





Limbile
Pagini
Legal


Sistemul senzorial al robotilor
Marian Poboroniuc
Note de curs

Perceptia senzoriala ?
• Inregistrarea informatiei despre mediulinconjurator
• Senzor – un dispozitiv electric/ mecanic/ chimic care transforma un atribut al mediului inconjurator intr-o masuratoarecantitativa
• Fiecare senzor (traductor) realizeaza oconversie intre doua forme de energie

Perceptia senzoriala umanasi organe senzoriale
• Vaz: ochi (optica, lumina)
• Auz: urechi (acustica, sunete)
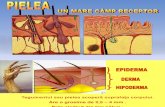
• Pipait: piele (mecanica, caldura)
• Miros: nas (vapori-faza chimica)
• Gust: limba (lichid-faza chimica)

Extensie domeniu de masura si modalitati
• Vedere in afara spectrumului RGB– Camere de vederi in infrarosu – pe timp de
noapte
• Viziune Activa– RADAR si masuratori optice (LASER)
• Percepere sunete in afara domeniului20 Hz – 20 kHz – Domeniu de masura in ultrasunete
• Analize chimice altele decit celeobtinute prin gust si miros
• Radiatie.

Traductoare
• Termistor: temperatura -> rezistenta
• Electrochimic: proprietati chimice -> tensiune
• Fotocurent: intensitate lumina -> curent
• Piroelectric: radiatie termica -> tensiune
• Umiditate: umiditate -> capacitate electrica
• Lungime : pozitie -> inductanta
• Microfon: presiune sunet -> <parametruelectric>

Fuziune Senzoriala si Integrare
• Om: Un organ o masuratoare?– Nu este o afirmatie adevarata intotdeauna
• Echilibru: urechile
• Pipait: limba
• Temperatura: piele
• Robot: – Fuziune Senzoriala :
• Combina informatiile provenite de la mai multi senzori intr-o structura de date (uniforma).
– Integrare Senzoriala :• Utilizarea informatiilor provenite de la mai multi
senzori pentru a realiza o actiune dorita

Fuziune Senzoriala• De obicei un senzor nu este de
ajuns– Senzorii reali prezinta zgomot de
masura– Precizie limitata– Probleme de fiabilitate– Percepere limitata a mediului
inconjurator•Returneaza o descriere incompleta a mediului inconjurator
– Senzorul necesar ar putea fi scump –combinarea a doi senzori ieftini poateconduce la o solutie mai ieftina

Procesare Generala
Fuziune Interpretare
Senzor
Senzor
Senzor
Senzor
Sesizare Perceptie
Preprocesare
Preprocesare
Preprocesare
Preprocesare

Preprocesare
• Prelucrarea informatiei senzoriale obtinute de senzor inainte de a o utiliza
• Reducere zgomot masura -> filtrare
• Recalibrare
• Prelucrari de baza - exp. detectare contur in viziunea artificiala
• Particularizata pentru fiecare senzor
• Modifica (transforma) reprezentarea datelor

Senzor/ Fuziune Date• Combina datele obtinute de la diverse surse
– masuratori de la diversi senzori
– masuratori din diverse pozitii
– masuratori la diverse momente de timp
• Cel mai adesea este o metoda matematica care tine cont de incertitudinile inerente prezente in datele de intrare– Metode discrete
– Retele neuronale
– Filtre Kalman
• Produce un set de date

Clasificare Senzori• Stare Interna (proprioceptivi) - Stare
Externa (exteroceptivi)– masuratori ai parametrilor interni ai robotului
exp. nivel baterie, positie roata, unghiarticulatie, etc,
– Observatii asupra mediului, obiectelor etc.• Activi - inactivi
– emitatori de energie catre mediu, exp., radar, sonar
– Receptioneaza energie in mod pasiv pentru a extrage date, exp., camera video
• Cu contact – fara contact• In domeniul vizibil – in domeniul invizibil
– Sesizare bazata pe viziune artificiala, procesare imagini, camere video
– Senzori in infrarosu

Senzori utilizati pentruroboti

Celula solara
Senzor de distanta in
infrarosu, digital
Compas
Comutator atingere
Comutator Presiune
Comutator limita
cursa
Comutator magnetic
Senzor Magnetic
Senzor Polaroid Miniatura
Placa Senzor Polaroid
Traductoare piezo cu ultrasunete
Senzor Piroelectric
Termistor
Senzor Gaz
Senzor Radiatie
Gieger-Muller
Senzor piezoelectric tip banda
Senzori rezistivi de indoire
Senzori mecanici de inclinare
Senzor de inclinare rezistiv
Celula CDS
Senzor rezistiv - lumina
Efect Hall
Senzori de cimp
magnetic
Compas
Senzor IRDA
Senzor - Amplificator IR
Receptor modulare IR Receptor IR Receptor radio
IR Senzor
GyroAccelerometru
Emitator IR
Dioda IR
Detector UV
Detector Metale

Senzori utilizati la roboti• Rezistivi
– Senzori de incovoiere, potentiometre, fotocelule rezistive, ...
• Senzori tactili
– Comutator cu contact…
• Senzori Infrarosu
– Proximitate, senzori la distanta…
• Senzori la distanta cu ultrasunete
• Senzori inertiali (masura a derivatei a doua a pozitiei)
– Accelerometre, Giroscoape,
• Senzori de orientare
– Compas, Inclinometru
• Senzori LASER de distanta
• Viziune, GPS, …

Senzori Rezistivi

Senzori de incovoiere
• Rezistenta = 10kΩ - 35kΩ
• Rezistenta creste odata cu cresterea
incovoierii
Potentiometre
• senzori de pozitie pentru mecanisme cu
miscare de translatie sau rotatie
• Usor de gasit, usor de montat
Senzor la lumina (Fotocelula)
• Util detectie directie/prezenta lumina
• Rezistenta neliniara
• Viteza de raspuns redusa la modificari ale
intensitatii luminii
Senzori Rezistivi
Senzor rezistiv incovoiere
Fotocelula
Potentiometru
Rezistenta scade odata cu cresterea
intensitatii luminii

Aplicatii
Senzor
• Masura a unghiuluiunei articulatii
• Urmarire zid/ Detectare coliziune
• Senzor de greutate
Senzori
Senzor

Codoare incrementale pentrumotoare

Codoare Incrementale Optice
- directie
- rezolutie
fante
Emitator lumina
Senzor lumina
circuit decodare
A
B A defazat inainte
fata de B
• Codor incremental:
• Genereaza un nr. de impulsuri proportional cu viteza de rotatie.
• Directia poate fi indicata cu un codor cu doua circuite.

Codoare Optice Absolute
Gray Code
• Utilizate atunci cind nu trebuie sa pierdem referinta.
• Coduri Gray: in orice moment se modifica doar un bit ( incertitudine redusa).
• Informatia este transferata in modul parallel (necesare mai multe fire).
000
001
011
010
110
111
101
100
000
001
010
011
100
101
110
111
Binary

Alti senzori utilizati in odometrie
• Rezolver
• Potentiometre
= variaza rezistenta
Are doua infasurari statorice
pozitionate la 90 de grade.
Tensiunea de iesire este o functie
SIN() sau COS() de unghiul
rotorului. Rotorul este format
dintr-o a treia infasurarea,
infasurarea C.

Senzori la distanta(Ultrasonici, Laser)

Senzor la distanta
• Timp de emisie-receptie
• Impulsurile masurate provin in mod uzualde la surse de energie ultrasonora, RF sauoptica.
–D = v * t
–D = distanta dus-intors
–v = viteza de propagare a undei
– t = timp scurs intre emisie si receptie
• Sunet =~ 0.3 metri/msec
• RF/lumina = 0.3 metri / ns (greu de masurat distante scurte 1-100 metri)

Senzori Ultrasonici• Principiu de lucru:
– Emit un tren de ultrasunete (50kHz), (omul audesunete: 20Hz … 20kHz)
– Masoara timpul scurt pina la momentul in care receptorul detecteaza ecoul.
– Determina distanta pina la cel mai apropiat obiect.
D = v * t
D = distanta dus-intors
v = viteza de propagare(340 m/s)
t = timp scurs
Lilieci, delfini,
…

Senzori Inertiali• Giroscoape
– Masoara viteza de rotatie independent de sistemulde coordonate
– Aplicatii uzuale: • Senzori de orientare, Sisteme de navigare complet
inertiale.
• Accelerometre– Masoara acceleratii relativ la un sistem inertial
– Aplicatii uzuale: • Senzor de inclinare in aplicatii statice, Analiza vibratiilor,
Sisteme de navigare complet inertiale

Accelerometre
• Masoara forta de inertie generatade o masa cunoscuta supusa uneimodificari in viteza
• Aceasta forta poate modifica
– Tensiunea unui arc
– Deflexia unei fante
– Frecventa de oscilatie a unei mase

Accelerometre
Accelerometrele de inalta precizie includ o bucla servo pentru a imbunatati liniaritatea senzorului.
kxdt
dxc
td
xdmF
2
2

Giroscoape• Returneaza un semnal proportional cu
viteza de rotatie.
• Exista o mare varietate de giroscoapebazate pe diverse principii de functionare
Vitezade rotatie
Integrare Unghiorientare

Probleme legate de zgomot de masura
• Senzorii reali sint afectati de zgomot
• Origini zgomote: fenomene naturale+ nu sunt ideali d.p.d.v. ingineresc
• Consecinte: precizie limitata a masuratorilor
• Filtrare:
– software: medie, algoritmi de procesare a semnalelor
–Hardware (dificil) : exp.condensator
Top Related