







Limbile
Pagini
Legal


MODELAREA FRÂNEI DISC PENTRU VAGOANELE DE CĂLĂTORI
1. Prezentarea sistemului de frânare a vagoanelor de călători
Frânele automate actuale permit frânarea rapidă, uniformă şi sigură a tuturor
vagoanelor din tren de către un singur agent (mecanicul de pe locomotivă).
Instalaţia de frână a unui vagon se compune din mecanismul de acţionare care produce
efortul de frânare, timoneria de frână care transmite efortul de frânare la roţi şi elementele de
fricţiune (sabot-roată, garnitură-disc, patină-şină) care creează forţa de frecare.
Principalele probleme constructive ale frânelor sunt ridicate de vitezele tot mai mari de
circulaţie, care îngreunează oprirea pe distanţele de frânare obişnuite. Fenomenele cel mai
greu de contracarat care apar la viteze mari sunt:
a. scăderea coeficientului de frecare (dintre bandajul roţii şi sabotul de frână sau dintre
discurile de frână şi plăcile de fricţiune) la viteze mari;
b. dezvoltarea unei mari cantităţi de căldură în timpul frânărilor de la mare viteză
Pentru prima problemă soluţia constă în principal din creşterea forţelor de frânare la
viteze mari. Comandarea forţelor de frânare trebuie să evite blocarea roţilor, fenomen care
apare atunci când forţa de frânare aplicată depăşeşte aderenţa disponibilă. Cea mai simplă
rezolvare constă din variaţia presiuni în cilindrul de frână: presiune sporită la vitezele mari
respectiv presiune redusă la vitezele mai mici, la care pericolul blocării roţilor este sporit.
Vagoanele de călători trebuie dotate obligatoriu cu dispozitive electronice speciale
ABS (antiblocatoare). Din cauza fenomenelor complexe care se manifestă în timpul frânărilor
comanda fiecărei osii este individualizată. O altă soluţie este utilizarea de frâne suplimentare
electromagnetice la viteze mari.
Disiparea rapidă a unei cantităţi cât mai mari de energie poate fi obţinută prin diferite
măsuri constructive: utilizarea de frâne suplimentare electromagnetice, frâne autoventilate,
utilizarea unor materiale deosebit de rezistente la căldură, suplimentarea numărului de discuri
de frână de pe o osie, etc.
În ambele cazuri s-a ajuns în timp la realizări tehnologice de vârf şi se poate anticipa
că în viitor creşterea performanţelor se va obţine în primul rând prin dotarea cu inteligenţă a
echipamentelor de frânare, astfel încât resursele tehnologice să fie exploatate la maxim.

2. Cilindrul de frână şi comanda sa
Frâna principală a unui vagon de călători de mare viteză este de obicei de tip disc, cu
acţionare pneumatică. Forţa de frânare este obţinută într-un cilindru alimentat cu aer sub
presiune de către un distribuitor de aer, prin intermediul unei electrovalve speciale.
În continuare se prezintă datele tehnice ale unui cilindru de frână tipic (UB de 10”)
utilizat la boghiul Minden-Deutz.
- suprafaţa pistonului A: 0,05064506 m2;
- forţa de rapel medie Fr: 1500 N;
- presiunea de serviciu P: 3,8 bar.
Soluţia clasică de reglare a presiunii, folosită de exemplu de către firma
Knorr pentru frâna KE-GPR, constă din utilizarea unui regulator de presiune
bipoziţional cu histerezis. Componentele unei astfel de instalaţii sunt:
distribuitorul de aer, releul de presiune, două rezervoare de alimentare (de 75
l respectiv 125 l), ventilul de alimentare întârziată, acceleratorul de frânare
rapidă, dispozitivul ABS şi cilindrul.
Regulatorul este de tip centrifugal, pus în mişcare de osia vagonului.
Regimurile de frânare sunt alese astfel ca forţa maximă de frânare să fie de
160% din greutatea vagonului la viteze mari respectiv 70% din greutatea
vagonului la viteze mici. Pragurile de comutare sunt reglate la 50 km/h
respectiv 70 km/h.
Presiunea maximă în cilindrul de frână se ridică până la 3,8daN/cm2 la
frânările puternice
şi 1,7daN/cm2 la frânările obişnuite. Atât la frânările puternice cât şi la cele
obişnuite, releul de presiune produce mai întâi o presiune de 0,4daN/cm2 în
cilindrul de frână, necesară aplicării saboţilor pe bandaje şi apoi permite
creşterea presiunii la valoarea corespunzătoare frânării efectuate.
Dispozitivul ABS al frânei KE-GPR constă dintr-un regulator centrifugal
montat pe fiecare osie. O masă învârtitoare se roteşte solidar cu osia la
pornire, la mersul uniform şi la încetinirea normală produsă de frânări. La
apariţia blocării osia este decelerată brusc dar masa regulatorului continuă să
2
se rotească, acţionând o supapă de siguranţă care pune cilindrul de frână în
legătură cu atmosfera, reducându-se astfel forţa de frânare.
Timoneria de frână
Timoneria este alcătuită din bare şi leviere şi are următoarele obiective:
amplificarea forţei, transmiterea ei la discuri şi distribuirea uniformă a forţei
de apăsare la toate garniturile. Mărimile care caracterizează timoneria sunt
amplificarea i şi randamentul η.
Frâna cu disc
Cea mai des utilizată frână este frâna disc. Forţa de frecare se dezvoltă
între discurile de frânare montate pe osia vagonului şi garniturile de frecare
pe care se aplică forţele produse în cilindrul de frână şi transmise prin
timonerie. După poziţia acestor piese frânele pot fi cu discurile montate pe
osia vagonului (în diferite poziţii şi în număr variabil) sau cu disc dublu montat
pe fiecare roată.
O problemă ridicată de frâna disc este variaţia coeficientului de frecare
μ cu viteza relativă dintre disc şi garnitură de frecare v, variaţie prezentă în
ciuda eforturilor firmelor producătoare de a o elimina. Măsurarea directă a
dependenţei μ(v) este extrem de greu de realizat din cauza condiţiilor de
funcţionare şi de montare ale frânei. De aceea, în formulele de calcul ale
distanţei de frânare utilizate de UIC (de exemplu formula Munchner), μ
apare ca un coeficient mediu μs=0,35 în cazul frânărilor rapide. Pe lângă
aceasta μ este influenţat şi de alţi factori cum ar fi: montarea elementelor
frânei, uzura, temperatura, etc.
Forţa aplicată discurilor de frână de pe o osie este:
Fo = (P * A − Fr ) * i * η (1)
Aderenţa disponibilă
Atunci când forţa de frânare la nivelul petei de contact dintre roată şi
şină depăşeşte aderenţa disponibilă se iniţiază blocarea roţii. Condiţia de
evitare a blocării este:
3

Q⋅ f ⋅ R > Fo ⋅ μ ⋅ r (2)
unde: Q este sarcina pe osie, f coeficientul de aderenţă, R raza nominală
a roţii, FO forţa de apăsare a garniturii de frânare, μ coeficientul de
frecare garnitură-disc iar r raza de frânare, dependentă de diametrul
discurilor de frână şi de forma garniturilor de frecare.
O mărime care caracterizează global frâna este δ coeficientul de
frânare, care se obţine din expresia forţei maxime de frânare aplicabile la
periferia roţii.
(3)Procentul de frânare este coeficientul de frânare înmulţit cu 100.
Coeficientul de aderenţă f depinde de viteza relativă dintre roată şi şină
şi în plus de tipul sistemului roată-şină, de dinamica vehiculului, de condiţiile
climatice şi de curăţenie ale căii de rulare, etc. La încercările efectuate asupra
frânelor ABS s-a relevat o importantă componentă aleatorie a f, care poate
varia semnificativ chiar pe parcursul câtorva metri.
O exprimare analitică a dependenţei f(v) este dată de relaţia Curtius-
Kniffler:
(4)
Asupra eficacităţii frânării au influenţă şi alţi factori cum ar fi modul
de umplere al cilindrilor de frână cu aer sau forma şi dimensiunile
elementelor frânei, care suferă diverse modificări în timpul frânărilor prin
încălzire. Din aceste motive, la calculul drumului de frânare, UIC indică
înlocuirea forţei de frânare prin greutatea frânată B care ţine seama de
toate caracteristicile şi particularităţile frânei. Ea se determină
experimental, în aşa fel încât să fie evitată blocarea roţilor, rezultatele
fiind redate în fişa UIC nr.544.
B = k ⋅ Fo [daN] (5)
unde k este coeficientul de calitate al frânei.
4

Raportul dintre greutatea frânată B şi greutatea totală a vagonului
T, exprimat în procente, se numeşte procentul greutăţii frânate şi are
expresia:
(6)
Distanţa de frânare
Spaţiul parcurs într-o frânare totală este indicele global care caracterizează cel mai bine
performanţele unui sistem de frânare. Conform formulei Munchner propusă de firma Knorr
şi agreată de UIC, distanţa de frânare Sf are următoarea expresie:
(7)
unde: γ este un coeficient cuprins între 0,05 şi 0,25, V viteza iniţială
[Km/h], μs coeficientul mediu de frecare dintre disc şi garnitura de frecare,
δ procentul de frânare, rT
rezistenţa specifică la înaintare [daN], j înclinarea pantei [‰] iar t timpul
de umplere al
cilindrului de frână cu aer comprimat [s]. Este de remarcat faptul că
această formulă are un caracter empiric şi se aplică numai în situaţia unui
procent de frânare constant.
3.Modelarea pe calculator a frânei
Pentru o bună înţelegere a funcţionării frânei şi pentru construirea unei platforme care
să permită studierea unor componente ale instalaţiei de frânare (electrovalva, regulatorul
dispozitivul ABS) este necesară modelarea pe calculator a ansamblului frânei vagonului.
Pentru realizarea sa am apelat la toolkit-ul SIMULINK din pachetul MATLAB 2009.
Modelul (fig.1) include următoarele blocuri funcţionale: vagon, boghiu, cilindru de frână,
regulator şi monitorizare (fig.2).
♦ Modulul vagon conţine ecuaţia de mişcare a vagonului.
Intrări: forţa de tracţiune, forţa de frânare, înclinarea, tara vagonului, viteza iniţială.
Ieşiri: forţa totală (pentru monitorizare), acceleraţia, viteza, poziţia.
5

♦ Modulul boghiu conţine ecuaţia de funcţionare a timoneriei şi a frânei disc, cu
următoarele variabile: amplificarea şi randamentul timoneriei, numărul de osii şi de discuri,
raza roţii şi raza de frânare.
Intrări: forţa realizată de cilindrul de frână, coeficienţii de frecare disc-garnitură de frecare
respectiv de aderenţă.
Ieşire: forţa de frânare.
♦ Modulul cilindru de frână conţine ecuaţia de funcţionare a cilindrului, cu
următoarele variabile: suprafaţa cilindrului, forţa de rapel şi timpul de umplere al cilindrului.
Intrare: presiunea de aer.
Ieşire: forţa dezvoltată de cilindru.
♦ Modulul regulator conţine diferite regulatoare de presiune pentru comandarea
cilindrului.
Intrări: acceleraţia, viteza, poziţia.
Ieşire: presiunea de aer.
♦ Modulul monitorizare conţine osciloscoape pentru monitorizarea parametrilor
frânării.
În acelaşi timp este modelată formula (7) pentru compararea rezultatelor obţinute.
Rezultate obţinute
În continuare sunt prezentate datele tehnice ale unui vagon de călători produs de Astra
Vagoane Arad pentru Grecia.
Parametrii care definesc exemplul ilustrat sunt:
- masa vagonului (gol): …………………………………………………. 42680 kg;
- regulatorul presiunii din cilindru de tip releu bipoziţional cu valorile:
- 320000 N/m2 pentru viteze mai mari de 50 km/h;
- 170000 N/m2 pentru viteze mai mici de 50 km/h;
- durata de încărcare a cilindrului de frână cu aer: …………………….… 4
sec.;
- suprafaţa cilindrului de frână: …………………………………………..
0,05064506 m2;
- forţa de rapel: ………………………………………………………….. 1500 N;
- amplificarea timoneriei de frână: ……………………………………….
5,03343465;
- randamentul timoneriei de frână: ………………………………………. 0,95;
6

- raza roţii: ………………………………………………………………. 0,46 m;
- raza de frânare: ………………………………………………………… 0,23 m;
- rezistenţa la înaintare: …………………………………………………. 20 N;
4.Modelarea coeficientului de frecare disc-garnitură de frecare
Determinarea directă a coeficientului μ de frecare dintre disc şi
garnitura de frecare şi apoi a dependenţei sale de viteza relativă dintre
piese μ(v) sunt operaţii extrem de dificile, din cauza condiţiilor
constructive şi funcţionale ale frânei disc. Din acest motiv, în formulele de
calcul ale distanţei de frânare (de exemplu formula Munchner), μ apare ca
un coeficient mediu (de exemplu μs=0,35 pentru cazul frânărilor rapide).
Pe lângă aceasta μ este influenţat şi de alţi factori cum ar fi: montarea
elementelor frânei, uzura, temperatura, etc.
În lucrare este prezentată o metodă indirectă de modelare a μ(v)
pornind de la un
model determinist al vagonului [5] şi de la dependenţa drumului de
frânare cu viteza iniţială, care se cunoaşte fie prin formulele empirice
cunoscute din literatură fie prin încercări. La stabilirea funcţiei μ(v) se
presupune cazul frânării totale, dar în continuare, cu rezultatele obţinute
se poate modela orice fel de program de frânare.
Metoda poate fi aplicată pentru orice tip de vehicul, chiar şi pentru
autovehicule.
Descrierea metodei
Pentru aplicarea metodei sunt necesare:
a) un model determinist al frânei vagonului [5], care să conţină modelarea
ecuaţiei de mişcare a vagonului precum şi modele pentru principalele
elemente funcţionale ale frânei: cilindrul de frână, timoneria de frână şi
sistemul disc-garnitură.
b) cunoaşterea dependenţei distanţa de frânare - viteza iniţială Sf(V). O
astfel de dependenţă este redată de formula Munchner propusă de firma
Knorr, distanţa de frânare Sf are următoarea expresie:
7

(8)
unde: γ este un coeficient cuprins între 0,05 şi 0,25, V viteza iniţială
[Km/h], μs coeficientul mediu de frecare dintre disc şi garnitura de frecare,
δ procentul de frânare, rT
rezistenţa specifică la înaintare [daN], j înclinarea pantei [‰] iar t timpul
de umplere al cilindrului de frână cu aer comprimat [s].
Coeficientul μ este modelat sub forma unui "look-up table"
bidimensional, făcând parte din modelul frânei vagonului. În prima linie
este introdusă viteza curentă dintre disc şi garnitură (egală cu viteza
vagonului în cazul în care nu există alunecare între roată şi şină). În linia a
doua se introduc valorile μ. Ambele linii ale tabelului sunt interpolate
liniar.
Linia a doua este construită începând de la vitezele mici,
introducând acele valori ale lui μ care minimizează eroarea dintre modelul
[5] şi formula etalon (1) sau rezultatele experimentale disponibile. Tabelul
se completează până la viteza maximă a vagonului.
Este evident că în cazul utilizării mai multor tipuri de garnituri de
fricţiune este necesară determinarea caracteristicii μ(v) pentru fiecare
garnitură în parte.
Rezultate obţinute
În continuare se prezintă aplicarea metodei pentru vagonul tip
Grecia produs de ASTRA Vagoane Arad.
Formula (1) de determinare a distanţei de frânare în funcţie de
viteza iniţială a fost aplicată în următoarele condiţii: γ = 0,25, μs =0,35,
rT = 2 daN, j = [‰], t =4 sec.
8

Rezultatele prezentate au un caracter demonstrativ deoarece nu se
cunoaşte tipul garniturii de fricţiune şi nici justificarea exactă a alegerii
coeficientului γ.
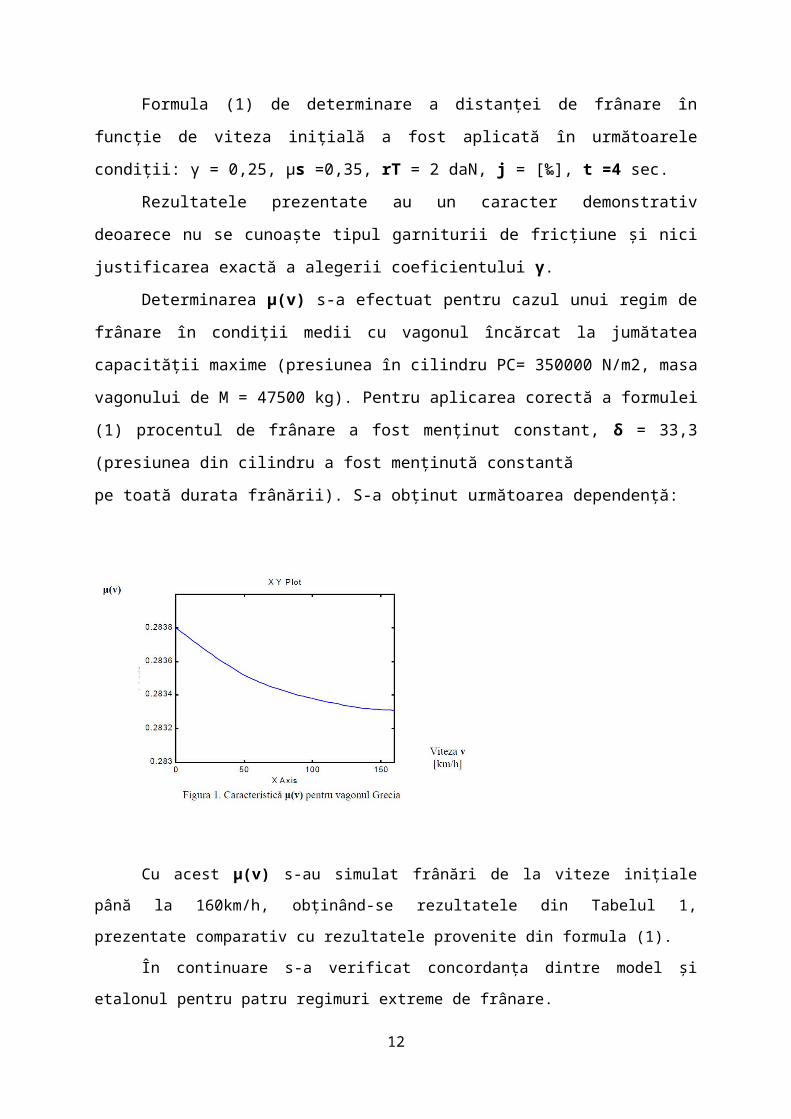
Determinarea μ(v) s-a efectuat pentru cazul unui regim de frânare
în condiţii medii cu vagonul încărcat la jumătatea capacităţii maxime
(presiunea în cilindru PC= 350000 N/m2, masa vagonului de M = 47500
kg). Pentru aplicarea corectă a formulei (1) procentul de frânare a fost
menţinut constant, δ = 33,3 (presiunea din cilindru a fost menţinută
constantă
pe toată durata frânării). S-a obţinut următoarea dependenţă:
Cu acest μ(v) s-au simulat frânări de la viteze iniţiale până la 160km/h,
obţinând-se rezultatele din Tabelul 1, prezentate comparativ cu rezultatele
provenite din formula (1).
În continuare s-a verificat concordanţa dintre model şi etalonul pentru
patru regimuri extreme de frânare.
9
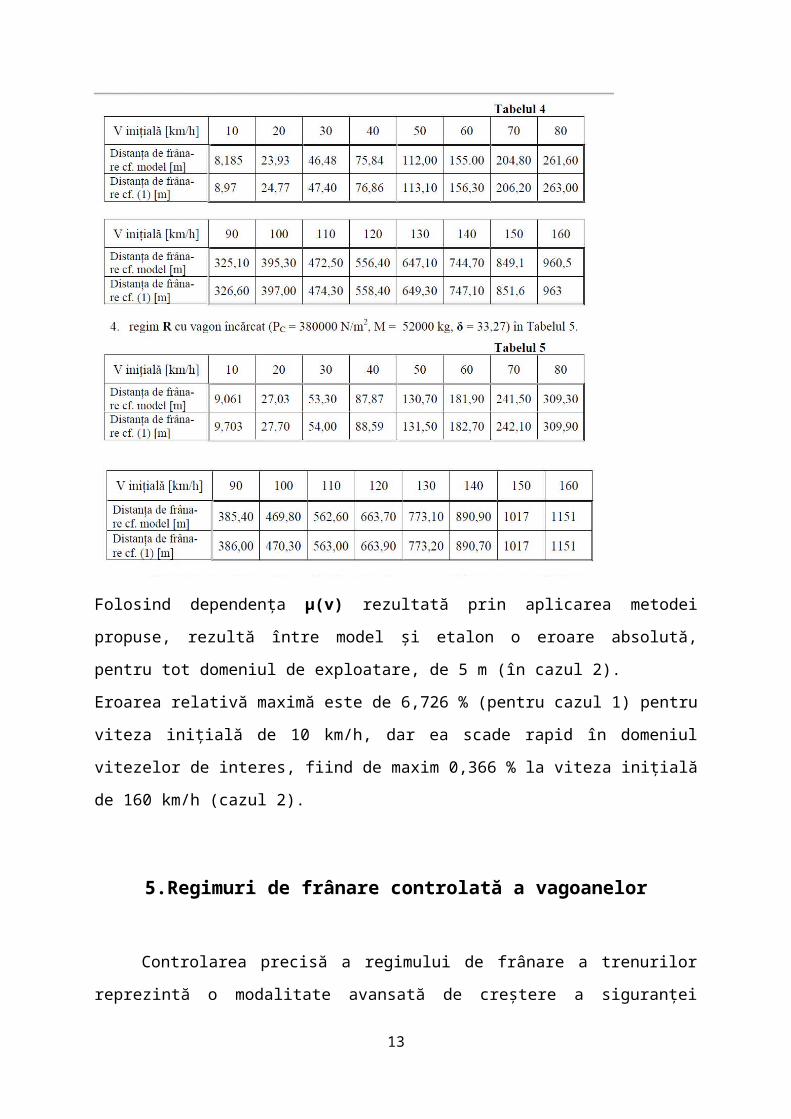
Folosind dependenţa μ(v) rezultată prin aplicarea metodei propuse, rezultă între model şi
etalon o eroare absolută, pentru tot domeniul de exploatare, de 5 m (în cazul 2).
Eroarea relativă maximă este de 6,726 % (pentru cazul 1) pentru viteza iniţială de 10 km/h,
dar ea scade rapid în domeniul vitezelor de interes, fiind de maxim 0,366 % la viteza iniţială
de 160 km/h (cazul 2).
5.Regimuri de frânare controlată a vagoanelor
Controlarea precisă a regimului de frânare a trenurilor reprezintă o modalitate avansată
de creştere a siguranţei circulaţiei, de reducere a consumurilor de energie şi a uzurii
componentelor frânei. Întrucât fiecare vagon trebuie să fie capabil să frâneze în mod
independent de celelalte, problema introducerii unor regimuri speciale de frânare trebuie pusă
pentru fiecare vagon în parte. Mai mult, întrucât fiecare osie a vagonului este frânată
independent de celelalte, problema trebuie pusă la nivelul fiecărei osii.
10

În lucrare sunt prezentate două regimuri: frânarea cu deceleraţie controlată şi
frânarea
pe distanţă controlată.
Se consideră că frânările nu sunt atât de puternice încât să producă blocarea roţilor.
Se consideră că presiunea aerului în cilindrul de frână este comandată printr-un
electroventil cu acţiune continuă. Viteza maximă de variaţie a presiunii este reglabilă prin
drosele introduse pe traseele de admisie respectiv de evacuare ale electroventilului.
Parametrii vagonului frânat sunt particularizaţi pentru vagonul tip Grecia [6].
Frânarea cu deceleraţie controlată
Frânarea cu deceleraţie controlată este caracterizată prin introducerea unei bucle de
reglare a deceleraţiei vagonului. La prima vedere ar părea că pentru menţinerea unei
deceleraţii constante este suficient să se menţină constantă presiunea aerului în cilindrul de
frână. Introducerea unei bucle de reglare a acceleraţiei este însă impusă de anumiţi factori
perturbatori cum ar fi creşterea coeficientului de frecare disc-garnitură de frecare la
viteze mici sau înclinarea traseului. Un astfel de regim ar putea asigura un confort optim
călătorilor. La alegerea regulatorului cel mai potrivit pentru o astfel de situaţie trebuie avut în
vedere ca modul său de acţiune să fie de tipul "cu urmărire". Frânarea trebuie începută cu o
valoare medie a presiunii, de exemplu cea a regimului "P" (Pc = 320000 N/m2). În continuare
trebuie ca regulatorul să acţioneze prin creşteri sau scăderi ale presiunii pentru urmărirea
valorii impuse a acceleraţiei.
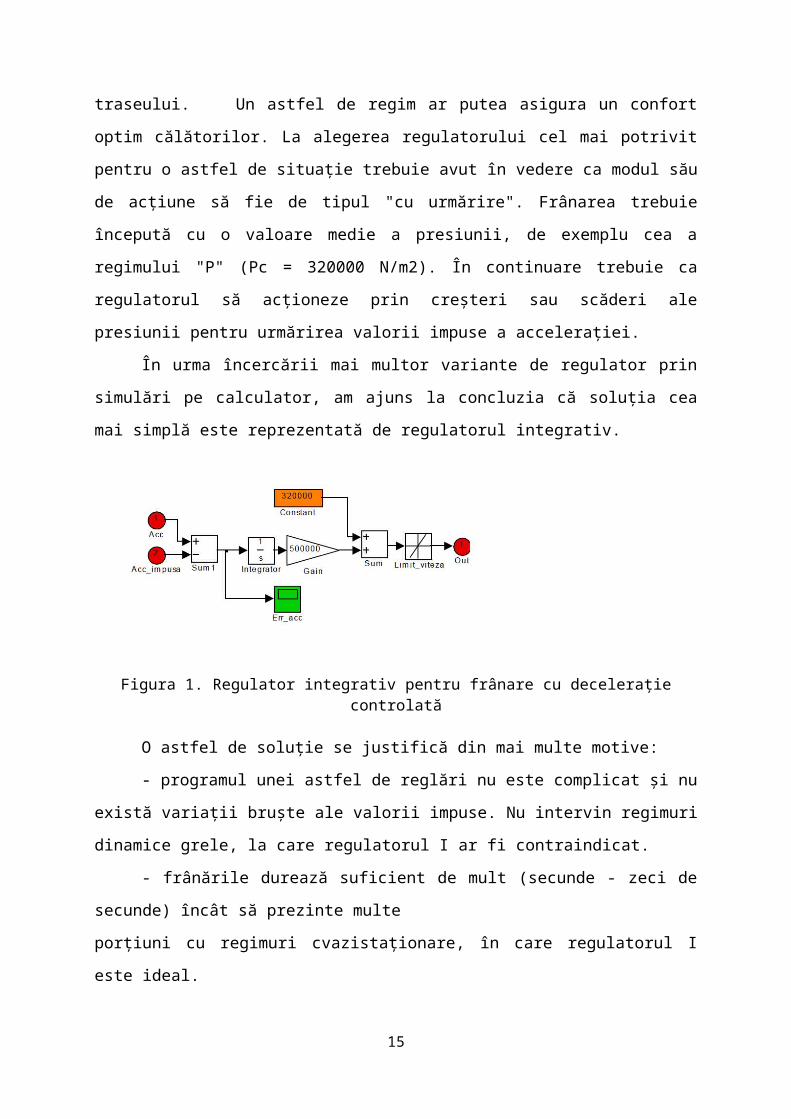
În urma încercării mai multor variante de regulator prin simulări pe calculator, am
ajuns la concluzia că soluţia cea mai simplă este reprezentată de regulatorul integrativ.
Figura 1. Regulator integrativ pentru frânare cu deceleraţie controlată
O astfel de soluţie se justifică din mai multe motive:
11
- programul unei astfel de reglări nu este complicat şi nu există
variaţii bruşte ale valorii impuse. Nu intervin regimuri dinamice grele, la
care regulatorul I ar fi contraindicat.
- frânările durează suficient de mult (secunde - zeci de secunde)
încât să prezinte multe
porţiuni cu regimuri cvazistaţionare, în care regulatorul I este ideal.
- instalaţia de frânare nu se caracterizează prin neliniarităţi sau
variaţii în timp importante ale parametrilor, astfel că reglarea regulatorului
nu este dificilă.
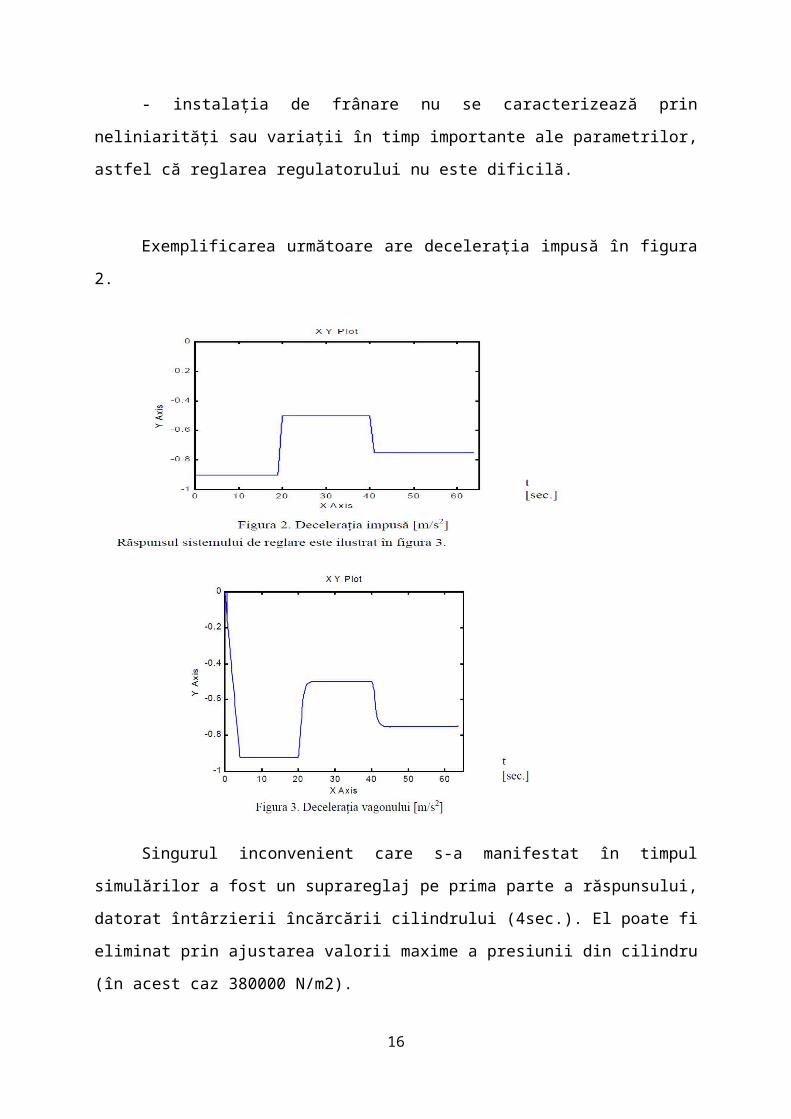
Exemplificarea următoare are deceleraţia impusă în figura 2.
12
Singurul inconvenient care s-a manifestat în timpul simulărilor a fost un suprareglaj pe
prima parte a răspunsului, datorat întârzierii încărcării cilindrului (4sec.). El poate fi eliminat
prin ajustarea valorii maxime a presiunii din cilindru (în acest caz 380000 N/m2).
Modul de acţionare a regulatorului este prezentat în figura 4.
Duratele regimurilor tranzitorii, care depind de ajustarea regulatorului, sunt de ordinul
2-3 sec. După ce regulatorul a ieşit din regimul de saturare nu se mai produc suprareglaje şi
nu se manifestă tendinţe de oscilaţie.
Frânarea pe distanţă controlată
Un al doilea regim de frânare controlată, a cărui importanţă este evidentă pentru
siguranţa circulaţiei, constă din conducerea frânării totale astfel încât să se respecte o distanţă
de frânare impusă.
În acest caz cel mai simplu regulator care poate acţiona satisfăcător este regulatorul
proporţional. De această dată nu se mai poate impune un program aleator. Este necesar ca
valoarea impusă a poziţiei, faţă de care se calculează eroarea de reglare, să fie pusă în acord
cu evoluţia "naturală" a caracteristicii poziţie-timp a vagonului. În figura 5 este prezentată
eroarea de reglare a poziţiei în timpul unei frânări la care valoarea impusă nu a fost adecvat
stabilită. Ajustarea regulatorului are în acest caz efecte minime.
13

În continuare vom considera ca valoare impusă ideală curba spaţiu-timp obţi-nută într-o frânare cu
presiune constantă în cilindru, cu distanţa de frânare de 1000 m.
Pentru a putea programa orice distanţă de frânare o primă ipoteză de lucru con-stă din simpla înmulţire a acestei caracteristici cu o constantă reprezentând distanţa de frânare impusă împărţită la 1000 m. Această ipoteză nu este însă satisfăcătoare de-oarece nu este posibilă păstrarea duratei de frânare din figura 6. Se impune utilizarea unei dependenţe care să coreleze poziţia vagonului nu cu timpul ci cu viteza momentană a vagonului.
Utilizând ca valoare impusă a poziţiei în timpul frânării funcţia de mai sus se obţin
rezultate mult mai bune, putându-se introduce chiar şi un regulator PI, deoarece în timpul
frânării nu mai apar salturi bruşte ale erorii de reglaj. Un astfel de rezultat, pentru o frânare de
la 160 km/h, pe o distanţă impusă de 1000 m arată ca în figura 8.
Figura 8. Eroarea de reglare în cazul unei frânări cu distanţa de frânare impusă la 1000
m .
14
În perioada iniţială eroarea de reglaj este influenţată de întârzierea acţiunii cilindrului.
Eroarea finală a distanţei de frânare este de 1 m (distanţa de frânare fiind de 999 m).
Pentru modificarea distanţei de frânare de la 160 km/h este suficientă înmulţirea
valorii impuse cu un coeficient (de exemplu pentru 1200 m coeficientul este 1.2). În exemplul
următor eroarea finală a fost de 5 m (distanţa de frânare de 1195 m).
Figura 9. Eroarea de reglare în cazul unei frânări cu distanţa de frânare impusă la 1200 m
Evoluţia presiunii în cilindrul de frână pentru situaţia de mai sus este următoarea:
Principala limitare a metodei prezentate apare în momentul în care se schimbă viteza
iniţială a frânării. O extindere a domeniului de operare, care scade într-o anumită măsură
precizia, constă din ponderarea măsurii vitezei care atacă blocul de valori impuse, cu un
coeficient egal cu raportul dintre viteza de 160 km/h (pentru care s-a stabilit valoarea impusă)
şi valoarea iniţială din momentul frânării.
15
În concluzie regulatorul are structura următoare:
16
Top Related