Proiectarea Un Sistem de Actionare Pentru Un Ascensor de Persoane de Mare Viteza
36
PROIECT SISTEME ELECTROMECANICE
-
Upload
andrei-ghita -
Category
Documents
-
view
27 -
download
1
description
ssfsssfdsfsfds
Transcript of Proiectarea Un Sistem de Actionare Pentru Un Ascensor de Persoane de Mare Viteza

PROIECT SISTEME ELECTROMECANICE

TEMA DE PROIECTARE
Se va proiecta un sistem de actionare (SAE) pentru un ascensor de persoane de mare viteza situat intr-un imobil public avand urmatoarele date:
in care:sgr – numarul subgrupei: 1 ;2 ; 3 n – numarul de ordine afectat studentului {1 ; 18}.
Ciclul tipic al ascensorului este descris de statiile de oprire si numarul de persoane care raman in ascensor intre doua statii. Tabelul de mai jos contine etajele la care se afla statiile ciclului, Ne si numarul de persoane Np dintre statii.
Statia Np Ne10 10
Parter 10 0Statia 1 -2 2Statia 2 -2 6Statia 3 -6 10Parter 0 0
Dimensiunile si masa cabinei sunt date in tabelul de mai jos:
Np a b h Masa [kg]10 1400 1400 2100 700
a – latimea frontala spre usi, Inaltimea palierului cladirii: 4mb – adancimea cabinei, Timp de stationare in statii: 10 secundeh – inaltimea ei. Timp de stationare la parter: 20 secunde
Proiectul va contine:
1. Calculul mecanic strict necesar schemei cinematice;2. Diagramele de drum pentru un ciclu tipic complet;3. Diagramele de momente ;4. Calculul cuplului echivalent ;5. Alegerea motorului de actionare si verificarea lui;6. Alegerea convertorului bidirectionalcu curenti de circulatie si dimensionarea bobinelor de filtrare-limitare a curentiilor de circulatie ;7. Schema de forta ;8. Schema de reglare si simularea functionarii ei.
1

NOŢIUNI INTRODUCTIVE
Schema de principiu:Ascensoarele sunt instalaţii de transport pe verticală a persoanelor şi materialelor.
Cabinele de transport pentru persoane sau platformele special construite pentru materiale sunt ghidate în mişcarea lor de glisiere dispuse lateral, pe ambele părţi ale dispozitivului de transport şi a contragreutăţii. Energia mecanică necesară transportului pe verticală poate fi asigurată prin dispozitive hidraulice, sau printr-un sistem de acţionare electrică destinat conversiei electromecanice a energiei şi controlului conversiei şi mişcării. Subiectul prezentului îndrumar de proiectare este ascensorul electric
Schema cinematică a unui ascensor "clasic", cu sală a maşinii de acţionare şi reductor plasat între roata de fricţiune şi motor este prezentată în Fig 1.1. Modificările efectuate pentru a elimina spaţiul sălii maşinii nu afectează esenţa schemei cinematice, adica acţionarea cu roată de fricţiune şi contragreutate, faptul că toate masele în mişcare au aceeaşi viteză liniară. Atât în timpul deplasării cât şi al staţionării ascensoarele trebuie să asigure protecţia persoanelor sau a materialelor transportate. Persoanele transportate sunt protejate de cabine care circulă într-un puţ construit special pentru adăpostirea ascensorului. Forţa de tracţiune este asigurată de o roată de fricţiune pe care sunt dispuse mai multe cabluri în paralel. Acestea sunt fixate la un capăt de partea superioară a cabinei, iar la capătul opus de partea superioară a contragreutăţii. În general, pentru un număr de etaje mediu, 20-30, nu există un cablu de egalizare a sarcinii dispus între partea inferioară a cabinei şi partea inferioară a contragreutăţii. Acţionarea roţii de fricţiune (RF) se face de către un motor electric prin intermediul unui reductor cu melc şi roată melcată cere permite mişcarea cabinei numai din spre motor (cabina suspendată prin cablurile de tracţiune nu ar trebui să se deplaseze în cazul de avarie al motorului electric nealimentat).
Accesul de la cabină spre palierul staţiei de destinaţie (sau în sens invers, de la palier spre cabină) se face prin uşa de acces a cabinei şi prin uşa metalică a puţului ascensorului spre palier. Ambele uşi au contacte de sesizare a poziţiei închis-deschis, iar uşa metalică dintre palier şi puţ are şi un zăvor care împiedecă accesul persoanelor spre puţ dacă ascensorul nu s-a oprit la palierul respectiv, când zăvorul este deschis. Oprirea cabinei în dreptul uşii este asigurată de sistemul de comandă care corespunde structural unui sistem de poziţionare. Pentru protecţia persoanelor şi a încărcăturii sunt prevăzute numeroase dispozitive de siguranţă a căror bună funcţionare este verificată şi controlată în permanenţă.
Comanda dată ascensorului se execută numai dacă avem confirmarea că toate uşile sunt închise, toate zăvoarele sunt în poziţie închis, cabina se găseşte în faţa uşii unui palier şi dacă în cazul comenzii emise din cabină contactul de podea este închis, adică există realmente în cabină o persoană care poate comanda liftul. Dacă la coborâre viteza cabinei depăşeşte viteza maximă cu mai mult de 40%, se declanşează sistemul de frânare-oprire a cabinei: între glisieră şi dispozitivul de ghidare al cabinei se inserează mecanic (se presupune că sistemul de comandă electrică este în avarie) pene de frânare cu efort progresiv. Dacă glisiera, penele şi ghidajul cabinei rezistă, cabina se opreşte din căderea liberă. Pentru ascensoarele aşezate deasupra unor spaţii circulate (din motive de securitate a persoanelor vizate), se prevede în mod obligatoriu şi pentru contragreutate acelaşi sistem de limitare a vitezei şi oprire. Pentru oprirea cabinei atunci când se depăşesc
2

staţiile extreme se introduc contacte limitatoare de cursă. Amănunte suplimentare despre caietul de sarcini al comenzii ascensorului vor fi furnizate la sfârşit, când va exista o vedere de ansamblu completată de partea de forţă şi reglare a sistemului de acţionare electrică.
1. CALCULUL MECANIC STRICT NECESAR SCHEMEI CINEMATICE
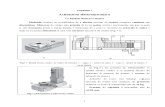
În Fig.1.2. sunt prezentate numai acele părţi ale schemei cinematice care contribuie la alegerea motorului de acţionare:
Fig.2. Bilanţ de forţe in schema cinematică
Au fost utilizate notaţiile:ME – Motorul electric de acţionare (motor de c.c. în cazul enunţului dat),T - Transmisie mecanică (reductorul de viteză melc-roată melcată),RF – Roata de fricţiune,RCL - Roata de conducere liberă,Mc – Masa cabinei,Gc – Greutatea cabinei, Gc Mcg, g - Acceleraţia gravitaţională, g 10ms-2,QN – Masa persoanelor corespunzătoare încărcăturii nominale,Q - Masa persoanelor aflate în cabină la un moment oarecare,Mcg – Masa contragreutăţii,Ff – Forţa de frecare echivalentă calculată din randamentul puţului,
3

T1,2 – Tensiunile din fir,(+), v, am – Sens pozitiv de mişcare, viteză de deplasare şi acceleraţie maximă,Ft – Forţa de tracţiune dezvoltată de roata de fricţiune.
1.1 Determinarea masei contragreutăţii Mcg:
Am ales ke=0.5ke este un coeficient de echilibrare care se află în mod normal între limitele ke 0.4 ÷ 0.6. Np este numărul de persoane prevăzut în enunţ,Mp este masa unei persoane, Mp = 70kg.
1.2 Determinarea forţei de frecare echivalente:
Se consideră randamentul puţului definit cu ajutorul forţei de tracţiune ideală şi a forţei echivalente de frecare. Deoarece forţa de frecare nu apare numai la cabină, dar nici nu cunoaştem distribuirea ei se va considera că forţa de frecare echivalentă se împarte în mod egal între cabină şi contragreutate. Atunci avem:
Forţa de tracţiune ideală dezvoltată de roata de fricţiune în timpul deplasării în sus cu cabina încărcată la maximum şi viteză constantă este:
Randamentul puţului de ascensor este destul de redus, p 0.85 ÷ 0.9, asadar alegem p=0.9.Se poate scrie succesiv:
1.3 Determinarea diametrului cablului de tractiune:
Având valoarea forţei de frecare se poate calcula tensiunea maximă din cablurile aflate între roata de fricţiune şi cabină:
Tensiunea maximă se distribuie pe ncp cabluri legate în paralel. De regulă ncp 3. Numărul cablurilor în paralel influenţează construcţia coroanei roţii de fricţiune, aşa că recomandările trebuie respectate în general. În acest caz sarcina teoretică maximă dintr-un cablu este:
4

Această sarcină maximă se înmulţeşte cu un coeficient de siguranţă pentru a calcula efortul de dimensionare a cablului. În transportul de persoane se iau masuri severe de siguranţă aşa că acest coeficient de siguranţă este la prima vedere exagerat: ksig 15.
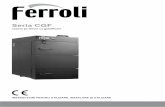
În tabelul de mai jos sunt extrase din cataloagele de cabluri coloanele ce prezintă interes pentru dimensionarea lanţului cinematic. Cablul ales este alcătuit din 6 toroane a câte 19 fire de oţel fiecare. Între cele 6 toroane răsucite se află un material textil capabil să reţină substanţele lubrifiante utilizate la întreţinerea cablurilor.
Fig.3 Sectiunea unui cablu cu 6 toroane a cate 19 fire.
Pk daN d mm m1
kgm
1710 6,5 0,14
2680 7,5 0,22
3860 9 0,30
5280 11 0,42
7740 13 0,62
12300 17 1,04
15500 19 1,25
21000 21 1,70
24000 23 1,98
27500 25 2,22
Fig.4 Secţiunea unui cablu cu 6 toroane a cate 19 fire
Cablul se va alege astfel ca Acum se poate calcula masa totală a cablului:
5

În relaţia de mai sus Hp este înălţimea unui palier din imobilul în care se instalează ascensorul. (Hp=4m)
Fiind un imobil public, putem considera Hp 4m. Pe lângă lungimea necesară acoperirii celor Ne etaje, se consideră că în camera liftului şi în spaţiile de siguranţă mai sunt necesari lsupl metri cablu. Se ia de regulă lsupl 8 10m si se alege lsupl=9 [m].
1.4 Dimensionarea RF:
Fig.5. Dimensiunile principale ale roţii de fricţiune şi a roţii de conducere liberă
In Fig.5. este prezentată coroana roţii de fricţiune şi formele posibile ale restului de părţi componente. Coroana roţii de fricţiune are o formă specială pentru a asigura suprafaţa de contact maximă dintre cablu şi coroană pe toată durata de funcţionare, chiar atunci când cablul prezintă o uzură admisibilă. Materialul coroanei este astfel ales încât coeficientul de frecare dintre materialul cablului (oţel) şi materialul coroanei să fie maxim posibil.
Diametrul roţii de fricţiune DRF este ales astfel încât să asigure o bună aşezare a cablului cu diametrul d în canalul său. Se recomandă ca acest diametru să fie
2. DIAGRAMELE DE DRUM PENTRU UN CICLU TIPIC DE FUNCŢIONARE COMPLET
Diagramele de drum sau graficele de mişcare reprezintă variaţia unor mărimi funcţionale în funcţie de drum pentru un ciclu tipic de funcţionare al ascensorului:
6

Ele au forme de variaţie specifice maşinii de lucru acţionate. În continuare ne vom ocupa de modul de elaborare a diagramelor de drum pentru ascensorul de mare viteză pe care-l proiectăm. Considerăm că informaţiile cuprinse în enunţul temei ne ajută să definim ciclul tipic de funcţionare al ascensorului.
Pentru a asigura confortul necesar, în transportul de persoane se limitează variaţia acceleraţiei la valori pe care experienţa şi cercetarea medicală le recomandă. Definim şocul drept derivata acceleraţiei şi îl notăm cu ρ:
În aceste condiţii variaţia acceleraţiei şi a vitezei între două staţii suficient de
îndepărtate arată ca în Fig.2.1:
Capitolul 2Fig.2.1. Cele şapte etape ale unei "interstaţii lungi"
Se observă că un parcurs în care se atinge viteza maximă are 7 etape distincte, urmate de pauza dictată de oprirea în staţie. În cele ce urmează vom scrie legile evoluţiei şocului, acceleraţiei, vitezei şi deplasării pe verticală în fiecare etapă, precum şi valorile finale care sunt de fapt valorile iniţiale pentru etapa următoare.Să considerăm impuse prin datele de proiectare
- Şocul ρ0,- Acceleraţia maximă am,- Viteza maximă vm
Sistemul de acţionare al ascensorului este un sistem de poziţionare, cabina plecând dintr-un punct bine determinat, (nivelul etajului de start) şi trebuind să oprească exact în faţa uşii nivelului ţintă (nivelul etajului de oprire). Eroarea de poziţionare nu poate fi mai mare de câţiva mm, ceea ce la o cursă de zece etaje înseamnă o eroare inferioară limitei de 0,5%!
7

Într-un sistem de poziţionare este foarte important profilul vitezei pentru o cursă, deoarece el asigură pe de-o parte comfortul clienţilor, iar pe de altă parte impune sarcini clare sistemului de acţionare şi comandă.
Două mărimi care determină profilul de viteză: acceleraţia maximă (notată în continuare am) şi valoarea limită a derivatei acceleraţiei, şocul (notat în continuare ρ). Variaţia în timp a şocului, acceleraţiei, vitezei, distanţei parcurse, a cuplului motor necesar, constituie diagramele de drum sau graficele de mişcare ale ascensorului studiat.
Un parcurs în care se atinge viteza maximă are 7 etape distincte, urmate de pauza dictată de oprirea în staţie.
În cele ce urmează vom scrie legile evoluţiei şocului, acceleraţiei, vitezei şi deplasării pe verticală în fiecare etapă, precum şi valorile finale ale valorilor funcţionale.
La chemarea cabinei se poate calcula lungimea cursei impuse y*: unde H este înălţimea palierului clădirii.
Legile generale care guvernează evoluţia mărimilor în diversele etape sunt:
Plecarea cabinei din staţia iniţială se face cu condiţii iniţiale nule pentru
acceleraţie, viteză şi spaţiu. Mărimea care determină în bună parte evoluţia cabinei este şocul ρ. Dacă lungimea cursei impuse y* este mai mare decât dublul spaţiului necesar y3
pentru atingerea vitezei maxime, atunci cursa cabinei va avea 7 etape până la oprire aşa cum se poate vedea în Fig.2.1
Tabelul de mai jos oferă sinteza informaţiilor despre mişcarea cabinei în acest caz. După comentariile finale despre acest tip de cursă, vom arăta cum se rezolvă problema şi în cazul în care y* este mai mic decât dublul spaţiului necesar pentru atingerea vitezei maxime. Diagrama de drum a vitezei este simetrică. Etapele 1, 2, 3 se vor repeta "în oglindă" în etapele 7, 6, 5. Cea mai bună dovadă este compararea drumului parcurs în etapele simetrice 1-7, 2-6, 3-5.
Tabelul de mai jos cuprinde evolutia vitezei si acceleratiei pentru cazul in care liftul urca de la parter la etajul maxim al cladirii fara statii intermediare.
Tabel 2.1. Prezentarea sintetica a diagramelor de drum pentru o interstatie tipica:
Etapa 1ρ Valori iniţiale Evoluţie Durata Valori finale
8

etapeiρ0
01
mat
Etapa 20
Etapa 3ρ
Etapa 4
0
Etapa 5-ρ0
Etapa 6
9

0
Etapa 7ρ0
Cu aceste observaţii pot fi trasate diagramele de drum pentru un ciclu tipic complet descris în caietul de sarcini. Acest ciclu tipic serveşte drept bază pentru calculele de alegere a motorului de antrenare care poate asigura diagramele de drum impuse de cazul studiat.
Înţelegem prin "ciclu tipic" suma curselor probabile care se repetă periodic
intr-un interval de utilizare maximă a ascensorului. La proiectarea imobilului se cunoaşte destinaţia aproximativă a spaţiilor de la fiecare nivel. Se estimează un flux de pasageri şi repartiţia acestui flux pe durata zilei de lucru. Dacă există un imobil similar, datele legate de trafic sunt mai reale, ele pot fi culese prin observaţii la faţa locului.
Tabel 3. Calculul in cazul unei interstatii “scurte”
Etapa 1ρ Valori iniţiale Evoluţie Durata
etapeiValori finale
10

ρ0
Etapa 20
Etapa 3-ρ0
Tabelul arată că viteza v2 este necunoscuta care poate fi determinată din ecuaţia de gradul II de mai jos:
Se alege soluţia pozitivă:
Cu aceste observaţii pot fi trasate diagramele de drum pentru un ciclu tipic complet descris în caietul de sarcini.
Marimile calculate si diagramele de drum pentru fiecare interstatie in parte:
Interstatia 1: parter – etajul II:
t1=0.482s; v1=0.477m/s; y1=0.077m; t2=1.302s; v2=3.055m/s; y2=2.375.m; t3=0.482s; v3=3.531m/s; y3=4m; t4=0s; v4=5.5m/s; y4=0m;
11

Interstatia 2: etajul II – etajul VI:
t1=0.482s; v1=0.477m/s; y1=0.077m; t2=2.13s; v2=4.695m/s; y2=5.585m; t3=0.482s; v3=5.172m/s; y3=8m; t4=0s; v4=5.5m/s; y4=0m;
12

Interstaţia 3: etajul VI – etajul X:
t1=0.482s; v1=0.477m/s; y1=0.077m; t2=2.13s; v2=4.695m/s; y2=5.585m; t3=0.482s; v3=5.172m/s; y3=8m; t4=0s; v4=5.6m/s; y4=0m;
Interstaţia 4: etajul X – parter:
t1=0.482s; v1=0.477m/s; y1=0.077m; t2=2.296s; v2=5.023m/s; y2=6.391m; t3=0.482s; v3=5.5m/s; y3=8.964m; t4=4.013.s; v4=5.5m/s; y4=22.073m;
13

3. DIAGRAMELE DE MOMENTE
3.1. Calculul momentelor pe fiecare interstatie in parte:
Analizând diagramele de drum ale unui ciclu tipic complet ne dăm seama că serviciul de funcţionare al motorului de antrenare este foarte departe de serviciul de lungă durată S1 pentru care a fost proiectată maşina electrică. Din acest motiv trebuie să găsim un mod de echivalare a serviciului de funcţionare real cu serviciul S1. Cea mai potrivită cale este aceea a calculării cuplului echivalent, care în cazul maşinii de c.c. funcţionând la flux constant înseamnă şi curent echivalent. Cuplul echivalent din punct de vedere termic este cuplul serviciului S1 care produce aceeaşi încălzire a motorului ca incalzirea datorata dezvoltarii cuplului real impus de diagramele de drum ale ciclului tipic complet.
Vom parcurge prin urmare etapa trasării diagramei de momente reală, după care vom calcula cuplul echivalent din punct de vedere termic cu cuplul variabil al ciclului tipic. Din ecuaţia mişcării rigidului cu axă de rotaţie deducem cuplul pe care trebuie să-l dezvolte maşina de acţionare pentru a asigura diagramele de viteză şui acceleraţie ale ciclului:
În această relaţie ms este cuplul de sarcină staţionar, iar J este momentul de inerţie al tuturor maselor aflate în mişcare de rotaţie sau translaţie. Legătura cu diagrama de drum a acceleraţiei se deduce simplu, cunoscând legătura dintre viteza tangenţială şi viteza unghiulară:
3.1.1. Calculul cuplului de sarcină staţionar
Pentru o încărcare oarecare Q la numar maxim de persoane: [kg]
Se calculează forţa de tracţiune dezvoltată de roata de fricţiune pentru o deplasare în sens pozitiv (urcare):
Cuplul de sarcină staţionar (scris cu literă majusculă corespunzătoare valorilor medii) Ms va fi:
3.1.2. Calculul momentului de inerţie echivalent
14

Se face pentru toate părţile aflate în mişcare, la axul roţii de fricţiune. Aici energia cinetică a corpului echivalent aflat în mişcare de rotaţie cu viteza unghiulară a roţii de fricţiune va fi egală cu energia cinetică a tuturor maselor aflate în mişcare de rotaţie sau translaţie.
În această sumă momentul de inerţie echivalent persoanelor aflate în cabină JQ' este schimbător, el trebuie evaluat pentru fiecare interstaţie în funcţie de numărul persoanelor aflate în cabină.
Componenta maselor constante aflate în mişcare de translaţie
Cabina, contragreutatea şi cablurile nu îşi modifică masa în timpul funcţionării. Lungimea cablurile de tracţiune se calculează în funcţie de numărul de etaje ale imobilului, la care se adaugă lungimea cablurilor din camera ascensorului l supl = 8÷10m. La masa cablurilor de tracţiune se adaugă masa cablului de comandă, iluminarea cabinei si senzori. Se propune suplimentarea numărului de cabluri cu unu, astfel că:
Acum există toate elementele necesare evaluării cuplului ce trebuie să-l dezvolte motorul de antrenare pe parcursul unui ciclu tipic complet. Pentru o interstaţie diagrama de momente arată ca în figura alăturată.
Fig. Diagrama de momente corespunzatoare intersatiei din Fig.6
Momentele si diagramele de momente pentru fiecare interstatie in parte:
15

Interstatia 1: parter – etajul II: ;
Interstatia 2: etajul II – etajul VI: ;
16

Interstaţia 3: etajul VI – etajul X: ;
17

Interstaţia 4: etajul X – parter: ;
4. CALCULUL CUPLULUI ECHIVALENT:
18

Analizând diagramele de drum ale unui ciclu tipic complet ne dăm seama că serviciul de funcţionare al motorului de antrenare este foarte departe de serviciul de lungă durată S1 pentru care a fost proiectată maşina electrică. Din acest motiv trebuie să găsim un mod de echivalare a serviciului de funcţionare real cu serviciul S1. Pierderile Joule din maşină sunt date de valoarea efectivă a curentului din indus. Dacă maşina de c.c. funcţionează la flux magnetic constant atunci curentul este direct proporţional cu cuplul electromagnetic şi vom calcula cuplul echivalent cu un procedeu similar definirii valorii efective a curentului. Cuplul echivalent din punct de vedere termic este cuplul serviciului S1 care produce aceeaşi încălzire a motorului ca incălzirea datorată dezvoltării cuplului real impus de diagramele de drum ale ciclului tipic complet.:
Prezenţa factorului α în calculul timpului se explică prin condiţiile de răcire diferite pe care le are un motor autoventilat în timpul evoluţiei cabinei între două staţii. Privind diagrama de momente pentru o interstaţie dată în Fig.3.8 ne dăm seama că integralele se pot înlocui cu sume ale unor integrale pe porţiuni în care cuplul are o variaţie simplă. Desenul pune în evidenţă două forme tipice de variaţie a cuplului: valoare constantă şi variaţie lineară.Pentru porţiunile cu variaţie lineară considerăm variaţia trapezoidală din Fig.3.9 şi scriem pentru integrala de la numărător:
Se observă posibilitatea automatizării calculelor şi sistematizarea lor sub formă tabelară. Pentru condiţiile de răcire considerăm trei situaţii caracteristice:- staţionare şi viteze scăzute (etapele 8, 1, 7 din Fig.3.3.1 ) cu α 0.3,- perioadele de accelerare şi viteze medii (etapele 2, 6 din Fig.3.3.1 ) cu α 0.65,- perioadele în care viteza este apropiată de viteza maximă(etapele 3, 4, 5 din Fig.3.3.1) cu α 1Putem rescrie relaţia de calcul a cuplului echivalent sub forma:
În relaţia de mai sus m1 este numărul intervalelor din diagrama cuplului unui ciclu tipic complet în care cuplul este constant. Numărul intervalelor cu variaţie lineară a cuplului este m2. În staţii cabina este menţinută în poziţie fixă cu frână mecanică, deci cuplul este nul la staţionare. Cu toate acestea în numărul N sunt incluse şi intervalele de staţionare când maşina se răceşte doar prin convecţie naturală (α = 0,3). După calculul cuplului echivalent Me se fac următoarele verificări:
19

- raportul dintre cuplul maxim, obţinut la încărcarea maximă şi Me nu trebuie să depăşească valoarea 2,0 – 2,5 deoarece acest raport se apropie de raportul curentului maxim şi a curentului nominal al motorului de antrenare,
- raportul dintre cuplul rezistent MS0 la încărcarea maximă şi Me ar trebui să se apropie de unitate.Din progrmul din Mathlab am scos cuplul echivalent, cuplul maxim, raportul lor
şi diagrama de moment:
5. ALEGEREA MOTORULUI DE ANTRENARE SI VERIFICEREA LUI
5.1. Alegerea motorului de antrenare:Cunoscând valoarea cuplului echivalent se calculează puterea de tip a motorului
considerând viteză nominală de rotaţie viteza unghiulară a roţii de fricţiune corespunzătoare vitezei maxime.
Această putere serveşe la alegerea motorului de antrenare indiferent de felul său (de c.c., asincron sau sincron cu magneţi permanenţi) deoarece relaţia Ptype a fost obţinută din datele impuse ascensorului, fără a particulariza raţionamentul. La alegerea motorului din cataloagele de maşini electrice se va ţine cont de specificarea din caietul de sarcini privind acţionarea directă sau cu transmisie mecanică.
Exemplificăm în continuare alegerea unui motor de c.c. şi calculul parametrilor săi, necesari pentru schema de reglare şi pentru evaluarea performanţelor acţionării. Cu puterea de tip se caută în catalogul de maşini electrice de c.c. o maşină având:
- Puterea nominală lejer superioară puterii de tip (10-15%),- Curentul maxim aproximativ dublul curentului nominal,- O viteză de rotaţie relativ scăzută pentru a avea o transmisie mecanica cu un
raport de transmisie redus.
Datele de catalog se rezumă în general la valorile următoarelor mărimi funcţionale : PN=10,2 [kW]UAN=260 [V]IAN=51[A]nN=980[rot/min]J=0,10 [kgm2]IAmax=350 [A]
- Calculăm randamentul nominal (dacă nu este dat) :
20

- Considerând pierderile Joule egale cu pierderile mecanice şi în fier estimăm rezistenţa indusului:
- Pierderile Joule nominale sunt:
- Evaluăm constanta de flux:
- Constanta electromecanică a maşinii:
- Constanta de timp a circuitului indusului:
CA = 0,03 pentru maşinile cu înfăşurare de compensaţie,CA = 0,09 pentru maşinile fără înfăşurare de compensaţie,p – numărul de perechi de poli ai maşinii,
n' – numărul de rotaţii pe secundă
5.2. Verificarea conditiilor de functionare ale motorului:
Concordanta legata de cuplul nominal al motorului si valoarea cuplului echivalent redus la arborele masinii:
Deci MN se incadreaza conform unei erori de ±10%6. ALEGEREA CONVERTORULUI BIDIRECTIONAL CU CURENTI DE
CIRCULATIE SI DIMENSIONAREA BOBINELOR DE FILTRARE-LIMITARE ACURENTILOR DE CIRCULATIE
21

Diagrama de momente a ciclului tipic complet ne arată că vom avea în permanenţă atât porţiuni cu cuplu electromagnetic pozitiv, cât şi porţiuni cu cuplu electromagnetic negativ. Prin urmare sursa de alimentare a motorului trebuie să fie bidirecţională, permiţând furnizarea curentului în ambele sensuri prin indusul maşinii fără a recurge la contactoare inversoare. Există numeroase situaţii în care schimbarea sensului curentului trebuie să se facă cu viteză mare de răspuns. Din acest motiv vom opta pentru convertoare bidirecţionale cu curenţi de circulaţie. Montajul antiparalel prezintă avantajul unei singure surse de alimentare a redresoarelor, deci îl recomandăm în defavoarea montajului în cruce.
Este contraproductiv să gândim că sensul de urcare corespunde şi sensului pozitiv al curentului din indus. O urcare cu cabina goală (din cauza contragreutăţii) se face cu o forţă de tracţiune negativă faţă de cazul urcării cu cabina plină!
Alegerea convertorului bidirecţional se face în funcţie de tensiunea nominală a maşinii şi curentul maxim ce apare în timpul funcţionării. Durata unei etape cu curent
este totdeauna mai mare decât timpul în care tiristorul (sau un alt element
semiconductor) suportă suprasarcini. De aceea CURENTUL NOMINAL AL REDRESORULUI BIDIRECŢIONAL ESTE CURENTUL MAXIM CE POATE APARE ÎN INDUSUL MOTORULUI DE ACŢIONARE.
În legătură cu tensiunea de ieşire a redresorului trebuie să facem următoarele observaţii:- se consideră unghiul maxim de comandă α = 150˚ din cauza prelungirii conducţiei
provocată de comutaţie,-La o comandă clasică a celor două redresoare α1+α2 = 180˚ unghiul minim de
comandă al redresorului activ ar fi α = 30˚,-Tensiunea de ieşire maximă a redresorului trifazat alimentat de la reţeaua industrială
va fi atunci . Tensiunea nominală de
440V poate fi realizată cu greutate, dată fiind fluctuaţia valorii tensiunii reţelei.Am ales din catalogul Intreprinderii Electrotehnica Bucuresti:
-convertizorul: AP 50 – 135X+10-…1 -cu variatorul: VPC 50 – 80 + 10-.... -cu bobina de retea indus: BRT 0,5/60 -cu bobina de retea excitatie: BR 3,5/10
6.1 Verificarea bobinelor de reţea.
Schema bloc monofilară din figură prezintă impedanţele înseriate pe care se repartizează amplitudinea crestării tensiunii de linie provocată de comutaţie. Tensiunea generatorului echivalent reţelei este perfect sinusoidală, neafectată de crestarea tensiunii care este maximă, până la zero la nivelul întrării în redresor. Prezenţa unei astfel de crestări pe barele de distribuţie deranjează funcţionarea tuturor dispozitivelor care iau decizii la
22

trecerea prin zero a tensiunii, cum ar fi dispozitivele de comandă pe grilă de exemplu. În schemă amplitudinea crestării este mai redusă pe barele de distribuţie din cauza căderii pe impedanţa bobinei de reţea XBRT. Impedanţele XRBT şi XS înseriate constituie un divizor pentru amplitudinea crestării tensiunii.Normele care stabilesc calitatea tensiunii reţelei impun o limită ariei crestării tensiunii la valoarea de 36500Vμs.
Fig.12 Schema monofilara de alimentare a SAE si crestarile tensiunii de linie la diverse niveluri
Adâncimea crestării se distribuie deci pe impedanţele înseriate. Dar lăţimea ei, durata comutaţiei depinde de suma impedanţelor înseriate intre generatorul echivalent si intrarea redresorului. Figura alăturată ne prezintă situaţia în care adâncimea crestării este maximă, adică la un unghi de comandă α = 90˚. În acel moment conducţia trece de la perechea de tiristoare 1-5 la perechea 1-6. Comutarea curentului între tiristoarele 5-6 înseamnă scurtcircuit între bornele S şi T, deci pe durata λ tensiunea uST = 0. Adâncimea crestării este aproximativ egală cu amplitudinea tensiunii de linie uST. Lăţimea crestării este dată în radiani de relaţia
23

Lăţimea crestării tensiunii pe barele de distribuţie (punctul B din schema monofilară) în
unităţi de timp se calculează cu relaţia .
Putem estima adâncimea crestării la intrarea redresorului cu ajutorul figurii explicative.
Comanda trecerii conducţiei de la perechea 1-5 la 1-6 se face în momentul
faţă de origina măsurării unghiului de comandă α care se află faţă de trecerea prin zero a
tensiunii uRS, . Numărul de pulsuri a l redresorului s-a notat cu p. Durata unui
puls de tensiune este 2π/p.
Aria crestării la intrarea redresorului in punctul C va fi deci aria trapezului din figură, adică
Aria crestarii pe barele de distributie (redresor si “alti consumatori”) se calculeaza cu relatiile generale ale unui divizor de tensiune:
(Acr)B = (Acr)C*Xs/(Xs+XBRT)
6.2 Alegerea bobinelor de limitare a curentului de circulaţie.
24

Fig.14 Plasarea bobinelor de limitare a curentului de circulatie la o schema de redresor trifazat bidirectional montaj antiparalel
Vom proceda în felul următor:
Calculăm inductivitatea de netezire necesară cu relaţia
-alegem fpiA(p,α)=0.15 si piA=0.1
Calculăm inductivitatea totală de limitare a curentului de circulaţie cu relaţia
; unde iC=0.2 si ICm=0.1IAN=0.1·51=5.1
25