RI Lucrare4
7
Lucrarea 4 Construirea unui braţ de robot cu două grade de libertate (robot SCARA) şi realizarea controlului acestuia pentru a atinge diverse puncte dintr-un plan
description
Lucrare
Transcript of RI Lucrare4

Lucrarea 4
Construirea unui braţ de robot cu două grade de libertate (robot SCARA) şi
realizarea controlului acestuia pentru a atinge diverse puncte dintr-un plan

Lucrarea are drept scop construirea unui robot braţ articulat – robot SCARA şi scrierea unui program prin care elementul terminal al braţului să atingă puncte de coordonate date, din planul spaţiului de lucru.
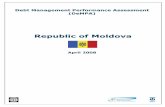
Fig.4.1 Exemplificarea structuri unui robot cu articulaţii rotative - SCARA

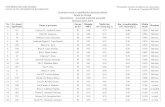
Calculul unghiurilor de control al braţului robotului
1l
2l
1θ
2θ
x
y
iyir
ixθ
),( ii yxA
Fig.4.2 Reprezentarea geometrică a modelului braţului robotului SCARA
Cerinta:Se vor determina unghiurile de control: 21, θθ

APLICAŢIA 1. Dezvoltarea structurii de robot SCARA
Paşii de urmat:Se va construi un braţ de robot alcătuit din cele două elemente mobile, articulate, acţionate separat de câte un motor NXT
1) Se stabilesc originea şi cele două axe ale sistemului de coordonate;2) Orientarea braţului robotului se va realiza în plan;3) Se alege poziţia iniţială, de start, a braţului robotului;

APLICAŢIA 3. Realizarea unui manipulator
Indicaţie: Unghiurile de rotaţie ale celor două motoare trebuie calculate considerând o poziţie iniţială cunoscută a elementelor braţului. Pentru simplificarea calculelor, se poate alege o poziţie convenabilă – de exemplu elementele braţului să fie în prelungire şi în lungul axei OX sau OY.
Considerând modelul cinematic al sistemului, se va concepe programul care să permită realizarea pozitionării braţului robotului SCARA în sistemul (XOY).
Notă: Pentru calculul funcţiei arccos(), în limbajul NXC este predefinită funcţia Acos(), care primeşte argument in intervalul [-100, 100], şi nu [-1, 1]. Pentru a o utiliza corect, este necesar ca argumentul rezultat din calcule în intervalul [-1, 1] să fie înmulţit cu 100 înainte de a fi utilizat în funcţia Acos() din NXC. Exemplu:
argument = expresie(x,y);theta1=Acos(100*argument))

APLICAŢIA 2. Testarea programului pentru diverse puncte din raza de acţiune a robotului
Testarea programului: Pentru fiecare punct de coordonate xi,yi dorit (ţinta de atins), se compară coordonatele atinse cu cele dorite.
Cerinţe:Cât de precisă este poziţionarea realizată? Explicaţi cauzele posibile generatoare de erori.

APLICAŢIA 3. Atingerea unei serii de puncte
Completaţi programul pentru ca robotul să primească o serie de coordonate impuse, pe care să le atingă succesiv.


![Mihail, Nicolae-Paul - Femeia Cibernetica v1.0 [RI]](https://static.fdocumente.com/doc/165x107/557202e54979599169a441cb/mihail-nicolae-paul-femeia-cibernetica-v10-ri.jpg)