Pmef Curs 05
12
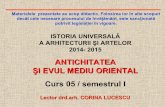
5. MATRICELE DE RIGIDITATE ALE ELEMENTELOR FINITE UZUALE – SOLID BRICK, ÎNVELIŞ SHELL ŞI BARE BEAM Elementul hexaedral cu opt noduri (BRICK8) A. Caracteristici principale ale elementului BRICK8 (Fig. 12.1): 1. este element izoparametric, definit de opt noduri I, J, K, L, M, N, O, P care trebuie declarate în sensul precizat în Fig. 12.1.a; 2. are trei grade de libertate pe nod (GLN = 3), deplasări pe direcŃiile X, Y şi Z (UX, UY, UZ); 3. are forma unui hexaedru oarecare şi poate fi încărcat cu forŃe la noduri; a b Fig. 12.1: Elementul BRICK8 4. elementul se poate folosi pentru modelarea stării 3D de tensiune pentru materiale izotrope şi orice domeniu de analiză, adică acest element poate fi considerat unul dintre cele mai generale tipuri de elemente finite. Cu ajutorul acestui element finit se pot analiza toate componentele unei structuri, fie ele bare, pl ăci sau blocuri. Totuşi, din considerente ale dimensiunilor foarte mari ale modelelor cu elemente finite, acest element finit se foloseşte cu precă dere pentru modelarea stucturilor considerate blocuri (adică prezintă cele trei dimensiuni geometrice comparabile); 5. matricea de rigiditate în coordonate globale este: [ ] [ ][ ] T e V K B D B dV = ∫ , (12.1) în care: [ ] [ ][ ] B N =∂ ; (12.2) este matricea derivatelor funcŃiilor de formă, iar expresia matricelor de derivare este: [] ⋅ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ = ∂ x 0 z y z 0 0 x y z 0 0 0 y 0 0 0 x (12.3)
-
Upload
menthor555 -
Category
Documents
-
view
212 -
download
0
description
Pmef Curs 05
Transcript of Pmef Curs 05
-
5.
MATRICELE DE RIGIDITATE ALE ELEMENTELOR FINITE UZUALE SOLID BRICK, NVELI SHELL I BARE BEAM
Elementul hexaedral cu opt noduri (BRICK8)
A. Caracteristici principale ale elementului BRICK8 (Fig. 12.1): 1. este element izoparametric, definit de opt noduri I, J, K, L, M, N, O, P care trebuie declarate n sensul precizat n Fig. 12.1.a; 2. are trei grade de libertate pe nod (GLN = 3), deplasri pe direciile X, Y i Z (UX, UY, UZ); 3. are forma unui hexaedru oarecare i poate fi ncrcat cu fore la noduri;
a b Fig. 12.1: Elementul BRICK8
4. elementul se poate folosi pentru modelarea strii 3D de tensiune pentru materiale izotrope i orice domeniu de analiz, adic acest element poate fi considerat unul dintre cele mai generale tipuri de elemente finite. Cu ajutorul acestui element finit se pot analiza toate componentele unei structuri, fie ele bare, plci sau blocuri. Totui, din considerente ale dimensiunilor foarte mari ale modelelor cu elemente finite, acest element finit se folosete cu precdere pentru modelarea stucturilor considerate blocuri (adic prezint cele trei dimensiuni geometrice comparabile); 5. matricea de rigiditate n coordonate globale este:
[ ] [ ][ ]TeV
K B D B dV = , (12.1) n care:
[ ] [ ][ ]B N= ; (12.2) este matricea derivatelor funciilor de form, iar expresia matricelor de derivare este:
[ ]
=
x0
z
yz0
0xy
z00
0y
0
00x
(12.3)
-
Funciile de form n coordonate naturale sunt:
( )( )( )( )( )( )( )( )( )( )( )( )t1s1r1
81N
t1s1r181N
t1s1r181N
t1s1r181N
4
3
2
1
+=
++=
+=
=
( )( )( )( )( )( )( )( )( )( )( )( )t1s1r1
81N
t1s1r181N
t1s1r181N
t1s1r181N
8
7
6
5
++=
+++=
++=
+=
(12.4a)
( )( )( )( )( )( )t1t1N
s1s1Nr1r1N
11
10
9
+=
+=
+=
(12.4b)
matricea de rigiditate (elasticitate) a materialului [D] este
[ ] ( )( )
+=
21
021
tricmeSi
0021
000100010001
211ED (12.5)
6. uzual elementul este denumit BRICK8.
B. Date legate de element 1. tipul elementului finit, adic pentru obinerea matricei de rigiditate se pot folosi funciile de form (12.4a), sau, pentru creterea preciziei, se pot folosi i funciile de form (12.4b), caz n care nainte de asamblare matricea de rigiditate a elementului se condenseaz la gradele de libertate corespunztoare celor opt noduri; 2. ordinul de integrare al matricei de rigiditate al elementului, INT (pentru programe de firm se alege automat 2, 3 sau 4);
C. Date despre materialul elementului 1. modulul de elasticitate longitudinal - E; 2. coeficientul lui Poisson - niu; (3). coeficientul de dilatare termic - ; (4). densitatea materialului -DENS; (5). acceleraia gravitational - g sau greutatea specific - = g.
D. Date despre ncrcri 1. blocaje la translaie n direcia X BX, i n direcia Y BY i n direcia Z - BZ; 2. fore la noduri n direcia X FX, Y - FY i Z - FZ; (3). deplasri impuse pe orice direcie; (4). temperaturi n noduri sau n elemente; (5). fore de inerie generate de cmpul gravitaional (pentru care sunt necesare ca date de intrare , g direcia i sensul gravitaiei), sau generate de micarea de rotaie uniform (pentru care trebuie precizate axa de rotaie i viteza unghiular );
-
(6) presiuni distribuite liniar sau constante pe feele elementului, care se identific prin numere de la 1 la 6 (vezi Fig. 12.1.a). Aceste presiuni (sau fore distribuite liniar) se echivaleaz la nodurile elementului cu fore concentrate (vezi Fig. 8.2 pentru care se neglijeaz momentele);
E. Rezultatele analizei 1. deplasrile nodale - UX, UY i UZ (notate i DX, DY i DZ); 2. tensiunile n sistemul global de axe - SX, SY, SZ, SXY SYZ, SXZ, adic tensorul complet al tensiunilor la nodurile elementului, precum i n centrul lui, tensiunile principale S1, S2, S3 i unghiurile corespunztoare de orientare (vezi Fig. 12.1.b, n care s-au figurat doar tensiunile normale). Tensiunile ntr-un nod comun mai multor elemente nu rezult egale. Pentru corectarea rezultatelor, de obicei, se recurge la medierea tensiunilor n noduri folosind diverse metode, cea mai simpl mediere fr a ine seama de volumele elementelor vecine este inclus n programul de calcul (vezi relaia 9.16.a). Tensiunile dintr-un punct P al elementului se determin cu relaia:
[ ][ ]{ }eP UBD
SXZSYZSXYSZSYSX
=
. (12.6)
Se menioneaz c pentru calculul tensiunilor n general se folosete alt tehnic: tensiunile se determin n punctele Gauss 222 (unde se demonstreaz c erorile de calcul a tensiunilor sunt minime) i apoi acestea se expandeaz la noduri folosind funciile de form 12.4a. Pentru elemente hexaedrice puin distorsionate, adic apropiate de un cub, practic tensiunile determinate direct n noduri coincid cu cele expandate din punctele Gauss. Diferene mai mari apar pentru elementele finite care folosesc funcii de form suplimentare (12.4b). Programul dispune de alegerea modului n care se calculeaz tensiunile pe elemente. Tensiunile principale n noduri se pot calcula odat cu calculul tensiunilor n elemente sau tensiunile componente ale tensorului tensiune se pot media la noduri i apoi se pot calcula tensiunile principale S1 > S2 > S3 n noduri. Programul mediaz tensiunile componente i apoi calculeaz tensiunile principale. Tensiunea echivalenta, von Mises - Sech se determina cu relatia (9.18.) (3). deformaiile specifice din element, ntr-un punct P se calculeaza cu relaia:
{ } [ ]{ }eP UB = (12.7) (4). reactiunile din legaturile cu exteriorul.
1. Date generale despre discretizare NN NE 2. Date despre materiale NMAT MATI E niu ...
3. Date despre proprietile elementelor NPROP PROPI TIPE INT ...
4. Date despre noduri NI BX BY BZ X Y Z ...
5. Date despre elemente EI I J K L M N O P MAT PROP
-
...
6. Date despre ncrcri cu fore n noduri NF NIF FX FY FZ ...
G. Programul de lucru BRICK8.EXE Acest program a fost conceput s lucreze cu noiunile (datele) de la punctele B-E neincluse ntre paranteze.
Elementul shell cu opt noduri (SHELL8)
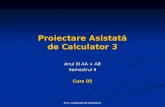
A. Caracteristici principale ale elementului SHELL8 (Fig. 13.1): 1. este definit de opt noduri I, J, K, L, M, N, O, P care trebuie declarate conform figurii 13.1 i prezint o formulare izoparametric; 2. are ase grade de libertate pe nod (GLN = 6), deplasri pe direciile X, Y i Z (UX, UY, UZ) i rotiri n jurul axelor X, Y, Z (RotX, RotY, RotZ) aa cum se prezint n figura 13.2; 3. are forma unui patrulater plan oarecare - coninut n planul xy al sistemului de referin local legat de element, are grosimea constant t, laturile pot fi drepte sau curbe. Elementul poate fi ncrcat cu fore i momente n noduri raportate la sistemul de referin global XYZ, precum i cu presiuni normale pe cele ase fee marcate cu 1-6.
Fig. 13.1: Elementul SHELL8
Fig. 13.2: Gradele de libertate i ncrcrile nodale ale elementului SHELL8
Presiunile se consider pozitive dac intr n element. Formularea teoretic a elementului consider suprafaa median (Middle surface) perfect plan, deci abaterile de la planeitate introduc erori n formularea matricei de rigiditate. Faa pozitiv (obinut prin regula urubului drept aplicat numerotrii I J K - L) poart denumirea de fa superioar sau Top iar faa negativ poart denumirea de fa inferioar sau Bottom; 4. elementul se poate folosi pentru modelarea nveliurilor i plcilor de grosime constant pe poriuni, adic din componena unor structuri preponderent realizate din table, considerate materiale izotrope;
-
5. matricea de rigiditate n coordonate locale se obine prin suprapunerea matricei de rigiditate de membran cu matricea de rigiditate de plac (ncovoiere) ca n figura 13.3. Se menioneaz c formularea matricei de rigiditate membran nu conine gradele de libertate z (drilling = de sfredelire) acestea fiind introduse ntr-un mod aproximativ prin intermediul matricei [kt]. Matricea de rigiditate a elementului n coordonate locale se poate scrie simbolic
[ ] { }
[ ] [ ] [ ]
[ ] [ ] [ ]
[ ] [ ] [ ]
=
yi
xi
i
zi
i
i
p
t
m
w
v
u
k
k
k
uk
24248241624
24888168
24168161616
1484848
00
00
00
, (13.1)
n care { }Ti uuuu 821 = .a.m.d. sunt gradele de libertate nodale n sistemul de referin local xyz.
Element Membran + Element Plac = Element Shell
Fig. 13.3: Formarea elementului plan Shell8
Cele trei matrice nenule din (13.1) se obin din relaiile: [ ] [ ] [ ][ ]= V mmTmm dVBDBk , (13.2)
[ ]
=
11
11
11
11
EVkt , (13.3)
[ ] [ ] [ ][ ]= V ppTpp dVBDBk , (13.4) n care [ ]mB i [ ]pB se obin prin derivarea funcilor de form, avnd n vedere aproximaiile cmpului deplasrilor. [ ]mD i [ ]pD sunt matricele de rigiditate ale materialului, prezentate mai jos, iar E este modulul de elasticitate longitudinal, V este volumul elementului finit,
71
= , iar coeficientul s-a ales 0,003. Matricea [ ]tk a fost aleas astfel nct s nlture singularitatea matricei [ ]k i s poat reprezenta micrile de corp rigid relativ la gradele de libertate rotiri normale la elementul finit. Funciile de form sunt definite n coordonate naturale i :
( ) ( ) ( )++= 11141N1 ; ( )( )= 112
1N 25 ;
( ) ( ) ( )++= 11141N2 ; ( ) ( )26 112
1N += ;
(13.5)
-
( ) ( ) ( )++= 11141N3 ; ( )( )+= 112
1N 27 ;
( ) ( ) ( )++= 11141N4 ; ( ) ( )28 112
1N = .
Matricele de rigiditate (elasticitate) ale materialului sunt
[ ]
=
2100
0101
1 2
EDm ; [ ]
=
G
GG
EEEE
Dp
0000
00000000000000
, (13.6)
n care ( )+= 12EG este modulul de elasticitate transversal al materialului; este coeficientul lui
Poisson iar
+=225
2,01;2,1maxt
A este un coeficient de corecie pentru distribuia parabolic a
tensiunilor de forfecare care se consider constant pe grosimea elementului; A este aria elementului finit. Aproximarea cmpului deplasrilor n interiorul elementelor finite pentru deplasrile de membran, respectiv plac se face cu relaiile:
=
= i
i
i i
i
v
u
NN
v
u 8
1 00
;
=
=
yi
xi
i
ii
i
i w
NzN
zN
w
v
u
8
1 0000
00. (13.7)
Deoarece funciile de form sunt definite n coordonate naturale, derivarea n raport cu coordonatele x i y implic folosirea derivatelor funciilor compuse i deci calculul inversei Jacobianului [J]. Dac se folosesc notaiile
[ ]
=
2221
12111
JJJJ
J ;
+
=
+
=
ii
i
iii
NJNJb
NJNJa
2221
1211
, (13.8)
atunci matricele derivatelor funciilor de form rezult din
{ } [ ]{ }116163
8
10
0
=
=
=
= mmi
i
iii
i
i
xy
y
x
m dBv
u
abb
a
; (13.9a)
{ } [ ]{ }124245
8
1
00
000
00
=
=
=
= ppyi
xi
i
i
ii
ii
ii
i
i
xz
yz
xy
y
x
p dBw
NaNb
zbzazb
za
, (13.9b)
n care { }md i { }pd sunt componentele vectorilor deplasare n coordonate locale. Integralele (13.2) i (13.4) se transform n integrale de suprafa deoarece integrarea pe direcia z (grosimea plcii) se face fr dificulti analitic. Totui integralele de suprafa n coordonate naturale se efectueaz numeric folosind integrarea Gauss-Legendre n minim 2 2 puncte Gauss.
-
Odat cunoscut matricea de rigiditate n coordonate locale se poate determina matricea de rigiditate a elementului n coordonate globale folosind relaia de transformare
[ ] [ ] [ ] [ ]4848484848484848
= TkTK Te , (13.10) n care matricea de transformare [ ]T este funcie de matricea [ ] a cosinusurilor directoare dintre cele dou sisteme de referin local-global
[ ] [ ] 16,,2,1 == idiagT ;
=
333
222
111
][nmlnmlnml
(13.11)
6. n aceast lucrare elementul este denumit SHELL8 dei n unele programe de firm formulrile, respectiv denumirea poate fi alta.
B. Date legate de element 1. grosimea elementului finit t, pentru un element Shell n alte dezvoltri i implementri este posibil a defini grosimi diferite n cele patru noduri I, J, K, L; 2. ordinul de integrare pentru calculul numeric al matricei de rigiditate cu cele dou componente membran i plac, INTM i INTP care de regul se aleg 2, (pentru programe de firm se alege automat 2 sau 3 sau se recurge la tehnici speciale de integrare);
C. Date despre materialul elementului 1. modulul de elasticitate longitudinal - E; 2. coeficientul lui Poisson - niu; (3). coeficientul de dilatare termic - ; (4). densitatea materialului -DENS; (5). acceleraia gravitational - g sau greutatea specific - = g.
D. Date despre ncrcri 1. deplasri i rotiri impuse nule n sistemul global de coordonate (sau blocaje) la translaie BX, BY, BZ i rotaie BXX, BYY, BZZ; 2. fore la noduri n direcia X FX, Y - FY i Z FZ precum i momente n jurul axelor X MX, Y MY, Z MZ; 3. presiuni distribuite liniar (biliniar) sau constante pe feele elementului, care se identific prin numere de la 1 la 6 (vezi Fig. 13.1). Aceste presiuni se echivaleaz numeric la nodurile elementului cu fore concentrate conform relaiei { } [ ] { }dApNF T
Ae = . (13.12)
Se menioneaz c aceast echivalare (coerent funciilor de form) conduce la ditribuii de fore nodale care aparent par bizare. Spre exemplu echivalarea unor presiuni constante pe un element dreptunghiular se prezint n Fig. 13.4; (4). deplasri impuse pe orice direcie; (5). temperaturi n noduri sau n elemente; (6). fore de inerie generate de micarea accelerat (sau cmpul gravitaional g), pentru care sunt necesare ca date de intrare , g direcia i sensul acceleraiei, sau generate de micarea de rotaie uniform, pentru care trebuie precizate axa de rotaie i viteza unghiular ;
-
Fig. 13.4: Echivalarea presiunilor pe un element Shell8 dreptunghiular
E. Rezultatele analizei 1. deplasrile nodale - UX, UY, UZ (notate uneori DX, DY i DZ) i rotirile RX, RY, RZ (notate i RotX, RotY, RotZ); 2. tensiunile n sistemul global de axe - SX, SY, SZ, SXY SYZ, SXZ, adic tensorul complet al tensiunilor la nodurile elementului, precum i n centrul lui pentru feele Top, Middle i Bottom, tensiunile principale S1, S2, S3 i unghiurile corespunztoare de orientare cosinusurile directoare. Tensiunile ntr-un nod comun mai multor elemente nu rezult egale. Pentru corectarea rezultatelor, de obicei, se recurge la medierea tensiunilor n noduri folosind diverse metode, cea mai simpl mediere fr a ine seama de volumele elementelor vecine este inclus n programul de calcul (vezi relaia 9.16.a). Tensiunile dintr-un punct oarecare (de coordonate , i z) al elementului se determin mai nti n sistemul de coordonate local pentru cele dou componente de membran i plac (vezi Fig. 13.5) cu relaiile:
{ } { } [ ]{ }mmTxyyxm D == ; (13.13a) { } { } [ ]{ }ppTxzyzxyyxp D == , (13.13a)
n care { }m i { }p se determin cu relaiile (13.9) n care vectorii deplasrilor nodale n coordonate locale { }md i { }pd se obin prin transformarea deplasrilor globale (care sunt obinute prin rezolvarea sistemului de ecuaii) n deplasri locale { } [ ]{ }ee UTu = . Vectorii { }md i { }pd sunt componente ale vectorului { }eu .
a) Tensiuni de membran b) Tensiuni de plac
Fig. 13.5: Componentele tensiunilor locale ( n sistemul de referin al elementului) pentru elementul SHELL8 obinute conform formulrii teoretice
Tensiunile totale n coordonate locale se obin prin suprapunere de efecte, adic { } { } { }pm += n care adunarea se face pe componente. De obicei tensiunile se calculeaz ntr-un numr limitat de puncte
-
(nodurile elementului i centrul su) alese de pe feele Top, Middle i Bottom. Se observ c din calcul tensiunile z sunt nule, iar pentru corecie n faza de postprocesare programul atribuie pz = pe faa n care exist presiune aplicat cu variaie liniar la zero pe faa opus dar numai pentru feele 1 i 2. Tensiunile locale dintr-un punct sunt transformate n tensiuni globale (n sistemul de referin global) folosind relaia
+++
+++
+++=
xz
yz
xy
z
y
x
T
nnnmnmmmnnmm
nnnmnmmmnnmm
nnnmnmmmnnmm
nnmmnm
nnmmnm
nnmmnm
SXZSYZSXYSZSYSX
311331133113131313
233223322332323232
122112211221212121
33333323
23
23
22222222
22
22
11111121
21
21
222222222
(13.14)
Pentru creterea preciziei tensiunile se determin de regul n punctele Gauss 22 (unde valorile sunt cel mai bine estimate) i apoi acestea se expandeaz la noduri folosind funciile de form 9.14. Programul dispune de alegerea modului n care se calculeaz tensiunile pe elemente: direct n nodurile elementului sau n punctele Gauss din care mai apoi tensiunile se expandeaz la noduri. Tensiunile principale n noduri se pot calcula odat cu calculul tensiunilor n elemente sau tensiunile componente ale tensorului tensiune se pot media la noduri i apoi se pot calcula tensiunile principale S1 > S2 > S3 n noduri. Programul mediaz tensiunile componente i apoi calculeaz tensiunile principale. Tensiunea echivalenta, von Mises - Sech se determina cu relatia (9.18.) (3). deformaiile specifice din element n coordonate locale, ntr-un punct oarecare se calculeaza cu relaiile (13.9) i apoi se pot transforma similar tensiunilor, dar programul sare aceast etap pentru a reduce volumul rezultatelor. (4). reactiunile din legaturile cu exteriorul.
F. Structura fiierului cu date de intrare este: 1. Date generale despre discretizare NN NE 2. Date despre materiale NMAT MATI E niu ...
3. Date despre proprietile elementelor NPROP PROPI t INTM INTP ...
4. Date despre noduri NI BX BY BZ BXX BYY BZZ X Y Z ...
5. Date despre elemente EI I J K L M N O P MAT PROP ...
6. Date despre ncrcri cu fore n noduri NF NIF FX FY FZ MX MY MZ ...
7. Date despre ncrcri cu presiuni pe elemente NEP EIP FATA P1 P2 P3 P4 ...
-
G. Programul de lucru SHELL8w_re.EXE Acest program a fost conceput s lucreze cu noiunile (datele) de la punctele B-E neincluse ntre paranteze.
Elementul finit Beam3D
Se consider un element finit de tip grind, de seciune oarecare, dar constant pe lungime (Fig. 1.1). Acesta este definit de dou noduri de capt I i J n care se introduc cele ase componente ale deplasrilor (deplasri i rotiri) drept grade de libertate i un nod de orientare K, care precizeaz direcia principal a seciunii y. Axa barei x, este definit de la nodul I la nodul J, iar axa principal z a seciunii se obine considernd sistemul de referin cartezian drept. Celor ase grade de libertate din fiecare nod, ordonate UX, UY, UZ, RX, RY i RZ le corespund forele i momentele nodale FX, FY, FZ, MX, MY i MZ. n sistemul de referin local xyz se definesc eforturile la nivelul elementului N, Ty, Tz, Mt, My i Mz, pozitive atunci cnd respect sensurile din Fig. 1.1. Elementul finit grind are contribuii la ecuaia de micare a structurii n matricea de rigiditate i de mas. Formularea general a elementului, pentru calculul matricei de rigiditate corespunde grinzii Timoshenko, dar poate fi redus i la formularea Euler-Bernoulli, prin intermediul parametrului TipK. Pentru fiecare element de tip grind, se precizeaz, prin intermediul unui set de proprieti asociat seciunii respective, aria seciunii A (A), momentele de inerie principale yI = Iy i zI = Iz i momentul convenional la rsucire tI = It precum i coeficienii de forfecare y = Fiy i z = Fiz. Coeficientul de forfecare este definit ca raportul dintre aria total i aria de forfecare, deci are valori supraunitare spre deosebire de inversul lui factorul de forfecare, care este subunitar. Din coordonatele nodurilor I i J rezult lungimea L, iar dac se ine seama i de coordonatele nodului K se determin complet orientarea barei n spaiu. Din materialul atribuit elementului de grind rezult modulul de elasticitate longitudinal E, coeficientul lui Poisson i densitatea .
Fig. 1.1: Elementul finit Beam3D.
-
Matricea de rigiditate a elementului n formularea Timoshenko (cu includerea efectului forei tietoare n calculul deplasrilor), n sistemul de referin local [28], este
1 5 1 5
2 6 2 6
6 3 6 7
5 4 5 8
1 5 1 5
2 6 2 6
6 7 6 3
5 8
0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0
N N
T T
e
BN N
T T
v v
v v v v
v v v v
v v
v v v v
v v v vk
v v
v v v v
v v v v
v v
v v v v
v v
=
5 40 0 0v v
, (1.2)
n care
( )1 312
1z
y
EIv
L=
+; ( )2 3
121
y
z
EIv
L=
+;
( )( )341
z y
z
EIv
L
+=
+;
( )( )441
y z
y
EIv
L
+=
+; ( )5 2
61
z
y
EIv
L=
+; ( )6 2
61
y
z
EIv
L=
+;
( )( )721
z y
z
EIv
L
=
+;
( )( )821
y z
y
EIv
L
=
+; N
EAv
L= ; tT
GIv
L= 2
12 y zy
EIGAL
= ; 212 z y
z
EIGAL
= i ( )2 1EG
=
+.
Dac se consider formularea Euler-Bernoulli (TipK = 1), atunci se consider 0y z = = , sau echivalent y = 0 i z = 0.
Matricea de mas prezint dou formulri care se identific prin parametrul TipM. Pentru formularea matrice de mas diagonal (TipM = 1), n coordonate locale, se consider
[ ]( )1 1 1 2 3 3 1 1 1 2 3 3diageBm v v v v v v v v v v v v = , (1.3) n care 1 2
ALv
= ; 2 2
tLIv = ; 3
3 24AL
v
= .
Dac matricea de mas este coerent cu funciile de form statice (TipM = 2), atunci n programele de fa se consider 0== zy i rezult
-
1 2 3 4
5 6 7 8
6 9 8 10
2 11 4 12
3 4 1 2
7 8 5 6
8 10 6 9
4
0 0 0 0 0 2 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 0 2 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 0
2 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 2 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0
N N
T T
e
BN N
T T
v v
v v v v
v v v v
v v
v v v v
v v v vm
v v
v v v v
v v v v
v v
v v v v
v
=
12 2 110 0 0 0v v v
, (1.4)
n care
3NAL
v
= ; 3
tT
LIv
= ; 1 2
61335 5
zIv ALAL
= +
; 211210 10
zILv ALAL
= +
; 3 269
70 5zIv AL
AL =
;
4613
420 10zILv AL
AL = +
; 5 2
61335 5
yIv AL
AL = +
; 6
11210 10
yILv AL
AL = +
; 7 2
6970 5
yIv AL
AL =
;
8613
420 10yIL
v ALAL
=
; 2
92
105 15yIL
v ALA
= +
; 2
10 140 30yIL
v ALA
= +
; 2
112
105 15zILv ALA
= +
;
2
12 140 30zILv ALA
= +
.
Transformarea matricelor n sistemul de referin global se face cu relaiile de transformare
Te e e e
B BK T k T = ; T
e e e e
B BM T m T = , (1.5)
n care matricea de transformare eT conine cosinusurile directoare , m, n ale unghiurilor formate de axele de coordonate ale celor dou sisteme de referin local-global (vezi Fig. 1.1), aranjate astfel:
Axele X Y Z
x 1 1m 1n
y 2 2m 2n
z 3 3m 3n
Dac matricea cosinusurilor directoare, numit i matricea de rotaie, se noteaz
[ ]1 1 1
2 2 2
3 3 3
m n
m n
m n
=
, (1.6)
atunci matricea de transformare devine
[ ] [ ] [ ] [ ]( )diageT = . (1.7)