Pollner C R36

of 9
Transcript of Pollner C R36
-
8/12/2019 Pollner C R36
1/9
359
COMANDA I CONTROLUL UNUIMODEL EXPERIMENTAL DE
PRESDE VULCANIZATMECANIC
COMMAND AND CONTROL OFAN EXPERIMENTAL MODEL OF A
MECHANICAL VULCANIZINGPRESS
Cosmina PLLNER, Ctlin CHIVU, Romeo CIOARTransilvania University of Brasov, Romania
Rezumat.Cercetri efectuate la Universitatea Transilvaniadin Braov, Romnia, au fost orientate ctre explorareaposibilitilor de a concepe prese de vulcanizat mecanicecu performane identice sau superioare preselor devulcanizat hidraulice utilizate n prezent. Se urmreteconservarea avantajelor identificate la acestea i mai aleseliminarea unora dintre dezavantaje.
Pentru a valida practic conceptul original de presdevulcanizat mecanic cu un singur urub, inclusiv a
sistemului de acionare i comand a acesteia, precum ibuna funcionare a modului de reglare a forei ca rspuns ntimp real la variaiile de presiune determinate n matrideprocesul de vulcanizare s-a realizat un model experimental.
Modelul experimental este echipat cu un sistemelectronic de comand i control modern bazat pe unautomat cu stri finite.
Modelul experimental are un gabarit suficient demare nct fora de presare capabila fi suportatajungesfie de acelai ordin de mrime cu cea a unor prese devulcanizat reale.
Abstract.Research conducted at Transilvania Universityof Brasov, Romania, was orientated to exploring thepossibilities of designing mechanical vulcanizing presswith same or higher performances of hydraulicvulcanizing presses currently used. It aims to preservethe advantages identified at these including the removalof some of the disadvantages.
To validate practically the original concept ofmechanical vulcanizing press with a single screw,
including the drive and control system, as well as how tocontrol the proper functioning of force as a response in realtime at pressure variations determined in mold byvulcanization process was achieved an experimentalmodel.
The experimental model is equipped with a modernelectronic controls based on finite state machine.
The experimental model has a large enough gaugethat pressing force capable to be support becomes of thesame order of magnitude as that of some real vulcanizingpresses.
Cuvinte cheie:model experimental, presde vulcanizat
mecanic, sistem electronic de comandi control
Key words:experimental model, mechanical vulcanizing
press, electronic system of command and control
1. IntroducereConceptul de pres de vulcanizat mecanic cu
urub [1] este unul novativ, nentlnit ca atare nstadiul cunoaterii i practicii preselor de vulcanizat.
Noutatea i originalitatea conceptului teoretic, apremiselor acestuia i a performanelor anticipate,necesiti validarea practic. Se urmrete n modexplicit atestarea faptului c proiectarea i modulestimat al unei astfel de maini att din punct devedere al ipotezelor, ct i din punct de vedere al
rezultatelor este unul corect.n funcie de obiectivele cercetrii, de
complexitatea sistemului, de gradul de noutate alacestuia i de resursele necesare pentru realizarea itestarea sa se poate opta pentru un model funcional,un model experimental (realizat la scarredus) sauun prototip.
S-a optat ca modalitatea de validare aconceptului de pres de vulcanizat mecanic s sefacatt prin studiu n mediu virtual al unui model3D, ct i prin realizarea i testarea unui modelexperimental [1].
1. IntroductionThe concept of mechanical vulcanizing press
with screw [1] is one innovative, not meet in the stateof knowledge and practice of vulcanizing presses.
The novelty and originality of the theoreticallyconcept, of its premises and anticipatedperformance require practice validation. It aimsexplicitly to attest that designing and estimatedmode of these machines both in terms ofhypotheses, as well as in terms of results is
correct.Depending on the research objectives, the
complexity of the system, the degree of novelty of itand the resources needed to development andtesting can opt for a functional model, anexperimental model (achieved small scale) or aprototype.
Has been chosen as a way of validating theconcept of mechanical vulcanizing press to makeboth by study in a virtual environment of a 3Dmodel, as well as through achievement and testingof an experimental model [1].
-
8/12/2019 Pollner C R36
2/9
RECENT, Vol. 13, no. 3(36), November, 2012
360
2. Model experimental de presdevulcanizat mecanic
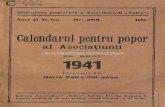
Schema cinematic a unei prese de vulcanizatmecanic cu un singur urub [1] care se compunedin dou sisteme de antrenare complet distincte i
un singur mecanism urub-piuli, de transformare amicrii de rotaie a unui arbore-urub n micare detranslaie a platanelor, se prezintn figura 1a.
n dotarea laboratoarelor Departamentului deInginerie i Management Industrial din cadrulFacultii de Inginerie Tehnologici ManagementIndustrial a Universitii Transilvania din Braov,s-a identificat un echipament a crui construcie idotare au fost n mare msur compatibile cucerinele modelului experimental de pres devulcanizat mecaniccu urub. La acesta, figura 1b,se identificun motor electric (trifazat, ASI 100L-28-8, cu patru perechi de poli, de putereNM= 1,1 kW ituraie nominalnM= 705 rot/min), un cuplaj elasticcu boluri, coaxial, un reductor melcat ntr-o treapt,cu raport de transmitere (demultiplicare) 1:63, unmecanism urub-piulicu bile, cu pas pS= 12 mm,doucoloane de ghidare i un platan mobil solidar cupiulia, ghidat de cele dou coloane. Structura derezisten este format dintr-un batiu, amplasat npartea inferioari realizat n construcie sudatdinprofiluri laminate, o placfixinferioar, solidarcubatiul, patru coloane i o plac superioar susinut
de coloane i fixatfade acestea prin piulie.
2. Experimental model of a mechanicalvulcanizing press
Kinematical scheme of a mechanicalvulcanizing press with a single screw [1], which iscomposed of two completely separate drive systems
and one screw-nut mechanism for transformingrotary motion of a screw-shaft in translationalmotion of plates, shown in Figure 1a.
In the laboratories of the Department ofIndustrial Engineering and Management, Faculty ofEngineering Technology and Industrial Managementof Transilvania University of Brasov, has beenidentified an equipment whose construction andendowment have been largely compatible with therequirements of experimental model of mechanicalvulcanizing press with screw. At this, Figure 1b, hasbeen identified an electric motor (three phase ASI100L-28-8, with four pairs of poles, by powerNM = 1.1 kW and rated speed applicationsnM= 705 prm) an elastic coupling bolts, coaxial, aworm gear in a gear with transmission ratio(reduction gear) 1:63, a screw-nut mechanism withball, by steppS= 12 mm, two guiding columns andone mobile plate severally with nut, guided by twocolumns. Bearing structure consists of a frame,located at the bottom and made under constructionwelded by rolled profiles, the lower fixed plate,solidary with frame, four columns and a top plate
supported by columns and attached towards themby the nuts.
4
5
9
7
2
8
c
6
3
13
12
10
d
b
a
1
11
1716
19
14
20
2115 (D)18
27
22
28
2923 (D)
e
24
25
26
A
B
34
31
32
30
36
35E
37
33
a) b)
Figura 1. Schema cinematici modelul experimental al unei prese de vulcanizat mecanice cu un singur urubFigure 1. Kinematical scheme and the experimental model of a mechanical vulcanizing press with a single screw
-
8/12/2019 Pollner C R36
3/9
RECENT, Vol. 13, no. 3(36), November, 2012
361
La modelul experimental fora rezistenteste datde un arc cilindric de compresiune, asamblatpresolicitat. Acesta are patru spire active, pasul arculuinesolicitat t= 77,5 mm, diametru mediu de nfurareDm = 147,5 mm, diametrul spirei d = 12,5 mm i
nlimea total, n stare liber, H0 = 350 mm. Caurmare constanta arcului este k= 15,2 N/mm.Fora rezistent a arcului se substituie forei
rezistent generat de procesul de vulcanizare. nacelai timp, arcul este integrat n sistemul demsurare i de reglare a forei rezistente. Msurareaforei rezistente se face indirect prin msurareadeformaiei elastice a arcului.
Sistemul de msurare a sgeii arcului cuprindeun cap de citire incremental i o band gradat,ambele provenind de la o imprimantHP DeskJet.Banda are 60 gradaii per 2,54 mm. Ca urmare
sistemul de msurare asiguro precizie teoreticdepoziionare de 42,3 m, echivalent cu o precizieteoreticde reglare a forei de 0,643 N.
To the experimental model resistant force is giveby a cylindrical compression spring assembledprerequisite. It has four active coils, spring stepunsolicited t = 77.5 mm, mean diameter windingDm= 147.5 mm, coil diameter d= 12.5 mm and total
height, in the free state,H0= 350 mm. Following thespring constant is k= 15.2 N/mm.Resistant force of the spring is substitute to
resistant force generated by vulcanizing process. Atthe same time, the spring is integrated inmeasurement and control system of resistant force.Resistant force measurement is done indirectly bymeasuring the elastic deformation of the spring.
Measurement system of a spring arrowcomprises incremental tape head and a graduatedtape both originating from a HP DeskJet printer.The tape has 60 graduations per 2.54 mm. Therefore
measuring system ensures accurate positioningtheory to 42.3 m, equivalent to a theoreticalprecision control force by 0.643 N
2.1. Sistemul electric de acionare al modeluluiexperimental
Modelul experimental este acionat de un motorde curent alternativ trifazat, asincron, cu conexiunestea. Inversarea sensului de rotaie se poate realizaprin inversarea a doufaze la bornele motorului.
Motorul este alimentat de la reeaua trifazat(R,S, T) prin intermediul a trei sigurane fuzibile, e1,figura 2, i prin unul dintre contactoarele C1sau C2.
2.1. Electric drive system of experimental modelThe experimental model is power by an AC
motor three-phase asynchronous with starconnection. Reversing the direction of rotation canbe accomplished by reversing the two phases at themotor terminals.
The motor is powered from the mains phase (R,S, T) through three fuses mainly, e1, Figure 2, andone of the contactors C1or C2.
Figura 2. Schema electricde alimentare a motorului modelului experimental i realizarea fizicFigure 2. Motor supply electric scheme of the experimental model and physical implementation
-
8/12/2019 Pollner C R36
4/9
RECENT, Vol. 13, no. 3(36), November, 2012
362
Contactorul C1 realizeaz alimentarea motoruluiastfel nct, atunci cnd arborele acestuia se va roti, vadetermina platanul modelului experimental surce.
Contactorul C2 realizeaz alimentarea motoruluiastfel nct, atunci cnd arborele acestuia se va roti, va
determina platanul modelului experimental scoboare.Cele doucontactoare C1 i C2 nu au voie s fiecomandate n acelai timp, nici mcar pentru o fraciunede secund, deoarece ar determina un scurtcircuit ntrefaza S i faza T. Suplimentar, la inversarea sensului derotaie al motorului este recomandat trecerea printr-operioad scurt de timp n care motorul s nu fiealimentat, astfel nct micarea acestuia sfie ncetinitde forele rezistente din sistem.
Contactor C1 performs engine power so whenthe shaft it will rotate, will determine the plate ofexperimental model to climb.
Contactor C2 performs engine power so whenthe shaft it will rotate, will determine the plate of
experimental model to descend.The two contactors C1 and C2 may not beordered at the same time, even for a split second,because it causes a short circuit between phase Sand phase T. In addition, at reversal sense ofrotation engine is advisable pass through a shortperiod in which the engine may not be powered, so tits movement is slowed by resistance forces fromthe system.
2.2. Comanda i controlul modelului experimentalComponenta centrala sistemului electronic de
comand i control al modelului experimental,(figura 3), este reprezentat de microcontrolerulATtiny2313 [2].
2.2. Command and control of experimental modelThe microcontroller ATTINY2313 represents
[2] the central component of the electronic systemof command and control of experimental model,(Figure 3).
Figura 3. Schema electronicde comandi control a modelului experimentalFigure 3. Electronic command and control scheme of the experimental model
Microcontrolerul [3] este dotat cu memorieprogram EEPROM (Electrical EraseableProgramable Read Only Memory) i memorie RAM(Random Access Memory), cu porturi de intrare iieire configurabile, cu temporizator, toate proprii.
Microcontrolerul primete, n faza de dezvoltare,programul pe care urmeaz s-l ruleze n faza deexploatare. Acest program se transfer ntrecalculator i microcontroler cu ajutorul unui
programator specializat. Programatorul are dou
Microcontrollers [3] are equipped withEEPROM program memory (Erasable ElectricalProgrammable Read Only Memory) and RAMmemory (Random Access Memory) with input andoutput ports configurable with timer, all it own.
Microcontroller receives, in developmentphase, the program that is running it in theoperational phase. This program is transfer betweencomputer and microcontroller using a specialized
programmer. The programmer has two components,
-
8/12/2019 Pollner C R36
5/9
RECENT, Vol. 13, no. 3(36), November, 2012
363
componente, una hardware (un circuit electronic lacare se conecteazmicrocontrolerul) i una software,Win AVR (care ruleazpe calculator i care realizeazcomunicaia ntre calculator i microcontroler).
Microcontrolerul are oscilator intern propriu,
deci nu necesit componente suplimentare n acestscop. La punerea sub tensiune se fac o serie deiniializri, dup care microcontrolerul intr ntr-ostare de ateptare, fazn care poate primi comenzide la panoul frontal al mainii.
the hardware (electronic circuit connects to themicrocontroller) and the software, Win AVR(running on the computer and which carries outcommunication between PC and microcontroller).
Microcontrollers have own internal oscillator,
so no additional components required for thispurpose. Be on upon powering is make a series ofinitializations, after which the microcontrollerenters into a standby, phase it can receivecommands from the front panel of the machine.
2.3. Diagrama de stri a automatului cu stri finiteAutomatul cu stri finite are n componenun
numr de unsprezece stri. Fiecare stare estecaracterizatde o anumitconfiguraie a porturilorde ieire i prin urmare are o anumitdestinaie isemnificaie. Tranziia ntre stri se face controlat,
pe baza unor condiii bine determinate. Condiiilede tranziie pot fi simple sau compuse i implicstarea de apsare sau eliberare a butoanelor de pepanoul central, starea micro-limitatorului de cursia parametrului poziie n comparaie cu unele valoripredefinite (Fmin, Fmax, Fopt, Ftol, h_aerare).
Diagrama de stri (figura 4) reprezint fazaintermediar de dezvoltare, prin intermediul creiase face trecerea de la descrierea aproximativ aprincipiului de funcionare a mainii, la lista exactde instruciuni pe care urmeaz s le executemaina, ca sistem cu stri precis determinate.
2.3. State diagram of finite state machineFinite state automaton is composed of a number
of eleven states. Each state is characterize by acertain configuration of output ports and thereforehas a specific destination and significance.Transition between states is control based on well-
defined conditions. Transitional conditions can besimple or compound and involves pressing andreleasing the state of button on the front panel,micro-limit stop state and parameter positioncompared to some predefined values (Fmin, Fmax,Fopt, Ftol, h_aerare).
State diagram (Figure 4) representsintermediate stage of development, through whichpass from the approximate description of theprinciple of operation of the machine, at exact list ofinstructions that are to execute away, as a systemwith states precisely determined.
Figura 4. Diagrama de stri a automatului cu stri finiteFigure 4.State diagram of finite state machine
n momentul punerii mainii sub tensiune, aceastaintr n starea 1, stare de pornire, n care platanulprincipal al mainii se afl n stare de coborre.
Condiiile de tranziie ntre stri sunt verificaterepetitiv, la intervale foarte scurte de timp (sub 1 ms).
When putting the machine under tension, itenters into state 1, state of starting, in which themain plate of machine is in a state of descent.
Transition conditions between states are checkingrepetitively in very short time intervals (less than
-
8/12/2019 Pollner C R36
6/9
RECENT, Vol. 13, no. 3(36), November, 2012
364
Dac limitatorul de curs uSW se afl n stare 1,tranziia se face din starea 1 n starea 1 (platanulprincipal coboar). Dac limitatorul de cursuSW seafl n stare 0 (platanul principal se afl n zona deaciune a limitatorului de curs), tranziia se face din
starea 1 n starea 2 (platanul principal urc).Atta timp ct platanul principal se afln zona deaciune a limitatorului de cursuSW, tranziia se face
ntre starea 2 i starea 2 (platanul principal continusurce). Atunci cnd platanul principal iese din zona deaciune a limitatorului de curs uSW, se realizeaztranziia din starea 2 n starea 3 (n care platanulprincipal urmeazs intre n repaus). La tranziia dinstarea 2 n starea 3 se efectueaz resetul variabileipoziie (poziia platanului principal, la momentulacestei tranziii, este consideratpoziie de zero).
Starea 3 reprezintde fapt starea de repaus (stand
by), n care se ateapt apsarea butonului de startpentru iniierea ciclului mainii. Tranziia se face dinstarea 3 n starea 3 (stand by), dacbutonul de start nueste apsat. Dacse apasbutonul de start, atunci estesatisfcutcondiia de tranziie din starea 3 n starea 4.
Starea 4 reprezintprima stare activa ciclului delucru al mainii (de dupapsarea butonului de start).n starea 4 platanul principal urc rapid ctre poziiaFmin. Dacpoziia instantanee este mai micdect Fmin(platanul principal nu a urcat pn la poziia Fmin)tranziia se face ntre starea 4 i starea 4 (continuurcarea rapid). Dac poziia curent este egal saumai mare dect Fmin se face tranziia ntre starea 4 istarea 5 (se trece la vitezde avans tehnologic).
n starea 5, platanul principal urc dinsprepoziia Fmin ctre poziia Fopt cu vitezmic (vitezde avans tehnologic). Maina rmne n starea 5(tranziteaz din starea 5 n starea 5) atta timp ctpoziia instantanee a platanului principal este maimic dect poziia Fopt. Dac poziia instantanee aplatanului principal devine egalsau mai mare dectpoziia Fopt, atunci se face tranziia din starea 5 nstarea 6.
Starea 6 este starea de ateptare tehnologic. naceast stare se activeaz un contor de timp carenumr secundele. Dac valoarea acestui contordepete o valoare prestabilit se iniiaz tranziiadin starea 6 n starea 1. n starea 6 se monitorizeazbutoanele P1 i P2, i valoarea poziiei instantanee aplatanului principal.
Butoanele P1 i P2 au fost prevzute pentrusimularea manual (intenionat) a unor devieri depoziie a platanului principal, de la poziia Fopt,
nafara intervalului de tolerandefinit de Fopt Ftoli Fopt+ Ftol.
La apsarea butonului P1 se face tranziia din
1 ms). If limit stop uSW is in state 1, the transitionis made from state 1 to state 1 (main platedescends). If limit stop uSW is in state 0 (mainplate is in area of action of limit stop), thetransition is made from state 1 to state 2 (main
plate climbs).As long as the main plate is in area of actionof limit stop uSW, the transition is made betweenstate 2 and state 2 (main plate continues to climb).When the main plate comes out of area of action oflimit stop uSW is make the transition from state 2to state 3 (in which the main plate will enter intorest). In the transition from state 2 into state 3 iscarried out variable reset position (main plateposition at the time of this transition is consideredneutral position).
State 3 is in fact sleep mode (standby), which
expects pressing the start button for initiating themachine cycle. Transition is making from state 3into state 3 (stand by), if the start button is notpressed. If is pressed the start button, then issatisfied transition condition from state 3 in state 4.
State 4 represents first active state of workingcycle of the machine (after pressing the start button).In state 4 main plates quickly climbs to position Fmin.If instantaneous position is less than Fmin(main platedid not climbed to position Fmin) transition is madebetween state 4 and state 4 (continues rapid ascent).If the current position is equal or greater than Fminisdone transition from state 4 to state 5 (move totechnological advance speed).
In state 5, main plate climbs from position Fminto position Fopt with low speed (speed oftechnological advance). Machine remains into state 5(transiting from state 5 in states 5) as long as theinstantaneous position of the main plate is smallerthan Foptposition. If the instantaneous position of themain plate is equal or greater than Foptposition, thenis make the transition from state 5 into state 6.
Status 6 is the technological idle status. In
this state is activated a timer that counts theseconds. If the value of this counter exceeds apreset value is initiated transition from state 6 tostate 1. In state 6 are monitoring the buttons P1and P2, and the value of instantaneous position ofthe main plate.
P1 and P2 buttons have been providing tosimulate manual (intentional) of main platesposition deviations, from Foptposition, outside ofthe tolerance range defined by Fopt Ftol andFopt+ Ftol.
By pressing P1 is done the transition from
status 6 into status 7 (in which main plate climbs),
-
8/12/2019 Pollner C R36
7/9
RECENT, Vol. 13, no. 3(36), November, 2012
365
starea 6 n starea 7 (n care platanul principal urc),i rmne in starea 7 atta timp ct este meninutapsat butonul P1, i nu este depitpoziia Fmax.
Daceste depitpoziia Fmax, se face tranziiadin starea 7 n starea 1 (se trece n stare de avarie i
se face retragerea platanului principal pnn dreptullimitatorului de curs uSW, se trece n starea 2, deieire din zona limitatorului de curs uSW prinurcare, si ulterior se efectueazun reset, prin trecereadin starea 2 n starea 3, starea de stand by).
La apsarea butonului P2 se face tranziia dinstarea 6 n starea 8 (n care platanul principal coboar),i rmne in starea 8 atta timp ct este meninutapsat butonul P2, i nu se coboar sub poziia Fmin.Dacse coboarsub poziia Fmin, se face tranziia dinstarea 8 n starea 1 (se trece n stare de avarie i se faceretragerea platanului principal pn n dreptul
limitatorului de curs uSW, se trece n starea 2, deieire din zona limitatorului de cursuSW prin urcare,i ulterior se efectueaz un reset, prin trecerea dinstarea 2 n starea 3, starea de stand by).
n starea 6, dacvaloarea poziiei instantanee aplatanului principal este mai mare dect Fopt Ftoli, n acelai timp, mai mic dect Fopt + Ftol(poziia platanului principal se afl n intervalul detoleran), nu este necesaro corecie, i tranziia seface ntre starea 6 i starea 6 (se ateapt ncontinuare expirarea timpului limit).
Dac poziia platanului principal depetepoziia Fopt + Ftol (din motive de proces), devinenecesaro corecie i se face tranziia din starea 6 nstarea 9 (se coboarnapoi ctre Fopt). Dacpoziiaplatanului principal scade sub poziia Fopt Ftol(dinmotive de proces), devine necesaro corecie i seface tranziia din starea 6 n starea 10 (se coboarncontinuare ctre Fmin, de unde, prin intermediulstrii 5, se urc napoi ctre Fopt). Dac se apasbutonul start, se face tranziia din starea 6 n starea11 (se iniiazprocesul de aerare).
n starea 11, platanul principal coboarpnla
poziia h_aerare. Dacplatanul principal a cobortsub poziia h_aerare, se face tranziia din starea 11n starea 4, de unde se reia tranziia ctre starea 6,trecnd prin starea 5.
and remains in state 7 as long as is maintainedpressed button P1, and Fmax position is notexceeded.
If it is exceed position Fmax, is makes thetransition from status 7 to state 1 (is passed into
damaged condition and is done withdrawal of mainlyplate until the right of limit stop uSW, is passed intostate 2, the output from the limiter stop uSW throughclimb, and then are made shall reset by switchingfrom state 2 into state 3, standby status).
By pressing P2 is makes the transition fromstate 6 into status 8 (in which main plate descends),and remains in status 8 as long as is maintained thebutton pressed P2, and not fall below Fminposition.If it falls below positionFmin, is makes the transitionfrom status 8 into state 1 (is passed into damagedcondition and is done withdrawal of mainly plate
until right of limit stop uSW, is passed into state 2,the output from the limiter stop uSW through climb,and then are made shall reset by switching fromstate 2 into state 3, standby status).
In state 6, if the instantaneous position of themain plate is bigger than Fopt Ftol and in thesame time, lower than Fopt + Ftol (main plateposition is in the range of tolerance), correction isnot required, and the transition is done from state6 into state 6 (is expected the timeout limit).
If main plate position exceeds the positionFopt + Ftol (because of process), it becomesnecessary correction and is makes the transitionfrom state 6 into status 9 (descends back to Fopt).If the position of main plate decreases under theheading Fopt Ftol due to process), it becomesnecessary correction and is makes the transitionfrom state 6 into status 10 (still descends to Fmin,where, through state 5, climbs back to Fopt). If ispressed the start button, it makes the transitionfrom state 6 into status 11 (aeration process isinitiated).
In status 11, main plate descends to h_aerare
position. If main plate hath descended belowh_aerare position, is makes the transition fromstatus 11 to status 4, where it takes the transition tostate 6, through status 5.
2.4. Ciclul de lucru al modelului experimentaln starea iniialplatanul se afln poziia de zero,
de punct mort inferior. n urma acionrii butonuluide start, platanul urc pn se atinge poziiacorespunztoare forei minime de presare (figura 5),Fmin. Dupo micstaionare, platanul continusurcepn se atinge poziia corespunztoare forei optime
de presare, Fopt, unde staioneaz.
2.4. Working cycle of experimental modelIn the initial state the plate is in a neutral position
of lower dead point. After actuation start button, theplate climbs until reaching corresponding position ofminimum force pressing (Figure 5) Fmin. After a smallstationary, the plate continues to climb until it reachesthe position corresponding optimum pressing force,
Fopt, where stationary.
-
8/12/2019 Pollner C R36
8/9
RECENT, Vol. 13, no. 3(36), November, 2012
366
Figura 5. Ciclul de lucru al modelului experimentalFigure 5.Working cycle of experimental model
Ca urmare a executrii programului sau caurmare a unei comenzi externe se execut o
Perturbaie pozitiv, ceea ce corespunde simulriicreterii forei de presare cu o valoare mai maredect una tolerat, Ftol, corespunztoare uneicomprimri suplimentare a arcului cu o cot .Evident, Ftol = k, unde k este constanta arculuimodelului experimental. Platanul intrdin nou ntr-o stare de staionare.
Poate urma o nou Perturbaie pozitiv, oPerturbaie negativ sau o fazde Aerare.
Ca i n cazul Perturbaie pozitiv, oPerturbaie negativ apare ca urmare a executriiprogramului sau ca urmare a unei comenzi externe. O
Perturbaie negativ corespunde simulrii scderiiforei de presare cu o valoare mai mic dect ceatolerat, Ftol, corespunztoare unei destinderi aarcului cu o cot. Dup o Perturbaie negativ,platanul intrdin nou ntr-o stare de staionare.
Faza de aerare presupune coborrea platanuluipn la o cot h_aerare i simuleaz deschidereamatriei.
Ulterior unei faze de aerare se execut,conform programului sau ca urmare a unor comenziexterne exprese, una sau mai multe faze dePerturbaie pozitiv i/sau Perturbaie negativ,faze ce simuleaz autocorectarea periodic a foreide presare la valoarea optim, Fopt.
Atingerea valorii maxime Fmax prereglate aforei, Fmax > Fopt + Ftol, constituie o funcionareneadecvat a sistemului i determin intrarea nstare de Avarie. Rspunsul sistemului estecoborrea imediat a platanului n poziia sa dezero, urmatde o eventualreluare a procesului.
Following the execution of the program orfollowing of external command is running a
Positive disturbance which corresponds growthsimulation of pressing force with a value greaterthan one tolerated Ftol, corresponding to a furthercompression of the spring with a quota .Obviously, Ftol= k, where kis the spring constantof experimental model. The plate enters again into astationary state.
Can follow a new Positive disturbance, aNegative disturbance or a phase of Aeration.
As in the case of Positive disturbance", aNegative disturbance appears following theexecution of the program or as a result of external
controls. A Negative disturbance correspond lowersimulation of pressing force to a value lower than thetolerable Ftol, corresponding to a detente springwith a quota . After a Negative disturbance, plateenters again into a stationary state.
Aeration phase requires descending dish to aquota h_aerareand simulate opening of mold.
After an aeration phases is executed accordingto the program or as a result of external controlsexpress one or more phases of PositiveDisturbance and / or Disturbance negative,phases that simulates the periodic autocorrecting ofpressing force at the optimal value, Fopt.
Reaching a maximum value of preset forceFmax, Fmax > Fopt + Ftol, constitute inadequatefunctioning of the system and determines the entryinto a state of Fault. System response isimmediate descending plate into neutral position,followed by an eventual resumption of the process.
3. ConcluziiCercetarea experimental asupra modelului
experimental a vizat n mod explicit studiulconstruciei i funcionrii acestuia, ca singur
3. ConclusionsExperimental research on the experimental
model aimed specifically the study of its constructionand operation, as the only means of validation certain,
-
8/12/2019 Pollner C R36
9/9
RECENT, Vol. 13, no. 3(36), November, 2012
367
modalitate de validare cert, practic, a conceptuluioriginal de presde vulcanizat mecanic, cu urub.
Sistemul electric al modelului experimentalasigurschimbarea sensului de rotaie al motorului
n funcie de cerinele fazei de program executat.
Sistemul electronic de comand i control [4]conine un automat cu stri finite, care memoreazntreg programul asociat ciclului de lucru al modeluluiexperimental i comand executarea acestuia. Poateexagernd ntr-o anumit msur, se poate vorbidespre un model experimental de pres de vulcanizatmecanic, cu urub, cu comandnumeric.
Este elaborat un ciclu de lucru al modeluluiexperimental i un program, denumit ComConME-PVM, n limbajul de programare C [5] conceput scomande sistemul de acionare al modeluluiexperimental n aa fel nct acesta s execute un
ciclu cinematic n acord cu ciclul general de lucru alunei prese de vulcanizat.
S-a concluzionat c modelul experimentalmerita fi completat cu o frnelectromagneticcudiscuri, comandat de program. Ca o consecin atestrii modelului experimental a rezultat necesitateaechiprii oricreia dintre presele de vulcanizatmecanice concepute cu frn electromagnetic, celpuin pentru lanul cinematic principal.
practical, of original concept of mechanicalvulcanizing press with screw.
Electrical system of the experimental modelensures changing direction of rotation of the engineaccording to the requirements phase of the program
executed.The electronic system of command and control[4] contains a finite state automaton, which stores allassociated program of working cycle of theexperimental model and commands its execution.Perhaps exaggerating in a certain measure we can talkabout a model of mechanical vulcanizing press, withscrew, with CNC.
Is elaborated a working cycle of the experimentalmodel and a program called ComConME-MVP,in Cprogramming language [5] designed to command thedrive system of experimental model so that it can
execute a cycle kinematic in agreement with thegeneral working cycle of a vulcanizing presses.
It is concludes that the experimental modeldeserves to be filled with electromagnetic disc brake,controlled by program. Because of testing of theexperimental model has resulted the necessity forfitting either of mechanical vulcanizing pressesdesigned with electromagnetic brake, at least for themain kinematic chain.
References1. Pllner, C. (2012) Cercetri inovative privind dezvoltarea unor noi prese de vulcanizat (Innovative research and development of
new vulcanizing presses). PhD Thesis, Transilvania University of Brasov, Romania (in Romanian)2. *** Atmel. 8bit AVR Microcontroller with 2kBytes in-system programmable flash. Available from: www.atmel.com/
Images/doc2543.pdf, Accessed: 30/08/20123. Noga, K.M., Radwanski, M. (2010) Modern Improvements in the Digital Logic Laboratory. Technological Developments in
Networking, Education and Automation, Publisher Springer Netherlands, ISBN 978-90-481-9150-5, p. 109-1144. Levine, W.S. (1999) The control Handbook. CRC Press, ISBN 81-7224-785-0, Boca Raton, Florida, USA5. Kernighan, B.W., Ritchie, D.M. (2008) The C programming language. Available from: http://net.pku.edu.cn/~course/
cs101/2008/resource/The_C_Programming_Language.pdf, Accessed: 30/08/2012
AcknowledgementsThis paper is supported by the Sectoral Operational Programme Human Resources Development (SOP
HRD), financed from the European Social Fund and by the Romanian Government under the contractnumber POSDRU/88/1.5/S/59321.
Lucrare primitn septembrie 2012 Received in September 2012