



Limbile
Pagini
Legal

Clasa a X + XI -a GEOMETRIE - 1
VECTORI
VECTORI
Definitie sseeggmmeenntt oorriieennttaatt :
- fie 𝑨 si 𝑩 doua puncte din plan sau din spatiu ;
- o pereche ordonata (𝑨, 𝑩) unde 𝑨 si 𝑩 sunt doua puncte , nu neaparat distincte , se
numeste segment orientat ( sau bipunct ) .
d A B
- segmentul orientat avand originea 𝑨 si extremitatea 𝑩 se noteaza 𝑨𝑩 .
Definitie sseeggmmeenntt oorriieennttaatt nnuull :
- in cazul in care orifginea si extremitatea coincid , 𝑨 = 𝑩 , rezulta segmentul orientat nul .
Definitie ddrreeaappttaa ssuuppoorrtt aa sseeggmmeennttuulluuii oorriieennttaatt :
- Daca 𝑨𝑩 este un segment orientat nenul , punctele 𝑨 si 𝑩 fiind distincte , 𝑨 ≠ 𝑩 , atunci
ele definesc o dreapta 𝒅 care se numeste dreapta suport a segmentului 𝑨𝑩 .( vezi fig. de mai sus )
Caracteristicile sseeggmmeennttuulluuii oorriieennttaatt :
Un segment orientat 𝑨𝑩 este caracterizat prin :
1). Marime sau modul :
- se noteaza cu : |𝑨𝑩 | sau ‖𝑨𝑩 ‖ ;
- reprezinta lungimea segmentului neorientat 𝑨𝑩 ; - segmentul orientat nul are marimea zero .
2). Directia :
- este determinata de orice dreapta paralela cu dreapta suport a segmentului orientat .
3). Sens :
- sensul segmentului orientat este dat de sensul deplasarii unui punct care parcurge
segmentul de la origine la extremitate : de la 𝑨 la 𝑩 in cazul nostru .
- sensul segmentului este indicat printr-o sageata trasata deasupra lui : 𝑨𝑩 .
Clasa a X + XI -a GEOMETRIE - 2
VECTORI
VECTORI
Definitie sseeggmmeennttee eecchhiippoolleennttee ssaauu eecchhiippoolleennttii :
- doua segmente orientate care au acelasi modul , directie si acelasi sens se numesc echipolente
- ca notatie , daca 𝑨𝑩 si 𝑪𝑫 sunt echipolente atunci se scrie : 𝑨𝑩 ~𝑪𝑫 .
Definitie ccllaassee ddee eecchhiippoolleennttaa :
- multimea tuturor segmentelor orientate echipolente cu un segment dat 𝑨𝑩 , iar 𝑨𝑩 poate fi
luat drept reprezentant al acestei clase ;
- pe baza relatiei “ a fi echipolent cu “ multimea segmentelor orientate din spatiu se imparte in
clase de echipolenta , care au proprietatile :
1). - oricare doua segmente din aceeasi clasa sunt echipolente ;
2). - oricare segment apartine unei si numai unei clase de echipolenta ;
3). - doua segmente ce apartin laclase diferite nu sunt echipolente .
Observatie :
- prin conventie toate segmentele orientate nule sunt totdeuna echipolente intre ele .
Proprietatile rreellaattiieeii ddee eecchhiippoolleennttaa :
a). 𝑨𝑩 ~𝑨𝑩 ( reflexivitate ) ;
b). Daca 𝑨𝑩 ~𝑪𝑫 atunci 𝑪𝑫 ~𝑨𝑩 ( simetrie ) ;
c). Daca 𝑨𝑩 ~𝑪𝑫 si 𝑪𝑫 ~𝑬𝑭 atunci 𝑨𝑩 ~𝑬𝑭 ( tranzitivitate ) .
Definitie rreellaattiiee ddee eecchhiivvaalleennttaa :
- o relatie care este reflexiva , simetrica si tranzitiva se numeste relatie de echivalenta .
- rezulta ca relatia de echipolenta a segmentelor orientate este o relatie de echivalenta .
Clasa a X + XI -a GEOMETRIE - 3
VECTORI
VECTORI
Definitie vveeccttoorrii :
- se numeste vector multimea tuturor segmentelor orientate echipolente cu un segment orientat
dat .
- Daca 𝑨𝑩 este segmentul orientat ales ca reprezentant al acestei clase , atunci clasa respectiva
, sau vectorul respectiv se noteaza prin 𝑨𝑩 sau �� , si se reprezinta tot printr-o sageata : are originea
𝑨 si extremitatea 𝑩 .
A
Bv
w
u
Caracteristicile vveeccttoorruulluuii :
Un vector �� este caracterizat prin :
1). Modul :
- se noteaza cu : |�� | sau ‖�� ‖ sau simplu 𝒗 si este lungimea segmentului la o scara data
2). Directia :
- este data de directia definita de suportul vectorului .
3). Sens :
- sensul cel indicat de sageata .
Ultimile doua caracteristici deosebesc marimile vectoriale de cele scalare , intalnite mai ales in
fizica .
Definitie vveeccttoorruull nnuull :
- se noteaza cu �� si este reprezentat prin orice punct din spatiu .
Definitie vveeccttoorrii eeggaallii :
- doi vectori care au aceeasi directie , acelasi sens si aceeasi marime se numesc vectori egali .
Definitie vveeccttoorrii ccoolliinniiaarrii :
- se numesc vectori coliniari doi vectori care au aceeasi directie indiferent de modul si sens .
- doi vectori sunt coliniari daca cel putin unul este nul sau daca amandoi sunt nenuli si au
aceeasi directie .
- vectorul nul este coliniar cu orice alt vector .
Definitie vveeccttoorrii nneeccoolliinniiaarrii :
- doi vectori nenuli care nu au aceeasi directie sunt vectori necoliniari .
Clasa a X + XI -a GEOMETRIE - 4
VECTORI
VECTORI
Definitie vveeccttoorrii lliibbeerrii :
- se numesc vectori liberi acei vectori al caror punct de aplicatie ( originea ) poate fi oriunde in
spatiu .
- operatiile cu vectori sunt definite pentru vectori liberi , iar operatiile cu celelalte categorii de
vectori se obtin din cele asupra vectorilor liberi functie de conditiile suplimentare ce se impun .
Definitie vveeccttoorrii oorrttooggoonnaallii :
- doi vectori care au dreptele suport perpendiculare se numesc ortogonali .
Definitie vveerrssoorr :
- vectorul liber cu modulul egal cu 𝟏 se numeste versor .
Definitie vveeccttoorrii lleeggaattii :
- se numesc vectori legati acei vectori care au originea intr-un anumit punct fix sau mobil .
- intalniti in mecanica , fizica .
Definitie vveeccttoorrii aalluunneeccaattoorrii :
- se numesc vectori alunecatori acei vectori al caror punct de aplicatie poate fi situat in orice
punct al dreptei suport , ei putand sa se deplaseze de-a lungul unei drepte fara ca actiunea lor sa se
modifice .
Clasa a X + XI -a GEOMETRIE - 5
VECTORI
VECTORI
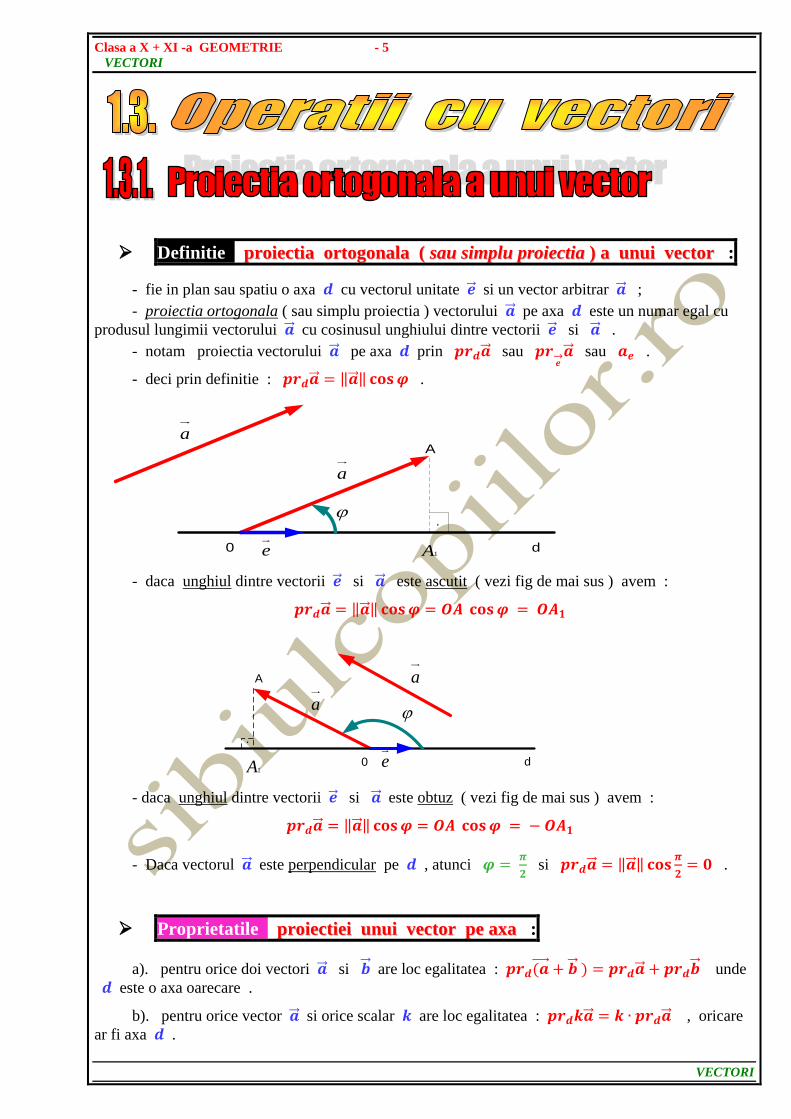
Definitie pprrooiieeccttiiaa oorrttooggoonnaallaa (( ssaauu ssiimmpplluu pprrooiieeccttiiaa )) aa uunnuuii vveeccttoorr :
- fie in plan sau spatiu o axa 𝒅 cu vectorul unitate �� si un vector arbitrar �� ;
- proiectia ortogonala ( sau simplu proiectia ) vectorului �� pe axa 𝒅 este un numar egal cu
produsul lungimii vectorului �� cu cosinusul unghiului dintre vectorii �� si �� .
- notam proiectia vectorului �� pe axa 𝒅 prin 𝒑𝒓𝒅�� sau 𝒑𝒓𝒆→�� sau 𝒂𝒆 .
- deci prin definitie : 𝒑𝒓𝒅�� = ‖�� ‖ 𝐜𝐨𝐬𝝋 .
a
a
e0 A1d
A
.
- daca unghiul dintre vectorii �� si �� este ascutit ( vezi fig de mai sus ) avem :
𝒑𝒓𝒅�� = ‖�� ‖ 𝐜𝐨𝐬𝝋 = 𝑶𝑨 𝐜𝐨𝐬𝝋 = 𝑶𝑨𝟏
a
a
0A1d
A
.
e
- daca unghiul dintre vectorii �� si �� este obtuz ( vezi fig de mai sus ) avem :
𝒑𝒓𝒅�� = ‖�� ‖ 𝐜𝐨𝐬𝝋 = 𝑶𝑨 𝐜𝐨𝐬𝝋 = − 𝑶𝑨𝟏
- Daca vectorul �� este perpendicular pe 𝒅 , atunci 𝝋 = 𝝅
𝟐 si 𝒑𝒓𝒅�� = ‖�� ‖ 𝐜𝐨𝐬
𝝅
𝟐= 𝟎 .
Proprietatile pprrooiieeccttiieeii uunnuuii vveeccttoorr ppee aaxxaa :
a). pentru orice doi vectori �� si �� are loc egalitatea : 𝒑𝒓𝒅(𝒂 + �� ) = 𝒑𝒓𝒅�� + 𝒑𝒓𝒅�� unde
𝒅 este o axa oarecare .
b). pentru orice vector �� si orice scalar 𝒌 are loc egalitatea : 𝒑𝒓𝒅𝒌�� = 𝒌 ∙ 𝒑𝒓𝒅�� , oricare
ar fi axa 𝒅 .
Clasa a X + XI -a GEOMETRIE - 6
VECTORI
VECTORI
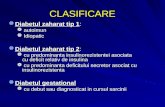
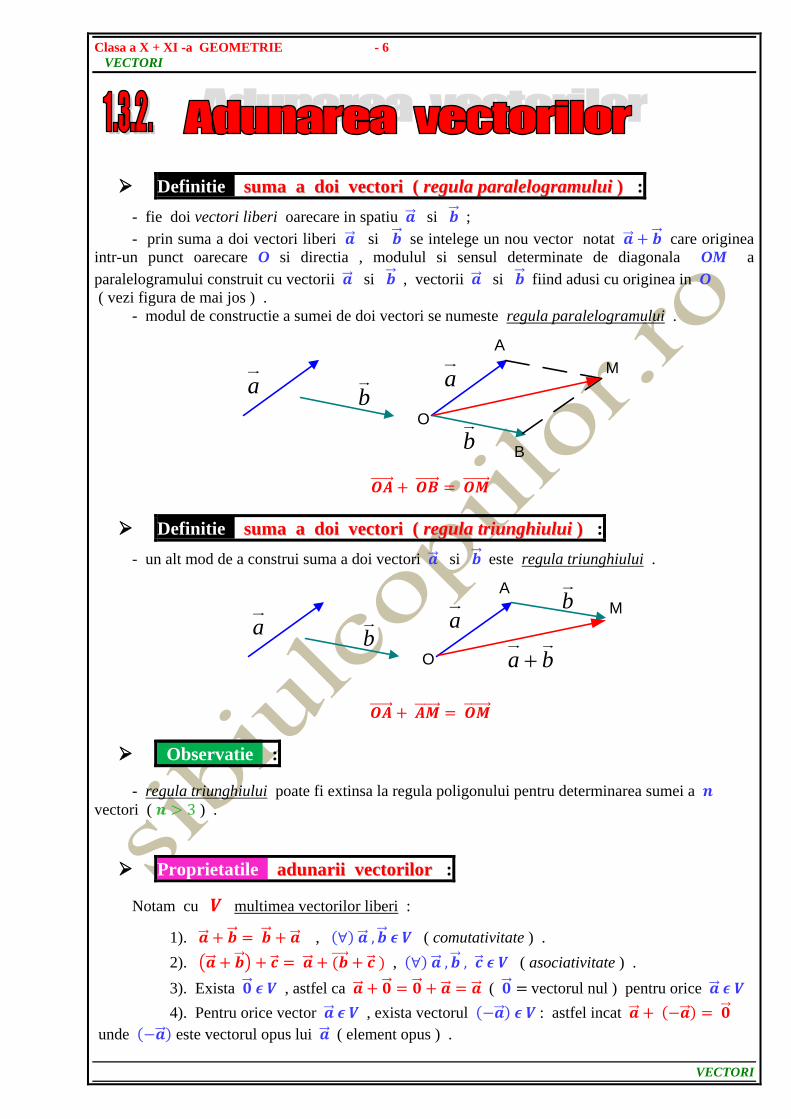
Definitie ssuummaa aa ddooii vveeccttoorrii (( rreegguullaa ppaarraalleellooggrraammuulluuii )) :
- fie doi vectori liberi oarecare in spatiu �� si �� ;
- prin suma a doi vectori liberi �� si �� se intelege un nou vector notat �� + �� care originea
intr-un punct oarecare O si directia , modulul si sensul determinate de diagonala OM a
paralelogramului construit cu vectorii �� si �� , vectorii �� si �� fiind adusi cu originea in O
( vezi figura de mai jos ) .
- modul de constructie a sumei de doi vectori se numeste regula paralelogramului .
O
A
B
a
b
ba
M
𝑶𝑨 + 𝑶𝑩 = 𝑶𝑴
Definitie ssuummaa aa ddooii vveeccttoorrii (( rreegguullaa ttrriiuunngghhiiuulluuii )) :
- un alt mod de a construi suma a doi vectori �� si �� este regula triunghiului .
O
A
ab
ba
ba
M
𝑶𝑨 + 𝑨𝑴 = 𝑶𝑴
Observatie :
- regula triunghiului poate fi extinsa la regula poligonului pentru determinarea sumei a 𝒏 vectori ( 𝒏 > 3 ) .
Proprietatile aadduunnaarriiii vveeccttoorriilloorr :
Notam cu 𝑽 multimea vectorilor liberi :
1). �� + �� = �� + �� , (∀) �� , �� 𝝐 𝑽 ( comutativitate ) .
2). (�� + �� ) + �� = �� + (𝒃 + �� ) , (∀) �� , �� , �� 𝝐 𝑽 ( asociativitate ) .
3). Exista �� 𝝐 𝑽 , astfel ca �� + �� = �� + �� = �� ( �� = vectorul nul ) pentru orice �� 𝝐 𝑽
4). Pentru orice vector �� 𝝐 𝑽 , exista vectorul (−�� ) 𝝐 𝑽 : astfel incat �� + (−�� ) = ��
unde (−�� ) este vectorul opus lui �� ( element opus ) .
Clasa a X + XI -a GEOMETRIE - 7
VECTORI
VECTORI
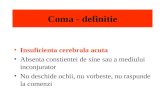
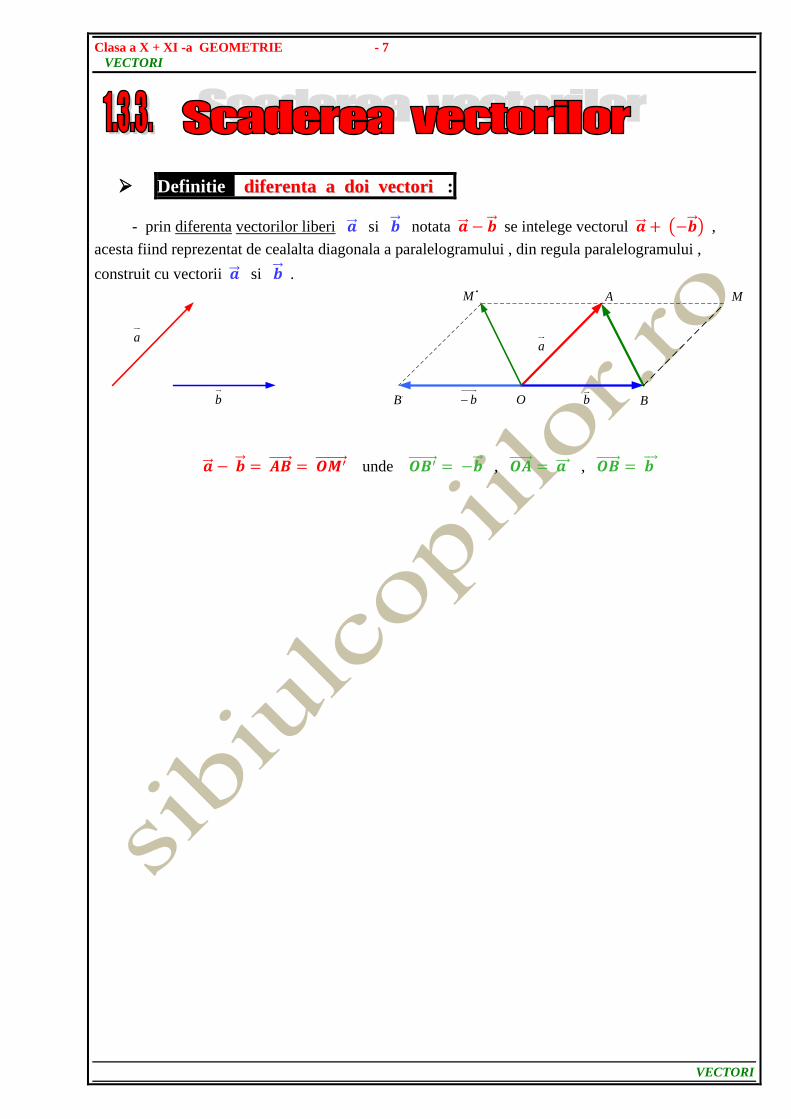
Definitie ddiiffeerreennttaa aa ddooii vveeccttoorrii :
- prin diferenta vectorilor liberi �� si �� notata �� − �� se intelege vectorul �� + (−�� ) ,
acesta fiind reprezentat de cealalta diagonala a paralelogramului , din regula paralelogramului ,
construit cu vectorii �� si �� .
M
M
B
A
OB,
a
bb
a
b
�� − �� = 𝑨𝑩 = 𝑶𝑴′ unde 𝑶𝑩′ = −�� , 𝑶𝑨 = 𝒂 , 𝑶𝑩 = 𝒃
Clasa a X + XI -a GEOMETRIE - 8
VECTORI
VECTORI
Definitie iinnmmuullttiirreeaa vveeccttoorriilloorr ccuu ssccaallaarrii :
Fie vectorul �� si scalarul 𝝀 ;
- prin produsul dintre scalarul 𝝀 si vectorul �� se intelege vectorul 𝝀 ∙ �� care are :
1). - aceeasi directie cu a vectorului �� ;
2). - modulul |𝝀 ∙ �� | = |𝝀| ∙ |�� | .
Fie �� ≠ �� , nenul , atunci :
- daca 𝝀 > 0 atunci 𝝀 ∙ �� are acelasi sens cu vectorul �� ;
- daca 𝝀 < 0 atunci 𝝀 ∙ �� are sens contrar cu vectorul �� .
Observatie :
- avem : 𝝀 ∙ �� = 𝟎 ⟺ 𝝀 = 𝟎 sau �� = 𝟎 .
Proprietatile iinnmmuullttiirriiii vveeccttoorriilloorr ccuu ssccaallaarrii :
Pentru (∀) �� , �� 𝝐 𝓥 si (∀) 𝜶 , 𝜷 𝝐 ℝ au loc urmatoarele :
1). 𝜶(�� + �� ) = 𝜶�� + 𝜶�� ;
2). 𝜶�� + 𝜷�� = (𝜶 + 𝜷)�� ;
3). 𝜶 ∙ (𝜷 ∙ �� ) = (𝜶 ∙ 𝜷) ∙ �� ;
4). 𝟏 ∙ �� = �� .
Definitie vveeccttoorrii ccoolliinniiaarrii :
- Se numesc vectori coliniari doi vectori care au aceeasi directie ( indiferent de modul si sens )
- doi vectori nenuli �� si �� sunt coliniari daca si numai daca exista 𝝀 𝝐 ℝ astfel incat
�� = 𝝀 ∙ ��
- vectorul nul este coliniar cu orice alt vector .
Clasa a X + XI -a GEOMETRIE - 9
VECTORI
VECTORI
Fie �� si �� doi vectori liberi ( in plan sau spatiu ) .
Definitie pprroodduussuull ssccaallaarr aa ddooii vveeccttoorrii :
- produsul scalar al vectorilor �� si �� este numarul real notat :
�� ∙ �� = |�� | ∙ |�� | ∙ 𝐜𝐨𝐬(�� , �� )
- mai notam 𝐜𝐨𝐬(�� , �� ) = 𝐜𝐨𝐬𝝋 , unde 𝝋 = unghiul vectorilor �� si �� .
- in concluzie , produsul scalar a doi vectori liberi este o marime scalara egala cu produsul
modulelor celor doi vectori inumltit cu cosinusul unghiului format de ei .
Proprietatile pprroodduussuulluuii ssccaallaarr :
(1). �� ∙ �� > 0 daca 𝝋 𝝐 (𝟎 ,𝝅
𝟐) si �� ≠ 𝟎 , �� ≠ 𝟎 ;
�� ∙ �� = 𝟎 daca 𝝋 = 𝝅
𝟐 sau �� = 𝟎 sau �� = 𝟎 ;
�� ∙ �� < 0 daca 𝝋 𝝐 (𝝅
𝟐 , 𝝅) si �� ≠ 𝟎 , �� ≠ 𝟎 .
(2). �� ∙ �� = �� ∙ �� ( comutativitate ) ;
(3). �� ∙ (�� + �� ) = �� ∙ �� + �� ∙ �� ( distributivitate ) ;
(4). �� ∙ �� = |�� |𝟐 ;
(5). - doi vectori nenuli sunt perpendiculari daca si numai daca produsul lor scalar este nul :
�� ≠ 𝟎 , �� ≠ 𝟎 , �� ∙ �� = 𝟎 ⟺ �� ⊥ ��
(6). - produsul scalar a doi vectori de acelasi sens este egal cu produsul modulelor lor :
�� , �� 𝒔𝒊 𝝋 = 𝟎 ⟹ �� ∙ �� = |�� | ∙ |�� |
(7). - patratul scalar al unui vector este egal cu patratul marimii lui :
(�� )𝟐 = |�� |𝟐
de aici se deduce formula care da modulul unui vector cu ajutorul produsului scalar :
|�� | = √�� ∙ ��
(8). - pentru a inmulti un produs scalar cu un factor scalar oarecare m se poate considera ca
m inmulteste pe unul din cei doi vectori :
𝒎 (�� ∙ �� ) = (𝒎 ∙ �� )�� = �� (𝒎 ∙ �� )
Clasa a X + XI -a GEOMETRIE - 10
VECTORI
VECTORI
Fie �� si �� doi vectori liberi ( in plan sau spatiu ) .
Definitie pprroodduussuull vveeccttoorriiaall aa ddooii vveeccttoorrii :
- produsul vectorial al vectorilor �� si �� este numarul real notat :
�� × �� = |�� | ∙ |�� | ∙ 𝐬𝐢𝐧(�� , �� ) sau �� × �� = |�� | ∙ |�� | ∙ 𝐬𝐢𝐧𝝋
- mai notam 𝐬𝐢𝐧(�� , �� ) = 𝐬𝐢𝐧𝝋 , unde 𝝋 = unghiul vectorilor �� si �� .
- in concluzie , produsul vectorial a doi vectori liberi este o marime scalara egala cu produsul
modulelor celor doi vectori inumltit cu sinusul unghiului format de ei .
Proprietatile pprroodduussuulluuii vveeccttoorriiaall :
(1). �� × �� > 0 daca 𝝋 𝝐 (𝟎 , 𝝅) si �� ≠ 𝟎 , �� ≠ 𝟎 ;
�� × �� = 𝟎 daca 𝝋 = 𝟎 , 𝝅 , 𝒌𝝅 sau �� = 𝟎 sau �� = 𝟎 ;
�� × �� < 0 daca 𝝋 𝝐 (𝝅 , 𝟐𝝅) si �� ≠ 𝟎 , �� ≠ 𝟎 .
(2). �� × �� = −�� × �� ;
(3). �� × (�� + �� ) = �� × �� + �� × �� distributiva la dreapta ,
(�� + �� ) × �� = �� × �� + �� × �� distributiva la stanga ;
(4). �� × �� ⊥ �� si �� × �� ⊥ �� ;
(5). - doi vectori nenuli sunt perpendiculari daca si numai daca :
�� ≠ 𝟎 , �� ≠ 𝟎 , �� × �� = |�� | ∙ |�� | ⟺ �� ⊥ ��
(6). - doi vectori nenuli sunt paraleli daca si numai daca :
�� ≠ 𝟎 , �� ≠ 𝟎 , �� × �� = �� ⟺ �� ∥ ��
(7). - pentru a inmulti un produs vectorial cu un factor scalar oarecare 𝝀 se poate considera ca
𝝀 inmulteste pe unul din cei doi vectori :
𝝀 (�� × �� ) = (𝝀 ∙ �� ) × �� = �� × (𝝀 ∙ �� )
(8). - dublul produs vectorial :
(�� × �� ) × �� = �� (�� ∙ �� ) − �� (�� ∙ �� )
(9). - identitati vectoriale :
(�� × �� ) × �� + (�� × �� ) × �� + (�� × �� ) × �� = ��
( �� × 𝒗 )𝟐 = 𝒖𝟐 ∙ 𝒗𝟐 − (�� ∙ �� )𝟐
(10). - produsul mixt a trei vectori : �� ∙ �� ∙ �� = (�� × �� ) ∙ ��
Clasa a X + XI -a GEOMETRIE - 11
VECTORI
VECTORI
Definitie vveeccttoorr ddee ppoozziittiiee :
- un punct oarecare 𝑴 din spatiu are pozitia perfect determinata daca se da un punct fix 𝑶 in
spatiu numit origine si se cunoaste vectorul 𝑶𝑴 = �� .
- punctul 𝑴 este extremitatea vectorului �� a carui origine este punctul fix 𝑶 .
- vectorul 𝑶𝑴 = �� care determina pozitia lui 𝑴 se numeste vectorul de pozitie al
punctului 𝑴 si se scrie : 𝑴( 𝒓 ) .
O
rM
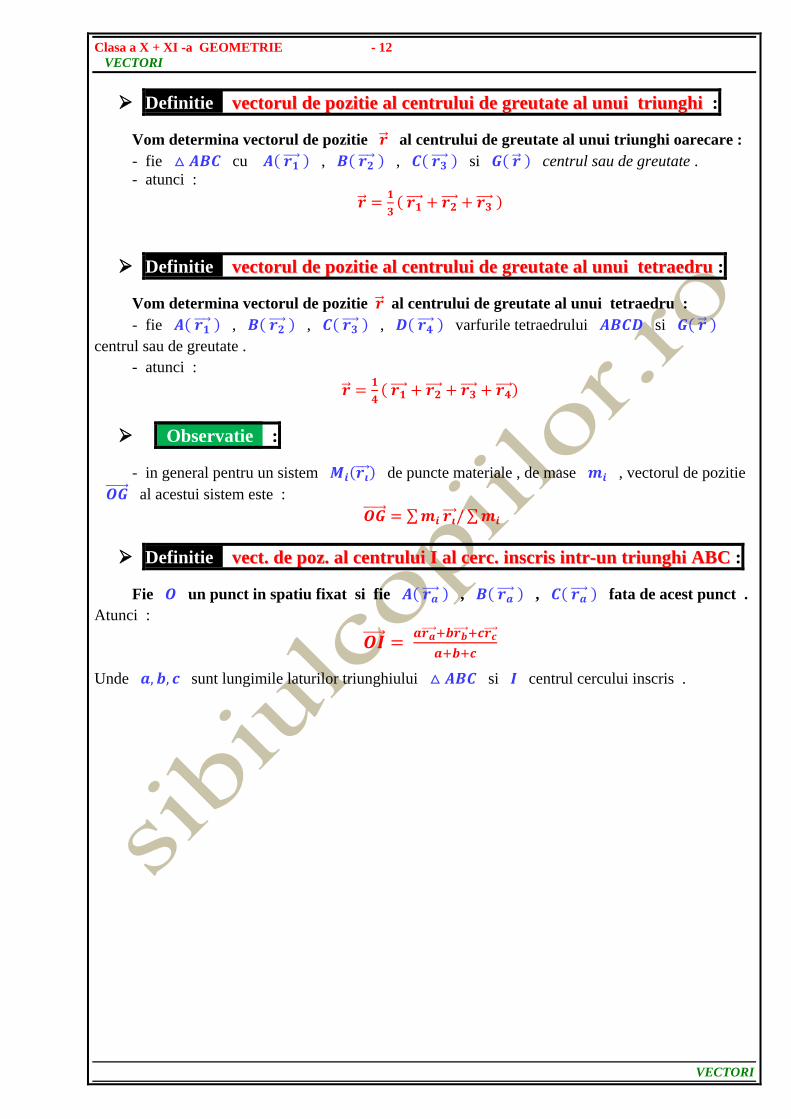
Definitie vveeccttoorruull ddee ppoozziittiiee ccaarree iimmppaarrttee uunn sseeggmmeenntt iinnttrr--uunn rraappoorrtt ddaatt :
Vectorul de pozitie �� al punctului 𝑴 care imparte un segment [𝑨𝑩] intr-un raport
dat 𝒌 unde
𝑨( �� ) , 𝑩( �� ) , 𝑴( �� ) , 𝑴𝑨
𝑴𝑩 =𝒌 ,
( 𝒌 < 0 daca 𝑴 ∈ (𝑨𝑩) si 𝒌 > 0 daca 𝑴 ∉ (𝑨𝑩) , 𝑴 ∈ 𝑨𝑩 )
este : �� = �� −𝒌��
𝟏 −𝒌 si 𝒌 ≠ 𝟏
O
B
A
M
Clasa a X + XI -a GEOMETRIE - 12
VECTORI
VECTORI
Definitie vveeccttoorruull ddee ppoozziittiiee aall cceennttrruulluuii ddee ggrreeuuttaattee aall uunnuuii ttrriiuunngghhii :
Vom determina vectorul de pozitie �� al centrului de greutate al unui triunghi oarecare :
- fie △ 𝑨𝑩𝑪 cu 𝑨( 𝒓𝟏 ) , 𝑩( 𝒓𝟐 ) , 𝑪( 𝒓𝟑 ) si 𝑮( �� ) centrul sau de greutate .
- atunci :
�� =𝟏
𝟑( 𝒓𝟏 + 𝒓𝟐 + 𝒓𝟑 )
Definitie vveeccttoorruull ddee ppoozziittiiee aall cceennttrruulluuii ddee ggrreeuuttaattee aall uunnuuii tteettrraaeeddrruu :
Vom determina vectorul de pozitie �� al centrului de greutate al unui tetraedru :
- fie 𝑨( 𝒓𝟏 ) , 𝑩( 𝒓𝟐 ) , 𝑪( 𝒓𝟑 ) , 𝑫( 𝒓𝟒 ) varfurile tetraedrului 𝑨𝑩𝑪𝑫 si 𝑮( �� )
centrul sau de greutate .
- atunci :
�� =𝟏
𝟒( 𝒓𝟏 + 𝒓𝟐 + 𝒓𝟑 + 𝒓𝟒 )
Observatie :
- in general pentru un sistem 𝑴𝒊(𝒓𝒊 ) de puncte materiale , de mase 𝒎𝒊 , vectorul de pozitie
𝑶𝑮 al acestui sistem este :
𝑶𝑮 = ∑𝒎𝒊 𝒓𝒊 / ∑𝒎𝒊
Definitie vveecctt.. ddee ppoozz.. aall cceennttrruulluuii II aall cceerrcc.. iinnssccrriiss iinnttrr--uunn ttrriiuunngghhii AABBCC :
Fie 𝑶 un punct in spatiu fixat si fie 𝑨( 𝒓𝒂 ) , 𝑩( 𝒓𝒂 ) , 𝑪( 𝒓𝒂 ) fata de acest punct .
Atunci :
𝑶𝑰 = 𝒂𝒓𝒂 +𝒃𝒓𝒃 +𝒄𝒓𝒄
𝒂+𝒃+𝒄
Unde 𝒂, 𝒃, 𝒄 sunt lungimile laturilor triunghiului △ 𝑨𝑩𝑪 si 𝑰 centrul cercului inscris .
Clasa a X + XI -a GEOMETRIE - 13
VECTORI
VECTORI
Definitie ccoonnddiittiiaa ddee ccoolliinniiaarriittaattee :
- Fie 𝑶 un punct fixat in spatiu si punctele 𝑿 si 𝒀 care au vectorii de pozitie 𝑿(�� ) si
respectiv 𝒀(�� ) .
- Conditia necesra si suficienta ca extremitatea vectorului 𝑶𝒁 = �� sa se gaseasca pe dreapta
𝑨𝑩 este ca in relatia de dependenta :
�� = 𝒎�� + 𝒏�� sa avem 𝒎 + 𝒏 = 𝟏
Definitie ccoonnddiittiiaa ddee ccooppllaannaarriittaattee :
Consideram trei vectori 𝑶𝑼 = �� , 𝑶𝑽 = �� , 𝑶𝑾 = �� avand originea comuna 𝑶 .
- conditia necesara si suficienta ca extremitatea 𝑨 a unui vector 𝑶𝑨 = �� sa se afle in planul
𝑼𝑽𝑾 , determinat de extremitatile vectorilor 𝑶𝑼 , 𝑶𝑽 , 𝑶𝑾 , este ca in relatia de dependenta :
�� = 𝒎�� + 𝒏�� + 𝒑�� sa avem 𝒎 + 𝒏 + 𝒑 = 𝟏
Clasa a X + XI -a GEOMETRIE - 14
VECTORI
VECTORI
Definitie aaxxaa ddee ccoooorrddoonnaattee :
- se numeste axa de coordonate o dreapta pe care sunt fixate : un punct 𝑶 ( numit origine ) ,
un segment 𝑶𝑴 , a carui lungime este egala cu unitatea si un sens pozitiv .
Definitie rreeppeerr ccaarrtteezziiaann iinn ppllaann :
- se numeste reper cartezian in plan un sistem format din doua axe 𝑶𝒙 si 𝑶𝒚 cu aceeasi
origine .
- un reper cartezian format cu axele 𝑶𝒙 si 𝑶𝒚 se noteaza 𝒙𝑶𝒚 .
- daca axele 𝑶𝒙 si 𝑶𝒚 sunt perpendiculare , reperul 𝒙𝑶𝒚 se numeste ortogonal ( sistem de
axe ortogonale ) .
- vom numi axa 𝑶𝒙 - abscisa ;
- vom numi axa 𝑶𝒚 - ordonata .
Teorema :
- intr-un reper cartezian , oricarui punct 𝑨 (𝒂 , 𝒃 ) din plan ii corespunde un singur vector
�� = ( 𝒂 , 𝒃 ) ∈ ℝ𝟐 si reciproc .
Definitie rreeppeerr ccaarrtteezziiaann iinn ssppaattiiuu :
- se numeste reper cartezian in spatiu un sistem format din trei axe 𝑶𝒙 , 𝑶𝒚 , 𝑶𝒛 cu
aceeasi origine 𝑶 si el se noteaza 𝒙𝑶𝒚𝒛 .
- daca axele 𝑶𝒙 , 𝑶𝒚 , 𝑶𝒛 sunt perpendiculare doua cate doua , atunci avem un :
reper ortogonal sau un sitem de axe ortogonale ale spatiului
unde 𝑂𝑥 ( abscisa ) , 𝑶𝒚 ( ordonata ) iar 𝑶𝒛 ( cota ) .
Teorema :
- intr-un reper cartezian , oricarui punct 𝑴(𝒂, 𝒃. 𝒄) ii corespunde un singur vector
�� = ( 𝒂 , 𝒃, 𝒄 ) ∈ ℝ𝟑 si reciproc
pt orice vector ( 𝒂 , 𝒃, 𝒄 ) ∈ ℝ𝟑 exista un punct unic 𝑴(𝒂, 𝒃. 𝒄) unde 𝒂, 𝒃, 𝒄 sunt coordonatele
punctului 𝑴 sau ( componentele ) coordonatele vectorului �� .
Clasa a X + XI -a GEOMETRIE - 15
VECTORI
VECTORI
Definitie ccaaddrraannee :
- un reper cartezian in plan determina o impartire a planului in patru regiuni , numite cadrane ,
marcate cu cifrele romane 𝑰 , 𝑰𝑰 , 𝑰𝑰𝑰 , 𝑰𝑽 si definite dupa cum urmeaza :
𝑰 = {𝑴(𝒙, 𝒚) ∕ 𝒙 > 0, 𝑦 > 0} 𝑰𝑰 = {𝑴(𝒙, 𝒚) ∕ 𝒙 < 0, 𝑦 > 0}
𝑰𝑰𝑰 = {𝑴(𝒙, 𝒚) ∕ 𝒙 < 0, 𝑦 < 0} 𝑰𝑽 = {𝑴(𝒙, 𝒚) ∕ 𝒙 > 0, 𝑦 < 0}
Teorema distanta dintre doua puncte in plan :
- daca 𝑨(𝒙𝟏 , 𝒚𝟏) si 𝑩(𝒙𝟐 , 𝒚𝟐) sunt doua puncte din plan , atunci distanta dintre ele este :
𝑨𝑩 = √(𝒙𝟏 − 𝒙𝟐)𝟐 + (𝒚𝟏 − 𝒚𝟐)
𝟐
Teorema distanta dintre doua puncte in spatiu :
- daca 𝑨(𝒙𝟏, 𝒚𝟏, 𝒛𝟏) si 𝑩(𝒙𝟐, 𝒚𝟐, 𝒛𝟐) sunt doua puncte din spatiu , atunci distanta dintre ele este :
𝑨𝑩 = √(𝒙𝟏 − 𝒙𝟐)𝟐 + (𝒚𝟏 − 𝒚𝟐)
𝟐 + (𝒛𝟏 − 𝒛𝟐)𝟐
Clasa a X + XI -a GEOMETRIE - 16
VECTORI
VECTORI
Fie :
- un plan in care se considera reperul cartezian ortogonal 𝒙𝑶𝒚 , 𝑶𝒙 ⊥ 𝑶𝒚 ;
- consideram vectorii 𝒊 si 𝒋 cu proprietatea : | 𝒊 | = | 𝒋 | = 𝟏 numiti versori sau vectori
unitate ;
- pe axa 𝑶𝒙 consideram versorul 𝒊 , iar pe axa 𝑶𝒚 consideram versorul 𝒋 ;
- cuplul ( 𝒊 , 𝒋 ) se numeste baza ortonormata pentru multimea vectorilor din planul 𝒙𝑶𝒚 ;
- reperul (𝑶 , 𝒊 , 𝒋 ) se numeste reper cartezian ortonormat .
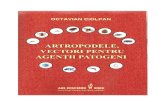
Definitie vveeccttoorr ddee ppoozziittiiee iinn xxOOyy :
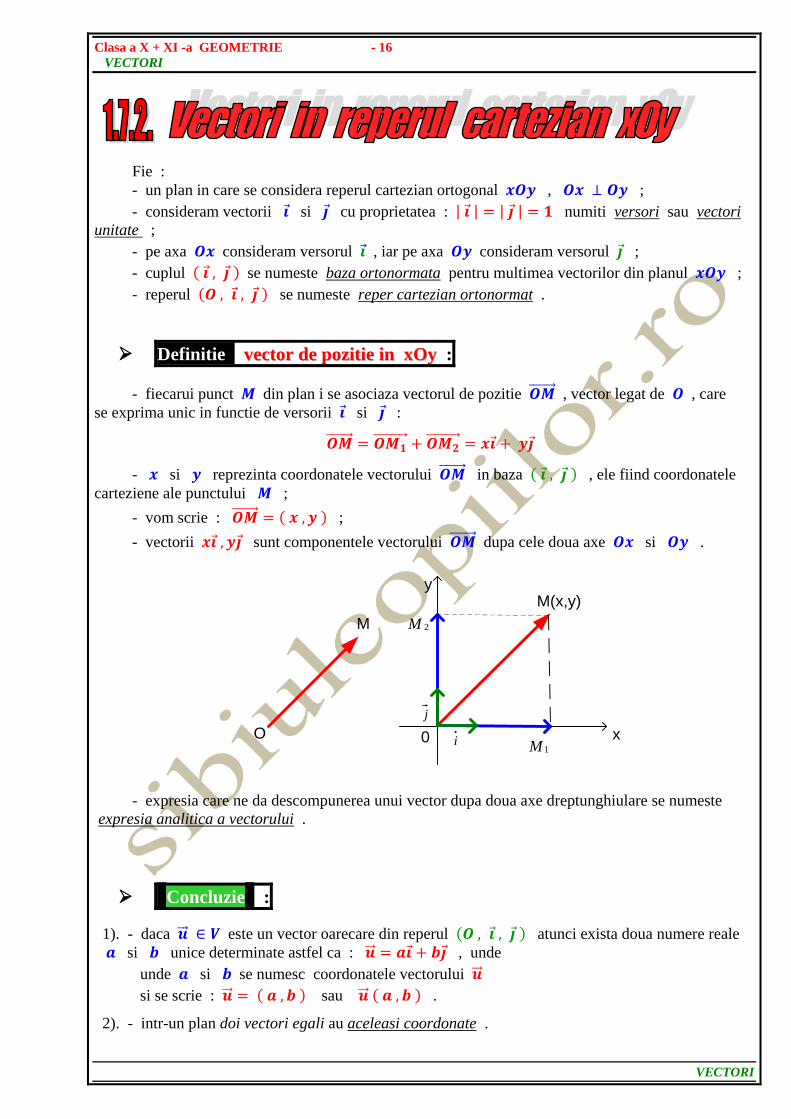
- fiecarui punct 𝑴 din plan i se asociaza vectorul de pozitie 𝑶𝑴 , vector legat de 𝑶 , care
se exprima unic in functie de versorii 𝒊 si 𝒋 :
𝑶𝑴 = 𝑶𝑴𝟏 + 𝑶𝑴𝟐
= 𝒙𝒊 + 𝒚𝒋
- 𝒙 si 𝒚 reprezinta coordonatele vectorului 𝑶𝑴 in baza ( 𝒊 , 𝒋 ) , ele fiind coordonatele
carteziene ale punctului 𝑴 ;
- vom scrie : 𝑶𝑴 = ( 𝒙 , 𝒚 ) ;
- vectorii 𝒙𝒊 , 𝒚𝒋 sunt componentele vectorului 𝑶𝑴 dupa cele doua axe 𝑶𝒙 si 𝑶𝒚 .
0 x
yM(x,y)
i
j
M 1
M 2M
O
- expresia care ne da descompunerea unui vector dupa doua axe dreptunghiulare se numeste
expresia analitica a vectorului .
Concluzie :
1). - daca �� ∈ 𝑽 este un vector oarecare din reperul (𝑶 , 𝒊 , 𝒋 ) atunci exista doua numere reale
𝒂 si 𝒃 unice determinate astfel ca : �� = 𝒂𝒊 + 𝒃𝒋 , unde
unde 𝒂 si 𝒃 se numesc coordonatele vectorului ��
si se scrie : �� = ( 𝒂 , 𝒃 ) sau �� ( 𝒂 , 𝒃 ) .
2). - intr-un plan doi vectori egali au aceleasi coordonate .
Clasa a X + XI -a GEOMETRIE - 17
VECTORI
VECTORI
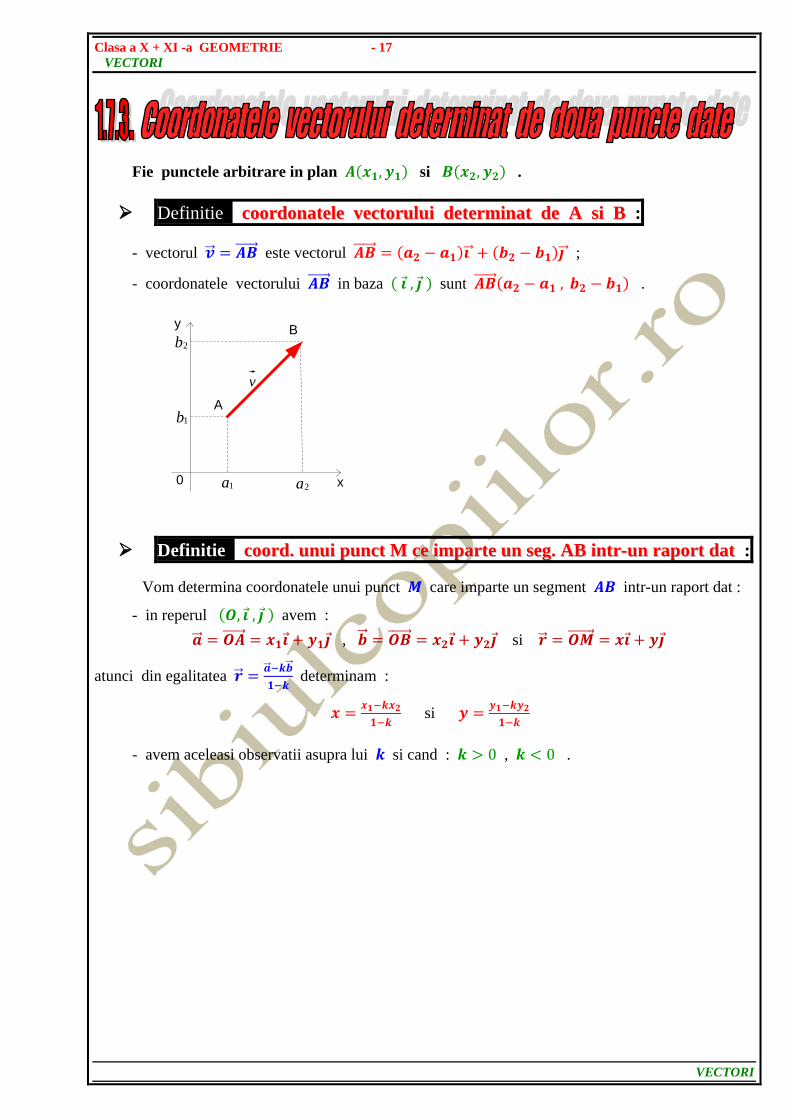
Fie punctele arbitrare in plan 𝑨(𝒙𝟏, 𝒚𝟏) si 𝑩(𝒙𝟐, 𝒚𝟐) .
Definitie ccoooorrddoonnaatteellee vveeccttoorruulluuii ddeetteerrmmiinnaatt ddee AA ssii BB :
- vectorul �� = 𝑨𝑩 este vectorul 𝑨𝑩 = (𝒂𝟐 − 𝒂𝟏)𝒊 + (𝒃𝟐 − 𝒃𝟏)𝒋 ;
- coordonatele vectorului 𝑨𝑩 in baza ( 𝒊 , 𝒋 ) sunt 𝑨𝑩 (𝒂𝟐 − 𝒂𝟏 , 𝒃𝟐 − 𝒃𝟏) .
x
y
0
A
B
v
a1 a2
b1
b2
Definitie ccoooorrdd.. uunnuuii ppuunncctt MM ccee iimmppaarrttee uunn sseegg.. AABB iinnttrr--uunn rraappoorrtt ddaatt :
Vom determina coordonatele unui punct 𝑴 care imparte un segment 𝑨𝑩 intr-un raport dat :
- in reperul (𝑶, 𝒊 , 𝒋 ) avem :
�� = 𝑶𝑨 = 𝒙𝟏𝒊 + 𝒚𝟏𝒋 , �� = 𝑶𝑩 = 𝒙𝟐𝒊 + 𝒚𝟐𝒋 si �� = 𝑶𝑴 = 𝒙𝒊 + 𝒚𝒋
atunci din egalitatea �� =�� −𝒌��
𝟏−𝒌 determinam :
𝒙 =𝒙𝟏−𝒌𝒙𝟐
𝟏−𝒌 si 𝒚 =
𝒚𝟏−𝒌𝒚𝟐
𝟏−𝒌
- avem aceleasi observatii asupra lui 𝒌 si cand : 𝒌 > 0 , 𝒌 < 0 .
Clasa a X + XI -a GEOMETRIE - 18
VECTORI
VECTORI
Definitie mmoodduulluull vveeccttoorruulluuii :
- modulul vectorului 𝑶𝑴 = �� = 𝒙𝒊 + 𝒚𝒋 este : |�� | = √𝒙𝟐 + 𝒚𝟐 .
Definitie ccoooorrddoonnaatteellee ssuummeeii aa ddooii vveeccttoorrii :
- fie vectorii �� = 𝒙𝟏𝒊 + 𝒚𝟏𝒋 si �� = 𝒙𝟐𝒊 + 𝒚𝟐𝒋 sau �� (𝒙𝟏, 𝒚𝟏) si �� (𝒙𝟐, 𝒚𝟐)
- avem :
�� + �� = (𝒙𝟏 + 𝒙𝟐)𝒊 + (𝒚𝟏 + 𝒚𝟐)𝒋 sau (�� + �� )(𝒙𝟏 + 𝒙𝟐 , 𝒚𝟏 + 𝒚𝟐)
Definitie ccoooorrddoonnaatteellee pprroodduussuulluuii uunnuuii vveeccttoorr ccuu uunn nnrr.. rreeaall :
- fie vectorul �� = 𝒙𝒊 + 𝒚𝒋 si numarul real 𝜶 ;
- avem :
𝜶 ∙ �� = 𝜶𝒙𝒊 + 𝜶𝒚𝒋 sau 𝜶 ∙ �� = (𝜶𝒙 , 𝜶𝒚)
Definitie ccoooorrddoonnaatteellee pprroodduussuulluuii aa ddooii vveeccttoorrii :
- fie vectorii �� = 𝒙𝟏𝒊 + 𝒚𝟏𝒋 si �� = 𝒙𝟐𝒊 + 𝒚𝟐𝒋 sau �� (𝒙𝟏, 𝒚𝟏) si �� (𝒙𝟐, 𝒚𝟐)
- avem :
�� ∙ �� = (𝒙𝟏𝒊 + 𝒚𝟏𝒋 ) ∙ (𝒙𝟐𝒊 + 𝒚𝟐𝒋 ) = 𝒙𝟏𝒙𝟐 + 𝒚𝟏𝒚𝟐 - Observatii :
𝒊 ∙ 𝒊 = 𝒋 ∙ 𝒋 = 𝟏 iar 𝒊 ∙ 𝒋 = 𝒋 ∙ 𝒊 = 𝟎
Definitie ccoossiinnuussuull uunngghhiiuulluuii ddiinnttrree ddooii vveeccttoorrii :
- fie vectorii �� = 𝒙𝟏𝒊 + 𝒚𝟏𝒋 si �� = 𝒙𝟐𝒊 + 𝒚𝟐𝒋 , iar 𝜶 unghiul dintre vectorii �� si ��
- atunci cosinusul unghiului 𝜶 este :
𝐜𝐨𝐬𝜶 =�� ∙��
|�� |∙|�� |=
𝒙𝟏∙𝒙𝟐+𝒚𝟏∙𝒚𝟐
√𝒙𝟏𝟐+𝒚𝟏
𝟐∙√𝒙𝟐𝟐+𝒚𝟐
𝟐
Clasa a X + XI -a GEOMETRIE - 19
VECTORI
VECTORI
Conditia ddee ppaarraalleelliissmm aa ddooii vveeccttoorrii :
- fie vectorii �� = 𝒙𝟏𝒊 + 𝒚𝟏𝒋 si �� = 𝒙𝟐𝒊 + 𝒚𝟐𝒋 ;
- vectorii �� si �� sunt paraleli si scriem :
�� ∥ �� ⟺ 𝒙𝟏
𝒙𝟐=
𝒚𝟏
𝒚𝟐 , pentru 𝒙𝟐 ≠ 𝟎 , 𝒚𝟐 ≠ 𝟎
- Important : in cazul in care un numitor se anuleaza , atunci se anuleaza si numaratorul !!!
Conditia ddee ppeerrppeennddiiccuullaarriittaattee aa ddooii vveeccttoorrii :
- fie vectorii �� = 𝒙𝟏𝒊 + 𝒚𝟏𝒋 si �� = 𝒙𝟐𝒊 + 𝒚𝟐𝒋 ;
- vectorii �� si �� sunt perpendiculari si scriem :
�� ⊥ �� ⟺ 𝒙𝟏𝒙𝟐 + 𝒚𝟏𝒚𝟐 = 𝟎 sau 𝐜𝐨𝐬𝜶 = 𝟎 unde 𝜶 =𝝅
𝟐
Conditia ddee ccoolliinniiaarriittaattee aa ttrreeii ppuunnccttee :
- trei puncte distincte 𝑨(𝒙𝟏, 𝒚𝟏) , 𝑩(𝒙𝟐, 𝒚𝟐) si 𝑪(𝒙𝟑, 𝒚𝟑) sunt coliniare daca :
𝒙𝟐−𝒙𝟏
𝒙𝟑−𝒙𝟏=
𝒚𝟐−𝒚𝟏
𝒚𝟑−𝒚𝟏 cu conditia 𝒙𝟑 ≠ 𝒙𝟏 , 𝒚𝟑 ≠ 𝒚𝟏
sau
- conditia de coliniaritate a trei puncte 𝑨(𝒙𝟏, 𝒚𝟏) , 𝑩(𝒙𝟐, 𝒚𝟐) si 𝑪(𝒙𝟑, 𝒚𝟑) este sa existe un
numar real 𝒂 ∈ ℝ astfel incat :
𝑨𝑩 = 𝒂 ∙ 𝑨𝑪 ⟺ 𝒙𝟐−𝒙𝟏
𝒙𝟑−𝒙𝟏=
𝒚𝟐−𝒚𝟏
𝒚𝟑−𝒚𝟏 , 𝒙𝟑 ≠ 𝒙𝟏 , 𝒚𝟑 ≠ 𝒚𝟏
Clasa a X + XI -a GEOMETRIE - 20
VECTORI
VECTORI
Definitie rreeppeerr ccaarrtteezziiaann iinn ssppaattiiuu :
- se numeste reper cartezian in spatiu un sistem format din trei axe 𝑶𝒙 , 𝑶𝒚 , 𝑶𝒛 cu
aceeasi origine 𝑶 si el se noteaza 𝒙𝑶𝒚𝒛 .
- daca axele 𝑶𝒙 , 𝑶𝒚 , 𝑶𝒛 sunt perpendiculare doua cate doua , atunci avem un :
reper ortogonal sau un sitem de axe ortogonale ale spatiului
unde 𝑶𝒙 ( abscisa ) , 𝑶𝒚 ( ordonata ) iar 𝑶𝒛 ( cota ) .
Definitie rreeppeerr oorrttoonnoorrmmaatt iinn ssppaattiiuu :
- fie versorii 𝒊 , 𝒋 si �� , | 𝒊 | = | 𝒋 | = | 𝒌 | = 𝟏 , unde 𝒊 ∈ 𝑶𝒙 , 𝒋 ∈ 𝑶𝒚 iar �� ∈ 𝑶𝒛 ,
cu proprietatea 𝒊 ⊥ 𝒋 ⊥ �� atunci reperul (𝑶 , 𝒊 , �� , 𝒌 ) se numeste reper ortonormat in spatiu .
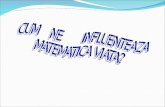
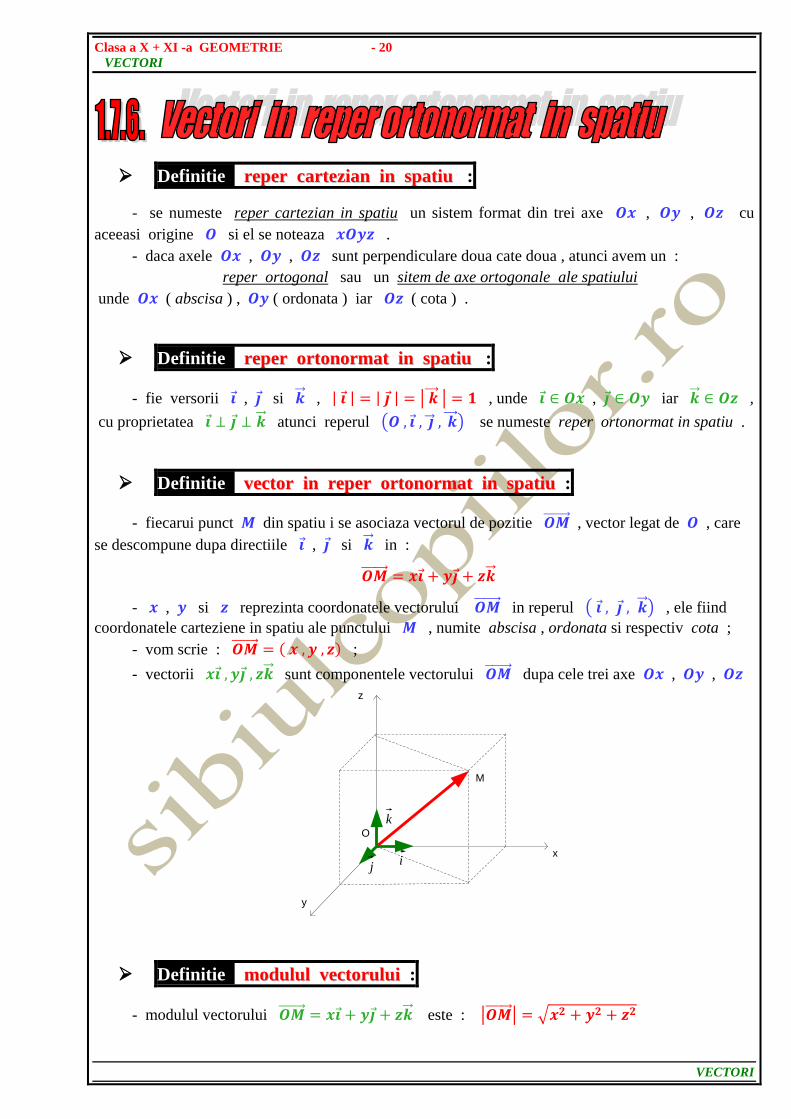
Definitie vveeccttoorr iinn rreeppeerr oorrttoonnoorrmmaatt iinn ssppaattiiuu :
- fiecarui punct 𝑴 din spatiu i se asociaza vectorul de pozitie 𝑶𝑴 , vector legat de 𝑶 , care
se descompune dupa directiile 𝒊 , 𝒋 si �� in :
𝑶𝑴 = 𝒙𝒊 + 𝒚𝒋 + 𝒛��
- 𝒙 , 𝒚 si 𝒛 reprezinta coordonatele vectorului 𝑶𝑴 in reperul ( 𝒊 , 𝒋 , �� ) , ele fiind
coordonatele carteziene in spatiu ale punctului 𝑴 , numite abscisa , ordonata si respectiv cota ;
- vom scrie : 𝑶𝑴 = ( 𝒙 , 𝒚 , 𝒛) ;
- vectorii 𝒙𝒊 , 𝒚𝒋 , 𝒛�� sunt componentele vectorului 𝑶𝑴 dupa cele trei axe 𝑶𝒙 , 𝑶𝒚 , 𝑶𝒛
x
z
y
O
M
ij
k
Definitie mmoodduulluull vveeccttoorruulluuii :
- modulul vectorului 𝑶𝑴 = 𝒙𝒊 + 𝒚𝒋 + 𝒛�� este : |𝑶𝑴 | = √𝒙𝟐 + 𝒚𝟐 + 𝒛𝟐
Clasa a X + XI -a GEOMETRIE - 21
VECTORI
VECTORI
Definitie ccoooorrddoonnaatteellee vveeccttoorruulluuii ddeetteerrmmiinnaatt ddee ddoouuaa ppuunnccttee :
- fie 𝑴𝟏(𝒙𝟏, 𝒚𝟏, 𝒛𝟏) si 𝑴𝟐(𝒙𝟐, 𝒚𝟐, 𝒛𝟐) doua puncte din spatiu atunci avem vectorul :
𝑴𝟏𝑴𝟐 = (𝒙𝟐 − 𝒙𝟏)𝒊 + (𝒚𝟐 − 𝒚𝟏)𝒋 + (𝒛𝟐 − 𝒛𝟏)��
- coordonatele vectorului 𝑴𝟏𝑴𝟐 in baza ( 𝒊 , 𝒋 , �� ) sunt (𝒙𝟐 − 𝒙𝟏 , 𝒚𝟐 − 𝒚𝟏 , 𝒛𝟐 − 𝒛𝟏)
Definitie mmoodduulluull vveeccttoorruulluuii ddeetteerrmmiinnaatt ddee ddoouuaa ppuunnccttee :
- fie 𝑴𝟏(𝒙𝟏, 𝒚𝟏, 𝒛𝟏) si 𝑴𝟐(𝒙𝟐, 𝒚𝟐, 𝒛𝟐) doua puncte din spatiu ;
- modulul vectorului 𝑴𝟏𝑴𝟐 este : |𝑴𝟏𝑴𝟐
| = √(𝒙𝟐 − 𝒙𝟏)𝟐 + (𝒚𝟐 − 𝒚𝟏)
𝟐 + (𝒛𝟐 − 𝒛𝟏)𝟐
- modulul vectorului 𝑴𝟏𝑴𝟐 este egal cu lungimea diagonalei paralelipipedului dreptunghic .
Definitie ssuummaa aa ddooii vveeccttoorrii ddaattii pprriinn ccoooorrddoonnaattee :
- fie vectorii �� = 𝒙𝟏𝒊 + 𝒚𝟏𝒋 + 𝒛𝟏�� si �� = 𝒙𝟐𝒊 + 𝒚𝟐𝒋 + 𝒛𝟐��
- avem , ca si in plan , vectorul suma : (�� + �� )(𝒙𝟏 + 𝒙𝟐 , 𝒚𝟏 + 𝒚𝟐 , 𝒛𝟏 + 𝒛𝟐) sau :
�� + �� = (𝒙𝟏 + 𝒙𝟐)𝒊 + (𝒚𝟏 + 𝒚𝟐)𝒋 + (𝒛𝟏 + 𝒛𝟐)��
Definitie pprroodduussuull uunnuuii vveeccttoorr ccuu uunn nnrr.. rreeaall ddaatt pprriinn ccoooorrddoonnaattee :
- fie vectorul �� = 𝒙𝟏𝒊 + 𝒚𝟏𝒋 + 𝒛𝟏�� si numarul real 𝜶 ;
- avem :
𝜶 ∙ �� = 𝜶𝒙𝟏𝒊 + 𝜶𝒚𝟏𝒋 + 𝜶𝒛𝟏�� sau 𝜶 ∙ �� = (𝜶𝒙𝟏 , 𝜶𝒚𝟏 , 𝜶𝒛𝟏) , ∀ 𝜶 ∈ ℝ
Definitie pprroodduussuull ssccaallaarr aa ddooii vveeccttoorrii ddaattii pprriinn ccoooorrddoonnaattee :
- fie vectorii �� = 𝒙𝟏𝒊 + 𝒚𝟏𝒋 + 𝒛𝟏�� si �� = 𝒙𝟐𝒊 + 𝒚𝟐𝒋 + 𝒛𝟐��
- avem :
�� ∙ �� = (𝒙𝟏𝒊 + 𝒚𝟏𝒋 + 𝒛𝟏�� ) ∙ (𝒙𝟐𝒊 + 𝒚𝟐𝒋 + 𝒛𝟐�� ) = 𝒙𝟏𝒙𝟐 + 𝒚𝟏𝒚𝟐 + 𝒛𝟏𝒛𝟐
- Observatii :
𝒊 ∙ 𝒊 = 𝒋 ∙ 𝒋 = �� ∙ �� = 𝟏 iar 𝒊 ∙ 𝒋 = 𝒊 ∙ �� = �� ∙ 𝒋 = 𝟎
Definitie ccoossiinnuussuull uunngghhiiuulluuii ddiinnttrree ddooii vveeccttoorrii iinn ssppaattiiuu :
- fie vectorii �� = 𝒙𝟏𝒊 + 𝒚𝟏𝒋 + 𝒛𝟏�� si �� = 𝒙𝟐𝒊 + 𝒚𝟐𝒋 + 𝒛𝟐�� , iar 𝜶 unghiul dintre vectorii
�� si �� ;
- atunci cosinusul unghiului 𝜶 este : 𝐜𝐨𝐬𝜶 =�� ∙��
|�� |∙|�� |=
𝒙𝟏∙𝒙𝟐+𝒚𝟏∙𝒚𝟐+𝒛𝟏∙𝒛𝟐
√𝒙𝟏𝟐+𝒚𝟏
𝟐+𝒛𝟏𝟐∙√𝒙𝟐
𝟐+𝒚𝟐𝟐+𝒛𝟐
𝟐
Clasa a X + XI -a GEOMETRIE - 22
VECTORI
VECTORI
Conditia ddee ppaarraalleelliissmm aa ddooii vveeccttoorrii iinn ssppaattiiuu :
- fie vectorii �� = 𝒙𝟏𝒊 + 𝒚𝟏𝒋 + 𝒛𝟏�� si �� = 𝒙𝟐𝒊 + 𝒚𝟐𝒋 + 𝒛𝟐�� ;
- vectorii �� si �� sunt paraleli si scriem :
�� ∥ �� ⟺ 𝒙𝟏
𝒙𝟐=
𝒚𝟏
𝒚𝟐=
𝒛𝟏
𝒛𝟐 , pentru 𝒙𝟐, 𝒚𝟐, 𝒛𝟐 ≠ 𝟎
- Important : in cazul in care un numitor se anuleaza , atunci se anuleaza si numaratorul !!!
Conditia ddee ppeerrppeennddiiccuullaarriittaattee aa ddooii vveeccttoorrii iinn ssppaattiiuu :
- fie vectorii �� = 𝒙𝟏𝒊 + 𝒚𝟏𝒋 + 𝒛𝟏�� si �� = 𝒙𝟐𝒊 + 𝒚𝟐𝒋 + 𝒛𝟐�� ;
- vectorii �� si �� sunt perpendiculari si scriem :
�� ⊥ �� ⟺ 𝒙𝟏𝒙𝟐 + 𝒚𝟏𝒚𝟐 + 𝒛𝟏𝒛𝟐 = 𝟎 sau 𝐜𝐨𝐬𝜶 = 𝟎 unde 𝜶 =𝝅
𝟐
Conditia ddee ccoolliinniiaarriittaattee aa ttrreeii ppuunnccttee iinn ssppaattiiuu :
- trei puncte distincte 𝑨(𝒙𝟏, 𝒚𝟏, 𝒛𝟏) , 𝑩(𝒙𝟐, 𝒚𝟐, 𝒛𝟐) si 𝑪(𝒙𝟑, 𝒚𝟑, 𝒛𝟑) sunt coliniare daca :
𝒙𝟐−𝒙𝟏
𝒙𝟑−𝒙𝟏=
𝒚𝟐−𝒚𝟏
𝒚𝟑−𝒚𝟏=
𝒛𝟐−𝒛𝟏
𝒛𝟑−𝒛𝟏 cu conditia 𝒙𝟑 ≠ 𝒙𝟏 , 𝒚𝟑 ≠ 𝒚𝟏 , 𝒛𝟑 ≠ 𝒛𝟏
Definitie ccoooorrdd.. uunnuuii ppuunncctt ccaarree iimmppaarrttee uunn sseeggmmeenntt iinnttrr--uunn rraappoorrtt :
- coordonatele unui punct 𝑴(𝒙, 𝒚, 𝒛) care imparte un segment 𝑨𝑩 intr-un raport 𝒌 , adica
𝑴𝑨 = 𝒌 ∙ 𝑴𝑩 sunt :
𝒙 =𝒙𝟏−𝒌𝒙𝟐
𝟏−𝒌 , 𝒚 =
𝒚𝟏−𝒌𝒚𝟐
𝟏−𝒌 , 𝒛 =
𝒛𝟏−𝒌𝒛𝟐
𝟏−𝒌
Definitie eexxpprreessiiaa vveerrssoorruulluuii uunneeii ddiirreeccttiiii ooaarreeccaarree :
- fie �� un vector care face cu axele 𝑶𝒙, 𝑶𝒚,𝑶𝒛 unghiurile de masuri 𝜶 , 𝜷 respectiv 𝜸 ;
- cum �� = 𝒙𝒊 + 𝒚𝒋 + 𝒛�� si 𝒙 = |�� | 𝐜𝐨𝐬𝜶 , 𝒚 = |�� | 𝐜𝐨𝐬𝜷 , 𝒛 = |�� | 𝐜𝐨𝐬 𝜸
se obtine expresia versorului unei directii oarecare �� notata 𝒖𝟎 astfel :
𝒖𝟎 = 𝒊 𝐜𝐨𝐬𝜶 + 𝒋 𝐜𝐨𝐬𝜷 + �� 𝐜𝐨𝐬𝜸
- din relatiile anterioare 𝒙 = |�� | 𝐜𝐨𝐬𝜶 , 𝒚 = |�� | 𝐜𝐨𝐬𝜷 , 𝒛 = |�� | 𝐜𝐨𝐬 𝜸 obtinem :
𝐜𝐨𝐬𝜶 =𝒙
√𝒙𝟐+𝒚𝟐+𝒛𝟐 , 𝐜𝐨𝐬𝜷 =
𝒚
√𝒙𝟐+𝒚𝟐+𝒛𝟐 , 𝐜𝐨𝐬𝜸 =
𝒛
√𝒙𝟐+𝒚𝟐+𝒛𝟐
care se mai numesc cosinusurile directoare ale directiei 𝒖𝟎 .
- coordonatele versorului 𝒖𝟎 sunt tripletele (𝐜𝐨𝐬𝜶 , 𝐜𝐨𝐬𝜷 , 𝐜𝐨𝐬 𝜸) .
Clasa a X + XI -a GEOMETRIE - 23
VECTORI
VECTORI
Definitie uunngghhiiuull aa ddoouuaa ddiirreeccttiiii iinn ssppaattiiuu :
In cele ce urmeaza vom determina unghiul a doua directii in spatiu exprimat cu ajutorul
unghiurilor pe care acestea le fac cu axele de coordonate :
- fie vectorii �� si �� cu cei doi versori ai directiei lor :
𝒖𝟎 = 𝒊 𝐜𝐨𝐬𝜶𝟏 + 𝒋 𝐜𝐨𝐬𝜷𝟏 + �� 𝐜𝐨𝐬𝜸𝟏 si 𝒗𝟎 = 𝒊 𝐜𝐨𝐬𝜶𝟐 + 𝒋 𝐜𝐨𝐬𝜷𝟐 + �� 𝐜𝐨𝐬𝜸𝟐
- produsul scalar al lor ne conduce la :
𝒖𝟎 ∙ 𝒗𝟎 = 𝐜𝐨𝐬𝜽 , unde 𝜽 = 𝒎( 𝒖𝟎 , 𝒗𝟎 ) Prin urmare :
𝐜𝐨𝐬 𝜽 = 𝐜𝐨𝐬𝜶𝟏 𝐜𝐨𝐬𝜶𝟐 + 𝐜𝐨𝐬𝜷𝟏 𝐜𝐨𝐬𝜷𝟐 + 𝐜𝐨𝐬𝜸𝟏 𝐜𝐨𝐬 𝜸𝟐
- in cazul particular cand directiile coincid rezulta relatia :
𝒄𝒐𝒔𝟐𝜶 + 𝒄𝒐𝒔𝟐𝜷 + 𝒄𝒐𝒔𝟐𝜸 = 𝟏
Definitie pprrooiieeccttiiaa uunnuuii vveeccttoorr ppee oo ddrreeaappttaa (( dd )) :
- fie vectorul �� (𝒙, 𝒚, 𝒛) care formeaza unghiurile de masuri 𝜶 , 𝜷 , 𝜸 cu directia (𝒅) ;
- daca �� este versorul dreptei 𝒅 avem : �� = 𝒊 𝐜𝐨𝐬𝜶 + 𝒋 𝐜𝐨𝐬𝜷 + �� 𝐜𝐨𝐬𝜸 ;
- numim proiectia vectorului �� pe dreapta 𝒅 produsul :
�� ∙ �� = |�� | ∙ 𝟏 ∙ 𝐜𝐨𝐬(�� , �� ) = 𝒑𝒓𝒅�� adica :
𝒑𝒓𝒅�� = 𝒙 𝐜𝐨𝐬𝜶 + 𝒚𝐜𝐨𝐬𝜷 + 𝒛 𝐜𝐨𝐬 𝜸
Clasa a X + XI -a GEOMETRIE - 24
VECTORI
VECTORI
Definitie ttrraannssllaattiiaa :
- translatia este o transformare geometrica prin cate toate punctele unei figuri se deplaseaza
dupa acelasi vector .
Definitie ttrraannssllaattiiee ddee vveeccttoorr :
- fie un vector nenul �� (𝒂, 𝒃) si un plan 𝓟 ; - se numeste translatie de vector �� o functie 𝑻 ∶ 𝓟 → 𝓟 prin care fiecarui punct 𝑴 ∈ 𝓟 i se
asociaza un punct 𝑴′ ∈ 𝓟 astfel incat 𝑴𝑴′ = �� .
x
y
O
vv
M
M'
Proprietati aallee ttrraannssllaattiieeii ddee vveeccttoorr :
Proprietatea 1 : 𝑻(𝑴) = 𝑴′ , unde 𝑴′ este imaginea sau translatul punctului 𝑴 in
planul 𝓟 .
Proprietatea 2 : Translatia pastreaza lungimea , directia , sensul , segmentelor orientate ,
masura unghiurilor si aria suprafetelor .
Proprietatea 3 : Translatia conserva distantele dintre punctele planului ( este o izometrie ) si
transforma o dreapta data in una paralela cu aceasta , distincta de ea sau nu .
- in planul 𝓟 , se numeste izometrie o aplicatie 𝑰: 𝓟 → 𝓟 , care are proprietatea :
𝒅(𝑰(𝑨), 𝑰(𝑩)) = 𝒅(𝑨,𝑩) , ∀ 𝑨, 𝑩 ∈ 𝓟
Proprietatea 4 : Translatia conserva coliniaritatea punctelor planului si unghiurile .
Proprietatea 5 : Translatia transforma un poligon intr-un alt poligon egal cu primul si un
cerc dat intr-un cerc egal cu cel dat .
Proprietatea 6 : Daca 𝑴′(𝒙′, 𝒚′) este imaginea lui 𝑴(𝒙, 𝒚) prin translatia 𝑻 , atunci
avem :
𝒙′ = 𝒙 + 𝒂 , 𝒚′ = 𝒚 + 𝒃
Clasa a X + XI -a GEOMETRIE - 25
VECTORI
VECTORI
Definitie oommootteettiiaa :
- Omotetia este o transformare geometrica prin care se mareste / micsoreaza dimensiunile unei
figuri geometrice de acelasi numar de ori .
Definitie oommootteettiiee ddee cceennttrruu OO ssii rraappoorrtt kk :
- fie O un punct din plan si 𝒌 un numar real nenul ;
- se numeste omotetie de centru 𝑶 si raport 𝒌 o functie 𝑯 ∶ 𝓟 → 𝓟 care asociaza
fiecarui punct 𝑴 punctul 𝑴′ astfel incat :
𝑶𝑴′ = 𝒌 ∙ 𝑶𝑴
Proprietati aallee oommootteettiieeii :
Proprietatea 1 : 𝑯(𝑴) = 𝑴′ , unde 𝑴′ este imaginea lui 𝑴 prin functia 𝑯 .
Proprietatea 2 : O omotetie este definita daca se dau punctul 𝑶 impreuna cu un punct 𝑴 si cu imaginea sa 𝑴′ .
Proprietatea 3 : Omotetia pastreaza directia si masura unghiurilor .
Proprietatea 4 : Prin omotetie lungimile cresc sau descresc de acelasi numar de ori .
Proprietatea 5 : Omotetia nu pastreaza distantele dintre puncte . Ea le amplifica cu raportul
omotetiei in modul , |𝒌| .
Proprietatea 6 : Omotetia invariaza dreptele ce trec prin pol .
Proprietatea 7 : Omotetia transforma o dreapta data intr-o dreapta paralela cu cea data , un
poligon dat intr-un poligon asemenea cu cel dat si cercurile in cercuri .
Proprietatea 8 : Daca 𝑴′(𝒙′, 𝒚′) este imaginea lui 𝑴(𝒙, 𝒚) prin omotetia 𝑯𝑶𝒌 , atunci
avem :
𝒙′ = 𝒌 ∙ 𝒙 , 𝒚′ = 𝒌 ∙ 𝒚
- ecuatiile omotetiei in spatiu sunt :
𝒙′ = 𝒌 ∙ 𝒙 , 𝒚′ = 𝒌 ∙ 𝒚 , 𝒛′ = 𝒌 ∙ 𝒛
Top Related