Staţie Robotizată Pentru Montajul
2
8/17/2019 Staţie Robotizată Pentru Montajul http://slidepdf.com/reader/full/statie-robotizata-pentru-montajul 1/2 STAŢIE ROBOTIZATĂ PENTRU MONTAJUL MICROCILINDRILOR PNEUMATICI În aplicaţiile practice există mai multe variante de staţii robotizate. Aceste construcţii se diferenţiază prin mai multe aspecte: • destinaţia robotului • sarcina manipulată • spaţiul de lucru • numărul de grade de mobilitate • modul în care se acoperă spaţiul de lucru • soluţiile constructive adoptate pentru materializarea fecărui grad de mobilitate Alte aspecte care diferenţiază soluţiile constructive de roboţi întâlnite sunt: • tipul acţionării • tipul comenzii masa robotului În fgura l este prezentat robotul RV-Ml, aat în dotarea laboratorului, care va f implementat într-o aplicaţie ce constă în montarea unor microcilindri. !e fgură s-au "ăcut unnătoarele notaţii# • $ - batiu robot% • $& - braţ articulat% • '( - dispozitiv de orientare% • '& - dispozitiv de apucare% ) * - consolă de învăţare. • +emnalele care confrmă execuţia unei "aze sunt "urnizate de traductoare de proximitate cu semnale electrice, iar semnalele de comandă sunt digitale i sunt destinate unor distribuitoare pneumatice clasice. Robotii Mitsubisi pot f programati "olosind mediul de programare )(+R(!. &cesta permite crearea rapidă de programe pentru comanda roboţilor utiliz/nd limba0ele de programare M123& $&+) V sau M(V1M&+41R ) (MM&5'.
-
Upload
ciprian-gheorghe -
Category
Documents
-
view
256 -
download
7
Transcript of Staţie Robotizată Pentru Montajul

8/17/2019 Staţie Robotizată Pentru Montajul
http://slidepdf.com/reader/full/statie-robotizata-pentru-montajul 1/2
STAŢIE ROBOTIZATĂ PENTRU MONTAJULMICROCILINDRILOR PNEUMATICI
În aplicaţiile practice există mai multe variante de staţii robotizate.
Aceste construcţii se diferenţiază prin mai multe aspecte:
• destinaţia robotului• sarcina manipulată• spaţiul de lucru• numărul de grade de mobilitate• modul în care se acoperă spaţiul
de lucru• soluţiile constructive adoptate
pentru materializarea fecăruigrad de mobilitate
Alte aspecte care diferenţiazăsoluţiile constructive de roboţi întâlnite sunt:
• tipul acţionării• tipul comenzii
masa robotului
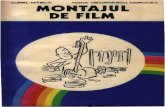
În fgura l este prezentat robotul RV-Ml,aat în dotarea laboratorului, care va fimplementat într-o aplicaţie ce constă
în montarea unor microcilindri. !efgură s-au "ăcut unnătoarele notaţii#
• $ - batiu robot%• $& - braţ articulat%• '( - dispozitiv de orientare%• '& - dispozitiv de apucare% ) * - consolă de învăţare.•
+emnalele care confrmă execuţia unei "aze sunt "urnizate de traductoare deproximitate cu semnale electrice, iar semnalele de comandă sunt digitale i suntdestinate unor distribuitoare pneumatice clasice.
Robotii Mitsubisi pot f programati "olosind mediul de programare )(+R(!.&cesta permite crearea rapidă de programe pentru comanda roboţilor utiliz/ndlimba0ele de programare M123& $&+) V sau M(V1M&+41R ) (MM&5'.

8/17/2019 Staţie Robotizată Pentru Montajul
http://slidepdf.com/reader/full/statie-robotizata-pentru-montajul 2/2
Funcţii utile existente în COSIO!:
• "unctie de invatare online a pozitiilor• afarea poziţiei pe o reprezentare tridimensională a robotului%• verifcarea sintaxei programelor%
• monitorizarea intrărilor i ieirilor%• monitorizarea Variabilelor%• execuţia comenzilor online%• diagnosticarea erorilor%• posibilitatea editării pozitiilor% managementul proiectului.
&tunci cand programul )(+R(! este lansat robotul incepe ciclucl#
• să trimită mai înt/i robotul în punctul de re"erinţă%• să deplaseze m/na mecanică într-un punct din spaţiul de lucru 6deasupra
unei piese aate în spaţiul de lucru al robotului7 cu o vitezăsetată%• o să coboare m/na mecanică i să prindă piesa ce urmează a f
manipulată%• o să revină în punctul anterior%• o s8 deplaseze piesa într-un alt punct din spaţiul de lucru, eventual cu o
altă viteză i dupăo traiectorie liniară%• o să desprindă piesa%• o să reia ciclul de lucru.
Concluzie:
Robotul RV-Ml a "ost "olosit pentru a experimenta o linie de asamblare, acestapoate f "olosit atat automat cu a0utorul unui program, dar si manual. &re unbuton de urgenta atasat care atunci cand este apasat robotul se bloceaza.!entru fecare comandă a unui grad de libertate al robotului se asociază ocomandă asemănătoare celei a unui motor cu scimbare de sens st/nga-dreapta6scimbarea polarităţii 9:- 7.