PROCESOARE NUMERICE DESEMNAL
18
UNIVERSITATEA DIN ORADEA FACULTATEA DE „INGINERIE ELECTRICA SI TEHNOLOGIA INFORMATIEI” Specializare”RETELE SI SOFTWARE DE TELECOMUNICATII” Forma de invatamant:zi Anul IV,Grupa 1441B PROIECT LA DISCIPLINA PROCESOARE NUMERICE DE SEMNAL PROIECTAREA SI ANALIZA FILTRELOR DIGITALE
Transcript of PROCESOARE NUMERICE DESEMNAL

UNIVERSITATEA DIN ORADEAFACULTATEA DE „INGINERIE ELECTRICA SI TEHNOLOGIA INFORMATIEI”
Specializare”RETELE SI SOFTWARE DE TELECOMUNICATII”Forma de invatamant:zi
Anul IV,Grupa 1441B
PROIECT LA DISCIPLINAPROCESOARE NUMERICE DE
SEMNAL
PROIECTAREA SI ANALIZA FILTRELOR DIGITALE
PROFESOR INDRUMATOR REALIZATOR PROIECT

CUPRINS
1.GENERALITATI 1.1 Scurt Istoric 1.2 Clasificarea de tehnologie 1.3 Tipuri de filtre digitale
2. FILTRE DIGITALE CU RĂSPUNS FINIT LA IMPULS 2.1 Avantajele filtrarii digitale 2.2 Dezavantajele filtrarii digitale 2.3 Categorii de filtre digitale 2.4 Filtre realizabile fizic, selective de frecvenţă
3. ETAPE IN PROIECTAREA FILTRELOR DIGITALE
4. FILTRE CU RASPUNS FINIT LA IMPULS DE FAZA LINIARA 4.1 Principalele proprietati ale filtrelor FIR 4.2 Structura unui filtru adaptiv FIR 4.3 Aplicaţii ale filtrelor adaptive 4.4 Algoritmul LMS pentru ajustarea coeficienţilor filtrului adaptiv (implementare)

1. GENERALITATI
Filtrele sunt circuite electronice care efectueaza funcţii de prelucrarea semnalelor, special destinate pentru a elimina componentele de semnal nedorit şi / sau întări cele vrute. Cele mai comune tipuri de filtre electronice sunt filtrele liniare, indiferent de alte aspecte legate de proiectarea lor.
1.1Scurt Istoric
Cele mai vechi forme de filtre electronice sunt filtrele liniare pasive analogice, construite folosind doar rezistenţe şi condensatori sau rezistenţe şi inductoare.
Acestea sunt cunoscute sub denumirea filtre de RC şi respectiv RL pol singular. Filtre multipole LC mult mai complexe, au existat de asemenea de mulţi ani şi funcţionarea unor astfel de filtre este bine înţeleasă cu multe cărţi ce au fost scrise despre ele. Filtrele hibrid de asemenea, au fost făcute, care, de obicei implică combinaţii de amplificatoare analogice cu rezonatoare mecanice sau linii de întârziere. Alte dispozitive, cum ar fi linii de întârziere CCD au fost, de asemenea, folosite ca filtre discrete de timp. Cu disponibilitate de procesare de semnal digital, filtrele active digitale au devenit comune.
1.2Clasificarea de tehnologie
Filter pasive Aplicaţiile liniare de filtre pasive sunt bazate pe combinaţii de rezistoare (R), inductoare (L) şi condensatori (C). Aceste tipuri sunt cunoscute colectiv ca filtre pasive, deoarece nu depind de o sursă de alimentare externă. Un filtru în care semnalul trece printr-un inductor, sau în care un condensator furnizează o cale de împământare, prezintă mai puţină atenuare a semnalelor de frecvenţă scăzută decât a semnalelor de frecvenţă înaltă şi este un filtru low-pass. Rezistenţele singure nu au nici o proprietate de frecvenţe - selective, dar se adaugă la inductoare şi condensatori pentru determinarea constantelor de timp-circuit, şi, prin urmare, a frecvenţelor la care se răspunde. La frecvenţe foarte mari (mai sus de circa 100 de megahertzi), uneori, inductoarele sunt formate din buclele sau benzi dintr-o singură foaie de metal, si condensatori constau din benzi de metal adiacente.. Inductoarele şi condensatori sunt elemente reactive de filtrare. Numărul de elemente determină ordinea de filtru. În acest context, un circuit LC reglat a fi utilizat într-o bandă de-pass-stop sau banda de filtru este considerat un singur element, chiar dacă este alcătuit din două componente. Tipuri de elemente single Cel mai simplu filtru pasiv constă dintr-un singur element reactiv. Acestea sunt

construite din RC, RL, LC sau elemente RLC.Calitatea sau factorul "Q" este o măsură care este uneori folosita pentru a descrie filtre simple bandă-pass sau bandă-stop. Un filtru este declarat a avea un mare Q, dacă acesta alege sau respinge o gamă de frecvenţe care sunt înguste, în comparaţie cu centrul de frecvenţă. Q poate fi definită ca raportul dintre frecvenţa împărţită de către centrul de 3dB de lăţime de bandă
Filtru L. Filtrul analog are si la intrare si la iesire semnal analog, x(t) respectiv y(t) x(t) si y(t) sunt functii continue de t si pot sa aiba o infinitate de valori Filtrele analogice necesita cunostinte matematice avansate si intelegerea
proceselor implicate in sistemul care afecteaza filtru Datorita uneltelor moderne de digitalizare si de procesare de semnal se pot
introduce filtrele digitale in locul celor analogice
Filtrele digitale sunt utile in aplicatii care necesita flexibilitate si programabilitate Audio Telecomunicatii Monitorizare medicala
1.3 Tipuri de filtre digitale1. Filtre cu raspuns finit la impuls FIR2. Filtre cu raspuns infinit la impuls RII3. Filtre neliniare
Filtrele digitale pot fi împărţite în două clase, filtre cu răspuns finit la impuls (RFI) sau FIR (Finite Impulse Response) şi filtre cu răspuns infinit la impuls (RII) sau IIR (Infinite Impulse Response).
Oricare din aceste două tipuri poate fi reprezentat prin răspunsul la impulsh[n], ( n ∈ N pentru filtre cauzale).
Intrarea şi ieşirea filtrului sunt legate prin suma de convoluţie,dată de relaţia
-pt filtre F.I.R
-pt filtre I.I.R

Evident, pentru filtrele IIR răspunsul la impuls este de durată infinită şi pentru filtrele FIR răspunsul la impuls are numai M valori. În practică, pentru filtrele IIR nu se foloseşte forma din formula, pentru că lungimea filtrului este teoretic infinită, ci se foloseşte ecuaţia cu diferenţe, în formă recursivă.
2. FILTRE DIGITALE CU RĂSPUNS FINIT LA IMPULS
Un filtru digital sau numeric este un sistem discret care scalează şi/sau defazează în mod selectiv componentele spectrale ale semnalului discret de intrare, oferind la ieşire un semnal discret optim pentru scopul dorit.
Scopul filtrării este de a îmbunătăţi calitatea semnalului (de a reduce sau înlătura zgomotul), de a extrage informaţii sau de a separa două sau mai multe semnale combinate.
2.1 Avantajele filtrarii digitale

Filtrarea numerică este preferată celei analogice datorită unuia sau mai multora din următoarele avantaje:
1. Filtrele numerice pot avea caracteristici imposibil de realizat cu filtrele analogice, (de exemplu, fază perfect liniară, în cazul filtrelor FIR).
2. Spre deosebire de filtrele analogice, performanţele celor digitale nu variază cu variabilele mediului, de exemplu, temperatura. Aceasta elimină necesitatea calibrării periodice.
3. Răspunsul în frecvenţă poate fi ajustat automat prin implementarea filtrelor cu procesoare programabile, motiv pentru care se folosesc în filtrarea adaptivă, mai eficient decât celeanalogice.
4. Diferite semnale de intrare pot fi filtrate de un singur filtru digital,fără modificarea structurii hard, prin multiplexare.
5. Atât datele filtrate cât şi cele nefiltrate pot fi stocate pentru o prelucrare ulterioară.
6. Folosind avantajele tehnologiei VLSI, aceste filtre pot fi realizate la dimensiuni mici, putere mică, preţ scăzut.
7. În practică, precizia unui filtru analogic este limitată, atenuarea în banda de oprire pentru filtrele active fiind în jur de 60 ÷ 70 dB, la filtrele digitale, aceasta este limitată numai de lungimea cuvântului folosit, ajungându-se în mod curent la 80-100 dB.
8. Sunnt programabile din soft
9. Necesita dor operatii aritmetice: inmultiri, adunari si scaderi
10. Nu exista drift cu temperatura sau umiditatea sau componente precise
11. Nu sunt dependente de timp (uzura)
12. Prezinta o rata cost performanta mai buna decat cele analogice
2.2 Dezavantajele importante ale filtrării digitale faţă de cea analogică sunt:
1. Limitarea vitezei. Lăţimea de bandă a semnalelor pe care le poateprelucra un filtru digital în timp real este mult mai mică încomparaţie cu cele analogice. În funcţionarea în timp real,conversia analog/digitală (A/D) şi digital/analogicã (D/A)introduce restricţii de

viteză. Timpul de conversie al CAD şi CDAlimitează frecvenţa maximă care poate f I procesată. În plus, viteza operaţiei depinde de viteza procesorului digital şi de numărul deoperaţii pe care trebuie să le execute.
2. Efectele lungimii finite în reprezentarea numerelor. Filtrele digitale suferă de zgomotul de cuantizare al CAD şi de cel de rotunjire, apărut în timpul calculelor, care conduc la degradarea performanţelor acestora.
3. Timp mare de proiectare şi dezvoltare. Timpul de proiectare şi implementare hard este mult mai mare în comparaţie cu cel necesar filtrelor analogice. Unele programe de proiectare asistată de calculator pot însă realiza uşor acest lucru.
2.3. Filtre realizabile fizic, selective de frecvenţă
Cerinţele filtrelor digitale sunt în mod obişnuit specificate în domeniul frecvenţă şi sunt exprimate prin amplitudinea şi faza sau întârzierea răspunsului dorit. În cazul filtrului trece jos (FTJ), răspunsul în amplitudine dorit este de obicei dat de
unde Ws ş Wp reprezintă frecvenţele unghiulare corespunzătoare capătului benzii de trecere şi începutului benzii de oprire.
Deşi pentru un filtru real sunt de dorit caracteristicile filtrelorideale , acestea nu sunt absolut necesare în multe din aplicaţiile practice. Renunţând la condiţiile pe care trebuie să le posede un filtru ideal, este posibil a se obţine un filtru a cărui caracteristică să se apropie de cea ideală şi să satisfacă cerinţele deproiectare.
Relaxarea condiţiilor se referă la acceptarea faptului ca modulul H(ω ) să nu fie constant în întreaga bandă de trecere, un riplu mic fiind acceptabil. Similar, nu este absolut necesar ca H(ω ) să fie zero în banda de oprire, unde, de asemenea, este tolerabil un riplu mic.În caracteristica de amplitudine, trecerea de la banda de trecere lacea de oprire determină banda de tranziţie sau regiunea de tranziţie afiltrului.Modulul normalizat al funcţiei de transfer al unui filtru trece josrealizabil fizic este prezentat în figura , sub forma unei scheme detoleranţă.
Semnificaţia mărimilor de pe figură este următoarea:Wp - defineşte frecvenţa corespunzătoare capătului benzii de trecere(limita superioară a benzii de trecere);Ws - defineşte frecvenţa corespunzătoare începutului benzii de oprire(limita inferioară a benzii de oprire);

Wp-Ws - defineşte lăţimea benzii de tranziţie;δp - reprezintă riplul din banda de trecere, modulul | H(ω ) | variindîntre 1 ± δp ;δs - reprezintă riplul din banda de oprire.
●Limitele de toleranţă pentru aproximarea răspunsului în amplitudine a unui filtru trece jos real.
3. ETAPE IN PROIECTAREA FILTRELOR DIGITALE
Proiectarea unui filtru digital presupune parcurgerea următoarelor etape:
1. Specificarea cerinţelor filtrului;2. Calculul coeficienţilor filtrului, (aproximarea funcţiei de transfer);3. Stabilirea unui criteriu de calitate pentru răspunsul filtrului obţinut în comparaţie cu răspunsul dorit;4. Realizarea filtrului într-o structură potrivită, care realizează această funcţie de transfer. Realizarea presupune cuantizarea coeficienţilor la un număr finit de biţi şi efectuarea operaţiilor aritmetice cu o precizie finită;5. Analiza efectelor lungimii finite asupra performanţelor filtrului;6. Implementare soft şi/sau hard.Aceste etape nu sunt independente şi unele dintre ele pot fi reluateiterativ.

4. FILTRE CU RASPUNS FINIT LA IMPULS DE FAZA LINIARA
Unul dintre cele mai simple tipuri de filtre ce poate fi proiectat este filtrul FIR de fază liniară. Aşa cum va rezulta ulterior, numai filtrele FIR pot avea faza liniară, condiţie cerută în multe aplicaţii practice, cum ar fi comunicaţiile digitale.
Un filtru FIR de lungime M are răspunsul în frecvenţă, respectivfuncţia de transfer de forma
unde coeficienţii filtrului, bn , sunt valorile răspunsului la impuls alfiltrului, adică
Forma pentru funcţia de transfer:
unde:
Principalele proprietăţi ale funcţiei de transfer sunt:1. În cazul în care filtrul FIR are coeficienţii h[n] reali (aşa cum se întâmplă în majoritatea situaţiilor ce prezintă interes din punct de vedere practic), caracteristica de modul H(ω) este o funcţie pară, iar cea de fază ϕ(ω) sau θ(ω) este o funcţie impară.
2. Funcţia HR(ω) din relaţia (2.48) denumită funcţie de transfer de fază zero este o funcţie reală şi continuă, putând lua atât valori pozitive cât şi negative. Funcţia ϕ(ω) este, de asemenea, o funcţie continuă.
3. Funcţia θ(ω) prezintă salturi de π radiani la frecvenţele la care HR(ω) are treceri prin zero, numite frecvenţe de rejecţie. Acestea pot fi uşor identificate pe caracteristica de fază
4. În proiectarea filtrelor FIR se preferă exprimarea funcţiei de transfer în forma (2.48), datorită continuităţii funcţiilor HR(ω) şi ϕ(ω) în intervalul fundamental ω e [-π,π].
Condiţia de fază liniară se obţine prin impunerea unei condiţii desimetrie pară sau pozitivă asupra răspunsului la impuls al filtrului, numităuneori, simplu, condiţie de simetrie, adică
sau a unei condiţii de simetrie impară sau negativă asupra răspunsului laimpuls al filtrului, adică:

numită şi condiţie de antisimetrie.
4.1 Principalele proprietati ale filtrelor FIR sunt:
- posibilitatea de a avea o caracteristica de faza liniara, ceea ce permite utilizarea lor în prelucrarea semnalelor, fara a introduce distorsiuni de faza- stabilitatea pentru structurile care nu utilizeaza blocuri recursive;- implementarea eficienta, chiar în cazul filtrelor FIR de ordin mare, prin utilizarea algoritmilor transformatei Fourier rapide (TFR) pentru a transpune practice suma - posibilitatea de a avea coeficientii variabili în timp;- posibilitatea de a obtine filtre FIR de ordin înalt printr-o proiectare indirecta si o implementare ce foloseste filtre simple ca circuite de interpolare;- cuantizarea coeficientilor nu afecteaza stabilitatea;- zgomotul de rotunjire, inerent în realizarile cu precizie aritmetica finita, poate fi micsorat relative usor pentru filtrele FIR realizate nerecursiv;În afara de aceste avantaje filtrele FIR cu faza liniara prezinta si dezavantaje cum ar fi:- în anumite aplicatii, lungimea N (a functiei pondere a filtrului) ce satisface cerintele de proiectare este mare. Aceasta implica în mod evident o întârziere de grup normata mare, egala cu (N-1)/2, ceea ce poate fi un impediment în unele cazuri;- întârzierea filtrelor FIR cu faza liniara nu este întotdeauna un numar întreg de perioade de esantionare, fapt ce poate crea anumite probleme în unele aplicatii;- de asemenea, în sistemele de control cu reactie, o întârziere mare în bucla de reactie este în general inacceptabila.
4.2 Structura unui filtru adaptiv FIR
În multe aplicaţii de prelucrare a semnalelor coeficienţii filtrelor numerice nu pot fi calculaţi iniţial (offline) după care să se execute filtrarea în timp real. De exemplu un modem care transmite şi receptionează date pe olinie telefonică trebuie să conţină în structura sa şi un egalizor care să corecteze distorsiunile care apar în mediul de transmisie.
Deoarece canalul de transmisie are diferite caracteristici de răspuns în frecvenţă la momente de timp distincte , rezultă că distorsiunile vor fi diferite la momente de timp diferite,deci egalizorul trebuie să-şi modifice coeficienţii în timp (trebuie să aibă coeficienţi ajustabili).
Din acest motiv egalizorul se mai numeşte şi egalizor adaptiv sau generic filtru adaptiv.
Un filtru adaptiv este de fapt un filtru numeric la care se adaugă un bloc de ajustare a coeficienţilor.(figura 1).

Structura din figura 1 este cea mai des utilizată datorită faptului că filtrul digital este de tip FIR (mai simplu de realizat). Există şi filtre adaptive în structură IIR.De asemenea structura FIR este preferată deoarece este necondiţionat stabilă , spre deosebire de structura IIR.
Coeficienţii filtrului adaptiv se calculează conform unui algoritm care urmăreşte ca ieşirea filtrului să fie cîtmai aproape de o ieşire dorită (ideală).Observaţie : în cazul filtrelor adaptive coeficienţii nu se calculează cu metodele studiate pentru filtrele obişnuite(neadaptive).
Un algoritm de ajustare a coeficienţilor filtrului adaptiv trebuie să posede următoarele caracteristici :
1.- rată de convergenţă ridicată(rata de convergenţă este definită ca numărul de iteraţii necesar pentru ca ieşirea filtrului să se apropie suficient de mult de ieşirea dorită ) . Un algoritm cu rată de convergenţă ridicată conduce la un filtru adaptiv care poate urmări variaţii rapide ale semnalului de intrare.
2.- factor de dezacord mic( factorul de dezacord indică diferenţa între ieşirea obtinută şi ieşirea dorită ) .Acest factor oferă o informaţie cantitativă asupra calităţii filtrului adaptiv real în comparaţie cu filtrul adaptiv teoretic.
3.- robusteţe

se referă la capacitatea algoritmului de a opera satisfăcător la o gamă diversă de secvenţe de intrare (semnale deterministe sau semnale aleatoare cu caracteristici statistice diferite).
4.- cerinţe de calcul reduse se referă la numarul de operaţii necesare pentru implementare (adunări, scăderi, înmulţiri, împărţiri) , la capacitatea de memorie necesară pentru structura de date a algoritmului şi la efortul de programare necesar implementării algoritmului pe calculator.
5.- structura simplă algoritmul trebuie să fie modular şi cu un grad ridicat de paralelism (pentru a puteafi uşor realizat hardware în tehnologie VLSI).
4.3 Aplicaţii ale filtrelor adaptive
În domeniul telecomunicaţiilor filtrele adaptive au următoarele aplicaţii importante:
Compensarea ecoului
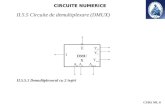
În retelele telefonice care utilizează circuite de conversie de la 2 fire la 4 fire (hibrid) se poate produce fenomenul de ecou. Datorită imperfecţiunii hibridului o parte din semnalul emis se reîntoarce la sursa de emisie cu o întîrziere oarecare;dacă această întîrziere este mare atunci se produce fenomenul de ecou. În figura 2 este prezentat un sistem de transmisiune cu protecţie la ecou.

Figura 2. Compensatorul adaptiv de ecouCompensatorul de ecou este un filtru adaptiv pentru care
ajustarea coeficienţilor se face astfel ca ieşirea filtrului să fie cît mai apropiată de ieşirea din hibrid;în linie se va emite diferenţa dintre ieşirea hibridului şi ieşirea filtrului adaptiv adică un semnal fără ecou.
4.4 Algoritmul LMS pentru ajustarea coeficienţilor filtrului adaptiv
Ajustarea coeficienţilor filtrului adaptiv se realizează cu scopul de a minimiza diferenţa dintre ieşireafiltrului adaptiv şi o ieşire dorită.
Implementarea algoritmului LMS
În continuare se prezintă o modalitate se implementare a algoritmului LMS de adaptare a coeficientilor.
Rutina trebuie apelată la fiecare achiziţie a unui eşantion nou. Implementarea filtrului adaptiv ( pentru ALE, sau pentru compensatorul adaptiv de ecou) va conţine o rutină de implementare a filtrului FIR şi o rutină de adapare a coeficienţilor filtrului FIR.