RI Lucrare6
14
Lucrarea 6 Dezvoltarea de aplicaţii pentru setarea, citirea şi testarea senzorilor din structura standard a robotului NXT
description
DocLucrare
Transcript of RI Lucrare6

Lucrarea 6
Dezvoltarea de aplicaţii pentru setarea, citirea şi testarea senzorilor din structura
standard a robotului NXT

În lucrare studentul va realiza:Testarea senzorilor, rulând interfaţa grafică de pe calculatorul gazdăScrierea de aplicatii pentru testareasenzorului de lumină în diverse condiţii de funcţionareScrierea de aplicaţii pentru testarea senzorului de ultrasunete în diverse condiţiiScrierea de aplicaţii pentru testarea senzorului de sunete în diverse condiţii

Testarea preliminară a senzorilor, pe calculatorul gazdă

Citirea senzorilor de către unitatea de comandă a kit-ului NXT folosind limbajul NXC
Structura generală a unei aplicaţii pentru citirea senzorilor este urmatoarea:
se setează tipul senzorului conectat la un anumit port şi modul său de lucruse setează modul de reprezentare a ieşirii senzorului respectivse citeşte ieşirea senzorului

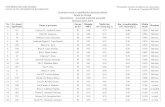
APLICAŢIA 1. Să se citească valoarea indicată de senzorul de lumină atunci când a fost orientat către diverse culori. Plasat deasupra unor suprafeţe de culori diferite şi cu reflexii diferite senzorul de lumină detectează diferite tonuri de gri, după cum se poate vedea şi din figura urmatoare.
Pentru citiri cât mai precise trebuie ca fiecare caracteristică a suprafeţei: reflexie, distanţă, culoare, ce influenţează răspunsul primit de la senzorul de lumină, să fie analizată separat. Se vor nota valorile furnizate de senzor pentru cazul în care se variază o singură caracteristică, după cum urmează:
- suprafeţe de culori diferite - suprafeţe de texturi variate (rugoase, lucioase)- distanţe variate pentru citirea aceleaşi suprafeţe.
Pentru o suprafaţă aleasă să se compare valorile citite atunci când senzorul este activ (LED aprins), respectiv inactiv (LED stins). Se urmăresc în paralel atât valorile afişate pe display-ul NXT cât şi cele afişate în fereastra Watching the brick.

APLICAŢIA 2.
Să se analizeze şi alte moduri de interpretare a informaţiei (BOOL, EDGE, PULSE, PERCENT. Citirile valorilor indicate de senzorul de lumină se afişează pe display.

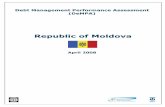
APLICAŢIA 3. Se consideră un traseu marcat printr-o bandă de culoare neagră pe o suprafaţă albă, prezentat în figura urmatoare:
Un senzor de lumină plasat deasupra traseului poate detecta diferite tonuri de gri în funcţie de distanţa de la centrul traseului (negru) către exterior (alb). Determinaţi cu aproximaţie forma de variaţie a valorii citite de la senzor în funcţie de distanţa dintre centrul senzorului şi linia mediană a traseului.

APLICAŢIA 4.
Pentru senzorul de ultrasunete să se seteze corect tipul senzorului şi portul la care este conectat. Să se citească senzorul utilizând toate modurile de interpretare a datelor şi să se afişeze valorile pe display.
Observaţie: În cazul senzorului de ultrasunete, pentru citirea valorilor acestuia se foloseşte o funcţie specială SensorUS(), diferită de funcţia Sensor(), folosită pentru toţi ceilalţi senzori.

APLICAŢIA 5.
Să se determine distanţa minimă şi maximă pe care o poate detecta senzorul de ultrasunet. Determinaţi caracteristica senzorului (valoarea dată de senzor în funcţie de distanţa faţă de obiect). Precizaţi în ce gamă caracteristica este liniară.

APLICAŢIA 6.
Să se determine lărgimea “zonei de detecţie”(deschiderea unghiulară maximă) în care senzorul de ultrasunet poate detecta obiecte. Pentru aceasta plasaţi obiectul lateral faţă de senzor (la 90o faţă de direcţia de orientare a senzorului (axa oy) şi deplasati-l pe un arc de cerc
2maxθ
maxθ

APLICAŢIA 7.
Verificaţi dacă sensibilitatea senzorului de ultrasunete se modifică atunci când obiectul se află în mişcare pe o direcţie perpendiculară pe axa oy a senzorului.

Testarea senzorului tactil
APLICAŢIA 8. Să se seteze corect tipul senzorului şi portul la care este conectat. Să se citească senzorul pentru următoarele moduri de interpretare a informaţiei: RAW, BOOL, EDGE, PULSE.

APLICAŢIA 9. Să se testeze senzorul în modul: RAW şi PERCENT, pentru bătut din palme şi comandă verbală, cu voce la nivel normal de intensitate.
Testarea senzorului de sunet

APLICAŢIA 10.
Robotul mobil, echipat cu două roţi motoare conectate la porturile de ieşire ale brick-ului NXT, identificate prin literele B şi C, este dotat cu un senzor de sunet conectat la unul dintre porturile de intrare ale acestuia. Prin program se citeşte într-o variabilă intensitatea sunetului, şi se transmite ca putere celor două motoare ale robotului. Se rotescambele motoare înainte cu o putere proporţională cu intensitatea sunetului.









![asigur`, prin facult`]ile sale, calific`ri [i competen]e ... · asigur`, prin facult`]ile sale, calific`ri [i competen]e în urm`toarele specializ`ri: Agricultură – INGINER Silvicultură](https://static.fdocumente.com/doc/165x107/5d59bdf088c993f3188b8900/asigur-prin-facultile-sale-calificri-i-competene-asigur-prin-facultile.jpg)