35647253-Curs-RM2
91
CUPRINS REZISTENŢA MATERIALELOR – partea a II 6 SOLICITAREA LA ÎNCOVOIERE 6.1 Tensiuni normale la încovoierea pură a barelor drepte........................... 4 6.2 Tensiuni tangenţiale la încovoierea simplă a barelor drepte ................. 11 6.3 Lunecarea longitudinală şi împiedicarea ei. Elemente de calculul îmbinărilor ............................................................................................... 17 6.4 Tensiuni principale la încovoierea simplă a barelor drepte ................. 20 6.5 Deformaţii ale barelor drepte solicitate la încovoiere ............................ 21 6.5.1 Ecuaţia diferenţială a fibrei medii deformate....................................... 21 6.5.2 Integrarea ecuaţiei diferenţiale a încovoierii barelor drepte ................ 24 6.6 Aplicaţii........................................................................................................ 27 Teste .......................................................................................................... 31 7 TORSIUNEA LIBERĂ A BARELOR DREPTE 7.1 Generalităţi. Diagramele momentelor de torsiune. Aplicaţii ................ 34 7.2 Răsucirea barei de secţiune inelară subţire. Comportarea materialelor la torsiune...................................................................................................... 38 7.3 Răsucirea barei de secţiune circulară plină şi inelară ........................... 41 Teste ........................................................................................................... 47 8 FLAMBAJUL BARELOR DREPTE COMPRIMATE 8.1 Introducere ................................................................................................ 49 8.2 Flambajul în domeniul elastic .................................................................. 51 8.2.1 Stabilirea ecuaţiei diferenţiale şi integrarea ei ..................................... 51 8.2.2 Condiţii la limită. Formula lui Euler.................................................... 52 8.2.3 Cazurile fundamentale de flambaj ....................................................... 55 8.3 Domeniul de aplicabilitate a formulei lui Euler. Flambajul barei în domeniul plastic........................................................................................ 58 8.4 Calculul la flambaj ................................................................................... 60 Teste ........................................................................................................... 62
-
Upload
mihai-craciun -
Category
Documents
-
view
52 -
download
0
Transcript of 35647253-Curs-RM2

CUPRINS
REZISTENŢA MATERIALELOR – partea a II
6 SOLICITAREA LA ÎNCOVOIERE 6.1 Tensiuni normale la încovoierea pură a barelor drepte........................... 4 6.2 Tensiuni tangenţiale la încovoierea simplă a barelor drepte................. 11 6.3 Lunecarea longitudinală şi împiedicarea ei. Elemente de calculul
îmbinărilor ............................................................................................... 17 6.4 Tensiuni principale la încovoierea simplă a barelor drepte ................. 20 6.5 Deformaţii ale barelor drepte solicitate la încovoiere............................ 21 6.5.1 Ecuaţia diferenţială a fibrei medii deformate....................................... 21 6.5.2 Integrarea ecuaţiei diferenţiale a încovoierii barelor drepte ................ 24 6.6 Aplicaţii........................................................................................................ 27
Teste .......................................................................................................... 31
7 TORSIUNEA LIBERĂ A BARELOR DREPTE 7.1 Generalităţi. Diagramele momentelor de torsiune. Aplicaţii ................ 34
7.2 Răsucirea barei de secţiune inelară subţire. Comportarea materialelor la torsiune...................................................................................................... 38
7.3 Răsucirea barei de secţiune circulară plină şi inelară ........................... 41
Teste........................................................................................................... 47 8 FLAMBAJUL BARELOR DREPTE COMPRIMATE 8.1 Introducere ................................................................................................ 49
8.2 Flambajul în domeniul elastic.................................................................. 51 8.2.1 Stabilirea ecuaţiei diferenţiale şi integrarea ei ..................................... 51 8.2.2 Condiţii la limită. Formula lui Euler.................................................... 52 8.2.3 Cazurile fundamentale de flambaj ....................................................... 55
8.3 Domeniul de aplicabilitate a formulei lui Euler. Flambajul barei în domeniul plastic........................................................................................ 58
8.4 Calculul la flambaj ................................................................................... 60
Teste........................................................................................................... 62

Cuprins
3
9 SOLICITĂRI COMPUSE 9.1 Introducere ............................................................................................... 65
9.2 Tipuri de solicitări compuse..................................................................... 66
9.3 Calculul tensiunilor normale......................................................................... 67 9.3.1 Solicitări compuse de încovoiere cu forţă axială ................................. 67 9.3.2 Solicitări compuse de încovoiere după două direcţii ........................... 68 9.3.3 Solicitări axial excentrice .................................................................... 71
9.4 Calculul tensiunilor tangenţiale .................................................................... 72
9.5 Solicitări compuse care conduc la apariţia tensiunilor normale şi a
tensiunilor tangenţiale .................................................................................... 72 9.5.1 Teorii de rezistenţă............................................................................... 72 9.5.2 Calculul arborilor solicitaţi la încovoiere şi răsucire ........................... 75
Teste .......................................................................................................... 77
10 STUDIUL DEPLASĂRILOR PRIN METODE ENERGETICE 10.1 Introducere .............................................................................................. 78
10.2 Teorema Castigliano .............................................................................. 81
10.3 Formula Mohr Maxwell. Procedeul Veresceaghin .............................. 82
10.4 Aplicatii ................................................................................................... 85
Teste .......................................................................................................... 88
11 STUDIUL SISTEMELOR STATIC NEDETERMINATE 11.1 Grad de nedeterminare........................................................................... 90
11.2 Sisteme de bază. Sistem de ecuaţii de condiţie ..................................... 93
11.3 Metoda eforturilor ................................................................................. 94
11.4 Metoda deplasărilor ............................................................................... 96
11.5 Rezolvarea sistemelor static nedeterminate. Ridicarea nedeterminării 96
11.6 Deplasări în sisteme static nedeterminate ............................................ 98
11.7 Grinzi continue. Ecuaţia celor trei momente ....................................... 99
Teste .......................................................................................................... 102
BIBLIOGRAFIE ................................................................................................... 103

6. SOLICITAREA LA ÎNCOVOIERE
6.1 TENSIUNI NORMALE LA ÎNCOVOIEREA PURĂ A BARELOR DREPTE
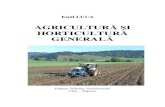
Încovoierea pură într-un singur plan (zx) este solicitarea barelor cauzată de prezenţa în secţiunile lor transversale a unui singur moment perpendicular pe axa barei (My). Acesta este cazul zonei centrale a barei din figura 6.1, a în secţiunile căreia, neglijând greutatea proprie,
N = Ty = Tz = 0 , Mx = Mz = 0 , My ≠ 0 . (6.1) Relaţia de echivalenţă (3.1)2 arată că în secţiunile transversale ale barei apar tensiuni normale σ dar nu permite determinarea acestora, întrucât nu se cunoaşte legea de distribuţie a lor, pentru a se putea efectua integrala. Pentru rezolvarea problemei se apelează la considerente de deformaţie, obţinute în urma studiului experimental.
Bara cu secţiune simetrică faţă de axa z. Se consideră că bara din figura 6.1, a este prismatică şi simetrică faţă de planul (zx). Pe această bară se consideră două secţiuni transversale 1-2 şi 3-4, materializate pe suprafaţa laterală a acesteia prin două linii directoare. Se consideră de asemenea două fibre longitudinale a-b şi c-d, evident perpendiculare pe secţiunile transversale 1-2 şi 3-4. Experimental se constată că, după aplicarea momentelor încovoietoare My , secţiunile transversale 1-2 şi 3-4 rămân plane şi normale pe fibrele longitudinale (ipoteza lui Bernoulli), adică γxy = 0. Se mai observă de asemenea că lungimile fibrelor longitudinale se modifică şi anume fibrele situate în partea inferioară a barei se lungesc iar fibrele situate în partea superioară se scurtează. Datorită continuităţii materialului este evident că există fibre, numite neutre, care nu-şi modifică lungimea. Totalitatea acestor fibre determină suprafaţa neutră a barei. Intersecţia suprafeţei neutre cu planul de simetrie (zx) determină axa sau fibra neutră a barei iar intersecţia suprafeţei neutre cu planul secţiunii transversale determină axa neutră a secţiunii, notată în figura 6.1, c cu yo. Intersecţia planelor 1'-2' şi 3'-4' determină o dreaptă, a cărei intersecţie cu planul de simetrie al barei reprezintă centrul de curbură al axei neutre a barei. Se notează cu ' ' dr s s= lungimea fibrei neutre corespunzătoare elementului dx considerat şi cu ρ raza de curbură a acestei fibre. Se mai notează cu zo distanţa de la fibra r's' până la o fibră oarecare a'b'. Sunt evidente relaţiile:
' ' d d dr s s x= = ρ θ = ; (a)
; d dab x= = ρ θ ' 'o( )da b z= ρ+ θ . (b)

Solicitarea la încovoiere
5
z
a
My = aF = const.
x
T
F
F a
z
T =
Myj Oj
σd
zz
x
z
dA
z
y
M M
σma
σmi
dρ
dx
M
F
a bc d1 3
2 4
x
a'
c'
1'
2'
r'J
b
c d
rJ sJ
a
b'
d '3'
4'
s'j
Cj yj
yj
yoj
F
Fig. 6.1
Alungirea specifică a fibrei ab,
' '
oo
dd
za b ab zab x− θ
ε = = =ρ
. (c)
În relaţia (c),
d 1 dd dx sθ θ= =ρ
(6.2)
reprezintă rotirea specifică, adică unghiul format după deformaţie între două secţiuni transversale, care înainte de deformaţie se găseau una faţă de cealaltă la distanţă egală cu unitatea. În cazul în care este necesar (la încovoierea în două plane), unghiul θ se va prevedea cu indicele axei în jurul căreia are loc rotirea secţiunii; în cazul de faţă, se va scrie θy. Datorită ipotezei lui Bernoulli şi simetriei grinzii, rezultă γzx = γxy = γyz = 0, deci τzx = τxy = τyz = 0, conform legii lui Hooke generalizate (4.103). Dacă se admite că fibrele longitudinale nu se presează reciproc, adică σy = σz = 0, rezultă că starea de tensiune într-un punct din interiorul unei bare solicitată la încovoiere pură este o stare monoaxială, determinată de tensiunile

REZISTENŢA MATERIALELOR 6
ox
zE Eσ = σ = ε =ρ
. (d)
Introducând (d) în prima relaţie de echivalenţă (3.1) se obţine
odA
z A 0=∫ , (6.3)
ceea ce înseamnă că axa yo este centrală, adică trece prin centrul de greutate C al secţiunii. Rezultă că fibra medie deformată coincide cu axa barei iar axa neutră a secţiunii trece prin centrul de greutate al acesteia (zo ≡ z), adică relaţiile (c) şi (d) pot fi scrise sub forma:
dd
z zxθ
ε = =ρ
; zEσ =ρ
. (6.4)
Înlocuind (6.4) în a treia relaţie de echivalenţă (3.1) se obţine
dA
yz A 0=∫ , (6.5)
de unde rezultă că axele y şi z sunt axe centrale principale de inerţie. Din a doua ecuaţie de echivalenţă (3.1), în care se face înlocuirea (6.4), rezultă
dy yA
z EM E z A I= =ρ ρ∫ ,
sau
1 y
y
MEI
=ρ
. (6.6)
Relaţia (6.6) exprimă curbura fibrei medii deformate a barei în funcţie de momentul încovoietor My şi de rigiditatea la încovoiere a barei, EIy . Din (6.4) şi (6.6) rezultă relaţia
y
y
Mz
Iσ = , (6.7)
numită formula lui Navier. Conform acestei formule, într-o secţiune solicitată de momentul încovoietor My , tensiunile normale variază liniar cu z. Din relaţia (6.7) şi din reprezentarea ei grafică (fig. 6.1, d) se observă că
max maxy
y
Mz
Iσ = ; min min
y
y
Mz
Iσ = . (6.8)
Dacă My > 0, tensiunile extreme trebuie să satisfacă relaţiile ; max atσ ≤ σ min acσ ≤ σ . (6.9)
Pentru materiale cu comportări identice la tracţiune şi compresiune ( ), din at ac aσ = σ = σ (6.8) şi (6.9) rezultă
ya
y
MW
≤ σ , (6.10)
unde mărimea geometrică Wy este modulul de rezistenţă al secţiunii faţă de axa y,

Solicitarea la încovoiere
7
max
yy
IW
z= . (6.11)
Cu ajutorul relaţiei de definiţie (6.11) şi expresiilor obţinute pentru momentele de inerţie ale unor suprafeţe simple, se pot determina cu uşurinţă modulele de rezistenţă ale acestora. Astfel, pentru un dreptunghi având laturile b şi h (v. figura 2.2, a),
3 2/12/ 2 6y
bh bhWh
= = . (6.12)
Pentru secţiunea circulară de diametru d,
4 3/ 64/ 2 32y
d dWd
π π= = . (6.13)
Pentru secţiunea inelară de diametre D şi d = αD , (α < 1),
4 4 3
42 (1 )64 64 32yD d DW
D⎛ ⎞π π π
= − = −α⎜ ⎟⎝ ⎠
. (6.14)
Pentru secţiunile transversale ale profilelor laminate standardizate, modulele de rezistenţă sunt date în tabele. Se atrage atenţia asupra faptului că, spre deosebire de momentele de inerţie, modulele de rezistenţă ale suprafeţelor compuse nu pot fi calculate prin însumarea modulelor de rezistenţă ale figurilor componente. Astfel, pentru secţiunea inelară, modulul de rezistenţă este dat de formula (6.14) obţinută pe baza relaţiei de definiţie (6.11) şi nu trebuie calculat prin scăderea a două module de rezistenţă date de (6.13), adică
3 4 3
4132 32 32yD d D dW
D⎛ ⎞π π
= − ≠ −⎜ ⎟⎝ ⎠
3π . (6.15)
În cazuri particulare, cum este cel prezentat în figura 6.2, a, se poate lua
( )y y ii
W W=∑ . (6.16)
Acest lucru este posibil doar când centrele de greutate ale tuturor figurilor componente se află pe axa centrală principală de inerţie a secţiunii, iar zmax pentru fiecare figură componentă este acelaşi cu zmax al întregii secţiuni. Datorită distribuţiei liniare a tensiunilor, (figura 6.1, d) fibrele longitudinale ale barelor încovoiate sunt solicitate neuniform şi anume, în fibrele extreme tensiunile au valori extreme iar în celelalte fibre tensiunile descresc liniar în modul, până la zero (în fibrele neutre). O proiectare raţională impune ca cea mai mare parte a materialului să fie situată la extremităţile secţiunii, ceea ce determină creşterea modulului de rezistenţă Wy. Acest lucru se observă din relaţia (6.11) în care la numărător figurează momentul de inerţie al secţiunii. Astfel, secţiunea inelară din figura 6.3, b este mult mai raţională din punct de vedere al rezistenţei la încovoiere decât secţiunea circulară plină din figura 6.3, a.

REZISTENŢA MATERIALELOR 8
Fig. 6.2
z z
y1
y2
z z
y1
y2 Cy1
y2y3
z z
z
( )( )
1
1
2
2y y
z z
W W
W W
=
≠
a b c
( )( )
1
1
2
2y y
z z
W W
W W
≠
=
( )
( )
3
1
3
1
y y ii
z z ii
W W
W W
=
=
≠
≠
∑
∑
zz
y
z
y
C
C
Cy
C
De asemenea, secţiunile în formă de „ I “ (figura 6.3, d) sunt mult mai raţionale în raport cu cele dreptunghiulare pline (figura 6.3, c). Rezultă că secţiunile profilelor laminate izolate sunt mai eficiente din punct de vedere al rezistenţei la încovoiere decât secţiunile pline cum sunt cele circulare, pătrate, etc. Din relaţia (6.11) se mai observă că modulul de rezistenţă scade cu creşterea lui zmax. Aceasta înseamnă că îndepărtarea materialului de axa neutră trebuie realizată cu grijă astfel încât creşterea modulului de rezistenţă pe seama sporirii momentului de inerţie al secţiunii să nu fie anulată sau chiar să devină negativă din cauza creşterii exagerate a lui zmax, aşa cum se întâmplă la secţiunea din figura 6.3, e, care are Wy mai mic decât cel din figura 6.3, d. La o astfel de secţiune proeminenţele dublu haşurate înrăutăţesc rezistenţa barei, ele trebuind deci evitate. Acelaşi lucru se poate spune şi despre secţiunile reprezentate în figura 6.3, f şi g. Eficienţa unei secţiuni din punct de vedere al rezistenţei poate fi apreciată după mărimea
2
3y
y
WW
A= (6.17)
care poate fi numită modulul de rezistenţă specific. Astfel, dacă se compară secţiunea din figura 6.3, a cu cea din figura 6.3, b, se constată că ( ) ( )y yb a
W W> .
Aceasta înseamnă că la aceeaşi arie a celor două secţiuni, în cazul b se realizează un modul de rezistenţă mai mare decât în cazul a, sau la acelaşi modul de rezistenţă a celor două secţiuni, cea inelară are o arie mai mică decât cea circulară.
În tabelul 6.1 se dau valorile modulului de rezistenţă specific pentru câteva tipuri de secţiuni. Aprecierea eficienţei secţiunilor din punct de vedere al rezistenţei se mai obişnuieşte să se facă cu ajutorul coeficientului CW = Wy / (Ah) , (6.18) calculat de asemenea în tabelul 6.1.

Solicitarea la încovoiere
9
Tabelul 6.1
Dreptunghiulară Inelară Profil „ U “
Profil „ I “
Circulară Pătrată α = 1,5 α = 2 α =
0,8 α = 0,9 U5 U30 I8 I40
Wy 1316π
1336
336
hb
( )21316+απ
0,271 0,303 0,347 0,381 0,376 0,402
0,678 1,121 0,955 1,091
CW 0,125 0,167 0,205 0,226 0,298 0,303 0,322 0,309
σa
a b c d e f g h
aa/9
e2
e1
0,1d
σa
Fig. 6.3
Pentru materiale cu comportare diferită la tracţiune şi compresiune, secţiunile simetrice nu mai sunt economice deoarece atunci când în una din fibrele extreme se atinge rezistenţa admisibilă, în fibrele extreme opuse tensiunea poate depăşi sau poate fi mai mică decât rezistenţa admisibilă. În astfel de cazuri se folosesc secţiuni nesimetrice faţă de axa neutră, cum este secţiunea în formă de „ T “ sau „ I “ cu tălpi neegale. De exemplu, în cazul fontei, la care σac ≈ (3…4)σat , o secţiune în formă de „ T “ va trebui să fie astfel realizată încât
2
1
ac
at
ee
σ=σ
= (3…4) , (6.19)
având grijă ca grinda să fie dispusă în aşa fel încât în talpă să apară tensiuni de întindere (figura 6.3, h). Ca şi la solicitarea axială, problemele care apar în practică pot fi de dimensionare, verificare sau calcul al încărcărilor capabile. Pentru materiale cu comportare identică la întindere şi compresiune, rezolvarea acestor probleme se face cu relaţia (6.10). a) Problema de dimensionare. În acest caz, pentru o secţiune de formă dată, se determină
dim
dim
max
yy
IW
z= (6.20)
în funcţie de un parametru geometric al secţiunii, valoarea acestui parametru rezultând din condiţia
dim maxynecy y
a
MW W= ≥
σ . (6.21, a)

REZISTENŢA MATERIALELOR 10
b) Problema de verificare. Se verifică dacă este satisfăcută, cât mai raţional, relaţia
maxmax
yefaef
y
M
Wσ = ≤ σ . (6.(6.21, b)
c) Momentului încovoietor capabil al secţiunii se obţine din
efy acap yM W= σ , (6.(6.21, c)
după care se determină încărcările capabile din relaţia
maxy y capM M= ,
unde |My|max se stabileşte în funcţie de încărcări, din diagrama de momente.
Bara cu secţiune nesimetrică. În cazul barelor drepte, prismatice, cu secţiuni nesimetrice, este necesar să se determine mai întâi axele centrale principale ale secţiunii. Fie y şi z aceste axe şi My momentul încovoietor care acţionează după axa Cy (figura 6.4, a).
z
a) b)
z
y
yo zo
My
Ojα
zo
C Cj
ay
Fig. 6.4
Secţiunea neavând axă de simetrie se presupune că axa neutră a fiecărei secţiuni, yo , este decalată cu a şi face un unghi α cu axa principală y. Pe baza ipotezei secţiunilor plane şi a legii lui Hooke, distribuţia tensiunilor se determină cu relaţia (d), în care
. (e) o ( ) cos sinz z a y= − α − α
Înlocuind (e) în (d) şi apoi în (3.1)1,3,2 , rezultă
[ ]
[ ]
[ ]
( ) cos sin d 0
( ) cos sin d 0
( ) cos sin d
A
A
yA
E z a y A
E z a y y A
E z a y z A M
⎫− α − α = ⎪ρ ⎪
⎪⎪− α − α = ⎬ρ ⎪⎪
− α − α = ⎪ρ ⎪⎭
∫
∫
∫
. (f)
Din prima relaţie (f) rezultă a = 0, adică axa neutră yo trece prin centrul de

Solicitarea la încovoiere
11
greutate al secţiunii. Întrucât axele y şi z sunt principale, Iyz = 0 şi din a doua relaţie de echivalenţă (f) se obţine sin α = 0, adică axa neutră coincide cu direcţia vectorului moment, care este direcţie principală de inerţie. Din ultima relaţie (f) se obţine formula (6.7), prin urmare orice formă ar avea secţiunea transversală a unei bare drepte prismatice, formula lui Navier este aplicabilă, cu condiţia ca direcţia vectorului moment încovoietor să coincidă cu una din axele centrale principale de inerţie ale secţiunii.
6.2 TENSIUNI TANGENŢIALE LA ÎNCOVOIEREA SIMPLĂ A BARELOR DREPTE
Se numeşte încovoiere simplă solicitarea cauzată de existenţa în secţiunile transversale ale barei a unui moment încovoietor dirijat după una din axele principale de inerţie şi a unei forţe tăietoare dirijată perpendicular pe direcţia pe care acţionează momentul încovoietor. Rezultă că încovoierea simplă este solicitarea cauzată de forţe exterioare perpendiculare pe axa barei şi situate într-un plan care conţine una din axele principale de inerţie ale secţiunii transversale. Prezenţa în secţiune a forţei tăietoare indică existenţa tensiunilor tangenţiale, astfel încât în afară de ecuaţiile de echivalenţă utilizate la punctul precedent este necesar a se avea în vedere şi celelalte trei ecuaţii de echivalenţă din (3.1):
; dyxA
Aτ =∫ 0 dzx zA
A Tτ =∫ ; ( )dzx yxA
y z A 0τ − τ =∫ . (6.22)
Bare cu secţiune plină. Aplicaţii
Se consideră o bară prismatică cu secţiune plină, simetrică faţă de un plan longitudinal (figura 6.5). În secţiunile x şi x + dx ale barei acţionează forţele tăietoare Tz şi momentele încovoietoare My şi My + dMy . Prima şi a treia relaţie din (6.22) pot fi satisfăcute numai dacă τyx şi τzx sunt fie nule, fie simetric dispuse faţă de axa de simetrie Cz. Întrucât Tz ≠ 0, din relaţia a doua din (6.22) rezultă τzx ≠ 0. Această concluzie este în contradicţie cu ipoteza secţiunilor plane (ipoteza lui Bernoulli) utilizată la încovoierea pură a barelor conform căreia γzx = 0 → τzx = 0. În cele ce urmează se va considera aplicabilă formula lui Navier (bazată pe ipoteza lui Bernoulli) pentru calculul tensiunilor normale, urmând ca ulterior să se stabilească limitele de valabilitate ale acesteia. Pentru determinarea tensiunilor τzx se introduc noi ipoteze şi se utilizează unele rezultate din Teoria elasticităţii. Tensiunea tangenţială care acţionează pe un element de arie a secţiunii transversale situat în vecinătatea conturului se descompune într-o componentă tangentă la contur τsx şi alta normală la contur τnx. Întrucât pox = 0 (nu există încărcări pe suprafaţa laterală a barei), conform dualităţii tensiunilor tangenţiale, rezultă τnx = 0 (fig. 6.5, c), adică tensiunile tangenţiale au direcţia tangentă la contur în punctele din secţiune situate în vecinătatea acestuia. Pentru ca tensiunile tangenţiale să poată fi determinate din ecuaţiile de echivalenţă este necesar să se cunoască legea de distribuţie a acestora în secţiune. În acest sens, Jurawski a făcut ipoteza că direcţiile tensiunilor tangenţiale din punctele secţiunii situate pe o paralelă la axa y sunt concurente într-un punct J situat

REZISTENŢA MATERIALELOR 12
pe axa z iar componentele pe z ale acestor tensiuni sunt egale, (τzx) z = const. = const.
a
M
C
y
z
x
b c
TσxdτyxdA
τzxd
A
x
pox1 τnx1
z x x + dx
My My + dMy
T
T
d
C
z
y
τzx
J
B2
τsx
τyxB1
As
N
x
y
N
dx
z
z
x
z N2Ai =
f
e
n1
.τzxz
N1
τxz1
b(z
τxz1 y1
C
C
.τzx
τsx1
B1B2
D2D1
Fig. 6.5
Poziţia punctului J se determină cu uşurinţă ducând tangente la contur în BB1 şi B2B (figura 6.5, d). Din această ipoteză rezultă că într-adevăr tensiunile τyx şi τzx sunt repartizate în secţiune simetric faţă de axa z, astfel încât relaţiile de echivalenţă (6.22)1, 3 sunt identic satisfăcute. Tensiunile τzx se determină din ecuaţia de echilibru a oricăruia din elementele izolate ca în figurile 6.5, e sau 6.5, f. În aceste reprezentări s-au notat cu N1 , N1
' rezultantele tensiunilor normale care acţionează pe suprafeţele As respectiv Ai în secţiunea x şi cu N2 , N2
' rezultantele tensiunilor normale de pe suprafeţele As respectiv Ai din secţiunea x + dx,
min
'1 1
( ) ( )d d ,
s
zy y s
x yy yA z
y iy
y
M S A S AN A z A M N M
I I I= σ = = =∫ ∫ ;
'2 2
( ) ( )( + d )d ( d ) , ( d )
s
y s y ix x y y y y
y yA
S A S AN A M M N M M
I I= σ σ = + = +∫ .
Ţinând seama că dMy = Tz dx, rezultanta forţelor N1 , N2 are expresia

Solicitarea la încovoiere
13
2 1
( )d z y s
ly
T S AN N N
I= − = dx
=
(6.23)
şi se numeşte forţă elementară de lunecare. Din ecuaţia de echilibru a elementului din figura 6.5, f,
, ( )d d 0xz lb z x Nτ +rezultă
( )
( )z y s
xzy
T S Ab z I
τ = − . (a)
Întrucât Sy(As) + Sy(Ai) = Sy = 0 iar Sy(Ai) > 0, rezultă că Sy(As) < 0, astfel încât tensiunile tangenţiale τxz sunt pozitive pe faţa pozitivă a secţiunii BB1B2B D1D2 , evident pentru Tz > 0 (figura 6.5, f). Dacă s-ar fi scris ecuaţia de echilibru a elementului din figura 6.5, e ar fi rezultat
( )
( )z y i
xzy
T S Ab z I
τ = . (b)
Notând Sy(z) = Sy(Ai) = – Sy(As) şi având în vedere principiul dualităţii tensiunilor tangenţiale, relaţiile (a) şi (b) se pot scrie sub forma
( )
( )z y
xz zxy
T S zb z I
τ = τ = , (6.24)
care reprezintă formula lui Jurawski. Sensurile pozitive ale tensiunilor tangenţiale τxz şi τzx sunt aceleaşi cu cele convenite în Teoria elasticităţii. În relaţia (6.24), Tz reprezintă forţa tăietoare din secţiunea transversală în care se calculează tensiunile τzx , Iy este momentul de inerţie al ariei secţiunii transversale în raport cu axa neutră a acesteia, b(z) este lăţimea secţiunii, măsurată pe paralela la axa y dusă în punctul în care se calculează tensiunea τzx , iar Sy(z) este modulul momentului static în raport cu axa neutră al oricăreia din porţiunile secţiunii transversale, separate de dreapta z = const. Tensiunile tangenţiale τzx determinate cu relaţia (6.24) satisfac şi ecuaţia a doua de echivalenţă din (6.22). Într-adevăr, înlocuind (6.24) în membrul stâng al celei de a doua relaţii din (6.22) şi efectuând integrala prin părţi se obţine
( )
( )d( )
z yz
yA
T S zb z z T
b z I=∫ . (6.25)
Deşi s-a stabilit pentru bare prismatice, formula lui Jurawski este valabilă şi pentru bare cu variaţii lente ale secţiunii. După determinarea lui τzx , tensiunea tangenţială totală în orice punct se poate calcula cu relaţia τx = τzx / cos α, unde α este unghiul format de axa z cu dreapta dusă prin punctul respectiv şi punctul lui Jurawski notat cu J (figura 6.5, d). Din relaţia (6.24) se observă că tensiunile tangenţiale τzx (= τxz) sunt dependente de x prin Tz şi de z prin raportul Sy(z) / b(z).

REZISTENŢA MATERIALELOR 14
În cele ce urmează se vor determina şi reprezenta grafic tensiunile τzx pentru câteva tipuri de secţiuni pline. a) Secţiune dreptunghiulară. Se calculează Sy(z) (figura 6.6, a),
2 2
2
1 4( ) 12 2 2 8yh h bhS z b z z
h⎛ ⎞⎛ ⎞ ⎛ ⎞= − + = −⎜ ⎟⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠ ⎝ ⎠
z . (6.26)
Ţinând seama şi de expresia (2.15) pentru Iy , rezultă
2 2
max3 2
12 4 41 18
zzx
T bh z zb bh h h
⎛ ⎞ ⎛ ⎞τ = − = τ −⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠
2
2 , (6.27)
unde
max 1,5 zTA
τ = . (6.28)
z
T
y
τz
τma
max 1,5 zTA
τ =
τz
z
z
b
y
h/2
zh/2
a b c
Fig. 6.6
b) Secţiune circulară. Având în vedere expresiile (2.25) şi (2.30) obţinute la capitolul 2 pentru Iy şi Sy(z), rezultă
3 3 2
2max4 2
64 sin 4 4sin 1sin 12 3
z zzx
T D TD D A D
⎛ ⎞ατ = = α = τ −⎜α π ⎝ ⎠
z⎟ , (6.29)
unde
max43
zTA
τ = . (6.30)

Solicitarea la încovoiere
15
z
T
y
τz
max43
zTA
τ =
τz
2α.z
Fig. 6.7
c) Secţiune triunghiulară. Se determină mai întâi elementele geometrice care intervin în relaţia (6.24).
z
h/6
b / 2
y
τz
h/3max 3
2z
zxTA
τ =
τz
b / 2
τ
z.τyx
Fig. 6.8
Se calculează Sy(z) (figura 6.8),
1 2 1 2( ) ( )2 3 3 3yS z b z h z z h z⎡ ⎤⎛ ⎞ ⎛ ⎞= − +⎜ ⎟ ⎜ ⎟−⎢ ⎥⎝ ⎠ ⎝ ⎠⎣ ⎦
.
Având în vedere şi (2.16), , se obţine 3 / 36yI bh=
2 1123 3
zzx
T zbh h h
⎛ ⎞⎛τ = − +⎜ ⎟⎜⎝ ⎠⎝
z ⎞⎟⎠
;
( )max
61,5 z
hzx zx z
TA=
τ = τ = , max max
2yx zxbh
τ = τ , (6.31)
( ) ( )22 2max max
max 21,5 14
zzx yx
T bA h
τ = τ + τ = + . (6.32)
Din exemplele prezentate mai sus se poate trage concluzia că tensiunile tangenţiale τzx sunt nule pentru |z| = max., adică acolo unde |σ| = max. şi sunt maxime în zona situată în apropierea axei neutre. Tensiunile τmax trebuie să îndeplinească evident condiţia

REZISTENŢA MATERIALELOR 16
maxz
aA
TC A
τ = ≤ τ , (6.33)
unde τa reprezintă tensiunea tangenţială admisibilă, τa ≈ (0,5...0,6)σa iar CA un coeficient adimensional, subunitar, care ţine seama de neuniformitatea distribuţiei tensiunilor tangenţiale pe secţiune. Datorită variaţiei pe înălţime a tensiunilor tangenţiale τzx în secţiunile transversale ale barei, rezultă că aceste secţiuni se vor deplana, aşa cum rezultă din figura 6.9, a. În figura 6.9, b sunt reprezentate două secţiuni infinit apropiate, deformate conform ipotezei lui Bernoulli iar cu linii punctate deformatele reale, ţinând seama de deplanările produse de existenţa tensiunilor tangenţiale. Având în vedere modul în care a fost obţinută, rezultă că formula lui Navier este afectată de abaterea de la ipoteza lui Bernoulli numai în măsura în care două secţiuni vecine au deplanări diferite. Prin urmare, în cazul Tz = const., formula lui Navier este exactă. Pentru Tz variabil, abaterile lui σ faţă de valorile obţinute cu formula lui Navier sunt cu atât mai mici cu cât l / h este mai mare (l = lungimea, h = înălţimea grinzii). Într-adevăr, fie o grindă dreaptă solicitată de un sistem oarecare de sarcini situate în planul xz. Se notează momentul încovoietor maxim şi forţa tăietoare maximă cu My
max = βM ql2
respectiv Tzmax
= βT ql , unde l este lungimea grinzii, q este o sarcină de referinţă iar βM , βT coeficienţi numerici ce depind de modul de distribuţie al încărcărilor. Dacă se calculează raportul dintre σmax şi τmax , ţinând seama şi de relaţiile (6.18), (6.33), se obţine
max
maxmax
max
y Wz T
A Ay
W CTC A C lM
τ β= =
σ βM
h . (6.34)
z
γzx=
maxzxτ
maxzxγ
maxzxτ
maxxzτ
a
γ
θ
θ
θ + dθ
γ max + dγ
θ + dx
d
b
τzx=
Fig. 6.9
Rezultă că raportul dintre τmax şi σmax este de acelaşi ordin de mărime cu raportul h / l. De exemplu, la grinda din figura 6.10, pentru care βT = 1 şi βM = 0,625, având secţiunea dreptunghiulară cu CA = 1/1,5 şi CW = 0,625 (v. tabelul 6.1), se obţine
max
max
0,167 1 0,40,67 0,625
h hl l
τ= =
σ . (6.35)
Pentru grinzi pline, cu raportul h / l < (1/3…1/4), se poate considera că este

Solicitarea la încovoiere
17
totdeauna satisfăcută condiţia (6.33). Pentru evaluarea ordinului de mărime al erorii maxime care apare la utilizarea formulei lui Navier în cazul încovoierii simple a barelor drepte, se calculează raportul dγmax / dθ . Ţinând seama de (4.103), (6.2), (6.6), (6.33) şi (4.104) şi notând Iy = CI Ah2, se obţine relaţia
2 2
max2 2
d d 2(1 ) 2,6d d
z I I
A M A
T EC Ah CC A E ql x C l
γ + ν= =
θ β M
hβ
, (6.36)
din care rezultă că pentru valori ale raportului l / h mai mici decât 3 apar abateri sensibile de la ipoteza lui Bernoulli, deci utilizarea formulei lui Navier oferă doar o estimare aproximativă.
q ql / 2
l / 2 l / 2
Fig. 6.10
La p. 4.5.1.1 s-a definit forfecarea pură, ca fiind solicitarea cauzată numai de tensiuni tangenţiale. Solicitarea cauzată de tensiuni tangenţiale, care acţionează concomitent cu tensiuni normale, se numeşte forfecare. Această stare de solicitare apare în elementele îmbinărilor demontabile sau nedemontabile. De obicei în calculul acestor elemente tensiunile tangenţiale se consideră distribuite uniform pe secţiune.
6.3 LUNECAREA LONGITUDINALĂ ŞI ÎMPIEDICAREA EI. ELEMENTE DE CALCULUL ÎMBINĂRILOR
În cazul în care Tz ≠ 0, deci My variază cu x, tensiunile σx care apar în două secţiuni vecine sunt evident diferite. Dacă se calculează rezultanta tensiunilor care acţionează la extremităţile unui element izolat din bară, având lungimea dx şi aria secţiunii A(z), se obţine forţa de lunecare elementară (v. figura 6.5, e şi relaţia (6.23))
( )
d dz yl
y
T S zN x
I= , (6.37)
căreia i se opun tensiunile tangenţiale τxz ce acţionează pe suprafaţa b(z)dx (figura 6.5, e). Aceste tensiuni evidenţiază interacţiunea celor două elemente, separate de planul z = const., elemente care au tendinţa de a luneca unul peste celălalt. Forţa de lunecare ce apare pe o lungime 2l x x1= − este dată de relaţia
2
1
2
( ) ( )d ( )d [ ( )
xy y
l l z y yy yl x
S z S zN N T x x M x M x
I I= = = −∫ ∫ 1( )] . (6.38)
Dacă pe intervalul l, Tz(x) are o variaţie neînsemnată, forţa de lunecare se poate calcula cu relaţia

REZISTENŢA MATERIALELOR 18
( )y
l zy
S z lN T
I= . (6.39)
Evident forţele de lunecare maxime apar în acele plane xy în care momentele statice ce intervin în relaţiile (6.39) au valori maxime. În cazul în care legătura dintre două elemente longitudinale ale unei grinzi compuse nu este suficient de rezistentă (cum se poate întâmpla la îmbinări slabe), aceste forţe de lunecare nu mai pot fi preluate de tensiunile tangenţiale paralele cu axa x şi legătura dintre fibrele longitudinale în contact ale elementelor îmbinate dispare. Ca urmare, caracterul încovoierii se schimbă, fiecare element deformându-se independent.
F
a
τA
σ
( )maxaσ
b
hh
hh
F( )maxbσ
b
l
d
Nl
σx +
l/
Fig. 6.11
Pentru a ilustra cele prezentate mai sus se consideră o bară alcătuită dintr-un pachet de n platbande, fiecare platbandă având dimensiunile secţiunii transversale b×h. a) Dacă platbandele nu sunt îmbinate, ele se deformează in-dependent, două suprafeţe în contact ale platbandelor alunecând una peste cealaltă, ca în figura 6.11, a. Tensiunile maxime care apar în platbande se calculează cu relaţia
( )max 2 2
6 6a Fl Fln bh nbh
σ = = . (6.40)
b) Dacă platbandele sunt solidarizate între ele (de exemplu prin m buloane dispuse la distanţa l / m unul de celălalt), ansamblul se comportă la încovoiere ca o singură grindă (figura 6.11, b), tensiunile maxime calculându-se cu relaţia
( )max 2
6( )
b Flb nh
σ = . (6.41)

Solicitarea la încovoiere
19
Rezultă că tensiunile în varianta b) sunt de n ori mai mici decât în varianta a). Dacă se calculează forţa maximă care poate fi aplicată barei se observă că
, adică prin solidarizarea grinzilor suprapuse şi împiedicarea lunecărilor longitudinale se obţin grinzi mai rezistente.
( ) ( )max max
bF nF= a
Împiedicarea lunecărilor longitudinale se realizează în practică prin diverse procedee şi anume: prin lipire sau sudare, prin buloane, nituri, pene, etc. Elementele de solidarizare sunt solicitate la forfecare de forţa de lunecare determinată cu relaţiile (6.37), (6.39). Astfel pentru cazul considerat mai sus, tensiunile maxime care apar în secţiunile transversale ale buloanelor se calculează cu relaţia
43
lf
b
NA
τ = , (6.42)
unde Nl este forţa de lunecare longitudinală preluată de un bulon iar Ab este aria secţiunii transversale a acestuia. Înlocuind Nl cu ajutorul expresiei (6.39) rezultă
2
3 2 2
( )4 4 2 48
( )312
f
b nh lF F lmb nh d m d n
τ = =π π h
. (6.43)
Relaţia obţinută permite determinarea diametrului d al buloanelor.
C
Ap
ls
y
e
z
a
ls
a
Ap
As
Fig. 6.12
Grinzile compuse sudate sunt formate de regulă dintr-una sau mai multe inimi, sudate de una sau două platbande (figura 6.12). Sudura poate fi întreruptă, ca în figura 6.12, sau continuă. Forţa de lunecare ce apare pe suprafaţa de contact a platbandei cu inima are, pe lungimea e, valoarea
( )p
yl z
y
S eN T
I= . (6.44)
Secţiunea minimă a cordoanelor de sudură care preiau forţa de lunecare Nl este 2ae în cazul sudurii continue şi 2als în cazul sudurii întrerupte. Egalând forţa de

REZISTENŢA MATERIALELOR 20
lunecare longitudinală cu forţa capabilă a fi preluată prin forfecare de cordoanele de sudură rezultă:
– sudură continuă: ( )
2p
yz a
y
S eT a
I= τ s e ; (6.45)
– sudură întreruptă: ( )
2p
yz as
y
S eT a
I= τ sl . (6.46)
Relaţia (6.45) serveşte la determinarea grosimii sudurii,
( )
2
pz y
as y
T Sa
I=
τ . (6.47)
Atunci când rezultă pentru a valori prea mici în comparaţie cu grosimea tablelor de îmbinat, se recurge la sudură intermitentă. În acest caz a se alege din considerente tehnologice iar din (6.46) rezultă
( )
2
pz ys
as y
T Sle a I=
τ . (6.48)
Dacă se impune ls rezultă e şi invers.
6.4 TENSIUNI PRINCIPALE LA ÎNCOVOIEREA SIMPLĂ A BARELOR DREPTE
În barele drepte supuse la încovoiere simplă apar simultan tensiuni normale şi tangenţiale care se calculează cu formulele (6.7), (6.24). Valorile maxime ale acestor tensiuni trebuie să verifice condiţiile (6.9), (6.33). Starea de tensiune a unui element cum este 2 în figura 6.13, b este deci o stare plană, pentru care se pot determina direcţiile şi tensiunile normale principale, folosind relaţiile (4.122) şi (4.123) :
2tan 2 xz
x
τα =
σ ; 2 2
1,31( , ) 4
2 2x
x xzx z σσ = ± σ + τ . (6.49)
La secţiuni pline este suficientă satisfacerea condiţiilor (6.9) şi (6.33), deoarece valorile extreme ale tensiunilor normale apar în fibrele extreme ale secţiunii iar tensiunile tangenţiale sunt maxime în fibra medie, adică acolo unde tensiunile normale sunt nule. La unele tipuri de secţiuni există însă fibre în care apar simultan tensiuni normale şi tangenţiale având valori foarte apropiate de cele extreme. Acesta este, de exemplu, cazul fibrelor extreme ale inimilor grinzilor cu secţiunea în formă de I (figura 6.13, b, elementul 2). Asigurarea rezistenţei grinzii în aceste fibre impune considerarea stării plane de solicitare şi folosirea unor relaţii de calcul mai complexe decât (6.9) şi (6.33); una dintre aceste relaţii este σ1 ≤ σa . La profilele I laminate, dimensiunile şi forma tălpilor precum şi racordarea acestora cu inima sunt astfel alese încât dacă sunt îndeplinite condiţiile (6.9) şi (6.33) să nu mai fie necesare alte verificări. Cunoaşterea direcţiilor principale prezintă deosebită importanţă la grinzile

Solicitarea la încovoiere
21
confecţionate din materiale care se comportă diferit la întindere şi compresiune, cum este betonul. Întrucât rezistenţa la întindere a betonului este mult mai mică decât cea la compresiune, pentru preluarea eforturilor de întindere se introduc armături metalice (bare de oţel numite şi fier beton) care se dispun aproximativ pe direcţiile tensiunilor principale de întindere (figura 6.13, f). Direcţiile principale în fiecare punct sunt tangente la două curbe care fac parte din două familii de curbe numite izostatice.
σx = 0
Cy maxzxτ
τxz σx maxxσ
τxz = 0
1
2 3z
x
τxzmaxxσ
σx
maxzxτ
F
(σ1(σ3
P
a b c
e
d
f
π/
π/
π/
Fig. 6.13
Traiectoriile tensiunilor principale (izostaticele) se construiesc în felul următor. Se determină direcţiile principale 1 şi 2 într-un punct P; pe direcţia 1 se alege un punct PP
', vecin cu P; în punctul P'P se determină de asemenea direcţiile principale
care, evident, vor fi altele decât cele din punctul P; pe direcţia 1' din PP
' se alege un punct P''
P vecin pentru care se determină direcţiile principale 1'', 2'' ş.a.m.d. Curba tangentă la poligonul PP'PP
''… este traiectoria tensiunilor σ . Direcţia tensiunii σ pentru orice punct situat pe această curbă este dată de tangenta la curbă în punctul respectiv. În mod similar se obţin şi alte curbe din familia izostaticelor σ precum şi familia izostaticelor σ . Cele două familii de curbe sunt ortogonale între ele şi intersectează axa barei sub unghiuri de 45° iar fibrele superioare şi inferioare sub unghiuri de 0 sau 90° (figura , e).
1 1
1
2
6.13
6.5 DEFORMAŢII ALE BARELOR DREPTE SOLICITATE LA ÎNCOVOIERE
Cunoaşterea deformaţiilor barelor drepte solicitate la încovoiere este necesară atât pentru rezolvarea problemelor în care se impun condiţii de rigiditate cât şi pentru rezolvarea problemelor static nedeterminate.

REZISTENŢA MATERIALELOR 22
6.5.1 Ecuaţia diferenţială a fibrei medii deformate
Aşa cum s-a arătat la p. 6.1, prin încovoierea unei bare drepte, axa acesteia devine o curbă numită fibră medie deformată. Ea este dată de funcţia wo = wo(x), unde s-a notat cu wo(x) proiecţia pe axa z a deplasării centrului de greutate al secţiunii transversale de la abscisa x. Cunoaşterea funcţiei wo(x) permite determinarea în orice secţiune a unghiului tangentei dusă la fibra medie deformată, notat ϕ(x) şi numit rotirea fibrei medii deformate la abscisa x,
'oo
d ( )tan ( ) ( )d
w xx w xx
ϕ = = ; od ( )( ) arctand
w xxx
ϕ = . (6.50)
Deplasările wo sunt pozitive în sensul axei z iar rotirile ϕ în sens orar, aşa cum rezultă din relaţia (6.50). Acest sens este invers sensului de rotire prin care se obţine sensul pozitiv al axei y. Datorită ipotezei lui Bernoulli, unghiul ϕ(x) este egal în mărime absolută cu unghiul de rotire a secţiunii θ(x), deoarece sunt unghiuri cu laturile reciproc perpendiculare. Ele au însă semne contrare, deoarece rotirea secţiunii respectă convenţia de semne a deplasărilor, care sunt pozitive când se produc în sensul axelor de coordonate, deci deplasarea θ(x) este pozitivă dacă are sensul de rotaţie pozitivă în jurul axei y, pe când rotirea fibrei medii ϕ(x) este definită pozitiv în sensul indicat în figura 6.14, a. Pe scurt,
ϕ(x) = – θ(x) , (6.51) iar deplasările (de translaţie) pe direcţiile x şi z ale unui punct oarecare al secţiunii (figura 6.14, b) se pot calcula astfel:
( , ) sinu x z z= − ϕ ; o( , ) ( ) cosw x z w x z z= + ϕ − . (6.52)
a
w
d
b
x F
z
x
O
– θ(x) = ϕ
ϕu
c ϕ +
d
d
dx dw
O
M
M
w
z ϕ
ϕ (x)

Solicitarea la încovoiere
23
Fig. 6.14
Aşa cum s-a văzut în demonstrarea relaţiei (6.2), inversul razei de curbură, adică 1/ρ este egal cu derivata rotirii secţiunii şi se spune că reprezintă curbura barei,
. Pe de altă parte, relaţia dintre curbură şi momentul încovoietor este 1/ d / dsρ = θ1/ /y yM EIρ = (v. (6.6)). Rezultă
dd
y
y
Ms EIθ= , (6.53, a)
sau, conform relaţiei (6.51),
dd
y
y
Ms EIϕ= − . (6.53, b)
Relaţia (6.53, b) poate fi scrisă şi în funcţie de săgeata wo, dacă se face înlocuirea (6.50). Rezultă
o
o22 2 2
oo o
dd( )d d dd d darctan
d d dd d d1 d 1d d
y
y
w
( )M xw x xx x
x x Ewx w wxx x
⎛ ⎞⎜ ⎟⎛ ⎞ ⎝ ⎠= =⎜ ⎟
⎝ ⎠ + ⎛ ⎞ ⎛ ⎞+ +⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
I x− ,
sau
2o
2
2o
d( )d( )d1
d
y
y
wM xxEI xw
x
= −⎛ ⎞+ ⎜ ⎟⎝ ⎠
. (6.53, c)
Relaţiile (6.53) reprezintă forme ale ecuaţiei diferenţiale exacte a încovoierii barei. În majoritatea cazurilor practice, deplasările sunt mici în raport cu dimensiunile grinzilor, deci se pot face următoarele aproximaţii:
cos ϕ ≈ 1 ; sin ϕ ≈ tg ϕ = ≈ ϕ , (6.54) 'o ( )w x
astfel încât relaţiile (6.52) devin
, 'o( , ) ( )u x z zw x= − o( , ) ( )w x z w x= , (6.55)
iar săgeţile w(x) se determină din ecuaţia diferenţială de ordinul doi,
'' ( )( )
( )y
y
M xw x
EI x= − , (6.56)
numită îndeobşte ecuaţia diferenţială a fibrei medii deformate a grinzii. Deplasarea w (x) se obişnuieşte să se numească săgeata grinzii în secţiunea x. Derivând relaţia (6.56) de două ori în raport cu x şi ţinând seama de (3.4) se obţine , (6.57)
'''( ) ( ) ( )y zEI x w x T x⎡ ⎤ = −⎣ ⎦

REZISTENŢA MATERIALELOR 24
. (6.58) ''''( ) ( ) ( )yEI x w x q x⎡ ⎤ =⎣ ⎦
Relaţiile (6.56) şi (6.58) reprezintă ecuaţiile diferenţiale ale încovoierii barelor drepte, neprismatice, cu deformaţii mici. Pentru bare prismatice,
, (6.59) '' ( ) ( )y yEI w x M x= −
''' ( ) ( )y zEI w x T x= − , (6.60)
. (6.61) ( ) ( ) ( )ivyEI x w x q x=
Ecuaţiile diferenţiale (6.56), (6.58) şi (6.59), (6.61) sunt liniare în raport cu funcţia w(x) şi cu derivatele sale.
6.5.2 Integrarea ecuaţiei diferenţiale a încovoierii barelor drepte
Pentru integrarea ecuaţiei diferenţiale a fibrei medii deformate s-au elaborat metode analitice, grafice sau grafo-analitice. În cele ce urmează se va prezenta metoda parametrilor în origine precum şi unele aplicaţii. Se consideră o grindă dreaptă oarecare, solicitată de forţe exterioare distribuite şi concentrate ca în figura 6.15. Încărcarea distribuită a grinzii se scrie sub forma
(6.62) oo o 1 1( ) ( )q x q x a q x a q x x a= ⟨ − ⟩ + ⟨ − ⟩ + ⟨ − ⟩o
unde qo – intensitatea sarcinii uniform distribuită pe zona x ≥ ao ; q1 – coeficientul unghiular al dreptei q1(x – a1) care reprezintă sarcina liniară distribuită pe zona x ≥ a1 ;
–încărcarea distribuită după o lege oarecare pe zona x ≥ a( )q x . ( )q x
z
x
Fq1qo
T
M
x
M ao a1 a aF aM l
q(x)
1
q1(x – a1)
Fig. 6.15
În expresia din membrul drept al relaţiei (6.62) s-a folosit aşa-numita funcţie singularitate,

Solicitarea la încovoiere
25
0 dacă ,( ) dacă .
x ax a
x a x<⎧
⟨ − ⟩ = ⎨ − ≥⎩ a (6.63)
Această funcţie singularitate permite introducerea unei sarcini care începe de la x = a şi continuă până la x → ∞. Pentru a “opri” o sarcină la o anumită abscisă x = b, se introduce o sarcină fictivă de acelaşi tip dar de sens contrar, care începe la abscisa x = b şi care, evident, trebuie să se scrie cu ajutorul expresiei ⟨x – b⟩. Expresia (6.62) este valabilă în toate secţiunile grinzii cu excepţia secţiunilor în care sunt aplicate forţe sau momente încovoietoare. Încărcările concentrate de tip To, Mo, F, M, vor interveni atunci când se scriu expresiile forţelor tăietoare şi momentelor încovoietoare. Cu ajutorul relaţiilor (6.57), (6.62) şi ţinând seama de (3.4) se obţine
(6.64) ''' o
o0
( ) ( ) ( ) ( )dx
z y FT x EI x w x T q x x F x a⎡ ⎤= − = − − ⟨ − ⟩ =⎣ ⎦ ∫
2
1 o1o o o 1 ( ) d
2
x
Fa
x aT q x a q q x x a x F x a⟨ − ⟩= − ⟨ − ⟩ − − ⟨ − ⟩ − ⟨ − ⟩∫ o , (6.65)
unde To reprezintă forţa tăietoare în origine, To = Tz(0). Din (6.56), (3.4) şi ţinând seama de (6.64) rezultă
2 3
'' o 1o o o 1( ) ( ) ( )
2! 3!y yx a x aM x EI x w x M T x q q⟨ − ⟩ ⟨ − ⟩
= − = + − − − (6.66)
, (6.67) o o( ) d dx x
Fa a
q x x a x x F x a x a⎛ ⎞
− ⟨ − ⟩ − ⟨ − ⟩ − ⟨ −⎜ ⎟⎝ ⎠∫ ∫ M M ⟩
unde Mo reprezintă momentul încovoietor în origine, Mo = My(0). Integrând de două ori succesiv relaţia (6.66) se obţine
o 1
2 3' ' o o 1 1
o o o0 0
d dd d( )
( ) ( ) 2 ( ) 6 ( )
x x x x
y y y ya a
q x a x q x a xx x xw x w M T
EI x EI x EI x EI x⟨ − ⟩ ⟨ − ⟩
= − − + + +∫ ∫ ∫ ∫
o
o d dd( ) d d
( ) ( ) ( )F M
x x x x xF
y ya a a a a
M
y
x a x x a xxq x x a x x F
EI x EI x EI x⟨ − ⟩ ⟨ − ⟩
+ ⟨ − ⟩ + +⎛ ⎞⎜ ⎟⎝ ⎠
∫ ∫ ∫ ∫ ∫M (6.68)
şi
o o
2' o o
o o o o0 0 0 0
dd d( ) d d d
( ) ( ) 2 ( )
x x x x x x
y y ya a
q x a xx x xw x w w x M x T x x
EI x EI x EI x⟨ − ⟩
= + − − +⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠∫ ∫ ∫ ∫ ∫ ∫
1 1
3o1 1 d d
d ( ) d6 ( ) ( )
x x x x x x
y ya a a a a a
q x a x xd dx q x x a x x x
EI x EI x⟨ − ⟩
+ + ⟨ − ⟩⎛ ⎞⎛ ⎞⎜ ⎟⎜ ⎟
⎝ ⎠⎝ ⎠∫ ∫ ∫ ∫ ∫ ∫ +
od d
d d( ) ( )
F F M M
x x x xF
y ya a a a
x a x x a xMF x xEI x EI x
⟨ − ⟩ ⟨ − ⟩+ +
⎛ ⎞ ⎛⎜ ⎟ ⎜⎜ ⎟ ⎜⎝ ⎠ ⎝∫ ∫ ∫ ∫M
⎞⎟⎟⎠
, (6.69)
unde cu şi w'ow o s-au notat rotirea respectiv săgeata în origine, adică = w'
ow '(0) şi wo = w(0).

REZISTENŢA MATERIALELOR 26
Mărimile To, Mo, w'o, wo se numesc parametri în origine şi se determină din
condiţiile la limită. Aceste condiţii pot fi scrise pentru deplasări (săgeţi, rotiri) sau/şi pentru eforturi (Tz , My). Mai jos sunt prezentate câteva cazuri de scriere a condiţiilor la limită pentru grinzi cu o singură deschidere, având legături rigide.
a
Mlx = 0
x = l
b
Ml
Fl
c d
x = 0
x = l
x = l x = lx = 0
x = 0
Fig. 6.16
(a) ; o o(0) 0 , (0) 0 , ( ) 0 , ( )y yw w M M w l M l= = = = = = −Ml
l
o
1
(b) ; ' 'o o o(0) 0 , (0) 0 , ( ) , ( )z l yw w w w T l F M l= = = = = = −M
(c) ; 'o o(0) 0 , (0) 0 , ( ) 0 , ( ) 0yw w M M w l w l= = = = = =
(d) . ' ' 'o o o o(0) 0 , (0) 0 , ( ) 0 , ( ) 0w w w w w l w l= = = = = =
În cazurile (a) şi (b), care reprezintă grinzi static determinate, ultimele două condiţii nu sunt altceva decât ecuaţiile de echilibru din care se determină reacţiunile grinzii. Se observă că studiul deformaţiilor permite rezolvarea grinzilor static nedeterminate, cum sunt cazurile (c) şi (d). Pentru grinzi prismatice, încărcate cu forţe concentrate, momente concentrate, sarcini distribuite uniform şi liniar, relaţiile (6.62)…(6.69) devin
, oo o 1( )q x q x a q x a= ⟨ − ⟩ + ⟨ − ⟩
2
o1o o o 1( )
2!z Fx aT x T q x a q F x a⟨ − ⟩
= − ⟨ − ⟩ − − ⟨ − ⟩ ,
2 3
oo 1o o o 1( )
2! 3!y F Mx a x aM x M T x q q F x a x a⟨ − ⟩ ⟨ − ⟩
= + − − − ⟨ − ⟩ − ⟨ − ⟩M ,
32
' ' oo o o o( )
2! 3!y yx axEI w x EI w M x T q⟨ − ⟩
= − − + +
4 2
11 4! 2!
FM
x a x aq F x⟨ − ⟩ ⟨ − ⟩+ + + ⟨ −M a ⟩ , (6.70)
42 3
' oo o o o o( )
2! 3! 4!y y yx ax xEI w x EI w EI w x M T q⟨ − ⟩
= + − − + +
5 3
11 5! 3! 2!
F Mx a x a x aq F2⟨ − ⟩ ⟨ − ⟩ ⟨ − ⟩
+ + +M . (6.71)
Expresiile (6.69) şi (6.71) reprezintă integralele generale ale ecuaţiilor diferenţiale (6.58) respectiv (6.61) întrucât conţin patru constante de integrare, iar funcţiile w(x) precum şi derivatele lor satisfac ecuaţiile diferenţiale (6.56)…(6.58) respectiv (6.59)…(6.61). Ecuaţia w = w(x) se mai numeşte ecuaţia liniei elastice a grinzii.

Solicitarea la încovoiere
27
Din reprezentarea grafică a funcţiei w = w(x) se determină săgeata maximă wmax = w(xo) , unde xo este rădăcina ecuaţiei w'(xo) = 0. Săgeata şi rotirea maxime pot fi scrise întotdeauna sub forma
3
maxy
QlwEI
= β , 2
'max
y
QlwEI
= α , (6.72)
unde Q: încărcarea totală a grinzii; l : lungimea grinzii; α şi β: coeficienţi adimensionali care depind de modul de rezemare a grinzii şi de tipul încărcării.
În cazurile în care se impun condiţii de rigiditate a grinzii, de tipul
wmax ≤ wa , w'max ≤ w'
a , (6.73) înlocuind (6.72) în (6.73) se obţin relaţii care permit efectuarea calculelor de dimensionare (obţinerea lui Iynec), de verificare sau de determinare a încărcărilor capabile. Evident, în afara acestor condiţii trebuie satisfăcute şi condiţiile de rezistenţă (6.9), (6.33).
6.5.3 Aplicaţii
1. Grinda în consolă încărcată cu sarcină uniformă şi cu o forţă şi un moment pe capătul liber.
M
Fq
w
w'
x = 0 x = l
Fig. 6.17 Întrucât To = – F şi Mo = – M , din relaţia (6.71) se obţine
2 3
'o o( )
2 6 2y y y
4
4x x xEI w x EI w EI w x F q= + + + +M ,
unde w'o , wo se determină din condiţiile la limită:
w(l) = 0 : 2 3 4
'o o 0
2 6 24y yl l lEI w EI w l F q+ + + +M = ,
w'(l) = 0 : 2 3
'o 0
2 6yl lEI w l F q+ + + =M .
Rezolvând sistemul obţinut rezultă:
2 3
'o
12 6y
l lw l FEI
⎛ ⎞= − − −⎜ ⎟
⎝ ⎠M q , (6.74)

REZISTENŢA MATERIALELOR 28
2 3 4
o max1
2 3 8y
l l lw w F qEI
⎛= = + +⎜
⎝ ⎠M
⎞⎟ , (6.75)
astfel încât expresia săgeţii devine 2 2 3 3 4
2 3
1 3 1( ) 1 2 1 1
2 3 2 2 8 3y
l x x l x x l x xw x F q
EI l l ll l= − + + − + + − +
⎡ ⎤⎛ ⎞ ⎛ ⎞ ⎛⎜ ⎟ ⎜ ⎟ ⎜⎢ ⎥⎝ ⎠ ⎝ ⎠ ⎝⎣ ⎦
M4
4
4 13 l
⎞⎟⎠
.
2. Grinda simplu rezemată pe reazeme rigide la capete încărcată cu sarcină uniformă.
qwo=
w'
Mo=
To=
wma
Fig. 6.18
Cu valorile parametrilor în origine din figura 6.18, ecuaţia liniei elastice are expresia
3 4
'o( )
2 6 24y yql x xEI w x EI w x q= − + .
Din condiţia w(l) = 0 rezultă
3
'o 24 y
qlwEI
= , (6.76)
astfel încât ecuaţiile liniei elastice şi a rotirii devin:
4 3
3 4( ) 224 y
ql x x xw xEI l l l
⎛ ⎞= − +⎜ ⎟
⎝ ⎠
4
, (6.77)
3 2
'2 3( ) 1 6 4
24 y
ql x xw xEI l l
⎛ ⎞= − +⎜ ⎟
⎝ ⎠
3
. (6.78)
Săgeata maximă este la abscisa care anulează derivata liniei elastice, adică la x = l / 2, deci
4
max5
384 y
qlwEI
= . (6.79)
Din expresia rotirii rezultă
3
' 'o( )
24 y
qlw l wEI
= − = − . (6.80)
3. Grinda simplu rezemată pe reazeme rigide la capete încărcată cu o forţă concentrată.

Solicitarea la încovoiere
29
w(0,5lwo= w'(lMo=
To=
wma
F
a l = a + xo0,5l
w'w(a
Fig. 6.19
Punând condiţia w(l) = 0 în ecuaţia liniei elastice
3 3
'o( )
6 6y yFb x x aEI w x EI w x Fl
⟨ − ⟩= − + ,
rezultă
'o
1 ( )6y
Fabw lEI l
= + b . (6.81)
Prin înlocuire, se obţine:
3 31( ) ( )
6 6y
Fab Fb x x aw x l b x FEI l l
⎡ ⎤6
⟨ − ⟩= + − +⎢ ⎥
⎣ ⎦ , (6.82)
2 2
' 1( ) ( )6 2y
Fab Fb x x aw x l b FEI l l
⎡ ⎤2
⟨ − ⟩= + − +⎢ ⎥
⎣ ⎦ . (6.83)
Săgeata maximă se obţine pentru valoarea xo care satisface relaţia w'(xo) = 0 . Dacă a > b este evident că xo < a şi rezultă
2 2
o( )
3 3a l b l bx + −
= = . (6.84)
Înlocuind valoarea găsită pentru xo în (6.82) se obţine
2 2
max 9 3y
Fb l bwlEI
−= . (6.85)
Săgeata la mijlocul grinzii este
2 2(0,5 ) (3 4 )48 y
Fbw l l bEI
= − . (6.86)
Diferenţa dintre săgeata maximă şi săgeata la mijlocul grinzii depinde evident de raportul b / l . Pentru b / l = 0,5 se obţine
3
* *max (0,5 )
48 y
Flw w lEI
= = . (6.87)
Pentru alte valori ale raportului b / l , în tabelul de mai jos sunt date valorile w(0,5l) / wmax . Se observă că săgeata la mijlocul grinzii diferă foarte puţin de wmax , chiar şi în cazul în care forţa F este aplicată foarte aproape de unul din reazeme. De altfel din (6.84) se observă că abaterea maximă a valorii xo faţă de 0,5l , obţinută

REZISTENŢA MATERIALELOR 30
pentru cazul în care b → 0, este 0,077l . Tabelul 6.2
b / l
0,1 0,2 0,3 0,4 0,5
max
(0,5 )w lw
0,975 0,981 0,988 0,995 1,000
Din relaţia (6.83) rezultă
' ( ) ( )6 y
Fabw l l alEI
= − + , (6.88)
iar săgeata sub sarcină rezultă din (6.82),
2 2
( )3 y
Fa bw alEI
= − . (6.89)
Pentru cazul particular în care a = b = 0,5l , săgeata maximă este dată de expresia (6.87) iar rotirile au expresia
2
' 'o ( )
16 y
Flw w lEI
= − = . (6.90)
4. Grindă static determinată cu secţiune variabilă în trepte.
F
wo=
Mo=
α lTo = F(1 –
βIo Iy = Io
M
βFlα(1 –
α
Flα(1 –
Fig. 6.20
Se utilizează relaţia (6.69), în care wo = 0 şi Mo = 0,
'o
0 0
d d( ) (1 ) d d( ) ( )
x x x x
y yl l
x x x l xw x w x F x F xEI x EI xα α
⎛ ⎞ ⎛ ⟨ −α ⟩= − −α +⎜ ⎟ ⎜⎜ ⎟ ⎜
⎝ ⎠ ⎝∫ ∫ ∫ ∫
⎞⎟⎟⎠
. (6.91)
Din condiţia w(l) = 0 rezultă

Solicitarea la încovoiere
31
( )'o
o o o0 0
dd d(1 ) d d d 0l x l x l x
l l l l
x l xx x x xw l F x x F xEI EI EI
α
α α α α
⎡ ⎤⎛ ⎞ ⎛ ⎞ ⎛ ⎞− α− − α + + =⎢ ⎥⎜ ⎟ ⎜ ⎟ ⎜ ⎟
β⎢ ⎥⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎣ ⎦∫ ∫ ∫ ∫ ∫ ∫ ,
din care se obţine
2
' 2o
o
8 (3 2 )(1 ) 2(1 )16 3
FlwEI
⎡ ⎤α − α= α −α + −α⎢ ⎥β⎣ ⎦
. (6.92)
Înlocuind în expresia săgeţii şi făcând apoi x = αl rezultă
3
2 2
o
2( ) 8 (1 ) 2(1 )48
Flw lEI
⎡ ⎤αα = α −α + −α⎢ ⎥β⎣ ⎦
. (6.93)
Pentru β = 1 se obţin rezultatele din aplicaţia 3. O altă metodă de rezolvare constă în înlocuirea grinzii date cu o grindă echivalentă având moment de inerţie constant ([28], [30]).
Teste T1. Tensiunile normale din secţiunea transversală a unei bare solicitată la încovoiere se calculează cu formula: 1. Bernoulli, 2. Hooke, 3. Saint Venant, 4. Navier, 5. Juravski. T2. Tensiunile normale în secţiunea transversală a unei bare solicitată la încovoiere variază : 1. proporţional cu forţa tăietoare din secţiune, 2. proporţional cu momentul de inerţie axial al secţiunii, 3. proporţionale cu momentul încovoietor din secţiune, 4. invers proporţional cu modulul de rezistenţă al secţiunii transversale, 5. proporţionale cu sarcina uniform distribuită. T3. Pentru o bară solicitată la încovoiere în planul xoz, într-o secţiune dată, tensiunile normale maxime apar în : 1. în punctele cele mai îndepărtate de axa centrală principală y, 2. punctele de pe conturul secţiunii, 3. în centrul de greutate al secţiunii. 4. punctele din axa neutră, 5. în punctele cele mai depărtate de axa centrală principală z. T4. Axa neutră la încovoiere este 1. axa în care tensiunile normale au valori maxime, 2. locul geometric al punctelor în care tensiunile normale sunt nule, 3. axa după care este orientat momentul încovoietor, 4. axa faţă de care se calculează momentul de inerţie axial al secţiunii, 5. axa după care este dirijată forţa axială din secţiune T5. Unitatea de măsură pentru modulul de rezistenţă este : 1. Pa, 2. Nm, 3. m3, 4. m4, 5. kN. T6. Tensiunile tangenţiale din secţiunea transversală a unei bare solicitată la încovoiere simplă se calculează cu formula: 1. Bernoulli, 2. Hooke, 3. Saint Venant, 4. Navier, 5. Juravski. T7. Tensiunile tangenţiale în secţiunea transversală a unei bare solicitată la încovoiere simplă sunt : 1. maxime în axa neutră, 2. maxime în apropierea axei neutre, 3. maxime în punctele cele mai îndepărtate de axa neutră, 4. nule în punctele cele mai îndepărtate de axa neutră, 5. nule în axa neutră.

REZISTENŢA MATERIALELOR 32
Pentru bara solicitată ca în figura 6.20 a), având forma secţiunii conform cu 6.20 b), confecţionată dintr-un material pentru care se cunoaşte σa= 228 MPa, precizaţi :
Fig.6.20
1
V1
3
2 m 4 m
4kN/m
V3
2
4kN/m x
6t y
yo6t
z
d12t C
zo
2t
a b
T8. valoarea reacţiunilor V1 , V3 este : 1) 4 şi -4 ; 2) 8 şi -8 ; 3) 16 şi - 16 ; 4) -8 şi 8 ; 5) - 4 şi 4 ; T9. expresia forţei tăietoare pe zona 1-2 este : 1) ( ) 4T x = ; 2) ; ( ) 4 4T x x= −
3) ; 4) ; 5) ( ) 8 4T x x= − ( ) 8 4T x x= + ( ) 8 4T x x= − + ;
T10. expresia momentului încovoietor pe zona 2-3 este : 1) ( ) (8 4 2M x x x= − − ) ;
2) ( ) ( )8 4 2M x x x= + − ; 3) ( ) 8 4M x x= − ; 4) ; 5) ( ) ( )28 4 2 2M x x x= − + −
( ) ( )228 4
2x
M x x−
= − ;
T11. secţiunea periculoasă este : 1) secţiunea 1şi 3; 2) secţiunea 2; 3) secţiunea 3; 4) secţiunea aflată la x =1; 5) secţiunea aflată la x =1 şi x =3 ; T12. Momentul încovoietor maxim ( în valoare absolută ) este : 1) 1,5 kNm; 2) 2 kNm; 3) 4 kNm; 4) 2,5 kNm; 5) 3,5 kNm; T13. poziţia centrului de greutate al secţiunii transversale este : 1) d1 =3t; 2) d1 =t; 3) d1 =5t; 4) d1 =2t; 5) d1 =2.5t; T14. valoarea momentului de inerţie axial în raport cu axa centrală principală y este: 1) ; 2) ; 3) ;4) ;5) ; 4140t 4122t 4138t 4135t 4136tT15. valoarea modulului de rezistenţă 1) 30 ; 2) ; 3) 34 ; 4) ; 5)
;
3,5t t327,5t 3 336t332,5t
T16. valoarea parametrului t este: 1) 0,8 cm, 2) 2 cm, 3) 0,9 cm, 4) 3,5 cm, 5) 1 cm, T17. valoarea tensiunii normale maxime din secţiunea periculoasă este: 1) 99,8 MPa; 2) 98,7 MPa; 3) 100,8 MPa; 4) 101,7 MPa; 5) 89,8 MPa; T18. valoarea forţei tăietoare din secţiunea x = 0 este: 1) 0 kN; 2) 4 kN; 3) 8 kN; 4) 16 kN; 1) 2 kN;
T19. valoarea tensiunii tangenţiale maxime din secţiunea x = 0 este: 1) 10 MPa;

Solicitarea la încovoiere
33
2) 5 MPa; 3) 6 MPa; 4) 6,5 MPa; 5) 4,5 MPa; T20. expresia ecuaţiei diferenţiale a fibrei medii deformate este:
1) ( ) ( )22
12 232 4 4 2yEI w x x x x= − + − − ; 2) ( ) ( )22
12 234 8 4 2yEI w x x x x= − + − − ;
3) ( ) ( )22
12 234 4 4 2yEI w x x x x= − + − − ; 4) ( ) ( )22
12 234 4 8 2yEI w x x x x= − + − − ;
5) ( ) ( )22
12 234 4 2yEI w x x x= − − ;
T21. Pentru integrarea ecuaţiei diferenţiale se pun următoarele condiţii la limită: 1) ; 2) ( ) ( )' '0 0; 1w w= = 0 ( ) ( )' 0 0; 1w w 0= = ; 3) ( ) ( )0 0; 2w w 0= = ;
4) ; 5) ( ) ( )0 0; 4w w= = 0 ( ) ( )' '0 0; 4w w 0= = ;
T22. săgeata la x=1 m este: 1) 0,0012 m; 2) 0,24 m; 3) 0,0047 m; 4) 0,075 m; 5) 0,0008 m; T23. rotirea secţiunii aflată la x = 0 este: 1) 0,0075 ; 2) 0,0012 ; 3) 0,0084 ; 4) 0,0055 ; 5) 0,012 ;

7. TORSIUNEA LIBERĂ A BARELOR DREPTE
7.1 GENERALITĂŢI. DIAGRAMELE MOMENTELOR DE TORSIUNE. APLICAŢII
Torsiunea sau răsucirea liberă este solicitarea barelor în secţiunile cărora acţionează numai tensiuni tangenţiale al căror torsor se reduce la momentul de torsiune Mt având direcţia axei barei (v. relaţia de echivalenţă (3.1)6),
( )t zx yxAdM y z= τ − τ∫ A . (7.1)
Torsiunea este solicitarea predominantă a arborilor, arcurilor elicoidale şi altor organe de maşini sau elemente de construcţii. Pentru a obţine legea de variaţie a tensiunilor τzx şi τzx este necesar să se obţină mai întâi momentele de torsiune Mt în secţiunile barei. Momentele de torsiune apar datorită momentelor exterioare dispuse pe axa barei, cum sunt, de exemplu, momentele M, M1 şi M2 din figura 7.1, a. Astfel de momente rezultă prin reducerea faţă de puncte de pe axa barei a forţelor exterioare care nu o intersectează şi nici nu sunt paralele cu aceasta. Forţele exterioare care nu satisfac aceste condiţii, au momentul nul faţă de axa barei.
Mt1
M1
Ma
M M2M1
M – M1 – M2 =
23 1
M1
Mt13 = M1 = M –
M2
Mt32 = M1 – M = – M2j
M2
Mt3
Mt3
M
Mt1 2 1
2 1
3
3 2 1
2 1
Mt
Mt
sau
M2
M2
M1
M1
d
c
23 1M1 M M2b
Fig. 7.1 Momentul de torsiune într-o secţiune a unei bare este egal cu suma momentelor exterioare dispuse pe axa barei în stânga sau în dreapta secţiunii, având semnul plus atunci când ies din secţiune. Momentele exterioare pot fi reprezentate şi cu ajutorul arcelor orientate, ca în fig. 7.1, b. De regulă, momentele de torsiune se vor

Torsiunea liberă a barelor drepte
35
reprezenta prin vectori (cu două săgeţi); în felul acesta, expresiile momentelor de torsiune şi diagramele lor rezultă similare cu cele de la solicitarea axială, aşa cum se vede în fig. 7.1, c, d1. În fig. (7.1, d) 2 este prezentat un alt mod de haşurare a diagramei momentelor de torsiune, întâlnit uneori în literatură (de ex. în [13], [14]). Momente exterioare dispuse pe axa barei apar la sisteme plane de bare încărcate normal pe planul lor (fig. 7.2, a) şi la sisteme spaţiale de bare (fig. 7.3). În figura 7.2, b este prezentat un exemplu în care apar momente exterioare distribuite dispuse pe axă. Se observă că în acest caz momentul de torsiune are variaţie liniară pe zonele 1-2 şi 3-4.
2 1
3
a
b
c
F a
c
Fb
c4
2
34
3
4
a
F
F
F
Fa Fa
Fb
Fa
q
h
q
q mx= qh m
a b a ba b a
1 2 3 4 1 2 3 4
q
mxMt
b
Fig. 7.2
a
2 1 32a1F1 2a2F2
a2
a2
x2 1 3
y z
a1
a1
F1
F1 F2
F2
a2
a2
21 3
y z
a1
a1
F1
F1 F2
F2
M1
4
4 321 2a1F1 2a2F2 M1 M2
M1 = 2a2F2 – 2a2F2 M1 + M1 = 2a2F2 – 2a2F2
b
x
Fig. 7.3
În figura 7.4 este reprezentat un arbore care primeşte un moment la o turaţie n

REZISTENŢA MATERIALELOR 36
[rot/min] direct de la un motor, moment pe care arborele îl transmite prin torsiune la o roată pe care este montată o curea, ce antrenează un consumator. Puterea PP
[W] transmisă de la motor prin arbore este preluată de roata care antrenează cureaua, în ramurile căreia apar eforturile S
', S ' ', între care există relaţia lui Euler S
'= S ' 'eμα,
unde μ este coeficientul de frecare între roată şi curea iar α este unghiul de înfăşurare. Reducând forţele S
', S ' ' faţă de punctul B de pe axa arborelui se obţin
forţele F şi F aplicate în B şi momentul M = (SV H 1 '– S
' ') R dirijat pe axa arborelui. Pe
de altă parte, din relaţia P = M ω, unde ω = 2πn/60 este viteza unghiulară în rad/sec, se obţine
[ ][ ] 9,55[ / min
P WNmn rot
M =] . (7.2)
Relaţia (7.2) stabileşte legătura între putere şi momentul M aplicat arborelui la
Fig. 7.4
Dacă se ţine seama de pierderile re în lagăre, momentul consumat la
S (e – 1) R =
turaţia n. Momentul M nu este moment de răsucire, deşi uneori este chiar numeric egal cu acesta. El este un moment exterior aplicat arborelui în timp ce momentul de torsiune Mt este un efort care apare în secţiuni făcute în arbore.
de puteroata de curea este ceva mai mic decât momentul motor M. Neglijând aceste pierderi, dacă mişcarea se face cu viteză unghiulară constantă, suma momentelor exterioare faţă de axa de rotaţie x este nulă. Din relaţia
' ' μα [ ]P W9,55[ / ]n rot min
, (7.3)
se determină S ' ' şi apoi S
'= S ' 'eμα, iar pe baza acestora se obţin componentele pe
rior M care are sensul iş
axe FH şi FV care se aplică arborelui în B (v. figura 7.4, b şi c). Un caz similar este prezentat în fig. 7.5, a. Momentul extem cării de rotaţie este motor iar M1 este rezistent. Roţile corespunzătoare se numesc motoare respectiv rezistentă. Arborele va avea viteză unghiulară constantă, dacă M = M1, adică
S 'f
F S
'
FH
S '
S 'f
FV
M1 = (S ' – S
' ' )
xy z
(n ,
α
O
a)
c)
b)
ar-
B
FH
M
cureaFV
M1
MM

Torsiunea liberă a barelor drepte
37
' '' ' ''1 1( ) ( )F F R F F R− = − 1 . (7.4)
l în care transmiterea puterii se face prin roţi din e lanţ sau de cţ
În cazu ţate, dfri iune, momentele aplicate de roţi arborelui se obţin cu relaţia M = FR, unde F este forţa tangenţială care acţionează la periferia roţii de rază R. Pentru cazul din figura 7.5, b, arborele are viteza unghiulară constantă, dacă 1 1F R F R= . Dacă pe un arbore sunt montate mai multe roţi de transmisie, ca în fig intre care una este motoare iar celelalte consumatoare, din bilanţul puterilor, iP P=∑ , rezultă
i=∑M M . În ce priveşte modul de dispunere pe arbore, este indicat ca roata ă fie intercalată între roţile rezistente, ca în figura
ura 7.6, d
motoare s 7.6, b, pentru că astfel momentul de torsiune maxim este mai mic decât M. În situaţia din figura 7.6, a, momentul de torsiune maxim este egal cu momentul motor M.
Fig. 7.5
Fig. 7.6
Din exemplele prezentate se ob , în general, în afara momentelor servă căexterioare dispuse pe axă, apar şi forţe normale pe axă. Deşi acestea din urmă produc încovoierea barei, se poate studia separat torsiunea, independent de încovoiere.
M
a)
M M M M
M
M
M 4 + M 3 + M 2
M 4 + M
MM M M M
M
M 4 + M
M 1 + M
M
b)
(P) (P1) (P2) (P3) (P4) (P)(P1) (P2) (P3) (P4)
M = F R
FR R1
F1
F1
b)
'F
' 'F '1F
' '1F
R1R
' ''1 1F F+
' ''( )F F R= −M' ''F F+
' ''1 1 1 1( )F F R= −M
F
M1 = F1 R1
a)

REZISTENŢA MATERIALELOR 38
7.2 RĂSUCIREA BAREI DE SECŢIUNE INELARĂ SUBŢIRE. COMPORTAREA MATERIALELOR LA TORSIUNE
Se consideră o bară prismatică de secţiune inelară (v. fig. 7.7, a), având raza medie R şi grosimea t << R. Pe suprafaţa laterală a acestei bare se trasează o serie de linii directoare (circumferenţiale) şi generatoare (paralele cu axa). După aplicarea momentelor M la extremităţi se constată că liniile directoare rămân circumferinţe de aceeaşi rază dar rotite în jurul axei barei, iar generatoarele se înclină faţă de poziţiile iniţiale, menţinându-şi lungimea. Rezultă că şi pentru astfel de bare este valabilă ipoteza lui Bernoulli folosită la solicitările axială şi de încovoiere. Cele două seturi de linii determină pe suprafaţa barei o serie de elemente dreptunghiulare curbilinii. Un dreptunghi abcd capătă după deformaţie forma unui paralelogram a'b'c'd
' având aceleaşi lungimi ale laturilor ca şi elementul în stare nedeformată. Rezultă că starea de deformaţie a unui astfel de element izolat din bară este caracterizată numai de modificarea unghiurilor de 90o, adică de lunecările specifice γsx. În consecinţă, pe feţele acestor elemente există numai tensiuni tangenţiale, orientate ca în figura 7.7, b. Ele respectă principiul dualităţii, adică τxs = τsx. Pentru simplificarea scrierii, tensiunile tangenţiale la răsucire şi lunecările specifice corespunzătoare se vor nota în continuare cu τ respectiv γ. În domeniul elastic, relaţia între τ şi γ este dată de legea lui Hooke (v. (4.102)), τ = G γ , (7.5) unde G este modulul lui Kirchhoff. O astfel de stare de tensiune se numeşte de forfecare pură. Conform celor stabilite la p. 4.5.1.1 (v. fig. 4.10), pentru un element în stare de forfecare pură, tensiunile principale au valorile
σ1 = – σ2 = τ (7.6)
şi direcţiile la 45o faţă de cele ale tensiunilor τ (v. şi fig. 7.7, c). Rezultă că, dacă se trasează pe suprafaţa barei două perechi de linii elicoidale formând unghiuri de 45o respectiv 135o cu generatoarele, pe feţele elementului determinat de aceste linii acţionează tensiunile normale principale σ1 şi σ2. Pe direcţiile acestor tensiuni se produc deformaţii specifice liniare ε1 şi ε2, de întindere respectiv de compresiune. Întrucât modificarea lungimilor este mult mai uşor de măsurat decât modificarea unghiurilor, în studiile experimentale de răsucire a arborilor se obţin mai întâi deformaţiile specifice ε1 şi ε2, folosind, de exemplu, două traductoare electro-rezistive (fig. 7.7, c). Se determină apoi mărimile care interesează, folosind relaţii din Teoria elasticităţii. Astfel, pentru elementul solicitat de tensiunile principale σ1 şi σ2,
deformaţiile specifice principale ε1, ε2 sunt date de legea lui Hooke generalizată pentru starea plană (v. (4.144), a),
1 2 2 11 2(1 ) , (1 )
E E E E E Eσ σ τ σ σ τ
ε = − υ = + υ ε = − υ = − + υ = −ε1 . (7.7)
Între deformaţiilor specifice principale ε1, ε2 şi lunecările specifice γ (ce apar la 45o faţă de ε1, ε2) existând relaţia γ = ε1 – ε2 (v. 4.83), rezultă
12 (1 ) 2Eτ
γ = + υ = ε . (7.8)

Torsiunea liberă a barelor drepte
39
Comparând (7.5) cu (7.8), rezultă relaţia cunoscută (v. 4.104) dintre constantele elastice E, υ şi G,
2(1 )
EG =+ υ
. (7.9)
Comportarea la torsiune a diferitelor materiale se studiază experimental, în laborator, la fel ca şi comportarea la solicitări axiale. În funcţie de scopul urmărit, se pot folosi diverse tipuri de epruvete. Dacă epruveta este tubulară ca în figura 7.7, d, se poate considera că se realizează o stare omogenă de tensiune de forfecare pură, deoarece variaţiile neînsemnate ale tensiunilor pe grosimea pereţilor epruvetei pot fi neglijate. Încercările se efectuează la maşini speciale, prevăzute cu sisteme de măsurare a momentului de răsucire Mt = M şi a deformaţiei unghiulare a epruvetei, adică a unghiului ϕ de rotire relativă a două secţiuni situate la distanţa l. Diagrama ϕ = ϕ (Mt) se numeşte caracteristica la răsucire a epruvetei. Pentru a determinarea caracteristica la răsucire a materialului, se determină τ şi γ în funcţie de Mt respectiv ϕ.
Din ecuaţia de echivalenţă 2
dt RM R t s
π= τ∫ (v. fig. 7.7, a, b şi (3.1)), se obţine
expresia tensiunii tangenţiale
22t t
t
M MR t W
τ = =π
, (7.10)
iar din egalitatea nn' = γ l = ϕR (v. fig. 7.7, a), rezultă lunecarea specifică
R Rl
γ = ϕ = θ , (7.11)
unde θ reprezintă unghiul de răsucire specifică, adică unghiul cu care se rotesc una faţă de alta două secţiuni transversale distanţate cu o unitate de lungime. Din relaţiile (7.10) şi (7.11), ţinând seama şi de legea lui Hooke, se mai obţine relaţia
32t t
t
M MR tG GI
θ = =π
. (7.12)
În domeniul elastic, deformaţia specifică unghiulară γ se determină din relaţia (7.8), măsurând deformaţia ε1 cu ajutorul unor traductoare electro-rezistive de exemplu. Rezultă că şi la răsucire (ca şi la tracţiune) se poate trasa o diagramă caracteristică pentru epruvetă (în coordonatele ϕ -Mt) şi o diagramă caracteristică pentru material (în coordonatele γ-τ). Diagrama caracteristică la răsucire a oţelului este asemănătoare cu cea obţinută la tracţiune. Şi la răsucire se constată existenţa unei zone de proporţionalitate între tensiunile tangenţiale τ şi lunecările specifice γ, zonă pe care este valabilă legea lui Hooke (7.5). De asemenea, la oţeluri obişnuite apare un palier de curgere urmat de o zonă de întărire. Ca şi la tracţiune, pe diagrama caracteristică la răsucire se pot defini: limita de proporţionalitate τp, limita de elasticitate τe, limita de curgere τc (pentru materiale fără palier de curgere, limita tehnică de curgere τ0,3), rezistenţa la rupere τr. La răsucire fenomenul de stricţiune nu are sens. La epruvete tubulare confecţionate din materiale

REZISTENŢA MATERIALELOR 40
tenace apare totuşi o zonă descendentă în diagramă, cauzată de un fenomen complex de pierdere a stabilităţii formei cilindrice a epruvetelor în domeniul plastic, însă ele nu pot fi încercate până la rupere. Pentru astfel de materiale se utilizează epruvete cilindrice (masive). Dacă ruperea se produce într-un plan normal pe axa epruvetei, ea este cauzată de tensiunile tangenţiale transversale care acţionează în acest plan. Epruvetele şi barele confecţionate din materiale fragile (cum este de exemplu fonta) se rup la răsucire după suprafeţe care formează cu axa barei unghiuri de aproximativ 45o, deci ruperea are loc datorită atingerii limitei de rupere pentru tensiunile normale principale σ1 (care sunt de întindere). În sfârşit, este posibilă şi ruperea datorită tensiunilor tangenţiale care apar în secţiunile longitudinale ca efect al dualităţii tensiunilor tangenţiale, aşa cum se vede în figura 7.7, e. Acest aspect trebuie avut în vedere la calculul îmbinărilor longitudinale ale barelor tubulare solicitate la răsucire, ca cea din figura 7.7, f, în care s-a reprezentat cu linii întrerupte modul de deformare după cedarea unei îmbinări realizată incorect.
M γsx ϕ
l
R
M m b a
c
n
d
dx
n'
x
s
Mt Mt
t
dx
a)
d)
a
cb'l
d
l
d
a'l
c'
b
dx
τx
t
t
ds
τ σ1 =
σ
σ
π/4 3π/4
ττ
τ σ2 = –
M M
ab
c d
ac
b) d)
c)
direcţia 1 direcţia 2
Traductoare
l
R, t << R
Tensiuni tangenţialetransversale
Tensiuni tangenţiale longitudinale
e) f)
t << R
γsx
Fig. 7.7

Torsiunea liberă a barelor drepte
41
7.3 RĂSUCIREA BAREI DE SECŢIUNE CIRCULARĂ PLINĂ ŞI INELARĂ
Un experiment similar celui prezentat la bara de secţiune inelară subţire conduce la concluzia că şi la răsucirea barei prismatice de secţiune circulară plină sau inelară cu grosime mare a peretelui rămâne valabilă ipoteza de deformare a lui Bernoulli, conform căreia secţiunile se rotesc faţă de axă ca un rigid, fără să se deplaseze în lungul axei, adică
εy = εz = γyz = 0 , u = 0 → εx = 0 . (7.13) Fie o bară prismatică de secţiune circulară cu raza R. Se separă din bară un element infinitezimal de lungime dx iar în interiorul acestuia se consideră un alt element cilindric de aceeaşi lungime dar de rază r (v. fig. 7.8, a).
b'j
τ
α
δ = y
M dϕ
Rj γj
γmaxj
Mtj
nj
rj Mtj
dxj xj
mj
n'j
τxnj
τnx
j
njsj
xj Cj
aj bj
rj
ττ
τma
dA Cj
Mt
α
d)j
τz
rj
τyx
y
zj
C
b)j a)j
ϕ α
z
y
α
– v
w δ
C
z
c)j
y
z Mt
Rj
Fig. 7.8
În funcţie de momentele exterioare aplicate barei, momentele de torsiune pot fi constante sau variabile pe lungimea barei. După aplicarea acestor momente, secţiunea x se roteşte cu ϕ iar secţiunea x + dx se roteşte faţă de secţiunea x cu unghiul dϕ, egal cu unghiul de rotire al razei Cn din secţiunea x + dx faţă de cel al razei corespondente din secţiunea x. Din relaţia nn' = γmax dx = R dϕ se obţine lunecarea specifică la raza R iar din relaţia bb' = γ dx = r dϕ rezultă lunecarea specifică la o rază r oarecare,
, (7.14) max,r Rγ = θ γ = θunde
d ( d dd
)xxϕ
θ = ⇔ ϕ = θ (7.15)

REZISTENŢA MATERIALELOR 42
reprezintă unghiul de răsucire specifică, adică unghiul cu care se rotesc una faţă de alta două secţiuni transversale distanţate cu o unitate de lungime. Dacă se cunoaşte θ, unghiul ϕ se obţine din (7.15) prin integrare. Considerând că în secţiunea x = 0 unghiul ϕ este nul, se poate scrie
dxϕ = θ∫ , (7.16)
iar dacă θ = const., xϕ = θ . (7.17)
Ipoteza Bernoulli se poate formula şi cu ajutorul deplasărilor u şi v (v. fig. 7.8) Observând că o rază r din secţiunea x se roteşte cu unghiul ϕ rămânând dreaptă şi de aceeaşi lungime, pe baza figurii 7.8, c se pot scrie relaţiile
v = – δ sin α = – r ϕ sin α , w = δ cos α = r ϕ cos α , (7.18)
care, ţinând seama că r = z / sin α = y / cos α, devin
v = – z ϕ , w = y ϕ . (7.19)
În cazul θ = const., se poate înlocui ϕ cu θx (v. (7.17)). Adăugând şi condiţia u = 0, se obţin următoarele componente ale deplasării unui punct la răsucirea barei de secţiune circulară,
u = 0 , v = – z θ x , w = y θ x . (7.20) Dacă se introduc aceste expresii în relaţiile lui Cauchy (4.67), rezultă
0 , 0 , 0 , 0x y z yzu v w vx y z z∂ ∂ ∂ ∂
ε = = ε = = ε = = γ = + =∂ ∂ ∂ ∂
wy
∂∂
,
,zx xyw u u vy zx z y x
∂ ∂ ∂ ∂γ = + = θ γ = + = − θ
∂ ∂ ∂ ∂ . (7.21)
Primele patru relaţii reprezintă restricţiile (7.13) impuse de ipoteza lui Bernoulli. Folosind legea lui Hooke (4.105), din aceste relaţii mai rezultă σx = σy = σz = τyz = 0. Din ultimele două relaţii (7.21), pe baza legii lui Hooke, se obţin componentele pe axele y şi z ale tensiunii tangenţiale,
τyx = – Gθz , τzx = Gθy . (7.22) În figura 7.8, d sunt arătate aceste componente. Se observă că tensiunea tangenţială totală τ este orientată pe tangenta la circumferinţa de rază r şi are valoarea 2 2 2 2 2 2 2
zx yx G y G zτ = τ + τ = θ + θ 2
θ
, adică
. (7.23) G rτ = θ
Relaţia (7.23) se putea obţine direct din (7.14) pe baza legii lui Hooke (7.5). Distribuţia pe rază a tensiunilor tangenţiale totale τ este reprezentată în figura 7.8, b. Se observă că tensiunile τ variază liniar cu raza r, fiind nule în centrul secţiunii şi maxime lângă contur, . max G Rτ = Tensiunile τmax sunt orientate pe direcţia s a tangentei la contur, adică normal pe raza Cn, satisfăcând astfel condiţia la limită în încărcări pe contur. Într-adevăr, dacă τmax ar avea o altă orientare, prin descompunerea pe direcţiile s şi n, tensiunile τmax

Torsiunea liberă a barelor drepte
43
ar avea o componentă τnx şi conform dualităţii tensiunilor tangenţiale ar trebui ca pe suprafaţa laterală a barei să existe încărcări px, care însă lipsesc. Cunoscând legea de distribuţie a tensiunilor se poate obţine valoarea lor în funcţie de momentul de torsiune folosind relaţia de echivalenţă între momentul de torsiune şi tensiunile tangenţiale care acţionează în secţiune. Pe baza figurii 7.8, b se poate scrie
dt AM r A= τ∫ . (7.24)
Înlocuind τ cu (7.23), rezultă .2 d tAG r A Mθ =∫ Aceeaşi relaţie se obţine din (7.1),
introducând componentele (7.22),
2 2 2( )d ( )dt zx yxA Ad
AM y z A G y G z A G r= τ − τ = θ + θ = θ∫ ∫ A∫ .
Cu notaţia 2 d pA
r A I=∫ , (7.25)
unde Ip este momentul de inerţie polar al secţiunii (v. şi (2.9)) rezultă relaţia
tp t
p
MGI MGI
θ = ⇔ θ = , (7.26)
apoi, folosind încă o dată (7.23), se obţine expresia tensiunii tangenţiale,
t
p
M rI
τ = . (7.27)
Din relaţia (7.26) rezultă că θ este constant, atunci când Mt este constant. Dacă Mt este variabil cu x, relaţiile (7.26) şi (7.27) se scriu sub forma
( ) ( )( ) , ( , )t
p p
tM xx x rGI I
θ = τ =M x r . (7.28)
Pentru o bară de lungime l solicitată de momentele de torsiune Mt(x), ţinând seama de (7.28)1 şi de (7.16), rezultă următoarea relaţie de calcul a unghiului de răsucire relativă între extremităţile barei,
1( ) ( )tpl l
x dx M x dxGI
ϕ = θ =∫ ∫ . (7.29)
Dacă momentul de torsiune este constant pe lungimea l, unghiul de răsucire relativă între extremităţile barei este
t t
p t
M l MlGI k
ϕ = θ = = , (7.30)
unde s-a notat cu kt rigiditatea la torsiune a barei. Ea reprezintă momentul de torsiune care produce barei de lungime l un unghi de răsucire relativă între extremităţi egal cu unitatea,
1
pt t
GIk M
lϕ== = . (7.31)

REZISTENŢA MATERIALELOR 44
Produsul GIp, numit rigiditate specifică la torsiune, reprezintă momentul de torsiune care produce unităţii de lungime un unghi de răsucire specifică egal cu unitatea (v. (7.26)),
1p tGI M
θ== . (7.32)
Pentru o bară formată din mai multe tronsoane de rigidităţi kti pe care momentele de torsiune Mti sunt constante, unghiul total de răsucire se obţine cu relaţia
ti ti i
i iti pi
M M lk G
ϕ = =∑ ∑ I . (7.33)
Valoarea maximă a tensiunilor tangenţiale, obţinută pentru r = R, este
maxt
p
MW
τ = , (7.34)
unde
max
pp
pI IW
r R= = , (7.35)
se numeşte modul de rezistenţă polar. Relaţiile obţinute sunt valabile şi pentru bare de secţiune tubulară cu grosime mică sau mare a peretelui. Momentul de inerţie axial pentru secţiunea circulară a fost dedus la p. 2.4 (v. (2.19), a). Ţinând seama de (7.35) şi de relaţia Ip = 2Iy (v. (2.19), b), se obţin expresiile: – pentru secţiunea circulară de diametru D,
4 3
,32 16p pD DI Wπ π
= = ; (7.36)
– pentru secţiunea inelară de diametre D şi d = αD , (α < 1),
4 4 4
4(1 )32 32 32pD d DI π π π
= − = −α ; (7.37)
44
34
(1 )32 (1 )
/ 2 16p
DDW
D
π−α π
= = −α . (7.38)
– pentru secţiunea inelară subţire, cu raza medie R şi grosimea t, ţinând seama că D – d = 2t, D + d ≅ 4R, D2 + d2 ≅ 8R2, pentru momentul de inerţie polar şi modulul de rezistenţă polar se obţin expresiile care rezultă din relaţiile (7.12), (7.10),
4 4 2 2 3( ) ( )( )( ) 232 32pI D d D d D d D d R tπ π
= − = + − + ≅ π , (7.39)
22pp
IW R
R= ≅ π t . (7.40)
Observaţii

Torsiunea liberă a barelor drepte
45
– Riguros vorbind, relaţiile (7.26), (7.27) sau (7.28) sunt valabile numai dacă momentele exterioare sunt aplicate la extremităţile barei cu distribuţia din figura 7.8, b pentru tensiuni tangenţiale. Însă pe baza principiul lui Saint-Venant diverse modalităţi de aplicare a momentelor exterioare influenţează numai local starea de tensiuni şi deformaţii. – Deşi s-a presupus bara prismatică, relaţiile obţinute se pot utiliza şi pentru arbori cu variaţii line ale momentelor de inerţie.
Relaţii pentru calculul la răsucire
Barele de secţiune circulară solicitate la răsucire trebuie să satisfacă cerinţele de rezistenţă şi de rigiditate. Asigurarea condiţiei de rezistenţă constă în satisfacerea relaţiei
maxt
ap
MW
τ = ≤ τ , (7.41)
unde τa este rezistenţa admisibilă la torsiune, care se determină cu relaţia
ca
cc τ
ττ = , pentru materiale tenace , (7.42)
ra
rc τ
ττ = , pentru materiale fragile , (7.43)
ccτ şi crτ fiind coeficienţi de siguranţă faţă de limita de curgere la răsucire respectiv faţă de rezistenţa de rupere la răsucire. Asigurarea condiţiei de rigiditate constă în satisfacerea relaţiei
saut ta
p p
M MGI GI a
lθ = ≤ θ ϕ = ≤ ϕ , (7.44)
unde θa, ϕa reprezintă valori admise pentru răsucirea specifică respectiv pentru unghiul de răsucire pe o lungime dată. Ele sunt date de obicei în o/m respectiv o, de aceea este necesar a fi transformate în rad/m respectiv rad. Pentru rezolvarea problemelor se calculează şi se trasează diagramele momentelor de torsiune, după care, în funcţie de natura problemei, se aplică relaţiile din tabelul 7.1, care a fost întocmit pe baza relaţiilor (7.41), (7.44). În probleme de dimensionare se adoptă cel mai mare dintre diametrele obţinute pe baza celor două criterii. În problemele de verificare, trebuie satisfăcute cerinţele ambelor criterii. În probleme de tip c) interesează valoarea minimă a momentului capabil, după care se determină valorile momentelor exterioare care pot fi aplicate barei. În probleme static nedeterminate, la care momentele exterioare care produc solicitarea de torsiune nu pot fi obţinute numai cu ecuaţiile de echilibru (v. de exemplu figura 7.3, b), se pot scrie întotdeauna condiţii suplimentare de deformaţie. Astfel, pentru exemplul din figura 7.3, b, condiţia suplimentară este ϕ14 = ϕ12 + ϕ23 + ϕ34 = 0, în care se foloseşte relaţia (7.33).

REZISTENŢA MATERIALELOR 46
Criteriul de rezistenţă Criteriul de rigiditate Criteriul Tipul problemei τa Se dă θa Se dă ϕa
a) Dimensionare maxtpnec
a
MW ≥τ
maxtpnec
a
MIG
≥θ
maxtpnec
a
M lIG
≥ϕ
b) Verificare maxtef a
pef
MW
τ = ≤ τ maxtef a
pef
MGI
θ = ≤ θ maxtef a
pef
M lGI
ϕ = ≤ ϕ
c) Moment capabil tcap pef aM W= τ tcap pef aM I G= θ atcap pefM I G
lϕ
=

Torsiunea liberă a barelor drepte
47
Teste
T 23. Relaţia dintre putere P şi momentul M aplicat arborelui la turaţia n este :
1. [ ] [ ][ ]
9,55/ min
P kWM kNm
n rot= ,
2. [ ] [ ] [ ]7,55 / minM kNm P kW n rot= ,
3. [ ] [ ] [ ]955 / minM kNm P kW n rot= ,
4. [ ] [ ][ ]
7,55/ min
P kWM kNm
n rot= ,
5. [ ] [ ][ ]
/ min9,55
n rotM kNm
P kW= ,
Tabel 7.1 T 24. Pentru un material, relaţia dintre constantele elastice E, G, υ este :
1. ( )2 1
EG =− υ
, 2. ( )2 1
EG =− υ
, 3. ( )
21
EG =− υ
, 4. ( )2 1
EG =+ υ
,
5. ( )1 2
EG =+ υ
T 25. Unghiul de răsucire specific pentru o bară de secţiune circulară solicitată la
torsiune este : 1. t pM GIθ = , 2. t
p
MGI
θ = , 3. p
t
GIM
θ = , 4. t
p
M lGI
ϕ = , 5. t pM GIϕ =
T 26. Tensiunea tangenţială maximă în secţiunea transversală a unei bare, de secţiune circulară, solicitată la torsiune este : 1. funcţie de modulul de elasticitate longitudinal al materialului din care este confecţionată bara ; 2. funcţie de momentul de inerţie axial ; 3. funcţie de modulul de rezistenţă polar ; 4. funcţie de modulul de rezistenţă ; 5. funcţie de momentul de torsiune T 27. Modulul de rezistenţă polar pentru o secţiune inelară este :
1. 4
4(1 )64yDI π
= −α ; 2. 4
4(1 )32pDI π
= −α ; 3. 3
16pDW π
= ; 4. 3
3(1 )16pDW π
= −α ;
5. 3
4(1 )16pDW π
= −α
T 28. Se consideră un arbore în trepte acţionat de cuplurile M1 şi M2 . Dacă tensiunile tangenţiale maxime pe cele două tronsoane sunt egale, atunci relaţia dintre M1 şi M2 este : 1. 2 115M M= ; 2. 2 3 1M M= ; 3. 2 5 1M M= ; 4. 2 17M M= ; 5. 2 19M M=
dM2
M1
0,5d

REZISTENŢA MATERIALELOR 48
T 29. Un arbore cu diametrul de 4 cm este fixat la capete şi solicitat de două momente 61,884 10M x Nm= m ca în figură. Tensiunea maximă în arbore are valoarea de : 1. 25MPa ; 2. 50MPa ; 3. 75MPa ; 4. 100MPa ; 5. 125MPa .
d
2l
M
l M
l
.

8. FLAMBAJUL BARELOR DREPTE COMPRIMATE
8.1 INTRODUCERE
În componenţa diverselor construcţii inginereşti există elemente care la anumite valori ale încărcărilor numite critice îşi pot schimba configuraţia geometrică stabilă trecând într-o nouă configuraţie geometrică, instabilă. Fenomenul poartă numele de pierdere a stabilităţii şi este specific mai ales structurilor zvelte. În general, elementele care şi-au pierdut stabilitatea nu-şi mai pot îndeplini funcţiile pentru care au fost proiectate, fiind surse de avarii grave, uneori dezastruoase. Există şi elemente la care este acceptată posibilitatea pierderii stabilităţii, însă odată cu aceasta se înrăutăţeşte capacitatea portantă a ansamblului din care elementele respective fac parte. În ambele cazuri asigurarea stabilităţii este condiţia hotărâtoare în stabilirea dimensiunilor. De aceea, este foarte important să se cunoască valorile încărcărilor critice, condiţiile în care se poate produce pierderea stabilităţii şi consecinţele acesteia. Încărcările şi modurile de pierdere a stabilităţii sunt de o foarte mare diversitate pentru diferite elemente ale construcţiilor inginereşti. În ce priveşte barele, un caz cu importanţă practică deosebită este cel al barelor comprimate. Se face menţiunea că în anumite condiţii barele zvelte (confecţionate din profile subţiri) îşi pot pierde stabilitatea şi datorită încărcărilor ce produc încovoierea sau torsiunea acestora. Fenomenul de pierdere a stabilităţii formei rectilinii de echilibru a unei bare comprimate la o anumită valoare a forţei de compresiune, numită forţă critică, se mai numeşte flambaj. În cele ce urmează se vor prezenta câteva aspecte privind pierderea stabilităţii prin compresiune a barelor în domeniul elastic. Bazele teoriei stabilităţii echilibrului elastic al barelor comprimate au fost puse de L. Euler cu mai mult de două secole în urmă. Concepţia lui Euler se bazează pe procedeul folosit în Mecanică pentru stabilirea naturii echilibrului unui solid rigid într-o poziţie dată (iniţială). Conform acestui procedeu, se analizează tendinţa de mişcare a solidului după deplasarea infinit mică a acestuia din poziţia iniţială într-o poziţie vecină: dacă solidul revine la poziţia iniţială echilibrul este stabil, dacă se îndepărtează şi mai mult de poziţia iniţială echilibrul este instabil, iar dacă nu mai revine în poziţia iniţială rămânând în poziţia deplasată, echilibrul este instabil la limită (indiferent). Cele trei tipuri de echilibru, stabil, instabil şi instabil la limită (indiferent) pot fi ilustrate pe modelul mecanic foarte simplu din figura 8.1, în care solidul este o bilă perfect sferică aşezată în punctul inferior al unei suprafeţe netede concave (cazul a), în punctul superior al unei suprafeţe netede convexe (cazul b) respectiv pe o suprafaţă netedă plană (cazul c). Energetic, pentru stabilirea naturii echilibrului în Mecanică se foloseşte teorema lui Lejeune-Dirichlet conform căreia echilibrul este stabil când energia potenţială este minimă în comparaţie cu energia potenţială din orice poziţie infinit vecină, este instabil când energia potenţială este maximă faţă de energia potenţială din orice poziţie infinit vecină şi este instabil la limită dacă în poziţii infinit

REZISTENŢA MATERIALELOR 50
vecine energia potenţială are aceeaşi valoare.
M
(L (L ' )
jEchilibru instabil la li i ăj(N (N ' )
jEchilibru i bilj
(S '' )
jEchilibru bilj
(S) (S ' )
e)
F > Fcr
d)
F < Fcr
f)
EIy
x l
C
C '
F = Fcr
w(x
Q Q Q
z
b)a) c)
Vo
Fig. 8.1
Conform concepţiei Euler, criteriul de instabilitate a formei rectilinii de echilibru pentru bara comprimată cu forţa F este existenţa la o valoare critică a forţei de compresiune a unei forme curbilinii de echilibru, vecină cu cea rectilinie, în care bara poate trece datorită unei mici forţe transversale Q. După înlăturarea forţei Q, bara nu mai revine la forma rectilinie iniţială de echilibru, rămânând în poziţia curbilinie de echilibru (figura 8.1, f). Acest mod de pierdere a stabilităţii se numeşte flambaj iar forţa critică se va nota în continuare cu Fcr şi se va numi forţă critică, forţă Euler sau forţă de flambaj. Pierderea stabilităţii conform concepţiei Euler are loc prin bifurcarea poziţiei de echilibru la valoarea Fcr ; până la atingerea forţei Euler bara se deformează numai prin compresiune, iar la valoarea Fcr , w poate avea orice valoare. Forţa F nu poate fi mai mare decât Fcr iar săgeţile w rămân nedeterminate ca mărime, putându-se obţine numai forma deformatei barei. Relaţia dintre F şi w este reprezentată grafic în figura 8.2 prin linia frântă (a). Aşa cum se va vedea, valoarea Fcr se determină din ecuaţia diferenţială liniară a încovoierii (6.56) în care momentul încovoietor se scrie pe forma curbilinie cu mici deplasări w (calcul de ordinul I). Dacă se renunţă la ipoteza micilor deplasări şi se consideră ecuaţia diferenţială exactă (6.53), devine posibil şi studiul comportării post-critice a barei în domeniul elastic şi deci stabilirea unei relaţii între forţa F > Fcr şi deplasările w. O astfel de relaţie (v. de exemplu [24], [28], [30]) arată că la creşteri foarte mici ale forţei F deplasările w au creşteri foarte mari (curba (b) în figura 8.2). Concepţia Euler are la bază modelul ideal al barei perfect drepte, confecţionată dintr-un material perfect omogen şi comprimată perfect centric în absenţa încărcărilor transversale. În realitate, barele comprimate au abateri inevitabile de la aceste condiţii ideale, putând fi încărcate şi cu forţe transversale.

Flambajul barelor drepte comprimate
51
w
FFcr
winiţia
w
F
c
bFa
Fig. 8.2
În consecinţă, barele comprimate se deformează şi prin încovoiere încă de la începutul aplicării forţei F. Studiul se face printr-un calcul de ordinul doi tot cu ecuaţia diferenţială liniară (6.56), ţinându-se seama de toţi factorii care influenţează deformata barei, relaţia dintre forţa F şi deplasările w rezultând neliniară. Se constată că în apropierea unei valori critice deformaţiile de încovoiere cresc extrem de rapid. Valoarea critică astfel determinată coincide cu valoarea Fcr obţinută pe baza concepţiei Euler. Acest mod de pierdere a stabilităţii se numeşte prin deformare continuă şi este reprezentat grafic prin curba (c) din figura 8.2. Deşi pierderea stabilităţii prin bifurcare nu are echivalent la construcţii reale, concepţia Euler a fost folosită cu foarte bune rezultate pentru găsirea forţei critice în domeniul elastic la bare şi plăci. Studiul stabilităţii sistemelor elastice se poate face prin integrarea directă a ecuaţiilor diferenţiale, prin metode energetice sau prin metode numerice. În cele ce urmează, studiul stabilităţii elastice a barelor comprimate se va face prin integrarea ecuaţiilor diferenţiale.
8.2 FLAMBAJUL ÎN DOMENIUL ELASTIC
8.2.1 Stabilirea ecuaţiei diferenţiale şi integrarea ei
Se consideră bara dreaptă ideală din figura 8.1, având legături oarecare la extremităţi, care permit însă apropierea reciprocă a lor. Sub acţiunea unei forţe perfect centrice de compresiune bara se comprimă rămânând rectilinie. Dacă se aplică barei o forţă mică exterioară transversală Q bara se încovoaie. Conform concepţiei Euler, dacă forţa de compresiune are valori inferioare forţei critice, după îndepărtarea forţei Q bara revine la forma iniţială rectilinie de echilibru (figura 8.1, c). Dacă forţa de compresiune atinge valoarea forţei critice Fcr (figura 8.1, a), bara nu mai revine la forma iniţială rectilinie de echilibru; ea rămâne în poziţia de echilibru caracterizată de săgeţile w(x). Cazul F > Fcr (figura 8.1, b) nu interesează. Forţa critică reprezintă deci acea forţă de compresiune pentru care este posibilă forma curbilinie de echilibru reprezentată cu linie continuă în figura 8.1, a, adică trebuie găsită forţa minimă, Fcr , pentru care w(x) ≠ 0 . (8.1) În presupunerea admisă că flambajul are loc în planul zx, deformata barei este descrisă de ecuaţia diferenţială a fibrei medii deformate
, (8.2) '' ( ) ( )y yEI w x M x= −

REZISTENŢA MATERIALELOR 52
unde Iy este momentul de inerţie al secţiunii barei faţă de axa normală pe planul în care bara flambează iar momentul încovoietor My(x) se calculează faţă de centrul de greutate C ' al secţiunii x în poziţia deformată a barei. Aşa cum s-a menţionat la p. 1.8, un astfel de calcul se numeşte de ordinul doi. Dacă în legătura din x = 0 apar reacţiunea Vo şi momentul Mo, momentul încovoietor My(x) are expresia
o o( ) ( )y crM x M V x F w x= + + . (8.3)
Înlocuind My(x) în (8.2), se obţine
. (8.4) ''o o( ) ( )yEI w x M V x F w x= − − − cr
Se elimină Vo şi Mo, derivând ecuaţia de două ori în raport cu x,
. (8.5) '''' ''( ) ( )y crEI w x F w x= −
Cu notaţia
2 2crcr y
y
FF E
EIα = ⇔ = α I , (8.6)
ecuaţia (8.5) devine '''' 2 ''( ) α ( ) 0w x w x+ = . (8.7)
Ecuaţia diferenţiala (8.7) este liniară şi omogenă, de gradul 4. Ea admite soluţii particulare de forma . Din condiţia ca ele să verifice ecuaţia diferenţială,
rezultă ecuaţia caracteristică
( ) ir xpiw x e=
4 2 2( α ) ir xi ir r e 0+ = , ce poate fi satisfăcută numai dacă
.2 2 2( α ) 0i ir r + = Rezolvând această ecuaţie se obţine
1,2 3,40 ; α 1 αr r= = ± − i= ± . (8.8)
Corespunzător rădăcinilor obţinute pentru ecuaţia caracteristică, soluţia ecuaţiei diferenţiale, 4 4
1 1( ) ( ) ii i r x
i pi ii iw x C w x C e= =
= == =∑ ∑ este
. (8.9) 1 2 3 4( ) α cosα sinαw x C C x C x C x= + + +
Primele trei derivate ale funcţiei (8.9) în raport cu x sunt:
, '2 3 4( ) α αsinα αcosαw x C C x C x= − +
, (8.10) '' 2 23 4( ) α cosα α sinαw x C x C x= − −
. ''' 3 33 4( ) α sinα α cosαw x C x C x= −
8.2.2 Condiţii la limită. Formula lui Euler
Constantele de integrare din (8.9) se determină din condiţiile la limită scrise pentru fiecare caz concret de rezemare. La fiecare din cele două extremităţi ale barei, x = 0 şi x = l, pot fi scrise câte două condiţii (v. p. 6.5.2). Aceste condiţii depind de legăturile pe care le are bara la extremităţi, legături care pot fi rigide sau elastice. În figura 8.3 sunt reprezentate patru cazuri de legături rigide, numite fundamentale. Se scriu condiţiile la limită care corespund acestor cazuri (v. şi p. 6.5.2).

Flambajul barelor drepte comprimate
53
a) Bara articulată la un capăt şi simplu rezemată la celălalt (fig. 8.3, a):
''
(0) 0 ,0
(0) 0 (0) 0 ;y
wx
w M
=⎧⎪= ⎨ = ← =⎪⎩ (8.11, a)
''
( ) 0 ,
( ) 0 ( ) 0 .y
w lx l
w l M l
=⎧⎪= ⎨ = ← =⎪⎩
b) Bara încastrată la un capăt şi simplu rezemată la celălalt (fig. 8.3, b):
'
(0) 0 ,0
(0) 0 ;
wx
w
=⎧⎪= ⎨=⎪⎩
(8.11, b)
''
( ) 0 ,
( ) 0 ( ) 0 .y
w lx l
w l M l
=⎧⎪= ⎨ = ← =⎪⎩
c) Bara încastrată la ambele capete (fig. 8.3, c) (una din încastrări este de tipul celei din figura 1.4, d):
'
(0) 0 ,0
(0) 0 ;
wx
w
=⎧⎪= ⎨=⎪⎩
(8.11, c)
'
( ) 0 ,
( ) 0 .
w lx l
w l
=⎧⎪= ⎨=⎪⎩
a)
T(lw
' (l)
Fcr x
z
lf
Fcr
l lf
Fcr
lf
Fcr
lf
lf = 0,5 l lf = 2 l lf = l lf = 0,7 l
b) c) d)
zzz
x x x
Fig. 8.3
d) Bara încastrată la un capăt şi liberă la celălalt (fig. 8.3, d). Având în vedere şi

REZISTENŢA MATERIALELOR 54
relaţiile , , se obţine: ''' 2 I( ) ( )y zEI w l T l= − cr yF E= α
'
(0) 0 ,0
(0) 0 ;
wx
w
=⎧⎪= ⎨=⎪⎩
(8.11, d)
''
''' 2 ' '
( ) 0 ( ) 0 ,
( ) α ( ) 0 ( ) ( ) .y
cr
w l M lx l
w l w l T l F w l
⎧ = ← =⎪= ⎨+ = ← =⎪⎩
Înlocuind (8.9) şi (8.10) în condiţiile la limită se obţine un sistem liniar şi omogen în C1, C2, C3, C4, având forma 4
1 , 1,jij jj a C i=
==∑ 4 . Ţinând seama de relaţia (8.1),
soluţia banală a acestui sistem nu poate fi acceptată deoarece conduce la w(x) = 0. Pentru ca sistemul în Ci să admită soluţii diferite de cea banală, determinantul sistemului trebuie să fie nul. Prin dezvoltarea determinantului se obţine ecuaţia de stabilitate (sau de echilibru la limită sau critic),
det[ ] 0ija = . (8.12)
În ecuaţia de stabilitate forţa Euler intervine atât explicit cât şi ca argument al funcţiilor trigonometrice, deci ecuaţia de stabilitate este transcendentă în αl. Ea are o infinitate de soluţii, αk
l. Din punct de vedere matematic, aceste soluţii sunt valori proprii ale ecuaţiei diferenţiale (8.7) iar funcţiile corespunzătoare lor, ( )
kw x α , sunt
funcţii proprii. Funcţiile proprii reprezintă axele deformate ale barei la pierderea stabilităţii. Ele depind de un factor nedeterminat. Din infinitatea de soluţii αk
l, interesează soluţia minimă, care se va nota cu (αo l).
Se mai introduce notaţia
o
fy yl ll
lπ= = μα
, (8.13)
unde lfy se numeşte lungime de flambaj iar μy coeficientul lungimii de flambaj, în presupunerea că bara comprimată flambează în planul zx. Înlocuind (8.13) în (8.6), se obţine formula lui Euler,
2
2y
crfy
EIF
lπ
= . (8.14)
Se face observaţia că bara comprimată va flamba în planul xy dacă 2/ / 2
z fz y fyI l I l< , unde lfz este lungimea de flambaj în planul xy. Rezultă
2 2
2 2min ,y zcr
fy fz
EI EIFl l
⎛ ⎞π π= ⎜
⎜ ⎟⎝ ⎠
⎟ . (8.15)
Dacă legăturile în planele zx şi xy sunt identice, adică lfz = lfy = lf , formula lui

Flambajul barelor drepte comprimate
55
Euler se scrie sub forma
2
min2crf
EIFl
π= , (8.16)
unde min min ( , )y zI I I= , (8.17)
deoarece interesează valoarea minimă a forţei critice.
8.2.3 Cazurile fundamentale de flambaj
1. Bara articulată la un capăt şi simplu rezemată la celălalt
Înlocuind (8.9) şi (8.10) în condiţiile la limită (8.11, a) şi ţinând seama că α ≠ 0, se obţine sistemul
, 1 3(0) 0 : 0w C C= + =
, ''3(0) 0 : 0w C= =
, 1 2 3 4( ) 0 : cos sin 0w l C C l C l C l= + α + α + α =
. ''3 4( ) 0 : cos sin 0w l C l C l= − α − α =
Se anulează determinantul sistemului,
1 0 1 00 0 1 0
01 cos sin0 0 cos sin
l l ll l
=α α α
− α − α
.
Dezvoltând determinantului după elementele liniei 2 se obţine ecuaţia de stabilitate sin αl = 0, având soluţiile pozitive . ( ) , 2 , 3 , ..., , ...l kα = π π π π
Soluţia minimă este αol = π, astfel încât din (8.13) se obţine lf = l . (8.18)
2. Bara încastrată la un capăt şi simplu rezemată la celălalt
Înlocuind (8.9) şi (8.10) în condiţiile la limită (8.11, b) şi ţinând seama că α ≠ 0, se obţine sistemul
, 1 3(0) 0 : 0w C C= + =
= , '2 4(0) 0 : 0w C C= +
, 1 2 3 4( ) 0 : cos sin 0w l C C l C l C l= + α + α + α =
. ''3 4( ) 0 : cos sin 0w l C l C l= − α − α =
Se anulează determinantul sistemului,

REZISTENŢA MATERIALELOR 56
1 0 1 00 1 0 1
01 cos sin0 0 cos sin
l l ll l
=α α α
− α − α
.
Se obţine mai întâi un determinant echivalent cu toate elementele primei linii nule cu excepţia primului element după care se face dezvoltarea după elementele acestei linii,
1 0 0 00 1 0 1
01 cos 1 sin0 0 cos sin
l l ll l
=α α − α
− α − α
⇒ 1 0 1
cos 1 sin 00 cos sinl l l
l lα α − α =
− α − α .
În determinantul de ordinul trei obţinut se face zero ultimul element al primei linii, după care se face dezvoltarea după elementele acestei linii,
1 0 0
cos 1 sin 00 cos sinl l l l
l lα α − α − α =
− α − α ⇒
cos 1 sincos sin
l ll l
lα − α − α− α − α
.
Dezvoltând determinantul de ordinul doi, rezultă sin αl – αl cos αl = 0. Presupunând cos αl ≠ 0, se obţine ecuaţia de stabilitate tan αl = αl .
g
αo l=
α
π 1,5–
0,5
gff
Fig. 8.4
Reprezentând grafic funcţiile f (αl) = tan αl şi g (αl) = αl , ca în figura 8.4, se observă că rădăcina minimă pozitivă a ecuaţiei de stabilitate este αol ≅ 1,41π (pentru acest argument, cosinusul este ≠ 0). Din (8.13) rezultă
lf ≅ 0,7 l . (8.19)
3. Bara încastrată la ambele capete
Înlocuind (8.9) şi (8.10) în condiţiile la limită (8.11, c) şi ţinând seama că α ≠ 0, se

Flambajul barelor drepte comprimate
57
obţine sistemul
, 1 3(0) 0 : 0w C C= + =
=
=
, '2 4(0) 0 : 0w C C= +
, 1 2 3 4( ) 0 : cos sin 0w l C C l C l C l= + α + α + α =
. '2 3 4( ) 0 : sin cos 0w l C C l C l= − α + α
Se anulează determinantul sistemului,
1 0 1 00 1 0 1
01 cos sin0 1 sin cos
l l ll l
=α α α
− α α
.
Se obţine mai întâi un determinant echivalent cu toate elementele primei linii nule cu excepţia primului element, după care se face dezvoltarea după elementele acestei linii,
1 0 0 00 1 0 1
01 cos 1 sin0 1 sin cos
l l ll l
=α α − α
− α α
⇒ 1 0 1
cos 1 sin 01 sin cosl l l
l lα α − α =
− α α .
În determinantul de ordinul trei obţinut se face zero ultimul element al primei linii, după care se face dezvoltarea după elementele acestei linii,
1 0 0cos 1 sin 0
0 sin cos 1l l l l
l lα α − α − α =
− α α − ⇒
cos 1 sinsin cos 1
l ll l
lα − α − α− α α −
=
=
.
Prin dezvoltarea determinantului de ordinul doi (folosind şi unele identităţi trigonometrice), rezultă sin αl/2(sin αl/2 – αl/2 cos αl/2) = 0. O primă soluţie este αo1l = 2π. O altă soluţie satisface ecuaţia tan αl/2 = αl/2, de unde rezultă (v. cazul b) αo2l = 2,82 π (cos αo2l ≠ 0). Se observă că rădăcina minimă a ecuaţiei de stabilitate este αol = 2π. Din (8.13) rezultă lf = 0,5 l . (8.20)
4. Bara încastrată la un capăt şi liberă la celălalt
Înlocuind (8.9) şi (8.10) în condiţiile la limită (8.11, d) şi ţinând seama că α ≠ 0, se obţine sistemul
, 1 3(0) 0 : 0w C C= +
, '2 4(0) 0 : 0w C C= +
, ''3 4( ) 0 : cos sin 0w l C l C l= − α − α =
''' 2 ' 3 33 4( ) ( ) 0 : sin cosw l w l C l C l+ α = α α − α α +

REZISTENŢA MATERIALELOR 58
22 3 4( cos cosC C l C l) 0+α α − α α + α α = .
Se anulează determinantul sistemului,
1 0 1 00 1 0 1
00 0 cos sin0 1 0 0
l l=
α − α ,
prin dezvoltarea căruia se obţine uşor cos αl = 0, adică αol = π/2. Din (8.13) rezultă lf = 2 l . (8.21)
Observaţie Din cazurile prezentate mai sus se observă (v. fig. 8.3) că lungimea de flambaj este distanţa dintre două puncte consecutive de inflexiune de pe forma deformată a barei care a flambat (forma deformată se consideră prelungită şi în afara reazemelor barei).
8.3 DOMENIUL DE APLICABILITATE A FORMULEI LUI EULER. FLAMBAJUL BAREI ÎN DOMENIUL PLASTIC
Pe baza forţei Euler, Fcr, se poate calcula tensiunea Euler,
2 2 2
2min min2 2
crcr
f f
F EI i EEA l A l
π2
πσ = = = π =
λ , (8.22)
unde A şi imin reprezintă aria respectiv raza minimă de inerţie a secţiunii transversale a barei, iar λ se numeşte coeficient de zvelteţe sau de subţirime,
minmin
min, flIi
A i= λ = . (8.23)
Coeficientul de zvelteţe depinde atât geometria barei (prin A, Imin şi l) cât şi de modul de rezemare al acesteia (prin μ = lf /l , v. (8.13)). Relaţia (8.22) se reprezintă grafic în sistemul de axe λ-σ printr-o hiperbolă cubică având ca asimptote axele de coordonate (v. fig. 8.5). Se observă că tensiunea Euler creşte pe măsură ce coeficientul de zvelteţe scade. In deducerea relaţia (8.22) s-a considerat că materialul se comportă liniar elastic, adică s-a considerat valabilă legea lui Hooke. Rezultă că relaţia de calcul a tensiunii Euler este valabilă atât timp cât σcr nu depăşeşte limita de proporţionalitate a materialului, adică
2
o2 saupp
E Eπ≤ σ → λ ≥ π λ ≥ λ
σλ , (8.24)
unde s-a notat

Flambajul barelor drepte comprimate
59
op
Eλ = π
σ . (8.25)
σ
flambaj
λ
σcr
σp
λoλ1
flambaj elasto-
hiperbola lui Euler
dreapta lui Tetmajer-
parabola lui
compresiun
B
CD σr
Fig. 8.5
Se observă că λo depinde numai de mărimile mecanice E şi σp ale materialului. El nu este un coeficient de zvelteţe ci numai o mărime de comparaţie. Pentru oţeluri cu conţinut redus de carbon cum este de exemplu OL37, care are E = 210 ⋅103 MPa şi σp = 190 MPa , λo are valoarea
3
o210.10 105
190λ = π ≅ . (8.26)
Dacă bara are coeficientul de zvelteţe λ mai mic decât λo , formula lui Euler nu mai este valabilă deoarece în momentul pierderii stabilităţii tensiunea este mai mare decât σp. Forţa respectiv tensiunea critică la care se produce pierderea stabilităţii trebuie determinată cu considerarea relaţiei reale între tensiuni şi deformaţii, care nu mai este dată de legea lui Hooke. În acest caz se spune că flambajul are loc în domeniul elasto-plastic. Au fost efectuate numeroase studii teoretice şi experimentale pentru determinarea forţei critice în domeniul elasto-plastic. Înainte de a prezenta relaţiile cele mai uzual folosite, se face observaţia că barele cu coeficient foarte mic de zvelteţe (bare cu lf mic şi imin mare) nu flambează chiar dacă tensiunea atinge sau depăşeşte limita de curgere σc . Întrucât atingerea valorii σc reprezintă o stare limită, tensiunea de compresiune se limitează la valoarea σc, reprezentată în figura 8.5 prin dreapta BC. Relaţiile pentru calculul tensiunilor critice de flambaj în domeniul elasto-plastic stabilesc legătura între σcr şi λ < λo . Grafic ele se reprezintă prin curbe racordate la hiperbola lui Euler şi dreapta BC. Astfel, Johnson a propus o relaţie parabolică de tipul σcr = α – βλ2 (v. fig. 8.5), unde constantele α şi β depind de material. Prin prelucrarea rezultatelor experimentale, Tetmajer şi Iasinski au propus relaţia liniară simplă (v. fig. 8.5)
σcr = a – bλ . (8.27)

REZISTENŢA MATERIALELOR 60
Relaţia (8.27) este valabilă pentru σcr mai mic decât limita de curgere a materialului (şi mai mare, evident, decât σp) , adică
1saucc
aa b
b− σ
− λ ≤ σ → λ ≥ λ ≥ λ , (8.28)
unde s-a notat
1ca
b− σ
λ ≥ . (8.29)
Rezultă că relaţia (8.27) este valabilă pentru
λ1 < λ < λo . (8.30)
Valorile a (MPa) şi b (MPa) precum şi ale coeficienţilor adimensionali λo şi λ1 pentru câteva materiale sunt date în tabelul 8.1.
Tabel 8.1 Material a [MPa] b [MPa] λo λ1
OL37 (σc = 240 MPa) 314 1,12 105 60
OL48 (σc = 310 MPa) 460 2,57 100 60
OL52 (σc = 360 MPa) 577 3,74 100 60
OL cu 5% nichel 461 2,25 86 0
OL crom-molibden 980 5,3 55 0
Duraluminiu 372 2,14 50 0
Lemn 28,7 0,19 100 0
8.4 CALCULUL LA FLAMBAJ
Problema care se pune în orice calcul la flambaj al barei constă în determinarea forţei (sau tensiunii) critice de flambaj şi impunerea condiţiei ca forţa (sau tensiunea) efectivă de compresiune a barei să fie mai mică decât cea critică, realizându-se şi un coeficient de siguranţă cf la flambaj cel puţin egal cu un coeficient de siguranţă admisibil (impus) la flambaj, caf , adică
saucr crf af
af
F FF cc F
≤ = c≥ , (8.31)
unde coeficientul de siguranţă admisibil este dat pentru diferite organe de maşini şi elemente de construcţii prin standarde sau norme iar forţa critică se determină, în funcţie de valoarea pe care o are coeficientul de zvelteţe al barei, cu una din următoarele relaţii:
2
mino2 dacăcr
f
EIFl
π= λ ≥ λ , (8.32, a)

Flambajul barelor drepte comprimate
61
, 1 o( ) dacăcrF A a b= − λ λ ≤ λ < λ (8.32, b)
. 1dacăcr cF A= σ λ < λ (8.32, c)
În problemele de calcul la flambaj intervin mărimi privind geometria barei (lungimea, forma şi dimensiunile secţiunii transversale), legăturile acesteia, caracteristicile mecanice ale materialului din care bara este confecţionată inclusiv coeficienţii a şi b din relaţia lui Tetmajer-Iasinski, forţa de compresiune şi coeficientul de siguranţă admisibil. Ca şi în cazul solicitărilor simple (axială, încovoiere, torsiune), şi la flambaj se pun trei probleme şi anume: verificare, calculul forţei capabile sau dimensionare. Primele două probleme sunt similare. Într-o problemă de verificare sunt date toate elementele menţionate mai sus şi se cere să se verifice dacă este îndeplinită relaţia (8.31). Într-o problemă de calcul a forţei capabile sunt date de asemenea toate elementele menţionate, mai puţin forţa de compresiune, care se determină din relaţia (8.31), . /cr afF F c≤
Într-o problemă de dimensionare sunt date toate elementele menţionate, mai puţin dimensiunile secţiunii transversale ale acesteia (forma secţiunii se cunoaşte). Problemele de dimensionare la flambaj sunt mai dificile decât primele două probleme
datorită faptului că, nefiind cunoscute dimensiunile secţiunii transversale, nu se poate determina coeficientul de zvelteţe λ pentru a vedea care din relaţiile (8.32) este aplicabilă. Din acest motiv se presupune valabilă formula lui Euler şi din relaţia (8.32, a), ţinând seama şi de (8.31), se obţine relaţia
2
min2
1af
f
EI cF lπ
> ,
din care se determină momentul de inerţie minim necesar,
2
min 2af fc F l
IE
>π
. (8.33)
Cunoscând forma secţiunii se determină dimensiunile secţiunii care realizează momentul Imin, după care, calculând şi aria secţiunii, se determină coeficientul de zvelteţe λ cu relaţia (8.23). Se compară λ cu λo şi λ1. Dacă λ ≥ λo, dimensiunile obţinute sunt cele necesare. Dacă λ < λ1, se reface dimensionarea cu relaţia (8.31), ţinând seama de (8.32, c), obţinându-se
c
ac
FAcσ
≥ . (8.34)
unde pentru caf s-a luat coeficientul de siguranţă la compresiune, cac. Dacă λ1
< λ < λo, se redimensionează bara cu relaţia Tetmajer-Iasinski. Observând că forţa critică dată de formula lui Euler este mai mică decât cea dată de

REZISTENŢA MATERIALELOR 62
relaţia lui Tetmajer-Iasinski, se majorează dimensiunile obţinute din (8.33) şi se face verificarea coeficientului folosind relaţia (8.32, b), adică se calculează
fa bc
F− λ
= . (8.35)
Dacă cf ≥ caf (dar apropiat de caf ), noile dimensiuni sunt cele necesare. În caz contrar, se majorează din nou dimensiunile şi se reface procedura de verificare, care se repetă până se obţine cf ≥ caf . De obicei, două iteraţii sunt suficiente. În cazul în care dimensiunile secţiunii depind de un singur parametru t, acesta se poate obţine direct din ecuaţia
min
( )( ) / ( )
faf
lA t a b F c
I t A t
⎡ ⎤− =⎢ ⎥
⎢ ⎥⎣ ⎦ . (8.36)
Teste T30. Flambajul este : 1) fenomenul de curbare a unei bare solicitate la încovoiere ; 2) fenomenul de deformare a unei bare solicitată axial ; 3) fenomenul de pierdere a stabilităţii formei rectilinii de echilibru a unei bare comprimate; 4) fenomenul de deformare a unei bare solicitate la forfecare ; 5) fenomenul de pierdere a stabilităţii formei rectilinii de echilibru a unei bare solicitate axial; T31. Condiţiile la limită pentru o bară comprimată încastrată la un capăt, scrise pentru a integra ecuaţia diferenţială de ordin 2, ce descrie deformarea barei sunt:
1) '''
''' 2 ' '''
( ) 0 ( ) 0 ,(0) 0 ,0
( ) α ( ) 0 ( ) ( ) .(0) 0 ;y
cr
w l M lwx x l
w l w l T l F w lw
⎧⎧ = ← ==⎪ ⎪= =⎨ ⎨+ = ← ==⎪ ⎪⎩ ⎩
2) 3) ' '
(0) 0 , ( ) 0 ,0
(0) 0 ; ( ) 0 .
w w lx x l
w w
= =⎧ ⎧⎪ ⎪= =⎨ ⎨= =⎪ ⎪⎩ ⎩ l
l
l'' ''
(0) 0 , ( ) 0 ,0
(0) 0 ; ( ) 0 .
w wx x l
w w
= =⎧ ⎧⎪ ⎪= =⎨ ⎨= =⎪ ⎪⎩ ⎩
4) ''
' ''' 2 ' '
(0) 0 , ( ) 0 ( ) 0 ,0
(0) 0 ; ( ) α ( ) 0 ( ) ( ) .y
cr
w w l M lx x l
w w l w l T l F w l
⎧=⎧ = ← =⎪ ⎪= =⎨ ⎨= + = ← =⎪ ⎪⎩ ⎩
5) ' ''
(0) 0 , ( ) 00
(0) 0 ; ( ) 0
w w lx x l
w w l
= =⎧ ⎧⎪ ⎪= =⎨ ⎨= =⎪ ⎪⎩ ⎩
T32. Expresia forţei critice la care are loc fenomenul de pierdere a stabilităţii, pentru
o bară comprimată simplu este: 1) 2
min2cr
f
EIFl
π= ; 2)
2min
24crEIFl
π= ;
3) 2
min2cr
EIFl
π= ; 4)
2min
20,49crEIF
lπ
= ; 5) 2
min20,25cr
EIFl
π= ;

Flambajul barelor drepte comprimate
63
T33. Pentru o secţiune dreptunghiulară cu laturi egale cu 2, respectiv 3 cm, momentul de inerţie axial minim al secţiunii este: 1) 4
min 4I cm= ; 2) 4min 4,5I cm= ; 3)
4min 6I cm= ; 4) 4
min 24I cm= ; 5) 4min 2I cm= ;
T34. Lungimea de flambaj pentru o bară comprimată, încastrată la un capăt şi rezemată la celălalt capăt, este: 1) lungimea barei, 2) jumătate din lungimea barei, 3) dublul lungimii barei; 4) 0,7 din lungimea barei, 5) distanţa dintre două puncte succesive de inflexiune a barei deformate T35. Coeficientul de zvelteţe este raportul dintre : 1) lungimea de flambaj şi momentul de inerţie axial ; 2) lungimea barei şi momentul de inerţie axial minim ; 3) lungimea de flambaj şi aria secţiunii transversale ; 4) lungimea de flambaj şi raza de inerţie minimă ; 5) lungimea barei şi momentul de inerţie; T36. Limitele de valabilitate ale formulei lui Euler de calcul a forţei critice sunt : 1) 106 110λ≤ ≤ ; 2) 105λ ≥ ; 3) 1 0λ λ λ≤ ≤ ; 4) domeniul elasto-plastic ; 5) flambaj elastic T37. Coeficientul de siguranţă la flambaj este : 1) 1f
cr
FcF
= ≥ ; 2) 1crf
FcF
= ≥ ; 3)
1crf
FcF
= ≤ ; 4) 1crf
FcF
= = ; 5) 1fcr
FcF
= ≤ ;
T38. Lungimea maximă ce poate să o aibă bara (de secţiune circulară cu diametrul D) comprimată de forţa F ( vezi figura 8.6), cunoscând coeficientul de siguranţă
admisibil la flambaj , este : 1) afc2 4
16 af
EDlc F
π≥ ; 2)
2 42
32 af
Dlc F
π≤ ; 3)
2 4
64EDl
Fπ
≤ ;
4) 3 4
64 af
EDlc F
π≤ ; 5)
2 3
64 af
EDlc F
π≤ ;
F
l
z
x
F
l
z
x
3h
2h
Fig. 8.6 Fig. 8.7 T39. Valoarea maximă a forţei de compresiune ce poate solicita bara (figura 8.7)
astfel încât aceasta să nu-şi piardă stabilitatea este : 1) 2 4
max 28 EhF
lπ
≥ ;

REZISTENŢA MATERIALELOR 64
2) 2 4
max 28 EhF
lπ
≤ ; 3) 2 4
max 218 EhF
lπ
≥ ; 4) 2 4
max 24,5 EhF
lπ
≤ ; 5) 2 4
max 29,81
0,5EhF
lπ
≥ ;
T40. Cunoscând coeficientul de siguranţă admisibil la flambaj, , pentru bara
comprimată din figura 8.8, mărimea parametrului t este : 1)
3afc =2
4 0,04l FtE
≤ ;
2) 2
42
430
afl Fct
Eπ≥ ; 3)
24 4l Ft
E≥ ; 4)
20,04l FtE
≥ ; 5) 2
3 0,04l FtE
≤ ;
F
x
z
l6t
4t
3t
2t
Fig. 8.8

9. SOLICITAREA COMPUSA
9.1 INTRODUCERE
Se numeşte solicitare compusă a unei bare, solicitarea produsă de 2 sau mai multe eforturi (din cele 6 prezentate în capitolele precedente), care acţionează simul-tan asupra secţiunii transversale. În fig. 9.1, sunt reprezentate atât cele 6 eforturi: N – forţă axială ;T , Ty z – forţe tăietoare sau de forfecare; M – moment de torsiune sau de răsucire; M , Mt y z – momente încovoietoare, precum şi tensiunile care apar pe faţa pozitivă a unei secţiuni transversale.
Deoarece eforturile se obţin prin reducerea faţă de C a tensiunilor ce acţionează pe suprafaţa A a secţiunii transversale, se pot scrie următoarele relaţii de echivalenţă între tensiuni şi eforturi (secţionale):
(9.1) d , d , d ,
d , d , ( )d
y zA A A
y yx z zx t zx yxA A A
N A M z A M y A
T A T A M y z
= σ = σ = − σ
= τ = τ = τ − τ
∫ ∫ ∫∫ ∫ ∫ .A
zyO
τx
Faţa negativă a Faţa pozitivă a
Tz
τyx
BMy
zτzx
Ty Mz
AxaN
Mzyx
My
Ty Axa
secţiunii
CMt Mt
σ
p
N TzC
Fig. 9.1
După cum s-a prezentat în cap. 3 eforturile pot fi determinate cunoscând solici-tările exterioare. Astfel, în baza relaţiilor (9.1) se pot scrie următoarele relaţii de calcul pentru tensiuni :
( )( )
( )( )
; ; ; ; ; ty z y y zzzx yx
py z y z
M z T S z T S yN M yA I I b z I b y I
σ = σ = σ = τ = τ = τ =M rI
(9.2)

REZISTENŢA MATERIALELOR 66
9.2 TIPURI DE SOLICITARI COMPUSE
Solicitări compuse care produc numai tensiuni normale
In cazul în care sarcinile exterioare determină apariţia eforturilor secţionale:, moment încovoietor după axa y My , moment încovoietor după axa z Mz , atunci tensiunea normală într-un punct al secţiunii transversale se obţine prin însumarea algebrică a tensiunilor normale, ce au fost calculate în baza relaţiilor (9.2), după cum urmează: '' ' ' ' 'σ σ σ σ= + + (9.3)
unde: σ’ sunt tensiuni normale produse de forţă axială N
' NA
σ = ;
σ’’ sunt tensiuni normale produse de momentul încovoietor după axa y, My
' ' y
y
M zI
σ = ;
σ’’’ sunt tensiuni normale produse moment încovoietor după axa z, Mz
''' z
z
M yI
σ = ;
Solicitări compuse care produc numai tensiuni tangenţiale
Dacă sarcinile exterioare determină apariţia eforturilor secţionale: moment de torsiune M , forţă tăietoare după axa z, T , forţă tăietoare după axa y, Tt z y , atunci tensiunile tangenţiale produse de fiecare efort secţional într-un punct al secţiunii transversale, calculate în baza relaţiilor (9.2):
produse de forţa tăietoare după axa z, Tτzx z
y
yz
IzbzST
)()(
τzx = ;
produse de forţa tăietoare după axa y, Tτyx y
z
zy
IybyST
)()(= ; τyx
τt produse de momentul de torsiune Mt
p
t
IrM= ; τ
se însumează vectorial.
Solicitări compuse care determină apariţia tensiunilor normale şi a tensiunilor tangenţiale
Dacă sarcinile exterioare determină apariţia atât a tensiunilor normale cât şi a tensiunilor tangenţiale, atunci verificarea solicitării într-un punct al secţiunii transversale se face calculând o tensiune normală echivalentă conform unei teorii de rezistenţă.

Solicitări compuse ________________
67
9.3 SOLICITARI COMPUSE CARE CONDUC LA APARITIA TENSIUNILOR NORMALE
9.3.1.Solicitări compuse de încovoiere cu forţă axială
Tensiunile normale ce apar în cazul acestui tip de solicitare se calculează cu re-laţia :
y
y
IzM
AN
z
z
IyM σ (y,z) = + - (9.4)
In relaţia (9.4), valorile eforturilor N, My, Mz, se introduc cu semnele lor din
diagramele de eforturi corespunzătoare secţiunii periculoase pentru care se face calculul.
Pentru determinarea tensiunii normale maxime, se determină poziţia axei neutre. Conform definiţiei : axa neutră este locul geometric al tuturor punctelor, ce aparţin secţiunii transversale date, în care tensiunile normale sunt nule. Din condiţia anulării tensiunilor normale σ (y ) = 0 rezultă: ,zn n
y
ny
IzM
AN
z
nz
IyM + - = 0 (9.5)
Relaţia (9.5) reprezintă ecuaţia axei neutre (vezi fig. 9.2) iar punctele de coordonate ( y , zn n ) sunt punctele ce aparţin axei neutre, respectiv punctele în care σ = 0.
B2(YB2,ZB2)
z
(n)
Axa neutră a secţiunii
C
(n)
B1(YB1,ZB1)
σ
D1
D23d σmax
Fig. 9.2
Pentru a putea reprezenta axa neutră, se determină intersecţiile axei neutre cu axele de coordonate :
yn
y
N IzA M
→ = − y = 0 (9.6) n

REZISTENŢA MATERIALELOR 68
zn
z
N IyA M
→ = z (9.7) = 0 n
Relaţiile (9.6) şi (9.7), reprezintă coordonatele a două puncte ce aparţin axei
neutre, D1 0, y
y
N IA M
⎛ ⎞−⎜ ⎟⎝ ⎠
, 0z
z
N IA M
⎛⎜⎝ ⎠
⎞⎟şi D 2 . Se trasează axa neutră ( presupunând că N
> 0, M > 0, My z > 0). In punctele cele mai îndepartate de axa neutră tensiunile normale au valori ex-
treme. Se poate observa că acest punct este B (Y1 B1,ZB1). Inlocuind în relaţia (9.4) coordonatele y, z cu coordonatele punctului B1, se găseşte valoarea tensiunii din punctul B1. Tensiunea maximă va fi egală cu: σB1= σ (9.8) max
După determinarea tensiunii normale maxime se pune condiţia: σmax ≤ σ (9.9) a
Etapele de rezolvare a problemelor de solicitări compuse de tip 1 - Se stabilesc diagramele N, My, M ; z- Se stabileşte secţiunea cea mai solicitată ( secţiunea cea mai periculoasă ) pe baza diagramelor. Dacă secţiunea periculoasă nu se poate evalua prin observaţie directă, atunci se efectuează calculul pentru toate secţiunile care pot fi periculoase. Pentru o astfel de secţiune se scrie expresia (9.4); - Se scrie ecuaţia axei neutre (9.5). Se reprezintă grafic şi se vede care este punctul cel mai îndepartat de axa neutră (se găseşte punctul B ) şi se află coordonatele Y1 B1, ZB1; - Se calculează tensiunea normală σ în punctul B : 1
z
z
y
y
IyM
IzM
AN BB 11
−+ σB1 = = σ (9.10) max
- Se pune condiţia : σmax ≤ σ (9.11) a
- Se rezolvă problema de dimensionare, verificare sau sarcină capabilă.
9.3.2 Solicitări compuse de încovoiere după două direcţii
In absenţa solicitării axiale, relaţia (9.4) se scrie:
y
y
IzM
z
z
IyM σ (y,z) = - (9.12)
Ecuaţia axei neutre este :
y
ny
IzM
z
nz
IyM - = 0 (9.13)
Pentru a trasa axa neutră se observă că punctul O ( 0,0 ) verifică ecuaţia (9.13), drept urmare panta axei neutre este :
tg β n z
n y
z M Iy
zy M I= = (9.14)

Solicitări compuse ________________
69
Se trasează axa neutră, notată n-n (vezi fig. 9.3); se determină coordonatele
punctului cel mai îndepărtat de axa neutra B ⎟⎠⎞
⎜⎝⎛ −
2,
2hh
1 ; se determină tensiunea
maximă:
z
z
y
y
WM
WM
+z
z
y
y
WM
WM
+
22b
IM
hI
Mz
z
y
y
−
−⎟⎠⎞
⎜⎝⎛−
2,
2hb σmax = σB1 = σ = = (9.15)
Fig. 9.3
Conform figurii 9.3 se poate calcula:
tg α = y
z
MM (9.16)
In relaţia (9.16), unghiul α, este unghiul dintre My şi momentul Mr, rezultat din compunerea celor două momente My şi Mz.. Modulul acestui moment se poate calcula cu relaţia: Mr = 22
zy MM + (9.17) Comparând relaţiile (9.14) şi (9.16), se poate observa că pentru Iy = Iz (bare de
secţiune circulară, cum sunt arborii), α=β. Să considerăm o secţiune circulară (vezi figura 9.4 ), pentru care se determină tg β cu relaţia (9.14), se trasează axa neutră n-n, se determină coordonatele punctului B1, cel mai îndepărtat de axa neutră cu rela-ţiile:
yB1 = - sin2D
α ; zB1 = cos2D
α (9.18)
şi se înlocuiesc în relaţia (9.15), pentru a determina tensiunea normală maximă:
σB1 = cos sin cos sin2 2
y zy z
y zy z
D DM M M MI I W
α α
Wα α
+ = + (9.19)
α
b
z
β
B1 (h/2,-h/2)
y h C
MzMr
My
(n)
σmax
(n)

REZISTENŢA MATERIALELOR 70
α
z
α=β B1 (h/2,-h/2)
y C
MzMr
My
(n)
(n)
Fig. 9.4
Pentru o secţiune circulară modulul de rezistenţă este:
322
3DWp π= W= Wy = Wz = (9.20)
Din figura 9.4 rezultă că se pot scrie relaţiile: cosα (9.21) M = My îsinα (9.22) Mz = Mî
Înlocuind relaţiile (9.21), (9.22) în relaţia (9.19) aceasta devine:
y
î
WM
z
î
y
î
WM
WM αα 22 sincos
+ σB1= = (9.23)
unde: M 22
zy MM +î = (9.24)
Fig. 9.5 Pentru un punct ce aparţine fibrei medii a barei se pot determina deplasările
punctului, w(x) şi v(x), după deformare (vezi fig. 9.5), pe direcţiile axei z respectiv y, utilizând ecuaţiile diferenţiale ale fibrei medii deformate: EIyw’’(x) = - My(x) → w (x) (9.25) EIzv’’(x) = - Mz(x) → v (x) (9.26)
Cunoscând cele 2 deplasări w(x) şi v(x), se pot determina : δ(x) = 22 )()( xvxw + (9.27)
φ(x)
v(x)
z(v)
y(w) C
w(x)δ(x)

Solicitări compuse ________________
71
)()(
xvxw tgϕ(x) = (9.28)
Dacă ϕ(x) = constant, atunci încovoierea pe 2 direcţii se numeşte încovoiere oblică (axa deformată a barei este o curbă plană ).
Dacă ϕ(x) nu este constant, atunci încovoierea pe 2 direcţii se numeşte înco-voiere strâmbă.
9.3.3. Solicitarea axial excentrică
Este produsă de o forţă paralelă cu axa barei, F, care este dispusă excentric faţă de aceasta, acţionând în punctul Do, de coordonate y , z (vezi fig.9.6). o o
z
y D
z
xCo
F
C
Do(yo,zo)
zo
x
y
Fig. 9.6
Se determină torsorul echivalent în punctul Co, şi se scriu eforturile care apar
într-o secţiune oarecare efectuată la abscisa x: N = F (9.29) My = Fz (9.30) o M = - Fy (9.31) z o
z
(n)
σmax
B1
Do(yo,zo) zo
y
(n)
zn*
yn*
*
Fig. 9.7

REZISTENŢA MATERIALELOR 72
Inlocuind relaţiile (9.29), (9.30) şi (9.31), în relaţia (9.4), rezultă:
z
o
y
o
IyFy
IzFz
AF
++ σ (y,z) = (9.32)
Ecuaţia axei neutre este:
01=++
AIzz
Iyy
y
o
z
o σ = 0 : (9.33)
Pentru a trasa axa neutră se determină soluţiile :
o
z
o
zn y
iAyIy
2* −=−= z = 0 ; (9.34) n
o
y
o
yn z
iAzIz
2* −=−= y = 0 ; (9.35) n
După trasarea axei neutre, se determină punctul cel mai îndepărtat de aceasta, B (yB1 B1, zB1) şi se determină tensiunile normale maxime:
1 1o oB B
y z
Fz z Fy yFA I I+ + ≤ σB1 = σ σmax = (9.36) a
Observaţii: 1. Axa neutră trece întotdeauna prin cadranul opus aceluia prin care trece forţa axială excentrică.
1. Tensiunea maximă apare într-un punct de la periferia secţiunii care se găseşte întotdeauna în acel cadran prin care trece forţa excentrică.
. 9.4 SOLICITARI COMPUSE CARE CONDUC LA APARITIA
TENSIUNILOR TANGENTIALE
O aplicaţie la acest tip de solicitare compusă este arcul elicoidal cu spire strânse.
9.5 Solicitări compuse care conduc la apariţia tensiunilor normale şi tangenţiale
Aceste solicitări se studiază cu ajutorul teoriilor de rezistenţă care sunt valabile pentru orice corp ( bară, placă sau masiv ). In prezentul curs se vor prezenta teoriile de rezistenţă în cazul general, apoi se vor aplica la bare
9.5.1 Teorii de rezistenţă
Teoriile de rezistenţă se mai numesc şi ipoteze de rezistenţă sau teorii asupra stărilor limită.
Incercarea mecanică de bază este încercarea la întindere, pe baza căreia s-au determinat experimental cele mai importante caracteristici mecanice ale materialelor: limita de curgere, σ , rezistenţa la rupere, σc r, etc. In baza acestora s-a stabilit rezis-tenţa admisibilă, σa, luată în calcule.
Prin stare limită înţelegem atingerea limitei de elasticitate, σe, sau a limitei de curgere, σ , sau a rezistenţei la rupere, σc r, etc.

Solicitări compuse ________________
73
La solicitarea de întindere intensitatea solicitării poate fi definită prin mai mulţi parametrii:
1. Tensiune normală maximă σmax,
Emaxσ2. Alungire specifică maximă εmax =
2maxσ3. Tensiune tangenţială maximă τmax =
E2
2maxσ4.Energie specifică de deformaţie maximă U = 1
( ) 2max3
1 σν×
+E
5.Energie de deformaţie pentru modificarea formei U = 1f
La solicitarea spaţială, starea de tensiuni într-un punct, este definită de torsorul tensiune. Această stare de tensiune poate fi caracterizată şi de tensiunile principale σ σ σ1> 2> 3.
Teoriile de rezistenţă dau expresiile tensiunilor normale echivalente, σech, care fac posibilă compararea stării complexe de solicitare, cu solicitarea la tracţiune. Astfel au apărut 5 ipoteze clasice de rezistenţă sau criterii de echivalare între starea de tensiuni spaţială şi cea monoaxială. Acestea sunt:
Ipoteza I cunoscută şi sub numele Ipoteza tensiunii normale maxime (Galilei ) :
Două stări de tensiune sunt echivalente când au aceeaşi tensiune normală maximă σ1, sau starea limită în cazul unei solicitări spaţiale se atinge atunci când tensiunea normală maximă σ1 a solicitării spaţiale atinge valoarea pe care o are tensiunea limită a solicitării monoaxiale.
σ =σ (9.37) 1 ech;
Ipoteza întâi se aplică atunci când starea de tensiune pe o direcţie σ1, este pre-ponderent mai mare decât celelalte 2.
Ipoteza II cunoscută şi sub numele Ipoteza deformaţiei specifice maxime (Mariotte) : Starea limită la o solicitare spaţială se atinge atunci când deformaţia specifică maximă la solicitarea spaţiala atinge valoarea pe care o capătă deformaţia specifică în starea limită monoaxială.
( )EEEechσσσνσ =+− 321
1 εmax= ; (9.38)
Ipoteza a doua se aplică pentru materiale fragile (fontă, sticlă ) şi materiale ca-
sante. Ipoteza III cunoscută şi sub numele Ipoteza tensiunii tangenţiale maxime
(Coulomb - Mohr) : Starea limită la o solicitare spaţială conform ipotezei a treia, se

REZISTENŢA MATERIALELOR 74
atinge atunci când tensiunea tangenţiala maximă, la solicitarea spaţială, atinge valoarea pe care o capătă tensiunea tangenţială maximă la starea limită monoaxială.
2231 echσσσ=
− τmax= ; (9.39)
Ipoteza a treia şi a cincea se aplică cu bune rezultate şi sunt bine confirmate
experimental în cazul materialelor tenace ( ductile ).
Ipoteza IV cunoscută şi sub numele Ipoteza energiei potenţiale totale de deformaţie (Beltrami) : Starea limită la o solicitare spaţială se atinge atunci când energia potenţială specifică totală de deformaţie atinge valoarea pe care o capătă U1 la starea limită monoaxială.
U ([ ])EEech
22
21 2
13322123
22
21
σσσσσσσνσσσ =++−++ = ; (9.40) 1
Ipoteza a patra se recomandă în cazul în care tensiunea medie este pozitivă:
3321 σσσ ++ σ > 0 . (9.41) m =
Ipoteza V cunoscută şi sub numele Ipoteza energiei potenţiale specifice
pentru modificarea formei (Huber-Hencky-Mises) : Starea limită la o solicitare spaţială se atinge atunci când energia potenţiala specifică de deformaţie pentru modificarea formei atinge valoarea pe care o capătă energia potenţiala specifică pentru modificarea formei la starea limită monoaxială.
( ) ( ) ( )[ ] 2213
232
2211 2
61
61
echf EEU σνσσσσσσν +
=−+−+−+
= (9.42)
Ipoteza a treia şi a cincea se aplică cu bune rezultate şi sunt bine confirmate
experimental în cazul materialelor tenace ( ductile ).
Rezultă pentru tensiunile echivalente relaţiile de calcul : (9.43) 1σσ =I
ech
( )321 σσνσσ +−=IIech (9.44)
(9.45) 31 σσσ −=IIIech
( )13322123
22
21 2 σσσσσσνσσσσ ++−++=IV
ech (9.46)
( ) ( ) ([ ])213
232
2212
1 σσσσσσσ −+−+−=Vech . (9.47)
Să considerăm un caz particular şi anume starea plană de tensiune cu σ2=0, atunci relaţiile (41) – (45) devin: (9.48) 1σσ =I
ech
(9.49) 31 νσσσ −=IIech

Solicitări compuse ________________
75
(9.50) 31 σσσ −=IIIech
3123
21 2 σνσσσσ −+=IV
ech (9.51)
3123
21 σσσσσ −+=V
ech (9.52)
Pentru bare, tensiunile principale se calculează cu relaţia:
( ) 223/1 4
21
2 xyyxyx τσσ
σσσ +−±
+= (9.53)
Pentru bara solicitată ca în fig. 7 putem scrie relaţiile:
σσ =x , (9.54)
, (9.55) 0=yσ
ττττ =+= 22zxyxx , (9.56)
pentru care relaţia (51) se scrie:
223/1 4
21
2τσσσ +±= (9.57)
Inlocuind relaţia (54) în relaţiile care dau tensiunile echivalente pentru starea plană de tensiune obţinem relaţiile de calcul pentru tensiunile echivalente utilizate la bare:
22 45,05,0 τσσσ ++=Iech (9.58)
22 465,035,0 τσσσ ++=IIech (9.59)
22 4τσσ +=IIIech (9.60)
22 6,2 τσσ +=IVech (9.61)
22 3τσσ +=Vech (9.62)
9.5.2 Arborilor solicitaţi numai la încovoiere şi răsucire
In cazul arborilor solicitaţi la încovoiere în ambele planuri, se va calcula un mo-ment încovoietor rezultant, utilizând relaţia:
22zy MM + M = (9.63) î
se vor determina tensiunile normale :

REZISTENŢA MATERIALELOR 76
y
î
WM
=σ ; (9.64)
unde:
322
3DWW p
yπ
== , (9.65)
după care se vor determina tensiunile tangenţiale
p
t
WM
=τ (9.66)
Conform ipotezei întâi :
( )
2 2
2 2
2 2
0,5 0,5 44
1 0,5 0,5
I î î tech
y y y
Iî
î î ty y
M M MW W W
M echM M MW W
σ
aσ
= + + =
= + + =
, (9.67)
≤
deci, pentru bară, se calculează un moment încovoietor echivalent. Expresiile aces-tuia, pentru toate ipotezele de rezistenţă, se determină analog modului în care s-a determinat pentru ipoteza întâi. Efectuând calculele rezultă urmatoarele expresii :
225,05,0 tîîIî MMMechM ++= (9.68)
2265,035,0 tîîIIî MMMechM ++= (9.69)
22tî
IIIî MMechM += (9.70)
22 65,0 tîIVî MMechM += (9.71)
22 75,0 tîVî MMechM += (9.72)

Solicitări compuse ________________
77
TESTE 10d π=T41 Cât este valoarea forţei F ce poate solicita bara circulară, de diametru ,
(vezi figura 9.8) dacă tensiunea maximă nu trebuie să depăşească valoarea 176MPa . 1) 250 N ; 2) 500 N ; 3) 750 N ; 4) 1000 N ; 5) 1250 N ; 6) 1500 N ;
y
z
x
F
dF
4F
3d d
d Fig. 9.8 T42 Să se dimensioneze bara din figura 9.9 dacă rezistenţele admisibile sunt
20F kN=100ac MPaσ = 80at MPaσ =şi iar valoarea forţei este . 1) 25 mm; 2) 26,5 mm; 3) 35 mm; 4) 30,5 mm ; 5) 32 mm ; 6) 22,5 mm ;
y z
xFb
2b
16b
Fig. 9.9
T43 Să se calculeze forţa capabilă pentru bara din figura 9.9 dacă rezistenţele admisibile sunt 35b mm=100ac MPaσ = 80at MPaσ =şi şi . 1) 32,5 kN ; 2) 24,5 kN; 3) 35 kN; 4) 29,2 kN; 5) 25 kN; 6) 29 kN ;
100d mm=T44 Pentru bara circulară cu diametrul , cunoscând şi , tensiunea echivalentă după teoria a III-a de rezistenţă are valoarea cuprinsă
între :
10 /p kN= md6a =
1). 95 şi 99 MPa; 2) 90 şi 95 MPa; 3) 100 şi 106 MPa; 4) 80 şi 89 MPa; 5) mai mare decât 120 MPa; 6) mai mică decât 80 MPa;
Fig. 9.10
y z
xp
a
2pa
10pa

10. STUDIUL DEPLASĂRILOR PRIN METODE ENERGETICE
10.1 INTRODUCERE
Se numesc energetice metodele bazate pe noţiunea de energie de deformaţie şi lucru mecanic. C finala C initialaE E L− = (10.1)
Pentru fenomene statice Teorema Energiei Cinetice se poate scrie sub forma:
0i eL L+ = , (10.2) unde:
iL U= − , (10.3) Li este lucrul mecanic al forţelor interioare şi este egal şi de sens contrar cu energia potenţiala de deformaţie, iar:
eU L= , (10.4) reprezintă formularea matematică a Teoremei lui Clapeyron. Se consideră o bară într-o stare spaţială de solicitare; tensiunile ce apar în sec-ţiunile transversale ale barei, date de eforturile ce sunt prezente în aceste secţiuni se pot calcula cu relaţiile:
y zx
y z
M z M yNA I I
σ = + + ; (10.5)
y
yz
IzbzST
)()( ; (10.6) T →τz zx =
z
zy
IybyST
)()( T = ; (10.7) τy→ yx
p
t
IrM M →τt t = ; (10.8)
σx , tensiunile normale, după axa x, produse de: forţa axială N, momentul încovoietor după axa y, My , momentul încovoietor după axa z, Mz , τzx produse de forţa tăietoare după axa z, τyx produse de forţa tăietoare după axa y, τt produse de momentul de torsiune.
Energia de deformare are expresia:

Studiul deplasărilor prin metode energetice ________________
79
1 1 ( )2 2
Tx x y y z z xy xy yz yz zx zx
V V
U dVσ ε σ ε σ ε σ ε τ γ τ γ τ γ= = + + + + +∫ ∫ dV (10.9)
Eσε = In relatia (10.9) se va înlocui (legea lui Hooke pentru materiale elastice),
se va lua în considerare că pentru bare : 0 ; 0y y z zσ ε σ ε= = , iar pentru bare su-puse la solicitări compuse tensiunile normale după axa x se calculează cu relaţia (9.6), astfel energia de deformare a unei bare numai din tensiunile normale va avea expresia :
2( ) 21 1 1
2 2 2y z
x xy zV V A l
M z M yNU dV dVE E A I I
σ σ ε σ⎛ ⎞
= = = + +⎜⎜⎝ ⎠
∫ ∫ ∫ ∫ dAdx⎟⎟
0;=
(10.10)
Efectuând calculele şi se ţinând seamă de relaţiile: (10.11) 2 2; ; ; 0;y z
A A A A A
z dA I y dA I dA A ydA zdA= = = =∫ ∫ ∫ ∫ ∫ rezultă :
2 22( )
2 2 2y z
y zl
M MNUEA EI EI
σ⎛ ⎞⎜= + +⎜⎝ ⎠∫ dx⎟
⎟ . (10.12)
Analog se scriu expresiile:
2 22( )
22
( )1 1 12 2 2 ( )
zx z yzx zx zx
yV V A l
T S zU dV dV
G G b z Iτ τ γ τ= = =∫ ∫ ∫ ∫ dAdx (10.13)
Notăm:
2
2
( )
( )fz y
zy A
A S zdA
I b zχ=∫ (10.14)
unde: χz – este un coeficient care ţine cont de neuniformitatea distribuţiei tensiunilor tan-genţiale τ pe înălţimea secţiunii; Afz – este aria la forfecare după axa z pentru elemente subţiri; este dată de ariile care sunt paralele cu axa z. Inlocuind (10.14) în (10.13) rezultă:
2( )
2zx z z
fzl
TU
GAτ χ
= ∫ dx (10.15)
Analog relaţiei (10.15) se obţine:

REZISTENŢA MATERIALELOR 80
2( )
2yx y y
fyl
TU
GAτ χ
= ∫ dx (10.16)
2 22
( ) 22
1 1 12 2 2 2
t t
ppV V A l l
M r MU dV dV dAdx
G G GIτ τγ τ= = = =∫ ∫ ∫ ∫ ∫ dx
I(10.17)
Insumând relaţiile (10.12), (10.15), (10.16) şi (10.17) se obţine expresia energiei de deformare pentru pentru o bară complex solicitată :
2 2 22 22
2 2 2 2 2 2y y y tz z z
y z fz fy pl
M T MM TNU dEA EI EI GA GA GI
χχ⎛ ⎞⎜ ⎟= + + + + +⎜ ⎟⎝ ⎠∫ x (10.18)
Pentru un sistem format din “n” bare expresia energiei de deformare devine:
2 2 22 22
1 2 2 2 2 2 2j
ny y y tz z z
j y z fz fy pl j
M T MM TNU dEA EI EI GA GA GI
χχ
=
⎛ ⎞⎜ ⎟= + + + + +⎜ ⎟⎝ ⎠
∑ ∫ x (10.19)
Observaţii: Energia de deformaţie este o funcţie pătratică, omogenă de eforturi, dar eforturile, în calculul liniar, sunt funcţii de încărcări la puterea a treia. Rezultă că energia potenţială de deformaţie este o funcţie pătratică de forţele exterioare. Pentru bare suficient de zvelte (care au lungime mare în raport cu dimensiunile secţiunii), în care apar toate cele 6 eforturi, ponderea principală o au termenii care conţin momentele încovoietoare şi momentul de torsiune, ceilalţi termeni ar putea fi neglijaţi. Există sisteme de bare în care unele dintre eforturi sunt nule: Exemplul 1. Sisteme de bare încărcate cu forţe numai în planul xz:
2
1 2j
ny
yj l
MU
EI=
⎛ ⎞⎜ ⎟=⎜ ⎟⎝ ⎠
∑ ∫ dx (10.20)
Exemplul 2. Sisteme de bare în care apar momente încovoietoare şi moment de torsiune:
2 22
1 2 2 2j
ny tz
y z pj l
M MMU
EI EI GI=
⎛ ⎞⎜= + +⎜⎝ ⎠
∑ ∫ dx⎟⎟
(10.21)
Exemplul 3. Sisteme de bare în care apar numai forţe axiale (grinzi cu zăbrele):
2
1 2j
n
j l
NUEA=
⎛ ⎞= ⎜ ⎟
⎝ ⎠∑ ∫ dx (10.22)

Studiul deplasărilor prin metode energetice ________________
81
Dacă Aj (x) = A (const) şi Nj j (x) = Nj (const), atunci:
2
2j j
N lUEA
⎛ ⎞= ⎜
⎝ ⎠∑ ⎟
i
(10.23)
10.2 Teorema lui Castigliano
Se consideră un sistem de bare încărcat cu un sistem de forţe: F , F , ……, F1 2 i , ….., F (cu precizarea că încărcările : F , F , ……, F , ….., Fn 1 2 i n , pot fi forţe sau mo-mente concentrate sau distribuite. Pe direcţiile forţelor Fi , i = 1….n, vor apare de-plasări notate cu Δi . Conform cu obs. 1 se poate considera funcţia energia de defor-maţie ca fiind : U = U(F , F , ……, F1 2 i , ….., F ). n Dacă dăm uneia dintre forţe o creştere infinit mică:
i iF F Fδ= + (10.24) e eU L U U L L U Leδ δ δ δ= → + = + → = (10.25)
ii
e i i i
e
UU FF
L F FU L
δ δ
δ δ δδ δ
∂ ⎫= ⎪∂ ⎪⎪= Δ →⎬⎪= ⎪⎪⎭
i ii
U FF
δ∂Δ =
∂ ii
UF∂
→ Δ =∂
(10.26)
Dacă se ţine cont de expresia energiei potenţiale de deformaţie dată de relaţia (10.19) atunci (10.26) devine:
1 j
ny y y y y t tz z z z z
ij i y i z i fz i fy i p il j
M M T T M MM M T TN N dxEA F EI F EI F GA F GA F GI F
χχ
=
⎛ ⎞∂ ∂ ∂∂ ∂∂Δ = + + + + +⎜ ⎟⎜ ⎟∂ ∂ ∂ ∂ ∂ ∂⎝ ⎠
∑ ∫ (10.27)
Relaţiile (10.26) şi (10.27) reprezintă expresia matematică a teoremei lui Casti-gliano care se enunţă astfel: Deplasarea punctului de aplicaţie al unei forţe Fi pe direcţia acestei forţe este egală cu derivata energiei potenţiale de deformaţie în raport cu aceea fortă. Observaţii: • Dacă Fi este moment concentrat, atunci Δi va reprezenta o deplasare unghiulară
(rotire) • Dacă rezultatul calculului este negativ, atunci deplasarea Δi, este în sens contrar
forţei Fi .

REZISTENŢA MATERIALELOR 82
• Dacă vrem să calculăm deplasarea (liniară sau unghiulară) într-un punct în care nu este aplicată forţă, atunci în acel punct, pe direcţia pe care vrem să calculăm deplasarea se introduce o forţă sau un moment fictiv. Se scriu expresiile eforturi-lor date de forţele exterioare inclusiv de forţa sau momentul fictiv, se face derivata în raport cu această forţă sau momentul fictiv după care se anulează forţa sau momentul fictiv.
• Dacă forţele sunt date numeric şi dorim să calculăm deplasarea pe direcţia uneia din aceste forţe, această forţă se notează cu un simbol, deoarece numai astfel se poate efectua derivata.
• Există sisteme de bare în care unele dintre eforturi sunt nule: Exemplul 1. Sisteme de bare încărcate cu forţe numai în planul xz:
1 j
ny y
iy ij l j
M Mdx
EI F=
⎛ ⎞∂Δ = ⎜ ⎟⎜ ⎟∂⎝ ⎠
∑ ∫ (10.28)
Exemplul 2. Sisteme de bare în care apar momente încovoietoare şi moment de torsiune:
1 j
ny y t tz z
iy i z i p ij l j
M M M MM M dxEI F EI F GI F=
⎛ ⎞∂ ∂∂Δ = + +⎜ ⎟⎜ ⎟∂ ∂ ∂⎝ ⎠
∑ ∫ (10.29)
Exemplul 3. Sisteme de bare în care apar numai forţe axiale (grinzi cu zăbrele):
1 j
n
iij l j
N N dxEA F=
⎛ ⎞∂Δ = ⎜ ⎟∂⎝ ⎠
∑ ∫ (10.30)
10.3 Formula Mohr Maxwell. Procedeul Verescheaghin
Se consideră un sistem de bare încărcat cu un sistem de forţe: F , F , ……, F1 2 i , ….., F . (cu precizarea că încărcările : F , F , ……, F , ….., Fn 1 2 i n , pot fi forţe sau mo-mente concentrate sau distribuite. Eforturile vor fi funcţii de aceste încărcări exte-rioare :
1 2 1 1
1 2 1 1
1 2 1 1
1 2 1 1
1 2
( , ,......, , , ,........., )( , ,......, , , ,........., )
( , ,......, , , ,........., )( , ,......, , , ,........., )( , ,......,
i i i n
y y i i i n
z z i i i n
z z i i i n
y y i
N N F F F F F FM M F F F F F F
M M F F F F F FT T F F F F F FT T F F F
− +
− +
− +
− +
−
==
=== 1 1
1 2 1 1
, , ,........., )
( , ,......, , , ,........., )i i n
t t i i i n
F F F
M M F F F F F F+
− +
⎫⎪⎪⎪⎪⎬⎪⎪⎪
= ⎪⎭
(10.31)
Se notează :

Studiul deplasărilor prin metode energetice ________________
83
1, 01,2,...,. 1, 1,.....
i ji F Fj i i n
n N = == − +
= |• , reprezentând forţa axială dată de o forţă unitară ce
acţionează pe direcţia Fi , în condiţiile în care celelalte sarcini ( F , F , ……, F1 2 i-1 , Fi+1….., F sunt nule. n)
1, 01,2,...,. 1, 1,.....
i jyi y F Fj i i n
m M = == − +
= |• , reprezentând momentul încovoietor după axa y dat de o
forţă unitară ce acţionează pe direcţia Fi , în condiţiile în care celelalte sarcini ( F1 , F , ……, F2 i-1 , Fi+1….., F sunt nule. n)
1, 01,2,...,. 1, 1,.....
i jzi z F Fj i i n
m M = == − +
= |• , reprezentând momentul încovoietor după axa z dat de o
forţă unitară ce acţionează pe direcţia Fi , în condiţiile în care celelalte sarcini ( F1 , F , ……, F2 i-1 , Fi+1….., F sunt nule. n)
1, 01,2,...,. 1, 1,.....
i jt i t F Fj i i n
m M = == − +
= |• , reprezentând momentul de torsiune dat de o forţă unitară
ce acţionează pe direcţia Fi , în condiţiile în care celelalte sarcini ( F , F1 2 , ……, Fi-1 , Fi+1….., F sunt nule. n)
1, 01,2,...,. 1, 1,.....
i jyi y F Fj i i n
t T = == − +
= |• , reprezentând forţa tăietoare după direcţia axei y dată de o
forţă unitară ce acţionează pe direcţia Fi , în condiţiile în care celelalte sarcini ( F1 , F , ……, F2 i-1 , Fi+1….., F sunt nule. n)
1, 01,2,...,. 1, 1,.....
i jzi z F Fj i i n
t T = == − +
= |• , reprezentând forţa tăietoare după direcţia axei z dată de o
forţă unitară ce acţionează pe direcţia Fi , în condiţiile în care celelalte sarcini ( F1 , F , ……, F2 i-1 , Fi+1….., F sunt nule. n)
Cu notaţiile de mai sus relaţiile (10.28) devin:
1 2 1 1
1 2 1 1
1 2 1 1
1 2 1 1
1 2
( , ,......, , ,........., )( , ,......, , ,........., )
( , ,......, , ,........., )( , ,......, , ,........., )( ,
i i n i i
y y i i n yi i
z z i i n zi i
z z i i n zi i
y y
N N F F F F F n FM M F F F F F m F
M M F F F F F m FT T F F F F F t FT T F F
− +
− +
− +
− +
= += +
= += += 1 1
1 2 1 1
,......, , ,........., )
( , ,......, , ,........., )i i n yi i
t t i i n ti i
F F F t F
M M F F F F F m F− +
− +
⎫⎪⎪⎪⎪⎬⎪⎪+⎪
= + ⎪⎭
(10.32)
Utilizând relaţiile (10.29) se poate observa că derivatele parţiale ale eforturilor, în raport cu variabila Fi , ce apar în relaţia (10.27), se pot scrie sub forma:
; ; ; ; ;y y tz zi yi zi yi zi
i i i i i i
M T MM TN n m m t t mF F F F F F
∂ ∂ ∂∂ ∂∂= = = = = =
∂ ∂ ∂ ∂ ∂ ∂;t i (10.33)
Dacă se ţine cont de (10.30) în relaţia (10.27) se obţine formula lui Mohr-Maxwell:
1 j
ny yi y y yii z zi z z zi t ti
ij y z fz fyl j
M m T tNn M m T t M mdx
EA EI EI GA GA GIχχ
=
⎛ ⎞Δ = + + + + +⎜ ⎟⎜ ⎟
⎝ ⎠∑ ∫ (10.34)
p

REZISTENŢA MATERIALELOR 84
Observaţii: • Dacă în punctul în care se doreşte calcularea deplasării nu este aplicată nici o
forţă, în acel punct se introduce o forţă unitară şi se aplică în acel punct mersul de calcul:
- Se calculează eforturile date de toate încărcările exterioare: N, M , My z , T , Ty z , M . t- Se introduce în punctul în care se doreşte calculul deplasării liniare sau unghiulare, o forţă sau un moment unitar, după care se determină mărimile: n, m , m , t , t , my z y z t, (eforturile date numai din forţa sau momentul unitar) - Se introduc N, M , M , T , T , M şi n, m , m , t , t , my z y z t y z y z t în relaţia (10.31) şi se efectuează integrarea. • Dacă rezultatul este negativ, atunci deplasarea are sens contrar forţei unitare
introduse. • Dacă se doreşte calculul deplasării relative între 2 puncte, atunci în acele puncte
se introduce o pereche de forţe sau de momente având direcţia dată de cele 2 puncte şi sensuri contrarii.
• Forţa sau momentul unitar sunt adimensionale • In cazul sistemelor de bare alcătuite numai din bare drepte funcţiile n, m , m , ty z y ,
t , mz t, au variaţii liniare. In cazul barelor curbe, în relaţia (10.31), abscisa x se în-locuieşte cu arcul s (dx cu ds); pentru bare circulare abscisa x se înlocuieşte cu unghiul θ (dx cu dθ).
Procedeul Veresceaghin
In cazul barelor drepte integralele (10.31) pot fi efectuate utilizând procedeul Veresceaghin.
C
x
η
F(x)
dx
xc
l
f(x)
Ω
dΩ
Fig. 10.1
( ) ( )l
F x f x dx∫ Dacă se considera o integrală de forma: şi funcţia
( )f x Ax= + B având o variaţie liniară cu x, atunci:

Studiul deplasărilor prin metode energetice ________________
85
( ) ( ) ( )( ) ( ) ( )l l l l
F x f x dx F x A Bx dx F x Adx F x Bxdx= + = +∫ ∫ ∫ ∫ (10.35)
Din fig. 10.1, se poate observa că: , rezultă: ( )F x dx d= Ω
( ) ( ) ( )c cl l l
F x f x dx A d B xd A B x A Bx η= Ω + Ω = Ω + Ω = Ω + = Ω∫ ∫ ∫ (10.36)
In relaţia (10.33), Ω este aria diagramei neliniare a funcţiei F(x) iar η este ordonata din diagrama f(x) luată în dreptul centrului de greutate al ariei Ω. Aplicând relaţia (10.33), se pot calcula integralele din (10.31) considerând eforturile: N, M , My z , T , Ty z , Mt , în locul lui F(x), iar n, m , m y z , t , ty z , mt în loc de f(x).
Etape de lucru : 1.Se trasează diagramele de eforturi date de încărcările exterioare (ariile Ω) 2.In punctul şi pe direcţia deplasării căutate se aplică o forţă sau un moment unitar. Se trasează diagramele de eforturi date numai de forţa sau momentul unitar.
3. Corespunzător abscisei centrului de greutate al diagramei Ω, se ia cota ηdin diagramele de eforturi date de forţa unitară şi se înmulţeşte cu aria Ω. Se determină astfel deplasarea căutată.
10.4 Aplicaţii
1. Pentru încărcarea dată se cere să se determine săgeata, rotirea şi deplasarea pe orizontală a capătului liber al barei
a) Calculul deplasărilor utilizând teorema Castigliano
Fig. 10.2
l
Q
a) b)
Q
lw2
ϕ2
2 2 1 1
Relaţia (10.28) se simplifică şi mai mult prin dispariţia simbolului de însumare care se referă la bare sau tronsoane de bară pentru care momentul încovoietor are expresii diferite. În cazul din fig. 10.2, expresia momentului încovoietor este:
( )yM x Qx= − (10.37)
astfel, pentru orice deplasare, calculată în orice secţiune, relaţia (10.28) devine:
0
ly y
iy i
M MEI F
⎛ ⎞∂Δ = ⎜ ⎟⎜ ⎟∂⎝ ⎠
∫ (10.38)
Pentru calculul săgeţii în capătul liber se va deriva expresia momentului încovoietor în raport cu forţa Q care acţionează în punctul şi pe direcţia deplasării

REZISTENŢA MATERIALELOR 86
căutate. Astfel relaţia (10.38) devine :
20
ly y
y
M Mw
EI Q⎛ ⎞∂
= ⎜ ⎟⎜ ⎟∂⎝ ⎠∫ (10.39)
Calculând derivata momentului încovoietor în raport cu forţa Q şi înlocuind expresia derivatei şi a momentului încovoietor în relaţia (10.39) se obţine:
( ) ( )3 3
22
0 0 03 3
ll l
y y y
Qx Q Q x Qlw x dx x dxyEI EI EI
⎛ ⎞−= − = = =⎜ ⎟⎜ ⎟
⎝ ⎠∫ ∫
EI (10.40)
Pentru calculul rotirii în capătul liber expresia momentului încovoietor trebuie derivată în raport cu un moment m care acţionează în punctul şi pe direcţia deplasării unghiulare (rotirea) căutată. În secţiunea 2 nu acţionează moment concentrat.
l
Q
a) b)
Q
lw2
ϕ2
2 2 1 1
m
Fig. 10.3
Se va introduce momentul m fictiv, se va scrie expresia momentului încovoietor considerând şi momentul fictiv: ( )yM x m Qx= − − , se va deriva expresia momentului
încovoietor în raport cu momentul fictiv 1yMm
∂= −
∂, se va anula momentul fictiv din
expresia momentului încovoietor ( )yM x Qx= − . Se înlocuiesc sub integrală cele două expresii şi efectuând calculele se obţine:
( )2
20 0 0
12
l l ly y
y y y
M M Qx Q Qldx dx xdxEI m EI EI EI
ϕ⎛ ⎞∂ −
= = − =⎜ ⎟⎜ ⎟∂⎝ ⎠∫ ∫ ∫
y= (10.41)
b) Calculul deplasărilor utilizând formula Mohr Maxwell şi efectuând integralele
Relaţia (10.34) devine:
0
ly yi
iy
M mdx
EI⎛ ⎞
Δ = ⎜⎜⎝ ⎠∫ ⎟⎟ (10.42)

Studiul deplasărilor prin metode energetice ________________
87
( )yM x Qx= − Expresia momentului încovoietor este : Pentru calculul săgeţii se aplică barei, în absenţa încărcărilor exterioare dateo forţă unitară (sau un moment unitar) în punctul şi pe direcţia deplasării liniare (unghiulare) căutate.
l
1
a)
21
l
1
b
2 1
Fig. 10.4 Se scrie expresia momentului încovoietor dată de această încărcare,
. Se înlocuiesc sub integrală cele două expresii şi efectuând calculele se obţine:
( )ym x x= −
( ) ( )3 3
22
0 0 03 3
ll l
y y y
Qx Q Q x Qlw x dx x dxyEI EI EI
⎛ ⎞−= − = = =⎜ ⎟⎜ ⎟
⎝ ⎠∫ ∫
EI (10.43)
Pentru calculul rotirii se aplică barei, în absenţa încărcărilor exterioare date un moment unitar în secţiunea 2 (vezi fig. 10.4 b)). Se scrie expresia momentului încovoietor dată de această încărcare, ( ) 1ym x = − . Se înlocuiesc sub integrală cele două expresii şi efectuând calculele se obţine:
( )2
20 0 0
12
l l ly y
y y y
M M Qx Q Qldx dx xdxEI m EI EI EI
ϕ⎛ ⎞∂ −
= = − =⎜ ⎟⎜ ⎟∂⎝ ⎠∫ ∫ ∫
y= (10.44)
c) Calculul deplasărilor utilizând formula Mohr Maxwell aplicând procedeul Veresceaghin
Fig. 10.4
l
1
b)
21
l
1
c)
21
l
Q
a)
21
My
Ql
l
2l/3
1mw
mr
C
2l/3
1
Se trasează diagramele de momente încovoietoare din sarcină exterioară, din

REZISTENŢA MATERIALELOR 88
forţa unitară pe direcţia săgeţii din secţiunea 2, şi din momentul unitar în punctul şi pe
direcţia rotirii din secţiunea 2. Se aplică formula Mohr-Maxwell 0
ly yi
iy
M mdx
EI⎛ ⎞
Δ = ⎜ ⎟⎜ ⎟⎝ ⎠∫ .
Pentru calculul integralelor se aplică procedeul Veresceaghin. 3
22
1 1 22 3 3y y
Qlw Ql lEI EI
⎛ ⎞= ⎜ ⎟⎝ ⎠
= (10.45)
Analog se determină rotirea capătului liber
22
21 1
2 2y y
QlQlEI EI
ϕ ⎛ ⎞= =⎜ ⎟⎝ ⎠
(10.46)
Teste
3
2 8 y
qlwEI
=T45 Pentru grinda din figura 10.5 săgeata capătului liber este : 1) ;
4
2 18 y
qlwEI
=4
2 24 y
qlwEI
=4
2 8 y
qlwEI
=3
2 16 y
qlwEI
= 2) ; 3) ; 4) ; 5) ;
3
2 6 y
qlEI
ϕ =T46 Pentru grinda din figura 10.5 rotirea capătului liber este : 1) ;
2) 4
2 6 y
qlEI
ϕ = ; 3) 3
2 26 y
qlEI
ϕ = ; 4) 4
2 18 y
qlEI
ϕ = ; 5) 3
2 22 y
qlEI
ϕ = ;
3
2 12 y
MlwEI
=T47 Pentru grinda din figura 10.6 săgeata capătului liber este : 1) ;
2
2 2 y
MlwEI
=3
2 22 y
MlwEI
=2
274 y
MlwEI
=2
2 8 y
MlwEI
= 2) ; 3) ; 4) ; 5) ;
1
l
q 2
l
M
21
Fig. 10.5 Fig. 10.6
T48 Pentru grinda din figura 10.6 rotirea capătului liber este : 1) 2
2 3 y
MlEI
ϕ = ;
2) 2y
MlEI
ϕ = ; 3) 2
2 8 y
MlEI
ϕ = 2 18 y
MlEI
ϕ = 2 24 y
MlEI
ϕ = ; 4) ; 5) ;
3
176 y
FawEI
=T49 Pentru grinda din figura 10.7 săgeata punctului 1 este : 1) ;

Studiul deplasărilor prin metode energetice ________________
89
3
167 y
FawEI
=2
185 y
FawEI
=2
1y
FawEI
=3
1 2y
FawEI
=2) ; 3) ; 4) ; 5) ;
a
a
F
3
2 1
EIy 2EIy
a
2a
q
3 2
1
Fig. 10.7 Fig. 10.8
T50 Pentru grinda din figura 10.7 deplasarea pe orizontală a punctului 1 este :
1) 3
113 y
FauEI
=3
1y
FauEI
=2
123 y
FauEI
=3
153 y
FauEI
=3
173 y
FauEI
=;2) ;3) ;4) ;5) ;
2
1 3 y
FaEI
ϕ =T51 Pentru grinda din figura 10.7 rotirea punctului 1 este : 1) ; 2) 2
1 3 y
FaEI
ϕ = ;
3) 3
1 5 y
FaEI
ϕ = ; 4) 2
1 12 y
FaEI
ϕ =2
154 y
FaEI
ϕ =; 5) ;
T52 Pentru grinda din figura 10.7 deplasarea totală a punctului 1 este :
1) 3
173 y
FaEI
Δ =3
134 y
FaEI
Δ =3
1 1,74y
FaEI
Δ =3
1 1,54y
FaEI
Δ =3
1 2, 2y
FaEI
Δ =;2) ;3) ;4) ;5) ;
T53 Pentru grinda din figura 10.8 deplasarea pe orizontală a punctului 1 este :
1) 4
16
y
qauEI
=4
116
y
qauEI
=4
13
y
qauEI
=4
1 3 y
qauEI
=4
176 y
qauEI
=;2) ;3) ;4) ;5) ;

BIBLIOGRAFIE
[1] Alămoreanu E., Buzdugan Gh., Iliescu N., Mincă I. Sandu M., Îndrumar de calcul în Ingineria mecanică, Editura Tehnică, Bucureşti, 1996.
[2] Anghel A., Rezistenţa materialelor – partea I, Editura Tehnică, Bucureşti, 2001.
[3] Beleş A., Voinea R, Rezistenţa materialelor, vol. II Editura Tehnică Bucureşti, 1958.
[4] Bia C., Ille V., Soare M.V., Rezistenţa materialelor şi Teoria Elasticităţii, Editura Did. şi Pedagogică Bucureşti, 1983.
[5] Boleanţu L., Dobre I., Aplicaţii ale Mecanicii solidului deformabil în construcţia de maşini, Editura Facla, Timişoara 1978.
[6] Buga M., Iliescu N., Atanasiu C., Tudose I., Radu Gh., Probleme alese de Rezistenţa materialelor, Editura Univ. Politehnica, Bucureşti, 1995.
[7] Buzdugan Gh., Rezistenţa materialelor, Editura Academiei, Bucureşti, 1986.
[8] Buzdugan Gh. ş.a., Culegere de probleme din Rezistenţa materialelor, Editura Did. şi Pedagogică, Bucureşti, 1979.
[9] Buzdugan Gh., Blumenfeld M., Calculul de rezistenţă al pieselor de maşini, Editura Tehnică, Bucureşti, 1979.
[10] Chirică I., Elasticitate, Fundamente, Exemple, Aplicaţii, Editura Tehnică, Bucureşti, 1997.
[11] Ciofoaia V., Talpoşi A., Biţ C., Teoria elasticităţii şi plasticităţii, Editura Bravox, Braşov, 1995.
[12] Curtu I., Crişan R., Rezistenţa materialelor şi Teoria Elasticităţii, Univ. „Transilvania“ din Braşov, 1997.
[13] Deutsch I., Rezistenţa materialelor, E.D.P., Bucureşti, 1976. [14] Deutsch I., Goia I., Curtu I., Neamţu T. Sperchez F., Probleme
de Rezistenţa materialelor, E.D.P., Bucureşti, 1979. [15] Dimofte A., Rezistenţa materialelor - Culegere de probleme,
Editura Univ. din Galaţi, [16] Dobre I. ş.a., Culegere de probleme de Rezistenţa materialelor,
Univ. Politehnica „Traian Vuia“, Timişoara, 1988. [17] Feodosiev V.I., Resistance des materiaux, Ed. de la Paix,

BIBLIOGRAFIE 104
Moscou, 1977. [18] Gere J.M., Timoshenko S.P., Mechanics of Materials – 4th Edi-
tion, PWS Publishing Company, Boston, 1997. [19] Goia I., Rezistenţa materialelor, vol. I, Editura Transilvania,
Braşov, 2000. [20] Horbaniuc D., Leon D., Bârsănescu P., Rezistenţa materialelor.
Elasticitate – probleme, Editura Gh. Asachi, Iaşi, 1993. [21] Jiga G., Pastramă Şt.D., Teste grilă de rezistenţa materialelor.,
Editura Tehnică - INFO, Chişinău, 2004. [22] Mincă I., Atanasiu C., Sandu A., Sandu C., Rezistenţa
materialelor şi elemente de teoria elasticităţii. Solicitări simple, Editura Tehnică, Bucureşti, 1998.
[23] Mocanu C.I., Gavrilescu I., Rezistenţa materialelor, Editura Fundaţiei Universitare „Dunărea de Jos“, Galaţi, 1999.
[24] Mocanu D.R., Rezistenţa materialelor, Editura Tehnică, Bucureşti, 1980.
[25] Modiga M., Olaru V.D., Dimache A., Introducere în Mecanica mediilor continue şi în Mecanica microstructurală, Editura Tehnică, Bucureşti, 2001.
[26] Modiga M., Rezistenţa materialelor – Îndrumar de lucrări de laborator, Institutul Politehnic Galaţi, 1972.
[27] Modiga M., Rezistenţa materialelor, partea I, Editura Univ. din Galaţi, 1983.
[28] Munteanu M., Radu Gh.N., Popa A., Rezistenţa materialelor, Solicitări simple ale barelor, Univ. „Transilvania“ din Braşov, vol. I, II, 1988, 1990.
[29] Olaru V.D., Dimache A., Modiga M., Rezistenţa materialelor, vol. I, Editura Didactică şi Pedagogică, R.A.Bucureşti, 2004
[30] Nash W.A., Schaum's Outline of Theory and Problems of Strength of Materials – 4th Edition, McGraw-Hill Book Com-pany, New York, 1998.
[31] Ponomariov S.D. ş.a., Calculul de rezistenţă în construcţia de maşini – vol. I, II, III (trad. din limba rusă), Editura Tehnică Bucureşti, 1960, 1963, 1964.
[32] Posea N., Rezistenţa materialelor, Editura Did. şi Pedagogică, Bucureşti, 1979.
[33] Stoicescu L., Rezistenţa materialelor, vol. I, II, Editura Evrika, Brăila, 2004.

Solicitarea axială a barelor
105
[34] Teodorescu P.P., Ille V., Teoria elasticităţii şi introducere în Mecanica solidelor deformabile, vol. I, Editura Dacia, Cluj-Napoca, 1976.
[35] Timoshenko S.P., Goodier J.N., Theory of Elasticity, McGraw-Hill International Editions, Engineering Mechanics Series, New York, 1970.
[36] Timoshenko S.P., History of Strength of Materials, McGraw-Hill Book Company, New York – Dover Edition, 1983.
[37] Tudose I., Atanasiu C., Iliescu N.V., Rezistenţa materialelor, Editura Did. şi Pedagogică Bucureşti, 1981.
[38] Voinea R., Voiculescu D., Simion F.P., Introducere în Mecanica solidului cu aplicaţii în inginerie, Editura Academiei Române, Bucureşti, 1989.
[39] *** Institutul Român de Standardizare (IRS), Materiale metalice – ÎNCERCAREA LA TRACŢIUNE – Partea 1: Metodă de încercare la temperatura ambiantă , SR EN 10002-1, 1994, identic cu Standardul European EN 10002-1:1990.
[40] *** Manual pentru calculul construcţiilor, vol. 1, Editura Tehnică, Bucureşti, 1977.
[41] *** Manualul inginerului mecanic 1 , Editura Tehnică, Bucureşti, 1959.