ECHIPAMENTELE ELECTRICE UTILIZATE IN ACTIONAREA UTILAJULUI INDUSTRIAL.doc

of 14
Upload
ciurila-cristianCategory
view
228download
07/30/2019 actionarea motorului de curent continu
1/14
Analele Universit ii Constantin Brncui din Trgu Jiu, Seria Inginerie, Nr. 1/2011
Annals of the Constantin Brncui University of Trgu Jiu, Engineering Series, Issue 1/2011
150
SISTEM DE ACIONARE CU
MOTOR DE CURENTCONTINUU COMANDAT CU
CALCULATORUL
ILIE BORCOI1, OVIDIU
LAURENIU TULPAN2,
CLAUDIA TULPAN3
1Constantin Brncui University,2,3 Siemens VDO Automotive,
Timisoara, Continental CorporationCompany, Romania
REZUMAT: Pentru reglarea turaieimotorului de curent continuu, am realizat un sistembazat pe un calculator, pe care ruleaz un programn timp real. n aceast lucrare noi prezentm
schema bloc a sistemului de reglare a turatieiprecum si detalii despre elementele componente alesistemului: modulul de comunicaie i interfaLPT,traductoarele de curenti turaie,dispozitivulde sincronizare cu fazele sistemului de alimentare ielementul de execuie.
CUVINTE CHEIE: motor de curent continuu,calculator, senzor infrarou, dispozitiv de
sincronizare.
1. INTRODUCERELa multe procese actuale supuse
automatizrii, structura convenional dereglare (cu legi PI) nu permite obinereaunor performane dorite. De aceea, alegereastructurii sistemelor de reglare se faceinnd cont de complexitatea procesului, de
gradul de cunoatere al acestuia, precum ide performanele impuse. Pentru comandamotorului de curent continuu, fcnd ocomparaie ntre un sistem de reglare curegulatoare PI i un sistem cu regulatorFuzzy, un rspuns mult mai bun(suprareglaj i timpi de stabilizare mici) lao intrare treapt este obinut prin folosirearegulatorului Fuzzy [1]. Reglareasistemelor cu Fuzzy presupune existenaunor structuri de calcul rapide i
performante.
DRIVER SYSTEM WITH DC
MOTOR COMMANDEDWITH THE COMPUTER
ILIE BORCOI1, OVIDIU
LAURENIU TULPAN2,
CLAUDIA TULPAN3
1Constantin Brncui University,2,3 Siemens VDO Automotive,
Timisoara, Continental CorporationCompany, Romania
ABSTRACT: For rotation speed control ofthe direct current motor, we made a system basedon a computer that running a program in real time.
In this paper we present the block diagram of speedcontrol system and details of system components:communication module and interface LPT, currentand rotation speed transducers, device
synchronization with phase of the supply system andexecution element.
KEYWORDS: DC Motor, personal computer(PC), infrared sensor, synchronization device.
1. INTRODUCTIONAt many actual processes that are
automated, the conventional structure ofcontrol (with PI regulators) doesnt affordto obtain the wished performances. That is
why choosing the structure of the controlsystem is made in the accord with theprocess complexity, its knowledge degree,as well as the imposed performances. Forthe command of the direct current motor,making a compare between the controlsystem with the PI regulators and a Fuzzyregulating system, a much better response(small overrides and stabilization times) ata step input is obtained by using the Fuzzyregulator [1]. Regulating with the fuzzy
system assumes the existence of a calculusstructure fast and performs.
7/30/2019 actionarea motorului de curent continu
2/14
Analele Universit ii Constantin Brncui din Trgu Jiu, Seria Inginerie, Nr. 1/2011
Annals of the Constantin Brncui University of Trgu Jiu, Engineering Series, Issue 1/2011
151
Structurile hardware organizate njurul microprocesoarelor de 8 bii, 16 bii i32 bii au deschis noi direcii pentrurealizarea unor structuri moderne desisteme de conducere [2] [5]. Astfel, s-au
impus structurile de conducere distribuitinclusiv achiziiei distribuit a datelor deproces, precum i structurile ierarhizate deconducere, n cadrul crora fiecruiechipament i revin sarcini n concordancu poziia ocupat n ierarhie. Asemeneaarhitecturi de sistem distribuite iierarhizate sunt caracterizate printro naltflexibilitate i fiabilitate, prin performanesuperioare, determinate de puterea decalcul, viteza de prelucrare i de clasele de
algoritmi evoluai ce pot fi implementai, ncomparaie cu structurile de conducerecentralizat cu calculator de proces.
Obiectivul acestei lucrri esteprezentarea unui sistem de comand cucalculator pentru controlul vitezei de rotaiea unui motor de curent continuu.
2. DESCRIEREA SISTEMULUI
2.1. Structura sistemului de comand
Schema bloc a sistemului dereglarea vitezei de rotaie a unui motor de curentcontinuu este prezentat n figura 1.
2.2. Modulul de interfa LPTInterfaa cu portul LPT al
calculatorului (numit i modul decomunicaie n figura 1, pentru c ajut lacomunicaia ntre PC i celelalte module)conine dou buffere tip 74HCT573
selectabile pe rnd prin semnalul trimis pepinul 1 al portului LPT (fig. 2). Acestsemnal este aplicat direct pe pinul Output-
Enable al unuia dintre buffere (pinul 1 alintegratului) i negat prin poarta U3A ctre
pinul Output-Enable al celuilalt. Unuldintre buffere este folosit pentru ieiri ctreelementul de execuie (puntea de for), iarcellalt pentru intrri dinspre dispozitivulde sincronizare cu fazele.
Cele dou buffere au, n afar deintrarea Output-Enable, pentru selecia
The hardware structures organizedaround the microprocessor of 8 bits, 16 bitsand 32 bits have opened new directions formaking modern structures of controlsystem [2] [5]. In this way, they stented
the structures of the distributed control thatincluding the distributed acquisition of dataprocess as well as the hierarchical controlstructures, where every equipment hastasks in concordance with the hierarchical
position. These architectures of distributedand hierarchical system have a highflexibility and liability, with higher
performances determent by the calculationspower, working speed, and the performedalgorithms class that can be implemented,
in compare with the centralized controlstructures with the process computer.
The objective of the paper is topresent a system that uses a computer forcontrol of the direct current motors (DCMotors) rotation speed.
2. THE SYSTEM DESCRIPTION
2.1. The structure of the commandsystem
The block diagram for regulatingsystem of the direct current motors rotationspeed with computer is presented in figure1.
2.2. The interface module LPT
The communication module (fig.1)from the process computer to the elements
block diagram is realized with help parallelport (LPT). The circuit of the LPT interface
is presented in the figure 2. The interfacewith the LPT port of the computer contains2 buffers of type 74HCT573 selectable onturn by the signal send by the first pin ofthe LPT port. This signal is applied directlyon the Output-Enable pin of one of the
buffers (first pin of the integrate circuit)and denied through the gate U3A towardsthe Output-Enable pin of the other one.One of the buffers is used for to sendcommand outputs signals to the executionelement (the power rectifier) and the other
7/30/2019 actionarea motorului de curent continu
3/14
Analele Universit ii Constantin Brncui din Trgu Jiu, Seria Inginerie, Nr. 1/2011
Annals of the Constantin Brncui University of Trgu Jiu, Engineering Series, Issue 1/2011
152
modului de lucru, nc o intrare LachEnable, care se aplic la pinul 11.
is used for to send the signals from thesynchronization device with the phases tocomputer.
Fig. 1. Schema bloc a sistemului Fig.1. The block diagram of the system
Atunci cnd la pinul 1 al portului LPTavem 0 logic, ieirile bufferului U1 sunt nstarea nalt impedan, iar bufferul U2 estetransparent (informaia de la intrare estetransmis la ieire). Cnd la pinul 1 al
portului LPT avem 1 logic, atunci bufferulU2 va avea ieirile n starea de naltimpedan, iar bufferul U1 va transmiteinformaia de la intrrile sale la ieiri, adicinformaia de la modulul de sincronizare.
Bufferul U1 va avea o singur intrare activla un moment de timp dat. Dac ntre timpintrarea activ comut n 0, bufferul U1 i
pstreaz valorile anterioare ale ieirilor,fiindc intrarea de selecieLach Enable arevaloarea 0. Acest lucru permiteidentificarea exact a impulsurilor desincronizare, deoarece ele sunt active uninterval de timp mic.
Acelai modul servete i ca interfactre traductorul de vitezi sens. Pentru c
i acesta genereaz impulsuri, s-a doritapelarea ntreruperii i pentru acestea (totdin motive de sincronizare n timp real).Aceste impulsuri sunt nsumate n poartaU5A. Ieirea din aceast poart estensumat la rndul ei, cu ieirea porii U4C,
pentru a genera aceeai ntrerupere, ntructportul paralel nu dispune dect de o singurntrerupere extern.
The 2 buffers have, beside theOutput-Enable input, for the selection ofthe work mode, another Latch Enable inputwhich is applied at the 11 pin. Then whento the 1 pin of the LPT port is 0, theoutputs of the U1 buffers are in highimpedance, but the U2 buffer is transparent(the input information is delivered to theoutput). When to the 1 pin of the LPT portwe have 1, then the U2 buffer will have the
outputs in high impedance, but the U1buffer will deliver the information from theinputs (the information from thesynchronized module) to the outputs. TheU1 buffer will have only one active input atany moment of time. If in the time theactive input commutes in 0, the outputs U1
buffer will keep the values 0, because theselection input Latch Enable is 0. Thisthing allows the exact identification of thesynchronized impulses, because they are
active a small time interval.The same module serves as aninterface for the speed transducer. Becausethis also generates impulses, it was wantedto call the interruption and for theseimpulses (also for the synchronized in realtime). These impulses are introduced in theOR gate U5A. The output from this gate issummed with the output of the U4C gate,to generate the same interruption, becausethe parallel port has only one external
interruption.
7/30/2019 actionarea motorului de curent continu
4/14
Analele Universit ii Constantin Brncui din Trgu Jiu, Seria Inginerie, Nr. 1/2011
Annals of the Constantin Brncui University of Trgu Jiu, Engineering Series, Issue 1/2011
153
Fig. 2. Schema electronic a interfeeiLPT.
Pentru a detecta soft de la care dintremodule a sosit semnalul de ntrerupere,rezultatul porii SAU U4C a fost introdus
prin bufferul U1 ctre pinul 8 al portuluiparalel. Astfel, dac bitul respectiv arevaloarea 1 n momentul activriintreruperii, softul va detecta c estentrerupere de la modulul de sincronizare,i nu de la modulul de turaie i sens.Probabilitatea ca ntreruperea s fie activatn acelai timp de modulul de sincronizarei de traductorul de vitez este mic.Totui, dac se ntmpl acest lucru, seapeleaz i se testeaz intrrile
corespunztoare i se detecteaz sursantreruperii.
Tot modulul de comunicaie facelegtura ntre portul LPT i pinii decomunicaie ai circuitului MAX111 folositla traductorul de curent.
2.3. Modulul msur curent i protecieRealizeaz msurarea curentului pe
cele trei faze de alimentare ale redresorului,protecia la nefuncionarea unui element
semiconductor de putere (lips pulsuri)precum si protecia la depirea valorii de
Fig.2. The interface module LPT
To detect soft which the moduleshas generated the interruption signal, thegate result OR U4C has been introduced
through the U1 buffer by the 8 pin of theparallel port. In this way, if the bit has thevalue 1 in the activation interruptionmoment, the soft will detect that it isinterrupted from the synchronizing mod,and not the speed module. The probabilitythat the interruption is activated at the sametime by the synchronized module and thespeed module is small. Still, if that happenswe call and test the input and detect theinterruption source.
Also, the interface module makesthe connection between the LPT port andthe communication pins of the MAX111circuit, used at the current conversion.
2.3. The current measurement module
Making the measurement current bythe 3 phases of alimentation of the rectifier,the protection at the not working a power
semiconductor element (the absence of thepulses for the load) as well as the
7/30/2019 actionarea motorului de curent continu
5/14
Analele Universit ii Constantin Brncui din Trgu Jiu, Seria Inginerie, Nr. 1/2011
Annals of the Constantin Brncui University of Trgu Jiu, Engineering Series, Issue 1/2011
154
suprasarcina a curentului. Modulul esteidentic cu dispozitivul de protecie ce faceobiectul unei cereri de brevet de invenie[6].
Am folosit ca traductor de curent
transformatorul de curent de tip ASM10. nprimarul transformatorului am bobinat maimulte spire pentru a mri sensibilitatea,astfel nct, la o valoare a curentului prin
primar de 0,3A, legnd n secundar osarcin de 50, se obine o tensiune cuamplitudinea de 40 mV. Se folosesc doutrnsformatoare de curent pentru msurareacurentului primelor dou faze, iar pentrucea dea treia faz se reface curentul prinnsumarea primelor dou faze. Deoarece
acest traductor furnizeaz o tensiuneanalogic la ieirea sa, proporional cuvaloarea curentului motorului, va finecesar utilizarea unui convertor A/D
pentru a obine valoarea numeric a acestuisemnal, utilizabil n sistemul numeric.
Semnalul obinut la ieireasumatorului inversor se aplicconvertorului analog numeric de curentastfel nct la 1.8In din curentul primar, sexiste o tensiune de 0.8V, aceasta urmnds fie convertit analog numeric. nacest scop, am ales C.I. MAX111.
MAX111 este un CAN cu tehnicde auto-calibrare inclus, cu o rezoluie de
pn la 14bii + bit de semn la un timp deconversie de 200ms. Dar printre modurilesale de lucru, este i acela n care poateconverti n 6ms la o rezoluie de 12bii, darcu o eroare maxim de 10%.
2.4. Traductorul de turaie
Pentru obinerea informaiei deturaie se folosete un traductor formatdintr-un disc, montat pe axul motorului,disc pe care este dispus un orificiu Or [2].Acest orificiu permite trecerea fluxuluiluminos, de la un emitor spre unreceptor montai fa n fa pe un suport.Acetia sunt dispui astfel nct orificiul Ors treac prin dreptul fiecrui grupemitor receptor. Traductorul are ncomponen trei senzori, adic trei grupuri
emitor receptor.
protection at the over excess the value ofthe current overload. The module is similarwith the protection device that makes theobject of a demand of patent for invention[6].
We used as a current transducer thecurrent transformer type ASM10. In theprimary transformer we reeled more spiresto increase the sensibility so that at a valueof the current through the primary of 0.3 A,tying in the secondary a load of 50 , weget an amplitude tension of 40 mV. We usetwo current transformers to measure thecurrent of the first two phases, and for the 3
phase we redo the current by summing thefirst two phases. Then the current signals of
three phases are rectified with precisionrectifiers and summing. Because thistransducer gives an analogical voltage athis output, proportional with the value ofthe motor current, we need to use an A/Dconverter (MAX 111) to obtain thenumerical value of this signal, usable innumeric systems.
MAX 111 is a converter with theauto calibration technique included, with aresolution until 14 bits + bit of sign at aconversion time of 200 ms. But betweenthe work ways, is the one in which we canconvert in 6 ms at a resolution of 12 bits,
but a maximum error of 10 %.
2.4. The rotation speed transducer
For obtaining the rotation speedinformation we use a transducer formedwith a disk, fixed on the motors ax, disk onwhich we have the 2 orifice (incremental
transducer) [8]. This orifice allows the lightflux to pass, from the emitter to therecipient fixed face to face on a scale.These are put in an order so that the orificeto pass through each emitter-receiver. Thetranslator has in his formed with 3 sensors,3 groups emitter receiver. We use thistype transducer because the interruptioninput is activated rarely (it has threeimpulses/rotation).
When the impulse appears from the
central sensor, we calculate the speed of
7/30/2019 actionarea motorului de curent continu
6/14
Analele Universit ii Constantin Brncui din Trgu Jiu, Seria Inginerie, Nr. 1/2011
Annals of the Constantin Brncui University of Trgu Jiu, Engineering Series, Issue 1/2011
155
Atunci cnd apare impulsul de lasenzorul central, se calculeaz turaia cuformula vrot=(f/T)*60, exprimat nrot/min, unde T este valoarea unui contorce se incrementeaz cu frecvena f (intern
calculatorului). n acelai timp, citindordinea activrii senzorilor laterali, sestabilete sensul de rotaie cu ajutorulcalculatorului.
2.5. Elementul de execuie
Un rol important n cadrulsistemelor de reglare a turaiei motoarelorde curent continuu este reprezentat dealegerea elementului de execuie compusdin puntea redresoare i dispozitivul decomand
pe gril
. Am ales un redresor
trifazat n punte datorit avantajelor sale:- ncarc n mod simetric fazele
reelei de alimentare (deci avem un consumechilibrat pe fiecare faz);
- nivelul ondulaiilor tensiunii deieire este mai redus fa de situaiamonofazic, prin urmare i circuitele defiltrare sunt mai simple;
- factorul de utilizare altransformatorului de reea este mbuntit.
Pentru realizarea practic a punii sefolosesc triace (BT138) pentru c acesteapermit lucrul n patru cadrane, obinndu-seo comand optimal cu pierderi de energieminime [9]. Schema electronic a punii detriace este cea din figura 3.
Se observ c n locul folosiriischemei clasice de comand a triacelor cutransformatoare de impulsuri (care sunt maivoluminoase i introduc i un mic defazajntre impulsurile din primari secundar) s-
a ales varianta folosirii unor optotriace.Elementul electro-luminiscent al acestoraeste alimentat direct din bufferul TTLdedicat, din modulul de comunicaie. Sereduce astfel schema de comand foartemult (lipsesc sursele de alimentare,amplificatoarele de impulsuri, etc.).Polarizarea optotriacului se face n acelaimod cu triacul pe care l comand,tensiunea de comand pentru acesta dinurm, obinndu-se din cderea de tensiune
pe rezistenele dintre gril i anodul 2.
rotation with the formula: vrot=(f/T)*60,where T is the value of a counterr whichincrements with the f frequency (thecomputer internal frequency). At the sametime, reading the order of the side sensors
activity, we establish the rotation sensewith the help of the computer.
2.5. The execution elementAn important role in the control
system of the rotation speed motor of directcurrent is choosing the execution elementcompose from a three-phase rectifiercommanded and the command device onthe gate. We choose a three-phased rectifierin bridge because of its advantages:
- loading in symmetrical mode theelectric power supply network (so we havea balanced consumption on each phase),
- the ripple level output tension issmaller in comparing with the monophasedrectifier, and so the filtration circuits aresimpler,
- the used factor of the transformernetwork is improved.
For the practical making of therectifier we use triacs (BT 138) becausethese allow work in four quadrants,obtaining an optimal command with aminimum energy loss [9]. The electronicdiagram of the rectifier in bridge is
presented in figure 3.We can see that in stead of using
the classic command diagram of bi-directional triode thyristors with theimpulse transformers (which are bigger andhave a small phase difference between the
primary and the secondary) we chooseusing the photo-bi-directional triodethyristors. The electro-lightning of theseones is charged directly from the TTL
buffer from the communication module.The command diagram is reduce verymuch (no power supply, impulse amplifier,and so). The photo-bi-directional triodethyristors polarization is made in the samemode as the bi-directional triode thyristorscommanded, the command voltage for
these one, is obtained from the falling ofthe voltage on the resistors between the
7/30/2019 actionarea motorului de curent continu
7/14
Analele Universit ii Constantin Brncui din Trgu Jiu, Seria Inginerie, Nr. 1/2011
Annals of the Constantin Brncui University of Trgu Jiu, Engineering Series, Issue 1/2011
156
Optotriacele folosite (MOC 3062) suntprevzute cu circuit de detecie de trecereprin zero iar, deschiderea optotriacelor iimplicit a triacelor comandate, are locimediat dup ce tensiunea ajunge la valori
corespunztoare.
gate and the second anode (main terminaltwo). The photo-bi-directional triodethyristors used (MOC 3062) have adetection circuit of passing through zero,the opening of the photo-bi-directional
triode thyristors and the commanded bi-directional triode thyristors, takes placeimmediately after the voltage gets tooptimum value.
Fig.3. Puntea de triace
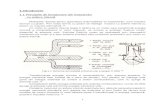
2.6. Dispozitivul de sincronizare cu fazele
Pentru comanda redresoruluitrifazat n punte, este necesar cunoaterea
punctului de intersecie a tensiunii fazelor,punct de la care se msoar unghiul decomand la care se d comanda deaprindere a triacelor. Pentru a cunoatemomentul de timp cnd se egaleaz doucte dou tensiunile corespunztoaresistemului trifazat, am proiectatdispozitivul de sincronizare din figura 4[10].
Ieirile optocuploarelor CNY-17din schem comut ntre 1 i 0 logic
Fig.3. The bi-directional triode
2.6. The synchronizing device with the
phases
For the command rectifier three-phase in bridge, is necessary knowing theintersection point of the phase voltage,
point on which we can measure thecommand angle, , on that we give thelight command bi-directional triodethyristors. For knowing the time momentwhen they become equal two and twovoltage for the three-phase system, werealized the synchronized device from the
figure 4 [10].The photocoupler CNY-17 outputs,
7/30/2019 actionarea motorului de curent continu
8/14
Analele Universit ii Constantin Brncui din Trgu Jiu, Seria Inginerie, Nr. 1/2011
Annals of the Constantin Brncui University of Trgu Jiu, Engineering Series, Issue 1/2011
157
dup cum alternanele ce alimenteazemitoarele acestora sunt pozitive saunegative. Limitarea curentului prin LED-urile optocuploarelor se face cu ajutorulrezistenelor montate n anodul acestora.
Pentru a le proteja de tensiunile inversemari la care nu rezist, n catod au fostnseriate diode ce au tensiunea inversadmisibil mai mare dect tensiunea dintrefaze.
Impulsurile la ieirea dispozitivuluisunt scurte (au durat mic) i iau natere
prin utilizarea porilor inversoare TriggerSchmidt i a filtrelor trece sus. Estenecesar s existe n sistem doar impulsuriscurte pe 1 logic, pentru c acestea sunt
nsumate cu pori SAU n modulul decomunicaie, spre a forma sursa dentreruperi a portului paralel.
from the diagram, switch from 1 to 0 andfrom 0 to 1 logic in such a way like thealternances that supply the emitter are
positive and negative. The current limitingthrough the led of the photocoupler is made
with the help on the resistors fixed on thethere anode. For protecting the largeinverse voltage, in the anode we inserteddiodes which have the reverse voltageadmissible bigger then the voltage betweenthe phases.
The impulses from the outputs ofthe device are shorter (have a smaller time)and them obtaining by using the reversegate Trigger Schmidt and of the high-passfilters. It is necessary that there is in the
system just short impulses on the 1 logicbecause these are summed with help ORgates in the communication module, toform the interrupt source of the parallel
port.
Fig.4.Dispozitivul de sincronizare cufazele
n figura 5 se observ evoluia ntimp a fazelor i impulsurile generate deacest modul la intersecia dintre faze.
Fig.4. The synchronizing device with thephases
In the figure 5 we can see in timethe evolution in time of the phases and theimpulses generated by synchronizingdevice at the intersection of the phases.
7/30/2019 actionarea motorului de curent continu
9/14
Analele Universit ii Constantin Brncui din Trgu Jiu, Seria Inginerie, Nr. 1/2011
Annals of the Constantin Brncui University of Trgu Jiu, Engineering Series, Issue 1/2011
158
Fig.5. Evoluia n timp a tensiunilor fazelori impulsurilor generate de dispozitivul de
sincronizare cu fazele
2.7. Logica software de comanda
Pentru a genera impulsuri pentrutriace, defazate fa de momentul desincronizare, cu un interval de timpcorespunztor unghiului de comand, se
folosete urmtorul algoritm software:- La apariia unei ntreruperi LPT,
se verific dac aceasta a avut loc din cauzaunui impuls de sincronizare sau a unuiimpuls al traductorului de turaie.
- Se verific de la care dintreperechile de faze a fost transmis impulsul.
- Se iniializeaz contorulcorespunztor impulsului recepionat cuvaloarea calculat de sistemul de reglareimplementat cu legi PI sau Fuzzy.
- La fiecare ntrerupere internTIMER se decrementeaz toate contoarelede sincronizare (iniializate la pasulanterior).
- Cnd unul din contoare ajunge la0, se trimite impulsul de aprindere ctrecele dou triace corespunztoare, caretrebuie s fie n conducie.
Softul pentru sistemul de reglareeste realizat pentru un calculator cu
arhitectur Intel x86. Pentru a puteacalculata turaia motorului i pentru a
Fig.5. The phases voltage and outputimpulses of synchronizing device.
2.7. The software logic of command
To generate impulses for the bi-directional triode thyristors, phased incomparison with the synchronizedmoments, with a time interval in according
to the command angle, , we use thefollowing software implemented incomputer:
- at the appearance of the LPTinterruption , we check if that took place
because of a synchronized impulse or aimpulse of the rotation speed transducer;
- we check from that the phases pairthe signal is send;
- we initialize the contour inaccording with the received impulse and
with the calculated value of the controlsystem implemented with the PI or Fuzzylaw;
- at every internal interruptionTIMER we decrement all synchronizedcontours (initialized before this step);
- when one among the contours getat 0, we send a command impulse on to thetwo bi-directional triode thyristors, whichneed to be in conduction.
The soft for the control system is
made for a computer with the Intel x86architecture. If we need to calculate the
7/30/2019 actionarea motorului de curent continu
10/14
Analele Universit ii Constantin Brncui din Trgu Jiu, Seria Inginerie, Nr. 1/2011
Annals of the Constantin Brncui University of Trgu Jiu, Engineering Series, Issue 1/2011
159
atepta unghiul de comand ncepnd cumomentul de sincronizare respectiv, avemnevoie de un timer de nalt rezoluie. ncalculator, responsabil de timer estecircuitul 8253 Timer Programabil (PIT -
Programmable Interval Timer), care are 3canale, fiecare revenindu-i o sarcindiferit. Dintre aceste canale, ne este utilnumai canalul 0. Fiecare canal dispune decte un contor descresctor. PIT-ul dispunede un oscilator pilotat cu quartz a cruifrecven este de 1193181 Hz (1234DDhexazecimal). Fiecare contordecrementeaz la fiecare impuls de tact.Ultima numrare, menionat mai jos, serefer la momentul n care contorul ajunge
la 0. ncrcarea contoarelor cu 0 are acelaiefect cu al ncrcrii lor cu 10000h i estecea mai mare perioad posibil(aproximativ 18,2 Hz).
Pentru a lucra cu contorulcanalului 0 folosim portul 40h (pentru ascrie i citi contorul) i portul 43h (pentru ascrie cuvntul de control al PIT-ului).Dintre cele 6 moduri n care funcioneazPIT-ul (modul 0 ntreruperi la ultimanumrare, modul 1 o singur numrare,modul 2 divizor de frecven, modul 3 generator de semnal dreptunghiular, modul4 impuls generat software, modul 5 impuls generat hardware), vom folosimodul 2.
Avnd n vedere faptul cntreruperea TIMER se apeleaz de 54000
pe secund, n 20ms (o perioad complet)sunt 1080 de decrementri, ceea cefurnizeaz o rezoluie de 3 puncte pentru
un grad de comand. Deoarece, conformsubcapitolului IV.6 unghiul maxim decomand este 160o , rezult c valoareamaxim a contorului de ateptare pentrufiecare impuls este 480.
Am stabilit ca rutina de tratare atimer-ului s fie apelat de 54000 de ori pesecund, considernd aceast frecvensuficient de mare pentru rezoluia decomand a elementului de execuie isuficient de mic pentru a permite rularea
rutinei de tratare a ntreruperii n timp real,fr ntrzieri i fr a bloca calculatorul. n
motor rotation speed and to wait thecommand angle beginning with thesynchronized time, we need a timer of highresolution. In the computer, responsible ofthe timer is the 8253 circuit
Programmable Timer ( PIT- ProgrammableInterval Timer) which has 3 channels, eachchannel has a different task. Between allthe channels we use only the 0 channel.Every channel has a discounting counter.PIT has a piloted oscillator with quartzwith a frequency of 1193181 Hz(1234ddh). Every counter counts down atevery tact impulse. The last countingmentioned in continued, refers to themoment when the counter gets to 0.
Loading the counters with 0 have the sameeffect of loading them with 10000h and isthe biggest possible period (approximately18.2 Hz). In order to work with the counterof the channel 0 we use the 40h port (towrite and read the counter) and the port 43h (to write the control word of the PIT).Among the 6 modes that work PIT (the 0mode interrupt at the last count, 1 mode only one count, 2 mode frequencydivisor, 3 mode - right angle signalgenerator, 4 mode - the software generatedimpulse, 5 mode the hardware generatedimpulse), we will use the 2 mode.
Considering the fact that theTIMER interruption is called 5400 for asecond, in 20 ms (on a complete period)there are 1080 decrements, which lead to aresolution of 3 points for a command grad.Because the maximum command angle is160 degrees, it result that the maximum
value of the waiting counter for eachimpulse are 480. We established that theTIMER treatment routine can be called54000 per second, considering that thisfrequency is big enough for the commandresolution of the execution element andsmall enough to allow the runninginterruption routine in real time, without
being late or blocking the computer. The fcalculation frequency of the motor rotationspeed (the increment of the contour -T
value- for measuring the rotation speed)has the value f=54000 Hz, but the speed of
7/30/2019 actionarea motorului de curent continu
11/14
Analele Universit ii Constantin Brncui din Trgu Jiu, Seria Inginerie, Nr. 1/2011
Annals of the Constantin Brncui University of Trgu Jiu, Engineering Series, Issue 1/2011
160
aceast situaie, frecvena f de calcul aturaiei motorului (de incrementare acontorului alocat calulrii turaiei) arevaloarea f=54000Hz, iar viteza de rotaie seva calcula cu formula: vrot=(54000/T)*60.
3. CONCLUZIIn acionrile electrice motorul de
c.c prezint avantajele:-caracteristicile lui sunt pozitive
pentru cupluri mari de pornire, necesareatunci cnd motorul este folosit latraciune;
-domeniul de variaie al vitezei estesuficient de larg;
-circuitele de comand sunt mai
ieftine i mai simple.Ca dezavantaje enumerm:-necesit o surs special de curent
continuu;-la aceeai putere motoarele de c.c.
sunt mai mari dect cele de c.a.;-necesit msuri speciale de pornire(la puteri mari)n cadrul sistemelor de acionare
electric cu motoare de curent continuu,pentru alimentarea motorului cu puteri mai
mari de 2-3 kW, este bine s se foloseascredresoare polifazate, numrul optim defaze fiind 3, n ceea ce privete factorul deutilizare al transformatorului redresorului.Factorul de utilizare al unui transformatoreste definit ca raportul dintre puterea utiltransmis sarcinii i puterea aparent anfurrii. Este de dorit ca factorul deutilizare al transformatorului s fie ct maimare, pentru c, n acest caz, gabaritul icostul transformatorului sunt mici la o
putere util cerut.n scopul reglrii turaiei unui
motor de curent continuu, se pot utiliza attlegi de reglare convenionale (de exempluPI) ct i legi de reglare moderne, cum suntlegile create dup logic Fuzzy. Mai mult,acestea pot fi combinate n cadrul aceleiaischeme (regulator de turaie cu Fuzzzy,regulator de curent PI). Din analiza
performanelor celor dou regulatoare,
rezult un avantaj considerabil n cazulfolosirii Fuzzy, observndu-se uor
rotation will be calculated using theformula: vrot=(54000/T)*60.
3. CONCLUSIONSIn the drive system the using of theDC Motor has advantages like:
-his characteristics are positive forbig starting torque, necessary when themotor is used at traction;
-the variation speed domain issufficiently large;
-the command circuits are simpleand cheaper.
As disadvantages it has:
-it needs a special source ofcontinuum current;-at the same power the DC Motors
are bigger then one AC Motor;-it needs special starting
measurement (at big powers).The drive systems with motors of
direct current for the alimentation of themotors with big power 2-3 kW, is good thatwe use poly-phased rectifiers with theoptimum phase number 3, in relation to the
using factor of the redresser transformer.The using factor of the transformer is therapport between the actual power of theload and the apparent power of the coil. Is
preferred that the using factor of thetransformer to be bigger, because in thesecase the size and cost are smaller at anactual power asked.
To control the speed of a DC motormay be used conventional laws (e.g. PI) ormodern control laws, as are the laws
created by fuzzy logic. Furthermore, theycan be combined within the same scheme(with Fuzzy speed regulator and currentregulator PI). Analyzing the performanceof the responses two control structuresshows a significant advantage when usingFuzzy, we have observing slight reductionof the override and insertion process
period.Fuzzy regulatory systems require
the existence of fast and efficient computersystem. Given these considerations, for
7/30/2019 actionarea motorului de curent continu
12/14
Analele Universit ii Constantin Brncui din Trgu Jiu, Seria Inginerie, Nr. 1/2011
Annals of the Constantin Brncui University of Trgu Jiu, Engineering Series, Issue 1/2011
161
diminuarea suprareglajului i a durateiregimului tranzitoriu.
Sistemele de reglare Fuzzy impunexistena unui sistem de calcul rapid ieficient. Avnd n vedere aceste
considerente, pentru controlul vitezei derotaie a motorului de curent continuu, ne-am propus si implementat un sistem bazat
pe un computer care execut un program ntimp real. Pe langa calculator, sistemulinclude: o interfa i modul decomunicare, traductor de curent, traductorde rotaie, dispozitiv de sincronizare cufazele i elementul de execuie. Trebuiereinut c toate componentele au o structurcare difer mai mult sau mai puin de cele
convenionale (recunoscute).Astfel:- modulul de interfa creeaz o
legtur bidirecional pentru informaii ntimp real (utiliznd procedura dentrerupere) ntre calculator i altecomponente ale sistemului;
- traductorul de curent, detaliat n[6], este folosit ca un dispozitiv de
protecie la supracurent i puls lips;- traductorul turaie funcioneaz
foarte bine cu o structur de calcul deperformant (ca i n acest caz, uncalculator);
- dispozitivul de sincronizare cufazele ofer informaii despre momentelede timp n care tensiunile sunt egale pedou din cele trei faze, ajut la calculareaunghiului de comand, pentru comanda
bi-directional a triacelor. Are ncomponen: optocuploare pentru izolare
galvanic (nlocuiesc transformatoarele),porti NU Trigger Schmidt pentru obinereade impulsuri dreptunghiulare i circuite dederivare pentru reducerea durateiimpulsurilor (sa nu se suprapun cusemnalele de la intrarea de ntrerupere);
-elementul de execuie compus dinpuntea redresoare i dispozitivul decomand pe grila. Pentru realizarearedresoarelor am folosit triace, deoarece ele
permit s lucreze n patru cadrane,
rezultnd un control optim cu pierderiminime de energie. n locul comenzii
control the DC Motors rotation speed, weproposed and implemented a system basedon a computer running a program in realtime. Besides the computer, the systemincludes: a module interface and
communication, transducer current,rotation speed transducer, devicesynchronization with the phases andexecution element. Note that allcomponents have a structure that differsmore or less than the conventional(recognized).
Thus:- the interface module creates a
bidirectional link for information in real
time (using interruption input) betweencomputer and other components of thesystem;
- current transducer, detailed in [6]is used as a protection device at overcurrentand pulse missing;
- rotation speed transducer worksvery well with performance structurecomputing (as in this case a computer);
- device synchronization withphases gives information about themoments of time when voltages are equalson two of three phases, helping to controlthe angle calculation , for bi-directionaltriode thyristor command. It made of theelements: photocouplers for galvanicisolation (replacing transformers), TriggerSchmidt NOT gates for obtainingrectangular pulses and derivation circuitsfor decreasing pulse duration (do notoverlap with signals to interrupt input);
-the execution element composed ofbridge rectifiers and command device ofgate. For realization of the rectifiers I used
bi-directional triode thyristors because theyallow the work in four quadrants, resultingan optimal control with minimal energyloss. In place of bi-directional triodethyristors classical command diagram with
pulse transformers (which are bulky andintroduce disturbances) have chosen theuse of photo-bi-directional triode thyristors.
Their electro-luminescent element is feddirectly from TTL buffer dedicated
7/30/2019 actionarea motorului de curent continu
13/14
Analele Universit ii Constantin Brncui din Trgu Jiu, Seria Inginerie, Nr. 1/2011
Annals of the Constantin Brncui University of Trgu Jiu, Engineering Series, Issue 1/2011
162
clasice a triacelor cu transsformatoare deimpulsuri (care sunt voluminoase iintroduc perturbatii) s-a ales utilizarea defototiristoare. Elementul lor electro-luminiscent este alimentat direct de la
buferul modulului de comunicatiereducandu-se foarte mult schema decomand (sursele de alimentare lipsesc,amplificatoarele de impuls, i aa maideparte).
BIBLIOGRAFIE
[1] I. Borcosi, A. Runceanu, C.Vilan,Fuzzy System For The AdjustmentOf The Continuos Current Motors
Revolution,, Sesiunea de comunicritiinifice a Universitii dinPetrosani Universitaria ROPET2004 ,15-16 octombrie 2004, ISBN973-8260-69-8, pag. 151-156.
[2]A. Mihilescu, I. Borcoi, C. Vilan, Theuse of the PIC16F84 microcontrollerin some devices for rubber industry,The 5th International CarphatianControl Conference ICCC 2004,Zakopane Poland, May, 25-28, 2004.
[3]I. Borcoi, A. Mihailescu, O. Olaru, C.Vilan, Folosirea microcontroleruluiPIC 16F84 n comanda unui invertor,Sesiunea de comunicri tiinifice aUniversitii Petrol-Gaze dinPloieti, 11-13 mai 2005, BuletinulUniversitii Petrol-Gaze din Ploietivol. LVII, Seria Tehnic Nr. 2/2005,
pag. 35-38, ISSN 1221-9371.[4] I. Borcosi, O. Olaru, F. Grofu,
Comanda unui sistem de reglare aturatiei unui motor de curent continuufolosind microcontroller-ul PIC16F84, Sesiunea de comunicritiinifice a UniversitiiC.Brncui Tg-Jiu, 5-6 noiembrie2004, ISSN 1221-9371, pag.163-166.
[5] I. Borcoi, F. Grofu, Folosireamicrocontrolerului PIC 16F877 ncomanda unui invertor, Conferina cu
participare internaional Gorjeanul
n mileniul trei, Tg- Jiu, 18-19Noiembrie 2005.
communication module. The reducing ofthe command diagram is very much(missing power supply, pulse amplifiers,and so).
R E F E R E N C E S[1] I. Borcosi, A. Runceanu, C.Vilan,
Fuzzy System For The AdjustmentOf The Continuos Current MotorsRevolution,, Sesiunea de comunicritiinifice a Universitii dinPetrosani Universitaria ROPET2004 ,15-16 octombrie 2004, ISBN973-8260-69-8, pag. 151-156.
[2]A. Mihilescu, I. Borcoi, C. Vilan, Theuse of the PIC16F84 microcontrollerin some devices for rubber industry,The 5th International CarphatianControl Conference ICCC 2004,Zakopane Poland, May, 25-28, 2004.
[3] I. Borcoi, A. Mihailescu, O. Olaru, C.Vilan, Folosirea microcontroleruluiPIC 16F84 n comanda unui invertor,Sesiunea de comunicri tiinifice aUniversitii Petrol-Gaze dinPloieti, 11-13 mai 2005, Buletinul
Universitii Petrol-Gaze din Ploietivol. LVII, Seria Tehnic Nr. 2/2005,pag. 35-38, ISSN 1221-9371.
[4] I. Borcosi, O. Olaru, F. Grofu,Comanda unui sistem de reglare aturatiei unui motor de curent continuufolosind microcontroller-ul PIC16F84, Sesiunea de comunicritiinifice a UniversitiiC.Brncui Tg-Jiu, 5-6 noiembrie2004, ISSN 1221-9371, pag.163-166.
[5] I. Borcoi, F. Grofu, Folosireamicrocontrolerului PIC 16F877 ncomanda unui invertor, Conferina cu
participare internaional Gorjeanuln mileniul trei, Tg- Jiu, 18-19
Noiembrie 2005.[6] I. Borcosi, CBI a 2007- 00835, OSIM.[7] O. Olaru, I. Borcoi, M.C. Popescu, O.
Tulpan, N. Antonie, The RevolutionMeasurement Of A D.C. Machine,The Xiith Edition Of The
International Scientific Conference
7/30/2019 actionarea motorului de curent continu
14/14
Analele Universit ii Constantin Brncui din Trgu Jiu, Seria Inginerie, Nr. 1/2011
Annals of the Constantin Brncui University of Trgu Jiu, Engineering Series, Issue 1/2011
163
[6] I. Borcosi, CBI a 2007- 00835, OSIM.[7] O. Olaru, I. Borcoi, M.C. Popescu, O.
Tulpan, N. Antonie, The RevolutionMeasurement Of A D.C. Machine,The Xiith Edition Of The
International Scientific ConferenceOf The Engineering Faculty,November 23rd-24th 2007, Tg.-Jiu.
[8] O. Olaru, I. Borcoi, M. C. Popescu, O.Tulpan, N. Antonie, The revolutionmeasurement of a d.c. machine, TheXIIth Edition of the InternationalScientific Conference of theEngineering Faculty, November 23rd-24th 2007, Tg.-Jiu, ISSN 1842-4856,
pag. 263-266.
[9] Gh. Manolea, I. L Alboteanu, C.Nedelcu, Fl. Ravigan, R. Mtua,Comanda optimal a sitemelor de
poziionare cu motor de curentcontinuu, cu pierderi minime aenergiei, www:agir.ro/Buletine/252.pdf.
[10] I. Borcoi, L. Popescu, C. Tulpan, A.Dinc, C. Brndua, Device forsynchronization with phases, , TheXIIth Edition of the InternationalScientific Conference of theEngineering Faculty November 23rd-24th 2007, Tg.-Jiu, ISSN 1842-4856,
[11] Fl. Grofu, L. Popescu, Digital systemfor optical incremental encoderconnection, U.P.B. Sci. Bull., SeriesC, Vol. 69, No. 3, 2007;
[12] Fadi Halal, I. Dumitrache,Evolutionary learning of a fuzzycontroller for a mobile robot, U.P.B.
Sci. Bull., Series C, Vol. 69, No. 3,2007;[13]M. St. Vlad, V. Sgarciu, Smart processmonitoring using LABVIEW environment,U.P.B. Sci. Bull., Series C, Vol. 69, No. 3,2
Of The Engineering Faculty,November 23rd-24th 2007, Tg.-Jiu.
[8] O. Olaru, I. Borcoi, M. C. Popescu, O.Tulpan, N. Antonie, The revolutionmeasurement of a d.c. machine, The
XIIth Edition of the InternationalScientific Conference of theEngineering Faculty, November 23rd-24th 2007, Tg.-Jiu, ISSN 1842-4856,
pag. 263-266.[9] Gh. Manolea, I. L Alboteanu, C.
Nedelcu, Fl. Ravigan, R. Mtua,Comanda optimal a sitemelor de
poziionare cu motor de curentcontinuu, cu pierderi minime aenergiei, www:
agir.ro/Buletine/252.pdf.[10] I. Borcoi, L. Popescu, C. Tulpan, A.
Dinc, C. Brndua, Device forsynchronization with phases, , TheXIIth Edition of the InternationalScientific Conference of theEngineering Faculty November 23rd-24th 2007, Tg.-Jiu, ISSN 1842-4856,
[11] Fl. Grofu, L. Popescu, Digital systemfor optical incremental encoderconnection, U.P.B. Sci. Bull., SeriesC, Vol. 69, No. 3, 2007;
[12] Fadi Halal, I. Dumitrache,Evolutionary learning of a fuzzycontroller for a mobile robot, U.P.B.Sci. Bull., Series C, Vol. 69, No. 3,2007;
[13]M. St. Vlad, V. Sgarciu, Smart processmonitoring using LABVIEWenvironment, U.P.B. Sci. Bull., SeriesC, Vol. 69, No. 3, 2007.