea formelor liniare de la V la K se numeşte dualul lui V. Definiţia 5.3. Fie şi atunci
se numeşte compunerea sau produsul transformărilor liniare şi se notează:
→

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
39
Proprietăţi: 1. Produsul a două transformări liniare este o transformare liniară:
2. Produsul transformărilor liniare este asociativ şi în general nu e comutativ. 3. Produsul transformărilor liniare este distributiv la stânga în raport cu
adunarea transformărilor liniare. Dacă şi atunci
4. Produsul este distributiv şi la dreapta în raport cu adunarea. Dacă
şi atunci
5. În mulţimea ( ),U UL a endomorfismelor introducem transformarea
identică: ( ) UxxxJUUJ ∈∀=→ ,,: . Astfel ( ),U UL se transformă în inel în raport cu adunarea şi înmulţirea transformărilor liniare.
Dacă este mulţimea automorfismelor, adică cu proprietatea atunci
este corp. 6. În mulţimea ( ),U UL a endomorfismelor introducem puterile naturale ale
unei transformări astfel:
5.3 Nucleul şi imaginea unei transformări liniare
Definiţia 5.4. (1) Fie se numeşte nucleul transformării liniare mulţimea preimaginilor vectorului V0 adică:
( ){ } ( ) KerFFuFUu VV ===∈ − :00 1
(2) Se numeşte imaginea transformării liniare F , mulţimea imaginilor lui Uu∈ , adică:
( ){ } ( ) FuFuFUuV Im:, ===∈∃∈ νν
=

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
40
Teorema 5.4. Fie atunci: 1) KerF este un subspaţiu vectorial al lui U; 2) FIm este subspaţiu vectorial al lui lui V. Demonstraţie. 1) ( ) VuFKKerFuu 0,,, 121 =⇒∈∀∈∀ βα şi ( ) VuF 02 = . Deci ( ) ( ) ( ) KerFuuuuFuFuF VV ∈+⇒=+⇔=+ 212121 00 βαβαβα . 2) UuuKF ∈∃⇒∈∀∈∀ 2121 ,,,Im, βανν a. î. ( ) 11 ν=uF şi ( ) 22 ν=uF . Deci ( ) ( ) ( ) VuuFuFuF ∈+=+⇔+=+ 2121211 2 βνανβαβνανβα adică
FIm21 ∈+ βναν . Teorema 5.5. Dacă atunci FIm este finit dimensional şi:
nUFKerF dimImdimdim ==+ .
Dimensiunea nucleului se numeşte defectul lui ,F iar dimensiunea imaginii se numeşte rangul transformării F.
Demonstraţie. Fie dim şi dim .nU n Ker p= =F Dacă 0,p = atunci
{ }UKerF 0= , adică ( )nn UFUF →: este un izomorfism. Ori două spaţii izomorfe au aceeaşi dimensiune, deci ( ) nFUF n == Imdimdim şi 0n n= + ,
adică relaţia din teoremă este adevărată pentru 0.p =
Dacă 1,p ≥ iar { }peeeB ,,, 21 K= este o bază pentru KerF pe care o
completăm până la o bază a spaţiului { }1 2 1, , , , , , ,n p p nU B e e e e e+′ = K K să
considerăm nx U∈ atunci 1
.n
i ii
x x e=
= ∑
Aplicând F şi ţinând seama de faptul că B este bază în KerF obţinem: ( ) ( ) ( ) ( ) FxFeFxeFxxF nnpp Im,11 ∈++= ++ K .
Deci ( ) ( ){ }np eFeF ,,1 K+ este un sistem de generatori pentru spaţiul FIm .Să arătăm că acest sistem de vectori este şi liniar independent.
Dacă am presupune că este un sistem de vectori liniar dependent, deci ar
exista cel puţin un coeficient nenul, de exemplu 1p+α din relaţia ( ) ( ) ( ) ( )VnnppVnnp eeFeFepF =++⇔=+++ +++ αααα KK 111 01
ar rezulta că:

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
41
KerFee nnpp ∈++⋅ ++ αα K11 . Cum în { }peeeBKerF ,,,, 21 K= e bază rezultă:
ppnnpp eeeee ααααα +++=++++ KK 221111 cu 01 ≠+pα , deci npp eeeee ,,,,,, 121 KK + sunt liniar dependenţi. Contradicţie cu
{ }npp eeeeeB ,,,,,, 121' KK += - bază.
Deci ( ) ( ){ }np eFeF ,,1 K+ este un sistem de vectori liniar independent, formând chiar bază în FIm .
Prin urmare KerFUF n dimdimImdim −= .

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
42
CAPITOLUL 6 REPREZENTAREA ANALITICĂ A UNEI TRANSFORMĂRI
LINIARE. VECTORI ŞI VALORI PROPRII
Acest capitol reprezintă un dicţionar perfect, privind corespondenţa între aplicaţii liniare şi matrici. Vom studia cum se schimbă matricea asociată unei aplicaţii liniare când se schimbă bazele şi cum se pot determina vectorii şi valorile proprii corespunzătoare acesteia.
Capitolul cuprinde trei subcapitole dedicate reprezentării analitice, vectorilor proprii şi valorilor proprii asociate unei transformări liniare.
Obiectivele urmărite au fost cele legate de înţelegerea şi însuşirea noilor noţiuni, precum şi cel legat de dezvoltarea capacităţii de lucru, folosind cele mai eficiente metode numerice.
6.1 Reprezentarea analitică a unei transformări liniare. Matricea transformării
Teorema 6.1. Fie o bază a lui ,nU şi
( )pVB ννν ,,, 21 K= o bază a lui pV atunci:
(1) există şi este unică o matrice ( ) ( )KnpMBBFM VU ,,,, ∈ astfel încât ( ) ( )VUVU BBFMBBF ,,= (6.1)
(2) pentru nUx∈∀ ( )[ ] ( )[ ]
UV BVUB xBBFMxF ,,= (6.2)
Demonstraţie. (1) Existenţa: pentru ⇒∈∀ nUx ( ) ( ) ( )[ ]
VBVp xFBxFVxF =⇒∈ de unde
( ) ( )[ ] njujFBuFVBVj ,1, ==
astfel: ( ) ( ) ( ) ( ) ( )( )
( )[ ] ( )[ ] ( )[ ]( )( )[ ] ( )[ ]( )
VV
VVV
BnBV
BnVBVBV
nnU
uFuFB
uFBuFBuFBuFuFuFuuuFBF
,,
,,, ,,,,,,
1
21
2121
K
K
KK
=
=====

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
43
Notând cu
( ) ( )[ ] ( )[ ]( )VV BnBVU uFuFBBFM ,,,, 1 K= (6.3)
matricea celulară ale cărei coloane sunt coloanele coordonatelor vectorilor ( ) niuF i ,1, =∀ în baza VB putem scrie că:
( ) ( )VUVU BBFMBBF ,,= . Deci am demonstrat că există matricea ( )VU BBFM ,, numită matricea
transformării liniare F corespunzătoare bazelor , ;U VB B ea are n coloane, iar fiecare coloană are p linii, deci ( ) ( ); , , ; .U VM B B M p n K∈F
Unicitatea: Prin reducere la absurd, presupunem că există şi ( )VU BBFM ,,1 astfel încât ( ) ( )VUVU BBFMBBF ,,1= deci:
( ) ( )( ) ( )[ ]
( ) ( )VUVU
nVUVUV
VUVVUV
BBFMBBFMBBFMBBFMBBBFMBBBFMB
,,,,0,,,,
,,,,
1
,11
1
=⇒
=−⇒⇒=⋅
aceasta rezultând din VK Bind . (2) [ ]
UBUn xBxUx =⇒∈∀ aplicând ( ) ( )[ ] ( )[ ]
UU BVUVBU xBBFMBxBFxFF ,,==⇒ Adică:
( ) ( )[ ]UBVUV xBBFMBxF ,,= (6.4)
(6.4) este numită expresia transformării liniare F în baza .VB Ţinând seama şi de ( ) ( )[ ]
VBV xFBxF = din (6.4) rezultă că: ( )[ ] ( )[ ]
UV BVUB xBBFMxF ,,= Caz particular. (1) În cazul unui endomorfism fie ( )nuuuB ,,, 21 K= o bază a lui .nU Atunci ( ) ni UuF ∈ deci ( ) ( )[ ]Bii uFBuF = .
În acest caz: ( ) ( ) ( ) ( )( )
( )[ ] ( )[ ] ( )[ ]( )( )[ ] ( )[ ] ( )[ ]( ).,,,
,,, ,,,
21
21
21
BnBB
BnBB
n
uFuFuFBuFBuFBuFB
uFuFuFBF
K
K
K
=
====
Matricea ( )[ ] ( )[ ] ( )[ ]( ) ( )BFMuFuFuF BnBB ,:,,, 21 =K este o matrice celulară având n coloane, iar fiecare coloană este matricea coloană a coordonatelor vectorului ( )iuF în baza { }niB ,,2,1, K∈ , deci ( ) ( ); , ; .M B M n n K∈F

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
44
Dacă ( ) ( ) ( ) ( )( )nuFuFuFBBFM ,,,0,det 21' K=⇒≠ este o bază a lui ,nU iar
( );M B′ ′F este tocmai matricea de trecere de la baza B la baza B′ şi putem scrie ( ) ( )BFMBBF ,⋅= .
Teorema 6.2. Fie două endomorfisme şi ,B B′ două baze
în .nU Matricele ( ) ( ); şi M B M′ ′F F;B reprezintă aceeaşi transformare liniară
dacă şi numai dacă ( ) ( ) ( ) ( )1; , ,M B M B B M M B B−′ ′ ′ ′=F F;B , în care ( )', BBM este matricea de trecere de la baza B la .B′
Demonstraţie. Dacă şi aplicând obţinem:
( ) ( ) ( ) ( ) ( ) ( ), ; ; ,B B M B B B M B BM B M B B′ ′ ′ ′= ⇔ = ⇔F F F F
( ) ( ) ( ) ( )1; , ; , ,B M B B M B B M B M B B−′ ′ ′ ′ ′=F F
ţinând seama de ( ) ( ) ( ) ( )1; , ; , .Kind B M B M B B M B M B B−′ ′ ′ ′⇒ =F F Reciproc, presupunând că are loc relaţia:
( ) ( ) ( ) ( )1; , ; , ,M B M B B M B M B B−′ ′ ′=F F
rezultă imediat, parcurgând demonstraţia anterioară în sens invers, că .'FF =
6.2 Vectori proprii
Definiţia 6.1. Fie un endomorfism. Un vector { }UnUx 0\∈ ,
se numeşte vector propriu al endomorfismului F dacă există Kx ∈λ astfel încât: ( ) xxF x ⋅= λ (6.5)
xλ se numeşte valoarea proprie a endomorfismului F corespunzătoare lui x.
Mulţimea tuturor valorilor proprii ale endomorfismului F se numeşte spectrul lui F .
Notând ( ) nnn UxxxIUUI ∈∀=→ ,,: , atunci (6.5) devine: ( )( ) { }unU UxxIF 0\,0 ∈∀=− λ ,
ceea ce arată că ( )IFKerx λ−∈ .
Proprietate. Dacă ( ) xxF xλ= , atunci ( ) { }0\, KkkxkxF x ∈∀= λ .

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
45
Teorema 6.3. (1) Unui vector propriu al endomorfismului F îi corespunde o singură valoare proprie.
(2) Vectorii proprii corespunzători la valori proprii distincte sunt liniari independenţi.
(3) Mulţimea ( ) ( ){ },S x x x fixatλ = = λ λ −F este un subspaţiu vectorial al lui U, numit subspaţiu propriu.
(4) Subspaţiile proprii corespunzătoare la valori proprii distincte sunt disjuncte.
Demonstraţie. (1) Prin reducere la absurd: presupun că ( ) uuF 1λ= şi
( ) uuF 2λ= cu 21 λλ ≠ atunci din ( ) 0021 =⇒=− uu Uλλ , contradicţie cu
definiţia (6.1.), deci 21 λλ = . (2) Fie pλλλ ,,, 21 K valori proprii distincte şi ( ) pixxF iii ,1, =∀= λ . Să
demonstrăm { } piiK xind ,1= prin inducţie după p.
Dacă ( ) { }UUxxxFp 0\,1 1111 ∈⇒== λ , deci Ux 01 ≠ e liniar independent. Presupunem că vectorii 121 ,,, −pxxx K corespunzători valorilor proprii
distincte 121 ,,, −pλλλ K sunt liniar independenţi. Să considerăm:
U
p
iii x 0
1=∑
=
α (6.6)
de unde
U
p
iii xF 0
1=⎟⎟
⎠
⎞⎜⎜⎝
⎛∑=
α (6.7)
sau
U
p
iiii x 0
1=∑
=
αλ (6.8)
Acum, din (6.6), pλ - (6.8) obţinem U
p
iiii
p
iiip xx 0
11=−⋅ ∑∑
==
αλαλ adică
( ) ( ) U
p
ippppiipi xx 0
1
1=−+−∑
−
=
λλαλλα
de unde, ţinând seama de { } 1, −= piiiK xind ,
( ) 0, cu 0, 1, 1 deci 0, 1, 1.i p i p i ii p i p⇒α λ −λ = λ − λ ≠ ∀ = − α = ∀ = −

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
46
Astfel (6.6) devine 0=pp xα dar
{ } piUx ipUp ,1,000\ =∀=⇒=⇒∈ αα ceea ce trebuia demonstrat.
(3) ( )λSyx ∈∀ , şi ( )( )
( ) ( ) ( )yxyFxFyyF
xxFK βαλβα
βλ
αλβα +=+⇒
⎪⎩
⎪⎨⎧
⋅=
⋅=∈∀ :,
şi ( ) ( ) ( ) ( )yxyxyFxFyxF βαλβλαλβαβα +=+=+=+ , deci ( )λβα Syx ∈+ .
(4) Fie 21 λλ ≠ . Pentru ( ) ( ) ( ) ( )( ) ( ) ⇒
⎩⎨⎧
=⇒∈=⇒∈
⇒∈xxFSxxxFSx
SSx22
1121 λλ
λλλλ I
( ) ( ) ( )1 2 1 21 2
1 2
00 deci şi sunt disjuncte. U
U
x x xx S S
⎫λ = λ ⇒ λ − λ = ⎪⇒ = λ λ⎬λ ≠ λ ⎪⎭
Teorema 6.4. Condiţia necesară şi suficientă ca matricea ( ); BM F a
endomorfismului să fie diagonală este ca vectorii bazei să fie vectori proprii ai acestei transformări.
Demonstraţie. Presupunem că ( ) nkeeF kkk ,1, == λ şi ( )nU eeeB .,, 21 K= ,
atunci: ( ) ( ) ( ) ( )( )1 2 nB B B
M e e e= =⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦ ⎣ ⎦KF;B F F F
( )knD
n
,
0 0
0000000
2
1
∈
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
=
λ
λλ
MMM
K
M
K
Reciproc presupunem că ( ) ( )knDBFM ,, ∈ , atunci:
( ) =
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
n
neee
λ
λλ
0 0
0000000
,,,2
1
21
MMM
K
M
K
K
( )nneee λλλ K2211= adică ( ) nkeeF kkk ,1, =∀= λ

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
47
6.3 Polinom caracteristic
Să considerăm [ ]BxBx = atunci folosind (6.4), relaţia (6.5) devine: ( )[ ] [ ]BB xBxBFBM λ=,
de unde folosind Bind K rezultă: ( )[ ] [ ]BB xxBFM λ=,
sau, dacă notăm cu ( ), ;nI M n n K∈ matricea unitate, atunci obţinem ecuaţia:
( )( )[ ] ( ),1;0n M n KBM I x− λ =F;B
care se numeşte ecuaţia vectorilor proprii. Această ecuaţie dă coordonatele vectorului propriu Bx cunoscând valorile proprii .λ Notând:
( ) ( ) ( ) ( )( )1 2 , 1,n ijB B B i j nM e e e
=⎡ ⎤= = α⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦KF;B F F F
ecuaţia anterioară se poate scrie:
( )KnM
nnnnn
n
n
O
x
xx
,1,2
1
21
22221
11211
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⋅
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−−
M
K
MMMM
K
K
λααα
αλααααλα
care este un sistem omogen, iar soluţia banală nu convine problemei, deoarece un vector propriu { }UUx 0\∈ şi atunci notăm ( )( ) ( )λλ PIBFM n =− :,det şi numim polinomul ( )P λ polinom caracteristic. Evident ( ) ngradP =λ , iar ecuaţia
( )( )det ; 0nM B I− λ =F se numeşte ecuaţia caracteristică. Rădăcinile polinomului caracteristic sunt valorile proprii ale endomorfismului .F
Teorema 6.5. Polinomul caracteristic al unui endomorfism este un invariant la schimbarea bazei.
Demonstraţie. Fie ,B B′ două baze în nU şi ( ) ( )',,, BFMBFM matricele
transformării liniare corespunzătoare endomorfismului. Să arătăm că:
( )( ) ( )( )nn IBFMIBFM λλ −=− ,det,(det '

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
48
( )( ) ( ) ( ) ( ) ( ) ( )( )( ) ( )( ) ( )[ ]( ) ( )( ) ( )
( ) ( ) ( )( )
( )( ).,det
,det,det,det
1
,det,det,det
,,,det
,,,,,det,(det
''
''1
''1
''1''1'
n
n
n
n
nn
IBFM
IBFMBBMBBM
BBMIBFMBBM
BBMIBFMBBM
BBMBBMIBBMBFMBBMIBFM
λ
λ
λ
λ
λλ
−=
=−⋅=
=⋅−⋅=
=−=
=−=−
−
−
−−
Teorema 6.6. Dacă matricea endomorfismului F în baza B, ( )BFM , este reală şi simetrică, atunci valorile proprii sunt reale. (Ecuaţia caracteristică are toate soluţiile reale).
Demonstraţie. Considerăm:
( )[ ] [ ]BB xxBFM λ=, (6.9) conjugând complex obţinem: ( )[ ] [ ]BB xxBFM λ=, (6.10) deoarece ( ) ( )BFMBFM ,, = .
Înmulţind la stânga (6.9) cu [ ]Bt x şi tot la stânga pe (6.10) cu [ ]Bt x obţinem: [ ] ( )[ ] [ ] [ ]BB
tBB
t xxxBFMx λ=, [ ] ( )[ ] [ ] [ ]BB
tBB
t xxxBFMx λ=, aplicând transpusa celei de-a doua relaţii obţinem:
[ ] ( )[ ] [ ] [ ]BBt
BBt xxxBFMx λ=,
care comparată cu prima dă: ( ) [ ] [ ] 0=⋅− B
txxλλ
dar [ ] [ ] Rxx BBt ∈⇒=⇒≠ λλλ0 .

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
49
CAPITOLUL 7 TRANSFORMĂRI LINIARE PE SPAŢII EUCLIDIENE
În cadrul analizei funcţionale sunt caracterizate funcţionalele liniare (şi continue) pe spaţii înzestrate cu diverse structuri, din această cauză este absolut necesară cunoaşterea în primul rând a transformărilor liniare pe spaţii euclidiene.
Capitolul este dedicat studiului transformărilor liniare simetrice, apoi celor ortogonale translaţiilor şi izometriilor.
Obiectivele urmărite au fost înţelegerea şi însuşirea fenomenelor care se produc în spaţiile euclidiene relativ la transformările liniare.
7.1 Transformări liniare simetrice
Definiţia 7.1. Un endomorfism se numeşte simetric dacă verifică egalitatea
Teorema 7.1. Condiţia necesară şi suficientă ca endomorfismul
să fie simetric este ca ( ) ( )knSBFM ,, ∈ într-o bază ortonormată. Demonstraţie. Dacă nUu ∈ν, , iar ( )neeeB ,,, 21 K= e baza ortonormată,
atunci ∑∑==
==n
jjj
n
iii eeuu
11
, νν , deci:
( ) ( )∑∑∑∑= ===
=⎟⎟⎠
⎞⎜⎜⎝
⎛=
n
i
n
jjiji
n
jjj
n
iii eeueeuu
1 111,,,, ννν
dar ( ) ijji ee δ=, , deci:
( ) [ ] [ ] [ ] [ ]BBt
BBt
n
iii uuuu νννν === ∑
=1,
sau ceea ce se mai poate scrie: [ ] [ ]( ) [ ] [ ] [ ] [ ]BB
tBB
tBB uuBuB ννν ==,
Deci ( )( ) [ ] ( )[ ]( ) [ ] ( )[ ]BBt
BB BFMuBFBMuBFu ννν ,,,, == , ( )( ) ( )[ ] [ ]( ) [ ] ( )[ ]Bt
Bt
BB BFMuBuBFBMuF ννν ,,,, == Dacă F este simetrică, din ultimele relaţii rezultă ( )BFMBMF t ,, = , deci ( ) ( )knSBFM ,, ∈ .
(7.1)
n

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
50
Reciproc: Presupunând că ( ) ( ); ,M B S n K∈F atunci nUu ∈∀ ν, :
[ ] ( )[ ] [ ] ( )[ ] ( )[ ]( )[ ]BBt
Bt
Bt
BBt uBFMBFMuBFMu ννν ,,, ==
deci [ ] ( )[ ]( ) ( )[ ] [ ]( )BBBB BuBFBMBFBMuB νν ,,,, = , adică: ( )( ) ( )( )νν ,, uFFu = .
7.2 Transformări ortogonale
Definiţia 7.2. Transformarea liniară se numeşte ortogonală dacă ea conservă produsul scalar, adică:
( ) ( )( ) ( ) nEyxyxyFxF ∈∀= ,,,, Notăm cu Teorema 7.2. Condiţia necesară şi suficientă ca o transformare liniară să fie ortogonală este ca ea să conserve norma vectorilor, adică:
( ) nExxxF ∈∀= , (7.2) Demonstraţie. Presupunem F ortogonală, atunci din definiţie:
( ) ( )( ) ( ) ( ) xxFxxxFxF =⇒= ,,
Reciproc: presupunând că ( ) nExxxF ∈∀= , , atunci:
( ) ( )[ ] [ ]( ) ( ) ( )[ ]( ) ( )( ) ( ) ( )( )[ ] ( ) ( )( )yFxFyFxFyFxF
yFxFyxF
yxyxyxyxyx
,21
21
21
21,
22
222
222222
=−−+=
=−−+=
=−−+=−−+=
Consecinţe: 1. Nucleul unei transformări ortogonale conţine numai vectorul nul. 2. Transformarea ortogonală este injectivă. 3. O transformare ortogonală este bijectivă dacă şi numai dacă este surjectivă.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
51
Teorema 7.3. 1) Produsul a două transformări ortogonale este o transformare ortogonală.
2) Inversa unei transformări ortogonale surjective este o transformare ortogonală.
Demonstraţie.
1) Fie şi ortogonale atunci: ( )( ) ( ) nExxxFxFF ∈∀== ,112
2) Fie ortogonală surjectivă, atunci ea este bijectivă şi există deci np EEF →− :1 şi ( ) xyFEy p =∈∀ −1 , deci:
( ) ( ) yxFxyF ===−1 Consecinţă. Mulţimea endomorfismelor ortogonale surjective formează grup
în raport cu înmulţirea. Teorema 7.4. Condiţia necesară şi suficientă ca să fie
ortogonală este ca matricea ( )',, BBFM a transformării în raport cu orice baze ortonormate ,B B′ din nE respectiv din pE să verifice egalitatea:
( ) ( ) nt IBBFMBBFM ='' ,,,,
Demonstraţie. Presupun că ortogonală, deci: Pentru nEx∈ , ( ) xxF = , adică ( ) ( )( ) ( ) [ ] [ ]BB
t xxxxxFxF == ,, , iar
( ) ( )( ) ( )[ ] ( )[ ] '', BBt xFxFxFxF ⋅= de unde ( )[ ] ( )[ ] [ ] [ ]BB
tBB
t xxxFxF =⋅ '' .
Dar ( )[ ] ( ) [ ]BBB xBBFMxF ⋅= ',,' care înlocuită mai sus: [ ] ( ) ( )[ ] [ ] [ ]BB
tB
tB
t xxxBBFMBBFMx =⋅ '' ,,,,' , de unde ceea ce trebuia demonstrat şi parcurgând în sens invers obţinem:
( ) xxF = . Consecinţe:
1. Dacă n p= atunci matricile ( )RnnMA ,,∈ care verifică InAAAA tt =⋅=⋅ se numesc ortogonale. Deci în cazul unui endomorfism ortogonal
este matrice ortogonală.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
52
2. Ţinând seama că dacă ( )RnnMBA ,,, ∈ , atunci ( ) BABA detdetdet ⋅=⋅ , rezultă că în cazul matricilor ortogonale avem că:
( ) 1detdetdetdet =⋅⇒=⋅ AAIAA tn
t ,
dar AAt detdet = , deci ( ) 1det 2 =A , de unde 1det ±=A . 3. Un endomorfism ortogonal cu ( ) 1,det =BFM se numeşte rotaţie.
7.3 Translaţii. Izometrii
Definiţia 7.3. Endomorfismul definit prin ( ) nEaaxxF ∈+= , se numeşte translaţie de vector a pe nE .
Teorema 7.5. 1). Dacă 1F e o translaţie de vector 1a pe nE şi 2F este o
translaţie de vector 2a pe nE , atunci 12 FF ⋅ este translaţie de vector 21 aa + pe
nE . 2. Dacă F este translaţie de vector a pe nE , atunci 1−F este translaţie de
vector a− pe nE . Demonstraţie. 1) ( )( ) ( )( ) ( ) 21121212 aaxaxFxFFxFF ++=+==⋅ . 2) ( )( ) ( )( ) ( ) xaxFxxFFxxFF =+⇒=⇒= −−− 111 o . Înlocuind x cu ax − , obţinem ( ) axxF −=−1 . Consecinţă. Mulţimea tuturor translaţiilor pe nE formează un grup comutativ
în raport cu compunerea, grup izomorf cu grupul aditiv pe nE . Definiţia 7.4. O transformare surjectivă care păstrează
distanţa euclidiană ( ) nEyxyxyxd ∈∀−= ,,, se numeşte izometrie. Adică ( ) ( )( ) ( )yxdyFxFd ,, = . Teorema 7.6. Translaţia de vector a este o izometrie. Demonstraţie. Fie
astfel: ( ) ( )( ) ( ) ( ) ( ) ( ) ( )yxdyxayaxyFxFyFxFd ,, =−=+−+=−= .
deci F este izometrie.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
53
CAPITOLUL 8 FORME BILINIARE ŞI PĂTRATICE
Într-unul din capitolele anterioare am introdus produsul scalar, care este o
aplicaţie biliniară hermitică pozitiv definită, prin urmare era absolut necesar introducerea acestei noţiuni, mai ales că analiza matematică va cere determinarea punctelor critice, ori acest lucru se poate face foarte elegant folosind studiul formelor pătratice.
Structurarea capitolului este făcută pe patru subcapitole şi anume: forme biliniare, forme pătratice, reducerea formelor pătratice la expresia canonică şi signatura unei forme pătratice reale.
Acest capitol urmăreşte cu precădere dezvoltarea deprinderilor de a aplica rezultatele legate de transformari liniare, pe care le-au studiat anterior, şi sintetizarea noilor noţiuni în scopul utilizării acestora în cadrul capitolelor următoare.
8.1 Forme biliniare
Definiţia 8.1. Fie nV un K spaţiu vectorial. O aplicaţie KVxVF nn →: se numeşte formă biliniară dacă este formă liniară în ambele variabile, adică:
( ) ( ) ( ) KVyxxyxFyxFyxxF n ∈∀∈∀+=+ 212122112211 ,,,,,,,, αααααα , ( ) ( ) ( ) KVxyyyxFyxFyyxF n ∈∀∈∀+=+ 212122112211 ,,,,,,,, ββββββ .
Consecinţe 1) ( ) ( ) nVV VyxxFyF ∈∀== ,,00,,0 . Din definiţie pentru:
( ) ( ) ( ) 0,00
,,0
2
22221 =⇒⎭⎬⎫
==⇒=
yFyxFyxF
Vαααα
Analog pentru 0,0 21 == ββ .
2) ( ) [ ] ( )[ ]BBt yBxBFMxyxF ,= . În adevăr:
( ) [ ]( ) [ ] ( ) [ ]
( )( )
( ) ⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
===
,
,,
,,,, 2
1
n
Bt
Bt
B
eF
yeFyeF
xyBFMxyxBFyxFM
,
( ) [ ]( ) ( )[ ]( ) ( ) ( )( )[ ]Bniii
BiBii
yeeFeeFeeFyBxeFMyBeFyeF
,,, ,,,
21 K=
===,

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
54
[ ] ( )[ ]BBt yBxBFMxyFx ,, = ,
unde: ( )
( ) ( ) ( )( ) ( ) ( )
( ) ( ) ( )⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=
nnnn
n
n
eeFeeFeeF
eeFeeFeeFeeFeeFeeF
BxBFM
,,,
,,,,,,
:,
21
22212
12111
K
MMM
K
K
.
Exemplu: Produsul scalar pe un spaţiu vectorial real. Teorema 8.1. Fie ( )neeeB ,,, 21 K= o bază arbitrară în .nV O formă
biliniară KVxVF nn →: este complet determinată dacă se cunosc valorile sale:
( ) njieeF ijji ,1,,, == α Demonstraţie. Fie [ ] [ ]BBn yByxBxVyx ==⇒∈ ,, sau
∑∑==
==n
jjj
n
iii eyyexx
11,
Deci ( ) ( )∑∑∑∑= ===
=⎟⎟⎠
⎞⎜⎜⎝
⎛=
n
i
n
jjiji
n
jjj
n
iii eeFyxeyexFyxF
1 111
,,, .
Deci F e complet determinată dacă se cunosc: ( )ji eeF , cu nji ,1, = .
Expresia ( ) ( )∑∑= =
=n
i
n
jjiji eeFyxyxF
1 1
,, se numeşte expresia analitică a formei
biliniare în baza considerată, ( )ji eeF , se numesc coeficienţii formei biliniare în baza considerată iar matricea ( )[ ] ( )BxBFMeeF
njiji ,:,,1,=
= se numeşte matricea
formei biliniare în baza considerată. Deci sub formă matricială
( ) [ ] ( )[ ]BBt yBxBFMxyxF ,, =
sau ( ) [ ] ( )[ ]B
tB
t xBxBFMyyxF ,, = de unde ( ) [ ] ( )[ ]( )BB
tt yBxBFMxyxF ,, = . Forma biliară se va numi nedegenerată dacă ( )BxBFM , este nesingulară,
adică ( ) 0,det ≠BxBFM în caz contrar ea va fi degenerată, iar rangul formei biliniare este dat de rang ( )BxBFM ,

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
55
Definiţia 8.2. 1). Forma biliniară se numeşte simetrică dacă ( ) ( ) nVyxxyFyxF ∈∀= ,,,, .
2) Forma biliniară se numeşte antisimetrică dacă ( ) ( ) nVyxxyFyxF ∈∀−= ,,,, .
Exemplu: Produsul scalar pe nV - spaţiu vectorial real este o formă biliniară simetrică.
Teorema 8.2. 1). O formă biliniară este simetrică dacă şi numai dacă
( ) ( )KnSBxBFM ,, ∈ . 2) O formă biliniară este antisimetrică, dacă şi numai dacă
( ) ( )KnABxBFM ,, ∈ oricare ar fi nVB ⊂ .
Demonstraţie. Presupun că ( ) ( ) nVyxxyFyxF ∈∀= ,,,, şi fie B o bază oarecare în .nV Atunci ( ) [ ] ( )[ ]BB
t yBxBFMxyxF ,, 1= , iar
( ) [ ] ( )[ ] [ ] ( )[ ]BtB
tBB
t xBxBFMyxBxBFMyxyF ,,, == de unde ( ) ( )BxBFMBxBFM t ,, = .
Presupunând acum că ( ) ( )BxBFMBxBFM t ,, = şi parcurgând calea inversă, obţinem:
( ) ( ) nVyxxyFyxF ∈∀= ,,,, . 2. Se demonstrează analog. Teorema 8.3. Fie o formă biliniară KVxVF nn →: dată în baza ( )neeeB ,,, 21 K= şi fie ( )''
2'1
' ,,, neeeB K= o altă bază a lui .nV Dacă ',MB este matricea de trecere de la B la baza 'B , atunci:
( ) ( ) ( ) ( )''' ,,',, BBMBxBFMBBMBxBFM t= . Demonstraţie. Fie [ ] [ ] '
', BBn xBxBxVyx ==⇒∈ şi [ ] [ ] ''
BB yByBy == astfel putem scrie că:
( ) [ ] [ ]( ) [ ] ( )[ ] '''''''' ,,, BB
tBB yBxBFMxyBxBFyxF ==
şi ( ) ( )[ ] ( )[ ]( )
[ ] ( ) ( ) ( )[ ] .,,,
,,,,
''
''
''
''
Bt
Bt
BB
yBBMBxBFMBBMx
yBBBMxBBBMFyxF
=
==
Dar ( ) [ ] ( )[ ] '''',, BB
t yBxBFMxyxF = , de unde: ( ) ( ) ( ) ( )'''' ,,,, BBMBxBFMBBMBxBFM t= .

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
56
Definiţia 8.3. Fie KVxVF →: o formă biliniară simetrică, mulţimea ( ){ } KerFVyyxFVx =∈∀=∈ :,0, se numeşte nucleul formei biliniare.
Teorema 8.4. Nucleul unei forme biliniare simetrice este un subspaţiu
vectorial al lui V.
Demonstraţie. Fie ( )( ) Vz
zyFzxF
KerFyx ∈∀⎩⎨⎧
==
⇒∈ ,0,0,
, .
Pentru orice ( ) ( ) 0,,,, =+∈ zyFzxFK βαβα , adică ( ) VzzyxF ∈∀=+ ,0,βα ,
deci KerFyx ∈+ βα .
8.2 Forme pătratice
Definiţia 8.4. Aplicaţia KVP →: definită prin egalitatea ( ) ( )VxxxFxP ∈∀= ,, în care ( )yxF , e o formă biliniară simetrică, se numeşte
forma pătratică asociată formei biliniare simetrice F, iar F se numeşte forma polară sau forma dedublată a lui P.
Exemplu: Forma pătratică corespunzătoare produsului scalar real este pătratul
normei euclidiene ( ) 2, xxx = . Teorema 8.5. Dacă se cunoaşte forma pătratică ( )xP atunci forma biliniară
simetrică ( )yxF , este determinată prin:
( ) ( ) ( ) ( )[ ] VyxyPxPyxPyxF ∈∀−−+= ,,21, .
Demonstraţie.
( ) ( ) ( )[ ] ( ) ( ) ( )[ ]
( ) ( ) ( ) ( ) ( ) ( )[ ]
( ) ( )[ ] ( )yxFxyFyxF
yyFxxFyyFxyFyxFxxF
yyFxxFyxyxFyPxPyxP
,,,21
,,,,,,21
,,,21
21
=+=
=−−++−=
=−−++=−−+

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
57
Consecinţe: Expresia formei pătratice asociată formei biliniare simetrice într-o bază VB ⊂ se obţine din expresia formei biliniare simetrice făcând yx = astfel ( ) [ ] ( )[ ]BB
t xBxBFMxxP ,= . Matricea şi rangul formei pătratice P coincid cu matricea şi rangul formei
biliniare simetrice F asociate lui P. Definiţia 8.5. Fie KVxVF →: o formă biliniară simetrică. Vectorii
Vyx ∈, se numesc ortogonali în raport cu F, dacă ( ) 0, =yxF . Definiţia 8.6. Fie 1V un subspaţiu vectorial al K - spaţiu vectorial V şi o formă
biliniară simetrică KVxVF →: . Mulţimea ( ){ } ⊥=∈∀=∈ 11 :,0, VVxyxFVy se numeşte complementul
ortogonal al lui 1V în raport cu F. Definiţia 8.7. Fie KVxVF nn →: o formă biliniară simetrică. O bază ( )neeeB ,,, 21 K= al lui nV se numeşte ortogonală în raport cu forma F dacă
( ) njieeF ijijji ,1,,, == δα . De aici rezultă că într-o bază ortogonală avem:
( ) ( )KnDBxBFM
nn
,
000
000000
, 22
11
∈
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=
α
αα
K
MKMMM
K
K
.
Într-o astfel de bază avem:
( ) ∑=
=n
iiiii yxyxF
1, α ,
iar:
( ) ∑=
=n
iiiii xxxP
1
2α .
Aceste expresii se numesc respectiv expresia canonică asociată formei biliniare simetrice F şi expresia canonică asociată formei pătratice P. Se spune în acest caz că forma biliniară simetrică, respectiv forma pătratică, au fost reduse la expresia canonică.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
58
8.3 Reducerea formelor pătratice la expresia canonică
Teorema 8.6. (Metoda Jacobi) Fie RVP n →: o formă pătratică şi ( )BxBFM , matricea ei în baza ( )neeeB K,, 21= . Dacă toţi determinanţii:
( )BxBFMn ,det,,,,,1
333231
232221
131211
32221
121121110 =Δ=Δ=Δ=Δ=Δ K
ααααααααα
αααα
α
numiţi determinanţi minori principali ai matricei ( )BxBFM , sunt nenuli, atunci există o bază ( ) ,,,,, '''
2'1
'nn VBeeeB ⊂= K în raport cu care expresia formei
pătratice, devine:
( ) ∑=
−
ΔΔ
=n
ii
i
i xxP1
2'1 ,
în care ∑=
=n
jjjexx
1
'' .
Demonstraţie: Să considerăm:
( )
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
=
nn
n
n
n
BBM
λ
λλλλλλλλλ
000
000
', 333
22322
1131211
MMMM
K
K
K
.Pentru a aduce o formă pătratică P la
forma canonică este suficient ca pentru njji ,1,1,1 =−=∀ să asigurăm condiţia ( ) 0, '' =ji eeF de unde şi ( ) 0, '' =ij eeF ca rezultat al simetriei matricei ( )BxBFM , . Dar ( ) [ ]( ) 0,0, '''' =⇔=
Bjiji eBeFeeF sau ( )[ ] 0, '' =ji eBxeFM , unde:
( ) ( ) ( ) ( )( )niiii eeFeeFeeFBxeFM ,,,, '2
'1
'' K=
sau ţinând seama că ∑=
=j
kkkjj ee
1
' ,λ , atunci ( ) ( )∑=
=j
kkikjji eeFeeF
1
''' ,, λ
ceea ce înseamnă că pentru a realiza ( ) 0, '' =ji eeF e suficient ca:
( )nj
jijk
eeF ji
,11,1
,1,0, ''
=−=
== .

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
59
Pentru a simplifica raţionamentul mai presupunem ( ) 1,' =ii eeF Cu aceasta obţinem sistemul:
( )( )⎪⎩
⎪⎨⎧
=
−==
1,
1,1,0,'
'
ii
ki
eeF
ikeeF
Dar: ( ) [ ]( ) [ ] ( )
[ ]( )
( )( )
iiikikik
ik
k
k
iiii
ki
ki
Bit
kBit
kBiki
eeF
eeFe
exBFMeeeBFeeF
λαλαλαα
αα
λλλ
+++=
=
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
===
K
MKM
2211
2
1
21'
'''
,,,,
,
,,,
de unde sistemul:
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
=
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
−−−−
10
00
2
1
2
1
21
11211
2212
12111
MM
K
K
MMM
K
K
ii
ii
i
i
iiii
iiii
i
i
λλ
λλ
αααααα
αααααα
de unde .1
i
iij Δ
Δ= −λ
Teorema 8.7. Fie nE un spaţiu vectorial euclidian. Dacă REP n →: e o
formă pătratică, atunci există o bază ( )''2
'1
' ,,, neeeB K= a lui nE în raport cu care expresia canonică a formei este:
( ) ∑=
=n
iii xxP
1
2'λ ,
în care sunt valorile proprii ale matricei formei ( )BxBFM , , fiecare valoare proprie este scrisă de atâtea ori cât este multiplicitatea sa, iar:
∑=
=n
jjj exx
1
'' .
Demonstraţie. Deoarece ( ) ( )RnSBxBFM ,, ∈ ea admite numai valori
proprii reale şi se poate diagonaliza. Atunci baza căutată ( )''2
'1
' ,,, neeeB K= este

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
60
formată din vectorii proprii ortonormaţi ai matricei formei. În această bază obţinem expresia canonică a formei.
8.4 Signatura unei forme pătratice reale
Definiţia 8.8. Fie o formă pătratică REP n →: dacă: 1. ( ) nExxP ∈∀≥ ,0 , se numeşte pozitiv semidefinită; 2. ( ) nExxP ∈∀> ,0 se numeşte pozitiv definită; 3. ( ) nExxP ∈∀< ,0 se numeşte negativ definită; 4. ( ) nExxP ∈∀≤ ,0 se numeşte negativ semidefinită. Teorema 8.8.(Criteriul lui Sylvester). Dacă sunt îndeplinite condiţiile
teoremei Jacobi (8.6.), atunci forma pătratică este pozitiv definită dacă şi numai dacă nii ,1,0 =>Δ şi negativ definită dacă şi numai dacă ( ) nkk
k ,1,01 =>Δ− . Demonstraţie. Fie P o formă pozitiv definită. Presupun prin absurd că
npp ≤≤=Δ∃ 1,0 , atunci una din liniile lui pΔ este o combinaţie liniară de celelalte, adică pkk ,,1 K∃ nu toate nule astfel încât:
pikkk pipii ,1,02211 ==+++ αεα K , adică:
( ) ( ) ( )( ) .,1,0,
0,,,
2211
2211
pieekekekF
eeFkeeFkeeFk
ipp
ippii
==+++⇒
=+++
K
K
Cum F e biliniară simetrică, amplificând cu piki ,1, = şi sumând obţinem:
0,,,11
221
11 =⎟⎟⎠
⎞⎜⎜⎝
⎛++⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛ ∑∑∑===
p
ipiip
p
iii
p
iii eekFkeekFkeekFk K sau:
00,111
=⇒=⎟⎟⎠
⎞⎜⎜⎝
⎛ ∑∑∑===
n
iii
n
iii
p
iii ekekekF (deoarece F este pozitiv definită).
Cum piki ,1, = nu sunt toţi nuli, atunci neee ,,, 21 K sunt liniar dependenţi - contradicţie cu ipoteza ( )neee ,,, 21 K bază în nV .
Deci npp ,1,0 =≠Δ . Mai mult, conform teoremei Jacobi, există o bază în nV în care:

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
61
( ) 2'
1
1i
n
i i
i xxP ∑=
−
ΔΔ
=
şi cum P e pozitiv definită, 01 >ΔΔ −
i
i , adică nii ,1,0 =∀>Δ .
Reciproc, dacă nii ,1,0 =∀>Δ , atunci nii
i ,1,01 =∀>ΔΔ − şi, din
( ) 2'
1
1i
n
i i
i xxP ∑=
−
ΔΔ
= atunci ( ) 0≥xP
( ) ,00 ''2
'1 ====⇔= nxxxxP K
deci 0=x . În concluzie, ( ) .0,0 ≠∀> xxP Dacă ( )xP e negativ definită, atunci P− e pozitiv definită şi totul se repetă ca
mai sus având în vedere că matricea lui P− este [ ] .,1, njiijA
=−=− α

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
62
CAPITOLUL 9
SPAŢII ALE VECTORILOR DIN E3 Unul dintre primele exemple istorice de spaţii vectoriale care stă la baza
interpretărilor geometrice ale algebrei liniare sau în mod dual, a raţionamentelor geometrice prin metode de algebră este spaţiul vectorilor liberi.
Studiul vectorilor a fost puternic impulsionat de fizică (mecanică, electromagnetism etc.) modelând operaţiile cu forţe, viteze. Acest studiu este datorat deopotrivă eforturilor unor matematicieni şi fizicieni ca W.R. Hamilton (1805-1865), H. Grassmann (1809-1877), A. Cayley (1821-1895), J. C. Maxwel (1831-1879) şi J. W. Gibbs (1830-1903).
Am structurat acest capitol pe patru subcapitole dedicate segmentelor orientate, spaţiului vectorilor legaţi, spaţiului vectorilor liberi, bazelor şi reperelor.
În urma parcurgerii acestui capitol cred că au fost atinse obiectivele urmărite şi anume cel de familiarizare cu noile noţiuni şi însuşirea acestora precum şi dezvoltarea capacităţii de operare cu vectori şi de folosire a proprietăţilor acestora în interpretarea diverselor fenomene.
9.1 Segmente orientate. Echipolenţă Notăm cu 3E spaţiul punctual tridimensional euclidian din geometria
elementară, adică al geometriei în care este admisă axioma paralelelor: ''Printr-un punct exterior unei drepte d, trece cel mult o dreaptă paralelă cu dreapta dată''.
Punctul, dreapta, planul şi spaţiul 3E sunt noţiuni primare legate prin anumite axiome, care sunt axiomele geometriei elementare.
Considerăm mulţimea Δ a tuturor dreptelor din 3E . În mulţimea ΔΔ x introducem relaţia 1 2 1 2: “ sau ”.d d d dρ = = Această relaţie are proprietăţile:
− reflexivă, 11 dd ρ ;
− simetrică, 1221 dddd ρρ ⇒ ;
− tranzitivă, 21 dd ρ şi 3132 dddd ρρ ⇒ ,
adică ρ este o relaţie de echivalenţă pe Δ pe care o notăm cu ”∼”.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
63
Submulţimea, }{ Cldddd =∼Δ∈ :'' a tuturor elementelor care sunt
echivalente cu un element dat d ∈Δ se numeşte clasă de echivalenţă ce conţine d.
Deoarece d ∼ d, atunci Cldd ∈ şi orice element Cldd ∈' se numeşte reprezentant al clasei Cld .
Ca proprietate semnalăm următoarea: mulţimea claselor de echivalenţă prin relaţia ∼ este o partiţie a mulţimii Δ, în sensul că Δ este o reuniune de submulţimi disjuncte.
Definiţia 9.1. Se numeşte direcţia dreptei ,d ∈Δ clasa de echivalenţă a
relaţiei ” 21 dd sau 21 dd = ” în care d este un reprezentant al acestei clase. Altfel exprimat, o direcţie este mulţimea tuturor dreptelor din spaţiul 3E cu
proprietatea ” 21 dd sau 21 dd = ”. Definiţia 9.2. Se numeşte segment orientat orice pereche ( ) 33, ExEBA ∈ în
care A şi B sunt puncte din 3E şi se notează ( ) ABBA =, .
Grafic se reprezintă printr-o săgeată de la A la B. A se numeşte originea
segmentului orientat AB, iar B se numeşte extremitatea segmentului orientat AB Dreapta determinată de punctele A şi B se numeşte suportul segmentului orientat
şi se notează ABAB sup:= .
A B Caz particular: Dacă A B= segmentul orientat AA se numeşte segment
orientat nul, grafic se reprezintă printr-un singur punct A, iar AAsup este nedeterminat.
Definiţia 9.3. (1) Lungimea, norma sau modulul unui segment orientat AB este
distanţa dintre A şi B şi se notează ( ) ABBAd :, = . (2) Direcţia unui segment orientat AB cu A B≠ este direcţia ABsup .
Segmentele orientate nule au direcţia nedeterminată. (3) Segmentele orientate AB şi BA se numesc opuse. Dacă BABAAB =⇒= .

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
64
(4) Fie AB un segment orientat nenul, se numeşte sens de parcurs pe ABsup sensul de la A spre B.
(5) O dreaptă împreună cu alegerea unui sens de parcurs se numeşte dreaptă orientată.
(6) O direcţie împreună cu unul din cele două sensuri posibile se numeşte direcţie orientată.
(7) Două segmente orientate nenule AB şi CD au acelaşi sens dacă: a) dCDAB == supsup şi sensul de parcurs determinat de AB pe d este
acelaşi cu sensul de parcurs determinat de CD pe d; b) CDAB supsup şi extremităţile lor B şi D se află în acelaşi semiplan din
planul dreptelor suport, determinat de ACsup , adică ( )BACD ,sup∈ sau ( )DACB ,sup∈ .
Definiţia 9.4. Două segmente orientate nenule se numesc echipolente dacă au
aceeaşi direcţie, acelaşi sens şi aceeaşi lungime. Dacă AB şi CD sunt echipolente, aceasta se notează cu AB ∼ CD.
Teorema 9.1. Relaţia de echipolenţă are următoarele proprietăţi: 1) este o relaţie de echivalenţă. 2) AB ∼ CD ⇔ BA ∼ DC. 3) AB∀ şi 33 ! EDEC ∈∃⇒∈∀ astfel încât AB ∼ CD. 4) AB ∼ CD ⇔ AC ∼ BD. Demonstraţia o lăsăm ca temă cititorului.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
65
9.2 Spaţiul vectorilor legaţi din E3
Fie 3EO∈ un punct fixat şi mulţimea { } ( )303 : ETEMOM =∈ a segmentelor
orientate din 3E cu originea în O. Introducem în ( )30 ET operaţiile: 1. Adunarea segmentelor orientate din ( )30 ET este definită de relaţia:
OPONOM =+ în care P este simetricul punctului O faţă de mijlocul segmentului [ ]MN . Această regulă e echivalentă cu regula paralelogramului sau cu regula triunghiului.
2. Operaţia de înmulţire a segmentelor orientate cu numere reale este definită
astfel: i) Dacă
00rOMr
≠ şi 0≠λ atunci OMλ este segmentul orientat care are ( )OMOM λsupsup = , acelaşi sens cu OM dacă 0>λ şi sens contrar dacă 0,<λ
lungimea OMλ ;
ii) Dacă 0
0rOMr
= sau 0,=λ atunci OOOM = . Teorema 9.2. Mulţimea ( )30 ET formează un spaţiu vectorial real în raport cu
operaţiile de adunare a segmentelor orientate şi de înmulţire cu numere reale a segmentelor orientate.
Spaţiul vectorial ( )30 ET se numeşte spaţiul vectorial tangent la 3E în O. Elementele sale se numesc vectori legaţi în O sau vectori tangenţi în O la 3E .
Cazuri particulare.
CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
66
1. Fie d o dreaptă în 3E şi ,O d∈ mulţimea { } ( )10: ETdMOM =∈ este un subspaţiu vectorial al lui ( )30 ET . Subspaţiul ( )10 ET se numeşte dreapta vectorială tangentă în O la 3E .
2. Fie α un plan şi ,O α∈ mulţimea { } ( )20: ETdMOM =∈ este un subspaţiu vectorial al lui ( )30 ET şi se numeşte plan vectorial tangent în O la 3E .
9.3 Spaţiul V al vectorilor liberi din E3. Vectori coliniari, vectori coplanari în E3
Definiţia 9.5. 1) Clasele de echivalenţă ale segmentelor orientate relativ la
relaţia de echipolenţă se numesc vectori liberi. Direcţia, sensul şi lungimea care sunt comune segmentelor orientate ce
definesc un vector liber se numesc direcţia, sensul şi lungimea vectorului liber. Fiecare segment orientat din clasa numită vector liber este un reprezentant al
clasei. Notăm mulţimea vectorilor liberi din spaţiul 3E cu V. Vectorii liberi îi vom
nota cu litere mici ale alfabetului latin, prevăzute cu săgeţi deasupra. 2) Fie şi a b
rr doi vectori liberi şi 3EO∈ . Fie OA un reprezentant al clasei lui
ar şi OB un reprezentant al clasei lui b . Se numeşte sumă a vectorilor şi a brr
vectorul liber cr ∼ OBOAOC += şi notăm .c a b= +rr r
3) Fie RVa ∈∈ λ,r şi 3EO∈ . Fie OA un reprezentant al clasei lui .ar Se
numeşte produsul vectorului ar cu scalarul ,λ vectorul br
∼ OAλ şi notăm aλ=b .
Propoziţia 9.1. Mulţimea vectorilor liberi V din 3E înzestrată cu operaţiile
definite mai sus formează un spaţiu vectorial. Definiţia 9.6. 1. Doi vectori { }, , \ 0Va b c V∈
r rr r se numesc coliniari dacă au
aceeaşi direcţie. Vectorul nul având direcţia nedetermină se consideră coliniar cu orice vector din V.
2. Trei vectori { }, , \ 0Va b c V∈r rr r se numesc coplanari dacă 3EO∈∀
reprezentanţii OA, OB, OC ai claselor lui ,a brr respectiv cr sunt situaţi într-un
plan. Vectorul nul se consideră coplanar cu oricare doi vectori din V.
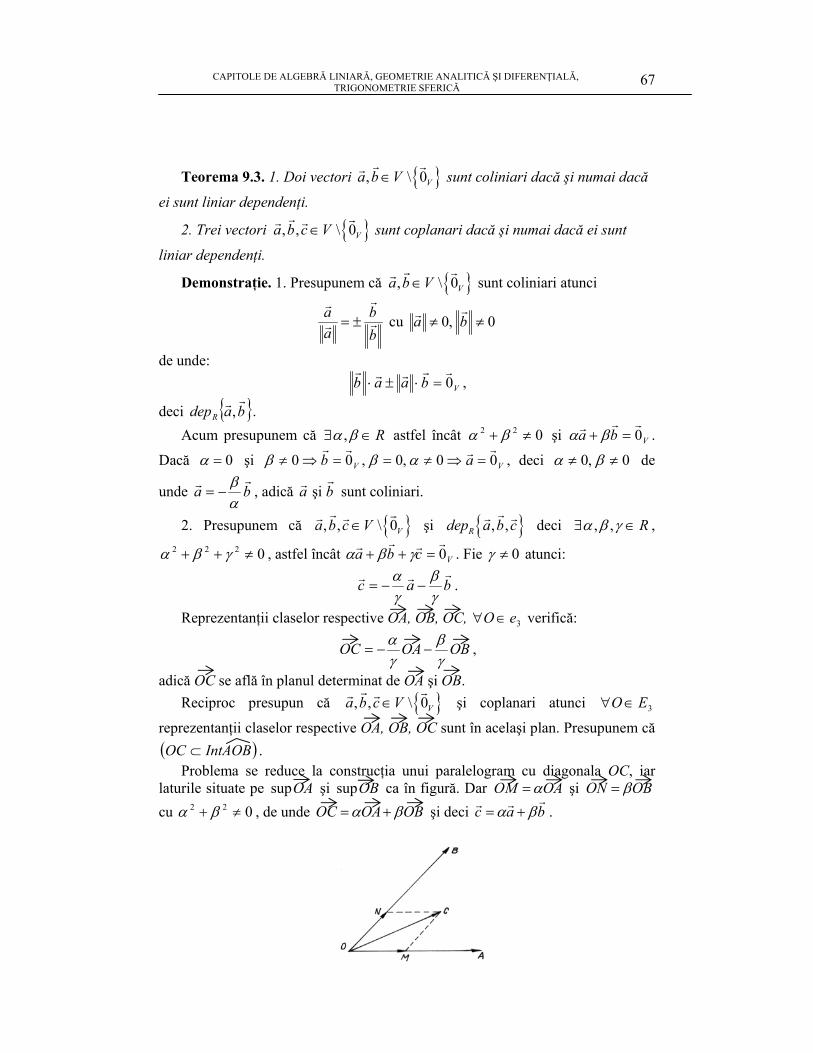
CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
67
Teorema 9.3. 1. Doi vectori { }, \ 0Va b V∈r rr sunt coliniari dacă şi numai dacă
ei sunt liniar dependenţi.
2. Trei vectori { }, , \ 0Va b c V∈r rr r sunt coplanari dacă şi numai dacă ei sunt
liniar dependenţi.
Demonstraţie. 1. Presupunem că { }, \ 0Va b V∈r rr sunt coliniari atunci
cu 0, 0a b a ba b
= ± ≠ ≠rr rrrr
de unde:
Vbaab 0rrrrr
=⋅±⋅ ,
deci { }badepR
rr, . Acum presupunem că R∈∃ βα , astfel încât 022 ≠+ βα şi Vba 0
rrr=+ βα .
Dacă 0α = şi VV ab 00,0,00rrrr
=⇒≠==⇒≠ αββ , deci 0,0 ≠≠ βα de
unde barr
αβ
−= , adică şi a brr sunt coliniari.
2. Presupunem că { }, , \ 0Va b c V∈r rr r şi { }, ,Rdep a b c
rr r deci R∈∃ γβα ,, ,
0222 ≠++ γβα , astfel încât Vcba 0rrrr
=++ γβα . Fie 0γ ≠ atunci:
bacrrr
γβ
γα
−−= .
Reprezentanţii claselor respective OA, OB, OC, 3eO∈∀ verifică:
OBOAOCγβ
γα
−−= ,
adică OC se află în planul determinat de OA şi OB. Reciproc presupun că { }, , \ 0Va b c V∈
r rr r şi coplanari atunci 3EO∈∀
reprezentanţii claselor respective OA, OB, OC sunt în acelaşi plan. Presupunem că
( )IntAOBOC ⊂ . Problema se reduce la construcţia unui paralelogram cu diagonala OC, iar
laturile situate pe OAsup şi OBsup ca în figură. Dar OAOM α= şi OBON β= cu 022 ≠+ βα , de unde OBOAOC βα += şi deci bac
rrr βα += .

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
68
Consecinţe. i). Oricare doi vectori liberi necoliniari sunt liniar independenţi. ii). Oricare trei vectori liberi necoplanari sunt liniar independenţi.
9.4 Baze şi repere în V
Teorema 9.4. Spaţiul vectorial real V al vectorilor liberi din 3E are dimensiunea 3.
Demonstraţie. Se ştie că în V există trei vectori liberi liniar independenţi şi
anume oricare trei vectori necoplanari ( )cbaS rrr ,,= . Să arătăm că ( ) VSL = adică RVx ∈∃∈∀ γβα ,,,r astfel încât
x a b c ,α β γ= + +rr r r rezultând că S B= - bază în V.
Fie OA, OB, OC, OX reprezentanţii claselor a,b ,c ,rr r respectiv x,r atunci
OCOBOAOPONOMOX γβα ++=++= , deci x a b cα β γ= + +rr r r , adică
( ) VSL = . Concluzia este că 3dim =V . Consecinţa 9.2. i). Fiind dată o bază ( )321 ,, eeeB rrr
= a lui V atunci Vx∈∀r se
poate scrie [ ]1 1 2 2 3 3 Bx x e x e x e B x= + + =r r r r r în care [ ] ( )t
1 2 3Bx x x x=r şi astfel se

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
69
poate stabili un izomorfism între V şi 3E dacă B este fixată: 3: RVf B → ,
( ) ( )B 1 2 3f x x ,x ,x .=r
ii). Egalitatea, adunarea vectorilor şi înmulţirea vectorilor cu scalari dacă vectorii sunt exprimaţi în aceeaşi bază se reduc la aceleaşi operaţii în R3 între coordonate:
[ ] [ ] [ ] [ ] [ ] [ ]( ) ( ) 332221321321 ,,,,,, yxyxyxyyyxxx
yxyxyBxByx Bt
Bt
BBBB
===⇔=⇔
⇔=⇔=⇔=⇔=rrrrrrrr
[ ] [ ] [ ] [ ] [ ]( ) [ ][ ] [ ] [ ] [ ] [ ] [ ]( ) ( ) ( )
333222111
321321321
,, ,,,,,,
zyxzyxzyxzzzyyyxxx
zyxzyx
zByxBzByBxBzyx
Bt
Bt
Bt
BBB
BBBBBB
=+=+=+⇔⇔=+⇔
⇔=+⇔=+⇔
⇔=+⇔=+⇔=+rrrrrr
rrrrrrrrr
[ ] [ ] [ ] [ ] [ ] [ ]( ) ( ) .,,,,,, 332211321321 xyxyxyxxxyyy
xyxyxByBxy Bt
Bt
BBBB
λλλλλλλλ
===⇔=⇔
⇔=⇔=⇔=⇔=rrrrrrrr
iii). Dacă vectorii sunt coliniari, atunci coordonatele lor în aceeaşi bază sunt proporţionale şi reciproc.
iv). Trei vectori sunt coplanari dacă şi numai dacă rangul matricei formate din coordonatele lor, în aceeaşi bază, este mai mic decât trei.
Fie { }Vx, y,z V \ 0∈rr r r coplanari, atunci:
1 1 1 2 2 2 3 3 3z x y z x y , z x y , z x y ,λ μ λ μ λ μ λ μ= + ⇒ = + = + = +r rr
atunci 1 1 1
2 2 2
3 3 3
x y zdet x y z 0,
x y z
⎛ ⎞⎜ ⎟ =⎜ ⎟⎜ ⎟⎝ ⎠
deoarece coloana a 3-a este o combinaţie liniară a
celorlalte două, reciproca fiind imediat adevărată, parcurgând demonstraţia invers. Putem spune astfel că trei vectori nu sunt coplanari dacă şi numai dacă rangul
matricei formate din coordonatele lor este trei.
Definiţia 9.7. Fie ( )321 ,, eeeB rrr= o bază în V, 3EO∈ şi vectorii ,, 21 OEOE
3OE reprezentanţi ai claselor lui 1 2e ,er r respectiv 3e .r Se numeşte reper în 3E ansamblul ( ){ }321 ,,; OEOEOEO .
Punctul O se numeşte originea reperului. Dacă OzOEOyOEOxOE === 321 sup,sup,sup sunt orientate în sensul
vectorilor ( )321 ,, eee rrr , atunci în loc de reperul ( ){ }321 ,,; OEOEOEO considerăm
CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
70
triedrul Oxyz care are axele de coordonate Ox,Oy,Oz şi planele de coordonate zOxyOzxOy ,, .
Prin alegerea unui reper, oricărui punct 3EP∈ îi corespunde ( )30 ETOP∈ care se numeşte vectorul de poziţie al punctului P în raport cu ( )30 ET şi reciproc.
CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
71
CAPITOLUL 10 UNGHIURI, PROIECŢII ŞI PRODUSE DE
VECTORI LIBERI Este cunoscut faptul că multe probleme din fizică cer cunoaşterea noţiunilor
prezentate în acest capitol. Astfel momentul unei forţe relativ la un punct se determină cu ajutorul produsului vectorial, apoi determinarea volumelor, ariilor, a sensului intensităţii electrice şi a inducţiei electromagnetice precum şi direcţia de propagare a unei unde electromagnetice plane în vid, nu se pot face decât printr-o serioasă aprofundare a calculului vectorial.
Acest capitol cuprinde patru subcapitole: unghiuri şi proiecţii ortogonale, produsul scalar a doi vectori, produsul vectorial a doi vectori şi produsul mixt a trei vectori.
Obiectivele urmărite sunt cele de înţelegere, aprofundare a noţiunilor şi formarea deprinderii de a utiliza în practică cunoştinţele dobândite aici.
10.1 Unghiuri. Proiecţii ortogonale
Definiţia 10.1. (1) Orice vector { }Va V \ 0∈rr care are aceeaşi direcţie cu o
dreaptă dată d ∈Δ se numeşte vector director al dreptei. Dacă ar este vectorul director al dreptei d, atunci orientarea dreptei e aceeaşi
cu a vectorului director.
(2) Unghiul dintre doi vectori { }Va ,b V \ 0∈r rr este unghiul determinat de
reprezentanţii claselor corespunzătoare adică unghiul dintre OA şi OB şi se
notează ( )barr, , iar ( ) [ ]πμ ,0, ∈ba
rr .
3) Vectorii a şi brr se numesc ortogonali dacă ( )
2, πμ =barr .
(4) Unghiul dintre un vector ar şi o dreaptă orientată de vector director br
este unghiul dintre a şi b .
rr (5) Unghiul dintre două drepte orientate este unghiul dintre vectorii lor
directori.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
72
Teorema 10.1. (1) Oricare ar fi { }Va V \ 0∈rr şi d ,∈Δ atunci există şi sunt
unici doi vectori liberi a şi a′ ′′r r astfel încât a′r să fie coliniar cu d, iar a′′r ortogonal cu d şi a a a .′ ′′= +
r r r (2) Oricare ar fi vectorii { }Va şi b V \ 0∈
r rr există şi sunt unici doi vectori
a şi a , a′ ′′ ′r r r coliniar cu b ,r
iar a′′r ortogonal cu br
astfel încât a a a .′ ′′= +r r r
(3) Oricare ar fi { }Va V \ 0∈rr şi un plan α din 3E există şi sunt unici doi
vectori a şi a , a′ ′′ ′r r r coplanar cu α iar a′′r ortogonal cu α astfel încât a a a .′ ′′= +r r r
Demonstraţia rămâne ca exerciţiu. Definiţia 10.2. (1) Componenta coliniară a unui vector { }Va V \ 0∈
rr cu o
dreaptă d se numeşte proiecţia vectorului pe dreapta d şi se notează ( )adrπ .
(2) Componenta coliniară a vectorului ar cu vectorul br
se numeşte proiecţia vectorului ar pe vectorul b
r şi se notează cu ( )ab
rrπ .
(3) Componenta coplanară a unui vector { }Va V \ 0∈rr cu un plan α se numeşte
proiecţia vectorului pe planul α şi se notează cu ( )arαπ . Consecinţe. 1) Mulţimea proiecţiilor vectorilor liberi pe o dreaptă din 3E este
un spaţiu vectorial unidimensional. 2) Mulţimea ( ) { }{ }Vb a a,b V \ 0 ,b fixat∈π r
r rrr r este un spaţiu vectorial
unidimensional. 3) Mulţimea proiecţiilor vectorilor liberi pe un plan din 3E formează un spaţiu
vectorial bidimensional.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
73
4) Dacă 0bb ,b
=r
rr atunci:
( ) ( ) 0,cos bbaaab
rrrrrr ⋅=π ,
iar ( )baarrr ,cos se numeşte mărimea algebrică a proiecţiei vectorului ar pe
vectorul br
şi se notează cu ( )aprb
rr astfel ( ) ( ) 0bapra bb
rrrrr =π .
10.2 Produsul scalar
Definiţia 10.3. Se numeşte produsul scalar al vectorilor a,b V∈rr funcţia
RVxVF →: definită prin:
( ) ( )⎪⎩
⎪⎨⎧
==
≠≠⋅=⋅=
VV
VV
bsauadacă
bşiadacăbabababaF
00,0
00,,cos:, rr
rrrrrrrrrr
Proprietăţi: 1. Dacă b
r este versor, ( )1=b
r atunci:
( ) Vaaprbaaba b ∈∀==⋅rrrrrrr
r ,,cos .
2. ( )aba b pr a b pr b a , a ,b V .⋅ = ⋅ = ∀ ∈r rr r r rr r r r
3. Dacă a b ,=rr atunci 2a a a .⋅ =
r r r
4. a b b a, a ,b V .⋅ = ⋅ ∀ ∈r r rr r r
5. ( ) Vcbacbcacba ∈∀⋅+⋅=⋅+rrrrrrrrrr ,,, .
Astfel: ( ) ( ) ( ) ( ) cbcacbprcaprcbaprcba ccc
rrrrrrrrrrrrrrrrr ⋅+⋅=⋅+⋅=⋅+=⋅+
(ştiind că OD=OA+AD=OA+OA).

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
74
Consecinţă. Funcţia ( ) babaFrrrr⋅=, definită mai sus este un produs scalar pe
RV / . 6. ( )a b a b cos a,b a b .⋅ = ⋅ ≤ ⋅
r r r rr r r r
7. Doi vectori liberi sunt ortogonali dacă şi numai dacă produsul lor scalar este nul.
8. Expresia produsului scalar dacă vectorii sunt exprimaţi în aceeaşi bază ( )321 ,, eeeB rrr
= devine:
[ ]( ) [ ]( ) [ ] ( )[ ]BBt
BB bBxBFMabBaBbarrrrrr ,==⋅
unde
( )⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
333231
322221
312111
,eeeeeeeeeeeeeeeeee
BxBFMrrrrrr
rrrrrr
rrrrrr
este matricea formei biliniare F definită de (10.3), denumită şi matricea Gram a vectorilor ( )321 ,, eee rrr .
Caz particular. Dacă baza ( )321 ,, eeeB rrr= este ortonormată: i j ije e ,δ=r r atunci
( ) 3, IBxBFM = şi [ ] [ ] 332211 bababababa BBt ++==⋅
rrrr .
9. O bază ortonormată în V se notează cu ( )kjiBrrr
,,= . Pentru Vx∈∀r avem
kxjxixxrrrr
321 ++= şi:
.3
2
1
xprkxx
xprjxx
xprixx
k
j
i
rrr
rrr
rrr
r
r
r
=⋅=
=⋅=
=⋅=
Într-o bază ortonormată coordonatele vectorului sunt mărimile algebrice ale proiecţiilor vectorului pe vectorii bazei şi se numesc coordonatele euclidiene ale vectorului.
În baza ( )kjiBrrr
,,= avem Vxxxxx ∈∀++=rr ,2
322
21 şi:
( ) ,,,,cos23
22
21
23
22
21
332211 Vbabbbaaa
babababa ∈∀++⋅++
++=
rrrr
iar condiţia de ortogonalitate a vectorilor a şi brr se exprimă prin:
.0332211 =++ bababa

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
75
10.3 Produsul vectorial
Definiţia 10.4. Vectorul: ( )
⎪⎩
⎪⎨⎧ ⋅⋅⋅
=coliniari, şi a dacă ,0
inecoliniar şi dacă ,,sin
V b
baebababxa rrr
rrrrrrrrr
în care er este un versor perpendicular pe a şi brr cu sensul dat de regula şurubului
cu filetul pe dreapta pentru tripletul ( ), , ,a b err r se numeşte produsul vectorial al
vectorilor a şi b.rr
Proprietăţi:
1. a b b a, a,b V .× = − × ∀ ∈r r rr r r (cu aceasta spaţiul vectorial al vectorilor liberi
devine o algebră necomutativă) 2. ( ) RkVbabkxabxakbxak ∈∀∈∀== ,,,
rrrrrrrr . 3. Vaaxxa VVV ∈∀==
rrrrrr ,000 .
4. Vaaxa V ∈∀=rrrr ,0 .
5. Vbxa 0rrr
= pentru { } *,0\, RbaVba V ∈∀=⇔∈ λλrrrrr .
6. Construcţia geometrică a produsului vectorial a doi vectori { }VVba 0\,rrr
∈ (construcţia lui Jukovski).
Fie α un plan perpendicular în O pe ar şi ( )b
rαπ - proiecţia vectorului b
r pe α.
Notăm cu ( )( )bRrr
απ π2
vectorul ( )br
απ rotit în planul α cu .2π

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
76
Deoarece ( ) ( )babbrrrr
,sin⋅=απ atunci ( )( )bRabxarrrrr
απ π2
= .
7. ( ) cxabxacbxa rrrrrrr+=+ .
Într-adevăr: ( ) ( )( ) ( ) ( )( )
( )( ) ( )( ) cxabxacRabRa
cbRacbRacbxa
rrrrrrrrrr
rrrrrrrrrrr
+=+=
=+=+=+
απαπ
ααπαπ
ππ
πππ
22
22
8. ( ) cxbcxacxba rrrrrrr+=+
9. ( )2222bababxarrrrrr⋅−⋅= (Identitatea lui Lagrange).
Într-adevăr:
( ) ( )( )( )222
2222222
,cos1sin
baba
bababababxarrrr
rrrrrrrrrr
⋅−⋅=
=−⋅=⋅⋅=
10. Dacă a şi brr nu sunt coliniari,
( )bababxarrrrrr ,sin⋅=
este aria paralelogramului construit pe reprezentanţii OA şi OB. 11. Expresia produsului vectorial, dacă vectorii sunt exprimaţi în aceeaşi bază ( )321 ,, eeeB rrr
= .
Ţinând seama de faptul că i j Ve e 0× =rr r atunci pentru [ ]B
x B x=r r şi [ ]B
y B y=r r
putem scrie: ( ) ( )( )( ) ( )( ) ( )( )
( )⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−
−=
=−+−+−==++++=
3
2
1
12
13
23
211332
211221133113322332
332211332211
00
0
yyy
xxxx
xxexeexeexe
exeyxyxexeyxyxexeyxyxeyeyeyxexexexyxx
rrrrrr
rrrrrr
rrrrrrrr
sau dacă notăm matricea antisimetrică
[ ]aBxxx
xxxx
r=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−
−
00
0
12
13
23
atunci ( )[ ] [ ]a2 3 3 1 1 2 B B
x y e e e e e e x y .× = × × ×r r r r r r r r r r

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
77
Dacă alegem baza ortonormată astfel încât kjxijixkikxjrrrrrr
=== ,, , adică astfel încât reprezentanţii lor OA, OB, OC să determine un reper ortogonal drept, atunci:
( )[ ] [ ] [ ] [ ]BaBB
aB yxByxkjiyxx rrrrrrrrr
== , ceea ce se mai poate scrie sub forma determinantului formal:
.
321
321
yyyxxxkji
yxx
rr
rr=
Definiţia 10.5. Dublul produs vectorial a trei vectori a,b ,c
rr r este expresia: ( )cxbxa rrr .
Vom arăta că ( ) ( ) ( )cbabcacxbxa rrrrrrrrr⋅−⋅= .
Să considerăm pentru aceasta ( )cbaT rrr ,,0 . În acest caz ( )OBCcxb ⊥rr
, iar
( ) ( )OADcxbxa ⊥rrr .
Fie ( ) ( )OBCOADOF I= . Considerăm reperul ortonormat drept ( ){ }kjiO
rrr,,, ca în figură, atunci:
( ) ( ) ( ) ( ) ( ) ( ) jjciiccjjbiibbkkajjaarrrrrrrrrrrrrsrrrrrvr
+=+=+= ,, ,
de unde
( ) ( ) ( )( ) ( ) ( ) ( ) ( )b c b i c j b j c i k ,a b a j b j , a c a j c j ,⎡ ⎤× = ⋅ ⋅ − ⋅ ⋅ ⋅ = ⋅ ⋅ ⋅ = ⋅ ⋅⎣ ⎦r r r r r rr r r r r r r rr r r r r r r r r
iar ( ) ( )( )( ) ( )( )[ ]icjbjcibjacxbxarrrrrrrrrrrrv ⋅⋅−⋅⋅⋅= .
Acum, dacă înmulţim la stânga cu a c⋅r r pe b ,r
cu a b⋅rr pe cr obţinem:

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
78
( ) ( ) ( ) ( )( ) ( )( )a c b a b c a j b i c j b j c i i ,⎡ ⎤⋅ − ⋅ = ⋅ ⋅ ⋅ − ⋅ ⋅⎣ ⎦r r r rr r r r r rr r r r r r r deci:
( ) ( ) ( )cbabcacxbxa rrrrrrrrv ⋅−⋅=
Ca proprietate, ( ) ( ) ( )a b c a c b b c a.× × = ⋅ − ⋅r r rr r r r r r
Într-adevăr, Deci produsul vectorial nu e asociativ şi putem scrie că:
( ) ( ) ( ) ( )bcaacbbxaxccxbxarrrrrrrrrrrr
⋅+⋅−=−= .
10.4 Produsul mixt
Definiţia 10.6. Fiind daţi trei vectori a,b ,crr r se numeşte produsul mixt al
acestor vectori numărul ( )a b c×rr r adică produsul scalar dintre vectorul ar şi
produsul vectorial al vectorilor b şi c .r r
Proprietăţi:
1. Dacă vectorii a,b ,crr r nu sunt coplanari fie OA, OB, OC reprezentanţii
claselor respective, atunci modulul produsului mixt reprezintă volumul paralelipipedului construit pe reprezentanţii claselor respective.
Într-adevăr, ( ) ( )cxbacxbacxba rrrrrrrrr ,cos⋅=⋅ dar [ ]OBCcxb σ2=rr
, iar
( ) ( )aprcxbaa cxb
rrrrrrr=,cos , deci, ( ) [ ]''' CMOBCMABVcxba =⋅
rrr .
2. Dacă ( )(D ,A atunci a b c 0∈ ⋅ × >α
rr r în acest caz reperul ( ){ }cbaO rrr ,,; se
numeşte reper orientat pozitiv.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
79
Dacă 'D aparţine semispaţiului opus, atunci ( )a b c 0⋅ × <rr r şi reperul
( ){ }cbaO rrr ,,; se numeşte reper orientat negativ.
3. ( ) ( ) ( )a b c b c a c a b ,× × = ⋅ × = ⋅ ×r r rr r r r r r adică produsul mixt e invariant la o
permutare circulară a factorilor. Din această cauză uneori produsul mixt se mai notează când nu e pericol de confuzie ca triplete ordonate ( )cba rrr ,, .
4. ( ) ( )bxcacxbarrrrrr
⋅−=⋅ .
5. ( ) ( ) ( )a b c a b c a b c , .⋅ × = ⋅ × = ⋅ × ∀ ∈Rλ λ λ λr r rr r r r r r
6. ( ) ( ) ( ) ( )cxbacxbacxbaa rrrrrrrrrr⋅+⋅=⋅+ 2121 .
7. ( ) ( ) ( )[ ] ( ) ( )[ ]( )( ) ( )( ).cbdadbca
badabdcbxaxdcdxcbxarrrrrrrr
rrrrrrrrrrrrrrr
⋅⋅−⋅⋅=
=⋅−⋅⋅=⋅=⋅
8. ( ) ( ) ( ) ( ) ( ) ( )a b c d a b d c a b c d c d a b⎡ ⎤ ⎡ ⎤× × × = × ⋅ − × ⋅ = − × × × =⎣ ⎦ ⎣ ⎦r r r r r r r rr r r r r r r r
( ) ( ) ( ) ( )c d b a c d a b c d a b c d b a.⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤= − × ⋅ + × ⋅ = × ⋅ − × ⋅⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦r r r r r r r rr r r r r r r r
9. Dacă ( )cbaB rrr ,,= este o bază atunci din 8) rezultă că orice vector d V∈r
se poate exprima prin:
( )( )
( )( )
( )( )
d b c d a bd c ad a b c
a b c a b c a b c
⋅ × ⋅ ×⋅ ×= + +
⋅ × ⋅ × ⋅ ×
r r r rrr rr rr rr rr r rr r r r r r
din 8) rezultă:
( ) ( ) ( ) ( )d a b c c d b a c d a b a b d c ,⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤× ⋅ = × ⋅ − × ⋅ + × ⋅⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦r r r r r r r rr r r r r r r r
( ) ( ) ( ) ( )d a b c d b c a d c a b d a b c ,⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎡ ⎤⋅ × = ⋅ × + ⋅ × + ⋅ ×⎣ ⎦⎣ ⎦ ⎣ ⎦ ⎣ ⎦r r r r r r r rr r r r r r r r
deci: ( )( )
( )( )
( )( )
d b c d a bd c ad a b c.
a b c a b c a b c
⋅ × ⋅ ×⋅ ×= + +
⋅ × ⋅ × ⋅ ×
r r r rrr rr rr rr rr r rr r r r r r
Notăm ( ) ( ) ( )*: , * : , * : ,b c c a a ba b ca b c a b c a b c
× × ×= = =
⋅ × ⋅ × ⋅ ×
r rr r r rrr rr r rr r r r r r numiţi vectori
reciproci ai vectorilor necoplanari , ,a b crr r şi ( ) ( ) ( )* * *d d a a d b b d c c= ⋅ + ⋅ + ⋅
r r r r r rr r r r
este expresia unui vector d în baza reciprocă. Baza ( )**** ,, cbaB rrr
= fiind numită baza reciprocă bazei B.
10. ( ) 0a b c⋅ × =rr r dacă şi numai dacă:

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
80
i) cel puţin unul din vectorii , ,a b crr r este nul;
ii) doi dintre cei trei vectori sunt coliniari; iii) vectorii , ,a b c
rr r sunt coplanari. 11. Dacă ( )kjiB
rrr,,= şi [ ] [ ], , .
B BBa B a b B b c B c⎡ ⎤= = =⎣ ⎦
r rr r r r
( ) [ ] ( ) [ ] [ ] [ ]BBBt
BBt cbacxbacxba rrrrrrrr 0
==⋅
( ) ( ) .
321
321
321
321
321321
cccbbbaaa
cccbbbkji
kajaiacxba =++=⋅
rrr
rrrrrr
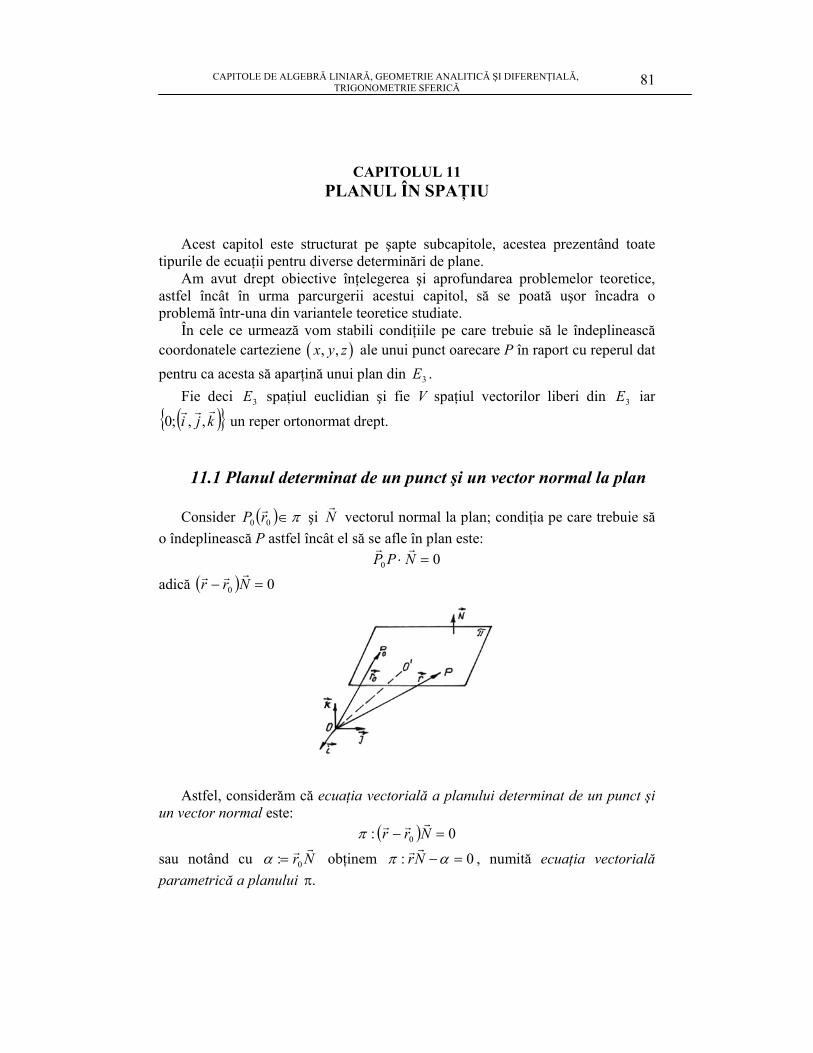
CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
81
CAPITOLUL 11 PLANUL ÎN SPAŢIU
Acest capitol este structurat pe şapte subcapitole, acestea prezentând toate tipurile de ecuaţii pentru diverse determinări de plane.
Am avut drept obiective înţelegerea şi aprofundarea problemelor teoretice, astfel încât în urma parcurgerii acestui capitol, să se poată uşor încadra o problemă într-una din variantele teoretice studiate.
În cele ce urmează vom stabili condiţiile pe care trebuie să le îndeplinească coordonatele carteziene ( ), ,x y z ale unui punct oarecare P în raport cu reperul dat pentru ca acesta să aparţină unui plan din 3E .
Fie deci 3E spaţiul euclidian şi fie V spaţiul vectorilor liberi din 3E iar
( ){ }kjirrr
,,;0 un reper ortonormat drept.
11.1 Planul determinat de un punct şi un vector normal la plan
Consider ( ) π∈00 rP r şi Nr
vectorul normal la plan; condiţia pe care trebuie să o îndeplinească P astfel încât el să se afle în plan este:
00 =⋅ NPPrr
adică ( ) 00 =− Nrrrrr
Astfel, considerăm că ecuaţia vectorială a planului determinat de un punct şi
un vector normal este: ( ) 0: 0 =− Nrr
rrrπ
sau notând cu Nrrr
0:=α obţinem 0: =−απ Nrrr , numită ecuaţia vectorială
parametrică a planului .π

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
82
Presupunând că 0P are coordonatele ( )000 ,, zyx atunci:
kzjyixrrrrr
0000 ++=
Ştiind că kzjyixrrrr
++= , iar { } kCjBiANVN V
rrrrrr++=∈ ,0\ unde
0222 ≠++ CBA , atunci ecuaţia vectorială a planului devine: ( ) ( ) ( ) 0000 =−+−+− CzzByyAxx
sau ( ) 0000 =++−++ CzByAxCzByAx .
Notând DCzByAx −=++ 000 , ecuaţia se mai scrie 0=+++ DCzByAx numită ecuaţia generală a planului în coordonate carteziene unde , ,A B C sunt coordonatele carteziene ale vectorului normal la plan.
Fie acum 'O pr Oπ= şi notez cu ( )',: OOdd = deci, 0rprd N
rr= .
Acum 00 rprNNr N
rrr=⋅=α .
222222
0000
CBA
D
CBA
CzByAx
N
Nr
Nd
++
−=
++
++=== r
rr
rα
.
Deci, 00 =⇔= Dd - aceasta fiind condiţia ca planul să treacă prin origine. Dacă notăm ( ) DCzByAxzyxf +++=,, , atunci : ( , , ) 0f x y zπ = reprezintă
un plan în care avem pentru Nr
expresia:
kzfj
yfi
xfgradfN
rrrr
∂∂
+∂∂
+∂∂
== .
Cazuri particulare: 0==⇒⊥ CBir
π şi 0: =+ DAxπ analog pentru jr
⊥π şi kr
⊥π , iar 0=⇒ AOxπ şi 0: =++ DCzByπ
11.2 Planul determinat de un punct şi care este paralel
cu doi vectori necoliniari
Fie ( ) VbarP ∈∈rrr ,,00 π deci:
1 2 3 1 2 3, , .N a b a a i a j a k b b i b j b k= × = + + = + +r r r rr r r r rr r
Condiţia pe care trebuie să o îndeplinească P pentru ca el să fie în planul π este:
( ) ( )0'0 bxarrrrrr
⋅−π motiv pentru care spunem că planul π este dat prin ecuaţia de mai sus, numită ecuaţie vectorială sau prin cea echivalentă cu ea, dată prin:

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
83
0:
321
321
000
=−−−
bbbaaa
zzyyxxπ .
Vectorii a şi brr fiind necoliniari bauPP
rr ν+=⇒ 0 cu Ru ∈ν, şi putem scrie:
baurrrrrr νπ ++= 0: ,
numită ecuaţia vectorială a planului sub formă parametrică.
Exprimând în coordonate carteziene:
,
,
,
,
321
321
0000
kbjbibb
kajaiaa
kzjyixr
kzjyixr
rrrr
rrrr
rrrr
rrrr
++=
++=
++=
++=
şi proiectând obţinem:
⎪⎩
⎪⎨
⎧
++=++=++=
=
330
220
110
buazzbuayybuaxx
ννν
π
ecuaţiile parametrice ale planului în coordonate carteziene u, R∈ν .

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
84
11.3 Planul determinat de trei puncte necoliniare
Se dau ( ) ( ) ( ) π∈332211 ,, rPrPrP rrr cu condiţia ca vectorii P1P2 şi P1P3 să nu fie coliniari.
În acest caz putem scrie că: .3121 PPxPPN =
r
Reducem problema la a scrie ecuaţia planului ce trece prin 1P şi are vector
normal la plan pe .Nr
Considerăm şi un punct ,P∈π atunci: ( )
( ) ( ) ( )[ ] 0:0:
13121
31211
=−−−=
rrxrrrrPPxPPPP
rrrrrrππ
sau
⇔=−−−−−−−−−
0:
131313
121212
111
zzyyxxzzyyxxzzyyxx
π
0
1111
:
333
222
111 =⇔
zyxzyxzyxzyx
π
Dar ecuaţia vectorială de mai sus este echivalentă cu coplanaritatea vectorilor
211 , PPPP şi 31PP adică Ru ∈∃ ν, astfel încât .31211 PPPuPPP ν+=

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
85
Deci putem scrie că: ( ) ( ).: 13121 rrrrurr rrrrrr
−+−+= νπ Caz particular: Ecuaţia planului prin tăieturi: Presupunem că 1 2 3, , ,r ai r bj r ck= = =
rr rr r r deci:
( ) ( ) ( )1 2 3,0,0 , 0, ,0 , 0,0,P a P b P c ⇒
( )( ) ( )[ ]( )[ ]( )( )
,:0:0:
0:
0:
abcabcabzacybcxabzacyaxbc
jackabibckzjyiax
iakcxiajbiakzjyix
=−++
⇔=++−⇔=++++−
⇔=−−−++
πππ
πrrrrrr
rrrrrrrr
deci
,01: =−++cz
by
axπ
ecuaţia planului prin tăieturi.
11.4 Ecuaţia normală a planului. Ecuaţia normalizată a planului sub formă generală
Fie OprO π=' şi ( ).,πOdd =
Fie cos cos cos , 1,n i j k n= α + β + γ =rr rr r unde:
( )ininrrrr ,coscos =⋅=α
( )jnjnrrrr ,coscos =⋅=β
( )knknrrrr ,coscos =⋅=γ
1coscoscos 222 =++ γβα Putem scrie că ,Or d n′ = ⋅
r r iar ecuaţia planului devine:
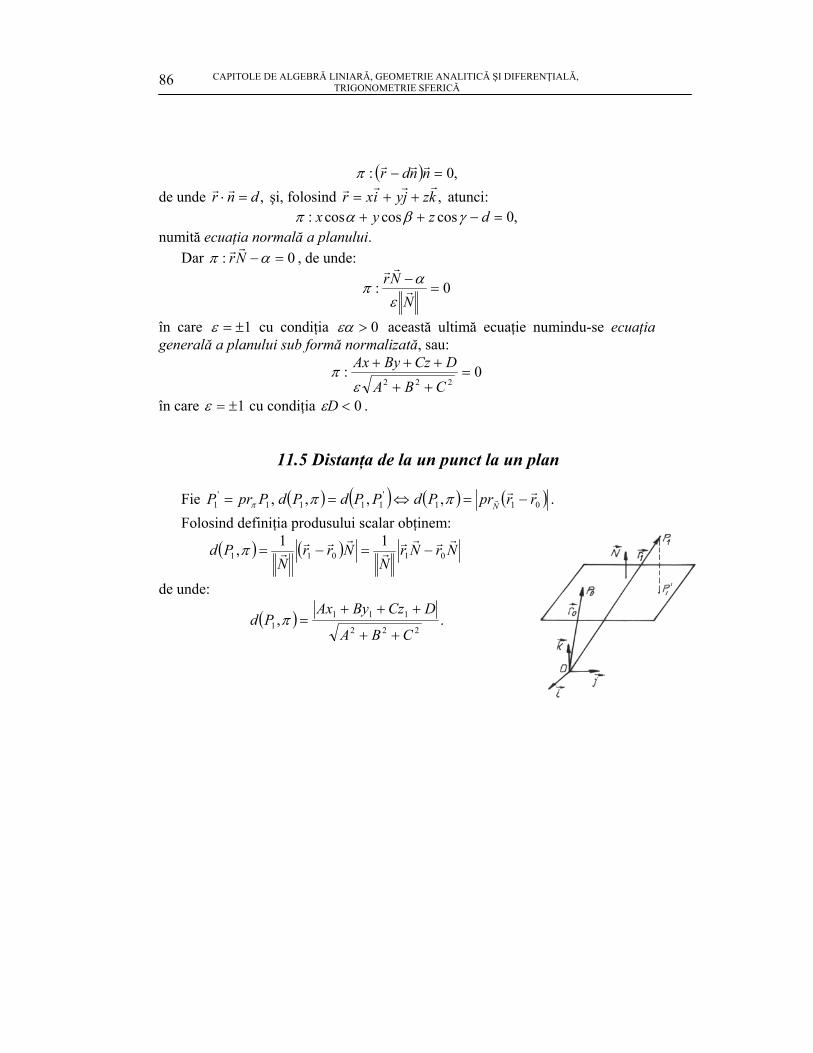
CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
86
( ) ,0: =− nndr rrrπ de unde ,r n d⋅ =
r r şi, folosind ,r xi yj zk= + +rr rr atunci:
,0coscoscos: =−++ dzyx γβαπ numită ecuaţia normală a planului.
Dar 0: =−απ Nrrr , de unde:
0: =−
NNrr
rr
εαπ
în care 1±=ε cu condiţia 0>εα această ultimă ecuaţie numindu-se ecuaţia generală a planului sub formă normalizată, sau:
0:222=
++
+++
CBADCzByAx
επ
în care 1±=ε cu condiţia 0<Dε .
11.5 Distanţa de la un punct la un plan
Fie ( ) ( ) ( ) ( )011'
1111'
1 ,,,, rrprPdPPdPdPprP N
rrr −=⇔== πππ .
Folosind definiţia produsului scalar obţinem:
( ) ( ) NrNrN
NrrN
Pdrrrr
rrrr
r 0101111, −=−=π
de unde:
( ) .,222
1111
CBA
DCzByAxPd
++
+++=π

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
87
11.6 Distanţa dintre două plane paralele
Consider 0:,0: 2211 =−=− απαπ NrNrrrrr şi
( ) ( )
( ) ( ) ( ) .1,
,,,,
2121212121
'11211
'1 2
NN
NrNrNrr
Nrrprd
PPddPprP
N rr
rrrrrrr
rrr
rαα
ππ
πππ
−=
−=−=−=
==
deci:
( ) ., 2121
Nd r
ααππ
−=
Dacă 0:,0: 2211 =+++=+++ DCzByAxDCzByAx ππ , atunci:
( ) .,222
1221
CBA
DDd
++
−=ππ
11.7 Semispaţiu. Plan orientat. Unghiul dintre două plane orientate
Spaţiul punctual E3 este împărţit în două semispaţii deschise, de un plan, care
sunt mulţimi convexe, iar planul este frontiera celor două semispaţii. Considerăm un plan π şi un reper ( ){ }kji
rrr,,;0 . În acest caz, alegerea normalei
Nr
la planul π caracterizează cele două semispaţii şi frontiera prin semnul funcţiei ( ) α−= Nrrf
rrr , astfel ( ) ( ) 0111 =⇒∈ rfrP rr π , unde:

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
88
( ) ( ) .11111 NPPNPPNrPPrfrf
rrrrrr⋅=−⋅+=+= α
Să considerăm: ( ) ( ){ } ( ) ( )( ) ,0,cos,0 1131 >−⋅−=>∈= NrrNrrrfrfErPS
rrrrrrrrr
deci ( )( ) ( ) ,2
,0,0,cos 11 ⎥⎦⎤
⎢⎣⎡∈−⇒>−
πμ NrrNrrrrrrrr deci în 1S sunt puncte care sunt
situate în semispaţiul spre care este orientat vectorul Nr
. Notăm += π:1S . Analog se arată că ( ) ( ){ }032 <∈= rfErPS rr este format din
puncte situate în semispaţiul spre care este orientat vectorul Nr
notat cu .π Definiţia 11.1. Perechea formată dintr-un plan şi un vector normal la plan
poartă numele de plan orientat. Unghiul dintre două plane orientate este unghiul format de normalele la
planele orientate şi
( ) ( ) .,cos,cos21
212121
NNNNNN rr
rrrr
⋅
⋅==ππ
Iar dacă ,0:,0: 2222211111 =+++=+++ DzCyBxADzCyBxA ππ atunci:
( )22
22
22
21
21
21
21212121 ,cos
CBACBA
CCBBAANN
++⋅++
++=
rr
Caz particular: .021212121 =++⇔⊥ CCBBAAππ
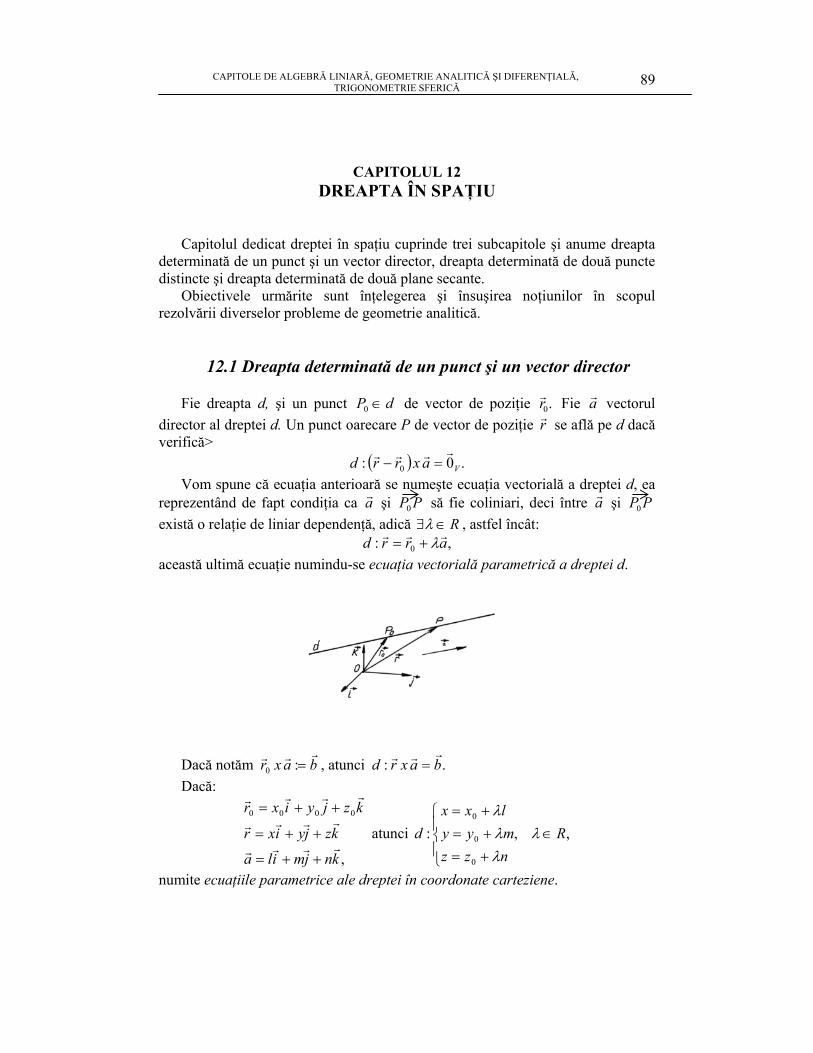
CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
89
CAPITOLUL 12 DREAPTA ÎN SPAŢIU
Capitolul dedicat dreptei în spaţiu cuprinde trei subcapitole şi anume dreapta determinată de un punct şi un vector director, dreapta determinată de două puncte distincte şi dreapta determinată de două plane secante.
Obiectivele urmărite sunt înţelegerea şi însuşirea noţiunilor în scopul rezolvării diverselor probleme de geometrie analitică.
12.1 Dreapta determinată de un punct şi un vector director
Fie dreapta d, şi un punct dP ∈0 de vector de poziţie 0.rr Fie ar vectorul director al dreptei d. Un punct oarecare P de vector de poziţie rr se află pe d dacă verifică>
( ) .0: 0 Vaxrrdrrrr
=− Vom spune că ecuaţia anterioară se numeşte ecuaţia vectorială a dreptei d, ea
reprezentând de fapt condiţia ca ar şi PP0 să fie coliniari, deci între ar şi PP0 există o relaţie de liniar dependenţă, adică R∈∃λ , astfel încât:
,: 0 arrd rrr λ+= această ultimă ecuaţie numindu-se ecuaţia vectorială parametrică a dreptei d.
Dacă notăm baxrrrr
=:0 , atunci .: baxrdrrr
= Dacă:
,
0000
knjmila
kzjyixr
kzjyixr
rrrr
rrrr
rrrr
++=
++=
++=
atunci ⎪⎩
⎪⎨
⎧
+=∈+=
+=
nzzRmyy
lxxd
λλλ
λ
0
0
0
,,:
numite ecuaţiile parametrice ale dreptei în coordonate carteziene.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
90
Dacă eliminăm ,λ atunci:
,: 000 λ=−
=−
=−
nzz
myy
lxx
d
numită ecuaţia dreptei în coordonate carteziene, , ,l m n fiind parametrii directori ai dreptei.
Dacă ⇒++=⇒= kjiaaaa
rrrrr
r
γβα coscoscos00 şi:
,coscoscos
: 000 λγβα
=−
=−
=− zzyyxx
d
de unde ( ) 222coscoscos nmlkjiknjmil ++⋅++=++rrrrrrγβα
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
++=
++=
++=
222
222
222
cos
cos
cos
nmln
nmlm
nmll
γ
β
α
numite cosinusurile directoare ale dreptei d.
12.2 Dreapta determinată de două puncte distincte
Pentru ( ) ( ) ,,, 12212211 rrPPadrPrP rrrrr−==∈ putem prezenta:

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
91
( ) ( )( )
( ) ( )
{ } ⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
−∈++
=
=−−
∈−+==−−
1\,1
rr:d
sau 0:
analog ,,:sau 0:
21
21
121
121
Rrrrxrrd
Rrrrrdrrxrrd
V
V
λλλ
λλ
rrr
rrrrr
rrrr
rrrrr
ecuaţiile vectoriale ale dreptei d.
Pornind de la ecuaţia ( )121: rrrrd rrrr−+= λ şi folosind ,r xi yj zk= + +
rr rr
1 1 1 1 2 2 2 2,r x i y j z k r x i y j z k= + + = + +r rr r r rr r , obţinem:
12
1
12
1
12
1:zzzz
yyyy
xxxxd
−−
=−−
=−−
sau
( )
( )
( ) { }
1 2
1 2
1 2
11
111 , \ 1 ,
1
x x x
y y y
z z z
⎧ = + λ⎪ + λ⎪⎪ = + λ⎨ + λ⎪⎪ = + λ λ∈ −⎪ + λ⎩
R
numite ecuaţiile parametrice ale dreptei în coordonate carteziene.
12.3 Dreapta determinată de două plane secante
Fie 0: 111 =−απ Nrrr şi 0: 222 =−απ Nr
rr două plane secante, adică
VNxN 021 ≠rr
, deci 1 2.d∃ = π πI
( )
( )( ) ( ) 21122112
122
211
NNNNrNNr
NNr
NNr
rrrrrrrr
rrr
rrr
αα
α
α
−=−
+−−−−−−−−−−
⋅=
−⋅=
adică ( ) .211221 NNNxNxrrrrrr αα −=
Deci ( ) ( ) .: 211221 NNNxNxrddrPrrrrrr αα −=⇔∈
Dacă se cunoaşte ( ) 2100 ππ Ir
=∈ drP , atunci ( ) ( ) VNxNxrrd 0: 210
rrrrr=− , iar
dacă: kCjBiANrrrr
1111 ++= ,2222 kCjBiANrrrr
++=

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
92
atunci condiţia ca planele:
,0:0:
22222
11111
=+++=+++
DzCyBxADzCyBxA
ππ
să se intersecteze este ca ,021 VNxNrrr
≠ adică:
2sau 0222
111
222
111 =⎟⎟⎠
⎞⎜⎜⎝
⎛≠
CBACBA
rangCBACBAkji
V
r
rrr

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
93
CAPITOLUL 13 PROBLEME ASUPRA PLANELOR ŞI DREPTELOR
Problemele relative la plane şi drepte pot fi împărţite in trei categorii şi anume: poziţiile relative ale planelor, fascicule de plane şi poziţiile unei drepte faţă de un plan.
În acest capitol am urmărit ca obiective: dezvoltarea deprinderilor de a încadra problemele în cadrul corespunzător şi de a prezenta cele mai variate şi atractive soluţii.
13.1 Poziţiile relative a două plane
Fie două plane 1π şi 2π având ecuaţiile vectoriale:
222
111
:
:
απ
απ
=
=
Nr
Nrrr
rr
sau în coordonate carteziene:
.0:0:
22222
11111
=+++=+++
DzCyBxADzCyBxA
ππ
a) ⇔≠==⇔= 0,, 212121 λλααλππ NN
rr
0,2
1
2
1
2
1
2
1 ≠==== λλDD
CC
BB
AA
.0,0 212121 ≠=⇔=⇔= λλππ NNNxN V
rrrrr
Fie ( ) 111 π∈rP r şi ( ) 222 π∈rP r şi ( ) ( )2211 rPrP rr≠ , atunci:

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
94
( ) ,21221222222
121111 λααλλαλα
αλα−=−⇒
⎪⎭
⎪⎬⎫
=⇒=
=⇒=Nrr
NrNr
NrNr rrrrrrr
rrrr
dar ( ) 21221 0 λαα =⇒=− Nrrrrr . Deci, din 21 NN
rrλ= şi ⇒= 21 λαα
.2
1
2
1
2
1
2
1
DD
CC
BB
AA
==== λ
b) 1 2 1 2 1 2, , 0N N a aπ π ⇔ = λ ≠ λ λ ≠ ⇔r r
.2
1
2
1
2
1
2
1
DD
CC
BB
AA
≠==
.0,0 212121 ≠=⇒=⇒ λλππ NNNxN V
rrrr
Fie ( ) 111 π∈rP r şi ( ) 222 π∈rP r , atunci 111 α=Nrr
şi 222 α=Nrr
de unde:
( ) 21221222
121 λααλλαλ
αλ−=−⇒
⎪⎭
⎪⎬⎫
=
=Nrr
Nr
Nr rrrrr
rr
dar ( ) 21221 0 λαα ≠⇒≠− Nrrrrr , deci:
.2
1
2
1
2
1
2
1
DD
CC
BB
AA
≠==
c) 0,2121 ≠≠⇔≠ λλφππ NNrr
I .0,00 212121 ≠≠⇔≠⇔≠ λλππ NNNxN V
rrrrrI
Reciprocele sunt imediate.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
95
13.2 Fascicul de plane. Stea de plane. Ecuaţia planului determinat de o dreaptă şi un punct ce nu aparţine
dreptei. Distanţa de la un punct la o dreaptă
Definiţia 13.1. Fiind dată o dreaptă d se numeşte fascicul de plane mulţimea tuturor planelor din E3 care conţin dreapta d, numită axa fasciculului.
Fie planele date de ecuaţiile ,:;: 222111 απαπ == NrNrrrrr cu condiţia
,021 VNxNrrr
≠ în acest caz d=21 ππ I .
Fie απ =Nrrr: un plan arbitrar din fascicul, atunci 2211 NNN
rrrλλ += cu
022
21 ≠+ λλ , de unde rezultă:
.02211 =−+ αλλ NrNrrrrr
Fie ( ) drP ∈00r , atunci 0 1 1 0 2 20 0r N a şi r N a− = − =
r rr r , de unde:
( ) ( ) .0221122110 =+−+ λαλαλλ NNrrrr
Dar π face parte din fascicul, de unde:
( ) , deci ,0 221122110 αλαλααλλ +==−+ NNrrrr
care înlocuit dă: ( ) ( ) .0,0 2
22122112211 ≠+=+−+ λλλαλαλλ NNr
rrr Planele 1 2 şi π π care au proprietatea 1 2 dπ π =I se numesc planele de bază
ale fasciculului. În cazul în care planele sunt date prin ecuaţiile generale în coordonate
carteziene, ecuaţia fasciculului devine: ( ) ( ) 02222211111 =+++++++ DzCyBxADzCyBxA λλ
cu 022
21 ≠+ λλ .

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
96
Definiţia 13.2. Fiind dat un plan π se numeşte fascicul de plane paralele mulţimea tuturor planelor din E3 care sunt paralele cu planul .π
Fie ecuaţia vectorială a planului 0: =−απ Nrrr şi 0: 111 =−απ Nr
rr ecuaţia vectorială a unui plan ce face parte din fasciculul de plane paralele, atunci
0,1 ≠= λλNNrr
şi 1λαα ≠ atunci 0: 111 =− λαλπ Nrrr şi 1 , 0,a a−λ = − +μ μ ≠
de unde 1 1: 0r N aπ λ − +μ =rr , adică orice plan din fascicul este de forma:
.0: =+− μαπ Nrrr
Dacă ecuaţia planului este dată sub forma generală în coordonate carteziene, atunci ecuaţia fasciculului de plane este:
.0=++++ μDCzByAx Definiţia 13.3. Se numeşte stea de plane determinată de punctul ( )00 rP r
mulţimea tuturor planelor din E3 care conţin punctul 0.P Fie trei plane date de ecuaţiile lor vectoriale:
3,1,: == iNr iii απrr , cu condiţia ( ) 0321 ≠NxNN
rrr sau prin ecuaţiile lor
generale în coordonate carteziene; 3,1,0: ==+++ iDzCyBxA iiiiiπ , cu condiţia ca:
.3
333
222
111
=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
CBACBACBA
rang
Fie απ =Nrrr: un plan din steaua de plane, deoarece ( ) 0321 ≠NxNN
rrr,
vectorii 3,1, =iNi
r pot forma o bază în E3 şi
332211 NNNNrrrr
λλλ ++= cu ,023
22
21 ≠++ λλλ
care înlocuit în ecuaţia lui ,π dă .332211 αλλλ =++ NrNrNrrrrrrr
Punând condiţia ca ( ) π∈00 rP r avem:
.303202101 αλλλ =++ NrNrNrrrrrrr
de unde: ααλαλαλ =++ 332211
deci ecuaţia stelei de plane este: ( ) ( ) ( ) 0333222111 =−+−+− αλαλαλ NrNrNr
rrrrrr sau în cazul în care planele sunt date prin ecuaţiile generale în coordonate carteziene obţinem:

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
97
( ) ( )( ) 0,0 2
322
2133333
2222211111
≠++=++++
++++++++
λλλλ
λλ
DzCyBxA
DzCyBxADzCyBxA
13.2.1 Ecuaţia planului determinat de o dreaptă şi un punct ce nu aparţine dreptei
Fie dreapta ( ) ( ) drPdrPbaxrd ∈∀∉= 1100 ,,: rrrrr , atunci:
( ) ( )[ ]( )( ) .0:
,0:
00
100
=−−
=−−
baxrrr
axrrrrrrrrr
rrrrr
π
π
În cazul în care dreapta e determinată ca intersecţia a două plane, ecuaţia
planului se determină impunând condiţia ca ecuaţia fasciculului să fie verificată de coordonatele punctului.
13.2.2 Distanţa de la un punct la o dreaptă
( ) [ ] ( ),
2,
22 021010
dPdaPPPaxrr rrrr
=⋅⋅=− σ
de unde:
( ) .,0
0 a
baxrdPd r
rrr−
=

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
98
13.3 Poziţia unei drepte faţă de un plan. Unghiul dintre o dreaptă orientată şi un plan orientat
Fie dreapta d şi planul π date prin ecuaţiile vectoriale απ == Nrbaxrd
rrrrr :,: sau prin ecuaţiile în coordonate carteziene:
⎩⎨⎧
=+++=++
⇔=+⇔=⇔⊂
=+++
−=
−=
−
00
00
0:
:
000
000
DCzByAxCnBmAl
abxNNad
DCzByAxn
zzm
yylxx
d
V
rrrrrr απ
π
Fie ( ) baxrdrP
rrrr=⇒∈ 000 şi .0 α=⋅ Nr
rr
Dacă înmulţim vectorial la stânga cu Nr
penultima relaţie, obţinem ( ) bxNaxrxN
rrrrr=0 , adică ( ) ( ) bxNarNraN
rrrrrrrr=⋅−⋅ 00 , dar 0,aN =
rr iar 0r N = αrr
deci: .0VabxN
rrrr=⋅+α
Celelalte două relaţii fiind evident verificate.
⎩⎨⎧
≠+++=++
⇔≠⋅+=⇔.0
00,0
000 DCzByAxCnBmAl
abxNNad V
rrrrrr απ
Fie ( ) baxrdrPrrrr
=⇒∈ 000 şi 0 .r N ≠ αrr
Procedând ca mai înainte ( ) bxNaxrxNrrrrr
=0 , adică ( ) VaNrbxN 00
rrrrrr=⋅+ dar
0r N ≠ αrr , de unde .0VabxN
rrrr=⋅+α
{ } 00 ≠⋅⇔= NaPdrr
Iπ cu 00 ≠++⇔⋅
⋅+= CnBmAl
aNabxNr rr
rrrr α
ar
ar

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
99
Fie ( ) baxrdrPrrr
Ir
=⇒= 000 π şi 0 .r N = αrr
Procedând ca mai înainte ( ) bxNaxrxNrrrrr
=0 , de unde:
( ) ( )0 0 0 .N b aNa r Nr a N b rN a× + α
− = × ⇒ =⋅
rr rrr r rr r r r rr r
Considerând un punct ( ) drP ∈r şi PprP π=' , atunci ( ) ( )'0 ,,, PPdd =π , unde
( ) ( )Nadrr,
2, μππμ −= , deci ( ) ( )Nad
rr,cos,sin =π , adică:
( ) ( )222222 CBAnm1
CnBm1ANaNaN,acos,dsin
++++
++=
⋅==π rr
rrrr

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
100
CAPITOLUL 14 POZIŢIILE RELATIVE A DOUĂ DREPTE
Problemele legate de poziţiile a două drepte au fost încadrate în patru subcapitole: poziţii relative ale dreptelor, unghiul dintre două drepte orientate, distanţa dintre două drepte paralele şi perpendiculara comună a două drepte în spaţiu.
Obiectivele urmărite au fost însuşirea celor mai eficiente metode de rezolvare al problemelor legate de plane şi drepte.
14.1 Poziţiile relative a două drepte
Considerăm două drepte date prin ecuaţiile vectoriale:
222
111
:
:
baxrd
baxrdrrr
rrr
=
=
sau prin ecuaţiile în coordonate carteziene:
.:
:
2
2
2
2
2
22
1
1
1
1
1
11
nzz
myy
lxxd
nzz
myy
lxxd
−=
−=
−
−=
−=
−
a) .0
0
1
21
1
21
1
21
2
1
2
1
2
1
21
21
21
2121
⎪⎪⎩
⎪⎪⎨
⎧
−=
−=
−
==⇔
⎪⎩
⎪⎨⎧
=
=⇔
⎩⎨⎧
=
=⇔=
nzz
myy
lxx
nn
mm
ll
bxb
axabb
aadd
V
Vrrr
rrr
rr
rr
λ
λ

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
101
Dacă 2121 aadd rr λ=⇒= . Fie ( ) ⇒=∈ 2111 ddrP r
21
221
121
221
111 bbbaxr
baxr
baxr
baxr rrrrr
rrr
rrr
rrr
λλλ
λ=⇒
⎪⎩
⎪⎨⎧
=
=⇒
⎪⎩
⎪⎨⎧
=
=,
deci 1 2 1 2 1 2 1 20 0 ,V Va a şi b b a a şi b b= λ = λ ⇔ × = × =r r r rr rr r r r de unde şi celelalte
condiţii.
b) ( )
.00
0
121
2
1
2
1
2
1
21
21
21
2121
⎪⎩
⎪⎨
⎧
≠−
===⇔
⎪⎩
⎪⎨⎧
≠
=⇔
⎩⎨⎧
≠
=⇔
VV
V
axrr
nn
mm
ll
bxb
axabb
aadd
rrrrrrr
rrr
rr
rr λ
λ
λ
Dacă 2121 aadd rr λ=⇒ Fie ( ) 111 drP ∈
r şi ( ) ⇒∈ 222 drP r
( ) ,021121
221
121
221
111Vbbaxrr
baxr
baxr
baxr
baxr rrrrrrrrr
rrr
rrr
rrr
≠−=−⇒⎪⎩
⎪⎨⎧
=
=⇒
⎪⎩
⎪⎨⎧
⋅=
=λ
λλ
λ
λ
deci 1 2 1 2 1 2 1 20 0 ,V Va a şi b b a a şi b b= λ ≠ λ ⇔ × = × ≠r r r rr rr r r r de unde şi celelalte
condiţii.
c) ( ){ } ,0, 1221210021 =+≠⇔= babaaarPddrrrrrrr
I λ
.12
210 ba
bxbr rr
rrr
⋅=
Dacă ( ){ }⎪⎩
⎪⎨⎧
=
=⇒≠=
.,
220
110210021
baxr
baxraarPdd rrr
rrrrrr
I λ

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
102
Înmulţind scalar la stânga cu 2ar în prima ecuaţie şi cu 1ar în a doua obţinem:
( )( )
.01221
12210
21210 =+⇒⎪⎩
⎪⎨⎧
=−
=baba
abaxar
abaxar rrrrrrrrr
rrrrr
Dacă ecuaţia 0 1 1r a b× =
rr r o înmulţim vectorial cu 2br
la dreapta obţinem:
( ) ( ) .12
21021021120 ba
bxbrbxbrbaabr rr
rrrrrrrrrrr
⋅=⇒=−
d) 1 2,d d - oarecare în spaţiu 21 aa rr λ≠⇔ şi .01221 ≠+ babarrrr
Dacă d1 şi d2 sunt oarecare în spaţiu nu au puncte comune şi 1 2.a a≠ λ
r r
Pentru orice ( ) ( ) 1 1 11 1 1 2 2 2
2 2 2
r a bP r d şi P r d
r a b
⎧ × =⎪∈ ∈ ⇒ ⎨× =⎪⎩
rr rr r
rr r
Procedând ca mai înainte: ( )( )
( )( ) 012212121
12212
21211 ≠+=−⇒⎪⎩
⎪⎨⎧
=−
=⇒ babaaxarr
abaxar
abaxar rrrrrrrrrrrrr
rrrrr
14.2 Unghiul dintre două drepte orientate
Se poate determina din relaţia:
( ) .,cos22
22
22
21
21
21
212121
21
2121
nmlnmlnnmmll
aaaaaa
++⋅++
++=
⋅⋅
= rr
rrrr
1ar

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
103
14.3 Distanţa dintre drepte paralele
Fie dreptele date prin ecuaţiile vectoriale:
222
111
:
:
baxrd
baxrdrrr
rrr
=
=
Considerăm ( ) 111 drP ∈
r şi ( ) 222 drP ∈r şi cum 1 2a a= λ
r r , atunci:
( ) ( )1 1 2 1 2 1, ,a d d d r r a= − ×r r r r
adică: ( )
11 1 2 1 1 2, ,a d d d r x a r x a= −r r r r r
dar: ,, 212222111 baxrbaxrbaxr
rrrrrrrrr λ=⇒== deci:
( ) .,1
2121 a
bbddd r
rrλ−
=
14.4 Perpendiculara comună a două drepte în spaţiu. Distanţa dintre două drepte în spaţiu
Fie două drepte oarecare în spaţiu date prin ecuaţiile vectoriale:
.:
:
2222
1111
baxrd
baxrdrrr
rrr
=
=

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
104
Pentru determinarea perpendicularei comune se poate proceda astfel: prin
dreapta d2 se duce un plan π paralel cu d1. Acest plan se obţine dacă printr-un punct ( ) 222 drP ∈
r , se duce dreapta 1'1 dd . Se proiectează pe planul astfel obţinut
dreapta d1 în 1,d ′′ care intersectează d2 în ( )'1'
1 rP r . Perpendiculara în '1P pe planul π
aparţine planului format de d1 şi ''1d , ea intersectând d1 în ( )11 rP r . Dreapta '
11PP este perpendiculara căutată.
Din ( ) 111111 baxrdrPrrrr
=⇒∈ şi ( ) 222222 baxrdrPrrrr
=⇒∈ . Fie ( ) drP ∈
r , atunci din condiţia ca 1 2,d d şi d să fie coplanare rezultă:
( ) ( )( ) ( )
2
1 1 1 2
2 1 2
0
0.
r r a x a x a
r r a x a x a
− =⎡ ⎤⎣ ⎦
− =⎡ ⎤⎣ ⎦
r r r r r
r r r r r
Deci dreapta d rezultă ca intersecţia a două plane. Pentru a determina distanţa dintre 1 2 ,d şi d
( ) ( ) ( ) ( ) ( )( )( ) ( ).,cos
;,,,
212121212121
2121211121
21
21
rrpraxaaxarraxarr
axarrrrprPdddddd
axa
axa
rrrrrrrrrrrr
rrrrrr
rr
rr
−⋅=−⋅⋅−=
=−−=== ππ
Deci:
( ) ( )( ) ( ) ( )
( ) ( ) ( ) ( )
.
,
21
2112
21
221112
21
221121
21
212211
21
212121
axa
baba
axaaxraaxra
axarxaarxaa
axaaxaraxar
axaaxarr
ddd
rr
rrrr
rr
rrrrrr
rr
rrrrrr
rr
rrrrrr
rr
rrrr
+=
=+
=−
=
=−
=−
=

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
105
CAPITOLUL 15 SFERA
Prezentul capitol este structurat pe şase subcapitole: reprezentări ale sferei, poziţia unei drepte faţă de o sferā, poziţiile unui plan faţă de o sferă, intersecţia a două sfere, fascicul de sfere şi puterea unui punct faţă de o sferă.
Obiectivele urmărite au fost: înţelegerea, însuşirea şi aprofundarea problemelor legate de acest capitol.
Fie E3 spaţiul punctual euclidian tridimensional şi ( ){ }kjirrr
,,;0 un reper cartezian triortogonal orientat pozitiv.
15.1 Reprezentări ale unei sfere
Fie ( ) 30 ErC ∈r şi [ ]∞∈ ,0R . Se numeşte sferă de centru C şi rază R, mulţimea
tuturor punctelor din spaţiu care se află la distanţa R faţă de punctul C, adică mulţimea notată:
{ }RCPEPPS RC =∈= ,3, . Reprezentări implicite:
( )( ) ( ) ( ) 0:
;0:22
02
02
0,
220,
=−−+−+−
=−−
RzzyyxxS
RrrS
RC
RCrr
- reprezintă ecuaţia carteziană implicită; 0: 222
, =++++++ dczbyaxzyxS RC - reprezintă ecuaţia carteziană generală a sferei unde ( )000 ,, zyxC cu:
2,
2,
2 000czbyax −=−=−= , iar .
4
2222 dcbaR −
++=

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
106
Pentru 0: 2222, =−++ RzyxS RC , având reprezentarea parametrică:
[ ] [ ]⎪⎩
⎪⎨
⎧
=∈∈=
=
νπνπν
ν
cos,0,2,0sinsin
sincos:,
RzuuRy
uRxS RC şi
⎪⎩
⎪⎨
⎧
+=+=+=
ννν
cossinsinsincos
:
0
0
0
,
RzzuRyyuRxx
S RC ,
asta deoarece pentru ( ) ( ) CPrrRCSrP +=∈ 0,, rrr , unde:
kRjuRiuRCPrrr
ννν cossinsincossin ++= .
15.2 Poziţiile unei drepte faţă de o sferă
Fie sfera dată prin ( ) 220, : RrrS RC =−rr şi dreapta d dată prin arrd rrr λ+= 1: ,
considerând ( )⎩⎨⎧
+==−arr
Rrrrrr
rr
λ1
220 obţinem:
( ) ( )⎩⎨⎧
+==−−+−+
arrRrrarra
rrr
rrrrrr
λλλ
1
220101
22 02 .
Considerând ( )0rC r , atunci ( ) ( )a
axrrdCd r
rrr01,
−= .
Pentru ecuaţia de gradul II în λ obţinem: ( )[ ] ( ) 222
0122
01 Rarraarr rrrrrrr+−−⋅−=Δ
Ştiind că: ( ) ( )[ ]201
2201
201 arrarraxrr rrrrrrrrr
−−⋅−=− obţinem:
( )[ ].,222 dCdRa −=Δr
Astfel că: ( )( )( )⎪
⎩
⎪⎨
⎧
>⇔<Δ=⇔=Δ<⇔>Δ
sferei. azăintersectenu dreapta ,,0sferei; tangentăeste dreapta ,,0
sferei; secantă este dreapta ,,0
RdCdRdCdRdCd

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
107
15.3 Poziţiile unui plan faţă de o sferă
Fie sfera ( )2 2, 0: 0C RS r r R− − =
r r şi planul : 0,rN aπ − =rr iar distanţa de la
centrul sferei la plan ( ) 0, .r N a
d CN
−π =
rr
r
Dacă ( ) RCd <π, planul intersectează sfera după un cerc; Dacă ( ) RCd =π, planul e tangent la sferă; Dacă ( ) RCd >π, planul nu intersectează sfera. Deci ecuaţiile unui cerc în spaţiu vor fi date de:
( )⎪⎩
⎪⎨⎧
=−
=−−
.0
0220
αNr
Rrrrr
rr
Planul tangent într-un punct ( )11 rM r la sferă este planul care trece prin M1 şi admite ca vector normal pe 1CM .
( )( ) ,0:,02:
011
2200
2,
=−−
=−+−
rrrrRrrrrS RC
rrrr
rrrr
π
sau ( ) ,02: 2
101011 =−++− rrrrrrrr rrrrrrrrπ dar
( ) ,202 220
2101
22010
2111 RrrrrRrrrrSrM −=−⇒=−+−⇒∈
rrrrrrrrr deci

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
108
( ) ,0: 220011 =−++− Rrrrrrr rrrrrrπ
sau ( ) ( ) ( ) 0: 2222
111111 =−++++−+−+−++ Rcbaczzbyyaxxzzyyxxπ dacă 0 .r ai bj ck= + +
rr rr
15.4 Intersecţia a două sfere, unghiul dintre două sfere
Fie sferele: ( )( ) 0:
0:22
22,
21
21,
22
11
=−−
=−−
RrrS
RrrS
RC
RC
rr
rr
⇒ ( )( )⎪⎩
⎪⎨⎧
=−+−+−
=−−
,02
02
122
22
2112
21
22
RRrrrrr
Rrrrrrrr
rr
deci intersecţia a două sfere este un cerc. Considerăm în, cele ce urmează, că .21 RR >
Dacă 211221 RRrrCC +>−=rr sferele sunt exterioare şi cercul lor de
intersecţie este imaginar. Dacă 2112 RRrr +=−
rr sferele sunt tangente exterioare şi cercul lor de intersecţie se reduce la un punct.
Dacă ,211221 RRrrRR +<−<−rr sferele sunt secante.
Dacă 2112 RRrr −=−rr sferele sunt tangente interioare.
Dacă 2112 RRrr −<−rr sferele sunt interioare nesecante.
Dacă 012 =− rr rr sferele sunt concentrice.
Considerând ( ) ( ) 0:,0: 22
22,
21
21, 2211
=−−=−− RrrSRrrS RCRCrrrr şi
2211 ,, RCRC SSM I∈ unghiul celor două sfere este unghiul dintre planele tangente celor două sfere în unul din punctele comune, adică unghiul normalelor la cele două plane.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
109
Astfel, ( ) .
2cos
21
212
22
21
21 RRrrRRMCCrr
−−+=
15.5 Fascicul de sfere
Ecuaţia ( ) ( ) RrSrS ∈=+ λλ ,021rr reprezintă ecuaţia fasciculului de sfere
determinat de cele două sfere, adică toate sferele ce trec prin cercul de intersecţie al celor două sfere.
Prin fiecare punct din spaţiu care nu e comun celor două sfere, trece câte o singură sferă din fascicul.
Cele două sfere, ,, 21 SS care determină fasciculul corespund respectiv lui ∞→= λλ ,0 .
Fie RCS , notată cu ( ) ( ) 0220 =−−= RrrrS rrr şi planul π de ecuaţie:
( ) .0=−= αNrrPrrr
Toate sferele care trec prin cercul de intersecţie dintre sfera RCS , şi planul π sunt date de ecuaţia ( ) ( ) RrPrS ∈=+ λλ ,0rr care reprezintă ecuaţia fasciculului
de sfere determinat de sfera RCS , şi planul π.
15.6 Puterea unui punct faţă de o sferă
Fie ( )11 rM r şi ( ) ( ) 0: 220, =−−= RrrrSS RCrrr . Dacă o dreaptă variabilă d care
trece prin punctul 1M intersectează sfera în punctele M ′ şi ,M ′′ atunci:
( )( ).1"
1'
1 MKMMMM rS rρ==⋅

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
110
Constanta K ce intervine în relaţia precedentă se numeşte puterea punctului
1M faţă de sfera RCS , .
Astfel, ( )( ) ( ) .221
22011 RCMRrrMrS −=−−=rr
rρ Planul radical al sferelor
2211 ,, , RCRC SS este mulţimea tuturor punctelor din spaţiul E3 care au aceeaşi putere faţă de ele, plan perpendicular pe dreapta:
( ).2121 CCCC ≠ Ecuaţia planului radical al celor două sfere este:
( ) ( ) ( ) .002: 212
122
22
2112 =−⇔=−+−+− rSrSRRrrrrrr
rrrrrrrrπ
Considerând trei sfere 332211 ,,, ,, RCRCRC SSS ale căror centre sunt necoliniare,
planele lor radicale (considerate câte două) trec prin aceeaşi dreaptă, numită axa radicală a celor trei sfere care este perpendiculară pe planul determinat de cele trei centre. Axa radicală e formată din toate punctele care au aceeaşi putere faţă de cele trei sfere.
Ecuaţiile axei radicale sunt ( ) ( )( ) ( )⎩
⎨⎧
=−=−
.00
31
21
rSrSrSrSrr
rr
Dându-se patru sfere ale căror centre sunt necoplanare, există un singur punct care are aceeaşi putere faţă de cele patru sfere. El se află pe axa radicală a trei dintre sfere şi în planul radical al celei de-a patra sfere cu una din celelalte trei sfere.
Deci ( )P rr este dat ( ) ( )( ) ( )( ) ( )⎪
⎩
⎪⎨
⎧
=−=−=−
.000
41
31
21
rSrSrSrSrSrS
rr
rr
rr
CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
111
CAPITOLUL 16 ELEMENTE DE TRIGONOMETRIE SFERICĂ
Trigonometria sferică a apărut şi s-a dezvoltat mai întâi în ţările Orientului antic. Dezvoltarea cunoştinţelor de astronomie a contribuit la apariţia şi dezvoltarea trigonometriei sferice din care, ca un caz particular, s-a dezvoltat şi trigonometria plană.
Părinte al trigonometriei sferice şi plane este considerat astronomul grec Hipparc, de la Şcoala din Alexandria (180 – 125 î.e.n.). Merite importante în dezvoltarea trigonometriei au şi matematicienii greci: Teodosiu (secolul al II lea î.e.n.), Menelau din Alexandria (sec. II – I î.e.n.), Ptolemeu Claudiu (sec. II î.e.n.).
Ulterior, trigonometria sferică s-a dezvoltat la hinduşi şi în mod deosebit la arabi şi alte popoare din Asia. Între învăţaţii acestor popoare se numără Al Battanii (850 – 930) care lucrează în jurul anului 900 la Observatorul oraşului Rei, în apropiere de Teheran. Într-o problemă, el obţinu-se o relaţie, care numai formal se deosebeşte de una din cele mai importante teoreme ale trigonometriei sferice, şi anume, teorema cosinusurilor, care va fi apreciată după merit de Regiomontanus.
Mai amintim pe Abu - I – Vafa (940 – 998) şi pe Nasir-ed-Din (1201 – 1274) care în cartea sa “Tratat despre patrulater”, sintetizează rezultatele lucrărilor din domeniul trigonometriei sferice şi plane de până la el.
Mai târziu, trigonometria sferică a fost dezvoltată de Regiomontanus (1435 – 1476), Tycho Brahe (1546 – 1601), Kepler (1571 – 1630) şi alţii.
Descoperirea logaritmilor, stabilirea proprietăţilor lor, întocmirea tabelelor de valori naturale ale funcţiilor trigonometrice şi a tabelelor de logaritmi pentru funcţiile trigonometrice, duc la transformarea calculelor din trigonometria sferică şi dau eleganţă şi simplitate formulelor ei.
Trigonometria sferică, aşa cum este cunoscută astăzi, se datorează oamenilor de ştiinţă ai secolelor XVIII şi XIX: Euler, Lobacevski, Moebius, Gauss, Lagrange.
Euler Leonhard (1707 – 1783) s-a ocupat în mod special de trigonometria sferică în două articole mari, abordând-o din puncte de vedere diferite. În primul (1755) el a construit într-un mod cu totul general trigonometria sferică ca geometrie a triunghiurilor formate pe suprafaţa sferei din linii de distanţă minimă. În al doilea (1779) Euler adoptă o bază elementară pentru a construi sistemul formulelor ei. El pleacă de la un triedru pe care îl intersectează cu plane corespunzătoare pentru a putea aplica apoi teoremele trigonometriei plane (ca şi Copernic). Astfel el a dedus teorema sinusurilor, teorema cosinusului pentru laturi şi o formulă nouă care leagă între ele cinci elemente; relevând că aceste trei formule conţin întreaga trigonometrie sferică. A treia ecuaţie pe care a obţinut-o este supusă unor transformări multiple. El deduce din ea aşa-numita formulă a
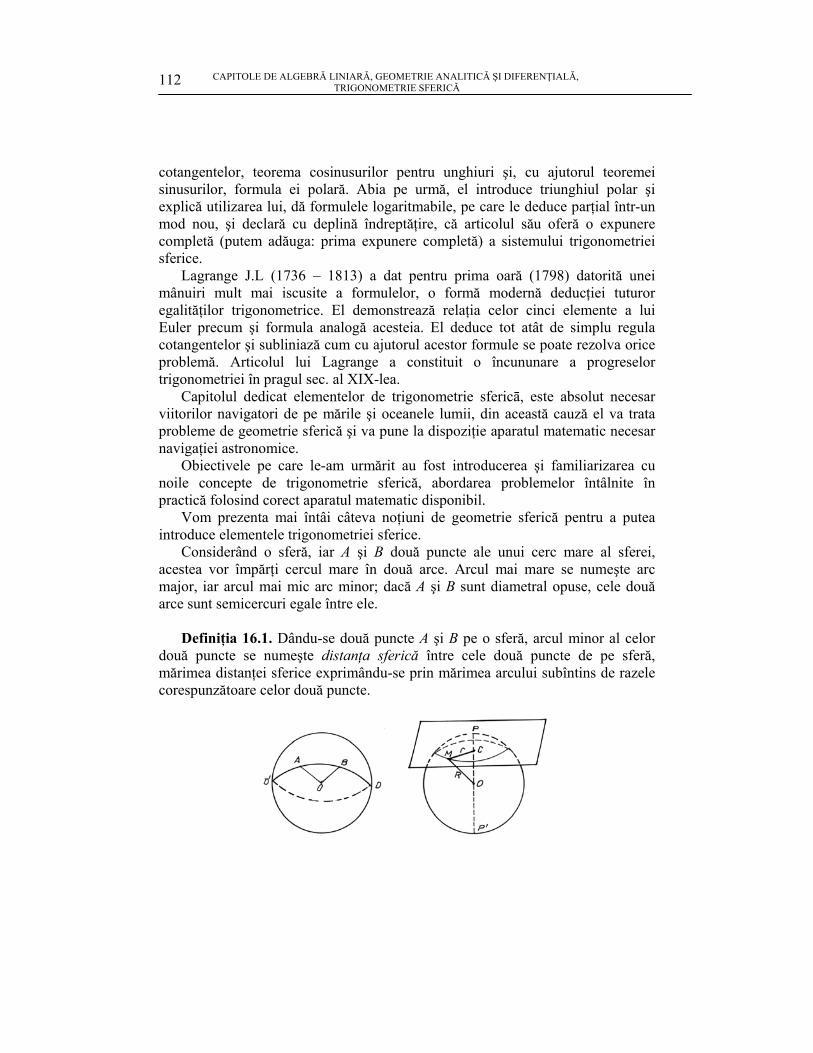
CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
112
cotangentelor, teorema cosinusurilor pentru unghiuri şi, cu ajutorul teoremei sinusurilor, formula ei polară. Abia pe urmă, el introduce triunghiul polar şi explică utilizarea lui, dă formulele logaritmabile, pe care le deduce parţial într-un mod nou, şi declară cu deplină îndreptăţire, că articolul său oferă o expunere completă (putem adăuga: prima expunere completă) a sistemului trigonometriei sferice.
Lagrange J.L (1736 – 1813) a dat pentru prima oară (1798) datorită unei mânuiri mult mai iscusite a formulelor, o formă modernă deducţiei tuturor egalităţilor trigonometrice. El demonstrează relaţia celor cinci elemente a lui Euler precum şi formula analogă acesteia. El deduce tot atât de simplu regula cotangentelor şi subliniază cum cu ajutorul acestor formule se poate rezolva orice problemă. Articolul lui Lagrange a constituit o încununare a progreselor trigonometriei în pragul sec. al XIX-lea.
Capitolul dedicat elementelor de trigonometrie sfericā, este absolut necesar viitorilor navigatori de pe mările şi oceanele lumii, din această cauză el va trata probleme de geometrie sferică şi va pune la dispoziţie aparatul matematic necesar navigaţiei astronomice.
Obiectivele pe care le-am urmărit au fost introducerea şi familiarizarea cu noile concepte de trigonometrie sferică, abordarea problemelor întâlnite în practică folosind corect aparatul matematic disponibil.
Vom prezenta mai întâi câteva noţiuni de geometrie sferică pentru a putea introduce elementele trigonometriei sferice.
Considerând o sferă, iar A şi B două puncte ale unui cerc mare al sferei, acestea vor împărţi cercul mare în două arce. Arcul mai mare se numeşte arc major, iar arcul mai mic arc minor; dacă A şi B sunt diametral opuse, cele două arce sunt semicercuri egale între ele.
Definiţia 16.1. Dându-se două puncte A şi B pe o sferă, arcul minor al celor
două puncte se numeşte distanţa sferică între cele două puncte de pe sferă, mărimea distanţei sferice exprimându-se prin mărimea arcului subîntins de razele corespunzătoare celor două puncte.
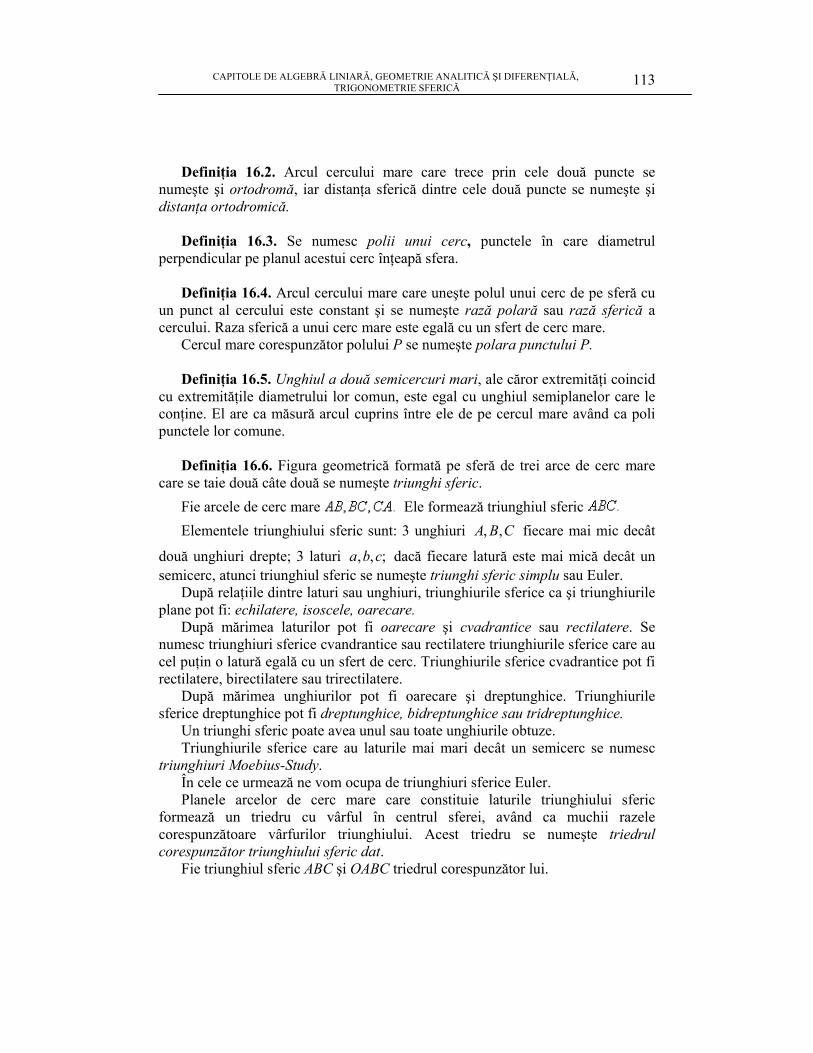
CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
113
Definiţia 16.2. Arcul cercului mare care trece prin cele două puncte se numeşte şi ortodromă, iar distanţa sferică dintre cele două puncte se numeşte şi distanţa ortodromică.
Definiţia 16.3. Se numesc polii unui cerc, punctele în care diametrul
perpendicular pe planul acestui cerc înţeapă sfera. Definiţia 16.4. Arcul cercului mare care uneşte polul unui cerc de pe sferă cu
un punct al cercului este constant şi se numeşte rază polară sau rază sferică a cercului. Raza sferică a unui cerc mare este egală cu un sfert de cerc mare.
Cercul mare corespunzător polului P se numeşte polara punctului P. Definiţia 16.5. Unghiul a două semicercuri mari, ale căror extremităţi coincid
cu extremităţile diametrului lor comun, este egal cu unghiul semiplanelor care le conţine. El are ca măsură arcul cuprins între ele de pe cercul mare având ca poli punctele lor comune.
Definiţia 16.6. Figura geometrică formată pe sferă de trei arce de cerc mare
care se taie două câte două se numeşte triunghi sferic. Fie arcele de cerc mare Ele formează triunghiul sferic Elementele triunghiului sferic sunt: 3 unghiuri , ,A B C fiecare mai mic decât
două unghiuri drepte; 3 laturi , , ;a b c dacă fiecare latură este mai mică decât un semicerc, atunci triunghiul sferic se numeşte triunghi sferic simplu sau Euler.
După relaţiile dintre laturi sau unghiuri, triunghiurile sferice ca şi triunghiurile plane pot fi: echilatere, isoscele, oarecare.
După mărimea laturilor pot fi oarecare şi cvadrantice sau rectilatere. Se numesc triunghiuri sferice cvandrantice sau rectilatere triunghiurile sferice care au cel puţin o latură egală cu un sfert de cerc. Triunghiurile sferice cvadrantice pot fi rectilatere, birectilatere sau trirectilatere.
După mărimea unghiurilor pot fi oarecare şi dreptunghice. Triunghiurile sferice dreptunghice pot fi dreptunghice, bidreptunghice sau tridreptunghice.
Un triunghi sferic poate avea unul sau toate unghiurile obtuze. Triunghiurile sferice care au laturile mai mari decât un semicerc se numesc
triunghiuri Moebius-Study. În cele ce urmează ne vom ocupa de triunghiuri sferice Euler. Planele arcelor de cerc mare care constituie laturile triunghiului sferic
formează un triedru cu vârful în centrul sferei, având ca muchii razele corespunzătoare vârfurilor triunghiului. Acest triedru se numeşte triedrul corespunzător triunghiului sferic dat.
Fie triunghiul sferic ABC şi OABC triedrul corespunzător lui.
CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
114
Feţele triedrului AOB, BOC, COA sunt unghiurile la centru corespunzătoare laturilor AB, BC, CA.
Diedrele triedrului au unghiurile plane egale cu unghiurile A,B,C ale triunghiului sferic.
Scopul trigonometriei sferice este de a rezolva triunghiurile sferice, adică de a
calcula elementele necunoscute atunci când se cunosc trei elemente oarecare ale unui triunghi sferic (aceasta rezultând din cazurile de congruenţă ale triunghiurilor sferice). Rezultă că trigonometria sferică trebuie să stabilească relaţiile care leagă între ele patru elemente oarecare ale triunghiului sferic şi că între cele 6 elemente ale triunghiului sferic se vor obţine:
4 26 6 15 ,C C formule= =
care rezolvă 6 probleme principale ale trigonometriei. Acestea se împart în două grupe: Grupa I
1. Sunt date 3 laturi a,b,c; 2. Sunt date 2 laturi şi unghiul cuprins între ele; 3. Sunt date 2 laturi şi unghiul opus uneia din ele.
Cu aceste 3 probleme şi cu ajutorul triunghiului sferic polar se rezolvă şi celelalte 3 probleme principale:
Grupa II 4. Sunt date 3 unghiuri; 5. Sunt date o latură şi 2 unghiuri alăturate; 6. Sunt date 2 unghiuri şi latura opusă unuia din ele.
Se vor distinge deci 15 formule care conţin relaţii între trei laturi şi un unghi, între două laturi şi două unghiuri, între trei unghiuri şi o latură.
La baza formulelor din trigonometria sferică stă o formulă care se consideră fundamentală şi din care, prin transformări analitice, se pot obţine şi celelalte.
Matematicianul arab Al-Battanii a dat ca formulă fundamentală relaţia care leagă trei laturi şi un unghi, numită ''formula cosinusului unei laturi.''

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
115
Teorema 16.1. Într-un triunghi sferic, cosinusul unei laturi este egal cu produsul cosinusurilor celorlalte două laturi mărit cu produsul sinusurilor lor prin cosinusul unghiului cuprins între ele (opus primei laturi).
.cossinsincoscoscos Acbcba += Demonstraţie. Stabilirea vectorială a formulei fundamentale este extrem de
simplă. Fie triunghiul sferic ABC pe sfera de rază R = 1 şi OABC triedrul
corespunzător. Să calculăm produsul multiplu de vectori:
( ) ( ) ( )[ ]( ) ( )[ ]( ) ( ) ( ),
2 OBxOAOCxOAOCxOBOA
OBOAxOCOAOBxOCOAOBxOAxOCOAOCxOAOBxOA
⋅−⋅=
=⋅−⋅⋅==⋅=⋅
unde .sin,sin bOCxOAcOBxOA ==
Unghiul format de feţele b şi c este A şi 12 =OA .cos,cos,cos cOBOAbOCOAaOCOB =⋅=⋅=⋅
Rezultă: cbaAbc coscoscoscossinsin ⋅−=⋅⋅ , deci: ;cossinsincoscoscos Acbcba ⋅+⋅=
prin permutări circulare obţinem şi:
.cossinsincoscoscos;cossinsincoscoscos
CbabacBacacb
⋅+⋅=⋅+⋅= (16.1)
Definiţia 16.7. Fie ABC un triunghi sferic, A′ polul cercului mare BC, situat
în aceeaşi emisferă cu ,A B′ polul cercului mare AC situat în aceeaşi emisferă cu ,B C′ polul cercului mare AB situat în aceeaşi emisferă cu C. Triunghiul sferic
A B C′ ′ ′ astfel format se numeşte triunghi sferic polar al triunghiului sferic ABC sau triunghiul sferic suplimentar.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
116
Triedrele OABC şi OA B C′ ′ ′ fiind suplimentare între feţele şi diedrele lor avem relaţiile:
.22
'''
'''
drcCbBaAdrcCbBaA
=+=+=+
=+=+=+
Teorema 16.2. Într-un triunghi sferic cosinusul unui unghi este egal cu
produsul sinusurilor celorlalte două unghiuri prin cosinusul laturii opuse primului unghi micşorat cu produsul cosinusurilor celorlalte două unghiuri.
.cossinsincoscoscos aCBCBA +−=
Demonstraţie. Această formulă se poate obţine uşor aplicând formula fundamentală triunghiului sferic polar.
Deci '''''' cossinsincoscoscos Acbcba += , dar:
.180,180,180,180,180,180
''
''
''
cCCcbBBbaAAa
−=−=
−=−=
−=−=
oo
oo
oo
Înlocuind în relaţia de mai înainte obţinem: ( ) ( ) ( )
( ) ( ) ( ).180cos180sin180sin 180cos180cos180cos
aCBCBA
−−−+
+−−=−ooo
ooo
Deci: aCBCBA cossinsincoscoscos −=−
sau .cossinsincoscoscos aCBCBA +−= Prin permutări circulare obţinem:
.cossinsincoscoscos,cossinsincoscoscos
cBABACbACACB
+−=+−= (16.2)
Teorema 16.3. Sinusurile unghiurilor sunt proporţionale cu sinusurile laturilor
opuse lor:

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
117
cC
bB
aA
sinsin
sinsin
sinsin
== (formula sinusurilor).
Demonstraţie. Calculând produsul multiplu vectorial,
( ) ( ) ( )[ ] ( )[ ]( )[ ] ( )[ ] . OAOCxOBOAOAOBxOAOC
OCOAOBxOAOAOCOBxOAOCxOAOBxOA⋅⋅=⋅⋅=
=⋅⋅−⋅⋅=⋅
Cum cOBxOA sin= considerând triunghiul sferic ABC pe sfera de rază 1=R şi OABC triedrul la centru corespunzător.
Apoi bOCxOA sin= .
Unghiul format de b şi c este A, iar 1=OA , deci vom putea scrie că:
( )OCxOBOAAcb ⋅=sinsinsin , deoarece:
( )[ ] ( ) ( ).OCxOBOAOAOCxOBOAOAOCxOBOA ⋅=⋅⋅=⋅⋅ Prin permutări circulare vom obţine
( ) ( )OCxOBOACbaOCxOBOABac ⋅=⋅= sinsinsin,sinsinsin de unde:
,sinsinsinsinsinsinsinsinsin CbaBacAcb == şi, împărţind cu cba sinsinsin obţinem:
cC
bB
aA
sinsin
sinsin
sinsin
== (16.3)
Teorema 16.4. Între cinci elemente ale unui triunghi sferic avem relaţia dată
de ''formula celor cinci elemente'': AbccbBa cossincossincoscossin −=
Demonstraţie. Din formula fundamentală a trigonometriei sferice:
,cossinsincoscoscos Bcacab += înlocuind ,cossinsincoscoscos Acbcba += obţinem :
BcaAccbcbb coscossincoscossinsincoscoscos 2 ++= sau
( ) ( )BaAcbccb cossincoscossinsincos1cos 2 +=− sau
BaAcbcb cossincoscossinsincos += sau
.coscossinsincoscossin AcbcbBa −=

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
118
Prin permutări circulare obţinem:
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
−=−=−=−=−=
.cossincossincoscossin,cossincossincoscossin,cossincossincoscossin,cossincossincoscossin,cossincossincoscossin
CbaabBcCabbaAcBcaacCbBaccaAbAcbbcCa
(16.4)
Teorema 16.5. Între cinci elemente ale unui triunghi sferic avem relaţia dată
de formula produsului sinusului unghiului prin cosinusul laturii alăturate: .cossincossincoscossin aBCCBbA +=
Demonstraţie. Această relaţie se stabileşte cu uşurinţă aplicând formula celor
cinci elemente triunghiului sferic polar celui dat: ''''''' cossincossincoscossin AbccbBa −= ,
dar aAa −== oo 180,180 '' , înlocuind, obţinem: .cossincossincoscossin aBCCBbA −−=−
Înmulţind cu -1 obţinem: .cossincossincoscossin aBCCBbA += (16.5)
Asemănător vom obţine prin permutări circulare încă cinci astfel de formule: sin cos cos sin cos sin cossin cos cos sin cos sin cossin cos cos sin cos sin cossin cos cos sin cos sin cossin cos cos sin cos sin cos
A c C B B C aB a A C C A bB c C A A C bC a A B B A cC b B A A B c
= + ⎫⎪= + ⎪⎪= + ⎬⎪= +⎪
= + ⎪⎭
(16.6)
Grupul de formule: cos cos cos sin sin cossin cos cos sin cos sin cossin sin sin sin
a b c b c Aa B b c c b Aa B B A
= += −=
(16.7)
formează grupul lui Gauss. Acest grup de formule este general şi poate fi aplicat oricărui triunghi sferic.
În geometria analitică în spaţiu se demonstrează că aceste formule exprimă o schimbare a axelor de coordonate în cazul rotaţiei lor în jurul uneia din ele.
A doua formulă din grupul lui Gauss este folosită sub forma unei relaţii între 4 elemente consecutive ale unui triunghi sferic sau “formula cotangentelor”.
Între patru elemente consecutive ale unui triunghi sferic avem relaţia dată de formula cotangentelor
sin cos cos sinctgb c c A ActgB= +

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
119
Teorema 16.6. Produsul cotangentei laturii extreme prin sinusul laturii de mijloc este egal cu produsul cosinusului laturii de la mijloc prin cosinusul unghiului cuprins între ele mărit cu produsul sinusului unghiului de la mijloc prin cotangenta unghiului opus primei laturi.
Demonstraţie Pentru a stabili această grupă de formule împărţim parte cu
parte ultimele două formule din grupa lui Gauss sin cos cos sin cos sin cossin sin sin sin
a B b c c b Aa B b A
= −=
şi obţinem: sin coscossin sin
c ActgB ctgb cA A
= −
sau sin sin cos cosctgB A c ctgb A c= −
sau sin cos cos sin ,ctgb c c A ActgB= +
prin permutări circulare obţinem şi: sin cos cos sinsin cos cos sinsin cos cos sinsin cos cos sinsin cos cos sin
ctga b b C CctgActga c c B BctgActgb a a C CctgBctgc a a B BctgCctgc b b A ActgC
= + ⎫⎪= + ⎪⎪= + ⎬⎪= +⎪
= + ⎪⎭
(16.8)
Între patru elemente ale triunghiului sferic am obţinut 15 formule grupate în patru grupe astfel:
cos cos cos sin sin coscos cos cos sin sin coscos cos cos sin sin cos
a b c b c AI b c a c a B
c a b a b C
= +⎧⎪ = +⎨⎪ = +⎩
cos cos cos sin sin coscos cos cos sin sin coscos cos cos sin sin cos
A B C B C aII B C A C A b
C A B A B c
= − +⎧⎪ = − +⎨⎪ = − +⎩
sin sin sinsin sin sin
A B CIIIa b c= =

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
120
sin cos cos sinsin cos cos sinsin cos cos sinsin cos cos sinsin cos cos sinsin cos cos sin
ctga b b C C ctgActga c c B B ctgActgb c c A Actgb
IVctgb a a C C ctgBctgc a a B B ctgCctgc b b A ActgC
= +⎧⎪ = +⎪
= +⎪⎨ = +⎪⎪ = +⎪
= +⎩
Observaţie 16.1. Grupele formate nu sunt calculabile prin logaritmi cu
excepţia grupei a III-a , formula sinusurilor. Deci rezolvarea triunghiurilor sferice va trebui să fie precedată de transformarea acestor formule în formule calculabile prin logaritmi.
În formulele stabilite, laturile şi unghiurile triunghiului sferic intră întregi - aceste formule se numesc formule de speţa I.
Transformând formulele de speţa I în formule calculabile prin logaritmi, obţinem formule în care intră semilaturile şi semiunghiurile triunghiurilor sferice; aceste formule se numesc de speţa a II -a.
În formula: Acbcba cossinsincoscoscos +=
înlocuind pe 2
sin21cos 2 AA −= , obţinem:
( )2
sinsinsin2sinsincoscoscos 2 Acbcbcba −+=
sau ( )
cbacbA
sinsincoscos
2sin2 2 −−
=
cb
cbacbaA
sinsin2
sin2
sin
2sin2 2
+−−+
=
Notând pcba 2=++ şi ştiind că triunghiurile sunt Euler:
( ) ( )
( ) ( )
( ) ( )⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
−−=
−−=
−−=
babpapC
cacpapB
cbcpbpA
sinsinsinsin
2sin
sinsinsinsin
2sin
sinsinsinsin
2sin
(formula sinusului semiunghiului) (16.9)

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
121
Dacă în aceeaşi formulă 12
cos2cos 2 −=AA , obţinem:
( ) ,sinsin2
cos2coscos
,sinsin2
cos2sinsincoscoscos
2
2
cbAcba
cbAcbcba
++=
+−=
sau ( )cb
cbasinsin
coscoscos2 2 +−=
cb
acbcbaA
sinsin2
sin2
sin
2cos2
−+++
=
de unde analog: ( )
( )
( )⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
−=
−=
−=
bacppC
cabppB
cbappA
sinsinsinsin
2cos
sinsinsinsin
2cos
sinsinsinsin
2cos
(formula cosinusului semiunghiului) (16.10)
Observaţia 16.2. Formulele sunt analoge cu cele din trigonometria plană. Făcând raportul dintre formulele (16.9) şi (16.10) se obţine:
( ) ( )( )
( ) ( )( )
( ) ( )( )
sin sin2 sin sin
sin sin2 sin sin
sin sin2 sin sin
p b p cAtgp p a
p c p aBtgp p b
p a p bCtgp p c
⎫− −= ⎪
− ⎪⎪
− − ⎪= ⎬− ⎪⎪
− − ⎪= ⎪− ⎭
(16.11)
Aplicând formulele (16.9), (16.10) şi (16.11) triunghiului sferic polar, se obţin:
CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
122
( ) ( )
( )
( ) ( )( )
sin sinsin
2 sin sin
sin sincos
2 sin sin
sin sin2 sin sin
p b p cAb c
p p aAb c
p b p cAtgp p a
′ ′ ′ ′− −′=
′ ′
′ ′ ′−′=
′ ′
′ ′ ′ ′− −′=
′ ′ ′−
Dar: 180 180 180180 180 180
A a B b C ca A b B c C
′ ′ ′= − = − = −
′ ′ ′= − = − = −
o o o
o o o
şi notând 2 540 2 2A B C P a b c P p′ ′ ′ ′+ + = + + = − =o rezultă: 270p P′ = −o
şi succesiv:
( )( )( )
90
90
90
p a P A
p b P B
p c P C
′ ′− = − −
′ ′− = − −
′ ′− = − −
o
o
o
înlocuind mai sus, avem: ( )
( )
( )
cos cossin
2 sin sin
cos cossin
2 sin sin
cos cossin
2 sin sin
P P AaB C
P P BbC A
P P CcA B
⎫− −= ⎪
⎪⎪
− − ⎪= ⎬⎪⎪− − ⎪=⎪⎭
(16.12)
analog: ( ) ( )
( ) ( )
( ) ( )
cos coscos
2 sin sin
cos cos2 sin sin
cos coscos
2 sin sin
P B P CaB C
P C P AbcosC A
P A P BcA B
⎫− −= ⎪
⎪⎪
− − ⎪= ⎬⎪⎪− − ⎪=⎪⎭
(16.13)
analog:

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
123
( )( ) ( )
( )( ) ( )
( )( ) ( )
cos cos2 cos cos
cos cos2 cos cos
cos cos2 cos cos
P P AatgP B P C
P P BbtgP C P A
P P CctgP A P B
⎫− −= ⎪
− − ⎪⎪
− − ⎪= ⎬− − ⎪⎪
− − ⎪= ⎪− − ⎭
(16.14)
Dar se ştie că 180 2A B C+ + − = εo - excesul sferic al triunghiului sferic ABC
şi se exprimă în unităţi de unghi. Expresia excesului sferic este 21802
SR
ε = ⋅π
oo
unde S este aria triunghiului sferic. Prin urmare 90P = + εo de asemenea:
( )( )( )
90
90
90
P A A
P B B
P C C
− = − − ε
− = − − ε
− = − − ε
o
o
o
Înlocuind în formulele de mai sus obţinem: ( )
( )
( )
sin sinsin
2 sin sin
sin sinsin
2 sin sin
sin sinsin
2 sin sin
AaB C
BbA C
CcA B
⎫ε − ε= ⎪
⎪⎪
ε − ε ⎪= ⎬⎪⎪ε − ε ⎪=⎪⎭
(16.15)
( ) ( )
( ) ( )
( ) ( )
sin sincos
2 sin sin
sin sincos
2 sin sin
sin sincos
2 sin sin
B CaB C
A CbA C
A BcA B
⎫− ε − ε= ⎪
⎪⎪
− ε − ε ⎪= ⎬⎪⎪− ε − ε ⎪=⎪⎭
(16.16)
CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
124
( )( ) ( )
( )( ) ( )
( )( ) ( )
sin sin2 sin sin
sin sin2 sin sin
sin sin2 sin sin
AatgB C
BbtgA C
CctgA B
⎫ε − ε= ⎪
− ε − ε ⎪⎪
ε − ε ⎪= ⎬− ε − ε ⎪⎪
ε − ε ⎪= ⎪− ε − ε ⎭
(16.17)
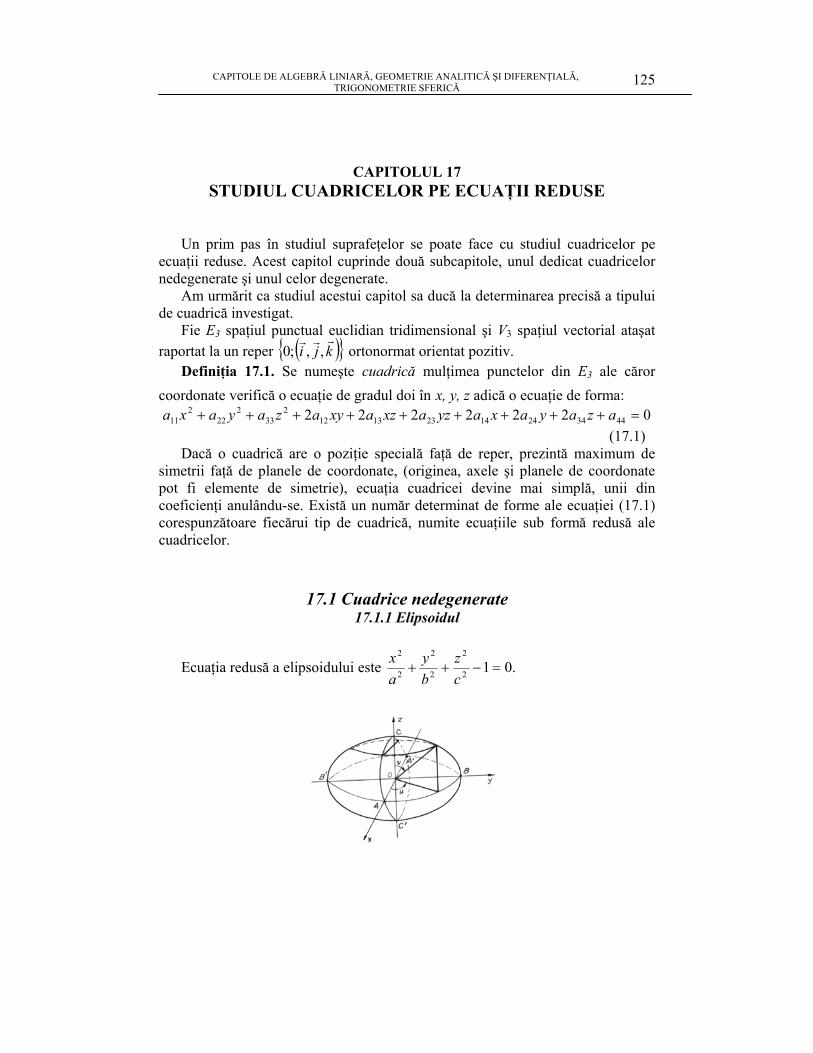
CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
125
CAPITOLUL 17 STUDIUL CUADRICELOR PE ECUAŢII REDUSE
Un prim pas în studiul suprafeţelor se poate face cu studiul cuadricelor pe ecuaţii reduse. Acest capitol cuprinde două subcapitole, unul dedicat cuadricelor nedegenerate şi unul celor degenerate.
Am urmărit ca studiul acestui capitol sa ducă la determinarea precisă a tipului de cuadrică investigat.
Fie E3 spaţiul punctual euclidian tridimensional şi V3 spaţiul vectorial ataşat raportat la un reper ( ){ }kji
rrr,,;0 ortonormat orientat pozitiv.
Definiţia 17.1. Se numeşte cuadrică mulţimea punctelor din E3 ale căror coordonate verifică o ecuaţie de gradul doi în x, y, z adică o ecuaţie de forma:
0222222 443424142313122
332
222
11 =+++++++++ azayaxayzaxzaxyazayaxa (17.1)
Dacă o cuadrică are o poziţie specială faţă de reper, prezintă maximum de simetrii faţă de planele de coordonate, (originea, axele şi planele de coordonate pot fi elemente de simetrie), ecuaţia cuadricei devine mai simplă, unii din coeficienţi anulându-se. Există un număr determinat de forme ale ecuaţiei (17.1) corespunzătoare fiecărui tip de cuadrică, numite ecuaţiile sub formă redusă ale cuadricelor.
17.1 Cuadrice nedegenerate 17.1.1 Elipsoidul
Ecuaţia redusă a elipsoidului este .012
2
2
2
2
2
=−++cz
by
ax

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
126
Punctele de intersecţie cu axele, numite vârfurile suprafeţei le determinăm din:
( ) ( )0,0,,0,0,00
: ' aAaAzy
Ox −⇒⎩⎨⎧
==
I
( ) ( )cCcCyx
Oz −⇒⎩⎨⎧
==
,0,0,,0,000
: 'I
( ) ( )0,,0,0,,000
: ' bBbBzx
Oy −⇒⎩⎨⎧
==
I
Curbele de intersecţie cu planele de coordonate:
( ) ,010: 2
2
2
2
=−+⇒=by
axzxOyI elipsă reală situată în planul xOy,
( ) ,010: 2
2
2
2
=−+⇒=cz
axyxOzI elipsă reală situată în planul xOz,
( ) ,010: 2
2
2
2
=−+⇒=cz
byxyOzI elipsă reală situată în planul yOz.
Elipsoidul este o suprafaţă închisă situată într-un paralelipiped dreptunghic, ale cărui feţe sunt tangente elipsoidului în vârfurile lui.
Numerele a, b, c se numesc semiaxele elipsoidului. Dacă ,a b b c= = sau ,a c= elipsoidul e de rotaţie (în jurul axei ).zz′K Dacă ,a b c= = elipsoidul e o
sferă cu centrul în O şi de rază a. Elipsoidul este o suprafaţă generată de o familie de elipse care se sprijină pe o
elipsă fixă, adică de familia:
⎪⎩
⎪⎨⎧
=
=+
μ
λγ μλ
xcz
by
2
2
2
2
, : şi elipsa ⎪⎩
⎪⎨⎧
=
=−+
0
01: 2
2
2
2
zby
ax
γ
Ecuaţiile parametrice ale elipsoidului sunt:
⎪⎩
⎪⎨
⎧
===
ννν
cossinsinsincos
czubyuax
unde [ ] [ )πνπ ,0,2,0 ∈∈u .

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
127
17.1.2 Hiperboloidul cu o pânză
După poziţia suprafeţei faţa de axele de coordonate, ecuaţia hiperboloidului cu o pânză are una din formele:
012
2
2
2
2
2
=−−+cz
by
ax
012
2
2
2
2
2
=−+−cz
by
ax
012
2
2
2
2
2
=−++−cz
by
ax .
Reperul în raport cu care e scrisă ecuaţia are centrul, axele şi planele de
coordonate elemente de simetrie ale cuadricei. Punctele de intersecţie cu axele:
( ) ( )0,0,,0,0,00
: ' aAaAzy
Ox −⇒⎩⎨⎧
==
I
( ) ( )0,,0,0,,000
: ' bBbBzx
Oy −⇒⎩⎨⎧
==
I
Curbele de intersecţie cu planele de coordonate:
( ) ,010: 2
2
2
2
=−+⇒=by
axzxOyI elipsă colier,
( ) ,010: 2
2
2
2
=−+⇒=cz
axyxOzI hiperbolă,
( ) ,010: 2
2
2
2
=−+⇒=cz
byxyOzI hiperbolă.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
128
Numerele a, b, c se numesc semiaxe. Dacă ,a b= hiperboloidul cu o pânză se numeşte de rotaţie în jurul axei Oz.
Ecuaţia 02
2
2
2
2
2
=−+cz
by
ax defineşte conul asimptotic al hiperboloidului cu o
pânză.
Hiperboloidul cu o pânză e generat de familia de elipse ,λ μγ care se sprijină pe hiperbola γ:
⎪⎩
⎪⎨⎧
=
=+
μ
λγ μλ
zby
ax
2
2
2
2
, : ; ⎪⎩
⎪⎨⎧
=
=−−
0
01: 2
2
2
2
ycz
ax
γ
Ecuaţiile parametrice ale hiperboloidului cu o pânză sunt
⎪⎩
⎪⎨
⎧
===
.,sin
cos
cshuzchubychuax
νν
[ ] Ru∈∈ ,,0 πν
Din studiul secţiunilor făcute în hiperboloidul cu o pânză cu plane paralele cu planele de coordonate se obţin elipse reale, nedegenerate şi hiperbole, unele din hiperbole degenerând în drepte reale concurente. Aceste drepte sunt generatoare rectilinii pe care le putem determina:
.11
101 2
2
2
2
2
2
2
2
2
2
2
2
⎟⎠⎞
⎜⎝⎛ −⎟⎠⎞
⎜⎝⎛ +=⎟
⎠⎞
⎜⎝⎛ +⎟⎠⎞
⎜⎝⎛ −⇔
⇔−=−⇔=−−+
by
by
cz
ax
cz
ax
by
cz
ax
cz
by
ax
Deci, pe hiperboloidul cu o pânză, sunt situate două familii de generatoare rectilinii.
⎪⎪⎩
⎪⎪⎨
⎧
⎟⎠⎞
⎜⎝⎛ −=−
⎟⎠⎞
⎜⎝⎛ +=+
by
cz
ax
by
cz
ax
G11
1:
λ
λ
λ , şi
⎪⎪⎩
⎪⎪⎨
⎧
⎟⎠⎞
⎜⎝⎛ +=−
⎟⎠⎞
⎜⎝⎛ −=+
by
cz
ax
by
cz
ax
G11
1:
μ
μ
μ
Prin fiecare punct al hiperboloidului cu o pânză trece câte o generatoare din fiecare familie.
Două generatoare din aceeaşi familie nu se întâlnesc. Orice generatoare dintr-o familie întâlneşte toate generatoarele celeilalte familii.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
129
17.1.3 Hiperboloidul cu două pânze
Se numeşte hiperboloid cu două pânze suprafaţa a cărei ecuaţie are una din formele:
012
2
2
2
2
2
=−+−−cz
by
ax
012
2
2
2
2
2
=−−+−cz
by
ax
012
2
2
2
2
2
=−−−cz
by
ax .
Punctele de intersecţie cu axele de coordonate:
( ) ( )cCcCyx
Oz −⇒⎩⎨⎧
==
,0,0,,0,000
: 'I
Curbele de intersecţie cu planele de coordonate:
( ) ,010: 2
2
2
2
=++⇒=by
axzxOyI elipsă imaginară,
( ) ,010: 2
2
2
2
=−+−⇒=cz
axyxOzI hiperbolă,
( ) ,010: 2
2
2
2
=−+−⇒=cz
byxyOzI hiperbolă.
Dacă ,a b= hiperboloidul cu două pânze este de rotaţie în jurul axei 'zz . Hiperboloidul cu două pânze este o suprafaţă generată de familia de elipse:
⎪⎩
⎪⎨⎧
=
=+
μ
λγ μλ
zby
ax
2
2
2
2
, :
care se sprijină pe hiperbola fixă:

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
130
⎪⎩
⎪⎨⎧
=
=+−
0
01: 2
2
2
2
ycz
ax
γ
Ecuaţiile parametrice ale hiperboloidului cu două pânze:
⎪⎩
⎪⎨
⎧
===
.,ν
νν
cchuchzbshyashuchx
Ru ∈ν,
17.1.4 Paraboloidul eliptic
După poziţia suprafeţei faţă de axele de coordonate, ecuaţia redusă a paraboloidului eliptic are una din formele:
zby
ax ε22
2
2
2
=−
xcz
by ε22
2
2
2
=+
1,22
2
2
2
±==+ εεycz
ax .
Singurul punct de intersecţie cu axele de coordonate este ( )0,0,0O . Curbele de intersecţie cu planele de coordonate: ( ) ( )0,0,00: OzxOy ⇒=I ( ) zaxyxOz 22 20: =⇒=I parabolă cu axă de simetrie axa zz’, ( ) zbyxyOz 22 20: =⇒=I parabolă cu axă de simetrie axa xx’.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
131
Dacă ,a b= atunci paraboloidul eliptic este de rotaţie în jurul axei . Paraboloidul eliptic este o suprafaţă generată de familia de elipse:
⎪⎩
⎪⎨⎧
=
=+
μ
λγ μλ
zby
ax
2
2
2
2
, : care se sprijină pe parabola fixă
⎪⎩
⎪⎨⎧
=
=
0
2: 2
2
y
zax
γ
Ecuaţiile parametrice ale paraboloidului eliptic:
[ ]⎪⎪
⎩
⎪⎪
⎨
⎧
∈=
∈==
Ruuz
buyaux
,2
2,0,sincos
2
πννν
17.1.5 Paraboloidul hiperbolic
Ecuaţia redusă a paraboloidului hiperbolic are una din formele:
zby
ax ε22
2
2
2
=−
xcz
by ε22
2
2
2
=−
1,22
2
2
2
±==− εεycz
ax .
Suprafaţa intersectează axele numai în origine.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
132
Curbele de intersecţie cu planele de coordonate:
( ) xabyzxOy ±=⇒= 0:I , două drepte,
( ) zaxyxOz 22 20: ε=⇒=I parabolă,
( ) zbyxyOz 22 20: ε−=⇒=I parabolă . Pentru a determina forma mai exactă a suprafeţei, se fac secţiuni paralele cu
planele de coordonate. Pentru 1,ε = se obţine simetrie faţă de ( )xOy ca în figură. Paraboloidul hiperbolic e generat de o familie de parabole:
⎪⎩
⎪⎨⎧
=
=+−
μ
λγ μλ
x
zby 2: 2
2
, care se sprijină pe parabola fixă
⎪⎩
⎪⎨⎧
=
=
0
2: 2
2
y
zax
γ
Ecuaţiile parametrice ale paraboloidului hiperbolic sunt:
⎪⎪
⎩
⎪⎪
⎨
⎧
∈=
==
Rucuz
shubychuax
νν
νν
,,21 2
Generatoarele rectilinii ale paraboloidului hiperbolic sunt: 2
:
x y za bgx ya b
λ
⎧ + =⎪⎪ λ⎨⎪ − = λ⎪⎩
⎪⎪⎩
⎪⎪⎨
⎧
=−
=+
μ
μ
μ zby
ax
by
ax
g2
:
Toate generatoarele din aceeaşi familie gλ sunt paralele cu acelaşi plan de
ecuaţie 0,x ya b− = iar generatoarele din familia gμ sunt paralele cu planul de
ecuaţie 0.x ya b+ = Prin orice punct al paraboloidului trece câte o singură
generatoare din fiecare familie. Două generatoare din aceeaşi familie nu sunt concurente.
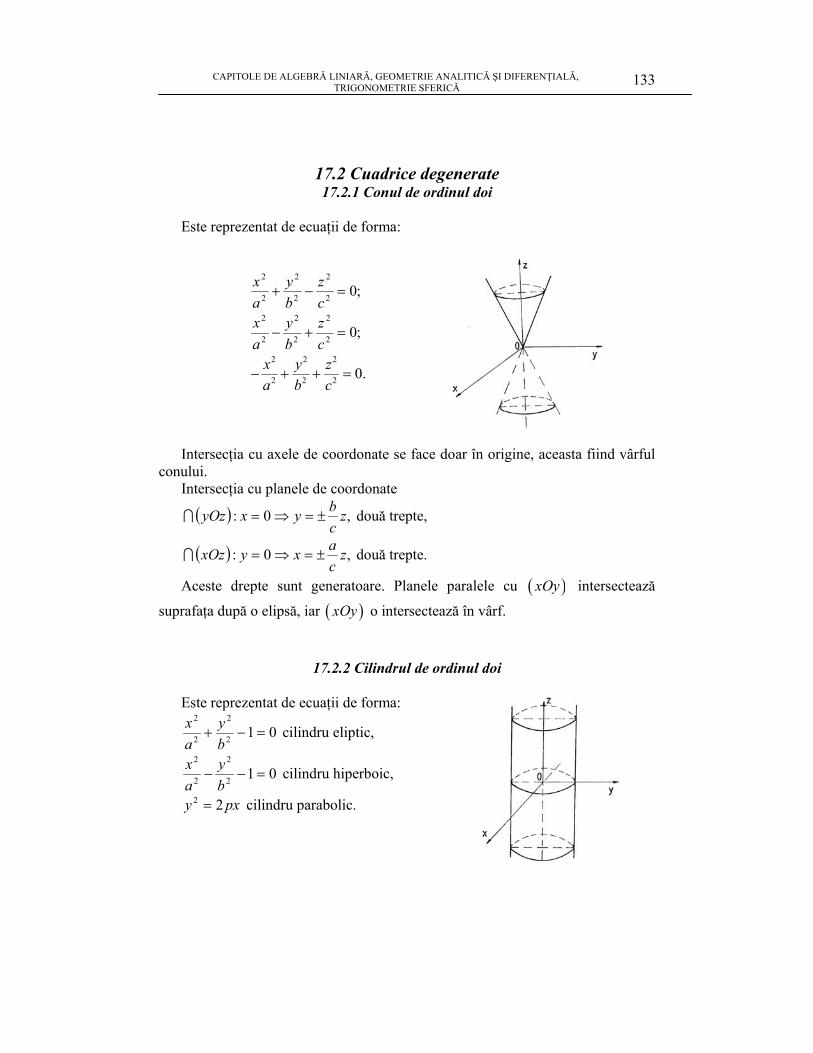
CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
133
17.2 Cuadrice degenerate 17.2.1 Conul de ordinul doi
Este reprezentat de ecuaţii de forma:
;02
2
2
2
2
2
=−+cz
by
ax
;02
2
2
2
2
2
=+−cz
by
ax
2 2 2
2 2 2 0.x y za b c
− + + =
Intersecţia cu axele de coordonate se face doar în origine, aceasta fiind vârful
conului. Intersecţia cu planele de coordonate
( ) ,0: zcbyxyOz ±=⇒=I două trepte,
( ) ,0: zcaxyxOz ±=⇒=I două trepte.
Aceste drepte sunt generatoare. Planele paralele cu ( )xOy intersectează
suprafaţa după o elipsă, iar ( )xOy o intersectează în vârf.
17.2.2 Cilindrul de ordinul doi
Este reprezentat de ecuaţii de forma:
012
2
2
2
=−+by
ax cilindru eliptic,
012
2
2
2
=−−by
ax cilindru hiperboic,
pxy 22 = cilindru parabolic.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
134
Trebuie amintite şi:
• perechea de plane secante reprezentate de ecuaţia 2 2
2 2 0,x ya b
− = şi
similarele obţinute prin permutări circulare; • perechea de plane paralele 2 2 0x a− = şi similarele obţinute prin permutări circulare; • perechea de plane confundate 2 0x = şi similarele;
• dreapta dublă 2 2
2 2 0,x ya b
+ = reprezintă axa Oz şi similarele;
• punctul origine: 2 2 2
2 2 2 0;x y za b c
+ + =
• mulţimea vidă: 2 2 2
2 2 2 1 0x y za b c
+ + + = (elipsoid imaginar)
sau 2 2
2 2 1 0x ya b
+ + = (cilindru eliptic imaginar)
sau 2 2 0x a+ = (plane paralele imaginare). Intersecţia unei cuadrice dată prin ecuaţia redusă cu un plan este o conică ce
poate fi reală, degenerată sau imaginară. Planul format din toate tangentele, în acelaşi punct, la curbele de pe suprafaţa,
ce trece prin punctul respectiv se numeşte planul tangent la suprafaţă în acel punct.
Planul tangent în punctul ( )0000 ,, zyxM de pe cuadrică se obţine prin dedublarea ecuaţiei cuadricei.
Astfel, pentru cuadrice cu centru:

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
135
1,01: 2
2'
2
2
2
2
±==−++∑ εεεcz
by
ax
planul tangent: .1,01: 20'
20
20 ±==−++ εεεπ
czz
byy
axx
t
Pentru cuadrice fără centru:
∑ =+ zby
ax '
2
2
2
2
2: εε
planul tangent: ( ) .1,: 0'
20
2
20 ±=+=+ εεεπ zz
byy
axx
t
Perpendiculara pe planul tangent în punctul de contact se numeşte normala la suprafaţă în acel punct.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
136
CAPITOLUL 18 STUDIUL CUADRICELOR PE ECUAŢII GENERALE
Acest capitol tratează cuadricele plecând de la ecuaţiile lor generale şi este
structurat pe trei subcapitole: ecuaţia cuadricei şi poziţia unei drepte faţă de o cuadrică, centrul de simetrie al cuadricei, planul său diametral şi direcţii conjugate, planul de simetrie, direcţiile principale ale cuadricei şi planul tangent la o cuadrică într-un punct.
Obiectivele urmărite au fost cele de determinare şi recunoaştere a elementelor caracteristice ale unei cuadrice folosind reprezentarea sub formă matricială a acestora.
18.1 Ecuaţia cuadricei. Poziţia unei drepte faţă de o cuadrică Cuadrica sau suprafaţa de ordinul doi este suprafaţa a cărei ecuaţie sub formă
implicită în coordonate carteziene în raport cu un reper ( ){ }kjiRrrr
,,;0= este dată
printr-o funcţie polinomială de gradul doi în x, y, z adică: ( )
,0222 222,,:
44342414
2313122
332
222
11
=++++
++++++=∑azayaxa
yzaxzaxyazayaxazyxF
care se mai poate scrie sub formă matricială:
( ) ( ) ,02: 44342414
332313
232212
131211
=+⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛+
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
∑ azyx
aaazyx
aaaaaaaaa
xyz
sau, introducând notaţiile: [ ] ( ), ,
Br xi yj zk B r cu B i j k= + + = =
r rr r r rr r
,:
332313
232212
131211
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
aaaaaaaaa
A unde AAt =
şi 14 24 34 ,B
b a i a j a k B b⎡ ⎤= + + = ⎣ ⎦r r rr r
putem scrie:
[ ] [ ] [ ] 44: 2 0,t tB B BB
r A r b r a⎡ ⎤∑ + + =⎣ ⎦rr r r
deci membrul stâng al ecuaţiei unei cuadrice este o sumă dintre o formă pătratică, o formă liniară şi o constantă.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
137
În cazul unei translaţii, trecând de la reperul ( ){ }kjiRrrr
,,;0= la reperul ( ){ }''''' ,,;0 kjiR
rrr= în care 0
'00 rr= , avem rrr rrr+= 0
' şi în această situaţie:
[ ] [ ] [ ]0 0 0 44: 2 0,t tB B BB
r r A r r b r r a⎡ ⎤∑ + + + + + =⎣ ⎦rr r r r r r
de unde: [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ] ,022
:
440
0000
=+++
++++∑arbrb
rArrArrArrAr
BBBBt
Bt
Bt
BBt
BBt
Bt
Bt
rrrr
rrrrrrrr
sau [ ] [ ] [ ] [ ]( )[ ] [ ] [ ] [ ] [ ] ,022: 440000 =+++++∑ arbrArrbArrAr BB
tBB
tBB
tB
tBB
t rrrrrrrrr
de unde rezultă că matricea formei pătratice, A, este invariantă la o translaţie.
Fie acum cuadrica Σ dată prin ecuaţia: [ ] [ ] [ ] 44: 2 0t t
B B BBr A r b r a⎡ ⎤∑ + + =⎣ ⎦
rr r r
şi dreapta d dată prin ecuaţia: .,: 0 Rarrd ∈+= λλrrr
Pentru a studia poziţia dreptei faţă de cuadrică, vom considera sistemul format din cele două ecuaţii, acestea fiind echivalente cu ecuaţia:
[ ] [ ]( ) [ ]( )[ ] [ ] [ ] [ ]20 0 0 0 442 2 0.t t t t
B B B B B B BB Ba A a r A b a r A r b r a⎡ ⎤ ⎡ ⎤λ + + λ + + + =⎣ ⎦ ⎣ ⎦
r rr r r r r r r
Introducând notaţiile: [ ] [ ][ ] [ ]( )[ ][ ] [ ] [ ] [ ] 44000
0
2:
:
:
arbrAr
abAr
aAa
Bbt
BBt
BBtt
Bbt
++=
+=
=
rrrr
rrr
rr
γ
β
α
obţinem: .022 =++ γβλαλ Dacă 0≠α , atunci ecuaţia de mai sus este o ecuaţie de gradul II în λ, pentru
care .2 αγβ −=Δ

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
138
Pentru { }1 2 1 20 : ,d P P P PΔ > ⇒ ∑ = ≠I adică dreapta este secantă pentru cuadrică.
Pentru { }1 2 1 20 : ,d P P P PΔ = ⇒ ∑ = =I - dreapta e tangentă la cuadrică. Pentru 00 =Σ⇒<Δ Id - dreapta nu intersectează cuadrica. Definiţia 18.2. Direcţiile ar pentru care [ ] [ ] 0== αBB
t aAa rr se numesc direcţii asimptotice în raport cu cuadrica.
Dacă { }10,0 Pd =Σ⇒≠= Iβα , dreapta intersectează cuadrica într-un punct, fără a fi tangentă.
Dacă 0,0 == βα şi ( )( )Σ∉≠ 000 rP rγ atunci ecuaţia de gradul II este incompatibilă, este cazul asimptotelor la hiperbole.
Dacă 0,0 == βα şi ( )( )Σ∈= 000 rP rγ atunci ecuaţia de gradul II este compatibilă nedeterminată şi e verificată pentru orice R∈λ şi acum ( ) Σ∈00 rP r înseamnă că dd =ΣI adică d este generatoare rectilinie a cuadricei sau cuadrica admite generatoare rectilinii.
18.2 Centrul de simetrie al cuadricei. Plan diametral şi direcţii conjugate
Dacă ( )00 rP r este centru de simetrie al cuadricei, atunci dreapta d intersectează
cuadrica Σ în două puncte ( )1 1P rr şi ( )2 2P rr cu 1 20 ,
2r rr +
=r r
r iar pentru 1 0 1r r a= + λr r r
şi ( )2 0 2 1 2 0r r a a= + λ ⇒ λ + λ =r r r r de unde 1 2 0.λ + λ = Deci, dacă 00 =⇒≠ βα ,
de unde [ ] [ ] 00 =+ BB brArr . Dacă ,0det ≠A atunci [ ] [ ]BB bAr
rr 10
−−= , adică avem de-a face cu o cuadrică cu centru unic. Deci, cuadrica cu centru e caracterizată de det 0.A ≠
Teorema 18.1. Locul geometric al mijloacelor coardelor cuadricei Σ paralele
cu direcţia 0Va ≠r este o porţiune din planul π de ecuaţie:
[ ]( )[ ] [ ] [ ] .0: =+ BBt
BBt barAa
rrrrπ Planul π se numeşte planul diametral al lui ∑ conjugat direcţiei .ar

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
139
Demonstraţie. Dacă ( )00 rP r este mijlocul coardei cuadricei având vectorul director ,ar atunci extremităţile ( )11 rP r şi ( )22 rP r ale acestei coarde se află la distanţe egale de 0P în sensuri contrare. De aceea, adică de unde:
[ ] [ ]( )[ ] ,0: =+= BBt
Bt abAr rrrβ
în care ar este dat. Mulţimea punctelor ( )rP r care verifică ecuaţia 0=β este: [ ]( ) [ ] [ ] 0=+ BB
tb
t abAr rrr sau transpunând [ ] [ ] [ ] [ ] .0=+ BBt
BBt barAa
rrrr Consecinţă. Matricea A transformă vectorul ar director al coardelor în vector
normal al planului diametral cuadricei Σ. Definiţia 18.3. Intersecţia a două plane diametrale ale lui Σ conjugate cu două
direcţii 1ar şi ( )2 1 2 0Va a a× ≠r r r se numeşte diametru.
18.3 Plan de simetrie şi direcţiile principale ale cuadricei. Planul tangent la o cuadrică într-un punct
Planul de simetrie al cuadricei este planul diametral perpendicular pe direcţia
coardelor. Astfel, dacă ar este vectorul director al coardelor conjugate cu planul de simetrie, vectorul normal la planul de simetrie va fi coliniar cu vectorul ar adică [ ] [ ]BB aaA rr λ= şi, prin urmare, vectorul normal la planul de simetrie al cuadricei este vector propriu al matricei A. Direcţiile perpendiculare planelor de simetrie ale cuadricei se numesc direcţiile principale ale cuadricei.
Dacă ( ) Σ∈00 rP r , atunci [ ] [ ] [ ]0 0 0 442 0t tB B BB
r A r b r a⎡ ⎤γ = + + =⎣ ⎦rr r r şi ecuaţia de
gradul II în λ devine 022 =+ βλαλ , care are o rădăcină egală cu zero. Pentru ca dreapta arrd rrr λ+= 0: să fie tangentă la cuadrică, atunci şi a doua
rădăcină a ecuaţiei de mai sus trebuie să fie tot zero. Deci 021 =+ λλ , de unde şi 0=β adică [ ] [ ]( )[ ] 00 =+ BB
tB
t abAr rrr şi cum
0 ,r r a− = λr r r atunci [ ] [ ]( )[ ] 000 =−+ BB
tB
t rrbAr rrrr sau:
[ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] 00000 =−+− BBt
BBt
BBt
BBt rbrbrArrAr rrrrrrrr
care adunat cu 0γ = ne dă:
[ ] [ ] [ ]0 0 44 0t tB B BB
r A r b r r a⎡ ⎤+ + + =⎣ ⎦rr r r r .

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
140
Aceasta este ecuaţia planului tangent în ( ) Σ∈00 rP r şi este forma dedublată a ecuaţiei cuadricei.
Deoarece matricea A este reală şi simetrică, valorile proprii ( )3,1, =iiλ ale polinomului caracteristic al transformării sunt reale, iar vectorii proprii sunt ortogonali, putem construi o bază ortonormată, astfel încât matricea A să fie diagonală, iar diagonala principală să fie formată din valori proprii.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
141
CAPITOLUL 19 NOŢIUNI INTRODUCTIVE ÎN GEOMETRIA DIFERENŢIALĂ. TRIEDRUL LUI FRENET
Geometria s-a impus ca un ansamblu coerent de abstracţiuni ale relaţiilor materiale, sintetizând multe proprietăţi obţinute prin observaţie directă şi verificate prin experiment. Devenită ştiinţă raţională încă la grecii din antichitate, geometria a descris până la Riemann şi Lobacevski un univers incolor, inodor, fără forţe, omogen (toate punctele jucând acelaşi rol) şi izotrop (fără direcţii privilegiate). Fizica modernă a pus problema înţelegerii de fond a conceptului de spaţiu, propunând şi asimilând modele geometrice tot mai complexe. Geometria nefiind totuşi un capitol de fizică, este necesar un studiu riguros, pe baze intuitive dar şi prin raţionamente deductiv imateriale, al configuraţiilor geometrice, în pas cu progresele algebrei şi analizei. Mult timp, prin geometrie s-a înţeles geometria lui Euclid în plan şi în spaţiu şi este comod să urmărim evoluţia conceptelor geometrice folosind exemplul acestei vechi şi foarte particulare discipline matematice.
Geometria s-a dezvoltat în legătură cu înţelegerea tipurilor de interacţiuni din universul fizic, prin elaborarea conceptului de varietate, generalizând deopotrivă curbele şi suprafeţele. Curbele au apărut prin modelarea traiectoriilor, iar suprafeţele ca frontiere ale corpurilor.
În acest context să precizăm faptul ca acest capitol dedicat studiului curbelor este structurat pe trei subcapitole, unul legat de curbe definite prin ecuaţii vectoriale şi parametrice, al doilea tratează curbele definite prin ecuaţii carteziene implicite iar cel de-al treilea prezintă triedrul lui Frenet.
Obiectivele au fost cele de recunoaştere a diverselor tipuri de reprezentări ale curbelor pe formarea deprinderii de construcţie a unui reper Frenet intr-un anume punct al unei curbe.
Funcţiile care participă în reprezentările analitice ale suprafeţelor şi curbelor sunt de următoarele tipuri:
a) ;3,1,: =→ pRRf p b) .3,1,: =→ mEEq mp Prin intermediul unei baze, studiul celui de-al doilea tip se reduce la primul
tip. De exemplu, pentru .3,1,:,332211 =→++= iRRqeqeqeqq p
irrr
Înainte de a intra în studiul propriu-zis al curbelor şi suprafeţelor, vom recapitula câteva noţiuni legate de funcţii derivabile şi diferenţiabile.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
142
O funcţie de tipul a) este diferenţiabilă într-un punct dacă admite derivate parţiale continue în acel punct, iar funcţia de tipul b) este diferenţiabilă dacă sunt diferenţiabile coordonatele sale.
Definiţia 19.1. O funcţie RRXf n →⊂: este derivabilă în raport cu
variabila kx în punctul ( ) Xaaaa n ∈= ,,, 21 K dacă: ( ) ( )
kk
nkkknkkk
ax axaaaaaafaaxaaaf
kk −− +−+−
→
,,,,,,,,,,,,,,lim 11211121 KKKK
există şi este finită. Limita însăşi se numeşte derivata parţială a funcţiei f în raport cu kx în punctul ( )naaa ,,, 21 K şi se notează ( )nx aaaf
k,,, 21 K sau
( )k
n
xaaaf
∂∂ ,,, 21 K
Definiţia 19.2. Fie o funcţie vectorială de variabilă vectorială:
( ).,,,,: 21 mmn ffffRRXf K=→⊂
Dacă RRXf ni →⊂: este derivabilă parţial în raport cu fiecare variabilă în
punctul ( ) Xaaaa n ∈= ,,, 21 K atunci f este derivabilă parţial în
( ) Xaaaa n ∈= ,,, 21 K şi 1 2, , , .m
k k k k
f f f fx x x x
⎛ ⎞∂ ∂ ∂ ∂= ⎜ ⎟∂ ∂ ∂ ∂⎝ ⎠
K
Definiţia 19.3. Fie ( Δ→⊆Δ→ ,:: mpmp EEfEEf o mulţime deschisă).
Matricea următoare se numeşte matricea Jacobi ataşată funcţiei f sau matricea jacobian
( )
⎟⎟⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=
p
mmm
p
p
xf
xf
xf
xf
xf
xf
xf
xf
xf
fJ
L
M
L
L
21
2
2
2
1
2
1
2
1
1
1
Dacă ,p m= atunci ( )fJdet se numeşte jacobianul funcţiei f.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
143
19.1 Curbe definite prin ecuaţii vectoriale şi parametrice
Definiţia 19.4. Fiind dată o funcţie diferenţiabilă nRIr →: se numeşte curbă în nR mulţimea ( ){ }trPItRP n =∈∃∈=Γ , sau echivalent:
( ){ }., trOPItRP n r=∈∃∈=Γ
Ecuaţia ( ) ,r r t t I= ∈r r se numeşte ecuaţia vectorială a curbei ,Γ iar ecuaţiile
( ) ( ) ( ) Ittxxtxxtxx nn ∈=== ,,,, 2211 K se numesc ecuaţiile parametrice ale curbei .Γ
Definiţia 19.5. Un punct ( )IrP∈ se numeşte simplu dacă există o singură
valoare It∈ astfel încât ( ) Ptr = . Dacă există mai multe valori distincte
nttt ,,, 21 K astfel încât ( ) ( ) ( ) PtrPtrPtr n === ,,, 21 K , atunci P se numeşte punct multiplu de ordinul n.
Definiţia 19.6. O funcţie diferenţiabilă şi injectivă defineşte o curbă simplă. Observaţie:
1. O curbă simplă e formată numai din puncte simple. 2. Dacă numai una din funcţiile ( )txi este injectivă, atunci rt este curbă simplă.
Definiţia 19.7. O funcţie diferenţiabilă [ ] nRbar →,: pentru care ( ) ( )brar =
se numeşte curbă închisă.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
144
Definiţia 19.8. O curbă închisă pentru care restricţia la [ ),a b este injectivă se numeşte curbă simplă şi închisă.
Definiţia 19.9. Fie o curbă Γ dată prin ecuaţia vectorială ( ) , ,r r t t I= ∈
r r iar ( )trP = şi ( ) IhtthtrQ ∈++= ,, două puncte pe .Γ Se numeşte derivata funcţiei
vectoriale rr în P la Γ limita
( ) ( ) ( ) .limlim00 h
PQh
trhtrtrhh →→
=−+
=rr
r
Dacă ( )trr există şi ( ) 0' ≠trr , atunci ( )tr 'r este un vector situat pe tangenta la Γ în P şi se numeşte vector viteză în punctul P, sensul său fiind sensul creşterii parametrului t.
Faţă de reperul canonic al lui ( ){ }in eE r;0, , avem
( ) ( ) ( ) ( ) .'2
'21
'1
'nn etxetxetxtr r
Krrr
+++= Definiţia 19.10. Un punct ( )trP = al curbei Γ se numeşte punct regulat dacă
( ) 0' ≠trr în acest punct. Dacă ( ) Ittr ∈∀≠ ,0'r , atunci curba Γ se numeşte curbă regulată. Definiţia 19.11. Dacă P este un punct regulat al curbei ,Γ dreapta care trece
prin P şi are ca vector director pe ( )trr se numeşte tangenta la Γ în punctul P. Ecuaţia tangentei: ( ) ( ) RtrtrRT ∈+= λλ ,: 'rrr
sau ( )
( )( )
( )( )
( ) .: ''2
22'1
11
txtxX
txtxX
txtxXT
n
nn −==−
=−
K
Prima ecuaţie se numeşte ecuaţia vectorială a tangentei, iar cea de-a doua se numeşte ecuaţia scalară.
Q

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
145
Cazuri particulare:
- în ( )( )
( )( ) ;:, ''
2
tytyY
txtxXTR −=
−
- în ( )( )
( )( )
( )( )
3' ' ', : .
X x t Y y t Z z tR T
x t y t z t− − −
= =
Definiţia 19.12. Hiperplanul care trece prin P şi are drept vector normal pe
( )tr 'r se numeşte hiperplanul normal la curba Γ în P. Ecuaţia hiperplanului normal este:
( )( ) ( ) 0: ' =⋅− trtrRN rrr
sau ( )[ ] ( ) ( )[ ] ( ) ( )[ ] ( ) .0: ''
222'111 =−++−+− txtxXtxtxXtxtxXN nnnK
Cazuri particulare: În R2 hiperplanul normal se reduce la o dreaptă care trece prin P şi este
perpendiculară pe ( ) :r t′r
( )[ ] ( ) ( )[ ] ( ) .0: '' =−+− tytyYtxtxXN
În R3 hiperplanul este un plan ce trece prin P şi este perpendicular pe ( ) :r t′r
( )[ ] ( ) ( )[ ] ( ) ( )[ ] ( ) .0: ''' =−+−+− tztzZtytyYtxtxXN Definiţia 19.13. Un punct ( ) Γ∈= trP corespunzător unei anumite valori a lui
t pentru care ( ) 0' =trr se numeşte punct singular pentru .Γ Dacă 1>∃m astfel încât ( ) ( ) ( ) ( )1 0mr t r t r t−′ ′′= = = =
r r rK şi ( ) ( ) 0,mr t ≠
r atunci P se numeşte punct singular de ordin m.
În vecinătatea unui punct singular de ordin m dezvoltarea cu ajutorul formulei lui Taylor a funcţiei rr este:

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
146
( ) ( ) ( ) ( ) ( ) , , ,!
mmhr t h r t r t h t h I
m⎡ ⎤+ = + + ε ∈⎣ ⎦
rr r r
cu ( ) .0lim0
=→
hh
εr
Dacă notăm ( )trP = şi ( )htrQ += atunci: ( ) ( )
( )( ).!lim!lim
00
mtmhmh
rhPOm
htrhtrm r
rr==
−+→→
Vectorii ( ) OPtr =r şi ( ) OQhtr =+
r au originea în O, iar vectorii
( ) ( )Krr ,, ''' trtr au originea în P (extremitatea lui ( )r tr ). Definiţia 19.14. Vectorul ( ) ( )mr tr se numeşte vector tangent la Γ în punctul
singular P de ordinul m. Dreapta determinată de punctul singular P şi vectorul ( ) ( )mr tr se numeşte
tangenta la Γ în punctul singular de ordinul m.
Hiperplanul care trece prin P şi are ca vector normal pe ( ) ( )mr tr se numeşte
hiperplanul normal la Γ în P. Astfel, ecuaţia tangentei va fi:
( ) ( ) ( ) RtrtrRT m ∈+= λλ ,: rrr
sau ( )
( )( )( )
( )( )( )
( )( ) .:2
22
1
11
txtxX
txtxX
txtxXT m
n
nnmm
−==
−=
−K
iar ecuaţia hiperplanului normal va fi: ( )( ) ( ) ( ) 0: =⋅− trtrRN mrrr
sau
( )[ ] ( )( ) ( )[ ] ( )( ) ( )[ ] ( )( ) .0: 222111 =−++−+− txtxXtxtxXtxtxXN mnnn
mm K
19.2 Curbe definite prin ecuaţii carteziene implicite
Fie funcţiile diferenţiabile RRgf →3:, . Mulţimea ( ) ( ) ( ){ }3, , , , , , ,C x y z f x y z a g x y z b= ∈ = =R se numeşte
mulţimea de ecuaţii carteziene implicite ( ) ( ) .,,,,, bzyxgazyxf ==

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
147
Definiţia 19.15. Un punct al mulţimii C se numeşte punct regulat dacă în acel
punct cel puţin unul din determinanţii funcţionali ( )( )
( )( )
( )( )
, , ,, ,
, , ,D f g D f g D f gD y z D z x D x y
este nenul. Deci, se numeşte punct regulat al mulţimii C un punct în care matricea
funcţională
( )⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=
zg
yg
xg
zf
yf
xf
gfJ ,
are rangul doi. b) Un punct al mulţimii C în care rang ( ) 2, <gfJ se numeşte punct singular
sau punct critic al mulţimii C. Teorema 19.1. Dacă 0 0 0 0( , , )M x y z este un punct regulat al mulţimii
( ) ( ) ( ){ }3, , , , , , , ,C x y z f x y z a g x y z b= ∈ = =R atunci există o vecinătate a
acestui punct în care ecuaţiile ( ) azyxf =,, şi ( ) bzyxg =,, definesc o curbă regulată simplă.
Demonstraţie. Prin ipoteză 0 0 0 0( , , )M x y z C∈ este un punct regulat, deci cel
puţin un minor de ordinul doi al matricei ( )gfJ , este nenul în M0. Fie de exemplu:
( )( ) ( ) 0,,
,,
000 ≠zyxzyDgfD .
Pe baza teoremei funcţiilor implicite rezultă că sistemul ( )( )⎩
⎨⎧
==
bzyxgazyxf
,,,,
defineşte două funcţii diferenţiabile ( )xyx → şi ( )xzx → în vecinătatea l a lui
0x astfel încât Ix∈∀ să avem: ( )( )( )( )
( )( )( )( )
.
,,,,
,
,,,,
zyDgfDyxDgfD
dxdz
zyDgfDxzDgfD
dxdy
==
Deci, problema din vecinătatea punctului M0 este reprezentată acum de
ecuaţiile explicite ( )( )
, .y y x
x Iz z x
⎧ =⎪ ∈⎨=⎪⎩

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
148
Astfel, porţiunea din C, din vecinătatea punctului M0 apare ca imaginea lui l prin aplicaţia ( )trr = în care ( ) ( ) ( )( ) Ittztyttr ∈= ,,, de aceea această porţiune este o curbă simplă şi regulată.
Mulţimea C care admite puncte regulate apare ca o reuniune de curbe simple
şi regulate, numindu-se curbă de ecuaţii carteziene implicite
Vectorul director al tangentei la curba ( )( )
, ,:
, ,
f x y z aC
g x y z b
⎧ =⎪⎨
=⎪⎩ într-un punct
regulat ( )0 0 0 0, ,M x y z C∈ este ( ) ( ) ( )kxdxdzjx
dxdyixr
rrrr000
' ++= şi presupunând că
( )( ) 0
,,
≠zyDgfD în 0,M ştiind că
( )( )( )( )
( )( )( )( )
, ,, ,
,, ,, ,
D f g D f gD z x D x ydy dzD f g D f gdx dxD y z D y z
= = avem:
( ) ( )( )
( )( )
( )( ) k
yxDgfDj
xzDgfDi
zyDgfDxrW MMM
rrrrr000 ,
,,,
,,
0' ++== λ
sau gradgxgradfW =r
în 0,M unde:
kzfj
yfi
xfgradf
rrr
∂∂
+∂∂
+∂∂
=
kzgj
ygi
xggradg
rrr
∂∂
+∂∂
+∂∂
=
şi

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
149
⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=
zg
yg
xg
zf
yf
xf
kji
W
rrr
r
Astfel ecuaţia tangentei în 0M este: ( ) gradgxgradfrrT λ=− 0: rr
sau
( )( )
( )( )
( )( )
000,,
,,
,,
:
M
o
M
o
M
o
yxDgfDzz
xzDgfDyy
zyDgfDxxT −
=−
=−
iar ecuaţia planului normal este ( ) [ ] 0:
00 =⋅−
MgradgxgradfrrN rr
sau
0:
000
000
000
=
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
−−−
MMM
MMM
zg
yg
xg
zf
yf
xf
zzyyxx
N
sau
( ) ( )( ) ( ) ( )
( ) ( ) ( )( ) 0
,,
,,
,,:
000
000 =−+−+−MMM yxD
gfDzzxzDgfDyy
zyDgfDxxN
Se va înţelege prin ( )( )
0,,
MzyDgfD valoarea determinantului ( )
( )zyDgfD
,, în punctul
0,M iar prin 0Mx
f∂∂ valoarea derivatei parţiale
xf∂∂ în punctul 0.M

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
150
19.3 Triedrul şi formulele lui Frenet
Voi face mai întâi câteva observaţii în ceea ce priveşte forma unei curbe în spaţiu în vecinătatea unui punct regulat al său.
Fie curba ( ) Ittrr ∈=Γ ,: rr . O aproximare a formei unei curbe din spaţiu se poate obţine utilizând trei derivate liniar independente.
De exemplu, presupunem că în punctul Γ∈P regulat, primele trei derivate ( ) ( ) ( )trtrtr '''''' ,, rrr alcătuiesc o bază a spaţiului tangent ( )3RTp .
Utilizând formula lui Taylor de ordinul trei:
( ) ( ) ( ) ( ) ( ) ( )[ ]htrhtrhtrhtrhtr εrrrrrr
++++=+ '''3
''2
'
!3!2!1
în care 0lim0
=→εr
h, rezultă că pentru h suficient de mic coordonatele vectorului
( ) ( )trhtrPO rr−+= în baza aleasă sunt date cu aproximaţie de către tripletul
.!3
,!2
,32
⎟⎟⎠
⎞⎜⎜⎝
⎛ hhh
Când h tinde la zero prima şi ultima coordonată îşi schimbă semnul, iar cea
din mijloc şi-l păstrează. Astfel, în vecinătatea lui P arcul se află în acelaşi semispaţiu faţă de planul ( ) ( )( )trtrP '''' ,, rr intersectează planul ( ) ( )( )trtrP ''' ,, rr şi dreapta ce trece prin P şi are
vector director ( )tr '''r . Planul determinat de ( ) ( )trtrP ''' ,, rr se numeşte plan osculator. În vecinătatea lui P, curba are o abatere de la tangentă (curbare) şi o abatere de
la planul osculator (torsionare).

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
151
Considerând o curbă parametrică dată prin ( )srrRJr rr=→ ,: 3 în care s este
un parametru natural, adică Jsdsrd
∈∀= ,1r
notăm ( ) drsds
τ =r
r versorul tangentei
în ( )srP = .
Derivând produsul scalar 1=⋅dsrd
dsrd rr
obţinem 02 2
2
=⋅dsrd
dsrd rr
. Cum 0≠dsrdr şi
02
2
≠ds
rd r, atunci 2
2
dsrd
dsd rr
=τ este ortogonal cu ( );sτ
r curba Γ se înconvoaie în
acelaşi sens cu 2
2
dsrd
dsd rr
=τ .
Înconvoierea lui Γ creşte odată cu creşterea lui 2
2
dsrd r
, de fapt 2
2
dsrd
dsd rr
=τ
estimează curbarea în vecinătatea lui P, iar lungimea lui dsdτr dă o măsură
numerică a acestei curbări.
Definiţia 19.16. i) Funcţia [ ) ( )dsdsKJK τr
=∞→ ,,0: se numeşte curbura lui
Γ în P, iar ( )1
K s se numeşte rază de curbură şi se notează ( ).R s
ii) Presupunând 0,K > versorul ( ) 1 dsK ds
τν =
rr se numeşte versorul normalei
principale la Γ în P; νr indică în fiecare punct sensul de curbare. Versorii ( ) ( )s şi sτ ν
rr determină planul osculator al curbei Γ în P.
Pentru determinarea abaterii curbei de la planul osculator în vecinătatea lui P se utilizează vectorul normal la acest plan.
Definiţia 19.17. Versorul ( ) ( ) ( )s s sβ = τ × ν
r rr normal la planul osculator la Γ în P se numeşte versor al binormalei la Γ în P.
Definiţia 19.18. Reperul ( ) ( ) ( )( ){ }sssP βντ
rrr ;;; ortonormat drept se numeşte reper Frenet ataşat punctului P de pe curba .Γ
Muchiile acestui triedru sunt: T - tangenta,
T
N
B
P
τr ν
r
βr

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
152
N - normala principală, B - binormala.
Planele de coordonate se numesc:
(P,T,N) plan osculator, (P,N,B) plan normal, (P,B,T) plan rectificant.
Utilizarea reperului lui Frenet constă în aceea că putem determina
, ,d d dds ds dsτ ν β
rrr în raport cu , , .τ ν β
rrr Astfel, ( ) ( ).d K s sdsτ= ⋅ ν
rr
Definiţia 19.19. Presupunând ( ) 0,K s > punctul C situat pe normala
principală N astfel ca ( ) ( ) ( ) ( ) ( )1PC s R s s sK s
= ρ = ν = νuuur r r r se numeşte centru de
curbură.
Să calculăm acum .ddsβr
Cum ( ), 1β β =r r
derivând obţinem 2 0,ddsβ
β =r
r adică
,ddsβ
β ⊥r
r dacă 0,d d deci
ds dsβ β≠
r r
e în planul osculator.
Deoarece 0,β ⋅ τ =r r prin derivare se obţine 0.d d
ds dsβ ττ +β =
r rrr Dar ,d Kdsτ= ⋅ ν
rr de
unde 0 0,d K dar dsβτ +β ν = βν =
rr rr rr deci 0,d
dsβτ =
rr de unde ,d
dsβ⊥ τ
rr adică d
dsβr
e
coliniar cu .νr
Definiţia 19.20. Funcţia reală :t J → R definită prin d tdsβ= − ν
rr se numeşte
torsiunea curbei.
Să exprimăm acum ddsνr
în raport cu , şi τ ν βrrr :
ββννννττνν rrrrr
rrr
rr
⎟⎠⎞
⎜⎝⎛ ⋅+⎟
⎠⎞
⎜⎝⎛ ⋅+⎟
⎠⎞
⎜⎝⎛ ⋅=
dsd
dsd
dsd
dsd
( ) ( ) ββνβνττντνν rr
rrrrr
rrrr
⎥⎦
⎤⎢⎣
⎡−⋅++⎥⎦
⎤⎢⎣⎡ −⋅=
dsd
dsd
dsd
dsd
dsd 0

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
153
( ) ( )βνντννββνττνν rrrrrrrr
rrr
rr
tKdsd
dsd
dsd
⋅+⋅−=−−=
deci .βτν rrr
tKdsd
+−=
Am demonstrat astfel următoarea teoremă: Teorema 19.2. Dacă 3: RJr → este o curbă de curbură K şi torsiune t,
atunci:
( ) ( ) ,d K s sdsτ= ν
rr
( ) ( ) ( ) ( )sstssKdsd βτν rrr
+−= ,
( ) ( ).sstdsd νβ rr
−=
Aceste relaţii se numesc formulele lui Frenet pentru o curbă parametrizată natural.
Lema 19.1. Dacă 3: RIr → defineşte o curbă regulată având ,dr vdt
=r
atunci:
( )
2 32
2 3
22 3 2 3
2
; ;
.
dr d r dv d rv Kvdt dt dt dt
d v dv dK v Kv Kv Ktvdt dt dt
= ⋅ τ = τ + ν =
⎛ ⎞ ⎡ ⎤= − τ + + ν + β⎜ ⎟ ⎢ ⎥⎣ ⎦⎝ ⎠
r rrr r
rrr
Demonstraţie.
.dr dr ds vdt ds dt
= ⋅ = τr r
r
Deoarece:
( ) ( )
( ) ( )
,
.
dr dr ds d v K s v sdt ds dt dsd d ds d v t s v sdt ds dt ds
τ= ⋅ = = ν
β β β= ⋅ = = − ν
r r rr
r r rr
Putem scrie că:

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
154
( )
( )
( )
( ) ( )
22
2
3 22 2
3 2
22 2
2
22 3
2
3 2
3 2
,d r d dv d dvv v Kvdt dt dt dt dtd r d dv d v dv dKv Kv Kvdt dt dt dt dt dt
d v dv d dKv Kv Kvdt dt dt dtd v dv dKv Kv Kv K tdt dt dtd r d v dv Kvdt dt dt
τ= τ = τ + = τ + ν
⎛ ⎞= τ + ν = τ + ν + ν =⎜ ⎟⎝ ⎠
ν= τ + ν + ν + =
= τ + ν + ν + − τ + β ⇒
⇒ = τ +
rrr r r
rr r rr r
rr rr
rr rr r
rrr ( )
( )
2 2 3 3
22 3 2 3
2 .
d Kv K v Kv tdt
d v dv dK v Kv Kv Kv tdt dt dt
ν + ν − τ + β =
⎛ ⎞ ⎡ ⎤= − τ + + ν + β⎜ ⎟ ⎢ ⎥⎣ ⎦⎝ ⎠
rr r
rrr
Teorema 19.3. Dacă 3: RIr → defineşte o curbă regulată, atunci
( )( ) '''
'''
'
'
,,rxrrxrx
trtr
rr
rrrrrrr
rr
=== βτβντ ,
3'
'''
r
rxrK r
rr
= ,
( ).2'''
''''''
rxr
rxrrt rr
rrr
=
Demonstraţie. Din ( )r t v′ = ⋅ τr r şi ( )v r t′= ⇒
r ( )( )
.'
'
trtrr r
rr=
Plecând de la 2 3 3 ,dvr r v Kv Kv Kvdt
⎛ ⎞′ ′′× = τ × τ + ν = τ× ν = β⎜ ⎟⎝ ⎠
rr rr r r r r obţinem:
3 .r rKv′ ′′×
β =r rr
Cum βr
e un versor, deci:
31 1r r r rKv r r′ ′′ ′ ′′× ×
β = ⇒ = ⇒ β −′′ ′′×
r r r rr rr r

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
155
şi deci 3 ,r r
Kv′ ′′×
=r r
dar ( ) 33 ,v r t′=r de unde 3 .
r rK
r
′ ′′×=
′
r r
r
Pentru determinarea torsiunii t considerăm produsul mixt ( ) ( ) ( ) 3 3 2 6 .r r r r r r r r r Ktv Kv K v t′ ′′ ′′′ ′′ ′′′ ′ ′′′ ′ ′′× = × = × = β ⋅ β =
r rr r r r r r r r r
De unde ( )2 6 ,
r r rt
K v′ ′′ ′′′×
=r r r
adică ( )2 .
r r rt
r r
′ ′′ ′′′×=
′ ′′×
r r r
r r
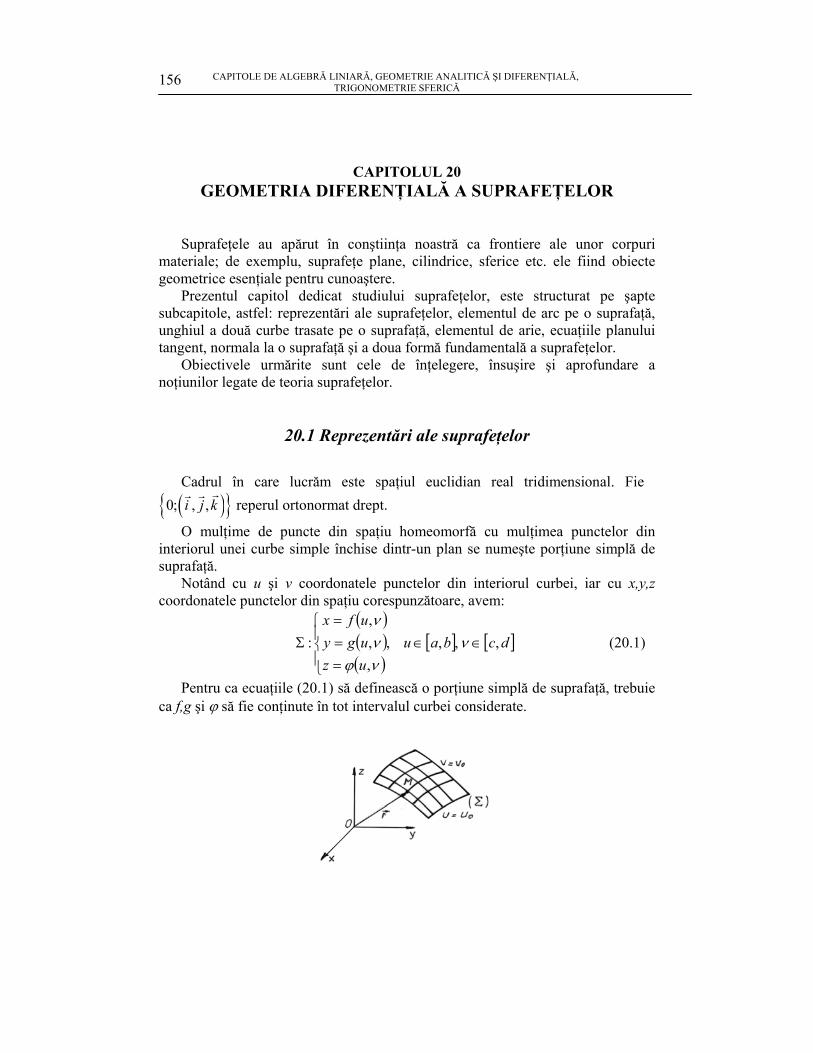
CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
156
CAPITOLUL 20 GEOMETRIA DIFERENŢIALĂ A SUPRAFEŢELOR
Suprafeţele au apărut în conştiinţa noastră ca frontiere ale unor corpuri materiale; de exemplu, suprafeţe plane, cilindrice, sferice etc. ele fiind obiecte geometrice esenţiale pentru cunoaştere.
Prezentul capitol dedicat studiului suprafeţelor, este structurat pe şapte subcapitole, astfel: reprezentări ale suprafeţelor, elementul de arc pe o suprafaţă, unghiul a două curbe trasate pe o suprafaţă, elementul de arie, ecuaţiile planului tangent, normala la o suprafaţă şi a doua formă fundamentală a suprafeţelor.
Obiectivele urmărite sunt cele de înţelegere, însuşire şi aprofundare a noţiunilor legate de teoria suprafeţelor.
20.1 Reprezentări ale suprafeţelor
Cadrul în care lucrăm este spaţiul euclidian real tridimensional. Fie
( ){ }0; , ,i j krr r
reperul ortonormat drept.
O mulţime de puncte din spaţiu homeomorfă cu mulţimea punctelor din interiorul unei curbe simple închise dintr-un plan se numeşte porţiune simplă de suprafaţă.
Notând cu u şi v coordonatele punctelor din interiorul curbei, iar cu x,y,z coordonatele punctelor din spaţiu corespunzătoare, avem:
( )( ) [ ] [ ]( )⎪
⎩
⎪⎨
⎧
=∈∈=
=Σ
νϕνν
ν
,,,,,,
,:
uzdcbauugy
ufx (20.1)
Pentru ca ecuaţiile (20.1) să definească o porţiune simplă de suprafaţă, trebuie ca f,g şi ϕ să fie conţinute în tot intervalul curbei considerate.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
157
Ecuaţiile (20.1) se numesc ecuaţiile parametrice ale suprafeţei Σ. Variabilele u şi v se numesc parametri sau coordonate curbilinii pe suprafaţă. Un punct de pe suprafaţă îl vom nota cu ( )0 0, .M u v Vom considera că funcţiile f, g şi ϕ sunt continue şi admit derivate parţiale
continue de cel puţin ordinul doi. Notând cu ,r xi yj zk= + +
rr rr vectorul de poziţie al unui punct curent de pe Σ atunci ( ) ( ) ( )kujugiufr
rrrr νϕνν ,,, ++= sau ( )ν,urr rr= , acestea numindu-se
ecuaţiile vectoriale ale suprafeţei Σ. O altă reprezentare pentru Σ este cea explicită: ( )yxzz ,= .
Într-adevăr, dacă luăm
( ),
x uy vz z u v
⎧ =⎪
=⎨⎪ =⎩
aceste ecuaţii sunt de fapt echivalente cu
primele. O altă formă a ecuaţiei unei suprafeţe este ecuaţia implicită: ( ), , 0.F x y z = Dacă eliminăm pe u şi v din primele ecuaţii, obţinem această ultimă ecuaţie.
Dacă presupunem de exemplu că 0,Fz
∂≠
∂ putem rezolva ecuaţia implicită şi
ajungem la o ecuaţie explicită ( )yxzz ,= . Punctele ( ),M u v de pe Σ pentru care ( ), 0F u v = reprezintă o curbă pe Σ.
Într-adevăr, dacă 0,Fv
∂≠
∂ putem rezolva ecuaţia ( ), 0F u v = în raport cu
( ),v v v u= şi obţinem:
( )( )( )( )( )( )⎪
⎩
⎪⎨
⎧
===
uuzuugyuufx
νϕνν
,,,
Aceste ecuaţii reprezintă pe x,y,z în funcţie de acelaşi parametru, deci reprezintă o curbă situată pe suprafaţă.
Curbele u = constant, respectiv v = constant de pe suprafaţă se numesc curbe coordonate.
Dacă ecuaţia implicită a suprafeţei e o ecuaţie algebrică de gradul n, suprafaţa se numeşte algebrică de gradul n. Suprafaţa care nu este algebrică se numeşte transcendentă.
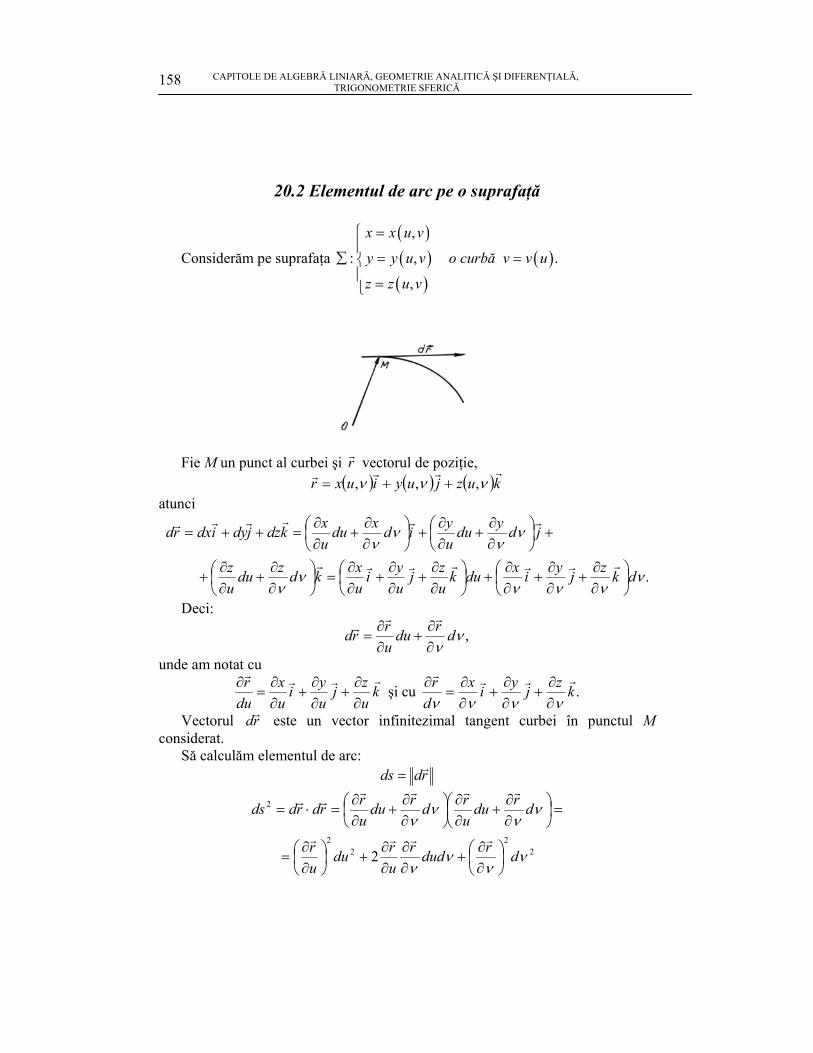
CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
158
20.2 Elementul de arc pe o suprafaţă
Considerăm pe suprafaţa ( )( )( )
( ),
: , .
,
x x u v
y y u v o curbă v v u
z z u v
⎧ =⎪
∑ = =⎨⎪ =⎩
Fie M un punct al curbei şi rr vectorul de poziţie,
( ) ( ) ( )kuzjuyiuxrrrrr ννν ,,, ++=
atunci
. νννν
νν
νν
νν
dkzjyixdukuzj
uyi
uxkdzdu
uz
jdyduuyidxdu
uxkdzjdyidxrd
⎟⎠⎞
⎜⎝⎛
∂∂
+∂∂
+∂∂
+⎟⎠⎞
⎜⎝⎛
∂∂
+∂∂
+∂∂
=⎟⎠⎞
⎜⎝⎛
∂∂
+∂∂
+
+⎟⎠⎞
⎜⎝⎛
∂∂
+∂∂
+⎟⎠⎞
⎜⎝⎛
∂∂
+∂∂
=++=
rrrrrrr
rrrrrr
Deci:
,νν
drduurrd
∂∂
+∂∂
=rr
r
unde am notat cu
kuzj
uyi
ux
dur rrrr
∂∂
+∂∂
+∂∂
=∂ şi cu .kzjyix
dr rrrr
νννν ∂∂
+∂∂
+∂∂
=∂
Vectorul drr este un vector infinitezimal tangent curbei în punctul M considerat.
Să calculăm elementul de arc: rdds r
=
22
22
2
2 νν
νν
νν
νν
drdudrurdu
ur
drduurdrdu
urrdrdds
⎟⎠⎞
⎜⎝⎛∂∂
+∂∂
∂∂
+⎟⎠⎞
⎜⎝⎛∂∂
=
=⎟⎠⎞
⎜⎝⎛
∂∂
+∂∂
⎟⎠⎞
⎜⎝⎛
∂∂
+∂∂
=⋅=
rrrr
rrrrrr

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
159
unde:
Edu
zdu
ydu
xdur
dur
dur
=⎟⎠⎞
⎜⎝⎛ ∂+⎟
⎠⎞
⎜⎝⎛ ∂+⎟
⎠⎞
⎜⎝⎛ ∂=
∂⋅
∂=⎟
⎠⎞
⎜⎝⎛ ∂
2222 rrr
Gd
zdvy
dx
dr
dr
dr
=⎟⎠⎞
⎜⎝⎛ ∂+⎟
⎠⎞
⎜⎝⎛ ∂+⎟
⎠⎞
⎜⎝⎛ ∂=
∂⋅
∂=⎟
⎠⎞
⎜⎝⎛ ∂
2222
ννννν
rrr
,Fd
zdu
zdvy
duy
dx
dux
dr
dur
=∂
⋅∂
+∂⋅
∂+
∂⋅
∂=
∂⋅
∂ννν
rr
de unde .2 222 νν GdFdudEduds ++= Membrul drept se numeşte prima formă diferenţială pătratică a lui Gauss sau
prima formă fundamentală în geometria diferenţială. O curbă u pe o suprafaţă e caracterizată prin 0,dv = iar o curbă v e
caracterizată prin 0.du = În acest caz, elementul de arc pe o curbă u respectiv v se scrie:
,ud s Edu= respectiv .vd s Gdv=
20.3 Unghiul a două curbe trasate pe o suprafaţă
Fie ( )( )( )
1
2
3
,
: ,
,
x f u v
y f u v
z f u v
⎧ =⎪
∑ =⎨⎪ =⎩
şi fie o curbă pe această suprafaţă dată prin ecuaţia
( ) ,v f u= atunci curba se mai poate scrie parametric:
( )( ) ( )( )( ) ( )( )( ) ( )⎪
⎩
⎪⎨
⎧
======
uFufufzuFufufy
uFufufx
33
22
11
,,,
O altă curbă pe Σ poate fi dată prin ( )v g u= care se mai poate reprezenta prin:
( )( ) ( )( )( ) ( )( )( ) ( )⎪
⎩
⎪⎨
⎧
======
uGugufzuGugufy
uGugufx
33
22
11
,,,
Pentru prima curbă ,fdv duu∂
=∂
iar pentru a doua uugv δ⋅∂∂
=δ .

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
160
Vectorul tangent într-un punct M la prima curbă este ,r rdr du dvu v∂ ∂
= +∂ ∂
r rr iar
pentru a doua curbă este r rr u vu v∂ ∂
δ = δ + δ∂ ∂
r rr .
Notând cu θ unghiul dintre cei doi vectori tangenţi care este tocmai unghiul
celor două curbe pe Σ, se obţine
rrdrrdrrdrrd rr
rrrrrr
δδθθδδ⋅
=⇒⋅= coscos
dar:
( ) νδννδδνδ
νδνν
νδν
δνν
δδ
GdudduFuEdu
dd
ruddur
drdu
dr
durudu
durrrd
+++=
=⎟⎠⎞
⎜⎝⎛ ∂+
∂∂+
∂∂+⎟
⎠⎞
⎜⎝⎛ ∂=
22 rrrrrrrr
2222 22 δνδνδδννδδ GuFuEGdFdudEdusdsrrd ++⋅++==⋅rr
( )2222 22
cosδνδνδδνν
νδννδδνδθGuFuEGdFdudEdu
GdudduFuEdu++⋅++
+++=
În cazul curbelor parametrice: pentru curba parametrică u obţinem 0,dv = iar o curbă parametrică v este caracterizată prin 0.uδ =
Notând acum cu ϕ unghiul curbelor parametrice, obţinem:
.cosEGF
GEduFdu
=⋅
=δν
δνθ
Dacă 0,F = curbele sunt ortogonale. În cazul reprezentării carteziene ( )νν ,,, uzzyux === ,
puz
uy
ux
=∂∂
=∂∂
=∂∂ ;0;1

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
161
qzyx=
∂∂
=∂∂
=∂∂
ννν;1;0
22222
1 puz
uy
ux
urE +=⎟
⎠⎞
⎜⎝⎛∂∂
+⎟⎠⎞
⎜⎝⎛∂∂
+⎟⎠⎞
⎜⎝⎛∂∂
=⎟⎠⎞
⎜⎝⎛∂∂
=r
pqzuzy
uyx
uxr
urF =
∂∂
⋅∂∂
+∂∂
⋅∂∂
+∂∂
⋅∂∂
=∂∂
⋅∂∂
=νννν
rr
22222
1 qzyxrG +=⎟⎠⎞
⎜⎝⎛∂∂
+⎟⎠⎞
⎜⎝⎛∂∂
+⎟⎠⎞
⎜⎝⎛∂∂
=⎟⎠⎞
⎜⎝⎛∂∂
=νννν
r
şi ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( )( ).
1111
12112111cos
222222
22222222
22
qppq
qduppqdu
qupqupdqpqduddupdquddupqudup
++=
+⋅+=
=++++⋅++++
+++++=
δν
δνδνδνδδνν
νδννδδνδθ
20.4 Elementul de arie pe o suprafaţă definită prin ecuaţiile ei parametrice
Vom lua ca element de arie, aria paralelogramului construit cu ajutorul
vectorilor infinitezimali tangenţi în M curbelor parametrice care trec prin M.
Pe curba u, ,urdr du r duu∂ ′= =∂
rr r iar pe curba v, .v
rdr dv r dvv∂ ′= =∂
rr r

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
162
Notând cu dσ elementul de arie, atunci ϕσ ν sinssddd u=
Dar νν dGsdduEsdu == , , deci νϕσ dudEGd sin= ; cum:
EGF
=ϕcos , deci EG
FEG 2
sin −=ϕ , de unde νσ dudFEGd 2−= .
În cazul reprezentării parametrice, dxdyqpd 221 ++=σ unde ν== yux ,
şi ( )ν,uzz = .
20.5 Ecuaţiile planului tangent la o suprafaţă definită prin ecuaţiile parametrice
În relaţia ,r rdr du dv dr
u v∂ ∂
= +∂ ∂
r rr r este un vector tangent la o curbă trasată pe
suprafaţa considerată într-un punct pe ea, iar r duu∂∂
r şi r dv
v∂∂
r sunt vectori
infinitezimali tangenţi în M la curbele parametrice care trec prin M. Relaţia scrisă mai sus ne spune că oricare ar fi curba trasată pe suprafaţă, ce
trece prin M, tangenta la ea în M e în acelaşi plan cu tangentele la curbele parametrice care trec prin M.
Presupunând că 0,r ru v∂ ∂
× ≠∂ ∂
r r adică M e punct ordinar al suprafeţei (altfel ar fi
fost singular), atunci putem spune că locul geometric al tangentelor la toate curbele trasate pe o suprafaţă ce trece prin M este planul tangent la suprafaţă în punctul M.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
163
Fie ( ), ,P X Y Z situat în planul tangent în ( ), ,M x y z la suprafaţă. Ecuaţia planului tangent este:
( ) 0: =⎟⎠⎞
⎜⎝⎛
∂∂
∂∂
−ν
π rxurrRt
rrrr
- ecuaţia vectorială
sau trecând la coordonate carteziene
: 0t
X x Y y Z zx y zu u ux y zv v v
− − −∂ ∂ ∂
π =∂ ∂ ∂∂ ∂ ∂∂ ∂ ∂
- ecuaţie carteziană
Când suprafaţa e reprezentată prin ecuaţia carteziană explicită , ,x u y v= = ( ), ,z x y= ecuaţia planului tangent este:
01001: =
−−−
qp
zZyYxX
tπ
sau ( ) ( )yYqxXpzZ −+−=− . Să considerăm acum suprafaţa reprezentată printr-o ecuaţie implicită ( ) 0,,: =Σ zyxF şi un punct ( )0000 ,, zyxM situat pe Σ, adică ( ) 0,, 0000 =zyxF .
O dreaptă care intersectează suprafaţa în două puncte confundate se numeşte tangentă la suprafaţă. Dacă intersectăm suprafaţa dată cu o dreaptă dată prin ecuaţiile parametrice:
⎪⎩
⎪⎨
⎧
+=+=+=
nzzmyylxx
dλλλ
0
0
0
,: vom obţine
( ) 0,, 000 =+++ nzmylxF λλλ (20.2) Dacă dezvoltăm (20.2) în serie Taylor în jurul punctului 0M şi ţinem seama
de relaţiile anterioare, ordonând după ,λ vom obţine: ( ) (
) 02ln22 2''''''
''2''2''2'''
000000
'0
'0
'0000
=++++
++++++
Kλ
λ
zyxxyx
zyxzyx
mnFFlmF
FnFmFlnFmFlF
unde prin K,,,, ''''''00000 yxxyx FFFF am notat
K,,,,0000
2
2
2
MMMM yxF
zF
yF
xF
∂∂∂
∂∂
∂∂
∂∂

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
164
Termenii nescrişi în dezvoltare conţin pe λ, la cel puţin puterea a 3-a. Pentru ca dreapta să intersecteze suprafaţa în două puncte confundate
reprezentate de 0,M trebuie ca ecuaţia să aibă o rădăcină dublă 0,λ = adică .0'''
000=++ xxx nFmFlF
Pe de altă parte 0 0 0, ,x x y y z zl m n− − −= = =
λ λ λ de unde
( ) ( ) ( ) 0'0
'0
'0 000
=−+−+− xxx FzzFyyFxx Această ultimă ecuaţie este ecuaţia planului tangent la suprafaţă în punctul
0.M Dacă cel puţin una din derivatele parţiale ale funcţiei ( ), ,F x y z calculate în
0M este nenulă, atunci planul tangent e bine determinat şi 0M se numeşte punct ordinar al suprafeţei. Tangentele într-un punct ordinar la o suprafaţă formează planul tangent la suprafaţă în punctul considerat.
Dacă în 0M avem ( ) 0,, 000'''000
==== zyxFFFF zyx punctul 0M se numeşte punct singular al suprafeţei.
Dacă toate derivatele parţiale până la ordinul p se anulează în 0,M iar cea de ordinul p nu se anulează, atunci 0M este un punct singular de ordin p.
Deci, orice dreaptă ce trece printr-un punct singular de ordinul p al unei suprafeţe o întâlneşte în p puncte confundate.
Dacă o suprafaţă e intersectată în ( )1p + puncte confundate de o dreaptă, într-un punct singular de ordin p, dreapta se numeşte tangentă la suprafaţă.
Într-un punct singular de ordinul 2, pentru ca dreapta dată să fie tangentă la suprafaţă, trebuie ca 0λ = să fie rădăcină triplă, deci revenind la dezvoltarea în seria Taylor obţinem:
02ln22 ''''''''2''2''0000002
020
20
=+++++ zyxxyxxyxmnFFlmFFnFmlF
şi înlocuind pe l, m, n obţinem: ( ) ( ) ( ) ( )( )
( )( ) ( )( ) 022
2''
00''
00
''00
''20
''20
''20
0000
0020
20
20
=−−+−−+
+−−+−+−+−
zyzx
yxzyx
FzzyyFzzxx
FyyxxFzzFyyFxx
Deci, tangentele la suprafaţă într-un punct singular de ordinul doi sunt situate pe un con, numit conul tangentelor în punctul respectiv.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
165
20.6 Normala la suprafaţă. Contactul dintre o curbă şi o suprafaţă
Definiţia 20.1. Fie ecuaţia carteziană a unei suprafeţe ( ) ( ) 0,,: =Σ zyxF .
Dreapta perpendiculară pe planul tangent la o suprafaţă în punctul ordinar 0M se numeşte normala la suprafaţă în acel punct.
Parametrii directori ai normalei la suprafaţă sunt coeficienţii planului tangent şi atunci ecuaţia normalei este:
.'0
'0
'0
000 zyx Fzz
Fyy
Fxx −
=−
=−
Considerăm o curbă Γ dată prin ecuaţiile parametrice: ( ) ( ) ( ).,, tzztyytxx ===
Curba Γ şi suprafaţa Σ au în punctul ( )0 0M t un contact de ordinul n dacă au
în ( )0, 1M n + puncte confundate. Intersectând curba şi suprafaţa vom obţine:
( ) ( ) ( )[ ] 0,, =tztytxF sau 0=φ . Pentru ca ecuaţia să aibă rădăcina 0t cu ordin de multiplicitate 1n + trebuie ca
( ) ( ) ( ) 000'
0 ==== ttt nφφφ K , iar ( ) ( ) 001 ≠+ tnφ .
20.7 A doua formă fundamentală a suprafeţei
Să determinăm unghiul θ format de normala la suprafaţă într-un punct ordinar M şi normala principală la o curbă trasată pe suprafaţă şi care trece prin M.
Fie nr versorul normalei la Σ în M şi νr versorul normalei principale, iar θ unghiul dintre cei doi versori.

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
166
Putem scrie că θθνν coscos =⋅⋅=⋅rrrr nn .
Din prima formulă a lui Frenet:
2
211ds
rdKds
dK
Kdsd rr
rrr
⋅=⋅=⇒⋅=τνντ
.cos,1cos 2
2
2
2
dsrdnK
dsrd
Kn
rr
rr
=⋅⋅= θθ
Versorul nr este perpendicular pe planul tangent, deci este perpendicular şi pe
,r r şi pe u v∂ ∂∂ ∂
r r deci:
ν
ν
∂∂
∂∂
∂∂
∂∂
=rx
ur
rxur
n rr
rr
r
⇒
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=∂∂
∂∂
ννν
νzyxuz
uy
ux
kjirx
ur
rrr
rr
222
⎟⎠⎞
⎜⎝⎛
∂∂
∂∂
−∂∂
∂∂
+⎟⎠⎞
⎜⎝⎛
∂∂
∂∂
−∂∂
∂∂
+⎟⎠⎞
⎜⎝⎛
∂∂
∂∂
−∂∂
∂∂
=∂∂
∂∂
uxzx
uz
uzyz
uy
uyxy
uxrx
ur
ννννννν
rr.
Ţinând seama de identitatea lui Lagrange: ( )2222 ννν
rrrrrr⋅−⋅= uuxu
obţinem:
=∂∂
∂∂
νrx
ur rr
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎠⎞
⎜⎝⎛
∂∂
∂∂
+∂∂
∂∂
+∂∂
∂∂
−⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎠⎞
⎜⎝⎛∂∂
+⎟⎠⎞
⎜⎝⎛∂∂
+⎟⎠⎞
⎜⎝⎛∂∂
⋅⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎠⎞
⎜⎝⎛∂∂
+⎟⎠⎞
⎜⎝⎛∂∂
+⎟⎠⎞
⎜⎝⎛∂∂ 2222222
ννννννz
uzy
uyx
uxzyx
uz
uy
ux
2FEG −= deci,
2FEG
rxur
n−∂∂
∂∂
= ν
rr
r
Să determinăm şi 2
2 .d rds
r

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
167
Pentru aceasta ,r rdr du dvu v∂ ∂
= +∂ ∂
r rr atunci:
22
222
2
22 2 ν
νν
νdrdud
udrdu
urrd
∂∂
+∂∂
+∂∂
=rrr
r
2
22
2
222
2
2
2
2
2
2
νν
νν
νν
GdFdudEdu
drdudud
rduur
dsrd
++∂∂
+∂∂
+∂∂
=
rrrr
înlocuind în
( )222
22
222
2
2
22
22
2
22
2
22
2
F-EG
2
Edu
2
coscos
νν
ννν
νννν
νν
νν
νν
ννθθ
GdFdudEdu
drxurrdudrx
ur
udrdurx
ur
ur
GdFdud
drdudu
rduur
FEGd
rxur
dsrd
FEGd
rxur
dsrdn
RK
++
⎟⎠⎞
⎜⎝⎛
∂∂
∂∂
∂∂
+⎟⎠⎞
⎜⎝⎛
∂∂
∂∂
∂∂
+⎟⎠⎞
⎜⎝⎛
∂∂
∂∂
∂∂
=
=++
∂∂
+∂∂
∂+
∂∂
⋅
⋅−
∂∂∂
=⋅−
∂∂∂
===⋅
rrrrrrrrr
rrr
rrr
rrr
r
Notăm
Lrxur
ur
FEG=⎟
⎠⎞
⎜⎝⎛
∂∂
∂∂
∂∂
− ν
rrr
2
2
2
1
Mrxur
udr
FEG=⎟
⎠⎞
⎜⎝⎛
∂∂
∂∂
∂∂
− νν
rrr2
2
1
Nrxurr
FEG=⎟
⎠⎞
⎜⎝⎛
∂∂
∂∂
∂∂
− νν
rrr
2
2
2
1
atunci
22
22
22cos
ννννθ
GdFdudEduNdMdudLdu
R ++++
= .
Trinomul 22 2 νν NdMdudLdu ++ se numeşte a doua formă fundamentală în teoria suprafeţelor.
CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
168
CAPITOLUL 21 TEOREMA LUI MEUSNIER ŞI LINIILE DE
CURBURĂ PE O SUPRAFAŢĂ
Studiul celei de a doua forme fundamentale a unei suprafeţe, ne conduce către determinarea principalelor tipuri de linii şi de curburi ale unei suprafeţe. Prin urmare, acest capitol, prin cele patru subcapitole ale sale, abordează liniile asimptotice, teorema lui Meusnier, curbura curbelor şi liniile de curbură pe o suprafaţă.
Prezentul capitol a urmărit ca obiective determinarea şi recunoaşterea elementelor caracteristice ale suprafeţelor.
21.1 Linii asimptotice
Dacă în formula 2 2
2 2cos 2
2Ldu Mdudv Ndv
R Edu Fdudv gdvθ + +=
+ + facem cos 0,
Rθ= obţinem
02 22 =++ νν NdMdudLdu (21.1) În acest caz normala la suprafaţă este perpendiculară pe normala principală,
adică versorii n şi νrr sunt perpendiculari. Normala principală şi versorul ei νr sunt conţinuţi în planul tangent la
suprafaţă. În planul tangent la suprafaţă mai este situat şi versorul tangent .τr Ori
vectorii şi ν τr r sunt situaţi în planul osculator. Deci pentru
2π
θ = planul osculator
devine plan tangent la suprafaţă. Definiţia 21.1. Curbele de pe suprafaţă, pentru care planul osculator este
tangent la suprafaţă, se numesc linii asimptotice ale suprafeţei. Rezultă că ecuaţia diferenţială a liniilor asimptotice ale unei suprafeţe este
ecuaţia 21.1. Împărţind ecuaţia 21.1 cu 2,dv obţinem:
022
=+⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛ N
dduM
dduL
νν (21.2)
de unde:
LLNMM
ddu −±−
=2
ν
sau

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
169
2
2
M M LNdu dvL
M M LNdu dvL
⎧ − + −=⎪⎪
⎨− − −⎪ =⎪⎩
două ecuaţii diferenţiale, cu soluţiile de forma: ( )( )⎩
⎨⎧
==
22
11
,,
CufCuf
νν
(C1, C2 = constante)
Deci, pe o suprafaţă sunt, în general, două familii de linii asimptotice. Punând condiţia ca liniile asimptotice să treacă prin punctul ( )000 , yxM ,
obţinem: ( )( )⎩
⎨⎧
==
0022
0011
,,νν
ufCufC
(C1, C2 = constante)
Rezultă că printr-un punct situat pe o suprafaţă trec, în general, două linii asimptotice.
După natura rădăcinilor ecuaţiei (21.2) distingem: a) Dacă 02 >− LNM în punctul 0,M cele două linii asimptotice care trec
prin 0M sunt reale şi diferite şi punctul 0M se numeşte hiperbolic. b) Dacă 02 =− LNM în punctul 0,M cele două linii asimptotice care trec
prin 0M sunt confundate şi punctul 0M se numeşte parabolic. c) Dacă 02 <− LNM în punctul 0,M cele două linii asimptotice care trec
prin 0M sunt imaginare şi punctul 0M se numeşte eliptic. ....................................................................................................
21.2 Teorema lui Meusnier
Centrul de curbură într-un punct M al unei curbe (C) trasate pe o suprafaţă este proiecţia ortogonală a centrului de curbură a secţiunii normale tangente în M la curbă pe planul osculator al curbei (C).
Am văzut că avem:
22
22
22cos
νννν
ρθ
GdFdudEduNdMdudLdu
++++
=
Împărţind membrul doi al relaţiei (21.1) cu 2dv la numărător şi numitor, obţinem:

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
170
GdduF
dduE
NdduM
dduL
+⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛
+⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛
=
νν
ννρθ
2
2cos
2
2
(21.3)
şi dacă notăm ,dudv
= λ , relaţia (21.3) devine
GFENML
++++
=λλλλ
ρθ
22cos
2
2
(21.4)
Membrul doi din (21.4) depinde de punctul ( ),M u v de pe suprafaţă şi de
raportul ,dudv
= λ adică de tangenta la curba (C) în acest punct.
Să considerăm o altă curbă ( )1C tangentă la ( )C în punctul ( ), .M u v Dacă notăm cu 1θ unghiul format de normala principală la curba 1,C şi normala la suprafaţă în M şi cu 1ρ raza de curbură a curbei în acest punct, avem:
GFENML
++++
=λλλλ
ρθ
22cos
2
2
1
rezultă că
1
coscosρθ
ρθ= (21.5)
Să presupunem că în punctul ( ),M u v curbele ( )C şi ( )1C au acelaşi plan osculator, care diferă de planul tangent la suprafaţă, deoarece dacă ar coincide,
1 ,2π
θ = θ = iar 1cos cos cos 02π
θ = θ = = şi ambii membri ai relaţiei (21.5) ar fi
nuli. În cazul acesta 1θ = θ şi din (21.5) rezultă că 1.ρ = ρ Acest lucru se întâmplă dacă luăm curba ( )1C rezultată din secţiunea plană a
suprafeţei cu planul osculator la curba (C) în punctul ( ), .M u v Deci studiul curburii curbelor trasate pe o suprafaţă se reduce la studiul
curburii curbelor plane ale suprafeţei. Să considerăm o curbă ( )C trasată pe o suprafaţă şi fie ( ),M u v un punct
situat pe ea (fig.1).

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
171
Numim secţiune normală tangentă în M la curbă, curba plană ( ) ,nC care se obţine prin secţionarea suprafeţei cu planul determinat de normala la suprafaţă în M şi tangenta la curba ( )C în acest punct.
Figura 1 Figura 2
Dacă notăm cu nρ raza de curbură a secţiunii normale ( )nC şi mai
presupunem că sensul pozitiv al normalei la suprafaţă în M este acelaşi cu sensul pozitiv al normalei la secţiunea normală ( ) ,nC avem 1 0θ = şi relaţia (21.5) devine:
θρρ cosn= (21.6)
Dacă notăm cu 1C centrul de curbură al curbei ( )C (fig. 2) în punctul
( ),M u v şi cu 2C centrul de curbură al secţiunii normale ( )nC în acelaşi punct, avem:
1
2n
MCMC
ρ =⎧⎨ρ =⎩
Înlocuind în (21.6) avem: 1 2 cosMC MC= θ
de unde rezultă că triunghiul 1 2MC C este dreptunghic în 1C deci 2 1C C este perpendiculară pe 1,MC adică pe normala principală la curba ( ).C
Dreapta 2 1C C este situată în planul normal la curba ( ) ,C deci este perpendiculară şi pe tangenta la curba C în M. Atunci dreapta 2 1C C este perpendiculară şi pe planul determinat de normala principală şi tangenta în M la curbă, adică pe planul osculator.
Putem spune că 1C este proiecţia punctului 2C pe planul osculator la curba
( )C în punctul M şi teorema lui Meusnier este demonstrată. ...................................................................................................................

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
172
21.3 Curbura curbelor pe o suprafaţă
Pentru 0,θ = formula (21.1), devine:
R=GFENML
++++
=λλλλ
ρ 221
2
2
(21.7)
Numim cantitatea 1ρ
curbura normală a curbei ( )C în punctul M. Fiind dat
un punct M pe o suprafaţă, prin el trec o infinitate de curbe trasate pe suprafaţă. Fiecărei curbe i se ataşează câte o curbură normală. Prin urmare, unui punct
situat pe o suprafaţă i se ataşează o infinitate de curburi normale. Să arătăm că mulţimea acestor numere este mărginită inferior şi superior. Ordonând ecuaţia (21.7) după puterile lui λ, găsim discriminantul ei:
21 1 1F M E L G Nρ ρ ρ
⎛ ⎞ ⎛ ⎞⎛ ⎞− − − − = Δ⎜ ⎟ ⎜ ⎟⎜ ⎟
⎝ ⎠ ⎝ ⎠⎝ ⎠ (21.8)
Făcând calculele în (21.8) şi ordonând după puterile lui 1 ,ρ
obţinem ecuaţia
atasata:
( ) ( ) 0121 22
2 =−+−+−− MLNFMGLENFEGρρ
(21.9)
Ţinând seama că 02 >− FEG , inegalitatea 0Δ ≥ este satisfăcută pentru:
21
111ρρρ
≤≤
unde 1
1ρ
şi 2
1ρ
sunt rădăcinile ecuaţiei (21.9).
Valorile 1
1ρ
şi 2
1ρ
sunt, respectiv, valoarea minimă şi maximă a curburii
normale. Aceste curburi se numesc curburile principale în punctul M de pe suprafaţă. Expresia
21
1ρρ
=K
se numeşte curbura totală a suprafeţei într-un punct M situat pe suprafaţă. Ţinând seama de ecuaţia (21.9), avem:
2
2
21
11FEGMLN
acK
−−
==⋅=ρρ
Expresia

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
173
21
11ρρ
+=H
se numeşte curba medie a suprafeţei într-un punct M al ei. Ţinând seama de ecuaţia (21.9), avem:
221
211FEG
FMGLENabH
−−+
=−=+=ρρ
Suprafeţele care au curbura totală constantă se numesc suprafeţe minimale.
21.4 Linii de curbură pe o suprafaţă
Curbele de pe o suprafaţă care trec printr-un punct M al suprafeţei ale căror curburi normale în punctul M sunt curburile principale în acest punct se numesc liniile de curbură ale suprafeţei.
Considerăm relaţia (21.7)
GFENML
++++
=λλλλ
ρ 221
2
2
1ρ
este considerată ca funcţie de λ, putem găsi extremele ei anulând derivata de
ordinul I. Avem:
( )( ) ( )( )( )22
22
222221
GFENMLFEGFEML
++
+++−+++=
λλ
λλλλλλρ
(21.10)
curburile principale ale suprafeţei în M se obţin anulând derivata (21.10): ( )( ) ( )( ) oNMLFEGFEML =+++−+++ λλλλλλ 22 22
sau scrisă sub forma unei proporţii:
FEML
GFENML
++
=++++
λλ
λλλλ
22
2
2
(21.11)
Înmulţim partea a doua a relaţiei (21.11) cu ( )−λ şi facem suma numărătorilor pe suma numitorilor, avem:
FEML
GFNM
FEML
GFENML
++
=++
=−−−−
=++++
λλ
λλ
λλλλ
λλλλ
22
2
22 (21.12)
Făcând produsul mezilor egal cu produsul extremilor în ultimile rapoarte din (21.12), obţinem:
( ) ( ) ( ) 02 =−+−+− GMFNGLENFLEM λλ (21.13)

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
174
Înlocuind pe ,dudv
λ = obţinem ecuaţia diferenţială care ne dă liniile de curbură
ale suprafeţei: ( ) ( ) ( ) 022 =−+⋅−+− νν dGMFNdduGLENduFLEM (21.14)
În general, ecuaţia (21.14) are două rădăcini în .du dv sau dv du
Natura rădăcinilor ecuaţiei (21.14) depinde de semnul realizantului: ( ) ( )( )
( ) ( )( ) 042
4
2
22
2
≥−−
+⎥⎦⎤
⎢⎣⎡ −−−=
=−−−−=Δ
EFLEMFEGFLEM
EFGLEN
GMFNFLEMGLEN
care este întotdeauna pozitiv sau nul. Deci ecuaţia (21.14) are întotdeauna rădăcini reale. Rezolvând ecuaţia (21.14), obţinem ecuaţiile diferenţiale:
( ) ( )νν
νν
,;, 21 ufdduuf
ddu
==
unde 1 2,f f depind de E, F, G, L, M, N. Prin integrare găsim curbele
( ) ( ) 2211 ,,, CuFCuF == νν Deci pe o suprafaţă există două familii de linii de curbură 1 2.C şi C Liniile de curbură care trec prin punctul ( )0 0 0,M u v sunt:
( ) ( )( ) ( )⎩
⎨⎧
==
0022
0011
,,,,νννν
uFuFuFuF
Am înlocuit pe ( )0011 ,νuFC = şi ( )0022 ,νuFC = . Deci, printr-un punct de pe suprafaţă trec două linii de curbură. Să determinăm unghiul θ format de două linii de curbură care trec prin acelaşi
punct ( )ν,uM . Ştim că:
( )2222 22
cosδνδνδδνν
νδννδδνδθGuFuEGdFdudEdu
GdduduFuEdu++⋅++
++++=
Împărţind numărătorul şi numitorul părţii din dreapta a relaţiei de mai sus cu dv vδ obţinem:
GuFuEGdduF
dduE
Gdudd
duFd
udduE
++⎟⎠⎞
⎜⎝⎛⋅++⎟
⎠⎞
⎜⎝⎛
+⎟⎠⎞
⎜⎝⎛ ++⋅+⋅
=
δνδ
δνδ
νν
νδνδν
ννδ
νθ22
2
cos (21.15)

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
175
ori du u şi dv v
δδ
sunt rădăcinile ecuaţiei (21.13) şi avem:
FLEMENGL
abu
ddu
−−
=−=+δνδ
ν
şi
FLEMGMFN
acu
ddu
−−
==⋅δνδ
ν
calculând numărătorul din relaţia (21.15), obţinem:
0=−
−++−=+
−−
+−−
FLEMFGLEGMFGLEGMG
FLEMEFNFGL
FLEMEGMEFN
deci
2,0cos πθθ ==
Rezultă că liniile de curbură de pe o suprafaţă constituie un sistem ortogonal de curbe ale suprafeţei.
Să facem o schimbare de parametru pe suprafaţă astfel încât liniile de curbură să fie curbele coordonate.
În acest caz liniile de curbură fiind ortogonale avem condiţia: 0F =
şi ecuaţia (21.14) devine: ( ) 022 =−−+ νν GMddudGLENEMdu (21.16)
Ecuaţia (21.16) trebuie să fie verificată de .constu = şi .const=ν
Adică trebuie să avem: 0=EM şi 0=GM
de unde 0=M
Deci, sistemul de coordonate ortogonale pe suprafaţă pentru care avem 0,M = este format din liniile de curbură şi reciproc.
Punctul de pe suprafaţă în care liniile de curbură sunt nedeterminate se numeşte punct ombilical al suprafeţei.
Pentru ca un punct al unei suprafeţe să fie ombilical din ecuaţia (21.14) trebuie să avem:
0,0,0 =−=−=− GMFNGLENFLEM (21.17) sau
GN
FM
GN
EL
FM
EL
=== ,,
sau

CAPITOLE DE ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI DIFERENŢIALĂ, TRIGONOMETRIE SFERICĂ
176
GN
FM
EL
==
Într-un punct ombilical avem:
En
11=
ρ
Deci curburile normale într-un punct ombilical al curbelor de pe suprafaţă care trec prin acest punct sunt egale.
Dacă realizantul Δ este nul şi ţinem seama de (21.17) rezultă că dacă într-un punct al suprafeţei liniile de curbură sunt confundate, punctul respectiv este ombilical.


















