112665882 Proiectarea Instalatiei de Incarcare Descarcare

of 63
-
Upload
cioara-ana-maria -
Category
Documents
-
view
279 -
download
9
Transcript of 112665882 Proiectarea Instalatiei de Incarcare Descarcare
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
1/63
UNIVERSITATEA MARITIM CONSTANA
FACULTATEA DE ELECTROMECANIC NAVALSPECIALIZAREA SISTEME ELECTRICE
LUCRARE DE LICEN
Conducator tiinific:Conf. univ. dr. ing. Violeta-Vali Ciucur
Absolvent:
Creu Mihai-Octavian
-2010-
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
2/63
UNIVERSITATEA MARITIM DIN CONSTANA
FACULTATEA DE ELECTROMECANIC NAVAL
SPECIALIZAREA SISTEME ELECTRICE
LUCRARE DE LICEN
Cargou mrfuri generale 7800 dwt.
Proiectarea instalatiei de
ncrcare-descarcare
COORDONATOR TIINIFIC:
Conf. univ. dr. ing. Violeta-Vali Ciucur
Absolvent:Creu Mihai-Octavian
-2010-
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
3/63
CUPRINS :
Introducere .....................................................................................................3
List tabelelor si a figurilor............................................................................4
CAPITOLUL I Generaliti. Stabilirea datelor iniiale pentru proiectarea n raport cu
destinaia i prevederile legislaiei n vigoare: .......................................................5
1.1. Instalaii de ncrcare descrcare
............................................................5
1.2. Clasificarea i descrierea instalaiei de ncrcare - descrcare cu bigi de
marf.....6
1.2.1. Biga propriu -
zis...........................................................................7
1.2.2. Manevre
curente.............................................................................8
1.2.3. Palancul de sarcin
.........................................................................8
1.2.4. Mecanisme de manevr
..................................................................81.3. Metode de utilizare a instalaiei de ncrcare - descrcare cu bigi navale...9
1.3.1. Metoda de operare cu o singur big cu un mandar dublu..................9
1.3.2 Metoda de operare cu dou bigi cu palancurile cuplate......................10
1.3.3 Metoda de operare cu dou bigi cu bigi mobile cuplate.....................10
1.3.4 Metoda de operare cu dou perechi de bigi fixe la gura de magazie....11
CAPITOLUL II Stabilirea schemei cinematice. Descrierea diagramei de sarcin
2.1. Mecanismul de ridicare asarcinii .............................................................14
2.2. Calculul transmisie prin
cablu .................................................................15
2.3. Dispozitivul de prindere a
sarcinii .............................................................15
2.4. Calculul de alegere a
cablului ..................................................................16
1
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
4/63
2.5. Calculul cablului de
traciune....................................................................16
2.6. Determinarea elementelor principale ale
tobei............................................17
2.7. Alegerea
cuplajului.................................................................................18
2.8. Reductorul............................................................................................18
2.9. Rolele de egalizare i
ghidare....................................................................19
CAPITOLUL III Alegerea motorului electric de acionare pentru mecanismul de ridicare
3.1. Alegerea preliminar a motorului
electric..................................................20
3.2. Alegerea motorului
electric.......................................................................20
3.3. Caracteristicile
mecanice..........................................................................21
CAPITOLUL IV Calculul diagramei de sarcin pentru mecanismul de ridicare..........25
4.1. Ridicarea sarcinii
nominale......................................................................25
4.2. Coborrea cu frnare a sarcinii
nominale...................................................26
4.3. Ridicarea crligului
gol............................................................................27
4.4. Coborrea forat a crligului
gol..............................................................29
4.5. Verificarea motorului din punct de vedere alproductivitii..........................31
4.6. Verificarea motorului electric la
nclzire..................................................31
CAPITOLUL V Calculul regimului tranzitoriu electromecanic.............................32
5.1. Determinarea momentului
volant.................................................................32
2
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
5/63
5.2. Determinarea constantei de timp pentru cele trei trepte de
vitez..................32
5.3. Determinarea timpilor de
pornire..............................................................33
5.4. Calculul timpilor de
frnare......................................................................33
CAPITOLUL VI Stabilirea schemei electrice a sistemului de acionare...................34
6.1. Date tehnice...........................................................................................34
6.2. Elementele componente ale schemei ...........................................................34
6.3. Principiul de funcionare al schemei..........................................................35
CAPITOLUL VII Calculul de alegere al aparatelor de comand si protecie ............40
7.1 Alegerea contactoarelor de vitez C3,C4,C5...............................................40
7.2. Alegerea contactorilor de sens C1,C2 .......................................................42
7.3. Alegerea contactorului de frn C6...........................................................43
7.4. Alegerea releului intermediar d3..............................................................44
7.5. Alegerea releului de tip d7........................................................................44
7.6. Alegerea releului minimal de tensiune d4...................................................45
7.7. Alegerea controlerului de comand...........................................................45
7.8. Alegerea siguranelor fuzibile...................................................................47
7.9. Alegerea ntreruptorului automat..............................................................47
7.10 Alegerea releelor termice..........................................................................48
CAPITOLUL VIII Tehnologia ntreinerii i reparrii sistemului de acionare
electric..........................................................................................................49
8.1. Reparaii i revizii...................................................................................49
8.1.1. Tehnologia stabilirii defectelor n instalaia electric..........................51
8.2 Principalele defecte i modul de remediere...........................................................53Concluzii.............................................................................................................................56
Bibliografie.........................................................................................................................57
INTRODUCERE
Navele moderne se caracterizeaz prin viteze de mar ridicate. De aceea, timpul de
parcurgere a unei curse este de acelai ordin de mrime cu timpul de staionare a navei n
porturi pentru ncrcarea si descrcarea mrfurilor. Cele mai mari pierderi de timp au loc in
3
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
6/63
timpul operaiunilor de ncrcare - descrcare efectuate n porturile insuficient echipate cu
mecanisme de ridicare. n acest caz, operaiile respective trebuie efectuate cu mijloace de
ncrcare - descrcare de la bordul navei. n ultimii ani s-a observat o cretere nentrerupt a
transporturilor de mrfuri navale datorit construirii unor tipuri speciale de nave echipate cu
mecanisme de ncrcare - descrcare de productivitate mrit, principalul rol n mrirea
productivitaii avndu-l automatizarea procesului de ncrcare si descrcare a navelor.
Automatizarea mecanismelor de ncrcare - descrcare trebuie sa le confere acestora
sigurana n funcionare, depanare comod, mase i gabarite reduse etc.
Productivitatea mecanismelor de ncrcare - descrcare n timpul diferitelor regimuri
de funcionare se caracterizeaz prin cantitatea de mrfuri descrcate n unitatea de timp.
Productivitatea practic trebuie difereniat de cea teoretic. Productivitatea practic
depinde nu numai de caracteristicile mecanismului de ncrcare - descrcare, ci i de felul
mrfurilor, de pregtirea mrfurilor pentru operaiile de ncrcare - descrcare etc.
Productivitatea teoretic depinde numai de caracteristicile mecanismului de ncrcare -
descrcare i este conditionat de viteza de ridicare a sarcinii, de viteza de coborare a
crligului fr sarcin, precum si de timpul de accelerare a acionrii.
Fiabilitatea funcionrii mecanismului de ncrcare - descrcare este n funcie de
fiabilitatea elementelor componente, inclusiv a acionrii electrice i a schemei de comand.
Simplitatea deservirii depinde de accesul uor la elementele componente care necesit
operaii de ntreinere i reparaii. Simplitatea comenzilor este condiionat de posibilitatea
efecturii comenzilor de ctre personalul necalificat.
Dezvoltarea sistemelor automate de ncrcare - descrcare se caracterizeaz prin
prezena ctorva nivele de automatizare. Sistemele cu comand direct, prin controler,
corespund primului nivel de automatizare. n cel de-al doilea nivel sunt cuprinse acionri
electrice care au scheme de comand la distant cu reacie invers. Cel de-al treilea nivel
prevede construirea unor posturi de comand centralizat a unor sisteme automate pentru ungrup de mecanisme de ncrcare - descrcare i utilizarea unor calculatoare de proces cu
scopul efecturii ntregului complex de operaii de ncrcare - descrcare fr participarea
operatorului.
List figuri
- Figura nr. 1 Biga de marf...................................................................12
- Figura nr. 2 Caracteristicile mecanice n = f (M)..24
4
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
7/63
- Figura nr. 3 Schema electric de acionare a mecanismului de ridicare-
coborre..
39
List tabele- Tabelul nr. 1 Parametrii motorului
electric..............................................................21
- Tabelul nr. 2 Caracteristica mecanic natural pentru treapta a III-a de
turaie......23
- Tabelul nr. 3 Caracteristica mecanic natural pentru treapta a II-a de
turaie........23
- Tabelul nr. 4 Caracteristica mecanic natural pentru treapta I deturaie ..............23
- Tabelul nr. 5 Regimul de
lucru..................................................................................30
- Tabelul nr.6 Diagrama
contactelor............................................................................46
5
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
8/63
CAPITOLUL I
Generaliti. Stabilirea datelor iniiale pentru
proiectarea n raport cu destinaia i prevederile legislaiei n vigoare
1.1. Instalaii de ncrcare descrcare:
Prin instalaii gravitaionale se nteleg sistemele mecanice care au ca scop
nvingerea, n prezena frecrii, a forelor de gravitaie, n vederea deplasrii pe vertical sau
pe orizontal a unor mase ca: mrfuri generale ( instalaii de ridicat ), brci de salvare sau de
serviciu ( instalaii de salvare ), capace mecanice ale gurilor de magazii.
Manipularea mrfurilor poate fi realizat cu:- instalaii cu bigi de marf
- instalaii cu cranice
- poduri rulante
- instalaii speciale ( benzi rulante )
Navele de transport maritim sunt, in general, dotate cu o instalaie de manipulare a
mrfurilor de construcie special n scopul efectuarii operaiilor de ncrcare - descrcare de
mrfuri.Aceast instalaie, numit de ncrcare - descrcare, esta adoptat si proiectat n
raport cu destinaia navei. Instalaia de ncrcare - descrcare ofer posibilitatea manipulrii
mrfurilor, independent de instalaiile portuare asigurandu-i, astfel, operativitatea n orice
port de escal.
Performanele tehnice i de exploatare ale instalaiei vor trebui s rspund
condiiilor generale de ordin economic privind reducerea staioarii navei n porturile de
escal.
6
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
9/63
Analizele economice arat c la cargouri ct i la navele de transport specializate
durata staionrii n porturi este mai mare decat timpul folosit pentru deplasri ntre porturile
de escal, iar n porturi majoritatea timpului este consumat n cadrul operaiunilor de
ncrcare - descrcare.
Instalaia de ncrcare - descrcare din dotarea majoritii navelor destinate
transportului de mrfuri generale i mai ales cele de constructie mai veche, se compune din
bigile navale de marf, cu toate mecanismele, manevrele curente i accesoriile relativ
complexe, implicate de utilizarea acestui sistem.
Numeroase nave, i n mod deosebit cargourile moderne de mrfuri generale, au
nlocuit instalaia clasic de ncrcare bazat pe bigi, prin macarale navale acionate electric
sau hidraulic, care mresc viteza de operare i sigurana n manipulare, dar sunt limitate n
privina capacitii de ridicare fa de posibilitatea bigilor i mai ales ale celor de mari
greuti.
Instalaiile de ncrcare - descrcare se caracterizeaz prin:
- capacitatea de ncrcare a mecanismului sau capacitate de ncrcare n siguran
SWL ( Safe Working Load ), care reprezint greutatea maxim admisibil ce poate fi
ridicat cu instalaia respectiv; ea cuprinde i greutatea dispozitivelor auxiliare
folosite pentru fixarea i manipularea ncrcturii: zbiruri, palancuri, platforme,
plase, bene, etc.;
- productivitatea instalaiei de ncrcare - descrcare , care este caracterizat de
cantitatea de marf n unitatea de timp;
- regimul de funcionare, care este determinat de caracteristica operaiei de ncrcare -
descrcare i funcie de natura marfii. Putem avea: regim de funcionare de lung
durat, regim de funcionare de scurt durat, regim de funcionare cu intermiten;
- sigurana n exploatare, ce caracterizeaz funcionarea fr ntrerupere a instalaiei
din punct de vedere mecanic i electric;- simplitatea montrii, ceea ce implic dispunerea ntregii instalaii pe acelai suport;
- deservire simpl, nelegnd prin aceasta accesul rapid i comod la instalaia de
ncrcare - descrcare pentru reparaii;
- simplitatea conducerii, adic punerea uoar n funciune i manevrarea simpl;
- economicitatea, adic pre de cost sczut al instalaiei, pre de ntreinere mic,
funcionare cu randament ridicat, consum energetic scazut;
7
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
10/63
1.2. Clasificarea i descrierea instalaiei de ncrcare - descrcare cu bigi de
marf:
Exist dou tipuri de bigi navale:
- biga uoar, care are capacitatea de ridicare sub 10 tf;
- biga grea, care are capacitatea de ridicare de 10 tf sau mai mult;
Instalaia de ncrcare - descrcare este compus din urmtoarele elemente:
- coloana ( catarg )
- biga de marf, din tub metalic sau o fles de lungime i diametru determinate,
articulat cu captul inferior aproape de baza coloanei; biga este mobil att n plan
orizontal ct i n plan vertical, n anumite limite calculate;
- manevrele curente, de regul sub forma unor palancuri, servind pentru orientarea
bigii n planul orizontal i vertical i la fixarea acesteia n poziie de lucru;
- palancul de sarcin, destinat ridicrii i coborrii coadei;
- mecanismele de manevr, troliu pentru balansin i vinci de marf pentru
manevrarea palancului de marf al bigii.
1.2.1. Biga propriu-zis:
Lungimea tubului metalic trebuie s asigure, la unghiul minim de operare, btaia
bigii pn la 2/3 din lungimea gurii de magazie pe care o deservete. n poziia de lucru n
afara bordului biga trebuie s bat minimum 2,5 m dincolo de copastia navei, la nclinare
= 30, aa nct s poat opera la vagoanele primei linii de cale ferat de lng cheu.
Diametrul bigii este mai mare la mijlocul lungimii tubului spre a putea suporta bine
efortul axial de compresie pe timpul lucrului n sarcin, ct i eforturile de ncovoiere la care
este supus pe timpul operaiunilor.
Captul superior al bigii este prevazut cu armturi sub forma unei brri cu urechi
pentru balansin, gaiuri i pentru palancul de sarcin.Captul inferior al bigii este articulat pe catargul suport sau pe coloane de bigi,
asigurndu-se micarea n nlime i pe orizontal.
Coloana de bigi este un arbore metalic tubular, mai scurt decat arborii navei, cu
diametrul relativ mare, deci foarte rezistent, pe care se articuleaz una sau mai multe bigi ale
instalaiei de ncrcare.
8
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
11/63
Btaia bigii ( raza de aciune ) este distana msurat n plan orizontal a poriunii de
la punctul de articulaie al bigii la coloan, pn la verticala palancului de sarcin. Este
variabil n raport cu unghiul de nclinare al bigii i cu lungimea acesteia. ( X = 1cos ).
Unghiul de nclinare al bigii este unghiul msurat n plan vertical, format de direcia
bigii cu planul orizontal. Pentru bigile uoare unghiul mediu de lucru se consider 30, iar
pentru bigile grele, 25.
Articulaia bigii la coloan trebuie s permit manevra simultan a bigii att n plan
orizontal, ct i n plan vertical, avnd rezistena cerut de eforturile de compresie ce se
exercit de-a lungul bigii sub sarcin.
1.2.2. Manevre curente:
a) Balansina bigii este manevra curent destinat s manevreze biga n plan vertical i
s o fixeze n poziia de lucru la un unghi de nclinare stabilit.
b) Gaiurile i contragaiurile, sunt manevre curente destinate orientrii bigii n plan
orizontal, fixarea acesteia n poziia de lucru i, la nevoie, n raport cu metoda de
lucru, rotirii bigii n direcie cu coada de marf.
c) Gaiul ( palancul ) de distanare, face legtura ntre capetele superioare a dou bigi
care opereaz la aceeasi magazie, dup una din metodele de lucru cu dou bigi.
Rolul gaiului de distanare constituit, de regul, dintr-un palanc cu macarale multiple,
este de a nlocui gaiurile interioare ale celor dou bigi descongestionnd astfel locul de
munc.
1.2.3. Palancul de sarcin:
Palancul de sarcin servete la manevra greutilor, macaraua superioar a palancului
se prinde de armtura captului superior a bigii. Captul trgtor iese prin macaraua
superioar sau prin macaraua inferioar, dup cum palancul funcioneaz trgnd sau
ridicnd i este dirijat prin pastica de ghidare la tamburul vinciului de marf.Tipul palancului de sarcin depinde de capacitatea de ridicare a bigii. La bigile de 1-3
tf capacitate, palancul este un mandar simplu spre a asigura o vitez de operare ct mai
mare. Pentru greutile mai mari se prevd palancuri cu macarale multiple, dar a cror vitez
de operare scade.
1.2.4. Mecanisme de manevr:
9
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
12/63
a) Troliile balansinelor sunt instalate la baza coloanelor de susinere a bigilor i pot
fi acionate independent sau de ctre vinciurile de marf, prin intermediul unui cablu de
transmisie. Sunt prevzute dispozitive cu clichet pentru evitarea desfurrii cablului n
cazul decuplrii vinciului sau deconectrii curentului electric. Pe tamburul troliului, captul
trgtor al balansinei este necesar s aib nfurate minimum 3 spire de cablu n poziia de
lucru, la unghiul minim de nclinare.
b) Vinciurile de marf pot fi acionate cu aburi, electric sau hidraulic i au rolul de
a manevra palancul de sarcin prin intermediul captului trgtor nfurat pe tamburul
vinciului.
Vinciul de marf are i tamburi pentru parme i la fiecare capt al axului pentru
manevre diferite la bord, inclusiv pentru manevra navei.
Vinciurile electrice au frn de mn sau de picior, folosind exclusiv pentru reglarea
vitezei de ridicare sau coborre a greutii, dar nu i pentru stopare.
De asemenea, dispun de o frn automat pentru oprirea manevrei n cazul
ntreruperii curentului din cauza unei defeciuni.
Unele vinciuri de for sunt prevzute cu dou sisteme de acionare dintre care unul
este destinat manevrei greutilor mari ( cu vitez mic ).
La vinciurile cu acionare hidraulic se prevd dispozitive care s exclud
posibilitatea cderii ncrcturii sau deplasrii necontrolate a bigii la scderea presiunii n
instalaia hidraulic.
Frnele vinciului trebuie s acioneze lin, fr ocuri.
Tamburele vinciurilor trebuie s aib o lungime care s permit nfurarea captului
trgtor ntr-un singur strat. Nu se admite nfurarea cablului pe mai mult de 3 straturi.
Tamburele vinciurilor cu cablu nfurat pe un singur strat trebuie sa aib straturi
elicoidale. Gulerele tamburelor netede trebuie s se nale deasupra stratului superior al
cablului cu cel puin 2,5 ori diametrul cablului.
1.3. Metode de utilizare a instalaiei de ncrcare - descrcare cu bigi navale:
Instalaia de ncrcare - descrcare cu bigi navale poate fi utilizat dup mai multe
metode de exploatare n raport de:
- numrul de bigi care deservesc o magazie;
- felul mrfii i greutatea diferitelor piese;
- condiiile specifice i sigurana n manipulare cerute de natura mrfii.
10
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
13/63
Bigile usoare navale sunt prevzute, n general, cu un palanc de sarcin de tipul
mandarului simplu, cu cablu de sarcin de diametru corespunztor greuttilor normale de
manipulat . Acest lucru conduce la avantajul asigurrii unei viteze mari de operare,
mandarul fiind cu un singur rai.
1.3.1. Metode de operare cu o singur big cu un mandar dublu:
Este cea mai eficient metod de exploatare spre a manipula greuti mai mari dect
capacitatea de ridicare a mandarului simplu, respectnd capacitatea de ridicare n siguran a
bigii.
Se utilizeaz cnd la o magazie se dispune de o singur big sau, cnd din diferite
motive, nu se poate folosi a doua big. Biga se armeaz uor, se manevreaz repede i
coada poate fi amplasat aproape n orice loc, pe suprafata de operare, dup necesitate.
Dupa ridicarea greutii din magazie, cu ajutorul mandarului dublu, biga cu greutatea
se manevreaz n direcie cu ajutorul gaiurilor, apoi coada se coboar i se dispune pe locul
stabilit.
Metoda are avantajul mririi ctigului de for ( F = 12/20 Q fa de F = 11/10 Q al
mandarului simplu ) i dezavantajul reducerii vitezei de operare.
1.3.2. Metode de operare cu dou bigi cu palancurile cuplate:
Aceast metod mai poart denumirea de metoda de lucru n telefon i const n
deplasarea coadei de marf folosind simultan vinciurile i palancurile de sarcin ale celor
dou bigi aflate la captul unei guri de magazie, aezate n poziie fix att ca nclinare ct i
ca direcie; biga de magazie se fixeaz deasupra gurii de magazie i are rolul de a ridica sau
cobor din magazie; biga exterioar se fixeaz lateral, deasupra locului unde coboar sau
ridic greutatea.
Aceste metode au o variant prin utilizarea ca palanc de sarcin la fiecare big aunui mandar dublu n loc de unul simplu, ceea ce asigur un mare ctig de for. Macaraua
alunecatoare a fiecrui mandar dublu este prins cu o cheie de mpreunare a carligului de
ridicare comun. Fiecare big se fixeaz pe poziie prin manevrele curente proprii ( balansine
i contragaiuri ).
1.3.3. Metoda de operare cu dou bigi mobile cuplate:
11
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
14/63
O greutate mai mare dect capacitatea de ridicare a unei singure bigi poate fi ridicat
folosind dou bigi care lucreaz n cuplu ca o singur big mobil.
n acest caz, mandarul fiecreia din cele dou bigi se prinde la vertical, cu crligul
de ridicare, de capetele respective ale unei traverse de cuplare, care servete ca mijloc de
echilibrare a eforturilor pe vinciul de marf; greutatea de manevrat se controleaz la
mijlocul acestei traverse.
Cele doua bigi sunt aezate n poziia fixat pe timpul ridicrii i coborrii greutii,
folosind manevrele curente ( balansine, contragaiuri, palancuri de distanare ). Pentru
deplasarea coadei, spre exemplu de la magazie spre cheu, se ridic greutatea cu vinciurile
ambelor bigi, simultan; apoi, prin intermediul gaiurilor, ambele bigi sunt manevrate
simultan spre cheu i greutatea se coboar actionnd vinciurile.
Metoda este n general dificil, poate impune lsarea greutii pe punte spre a
schimba poziia bigilor i implic numeroase msuri de siguran. De aceea, se utilizeaz n
cazuri excepionale.
1.3.4. Metoda de operare cu dou perechi de bigi fixate la gura de magazie:
Multe nave sunt prevzute cu guri de magazie deservite de dou perechi de bigi
obinuite. Acestea pot opera cu una din metodele indicate sau dou perechi de bigi cuplate.
Cele 4 bigi se armeaz astfel:
- bigile prova si pupa se fixeaz ca nclinare i direcie ca n metoda de operare cu
palancuri cuplate ( telefon );
- apoi, mandarul bigii de magazie i respectiv al bigii exterioare din prova magaziei se
trec prin cte o macara alunectoare i se mbin printr-o cheie de mpreunare cu
mandarul bigii corespunzatoare din pupa magaziei;
- cele doua macarale alunectoare care unesc mandarele bigilor prova - pupa din
acelai bord se manevreaz aa nct cheile de mpreunare ale mandarelor s se naleaproape de capetele superioare ale macaralelor din pupa magaziei;
- dupa aceasta, cele dou macarale alunectoare se leag ntre ele cu chei de
mpreunare i cu lan, de care se prinde crligul de ridicare.
Sistemul astfel pregtit este acionat numai de vinciurile macaralelor din prova,
funcionnd pentru ncrcarea i descrcarea n sistemul bigilor cuplate ( telefon ) i putnd
manipula greuti ceva mai mici decat suma capacitilor de ridicare n siguran ale celor
dou mandare. Sistemul are avantajul c se pregtete repede, poate manevra greuti mari,
12
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
15/63
utilizeaz numai dou vinciuri i permite trecerea rapid la un alt sistem de lucru mai
simplu.
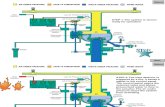
Figura nr. 1 BIGA DE MARF
Elemente componente:
1. biga propriu-zis
2. catargul (coloana bigii)
3. captul inferior al bigii
4. captul superior al bigii
5. articulaia pentru micarea bigii n nlime
13
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
16/63
6. articulaia pentru micarea bigii n direcie (bulon vertical)
7. palancul de balansin (balansina)
8. troliu de balansin (manevra bigii n nlime i fixarea la unghiul de nlime )
9. gai i contragai
10. palanc de gai i contragai
11. armtura captului superior al bigi
12. macaraua superioar a palancului de sarcin
13. cablu de sarcin
14. ganciul bigii (crligul palancului de sarcin)
15. pastica de ghidare a cablului de sarcin
16. vinci de sarcin
17. cablu de siguran
18. plac triunghiular
14
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
17/63
CAPITOLUL II
Stabilirea schemei cinematice. Descrierea diagramei de sarcin.
Alegerea sistemului de acionare se face pe considerente economice n aa fel nct
sistemul s fie simplu, robust la nivelul tehnicii actuale, economic i s satisfac toatecondiiile impuse.
Dimensionarea i alegerea elementelor componente din sistemul de acionare
electromecanic comport:
- dimensionarea i alegerea elementelor mecanice din schema cinematic;
- alegerea motorului electric de acionare; determinarea i alegerea aparatajului
electric de comand, de protecie, de msur, i a dispozitivelor de siguran;
- elementele mecanice din schema cinematic se calculeaz n msura n care
sunt necesare pentru a furniza datele cu privire la alegerea motorului electric i
sistemului de acionare electric.
2.1. Mecanismul de ridicare a sarcinii:
Mecanismul de prindere a sarcinii cuprinde dispozitivul de prindere, un lan de care
se fixeaz elementul de ghidare a cablului de traciune, tamburul pentru nfurarea
cablului, cuplajul dintre tambur i reductor, reductorul cu roi dinate cilindrice,
cuplajul dintre electromotor i reductor, electromotorul de acionare i frn
electomagnetic.
Elemente componente :
- Cablu de traciune;
- Roi de ghidare;
- Tambur;
- Cuplaj cu boluri;
15
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
18/63
- Reductor;
- Cuplaj dinat simplu;
- Motor electric;
- Frn electromagnetic.
2.2. Calculul transmisiei prin cablu:
La calculul transmisiei prin cablu se ine seama de urmtorii factori:
- Condiiile de funcionare;
- Solicitrile din cablu;
- Materialul cablului;
Condiiile de funcionare a transmisiei prin cablu sunt date conform STAS
466-79. Grupele de funcionare ale mecanismului de ridicat sunt stabilite n funcie de
3 factori:
- Clasa de utilizare;
- Starea de ncrcare (solicitare);
- Starea de funcionare.Clasa de utilizare caracterizeaz timpul de funcionare mediu Tz prevzut
pentru mecanismul respectiv exprimat in ore.
Timpul de utilizare mediu zilnic Tz pentru un mecanism se determin lund
n considerare urmtoarele elemente:
- Numrul de cicluri pe zi, Nz;
- Numrul de cicluri pe or pentru fiecare schimb, Nc1, Nc2, N3
- Timpul de funcionare al mecanismului respectiv ntr-un ciclu tm [ore];- Durata total a ciclului, tc[ore];
- Nc1 = Nc2 = Nc3= 12 [cicluri / ora]
NZ = 8( Nci + Nc2 + Nc3) = 8 * 24 = 336 [cicluri / zi]
tm = 96,869 [s] = 0,026 [ore]
tc = 256,865 [s] = 0,071 [ore]
TZ = tm * NZ = 0,026 * 336 = 8,864 [ore]
16
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
19/63
Pentru a alege Tz = 8,864 se alege clasa de utilizare T7 creia i corespunde o durat
de serviciu de 25 000 ore de utilizare intensiv.
Din tabeul II STAS 4662 - 79 alegem starea de funcionare 4 pentru condiiile
de funcionare cu solicitri inferioare.
2.3. Dispozitivul de prindere a sarcinii:Dispozitivul trebuie s permit o prindere rapid i sigur a sarcinii n
vederea realizrii unei mari productiviti i siguran n funcionare.
n acelai timp se urmrete ca greutatea proprie a dispozitivului s fie ct mai
mic fiind o sarcin inutil.
Conform STAS 4662 - 79 pentru grupa de funcionare M6 la sarcin nominal 3 tf
am ales modelul 11 al crligului, din tabela l0 cu clasa de rezisten S.
Din STAS 1944 - 81 corespunztor numrului de model am ales un crlig S 11 253 -
S unde notaiile au urmtoarele semnificaii:
- S, crlig forjat simplu brut;
- 11, numrul modelului;
- 253, lungimea crligului;
- S, clasa de rezisten a crligului.
2.4. Calculul de alegere a lanului:Se dimensioneaz diametrul zalei dz. Zala lanului este solicitat la ntindere,
ncovoiere i strivire.
Pentru uurarea calculelor se neglijeaz att efectul formei zalei ct i neterminarea sa
static interioar, amintind o repartiie uniform a formei de traciune pe seciunea
transversal a celor dou poriuni rectilinii ale zalei.
Se alege un lan calibrat obinuit la sarcina de 3 tf, conform STAS 7951 - 80 tip NS cu
dz= 22 mm, pasul p = 61 mm, limea zalei b = 67 mm.
Lanul este de tip NS 22 STAS 7951 - 80.
- Sarcina la deformare, 60 000 [N]
- Sarcina de rupere este de 160 000[N]
- Masa pe metru liniar, 8,2 (Kg / m]
- Lanul are 4 zale
2.5. Calculul cablului de traciune:
17
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
20/63
Legtura cinematic ntre crligul de agare a sarcinii i tamburul de sarcin se
asigur prin intermediul cablului de traciune.
Se folosesc cabluri de oel rotunde compuse, executate din srm de oel mat cu sens
de nfaurare Z / S fiind indicate n STAS 1689 - 80. Solicitrile de rezisten la care sunt
supuse cablurile sunt:
- Solicitarea de ntindere la ridicarea sarcinii;
- Solicitarea de ncovoiere la nfurarea pe tambur;
- Solicitarea de tensiune datorat nfurrii pe elice;
- Solicitarea suplimentar datorit frecrii firelor unul de celalalt i care se consider
n calcule ca fiind un coeficient luat n calcule de solicitarea de ncovoiere.
Cablul se alege pe baza solicitrii de ntindere. Se calculeaz o sarcin teoretic de
rupere la solicitarea de ntindere.
Ftn =88
cF=> Ftn =
88
81,9)605000(5,4 += 2538,33[Kgf]
c = 4,5 coeficient de siguran la traciune pe tambur.
Pentru Ftn = 2538,33 Kgf se alege cablul SIL - 22 - 6 19 - 1760 Z / S conform STAS 1689-
80, unde notaiile au urmtoarele semnificaii:
- 22, diametrul in milimetri;
- 6, numrul de toroane;
- 19, numrul de fire;
- Z / S, numrul de nfurare a firelor n toroane i al toroanelor n funie.
2.6. Determinarea elementelor principale ale tobei:n funcie de diametrul ales pentru transmisia prin cablu, diametrul de nfaurare al
cablului pe tambur se determin n conformitate cu cele prezentate la paragraful anterior.
Toba este de construcie simpl, cu un cant elicoidal pe suprafaa cilindric, n care senfoar cablul de oel.
Profilul canalelor n funcie de diametrul cablului ales se determin dup STAS 6979
-72.
Dimensiunile canalelor sunt urmtoarele:
- Diametrul nom. cablu D = 22 mm;
- Raza = 12mm.;
- Pasul p = 24mm.;
18
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
21/63
- nlimea h = 7 mm.
Lungimea prii canelate se determin astfel pentru tamburul pe care se nfoar o
singur ramur de cablu:
L =
+++
21)( *nn
dDiHi
*p
- H = nlimea de ridicare, H = 18mm.
- i = raportul de transmisie al mec. i = 1.
- D = diametrul tamburului, Dt = 0,45 m
- n1 = numrul de spire de siguran n = 2, n = 3
- n2 = numrul de spire necesar pentru prinderea cablului pe tambur n2 = 2-4 spire
- p = pasul, p = 0,024
L =
++
+33
)022,045,0(
1*20
*0,024 = 0,467[m]
Unghiul de nclinare al anului elicoidal este dat de relaia:
tg =054,0*
024,0*
* Dr
p= 0,014
= 045'
Tamburul se execut: construcie turnat din oel sau construcie sudat din tabl O.L.
Tabla este supus la o presiune exterioar uniform distribuit. Grosimea peretelui
tobei ce se execut se determin pe baza solicitrilor la compresiune transversal, deoarece la
tobele de dimensiuni obinuite eforturile unitare datorate solicitrii la tensiune i ncovoiere
sunt foarte mici n raport cu prima solicitare.
Grosimea peretelui se determin cu relaia:
b = 0,02* D (6 ...10) mm
b = 0,02* 640(6... 10) =18,8mm
Se alege dimensiunea STAS b = 20 mm.
2.7. Alegerea cuplajului:
Cuplajul se alege n funcie de efortul la care este supus pe durata solicitrii precum i
de natura acestuia.
innd seama de acestea, am folosit un cuplaj dinat STAS 6589 - 74. Aceste cuplaje
permit deplasri radiale mici, unghiulare i axiale.
19
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
22/63
Deplasrile axiale sunt de 28 mm.
Ca element de baz la alegerea cuplajului se consider valoarea momentului rezistent
transmis.
Forma, dimensiunile, parametrii principali, materialele i indicaiile pentru alegerea
cuplajului se gsesc in STAS 6589 - 74.
Am ales cuplajul dinat tip 3 model IPTCM cu momentul maxim de transmisie 3150
[Nm].
2.8. Reductorul:
Reductoarele folosite la mainile de ridicat sunt de construcie special, din cauza
condiiilor de funcionare caracterizate printr-un numr mare de accelerri i frnri a
corpurilor n micare i din cauza condiiilor de montare specifice ntr-un spaiu ct mai redus,
pe prile mobile ale macaralelor supuse la ocuri mecanice.
Reductorul se alege cunoscnd puterea pe care trebuie s o transmit precum i
regimul de funcionare.
PS =t
NN VqQ
*)( +[Kw]
n cazul macaralei puterea de transmisie se determin cu relaia:
- (QN+q) = greutatea de ridicat in [KN];
- VN = viteza de ridicare in [m / s];
- t = Randamentul total al mecanismului.
Pentru un troliu in trei trepte cilindrice randamentul va fi:
= 3red* tambur* cuplaj = 0,933 * 0,96 * 0,86 = 0,76
PS[3tf] = ][14,3660*76,0
55*]81,9*)055,03[(Kw=
+
Conform STAS 6850 - 69 am ales un reductor cilindric cu seria 3H 1 - 001 cu
urmtoarel caracteristici:- At = 610 mm, distana dintre arborele de intrare i cel de ieire;
- A1 = 160 mm, distana dintre primul i al doilea arbore;
- A2 =200mm, distana dintre al doilea arbore i al treilea arbore
- A3 = 250 mm, distana dintre al treilea i ultimul arbore;
- Lmax = 1031 mm, lungimea total a reductorului.
Reductorul este cu cumulare de vitez pe treapta a doua.
20
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
23/63
2.9. Rolele de egalizare i ghidare:
Rolele pentru cablul de oel se execut prin turnare din font sau
oel.De asemenea se mai pot confeciona prin sudare din platband de oel.
La aceste role se deosebesc urmtoarele elemente:
a) obada care are la periferie un an corespunztor cablului
b) butucul rolei care se rotete liber pe un ax fix
c) discul circular de legtur
Raportul minim dintre diametrul de ghidare i conducere a cablului n funcie de
unghiul de nfurare trebuie s corespund relaiilor:
D/d = 25 pentru = 5 10
D = 25mm, d = 22mm D = 25*22 = 550mm
CAPITOLUL III
Alegerea motorului electric de acionare pentru mecanismul deridicare.
3.1. Alegerea preliminar a motorului electric:
- Cuplul static la arborele motorului electric la ridicarea sacinii nominale:M1[
3tf] = ][5,25376,0*35*2
45,0*)553000(*81,9
**2
*)(*Nm
i
DqQg T =+
=+
- Cuplul static la arborele motorului la coborrea sarcinii nominale:
M2[3tf] = ][97,131)76,0
12(*
35*2
45,0*)553000(*81,9)
12(*
*2
*)(*Nm
i
DqQg T =+
=+
- Turaia motorului electric pe treapta de turaie ridicat necesar pentru asigurareavitezei impuse de ridicarea sarcinii nominale:
n = min]/[35,136245,0*
35*55
*
*rot
D
iV
T
N ==
- Turaia motorului electric pe treapta de turaie cobort necesar pentru asigurarea
vitezei impuse de aezarea sarcinii nominale:
21
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
24/63
na = min]/[16,19845,0*
35*8
*
*rot
D
iV
T
a ==
- Calculul puterii la ridicarea sarcinii nominale pe treapta de turaie ridicat:
P1[Kw] = ][16,369550
35,1362*5,253
9550
*1 KwnM
==
- Calculul puterii la coborrea sarcinii nominale pe treapta de turaie cobort:
P2 = ][74,29550
16,198*97,131
9550
*2Kw
nMa
==
3.2. Alegerea motorului electric:
Se alege un motor electric de tip MAP 6126/12/24 cu trei trepte de turaie, cu
rotor n scurtcircuit avnd trei nfurri statorice distincte n conexiuni stea,
parametrii fiind indicai n urmtorul tabel:
Parametrii motorului electric Treapta I Treapta II Treapta I I INumrul de poli 24 12 16Puterea nominal PN[ Kw] 5 16 32Turaia nominal [rot / min] 200 425 910Curentul nominal IN [A] 51 59 70Curentul de pornire Ip[A] 75 150 340Cuplul critic Mk [Nm] 600 700 850Cuplul de pornire Mp[Nm] 600 680 730Randamentul nominal N [%] 34 66 79Factorul de putere cos 0,44 0,62 0,88Durata relativ de acionare DA[%] 15 25 40Momentul de volant GD* [Nmz] 70 70 70Tensiunea nominal Un[V] 380 380 380Conexiuni statorice
Gradul de protec ie IP56
TABELUL NR.1 : Parametrii motorului electric
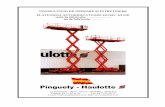
3.3. Caracteristicile mecanice n = f (M):
Se calculeaz cuplul nominal al motorului pentru treapta a III-a de turaie i
se compar cu momentul static M1.
22
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
25/63
MN = 9550* ][82,335910
32*9550 Nm
P
N
N ==
Trebuie ndeplinit condiia:
MN > Mi
335,82[Nm] > 253, 5[Nm], deci condiia este ndeplinit.
Alunecarea nominal:
Sn =o
No
n
nn unde n0 = turaia de sincronism
n0 = min]/[10003
50*60*60rot
p
f== unde
p = numrul de perechi de poli: p=3
SN = 09,01000
9101000 =
Alunecarea critic:
SK= SN 43,0)153,253,2(*09,0)1( 22 =+=+ MM
53,282,335
850===
N
K
MM
M
Expresia analitic a caracteristicii mecanice naturale a motorului electric asincron
este de forma: MS
S
S
SM
K
K
K
+= 2
, unde
- M = cuplul dezvoltat de motor la arbore;
- MK= cuplul critic al motorului electric;
- S = alunecarea corespunztoare cuplului M;
- SK= alunecarea critic a motorului electric.
n1 = n0 (1-S); S = 0; M = 0; n = n0 (1-S) = 1000[rot/min]
Pentru S = SN = 0,09 se calculeaz cuplul motorului M:
M =][88,340
09,0
43,0
43,0
09,0850*22
Nm
S
S
S
S
M
K
K
K =
+
=
+
n = n0 (1-S) = 1000 (1-0,09) = 910[rot/min].
Pentru S = 0,5 => n = 1000 (1-0,5) = 500[rot/min]
23
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
26/63
M =][42,840
5,0
43,0
43,0
5,0850*2
Nm=
+
Pentru S = 0,8 => n = 1000 (1-0,8) = 200[rot/min]
M=][93,708
8,0
43,0
43,0
8,0850*2 Nm=+
Datele obinute sunt prezentate centralizat n tabel.
Se traseaz caracteristica mecanic natural.
Pentru treapta a II-a de turaie se obin urmtoarele caracteristici:
MN = 9550*][59,359
425
16*9550 Nm
P
N
N ==
n0 = min]/[5006
50*60*60rot
p
f==
94,152,359
700===
N
K
MM
M
SK= SN2 54,0)194,194,1(15,0)1( 2 =+=+ MM
SN2 = 15,0500
425500
0
0 =
=
n
nn N
Folosind relaiile:
M =S
S
S
S
M
K
K
K
+
2
si n = n0 (1-S), rezult tabelul nr. 3 i caracteristica natural mecanic 2.
Pentru treapta I de turaie:
MN = 9550* ][75,238200
5*9550 Nm
P
N
N ==
SN1 =0
0
n
nn N
- Turaia de sincronism: n0= (60 * f) / p = (60 * 50) / 12 = 250[rot/min]
- Alunecarea nominal : SN1 = 2,0250
200250
0
0 =
=
n
nn N
- Coeficientul de suprasarcin sau supraincrcare 1N :
51,275,238/600/1 === NKiN MM
- Alunecarea critic:
24
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
27/63
SK= SN2 96,0)151,251,2(2,0)1( 2121 =+=+ NN
M =S
S
S
S
M
K
K
K
+
2
si n = n0 (1-S), rezult tabelul 4 i caracteristica mecanic natural pentru
treapta I de vitez.
TABELUL NR.2: caracteristica mecanic natural pentru treapta a III-a de turaie
S [%] 0 910 10 20 43 50 60 70 80 90 100
n ro t/m in 1000 910 900 800 570 500 400 300 200 100 0
M [N m ] 0 340 375 650 850 840,4 804,9 758,1 708,9 661,2 616,9
TABELUL NR. 3: caracteristica mecanic natural pentru treapta a II-a de turaie
S [%] 0 10 15 20 30 40 54 60 70 80 90 100
n rot/m in 500 450 425 400 350 300 230 200 150 100 50 0
M [N m ] 0 250,6 359,5 455,9 594,4 669,6 700 696,1 667 649 ,8 617 ,.8 585
TABELUL NR. 4: caracteristica mecanic natural pentru treapta a I-a de turaieS [%] 0 10 20 30 40 50 60 70 80 96 100
n rot /m in 250 225 200 175 150 125 100 75 50 10 0
M [N m ] 0 123,6 238,7 341,6 426 491,8 540,5 571,2 590,2 600 599,.7
25
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
28/63
Figura nr. 2 Caracteristicile mecanice n = f (M)
26
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
29/63
CAPITOLUL IV
Calculul diagramei de sarcin pentru mecanismul de ridicare-
coborre
4.1. Ridicarea sarcinii nominale:
Momentul de volant echivalent raportat la arborele motorului electric se obine
folosind relaia:
Jm= ][)(22 Nms
Vm
n
n
Jm
+ , unde:
Jm - momentul de inerie al rotorului motorului;
n - viteza unghiular nominal [rad/s];
Vn - viteza liniar a corpului n micare de translaie [m/s];
- coeficientul a crui valoare depinde de i (raportul de transmisie al
reductorului);
m - masa corpului.
Pentru mecanisme cu i > 25, = 1,1 la 1,3; alegem
= 1,2 - cuplul dinamic de accelerare:M1p = Mp - M1 = 326,498 [Nm]
- timpul de accelerare (pornire):
t1a = (GDe / 375)(n1 / M1d), unde:
GDe = GDM +4g(QN+q)(VN/2nN)2 =88,858[Nm2]
GDe= momentul de volant echivalent
t l a = (n1*GDe)/ (375*M1d) = 1,045 [s]
n1 = 1440 se citete din caracteristica mecanic natural pentru M1 = 233,4[Nm]- pierderile constante ale motorului:
PK=
2
]1)1
[( N
NP = 2,444[Kw]
- cuplul de frnare determinat de pierderile constante ale motorului:
MfM = 9550 (PK / n1), MfM = 16,211
[Nm]
27
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
30/63
- cuplul de frnare rezistent total:
M1f=M1 + M f+MfM
M1f = 719,713 [Nm]
Mf = momentul de frnare introdus la aciunea frnei electromagnetice de tip TMT - 62
- timpul de frnare la ridicarea sarcinii nominale n cazul decuplrii motorului de la
reea:
t1f = (GDe / 375)*(n1 / M1f) = 0,474 [s]
- viteza de regim staionar la ridicarea sarcinii
nominale: V1 = ( DT n1) / i = 58,164 [m / min]
- nalimea parcurs de sarcin la pornire i
frnare: H1 = V1(t1a+t1f)/2*60 = 0,736[m]
- timpul de ridicare a sarcinii n regim
staionar:
t1S = (H-H1)*60/V1 = 19,872[s]
- curentul absorbit de motor:
I1 = I 1 N * (M1 / MN) = 64,703 [A]
4.2. Coborrea cu frnare a sarcinii nominale:
Considerm maina funcionnd pe poriunea liniar a caracteristicilor statice
naturale n = f (M), valabil n cazul sarcinilor aflate in limitele admise de puterea
motorului, turaia de la care ncepe frnarea cu recuperare de energie va fi:
ne = n2 = n0 + (n0-nS)
Deci:
n2 = 2 n0 - nS = 2* 1500 - 1485 = 1515 [rot/min]ns = 1485 [rot / min] se obine din caracteristica mecanic natural corespunztoare
cuplului M = 131,821 [Nm]
- curentul debitat de main n regim de frnare cu recuperare de energie
corespunztor cuplului M va fi:
I2 = I 1 N * (M2 / MN) = 33,645 [A]
28
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
31/63
- timpul de accelerare de la turaia no = 0 la n = n 2 la coborrea sarcinii
nominale n regim de frnare cu recuperare de energie este:
t2a = (GDe / 375 )* (n2/ (Mp+ M2) unde:
n2 = turaia de la care ncepe frnarea
Mp = cuplul de pornire
GDe = momentul de volant echivalent
M2 = cuplul static la axul motoruiui la coborrea sarcinii
nominale t2a = 0,504 [s]
- cuplul de frnare la coborrea sarcinii cu maina decuplat de la
reea:
M2f= Mf+ MfM - M2, unde:
M2f = cuplul rezistent introdus prin frna electromagnetic
MfM = cuplul de frnare determinat de pierderile constante din motor
M2f= 334,39 [Nm]
- timpul de frnare la coborrea sarcinii cu maina decuplat de la
reea:
t2f= (GDe/ 375) * (n2 / M2f) = 1,074 [s]
- viteza de coborre a sarcinii nominale:
V2 = (3,14* DT * n2) / i, unde:
n2= turaia la care incepe frnarea
DT = diametrul tamburului
i = raportul de transmisie
V2 = (n* 0,64 * 1064) / 40 = 61,163 [m / min]
- nlimea parcurs de sarcin la acceleraie i frnare:
H2 = V2*(t2a+t2f)*0,5/60 unde:
t2a = timpul de accelerare n = 0 la n = n2
t2f= timpul de coborre a sarcinii cu maina decuplat de la reea
V2 = viteza de coborre a sarcinii
H2 = 0,804 [m]
- timpul de coborre a sarcinii n regim staionar:
t2S= (H - H2)*60/V2 = 18,831 [s]
H = nlimea de ridicare impus
29
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
32/63
4.3. Ridicarea crligului gol:
- Cuplul de sarcin la axul motorului:
M3 = (g*q*DT)/(2*i* 0 )unde:
q = sarcina crligului golg = acceleraia gravitaional
0 = coeficient; 0 = 0,14
M3 = 24,775 [Nm]. Pentru cuplul M3 din n = f (M) => n3 = 1495 [rot / min]
- momentul de volant echivalent raportat la arborele motorului electric:
GDeo = GDm, unde:
=1,1 1,3
GDm= momentul de volant al motoruluiGDm=l,2*70 = 84[Nm2]
- cuplul dinamic de accelerare:
M3d = Mp -, unde:
Mp = cuplul de pornire
M3= cuplul de sarcin la axul motorului la ridicarea crligului
M3d = 555,225 [Nm]
- timpul de accelerare la ridicarea crligului gol:t3a = (GDe0/375 ) * (n3/ M3d) = 0,603 [s]
- cuplul de frnare:
M3f= M3 + Mf+ MfM, unde:
Mf = cuplul rezistent introdus de frn
MfM = cuplul de frnare determinat de pierderile constante de motor
M3 = cuplul de sarcin la axul motorului
M3f = 490,986 [Nm]
- timpul de frnare la ridicarea crligului gol:
t3f= (GDeo / 375 ) * (n3 / M3f), unde:
M3f= cuplul de frnare total
GDeo = momentul de volant echivalent
t3f= 0,682 [s]
- viteza de ridicare a crligului:
V3 = (3,14* DT * n3) / i
30
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
33/63
V3= (71*0,45*1495) / 35 = 61,163 [m/min]
- nalimea parcurs de crligul gol la accelerare i frnare:
H3 = V3*(t3a + t3f) / 2*60 = 0,647 [m]
- timpul de ridicare a crligului gol n regim staionar:
t3S= (H - H3)*60 / V= 19,23 [s]
- curentul absorbit de motor la ridicarea crligului gol:
I3 = IN
2
3
2
)(1
)(1
S
S
S
S
K
N
K
+
+
=> I3 = 2,403[A], unde:
- SK= alunecarea critic
- S3 = alunecarea corespunzatoare cuplului de sarcin
S3 = (n0 - n3) / n0 = 0,003
M3 = 24,775[Nm]
La sarcini mici nu mai poate fi admis proporionalitatea dintre curent i cuplu.
4.4. Coborrea in for a crligului gol- cuplul de sarcin la arborele motorului electric
M4 =
i
Dq T
*2
)12(***81,90
=> M4 = 17,838[Nm]
0 = coeficientul calculat la paragraful anterior
Cuplului de sarcina M4 i corespunde turaia n4 = 1496 [rot/min] din caracteristica
mecanic natural n = f (M).
- cuplul dinamic de accelerare:
M4d = MP - M4, unde: M4 = cuplul de pornire
M4d = 562,162 [Nm]
Semnul minus indic necesitatea coborrii n for a crligului gol.
- timpul de accelerare la coborrea crligului gol:
t4a = (GDeo / 375) * (n 4 / M4d)
t4a = 0,596 [s]
- cuplul de frnare total:
M4f = M4+M fM +M f
31
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
34/63
M4f= 484,05 [Nm]
- timpul de frnare la coborrea crligului gol n cazul deconectrii motorului de la
reea:
t4f=(GDeo/375)*(n4/M4f)
t4f = 0,692 [s]
- viteza de coborre a crligului gol:
V4=(* DT* n4)/ i
V4= (3,14*0,45*1496)/35 = 60,396[m/min]
- nlimea parcursa de crligul gol la accelerare i frnare:
H4 = V4*(t4a+t4f) = 60,496*60*(0,596 + 0,692) = 0,648 [m]
- timpul de coborre a crligului gol n regim staionar:
t4S = (H -H4)*60 = 19,225 [s]
- curentul absorbit de motor la ridicarea crligului gol:
I4 = I1N2
4
2
)(1
)(1
S
S
S
S
K
N
K
+
+
= 1,922[A]
S4 = alunecarea corespunztoare a cuplului M4, S4 = 0,002.
Centralizm datele n tabelul urmtor:TABELUL Nr. 5 Regimul de lucru
32
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
35/63
4.5. Verificarea motorului ales din punct de vedere al productivitii:
- durata unui ciclu:
t1 = t1 a + t1s + t l f = 21,391 [s]
t2 = t2a + t2s + t2f= 20,409 [s]
t3 = t3a + t3s + t3f= 20,515 [s]
t4 = t4a + t4s + t4f= 20,513 [s]
A = t1 + t2 + t3 + t4 = 82,827 [s]
Folosind datele din tabel se obine:
B = to1 + to2 + to3 + to4 = 160[s]
tC = A + B = 242,827
- numrul de cicluri ntr-o or:
ZC = 3600/ tC = 3600/242,827 = 14,825 [cicluri / h]
ZC > Z, Z = 12[cicluri/h]
33
REGIM DE LUCRU CURENT (A) TIMP (s)Ridicarea sarcinii nominale
Accelerare IP = 410 t1a=1,045Regim staionar I1 =64,703 t1S=19,872Frnare - t1 f =0,474
Deplasarea pe orizontal a sarcinii - to1 = 20Coborrea cu frnare a sarcinii nominale
Accelerare IP = 410 t2a = 0,504 Regim staionar I2 = 33,645 t2 S= 1 8 , 8 3 1Frnare - t2 f = 1 ,074Eliberarea crligului - to2 = 60
Ridicarea crligului golAccelerare IP = 410 t3a = 0,603Regim staionar I3=2,403 t3 S= 1 9 , 2 3Frnare - t3 f= 0 , 6 8 2
Deplasarea pe orizontal a crligului gol - to3 = 20Coborrea forat a crligului gol
Accelerare IP = 410 t4a= 0,596Regim staionar I4 = 1.922 t4S = 19,225Frnare - t4f=0.692Agarea sarcinii la crlig - to4 = 60
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
36/63
Deci motorul corespunde din punct de vedere al productivitii.
4.6. Verificarea motorului electric la nclzire:
- durata relativ de acionare real:
DAr=C
ffff
t
ttttA 100*)]([ 4321 +++=> DAr= 32,906[%]
- calculul curentului echivalent:
Ie=
SSSSaaaa
Sa
P
Sa
P
Sa
P
Sa
P
tttttttt
tItII
tItII
tItII
tItII
43214321
4
2
44
24
3
2
33
23
2
2
22
22
1
2
11
21
)(*
**)2
(**)2
(**)2
(**)2
(
+++++++
+
+
++
+
++
+
++
+
Ie = 55,21[A]
- calculul curentului nominal conectat corespunztor duratei reale de funcionare:
INC =1
**r
n
NSDA
DAI ; unde: 93,0= ; DAn = 0,4; DAr1 = 0,35; INS = 70[A] =>
=> INC = 69,595[A]
Se verific relaia :
Ie = 55,21[A] < INC = 69,595[A]
CAPITOLUL V
Calculul regimului tranzitoriu electromecanic
Pentru a regla n mod riguros timpii de acionare ai proteciilor este necesar
s determinm timpii regimului tranzitoriu de pornire i oprire ai sistemului de acionare
electric. n acest scop este necesar s determinam momentul de volant al motoruiui electric
GD2ME = 70 [Nm2] dat n caracteristicile motorului.
5.1. Determinarea momentului de volant al sistemului de acionare electric al
mecanismului de ridicare - coborre crlig:
Acionrile navale au un moment de volant de:
GD2Mact = (2 5) GD2ME
34
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
37/63
GD2Mact = 3*70 = 210 [Nm2]
5.2. Determinarea constantei de timp pentru cele trei trepte de vitez:
Treapta I
Tact = ][233,0600
250*
375
210*
3751
2
SM
nGD
KI
oact ==
n0 = turaia de sincronism pe treapta I
MKI= cuplu maxim pe treapta I al motorului, no = 250 [rot / min] ; MKI = 600 [Nm]
Treapta II
Tact = ][4,0700
500*375
210*375
0
2
SM
nGD
KII
IIact
==
n0II = turaia de sincronism pe treapta II
MKII = cuplul maxim pe treapta a II-a al motorului
noII = 500 [rot/min]; MKII = 700 [Nm]
Treapta III
Tact = ][65,0850
1000*
375
210*
375
2
SM
nGD
KIII
oIIIact ==
noIII = turaia de sincronism pe treapta III
MKIII = cuplul maxim pe treapta a III-a al motorului
noIII = 1000 [rot/min]; MKIII = 850 [Nm]
5.3. Determinarea timpilor de pornire:
TP = )1
2
1(*
2
2
N
K
K
Nact
SS
S
ST+
Treapta I
TPI = ][23,0)2,0
196,0
96,0*2
2,01(*
2
233,0 2S=+
Treapta II
TPII = ][38,0)09,0
143,0
43,0*2
09,01(*
2
4,0 2S=+
Treapta III
35
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
38/63
TPIII = ][71,0)09,0
143,0
43,0*2
09,01(*
2
65,0 2S=+
5.4. Calculul timpilor de frnare:
Tf= )*345,075,0
(2 KK
act SS
T+
Treapta I
Tf1 = ][12,0)96,0*345,096,0
75,0(
2
233,0S=+
Treapta II
Tf2 = ][31,0)54,0*345,054,0 75,0(24,0S=+
Treapta III
Tf3 = ][61,0)43,0*345,043,0
75,0(
2
65,0S=+
CAPITOLUL VI
Stabilirea schemei electrice a sistemului de acionare a instalaiei de
ridicare coborre sarcin
6.1. Date tehnice:
Echipamentul este destinat unui vinci de marf prevzut cu motor cu trei trepte de
vitez avnd bobinaje pentru fiecare treapt de vitez.
Instalaia electric de for a macaralei se alimenteaz cu curent alternativ 380 V / 50 Hz.
36
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
39/63
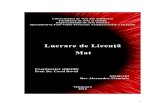
Am ales schema de acionare electric prezentat n figura nr.l, schem ce
asigur urmtorul algoritm funcional:
a) pornirea motorului : pe treapta I,II,III;
b) pornirea motorului pe treapta a III-a de vitez cu trecere ulterioar pe
treapta I s i a II-a de vitez la trecerea controlerului brusc din poziia "0" in poziia III-
a;
c) reversibilitatea motorului electric de acionare m;
d) frnarea mecanic cu ajutorul frnei electomagnetice;
e) frnarea electric (frnarea suprasincron sau cu recuperare de energie);
f) proteciile motorului electric de acionare:
- protecia de scurtcircuit a circuitului de for realizat cu ntreruptor automat T.P.D.
- protecia la suprasarcin a motorului electric realizat cu releele termice 1et,2et,3et .
6.2. Elementele componente ale schemei:
m - motor electric de acionare;
A ntreruptor automat;
B1,B2 limitatoare de sarcin;
B3 limitator;
C1,C2 contactoare de sens;
C3,C4,C5 contactoare pentru treapta de vitez mic,medie, mare;
C6 contactor de frn;
D punte redresoare;
D1 redresor;
F frn electric;
K0 K14 - contactele controlerului de comand;
R1,R2 rezistene de limitare;
R3 rezisten reglabil de limitare a curentului prin bobina frnei F;
R4 R11 rezistene la ncalzire;
RC grup protecie punte redresoare;
R12,C1 grup protecie diode n1;
d1,d2 relee temporizate de accelerare;
d3 releu temporizat intermediar;
37
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
40/63
d4 releu temporizat de tensiune mic;
d5,d6 relee temporizate de frnare;
d7 releu temporizat de accelerare n treapta a III-a de turaie;
d8 releu de curent ale crui contacte unteaz rezistena de limitare a bobinei frnei in
perioada de eliberare a frnei;
et1, et2 , et3, et4, et5 relee termice;
6.3. Principiul de funcionare al schemei:
Se cupleaz ntreruptorul automat din T.P.D.
Controlerul fiind in poziia "0" contactele Controlerul se afl pe poziia 0:
contactele controlerului K3 [1], K7 [6], K8 [7], K14 [16] sunt nchise. n acest moment
schema de comand n c.a. nu este alimentat. Prin punea redresoarelor n se alimenteaz
in c.c. partea de comand cu relee. Sunt alimentate bobinele releelor: d2 care i nchide
contactul din linia [6] i l deschide pe cel din linia [8]; d1 care i deschide contactul din
linia [9] i il nchide pe cel din linia [8]; d3 i deschide contactul din linia [5] i l nchide
pe cel din linia [17], [12-13]; d4 i nchide contactul din linia [2] untnd contactul
controlerului K3; d7 i inchide contactul din linia [17], [10-9], permind alimentarea
releului d4 i i deschide contactul din linia [10].
Se comut controlerul pe poziia 1 (VIRA): n acest caz se nchid contactele
controlerului K7 [6], K8 [7], K14 [16]; odat cu nchiderea acestor contacte K6 [3], B1 ,
C2 , [3] se alimenteaz bobina contactorului de sens (VIRA) C1 [3]; contactorul C1 i
nchide contactele din liniile [9-10], [3] i i deschide contactele din linia [4] (contact de
interblocare) i din linia [13] ntrerupnd alimentarea bobinei releului d1; releul d1 i
nchide temporizat contactul din linia [9], i l deschide pe cel din linia [7]; este pus sub
tensiune bobina contactorului de frn C6 care alimenteaz bobina frnei
electromagnetice, care alimenteaz elibernd n acelai moment frna i i deschidecontactele din linia [14] i [17].
Bobina releului d3 i pierde alimentarea i contactul din linia [5] revine la poziia
iniial cu temporizare, contactul din linia [17], [13-12] se deschide tot cu temporizare.
Bobina releului d7 i pierde alimentarea dar nu i modific poziia
contactelor deoarece C3 primete alimentarea i i nchide contactul din linia [18], releul
primind din nou alimentare.
Contactorul C3 este alimentat prin contactele K6, C1 [3], d3 [5], d2, K7 [6], d6,
38
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
41/63
C4 , C5 [7].Contactorul C3 i nchide contactul [18], i deschide contactele [14], [8] din
circuitul de comand i i nchide contactele din circuitul de for, motorul pornind pe
treapta I-a de vitez. Releul d4 i pstreaz alimentarea prin C3 [18], d7 , d5 , K14
[16].
La trecerea de pe poziia 1-2 sunt nchise contactele controlerului K7 [6], K10
[9], care pregtesc funcionarea pe treapta a II-a.
Se comut controlerul pe poziia 2 (VIRA).
Se nchid contactele controlerului K6 [3], K13 [5], K8 [7], K10 [9], K14
[16]. Bobina contactorului C3 i pierde alimentarea, contactul din linia [8] revine la
poziia iniial i contactorul C4 primete alimentare prin d1 , K10 [9], C3 [8], motorul
trece pe cea de a II-a treapt de turaie prin nchiderea contactului contactorului C4 din
circuitul de for.
Contactorul C4 i nchide contactul de pe linia [18] alimentnd releul d5 care
i nchide contactul de pe linia [18-17] realiznd alimentarea bobinei releului d4 n
continuare.
Releul d3 i nchide contactul ntre bornele [13-15] din linia [5-4] i contactul de
pe linia [10].
Releul d7 la trecerea pe cea de-a doua treapt de turaie i pierde
alimentarea i i deschide contactul de pe linia [17], [10-9], i i nchide contactul
de pe linia [10] pregtind astfel alimentarea bobinei contactorului C5.
La trecerea de pe poziia 2-3 a controlerului sunt nchise contactele K10 [9],
K12[11] care realizeaz aceasta trecere intermediar.
Se comut controlerul pe poziia 3 (VIRA).
Se nchid contactele controlerului: K6 [3], K13 [5], K8 [7], K12 [11]. Bobina
contactorului C4 i pierde alimentarea i astfel bobina contactorului C5 primete
alimentare prin d1 [9], C4 [9-11], K12 [11], d7 ,d5 , C4 [10], C3 [8]. Contactorul C4
i deschide contactele [5], [18,] i nchide contactul [7], [10] i i nchide contactele de
for.
Contactorul C5 i nchide contactul [19] alimentnd releul d6 care i nchide
contactul din linia [18-19] care pstreaz alimentarea releului d5 i contactele din
circuitul de for se nchid pe treapta a III-a de turaie.
La trecerea lent a controlerului de pe poziia 3 pe poziia 0 procesul se
deruleaz n ordine invers.
39
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
42/63
Trecerea brusc a controlerului de pe poziia 0 pe poziia 3.
Controlerul se afl pe poziia 0 (VIRA)
Sunt alimentate releele d1, d2, d3, d4, d7 care i modifica poziia
contactelor.
Se trece brusc controlerul pe poziia 3 (VIRA).
Se nchid contactele controlerului: K6 [3], K13 [5], K8 [7], K12 [11], K14 [16].
Prin K6, B1, C2 [3] se alimenteaz bobina contactorului de sens C1 (VIRA). Acest
contactor i nchide contactele din liniile [3],[9-11]. Prin C1 [3], K13 [5] se
alimenteaz bobina contactorului de frn C6 care i deschide contactul [14] scond de
sub tensiune releul d3 care i nchide cu temporizare contactul din linia [5]. Bobina
releului d1 i pierde alimentarea prin deschiderea contactului C1 [13].
n acest moment este alimentat contactorul C4 prin: d1 [9], C1 [9-11], K12 [11],
d7 [9-10], C5, C3 [8], motorul este pornit direct pe treapta a II-a de turaie. Bobina
releul d7 i pierde alimentarea odat cu deschiderea contactului C6 [17]. Diferena
dintre temporizrile celor dou relee o constituie timpul de funcionare pe treapta a
II-a. Prin nchiderea contactului C4 [18], se alimenteaz bobina releului d5 care i
nchide contactele d5 [10], [17-18], [5-4] i deschide d5 [17].
Dup terminarea temporizrii bobina releului d7 i pierde alimentarea, se deschide
contactul d7 [10-9] i se nchide d7 [10] i alimenteaz bobina contactorului C5.
Prin nchiderea lui C5 [19] se alimenteaz releul d6 care i nchide contactul d6
[19-18] meninnd bobina releului d5 sub tensiune.
Motorul funcioneaz pe treapta a III-a de turaie.
Trecerea brusc a controlerului de pe poziia 3 pe poziia 0 (VIRA)
(frnare suprasincron).
Motorul funcioneaz pe poziia 3 (VIRA). Se nchid contactele
controlerului: K3 [1], K7 [6] si K8 [7].
Bobina contactorului de sens C1 i pierde alimentarea i contactele sale revin
la poziia iniial. Alimentarea schemei de comand n curent alternativ se pstreaz
prin contactul releului d5 [5-4]. Bobina releului d1 se alimenteaz i i nchide
contactul de pe linia [7]. Bobina contactorului C5 i pierde alimentarea i contactele
sale revin la poziia iniial, dup care prin deschiderea contactului C5 [19] bobina
releului d6 i pierde alimentarea dar contactele i pstreaz poziia pn la
terminarea temporizrii. n acest moment dup revenirea contactelor contactorului C5 se
40
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
43/63
alimenteaz bobina contactorului C4 prin: d2 , K7 [6], d6 [8-7], C5 [8]. Motorul
funcioneaz pe treapta a II-a cat timp releul d6 realizeaz temporizarea. Dup
terminarea temporizrii releului d6 acesta i deschide contactul d6 [7-8] i scoate de
sub tensiune bobina contactorului C4 care nchide contactul [7] i motorul trece pe
prima treapta de turaie.
Contactorul C4 i mai deschide i contactul [18] scond de sub tensiune
bobina releului d5 care i ncepe temporizarea contactelor, mai deschide contactul [5]
ntrerupnd alimentarea bobinei contactorului de frn care i nchide contactele [14],
[17] ncepnd frnarea mecanic. Dup terminarea temporizrii releului d5 schema de
comand n curent alternativ i pierde alimentarea, bobina contactorului C3 i pierde
alimentarea, bobina releului d3 primete din nou alimentare alimentnd bobina releului d7
i deschizndu-i contactul de pe linia [5].
Acionarea proteciei.
n cazul apariiei unor scurtcircuite ntreruptorul automat decupleaz imediat
alimentarea cu tensiune a schemelor de for si comand. n cazul apariiei unei
suprasarcini pe orice treapta de turaie releele termice aflate n schema de comand i
for sesizeaz i i deschid contactele [12-17] ntrerupnd alimentarea bobinei
releului d4 (prezenta tensiune) care i deschide temporizat contactul de pe linia
[2] ntrerupnd alimentarea ntregii scheme de comand i motorul este frnat
mecanic. O nou pornire este posibil numai dup anularea suprasarcinii prin apsarea
butonului de anulare a zvorrii mecanice a bimetalelor releului termic. n cazul
apariiei unor anomalii operatorul are la ndemn butonul B3 fcndu-se astfel posibil
o ntrerupere rapid fr a mai aciona controlerul. Limitatoarele B1 i B2 ntrerup
alimentarea schemei atunci cnd crligul ajunge la poziie maxim(sus) sau (jos).
41
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
44/63
Figura nr. 3 Schema electric de acionare a mecanismului de ridicare-coborre
42
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
45/63
CAPITOLUL VII
Calculul de alegere al aparatelor de comand i protecie.
7.l. Alegerea contactoarelor de vitez c3, c4, c5:
Vom folosi regimul de funcionare AC = 3 utilizat la pornirea motoarelor cu rotorul n
scurtcircuit, reversarea i oprirea n plin mers a acestora.Pentru treapta de turaie mic -
contactorul c3
IN = 51A IP=75A
51
75=
N
P
I
I][5148,1 AII Ne === >=
Aleg contactorul de curent alternativ tip T.C.A. 63 A cu urmtoarele caracteristici:
Pentru contactele principale avem:
- tensiune nominal 500V
- curent nominal 63 A
- frecvena reelei 50 Hz
- tensiunea nominal 380 V
- curent nominal 2V
- puterea absorbit de bobin: inchis 25 VA; deschis 200 VA
- tensiunea de serviciu 380 V
- durata de via mecanic 5.000.000 manevre
- durata de acionare 100%
- curent de conectare 378 A
- curent de rupere 63 A
- tensiunea de lucru 380 V
- frecvena de conectare 300 con /h
- durata de conectare 40%
Pentru contactele auxiliare avem:
- durata de via electric 1.000.000 manevre
- curent de conectare 18 A
- curent de rupere 2 A
43
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
46/63
- tensiunea de lucru 380 V
- frecvena reelei 50Hz
- puterea absorbit nchis 10 VA i deschis 100 VA
- frecvena de conectare 600 con / h
- tip de protecie IP 000
- masa 155Kg.
- Contactoare de legtur:
- principale: minim lOmm2; maxim 16mm2
- auxiliare: minim l mm'; maxim 2,5 mm"
Pentru treapta de turaie medie - contactorul c4:
IN = 59A IP=150A
][595,259
150AII
I
INe
N
P === >==
Aleg contactor de curent alternativ tip T.G.A. 63 A cu aceleai caracteristici
prezentate precedent.
Pentru treapta de turaie mare - contactorul c5:
86,470
340==
N
P
I
I
IN = 70[A]
IN = 70 A IP = 340A IP / IN < 6
Aleg contactor de curent alternativ tip T.C.A. 125 A cu urmtoarele caracteristici:
- tensiune nominal 500V
- curent nominal 125 A
- frecvena relelei 50 Hz
- tensiunea nominal 380 V
- curent nominal 2A
- puterea absorbit de bobin: inchis 100 VA; deschis 750 VA
- tensiunea de serviciu 380 V
- durata de via mecanic 5.000.000 manevre, durata de acionare 100%
Pentru contactele principale avem:
- curent de conectare 660 A
44
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
47/63
- curent de rupere 125 A
- frecvena de conectare 120 con / h
- durata de conectare 40%
Pentru contactele auxiliare avem:
- durata de via electric l .000.000 manevre
- curent de conectare 18 A
- curent de rupere 2 A
- tensiunea de lucru 380 V
- frecvena de conectare 120 con / h
- tip de protecie IP 000
- masa 5,2 Kg.
- principale minim 16 mm2 ; maxim 25 mm2
- auxiliare minim l mm2; maxim 2,5 mm2
Conform STAS 4479 -67.
Contactoare de legtur:
][7086,470340 AIII
INe
N
P=== >==
7.2. Alegerea contactoarelor de sens c1 i c2:
Se aleg n funcie de curentul nominal al motorului i de curentul de pornire la cea
mai mare putere util la arbore.
n cazul nostru se aleg pentru treapta a III - a:
IN=70A IP = 340A IP/IN== => curentul echivalent de alegere este egal cu
curentul nominal pe treapta a III - a
Aleg pentru c1 i c2 contactorii de curent alternativ tip T.O.A. 125 A
urmtoarele caracteristici:
Pentru contactele principale:
- tensiunea nominal UN = 500 V;
45
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
48/63
- curentul nominal: IN = 125 A;
- frecvena reelei: f = 50 Hz;
- curentul de conectare: 660 A;
- curentul de rupere: 125 A;
- frecvena conectrilor: 125 conectri / or;
- durata de conectare: 40%;
- durata de via mecanic 5.000.000 manevre;
Pentru contactele auxiliare:
- tensiunea de lucru: 380 V;
- curentul de conectare: 18 A;
- curentul de rupere: 2 A;
- durata de via mecanic: 1.000.000 manevre;
Bobina contactorului:
- tensiunea de serviciu: 380 V;
- frecvena reelei: 50 HZ;
- puterea absorbit: nchis 100 VA i deschis 750 VA;
- tipul de protecie: IP000;
- diametrul conductoarelor de legtur:
pentru contactele principale, min. 16 mm2 max. 25 mm2
pentru contactele auxiliare, min. 1 mm2 max. 2,5mm2;
- puterea motorului acionat: 55 KW.
7.3. Alegerea contactorului de frn C6:
Curentul mediu absorbit de frn este IF = 6 A pentru frn ncorporat tip T.M.T. -4.
Curent de conectare Ic = 8,4 A.
Alegem contactor de curent alternativ tip T.C.A. - 10 cu urmtoarele caracteristici:- tensiune nominal 500V contacte principale
- curent nominal l0 A
- tensiunea nominal 380 V contacte auxiliare
- curent nominal 6A
- puterea absorbit de bobin: inchis 17 VA; deschis 55 VA
- durata de via mecanic l .000.000 manevre
- durata de acionare 100%
46
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
49/63
- curent de conectare 66 A
- curent de rupere 0,35 A
- tip de protecie IP 000
- masa 0,58 Kg.
conductoare de legtur: auxiliare minim l mm2; maxim 2,5 mm2
7.4. Alegerea releeului intermediar d3:
Este destinat realizrii diferitelor conexiuni n schema de comand n cazul n care
contactele auxiliare ale contactelor principale sunt suficiente la numr.
Se aleg n funcie de tensiunea de alimentare a schemei de comand i de curentul prin
contactele acestora. Pentru d3 alegem releu intermediar de curent alternativ tip R13 cu
urmtoarele caracteristici:
- tensiunea de serviciu 12, 24,48,110, 220, 380 V 50Hz;
- frecvena reelei 50 Hz;
- puterea absorbit: nchis 16 VA; deschis 30 VA;
- durata de viat mecanic l .000.000 manevre ;
- durata de conectare 100%;
- curent de conectare 5 A;
- curent de deconectare 5 A;
- tip de protecie IP 000;
- masa 0,7 Kg;
- factorul de putere cos 0,5;
7.5. Alegerea releului de tip d7:Acestea realizeaz trecerea temporizat pe treapta a III-a
Timpii de acionare sunt reglai la valorile calculate la regimul tranzitoriu
electromagnetic.
Se aleg n funcie de tensiunea de alimentare a schemei de comand, de timpii de
acionare cerui i de curentul prin contacte:
Pentru releul d7:UN = 380V
47
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
50/63
Curentul cerut de contactorul c4: ][8,0cos3/ AUSI ==
Alegem releul temporizat la acionarea de tip Rl 3T cu caracteristicile:
- tensiunea de serviciu: 12, 24, 48,110,125, 220, 380, 500 V;
- frecvena de serviciu 50 Hz;- puterea absorbit: deschis - 30 VA; inchis - 16 VA;
- durata de viat mecanic l .000.000 manevre;
- durata de viat electric l .000.000 manevre;
- factorul de putere cos 0,5;
- curentul de conectare 20 A;
- curentul de deconectare 5 A;
- tensiunea de lucru 220 V;- frecvena de conectare 1 200 con / h;
- durata de conectare 100%;
- tipul de protecie IP 300;
- poziia de funcionare vertical;
- masa 1Kg;
7.6. Alegerea releului minimal de tensiune d4:
Se utilizeaz pentru protecia instalaiilor electrice, acionnd cnd mrimea controlat
scade sub valoarea minim. Pentru o tensiune a relaiei de 380 V valoarea minim acceptat
este de 320 V. Am ales releul minimal de tensiune RT 2 cu urmtoarele caracteristici:
- tensiunea de serviciu: 320V;
- frecvena reelei 50 Hz;
- puterea absorbit: 2 VA;
- durata de via mecanic 500 manevre;
- durata de via electric 500 manevre;
- factorul de putere cos 0,4;
- curentul de conectare 1A;
- curentul de deconectare l A;
- tensiunea de lucru 220;
- frecvena de conectare 1200 con/h ;
- durata de conectare 100%;
48
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
51/63
- timpul de acionare 150 ms la 0,8 U reglat;
- tipul de protecie IP 300;
- poziia de funcionare vertical ;
- masa l,5Kg.
7.7. Alegerea controlerului de comand:
Pentru realizarea celor 6 regimuri de funcionare este necesar un controler cu 3-0-3
poziii i cel puin 5 contacte cu diagrama prezentat n schema de comand.
Curentul prin contacte are o valoare maxim de 1,5 A.
Tensiunea nominal a controlerului este de 380 V. Am ales pentru comanda
motorului un controler pentru circuite auxiliare curent alternativ cu urmtoarea diagram a
contactelor:
TABELUL Nr.6 Diagrama contactelor
Poziia de acionareStnga 0 Dreapta
3 2 1 1 2 3Poziia contactelor
X
X X X X X X
. X X XX X XX X X XX X
Controlerul este de tip CM 3 cu 3-0-3 poziii cu urmtoarele caracteristici:
- tensiunea nominal: 500 V;
- curentul nominal l0 A;
- durata de via mecanic 1.000.000 manevre;
- durata de via electric 100.000 manevre;
- factorul de putere 0,8 - 0,2;
- curentul de conectare l0 -6 A ;
- curentul de deconectare l0 - 6 A ;
- tensiunea de lucru 500 V;
- frecvena de conectare 600 con / h ;
- factorul de putere cos 0,8 - 0,2 ;
49
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
52/63
- curentul de conectare 12,5 - 7,5 A;
- curentul de deconectare 12,5 - 7,5 A;
- tipul de protecie IP 300;
- conductoare de legtur minim l mm
2
; maxim 2,5 mm
2
- masa 21 Kg.
7.8. Alegerea siguranelor fuzibile:
Sunt folosite prontru protecia circuitului de comand.
Se dimensioneaz n funcie de curentul maxim absorbit pe cele trei trepte de
funcionare de ctre aparatele de comutaie.
Pentru treapta a III-a funcioneaz:
Iabsorbit= Idl+Id8+Id3+Ic2+Ic5+Ic7=2,002+0,25+0,25+0,8+0,8+0,8=3A
Alegem sigurane fuzibile cod 4001 de 6A / 380 V.
Curentul nominal termic 6 A.
Curentul maxim la 380 V; 25 A
7.9. Alegerea ntreruptorului automat:
Se face n funcie de curentul maxim cerut de cele trei scheme pe care le
aliniaz: I max c = 70+5+2(39+5)= 163 A
I max c = I ridicare + I basculare + I rotire.
Curentul nominal al ntreruptorului automat este cel mai mare curent aproximativ n
valori efective sub care ntrerupatorul automat poate funciona n regim permanent fr calimitele admisibile de nclzire s fie depite.
Curentul de rupere al ntreruptorului automat este cel mai mare curent de scurtcircuit
pe care ntreruptorul l poate rupe n condiii normale.
Curentul de nchidere al unui ntreruptor automat se exprim prin curentul pe care
acest ntreruptor l poate stabili sub o tensiune dat n condiii de exploatare prescrise.
Pentru curentul maxim cerut, de 163 A, alegem un ntrerupator automat tip USOL 250
A cu urmtoarele caracteristici:
50
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
53/63
- tensiune nominal 500V
- curent nominal 250 A
- tensiunea nominal 500 V
- curent nominal 6A
Capacitatea de rupere a contactelor auxiliare:
- tensiunea de lucru 550 V
- curent de conectare 22,5 A
- curent de deconectare 7,5 A
- factorul de putere cos 0,35
- tip de protecie IP 000
Capacitatea de rupere a contactelor principale:
- tensiunea de lucru 550 V
- curent de serviciu 250 A
- curent de conectare 20.000 A
- curent de deconectare 10.000 A
- factorul de putere cos 0,3
- timp de rupere 10-15 secunde
Cabluri de legtur la borne:
- contacte principale minim 50 mm2; max 120 mm2
- contacte auxiliare minim 0,75 mm2; max l ,5 mm2
- tensiunea de serviciu a releelor de minim tensiune 380V
- limitele de reglaj a releelor termice la 45 0,8 l Is.
7.10. Alegerea releelor termice:
Releele termice cu bimetal se utilizeaz pentru protecia motoarelor electricempotriva suprasarcinilor. Nu acioneaz imediat ce curentul crete ci dup o anumit
perioad de timp invers proporional cu curentul. Se folosesc pentru protecia
instalaiilor complexe de automatizare.
Pentru treapta I releul termic 1et :
IN = 51 A
Alegem releul termic TSA 63, Irt = 0,35 INT Irt = curentul limit reglat termic
INT = curent nominal al releului termic
51
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
54/63
Pentru treapta a II-a releul termic 2et:
IN = 59 A
Alegem releul termic TSA 63, Irt = 0,9 INT
Pentru treapta a III-a releul termic 3et:
IN = 70 A
Alegem releul termic TSAW 400, ISERVICIU = 80 A
Irt = 0,9ISERVICIU = 72A
CAPITOLUL VIII
Tehnologia ntreinerii i reparrii sistemului de acionare electric
8.1. Reparaii i revizii:
Pentru a preveni uzura i a asigura o durat mai mare de serviciu, mainile i
echipamentele electrice sunt supuse sistemului de control i reparaii planificate.
Repararea echipamentelor electrice se poate efectua dup urmtorul sistem:
- Sistemul de reparaii executate dup necesitate const n efectuarea lucrrilor de
reparaii a mainilor i echipamentelor electrice atunci cnd acestea ajung n starea n
care nu mai pot fi meninute n exploatare. Are dezavantajul c permite ieirea brusc
din exploatare a mainilor electrice.
- Sistemul de reparaii cu planificare rigid consta n scoaterea obligatorie din
funciune a mainilor electrice pentru executarea reparaiilor la anumite perioade stabilite
indiferent de starea tehnic, precum i repararea sau nlocuirea pieselor, ansamblelor
stabilite n funcie de normele de uzur specifice mainilor electrice ce lucreaz n instalaia
respectiv. Acest sistem este simplu att n ceea ce privete organizarea ct i ca pregtire i
planificare a lucrrilor de reparaii. Este dezavantajos pentru c se nlocuiesc i elemente
care nu ar trebui nlocuite fcndu-se astfel risipa de materiale.
52
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
55/63
- Sistemul de reparaii executate dup controlul strii mainii electrice se bazeaz pe
rezultatele controlului periodic a strii mainii electrice n timpul exploatrii. La acest
sistem, nu se planific reparaiile ci numai controlul strii i funcionarii echipamentului.
Dac la control se constat o uzur avansat a acestuia ce are ca efect scoaterea din
funciune a utilajului atunci se recurge la executarea reparaiei respective. Pe baza datelor de
control se planific volumul, durata reparaiei, se pregtesc piesele de schimb i materialele
necesare.
Sistemul preventiv de reparaii periodice planificate se caracterizeaz prin faptul c
reparaiile se execut planificat dup un anumit numr de ore de funcionare a mainilor
electrice. Acest numr de ore se stabilete pentru frecvena mainilor electrice, a fiecrui
utilaj din instalaie n raport cu condiiile n care funcioneaz i pe baza studiului amnunit
al alegerii diferitelor piese sau subansamble. Acest sistem admite modificarea continu a
normelor de reparaii n raport cu rezultatele controlului planificat.
n prezent, ntreinerea i repararea mainilor electrice se face dup urmtoarele
sisteme adaptate la o nav:
-sistemul de revizii tehnice RT;
-reparaii curente de gradul I-RCl i IIRC 2;
- reparaii capitale;
Reviziile tehnice constau n operaiile ce se execut de regul naintea unei operaii
planificate, n scopul determinrii strii tehnice a mainii i echipamentului, precum i
operaiile ce urmeaz a se executa cu ocazia primei reparaii planificate pentru a se asigura
n continuare funcionarea normal a mainii i echipamentului, i se execut de regul, n
timpul opririlor de scurt durat a utilajului acionat. n timpul acestor revizii se curat
prile accesibile ale mainilor, aparatelor, prin nlturarea prafului cu un aspirator sau prin
suflarea cu aer comprimat uscat (max. 2 atm.),se nlocuiesc periile uzate cu altele noi, se
verific funcionarea port-periilor, uzura lagrelor, se execut ungerea lor.De obicei, n timpul acestor revizii se execut simultan i ncercrile mainilor:
- msurarea rezistentei de izolaie;
- msurarea rigiditii dielectrice a izolaiei mainilor;
- msurarea btilor la ax, etc. i se nltur defeciunile constatate;
Reparaiile curente RC1 si RC2 asigur meninerea n perfect stare de funcionare a
echipamentului electric i const n interveniile ce se execut periodic,planificate n
53
-
7/29/2019 112665882 Proiectarea Instalatiei de Incarcare Descarcare
56/63
scopul nlturrii uzurii sau a unor deteriorri survenite n exploatare, recondiionarea i
nlocuirea unor pri de subansamble uzate.
RC1 const n executarea demontrii pariale a mainii electrice la locul de
dispunere, se nlocuiesc piesele uzate i se nltur defeciunile mici. Se face verificarea
cutiei de borne (nlocuirea uruburilor, papucilor uzai). Se verific uzura periilor
(nlocuirea periilor uzate i ajustarea). Se verific colectorul (lefuirea i curarea cu
crp cu alcool tehnic). Se verific starea izolaiei nfurrii ntre ele i faa de main,
recondiionarea n locurile deteriorate sau slbite. Se vopsete maina electric i se ung
lagrele.
RC2 necesit demontri pariale sau totale ale mainii electrice. Se execut toate
operaiile de Ia RC1 i n plus: verificri i reparaii mrunte la mecanismul pentru
apsarea periilor pe colectoarele mainilor electrice, curire