Proiectarea Instalatiei de Incarcare-Descarcare
88
UNIVERSITATEA MARITIMĂ CONSTANŢA FACULTATEA DE ELECTROMECANICĂ NAVALĂ SPECIALIZAREA SISTEME ELECTRICE LUCRARE DE LICENŢĂ Conducator Ştiinţific: Conf. univ. dr. ing. Violeta-Vali Ciucur
-
Upload
mihai-cretu -
Category
Documents
-
view
580 -
download
10
Transcript of Proiectarea Instalatiei de Incarcare-Descarcare

UNIVERSITATEA MARITIMĂ CONSTANŢA
FACULTATEA DE ELECTROMECANICĂ NAVALĂSPECIALIZAREA SISTEME ELECTRICE
LUCRARE DE LICENŢĂ
Conducator Ştiinţific: Conf. univ. dr. ing. Violeta-Vali Ciucur
Absolvent: Creţu Mihai-Octavian
-2010-

UNIVERSITATEA MARITIMĂ DIN CONSTANŢA
FACULTATEA DE ELECTROMECANICĂ NAVALĂSPECIALIZAREA SISTEME ELECTRICE
LUCRARE DE LICENŢĂ
Cargou mărfuri generale 7800 dwt.
Proiectarea instalatiei de
încărcare-descarcare
COORDONATOR ŞTIINŢIFIC: Conf. univ. dr. ing. Violeta-Vali Ciucur
Absolvent: Creţu Mihai-Octavian
-2010-

CUPRINS :
Introducere .....................................................................................................3
Listă tabelelor si a figurilor ............................................................................4
CAPITOLUL I Generalităţi. Stabilirea datelor iniţiale pentru proiectarea în raport cu
destinaţia şi prevederile legislaţiei în vigoare: .......................................................5
1.1. Instalaţii de încărcare – descărcare
............................................................5
1.2. Clasificarea şi descrierea instalaţiei de încărcare - descărcare cu bigi de
marfă.....6
1.2.1. Biga propriu -
zisă...........................................................................7
1.2.2. Manevre
curente.............................................................................8
1.2.3. Palancul de sarcină
.........................................................................8
1.2.4. Mecanisme de manevră
..................................................................8
1.3. Metode de utilizare a instalaţiei de încărcare - descărcare cu bigi navale...9
1.3.1. Metoda de operare cu o singură bigă cu un mandar dublu..................9
1.3.2 Metoda de operare cu două bigi cu palancurile cuplate......................10
1.3.3 Metoda de operare cu două bigi cu bigi mobile cuplate.....................10
1.3.4 Metoda de operare cu două perechi de bigi fixe la gura de magazie....11
CAPITOLUL II Stabilirea schemei cinematice. Descrierea diagramei de sarcină
2.1. Mecanismul de ridicare a
sarcinii .............................................................14
2.2. Calculul transmisie prin
cablu .................................................................15
2.3. Dispozitivul de prindere a
sarcinii .............................................................15
2.4. Calculul de alegere a
cablului ..................................................................16
1

2.5. Calculul cablului de
tracţiune....................................................................16
2.6. Determinarea elementelor principale ale
tobei............................................17
2.7. Alegerea
cuplajului.................................................................................18
2.8. Reductorul............................................................................................18
2.9. Rolele de egalizare şi
ghidare....................................................................19
CAPITOLUL III Alegerea motorului electric de acţionare pentru mecanismul de ridicare
3.1. Alegerea preliminară a motorului
electric..................................................20
3.2. Alegerea motorului
electric.......................................................................20
3.3. Caracteristicile
mecanice..........................................................................21
CAPITOLUL IV Calculul diagramei de sarcină pentru mecanismul de ridicare..........25
4.1. Ridicarea sarcinii
nominale......................................................................25
4.2. Coborârea cu frânare a sarcinii
nominale...................................................26
4.3. Ridicarea cârligului
gol............................................................................27
4.4. Coborârea forţată a cârligului
gol..............................................................29
4.5. Verificarea motorului din punct de vedere al
productivităţii..........................31
4.6. Verificarea motorului electric la
încălzire..................................................31
CAPITOLUL V Calculul regimului tranzitoriu electromecanic.............................32
5.1. Determinarea momentului
volant.................................................................32
2

5.2. Determinarea constantei de timp pentru cele trei trepte de
viteză..................32
5.3. Determinarea timpilor de
pornire..............................................................33
5.4. Calculul timpilor de
frânare......................................................................33
CAPITOLUL VI Stabilirea schemei electrice a sistemului de acţionare...................34
6.1. Date tehnice...........................................................................................34
6.2. Elementele componente ale schemei ...........................................................34
6.3. Principiul de funcţionare al schemei..........................................................35
CAPITOLUL VII Calculul de alegere al aparatelor de comandă si protecţie ............40
7.1 Alegerea contactoarelor de viteză C3,C4,C5...............................................40
7.2. Alegerea contactorilor de sens C1,C2 .......................................................42
7.3. Alegerea contactorului de frână C6...........................................................43
7.4. Alegerea releului intermediar d3..............................................................44
7.5. Alegerea releului de tip d7........................................................................44
7.6. Alegerea releului minimal de tensiune d4...................................................45
7.7. Alegerea controlerului de comandă...........................................................45
7.8. Alegerea siguranţelor fuzibile...................................................................47
7.9. Alegerea întrerupătorului automat..............................................................47
7.10 Alegerea releelor termice..........................................................................48
CAPITOLUL VIII Tehnologia întreţinerii şi reparării sistemului de acţionare
electrică..........................................................................................................49
8.1. Reparaţii şi revizii...................................................................................49
8.1.1. Tehnologia stabilirii defectelor în instalaţia electrică..........................51
8.2 Principalele defecte şi modul de remediere...........................................................53
3

Concluzii.............................................................................................................................56
Bibliografie.........................................................................................................................57
INTRODUCERE
Navele moderne se caracterizează prin viteze de marş ridicate. De aceea, timpul de
parcurgere a unei curse este de acelaşi ordin de mărime cu timpul de staţionare a navei în
porturi pentru încărcarea si descărcarea mărfurilor. Cele mai mari pierderi de timp au loc in
timpul operaţiunilor de încărcare - descărcare efectuate în porturile insuficient echipate cu
mecanisme de ridicare. În acest caz, operaţiile respective trebuie efectuate cu mijloace de
încărcare - descărcare de la bordul navei. În ultimii ani s-a observat o creştere neîntreruptă a
transporturilor de mărfuri navale datorită construirii unor tipuri speciale de nave echipate cu
mecanisme de încărcare - descărcare de productivitate mărită, principalul rol în mărirea
productivitaţii avându-l automatizarea procesului de încărcare si descărcare a navelor.
Automatizarea mecanismelor de încărcare - descărcare trebuie sa le confere acestora
siguranţa în funcţionare, depanare comodă, mase şi gabarite reduse etc.
Productivitatea mecanismelor de încărcare - descărcare în timpul diferitelor regimuri
de funcţionare se caracterizează prin cantitatea de mărfuri descărcate în unitatea de timp.
Productivitatea practică trebuie diferenţiată de cea teoretică. Productivitatea practică
depinde nu numai de caracteristicile mecanismului de încărcare - descărcare, ci şi de felul
mărfurilor, de pregătirea mărfurilor pentru operaţiile de încărcare - descărcare etc.
Productivitatea teoretică depinde numai de caracteristicile mecanismului de încărcare -
descărcare şi este conditionată de viteza de ridicare a sarcinii, de viteza de coborare a
cârligului fără sarcină, precum si de timpul de accelerare a acţionării.
Fiabilitatea funcţionării mecanismului de încărcare - descărcare este în funcţie de
fiabilitatea elementelor componente, inclusiv a acţionării electrice şi a schemei de comandă.
Simplitatea deservirii depinde de accesul uşor la elementele componente care necesită
operaţii de întreţinere şi reparaţii. Simplitatea comenzilor este condiţionată de posibilitatea
efectuării comenzilor de către personalul necalificat.
Dezvoltarea sistemelor automate de încărcare - descărcare se caracterizează prin
prezenţa câtorva nivele de automatizare. Sistemele cu comandă directă, prin controler,
corespund primului nivel de automatizare. În cel de-al doilea nivel sunt cuprinse acţionări
electrice care au scheme de comandă la distantă cu reacţie inversă. Cel de-al treilea nivel
prevede construirea unor posturi de comandă centralizată a unor sisteme automate pentru un
grup de mecanisme de încărcare - descărcare şi utilizarea unor calculatoare de proces cu
2

scopul efectuării întregului complex de operaţii de încărcare - descărcare fără participarea
operatorului.
Listă figuri
- Figura nr. 1 Biga de marfă...................................................................12
- Figura nr. 2 Caracteristicile mecanice n = f (M)…………………..…24
- Figura nr. 3 Schema electrică de acţionare a mecanismului de ridicare-
coborâre………………………………………………………………………………..……39
Listă tabele
- Tabelul nr. 1 Parametrii motorului electric..............................................................21
- Tabelul nr. 2 Caracteristica mecanică naturală pentru treapta a III-a de turaţie......23
- Tabelul nr. 3 Caracteristica mecanică naturală pentru treapta a II-a de turaţie........23
- Tabelul nr. 4 Caracteristica mecanică naturală pentru treapta I de turaţie ..............23
- Tabelul nr. 5 Regimul de lucru..................................................................................30
- Tabelul nr.6 Diagrama contactelor............................................................................46
3

CAPITOLUL I
Generalităţi. Stabilirea datelor iniţiale pentru
proiectarea în raport cu destinaţia şi prevederile legislaţiei în vigoare
1.1. Instalaţii de încărcare – descărcare:
Prin instalaţii gravitaţionale se înteleg sistemele mecanice care au ca scop
învingerea, în prezenţa frecării, a forţelor de gravitaţie, în vederea deplasării pe verticală sau
pe orizontală a unor mase ca: mărfuri generale ( instalaţii de ridicat ), bărci de salvare sau de
serviciu ( instalaţii de salvare ), capace mecanice ale gurilor de magazii.
Manipularea mărfurilor poate fi realizată cu:
- instalaţii cu bigi de marfă
- instalaţii cu cranice
- poduri rulante
- instalaţii speciale ( benzi rulante )
Navele de transport maritim sunt, in general, dotate cu o instalaţie de manipulare a
mărfurilor de construcţie specială în scopul efectuarii operaţiilor de încărcare - descărcare de
mărfuri.
Această instalaţie, numită de încărcare - descărcare, esta adoptată si proiectată în
raport cu destinaţia navei. Instalaţia de încărcare - descărcare oferă posibilitatea manipulării
mărfurilor, independent de instalaţiile portuare asigurandu-i, astfel, operativitatea în orice
port de escală.
Performanţele tehnice şi de exploatare ale instalaţiei vor trebui să răspundă
condiţiilor generale de ordin economic privind reducerea staţioăarii navei în porturile de
escală.
Analizele economice arată că la cargouri cât şi la navele de transport specializate
durata staţionării în porturi este mai mare decat timpul folosit pentru deplasări între porturile
4

de escală, iar în porturi majoritatea timpului este consumat în cadrul operaţiunilor de
încărcare - descărcare.
Instalaţia de încărcare - descărcare din dotarea majorităţii navelor destinate
transportului de mărfuri generale şi mai ales cele de constructie mai veche, se compune din
bigile navale de marfă, cu toate mecanismele, manevrele curente şi accesoriile relativ
complexe, implicate de utilizarea acestui sistem.
Numeroase nave, şi în mod deosebit cargourile moderne de mărfuri generale, au
înlocuit instalaţia clasică de încărcare bazată pe bigi, prin macarale navale acţionate electric
sau hidraulic, care măresc viteza de operare şi siguranţa în manipulare, dar sunt limitate în
privinţa capacităţii de ridicare faţă de posibilitatea bigilor şi mai ales ale celor de mari
greutăţi.
Instalaţiile de încărcare - descărcare se caracterizează prin:
- capacitatea de încărcare a mecanismului sau capacitate de încărcare în siguranţă
SWL ( Safe Working Load ), care reprezintă greutatea maximă admisibilă ce poate fi
ridicată cu instalaţia respectivă; ea cuprinde şi greutatea dispozitivelor auxiliare folosite
pentru fixarea şi manipularea încărcăturii: zbiruri, palancuri, platforme, plase, bene, etc.;
- productivitatea instalaţiei de încărcare - descărcare , care este caracterizată de
cantitatea de marfă în unitatea de timp;
- regimul de funcţionare, care este determinat de caracteristica operaţiei de încărcare -
descărcare şi funcţie de natura marfii. Putem avea: regim de funcţionare de lungă durată,
regim de funcţionare de scurtă durată, regim de funcţionare cu intermitenţă;
- siguranţa în exploatare, ce caracterizează funcţionarea fără întrerupere a instalaţiei
din punct de vedere mecanic şi electric;
- simplitatea montării, ceea ce implică dispunerea întregii instalaţii pe acelaşi suport;
- deservire simplă, înţelegând prin aceasta accesul rapid şi comod la instalaţia de
încărcare - descărcare pentru reparaţii;
- simplitatea conducerii, adică punerea uşoară în funcţiune şi manevrarea simplă;
- economicitatea, adică preţ de cost scăzut al instalaţiei, preţ de întreţinere mic,
funcţionare cu randament ridicat, consum energetic scazut;
1.2. Clasificarea şi descrierea instalaţiei de încărcare - descărcare cu bigi de
marfă:
Există două tipuri de bigi navale:
- biga uşoară, care are capacitatea de ridicare sub 10 tf;
5

- biga grea, care are capacitatea de ridicare de 10 tf sau mai mult;
Instalaţia de încărcare - descărcare este compusă din următoarele elemente:
- coloana ( catarg )
- biga de marfă, din tub metalic sau o flesă de lungime şi diametru determinate,
articulat cu capătul inferior aproape de baza coloanei; biga este mobilă atât în plan orizontal
cât şi în plan vertical, în anumite limite calculate;
- manevrele curente, de regulă sub forma unor palancuri, servind pentru orientarea
bigii în planul orizontal şi vertical şi la fixarea acesteia în poziţie de lucru;
- palancul de sarcină, destinat ridicării şi coborârii coţadei;
- mecanismele de manevră, troliu pentru balansină şi vinci de marfă pentru
manevrarea palancului de marfă al bigii.
1.2.1. Biga propriu-zisă:
Lungimea tubului metalic trebuie să asigure, la unghiul minim de operare, bătaia
bigii până la 2/3 din lungimea gurii de magazie pe care o deserveşte. În poziţia de lucru în
afara bordului biga trebuie să bată minimum 2,5 m dincolo de copastia navei, la înclinare θ
= 30°, aşa încât să poată opera la vagoanele primei linii de cale ferată de lângă cheu.
Diametrul bigii este mai mare la mijlocul lungimii tubului spre a putea suporta bine
efortul axial de compresie pe timpul lucrului în sarcină, cât şi eforturile de încovoiere la care
este supus pe timpul operaţiunilor.
Capătul superior al bigii este prevazut cu armături sub forma unei brăţări cu urechi
pentru balansină, gaiuri şi pentru palancul de sarcină.
Capătul inferior al bigii este articulat pe catargul suport sau pe coloane de bigi,
asigurându-se mişcarea în înălţime şi pe orizontală.
Coloana de bigi este un arbore metalic tubular, mai scurt decat arborii navei, cu
diametrul relativ mare, deci foarte rezistent, pe care se articulează una sau mai multe bigi ale
instalaţiei de încărcare.
Bătaia bigii ( raza de acţiune ) este distanţa măsurată în plan orizontal a porţiunii de
la punctul de articulaţie al bigii la coloană, până la verticala palancului de sarcină. Este
variabilă în raport cu unghiul de înclinare al bigii şi cu lungimea acesteia. ( X = 1cosθ ).
Unghiul de înclinare al bigii este unghiul măsurat în plan vertical, format de direcţia
bigii cu planul orizontal. Pentru bigile uşoare unghiul mediu de lucru se consideră 30°, iar
pentru bigile grele, 25°.
6

Articulaţia bigii la coloană trebuie să permită manevra simultană a bigii atât în plan
orizontal, cât şi în plan vertical, având rezistenţa cerută de eforturile de compresie ce se
exercită de-a lungul bigii sub sarcină.
1.2.2. Manevre curente:
a) Balansina bigii este manevra curentă destinată să manevreze biga în plan vertical şi
să o fixeze în poziţia de lucru la un unghi de înclinare stabilit.
b) Gaiurile şi contragaiurile, sunt manevre curente destinate orientării bigii în plan
orizontal, fixarea acesteia în poziţia de lucru şi, la nevoie, în raport cu metoda de
lucru, rotirii bigii în direcţie cu coţada de marfă.
c) Gaiul ( palancul ) de distanţare, face legătura între capetele superioare a două bigi
care operează la aceeasi magazie, după una din metodele de lucru cu două bigi.
Rolul gaiului de distanţare constituit, de regulă, dintr-un palanc cu macarale multiple,
este de a înlocui gaiurile interioare ale celor două bigi descongestionând astfel locul de
muncă.
1.2.3. Palancul de sarcină:
Palancul de sarcină serveşte la manevra greutăţilor, macaraua superioară a palancului
se prinde de armătura capătului superior a bigii. Capătul trăgător iese prin macaraua
superioară sau prin macaraua inferioară, după cum palancul funcţionează trăgând sau
ridicând şi este dirijat prin pastica de ghidare la tamburul vinciului de marfă.
Tipul palancului de sarcină depinde de capacitatea de ridicare a bigii. La bigile de 1-3
tf capacitate, palancul este un mandar simplu spre a asigura o viteză de operare cât mai
mare. Pentru greutăţile mai mari se prevăd palancuri cu macarale multiple, dar a căror viteză
de operare scade.
1.2.4. Mecanisme de manevră:
a) Troliile balansinelor sunt instalate la baza coloanelor de susţinere a bigilor şi pot
fi acţionate independent sau de către vinciurile de marfă, prin intermediul unui cablu de
transmisie. Sunt prevăzute dispozitive cu clichet pentru evitarea desfăşurării cablului în
cazul decuplării vinciului sau deconectării curentului electric. Pe tamburul troliului, capătul
trăgător al balansinei este necesar să aibă înfăşurate minimum 3 spire de cablu în poziţia de
lucru, la unghiul minim de înclinare.
7

b) Vinciurile de marfă pot fi acţionate cu aburi, electric sau hidraulic şi au rolul de
a manevra palancul de sarcină prin intermediul capătului trăgător înfăşurat pe tamburul
vinciului.
Vinciul de marfă are şi tamburi pentru parâme şi la fiecare capăt al axului pentru
manevre diferite la bord, inclusiv pentru manevra navei.
Vinciurile electrice au frână de mână sau de picior, folosind exclusiv pentru reglarea
vitezei de ridicare sau coborâre a greutăţii, dar nu şi pentru stopare.
De asemenea, dispun de o frână automată pentru oprirea manevrei în cazul
întreruperii curentului din cauza unei defecţiuni.
Unele vinciuri de forţă sunt prevăzute cu două sisteme de acţionare dintre care unul
este destinat manevrei greutăţilor mari ( cu viteză mică ).
La vinciurile cu acţionare hidraulică se prevăd dispozitive care să excludă
posibilitatea căderii încărcăturii sau deplasării necontrolate a bigii la scăderea presiunii în
instalaţia hidraulică.
Frânele vinciului trebuie să acţioneze lin, fără şocuri.
Tamburele vinciurilor trebuie să aibă o lungime care să permită înfăşurarea capătului
trăgător într-un singur strat. Nu se admite înfăşurarea cablului pe mai mult de 3 straturi.
Tamburele vinciurilor cu cablu înfăşurat pe un singur strat trebuie sa aibă straturi
elicoidale. Gulerele tamburelor netede trebuie să se înalţe deasupra stratului superior al
cablului cu cel puţin 2,5 ori diametrul cablului.
1.3. Metode de utilizare a instalaţiei de încărcare - descărcare cu bigi navale:
Instalaţia de încărcare - descărcare cu bigi navale poate fi utilizată după mai multe
metode de exploatare în raport de:
- numărul de bigi care deservesc o magazie;
- felul mărfii şi greutatea diferitelor piese;
- condiţiile specifice şi siguranţa în manipulare cerute de natura mărfii.
Bigile usoare navale sunt prevăzute, în general, cu un palanc de sarcină de tipul
mandarului simplu, cu cablu de sarcină de diametru corespunzător greutătilor normale de
manipulat . Acest lucru conduce la avantajul asigurării unei viteze mari de operare,
mandarul fiind cu un singur rai.
1.3.1. Metode de operare cu o singură bigă cu un mandar dublu:
8

Este cea mai eficientă metodă de exploatare spre a manipula greutăţi mai mari decât
capacitatea de ridicare a mandarului simplu, respectând capacitatea de ridicare în siguranţă a
bigii.
Se utilizează când la o magazie se dispune de o singură bigă sau, când din diferite
motive, nu se poate folosi a doua bigă. Biga se armează uşor, se manevrează repede şi
coţada poate fi amplasată aproape în orice loc, pe suprafata de operare, după necesitate.
Dupa ridicarea greutăţii din magazie, cu ajutorul mandarului dublu, biga cu greutatea
se manevrează în direcţie cu ajutorul gaiurilor, apoi coţada se coboară şi se dispune pe locul
stabilit.
Metoda are avantajul măririi câştigului de forţă ( F = 12/20 Q faţă de F = 11/10 Q al
mandarului simplu ) şi dezavantajul reducerii vitezei de operare.
1.3.2. Metode de operare cu două bigi cu palancurile cuplate:
Această metodă mai poartă denumirea de metoda de lucru în telefon şi constă în
deplasarea coţadei de marfă folosind simultan vinciurile şi palancurile de sarcină ale celor
două bigi aflate la capătul unei guri de magazie, aşezate în poziţie fixă atât ca înclinare cât şi
ca direcţie; biga de magazie se fixează deasupra gurii de magazie şi are rolul de a ridica sau
coborî din magazie; biga exterioară se fixează lateral, deasupra locului unde coboară sau
ridică greutatea.
Aceste metode au o variantă prin utilizarea ca palanc de sarcină la fiecare bigă a
unui mandar dublu în loc de unul simplu, ceea ce asigură un mare câştig de forţă. Macaraua
alunecatoare a fiecărui mandar dublu este prinsă cu o cheie de împreunare a carligului de
ridicare comun. Fiecare bigă se fixează pe poziţie prin manevrele curente proprii ( balansine
şi contragaiuri ).
1.3.3. Metoda de operare cu două bigi mobile cuplate:
O greutate mai mare decât capacitatea de ridicare a unei singure bigi poate fi ridicată
folosind două bigi care lucrează în cuplu ca o singură bigă mobilă.
În acest caz, mandarul fiecăreia din cele două bigi se prinde la verticală, cu cârligul
de ridicare, de capetele respective ale unei traverse de cuplare, care serveşte ca mijloc de
echilibrare a eforturilor pe vinciul de marfă; greutatea de manevrat se controlează la
mijlocul acestei traverse.
Cele doua bigi sunt aşezate în poziţia fixată pe timpul ridicării şi coborârii greutăţii,
folosind manevrele curente ( balansine, contragaiuri, palancuri de distanţare ). Pentru
9

deplasarea coţadei, spre exemplu de la magazie spre cheu, se ridică greutatea cu vinciurile
ambelor bigi, simultan; apoi, prin intermediul gaiurilor, ambele bigi sunt manevrate
simultan spre cheu şi greutatea se coboară actionând vinciurile.
Metoda este în general dificilă, poate impune lăsarea greutăţii pe punte spre a
schimba poziţia bigilor şi implică numeroase măsuri de siguranţă. De aceea, se utilizează în
cazuri excepţionale.
1.3.4. Metoda de operare cu două perechi de bigi fixate la gura de magazie:
Multe nave sunt prevăzute cu guri de magazie deservite de două perechi de bigi
obişnuite. Acestea pot opera cu una din metodele indicate sau două perechi de bigi cuplate.
Cele 4 bigi se armează astfel:
- bigile prova si pupa se fixează ca înclinare şi direcţie ca în metoda de operare cu
palancuri cuplate ( telefon );
- apoi, mandarul bigii de magazie şi respectiv al bigii exterioare din prova magaziei se
trec prin câte o macara alunecătoare şi se îmbină printr-o cheie de împreunare cu mandarul
bigii corespunzatoare din pupa magaziei;
- cele doua macarale alunecătoare care unesc mandarele bigilor prova - pupa din
acelaşi bord se manevrează aşa încât cheile de împreunare ale mandarelor să se înalţe
aproape de capetele superioare ale macaralelor din pupa magaziei;
- dupa aceasta, cele două macarale alunecătoare se leagă între ele cu chei de
împreunare şi cu lanţ, de care se prinde cârligul de ridicare.
Sistemul astfel pregătit este acţionat numai de vinciurile macaralelor din prova,
funcţionând pentru încărcarea şi descărcarea în sistemul bigilor cuplate ( telefon ) şi putând
manipula greutăţi ceva mai mici decat suma capacităţilor de ridicare în siguranţă ale celor
două mandare. Sistemul are avantajul că se pregăteşte repede, poate manevra greutăţi mari,
utilizează numai două vinciuri şi permite trecerea rapidă la un alt sistem de lucru mai
simplu.
10

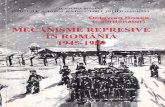
Figura nr. 1 BIGA DE MARFĂ
Elemente componente:
1. biga propriu-zisă
2. catargul (coloana bigii)
3. capătul inferior al bigii
4. capătul superior al bigii
5. articulaţia pentru mişcarea bigii în înălţime
6. articulaţia pentru mişcarea bigii în direcţie (bulon vertical)
7. palancul de balansină (balansina)
8. troliu de balansină (manevra bigii în înălţime şi fixarea la unghiul de înălţime θ)
9. gai şi contragai
10. palanc de gai şi contragai
11

11. armătura capătului superior al bigi
12. macaraua superioară a palancului de sarcină
13. cablu de sarcină
14. ganciul bigii (cârligul palancului de sarcină)
15. pastica de ghidare a cablului de sarcină
16. vinci de sarcină
17. cablu de siguranţă
18. placă triunghiulară
12

CAPITOLUL II
Stabilirea schemei cinematice. Descrierea diagramei de sarcină.
Alegerea sistemului de acţionare se face pe considerente economice în aşa fel încât
sistemul să fie simplu, robust la nivelul tehnicii actuale, economic şi să satisfacă toate
condiţiile impuse.
Dimensionarea şi alegerea elementelor componente din sistemul de acţionare
electromecanic comportă:
- dimensionarea şi alegerea elementelor mecanice din schema cinematică;
- alegerea motorului electric de acţionare; determinarea şi alegerea aparatajului
electric de comandă, de protecţie, de măsură, şi a dispozitivelor de siguranţă;
- elementele mecanice din schema cinematică se calculează în măsura în care
sunt necesare pentru a furniza datele cu privire la alegerea motorului electric şi
sistemului de acţionare electric.
2.1. Mecanismul de ridicare a sarcinii:
Mecanismul de prindere a sarcinii cuprinde dispozitivul de prindere, un lanţ de care
se fixează elementul de ghidare a cablului de tracţiune, tamburul pentru înfăşurarea
cablului, cuplajul dintre tambur şi reductor, reductorul cu roţi dinţate cilindrice,
cuplajul dintre electromotor şi reductor, electromotorul de acţionare şi frână
electomagnetică.
Elemente componente :
- Cablu de tracţiune;
- Roţi de ghidare;
- Tambur;
- Cuplaj cu bolţuri;
- Reductor;
- Cuplaj dinţat simplu;
- Motor electric;
- Frână electromagnetică.
13

2.2. Calculul transmisiei prin cablu:
La calculul transmisiei prin cablu se ţine seama de următorii factori:
- Condiţiile de funcţionare;
- Solicitările din cablu;
- Materialul cablului;
Condiţiile de funcţionare a transmisiei prin cablu sunt date conform STAS
466-79. Grupele de funcţionare ale mecanismului de ridicat sunt stabilite în funcţie de
3 factori:
- Clasa de utilizare;
- Starea de încărcare (solicitare);
- Starea de funcţionare.
Clasa de utilizare caracterizează timpul de funcţionare mediu Tz prevăzut
pentru mecanismul respectiv exprimat in ore.
Timpul de utilizare mediu zilnic Tz pentru un mecanism se determină luând
în considerare următoarele elemente:
- Numărul de cicluri pe zi, Nz;
- Numărul de cicluri pe oră pentru fiecare schimb, Nc1, Nc2, N3
- Timpul de funcţionare al mecanismului respectiv într-un ciclu tm [ore];
- Durata totală a ciclului, tc[ore];
- Nc1 = Nc2 = Nc3= 12 [cicluri / ora]
NZ = 8( Nci + Nc2 + Nc3) = 8 * 24 = 336 [cicluri / zi]
tm = 96,869 [s] = 0,026 [ore]
tc = 256,865 [s] = 0,071 [ore]
TZ = tm * NZ = 0,026 * 336 = 8,864 [ore]
Pentru a alege Tz = 8,864 se alege clasa de utilizare T7 căreia îi corespunde o durată
de serviciu de 25 000 ore de utilizare intensivă.
Din tabeul II STAS 4662 - 79 alegem starea de funcţionare 4 pentru condiţiile
de funcţionare cu solicitări inferioare.
2.3. Dispozitivul de prindere a sarcinii:Dispozitivul trebuie să permită o prindere rapidă şi sigură a sarcinii în
vederea realizării unei mari productivităţi şi siguranţă în funcţionare.
În acelaşi timp se urmăreşte ca greutatea proprie a dispozitivului să fie cât mai
mică fiind o sarcină inutilă.
14

Conform STAS 4662 - 79 pentru grupa de funcţionare M6 la sarcină nominală 3 tf
am ales modelul 11 al cârligului, din tabela l0 cu clasa de rezistenţă S.
Din STAS 1944 - 81 corespunzător numărului de model am ales un cârlig S 11 253 -
S unde notaţiile au următoarele semnificaţii:
- S, cârlig forjat simplu brut;
- 11, numărul modelului;
- 253, lungimea cârligului;
- S, clasa de rezistenţă a cârligului.
2.4. Calculul de alegere a lanţului:Se dimensionează diametrul zalei dz. Zala lanţului este solicitată la întindere,
încovoiere şi strivire.
Pentru uşurarea calculelor se neglijează atât efectul formei zalei cât şi neterminarea sa
statică interioară, amintind o repartiţie uniformă a formei de tracţiune pe secţiunea
transversală a celor două porţiuni rectilinii ale zalei.
Se alege un lanţ calibrat obişnuit la sarcina de 3 tf, conform STAS 7951 - 80 tip NS cu
dz= 22 mm, pasul p = 61 mm, lăţimea zalei b = 67 mm.
Lanţul este de tip NS 22 STAS 7951 - 80.
- Sarcina la deformare, 60 000 [N]
- Sarcina de rupere este de 160 000[N]
- Masa pe metru liniar, 8,2 (Kg / m]
- Lanţul are 4 zale
2.5. Calculul cablului de tracţiune:
Legătura cinematică între cârligul de agăţare a sarcinii şi tamburul de sarcină se
asigură prin intermediul cablului de tracţiune.
Se folosesc cabluri de oţel rotunde compuse, executate din sârmă de oţel mată cu sens
de înfaşurare Z / S fiind indicate în STAS 1689 - 80. Solicitările de rezistenţă la care sunt
supuse cablurile sunt:
- Solicitarea de întindere la ridicarea sarcinii;
- Solicitarea de încovoiere la înfăşurarea pe tambur;
- Solicitarea de tensiune datorată înfăşurării pe elice;
- Solicitarea suplimentară datorită frecării firelor unul de celalalt şi care se consideră
în calcule ca fiind un coeficient luat în calcule de solicitarea de încovoiere.
15

Cablul se alege pe baza solicitării de întindere. Se calculează o sarcină teoretică de
rupere la solicitarea de întindere.
Ftn = => Ft
n = = 2538,33[Kgf]
c = 4,5 coeficient de siguranţă la tracţiune pe tambur.
Pentru Ftn = 2538,33 Kgf se alege cablul SIL - 22 - 6 19 - 1760 Z / S conform STAS 1689-
80, unde notaţiile au următoarele semnificaţii:
- 22, diametrul in milimetri;
- 6, numărul de toroane;
- 19, numărul de fire;
- Z / S, numărul de înfăşurare a firelor în toroane şi al toroanelor în funie.
2.6. Determinarea elementelor principale ale tobei:În funcţie de diametrul ales pentru transmisia prin cablu, diametrul de înfaşurare al
cablului pe tambur se determină în conformitate cu cele prezentate la paragraful anterior.
Toba este de construcţie simplă, cu un cant elicoidal pe suprafaţa cilindrică, în care se
înfăşoară cablul de oţel.
Profilul canalelor în funcţie de diametrul cablului ales se determină după STAS 6979 -
72.
Dimensiunile canalelor sunt următoarele:
- Diametrul nom. cablu D = 22 mm;
- Raza = 12mm.;
- Pasul p = 24mm.;
- Înălţimea h = 7 mm.
Lungimea părţii canelate se determină astfel pentru tamburul pe care se înfăşoară o
singură ramură de cablu:
L = *p
- H = înălţimea de ridicare, H = 18mm.
- i = raportul de transmisie al mec. i = 1.
- D = diametrul tamburului, Dt = 0,45 m
- n1 = numărul de spire de siguranţă n = 2, n = 3
- n2 = numărul de spire necesar pentru prinderea cablului pe tambur n2 = 2-4 spire
- p = pasul, p = 0,024
16

L = *0,024 = 0,467[m]
Unghiul de înclinare al şanţului elicoidal este dat de relaţia:
tgβ = = 0,014
β = 0°45'
Tamburul se execută: construcţie turnată din oţel sau construcţie sudată din tablă O.L.
Tabla este supusă la o presiune exterioară uniform distribuită. Grosimea peretelui
tobei ce se execută se determină pe baza solicitărilor la compresiune transversală, deoarece la
tobele de dimensiuni obişnuite eforturile unitare datorate solicitării la tensiune şi încovoiere
sunt foarte mici în raport cu prima solicitare.
Grosimea peretelui se determină cu relaţia:
b = 0,02* D (6 ...10) mm
b = 0,02* 640(6... 10) =18,8mm
Se alege dimensiunea STAS b = 20 mm.
2.7. Alegerea cuplajului:
Cuplajul se alege în funcţie de efortul la care este supus pe durata solicitării precum şi
de natura acestuia.
Ţinând seama de acestea, am folosit un cuplaj dinţat STAS 6589 - 74. Aceste cuplaje
permit deplasări radiale mici, unghiulare şi axiale.
Deplasările axiale sunt de 2—8 mm.
Ca element de bază la alegerea cuplajului se consideră valoarea momentului rezistent
transmis.
Forma, dimensiunile, parametrii principali, materialele şi indicaţiile pentru alegerea
cuplajului se găsesc in STAS 6589 - 74.
Am ales cuplajul dinţat tip 3 model IPTCM cu momentul maxim de transmisie 3150
[Nm].
2.8. Reductorul:
Reductoarele folosite la maşinile de ridicat sunt de construcţie specială, din cauza
condiţiilor de funcţionare caracterizate printr-un număr mare de accelerări şi frânări a
corpurilor în mişcare şi din cauza condiţiilor de montare specifice într-un spaţiu cât mai redus,
pe părţile mobile ale macaralelor supuse la şocuri mecanice.
17

Reductorul se alege cunoscând puterea pe care trebuie să o transmită precum şi
regimul de funcţionare.
PS = [Kw]
În cazul macaralei puterea de transmisie se determină cu relaţia:
- (QN+q) = greutatea de ridicat in [KN];
- VN = viteza de ridicare in [m / s];
- ηt = Randamentul total al mecanismului.
Pentru un troliu in trei trepte cilindrice randamentul va fi:
η = η3red * ηtambur * ηcuplaj = 0,933 * 0,96 * 0,86 = 0,76
PS[3tf] =
Conform STAS 6850 - 69 am ales un reductor cilindric cu seria 3H1 - 001 cu
următoarel caracteristici:
- At = 610 mm, distanţa dintre arborele de intrare şi cel de ieşire;
- A1 = 160 mm, distanţa dintre primul şi al doilea arbore;
- A2 =200mm, distanţa dintre al doilea arbore şi al treilea arbore
- A3 = 250 mm, distanţa dintre al treilea şi ultimul arbore;
- Lmax = 1031 mm, lungimea totală a reductorului.
Reductorul este cu cumulare de viteză pe treapta a doua.
2.9. Rolele de egalizare şi ghidare:
Rolele pentru cablul de oţel se execută prin turnare din fontă sau
oţel.De asemenea se mai pot confecţiona prin sudare din platbandă de oţel.
La aceste role se deosebesc următoarele elemente:
a) obada care are la periferie un şanţ corespunzător cablului
b) butucul rolei care se roteşte liber pe un ax fix
c) discul circular de legătură
Raportul minim dintre diametrul de ghidare şi conducere a cablului în funcţie de
unghiul de înfăşurare trebuie să corespundă relaţiilor:
D/d = 25 pentru α = 5° 10°
D = 25mm, d = 22mm D = 25*22 = 550mm
18

CAPITOLUL III
Alegerea motorului electric de acţionare pentru mecanismul de ridicare.
3.1. Alegerea preliminară a motorului electric:
- Cuplul static la arborele motorului electric la ridicarea sacinii nominale: M1[
3tf] =
- Cuplul static la arborele motorului la coborârea sarcinii nominale:
M2[3tf] =
- Turaţia motorului electric pe treapta de turaţie ridicată necesară pentru asigurarea vitezei impuse de ridicarea sarcinii nominale:
n =
- Turaţia motorului electric pe treapta de turaţie coborâtă necesară pentru asigurarea
vitezei impuse de aşezarea sarcinii nominale:
na =
- Calculul puterii la ridicarea sarcinii nominale pe treapta de turaţie ridicată:
P1[Kw] =
- Calculul puterii la coborârea sarcinii nominale pe treapta de turaţie coborâtă:
P2 =
3.2. Alegerea motorului electric:
Se alege un motor electric de tip MAP 612—6/12/24 cu trei trepte de turaţie, cu
rotor în scurtcircuit având trei înfăşurări statorice distincte în conexiuni stea,
parametrii fiind indicaţi în următorul tabel:
19

Parametrii motorului electric Treapta I Treapta II Treapta I I I
Numărul de poli 24 12 16
Puterea nominală PN[ Kw] 5 16 32
Turaţia nominală [rot / min] 200 425 910
Curentul nominal IN [A] 51 59 70
Curentul de pornire Ip[A] 75 150 340
Cuplul critic Mk [Nm] 600 700 850
Cuplul de pornire Mp[Nm] 600 680 730
Randamentul nominal N [%] 34 66 79
Factorul de putere cos 0,44 0,62 0,88
Durata relativă de acţionare DA[%] 15 25 40
Momentul de volant GD* [Nmz] 70 70 70
Tensiunea nominală Un[V] 380 380 380
Conexiuni statorice
Gradul de protecţie IP56
TABELUL NR.1 : Parametrii motorului electric
3.3. Caracteristicile mecanice n = f (M):
Se calculează cuplul nominal al motorului pentru treapta a III-a de turaţie şi
se compară cu momentul static M1.
MN = 9550*
Trebuie îndeplinită condiţia:
MN > Mi
335,82[Nm] > 253, 5[Nm], deci condiţia este îndeplinită.
Alunecarea nominală:
Sn = unde n0 = turaţia de sincronism
n0 = unde
p = numărul de perechi de poli: p=3
SN =
Alunecarea critică:
SK = SN
20

Expresia analitică a caracteristicii mecanice naturale a motorului electric asincron
este de forma: M , unde
- M = cuplul dezvoltat de motor la arbore;
- MK = cuplul critic al motorului electric;
- S = alunecarea corespunzătoare cuplului M;
- SK = alunecarea critică a motorului electric.
n1 = n0 (1-S); S = 0; M = 0; n = n0 (1-S) = 1000[rot/min]
Pentru S = SN = 0,09 se calculează cuplul motorului M:
M =
n = n0 (1-S) = 1000 (1-0,09) = 910[rot/min].
Pentru S = 0,5 => n = 1000 (1-0,5) = 500[rot/min]
M =
Pentru S = 0,8 => n = 1000 (1-0,8) = 200[rot/min]
M=
Datele obţinute sunt prezentate centralizat în tabel.
Se trasează caracteristica mecanică naturală.
Pentru treapta a II-a de turaţie se obţin următoarele caracteristici:
MN = 9550*
n0 =
SK = SN2
SN2 =
Folosind relaţiile:
21

M = si n = n0 (1-S), rezultă tabelul nr. 3 şi caracteristica naturală mecanică 2.
Pentru treapta I de turaţie:
MN = 9550*
SN1 =
- Turaţia de sincronism: n0= (60 * f) / p = (60 * 50) / 12 = 250[rot/min]
- Alunecarea nominală : SN1 =
- Coeficientul de suprasarcină sau supraincărcare :
- Alunecarea critică:
SK = SN2
M = si n = n0 (1-S), rezultă tabelul 4 şi caracteristica mecanică naturală pentru
treapta I de viteză.
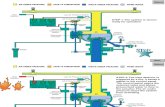
TABELUL NR.2: caracteristica mecanică naturală pentru treapta a III-a de turaţie
S [%] 0 910 10 20 43 50 60 70 80 90 100
n rot/min 1000 910 900 800 570 500 400 300 200 100 0
M [Nm] 0 340 375 650 850 840,4 804,9 758,1 708,9 661,2 616,9
TABELUL NR. 3: caracteristica mecanică naturală pentru treapta a II-a de turaţie
S [%] 0 10 15 20 30 40 54 60 70 80 90 100
n rot/min 500 450 425 400 350 300 230 200 150 100 50 0
M [Nm] 0 250,6 359,5 455,9 594,4 669,6 700 696,1 667 649,8 617,.8 585
TABELUL NR. 4: caracteristica mecanică naturală pentru treapta a I-a de turaţie S [%] 0 10 20 30 40 50 60 70 80 96 100
n rot/min 250 225 200 175 150 125 100 75 50 10 0
M [Nm] 0 123,6 238,7 341,6 426 491,8 540,5 571,2 590,2 600 599,.7
22

Figura nr. 2 Caracteristicile mecanice n = f (M)
CAPITOLUL IV
23

Calculul diagramei de sarcină pentru mecanismul de ridicare-
coborâre
4.1. Ridicarea sarcinii nominale:
Momentul de volant echivalent raportat la arborele motorului electric se obţine
folosind relaţia:
Jm= , unde:
Jm - momentul de inerţie al rotorului motorului;
Ωn - viteza unghiulară nominală [rad/s];
Vn - viteza liniară a corpului în mişcare de translaţie [m/s];
σ - coeficientul a cărui valoare depinde de i (raportul de transmisie al
reductorului);
m - masa corpului.
Pentru mecanisme cu i > 25, σ = 1,1 la 1,3; alegem σ
= 1,2 - cuplul dinamic de accelerare:
M1p = Mp - M1 = 326,498 [Nm]
- timpul de accelerare (pornire):
t1a = (GDe / 375)(n1 / M1d), unde:
GDe = σGDM +4g(QN+q)(VN/2πnN)2 =88,858[Nm2]
GDe = momentul de volant echivalent
t l a = (n1*GDe)/ (375*M1d) = 1,045 [s]
n1 = 1440 se citeşte din caracteristica mecanică naturală pentru M1 = 233,4[Nm]
- pierderile constante ale motorului:
PK = = 2,444[Kw]
- cuplul de frânare determinat de pierderile constante ale motorului:
MfM = 9550 (PK / n1), MfM = 16,211
[Nm]
- cuplul de frânare rezistent total:
M1f=M1 + Mf+MfM
24

M1f = 719,713 [Nm]
Mf = momentul de frânare introdus la acţiunea frânei electromagnetice de tip TMT - 62
- timpul de frânare la ridicarea sarcinii nominale în cazul decuplării motorului de la
reţea:
t1f = (GDe / 375)*(n1 / M1f) = 0,474 [s]
- viteza de regim staţionar la ridicarea sarcinii
nominale: V1 = (π DT n1) / i = 58,164 [m / min]
- înalţimea parcursă de sarcină la pornire şi
frânare: H1 = V1(t1a+t1f)/2*60 = 0,736[m]
- timpul de ridicare a sarcinii în regim
staţionar:
t1S = (H-H1)*60/V1 = 19,872[s]
- curentul absorbit de motor:
I1 = I 1 N * (M1 / MN) = 64,703 [A]
4.2. Coborârea cu frânare a sarcinii nominale:
Considerăm maşina funcţionând pe porţiunea liniară a caracteristicilor statice
naturale n = f (M), valabil în cazul sarcinilor aflate in limitele admise de puterea
motorului, turaţia de la care începe frânarea cu recuperare de energie va fi:
ne = n2 = n0 + (n0-nS)
Deci:
n2 = 2 n0 - nS = 2* 1500 - 1485 = 1515 [rot/min]
ns = 1485 [rot / min] se obţine din caracteristica mecanică naturală corespunzătoare
cuplului M = 131,821 [Nm]
- curentul debitat de maşină în regim de frânare cu recuperare de energie corespunzător
cuplului M va fi:
I2 = I 1 N * (M2 / MN) = 33,645 [A]
- timpul de accelerare de la turaţia no = 0 la n = n 2 la coborârea sarcinii nominale în
regim de frânare cu recuperare de energie este:
t2a = (GDe / 375 )* (n2/ (Mp+ M2) unde:
n2 = turaţia de la care începe frânarea
Mp = cuplul de pornire
25

GDe = momentul de volant echivalent
M2 = cuplul static la axul motoruiui la coborârea sarcinii
nominale t2a = 0,504 [s]
- cuplul de frânare la coborârea sarcinii cu maşina decuplată de la
reţea:
M2f = Mf + MfM - M2, unde:
M2f = cuplul rezistent introdus prin frâna electromagnetică
MfM = cuplul de frânare determinat de pierderile constante din motor
M2f = 334,39 [Nm]
- timpul de frânare la coborârea sarcinii cu maşina decuplată de la
reţea:
t2f = (GDe/ 375) * (n2 / M2f) = 1,074 [s]
- viteza de coborâre a sarcinii nominale:
V2 = (3,14* DT * n2) / i, unde:
n2= turaţia la care incepe frânarea
DT = diametrul tamburului
i = raportul de transmisie
V2 = (n* 0,64 * 1064) / 40 = 61,163 [m / min]
- înălţimea parcursă de sarcină la acceleraţie şi frânare:
H2 = V2*(t2a+t2f)*0,5/60 unde:
t2a = timpul de accelerare n = 0 la n = n2
t2f = timpul de coborâre a sarcinii cu maşina decuplată de la reţea
V2 = viteza de coborâre a sarcinii
H2 = 0,804 [m]
- timpul de coborâre a sarcinii în regim staţionar:
t2S= (H - H2)*60/V2 = 18,831 [s]
H = înălţimea de ridicare impusă
4.3. Ridicarea cârligului gol:
- Cuplul de sarcină la axul motorului:
M3 = (g*q*DT)/(2*i* )unde:
q = sarcina cârligului gol
g = acceleraţia gravitaţională
= coeficient; = 0,14
26

M3 = 24,775 [Nm]. Pentru cuplul M3 din n = f (M) => n3 = 1495 [rot / min]
- momentul de volant echivalent raportat la arborele motorului electric:
GDeo = σGDm, unde:
σ =1,1 1,3
GDm = momentul de volant al motorului
GDm=l,2*70 = 84[Nm2]
- cuplul dinamic de accelerare:
M3d = Mp -, unde:
Mp = cuplul de pornire
M3 = cuplul de sarcină la axul motorului la ridicarea cârligului
M3d = 555,225 [Nm]
- timpul de accelerare la ridicarea cârligului gol:
t3a = (GDe0/375 ) * (n3/ M3d) = 0,603 [s]
- cuplul de frânare:
M3f= M3 + Mf + MfM, unde:
Mf = cuplul rezistent introdus de frână
MfM = cuplul de frânare determinat de pierderile constante de motor
M3 = cuplul de sarcină la axul motorului
M3f = 490,986 [Nm]
- timpul de frânare la ridicarea cârligului gol:
t3f = (GDeo / 375 ) * (n3 / M3f), unde:
M3f = cuplul de frânare total
GDeo = momentul de volant echivalent
t3f = 0,682 [s]
- viteza de ridicare a cârligului:
V3 = (3,14* DT * n3) / i
V3= (71*0,45*1495) / 35 = 61,163 [m/min]
- înalţimea parcursă de cârligul gol la accelerare şi frânare:
H3 = V3*(t3a + t3f ) / 2*60 = 0,647 [m]
- timpul de ridicare a cârligului gol în regim staţionar:
t3S= (H - H3)*60 / V = 19,23 [s]
- curentul absorbit de motor la ridicarea cârligului gol:
27

I3 = IN => I3 = 2,403[A], unde:
- SK = alunecarea critică
- S3 = alunecarea corespunzatoare cuplului de sarcină
S3 = (n0 - n3) / n0 = 0,003
M3 = 24,775[Nm]
La sarcini mici nu mai poate fi admisă proporţionalitatea dintre curent şi cuplu.
4.4. Coborârea in forţă a cârligului gol - cuplul de sarcină la arborele motorului electric
M4 = => M4 = 17,838[Nm]
= coeficientul calculat la paragraful anterior
Cuplului de sarcina M4 îi corespunde turaţia n4 = 1496 [rot/min] din caracteristica
mecanică naturală n = f (M).
- cuplul dinamic de accelerare:
M4d = MP - M4, unde: M4 = cuplul de pornire
M4d = 562,162 [Nm]
Semnul minus indică necesitatea coborârii în forţă a cârligului gol.
- timpul de accelerare la coborârea cârligului gol:
t4a = (GDeo / 375) * (n 4 / M4d)
t4a = 0,596 [s]
- cuplul de frânare total:
M4f = M4+M fM+M f
M4f = 484,05 [Nm]
- timpul de frânare la coborârea cârligului gol în cazul deconectării motorului de la
reţea:
t4f =(GDeo/375)*(n4/M4f)
t4f = 0,692 [s]
- viteza de coborâre a cârligului gol:
V4=( * DT* n4)/i
28

V4= (3,14*0,45*1496)/35 = 60,396[m/min]
- înălţimea parcursa de cârligul gol la accelerare şi frânare:
H4 = V4*(t4a+t4f) = 60,496*60*(0,596 + 0,692) = 0,648 [m]
- timpul de coborâre a cârligului gol în regim staţionar:
t4S = (H -H4)*60 = 19,225 [s]
- curentul absorbit de motor la ridicarea cârligului gol:
I4 = I1N = 1,922[A]
S4 = alunecarea corespunzătoare a cuplului M4, S4 = 0,002.
Centralizăm datele în tabelul următor:
TABELUL Nr. 5 Regimul de lucru
REGIM DE LUCRU CURENT (A) TIMP (s) Ridicarea sarcinii nominale
Accelerare IP = 410 t1a=1,045 Regim staţionar I1 =64,703 t1S=19,872 Frânare - t1f =0,474 Deplasarea pe orizontală a sarcinii - to1 = 20
Coborârea cu frânare a sarcinii nominale Accelerare IP = 410 t2a = 0,504 Regim staţionar I2 = 33,645 t2S= 18,831 Frânare - t2f = 1,074 Eliberarea cârligului - to2 = 60
Ridicarea cârligului gol Accelerare IP = 410 t3a = 0,603 Regim staţionar I3=2,403 t3S= 19,23 Frânare - t3f= 0,682 Deplasarea pe orizontală a cârligului gol - to3 = 20
Coborârea forţată a cârligului gol Accelerare IP = 410 t4a= 0,596 Regim staţionar I4 = 1.922 t4S = 19,225 Frânare - t4f =0.692 Agăţarea sarcinii la cârlig - to4 = 60
29

4.5. Verificarea motorului ales din punct de vedere al productivităţii:
- durata unui ciclu:
t1 = t 1 a + t1s + t l f = 21,391 [s]
t2 = t2a + t2s + t2f = 20,409 [s]
t3 = t3a + t3s + t3f = 20,515 [s]
t4 = t4a + t4s + t4f = 20,513 [s]
A = t1 + t2 + t3 + t4 = 82,827 [s]
Folosind datele din tabel se obţine:
B = to1 + to2 + to3 + to4 = 160[s]
tC = A + B = 242,827
- numărul de cicluri într-o oră:
ZC = 3600/ tC = 3600/242,827 = 14,825 [cicluri / h]
ZC > Z, Z = 12[cicluri/h]
Deci motorul corespunde din punct de vedere al productivităţii.
4.6. Verificarea motorului electric la încălzire:
- durata relativă de acţionare reală:
DAr = => DAr = 32,906[%]
- calculul curentului echivalent:
Ie=
Ie = 55,21[A]
- calculul curentului nominal conectat corespunzător duratei reale de funcţionare:
INC = ; unde: ; DAn = 0,4; DAr1 = 0,35; INS = 70[A] =>
=> INC = 69,595[A]
Se verifică relaţia :
Ie = 55,21[A] < INC = 69,595[A]
CAPITOLUL V
30

Calculul regimului tranzitoriu electromecanic
Pentru a regla în mod riguros timpii de acţionare ai protecţiilor este necesar
să determinăm timpii regimului tranzitoriu de pornire şi oprire ai sistemului de acţionare
electrică. În acest scop este necesar să determinam momentul de volant al motoruiui electric
GD2ME = 70 [Nm2] dat în caracteristicile motorului.
5.1. Determinarea momentului de volant al sistemului de acţionare electric al
mecanismului de ridicare - coborâre cârlig:
Acţionările navale au un moment de volant de:
GD2Mact = (2 5) GD2
ME
GD2Mact = 3*70 = 210 [Nm2]
5.2. Determinarea constantei de timp pentru cele trei trepte de viteză:
Treapta I
Tact =
n0 = turaţia de sincronism pe treapta I
MKI = cuplu maxim pe treapta I al motorului, no = 250 [rot / min] ; MKI = 600 [Nm]
Treapta II
Tact =
n0II = turaţia de sincronism pe treapta II
MKII = cuplul maxim pe treapta a II-a al motorului
noII = 500 [rot/min]; MKII = 700 [Nm]
Treapta III
Tact =
noIII = turaţia de sincronism pe treapta III
MKIII = cuplul maxim pe treapta a III-a al motorului
noIII = 1000 [rot/min]; MKIII = 850 [Nm]
5.3. Determinarea timpilor de pornire:
31

TP =
Treapta I
TPI =
Treapta II
TPII =
Treapta III
TPIII =
5.4. Calculul timpilor de frânare:
Tf =
Treapta I
Tf1 =
Treapta II
Tf2 =
Treapta III
Tf3 =
CAPITOLUL VI
32

Stabilirea schemei electrice a sistemului de acţionare a instalaţiei de
ridicare – coborâre sarcină
6.1. Date tehnice:
Echipamentul este destinat unui vinci de marfă prevăzut cu motor cu trei trepte de
viteză având bobinaje pentru fiecare treaptă de viteză.
Instalaţia electrică de forţă a macaralei se alimentează cu curent alternativ 380 V / 50 Hz.
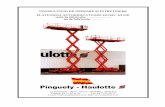
Am ales schema de acţionare electrică prezentată în figura nr.l, schemă ce
asigură următorul algoritm funcţional:
a) pornirea motorului : pe treapta I,II,III;
b) pornirea motorului pe treapta a III-a de viteză cu trecere ulterioară pe
treapta I si a II-a de viteză la trecerea controlerului brusc din poziţia "0" in poziţia III-
a;
c) reversibilitatea motorului electric de acţionare m;
d) frânarea mecanică cu ajutorul frânei electomagnetice;
e) frânarea electrică (frânarea suprasincron sau cu recuperare de energie);
f) protecţiile motorului electric de acţionare:
- protecţia de scurtcircuit a circuitului de forţă realizată cu întrerupător automat
T.P.D.
- protecţia la suprasarcină a motorului electric realizată cu releele termice 1et,2et,3et .
6.2. Elementele componente ale schemei:
m - motor electric de acţionare;
A – întrerupător automat;
B1,B2 – limitatoare de sarcină;
B3 – limitator;
C1,C2 – contactoare de sens;
C3,C4,C5 – contactoare pentru treapta de viteză mică,medie, mare;
C6 – contactor de frână;
D – punte redresoare;
D1 – redresor;
F – frână electrică;
K0 – K14 - contactele controlerului de comandă;
33

R1,R2 – rezistenţe de limitare;
R3 – rezistenţă reglabilă de limitare a curentului prin bobina frânei F;
R4 – R11 – rezistenţe la încalzire;
RC – grup protecţie punte redresoare;
R12,C1 – grup protecţie diode n1;
d1,d2 – relee temporizate de accelerare;
d3 – releu temporizat intermediar;
d4 – releu temporizat de tensiune mică;
d5,d6 – relee temporizate de frânare;
d7 – releu temporizat de accelerare în treapta a III-a de turaţie;
d8 – releu de curent ale cărui contacte şuntează rezistenţa de limitare a bobinei frânei in
perioada de eliberare a frânei;
et1, et2 , et3, et4, et5 – relee termice;
6.3. Principiul de funcţionare al schemei:
Se cuplează întrerupătorul automat din T.P.D.
Controlerul fiind in poziţia "0" contactele Controlerul se află pe poziţia “0”:
contactele controlerului K3 [1], K7 [6], K8 [7], K14 [16] sunt închise. În acest moment
schema de comandă în c.a. nu este alimentată. Prin punea redresoarelor “n” se alimentează
in c.c. partea de comandă cu relee. Sunt alimentate bobinele releelor: d2 care îşi închide
contactul din linia [6] şi îl deschide pe cel din linia [8]; d1 care îşi deschide contactul din
linia [9] şi il închide pe cel din linia [8]; d3 îşi deschide contactul din linia [5] şi îl închide
pe cel din linia [17], [12-13]; d4 îşi închide contactul din linia [2] şuntând contactul
controlerului K3; d7 îşi inchide contactul din linia [17], [10-9], permiţând alimentarea
releului d4 şi îşi deschide contactul din linia [10].
Se comută controlerul pe poziţia “1” (VIRA): în acest caz se închid contactele
controlerului K7 [6], K8 [7], K14 [16]; odată cu închiderea acestor contacte K6 [3], B1 ,
C2 , [3] se alimentează bobina contactorului de sens (VIRA) C1 [3]; contactorul C1 îşi
închide contactele din liniile [9-10], [3] şi îşi deschide contactele din linia [4] (contact de
interblocare) şi din linia [13] întrerupând alimentarea bobinei releului d1; releul d1 îşi
închide temporizat contactul din linia [9], şi îl deschide pe cel din linia [7]; este pusă sub
tensiune bobina contactorului de frână C6 care alimentează bobina frânei
electromagnetice, care alimentează eliberând în acelaşi moment frâna şi îşi deschide
contactele din linia [14] şi [17].
34

Bobina releului d3 îşi pierde alimentarea şi contactul din linia [5] revine la poziţia
iniţială cu temporizare, contactul din linia [17], [13-12] se deschide tot cu temporizare.
Bobina releului d7 îşi pierde alimentarea dar nu îşi modifică poziŃia
contactelor deoarece C3 primeşte alimentarea şi îşi închide contactul din linia [18], releul
primind din nou alimentare.
Contactorul C3 este alimentat prin contactele K6, C1 [3], d3 [5], d2, K7 [6], d6,
C4 , C5 [7].Contactorul C3 îşi închide contactul [18], îşi deschide contactele [14], [8] din
circuitul de comandă şi îşi închide contactele din circuitul de forŃă, motorul pornind pe
treapta I-a de viteză. Releul d4 îşi păstrează alimentarea prin C3 [18], d7 , d5 , K14
[16].
La trecerea de pe poziţia “1”-“2” sunt închise contactele controlerului K7 [6], K10
[9], care pregătesc funcţionarea pe treapta a II-a.
Se comută controlerul pe poziţia “2” (VIRA).
Se închid contactele controlerului K6 [3], K13 [5], K8 [7], K10 [9], K14
[16]. Bobina contactorului C3 îşi pierde alimentarea, contactul din linia [8] revine la
poziţia iniţială şi contactorul C4 primeşte alimentare prin d1 , K10 [9], C3 [8], motorul
trece pe cea de a II-a treaptă de turaţie prin închiderea contactului contactorului C4 din
circuitul de forţă.
Contactorul C4 îşi închide contactul de pe linia [18] alimentând releul d5 care
îşi închide contactul de pe linia [18-17] realizând alimentarea bobinei releului d4 în
continuare.
Releul d3 îşi închide contactul între bornele [13-15] din linia [5-4] şi contactul de
pe linia [10].
Releul d7 la trecerea pe cea de-a doua treaptă de turaţie îşi pierde
alimentarea şi îşi deschide contactul de pe linia [17], [10-9], şi îşi închide contactul
de pe linia [10] pregătind astfel alimentarea bobinei contactorului C5.
La trecerea de pe poziţia “2”-“3” a controlerului sunt închise contactele K10 [9],
K12[11] care realizează aceasta trecere intermediară.
Se comută controlerul pe poziŃia “3” (VIRA).
Se închid contactele controlerului: K6 [3], K13 [5], K8 [7], K12 [11]. Bobina
contactorului C4 îşi pierde alimentarea şi astfel bobina contactorului C5 primeşte
alimentare prin d1 [9], C4 [9-11], K12 [11], d7 ,d5 , C4 [10], C3 [8]. Contactorul C4
îşi deschide contactele [5], [18,] îşi închide contactul [7], [10] şi îşi închide contactele de
forţă.
35

Contactorul C5 îşi închide contactul [19] alimentând releul d6 care îşi închide
contactul din linia [18-19] care păstrează alimentarea releului d5 şi contactele din
circuitul de forţă se închid pe treapta a III-a de turaţie.
La trecerea lentă a controlerului de pe poziţia “3” pe poziţia “0” procesul se
derulează în ordine inversă.
Trecerea bruscă a controlerului de pe poziţia “0” pe poziţia “3”.
Controlerul se află pe poziţia “0” (VIRA)
Sunt alimentate releele d1, d2, d3, d4, d7 care îşi modifica poziţia
contactelor.
Se trece brusc controlerul pe poziţia “3” (VIRA).
Se închid contactele controlerului: K6 [3], K13 [5], K8 [7], K12 [11], K14 [16].
Prin K6, B1, C2 [3] se alimentează bobina contactorului de sens C1 (VIRA). Acest
contactor îşi închide contactele din liniile [3],[9-11]. Prin C1 [3], K13 [5] se
alimentează bobina contactorului de frână C6 care îşi deschide contactul [14] scoţând de
sub tensiune releul d3 care îşi închide cu temporizare contactul din linia [5]. Bobina
releului d1 îşi pierde alimentarea prin deschiderea contactului C1 [13].
În acest moment este alimentat contactorul C4 prin: d1 [9], C1 [9-11], K12 [11],
d7 [9-10], C5, C3 [8], motorul este pornit direct pe treapta a II-a de turaţie. Bobina
releul d7 îşi pierde alimentarea odată cu deschiderea contactului C6 [17]. Diferenţa
dintre temporizările celor două relee o constituie timpul de funcţionare pe treapta a
II-a. Prin închiderea contactului C4 [18], se alimentează bobina releului d5 care îşi
închide contactele d5 [10], [17-18], [5-4] şi deschide d5 [17].
După terminarea temporizării bobina releului d7 îşi pierde alimentarea, se deschide
contactul d7 [10-9] şi se închide d7 [10] şi alimentează bobina contactorului C5.
Prin închiderea lui C5 [19] se alimentează releul d6 care îşi închide contactul d6
[19-18] menţinând bobina releului d5 sub tensiune.
Motorul funcţionează pe treapta a III-a de turaţie.
Trecerea bruscă a controlerului de pe poziţia “3” pe poziţia “0” (VIRA)
(frânare suprasincronă).
Motorul funcŃionează pe poziţia “3” (VIRA). Se închid contactele
controlerului: K3 [1], K7 [6] si K8 [7].
Bobina contactorului de sens C1 îşi pierde alimentarea şi contactele sale revin
la poziţia iniţială. Alimentarea schemei de comandă în curent alternativ se păstrează
prin contactul releului d5 [5-4]. Bobina releului d1 se alimentează şi îşi închide
36

contactul de pe linia [7]. Bobina contactorului C5 îşi pierde alimentarea şi contactele
sale revin la poziţia iniţială, după care prin deschiderea contactului C5 [19] bobina
releului d6 îşi pierde alimentarea dar contactele îşi păstrează poziţia până la
terminarea temporizării. În acest moment după revenirea contactelor contactorului C5 se
alimentează bobina contactorului C4 prin: d2 , K7 [6], d6 [8-7], C5 [8]. Motorul
funcţionează pe treapta a II-a cat timp releul d6 realizează temporizarea. După
terminarea temporizării releului d6 acesta îşi deschide contactul d6 [7-8] şi scoate de
sub tensiune bobina contactorului C4 care închide contactul [7] şi motorul trece pe
prima treapta de turaţie.
Contactorul C4 îşi mai deschide şi contactul [18] scoţând de sub tensiune
bobina releului d5 care îşi începe temporizarea contactelor, mai deschide contactul [5]
întrerupând alimentarea bobinei contactorului de frână care îşi închide contactele [14],
[17] începând frânarea mecanică. După terminarea temporizării releului d5 schema de
comandă în curent alternativ îşi pierde alimentarea, bobina contactorului C3 îşi pierde
alimentarea, bobina releului d3 primeşte din nou alimentare alimentând bobina releului d7
şi deschizându-şi contactul de pe linia [5].
Acţionarea protecţiei.
În cazul apariţiei unor scurtcircuite întreruptorul automat decuplează imediat
alimentarea cu tensiune a schemelor de forţă si comandă. În cazul apariţiei unei
suprasarcini pe orice treapta de turaţie releele termice aflate în schema de comandă şi
forţă sesizează şi îşi deschid contactele [12-17] întrerupând alimentarea bobinei
releului d4 (prezenta tensiune) care îşi deschide temporizat contactul de pe linia
[2] întrerupând alimentarea întregii scheme de comandă şi motorul este frânat
mecanic. O nouă pornire este posibilă numai după anularea suprasarcinii prin apăsarea
butonului de anulare a zăvorârii mecanice a bimetalelor releului termic. În cazul
apariţiei unor anomalii operatorul are la îndemână butonul B3 făcându-se astfel posibilă
o întrerupere rapidă fără a mai acţiona controlerul. Limitatoarele B1 şi B2 întrerup
alimentarea schemei atunci când cârligul ajunge la poziţie maximă(sus) sau (jos).
37

Figura nr. 3 Schema electrică de acţionare a mecanismului de ridicare-coborâre
38

CAPITOLUL VII
Calculul de alegere al aparatelor de comandă şi protecţie.
7.l. Alegerea contactoarelor de viteză c3, c4, c5:
Vom folosi regimul de funcţionare AC = 3 utilizat la pornirea motoarelor cu rotorul în
scurtcircuit, reversarea şi oprirea în plin mers a acestora.Pentru treapta de turaţie mică -
contactorul c3
IN = 51A IP=75A
Aleg contactorul de curent alternativ tip T.C.A. —63 A cu următoarele caracteristici:
Pentru contactele principale avem:
- tensiune nominală 500V
- curent nominal 63 A
- frecvenţa reţelei 50 Hz
- tensiunea nominală 380 V
- curent nominal 2V
- puterea absorbită de bobină: inchisă 25 VA; deschisă 200 VA
- tensiunea de serviciu 380 V
- durata de viaţă mecanică 5.000.000 manevre
- durata de acţionare 100%
- curent de conectare 378 A
- curent de rupere 63 A
- tensiunea de lucru 380 V
- frecvenţa de conectare 300 con /h
- durata de conectare 40%
Pentru contactele auxiliare avem:
- durata de viaţă electrică 1.000.000 manevre
- curent de conectare 18 A
- curent de rupere 2 A
- tensiunea de lucru 380 V
- frecvenţa reţelei 50Hz
39

- puterea absorbită închis – 10 VA şi deschis – 100 VA
- frecvenţa de conectare 600 con / h
- tip de protecţie IP 000
- masa 155Kg.
- Contactoare de legătură:
- principale: minim lOmm2; maxim 16mm2
- auxiliare: minim l mm'; maxim 2,5 mm"
Pentru treapta de turaţie medie - contactorul c4:
IN = 59A IP=150A
Aleg contactor de curent alternativ tip T.G.A. 63 A cu aceleaşi caracteristici
prezentate precedent.
Pentru treapta de turaţie mare - contactorul c5:
IN = 70[A]
IN = 70 A IP = 340A IP / IN < 6
Aleg contactor de curent alternativ tip T.C.A. 125 A cu următoarele caracteristici:
- tensiune nominală 500V
- curent nominal 125 A
- frecvenţa relelei 50 Hz
- tensiunea nominală 380 V
- curent nominal 2A
- puterea absorbită de bobină: inchisă 100 VA; deschisă 750 VA
- tensiunea de serviciu 380 V
- durata de viaţă mecanică 5.000.000 manevre, durata de acţionare 100%
Pentru contactele principale avem:
- curent de conectare 660 A
- curent de rupere 125 A
- frecvenţa de conectare 120 con / h
- durata de conectare 40%
40

Pentru contactele auxiliare avem:
- durata de viaţă electrică l .000.000 manevre
- curent de conectare 18 A
- curent de rupere 2 A
- tensiunea de lucru 380 V
- frecvenţa de conectare 120 con / h
- tip de protecţie IP 000
- masa 5,2 Kg.
- principale minim 16 mm2 ; maxim 25 mm2
- auxiliare minim l mm2; maxim 2,5 mm2
Conform STAS 4479 -67.
Contactoare de legătură:
7.2. Alegerea contactoarelor de sens c1 şi c2:
Se aleg în funcţie de curentul nominal al motorului şi de curentul de pornire la cea
mai mare putere utilă la arbore.
În cazul nostru se aleg pentru treapta a III - a:
IN=70A IP = 340A IP/IN<6
=> curentul echivalent de alegere este egal cu curentul
nominal pe treapta a III - a
Aleg pentru c1 şi c2 contactorii de curent alternativ tip T.O.A. 125 A
următoarele caracteristici:
Pentru contactele principale:
- tensiunea nominală UN = 500 V;
- curentul nominal: IN = 125 A;
- frecvenţa reţelei: f = 50 Hz;
- curentul de conectare: 660 A;
- curentul de rupere: 125 A;
- frecvenţa conectărilor: 125 conectări / oră;
- durata de conectare: 40%;
- durata de viaţă mecanică 5.000.000 manevre;
41

Pentru contactele auxiliare:
- tensiunea de lucru: 380 V;
- curentul de conectare: 18 A;
- curentul de rupere: 2 A;
- durata de viaţă mecanică: 1.000.000 manevre;
Bobina contactorului:
- tensiunea de serviciu: 380 V;
- frecvenŃa reŃelei: 50 HZ;
- puterea absorbită: închis 100 VA şi deschis 750 VA;
- tipul de protecţie: IP000;
- diametrul conductoarelor de legătură:
pentru contactele principale, min. 16 mm2 – max. 25 mm2
pentru contactele auxiliare, min. 1 mm2 – max. 2,5mm2;
- puterea motorului acţionat: 55 KW.
7.3. Alegerea contactorului de frână C6:
Curentul mediu absorbit de frână este IF = 6 A pentru frână încorporată tip T.M.T. -4.
Curent de conectare Ic = 8,4 A.
Alegem contactor de curent alternativ tip T.C.A. - 10 cu următoarele caracteristici:
- tensiune nominală 500V contacte principale
- curent nominal l0 A
- tensiunea nominală 380 V contacte auxiliare
- curent nominal 6A
- puterea absorbită de bobină: inchisă 17 VA; deschisă 55 VA
- durata de viaţă mecanică l .000.000 manevre
- durata de acţionare 100%
- curent de conectare 66 A
- curent de rupere 0,35 A
- tip de protecţie IP 000
- masa 0,58 Kg.
conductoare de legătură: auxiliare minim l mm2; maxim 2,5 mm2
42

7.4. Alegerea releeului intermediar d3:
Este destinat realizării diferitelor conexiuni în schema de comandă în cazul în care
contactele auxiliare ale contactelor principale sunt suficiente la număr.
Se aleg în funcţie de tensiunea de alimentare a schemei de comandă şi de curentul prin
contactele acestora. Pentru d3 alegem releu intermediar de curent alternativ tip R13 cu
următoarele caracteristici:
- tensiunea de serviciu 12, 24,48,110, 220, 380 V 50Hz;
- frecvenţa reţelei 50 Hz;
- puterea absorbită: închisă 16 VA; deschisă 30 VA;
- durata de viată mecanică l .000.000 manevre ;
- durata de conectare 100%;
- curent de conectare 5 A;
- curent de deconectare 5 A;
- tip de protecţie IP 000;
- masa 0,7 Kg;
- factorul de putere cos 0,5;
7.5. Alegerea releului de tip d7:
Acestea realizează trecerea temporizată pe treapta a III-a
Timpii de acţionare sunt reglaţi la valorile calculate la regimul tranzitoriu
electromagnetic.
Se aleg în funcţie de tensiunea de alimentare a schemei de comandă, de timpii de
acţionare ceruţi şi de curentul prin contacte:
Pentru releul d7:UN = 380V
Curentul cerut de contactorul c4:
Alegem releul temporizat la acţionarea de tip Rl 3T cu caracteristicile:
- tensiunea de serviciu: 12, 24, 48,110,125, 220, 380, 500 V;
- frecvenţa de serviciu 50 Hz;
- puterea absorbită: deschisă - 30 VA; inchisă - 16 VA;
- durata de viată mecanică l .000.000 manevre;
- durata de viată electrică l .000.000 manevre;
- factorul de putere cos 0,5;
- curentul de conectare 20 A;
- curentul de deconectare 5 A;
43

- tensiunea de lucru 220 V;
- frecvenţa de conectare 1 200 con / h;
- durata de conectare 100%;
- tipul de protecţie IP 300;
- poziţia de funcţionare verticală;
- masa 1Kg;
7.6. Alegerea releului minimal de tensiune d4:
Se utilizează pentru protecţia instalaţiilor electrice, acţionând când mărimea controlată
scade sub valoarea minimă. Pentru o tensiune a relaţiei de 380 V valoarea minimă acceptată
este de 320 V. Am ales releul minimal de tensiune RT 2 cu următoarele caracteristici:
- tensiunea de serviciu: 320V;
- frecvenţa reţelei 50 Hz;
- puterea absorbită: 2 VA;
- durata de viaţă mecanică 500 manevre;
- durata de viaţă electrică 500 manevre;
- factorul de putere cos 0,4;
- curentul de conectare 1A;
- curentul de deconectare l A;
- tensiunea de lucru 220;
- frecvenţa de conectare 1200 con/h ;
- durata de conectare 100%;
- timpul de acţionare 150 ms la 0,8 U reglat;
- tipul de protecţie IP 300;
- poziţia de funcţionare verticală ;
- masa l,5Kg.
7.7. Alegerea controlerului de comandă:
Pentru realizarea celor 6 regimuri de funcţionare este necesar un controler cu 3-0-3
poziţii şi cel puţin 5 contacte cu diagrama prezentată în schema de comandă.
Curentul prin contacte are o valoare maximă de 1,5 A.
Tensiunea nominală a controlerului este de 380 V. Am ales pentru comanda
motorului un controler pentru circuite auxiliare curent alternativ cu următoarea diagramă a
contactelor:
44

TABELUL Nr.6 Diagrama contactelor
Poziţia de acţionare Stânga 0 Dreapta
3 2 1 1 2 3 Poziţia contactelor
X X X X X X X
. X X X X X X X X X X X X
Controlerul este de tip CM 3 cu 3-0-3 poziţii cu următoarele caracteristici:
- tensiunea nominală: 500 V;
- curentul nominal l0 A;
- durata de viaţă mecanică 1.000.000 manevre;
- durata de viaţă electrică 100.000 manevre;
- factorul de putere 0,8 - 0,2;
- curentul de conectare l0 -6 A ;
- curentul de deconectare l0 - 6 A ;
- tensiunea de lucru 500 V;
- frecvenţa de conectare 600 con / h ;
- factorul de putere cos 0,8 - 0,2 ;
- curentul de conectare 12,5 - 7,5 A;
- curentul de deconectare 12,5 - 7,5 A;
- tipul de protecţie IP 300;
- conductoare de legătură minim l mm2; maxim 2,5 mm2
- masa 21 Kg.
7.8. Alegerea siguranţelor fuzibile:
Sunt folosite prontru protecţia circuitului de comandă.
45

Se dimensionează în funcţie de curentul maxim absorbit pe cele trei trepte de
funcţionare de către aparatele de comutaţie.
Pentru treapta a III-a funcţionează:
Iabsorbit= Idl+Id8+Id3+Ic2+Ic5+Ic7=2,002+0,25+0,25+0,8+0,8+0,8=3A
Alegem siguranţe fuzibile cod 4001 de 6A / 380 V.
Curentul nominal termic 6 A.
Curentul maxim la 380 V; 25 A
7.9. Alegerea întrerupătorului automat:
Se face în funcţie de curentul maxim cerut de cele trei scheme pe care le
aliniază: I max c = 70+5+2(39+5)= 163 A
I max c = I ridicare + I basculare + I rotire.
Curentul nominal al întrerupătorului automat este cel mai mare curent aproximativ în
valori efective sub care întrerupatorul automat poate funcţiona în regim permanent fără ca
limitele admisibile de încălzire să fie depăşite.
Curentul de rupere al întrerupătorului automat este cel mai mare curent de scurtcircuit
pe care întrerupătorul îl poate rupe în condiţii normale.
Curentul de închidere al unui întrerupător automat se exprimă prin curentul pe care
acest întrerupător îl poate stabili sub o tensiune dată în condiţii de exploatare prescrise.
Pentru curentul maxim cerut, de 163 A, alegem un întrerupator automat tip USOL 250
A cu următoarele caracteristici:
- tensiune nominală 500V
- curent nominal 250 A
- tensiunea nominală 500 V
- curent nominal 6A
Capacitatea de rupere a contactelor auxiliare:
- tensiunea de lucru 550 V
- curent de conectare 22,5 A
- curent de deconectare 7,5 A
- factorul de putere cos 0,35
- tip de protecţie IP 000
Capacitatea de rupere a contactelor principale:
- tensiunea de lucru 550 V
46

- curent de serviciu 250 A
- curent de conectare 20.000 A
- curent de deconectare 10.000 A
- factorul de putere cos 0,3
- timp de rupere 10-15 secunde
Cabluri de legătură la borne:
- contacte principale minim 50 mm2; max 120 mm2
- contacte auxiliare minim 0,75 mm2; max l ,5 mm2
- tensiunea de serviciu a releelor de minimă tensiune 380V
- limitele de reglaj a releelor termice la 45° 0,8 — l Is.
7.10. Alegerea releelor termice:
Releele termice cu bimetal se utilizează pentru protecţia motoarelor electrice
împotriva suprasarcinilor. Nu acţionează imediat ce curentul creşte ci după o anumită
perioadă de timp invers proporţională cu curentul. Se folosesc pentru protecţia
instalaţiilor complexe de automatizare.
Pentru treapta I releul termic 1et :
IN = 51 A
Alegem releul termic TSA 63, Irt = 0,35 INT Irt = curentul limită reglat termic
INT = curent nominal al releului termic
Pentru treapta a II-a releul termic 2et:
IN = 59 A
Alegem releul termic TSA 63, Irt = 0,9 INT
Pentru treapta a III-a releul termic 3et:
IN = 70 A
Alegem releul termic TSAW 400, ISERVICIU = 80 A
Irt = 0,9ISERVICIU = 72A
CAPITOLUL VIII
47

Tehnologia întreţinerii şi reparării sistemului de acţionare electrică
8.1. Reparaţii şi revizii:
Pentru a preveni uzura şi a asigura o durată mai mare de serviciu, maşinile şi
echipamentele electrice sunt supuse sistemului de control şi reparaţii planificate.
Repararea echipamentelor electrice se poate efectua după următorul sistem:
- Sistemul de reparaţii executate după necesitate constă în efectuarea lucrărilor de
reparaţii a maşinilor şi echipamentelor electrice atunci când acestea ajung în starea în
care nu mai pot fi menţinute în exploatare. Are dezavantajul că permite ieşirea bruscă
din exploatare a maşinilor electrice.
- Sistemul de reparaţii cu planificare rigidă consta în scoaterea obligatorie din
funcţiune a maşinilor electrice pentru executarea reparaţiilor la anumite perioade stabilite
indiferent de starea tehnică, precum şi repararea sau înlocuirea pieselor, ansamblelor
stabilite în funcţie de normele de uzură specifice maşinilor electrice ce lucrează în instalaţia
respectivă. Acest sistem este simplu atât în ceea ce priveşte organizarea cât şi ca pregătire şi
planificare a lucrărilor de reparaţii. Este dezavantajos pentru că se înlocuiesc şi elemente
care nu ar trebui înlocuite făcându-se astfel risipa de materiale.
- Sistemul de reparaţii executate după controlul stării maşinii electrice se bazează pe
rezultatele controlului periodic a stării maşinii electrice în timpul exploatării. La acest
sistem, nu se planifică reparaţiile ci numai controlul stării şi funcţionarii echipamentului.
Dacă la control se constată o uzură avansată a acestuia ce are ca efect scoaterea din
funcţiune a utilajului atunci se recurge la executarea reparaţiei respective. Pe baza datelor de
control se planifică volumul, durata reparaţiei, se pregătesc piesele de schimb şi materialele
necesare.
Sistemul preventiv de reparaţii periodice planificate se caracterizează prin faptul că
reparaţiile se execută planificat după un anumit număr de ore de funcţionare a maşinilor
electrice. Acest număr de ore se stabileşte pentru frecvenţa maşinilor electrice, a fiecărui
utilaj din instalaţie în raport cu condiţiile în care funcţionează şi pe baza studiului amănunţit
al alegerii diferitelor piese sau subansamble. Acest sistem admite modificarea continuă a
normelor de reparaţii în raport cu rezultatele controlului planificat.
În prezent, întreţinerea şi repararea maşinilor electrice se face după următoarele
sisteme adaptate la o navă:
-sistemul de revizii tehnice RT;
-reparaţii curente de gradul I-RCl şi IIRC 2;
48

- reparaţii capitale;
Reviziile tehnice constau în operaţiile ce se execută de regulă înaintea unei operaţii
planificate, în scopul determinării stării tehnice a maşinii şi echipamentului, precum şi
operaţiile ce urmează a se executa cu ocazia primei reparaţii planificate pentru a se asigura
în continuare funcţionarea normală a maşinii şi echipamentului, şi se execută de regulă, în
timpul opririlor de scurtă durată a utilajului acţionat. În timpul acestor revizii se curată
părţile accesibile ale maşinilor, aparatelor, prin înlăturarea prafului cu un aspirator sau prin
suflarea cu aer comprimat uscat (max. 2 atm.),se înlocuiesc periile uzate cu altele noi, se
verifică funcţionarea port-periilor, uzura lagărelor, se execută ungerea lor.
De obicei, în timpul acestor revizii se execută simultan şi încercările maşinilor:
- măsurarea rezistentei de izolaţie;
- măsurarea rigidităţii dielectrice a izolaţiei maşinilor;
- măsurarea bătăilor la ax, etc. şi se înlătură defecţiunile constatate;
Reparaţiile curente RC1 si RC2 asigură menţinerea în perfectă stare de funcţionare a
echipamentului electric şi constă în intervenţiile ce se execută periodic,planificate în
scopul înlăturării uzurii sau a unor deteriorări survenite în exploatare, recondiţionarea şi
înlocuirea unor părţi de subansamble uzate.
RC1 constă în executarea demontării parţiale a maşinii electrice la locul de
dispunere, se înlocuiesc piesele uzate şi se înlătură defecţiunile mici. Se face verificarea
cutiei de borne (înlocuirea şuruburilor, papucilor uzaţi). Se verifică uzura periilor
(înlocuirea periilor uzate şi ajustarea). Se verifică colectorul (şlefuirea şi curăţarea cu
cârpă cu alcool tehnic). Se verifică starea izolaţiei înfăşurării între ele şi faţa de maşină,
recondiţionarea în locurile deteriorate sau slăbite. Se vopseşte maşina electrică şi se ung
lagărele.
RC2 necesită demontări parţiale sau totale ale maşinii electrice. Se execută toate
operaţiile de Ia RC1 şi în plus: verificări şi reparaţii mărunte la mecanismul pentru
apăsarea periilor pe colectoarele maşinilor electrice, curăţirea colectorului, verificarea
izolaţiei, lipirea la colector a capetelor înfăşurărilor, demontarea lagărelor şi ungerea lor,
recondiţionarea izolaţiilor deteriorate.
Reparaţiile capitale RK. constă în necesitatea demontării complete a maşinii
electrice, executându-se următoarele operaţii:
- repararea sau înlocuirea înfăşurării;
- repararea colectorului sau a inelelor colectoare;
49

- îndreptarea axului motorului, echilibrarea rotorului, bandajarea rotorului (ceea
ce ajută la rigidizarea înfăşurărilor pe rotor);
- uscarea şi impregnarea înfăşurărilor;
Necesitatea funcţionării continue a echipamentului electric de la nave impune
adoptarea metodei de întreţinere preventivă. Acest sistem dă posibilitatea depistării
defecţiunilor posibile si să elimine cauzele în scopul asigurării unei bune funcţionări.
Programul de întreţinere periodică are in vedere:
- inspecţiile periodice astfel încât să permită depistarea situaţiilor ce pot conduce
la oprirea instalaţiei;
- întreţinerea instalaţiei pentru a se evita producerea de avarii sau pentru a se executa
reparaţii până la apariţia unor avarii mai grave.
Ca activităţi în timpul întreţinerii periodice sunt:
- curăţirea - săptămânal sau lunar;
- ungerea - efectuată de personal calificat;
- inspecţia - în cadrul căreia intră următoarele:
- spălarea şi ungerea subansamblelor şi a pieselor;
- verificarea lagărelor şi ungerea lor;
- verificarea contactelor fixe şi mobile.
8.1.1. Tehnologia stabilirii defectelor în instalaţia electrică:
Presupunem determinarea felului defectului (mecanic sau electric), al locului
defectului în instalaţie, a cauzei care 1-a produs şi stabilirea posibilităţilor de evitare a
apariţiei defectului în viitor.
Dată fiind complexitatea instalaţiei electrice, stabilirea defectului nu poate fi concepută fără
o cunoaştere a instalaţiei, a modului ei de funcţionare şi a locurilor probabile de apariţie a
defectelor. Este necesară cunoaşterea măsurii în care defectele determină
nefuncţionarea instalaţiei.
Din acest punct de vedere avem:
- defecte în instalaţia de alimentare;
- defecte în instalaţia de utilizare;
- defecte în instalaţia de comandă;
- defecte în instalaţia de protecţie, semnalizare, măsurare.
Cauzele care pot duce la apariţia defectelor în instalaţia electrică sunt:
- deteriorări mecanice a contactelor electrice;
50

- umezirea instalaţiei, îmbătrânirea, supraîncălzirea, supratensiunea.
Metoda generală de stabilire a defectelor în instalaţia electrică cuprinde aplicarea
succesivă a următoarelor, după metodele:
- metoda inductivă, se aplică pentru a explica simptomele prin care se manifestă
defectul.
În cadrul acestei metode se trece de la efect la cauză. La reacţia bobinei de comandă
a unui aparat de conectare se stabileşte locul unde s-a produs întreruperea cicuitului: la
siguranţă, la un contact electric sau in interiorul bobinei.
- metoda deductivă, se aplică pentru a stabili fenomenele care au determinat
apariţia defectelor şi se procedează prin excludere, analizând pe rând fenomenele cate pot
produce defectul cercetat. În acest caz folosim datele puse la dispoziţie de personalul de
exploatare; indicaţiile vizuale asupra instalaţiei defectate.
Etapele generale de urmat în cadrul lucrărilor de stabilire şi remediere a defectului
pot fi rezumate sub forma:
- se cercetează schema electrică a instalaţiei, urmărind funcţionarea părţilor
componente;
- se secţionează schema în circuite şi se parcurge traseul de alimentare de la
consumator la sursă.
De exemplu, dacă motorul electric nu funcţionează, prima dată se găseşte circuitul
lui de alimentare şi se urmăresc contactele de comanda ale aparatelor. Se realizează
următoarele:
- se controlează prezenţa tensiunii la bornele de alimentare ale receptoarelor şi apoi la
ieşirea primului tablou în amonte;
- se verifică prezenţa tensiunii sau continuarea circuitului în alte puncte;
- se întrerupe alimentarea în porţiunea de instalaţie defectă;
- se trece la remedierea defectului;
- se consemnează în schema modificările efectuate în instalaţie;
- la repunerea în funcţiune a instalaţiei se fac probe şi măsurători pentru a
observa fucţionarea corectă a acesteia.
8.2. Principalele defecte şi modul de remediere:
l. Încălzirea excesivă a bobinajului statoric:
- cauza: scurtcircuit între spirele sau bobinele statorului;
51

- remediere: se identifică locul unde s-a produs scurtcircuitul, se repară bobinele
defecte sau se rebobinează statorul;
- cauza: supraîncărcarea maşinii electrice;
- remediere: se reduce sarcina pe maşina electrică;
- cauza: bobinajul statorului este umed;
- remediere: se usucă bobinajul statorului;
- cauza: ventilaţia necorespunzătoare sau temperatura ambiantă ridicată;
- remediere: îmbunătăţirea ventilaţiei.
2.Încălzirea excesivă a bobinajului rotoric:
- cauza: scurtcircuit între spirele sau bobinele rotorului;
- remediere: se identifică locul unde s-a produs scurtcircuitul, se repară bobinele
defecte sau se rebobinează rotorul;
- cauza: contact imperfect în locul de conectare al bobinelor;
- remediere: se verifică legăturile şi se refac cele slăbite;
- cauza: rotorul freacă cu statorul;
- remediere: se controlează întrefierul şi se înlocuiesc lagărele.
3. Scânteiere la inelele colectoare:
- cauza: inelele colectoare sunt murdare, au asperităţi sau lovituri;
- remediere: se strunjesc şi se şlefuiesc;
- cauza: periile nu se mişcă liber în port – perii;
- remediere: se şlefuiesc periile pentru a se mişca liber în port - perii şi pentru a avea o
bună suprafaţă de contact;
- cauza: periile nu apasă suficient asupra inelelor colectoare;
- remediere: se reglează presiunea periilor cu ajutorut resoartelor portperii.
4. Încălzirea excesivă a miezurilor magnetice:
- cauza: tensiunea de alimentare e mai mare decât cea nominală;
- remediere: se reduce tensiunea reţelei, se intensifică ventilaţia;
- cauza: tolele circuitului magnetic sunt scurtcircuitate din cauza unor execuţii
neângrijite(bavuri, crestături);
- remediere: se îndepărtează bavurile, crestăturile;
- cauza: contact între buloanele de strângere şi pachetul de tole;
- remediere: se înlocuieşte izolaţia buloanelor.
5. Motorul electric nu porneşte:
- cauza: în una din fazele bobinajulul statorului nu circulă curent
52

- remediere: se schimbă siguranţa sau se rebobinează
- cauza: fazele au conexiuni greşite
- remediere: se verifică sensurile, începuturile şi sfârşiturile fazelor şi se refac
legăturile
- cauza: scurtcircuit în bobinajul statorului din care cauză, la pornire, se ard
siguranţele
- remediere: se repară sau se înlocuiesc bobinele defecte
6. Viteza de rotaţie a motorului electric este anormală:
- cauza: motorul este supraîncărcat
- remediere: se reduce sarcina motorului
- cauza: tensiunea de alimentare este scăzută faţă de valoarea nominală
- remediqre: se măreşte tensiunea până la valoarea nominală
- cauza: una din fazele statorice este inversată
- remediere: se verifică conexiunile, sensurile bobinelor, începuturile şi sfârşiturile
fazelor
7. Încălzirea excesivă a lagărelor:
- cauza: ungere insuficientă
- remediere: se verifică dacă inelele de ungere corespund (să nu fie prea mici, prea grele
sau să nu fie gripate)
- cauza: jocul dintre fusul arborelui şi cuzinet este prea mare
- remediere: se cromează fusul arborelui, după care se face rectificarea fusului şi alezarea
cuzinetulul pentru a obţine jocul optim
- cauza: rulmentul este murdar de praf sau alte particule
- remediere: se spală rulmentul şi se schimbă unsoarea
8. Maşina vibrează în timpul funcţionării:
- cauza: bobinajul rotorului s-a deplasat
- remediere: se consolidează corespunzător bandajele rotorice şi se echilibrează rotorul
- cauza: scurtcircuit între spirele infăşurărilor
- remediere: se verifică şi se rebobinează
- cauza: fusul arborelui s-a ovalizat
- remediere: se strunjeşte sau se rectifică arborele
9. Maşina produce zgomot anormal:
- cauza: miezul magnetic al maşinii nu este strâns suficient
- remediere: se strânge pachetul de tole şi se împănează
53

- cauza: maşina vibrează
- remediere: se strâng şuruburile
- cauza: aerul pătrunde anormal prin canalele de ventilaţie
- remediere: se modifică ventilaţia.
Concluzii
54

În ansamblu, economicitatea operaţiilor de încărcare - descărcare depinde de
economicitatea tehnică, dependentă la rândul ei de randamentul mecanismului şi de
consumul de energie electrică la încărcare, precum şi de economicitatea de exploatare care
este legată de reparaţii şi deservire. Creşterea economicităţii poate fi realizată prin
automatizarea acţionării electrice, automatizare care trebuie să rezolve probleme ca:
realizarea unor viteze mari de ridicare a cârligului ( de la 1,07 la 3,34 m/s ), obţinerea unor
viteze mici de aşezare a sarcinii ( 0,1…0,25 m/s ) şi de asemenea obţinerea unor viteze şi
acceleraţii mici de ridicare a sarcinii.
Nivelul posibil de automatizare depinde de felul mărfurilor. Perspectiva dezvoltării
acţionărilor electrice ale mecanismelor de încărcare - descărcare depinde în mare masură de
sistemul de operaţii de încărcare -descărcare . Principala dificultate în calea automatizării
acestor operaţii este prezenţa legăturii prin parâma între sarcini şi mecanismul de execuţie.
De aceea se caută noi sisteme de încărcare - descărcare, de exemplu comanda de la distanţă
din posturi mobile, mărirea gamei de reglare, trecerea la sisteme automate cu comandă
program etc.
BIBLIOGRAFIE :
55

I.R. Freizdon, "Acţionarea electrică a mecanismelor navale"
M. Braşoveanu,"Acţionări electrice. Aplicaţii industriale"
Gheorghiu Silviu,"Acţionări electrice navale", vol. I;II. Constanţa, Academia Navală
"Mircea cel Bătrân"
Comşa D.,"Proiectarea instalaţiilor electrice industriale", Bucureşti , Editura Didactică şi
Pedagogică ,1979
"Acţionări electrice navale", Ion Zaharia
"Catalogul elementelor tipizate pentru mecanismele de ridicat", I.C.E.N.R.
Documentaţia navei
Catalog de maşini electrice
Catalog de aparate electrice de joasă tensiune
56