Sisteme de Reglare Vectoriala Ale Masinilor Asincrone

of 62
-
Upload
alexxxino900 -
Category
Documents
-
view
275 -
download
5
Transcript of Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
1/62
Sisteme de reglare vectoriala ale masinilor asincrone
CAPITOLUL I
MODELUL BIFAZAT AL MAINII ASINCRONE
Pentru realizarea unor sisteme de acionare reglabile este necesar obinerea unui modelmatematic unitar, general i simplu al funcionrii care s cuprind att regimul tranzitoriu ct i celstabilizat. Tratarea prin fazori spaiali realizeaz aceste cerine. Descompunerea fazorilor spaiali n
componente, ntrun sistem de referin rectangular duce la modelul bifazat al mainii asincrone,model care permite implementarea sistemelor de reglare vectorial.
!rimile trifazate se reduc la un vector plan numit fazor spaial care permite o scrierecompact a ecuaiilor de stare.
"azorul spaial caracterizeaz ntregul sistem trifazat, dup cum urmeaz# indic variaia n timp a mrimilor, precum i defaza$ul% indic defaza$ul n spaiu aprut datorit dispunerilor nfurrilor de faz din punct de
vedere constructiv.&n cazul unui sistem trifazat oarecare#
g=g ; g = a g ; g = a ga a b b c2
c '&.()se definete fazorul spaial cu relaia#
g =2
3(g +g+g )=
2
3(g + a g+a g )a b c a b
2
c '&.*)
+cest fazor spaial se poate descompune n dou componente, ntrun sistem de aerectangular#
g =g + j gd q '&.-)
la care se adaug i componenta omopolar#
)g+g+g(3
1=g cba0 '&./)
&n cazul unui sistem de reglare este necesar trecerea de la sistemul trifazat 'sistemul real) lasistemul bifazat pentru implementarea buclelor de reglare, iar apoi transformarea invers pentruobinerea mrimilor de referin necesare la comanda elementelor din circuitul de for. 0elaiile detrecere de la sistemul trifazat la cel bifazat sunt#
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
2/62
Sisteme de reglare vectorial ale mainilor asincrone
3
g-g=g
;g-g=g
cb
q
0ad
'&.1)
iar trecerea invers se realizeaz cu a$utorul relaiilor#
g+g
2
3-
2
g=g
g+g2
3+
2
g=g
g+g=g
0q
d
c
0q
d
b
0da
2
2 '&.3)
sau n cazul n care componenta omopolar e nul#
g2
3
-2
g
=g
g2
3+
2
g=g
g=g
q
d
c
q
d
b
da
2
2 '&.4)
Pornind de la ecuaiile mainii asincrone scrise pentru modelul trifazat i de la definiiafazorului spaial se obin urmtoarele ecuaii fazoriale#
rrrr
ssss
dtd+i=!
dt
d+i=!
'&.5)
relaii n care cu indicele s sau notat mrimile referitoare la stator, iar cu indicele r mrimile referitoarela rotor, 'vezi anea +.()
Descompunnd sistemul de ecuaii '&.5) ntrun sistem de referin rectangular general, da6a, seobin ecuaiile modelului bifazat#
- ecuaiile tensiunii statorice:
30
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
3/62
Sisteme de reglare vectorial ale mainilor asincrone
a
sdma
asqa
sqs
a
sq
asqma
asda
sdsasd
+dt
d
+i=!
-dt
d+i=!
'&.7)
-ecuaiile tensiunii rotorice:
ardrma
arqa
rqrarq
arqrma
arda
rdrard
)-(+dt
d+
i=
!
)-(-dt
d+i=!
'&.(8)
9a aceste ecuaii se adaug ecuaiile fluului#
i"+i"=
i"+i"=
arqm
asqs
asq
ardm
asds
asd
'&.(()
i"+i"=
i"+i"=
arqr
asqm
arq
ardr
asdm
ard
'&.(*)
precum i ecuaia de micare#
dt
d
#
$=t-t
rse
'&.(-)
relaie n care cu tei tssau notat cuplul electromagnetic, respectiv cel static, cu P numrul de perecide poli, iar cu :rviteza ungiular a rotorului. ;otaiile utilizate n aceast lucrare sunt eplicate nanea +.(.
&n relaiile '&.7)'&.(*) nu apar componentele omopolare, deoarece, ciar dac sunt prezente,ele nu influeneaz producerea cuplului i nici structura sistemului de reglare.&n cazul mainilor de inducie fluul din ntrefier nu este produs doar de nfurarea statoric ci
i de efectul comun al statorului i rotorului, astfel nct nu apare eplicit posibilitatea separrii celordou mrimi care produc cuplul 'fluul de magnetizare i curentul rotoric).
Dac se negli$eaz fluurile de scpri din stator i rotor 's
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
4/62
Sisteme de reglare vectorial ale mainilor asincrone
Pornind de la ecuaiile generale '&.7)'&.(*), pentru maina asincron cu rotorul n scurtcircuit,se obine#
a
mrma
a
ma
rr
a
r
a
mma
a
ma
ss
a
s
)-j(+dt
d+i=!
j+dt
d+i=!
'&.(1)
&n relaiile '&.(1) apare tensiunea electromotoare indus n stator#
%j+dt
d=e
amma
ama
'&.(3)
+ceast relaie se poate scrie#
ammam
m
ama
mmaaa j+
dt
d+)-j(=e '&.(4)
Dac se consider maina saturat, deci m
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
5/62
Sisteme de reglare vectorial ale mainilor asincrone
i+i=i
i"=
)-(+i=!
j+i=!
rsm
mmm
mrmarrr
mmasss
'&.*8)
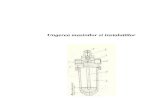
Pe baza acestor relaii se ridic diagrama fazorial din fig. &.( la care fazorul curentului rotoriceste perpendicular pe fazorul de flu.
CAPITOLUL III
PRINCIPIUL DE REGLARE CU ORIENTARE DUP CMP AL MAINILOR
ASINCRONE
Principiul de orientare dup cmp al mainilor de curent alternativ const n separarea
mrimilor care produc cuplul electromagnetic de mrimile care produc fluul de magnetizare. Prin
aceast metod de reglare maina asincron este comandat similar cu o main de curent continuu
compensat, cu ecitaie separat, la care cuplul electromagnetic este dat de fluul de ecitaie i
curentul din indus, mrimi care sunt independente.
33
&ig%'%1% (iagrama a*orial sim+liicat a mainii asincrone
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
6/62
Sisteme de reglare vectorial ale mainilor asincrone
III.1. Analogia dintre maina asincron i
maina de curent continuu
Pe baza ecuaiilor '&.(7) prezentate n paragraful &.( i a diagramei fazoriale, n fig.&&&.(. seprezint scematic maina asincron cu rotorul n scurtcircuit 'modelul bifazat bazat pe teoria fazorilor
spaiali) i maina de curent continuu cu ecitaie separat, precum i diagramele fazoriale
corespunztoare.
Dac nfurarea dup aa d este alimentat cu isd
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
7/62
Sisteme de reglare vectorial ale mainilor asincrone
>om considera rotorul calat, deci cuplul care apare n main nu va putea mica rotorul. &n
cazul n care componentele curentului statoric nu se modific, curentul rotoric, ir se va amortiza,
rmnnd ns tot timpul perpendicular pe m.
Scderea curentului rotoric va duce la deformarea diagramei fazoriale 'fig.&&&.*.b), pierznduseastfel analogia cu maina de curent continuu, deoarece curentul irnu mai este compensat i nici
curentul isdnu mai este egal cu cel de magnetizare. &ns, dac descompunerea curentului statoric nu se
face dup aele d6 statorice, ci dup un sistem de ae de coordonate d a6aorientate dup fazorul
fluului de magnetizare 'daorientat dup m), analogia cu maina de curent continuu se restabilete
'fig. &&&.*.c). Sistemul de ae da6aales, se va roti sincron cu fazorul spaial al fluului pstrnduse
astfel orientarea aelor. &n acest mod se pstreaz analogia cu maina de curent continuu i se
realizeaz controlul separat al celor dou componente care produc cuplul electromagnetic. &n acest cazspunem c maina asincron este ?orientat dup cmp?.
III.2. Principiul orientrii dup cmp al mainii asincrone
35
&ig%'''%3% rientarea mainii asincrone d!+ l!.
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
8/62
Sisteme de reglare vectorial ale mainilor asincrone
Principiul orientrii dup cmp se bazeaz pe analogia mainilor de curent alternativ 'cu cmp
nvrtitor) cu maina de c.c, realiznd separarea controlului mrimilor magnetice de cele mecanice,
care n final conduc la dou bucle de reglare independente , cu mrimi de reglare n c.c.
&n fig &&&.-.a este artat descompunerea curentului statoric dup cele dou ae ale sistemului
de referin orientat dup fluul de magnetizare m. =omponenta reactiv isd este orientat dup
direcia fluului nvrtitor, iar componenta activ este perpendicular pe aceast direcie. &n fig &&&.-.b
se arat scema bloc a unui sistem de reglare conceput pe baza orientrii dup cmp al mainii
asincrone alimentat de la un convertor static de frecven. Sunt puse n eviden cele dou bucle de
reglare corespunztoare componentelor activ i reactiv ale curentului statoric.
+plicarea principiului de orientare dup cmp presupune cunoaterea fluului de magnetizare.
Pentru determinarea acestuia se pot folosi dou metode#
Metoda direct, la care fluul este msurat direct cu a$utorul unor traductoare de flu montaten interiorul mainii 'fig. &&&./). &n acest caz, mrimea msurat este ciar o mrime de regla$, scemele
sunt mai puin sensibile n ceea ce privete erorile datorit variaiei parametrilor mainii, ns apare
dezavanta$ul prezenei traductoarelor de flu.
Metoda indirect, la care fluul este calculat cu a$utorul curenilor, tensiunilor i a vitezei
ungiulare ale motorului asincron 'fig.&&&.1.a i b). &n fig. &&&.1.a fluul se determin din valorile
36
&ig%'''%/% ,+licarea +rinci+i!l!i orientrii d!+ cm+
a) diagrama a*orial b) scema bloc a sistem!l!i de reglare
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
9/62
Sisteme de reglare vectorial ale mainilor asincrone
curenilor i tensiunilor statorice. +ceast metod prezint dezavanta$ul influenei puternice a buclelor
de reglare de ctre variaia rezistenei rotorice datorit modificrii temperaturii i de ctre variaia
inductivitii datorit fenomenului de saturaie a miezului feromagnetic. &n cazul metodei prezentate n
fig.&&&.1.b fluul de orientare se determin din curenii statorici i rotorici. +ceast metod nu este
influenat de rezistena rotorului ci numai de saturaia fierului, ns nu poate fi aplicat la motoarele
asincrone cu rotorul n scurtcircuit.
@n bloc important al sistemelor de
reglare cu orientare dup cmp l reprezint
blocul care realizeaz calculul modulului
fluului i ungiul pe care l face acesta cu
sistemul de referin staionar. +ceste valori
sunt utilizate pentru determinarea sistemuluide referin sincron care face posibil
orientarea dup cmp.
37
&ig%'''%4% 5etod direct de orientare d!+ cm+
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
10/62
CAPITOLUL IV
MODELUL DE FLU AL SISTEMELOR
DE REGLARE VECTORIAL
!odelul de flu realizeaz calculul respectiv msurarea 'n cazul metodei directe) modulului
fazorului spaial al fluului, ari poziia acestuia a'ungiul pe care l face vectorul spaial al fluului
cu aa d). Tot n cadrul acestui circuit se calculeaz i curentul de magnetizare, respectiv viteza
ungiular a acestuia 'ma
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
11/62
Sisteme de reglare vectorial ale mainilor asincrone
IV.1. Msurarea fluului !n ca"ul metodei directe de orientare dup cmp
!surarea fluului se poate realiza prin utilizarea sondelor cu efect Ball care furnizeaz direct
amplitudinea i poziia fazorului spaial al fluului rotoric. &ns aceste traductoare prezint
dezavanta$ul limitrii robusteii i costuri ridicate. De asemenea aceast metod nu poate fi utilizat la
turaii reduse datorit faptului c semnalele msurate au valori reduse fiind de acelai ordin de mrime
cu nivelul zgomotului, astfel aprnd erori mari de msurare.
Cist o alt metod de determinare a fluului, care realizeaz msurarea fluului de
magnetizare cu a$utorul tensiunilor induse n bobinele a dou din cele trei faze ale nfurrii statorice,
tensiuni care sunt accesibile n urma scoaterii unor prize de la nfurrile respective dup cum este
prezentat n fig.&>.(.
Tensiunile induse n dou bobine,parial suprapuse, ale aceleiai faze
sunt dependente de cderile de
tensiune i fluurile care strbat
bobinele respective#
dt
d+ir=!
dt
d+ir=!
2
22
111
'&>.*()
Deoarece aceste bobine sunt parcurse de acelai curent i bobinate similar, ele vor avea aceeai
rezisten. "cnd diferena dintre cele dou ecuaii ale sistemului '&>.() cderile de tensiune se
anuleaz rmnnd numai derivata diferenei fluurilor#
dt
)-d(=!-!
1212
'&>.**)
3!
&ig%'7%1% 8.+licativ la ms!rarea l!.!l!i +rin metoda direct
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
12/62
Sisteme de reglare vectorial ale mainilor asincrone
Se poate demonstra, c diferena dintre tensiunile induse n cele dou bobine, cu ecepia unui
factor de cuplare redus, este proporional cu fluul de magnetizare. Deci componentele fluului de
magnetizare se pot determina din aceste tesiuni induse n bobinele a dou faze astfel #
[ ]
[ ]
t)d!-!(-)dt!-!(29=dt
d
)dt!-!(9=dt
d
aabb2
mq
aa1md
*(*(
*(
'&>.*-)
&n cazul n care reglarea se face n sistem de referin orientat dup fluul rotoric este necesar
cunoaterea fluului rotoric. =omponentele fluului rotoric n sistem de referin staionar se pot
determina din fluul de magnetizare msurat, cu a$utorul relaiilor#
dt
di"-
dt
d
"
"=
dt
d
dt
di"-
dt
d
"
"=
dt
d
rq
rl
mq
m
rrq
sdrl
md
m
rrd
'&>.*/)
=omponenteleri rale modelului de flu se determin apoi cu a$utorul relaiilor#
rq
rd
r
2rq
2rdr
arctg=
+=
'&>.*1)
locul modelului de flu este prezentat n fig.&>.*. fiind realizat pe baza consideraiilor epuse
mai sus.
40
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
13/62
Sisteme de reglare vectorial ale mainilor asincrone
Deoarece
metoda direct
de orientare
dup cmp
necesit
intervenii n
construcia
motorului asincron i datorit dezavanta$elor pe care le prezint 'prezena traductoarelor de flu,
apariia de erori n sistemul de reglare n cazul funcionrii la turaii reduse), nu va fi tratat n detaliu
n continuare.
Se va pune accent pe metodele indirecte de reglare vectorial, care sunt mai uor de
implementat, nefiind necesar intervenia n construcia motorului asincron.
IV.2. Modelul de flu !n sistemul de referin orientat dup fluul rotoric
Pentru sistemele de reglare bazate pe metoda indirect de orientare dup fluul rotoric eist
mai multe moduri de realizare a acestui circuit n funcie de sistemul de coordonate la care se face
raportarea mrimilor, respectiv funcie de mrimile care se msoar din sistemul de acionare, structura
acestui circuit fiind dat de ecuaiile tensiunii rotorice.
&n sistem de coordonate sincron cu vectorul fluului rotoric, ecuaia vectorial a tensiunii
rotorice este#
;)-j(+dt
d+i=0
r
rrmr
r
rr
rr
'&>.*3)
cu rr.*5)
41
&ig%'7%2% 5odel!l de l!. ;n ca*!l metodei directe de orientare d!+ l!.!l rotoric
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
14/62
Sisteme de reglare vectorial ale mainilor asincrone
Dac modulul curentului de magnetizare rotoric este constant, atunci irm.5) se poate reprezenta circuitul modelului de flu, prezentat n
fig.&>.-.a. Se poate realiza un circuit similar avnd ca intrare ungiul intern rotoric n loc de viteza
ungiular rotoric 'fig.&>.-.b).
+cest tip de circuit prezint dezavanta$ul c este puternic influenat de constanta de timp
rotoric, fapt care poate duce la instabilitatea sistemului de reglare. +cest dezavanta$ poate fi eliminat
prin utilizarea unui bloc suplimentar care s realizeze estimarea constantei de timp rotorice, Tr.
=ircuitul modelului de flu se poate implementa i pe baza ecuaiilor de funcionare n sistem
de referin staionar. +stfel se poate realiza acest circuit avnd ca mrimi de intrare curenii statorici i
viteza ungiular a rotorului, pe baza relaiilor#
42
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
15/62
Sisteme de reglare vectorial ale mainilor asincrone
;
i:+i-i=
dt
di:
i:-i-i=dt
di:
mrdrrmrqsq
mrq
r
mrqrrmrdsdmrd
r
'&>.*7)
scema circuitului fiind dat n fig.&>./. Si n cazul acestui circuit, sistemul de reglare este influenat
puternic de variaiile constantei de timp rotorice. Pornind de la relaiile#
;
dt
di:-i:+
!=i+) rotoric
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
16/62
Sisteme de reglare vectorial ale mainilor asincrone
se poate realiza blocul modelului de
flu n coordonate staionare avnd ca
mrimi de intrare curenii, tensiunile
statorice i viteza ungiular a
rotorului, bloc reprezentat n fig.&>.1.
&n relaiile '&>.(8) Ts.-()
44
&ig%'7%/% 5odel!l de l!. ;n sistem de reerin> sta>ionar%
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
17/62
Sisteme de reglare vectorial ale mainilor asincrone
IV.#. Modelul de flu !n sistemul de referin orientat dup fluul statoric
Pentru determinarea ecuaiilor care caracterizeaz blocul modelului de flu n sistem de
referin statoric se pornete de la ecuaia vectorial a tensiunii rotorice#
)i"+i")(-j(+dt
id"+
dt
id"+i=!
s
sm
s
rrrms
s
sm
s
rr
s
rr
s
r '&>.-*)
45
&ig%'7%4% 5odel!l de l!. ;n coordonate sta>ionare avnd ca intrri vite*a !ngi!lar a rotor!l!i
tensi!nile i c!ren>ii statorici
&ig%'7%6% 5odel!l de l!. !tili*nd ca intrri mrimile tria*ate ale c!ren>ilor i ten
statorice%
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
18/62
Sisteme de reglare vectorial ale mainilor asincrone
Ccuaia '&>.(*) conine vectorul spaial al curentului rotoric, ns cum n cazul motoarelor cu
rotorul n scurtcircuit acesta nu poate fi direct determinat, trebuie eliminat prin nlocuirea acestuia cu
relaia#
"
i"-i=i
m
s
ss
mss
r
'&>.--)
=onsidernd nfurarea rotoric scurtcircuitat se obine urmtoarea ecuaie#
+
i"
""-i"j
+dt
id
"
""-
dt
id"+i
"
"-i=0
s
sm
rsmsrsl
s
s
m
rsmsr
s
s
m
smsr
'&>.-/)
Se poate observa c aceast ecuaie este mult mai complicat dect ecuaia tensiunii rotorice n
sistem de referin rotoric '&>.3), deci i structura modelului de flu n acest caz va fi mai complicat
dect n cazul orientrii dup fluul rotoric.
&n urma descompunerii ecuaiei '&>.(/) ntrun sistem de referin orientat dup fluul statoric
se obine sistemul de ecuaii#
:
i+
dt
di=i-
"
i"
i-
:
i+
dt
di=
i:"
"+
dt
id
"
"
r
ssq
ssqs
sd
s
msmsl
s
sqslr
ssd
ssd
msrs
mms
s
m
'&>.-1)
Dup cum se poate observa din sistemul de ecuaii '&>.(1) eist o interdependen ntre
componenta curentului statoric care produce cuplul i curentul de magnetizare statoric, deci o
modificare a lui iss6neurmat imediat de o modificare corespunztoare a lui i ssd, va duce la un regim
tranzitoriu nedorit al curentului de magnetizare statoric. +cest termen de cuplare poate fi eliminat prin
utilizarea unui circuit de decuplare al curenilor. +cest circuit trebuie s realizeze determinarea
curentului#
:+1
:i=i
r
rssqsl
sdec-sd
'&>.-3)
46
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
19/62
Sisteme de reglare vectorial ale mainilor asincrone
termen care se adaug la ieirea regulatorului de flu, obinnduse astfel valoarea de referin a
componentei curentului dup aa ds.
>iteza ungiular de alunecare se determin cu relaia#
)i"-i"(:
i"):+(1= s
sdsmsmr
ssqsr
sl
'&>.-4)
iar prin nsumarea acesteia cu viteza ungiular a rotorului i integrarea rezultatului se obine valoarea
ungiului fcut de vectorul spaial al fluului statoric cu sistemul de referin staionar#
t)d+(= rsls '&>.-5)
&n fig.&>.4 se prezint scema modelului de flu, iar n fig.&>.5 cea a circuitului de decuplare al
curenilor.
IV.$. Modelul de flu !n sistemul de referin orientat dup fluul de magneti"are
47
&ig%'7%?% 5odel!l de l!. ;n sistem de reerin> statoric%
&ig%'7%@% Airc!it!l de dec!+lare al c!ren>ilor ;n sistem de reerin>
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
20/62
Sisteme de reglare vectorial ale mainilor asincrone
Pentru obinerea ecuaiilor necesare determinrii modulului fluului de magnetizare i a vitezei
ungiulare a acestuia se pornete de la ecuaiile tensiunii rotorice, eprimate n sistem de referin
orientat dup vectorul spaial al fluului de magnetizare, ecuaii n care se negli$eaz efectul saturaiei#
)i"+i")(-j(+dt
id
"+dt
id
"+i=0 m
sm
m
rrrm
m
sm
m
rr
m
rr '&>.-7)
Climinnd din aceast ecuaie vectorul spaial al curentului rotoric#
i-i=i m
smmm
r '&>./8)
se obine ecuaia vectorial a tensiunii rotorice sub forma#
)i"-i")(-j(+dt
id"-
dt
di"+)i-i(=0
m
srlmmrrm
m
srl
mmr
m
smmr '&>./()
ecuaie mult mai complicat dect n cazul orientrii dup fluul rotoric, ceea ce denot o
implementare mult mai complicat a sistemelor de reglare bazate pe orientarea dup fluul de
magnetizare. =omparnd ecuaia '&>.*(), cu cea corespunztoare orientrii dup fluul statoric,
'&>.(*), se observ c sunt similare. Deci implementarea ambelor sisteme de reglare, cu orientare dup
fluul statoric respectiv cu orientare dup fluul de magnetizare, are acelai grad de compleitate n
ceea ce privete implementarea blocului modelului de flu.
Descompunnd ecuaia '&>.*() n sistemul de referin sincron cu vectorul fluului de
magnetizare, se obine#
:
i+
dt
di=)i-
:
:i(
;i-:
i+
dt
di=
:
)dt
di:+i(
rl
msq
msqm
sd
rl
rmmsl
msqsl
rl
msd
msd
rl
mmrmm
'&>./*)
+nalog cu cazul prezentat n paragraful &>.-, se observ c eist o interdependen nedoritntre componentele curentului statoric, fiind necesar un circuit de decuplare a curenilor, implementat
pe baza relaiei#
:+1
:i=i
rl
rlm
sqslmdec-sd
'&>./-)
4"
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
21/62
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
22/62
CAPITOLUL V
CIRCUITE DE DECUPLARE
&n cazul n care sistemul de acionare utilizeaz un invertor comandat n tensiune, comandainvertorului se realizeaz cu a$utorul componentelor tensiunii statorice obinute n buclele de reglare.
&ntre cele dou componente eist o interdependen care nu este pus n eviden de sistemul de
reglare.
Din acest motiv, n cazul acestor sisteme este necesar un circuit suplimentar 'circuit de
decuplare), care s realizeze calculul termenilor de cuplare dintre cele dou componente, ieirile
acestui bloc fiind adugate ieirilor regulatoarelor de curent din cadrul buclelor de reglare.
&ig%'7%10% Airc!it!l de dec!+lare al c!ren>ilor
&ig%'7%B% 5odel!l de l!. ;n sistem de reerin> orientat d!+ l!.!l de magneti*are
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
23/62
Sisteme de reglare vectorial ale mainilor asincrone
V.1. %ircuite de decuplare !n sistemul de referin orientat dup fluul rotoric
Tinnd cont de ecuaiile tensiunii statorice n sistem de referin rotoric i considernd sistemul
de acionare ideal 'nu eist ntrzieri datorate timpilor mori ai invertorului sau procesrii semnalelor),
ecuaiile circuitului de decuplare sunt#
;i)"-"(+i"=!
i"=!
mrmrssrsdsmr
rdec-sq
rsqsmr
rdec-sd
2
'>.()
care se adaug la ieirile u
rF
sd, u
rF
s6ale regulatoarelor de curent.Scema circuitului de decuplare este prezentat n fig.>.(, valorile lui i rmi mr fiind ieirile
circuitului de calcul al fluului 'modelul de flu).
Se poate implementa un circuit de decuplare care s utilizeze direct ieirile regulatoarelor de
curent, urFsdi urFs6, pe baza ecuaiilor#
;
!:+1
:+i)"-"(=!
!:+1
:=!
Crsd
s
smrssmr
rdec-sq
Crsd
s
smr
rdec-sd
2
'>.*)
unde p.*.
&n cazul unui sistem de
acionare real eist timpi dentrziere datorai invertorului,
procesrii semnalelor, etc. +ceti
timpi trebuie luai
&ig%7%1%Airc!it!l de dec!+lare ;n !nc>ie de c!ren>ii statorici
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
24/62
Sisteme de reglare vectorial ale mainilor asincrone
n considerare deoarece negli$area lor ar putea duce la apariia unor termeni eronai, din cauza crora
sistemul de reglare poate deveni instabil.
V.2. %ircuite de decuplare !n sistemul de referin orientat dup fluul statoric
&n mod similar cu cazul unui sistem de referin orientat dup fluul rotoric i n acest caz, dac
invertorul care alimenteaz motorul asincron este un invertor de tensiune, este necesar introducerea n
scema de reglare a unui circuit de decuplare, implementarea acestuia baznduse pe relaiile#
i"=!
0;=!
msmmss
dec-sq
sdec-sd
'>.-)
Dup cum se observ din
sistemul de ecuaii '>.-), acest circuit
are o form simpl, sistemele de
reglare cu orientare dup fluul
statoric la care motorul asincron este
alimentat de la invertoare de tensiune
este mai simplu din acest punct de
vedere dect sistemele de reglare cu orientare dup fluul rotoric. Structura acestui circuit este
prezentat n fig.>.-.
V.#. %ircuite de decuplare !n sistemul de referin orientat
dup fluul de magneti"are
&ig%7%2% Airc!it!l de dec!+lare ;n !nc>ie de ieirile reg!lator!l!i de
&ig%7%3%Airc!it!l de dec!+lare ;n sistem de reerin> statotric
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
25/62
Sisteme de reglare vectorial ale mainilor asincrone
Si n cazul ecuaiilor mainii asincrone n sistem de coordonate orientat dup fluul de
magnetizare apare o interdependen intre ecuaiile corespunztoare celor dou ae de coordonate,
fiind necesar eliminarea acestei interdependene prin utilizarea unui circuit de decuplare.
Dac se presupune c fluul de magnetizare este constant sistemul de ecuaii corespunztor
circuitului de decuplare are forma#
)i"+i"(=!
i"=!
mmmmsdslm
mdec-sq
msqslm
mdec-sd
2
'>./)
structura acestui circuit fiind prezentat n fig.>./.
&ig%7%/% Airc!it!l de dec!+lare ;n sistem de reerin> orientat d!+ l!.!l de magneti*are
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
26/62
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
27/62
Sisteme de reglare vectorial ale mainilor asincrone
Descompunand aceasta relatie in componentele dr6rsi tinand cont ca fazorul curentului demagnetizare rotoric este coaial cu aa dra sistemului de coordonate, se obtin ecuatiile curentuluistatoric#
i):-:(-i:-
!=i+
dt
di:
dt
id):-:(-i:+
!=i+
dt
di:
mrmrssrsdSmr
s
rsqr
sq
rsq
s
mrss
rsqsr
s
rsdr
sd
rsd
s
'>&./4)
cu#
;
""
"-1=iar"="!nde
"=:
rs
2m
ss
s
s
s
>ectorul spatial al curentului rotoric a fost inlocuit in relatia '>&.-) cu#
r
r
srmr
r+1
i-i=i '>&./)
>alorile de referinta ale curentilor statorici se pot obtine cu a$utorul relatiei '>&.-), insa seobserva ca eista o interdependenta intre cele doua componente ale curentului statoric. Din aceastacauza este necesar un circuit care sa realizeze calculul tensiunilor de referinta statorice 'circuit dedecuplare) care sa tina cont de interdependenta dintre componentele curentului statoric in sistem decoordonate sincron.
VI#1#2# R*)&.*& /-'-&.*)-. &,(+$.-+* &)(/*+'&'* $% (+*.'-&.* * '*+,(%+*#
Datorita avanta$elor clare ale invertoarelor cu modulatie in latime 'PG!), voi trata pe largsistemele de actionare cu motor asincron alimentat de la invertor PG! cu circuit intermediar dec.c. de tip sursa de tensiune.
VI#1#2#1# S(,'*/* * &$'(-+&.* $% /-'-. &,(+$.-+ &)(/*+'&' * )&(+*.'-. PM $-/&+&' (+ '*+,(%+*
&n fig.>&.* se prezinta un sistem de reglare vectoriala cu orientare dupa fluul rotoric pentrucazul in care motorul asincron este alimentat de la un invertor de tensiune de tip PG! comandat intensiune. !etoda utilizata pentru comanda invertorului poate fi oricare din cele prezentate in capitolul&&, structura buclelor de reglare fiind aceeasi.
!odelul de flu utilizat pentru obtinerea lui imrsimreste cel prezentat in capitolul &> folosindca intrari curentii statorici si viteza ungiulara a rotorului. Deasememea modulul curentului demagnetizare rotoric este utilizat pentru calculul cuplului cu a$utorul relatiei#
ii
"
"#
2
3=t
rsqmr
r
2m
e '>&.1)
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
28/62
Sisteme de reglare vectorial ale mainilor asincrone
Determinarea referintei componentei dupa aa d ra curentului statoric se obtine cu a$utorulregulatorului de flu de tip P&, E0E, referinta modulului fluului rotoric fiind obtinuta prin intermediulcircuitului de slabire de camp, EH"E. >aloarea de referinta a componentei dupa aa 6r a curentuluistatoric se obtine cu a$utorul regulatoarelor de turatie, E0E, respectiv de cuplu, ?0tE, ambele fiind de tipP&.
Crorile dintre componentele valorilor reale si de referinta ale curentilor statorici, in sistem de
referinta sincron cu fluul rotoric, se utilizeaza ca intrari pentru regulatoarele de curent, E0&E, iesirileacestora fiind adaugate circuitului de decuplare, E=DE, obtinanduse valorile de referinta alecomponentelor tensiunii statorice in sistem de referinta rotoric. +cestea sunt transformate in sistem dereferinta stationar cu a$utorul blocului Ee$rE si apoi se obtin valorile de referinta in sistem trifazat cua$utorul blocului de transformare E*-E, valori care se utilizeaza la comanda invertorului PG!.
Sistemul de reglare prezentat in fig.>&.* duce la obtinerea unui raspuns dinamic rapid datoritareglarii in doua bucle independente.
I scema de reglare mai simpla se prezinta in fig.>&.-.a in care se elimina circuitul carerealizeaza slabirea de camp, insa in acest caz trebuie ca referinta fluului rotoric sa fie mentinuta la ovaloare constanta. 0eferinta componentei irFsdse obtine prin impartirea modulului fluului la valoarea
inductivitatii de magnetizare. >aloarea de referinta a vitezei ungiulare se compara cu valoareamasurata a acesteia, eroarea fiind marime de intrare in regulatorul P& a carui iesire reprezintacomponenta dupa aa 6ra curentului statoric. >alorile de referinta ale tensiunilor statorice in cazulacestui sistem de reglare se determina cu relatiile#
i"+i=!
i"-i=!Cr
sdsmrCr
sqsCr
sq
Crsqsmr
Crsds
Crsd
'>&.3)
valori care se utilizeaza la comanda invertorului in urma transformarilor in sistem de referinta stationar,
Ee$rE si apoi in sistem trifazat, E*-E.
&ig%7'%2% Sistem de reglare c! orientare d!+a l!.!l rotoric in ca*!l !tili*arii !n!i invertor #D5
comandat in tensi!ne
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
29/62
Sisteme de reglare vectorial ale mainilor asincrone
Cste deasemenea posibila calcularea valorilor de referinta a tensiunilor statorice direct in sistemde referinta stationar, cu a$utorul unor blocuri implementate pe baza ecuatiilor#
i)"+(-i)"+(=!
i)"+(-i)"+(=!
Cr
sdrss
Cr
sqrss
C
sq
Crsqrss
Crsdrss
Csd
cossin
sincos '>&.4)
structura acestui circuit fiind prezentata in fig.>&./.&mplementarea din fig.>&./ este posibila numai in cazul in care inductivitatea statorica
tranzitorie 9sE poate fi negli$ata in raport cu cea de magnetizare 'motoare asincrone cu rotorul inscurtcircuit standard), &n cazul servomotoarelor, la care 9meste de valoare mica, acest lucru nu mai este
posibil. I solutie ar fi adaugarea termenului 9Esdirs6Adt la ecuatiile '>&.4) obtinanduse un raspuns rapidin regim dinamic, insa este necesara derivarea componentei curentului statoric care produce cuplul. I adoua solutie poate fi realizata prin introducerea unui termen de intarziere corespunzator inductivitatiitranzitorii. +cest lucru se realizeaza cu a$utorul blocului din fig.>&.-.b, bloc care se conecteaza intre
punctele marcate cu +, si = ale scemei din fig.>&.-.a. =omparativ cu prima metoda aceastarealizeaza o intarziere a raspunsului in regim dinamic.
&ig%7'%/% Eloc!l de calc!l al reerintelor tensi!nii statorice
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
30/62
Sisteme de reglare vectorial ale mainilor asincrone
&ig%7'%3% Scema de reglare c! orientare d!+a l!.!l rotoric
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
31/62
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
32/62
Sisteme de reglare vectorial ale mainilor asincrone
care poate varia in timpul functionarii. +cest dezavanta$ poate fi eliminat prin utilizarea unui estimatorde constanta de timp rotorica, care face obiectul unui alt paragraf, sau prin utilizarea scemei dinfig.>&.4, in care pozitia fluului rotoric, 'r), se determina ca suma dintre ungiul intern al rotorului sivaloarea de referinta a vitezei ungiulare de alunecare#
i:
i=
;+=;dt=
Crsdr
CrsqCsl
Cslrmrmrr
'>&.5)
Pentru obtinerea unei valori precise pentru reste necesara determinarea cu acuratete a celordoua ungiuri, lucru care se realizeaza digital. @ngiul intern al rotorului, 'r), poate fi obtinut cua$utorul unui senzor de pozitie, sau poate fi calculat prin integrarea vitezei ungiulare a rotorului. &ncazul in care se utilizeaza un traductor de pozitie pentru masurarea ungiului rotoric, viteza ungiularase obtine la iesirea unui regulator de pozitie, regulator de tip P&, care are ca intrare eroarea dintrevaloarea prescrisa si cea masurata a pozitiei rotorului.
>aloarea masurata a vitezei ungiulare se foloseste pentru determinarea valorii de referinta acurentului de magnetizare rotoric cu a$utorul circuitului de slabire de camp, EH"E. 0eferintele curentuluistatoric se determina pe baza relatiilor#
"
"#
2
3
t=i
i):+(1=i
r
2m
CeCr
sq
Cmrr
Crsd
'>&.7)
=omanda invertorului se poate realiza pe baza modularii in sistem de referinta stationar, cazin care partea de scema corespunzatoare este similara cu cea prezentata in fig.>&.3, sau prinmodularea in sistem de referinta sincron cu fluul rotoric ca in fig.>&.4. &n acest caz se comparavalorile de referinta ale componentelor curentilor statorici cu valorile reale obtinute, la iesirea
blocurilor E-*E si Ee$E, din valorile masurate ale curentilor statorici. locul modulator, EPG! SE,este implementat pe baza tabelului &&.(, prezentat in capitolul &&.
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
33/62
Sisteme de reglare vectorial ale mainilor asincrone
VI#1#3# R*)&.*& /-'-&.*)-. &,(+$.-+* &)(/*+'&'* $% (+*.'-&.* * $%.*+'
&n acest paragraf se prezinta un sistem de reglare cu orientare dupa fluul rotoric a unui motorasincron alimentat printrun invertor de curent cu conductie pe toata durata pulsului, scema de reglarefiind data in fig.>&.(8.
=urentul de magnetizare rotoric sau modulul fluului rotoric, precum si ungiul facut devectorul spatial respectiv cu aa d a sistemului de referinta stationar se determina cu a$utorulmodelului de flu prezentat in capitolul &>. Ibtinerea valorilor de referinta ale componentelor
curentilor statorici este similara cu metodele folosite in paragrafele precedente. >aloarea lui i rFsd seobtine in urma circuitului de slabire de camp si a unui regulator de flu. =omponenta i rFs6se obtine
&ig%7'%?% Sistem de reglare a !n!i motor asincron alimentat de la invertor #D5 comandat in c!rent
+rin metoda in sistem de reerinta sincron
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
34/62
Sisteme de reglare vectorial ale mainilor asincrone
dupa regulatorul de turatie si cel de cuplu, valoarea cuplului electromagnetic fiind determinata cua$utorul relatiei '>&.1).
Datorita faptului ca invertorul este unul cu conductie pe toata durata pulsului, mentinereaconstanta a curentului din circuitul de curent continuu se realizeaza prin comanda corespunzatoare aelementelor redresorului. Deci redresorul trebuie sa fie comandat, realizat dintro punte cu tiristoare.
&ntervalul de timp pentru comutatia starilor invertorului este caracterizat de e$, unde ungiul se modifica in pasi cu valoarea de JA-.
>alorile de referinta ale componentelor curentului statoric constituie marimi de intrare inblocul E0PE, care realizeaza calculul modulului vectorului spatial al curentului statoric si al ungiuluipe care il face acesta cu aa dra sistemului de referinta rotoric, F'fig.>&.((). >aloarea acestui ungieste adaugata ungiului facut de flu cu sistemul de referinta stationar, r, obtinanduse valoarea dereferinta a ungiului vectorului curentului statoric fata de aa d a sistemului de referinta stationar, s.+cest ungi este apoi comparat cu valoarea ungiului , descris anterior, care reprezinta iesireanumaratorului bidirectional in pasi, E;E, ungi care reprezinta starea invertorului. Croarea rezultata inurma compararii reprezinta semnalul de intrare pentru regulatorul de ungi, E0E, de tip P&, iesirea
acestuia fiind semnalul care comanda incrementarea sau decrementarea cu A- a valorii numaratoruluiin sase pasi.
&ig%7'%10% Sistem de reglare c! orientare d!+a l!.!l rororic a !n!i motor asincron alimentat
+rintr-!n invertor de c!rent
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
35/62
Sisteme de reglare vectorial ale mainilor asincrone
+ceasta metoda de comanda a invertorului de curent prezinta avanta$ul reducerii, la turatii mici,
a pulsatiilor cuplului electromagnetic rezultate din interactiunea dintre curentul de magnetizare rotoric,aproimativ sinusoidal si curentul statoric, nesinusoidal. =u toate acestea, aceasta metoda de reglare nupoate fi folosita in cazul actionarilor cu servomotoare asincrone, unde la turatii mici este necesarcontrolul cuplului dezvoltat de motor.
+mplitudinea curentilor statorici este controlata prin intermediul curentului din circuitulintermediar de c.c., id, pentru aceasta utilizanduse un regulator de curent de tip P&. =urentul dincircuitul intermediar de c.c. este influentat de tensiunea electromotoare indusa 't.e.m.) de catre motorulasincron. &n timpul regimului tranzitoriu aceasta metoda de reglare a curentului i dnu da rezultatelescontate, datorita prezentei acestei t.e.m. &nfluenta ei poate fi redusa prin marirea constantei de
proportionalitate a regulatorului de curent, insa nici aceasta metoda nu are performante ridicatedeoarece t.e.m. este influentata de o serie de factori care au o dinamica mai rapida, sau cel putin la fel
de rapida, cu cea a curentului din circuitul intermediar de c.c. I solutie la aceasta problema oreprezinta utilizarea unui generator de functii ,ET.e.m.estE, care sa estimeze valoarea tensiunii induse.>aloarea tensiunii induse datorita motorului asincron este data de relatia#
;i)j+)("-"(=! mrmrssE '>&.(8)
insa este necesara eprimarea ei in functie de marimea de intrare a invertorului. 0elatia carecaracterizeaza circuitul de curent continuu al convertorului este#
!+i)"+(=! id&&d '>&.(()
;egli$and pierderile din invertor, ecuatia care caracterizeaza invertorul este#
);i!e(32=i! Crs
rsdi '>&.(*)
unde Fdenota in acest caz comple con$ugata curentului statoric.0elatiile necesare implementarii blocului estimator al t.e.m. se obtin din relatiile '>&.(8)
'>&.(*) si din ecuatia tensiunii statorice '>&.-), avand mai multe forme, in functie de marimile deintrare folosite#
;i#
t=!
d
mreE
'>&.(-)
&ig%7'%11% (iagrama a*oriala in sistem de reerinta rotoric
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
36/62
Sisteme de reglare vectorial ale mainilor asincrone
i#
i:
i+t
=!d
mrr
rsd
mre
E
'>&.(/)
i#
i"#2
3
t+t
=!d
2mr
2m
re
re
E
'>&.(1)
I implementare simpla a acestui circuit se obtine daca tese inlocuieste cu valoare de referinta acuplului, tFe.
+nalog cu metodele prezentate in paragraful >&.*, si in acest caz pozitia fluului rotoric, r,poate fi determinata din ungiul intern al motorului si ungiul corespunzator vitezei de alunecare.+ceasta scema este prezentata in fig.>&.(*. =omanda invertorului se realizeaza in functie de pulsatiatensiunii statorice data de relatia#
CC
slr
CCslr
C1 ++=++== '>&.(3)
VI.2. &isteme de actionare cu motor asincron si con'ertoare statice de frec'enta cu orientaredupa fluul statoric.
!etodele de reglare cu orientare dupa fluul statoric sunt mai putin raspandite in practica,datorita compleitatii modelului de flu, cu toate ca ecuatiile tensiunii statorice si circuitul dedecuplare sunt mai simple decat in cazul sistemelor de reglare bazate pe orientare dupa fluul rotoric.
VI#2#1# E$%&'(()* '*+,(%+(( ,'&'-.($* (+ ,(,'*/%) * .**.(+'& ,'&'-.($
&ig%7'%12% Scema de reglare c! determinarea indirecta a +o*itiei l!.!l!i rotoric
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
37/62
Sisteme de reglare vectorial ale mainilor asincrone
&n acest paragraf se determina ecuatia vectoriala a tensiunii statorice in sistem de referintaorientat dupa fluul statoric, iar apoi se realizeaza descompunerea acestei ecuatii dupa aele ds6s.
Pornind de la ecuatia vectoriala a tensiunilor statorice in sistem de referinta general si negli$andefectul saturatiei, se obtine urmatoarea ecuatie vectoriala in sistem de referinta orientat dupa fluulstatoric, sistem de referinta ce se roteste sincron cu viteza ungiulara ms&.(5)
iar in urma inlocuirii in ecuatia '>&.(4) se obtine#
i"j+dt
id"+i=! msmms
msm
s
sss
s '>&.(7)
+ceasta ecuatie este mult mai simpla decat cea corespunzatoare orientarii dupa fluul rotoric'>&.*).
&n urma descompunerii ecuatiei '>&.(7) dupa aele ds6s, se obtine#
i"-
!=i
;dt
di
"-
!=i
s
msmms
s
ssqs
sq
ms
s
m
s
ssds
sd
'>&.*8)
VI#2#2#S(,'*/* * -.(*+'&.* %& )%%) ,'&'-.($
Datorita faptului ca ecuatiile tensiunii statorice, '>&.*8), precum si circuitul de decuplare'fig.&&.(7) sunt mai simple in cazul orientarii dupa fluul statoric, aceasta metoda se preteaza laactionari cu motoare asincrone alimentate de la invertoare de tensiune, acesta fiind motivul pentru caream tratat doar aceste sisteme de actionare in acest paragraf.
&n fig.>&.(/ se prezinta un sistem de reglare cu orientare dupa fluul statoric, motorul asincronfiind alimentat printrun invertor PG! cu caracter sursa de tensiune comandat in curent. Scema
prezentata este similara cu cea din fig.>&./, eistand insa unele diferente care vor fi eemplificate incontinuare.
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
38/62
Sisteme de reglare vectorial ale mainilor asincrone
>aloarea de referinta dupa aa dsa curentului statoric este obtinuta ca suma dintre semnalele deiesire din regulatorul de flu, E0E, si circuitul de decuplare al curentilor, E=DiE, descris in capitolul >.0eferinta isFs6este obtinuta la iesirea regulatorului de cuplu, regulator care are ca intrare eroarea dintrevaloarea prescrisa a cuplului electromgnetic si valoarea actuala a acestuia, data de relatia#
ii"#
2
3=t ms
ssdme '>&.*()
=omanda invertorului se realizeaza pe baza principiului modularii in sistem de referintastationar.
DatoritK faptului cK sistemele de orientare dupK fluul statoric sunt mai putin utilizate,deoarece circuitul modelului de flu este mai complicat, am realizat simularea numai pentru unsistem de actionare a motorului asincron alimentat cu un invertor PG! comandat in tensiune prin
metoda vectorilor spatiali.
VI.#. &isteme de actionare cu motor asincron si con'ertoare statice de frec'enta cu orientaredupa fluul de magneti"are.
VI#3#1# E$%&'(()* '*+,(%+(( ,'&'-.($* (+ ,(,'*/%) * .**.(+'&
-.(*+'&' %& )%%) * /&+*'(&.*
Pornind de la ecuatia vectoriala scrisa in sistem de referinta general si negli$and efectul de
saturatie al circuitului magnetic, ecuatia vectoriala a tensiunii statorice in sistem de referinta orientatdupa fluul de magnetizare devine#
&ig%7'%1/% Sistem de reglare c! orientare d!+a l!.!l statoric a !n!i motor asincron alimentat c!
invertor #D5 comandat in c!rent
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
39/62
Sisteme de reglare vectorial ale mainilor asincrone
)i"+i"(j+dt
id"+
dt
id"+i=!
m
rm
m
ssm
m
rm
m
ss
m
ss
m
s '>&.**)
+vand in vedere ca, in cazul motoarelor asincrone cu rotorul in scurtcircuit, curentul rotoric nueste direct accesibil masurarii, acesta se elimina din ecuatia '>&.**). +stfel forma ecuatiei tensiuniistatorice devine#
)i"+i"(j+dt
di"+
dt
id"+i=! mmm
m
sslmmm
m
m
ssl
m
ssm
s '>&.*-)
Ccuatia tensiunilor statorice in sistem de referinta orientat dupa fluul de magnetizare este maicomplicata decat cea in sistem de referinta statoric ceea ce duce la un sistem de reglare mai complicatin cazul actionarilor cu motoare asincrone alimentate de la invertoare comandate in tensiune, fata decazul sistemelor de reglare orientate dupa fluul statoric.
Ccuatiile tensiunii statorice corespunzatoare aelor dm6m, se obtin prin descompunerea ecuatieivectoriale '>&.*-) dupa cele doua ae ale sistemului de referinta orientat dupa fluul de magnetizare#
)i"+i"(-
dt
di:-
!=i
;i:+dt
di"-
dtdi:-
!=i
s
mmmmsdslm
msq
sl
s
msqm
sq
msqslm
mm
s
m
m
sdsl
s
m
sdmsd
'>&.*/)
Din acest sistem de ecuatii se observa interdependenta dintre cele doua ecuatii rezultandnecesitatea eistentei unui circuit de decuplare al tensiunilor, circuit descris in capitolul >.
VI#3#2#S(,'*/* * -.(*+'&.* %& )%%) * /&+*'(&.*
+vand in vedere similitudinea dintre sistemele de reglare prezentate anterior si eplicarea pelarg in paragrafele precedente a diferentelor ce apar intre sistemele de orientare, in acest paragraf am
prezentat o singura scema de reglare bazata pe principiul orientarii dupa fluul de magnetizare. &nfig.>&.(4 se arata scema bloc a sistemului de reglare cu orientare dupa fluul de magnetizare a unuimotor asincron alimentat de la un invertor de tensiune comandat in curent pe baza principiuluimodularii in sistem de referinta stationar.
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
40/62
Sisteme de reglare vectorial ale mainilor asincrone
Datorita compleitatii circuitului modelului de flu, ungiul pe care il face aa d ma sistemuluide referinta sincron cu aa d a sistemului de referinta fi se determina in functie de ungiul intern almotorului si ungiul corespunzator vitezei ungiulare de alunecare#
td+=+= CslrCslrm '>&.*1)
&ig%7'%1 ?% Sistem de reglare c! orientare d!+a l!.!l de magneti*are
a !n!i motor asincron
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
41/62
Sisteme de reglare vectorial ale mainilor asincrone
CAPITOLUL VII
ESTIMAREA CONSTANTEI DE TIMP ROTORICE
I A TURA8IEI
VII.1. (stimarea parametrilor mainii asincrone
Datorit avanta$elor metodelor de reglare bazate pe principiul orientrii dup fluul rotoric, seva studia n continuare influena parametrilor mainii asincrone asupra sistemului de reglare, precum i
metodele de estimare a acestora numai pentru cazul acestor metode. &n cazul orientrii dup fluulstatoric sau de magnetizare, studiul este similar, ns rezult sceme mai complicate n cazul utilizriicircuitelor de estimare a parametrilor mainii asincrone.
VII#1#1# I+)%*+9& &.&/*'.()-. /&:(+(( &,(+$.-+*
&,%.& ,(,'*/%)%( * .*)&.*
!etodele indirecte de reglare vectorial utilizeaz modelul mainii pentru a calcula ungiulcmpului magnetic. Parametrii mainii se modific cu temperatura sau cu saturaia miezuluiferomagnetic. >ariaia parametrilor mainii determin neregularitile n reglarea motoarelor asincrone,influennd valoarea fluului rotoric i a cuplului electromagnetic.
Pornind de la ecuaiile mainii asincrone n sistem bifazat, precum i de la ecuaiile modeluluide flu i epresia cuplului electromagnetic se poate studia influena variaiei parametrilor asuprasistemului de reglare.
Pentru a avidenia aceast influen am obinut epresia raportului ntre cuplul electromagnetictei valoarea de referin a acestuia teFde forma#
):(+1
):(+1
:
:
"
"
"
"=
t
t2
rsl
C
2
r
C
sl
C
r
C
r
r
r
C
m
C
m
e
C
e
'>&&.*3)
Din relaia '>&&.() se pot observa dou cazuri# (). Croare n rezistena rotoric determinat de variaia temperaturii. =onsidernd 9m&&.*4)
*). Croare n inductana de magnetizare datorit saturaiei mainii. =u 9m
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
42/62
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
43/62
Sisteme de reglare vectorial ale mainilor asincrone
acionare este necesar estimarea parametrilor mainii i introducerea valorilor estimate n buclele dereglare.
9iteratura de specialitate ofer o serie de metode de estimare a parametrilor mainii asincrone,dintre care se pot aminti#
metoda de reglare bazat pe modelul bifazat al mainii asincrone% metoda de reglare bazat pe transferul de putere%
monitorizarea direct a suprapunerii vectorului fluului cu componenta curentului statoric careproduce cuplul%
metoda de estimare bazat pe compararea semnalelor msurate ale tensiunilor statorice cu celecalculate cu a$utorul modelului de flu%
metoda bazat pe ecuaiile filtrului Malman etins.Din studiul metodelor de estimare oferite de literatura de specialitate sa ales, ca fiind cea mai
performant, metoda filtrului Malman etins. +cest metod este dificil de implementat pe un sistemde reglare realizat cu componente analogice, ns nu ridic probleme deosebite la implementarea ncadrul unui microsistem realizat cu microprocesor, mai ales n cazul n care acesta are o vitez de
procesare ridicat.
Pentru nelegerea algoritmului filtrului Malman sa descris iniial utilizarea lui la rezolvareaecuaiilor de funcionare ale motorului asincron, apoi la algoritmul filtrului Malman etins pentruestimarea constantei de timp rotorice.
VII#1#2#1# M-*)%) /&:(+(( &,(+$.-+*
Ccuaiile de funcionare ale mainii asincrone pot fi puse sub forma#
;
!+FA=G
!E+F,=dt
dF
'>&&.-/)
sistem de ecuaii care poate fi rezolvat cu a$utorul filtrelor Malman discrete. &n acest sistem de ecuaiiintervin urmtoarele mrimi#
N variabila de stare care este format din componentele curenilor statorici i fluului rotoricn sistem de referin staionar%
;&&.-3)
u mrimea de intrare%;
:sqsd '>&&.-4)
- +, , =, D matrici coeficieni ai sistemului de ecuaii corespunztor filtrului Malman%
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
44/62
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
45/62
Sisteme de reglare vectorial ale mainilor asincrone
Pornind de la ecuaiile filtrului, se dezvolt urmtorul algoritm de rezolvare#(. stabilirea condiiilor iniiale#
#(0);=#;=;K=K);tF(=. 00000
unde Q, 0, P sunt matricile covariante ale lui :, v, respectiv N%
8LI(9)M= 0; 8LI(9)I(j) M= K ; K 0:
9j
8Lv(9)M= 0; 8Lv(9)v(j) M= ; 0:
9j
8L.(0)M=. ; 8L(.(0) -. )(.(0)-. ) M=#0C
0C
0C :
0
*. calculul valorii mrimii de stare pentru pasul urmtor#F(9 +1N9) = &(t)F(9 N 9)+J(t)!(t)9 9 9
-. calculul matricii covariante#
#(9 +1 N 9 )= &(t)#(9 N 9)&(t) +K9:
9
/. calculul matricii proporionale#
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
46/62
Sisteme de reglare vectorial ale mainilor asincrone
F( 9+ 1N9 +1) = F(9 +1N9) + O(t)G(t)- H(t)F(9+1 N 9)&&.(1)
n care semnificaiile mrimilor sunt similare cu cele din paragraful >&&.(.*.(. >ectorul mrimilor destare, fiind etins, are forma#
&&.(4)
0elaiile de recuren pentru calculul componentelor vectorului de stare sunt#
(9)I+(9)!a+(9).(9)a
+(9).(9).a+(9).(9)a+(9).a=1)+(9.
1114/r
1/
34132r
121
111
+
(9)I+(9)!a+(9).(9).a
+(9).(9)a+(9).a+(9).(9)a=1)+(9.
2224/4
2/
3r232
221r
212
+
(9)I+(9)!a+(9).(9)a
+(9).(9).a+(9).+(9).(9)a+(9).a=1)+(9.
3134/r
3/
3433e2r
321
313
+
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
47/62
Sisteme de reglare vectorial ale mainilor asincrone
(9)I+(9)!a+(9).(9).a
+(9).+(9).(9)a+(9).a+(9).(9)a=1)+(9.
/2/4/4
//
/3r/32
/21r
/1/
+
4 4 4. (9 +1)=. (9)+I(9)
!atricea "') care intervine n algoritmul filtrului Malman etins este#
10000
(9).a(9).a+1(9)aa(9)a
(9).a(9)a(9).a+1(9)aa
(9).a(9).a(9)aa(9)a
(9).a(9)a(9).a(9)aa
=&(9)
///4
//r
/3
/2r
/1
333r
3/4
33r
32
31
/2/4
2/r
23
22r
21
314r
1/4
13r
12
11
relaiile de recuren ale algoritmului filtrului fiind similare cu cele prezentate anterior, cu ecepiarelaiei care calculeaz vectorul de stare pentru pasul urmtor#
))t!()2t(F(=N9)1+9F( 99 '>&&.(5)
&n fig.>&&.(( se prezint un sistem de reglare cu orientare dup fluul rotoric cu estimareaconstantei de timp rotorice pe baza algoritmului filtrului Malman etins.
>alorile de intrare n blocul care realizeaz algoritmul filtrului Malman etins suntcomponentele tensiunii statorice n sistem de referin staionar, care se obin n urma unui bloc detransformare de la trei la dou faze.
&ig%7''%@% Sistem de reglare c! orientare d!+ l!.!l rotoric !tili*nd iltr!l Oalman +entr!
estimarea constantei de tim+ rotorice
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
48/62
Sisteme de reglare vectorial ale mainilor asincrone
&nvertorul PG! care alimenteaz motorul de acionare este comandat n tensiune prin metodavectorilor spaiali, folosind ca mrimi de intrare componentele tensiunii statorice n sistem de referinstaionar. +ceste componente se obin la ieirea blocului de transformri de ae, bloc care are ca intrritensiunile statorice de referin n sistem de coordonate sincron cu fazorul spaial al curentului rotoric,obinute n urma aplicrii blocului circuitului de decuplare i a regulatoarelor de curent.
=omponentele referinei curentului statoric se obin din turaia motorului i curentul de
magnetizare rotoric. =urentul de magnetizare rotoric precum i valoarea ungiului pe care l facefazorul spaial al fluului rotoric cu aa longitudinal a sistemului de referin staionar se determin pebaza relaiilor care stau la baza circuitului model de flu, lund n considerare i constanta rotoric detimp estimat cu a$utorul filtrului Malman etins. Tot cu a$utorul blocului corespunztor filtruluiMalman etins se estimeaz i componentele curentului statoric, valori care sunt utilizate deregulatoarele de curent.
VII.2. &isteme de reglare cu orientare dup cmp fr traductoare de turaie
&n cadrul sistemelor moderne de reglare a acionrilor cu motoare asincrone, traductoarele deturaie, cum ar fi taogeneratoarele, traductoarele digitale de poziie, se utilizeaz pentru a obineinformaii asupra turaiei motorului de acionare. +cestea influeneaz fiabilitatea sistemului de reglare,n special n cazul utilizrii n medii necorespunztoare i reduc avanta$ele sistemului de acionare.Pentru a elimina aceste traductoare se pot folosi metode de estimare a turaiei mainii asincrone. @nadintre aceste metode utilizeaz estimarea vitezei ungiulare de alunecare din tensiunile i cureniistatorici, dar ea introduce erori mari n estimarea turaiei. I alt metod utilizeaz modelul matematic
bifazat al mainii asincrone, care introduce erori n cazul turaiilor mici i obinerea unor valoriincorecte n regim staionar.
&n ultimul timp, sa ncercat aplicarea algoritmului filtrului Malman pentru estimarea vitezeiungiulare a rotorului. +ceast metod d rezultatele dorite, fr a introduce erori n estimarea turaiei,ns poate fi implementat numai n cazul sistemelor de reglare realizate cu microprocesor sau procesorde semnal.
VII#2#1# E,'(/&.*& '%.&9(*( *
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
49/62
Sisteme de reglare vectorial ale mainilor asincrone
n fig.>&&.(- se prezint scema unui sistem de acionare cu orientare dup fluul rotoric, lacare turaia este estimat pe baza modelului paralel. locul ECstimator de turaieE calculeaz vitezaungiular a rotorului i viteza ungiular de alunecare pe baza valorilor de intrare eprimate n
sistem de referin orientat dup fluul rotoric.Datorit faptului c integrarea ecuaiilor de funcionare introduce erori, se definete fazorulcurentului de magnetizare modificat, (=/., care conduce la determinarea cu mai mare precizie acomponentelor dup cele dou ae de coordonate a curentului statoric. ntre fazorul curentului demagnetizare i cel al curentului de magnetizare modificat se poate scrie urmtoarea relaie#
&ig%7''%12% Scema model!l!i +aralel de reglare ada+tiva
&ig%7''%13% Sistem de ac>ionare r trad!ctor de t!ra>ie
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
50/62
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
51/62
Sisteme de reglare vectorial ale mainilor asincrone
+
=
r
sq
r
sd
r
mrq
mrd
mrqest
mrdest
rrestmr
restmrr
rrestmr
restrmr
mrq
mrd
mrqest
mrdest
i
i
:
i
i
ii
:
:
::
::
i
i
i
i
(
A()'88
)'A(88
A(A(
A(A(
E
E
E
E
'>&&.*()
relaii n care intervine i valoarea estimat a vitezei ungiulare a rotorului, rest.Datorit faptului c sistemul de reglare se bazeaz pe principiul orientrii dup fluul
rotoric, valoarea vitezei ungiulare a fazorului curentului de magnetizare este#
mr rest sq
r r
r sd
ri
:
: i= +
+( '>&&.**)
deoarece componenta dup aa 6ra curentului de magnetizare este nul 'imrd&&.*/)
+lgoritmul de estimare a turaiei se realizeaz pe baza ecuaiei#
( )[{ ( )
( )
++
++=
dtii:
ii9
mrdesqmrq
r
t
mrdestmrdrestmrrestrest
EE
8
EE
(
)8'
'>&&.*1)
n care#rest'8) valoarea iniial a turaiei estimate# coeficient de proporionalitate.
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
52/62
Sisteme de reglare vectorial ale mainilor asincrone
+ceast ecuaie esteimplementat sub forma scemeidin fig. >&&.(3 n care vitezaestimat de alunecare slest&&.*4)
relaiile de recuren pentru mrimea de stare fiind#
'P):R'P)uaR'P)'P)aR'P)(
aR'P)a
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
53/62
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
54/62
Sisteme de reglare vectorial ale mainilor asincrone
A)(R)UP'()B'(M'V&&&.(4 '=D reprezint circuitul de decuplare a tensiunilor iar S>PG! circuitul caredetermin succesiunea de comand pentru invertor).
A N E E
A#I# L(,'& ,(/ionare c! estimarea t!ra>iei +e ba*a iltr!l!i Oalman e.tins
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
55/62
Sisteme de reglare vectorial ale mainilor asincrone
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
56/62
Sisteme de reglare vectorial ale mainilor asincrone
>?&>?&
/>?/
.>?.
,>?,
*&
&>$
>?0(//
(/.
(/.>(/.?(/,
(&.(&.>(&.?
(/.
(/,@*$(..
(..>(..?
(.>(.?
(
,
.
(,&>(,(,$(&,
(&,>(&,?(/,
(/,>(/,?
(.,
(.,>(.,?
(,,
aele sistemului de referin staionar% aele sistemului de referin sincron general% aele sistemului de referin sincron cu fluul de magnetizare% aele sistemului de referin sincron cu fluul rotoric%
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
57/62
Sisteme de reglare vectorial ale mainilor asincrone
aele sistemului de referin sincron cu fluul statoric% fazorul spaial al tensiunii electromotoare% mrimile trifazate ale unui sistem generalizat% fazorul spaial al unui sistem trifazat generalizat% componentele fazorului spaial generalizat n sistem bifazat%
componenta omopolar a fazorului spaial generalizat% curentul de magnetizare eprimat n sistem de referin orientat dup fluul demagnetizare% curentul de magnetizare rotoric eprimat n sistem de referin orientat dup fluul rotoric% componentele curentului de magnetizare rotoric n sistem de referin staionar% curentul de magnetizare statoric eprimat n sistem de referin orientat dup fluulstatoric% fazorul spaial al curentului rotoric n sistem de referin rectangular general% componentele curenilor rotorici n sistem de referin rectangular general% fazorul spaial al curentului rotoric n sistem de referin rectangular orientat dup fluul demagnetizare%
termenul de decuplare a componentei dup aa d
m
a curentului statoric% fazorul spaial al curentului rotoric n sistem de referin rectangular orientat dup fluulrotoric% componentele curenilor rotorici n sistem de referin rectangular orientat dup fluulrotoric% componentele curenilor rotorici n sistem de referin staionar% fazorul spaial al curentului rotoric n sistem de referin rectangular orientat dup fluulstatoric% valorile instantanee ale curenilor statorici% fazorul spaial al curentului statoric n sistem de referin rectangular general% componentele curenilor statorici n sistem de referin rectangular general%
fazorul spaial al curentului statoric n sistem de referin rectangular orientat dup fluulde magnetizare% componentele curenilor statorici n sistem de referin rectangular orientat dup fluul demagnetizare% fazorul spaial al curentului statoric n sistem de referin rectangular orientat dup fluulrotoric% componentele curenilor statorici n sistem de referin rectangular orientat dup fluulrotoric% fazorul spaial al curentului statoric n sistem de referin rectangular orientat dup fluulstatoric%
(,,>(,,?
(,> (,?(,,@*$
LFL/
L,>L.L=,>L=.
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
58/62
Sisteme de reglare vectorial ale mainilor asincrone
P
R,>R.'*',
T,>T.T=,>T=.%%,.
%/,@*$>%/,?@*$
%.,@*$>%.,?@*$
%,,@*$>%,,?@*$
%,&>%,%,$%&,%&,>%&,?
%/,
%/,>%/,?
%.,
%.,>%.,?
%
,
,
%,,>%,,?
%,> %,?.,/
.
,&>,,$
componentele curenilor statorici n sistem de referin rectangular orientat dup fluulstatoric% componentele curenilor statorici n sistem de referin staionar% termenul de decuplare a componentei dup aa dsa curentului statoric% momentul de inerie%
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
59/62
Sisteme de reglare vectorial ale mainilor asincrone
inductivitate de filtrare% inductivitatea de magnetizare% inductivitatea proprie a statorului, respectiv rotorului% inductivitatea tranzitorie a statorului, respectiv rotorului% numrul de pereci de poli%
dAdtoperator diferenial% rezistena pe faz a statorului, respectiv rotorului% cuplul electromagnetic% cuplul static% constanta de timp a statorului, respectiv rotorului% constanta de timp tranzitorie a statorului, respectiv rotorului% valoarea instantanee a tensiunii de la ieirea redresorului%fazorul spaial al tensiunii rotorice n sistem de referin orientat dup fluul statoric%componentele tensiunii statorice a circuitului de decuplare n sistem de referin orientatdup fluul de magnetizare%componentele tensiunii statorice a circuitului de decuplare n sistem de referin orientat
dup fluul rotoric%componentele tensiunii statorice a circuitului de decuplare n sistem de referin orientatdup fluul statoric% valorile instantanee ale tensiunilor statorice eprimate n sistem trifazat% fazorul spaial al tensiunii statorice n sistem de referin rectangular general% componentele tensiunii statorice n sistem de referin rectangular general% fazorul spaial al tensiunii statorice n sistem de referin rectangular orientat dup fluulde magnetizare% componentele tensiunii statorice n sistem de referin rectangular orientat dup fluul demagnetizare% fazorul spaial al tensiunii statorice n sistem de referin rectangular orientat dup fluul
rotoric% componentele tensiunii statorice n sistem de referin rectangular orientat dup fluulrotoric% fazorul spaial al tensiunii statorice n sistem de referin rectangular orientat dupfluul statoric%
componentele tensiunii statorice n sistem de referin rectangular orientat dup fluulstatoric% componentele tensiunii statorice n sistem de referin staionar% ungiul dintre fazorul fluului rotoric i aa d a sistemului de referin staionar% ungiul dintre fazorul fluului statoric i aa d a sistemului de referin staionar% ungiul dintre fazorul fluului de magnetizare i aa d a sistemului de referin staionar%
factor de dispersie rezultant% factor de dispersie al rotorului% valorile instantanee ale fluului statoric eprimate n sistem trifazat%
&,&,>&,?
,,
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
60/62
Sisteme de reglare vectorial ale mainilor asincrone
,
,> ,?&.
&.>&.?
.
.
.
.> .?/&>//$
&/
//
/
/> /?.>,
//&/./,,).&
.,)
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
61/62
Sisteme de reglare vectorial ale mainilor asincrone
fazorul spaial al fluului statoric n sistem de referin rectangular general% componentele fluului statoric n sistem de referin rectangular general% fazorul spaial al fluului statoric n sistem de referin rectangular orientat dup fluulstatoric% modulul fluului statoric n sistem de referin rectangular orientat dup fluul statoric%
componentele fluului statoric n sistem de referin staionar% fazorul spaial al fluului rotoric n sistem de referin rectangular general% componentele fluului rotoric n sistem de referin rectangular general% fazorul spaial al fluului rotoric n sistem de referin rectangular orientat dup fluulrotoric% modulul fluului rotoric n sistem de referin rectangular orientat dup fluul rotoric% componentele fluului rotoric n sistem de referin staionar% valorile instantanee ale fluului de magnetizare eprimate n sistem trifazat% fazorul spaial al fluului de magnetizare n sistem de referin rectangular general% fazorul spaial al fluului de magnetizare n sistem de referin rectangular orientat dupfluul de magnetizare%
modulul fluului de magnetizare n sistem de referin rectangular orientat dup fluul demagnetizare% componentele fluului de magnetizare n sistem de referin staionar% fluul de scpri din rotor, respectiv din stator% viteza ungiular a sistemului de referin orientat dup fluul de magnetizare% viteza ungiular a sistemului de referin general% viteza ungiular a sistemului de referin orientat dup fluul rotoric% viteza ungiular a sistemului de referin orientat dup fluul statoric% viteza ungiular de alunecare% viteza ungiular a rotorului% viteza ungiular cu care se rotete vectorul fluului fa de aa d a a sistemului de
referin% ungiul intern al rotorului% ungiul corespunztor vitezei ungiulare de alunecare.
-
8/12/2019 Sisteme de Reglare Vectoriala Ale Masinilor Asincrone
62/62
Sisteme de reglare vectorial ale mainilor asincrone
Powered by http://www.referat.ro/
cel mai tare site cu referate
http://www.referat.ro/http://www.referat.ro/