Universitatea Transilvania din Brașovold.unitbv.ro/Portals/31/Sustineri de...
57
Investeşte în oameni! FONDUL SOCIAL EUROPEAN Programul Operaţional Sectorial Dezvoltarea Resurselor Umane 2007 – 2013 Axa prioritară 1 „Educaţie şi formare profesională în sprijinul creşterii economice şi dezvoltării societăţii bazate pe cunoaştere” Domeniul major de intervenţie 1.5 „Programe doctorale şi post-doctorale în sprijinul cercetării” Titlul proiectului: „Investiţie în dezvoltare durabilă prin burse doctorale (INED)” Numărul de identificare al contractului: POSDRU/88/1.5/S/59321 Beneficiar: Universitatea Transilvania din Braşov Universitatea Transilvania din Brașov Școala Doctorală Interdisciplinară Centrul de Cercetare: Sisteme de Energii Regenerabile și Reciclare Ing. Nora-Cristina CREANGĂ MODELAREA ȘI OPTIMIZAREA PRIN METODA SISTEMELOR MULTICORP A MECANISMELOR CU BARE ARTICULATE ȘI ROȚI DINȚATE UTILIZABILE ÎN ORIENTAREA SISTEMELOR FOTOVOLTAICE MODELLING AND OPTIMIZATION OF PV SYSTEMS’ GEARED LINKAGES THROUGH MULTIBODY SYSTEMS METHOD Conducător ştiinţific Prof.dr.ing. Ion VIȘA BRAȘOV, 2012
Transcript of Universitatea Transilvania din Brașovold.unitbv.ro/Portals/31/Sustineri de...
Investeşte în oameni!
FONDUL SOCIAL EUROPEAN Programul Operaţional Sectorial Dezvoltarea Resurselor Umane 2007 – 2013 Axa prioritară 1 „Educaţie şi formare profesională în sprijinul creşterii economice şi dezvoltării societăţii bazate pe cunoaştere” Domeniul major de intervenţie 1.5 „Programe doctorale şi post-doctorale în sprijinul cercetării” Titlul proiectului: „Investiţie în dezvoltare durabilă prin burse doctorale (INED)” Numărul de identificare al contractului: POSDRU/88/1.5/S/59321 Beneficiar: Universitatea Transilvania din Braşov
Universitatea Transilvania din Brașov
Școala Doctorală Interdisciplinară
Centrul de Cercetare: Sisteme de Energii Regenerabile și Reciclare
Ing. Nora-Cristina CREANGĂ
MODELAREA ȘI OPTIMIZAREA PRIN METODA SISTEMELOR
MULTICORP A MECANISMELOR CU BARE ARTICULATE ȘI ROȚI
DINȚATE UTILIZABILE ÎN ORIENTAREA SISTEMELOR
FOTOVOLTAICE
MODELLING AND OPTIMIZATION OF PV SYSTEMS’ GEARED
LINKAGES THROUGH MULTIBODY SYSTEMS METHOD
Conducător ştiinţific
Prof.dr.ing. Ion VIȘA
BRAȘOV, 2012
2
MINISTERUL EDUCAŢIEI, CERCETARII, TINERETULUI ŞI SPORTULUI
UNIVERSITATEA “TRANSILVANIA” DIN BRAŞOV BRAŞOV, B-DUL EROILOR NR. 29, 500036, TEL. 0040-268-413000, FAX 0040-268-410525
RECTORAT
D-lui (D-nei) ..............................................................................................................
COMPONENŢA Comisiei de doctorat
Numită prin ordinul Rectorului Universităţii „Transilvania” din Braşov Nr. 5327 din 26.07.2012
PREŞEDINTE: Prof.dr.ing. Codruța JALIU
Universitatea Transilvania din Brașov
CONDUCĂTOR ŞTIINŢIFIC: Prof.dr.ing. Ion VIȘA
Universitatea Transilvania din Brașov
REFERENŢI: Prof.dr.ing. Vistrian MĂTIEȘ
Universitatea Tehnică din Cluj-Napoca
Prof.dr.ing. Nicolae OLARIU
Universitatea Valahia din Târgovişte
Prof.dr.ing. Mircea NEAGOE
Universitatea Transilvania din Brașov
Data, ora şi locul susţinerii publice a tezei de doctorat: 14/12/2012, ora 10:00, Colina Uiversității, Corpul E, Căsuța Solară.
Eventualele aprecieri sau observaţii asupra conţinutului lucrării vă rugăm să le transmiteţi în timp util, pe adresa de e-mail [email protected]
Totodată vă invităm să luaţi parte la şedinţa publică de susţinere a tezei de doctorat.
Vă mulţumim.

3
CUPRINS Pg.
teza Pg.
rezumat
1. Introducere 4 5 2. Stadiul actual al cercetărilor în domeniu 6 6 2.1 Sisteme fotovoltaice 6 6 2.2 Mecanisme cu bare articulate și roți dințate 16 10
2.3 Concluzii privind stadiul actual și formularea obiectivelor tezei 20 11
3. Conceperea structurală a mecanismelor plane cu bare articulate și roți dințate considerate sisteme multicorp
22
13
3.1 Descrierea succintă a metodei sistemelor multicorp 22 13 3.2 Analiza mecanismelor cu bare articulate și roți dințate ca sisteme multicorp
cu număr minim de corpuri
25
14 3.3 Conceperea de mecanisme cu bare articulate și cu roți dințate ca sisteme mecanice multicorp
29
16
3.4 Concluzii și contribuții 48 22 4. Modelarea cinematică a mecanismelor plane cu bare articulate și roți dințate ca sisteme multicorp
50
23
4.1 Obiectivele și etapele modelării cinematice 50 23 4.2 Sinteza geometrică a mecanismelor. Analiza eficienței orientării 63 27
4.2.1 Mecanism triunghiular 64 27 4.2.2 Mecanism 3RT 75 - 4.2.3 Mecanism patrulater 87 - 4.3 Concluzii și contribuții 97 37
5. Proiectarea și implementarea unui demonstrator PV de tip azimutal cu mecanism triunghiular cu bare articulate și roți dințate
98
38
5.1 Stabilirea variantei optime de mecanism de orientare 98 38 5.2 Sinteza dimensională a mecanismului de tip triunghi cu bare articulate și roți dințate
100
38
5.3 Proiectul constructiv al demonstratorului 102 40 5.4 Implementarea demonstratorului 107 41 5.5 Monitorizarea parametrilor meteo și ai demonstratorului 111 42 5.6 Concluzii și contribuții 112 43 6. Testarea experimentală a demonstratorului PV de tip azimutal cu mecanism cu bare articulate și roți dințate
114
44
Concluzii și contribuții 125 47 7. Concluzii finale, contribuții originale, valorificarea rezultatelor și direcții ulterioare de cercetare
125
49
7.2 Concluzii finale și contribuții originale 125 49 7.2 Valorificarea rezultatelor 128 51 7.3 Direcții ulterioare de cercetare 128 51 Bibliografie 130 52 ANEXE
Mecanisme cu bare articulate și roți dințate 138 - Scurt rezumat (română/engleză) 153 55 CV (română) 154 56 CV (engleză) 155 57
Notă:În rezumat sunt utilizate numerele de ordine ale capitolelor, subcapitolelor, figurilor și ecuațiilor din teză
4
CONTENTS
Page number in
Thesis Summary
1. Introduction 4 5 2. State of art in the area of the thesis topic 6 6 2.1 Photovoltaic systems 6 6 2.2 Geared linkages 16 10
2.3 Conclusions regarding the state of art and thesis objectives 20 11
3. Structural design of the plane geared linkages as multibody systems 22 13
3.1 Short description of the multibody systems’ method 22 13 3.2 The analysis of several geared linkages as multibody systems with
minimal number of bodies
25
14 3.3 Structural synthesis of geared linkages as mechanical multibody systems 29 16 3.4 Conclusions and contributions 48 22 4. Kinematic modelling of the plane geared linkages as multibody systems 50 23
4.1 The kinematic modelling objectives and stages 50 23 4.2 Geometrical synthesis of the mechanisms. Orientation efficiency analysis 63 27
4.2.1 Triangular mechanism 64 27 4.2.2 3RT mechanism 75 - 4.2.3 Four bar mechanism 87 - 4.3 Conclusions and contributions 97 37
5. Designing and implementing of a azimuthal PV demonstrator with an incorporated triangular geared linkage
98
38
5.1 Establishing the optimal tracking mechanism 98 38 5.2 Dimensional synthesis of the triangular geared linkage 100 38 5.3 Detailed design of the demonstrator 102 40 5.4 Implementing the demonstrator 107 41 5.5 Monitoring the meteorological parameters and the demonstrator’s parameters
111
42
5.6 Conclusions and contributions 112 43 6. Experimental testing of the azimuthal PV demonstrator with an incorporated triangular geared linkage
114
44
Conclusions and contributions 125 47 7. Final conclusions, contributions, results dissemination and future openings
126
49
7.1 Final conclusions and contributions 124 49 7.2 Results dissemination 126 51 7.3 Future openings 126 51 References 130 52 APPENDIX
Geared linkages 138 - Abstract (romanian/english) 151 55 CV (Romanian) 153 56 CV (English) 154 57
Note: In summary are used the same serial numbers for the chapters, subsections, figures and equations as in PhD thesis

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
1. Introducere
În marea lor majoritate, problemele ecologice sunt pricinuite de utilizarea combustibililor
fosili care sunt responsabili de emisiile de CO2 din atmosferă, nocive unui climat ecologic, şi care, de asemenea, sunt neregenerabile. Dacă se dorește diminuarea efectelor provocate de creșterea gradului de poluare, o dezvoltare a surselor regenerabile de energie ca surse de energie alternative este imperios necesară [49] Primele preocupări acordate importanței protejării mediului înconjurător de către națiunile Terrei au apărut începând cu anii ‘80 prin organizarea Conferinței de la Geneva în 1985, continuând cu Raportul Brutland în 1986, “Summitul Pământului” de la Rio de Janeiro în 1992 și ajungând la protocolul de la Kyōtō și la Summitul Mondial de la Johannesburg din 2002.
Semnarea în decembrie 1997 a protocolului de la Kyōtō a avut ca scop reducerea gazelor de seră cu 5,2% până în anul 2012 față de nivelul acestora din 1990 [98]. În cadrul protocolului au fost stabilite ținte diverse privind reducerea emisiilor de gaze cu efect de seră pentru cele 160 de țări semnatare. În 2012, unele țări semnatare, precum Franța, Germania, Rusia și Anglia, și-au depășit obiectivul impus de protocol, alte țări semnatare precum Japonia și Italia se află la aproximativ 2% de atingerea țintei, iar alte țări (Australia, Canada) sunt foarte departe de atingerea obiectivului impus. Țările aflate în imposibilitatea de atingere a țintelor impuse prin protocolul de la Kyōtō au decis să se retragă pentru a evita penalitățile cărora ar fi trebuit să le facă față. [98]. În decembrie 2008, Uniunea Europeană a adoptat Directiva 20/20/20, directivă ce a devenit Lege în iunie 2009, conform căreia țările membre trebuie să contribuie până în anul 2020 la reducerea cu 20% a emisiilor gazelor cu efect de seră, la reducerea cu 20% a consumului de energie prin îmbunătățirea eficienței energetice și la creșterea cu 20% a consumului de energie provenit din surse regenerabile [94].
Tematica prezentei teze de doctorat o constituie modelarea mecanismelor cu bare articulate și roți dințate în scopul utilizării acestora în orientarea sistemelor fotovoltaice pentru creșterea cantității de energie solară ce ajunge la suprafața fotovoltaică și implicit creșterea cantității de energie electrică astfel obținută. Astfel, la nivel european, lucrarea se încadrează în programul Cooperation FP7 (Seventh Framework Programme), subprogramul Joint Tehnology Initiatives, prioritatea Energy, aria tematică fiind generarea de electricitate din surse regenerabile de energie (Renewable electricity generation) [93]. La nivel național, domeniul abordat este cuprins în cadrul Planului Național de Cercetare și Dezvoltare PNII, prioritatea 2.Energie, 2.1. Sisteme şi tehnologii energetice durabile; securitatea energetică [35]. Prin tematica abordată, lucrarea Modelarea și optimizarea prin metoda sistemelor multicorpa mecanismelor cu bare articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice se încadrează în direcțiile de cercetare șiințifică ale Centrului de Cercetare “Sisteme de Energii Regenerabile și Reciclare” din cadrul Universității Transilvania din Brașov. Obiectivul principal al tezei de doctorat îl reprezintă modelarea și optimizarea mecanismelor cu bare articulate și roți dințate aplicabile în orientarea platformelor fotovoltaice pentru creșterea eficienței energetice.
Doresc să mulţumesc conducătorului de doctorat pentru îndrumarea și sprijinul acordat
pe perioada de doctorat, precum și membrilor Centrului de Cercetare Științifică “Sisteme de Energii Regenerabile și Reciclare”. De asemenea, mulțumesc familiei pentru sprijinul şi încrederea acordată pe parcursul perioadei doctoratului.
Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
2. Stadiul actual al cercetărilor în domeniu
Prezentul capitol cuprinde o analiză critică a stadiului actual al sistemelor destinate
orientării azimutale a platformelor fotovoltaice, a mecanismelor cu bare articulate și roți dințate utilizate în tehnică și a metodelor de analiză a acestora. În urma identificării problemelor nesoluționate până în prezent, se stabilesc obiectivele tezei de doctorat. 2.1. Sisteme fotovoltaice
În contextul utilizării surselor neregenerabile de energie, energia solară reprezintă cea
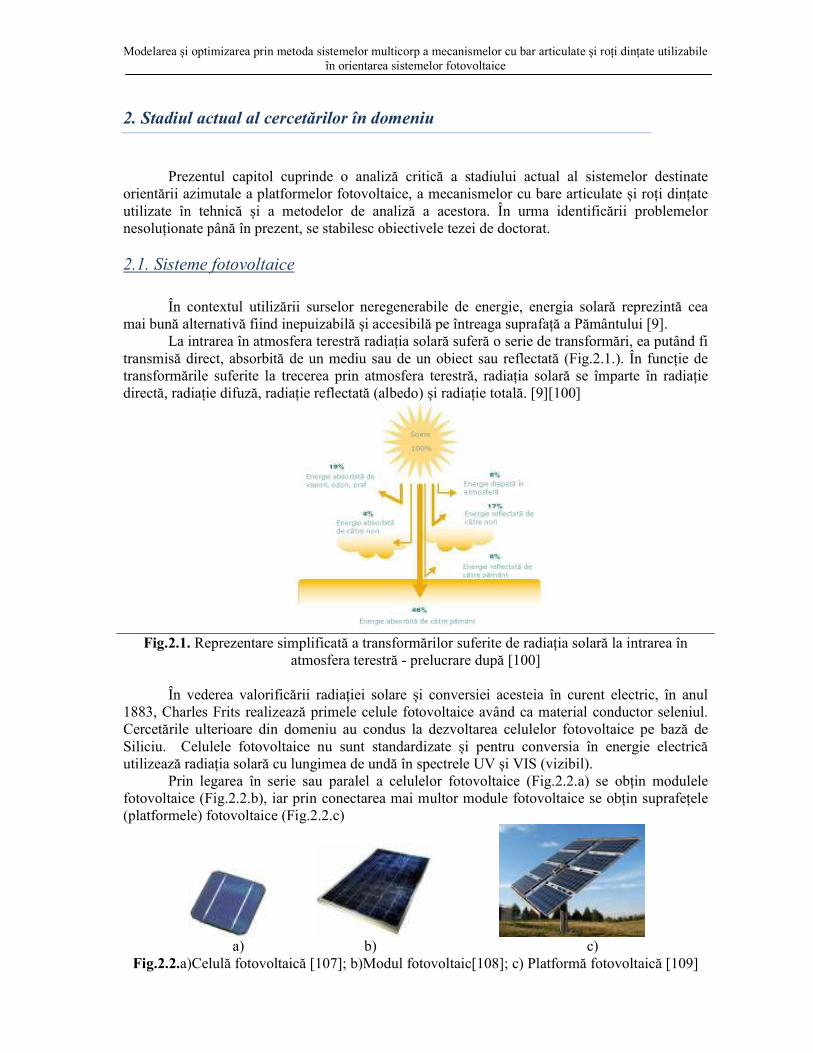
mai bună alternativă fiind inepuizabilă și accesibilă pe întreaga suprafață a Pământului [9]. La intrarea în atmosfera terestră radiația solară suferă o serie de transformări, ea putând fi
transmisă direct, absorbită de un mediu sau de un obiect sau reflectată (Fig.2.1.). În funcție de transformările suferite la trecerea prin atmosfera terestră, radiația solară se împarte în radiație directă, radiație difuză, radiație reflectată (albedo) și radiație totală. [9][100]
Fig.2.1. Reprezentare simplificată a transformărilor suferite de radiația solară la intrarea în
atmosfera terestră - prelucrare după [100] În vederea valorificării radiației solare și conversiei acesteia în curent electric, în anul 1883, Charles Frits realizează primele celule fotovoltaice având ca material conductor seleniul. Cercetările ulterioare din domeniu au condus la dezvoltarea celulelor fotovoltaice pe bază de Siliciu. Celulele fotovoltaice nu sunt standardizate și pentru conversia în energie electrică utilizează radiația solară cu lungimea de undă în spectrele UV și VIS (vizibil). Prin legarea în serie sau paralel a celulelor fotovoltaice (Fig.2.2.a) se obțin modulele fotovoltaice (Fig.2.2.b), iar prin conectarea mai multor module fotovoltaice se obțin suprafețele (platformele) fotovoltaice (Fig.2.2.c)
a) b) c)
Fig.2.2.a)Celulă fotovoltaică [107]; b)Modul fotovoltaic[108]; c) Platformă fotovoltaică [109]

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate ut
Pentru creșterea eficienței de conversie a energiei solare în energie electrică
lentile sau suprafețe reflective pentru crereceptoare a suprafeței fotovoltaice Trackerele solare sunt sisteme mecatronice proiectate în scopul minimizării unghiului de incidență între raza solară și normala la suprafața receptoare, pentru maximizarea radiației solare receptate în condițiile minimizării energiei folosite la orientare.[46] [47] Sistemele de tracking pot fi clasificate în sisteme pasive sursa motoare. Sistemele active de orientare, se bazează pe utilizarea de surse motoare în vederea orientării după Soare a suprafețelor fotovoltaice. poate realiza după o singură axă (sisteme de orientade orientare bi-axiale) permițând captarea radiației solare de până la 94% în cazul sistemelor monoaxiale respectiv 99% pentru cele biaxiale Sistemele de tracking biecuatoriale și pseudo-azimutale, diferenînseriere a mișcărilor. La sistemele ecuatorial și azimutal, inițial se realizează reglarea mișcării diurne urmată de cea sezonieră[62],realizează inițial reglajul mișcării sezoniere urmată de cea diurnă[11]. Sistemul de orientare pseudo-azimutal este nou apărut pe piace realizează mișcarea diurnă este orizontală și tangentă la meridianul locului spre deosebire de sistemul azimutal la care această axă este verticală.
Soluțiile constructive ale melcat atât pentru mișcarea azimutală cât și pentru elevație (Fig.2.7.a), utilizarea unui angrenaj melcat pentru mișcarea azimutală și a unui actuator liniar pentru mișcarea de elevație (Fig.2.7.b), utilizarea de actuatoare liniare atât pentru mi(Fig.2.7.c).
De asemenea există brevete fotovoltaice. O astfel de soluție este cea brevetată de americanul Gregory M. O’Rourke (Fig.2.12.) care a propus atât pentru realizarea sezoniere un sistem pe șine [85]. O altă soluție patentată este cea prezentată în Fig.2.13, soluție propusă de Herb Vending conform căreia, mirealizate prin intermediul unor angrenaje melcate.[87]
Se prezintă în continuare câteva exemple de trackere utilizate pentru orientarea azimutală
a platformelor fotovoltaice ale firmelor specializate în domeniu. Un prim exemplu de tracker azimutal destinat orientării platformelor fotovoltaice este produs de compania spaniol FEINA SCP. Acest tracker a fost proiectat pentru a sussuprafețe fotovoltaice de 20, 28, sau 45 m
a) Fig.2.7. Sisteme de orientare de tip azimutal: a) angrenaj melcat
actuator liniar – angrenaj[118]; c) actuator liniar
și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utîn orientarea sistemelor fotovoltaice
ței de conversie a energiei solare în energie electrică reflective pentru creșterea cantității de radiație incidentă la suprafața
ței fotovoltaice [44], sau se utilizeză trackere solare [34]. Trackerele solare sunt sisteme mecatronice proiectate în scopul minimizării unghiului de
și normala la suprafața receptoare, pentru maximizarea radiației solare țiile minimizării energiei folosite la orientare.[46] [47]
Sistemele de tracking pot fi clasificate în sisteme pasive și sisteme active în funcție
Sistemele active de orientare, se bazează pe utilizarea de surse motoare în vederea țelor fotovoltaice. Orientarea activă a sistemelor fotovoltaice se
poate realiza după o singură axă (sisteme de orientare mono-axiale) sau după două axe (sisteme țând captarea radiației solare de până la 94% în cazul sistemelor
v 99% pentru cele biaxiale. [57][62] Sistemele de tracking bi-axiale se împart în sisteme ecuatoriale, azimutale, pseudo
azimutale, diferențierea între ele realizându-se în funcție de ordinea de șcărilor. La sistemele ecuatorial și azimutal, inițial se realizează reglarea mișcării
diurne urmată de cea sezonieră[62], spre deosebire de sistemul pseudo-ecuatorial la care se țial reglajul mișcării sezoniere urmată de cea diurnă[11]. Sistemul de orientare
azimutal este nou apărut pe piață și se deosebește de sistemul azimutal prin faptul că axa șcarea diurnă este orizontală și tangentă la meridianul locului spre deosebire de
această axă este verticală. țiile constructive ale trackerelor azimutale sunt foarte variate: utilizarea de angrenaj
șcarea azimutală cât și pentru elevație (Fig.2.7.a), utilizarea unui angrenaj șcarea azimutală și a unui actuator liniar pentru mișcarea de elevație (Fig.2.7.b),
utilizarea de actuatoare liniare atât pentru mișcarea azimutală cât și pentru cea sezonieră
De asemenea există brevete cu soluții pentru realizarea cursei azimutale ție este cea brevetată de americanul Gregory M. O’Rourke
(Fig.2.12.) care a propus atât pentru realizarea mișcării azimutale cât și pentru realizarea mișcării șine [85]. O altă soluție patentată este cea prezentată în Fig.2.13, soluție
propusă de Herb Vending conform căreia, mișcarea azimutală și mișcarea de elevație sunt intermediul unor angrenaje melcate.[87]
Se prezintă în continuare câteva exemple de trackere utilizate pentru orientarea azimutală fotovoltaice ale firmelor specializate în domeniu.
Un prim exemplu de tracker azimutal destinat orientării platformelor fotovoltaice este ompania spaniol FEINA SCP. Acest tracker a fost proiectat pentru a sus
de 20, 28, sau 45 m2 (Fig.2.8.) la viteze ale vântului de până la
b)
Sisteme de orientare de tip azimutal: a) angrenaj melcat – angrenaj melcat[117]; b) angrenaj[118]; c) actuator liniar – actuator liniar[62]
și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile
ței de conversie a energiei solare în energie electrică se utilizează șterea cantității de radiație incidentă la suprafața
Trackerele solare sunt sisteme mecatronice proiectate în scopul minimizării unghiului de și normala la suprafața receptoare, pentru maximizarea radiației solare
și sisteme active în funcție de
Sistemele active de orientare, se bazează pe utilizarea de surse motoare în vederea Orientarea activă a sistemelor fotovoltaice se
axiale) sau după două axe (sisteme țând captarea radiației solare de până la 94% în cazul sistemelor
iale, azimutale, pseudo-ție de ordinea de
șcărilor. La sistemele ecuatorial și azimutal, inițial se realizează reglarea mișcării ecuatorial la care se
țial reglajul mișcării sezoniere urmată de cea diurnă[11]. Sistemul de orientare ță și se deosebește de sistemul azimutal prin faptul că axa
șcarea diurnă este orizontală și tangentă la meridianul locului spre deosebire de
sunt foarte variate: utilizarea de angrenaj șcarea azimutală cât și pentru elevație (Fig.2.7.a), utilizarea unui angrenaj
șcarea azimutală și a unui actuator liniar pentru mișcarea de elevație (Fig.2.7.b), ntru cea sezonieră
pentru realizarea cursei azimutale a platformelor ție este cea brevetată de americanul Gregory M. O’Rourke
șcării azimutale cât și pentru realizarea mișcării șine [85]. O altă soluție patentată este cea prezentată în Fig.2.13, soluție
șcarea azimutală și mișcarea de elevație sunt
Se prezintă în continuare câteva exemple de trackere utilizate pentru orientarea azimutală
Un prim exemplu de tracker azimutal destinat orientării platformelor fotovoltaice este ompania spaniol FEINA SCP. Acest tracker a fost proiectat pentru a susține o
) la viteze ale vântului de până la
c)
angrenaj melcat[117]; b) [62]

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
40km/h.Modelele FEINA SF 20, 28, 45 propuse de firma spaniolă, sunt trackere bi-axiale la care atât mișcarea azimutală cât și mișcarea sezonieră se realizează cu ajutorul angrenajelor melcate. Unghiul realizat prin mișcarea sezonieră ia valori la acest tip de trackere între 5-90°, iar cursa azimutală atinge o valoare de ±105° [101]. Problemele create de aceste tipuri de trackere sunt legate de jocul dinților în angrenare, dar și de faptul că, deși realizate din oțel cu rezistență înaltă, sectoarele dințate sunt direct supuse factorilor de mediu fără posibilitatea unei mentenanțe corespunzătoare.
O altă companie producătoare de trackere pentru orientare azimutală este firma spaniolă ADES. Trackerele propuse de această firmă (Fig.2.9.) sunt utilizate pentru orientarea platformelor fotovoltaice. Realizarea mișcării sezoniere este realizată cu ajutorul a două actuatoare liniare ce funcționează în tandem, iar mișcarea azimutală este realizată prin intermediul unui sistem hidraulic, sistem care este și brevetat de ADES[84][92]. Dezavantajul acestui sistem de orientare îl reprezintă prețul de cost al sistemului hidraulic folosit. Firma americană Wattsun este de asemenea cunoscută pentru sistemele sale de orientare azimutală. Realizarea mișcării sezoniere la aceste trackere se face cu ajutorul unui actuator liniar pe un domeniu cuprins între 5-75°, iar mișcarea diurnă este realizată pe un domeniu unghiular curpins între ±135° cu ajutorul unui moto-reductor (Fig.2.10.) [103].
b)
Extras din Fig.2.8. b) Sistem de orientare azimutală FEINA SF45[101]
a)
Extras din Fig.2.9. Sistem de orientare azimutală ADES [92].
Fig.2.10. Sistem de orientare azimutală Wattsun AZ
225[103]
Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
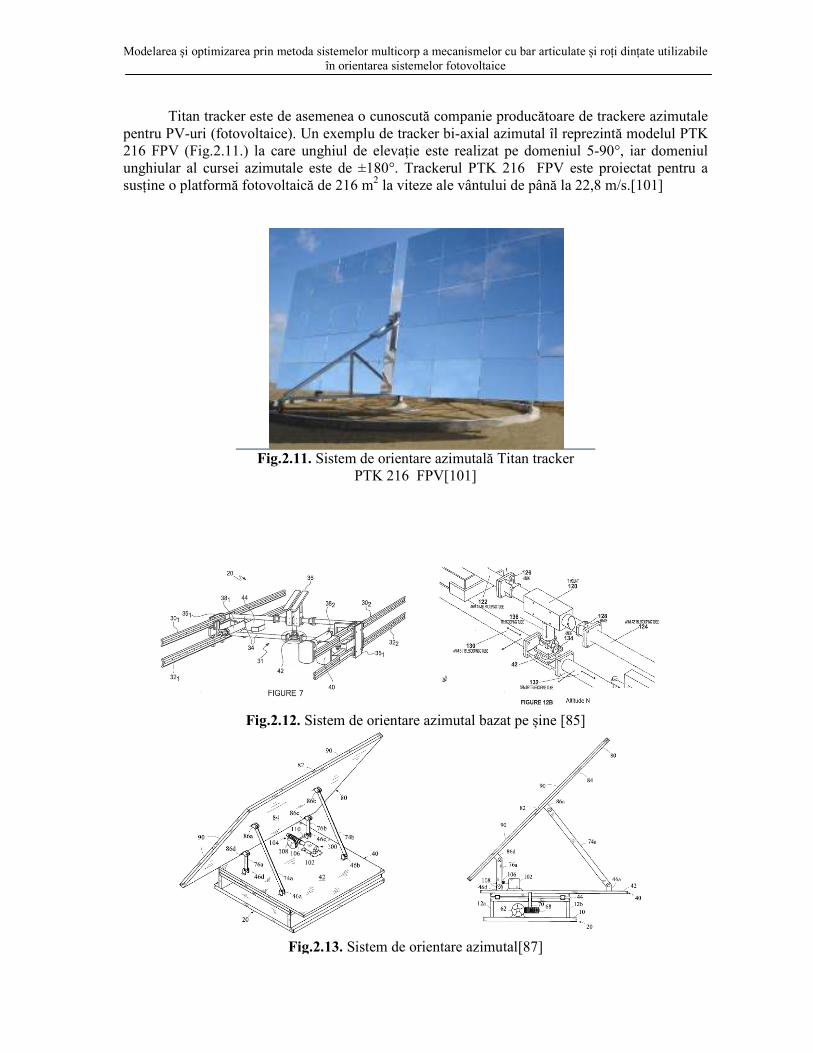
Titan tracker este de asemenea o cunoscută companie producătoare de trackere azimutale pentru PV-uri (fotovoltaice). Un exemplu de tracker bi-axial azimutal îl reprezintă modelul PTK 216 FPV (Fig.2.11.) la care unghiul de elevație este realizat pe domeniul 5-90°, iar domeniul unghiular al cursei azimutale este de ±180°. Trackerul PTK 216 FPV este proiectat pentru a susține o platformă fotovoltaică de 216 m2 la viteze ale vântului de până la 22,8 m/s.[101]
Fig.2.11. Sistem de orientare azimutală Titan tracker
PTK 216 FPV[101]
Fig.2.12. Sistem de orientare azimutal bazat pe șine [85]
Fig.2.13. Sistem de orientare azimutal[87]

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
10
Din analiza sistemelor fotovoltaice prezentate și a celor analizate în numeroase alte
lucrări au rezultat o serie de dezavantaje, printre care: -unghiuri de presiune mari, care pot duce la blocarea sistemului în funcționare (la cele cu un contur articulat); -cost de producție ridicat și jocuri în funcționare (la cele cu angrenaj melcat); - complexitate ridicată a construcției. Eliminarea acestor dezavantaje se poate face prin utilizarea de noi mecanisme de orientare. O soluție, propusă în actuala lucrare, este utilizarea de sisteme de orientare formate din mecanisme articulate și roți dințate. 2.2. Mecanisme cu bare articulate și roți dințate Astfel de mecanisme sunt în prezent utilizate în tehnică pentru diverse funcționlități. Ca exemplificare: în Fig.2.15.a. [83] se prezintă mecanismul unei biciclete staționare pentru exerciții fizice; în Fig.2.15.b [86] se prezintă un mecanism al unui manipulator; în Fig.2.15.c [111] se prezintă mecanismul de acționare a unui geam de automobil.
Prin prezenta lucrare se dezvoltă studiul acestor tipuri de mecanisme prin metoda sistemelor multicorp care permite modelarea unitară a întregului mecanism în vederea prototipării virtuale folosind softuri comerciale.
Metoda propusă permite și sinteza (conceperea) acestor mecanisme ca sisteme multicorp , putând astfel înlocui metodele existente în literatură bazate, de regulă, pe numărul de roți dințate și grafurile atructurale asociate (fig. 2.17.a [42]) sau pe tipul mecanismelor articulate (fig.2.16.-[43] și fig 2.18.-[50])
a) b)
c)
d)
Fig.2.15. a) Mecanismul unei biciclete staționare [83]; b) mecanism al unui manipulator [86]; c) mecanismul de acționare a unui geam de automobil [111], d) prehensor. [112]

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
11
Fig.2.16.Mecanisme de tip pentalater cu bare articulate și roți dințate[50]
a)
b)
c)
Fig.2.17. Mecanism patrulater cu a) 2 roți dințate, b) 3 roți dințate, c) 4 roți dințate și grafurile asociate[42]
c)
Extras din Fig.2.18. c) Mecanisme cu bare articulate și angrenaj interior [43]
2.3. Concluzii privind stadiul actual și formularea obiectivelor tezei
În urma analizei produselor existente pe piața trackerelor cu orientare azimutală a
sistemelor fotovoltaice, se pot desprinde următoarele concluzii:

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
12
1. Se întâlnesc în literatura de specialitate o multitudine de soluții cinematice și constructive
de mecanisme de orientare; 2. Pentru creșterea cantității de radiație solară ce ajunge la suprafața fotovoltaică și implicit
a creșterii eficienței de conversie a energiei solare în energie electrică, se utilizează sisteme mono și bi-axiale de tracking;
3. De regulă, mișcarea sezonieră a sistemelor fotovoltaice este realizată cu ajutorul actuatoarelor liniare și mai rar cu ajutorul angrenajelor melcate. Axa ce generează mișcarea de elevație trebuie să permită realizarea unui domeniu unghiular sub 90°;
4. Axa ce generează mișcarea diurnă trebuie să permită realizarea unui domeniu unghiular de peste 180°, această cursă unghiulară fiind atinsă în general prin utilizarea transmisiilor cu roți dințate (moto-reductoare cilindrice sau melcate) sau prin lanț. Dezavantajul acestor sisteme de tracking îl constituie prețul de cost datorat complexității, dar și mentenanța dificilă a acestora (compensarea uzurilor la nivelul dinților);
5. O alternativă la folosirea moto-reductoarelor pentru realizarea cursei azimutale o constituie utilizarea actuatoarelor liniare care au însă ca și consecință reducerea cursei unghiulare ce poate fi obținută. Pentru realizarea totuși a unor curse unghiulare satisfăcătoare, actuatorii liniari se înseriază cu diferite mecanisme amplificatoare cu bare articulate intervenind totuși dezavantajul că în pozițiile sale extreme, un mecanism cu bare articulate se poate bloca la o valoare a unghiului de presiune mai mare decât o valoare maximă admisă;
6. În literatură există diverse metode de studiu a mecanismelor cu bare articulate și roți dințate legate de funcționalitatea concretă a acestora;
7. Înlăturarea dezavantajelor semnalate și creșterea eficienței sistemelor fotovoltaice impune utilizarea de noi mecanisme de orientare.
Pe baza acestor concluzii se pot astfel defini obiectivul general şi obiectivele operaţionale
ale tezei de doctorat. Obiectivul principal al tezei de doctorat îl reprezintă modelarea și optimizarea
mecanismelor cu bare și roți dințate aplicabile în orientarea platformelor fotovoltaice pentru creșterea eficienței energetice.
Ca obiective operaţionale se definesc:
a. Conceperea mecanismelor cu bare și roți dințate ca sisteme mecanice multicorp; b. Modelarea cinematică a mecanismelor cu bare și roți dințate ca sisteme mecanice
multicorp; c. Optimizarea geometriei mecanismelor cu bare și roți dințate aplicabile în orientarea
platformelor fotovoltaice; d. Proiectarea, execuția, implementarea și testarea unui mecanism de orientare cu bare
articulate și roți dințate.

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
13
3. Conceperea structurală a mecanismelor plane cu bare articulate și roți dințate considerate sisteme multicorp
Studiul mecanismelor cu bare articulate și roți dințate se efectuează prin metoda
sistemelor multicorp care permite utilizarea softurilor comerciale în elaborarea prototipului virtual și optimizarea lui prin intermediul computerului.
În cadrul acestui capitol se prezintă un algoritm de modelare al mecanismelor cu bare articulate și roți dințate ca sisteme multicorp cu număr minim de corpuri și sunt prezentate patru tipuri de astfel de mecanisme analizate conform algoritmului propus.
De asemenea, conceperea mecanismelor cu bare articulate și roți dințate se abordează tot prin metoda sistemelor multicorp ca fiind singura metodă fezabilă pentru asemenea mecanisme, pe baza unor date inițiale concret definite, obținându-se o multitudine de variante de mecanisme.
3.1. Descrierea succintă a metodei sistemelor multicorp
Conform metodei sistemelor mulicorp, un sistem mecanic, în general, este format din
corpuri supuse la restricții geometrice (rg) și cinematice (rc). [78] În spațiul cu numărul de dimensiuni S (S=3 pentru plan, S=6 pentru spațiul general) un
corp considerat liber are un număr de grade de libertate L=S. Restricțiile geometrice dintre corpuri anulează grade de libertate relativă între corpuri. Evident 1 ≤ rg≤ S –1.
Mișcarea relativă între două corpuri este realizată prin intermediul restricțiilor geometrice (rg) care pot fi simple (de contact direct) sau compuse (de contact indirect, prin intermediul unui alt element care însă nu este considerat corp).
Mișcarea relativă impusă între două corpuri se realizează prin intermediul restricției cinematice (rc) care anulează gradele de libertate rămase în sistemul mecanic după impunerea restricțiilor de tip geometric. Restricția cinematică materializată prin elementul de mișcare adăugat sistemului mecanic poate fi motor rotativ sau motor de translație (piston hidraulic, pneumatic).
Definirea unui sistem mecanic ca sistem multicorp se face în baza unui algoritm după cum urmează:
a. Alcătuirea modelului structural al sistemului mecanic; b. Identificarea corpurilor componente sistemului mecanic în succesiunea:
- baza mecanismului (corpul fix); - corpul/corpurile de intrare; - corpul/corpurile de ieșire; - corpuri cu mai mult de două conexiuni; - corpuri cu forțe exterioare aplicate (forțe motoare, forțe rezistente); - alte corpuri dacă este necesar ( în special în cazul în care apar cuple suprapuse).
Numărul de corpuri pentru sistemul mecanic considerat variază între un număr maxim – caz în care avem doar restricții simple, iar numărul de corpuri este egal cu numărul de elemente al mecanismului - și un număr minim – caz în care apar și restricții compuse, iar numărul corpurilor este mai mic decât numărul de elemente al mecanismului. Metoda conduce la obținerea unui număr minim de corpuri pentru un sistem mecanic dat. În acest fel se evită modele cu număr foarte mare de corpuri în cazul sistemelor mecanice complexe și se creează poosibilitatea studiului dinamic în timp real a sistemului prin utilizarea de softuri comerciale.
c. Identificarea restricțiilor geometrice; d. Calculul mobilității mecanismului utilizându-se următoarea relație:
Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
14
M=S·�nc-1�-∑ rij, (3.1)
unde S reprezintă spațialitatea mecanismului; nc numărul total de corpuri, iar ∑ rij numărul total al restricțiilor geometrice dintre corpuri.
e. Identificarea restricțiilor cinematice.
3.2. Analiza mecanismlor cu bare articulate și roți dințate ca sisteme multicorp cu număr minim de corpuri
În cazul mecanismelor plane cu bare articulate și roți dințate modelate ca sisteme
multicorp cu număr minim de corpuri se utilizează algoritmul prezentat la subcapitolul anterior. Restricţiile geometrice ce apar în modelarea acestor tipuri de mecanisme sunt restricţii de tip rotaţie, translaţie, rotaţie – rotaţie, rotaţie – translaţie şi curbă – curbă. În teză se prezintă mecanisme cu bare articulate şi roţi dinţate pentru care se identifică elementele şi cuplele componente, se modelează ca sisteme multicorp cu număr minim de corpuri, se identifică restricţiile geometrice şi se calculează mobilitatea sistemului multicorp. Sunt analizate următoarele trei tipuri de mecanism:.
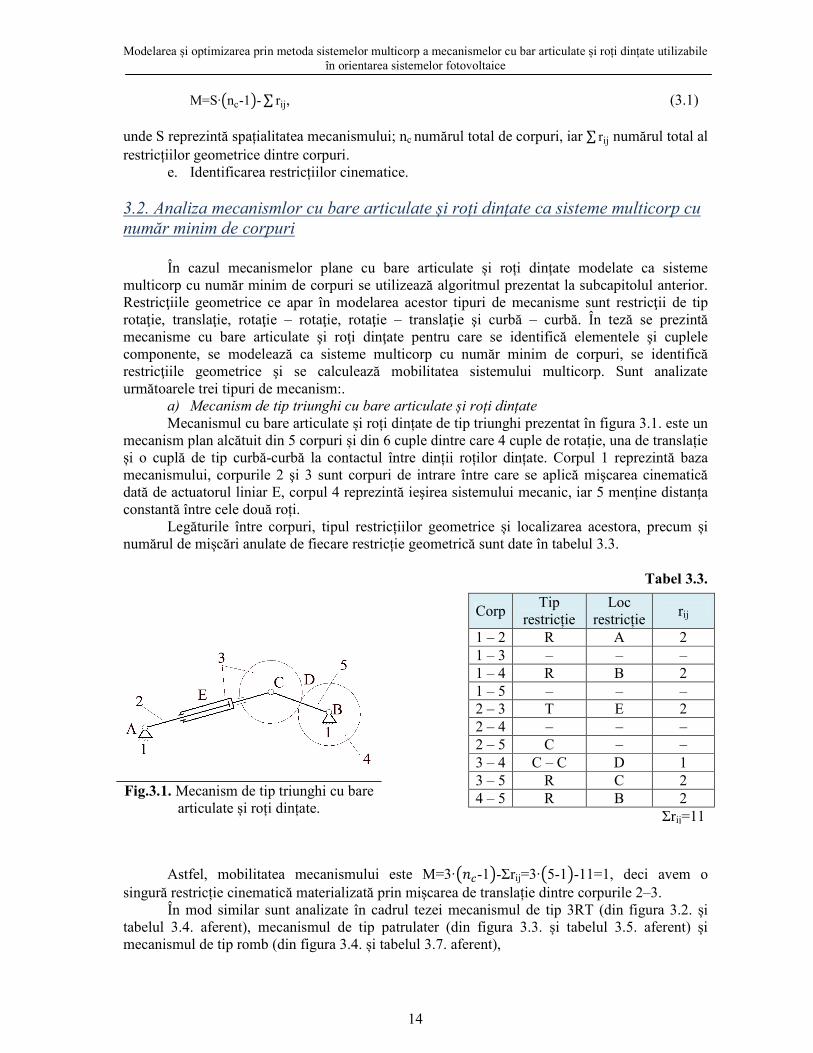
a) Mecanism de tip triunghi cu bare articulate și roți dințate Mecanismul cu bare articulate și roți dințate de tip triunghi prezentat în figura 3.1. este un
mecanism plan alcătuit din 5 corpuri și din 6 cuple dintre care 4 cuple de rotație, una de translație și o cuplă de tip curbă-curbă la contactul între dinții roților dințate. Corpul 1 reprezintă baza mecanismului, corpurile 2 şi 3 sunt corpuri de intrare între care se aplică mişcarea cinematică dată de actuatorul liniar E, corpul 4 reprezintă ieşirea sistemului mecanic, iar 5 menține distanța constantă între cele două roți.
Legăturile între corpuri, tipul restricțiilor geometrice și localizarea acestora, precum și numărul de mișcări anulate de fiecare restricție geometrică sunt date în tabelul 3.3.
Tabel 3.3.
Astfel, mobilitatea mecanismului este M=3·���-1�-Σrij=3·�5-1�-11=1, deci avem o
singură restricție cinematică materializată prin mișcarea de translație dintre corpurile 2–3. În mod similar sunt analizate în cadrul tezei mecanismul de tip 3RT (din figura 3.2. și tabelul 3.4. aferent), mecanismul de tip patrulater (din figura 3.3. și tabelul 3.5. aferent) și mecanismul de tip romb (din figura 3.4. și tabelul 3.7. aferent),
Corp Tip
restricție Loc
restricție rij
1 – 2 R A 2 1 – 3 – – – 1 – 4 R B 2 1 – 5 – – – 2 – 3 T E 2 2 – 4 – – – 2 – 5 C – – 3 – 4 C – C D 1 3 – 5 R C 2 4 – 5 R B 2
Σrij=11
Fig.3.1. Mecanism de tip triunghi cu bare articulate și roți dințate.

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
15
Tabel 3.4.
Fig.3.2. Mecanism 3RT cu bare articulate și roți dințate.
Tabel 3.5.
Tabel 3.6.
Corp Tip
restricție Loc
restricție rij
1 – 2 T A 2 1 – 3 R E 2 1 – 4 – – – 1 – 5 – – – 2 – 3 – – – 2 – 4 – – – 2 – 5 R B 2 3 – 4 R E 2 3 – 5 C – C D 1 4 – 5 R C 2
Σrij=11
Fig.3.3. Mecanism patrulater cu bare
articulate și roți dințate.
Corp Tip
restricție Loc
restricție rij
1 – 2 R A 2 1 – 3 R E 2 1 – 4 – – – 1 – 5 – – – 2 – 3 – – – 2 – 4 – – – 2 – 5 R B 2 3 – 4 R E 2 3 – 5 C – C D 1 4 – 5 R C 2
Σrij =11
Fig.3.4. Mecanism romboid cu bare articulate și roți dințate.
Corp Tip
restricție Loc
restricție rij
1 – 2 R– R AB 1 1 – 3 R E 2 1 – 4 – – – 2 – 3 C – C D 1 2 – 4 R B 2 3 – 4 R E 2
Σrij=8
Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
16
3.3. Conceperea de mecanisme cu bare articulate și cu roți dințate ca sisteme mecanice multicorp
Sinteza structurală a mecanismelor cu bare articulate și roți dințate pornește de la relația
(3.1.) luându-se în considerare ca date inițiale mobilitatea mecanismului (M), numărul de corpuri ce alcătuiesc sistemul mecanic (nc) și numărul mișcărilor anulate de restricțiile geometrice (rij).
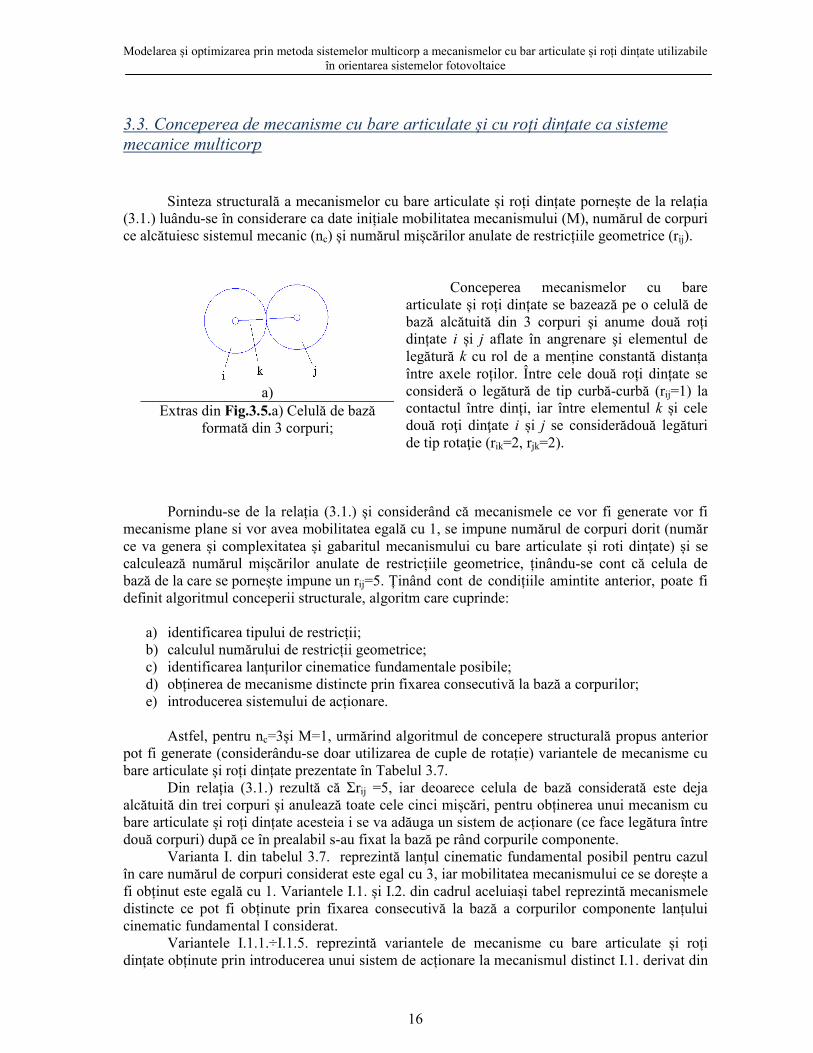
Conceperea mecanismelor cu bare articulate și roți dințate se bazează pe o celulă de bază alcătuită din 3 corpuri şi anume două roți dințate i și j aflate în angrenare şi elementul de legătură k cu rol de a menține constantă distanța între axele roților. Între cele două roți dințate se consideră o legătură de tip curbă-curbă (rij=1) la contactul între dinți, iar între elementul k și cele două roţi dinţate i și j se considerădouă legături de tip rotaţie (rik=2, rjk=2).
Pornindu-se de la relația (3.1.) și considerând că mecanismele ce vor fi generate vor fi mecanisme plane si vor avea mobilitatea egală cu 1, se impune numărul de corpuri dorit (număr ce va genera și complexitatea și gabaritul mecanismului cu bare articulate și roti dințate) și se calculează numărul mișcărilor anulate de restricțiile geometrice, ținându-se cont că celula de bază de la care se pornește impune un rij=5. Ținând cont de condițiile amintite anterior, poate fi definit algoritmul conceperii structurale, algoritm care cuprinde:
a) identificarea tipului de restricții; b) calculul numărului de restricții geometrice; c) identificarea lanțurilor cinematice fundamentale posibile; d) obținerea de mecanisme distincte prin fixarea consecutivă la bază a corpurilor; e) introducerea sistemului de acționare.
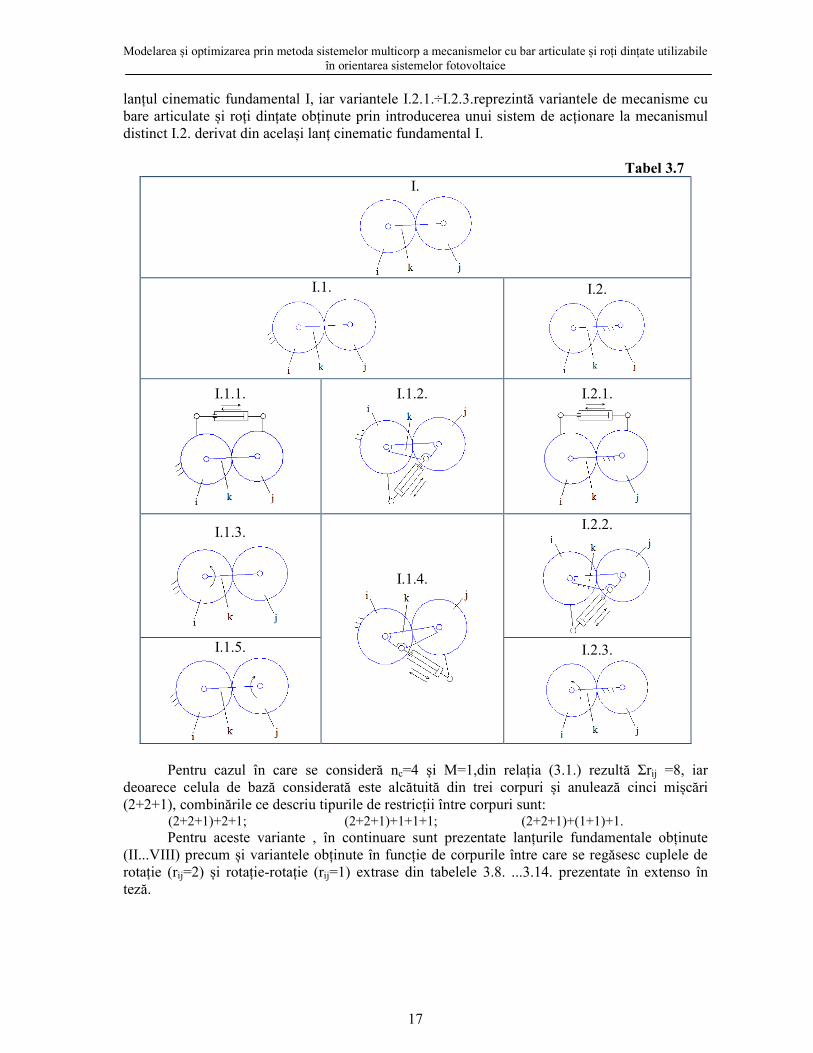
Astfel, pentru nc=3și M=1, urmărind algoritmul de concepere structurală propus anterior pot fi generate (considerându-se doar utilizarea de cuple de rotație) variantele de mecanisme cu bare articulate și roți dințate prezentate în Tabelul 3.7. Din relația (3.1.) rezultă că Σrij =5, iar deoarece celula de bază considerată este deja alcătuită din trei corpuri și anulează toate cele cinci mișcări, pentru obținerea unui mecanism cu bare articulate și roți dințate acesteia i se va adăuga un sistem de acționare (ce face legătura între două corpuri) după ce în prealabil s-au fixat la bază pe rând corpurile componente. Varianta I. din tabelul 3.7. reprezintă lanțul cinematic fundamental posibil pentru cazul în care numărul de corpuri considerat este egal cu 3, iar mobilitatea mecanismului ce se dorește a fi obținut este egală cu 1. Variantele I.1. și I.2. din cadrul aceluiași tabel reprezintă mecanismele distincte ce pot fi obținute prin fixarea consecutivă la bază a corpurilor componente lanțului cinematic fundamental I considerat. Variantele I.1.1.÷I.1.5. reprezintă variantele de mecanisme cu bare articulate și roți dințate obținute prin introducerea unui sistem de acționare la mecanismul distinct I.1. derivat din
a)
Extras din Fig.3.5.a) Celulă de bază formată din 3 corpuri;
Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
17
lanțul cinematic fundamental I, iar variantele I.2.1.÷I.2.3.reprezintă variantele de mecanisme cu bare articulate și roți dințate obținute prin introducerea unui sistem de acționare la mecanismul distinct I.2. derivat din același lanț cinematic fundamental I.
Tabel 3.7 I.
I.1.
I.2.
I.1.1.
I.1.2.
I.2.1.
I.1.3.
I.1.4.
I.2.2.
I.1.5.
I.2.3.
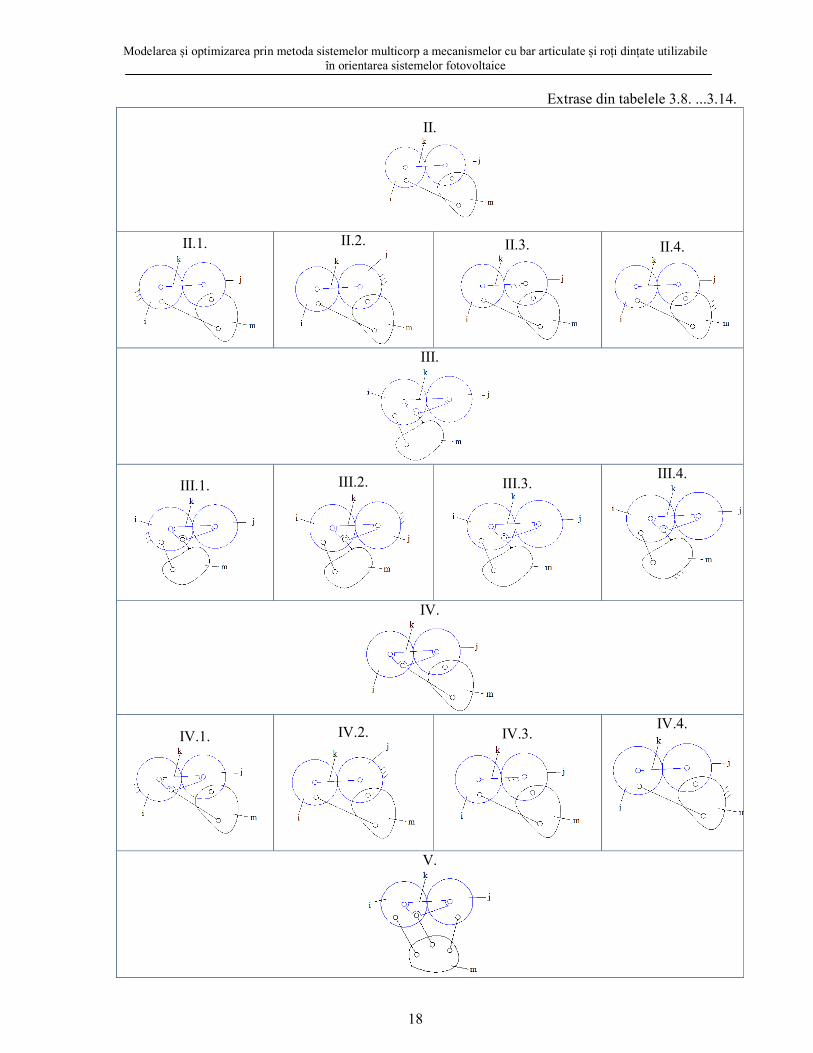
Pentru cazul în care se consideră nc=4 și M=1,din relația (3.1.) rezultă Σrij =8, iar deoarece celula de bază considerată este alcătuită din trei corpuri și anulează cinci mișcări (2+2+1), combinările ce descriu tipurile de restricții între corpuri sunt:
(2+2+1)+2+1; (2+2+1)+1+1+1; (2+2+1)+(1+1)+1. Pentru aceste variante , în continuare sunt prezentate lanțurile fundamentale obținute (II...VIII) precum și variantele obținute în funcție de corpurile între care se regăsesc cuplele de rotație (rij=2) și rotație-rotație (rij=1) extrase din tabelele 3.8. ...3.14. prezentate în extenso în teză.
Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
18
Extrase din tabelele 3.8. ...3.14.
II.
II.1.
II.2.
II.3.
II.4.
III.
III.1.
III.2.
III.3.
III.4.
IV.
IV.1.
IV.2.
IV.3.
IV.4.
V.

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
19
V.1.
V.2.
V.3.
–
VI.
VI.1.
VI.2.
VI.3.
VI.4.
VII.
VII.1.
VII.2.
VII.3.
VII.4.
VIII.
VIII.1.
VIII.2.
VIII.3.
VIII.4.
Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
20
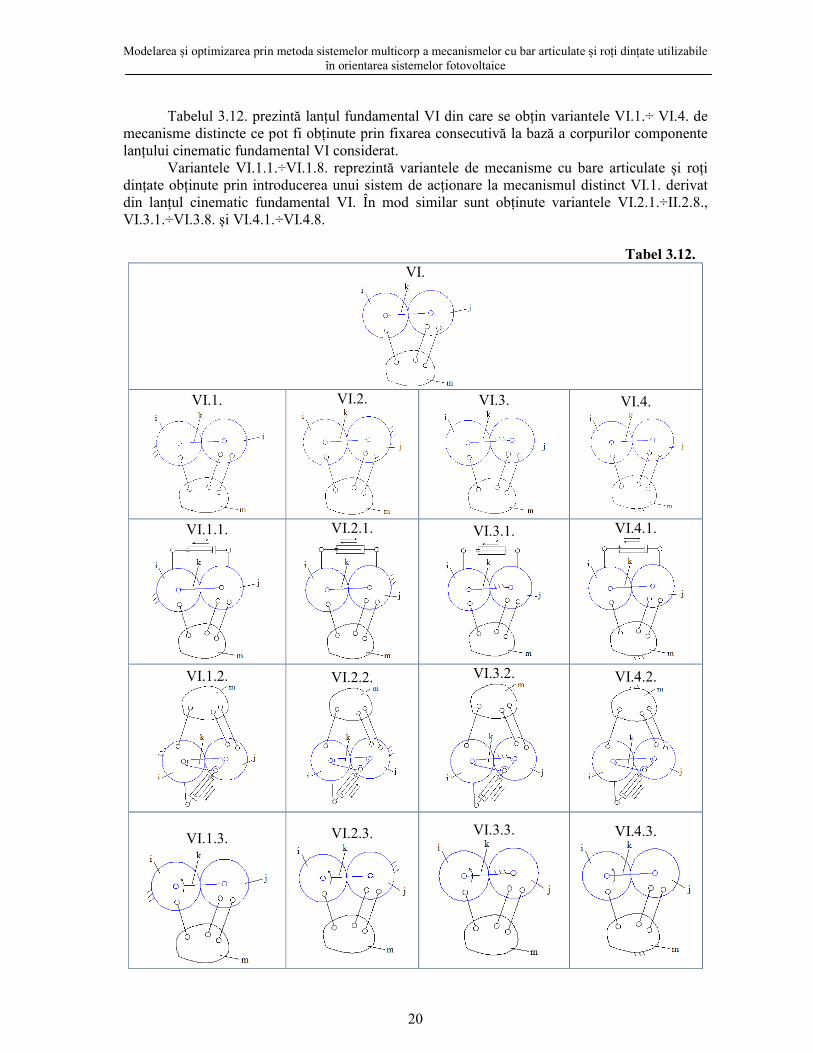
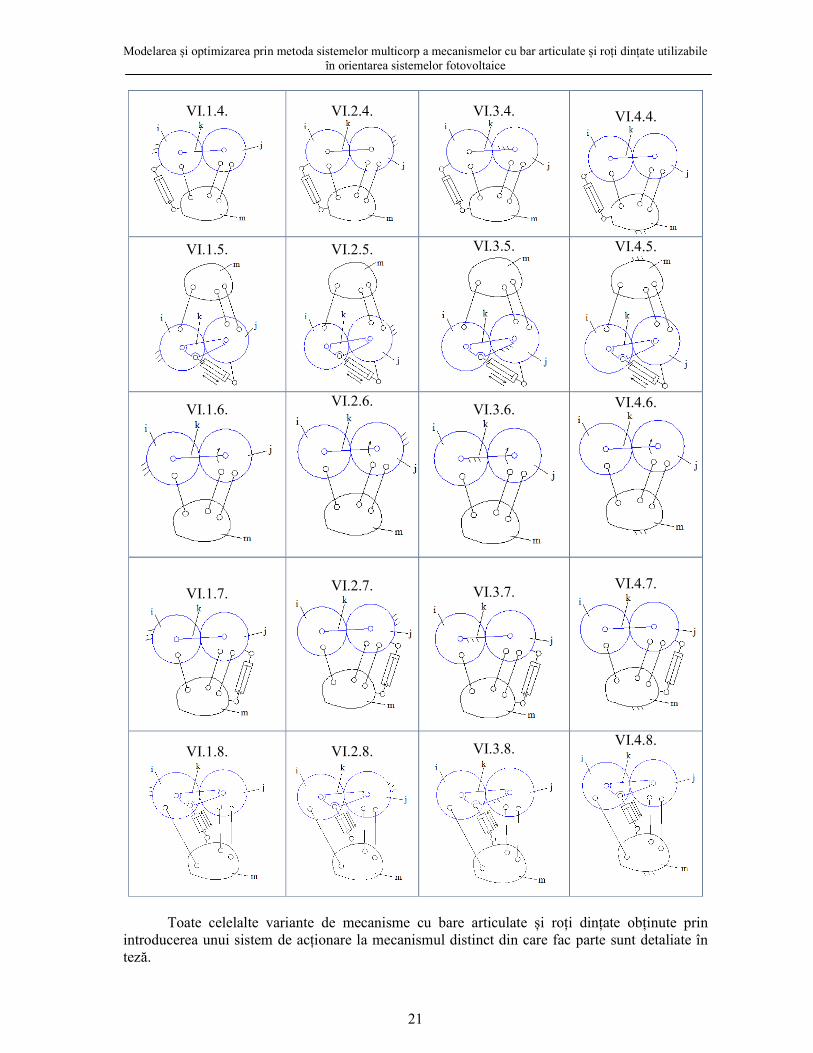
Tabelul 3.12. prezintă lanțul fundamental VI din care se obțin variantele VI.1.÷ VI.4. de mecanisme distincte ce pot fi obținute prin fixarea consecutivă la bază a corpurilor componente lanțului cinematic fundamental VI considerat. Variantele VI.1.1.÷VI.1.8. reprezintă variantele de mecanisme cu bare articulate și roți dințate obținute prin introducerea unui sistem de acționare la mecanismul distinct VI.1. derivat din lanțul cinematic fundamental VI. În mod similar sunt obținute variantele VI.2.1.÷II.2.8., VI.3.1.÷VI.3.8. și VI.4.1.÷VI.4.8.
Tabel 3.12. VI.
VI.1.
VI.2.
VI.3.
VI.4.
VI.1.1.
VI.2.1.
VI.3.1.
VI.4.1.
VI.1.2.
VI.2.2.
VI.3.2.
VI.4.2.
VI.1.3.
VI.2.3.
VI.3.3.
VI.4.3.
Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
21
VI.1.4.
VI.2.4.
VI.3.4.
VI.4.4.
VI.1.5.
VI.2.5.
VI.3.5.
VI.4.5.
VI.1.6.
VI.2.6.
VI.3.6.
VI.4.6.
VI.1.7.
VI.2.7.
VI.3.7.
VI.4.7.
VI.1.8.
VI.2.8.
VI.3.8.
VI.4.8.
Toate celelalte variante de mecanisme cu bare articulate și roți dințate obținute prin introducerea unui sistem de acționare la mecanismul distinct din care fac parte sunt detaliate în teză.

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
22
Pentru cazul în care se consideră nc=5 și M=1,din relația (1) rezultă că ∑��� = 8, iar deoarece celula de bază considerată este alcătuită din trei corpuri și anulează cinci mișcări (2+2+1), combinările ce descriu tipurile de restricții între corpuri sunt:
1) (2+2+1)+1+1+1+1+1+1; 2) (2+2+1)+(1+1)+1+1+1+1; 3) (2+2+1)+(1+1)+(1+1)+1+1; 4) (2+2+1)+(1+1)+(1+1)+(1+1); 5) (2+2+1)+2+1+1+1+1; 6) (2+2+1)+(1+1)+2+1+1; 7) (2+2+1)+2+2+1+1; 8) (2+2+1)+(1+1)+(1+1)+2; 9) (2+2+1)+(1+1)+2+2; 10) (2+2+1)+2+2+2.
Se pot determina astfel lanțurile cinematice fundamentale pe baza cărora se vor genera mecanisme cu bare articulate și roți dințate prin legarea consecutivă la bază a corpurilor componente. Pentru obținerea de mecanisme concrete se continuă prin adăugarea de sisteme de acționare la mecanismele la care în prealabil s-a realizat fixarea corpurilor componente. 3.4. Concluzii și contribuții Principalele concluzii rezultate din analiza și conceperea (sinteza) mecanismelor cu bare articulate și roți dințate sunt: 1. Metoda sistemelor multicorp permite analiza unitară a tuturor tipurilor de mecanisme cu
bare articulate ș roți dințate indiferent de configurația acestora, de complexitate, de numărul de angrenaje cuprinse, de mobilitate;
2. Aplicarea metodei sistemelor multicorp în conceperea mecanismelor cu bare articulate și roți dințate conduce în baza datelor inițiale (mobilitate, număr de corpuri, spațiul mișcării) la totalitatea lanțurilor fundamentale și a mecanismelor aferente lor, prin algoritmul propus;
3. Descrierea mecanismelor cu bare articulate și roți dințate ca sisteme mecanice multicorp permite integrarea studiului acestora în produsele din care fac parte, prin utilizarea de softuri comerciale și prototiparea virtuală a produselor;
4. Variantele de mecanisme cu bare articulate și roți dințate obținute prin metod sistemelor multicorp constituie o importantă bază de date (de mecanisme) din care pot fi selectate cele care corespund unui anumit tip de aplicație.
Principalele contribuții sunt: a. Introducerea metodei sistemelor multicorp în analiza și sinteza (conceperea) mecanismelor
cu bare articulate și roți dințate; b. Elaborarea de algoritmi pentru analiza și sinteza acestor mecanisme prin metoda sistemelor
multicorp; c. Identificarea tuturor variantelor de combinări ce descriu tipurile de restricții între corpuri
pentru cazurile când � = 1, �� = 3, � = 1, �� = 4 și � = 1, �� = 5; d. Identificarea tuturor tipurilor de lanțuri cinematice fundamentale pentru � = 1, �� = 3 și � = 1, �� = 4 precum și a tuturor tipurilor de mecanisme cu bare articulate și roți dințate
obținute prin legarea consecutivă la bază a corpurilor componente lanțurilor cinematice fundamentale;
e. Identificarea pentru � = 1, �� = 3 și � = 1, �� = 4 a tuturor mecanismelor cu bare articulate și roți dințate având sisteme de acționare atașate;
f. Dezvoltarea de mecanisme concrete cu bare articulate și roți dințate.

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
23
4.Modelarea cinematică a mecanismelor plane cu bare articulate și roți dințate ca sisteme multicorp
4.1. Obiectivele și etapele modelării cinematice
Obiectivul modelării cinematice, în general, este de a defini modelul cinematic al
sistemului multicorp în scopul studiului mișcării corpurilor mobile pentru un sistem dat (poziții, viteze, accelerații ale corpurilor și ale punctelor de interes ale acestora – analiza cinematică directă), de a stabili mișcările independente pentru mișcări impuse unor corpuri sau puncte ale acstora (analiza cinematică indirectă), de a determina geometria sistemului pentru o cinematică impusă corpurilor sau unor puncte ale acestora (sinteza-optimizarea cinematică) și de a realiza simularea comportamentului cinematic al sistemului mecanic pentru mișcări independente cunoscute.
Etapele modelării cinematice sunt următoarele [78]:
a) Alegerea sistemului de referință Pentru fiecare corp se alege sistemul lui de referință. Astfel, pentru corpul fix se alege
sistemul Oxy, iar pentru corpurile mobile Oixiyi (i=2, 3...,nc). Sistemul de referință atașat corpului mobil este sistemul ortogonal având originea într-un
punct de interes ce aparține corpului căruia acesta îi este atașat sau corespunzător sistemului tehnologic al corpului și a cărui orientare este convenabil aleasă.
b) Definirea geometriei corpurilor sistemului multicorp
Pe fiecare corp se definesc parametrii geometrici caracteristici (puncte, drepte) prin coordonate și vectori exprimate în sistemele atașate corpurilor. Parametrii geometrici sunt mărimi geometrice constante și formează modelul geometric al sistemului multicorp. Se identifică un număr minim și suficient de parametri geometrici care descriu un sistem multicorp dat. Dacă numărul parametrilor geometrici aleși este mai mic decât cel necesar, atunci geometria sistemului multicorp nu poate fi descrisă, iar dacă numărul parametrilor geometrici aleși este mai mare decât cel necesar, atunci ei nu sunt independenți. Ca urmare, rezultatele studiului cinematic vor fi eronate.
c) Alegerea coordonatelor generalizate Poziția și orientarea corpurilor mobile în sistemul fix este definită analitic prin coordonate generalizate qi, care sunt în general mărimi variabile în timp și a căror cunoaștere determină mișcarea corpurilor mobile. Numărul coordonatelor generalizate independente pentru un corp mobil considerat corp liber în spațiul S este egal cu numărul de dimensiuni ale spațiului în care are loc mișcarea.
d) Modelarea restricțiilor geometrice Restricțiile geometrice întâlnite la mecanismele plane cu bare articulate și roți dințate sunt restricții simple (rotație – R, translație – T, curbă-curbă – CC) și restricții compuse (rotație-rotație – RR, rotație-translație – RT). Funcțiile analitice care descriu aceste restricții sunt detaliate în teză.
e) Modelarea restricțiilor cinematice Restricțiile cinematice se modelează prin funcții în care timpul apare explicit, variabila
fiind dată de natura mișcării introduse (rotație/translație). Formele generale sunt:
Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
24
φi-f(t)=0; sij-f(t)=0. (4.24.) f) Formarea sistemului funcțiilor de poziție
Ecuațiile de restricții geometrice și cinematice formează un sistem determinat de g ecuații cu g necunoscute, prin a cărui rezolvare (de obicei pe cale numerică) se obțin variațiile în timp ale coordonatelor generalizate, adică poziția corpurilor mobile.
Prin derivarea în raport cu timpul se obțin vitezele și accelerațiile. În continuare, pentru un mecanism de tip triunghi cu bare articulate și roți dințate, se
dezvoltă metoda de analiză cinematică anterior descrisă.
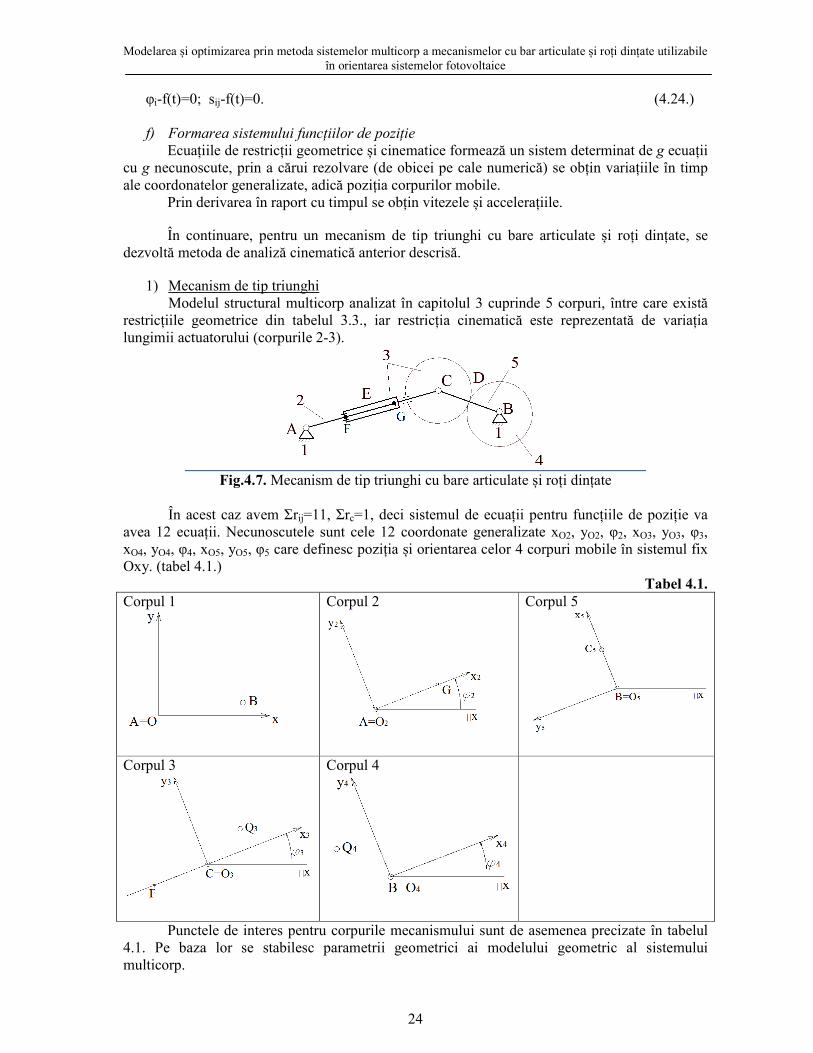
1) Mecanism de tip triunghi Modelul structural multicorp analizat în capitolul 3 cuprinde 5 corpuri, între care există restricțiile geometrice din tabelul 3.3., iar restricția cinematică este reprezentată de variația lungimii actuatorului (corpurile 2-3).
Fig.4.7. Mecanism de tip triunghi cu bare articulate și roți dințate
În acest caz avem Σrij=11, Σrc=1, deci sistemul de ecuații pentru funcțiile de poziție va avea 12 ecuații. Necunoscutele sunt cele 12 coordonate generalizate xO2, yO2, φ2, xO3, yO3, φ3, xO4, yO4, φ4, xO5, yO5, φ5 care definesc poziția și orientarea celor 4 corpuri mobile în sistemul fix Oxy. (tabel 4.1.)
Tabel 4.1. Corpul 1
Corpul 2
Corpul 5
Corpul 3
Corpul 4
Punctele de interes pentru corpurile mecanismului sunt de asemenea precizate în tabelul 4.1. Pe baza lor se stabilesc parametrii geometrici ai modelului geometric al sistemului multicorp.

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
25
��������������� ��� − ��� = 0;��� − ��� = 0;
��� − ��� = 0;��� − ��� = 0;� !"�#$� $"�#$ = % !"%#$% $"%#$ ; � !"�#$� $"�#$ = % !"%#$% $"%#$ ;& = '$()$*+$,*-.().*+.,"'.∙0'$1'. ;
�23 − �24 = 0;�23 − �24 = 0;��� − ��4 = 0;��� − ��4 = 0;5(678, :, = 0.
< (4.25.)
Ecuațiile sistemului 4.25. se pot detalia funcție de parametrii geometrici și coordonatele generalizate, iar apoi prin rezolvarea pe cale numerică a sistemului se obțin coordonatele generalizate ca funcție de timp. În mod similar sunt prezentate în cadrul tezei mecanismele de tip 3RT (fig 4.8. și tabel4.2), patrulater (fig 4.9. și tabel 4.3), și romb (fig 4.10. și tabel 4.4),
Tabel 4.2.
Corpul 1
Corpul 2
Corpul 5
Corpul 3
Corpul 4
Fig.4.8. Mecanism de tip 3RT cu bare articulate și roți dințate

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
26
Tabel 4.3.
Fig.4.9. Mecanism de tip
patrulater cu bare articulate și roți dințate
Corpul 1
Corpul 2
Corpul 3
Corpul 4
Corpul 5
Tabel 4.4. Corpul 1
Corpul 2
Corpul 3
Corpul 4
Fig.4.10. Mecanism de tip
romb cu bare articulate și roți dințate
Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
4.2. Sinteza geometrică a mecanismelor. Analiza eficienței orientării
Se efectuează în continuare sinteza geometrică urmată de o analiză a răspunsului
energetic pentru mecanismele de tip triunghi, 3RT și patrulater, în cazul aplicării acestora la orientarea sistemelor fotovoltaice
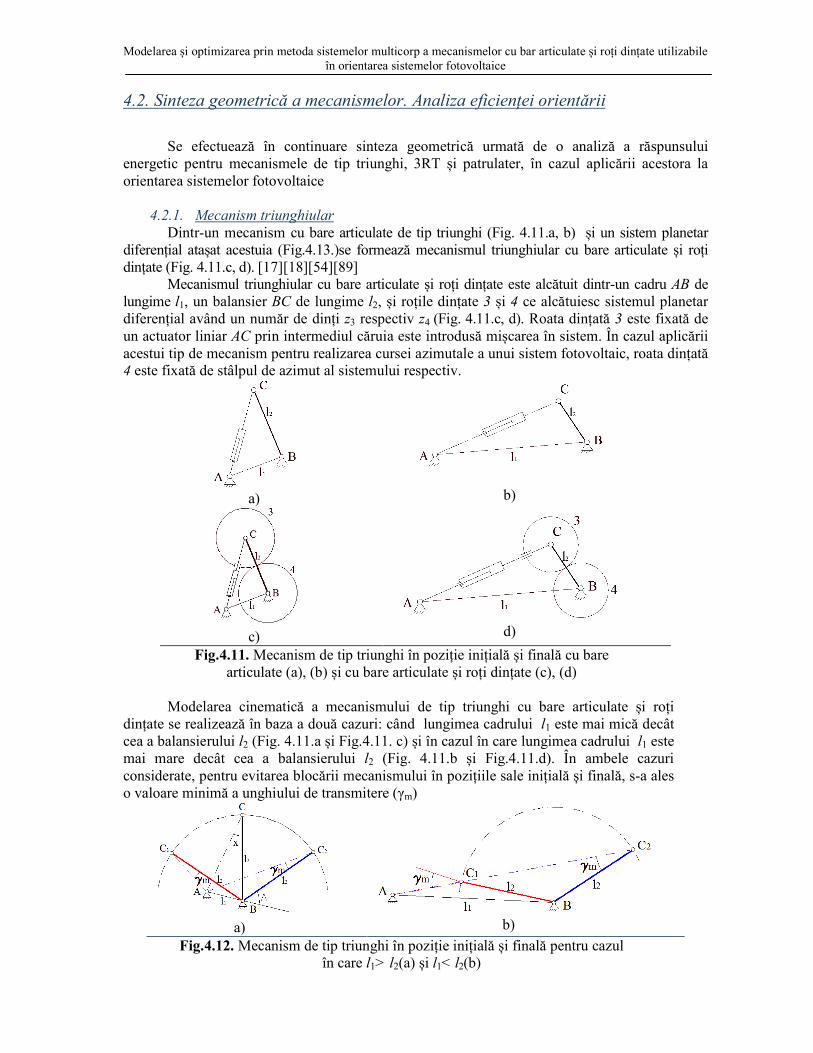
4.2.1. Mecanism triunghiular Dintr-un mecanism cu bare articulate de tip triunghi (Fig. 4.11.a, b) și un sistem planetar
diferențial atașat acestuia (Fig.4.13.)se formează mecanismul triunghiular cu bare articulate și roți dințate (Fig. 4.11.c, d). [17][18][54][89]
Mecanismul triunghiular cu bare articulate și roți dințate este alcătuit dintr-un cadru AB de lungime l1, un balansier BC de lungime l2, și roțile dințate 3 și 4 ce alcătuiesc sistemul planetar diferențial având un număr de dinți z3 respectiv z4 (Fig. 4.11.c, d). Roata dințată 3 este fixată de un actuator liniar AC prin intermediul căruia este introdusă mișcarea în sistem. În cazul aplicării acestui tip de mecanism pentru realizarea cursei azimutale a unui sistem fotovoltaic, roata dințată 4 este fixată de stâlpul de azimut al sistemului respectiv.
a)
b)
c)
d)
Fig.4.11. Mecanism de tip triunghi în poziție inițială și finală cu bare articulate (a), (b) și cu bare articulate și roți dințate (c), (d)
Modelarea cinematică a mecanismului de tip triunghi cu bare articulate și roți dințate se realizează în baza a două cazuri: când lungimea cadrului l1 este mai mică decât cea a balansierului l2 (Fig. 4.11.a și Fig.4.11. c) și în cazul în care lungimea cadrului l1 este mai mare decât cea a balansierului l2 (Fig. 4.11.b și Fig.4.11.d). În ambele cazuri considerate, pentru evitarea blocării mecanismului în pozițiile sale inițială și finală, s-a ales o valoare minimă a unghiului de transmitere (γm)
a)
b)
Fig.4.12. Mecanism de tip triunghi în poziție inițială și finală pentru cazul în care l1> l2(a) și l1< l2(b)

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
Aplicarea Teoremei Sinusurilor la mecanismul de tip triunghi din figura 4.12.a pentru triunghiurile ABC1 și ABC2 conduce la obținerea următoarelor relații:
; (4.29.)
; (4.30.)
; (4.31.)
. (4.32.)
Se poate astfel scrie relația de calcul pentru cursa unghiulară a balansierului BC după cum urmează:
( )kBCC m /)(sinarcsin2180122 γϕ −°==∆ , (4.33.)
unde . (4.34.)
Prin aplicarea Teoremei Sinusurilor la mecanismul de tip triunghi din figura 4.12.b de această dată, conduce la obșinerea următoarelor corelații:
; (4.35.)
; (4.36.)
; (4.37.)
. (4.38.)
Conform relațiilor (4.36.) și (4.37.) se poate concluziona că punctele C1, A și C2 sunt colineare. Astfel, cursa unghiulară a balansierului φ2 și cursa s a actuatorului liniar devin:
; (4.39.)
. (4.40.)
Raportul interior de transmitere al mecanismului planetar diferențial suprapus mecanismului cu bare articulate de tip triunghi este de forma:
. (4.41.)
Considerând atât mecanismul triunghiular cu bare articulate în ambele sale forme constructive (l1> l2și l1< l2) cât și mecanismul planetar diferențial (Fig.4.13.), se poate determina cursa unghiulară a mecanismului de tip triunghi cu bare articulate și roți dințate după cum urmează:
; (4.42.)
a) pt. l1< l2:
; (4.43.)
; (4.44.)
; (4.45.)
b) pt. l1> l2:
; (4.46.)
; (4.47.)
; (4.48.)
Utilizând relația 4.33, în figura 4.14. este prezentată o familie de curbe ce descrie variația cursei unghiulare a balansierului BC în funcție de unghiul de transmitere minim admis γm pentru
)sin()sin(sin 2
2
2
21
ABC
AC
ABC
ll
m
==γ
( ) °≤⋅= 90sin)/(arcsin 122 mllABC γ
)sin()sin(sin 1
1
1
21
ABC
AC
ABC
ll
m
==γ
( )mllABC γsin)/(arcsin180 121 ⋅−°=
21 / llk =
)sin()sin(sin 2
2
2
21
ABC
AC
ABC
ll
m
==γ
( )mllABC γsin)/(arcsin 122 ⋅=
)sin()sin(sin 1
1
1
21
ABC
AC
ABC
ll
m
==γ
( )mllABC γsin)/(arcsin 121 ⋅=
mBCC γϕ 2180122 −°==∆
mlCCs γcos2 212 ==
4
3
3
4340 z
zii
h
hh −=ωω
==−
−−
22304 ϕϕϕ ∆+∆⋅=∆ −i
0arcsin||23 <−=−−=∆ − kx mm γγϕ
( ) 0/)(sinarcsin9022 >−°==∆ kBCC mγϕ
( )kki mm /)(sinarcsin)arcsin(90 04 γγϕ −−+°=∆
0180223 <°−=∆ − mγϕ
02180212 >−°==∆ mBCC γϕ
mmi γγϕ 2180)1802(04 −°+°−=∆

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
mecanismul triunghiular cu bare articulate în cazul în care lungimea cadrului l1 este mai mică decât cea a balansierului l2. Un alt parametru pe baza căruia s-au construit aceste familii de curbe este k=l1/l2, parametru cu valori în intervalul 0,45...1.
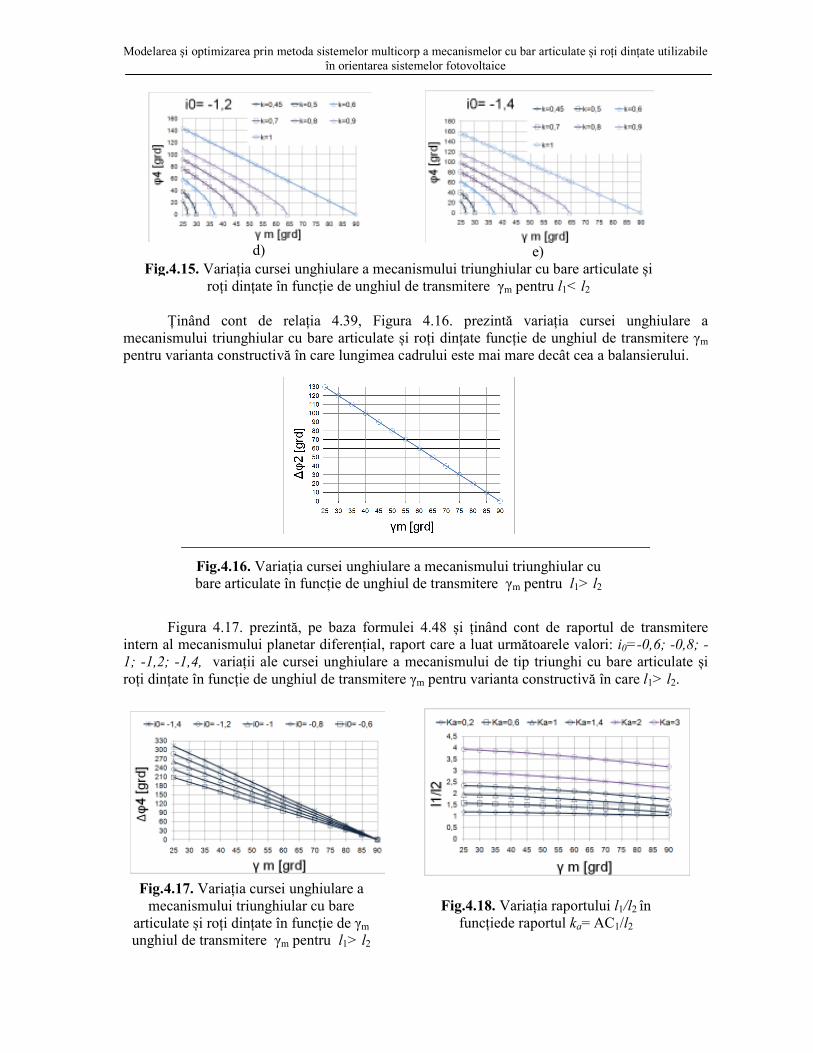
Ținând cont de relația 4.45, Figura 4.15. prezintă variația cursei unghiulare a
mecanismului triunghiular cu bare articulate și roți dințate funcție de unghiul de transmitere γm și parametrul k=l1/l2, pentru varianta constructivă în care lungimea cadrului este mai mică decât cea a balansierului. De asemenea s-a ținut cont de raportul de transmitere intern al mecanismului planetar diferențial, raport care a luat următoarele valori: i0=-0,6; -0,8; -1; -1,2; -1,4.
După cum se poate observa din Fig. 4.14. și 4.15., prin adăugarea unui mecanism planetar diferențial la un mecanism triunghiular cu bare articulate având cadrul de lungime mai mică decât balansierul, nu se obține o amplificare a cursei mecanismului ci din contră, mecanismul cu bare articulate și roți dințate de tip triunghi realizează curse unghiulare inferioare. Excepție face mecanismul cu bare articulate și roți dințate la care raportul intern al roților dințate este i0= -1,2 respectiv -1,4, dar amplificarea obținută este nesimnificativă, de ordinul a câteva grade unghiulare.
a)
b)
c)
Fig.4.14. Variația cursei unghiulare a mecanismului triunghiular cu bare
articulate în funcție de unghiul de transmitere γm pentru l1< l2
Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
d) e) Fig.4.15. Variația cursei unghiulare a mecanismului triunghiular cu bare articulate și
roți dințate în funcție de unghiul de transmitere γm pentru l1< l2 Ținând cont de relația 4.39, Figura 4.16. prezintă variația cursei unghiulare a
mecanismului triunghiular cu bare articulate și roți dințate funcție de unghiul de transmitere γm pentru varianta constructivă în care lungimea cadrului este mai mare decât cea a balansierului.
Fig.4.16. Variația cursei unghiulare a mecanismului triunghiular cu bare articulate în funcție de unghiul de transmitere γm pentru l1> l2
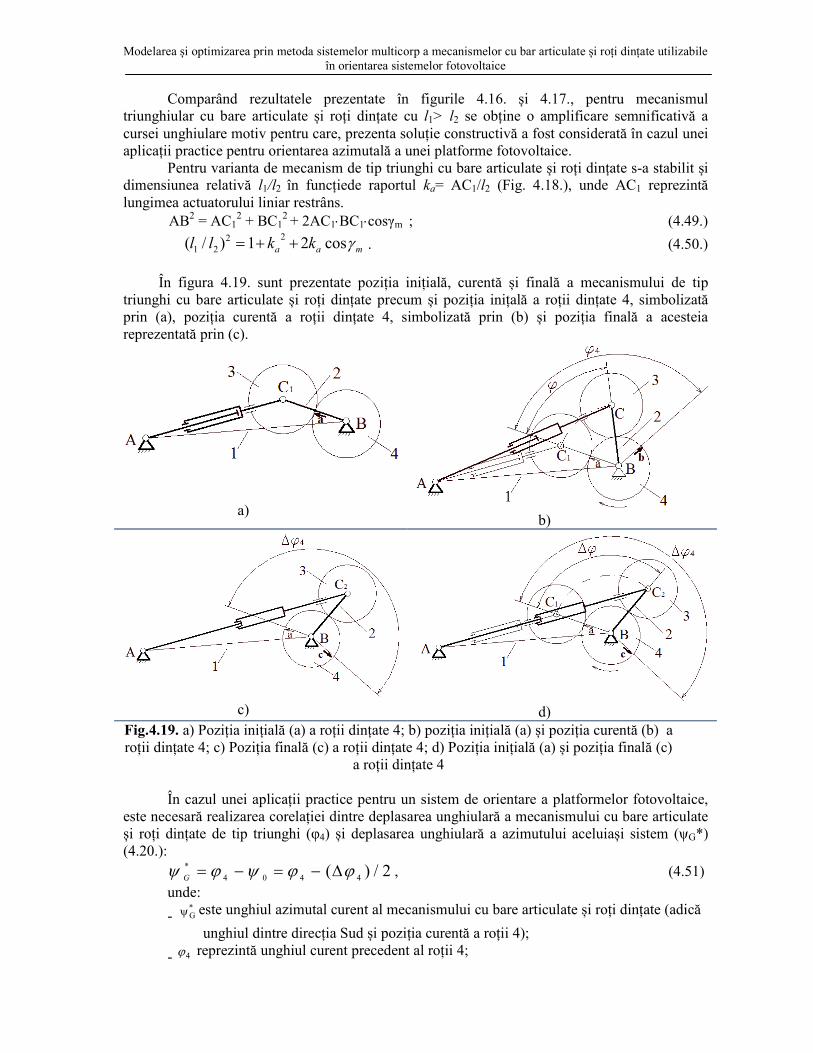
Figura 4.17. prezintă, pe baza formulei 4.48 și ținând cont de raportul de transmitere
intern al mecanismului planetar diferențial, raport care a luat următoarele valori: i0=-0,6; -0,8; -1; -1,2; -1,4, variații ale cursei unghiulare a mecanismului de tip triunghi cu bare articulate și roți dințate în funcție de unghiul de transmitere γm pentru varianta constructivă în care l1> l2.
Fig.4.17. Variația cursei unghiulare a
mecanismului triunghiular cu bare articulate și roți dințate în funcție de γm unghiul de transmitere γm pentru l1> l2
Fig.4.18. Variația raportului l1/l2 în funcțiede raportul ka= AC1/l2
Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
Comparând rezultatele prezentate în figurile 4.16. și 4.17., pentru mecanismul
triunghiular cu bare articulate și roți dințate cu l1> l2 se obține o amplificare semnificativă a cursei unghiulare motiv pentru care, prezenta soluție constructivă a fost considerată în cazul unei aplicații practice pentru orientarea azimutală a unei platforme fotovoltaice.
Pentru varianta de mecanism de tip triunghi cu bare articulate și roți dințate s-a stabilit și dimensiunea relativă l1/l2 în funcțiede raportul ka= AC1/l2 (Fig. 4.18.), unde AC1 reprezintă lungimea actuatorului liniar restrâns.
AB2 = AC12 + BC1
2 + 2AC1⋅BC1⋅cosγm ; (4.49.)
maa kkll γcos21)/( 2221 ++= . (4.50.)
În figura 4.19. sunt prezentate poziția inițială, curentă și finală a mecanismului de tip
triunghi cu bare articulate și roți dințate precum și poziția inițală a roții dințate 4, simbolizată prin (a), poziția curentă a roții dințate 4, simbolizată prin (b) și poziția finală a acesteia reprezentată prin (c).
a) b)
c) d) Fig.4.19. a) Poziția inițială (a) a roții dințate 4; b) poziția inițială (a) și poziția curentă (b) a roții dințate 4; c) Poziția finală (c) a roții dințate 4; d) Poziția inițială (a) și poziția finală (c)
a roții dințate 4
În cazul unei aplicații practice pentru un sistem de orientare a platformelor fotovoltaice, este necesară realizarea corelației dintre deplasarea unghiulară a mecanismului cu bare articulate și roți dințate de tip triunghi (φ4) și deplasarea unghiulară a azimutului aceluiași sistem (ψG*) (4.20.):
, (4.51)
unde:
- este unghiul azimutal curent al mecanismului cu bare articulate și roți dințate (adică
unghiul dintre direcția Sud și poziția curentă a roții 4);
- reprezintă unghiul curent precedent al roții 4;
2/)( 4404
* ϕϕψϕψ ∆−=−=G
*Gψ
4ϕ

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
- ψ0 =(∆φ4)/2 este unghiul dintre cele două poziții de început (a)=BC1 și direcția Sud. Se pot astfel calcula variațiile de intrare și ieșire a parametrilor panoului fotovoltaic cu
sistem de tracking. Acestea sunt prezentate în Figura 4.23.: s=s (timp solar) și ψ* =ψ* (timp solar). [18]
Fig.4.23. Variațiile pasului
corespondent deplasării actuatorului liniar s=s(timp solar) și deplasarea unghiulară a platformei cu azimut ψ*G=ψ*G (timp solar) în timpul
Solstițiului de Vară în Brașov, România
Fig.4.24. Variații ale radiației solare directe disponibile (B) și radiației
primate de către platforma PV (B*), în condiții de cer senin, în timpul
Solstițiului de Vară în Brașov, România
Radiația solară directă disponibilă B și radiația directă primită de sistemul fotovoltaic B*
sunt calculate în condiții de cer senin folosind următoarele ecuații [48]: , (4.52.)
unde: ; (4.53.)
TR- reprezintă factorul de turbiditate pentru zona Brașov, (TR ≈ 3 [76]); N – este numărul zilei din an;
( )[ ]αsin4.99.0/exp0 +−= RTBB
[ ]27.29856.0cos(0334.0113670 −⋅⋅+⋅= NB
Fig.4.20. Pozițiile inițială și finală ale mecanismului triunghiular cu bare articulate și roți dințate considerându-se poziția Sudului S
Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
Radiația directă care cade pe suprafața modulului PV poate fi estimată folosind legea lui
Lambert [75]: ; (4.54.)
unde: υ este unghiul de incidență [81]: ; (4.55.)
Variația radiației solare directe disponibilă și radiației primită de suprafața modulului fotovoltaic sunt prezentate în Figura 4.24. Se poate observa că radiația câștigată de tracker-ul monoaxial aproape ajunge la valorile radiației disponibile; diferența este dată de unghiul de elevație constant (α*=45˚).
Pentru a evalua performanța sistemului de tracking, trebuie calculată eficiența tracking-ului:
; (4.56.)
unde: EB reprezintă energia radiației solare disponibile (B):
; (4.57.)
și: EB* reprezintă energia radiației solare directe primită pe suprafața panoului fotovoltaic:
. (4.58.)
Eficiența de tracking a sistemului mono-axial acționat cu ajutorul mecanismului de tip
triunghi cu bare articulate și roți dințate, obținută în timpul Solstițiului de Vară, este de 94.42%; adică procentajul energiei solare disponibile care cade pe platforma fotovoltaică.
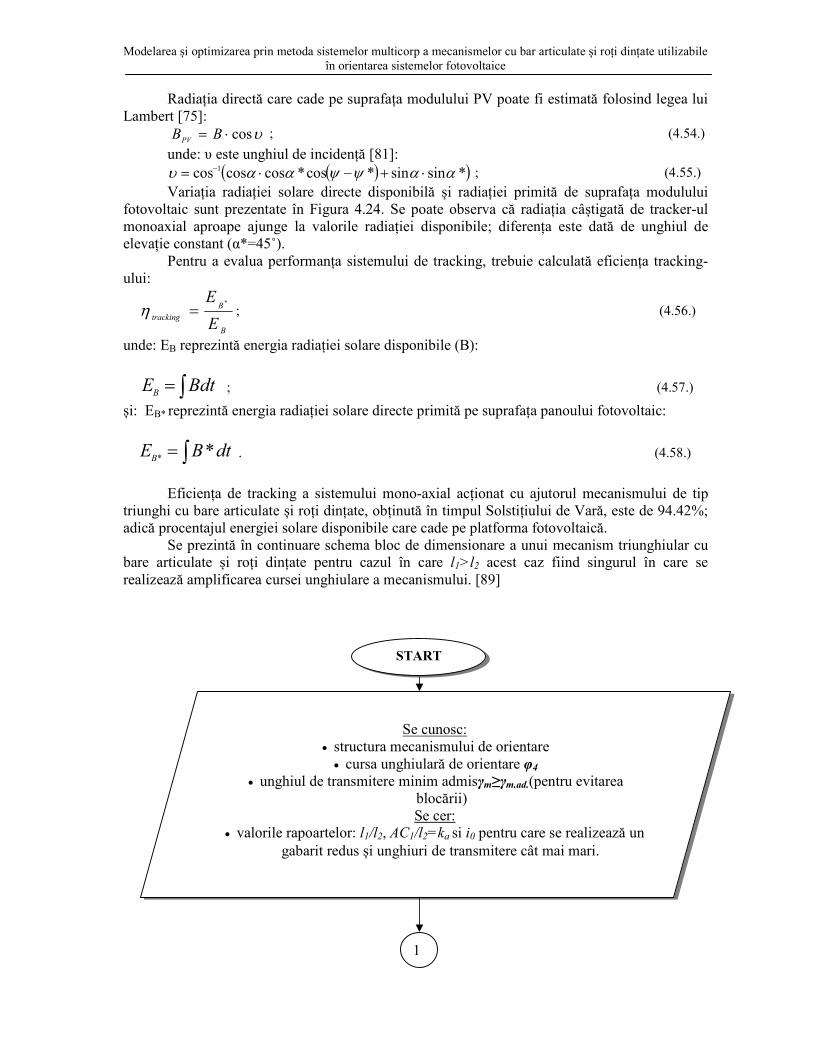
Se prezintă în continuare schema bloc de dimensionare a unui mecanism triunghiular cu bare articulate și roți dințate pentru cazul în care l1>l2 acest caz fiind singurul în care se realizează amplificarea cursei unghiulare a mecanismului. [89]
υcos⋅= BBPV
( )( )*sinsin*cos*coscoscos 1 ααψψααυ ⋅+−⋅= −
B
B
tracking E
E *
=η
∫= BdtEB
∫= dtBEB **
START
Se cunosc: • structura mecanismului de orientare • cursa unghiulară de orientare φ4
• unghiul de transmitere minim admisγm≥γm.ad.(pentru evitarea blocării) Se cer:
• valorile rapoartelor: l1/l2, AC1/l2=ka si i0 pentru care se realizează un gabarit redus și unghiuri de transmitere cât mai mari.
1
Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
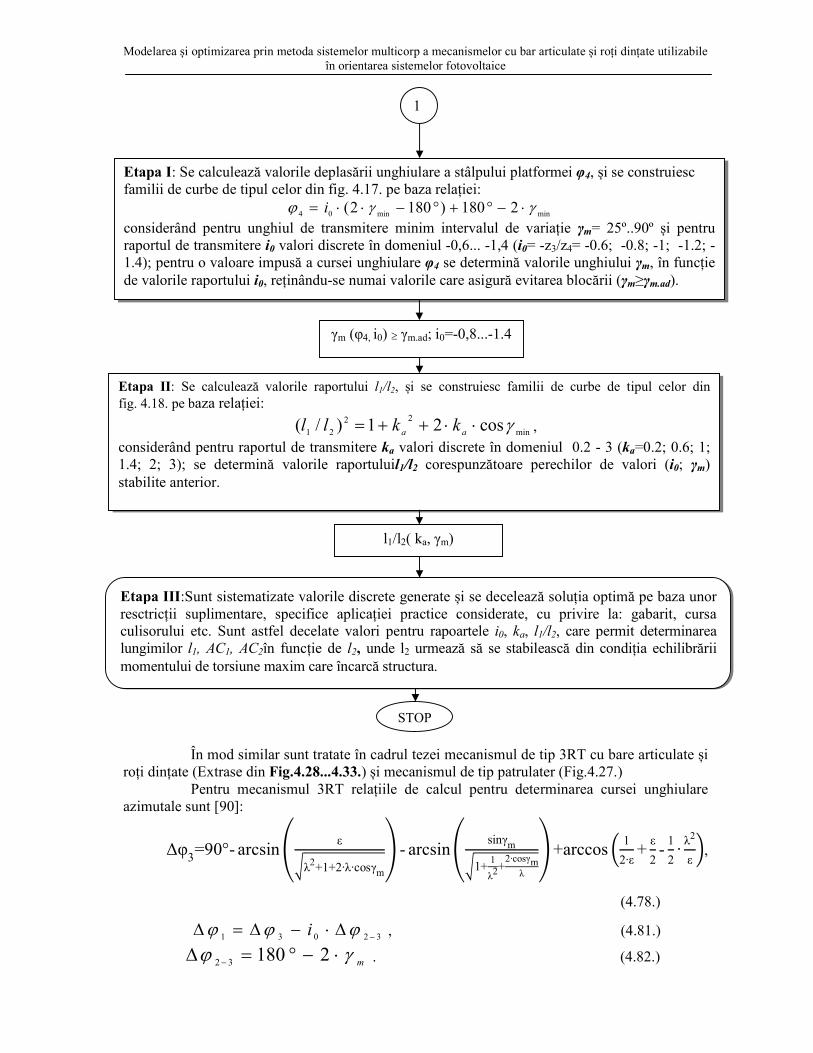
În mod similar sunt tratate în cadrul tezei mecanismul de tip 3RT cu bare articulate și roți dințate (Extrase din Fig.4.28...4.33.) și mecanismul de tip patrulater (Fig.4.27.) Pentru mecanismul 3RT relațiile de calcul pentru determinarea cursei unghiulare azimutale sunt [90]:
∆φ3=90°- arcsin= ε
>λ2+1+2·λ·cosγm
? - arcsin= sinγm>1+1
λ2+2·cosγm
λ
?+arccos @ 1
2·ε+
ε
2-
1
2·
λ2
εA,
(4.78.)
, (4.81.)
. (4.82.)
32031 −∆⋅−∆=∆ ϕϕϕ i
mγϕ ⋅−°=∆ − 218032
Etapa II: Se calculează valorile raportului l1/l2, și se construiesc familii de curbe de tipul celor din fig. 4.18. pe baza relației:
,
considerând pentru raportul de transmitere ka valori discrete în domeniul 0.2 - 3 (ka=0.2; 0.6; 1; 1.4; 2; 3); se determină valorile raportuluil1/l2 corespunzătoare perechilor de valori (i0; γm) stabilite anterior.
min
22
21 cos21)/( γ⋅⋅++= aa kkll
Etapa I: Se calculează valorile deplasării unghiulare a stâlpului platformei φ4, și se construiesc familii de curbe de tipul celor din fig. 4.17. pe baza relației:
considerând pentru unghiul de transmitere minim intervalul de variație γm= 25º..90º și pentru raportul de transmitere i0 valori discrete în domeniul -0,6... -1,4 (i0= -z3/z4= -0.6; -0.8; -1; -1.2; -1.4); pentru o valoare impusă a cursei unghiulare φ4 se determină valorile unghiului γm, în funcție de valorile raportului i0, reținându-se numai valorile care asigură evitarea blocării (γm≥γm.ad).
minmin04 2180)1802( γγϕ ⋅−°+°−⋅⋅= i
Etapa III:Sunt sistematizate valorile discrete generate și se decelează soluția optimă pe baza unor resctricții suplimentare, specifice aplicației practice considerate, cu privire la: gabarit, cursa culisorului etc. Sunt astfel decelate valori pentru rapoartele i0, ka, l1/l2, care permit determinarea lungimilor l1, AC1, AC2în funcție de l2, unde l2 urmează să se stabilească din condiția echilibrării momentului de torsiune maxim care încarcă structura.
STOP
1
γm (φ4, i0) γm.ad; i0=-0,8...-1.4
≥
l1/l2( ka, γm)

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
Extrase din Fig.4.28...4.35. a) Mecanism 3RT cu bare articulate și roți dințate și
variații ale cursei sale unghiulare funcție de raportul interior al angrenajului planetar diferențial[19]

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
În cazul mecanismului patrulater, relația de calcul pentru determinarea cursei unghiulare azimutale este:
. (4.99.)
Extrase din Fig.4.41...4.46. Mecanism patrulater cu bare articulate și roți dințate și
variații ale cursei sale unghiulare funcție de raportul interior al angrenajului planetar diferențial[20]
( )( )( )
−⋅++−⋅+
−
⋅
−⋅++⋅−
−°−⋅⋅=
mmm
mmm
mmm
mmm
l
l
l
li
γγγγγγ
εγγγ
γγγϕ∆
cos3cos2cos1
sin3sin2sinarctan
coscos3cos2cos1
sin22sinarcsin)1802(01

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
37
Mecanismul de tip romb este considerat ca fiind un caz particular al mecanismului de tip patrulater [91]
4.3. Concluzii și contribuții
Principalele concluzii ale acestui capitol sunt: 1. Dintre cele trei tipuri de mecanisme cu bare articulate și roți dințate analizate anterior poate
observa că mecanismul triunghiular este cel mai simplu de realizat constructiv pe când mecanismul patrulater este cel mai complex din punct de vedere constructiv;
2. Cursele unghiulare realizate de aceste 3 tipuri de mecanisme sunt apropiate ca amplitudine, spre exemplu, în cazul în care se consideră un raport de transmitere al angrenajului planetar i0= -1, mecanismul triunghiular cu bare articulate și roți dințate realizează o cursă unghiulară de maxum 325°, mecanismul 3RT realizează o cursă unghiulară de maxim 340°, iar mecanismul patrulater poate realiza și 360°;
3. Mecanismele cu bare articulate și roți dințate pot fii utilizate ca aplicație practică în orientarea azimutală a sistemelor fotovoltaice datorită curselor unghiulare superioare pe care le pot realiza conducând la o eficiență de tracking ridicată (94.42% în cazul mecanismului triunghiular, 96.43% în cazul mecanismului 3RT și 96.42% mecanismul patrulater).
Principalele contribuții aduse sunt: a. Identificarea tipului de cuple ce pot apărea între corpurile mecanismelor cu bare articulate și
roți dințate; b. Identificarea numărului de corpuri și scrierea ecuațiilor de restricții geometrice și cinematice
pentru 4 exemple reprezentative de mecanisme cu bare articulate și roți dințate; c. Identificarea punctelor de interes (geometria corpurilor) pentru fiecare corp component a 4
tipuri de mecanisme cu bare articulate și roți dințate; d. Sinteza geometrică a 3 tipuri de mecanisme cu bare articulate și roți dințate (mecanismul de
tip romb fiind caz particular al mecanismului de tip patrulater); e. Simularea răspunsului energetic pentru un sistem PV acționat azimutal prin intermediul a 3
tipuri de mecanisme cu bare articulate și roți dințate; f. Realizarea schemei bloc de dimensionare geometrică a 3 tipuri de mecanisme cu bare
articulate și roți dințate.
Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
5. Proiectarea și implementarea unui demonstrator PV de tip azimutal cu mecanism triunghiular cu bare articulate și roți dințate
În acest capitol este realizată sinteza dimensională a variantei optime de mecanism cu bare articulate și roți dințate, stabilită dintre cele trei mecanisme analizate în capitolul anterior, în vederea realizării fizice și implementării acestuia pentru realizarea cursei azimutale a unui sistem fotovoltaic existent. 5.1. Stabilirea variantei optime de mecanism de orientare
În realizarea demonstratorului PV s-a pornit de la o listă minimală de cerințe pentru mecanismul de acționare a mișcării azimutale: a) Cursa unghiulară azimutală: -100°...+100°; b) Unghiul de transmitere γm să fie mai mare decât valoarea minim admisă γm .ad.= 30°; c) Acționarea mecanismului se realizează cu un actuator liniar electric; d) Funcționează la viteze ale vântului de până la15m/s și rezistă la viteze ale vântului de max. 30m/s.
Datorită faptului că toate cele trei mecanisme răspund acestor cerinţe (v. cap. 4), varianta optimă de mecanism se stabileşte prin evaluare tehnico-economică pe baza următoarelor criterii: 1) grad de complexitate redus; 2) costuri minime; 3) utilizarea a cât mai multor componente tipizate; 4) să nu necesite materiale și/sau tehnologii speciale; 5) întreținere ușoară.
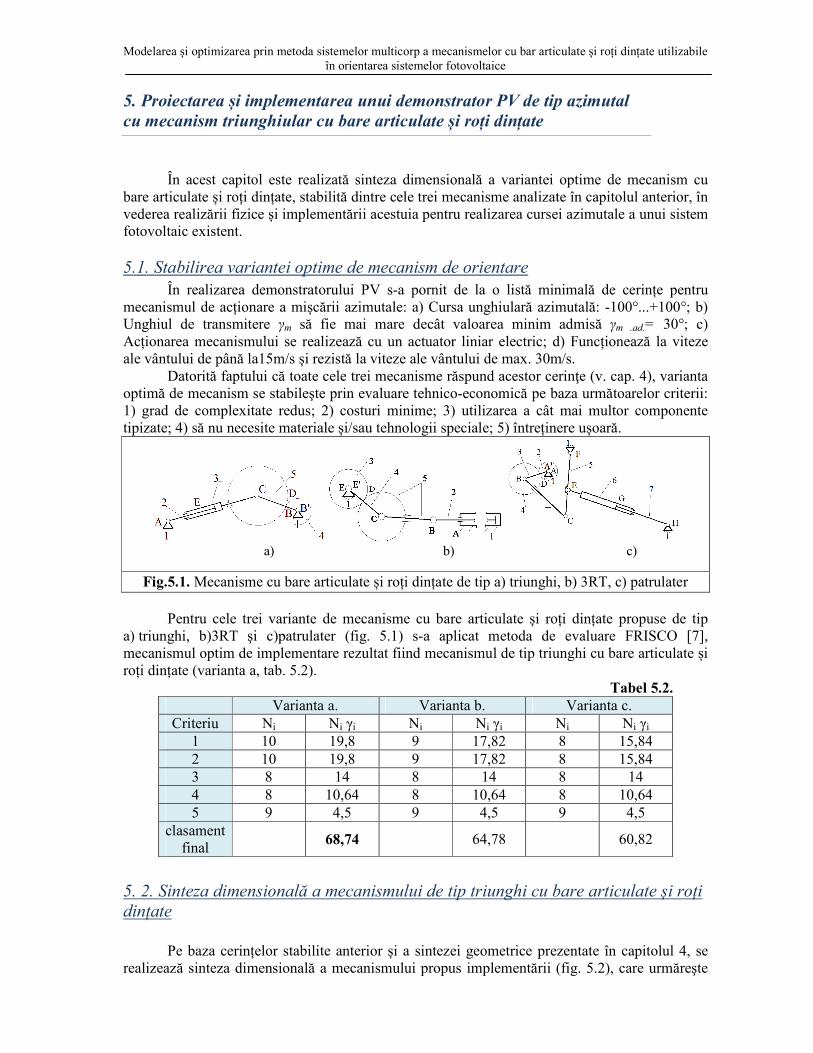
a) b) c)
Fig.5.1. Mecanisme cu bare articulate și roți dințate de tip a) triunghi, b) 3RT, c) patrulater Pentru cele trei variante de mecanisme cu bare articulate și roți dințate propuse de tip
a) triunghi, b)3RT şi c)patrulater (fig. 5.1) s-a aplicat metoda de evaluare FRISCO [7], mecanismul optim de implementare rezultat fiind mecanismul de tip triunghi cu bare articulate și roți dințate (varianta a, tab. 5.2).
Tabel 5.2. Varianta a. Varianta b. Varianta c.
Criteriu Ni Ni γi Ni Ni γi Ni Ni γi 1 10 19,8 9 17,82 8 15,84 2 10 19,8 9 17,82 8 15,84 3 8 14 8 14 8 14 4 8 10,64 8 10,64 8 10,64 5 9 4,5 9 4,5 9 4,5
clasament final
68,74 64,78 60,82
5. 2. Sinteza dimensională a mecanismului de tip triunghi cu bare articulate și roți dințate
Pe baza cerințelor stabilite anterior și a sintezei geometrice prezentate în capitolul 4, se
realizează sinteza dimensională a mecanismului propus implementării (fig. 5.2), care urmăreşte

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
stabilirea valorilor rapoartelor între dimensiunile mecanismului cu bare articulatel1/l2, AC1/l2=ka
și raportul de transmitere i0 pentru care se realizează un gabarit redus și unghiuri de transmitere adecvate, precum și stabilirea dimensiunile mecanismului în premisa în care actuatorul liniar are o lungime minimă AC1=560mm și realizează o cursă s =300 mm, iar raportulAC1/l2 = ka= 2,9.
Fig.5.2. Mecanism triunghiular de orientare azimutală a unui sistem fotovoltaic
Folosind dependența ∆φ4(γm, i0) (v.Fig.4.18), pentru valoarea impusă a cursei de orientare azimutală φ4=200ose determină valorile unghiului de transmitere γm, corespunzătoare unui set de valori discrete ale raportului de transmitere i0. Pentru φ4=200°şi i0= -0,6; -0,8; -1; -1,2; -1,4 se obțin următoarele valori (Fig.5.3):γm = 27,5º (i0= -0,6), γm = 34,44º (i0= -0,8), 40°(i0= -1), 44,54°(i0= -1,2), 48.33° (i0= -1,4). Se poate observa că în cazul unui raport interior de transmitere al angrenajului planetar diferențial i0= -0,6, valoarea unghiului de transmitere este mai mică decât valoarea minimă admisă (γm= 27,5º <γm.ad.=30º)şi,ca urmare, această variantă se exclude. Prin creșterea valorii absolute a raportului interiori0 se obțin pentru γm valori superioare valorii minime admisibileγm.ad = 30º (v. fig. 5.3), care conduc la soluții fezabile de mecanism. Deși varianta i0= -0,8 asigurăun gabarit radial mai redus al angrenajului planetar, pentru simplificarea procesului de manufacturare a roților dințate s-a adoptat raportul interior al angrenajului planetar i0= -1 (roți dințate identice), situaţie în care γm= 40º >γm .ad = 30º.
Cunoscând cursa actuatorului actuatoruluiliniar de 300mm și valoarea minimă a unghiului de transmitere γm=40º, din C1BC2 (fig. 5.2) se determină lungimea maximă a balansierului (2) l2=195,81 mm. Din considerente practice referitoare la cursa actuatorului inclus in mecanism, se adoptă valoarea l2=192 mm.
Folosind dependența γm(l1, l2) din fig.4.19, conform fig. 5.4. se determină valoarea
raportuluil1/l2= 3,72pentru γm = 40º și ka=2,9 și astfel se obținelungimea bazei l1 = 714,24 mm.
Fig.5.3. Determinarea valorii unghiul de transmitere γm funcție de cursa unghiulară
azimutală ∆φ4
Fig.5.4. Determinarea raportului l1/l2funcție de unghiul de transmitere γm

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
Datorită faptului că pentru realizarea roților dințate s-a ales folosirea poliamidei (material
plastic cu proprietăţi antifricţiune), din condiții de rezistență se impune folosirea unui modul al roților m=3 mm. Astfel, cunoscând d3=m⋅z3 și d3=d4=192mm, se determină numerele de dinți ale roților dințate 3 și 4 ca fiind z3=z4=64 dinți.
5.3. Proiectul constructiv al demonstratorului
Preliminar lansării comenzilor de manufacturare a componentelor mecanismului cu bare articulate şi roţi dinţate și respectiv de asamblare a demonstratorului PV, se parcurge etapa de prototipare virtuală a sistemului fizic cu ajutorul unor softuri performante specializate, în scopul validării soluţiei constructive şi a rezultatelor teoretice privind cursele unghiulare necesare și cursa actuatorului liniar utilizat.
În acest scop, modelarea 3D în softul SolidWorks a sistemului PV (fig. 5.5, 5.6 şi 5.7) a avut ca date de intrare schema cinematică a mecanismului de orientare azimutală cu bare articulate și roți dințate (fig. 5.1.) și valorile optime ale geometriei mecanismului prezentate în subcapitolul 5.1, precum și modulul PV și actuatorul liniar cu datele tehnice date de producătorii acestor produse. Exceptând elementele de asamblare și fixare aferente, principale părți componente ale sistemului fotovoltaic sunt (fig. 5.6):
1. Modul PV și cadrul în care acesta este montat;
2. Placa de bază; 3. Mecanismul triunghiular pentru realizarea
mișcării azimutale; 4. Suportul de articulare la bază al actuatorului
liniar;
5. Partea fixă a stâlpului azimut al
sistemului PV; 5’. Partea mobilă a stâlpului azimut al sistemului PV 6. Actuatorul liniar pentru realizarea
mișcării altitudinale.
a) b)
Fig.5.6.Principalele componente ale modelului CAD În figura 5.7. este detaliat mecanismul de orientare azimutală de tip triunghi cu bare articulate și roți dințate modelat în SolidWorks, mecanism format din baza 1, balansierul 2, roțile dințate 3 și 4, cilindrul interior mobil 3 al actuatorului liniar, solidar cu roata dințată 3, și carcasa fixă 5 a actuatorului liniar. De asemenea, mecanismul a fost prevăzut cu un sistem de reglare a jocului din angrenaj (fig. 5.7,d şi e)
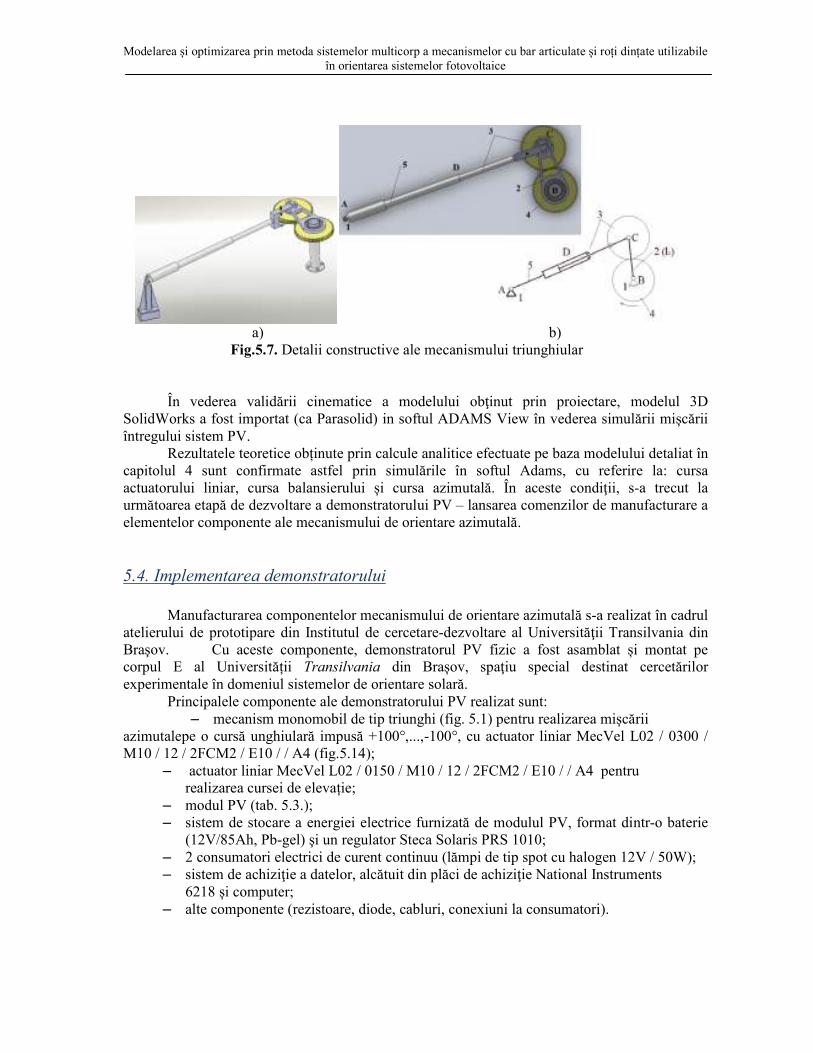
Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
a) b)
Fig.5.7. Detalii constructive ale mecanismului triunghiular În vederea validării cinematice a modelului obţinut prin proiectare, modelul 3D
SolidWorks a fost importat (ca Parasolid) in softul ADAMS View în vederea simulării mișcării întregului sistem PV.
Rezultatele teoretice obținute prin calcule analitice efectuate pe baza modelului detaliat în capitolul 4 sunt confirmate astfel prin simulările în softul Adams, cu referire la: cursa actuatorului liniar, cursa balansierului și cursa azimutală. În aceste condiţii, s-a trecut la următoarea etapă de dezvoltare a demonstratorului PV – lansarea comenzilor de manufacturare a elementelor componente ale mecanismului de orientare azimutală.
5.4. Implementarea demonstratorului Manufacturarea componentelor mecanismului de orientare azimutală s-a realizat în cadrul atelierului de prototipare din Institutul de cercetare-dezvoltare al Universităţii Transilvania din Braşov. Cu aceste componente, demonstratorul PV fizic a fost asamblat și montat pe corpul E al Universității Transilvania din Brașov, spaţiu special destinat cercetărilor experimentale în domeniul sistemelor de orientare solară. Principalele componente ale demonstratorului PV realizat sunt:
– mecanism monomobil de tip triunghi (fig. 5.1) pentru realizarea mișcării azimutalepe o cursă unghiulară impusă +100°,...,-100°, cu actuator liniar MecVel L02 / 0300 / M10 / 12 / 2FCM2 / E10 / / A4 (fig.5.14);
– actuator liniar MecVel L02 / 0150 / M10 / 12 / 2FCM2 / E10 / / A4 pentru realizarea cursei de elevație;
– modul PV (tab. 5.3.); – sistem de stocare a energiei electrice furnizată de modulul PV, format dintr-o baterie
(12V/85Ah, Pb-gel) şi un regulator Steca Solaris PRS 1010; – 2 consumatori electrici de curent continuu (lămpi de tip spot cu halogen 12V / 50W); – sistem de achiziţie a datelor, alcătuit din plăci de achiziţie National Instruments
6218 și computer; – alte componente (rezistoare, diode, cabluri, conexiuni la consumatori).

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
Fig.5.13. Demonstratorul PV
5.5. Monitorizarea parametrilor meteo şi ai demonstratorului PV Descrierea eficienței de orientare a demonstratorului PV impune monitorizarea prealabilă a unor mărimi de intrare și ieșire. Parametrii de intrare necesari sunt înregistrați de stația meteo Delta-T de pe corpul E al Universității Transilvania din Brașov şi se referă la radiația solară globală (GH) și difuză (DH) în plan orizontal, iar unghiurile optime de orientare date de programul de orientare (vezi. cap 6) sunt monitorizate prin intermediul encoder-ului actuatorului liniar de către controller-ul Ni cRIO-9012. Parametrii de ieșire monitorizaţi sunt tensiunea de la bornele acumulatorului electric și intensitatea curentului electric generat (puterea electrică instantanee produsă de modulul fotovoltaic), parametri care sunt afișați și prelucrați prin intermediul unui computer cu ajutorul unei aplicații LabView. Placa de achiziție a datelor (NI 6218) permite înregistrarea de tensiuni doar în domeniul -10V...+10V, motiv pentru care a fost necesară utilizarea unui circuit integrat care să asigure armonizarea din tensiunea generată şi cea măsurată. Energia electrică produsă de modulul fotovoltaic şi stocată în acumulator este consumată de două lămpi de tip spot cu halogen 12V / 50W. O schemă simplificată de monitorizare a parametrilor de intrare și de ieșire este cea prezentată în figura 5.16.în care acumulatorul şi becurile reprezintă consumatorii energiei electrice generate de modulul PV.
Fig.5.16. Schema de monitorizare a demonstratorului

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
43
5.6. Concluzii și contribuții
În acest capitol au fost prezentate principale etape ale procesului de proiectare, prototipare virtuală, manufacturare şi implementare a unui demonstrator PV fizic de tip azimutal destinat validării experimentale a modelelor teoretice elaborate în această lucrare, din care s-au decelat următoarele concluzii principale:
1. Considerând trei variante conceptuale de mecanisme cu bare articulate și roți dințate prin metoda analizei multicriteriale pe baza unui set de criterii, a rezultat ca variantă optimă în vederea implementării mecanismul de tip triunghi. Acest tip de mecanism asigură cel mai redus grad de complexitate constructivăși tehnologicăși, implicit, cele mai reduse costuri
2. Sinteza dimensională pe baza relațiilor analitice deduse în capitolul 4 conduce la studiul influenței raportului interior al angrenajului planetar diferențial și al raportului lungimilor amortizorului și balansierului asupra cursei azimutale și a raportului lungimilor bază/ balansier funcție de unghiul de transmitere γm. Conform diagramelor, creșterea valorii absolute a raportului interior al angrenajului conduce la creșterea cursei azimutale, iar creșterea raportului dintre lungimeaamortizorului și a balansierului (ka) duce la creșterea raportului lungime bază/lungime balansier și ca urmare la creșterea gabaritului mecanismului. Astfel, pentru i0=-1 și φ4=200°rezultă γm=40°, ka=2,9, l1/l2=3,72;
3. Simularea dezvoltată cu ajutorul AdamsView și în conformitate cu proiectul 3D dezvoltat în SolidWorks a permis validarea mărimilor teoretice obținute prin sinteza dimensională: cursa azimutală impusă de 200°, cursa actuatorului liniar de 300mm, cursa balansierului de 100°, valorile unghiului de transmitere peste valoarea minimă de 30° impusă (se obține γm=40°).
Principalele contribuții sunt:
1. Formularea cerințelor și criteriilor şi identificarea variantei optime de mecanism cu bare articulate și roți dințatepentru implementare în demonstratorul PV;
2. Efectuarea sintezei dimensionale a mecanismului de tip triunghi cu bare articulate și roți dințate propus pentru implementare;
3. Designul constructiv și prototiparea virtuală a sistemului PV cu orientare azimutală realizată cu un mecanism de tip triunghi cu bare articulate și roți dințate folosind softul SolidWorks pentru modelare și ADAMS pentru simularea cinematică;
4. Elaborarea proiectului de detaliu a sistemului mecanic și a sistemului de monitorizare și măsurare a parametrilor de ieșire (intensitate și tensiune curent)
5. ,Manufacturarea, asamblarea, testarea și implementarea demonstratorului pe terasa clădirii corpului E de pe Colina Universității.

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
44
6. Testarea experimentală a demonstratorului PV de tip azimutal cu mecanism cu bare articulate și roți dințate
Cercetarea experimentală prezentată în acest capitol are ca obiectiv principal evidențierea
performanţelor superioare, privind eficienţa de captare a energiei solare şi aportul efectiv de energie electrică generată, ale sistemelor PV cu unghiuri mari de orientare comparativ cu sistemele PV cu orientare fixă sau pe curse diurne reduse. În acest sens, demonstratorul PV de tip azimutal cu mecanism de tip triunghiular cu bare articulate și roți dințate este testat exprimental pentru o cursă unghiulară diurnă de 200º, rezultatele energetice obţinute fiind analizate comparativ cu cele furnizate de același sistem PV cu o cursă unghiulară de 100º (corespunzătoare absenței roților dințate, cu menţinerea valorii minime a unghiului de transmitere) și același sistem PV menținut în poziție fixă.
În realizarea planului de cercetare experimentală s-au considerat următoarele aspecte: 1. Pentru a asigura validitatea comparaţiei, demonstratorul PV funcţionează cu un unghi de
elevaţie constant. Valoarea optimă a unghiului de elevație = 55° a fost stabilită având în vedere locaţia de testare (Braşov) în condiţiile considerării unui singur sezon anual.
2. Programul de orientare în paşi a demonstratorul PV corespunde zilei echivalente a sezonului anual (N=115, ziua de 25 aprilie); astfel, programul implementat este valabil pe întreaga durată a unui an calendaristic. Orientarea se realizează în paşi cu durata de 1 oră.
3. Pentru a surprinde relevanţa orientării, testarea s-a realizat într-o zi în care radiaţia directă este preponderentă (ipoteza cer senin); un profil corespunzătoar al radiaţiei solare a fost identificat pentru ziua de 5 august 2012 (fig. 6.2.)
4. Performanța unui sistem PV este caracterizată prin următoarelor mărimi: - radiația globală (directă şi difuză) captată de suprafața fotovoltaică; - energia electrică generată; - eficiența sistemului de captare a radiaţiei solare (calculată cu ajutorul relației 4.110) şi
eficienţa globală a sistemului PV. 5. Datele experimentale necesare stabilirii performanței unui sistem PV sunt:
- radiația globală și radiația difuză în plan orizontal (GH și DH), furnizate de stația meteo Delta-T a Centrului de cercetare „Sisteme de energii regenerabile şi reciclare”, amplasată pe corpul E al Universităţii Transilvania din Braşov, în vecinătatea locului de implementare a demonstratorului PV.
- puterea electrică generată de modulul PV, măsurată cu ajutorul placii de achiziție National Instruments 6218 (cap. 5, fig. 5.16 şi 5.19).
6. Se neglijează energia electrică consumată de actuator în timpul deplasării în paşi a demonstratorului PV la stabilirea eficienței globale a acestuia.
Orientarea sistemului PV cu tracking se efectuează printr-un program de orientare în pași, folosind datele din tabelul 6.1, stabilite prin calcul pe baza relațiilor din [75], cu următoarele semnificaţii: numărul zilei din an pentru care s-a realizat programul (N=115 corespunzător zilei de 25 aprilie); unghiului de declinație al razei solare (δ); latitudinea locului de implementare a demonstratorului (φ=45,5 pentru Brașov); timpul solar (Ts); unghiul orar (ω) - unghiul altitudinal (α) al razei solare; unghiul azimutal (ψ); unghiul de elevație a panoului fotovoltaic (α*); unghiul azimutal al panoului fotovoltaic pentru un program de orientare în pași cu durata de o oră (ψ*); radiația solară directă disponibilă (B), stabilită pe direcţia razei solare (B = Bmax); unghiul de incidență (ν); radiația solară directă captată de suprafața fotovoltaică receptoare (B*).
Un extras din tabelul 6.1. este prezentat în tabelul 6.2.

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
45
Tabel 6.2.
Timp solar Ts
poziția modul
PV cursă actuator
nr. impulsuri
N=115
[°] [mm] 5,5 100 294,161066 379,53071 6,5 89 281,979844 1171,31014 7,5 78 269,149157 2005,3048 8,5 64 251,926667 3124,76665 9,5 48 231,096969 4478,69702 10,5 26 200,639449 6458,43582 11,5 0 162,285413 8951,44816 12,5 -26 121,844988 11580,0758 13,5 -48 86,3812049 13885,2217 14,5 -64 60,0708346 15595,3958 15,5 -78 36,804769 17107,69 16,5 -89 18,4236014 18302,4659 17,5 -100 0 19500
Figura 6.3 prezintă variațiile radiației globale în plan orizontal (GH) înregistrate în ziua
de 05.08.2012, precum și componentele directă (BH) și difuză ale acesteia (DH). Se observă valoarea relativ redusă a radiației difuze în comparație cu radiația globală, caracteristic zilelor cu cer senin.
Fig.6.3. Variații în plan orizontal ale radiației solare globale (GH), ale radiației solare directe (BH) și ale radiației solare difuze (DH) pentru
ziua de 05.08.2012
În figura 6.4 sunt prezentate variații comparative ale radiației solare directe după direcţia razei solare (B) și ale radiației solare receptate de suprafața fotovoltaică a sistemului PV: a) în poziție fixă (B*fix), b) cu orientare pe cursa -50°...+50° (B*tracking100°), c) cu orientare pe cursa -100°...+100° (B*tracking200°).
Se poate observa din variațiile prezentate în figura 6.4.a că sistemul PV fix reușește să capteze aproape integral radiația solară disponibilă la ora 12 (timp solar), în perioadele de dimineață și după-amiază cantitatea de radiație captată din totalul disponibil fiind mai redusă.. Pe perioada dimineții și după-amiezii se observă, faţă de cazul sistemului PV fix, o creștere a eficienței de captare a sistemului PV cu tracking pe cursa -50°...+50° (fig. 6.4,b) și o creştere suplimentară pentru cazul orientării pe cursa -100°...+100° (fig. 6.4,c). Radiaţiile solare captate în cele trei situaţii sunt reprezentate comparativ în fig. 6.4,d.

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
46
a) b)
c) d)
Fig.6.4. Variații ale radiației solare directe disponibile (B) și captate de panoul PV menținut fix (B*fix), cu tracking pe cursa -50°...+50° (B*tracking100°), cu tracking pe cursa -100°...+100°(
B*tracking200°) În figura 6.6. sunt prezentate variații comparative ale radiației solare globale disponibile (G=B+ D) și ale radiației solare globale captată de suprafața fotovoltaică a sistemului PV în poziție fixă (G*fix), cu orientare pe cursa -50°...+50° (G*tracking100°), cu orientare pe cursa -100°...+100° (G*tracking200°). Ca și în cazul radiaţiei solare directe (preponderentă în structura radiaţiei globale), comparativ cu sistemul PV fix, se observă că sistemul PV cu tracking receptează o cantitate semnificativ mai mare din radiația solară globală în perioada dimineții și după-amiezii (trackingul realizat de mecanismul cu bare articulate și roți dințate având un raport de captare mai bun decât trackingul realizat pe cursa -50°...+50°).
a) b)
c) d)
Fig.6.6. Variații ale radiației solare globale disponibile (G = B + D) și captate de panoul PV menținut fix (G*fix), cu tracking pe cursa -50°...+50°( G*tracking100°), cu tracking pe cursa
-100°...+100°( G*tracking200°)

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
47
Utilizând sistemul de orientare cu mecanism cu bare articulate și roți dințate pe cursa -100°...+100° se captează o cantitate de energie solară egală cu 10,38 kWh/m2 din totalul de 11,00 kWh/m2 disponibil în ziua reprezentativă de 05.august 2012. Se observă astfel un aport de captare al acestui mecanism de aproximativ 6% comparând cu mecanismul de tracking ce funcționează pe cursa unghiulară de -50°...+50°. Sistemul PV menținut fix captează din totalul de 11,00 kWh/m2 aproximativ 7,720 kWh/m2. Astfel, sistemul ce realizează cursa -100°...+100° captează cu până la 35% mai multă radiație solară comparativ cu sistemul fix. În fig. 6.7 se prezintă comparativ eficiența instantanee de captare G = G*/G·100 [%] a demonstratorului în cele trei situații de funcționare. Se poate observa o eficiență superioară (>90%) pe aproape întreg parcursul zilei (aprox. între 7:30 şi 17:00) a sistemului PV cu tracking pe cursa 100°...+100° datorează aportului energetic adus de tracking în perioada dimineții și a după-amiezii; comparativ, sistemul PV fix înclinat realizează această eficiență de captare superioară (de peste 90%) doar în intervalul orar 10:00-14:00. Eficienţa de captare a sistemului PV cu tracking pe cursa 50°...+50° se încadrează între cele anterioare, asigurând o eficienţă mai mare de 90% în intervalul aprox. 8:00-16:00.
Puterea electrică a demonstratorului în cele trei situații de funcționare este prezentată în figura 6.8. Pe perioada dimineții și după-amiezii se poate observa că se obţin valori mai mari ale puterii electrice în situaţia cu tracking, fiind captată o cantitate superioară de energie solară transformată în energie electrică. De asemenea, se remarcă o uşoară creştere a puterii electrice generată de demonstrator în poziție fixă în proximitatea Ts=12, fenomen explicat prin scăderea eficienței de conversie a modului PV datorită încălzirii superioare a acestuia pentru sistemele cu tracking (care convertesc în acelaşi timp o cantitate mai mare de energie solară).
Fig.6.7. Eficiența instantanee de captare pentru sistemul PV menținut fix(G/G*fix), cu
tracking pe cursa -50°...+50°( G/G *tracking100°), cu tracking pe cursa -
100°...+100°( G/G *tracking200°)
Fig.6.8. Puterea electrică a sistemului PV menținut fix (P fix), cu tracking pe cursa -50°...+50°(P tracking100°), cu tracking pe
cursa -100°...+100°(P tracking200°)
Energia electrică produsă de sistemul PV cu mecanism de orientare pe cursa -
100°...+100° este de aproximativ 670 W/m2 comparativ cu 631 W/m2 obținut de la sistemul de oreintare pe cursa -50°...+50° și 556 W/m2 de la sistemul PV fix.
Concluzii și contribuții Principalele concluzii ce pot fi desprinse din acest capitol al tezei de doctorat, în urma
derulării programului de cercetare experimentală, sunt: 1. Din totalul disponibil de radiație solară de 11 kWh/m2 pentru ziua 05.08.2012. sistemul
PV cu mecanism cu bare articulate și roți dințate captează 10,38 kWh/m2;

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
48
2. Comparativ cu un sistem PV fix înclinat și cu un sistem PV la care orientarea se realizează pe o cursă restrânsă, sistemul PV orientat azimutal cu mecanism cu bare articulate și roți dințate pe cursa -100°...+100° are o eficiență de captare de 37% respectiv de 6%;
3. Comparativ cu sistemele solare fixe sau cu orientare pe curse diurne reduse, sistemele de orientare solară cu bare articulate şi roţi dinţate pot fi utilizate eficient în următoarele situaţii:
- implementarea în zonele cu radiaţie solară ridicată în vederea captării unei cantităţi sporită de energie solară şi implicit de livrare a unei cantităţi corespunzătoare de energie electric/termică în perioadele de proximitate a răsăritului şi respectiv a apusului de soare.
- pentru orientarea cu precizie ridicată a sistemelor solare concentratoare (de tip fotovoltaic şi/sau termic), prin utilizarea angrenajului planetar ca mecanism amplificator a deplasării unghiulare.
Principalele contribuții:
a. Calculul parametrilor necesari conceperii programului de orientare (numărul zilei din an, unghiul de declinație al axei Pământului, latitudinea locului de implementare, timpul solar, unghiul orar, unghiul altitudinal, unghiul azimutal, unghiul de elevație a panoului fotovoltaic, unghiul azimutal al panoului fotovoltaic, radiația solară directă disponibilă, unghiul de incidență, radiația solară directă ce ajunge la suprafața fotovoltaică)
b. Stabilirea programului optim de orientare în pași pentru demonstrator ul PV orientat cu ajutorul unui mecanism cu bare articulate și roți dințate de tip triunghi;
c. Sistematizarea și prelucrarea datelor experimentate necesare comparării performanțelor energetice ale unui sistem PV fix înclinat și ale unui sistem PV cu sistem de orientare azimutal cu mecanism triunghiular cu bare articulate și roți dințate;
d. Analiza comparativă a eficiențelor energetice ale celor trei sisteme PV considerate: fix înclinat, orientat cu mecanism triunghiular cu bare articulate pe cursa azimutală de 100° și orientat cu mecanism triunghiular cu bare articulate roți dințate pe cursa azimutală de 200°;
e. Formularea de concluzii calitative și cantitative privind eficiența sistemului de orientare studiat comparativ cu cele existente.

Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
49
7. Concluzii finale, contribuții originale, valorificarea rezultatelor și direcții ulterioare de cercetare
7.1. Concluzii finale și contribuții originale
Cercetarea efectuată și rezultatele obținute au permis formularea următoarelor concluzii și contribuții aduse în domeniu:
Concluzii finale
1. În literatura de specialitate există o multitudine de sisteme de orientare azimutale a
platformelor PV pentru creșterea eficienței de conversie a radiației solare în energie electrică prin maximizarea cantității de radiație pe suprafața fotovoltaică;
2. De regulă, la aceste platforme mișcarea sezonieră este realizată prin actuatoare liniare (pentru un domeniu unghiular sub 90°), iar mișcarea diurnă prin transmisii cu roți dințate de tip moto-reductor cilindric sau melcat sau prin lanț (pentru un domeniu unghiular de peste 180°);
3. Reducerea complexității sistemelor de orientare pentru mișcarea diurnă, concomitent cu reducerea prețului de cost al sistemului și a cheltuielilor legate de mentenanță, impune utilizarea de noi mecanisme de orientare pentru mișcarea diurnă;
4. Prin prezenta teză, având în vedere cerințele privind cursa unghiulară azimutală, reducerea complexității și a costului produsului, se propun și se studiază mecanisme cu bare articulate și roți dințate ca alternativă la sistemele aplicate până în prezent;
5. Prin proiectare optimă, aceste mecanisme asigură atât cursa unghiulară azimutală necesară, precum și menținerea unghiului de presiune sub valori limită admise pentru o eficiență bună a sistemului de orientare;
6. În modelarea mecanismelor cu bare articulate și roți dințate se folosește metoda sistemelor multicorp care creează bazele conceperii și prototipării virtuale a sistemului de orientare prin utilizarea de softuri comerciale. Se înlătură astfel dezavantajul metodelor actuale de modelare prin diferite metode a mecanismelor cu bare articulate respectiv a celor cu roți dințate;
7. Prin aplicarea metodei sistemelor multicorp în conceperea mecanismelor cu bare articulate și roți dințate, se obține o importantă bază de astfel de mecanisme din care pot fi cu ușurință selectate acele mecanisme care corespund unui anumit tip de aplicație;
8. Din analiza multicriterială a trei variante diferite de mecanisme cu bare articulate și roți dințate (mecanismul de tip triunghi, mecanismul de tip 3RT, mecanismul de tip patrulater), se constată că varianta de”mecanism de tip triunghi” îndeplinește optim criteriile impuse referitoare la: aspect de complexitate redus, costuri minime, utilizarea de componente tipizate, materiale și tehnologii clasice, întreținere ușoară;
9. Sinteza dimensională bazată pe relațiile analitice și nomogramele dezvoltate în cadrul tezei conduce la parametrii optimi ai mecanismului: raportul interior al angrenajului i0=-1; unghiul azimutal 200°; unghiul de presiune maxim 50°, rapoartele geometrice °, ka=2,9 și l1/l2=3,72;
10. Prin modelare CAD (folosind softul SolidWorks) li simularea funcționării (folosind softul ADAMS) se validează mărimile teoretice obținute în sinteza dimensională;
Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
50
11. Eficiența de orientare privind cantitatea de radiație solară captată de suprafața fotovoltaică, la solstițiul de vară în zona Brașov, este de 94,42%, la cursa unghiulară de 200°;
12. Mecanismele de tip 3RT și patrulater realizează eficiențe de captare superioare (96,43% respectiv 96,42%) la aceeași cursă azimutală, dar au un grad de complexitate și cost mai ridicate;
13. Prototipul fizic al sistemului de orientare cu mecanism de tip triunghi testat pe baza metodologiei descrise în lucarre, confirmă modelările teoretice și rezultatele sintezei geometrice a mecanismului de orientare și conduce la concluzia unei creșteri a eficienței energetice, pentru perioada de testare, de 37% față de sistemul fără orientare și 6% față de sistemele de orientare prin mecanisme articulate (fără roți dințate);
14. Baza de mecanisme cu bare articulate și roți dințate creată prin această teză permite extinderea studiului și pentru alte tipuri de mecanisme în vederea identificării de noi soluții de mecanisme de orientare pentru diverse situații de potențial energetic al zonelor de implementare.
Contribuții originale
a. Analiza diversității sistemelor de orientare azimutală a platformelor fotovoltaice și
identificarea dezavantajelor sistemelor actuale; b. Propunerea și studiul mecanismelor cu bare articulate și roți dințate pentru mișcarea
azimutală a platformelor fotovoltaice în scopul înlăturării dezavantajelor sistemelor de orientare existente;
c. Introducerea metodei sistemelor multicorp ca metodă unitară de studiu al mecanismelor cu bare articulate și roți dințate;
d. Dezvoltarea de algoritmi pentru analiza și conceperea mecanismelor cu bare articulate și roți dințate prin metoda sistemelor multicorp;
e. Analiza prin metoda sistemelor multicorp a unor variante (patru tipuri) de mecanisme cu bare articulate și roți dințate;
f. Dezvoltarea unei baze de date de mecanisme plane cu bare articulate și roți dințate pentru mobilitate M=1 și număr de corpuri nc=3, 4, 5;
g. Dezvoltarea metodei de analiză cinematică pentru mecanismele cu bare articulate și roți dințate ținând seama de tipurile de restricții geometrice și cinematice din aceste mecanisme și aplicarea metodei pentru patru mecanisme reprezentative: de tip triunghi, de tip 3RT, de tip patrulater, de tip romboid;
h. Deducerea de relații analitice și dezvoltarea de nomograme pentru sinteza geometrică a mecanismelor cu bare articulate și roți dințate de tip triunghi, de tip 3RT și de tip patrulater;
i. Analiza eficienței parametrilor geometrici asupra unghiului maxim de orientare pentru mecanismele de tip triunghi, 3RT și patrulater și analiza comparativă a celor trei tipuri de mecanisme;
j. Simularea răspunsului energetic al sistemului fotovoltaic acționat azimutal prin mecanisme de orientare de tip triunghi, 3RT și respectiv patrulater și analiza comparativă a eficienței captării radiației solare pentru cele trei tipuri de mecanisme;
k. Analiza multicriterială, pe baza unor criterii propuse în teză, a celor trei mecanisme de orientare de tip triunghi, 3RT și patrulater și stabilirea variantei optime de mecanism de orientare – mecanismul de tip triunghi;
l. Proiectarea geometrică optimă folosind nomogramele din lucrare și alcătuirea prototipului virtual al sistemului folosind softuri adecvate (SolidWorks, ADAMS);
Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
51
m. Dezvoltarea proiectului sistemului de orientare, execuția mecanismului de orientare și implementarea unui demonstrator fotovoltaic de tip azimutal cu mecanism de orientare cu bare articulate și roți dințate, precum și conceperea schemei de monitorizare a demonstratorului;
n. Testarea experimentală a demonstratorului pe baza unei metodologii prezentate în teză și prezentarea de rezultate pentru unghiurile razei solare și ale suprafeței fotovoltaice , ale radiației solare și a componenetelor acesteia, radiație solară disponibilă și captată, ale eficienței de captare și puterea electrică în situații funcționale diferite (suprafață PV fixă, suprafață PV orientată cu diverse unghiuri de orientare);
o. Formularea de concluzii calitative și cantitative privind eficiența sistemului de orientare studiat comparativ cu ceel existente.
7.2. Valorificarea rezultatelor Cercetările efectuate în cadrul prezentei teze de doctorat au fost valorificate prin:
� Publicarea a 8 articole științifice (1 ISI ca prim autor inclus in ISI/SCI Web of Science and Web of Knowledge, 2 articole recunoscute CNCSIS, clasa B/B+ și 5 lucrări științifice publicate în volumele conferinţelor organizate de societăţi profesionale internaţionale)
� Depunerea în calitate de co-autor a 3 cereri de brevet: - Brevet de invenţie: Tracking system (rhombus), A/00676/29.07.2010; - Cerere brevet de invenţie: Mecanism de orientare articulat cu roti dintate,
A/01074/08.11.2010; - Cerere brevet de invenţie: Cerere brevet de invenţie: Mecanism de orientare cu
bare articulate si angrenaj planetar, A/10391/01.06.2012. � Participarea la 2 conferințe internaționale:
- European Photovoltaic Solar Energy Conference and Exhibition, EUPVSEC2011, Hamburg, Germania;
- The 3rd International Conference on Sustainable Energy, CSE 2011, Brașov, România.
� Participarea la o școală de vară: - RESchool 2010 Erasmus Cerrificate RES 2010, Erasmus Intensive Program on
Small Renewable Energy Sources and Energy Saving, Natural Resouces & Environment Department of the Technological Institute of Crete (în Chania și Heraklion).
7.3. Direcții ulterioare de cercetare
Cercetarea efectuată prin introducerea de noi mecanisme de orientare azimutală a platformelor fotovoltaice și modelarea acestor mecanisme prin metoda sistemelor multicorp precum și rezultatele obținute în creșterea eficienței energetice, conduc la necesitatea continuării studiului pentru:
- adoptarea de noi variante de mecanisme cu bare articulate și roți dințate din baza de date
descrisă în lucrare și chiar extinderea bazei de date privind aceste mecanisme; - extinderea cercetărilor experimentale pentru perioade mai lungi de timp, prin modificarea
eventual și a unghiului de elevație al suprafeței fotovoltaice, în condiții diferite de claritate a atmosferei.
Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
52
Bibliografie selectivă
[7] Bobancu, Ș., Cioc, V.: Inovare inginerească în design, editura Informaket, Brașov, 2002;
[9] Boyle, G, Everett, R. and Ramage, J., 2003: Energy Systems and Sustainability, Oxford University Press/The Open University, ISBN 0-19-926179-2;
[11] Burduhos B., Diaconescu D., VătăşescuM. M. et.al., 2011:Energy Comparison of PV Systems with Mono- and Bi-axial Pseudo-equatorial Tracking Mechanisms, în The 13th World Congress în Mechanism and Machine Science, Universidad de Guanajuato (UCEA), México, June 19 -23 2011;
[14]Butuc, B., Moldovean, G., Creangă N.: Theorethical efficiency of a gear based azimuthal tracked photovoltaic platform, în on-line jurnal: RE&PQJ-8 (Renewable Energy and Power Quality Journal, No.9, May 2011), lucrarea nr. 393, ISSN: 2172-038X (on-line journal); ISBN: 978-84-613-7543-1 (CD proceedings);
[17]Creangă N., Diaconescu D., Vişa I.: Geared linkage with large angular stroke used in tracked PV systems, Bulletin of the Transilvania University of Brasov, Romania, 2006, Vol. 3(52), 2010; [18]Creangă N., Vişa I., Diaconescu D., Hermenean, I., Butuc, B.:Geared linkage driven by linear actuador used for PV platform azimuth orientation, RE&PQJ-8 (Renewable Energy and Power Quality Journal, No.9, May 2011), lucrarea nr. 456, ISSN: 2172-038X (on-line journal); ISBN: 978-84-613-7543-1 (CD proceedings);
[19] Creangă N., Vişa I., Diaconescu D., Hermenean, I.: A Geared 3RT Linkage Used For the Azimuth Orientation of a PV Platform, 26th EU PVSEC - 26th European Photovoltaic Solar Energy Conference and Exhibition, Hamburg, Germany, 5 – 9 September, 2011;
[20]Creangă N., Diaconescu D., Hermenean, I.: 4-bar geared linkage used for photovoltaic azimuth orientation, 2011, Environmental Engineering and Management Journal, Vol. 10 (8);
[33] Hermenean I., Vişa I., Diaconescu D., Creangă N.: Kinematic Synthesis of a 3RP Linkage for the Optimal Orientation of a Photovoltaic Platform, IFToMM World Congress 2011 Proceedings, Guanajuato, Mexico;
[34]Hossein M. et.all.: A review of principle and sun-tracking methods for maximizing solar systems output, Renewable and Sustainable Energy Reviews 13 (2009), 1800-1818;
[35]Hotărârea nr.217 din 28 februarie 2007, privind aprobarea Strategiei naționale în domeniul cercetării-dezvoltării și inovării pentru perioada 2007—2013; publicată în Monitorul Oficial nr.214 din 29 martie 2007;
[42]Li, T.-J.: Kinematic analysis of geared linkage mechanisms, Mechanism and Machine Theory, 40 (2005), 1394-1413;
[43]Li, T.-J.: Kinematic synthesis of planar geared four-bar linkages with prescribed dwell characteristics, Proceedings of the 11th World Congress in Mechanism and Machine Science, August 18-21, 2003, Tianjin, China;
[44]Luque, A. L., Andreev, V. M.,2007: Concentrator Photovoltaics, Springer-Verlag, BerlinHeidelberg;
[46]Mătieş, V., Szabo F., S., Besoiu, S., „Information links, flexibility and reconfigurability of the mechatronic systems”, Proceedings of SYROM 2005, The 9th IFToMM International Symposium on Theory of Machines and Mechanisms, p.697-702, Bucureşti, România; 2005;
[47]Mătieș V., Mătieș M., Bălan R., Stan S.:Conceptual Design in Mechatronics, PRASIC, Vol. III – Design de Produs, Brasov, România, 7-8 Noiembrie 2002
[48] Meliss M., 1997:Regenerative Energie-Quellen Praktikum, Springer, Berlin;
Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
53
[49]Messenger R., Ventre J., 2003:Photovoltaic Systems Engineering, Second Edition,
CRC, ISBN 978-0849317934; [54]Neagoe M., Vătășescu M.M., Săulescu R.G., Creangă N., 2012: On new high
performance systems with linear actuators for diurnal orientation of PV platforms, Applied Mechanics and Materials Journal, Vol.162, 214-223;
[57] Olariu, N., Ispas, F., Măntescu, G., Văduva, E., Olteanu, L., Leţ, D., "Testing results of the first Romanian BIPV Application", "19th European photovoltaic's solar energy conference and exhibition", Paris, France, 2004.
[62] Popa V., 2009 (teză doctorat):Creşterea eficienţei energetice a panourilor fotovoltaice prin mecanisme de orientare de tip azimutal, Universitatea Transilvania din Braşov, România;
[75]Vătăşescu M., Vişa I., Diaconescu D., Hermenean I., Creangă N., 2010: New Solar Angles And Their Corresponding Tracking Systems Efficiency,în on-line jurnal: RE&PQJ-8 (Renewable Energy and Power Quality Journal, No.8, April 2010), lucrarea nr. 511, ISSN 2172-038X (on-line journal); ISBN: 978-84-613-7543-1 (CD proceedings).
[76]Vătășescu M., Diaconescu D.V., Duță A., Burduhos B.G., (2010): Atmospheric Pollution Evaluation In Brasov Romania Based On Turbidity Factor Analysis, Environmental Engineering and Management Journal, 10;
[78] Vișa,I. Alexandru P., Talabă D., Alexandru C., 2004: Proiectarea funcțională a mecanismelor. Metode clasice și moderne, Lux Libris, Brașov;
[79] Vişa I., Diaconescu D., et.al., 2008:PV Tracking Data Needed in the Optimal Design of the Azimuthal Tracker’s Control Program, în Proceedings OPTIM 2008 - 11th International Conference on Optimization of Electrical and Electronic Equipment, Braşov, România, ISBN: 978-973-131-030-5, p. 455-460;
[81]Vișa, I., Diaconescu D.: On the Incidence Angle Optimization of the Dual-Axis Solar Tracker. In: 11th International Research/Expert Conference TMT - Trends in the Development of Machinery and Associated Technology, Hamammet, Tunisia, 2007, p. 1111-1114; Brevete
[83] Eschenbach, P. W.: Cyclodial drive for exercise apparatus, US 6830538 B2, 2004; [85]O’Rourke, G.M.: Three point solar tracking system and method, Patent application
number: 20110209696 (27 oct 2010); [86]Stuart, J. M.: Manipulator, US 6702805 B1, 2004; [87]Vending,H. et.al.: Seasonally adjustable Mounting system for solar panels:
US2008/0040990 (21 feb 2008); [89] Vișa,I., Diaconescu D., Săulescu R., Creangă N., Hermenean I..: Mecanism de
orientare articulat cu roți dințate, A/01074/08.11.2010 [90] Vișa,I., Diaconescu D., Neagoe M., Creangă N., Săulescu R.: Mecanism de orientare
cu bare articulate și angrenaj planetar, A/10391/01.06.2012 [91] Vișa I., Duță Capră A., Diaconescu D., Săulescu R., Vătășescu Monica, Burduhos B., Țoțu
I., Creangă N.: Tracking system (rhombus), A/00676/29.07.2010
Site-uri [92]http://www.ades.tv [93]http://cordis.europa.eu/fp7/energy/home_en.html [94]http://ec.europa.eu/clima/policies/package/index_en.htm [98]http://knowledge.allianz.com [100]http://www.termice.ro/wp-content/uploads/2012/04/pompe-de-caldura-distributia-
radiatiei-solare.jpg [101]http://www.tracker.cat
Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bar articulate și roți dințate utilizabile în orientarea sistemelor fotovoltaice
54
[103]http://www.wattsun.com/ [107] http://ro.instalbiz.com/resources/124-resource-ce-sunt-celulele-solare_117.html [108]http://www.solarserver.com/solar-magazine/solar-news/current/aleo-solar-ag-to-
supply-australia-with-solar-pv-modules.html [109]http://www.buzznews.ro/2011/05/08/cartierul-tineretului-se-transforma-in-cel-mai-
mare-parc-fotovoltaic-din-tara/ [111] http://www.carexpose.com/2011/01/how-to-replace-a-window-regulator/ [112] http://letsmakerobots.com/node/25919 [117] http://www.tracker.cat [118] http://lakelandsolartrackers.com
55
Modelarea și optimizarea prin metoda sistemelor multicorp a mecanismelor cu bare articulate și
roți dințate utilizabile în orientarea sistemelor fotovoltaice
Conducător științific Doctorand Prof.univ. dr.ing. Ion VIȘA ing. Nora-Cristina CREANGĂ
REZUMAT
Cuvinte cheie: mecanism cu bare articulate și roți dințate, tracker azimutal, sisteme PV, eficiență de orientare
O cale de creștere a eficienței energetice a sistemelor fotovoltaice orientabile o constituie maximizarea cantității de radiație solară captată de suprafața fotovoltaică pe parcursul întregii zile, ceea ce implică creșterea amplitudinii unghiurilor de orientare.
Analiza critică a stadiului actual a evidențiat necesitatea înlocuirii mecanismelor articulate prin mecanisme cu bare articulate și roți dințate și utilizarea metodei sistemelor multicorp pentru studiul acestora.
Ca urmare, obiectivul central al tezei se referă la analiza, conceperea și optimizarea mecanismelor cu bare articulate și roți dințate utilizabile la orientarea suprafețelor fotovoltaice.
În conceperea acestor mecanisme prin metoda sistemelor multicorp se obțin o multitudine de variante posibile a fi utilizate.
Pentru trei variante de mecanisme se dezvoltă analiza și optimizarea geometriei, iar apoi, prin analiza multicriterială, se selectează varianta optimă, pentru care se dezvoltă modelul virtual și apoi modelul fizic.
Testarea modelului fizic al sistemului de orientare azimutală, pe baza unei metodologii adecvate, confirmă modelările teoretice și atestă creșterea eficienței energetice a sistemului de orientare adoptat.
Modelling and optimization of PV systems´ geared linkages through multibody systems method
Scientific coordinator Ph.D. Student Univ.prof. dr.eng. Ion VIȘA Eng. Nora-Cristina CREANGĂ
ABSTRACT
Keywords: geared linkage, azimuthal tracker, PV systems, orientation eficiency
One way to increase the energy efficiency of the tracked photovoltaic systems consists of maximizing the amount of solar radiation captured by the photovoltaic surface all over the daytime, which implies increasing the amplitude of the tracking angles.
A critical analysis of the state of the art outlined the need to replace the linkages mechanisms by mechanisms with gears and linkages and proved as suitablethe multibody systems method for their study.
As a result, the aim of this thesis focuses on the analysis, design and optimization of gears and linkages based mechanisms used to tracked photovoltaic surfaces.
In designing these mechanisms by using the multibody method, many functional solutions are obtained.
For three different mechanisms, the analysis and the geometry optimization weredeveloped and, based on themulticriteria analysis, the optimal mechanism is selected for further virtual modelling and fordeveloping the physical model.

56
C U R R I C U L U M V I T A E
INFORMAŢII PERSONALE Nume CREANGĂ NORA-CRISTINA
Adresă STR. EGALITĂŢII NR. 26, COD 500128, BRAŞOV
Mobil 0745-081555
E-mail [email protected]
Data naşterii 22.09.1985
STUDII ŞI CURSURI DE
SPECIALITATE 2009 -2012 Universitatea „Transilvania” Braşov – Facultatea de Inginerie Tehnologică;
Doctorand în domeniul inginerie mecanică 2009 - 2011 Universitatea „Transilvania” Braşov – Facultatea de Inginerie Tehnologică; Master
Design de produs şi mediu pentru dezvoltare durabilă 2010 Școala de vară RESchool 2010 Erasmus Cerrificate RES 2010, Erasmus Intensive
Program on Small Renewable Energy Sources and Energy Saving, Natural Resouces & Environment Department of the Technological Institute of Crete (în Chania și Heraklion)
2004 - 2009
Universitatea „Transilvania” Braşov – Facultatea de Inginerie Tehnologică, specializarea Design de Produs
Mai 2009 Participare la sesiune de comunicări stiinţifice cu lucrarea „Reducerea consumului energetic al unei maşini de spălat prin utilizarea energiei solare”
Septembrie 2007 – Iulie 2009 2007
Şcoala Populară de Arte şi Meserii Braşov, secţia Artă Fotografică Curs „AutoCAD 2007 Essentials” - Certificate of Completion Autodesk
2006 Participare la expoziţii de pictură la Copenhaga şi Budapesta Participare la Concursul Profesional Studenţesc „C.C. Teodorescu” faza Naţională la disciplina Rezistenţa Materialelor Premiu special „Prof. Emil Cernăianu” la Concursul Profesional Studenţesc „C.C. Teodorescu” faza Naţională la disciplina Rezistenţa Materialelor Participare la sesiune de comunicări stiinţifice cu lucrarea „Analiza asupra calculului plăcilor circulare cu nervuri radiale”
2005 Participare la expoziţie de pictură la Londra 2004 Atestat de Programator pe calculator ( Borland Pascal, Visual Fox Pro, Microsoft
Word) 2000 - 2003 Şcoala Populară de Arte Braşov – Secţia Grafică 2000 - 2004 Liceul Teoretic „Andrei Mureşanu” Braşov
2002 Participare la expoziţia de grafică „Cântecul Lebedei” EXPERIENŢA PROFESIONALĂ
01.08.2007 – 31.08.2007 Inginer stagiar – practică INA SCHAEFFLER S.R.L. BRAŞOV.
01.07.2006 – 31.07.2006 Inginer stagiar – practică INA SCHAEFFLER S.R.L. BRAŞOV.
2002 – PREZENT 2009 - PREZENT
Membru în Asociaţia Artiştilor Plastici Amatori – Braşov Proiect 59321 (Membru în echipa de cercetare) Studii doctorale pentru dezvoltare durabilă POSDRU/88/1.5/S/59321
2011 - PREZENT Membru AROTMM (Asociația Română pentru Teoria Mașinilor și Mecanismelor)
APTITUDINI ŞI COMPETENŢE PERSONALE
APTITUDINI ŞI COMPETENŢE TEHNICE
- programe de editare şi calcul tabelar Microsoft Office ( Word, Excel, Powerpoint )
- programe de proiectare: CATIA, AutoCad, Adams View, SolidWorks - programare: Borland Pascal, C++, Visual Fox Pro
LIMBI STRĂINE CUNOSCUTE ENGLEZĂ

57
C U R R I C U L U M
V I T A E
PERSONAL INFORMATION
Name CREANGĂ NORA-CRISTINA
Address STR. EGALITĂŢII NR. 26, COD 500128, BRAŞOV
Mobile Phone 0745-081555
E-mail [email protected]
Date of birth 22.09.1985
2009 -2012 ”Transilvania” University of Braşov – Technological Engineering Faculty; PhD student in mechanical engineering
2009 - 2011 ”Transilvania” University of Braşov – Product Design and Environmen ;Master: Sustainable Product Design
2010
RESchool 2010 Summer School – Erasmus Certificate RES 2010, Erasmus Intensive Program on Small Renewable Energy Sources and Energy Saving, Natural Resources & Environment Department of the Technological Institute of Crete (in Chania and Heraklion, Greece)
2004 - 2009
”Transilvania” University of Braşov – Technological Engineering Faculty; Product Design department
Mai 2009 Participation in scientific session with the paper „Reducerea consumului energetic al unei maşini de spălat prin utilizarea energiei solare”
September 2007 – July 2009 2007
Popular School of Arts – Photography Department „AutoCAD 2007 Essentials” Class - Certificate of Completion Autodesk
2006
Participation in painting exhibitions in Copenhagen and Budapest Special award „Prof. Emil Cernăianu” at Professional Students’ Contest „C.C. Teodorescu” National stage in Material strength Participation in scientific session with the paper „Analiza asupra calculului plăcilor circulare cu nervuri radiale”
2005 Participation in painting exhibition in London 2004 Programmer certificate (Borland Pascal, Visual Fox Pro, Microsoft Word)
2000 - 2003 Popular School of Arts – Graphic Department 2000 - 2004 Theoretical Highschool „Andrei Mureşanu” Braşov
2002 Participation at the „Cântecul Lebedei” exhibition PROFESSIONAL EXPERIENCE
01.08.2007 – 31.08.2007 Internship at INA SCHAEFFLER S.R.L. BRAŞOV.
01.07.2006 – 31.07.2006 Internship at INA SCHAEFFLER S.R.L. BRAŞOV.
2002 – PRESENT 2009 - PRESENT
Member of Asociaţia Artiştilor Plastici Amatori – Braşov Proiect 59321 (Research team member) PhD studies for sustainable developmentPOSDRU/88/1.5/S/59321
2011 - PRESENT Member of AROTMM (Asociația Română pentru Teoria Mașinilor și Mecanismelor)
PERSONAL COMPETENCES
TECHNICAL COMPETENCES
- Editing programs: Microsoft Office ( Word, Excel, Powerpoint ) - Modelling programs: CATIA, AutoCad, Adams View, SolidWorks - Programming: Borland Pascal, C++, Visual Fox Pro
FOREIGN LANGUAGES ENGLISH