3_Masina asincrona

of 16
-
Upload
florin-radu -
Category
Documents
-
view
239 -
download
0
Transcript of 3_Masina asincrona
-
8/6/2019 3_Masina asincrona
1/16
3. Maina asincron .
MAINA ASINCRON
Elementele constructive de baz ale mainii asincrone
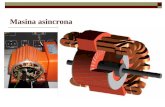
Maina asincron se compune din dou pri constructive de baz (fig. 3.1): Statorul: partea imobil care cuprinde carcasa, pachetul de tole statorice, nfurarea statoriciscuturile; Rotorul: partea mobil care cuprinde pachetul de tole rotorice, nfurarea rotoric, inelele decontact i ventilatorul.
Miezul statoric este alctuit din tole lcuite din oel electrotehnic cu grosimea de 0,3-0,5 mm.Miezul are form cilindric, iar periferia interioar a acestuia sunt practicate crestturi distribuite nmod uniform. n crestturi este introdus o nfrurare trifazat legat n stea sau n triunghi.
Miezul rotoric are tot o form cilindrici este realizat tot din oel electrotehnic, cu grosimeade 0,5 mm, uneori neizolate, fiindc frecvena de magnetizare a tolelor rotorice este foarte mic. ncrestturile de la periferia rotorului este plasat n nfurare trifazat n stea.
Inelele de contactservesc pentru a realiza legturile ntre nfurrile rotorice (care, fiind
solidare cu rotorul, se nvrtesc odat cu el) i circuitele electrice din exteriorul rotorului. Aceste inele,n numr de trei, sunt fixate pe arborele rotorului i sunt izolate unul fa de altul i fa de arbore. Lacele trei inele se leag cte unul din capetele nfurrilor de faz rotorice, capete rmase libere nurma legrii n stea a nfurrilor. Pe fiecare din cele trei inele gliseaz cte o perie din bronz-grafit.Cele trei perii sunt legate apoi la trei borne plasate ntr-o cutie de borne rotorice ale ma inii.
Un alt tip de nfurare rotoric este cel n scurtcircuit, de tipul unei colivii. n acest cazmaina asincron este numit cu rotorul n scurtcircuit sau cu rotorul n colivie.
n plus, maina asincron posed o carcas, scuturi cu paliere cu rulmeni sau de alunecare,tlpi de prindere, cutiile de borne statorici rotoric.
Fig. 3.1. Motor asincron trifazat cu inele (cu rortor bobinat):1pachet de tole statorice; 2nfurare statoric; 3pachet de tole rotorice; 4nfurare rotoric;5inele colectoare; 6portperii; 7carcas; 8scut; 9rulmeni; 10cutia cu placa de borne statorice;11plac de borne rotorice; 12capot; 13ventilator interior; 14ventilator exterior;15born de legare la pmnt.
-
8/6/2019 3_Masina asincrona
2/16
3. Maina asincron .
Principiul de funcionare. Ecuaiile motorului asincron.
Maina asincron poate funciona n regim de motor, de generator sau de frn. Se va analizamai pe larg numai regimul de funcionare ca motor electric, care prezint cea mai mare importan
practic, regimurile de generator sau de frn fiind utilizate mai rar.S presupunem deci c nfurarea trifazat statoric este conectat la o reea electric trifazat
de alimentare. Cele trei nfurri de faz vor fi parcurse de cureni cu pulsaia 1, care formeaz unsistem trifazat simetric, echilibrat. Ei vor produce un cmp nvrtitor care se rotete n sensulsuccesiunii fazelor statorului cu viteza unghiular1 = 1/p, unde p este numrul de perechi de poli aimainii. Acest cmp nvrtitor induce n nfurarea trifazat a rotorului presupus deocamdat imobil,un sistem echilibrat de trei t.e.m. Pulsaia acestora va fi: 112 == p fiindc nfurrile de fazale rotorului au acelai numr de poli ca i cele ale statorului. Considerm c nfurrile de baz alerotorului sunt legate n scurtcircuit. n aceast ipotez, cele trei t.e.m. induse vor produce trei curen icare formeaz, la rndul lor, un sistem trifazat simetric echilibrat de cureni de pulsaie . Sensulsuccesiunii fazelor la periferia rotorului va fi determinat de sensul de rota ie al cmpului nvrtitorstatoric. Dac acest cuplu este suficient de mare pentru a nvinge cuplul rezistent la arbore, rotorulncepe s se nvrteasc n sensul cmpului nvrtitor statoric. Accelerarea rotorului dureaz att timpct cuplul dezvoltat de maina asincron este mai mare dect cuplul rezistent. Maina funcioneaz n
regim de motor transformnd puterea electric absorbit de la reea n putere mecanic cedatmecanismului antrenat. S presupunem c rotorul se nvrtete cu viteza unghiular de rotaieuniform2. De data aceasta, viteza relativ a cmpului nvrtitor statoric fa de rotor este 12,iar pulsaia t.e.m. induse i a curenilor din nfurrile de faz ale rotorului va fi:
2=p(1 2) (3.1)Introducnd noiunea de alunecare, definit prin expresia
1
21
=s (3.1)
Rezult c, atunci cnd maina asincron este n funciune, pulsaia curenilor rotoricireprezint doar fraciunea s din pulsaia curenilor statorici, adic
2=s1 (3.3)
Pentru acest caz, n care se exercit un cuplu, se spune c rotorul alunec fa de cmpulnvrtitor inductor. ntocmai ca i la transformatorul electric, vom considera c acest cmp magneticnvrtitor rezultant este produs de un sistem trifazat simetric de cureni cu valoarea efectiv I, care
parcurge nfurrile fazelor statorului.Remarcm c inducia magnetic nvrtitoare a unei armturi este proporional cu numrul de
spire, cu coeficientul de nfurare kWi cu valoarea efectiv a curentului din nfurarea de faz aarmturii respective. Aceast observaie ne conduce la ideea nlocuirii fazorilor B1, B2i B (variabilin funcie de ) printr-o compunere de solenaii n care fazorul w1kw1I este n faz cu fazorul B,fazorul w1kw1I1 n faz cu fazorul B1, iar fazorul w1kw1I2 n faz cu fazorul B2, deci:
w1kw1I1 + w1kw1I2 = w1kw1I (3.5)
Relaia de mai sus este analog relaiei de compunere a solenaiilor de la transformator.
Cmpul nvrtitor rezultant se rotete cu viteza unghiular1 2 fa de rotori cu viteza1 fa destator. El induce n nfurarea statoric o tensiune electromotoare util E1, a crei pulsaie este
p1=1=2f1i a crei valoare efectiv,este:
mwkwfE
= 11112
2 (3.6)
n aceast relaie m are expresia:
mm BL
2= (3.7)
n care Bm este amplitudinea cmpului nvrtitor rezultant, iar L i reprezint lungimea axial amainii i respectiv pasul polar.
Acelai cmp nvrtitor rezultant induce ntr-o nfurare de faz rotoric o t.e.m. util E2s, a
crei pulsaie este p(1 2)=2=s1=2f2i a crei valoare efectiv este:
-
8/6/2019 3_Masina asincrona
3/16
3. Maina asincron .
mws kwfE
= 22222
2 (3.8)
Dac notm:
mwkwfE
= 22122
2
atunci:E2s=sE2 (3.9)
Pe lng cmpurile utile prezentate, exist i cmpurile de dispersie. Astfel, spirele uneinfurri de faz a statorului, parcurse de curentul I1, vor produce i un cmp de dispersie, ale creilinii unitare nu se nlnuie cu spirele nfurrilor perpendicular pe pereii crestturii, fie prin ntrefierfr a atinge fierul rotoric, fie cu spirele nfurrii care le produce, ele vor da un anumit flux total dedispersie 1 care este, evident, proporional cu curentul din nfurarea fazei considerate i n faz cuel (fig. 3.3).
Acest flux fiind sinusoidal n timp, cu pulsaia 1, induce o anumit t.e.m., a crui valoareefectiv va fi:
E1=L1I1=X1I1 (3.14)unde, L1 este inductivitatea de dispersie a nfurrii de faz statoric n raport cu rotorul,corespunztoare fluxului total 1; evident X1=L1.
n mod analog, pentru o nfurare oarecare de faz a rotorului putem defini un flux total dedispersie 2s care variaz sinusoidal n timp cu pulsaia 2=s1, fiind parcurs de curentul de fazrotoric I2. Acest flux va induce o t.e.m a crei valoare efectiv va fi:
E2s=s1L2I2=sX2I2 (3.15)unde L2 - inductivitatea de dispersie a nfurrii de faz rotoric n raport cu statorul, iar X2= 1L2.
Cu aceste date putem scrie relaiile care descriu comportarea mainii asincrone n regim demotor electric. Fie U1 tensiunea aplicat unei nfurri de faz statorice, pe care o considerm careceptor pentru reeaua trifazat de alimentare a mainii. Pentru faza statoric putem scrie ecuaia:
U1= R1I1 + jX1I1 E1 (3.15)analog ecuaiei tensiunii secundare a transformatorului, cu deosebirea c tensiunea la borne este nul(nfurarea rotoric este n scurtcircuit) i c pulsaia fazorului E2s este 2=s1, diferit deci, de cea afazorilor statorului. R2 este rezistena nfurrii rotorice a fazei considerate.
La ecuaiile (3.16) i (3.17) trebuie adugat ecuaia (3.5) corespunztoare compuneriicmpurilor magnetice nvrtitoare. ntocmai ca i la transformatoare, cderea de tensiune pe rezistenaR1 a nfurrii primare este foarte mic fa de tensiunea la borne U1, iar pe de alt parte cderea detensiune datorit dispersiilor reprezint cteva procente din t.e.m. util E2.
Aadar:U1 -E1
Sau
mw1111 kfw2
2EU = (3.18)
Fig. 3.3 Fluxurile la funcionarea n sarcin a mainii asincrone.
-
8/6/2019 3_Masina asincrona
4/16
3. Maina asincron .
Rezult c, dac tensiunea pe faz aplicat statorului este constant, fluxul corespunztorcmpului magnetic nvrtitor rezultant este practic independent de curentul statoric sau rotoric, decieste practic independent de sarcina motorului. Aadari inducia magnetic nvrtitoare rezultant Bmeste practic independent de valorile curenilor I1i I2. Evident, curenii I1i I2 variaz n funcie degradul de ncrcare al motorului, ns ei se compun geometric conform ecuaiei de solenaii i dauntotdeauna aceeai rezultant constant.
Deci ecuaia (3.5) devine:w1kw1I1 + w2kw2I2 = w1kw1I const. (3.19)n regimul n care rotorul se nvrtete cu viteza de sincronism (2=1), curentul n rotor este
nul (I2 = 0), iar curentul absorbit de stator devine I10. Din relaia (3.19) rezult c I10=I. Prin urmarecurentul de magnetizare este chiar curentul absorbit de stator, n ipoteza c rotorul se nvrtete chiarcu viteza de sincronism. Ecuaiile care descriu comportarea motorului asincron se preteaz la unelemodificri. Astfel, ecuaia (3.17) care stabilete legtura dintre fazorii I2i E2s de pulsaie 2 = s1 se
poate scrie, dup mprire cu alunecarea s i innd seama c n conformitate cu relaia (3.9),E2s = sE2, sub forma:
s
R0 2= I2 + jX2I2 E2 (3.20)
mprirea cu s, n afar de aspectul pur matematic, are o profund semnificaie fizic. Dacecuaia (3.17) corespunde unei frecvene f2 = sf (frecvena de alunecare, care are loc realmente nrotor), ecuaia (3.20) reduce fenomenele la cele care au loc ntr-un rotor n care frecven a este aceeaicu cea din stator.
n acest fel, sistemul complet de ecuaii al mainii asincrone este:
=
==
++
+=
+=
II
I-jXEkw
kwE
IkwIkwIkw
E-IjXIR
0
E-IjXIRU
10
2w22
w111
10w112w221w11
22222
111111
s (3.21)
n sfrit, ntocmai ca i la transformator, se pot raporta mrimile rotorice la numrul de spireale nfurrii statorului. Dac notm cu semnul prim () mrimile raportate la numrul de spire alenfurrii statorului se obine:
;kw
kwRR
2
w22
w1122
= ;
kw
kwII
w11
w2222 =
;kw
kwXX
2
w22
w1122
= E1;kw
kwEE
w22
w1122 == (3.22)
i deci se poate scrie:
==+
+= +=
II
III
E-IXjIR0 E-IjXIRU
10
1021
22222
111111
(3.23)
Bilanul de puteri
Din sistemul de ecuaii (3.23) rezult:U1cos1= R1I1 + E1cos1
Dup multiplicarea egalitii de mai sus cu 3I1 se obine:
3U1I1cos1= 3R1 21I + 3E1I1cos1 (3.30)
Relaia (3.30) poate fi interpretat astfel: din puterea activ P1 = 3U1I1cos1 absorbit de
-
8/6/2019 3_Masina asincrona
5/16
3. Maina asincron .
motor de la reeaua de trifazat, o parte, pe care o notm PCu1 = 3R121I se transform n cldur prin
efect Joule n nfurarea trifazat statoric, o alta PFe1 reprezint pierderile n fierul statoric, iar ceeace a rmas P = 3E1I1cos1, reprezint puterea cedat prin intermediul cmpului electromagneticceleilalte armturi, adic rotorului.
222
'22
'2Cu2 I3RI3RP == (3.33)
'22
'2M IRs
s13P = (3.34)
Se poate trage concluzia c puterea electromagnetic P primit de rotor se consum astfel: oputere PCu2 ce se transform n cldur n nfurarea trifazat rotorici ntr-o putere PM=Pm+P2 ce setransform n putere mecanic, din care o fraciune Pm acoper pierderile mecanice proprii ale mainii(frecrile n lagre, pierderile ventilatorului, frecrile rotorului cu aerul), iar cealalt fraciunereprezint puterea mecanic util P2 cedat mecanismului antrenat de motor. Pierderile n miezulrotoric PFe2 sunt neglijabile, datorit frecvenei reduse,1-2 Hz, ct i datorit materialului magnetic dincare este realizat acesta.
Din relaiile (3.31) (3.34) se deduc urmtoarele relaii energetice:
Ps
s11I3R '22
'2 =
+
i deci:sPPCu2 = (3.35)
ceea ce implic existena relaiei:PM = (1 s)P
Aadar, fraciunea s din puterea P cedat de stator rotorului se transform n timp n cldurprin efect Joule, iar fraciunea (1s) se transform n putere mecanic.
Puterea mecanic PM dezvoltat de motor poate fi exprimat i n funcie de cuplulelectromagnetic produs de rotori de viteza sa unghiular2 prin relaia:
PM = M2sau innd seama de expresia alunecrii, din care deducem c
2=(1 s)
1rezult:
PM = M1(1 s) = (1 s)Pi deci c:
P = M1 (3.37)Puterea electromagnetic cedat de stator rotorului poate fi exprimat prin produsul dintre
cuplul electromagnetic dezvoltat de motori de viteza unghiular a cmpului nvrtitor din ntrefier, nraport cu statorul (viteza unghiular de sincronism).
Din cele de mai sus, rezult o expresie a cuplului electromagnetic M de forma:
1
'22
'2
1
Cu2
1 s
I3R
s
PPM
=
=
= (3.38)
n ceea ce privete pierderile n fier menionm urmtoarele: n miezul statoric apar pierderip
Fe1prin histerezis
i curen
i turbionari, dar care sunt reduse (componenta activ
I10a
este cu mult maimic dect componenta reactiv I1), iar n miezul rotoric datorit frecvenei reduse (12 Hz) ct idatorit materialului magnetic din care este realizat acesta, pierderile pFe2 devin neglijabile.
Bilanul puterilor active pentru motorul asincron este dat de relaia:
( ) 2mCu2Cu1M'22
'2
211ff1 PPPPPIRIR3cosI3UP +++=++== (3.39)
reprezentat sugestiv n figura 3.8 n care s-au luat n considerare i pierderile de fier.Fcnd bilanul puterilor reactive se obine:
( ) QQQIXIXIX3sinI3UQ 21211m
'22
'2
211ff1 ++=++== (3.39)
unde puterile reactive necesare crerii cmpului de dispersie Q1i Q2 sunt neglijabile n comparaie
cu puterea 211m I3XQ = necesar meninerii cmpului magnetic principal, care este practic constant
de la funcionarea n gol la funcionarea n sarcin.
-
8/6/2019 3_Masina asincrona
6/16
3. Maina asincron .
Randamentul mainii asincrone are expresia:( )
UIcos3
PPPPUIcos3
P
P mFeCu2Cu1
1
2 +++== (3.40)
Maina asincron absoarbe de la reea, odat cu puterea activ P1 i o putere reactivQ1 = const. Deci, reelele care alimenteaz mai multe motoare asincrone sunt ncrcate cu un curent
reactiv, necesar magnetizrii acestormotoare care, pentru o reea dat, limiteazcomponenta activ i deci transportorul de
putere activ. Pentru creterea eficieneiliniilor de transport i scderea pierderilor de
putere activ, n reele se face compensarea puterii reactive, alimentnd motoarele cuenergie reactiv de la o surs apropiat itotodat compensnd i factorul de putere alreelei (fig. 3.9). Ca surs de putere reactivse pot utiliza baterii de condensatoare saumaini asincrone, iar motorul primete de la
reea numai puterea activ.CALCULUL ELECTROMAGNETIC AL MAINII ASINCRONE.CARACTERISTICA MECANIC
Expresia general a cuplului electromagnetic care se exercit asupra armturii rotorice lamainile trifazate de curent alternativ este dat de relaia:
1s
I3R
1s
PM
'22
'2Cu2
=
=
pe care o vom dezvolta exprimnd valoarea efectiv a curentului I2.Raportul Z1/Z0 este foarte mic n comparaie cu unitatea i deci poate fi neglijat, nct:
1,051,02X
X1Z
Z1
1
0
1
K++
Modulul curentului '2I va fi egal cu ctul modulelor numrtorului i numitorului de mai sus:
( )2' 212'
21
1'2
XXs
RR
UI
++
+
=(3.41)
Cuplul electromagnetic dezvoltat de motorulasincron rezult a fi:
( )
++
+
=
=2'
21
2'2
11
21
'2
1
'22
'2
XXs
R
Rs
U3R
s
I3RM
(3.42)
Pentru alunecarea s = 0 cuplul este nul.Pentru alunecarea teoretic s = , cuplul devine dinnou nul. Pentru intervalul teoretic posibil de variaiea alunecrii (-,+) cuplul va atinge un maxim carese poate calcula anulnd derivata expresia cupluluielectromagnetic n funcie de alunecarea s:
0ds
dM=
Fig. 3.8. Bilanul puterilor active pentru motorul asincron
Fig. 3.10. Variaia cuplului electromagnetic al mainii
generator motor frn
S=1
S
-
8/6/2019 3_Masina asincrona
7/16
3. Maina asincron .
De unde:
( )2' 2121
'2
m
XXR
Rs
++=
(3.43)
reprezint alunecarea corespunztoare extremelor funciei, numiti alunecare critic.Din analiza relaiilor si diagramelor de mai sus se observ urmtoarele: Cuplurile maxime ndeplinesc condiia MmM < MmGi sunt proporionale cu ptratul tensiunii dealimentare, dar nu depind de rezistena R2 a nfurrii rotorice;
Alunecarea critic sm nu depinde de tensiunea de alimentare, dar este proporional cu rezistenaR2 a circuitului rotoric;
Cuplul de pornire Mp se deduce din expresia (3.42) n care nlocuim s = 1;
( )[ ]2'2'212'
21211
'2
21
pRRR2XXR
R3UM
++++=
(3.46)
depinde de ptratul tensiunii de alimentare i de rezistena raportat a nfurrii rotorice.
Expresia cuplului poate fi adus la o form simpl, uor de reinut, dac de pild, considerndcazul motorului, calculm raportul cuplurilor
mM
M :
( )
mm
m
m
m s2s
s
s
s
s12
M
M
++
+=
unde am notat cu'2
1
R
R= .
Dac se neglijeaz valoarea produsului sm sm se poate neglija termenuls
sm n raport cumss
i deci:
s
sM2M mm (3.49)
adic cuplul variaz n acest domeniu practic invers proporional cu alunecarea.La cuplul nominal Mn rezult alunecarea nominal sn, iar raportul dintre cuplul maxim i
cuplul nominal are valoarea
+==
n
m
m
n
n
mm s
s
s
s
2
1
M
Mk (3.50)
denumiti capacitate de suprancrcare.
-
8/6/2019 3_Masina asincrona
8/16
3. Maina asincron .
De limitele capacitii de suprancrcare depind n mare msur condiiile de stabilitate nfuncionare a mainii asincrone. La motoarele asincrone de construcie normal, km = 1,5 3, iaralunecarea nominal sm = 0,01 0,06, valorile mai mici corespunznd la puterile mai mari.
Referindu-se la caracteristica M = f(s) a motorului asincron (fig. 3.11) se poate observa c,pentru un cuplu rezistent practic constant Mr, sunt posibile dou puncte de funcionare staionare A iB, pentru alunecri s diferite. Motorul nu poate funciona stabil dect n punctul A pe poriunea
ascendent a caracteristicii M = f(s). ntr-adevr, s presupunem c motorul funcioneaz n punctul A,dezvoltnd punctul activ M = Mri alunecarea s s mai presupunem c, dintr-un motiv oarecare cuplul
rezistent a crescut puin, devenind r'r MM > . n acel moment, deoarece cuplul rezistent este mai mare
dect cuplul activ dezvoltat de motor, rotorul ncepe s frneze i alunecarea s crete. Odat cucreterea alunecrii s crete i cuplul activ M dezvoltat de motor, iar frnarea ncepe s slbeasc, pn
cnd, la o nou alunecare s, noul cuplu activ M devine egal cu cuplul rezistent 'rM . n acel moment, procesul de frnare nceteaz i viteza de rotaie este din nou uniform, dar ceva mai mic dectnainte. Nu acelai lucru se ntmpl n punctul B, pe ramura descendent a caracteristicii M = f(s).
presupunem c motorul funcioneaz cu alunecarea s, corespunztoare punctului B i dezvolt cuplul
activ M, egal cu cuplul rezistent Mr. dac dintr-un motiv oarecare cuplul rezistent devine r'r MM > ,
atunci ncepe n mod analog un proces de frnare a motorului. Numai c, de data aceasta, n urma
frnrii, alunecarea crete, la alunecri mai mari corespunznd cupluri active mai mici dect 'rM . Prinurmare, frnarea n loc s slbeasc se intensific pn cnd motorul se oprete. Un asemenea regimde funcionare este deci instabil i conduce la oprirea funcionrii, deci la scurtcircuit.
n concluzie, pentru un cuplu rezistent constant, funcionarea motorului asincron este stabilpe poriunea ascendent a caracteristicii M = f(s), n zona alunecrilor mici (s < sm). funcionarea esteinstabil pe proiunea descendent a caracteristicii M = f(s) n zona alunecrilor mari (s > sm).
Caracteristica mecanic n = f(M) rezult din caracteristica M = f(s) aa cum se observ din
figura 3.12.ntr-adevr, dac n este viteza rotorului i n1 viteza de sincronism a mainii, rezult, conformrelaiei (3.2):
1
1
n
nns
= (3.51)
de unde:( )s1nn 1 = (3.52)
Dac lucrurile se petrec conform figurii 3.12 rezult c la pornire (s = 1) motorul asincron areun cuplu Mp relativ sczut, mai mic dect cuplul nominal Mn. prin urmare, motorul asincron nu poate
porni la sarcinnominal, ceea ce reprezint un dezavantaj n raport cu motoarele cu curent continuu.Dac ns, cuplul rezistent al mecanismului antrenat este mai mic dect cuplul de pornire al motorului(ca de pild mainileunelte care pornesc n gol), pornirea este posibil. Cuplul dezvoltat de motorcrete treptat pe msur ce motorul se accelereaz, pn la valoarea maxim Mm, iar apoi scade pnajunge la o valoare egal cu cuplul rezistent nominal.
Fig. 3.12. Caracteristica mecanic a motorului asincronFig. 3.11. Caracteristica M = f(s)
a motorului asincron
-
8/6/2019 3_Masina asincrona
9/16
3. Maina asincron .
Se remarc faptul c n zona de funcionare stabil viteza variaz foarte puin. De obicei, chiarla sarcina nominal, viteza motorului asincron nu este dect cu (110)% mai mic dect viteza desincronism. Aadar, motorul asincron are o caracteristic mecanic dur, ntocmai ca i motorul decurent continuu cu excitaie derivaie. Aceast proprietate determin i domeniul de utilizare almotorului asincron.
NCERCRILE MAINILOR ASINCRONEncercarea la funcionarea n gol
Scopul ncercrii n gol este de a constata n primul rnd execuia n ansamblu a mainii, apoide a obine datele necesare pentru determinarea pierderilor. La funcionarea n gol, zgomotul ivibraiile dau o imagine asupra procesului tehnologic de execuie a pieselor i subansamblurilor,
precum i a asamblrii generale a mainii. Curentul la funcionarea n gol este cel care d o primapreciere general privind concordana dintre valorile calculate i cele obinute experimental, dac nus-au fcut erori la prelucrarea suprafeelor care mrginesc ntrefierul.
Msurarea i separarea pierderilor la funcionarea n gol este necesar n vederea determinriirandamentului mainii asincrone n diferite condiii de funcionare.
Funcionarea mainii asincrone n gol ideal corespunde turaiei de sincronism (s = 0)
La funcionarea n gol, real, alunecarea s este foarte mic, dar s 0 i n afara de curentul I10 maicircul i curent I2 care acoper celelalte pierderi de la funcionarea n gol (cele corespunztoare
pierderilor mecanice). Maina este pornit printr-o metod adecvat (v. paragraful 3.6), conectareafcndu-se de regul, la o reea de tensiune variabil. Dup pornire, se mrete valoarea tensiunii dealimentare treptat pn la aproximativ 1,3 Uni se msoar concomitent tensiunea U10 prin voltmetrul,curenii de linie I10 i puterea absorbit P0. Se efectueaz msurtori pentru mai multe valoricresctoare i descresctoare ale tensiunii de alimentare, apoi se traseaz funcie de tensiunea de
alimentare, caracteristicile:I10 = f ( U10 ), P0 = f ( U10 ) i cos 0 = f ( U10 ).
Factorul de putere la funcionare n gol se determincu relaia (3.53) :
Variaie a acestor curbe este redat n fig. 3.15.Imediat dup efectuarea ncercrii la funcionarea ngol se msoar rezistena nfurrii statorului
pentru a determina pierderile n aceast nfurare:210110 3 IRP fw =
Pierderile n desfurarea rotoric la funcionarea ngol se pot neglija alunecare fiind foarte mic. nacest caz pierderile n fier PFe1i pierderile mecanice(de frecare i ventilaie) Pfv se determin cu relaia :
.1001 wfvFe PPPP =+ (3.54)n baza datelor obinute se ridici caracteristica).(
101 UfPP fvFe =+ (3.55)Pierderile mecanice nu depind de sarcin (pentru c ele depind exclusiv de turaia n const.)
i se determin prin extrapolarea curbei dat de relaia (3.55), aa cum se vede din figura 3.15.
ncercarea n scurtcircuit
Scopul ncercrii n scurcircuit este de a determina pierderile n nfaurri, curentul iniial depornire i cuplul iniial de pornire. Rotorul mainii este blocat (calat), iar nfurarea rotoric, dac nueste n colivie se scurtcircuiteaz la inele. Motorul se alimenteaz de la o surs reglabil, crescndtensiunea pn la tensiunea minim stabilit, apoi se ridic datele pentru 6-7 puncte, ncepnd cu
valoarea minim a tensiunii. Pentru fiecare punct se citesc concomitent tensiunea apilicat U1k,curenii de linie I1ki puterea absorbit de la reea Pk.
1010
00
3cos
IU
P=
Fig. 3.15. Caracteristicile la gol
-
8/6/2019 3_Masina asincrona
10/16
3. Maina asincron .
La ncercarea de scurtcircuit se ridic urmtoarele caracteristici)( 11 kk UfI = , )( 1kk UfP = , )(cos 1kk Uf= .
Factorul de putere se determin cu relaia:
kk
kk
IU
P
3cos = (3.56)
la care Uk, Ik sunt mrimi de linie iar U1k, I1k suntmrimi de faz.Forma de variaie a caracteristicilor la ncercarea nscurtcircuit este dat n figura 3.16.
Pierderile n nfurarea statoric lascurtcircuit se determin folosind relaia :
2111 3 kw IRP = (3.57)
n care R1 este rezistena nfurrii de faz astatorului, msurat dup ncercarea la scurtcircuit,iar I1kcurentul de faz la scurtcircuit.
Pierderile n nfurarea rotorului se aproximeaz cu relaia :
112 FewkwPPPP
=(3.58)
n care : Pk- pierderile msurate la ncercarea la scurtcircuit pentru un curent de faz I1kPw1 pierderile date de relaia (3.57), pentru un acelai curent;PFe1 pierderile n fier msurate la ncercarea n gol pentru tensiunea U10 = U1k,U1k- tensiunea aplicat la ncercarea de scurtcircuit cnd n nfurarea primar se obine curentul I1k.
ncercarea n sarcinCaracteristicile motoarelor asincrone, funcie de puterea util P2, la tensiunea i frecvena
nominal sunt :I1 = f (P2); P1 = f (P2); cos 1 = f ( P2); s = f ( P2) i = f ( P2).
Determinarea caracteristicilor de funcionare se poate face prin ncercare direct, prin calcul
sau din diagrama cercului. ncercarea direct se aplic la maini de putere mic.CurentulI1se obine ca medie aritmetic a valorilor msurate pentru fiecare punct.Puterea absorbitse msoar direct prin metoda celor dou wattmetre.
Factorul de putere se calculeaz cu formula:
.33
cos11
1
11
11
ffIU
P
IU
P== (3.59)
unde U1, I1 sunt mrimile de linie, iar U1f i I1fsunt mrimile de faz.
Alunecarea s se determin prin mai multemetode (metoda stroboscopic, metodatahometric), dar cea mai simpl i mai exactmetod este a frecvenei curenilor din nfurarearotoric ce se bazeaz pe relaia f2 = sf1.Introducnd un ampermetru de curent continuu ncircuitul nfurrii rotorice, acul aparatului vaoscila cu frecvena rotoric. Dac cu ajutorul unuicronometru se determin timpul T n secundenecesar pentru efectuarea a N oscilaii complete,frecvena curenilor va fi f2 = N/T [ Hz ] ialunecarea s rezult n procente nct se deduce:
][100 001
2
f
fs =
Randamentul (n procente) se determin prin metoda separrii complete a pierderilor :
])[1(100 001
211
P
PPPPPswfvFew
++++= (3.60)
Fig. 3.16. Caracteristicile la ncercarea la scurtcircuit
Fig. 3.17. Caracteristicile la mers n sarcin
-
8/6/2019 3_Masina asincrona
11/16
3. Maina asincron .
unde : Pw1 se determin cu relaia ( 3.57 ), PFe1i Pfv de la ncercarea de funcionare n gol,
Pw2 = sP = s [P1 ( Pw1+ PFe1 )] (3.61)
iar Ps reprezint pierderile suplimentare : Ps = 0,005P1.
n figura 3.17 se red alura acestor caracteristici.
Remarcm urmtoarele :- randamentul atinge valoarea maxim pentru (0,50,75 )P2ni are valori de 93% pentru motoare
asincrone cu putere util de peste 500 kW, de (85+91) % pentru motoare cu putere de (10 : 100) kW iscade sub 75% pentru motoare mici, sub 1 kW;
- motorul asincron absoarbe de la reeaua de alimentare un curent defazat n urma tensiuniiaplicate, ceea ce face ca ntotdeauna cos < 1. La mersul n gol factorul de putere este mic (de ordinul0,2); pe msur ce sarcina motorului crete, factorul de putere se nbuntete, atingnd valoareamaxim pentru o sarcin aproximativ egal cu puterea util nominal.
PORNIREA I INVERSAREA SENSULUI DE ROTAIE LAMOTORUL ASINCRON CU ROTORUL BOBINAT
Problemele de baz ale pornirii motorului asincron, ca de altfel ale oricrui motor n general,sunt determinate de valoarea cuplului de pornire i de ocul la oprire.
La pornire (s = 1) curentul secundari cuplul electromagnetic au expresiile :
221
221
1
2)()( XXRR
UI p
+++=
])()[(
32
212
211
221
XXRR
RUMp +++
= (3.62)
Prin introducerea unor rezistene n circuitul rotoric de valoare Rp, rezistena pe faz acircuitului secundar, raportat la primar, devine pRR +2 (fig. 3.18). n acest caz, curentul secundar de
pornirep
I2
scade, iar cuplul de pornire Mp poate crete pn la valoarea maxim. Pe de alt partevaloarea cuplului maxim Mm dezvoltat de motor nu depinde de rezistena circuitului rotoric, n schimbalunecarea corespunztoare sm este proporional cu rezistena acestui circuit. Curbele M = f(s) pentrudiferite rezistene suplimentare Rp conectate n fazele rotorului sunt indicate n figura 3.19. Se observc pe msur ce rezistena Rp crete, maximul cuplului se deplaseaz spre alunecri mai mari. Se poatealege chiar o anumit rezisten Rp pentru care la pornire (s = 1) cuplul s fie egal chiar cu cuplulmaxim (curba c din fig. 3.19). Odat cu accelerarea motorului, alunecarea scade i n acelai timp
scade i cuplul dezvoltat de motor conform curbei c,pn la o anumit valoare corespunztoare punctului A,cnd intervenim i micorm brusc rezistena Rp. Punctulde funcionare sare pe o nou caracteristic b,corespunztoare noii valori ale rezistenei pR . Rotoruleste solicitat din nou de un cuplu electromagneticsensibil mai mare dect cuplul rezistent, accelerareacrete din nou i alunecarea scade. Punctul defuncionare se deplaseaz pe caracteristica b sprealunecri mai mici, cuplul electromagnetic sczndtreptat. n punctul B intervenim din nou i micormrezistena exterioar pn la zero, nct din acest moment
punctul de funcionare se deplaseaz pe caracteristicanatural a, pn la valoarea M = Mr, cnd acceleraia
devine nul i procesul tranzitoriu de pornire ia sfrit. Prin urmare, rezistena reglabil Rp estemanevrat n timpul pornirii pentru a se asigura un cuplu mediu suficient de ridicat, pentru ca pornirea
s dureze un timp scurt. Pornirea motoarelor asincrone cu rotorul bobinat se poate face prinscurtcircuitarea treptelor reostatului de pornire cu ajutorul unor contactoare comandate de relee detimp sau de curent. Reostatele de pornire sunt rezistene metalice rcite n aer sau ulei sau rezistene
Fig. 3.19. Caracteristicile M=f(s) pentrudiferite rezisten e conectate n rotor
-
8/6/2019 3_Masina asincrona
12/16
3. Maina asincron .
Fig. 3.20. Pornirea cu autotransformator
lichide formate din plci metalice care se introduc mai mult sau mai puin ntr-o baie cu ap.Menionm c valoarea curentului de pornire se poate reduce i prin introducerea n circuitul
rotorului a unei reactane. Prin aceast metod ns scade alunecarea critic i totodat valoareacuplului maxim, nrutindu-se deci condiiile de pornire. Schimbarea sensului de rotaie se realizeaz
prin schimbarea ntre ele a dou legturi, la reeaua trifazat de alimentare. Inversndu-se succesiuneafazelor statorului, se realizeaz deci inversarea sensului de rotaie a cmpului care antreneaz rotorul.
PORNIREA MOTORULUI CU ROTORUL N COLIVIE
Conectarea direct la reeaMotoarele asincrone cu rotorul n colivie pot fi puse n funciune prin aplicarea tensiunii
nominale nfurrii statorice. Curentul iniial de pornire coincide cu curentul de scurtcircuit :
k
pZ
UI
31= (3.63)
curent a crui valoare este de 4 pn la 7 ori curentul nominal; Zk este impedana de scurtcircuit(s = 1). Acest curent de valoare mare, preluat de la reea dei nu prezint un pericol direct pentrumotor din cauza duratei de pornire relativ scurte, produce importante cderi de tensiune n reeaua dealimentare, cderi care pot deranja ali consumatori i mai ales iluminatul electric din reelele mixte,
unde puterea reelei este mic. Totodat, sunt solicitate i aparatele electrice de conectare i demsurare. Pornirea din cuplarea direct la reea este rapid i cu ocuri dinamice n elementelecinematice ale transmisiei, motiv pentru care aceste motoare au limitate ca valoare att cuplurile de
pornire ct i cuplurile maxime.n practic, conform normativelor existente pentru o pornire normaltrebuie ndeplinit condiia :
motoruluiputerea
instalatputerea
I
I
m
p
_4
_
4
3
+ (3.64)
Pornirea prin reducerea tensiunii de alimentarePrin aceast metod se urmrete reducerea curentului de pornire. Prin reducerea tensiunii de
alimentare se reduce ns i cuplul care este proporional cuptratul tensiunii aplicate.
Pornirea stea triunghi
Metoda nu se poate aplica dect motoarelor la caretensiunea reelei de alimentare corespunde funcionriimotorului cu nfurarea conectat n triunghi i pentru care lacutia de borne sunt scoase cele ase capete ale celor treinfurri de faz. Schema de principiu pentru pornire stea triunghi este dat n figura 3.20. n momentul pornirii,nfurarea se conecteaz n stea, comutatorul K2 fiind pe
pozitia 1, curentul iniial de pornire luat de la reea va fi :
Ipy =kZ
U
31 (3.65)
unde :U1-tensiunea de linie; 31U - tensiunea de faz ;Zk impedana unei faze la scurtcircuit, la n = 0 i deci s = 1.Schimbarea conexiunii nfurrii de la stea la triunghi
prin trecerea comutatorului K2 pe poziia 2 se face numai dupce turaia sa stabilizat, pentru evitarea ocului de cuplu,respectiv de curent.
Dac nfurrile ar fi conectate din primele momente alepornirii n triunghi, curentul de linie absorbit de la re ea ar fi :
Ipd =kZ
U13 =3Ipy (3.66)
adic de trei ori mai mare dect la pornirea n stea.
Dar la pornirea n stea, avnd o tensiune de alimentare redus,corespunztoare tensiunii de faz U1f = 31U , cuplul lapornire scade tot de trei ori i deci motorul nu poate porni n plinsarcin.
Fig. 3.20. Pornirea stea-triunghi
-
8/6/2019 3_Masina asincrona
13/16
3. Maina asincron .
Reducerea tensiunii de alimentarePentru reducerea curentului de pornire se poate folosi un autotransformator cobortor cu una-
dou trepte de tensiune (fig 3.21).Se nchide K1i K2 (K3-deschis) i motorul pornete cu tensiunearedus. Se nchide K2, apoi se nchide K3, alimentnd motorul la tensiunea reelei.
REGLAREA TURAIEI MOTOARELOR ASINCRONE
Din expresia general a turaiei motorului asincron:n = n1(1-s) =
p
f1 (1-s)
reiese c turaia se poate regla prin schimbarea numrului de perechi de poli, a frecvenei tensiunii dealimentare f1i a alunecrii s a rotorului fa de turaia de sincronism a cmpului nvrtitor.
Reglarea turaiei prin schimbarea numrului de poliSchimbarea numrului de poli se poate obine fie prin
utilizarea pe stator a dou nfurri distincte fiecare cu unalt numr de poli, fie prin utilizarea unei singure nfurrii conectarea diferit a prilor ei componente (fig 3.22). nfig. 3.22-a, cele dou bobine ale nfurrii sunt conectate
n serie. Maina are patru poli, iar viteza de sincronism de1500 rot/min, la f1 = 50Hz. n figura 3.22-b cele doubobine sunt conectate n paralel, maina avnd doi poli iviteza de sincronism de 3000 rot/min.
Reglarea vitezei prin variaia frecvenei f1
Modificarea frecvenei unei surse de c.a poate fiobinut cu ajutorul unui generator sincron cu vitezvariabil de rotaie sau cu convertizoare statice defrecven. Pentru alunecri s
-
8/6/2019 3_Masina asincrona
14/16
3. Maina asincron .
Astfel, dac f1 scade, fluxul m crete determinnd o saturaie puternic a miezului magnetic
al mainii, iar cnd f1 crete, m scade i nu este utilizat la posibilitile sale circuitul magnetic. Prin
urmare, pentru a nu se afecta starea de satura ie a circuitului magnetic este necesar realizareacondiiei U1/f1 = const. Cu aceast condiierelaia (3.70) devine :
M = K4 f1s (3.71)Deci, la o variaie a tensiunii de alimentarei a frecvenei ei, astfel nct raportul U1/f1se menine constant, valoarea cuplului MmMconform relaiei (3.70) este constant,caracteristicile artnd n acest caz ca nfigura 3.25.La o frecven cobort i la o tensiuneaplicat sczut, alunecarea este mai mare,deci viteza de rotaie este mai mic.Aceast metod de reglare a turaiei esteavantajoas, dar sursele de tensiune i
frecven variabile constituie investiiicostisitoare.
Reglarea turaiei prin modificarea tensiunii de alimentare
Reglnd tensiunea de alimentare U1, la acelai cuplu rezistent Mr, se obin alunecri s
-
8/6/2019 3_Masina asincrona
15/16
3. Maina asincron .
MOTORUL ASINCRON MONOFAZAT
Motorul asincron monofazat are aceeai construcie ca i motorul trifazat, cu singura deosebirec statorul posed o nfurare monofazat, care se conecteaz la o reea monofazati acoper circa2/3 din pasul polar. Rotorul, de obicei, nu este bobinat, ci este realizat n colivie (fig. 3.28).
nfurarea monofazat statoric, parcurs de un curent monofazat, produce un cmppulsatoriu sinusoidal n timp i n spaiu, care poate fi descompus n dou cmpuri nvrtitoare ce serotesc n sensuri opuse, cu aceeai vitezi amplitudine egale cu jumtate din amplitudinea cmpuluisinusoidal n timp i spaiu.
Deci n conformitate cu relaia (2.22)
B( mm BtpBt 2
1cos), == ( ) ( )++ ptBpt m cos2
1cos (3.73)
n acest mod, motorul este echivalent cu dou motoare asincrone trifazate identice, ale cror nfurriproduc cmpuri nvrtitoare identice, dar cu sensuri derotaie diferite i care au rotoarele solidare pe acelaiarbore (figura 3.29). La rndul lor, aceste doumotoare asincrone trifazate sunt echivalente cu un
singur motor trifazat cu dou nfurri statornice A iB legate n serie, dar cu succesiune rotorice, parcursede curani indui de cele dou nvrtitoare statorniceBA i BB care se rotesc n sensuri opuse, i aflate naceste cmpuri, vor fi solicitate de foreelectrodinamice. Asupra rotorului vor aciona doucmpuri electromagnetice MA i MB egale, dar desensuri contrare (fig. 3.30).
Reprezentnd cuplurile MA(Md) i MB(Mi) produse de cmpul direct, respectiv invers, nfuncie de alunecrile corespunztoare, rezult c la pornire (n=0, sd=si=1) cuplul rezultantM=Md+Mi=0 i deci motorul nu poate porni. Dac se d un impuls ntr-un sens, deci dac n 0,0 s se observ din figura 3.30 c apare un cuplu M 0 care accelereaz motorul n sensul n care s-a dat
impulsul. Dar practica cere ca motorul s aib uncuplu de pornire Mp la n=1i s=1; pentru aceasta ar fisuficient ca amplitudinea celor dou cmpuri - directi indirect s fie diferite (fig. 3.31.). Acest lucru serealizeaz fie adugnd o nfurare auxiliar pestator, fie ecrannd magnetic o spir n scurtcircuit
poriuni ale polilor mainii. nfurarea auxiliar saunfurarea de pornire decalat la periferia rotorului cuunghiul geometric /2p fa de nfurareamonofazat i este parcurs de un curent cu aceeai
valoare efectiv, dar defazat n timp cu /2 fa decurentul din nfurarea principal. n acest fel, nlocul cmpului sinusoidal n timp i spaiu se produceun cmp magnetic nvrtitor. ntr-adevr:
i1=I tcos2 , i2=I
2cos2 t
reprezentnd curenii din cele dou nfurri.
Cmpurile produse de aceste nfurri vor fi:
B1 ( ) coscos, tBt m = p B2 ( )
=
pptBt m 2
cos2
cos,
Fig. 3.28. Schema de principiu a unuimotor asincron monofazat
220 V
M
MA(Md)
M=Md+Mi
M 0
MB(Mi)
Fig. 3.30. Cuplurile mainii asincrone monofazate:Md cuplul produs de cmpul direct;Mi cuplul produs de cmpul invers ;M cuplul rezultant.
sd
2 1sd0
0
2
-
8/6/2019 3_Masina asincrona
16/16
3. Maina asincron .
Fiecare dintre aceste cmpuri se descompune ntr-un cmp nvrtitor direct i unul invers:
( ) ( ) ( )
( ) ( ) ( )
++=
++=
ptmBptmBtB
mm ptBptBtB
cos2
1cos
2
1,2
cos2
1cos
2
1,1
Se observ cum cmpurile inverse se anuleaz reciproc, iar cmpurile directe se nsumeaz,astfel nct cmpul rezultant va fi .B ( ) ( ) ( ) ( )=+= ptBtBtBt m cos,,, 21 (3.75)
adic el este un cmp nvrtitor, care asigur un cuplu de pornire, precum la motorul trifazat.O nfurare monofazat, decalat la periferia interioar a statorului n raport cu nfurarea
principal, cu un numr redus de spire, parcurs de curent (chiar mai mic) defazat fa de curentul dinnfurarea principal, produce o sl bire relativ a cmpului nvrtitor invers i o ntrire a cmpuluinvrtitor direct. La mainile asincrone monofazate, nfurarea principal ocup de obicei 2/3 dinnumrul de crestturi care revin unui pas polar, restul fiind ocupate de nfurarea auxiliar. Ambelenfurri se conecteaz la aceeai reea monofazat. Pentru defazarea celor doi cureni se conecteazn serie cu nfurarea auxiliar fie o rezisten, fie un condensator (figura 3.32). nfurarea auxiliar(de pornire) dac este calculat numai pentru timpul necesar pornirii se deconecteaz cnd turaiaajunge la 0,8 din turaia nominal.
nfurarea auxiliar cu condensator poate fi meninut, fiind conectat i n funcionareamainii, obinndu-se o mbuntire a factorului de putere. Totui, valoarea optim a capacitiicondensatorului se dovedete a fi prea mare pentru regimul normal de func ionare . De aceea, dup cemotorul a pornit, se decupleaz o parte din capacitatea legat n serie cu faza auxiliar.
Motoarele cu rezisten conectat n serie cu faza auxiliar se construiesc pentru puteri de 30200 W i se utilizeaz la frigidere, aparate medicale, etc.
Motoarele cu condensator se construiesc pentru puteri mai mari de 50 W i au o largrspndire n acionrile de puteri relativ mici i n automatizri.
K K
K1
K1
Cf
Cp(R)
a bFig. 3.32. Maini asincrone monofazate cu faz auxiliar:
a) cu condensator Cp sau rezisten R de pornire; b) cu dou condensatoare de pornire din care Cfrmne conectat
n timpul funcionrii;
M
1 ~
M1 ~
Cp1
22
1