Optimizare topologica
12
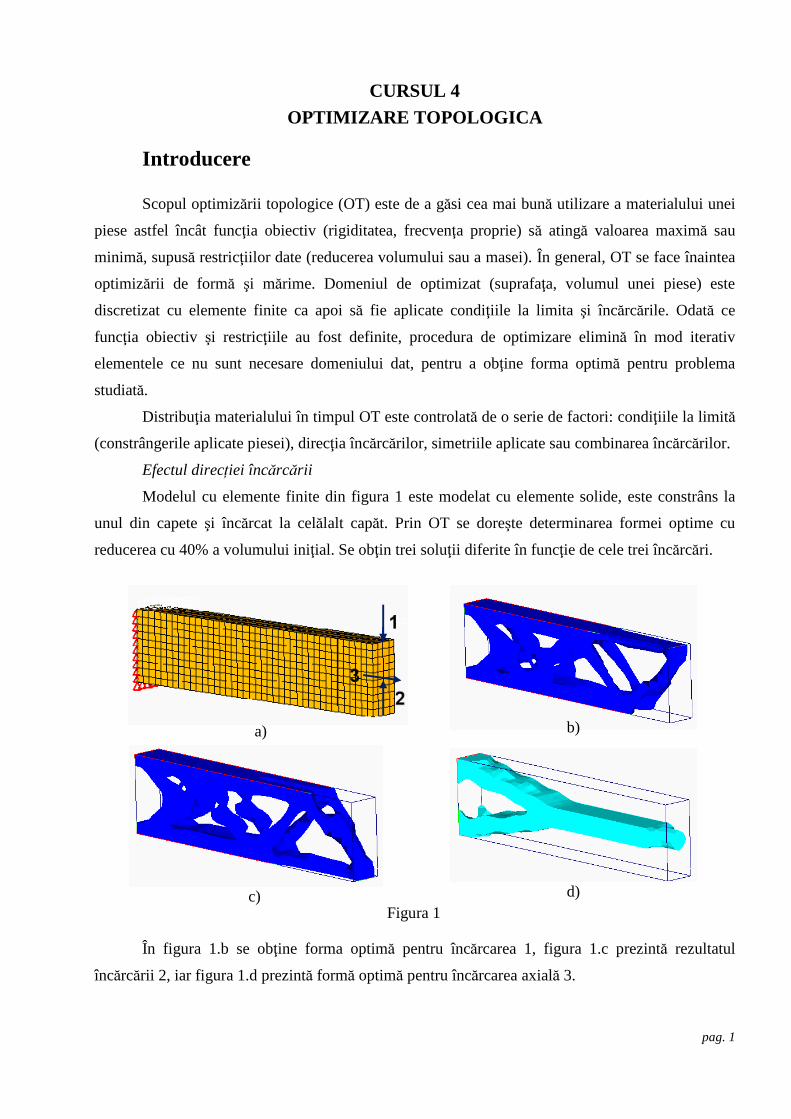
pag. 1 CURSUL 4 OPTIMIZARE TOPOLOGICA Introducere Scopul optimizării topologice (OT) este de a găsi cea mai bună utilizare a materialului unei piese astfel încât funcţia obiectiv (rigiditatea, frecvenţa proprie) să atingă valoarea maximă sau minimă, supusă restricţiilor date (reducerea volumului sau a masei). În general, OT se face înaintea optimizării de formă şi mărime. Domeniul de optimizat (suprafaţa, volumul unei piese) este discretizat cu elemente finite ca apoi să fie aplicate condiţiile la limita şi încărcările. Odată ce funcţia obiectiv şi restricţiile au fost definite, procedura de optimizare elimină în mod iterativ elementele ce nu sunt necesare domeniului dat, pentru a obţine forma optimă pentru problema studiată. Distribuţia materialului în timpul OT este controlată de o serie de factori: condiţiile la limită (constrângerile aplicate piesei), direcţia încărcărilor, simetriile aplicate sau combinarea încărcărilor. Efectul direcției încărcării Modelul cu elemente finite din figura 1 este modelat cu elemente solide, este constrâns la unul din capete şi încărcat la celălalt capăt. Prin OT se doreşte determinarea formei optime cu reducerea cu 40% a volumului iniţial. Se obţin trei soluţii diferite în funcţie de cele trei încărcări. În figura 1.b se obţine forma optimă pentru încărcarea 1, figura 1.c prezintă rezultatul încărcării 2, iar figura 1.d prezintă formă optimă pentru încărcarea axială 3. a) b) c) d) Figura 1
description
Optimizare topologica
Transcript of Optimizare topologica
pag. 1
CURSUL 4 OPTIMIZARE TOPOLOGICA
Introducere
Scopul optimizării topologice (OT) este de a găsi cea mai bună utilizare a materialului unei
piese astfel încât funcţia obiectiv (rigiditatea, frecvenţa proprie) să atingă valoarea maximă sau
minimă, supusă restricţiilor date (reducerea volumului sau a masei). În general, OT se face înaintea
optimizării de formă şi mărime. Domeniul de optimizat (suprafaţa, volumul unei piese) este
discretizat cu elemente finite ca apoi să fie aplicate condiţiile la limita şi încărcările. Odată ce
funcţia obiectiv şi restricţiile au fost definite, procedura de optimizare elimină în mod iterativ
elementele ce nu sunt necesare domeniului dat, pentru a obţine forma optimă pentru problema
studiată.
Distribuţia materialului în timpul OT este controlată de o serie de factori: condiţiile la limită
(constrângerile aplicate piesei), direcţia încărcărilor, simetriile aplicate sau combinarea încărcărilor.
Efectul direcției încărcării
Modelul cu elemente finite din figura 1 este modelat cu elemente solide, este constrâns la
unul din capete şi încărcat la celălalt capăt. Prin OT se doreşte determinarea formei optime cu
reducerea cu 40% a volumului iniţial. Se obţin trei soluţii diferite în funcţie de cele trei încărcări.
În figura 1.b se obţine forma optimă pentru încărcarea 1, figura 1.c prezintă rezultatul
încărcării 2, iar figura 1.d prezintă formă optimă pentru încărcarea axială 3.
a) b)
c) d) Figura 1
pag. 2
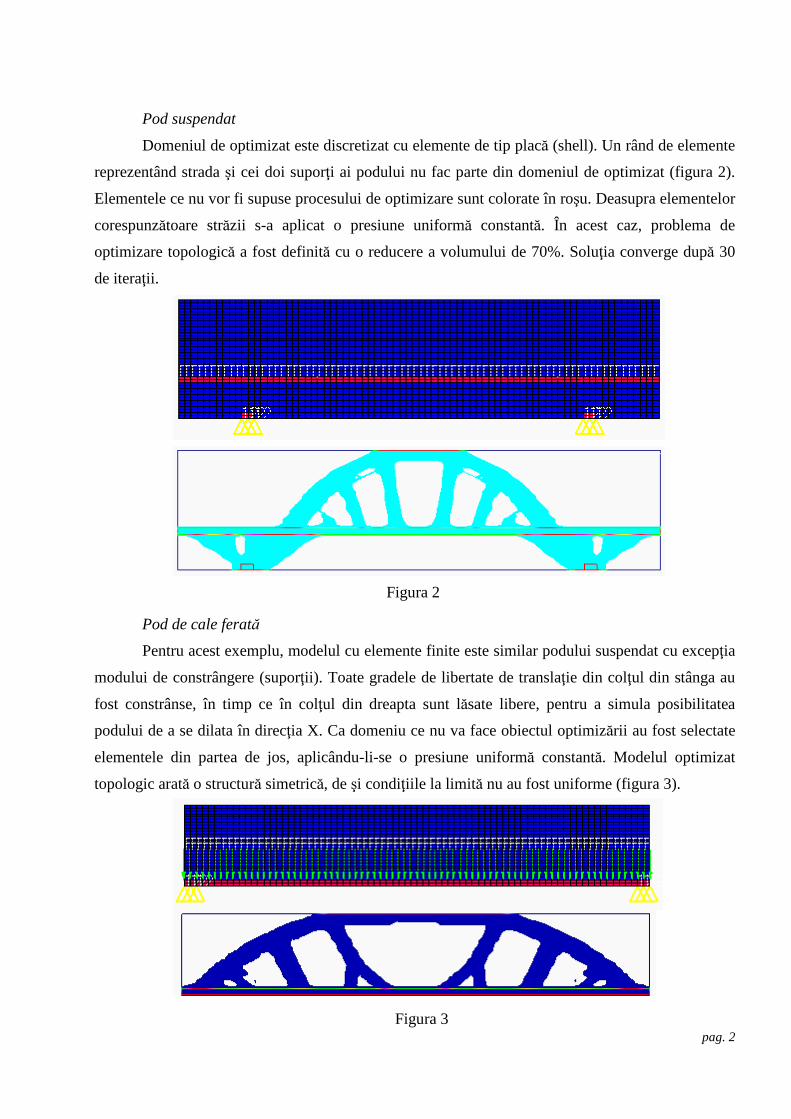
Pod suspendat
Domeniul de optimizat este discretizat cu elemente de tip placă (shell). Un rând de elemente
reprezentând strada şi cei doi suporţi ai podului nu fac parte din domeniul de optimizat (figura 2).
Elementele ce nu vor fi supuse procesului de optimizare sunt colorate în roşu. Deasupra elementelor
corespunzătoare străzii s-a aplicat o presiune uniformă constantă. În acest caz, problema de
optimizare topologică a fost definită cu o reducere a volumului de 70%. Soluţia converge după 30
de iteraţii.
Pod de cale ferată
Pentru acest exemplu, modelul cu elemente finite este similar podului suspendat cu excepţia
modului de constrângere (suporţii). Toate gradele de libertate de translaţie din colţul din stânga au
fost constrânse, în timp ce în colţul din dreapta sunt lăsate libere, pentru a simula posibilitatea
podului de a se dilata în direcţia X. Ca domeniu ce nu va face obiectul optimizării au fost selectate
elementele din partea de jos, aplicându-li-se o presiune uniformă constantă. Modelul optimizat
topologic arată o structură simetrică, de şi condiţiile la limită nu au fost uniforme (figura 3).
Figura 2
Figura 3
pag. 3
Modelul cu elemente finite Pentru definirea modelului cu elemente finite se vor putea folosi numai tipurile de elemente
permise pentru astfel de optimizare. Ansys suportă următoarele tipuri de elemente finite pentru
optimizare topologică:
Solid 2D PLANE2 sau PLANE82
Solid 3D SOLID92 sau SOLID95
Placă SHELL93
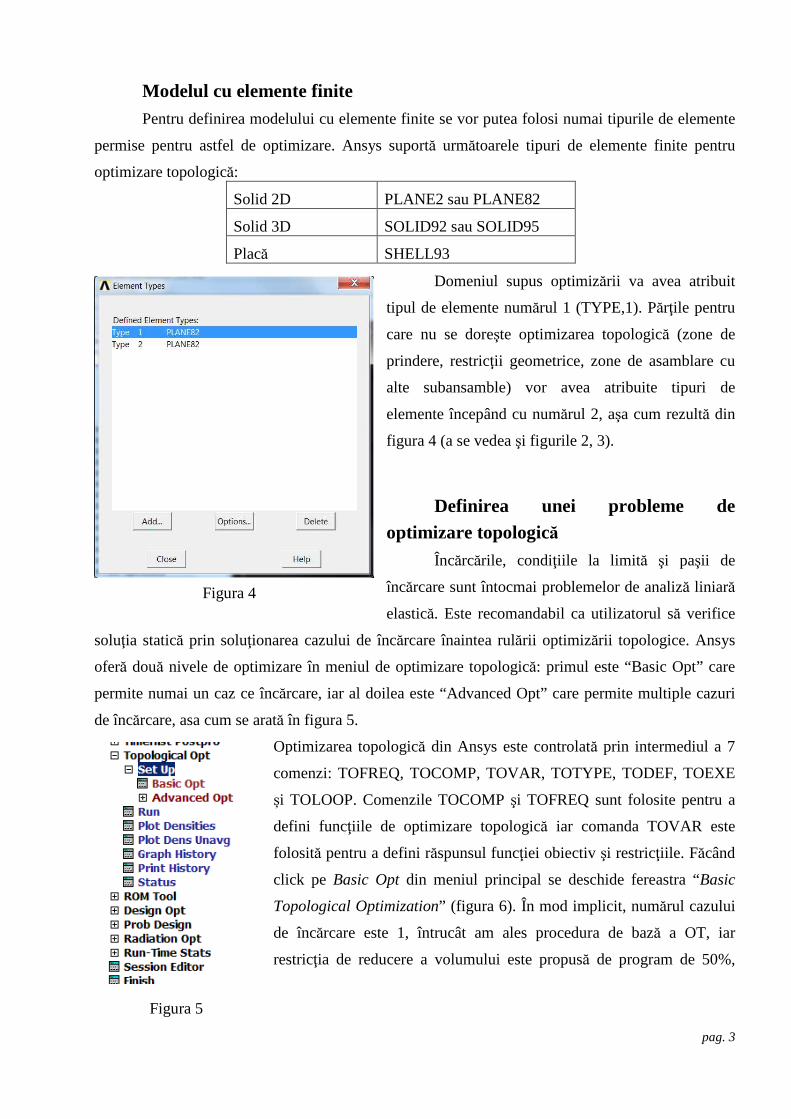
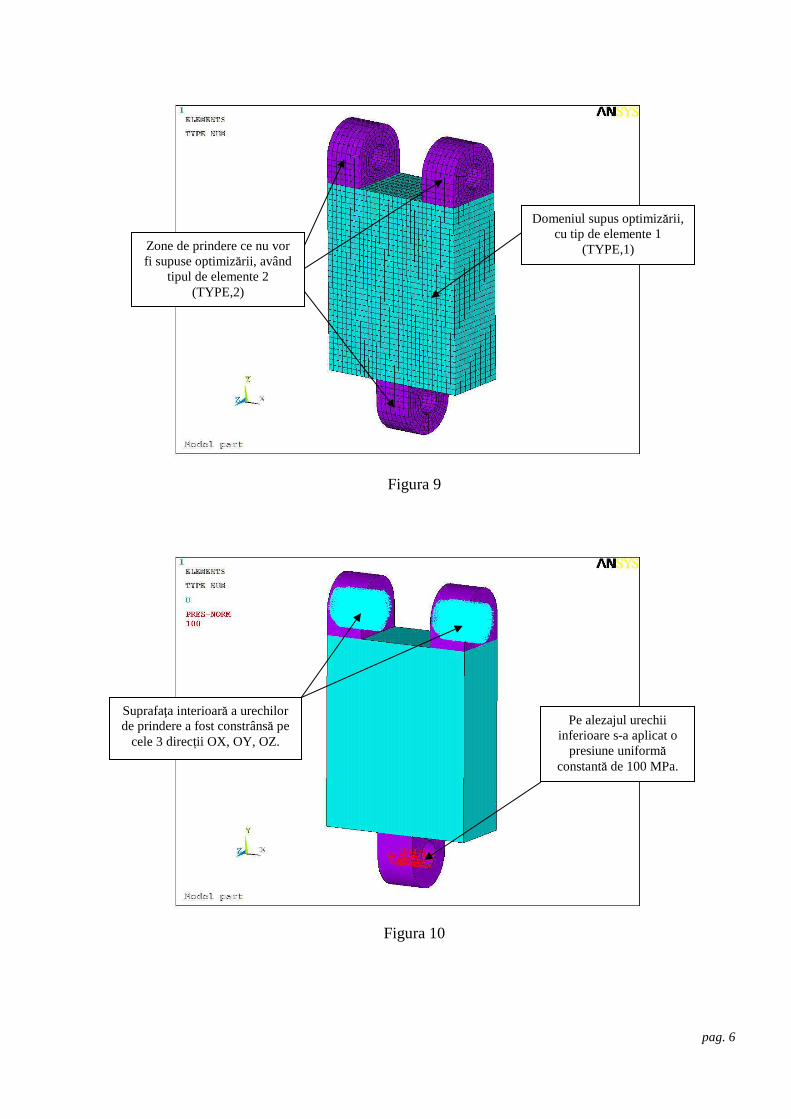
Domeniul supus optimizării va avea atribuit
tipul de elemente numărul 1 (TYPE,1). Părţile pentru
care nu se doreşte optimizarea topologică (zone de
prindere, restricţii geometrice, zone de asamblare cu
alte subansamble) vor avea atribuite tipuri de
elemente începând cu numărul 2, aşa cum rezultă din
figura 4 (a se vedea şi figurile 2, 3).
Definirea unei probleme de optimizare topologică
Încărcările, condiţiile la limită şi paşii de
încărcare sunt întocmai problemelor de analiză liniară
elastică. Este recomandabil ca utilizatorul să verifice
soluţia statică prin soluţionarea cazului de încărcare înaintea rulării optimizării topologice. Ansys
oferă două nivele de optimizare în meniul de optimizare topologică: primul este “Basic Opt” care
permite numai un caz ce încărcare, iar al doilea este “Advanced Opt” care permite multiple cazuri
de încărcare, asa cum se arată în figura 5.
Optimizarea topologică din Ansys este controlată prin intermediul a 7
comenzi: TOFREQ, TOCOMP, TOVAR, TOTYPE, TODEF, TOEXE
și TOLOOP. Comenzile TOCOMP şi TOFREQ sunt folosite pentru a
defini funcţiile de optimizare topologică iar comanda TOVAR este
folosită pentru a defini răspunsul funcţiei obiectiv şi restricţiile. Făcând
click pe Basic Opt din meniul principal se deschide fereastra “Basic
Topological Optimization” (figura 6). În mod implicit, numărul cazului
de încărcare este 1, întrucât am ales procedura de bază a OT, iar
restricţia de reducere a volumului este propusă de program de 50%,
Figura 4
Figura 5
pag. 4
ceea ce înseamnă că volumul piesei poate scădea cu până la 50% din volumul inițial, în timp de
energia de deformare va fi minimizată.
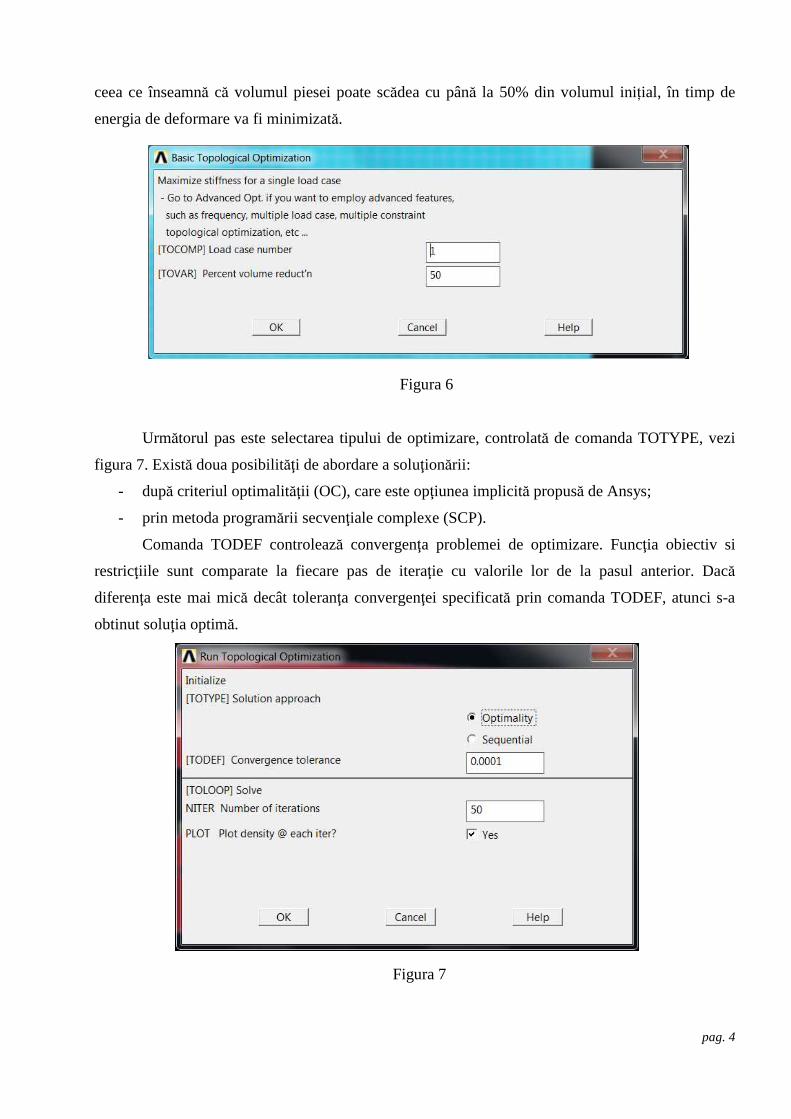
Următorul pas este selectarea tipului de optimizare, controlată de comanda TOTYPE, vezi
figura 7. Există doua posibilităţi de abordare a soluţionării:
- după criteriul optimalităţii (OC), care este opţiunea implicită propusă de Ansys;
- prin metoda programării secvenţiale complexe (SCP).
Comanda TODEF controlează convergenţa problemei de optimizare. Funcţia obiectiv si
restricţiile sunt comparate la fiecare pas de iteraţie cu valorile lor de la pasul anterior. Dacă
diferenţa este mai mică decât toleranţa convergenţei specificată prin comanda TODEF, atunci s-a
obtinut soluţia optimă.
Figura 6
Figura 7
pag. 5
Numărul maxim de iteraţii permise la rularea unei analize de optimizare topologică este 100
şi este controlat prin comanda TOLOOP. Dacă problema nu converge în maxim 100 iteraţii, soluţia
este oprită înainte de a atinge valoarea optimă. Un număr de 50 de iteraţii se dovedeşte adesea ca
fiind suficient în cazul problemelor cu geometrii şi condiţii de încărcări cel mult medii. Pentru a
putea urmări modul în care Ansys rezolvă fiecare iteraţie, se poate bifa opţiunea PLOT “Plot
density @ each iter?”. Rularea se opreşte când, între două iteraţii, nu se mai pot „scoate” elemente
din model, cu respectarea restricţiei de reducere a volumului cu 50%.
Rezultatele optimizării topologice sunt salvate de către Ansys în fişierul de rezultate *.rst.
Pentru vizualizarea rezultatului optimizării se poate folosi comanda "Plot Densities". Densitatea
elementelor (elementală – a nu se confunda cu densitatea materialului piesei!) are valori cuprinse
între 0 şi 1. Ansys reduce densitatea la 0 (acolo unde nu este nevoie de material în urma
optimizării), aşa cum se arată în figurile 1, 2 şi 3.
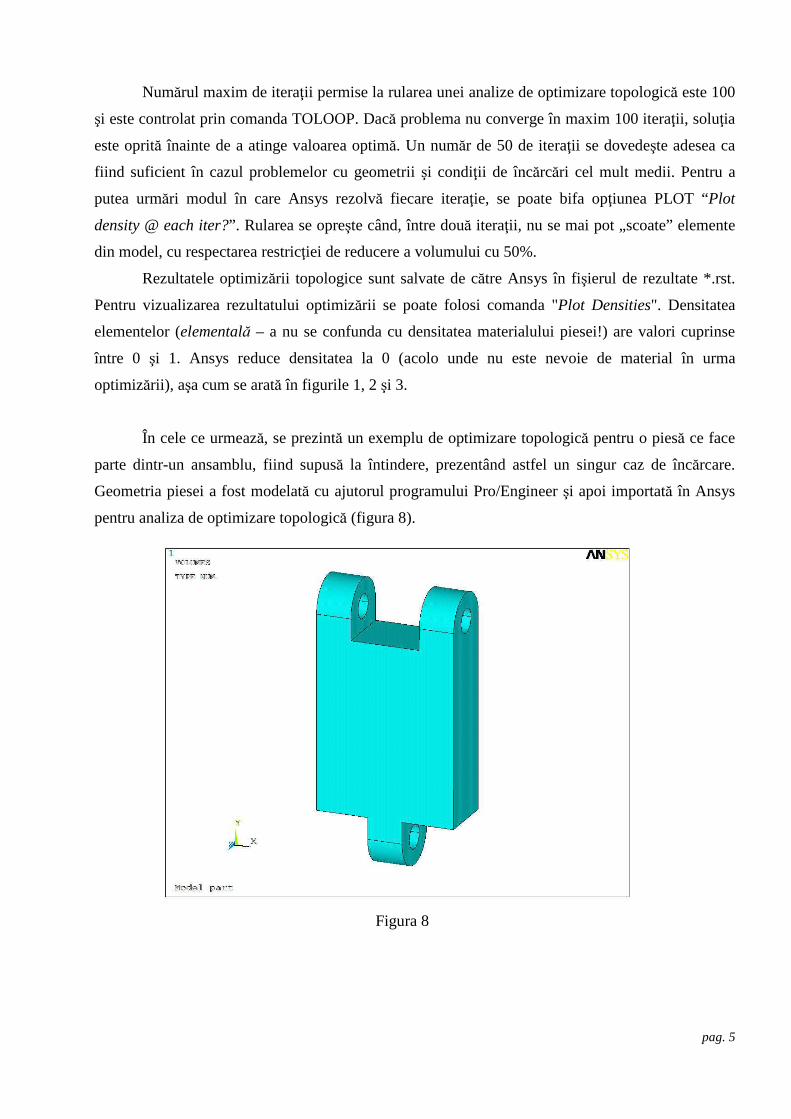
În cele ce urmează, se prezintă un exemplu de optimizare topologică pentru o piesă ce face
parte dintr-un ansamblu, fiind supusă la întindere, prezentând astfel un singur caz de încărcare.
Geometria piesei a fost modelată cu ajutorul programului Pro/Engineer şi apoi importată în Ansys
pentru analiza de optimizare topologică (figura 8).
Figura 8
pag. 6
Zone de prindere ce nu vor fi supuse optimizării, având
tipul de elemente 2 (TYPE,2)
Domeniul supus optimizării, cu tip de elemente 1
(TYPE,1)
Figura 9
Figura 10
Suprafaţa interioară a urechilor de prindere a fost constrânsă pe
cele 3 direcții OX, OY, OZ.
Pe alezajul urechii inferioare s-a aplicat o
presiune uniformă constantă de 100 MPa.
pag. 7
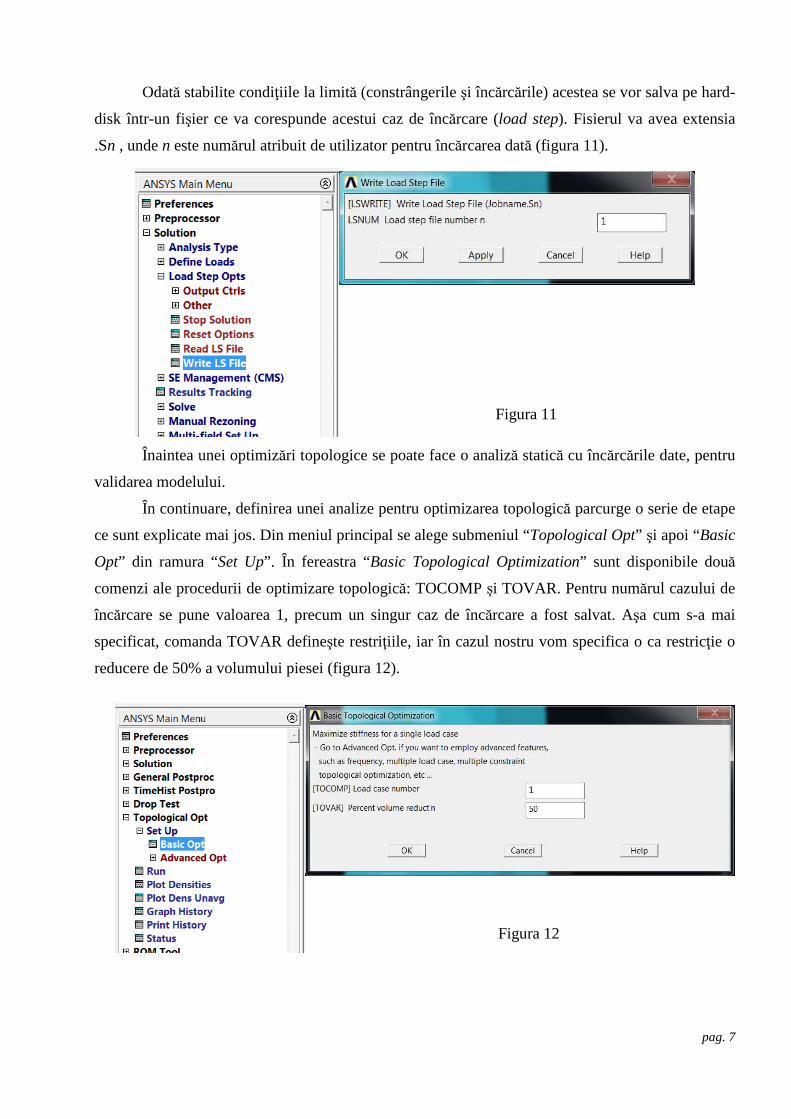
Odată stabilite condiţiile la limită (constrângerile şi încărcările) acestea se vor salva pe hard-
disk într-un fişier ce va corespunde acestui caz de încărcare (load step). Fisierul va avea extensia
.Sn , unde n este numărul atribuit de utilizator pentru încărcarea dată (figura 11).
Înaintea unei optimizări topologice se poate face o analiză statică cu încărcările date, pentru
validarea modelului.
În continuare, definirea unei analize pentru optimizarea topologică parcurge o serie de etape
ce sunt explicate mai jos. Din meniul principal se alege submeniul “Topological Opt” şi apoi “Basic
Opt” din ramura “Set Up”. În fereastra “Basic Topological Optimization” sunt disponibile două
comenzi ale procedurii de optimizare topologică: TOCOMP și TOVAR. Pentru numărul cazului de
încărcare se pune valoarea 1, precum un singur caz de încărcare a fost salvat. Aşa cum s-a mai
specificat, comanda TOVAR defineşte restriţiile, iar în cazul nostru vom specifica o ca restricţie o
reducere de 50% a volumului piesei (figura 12).
Figura 11
Figura 12
pag. 8
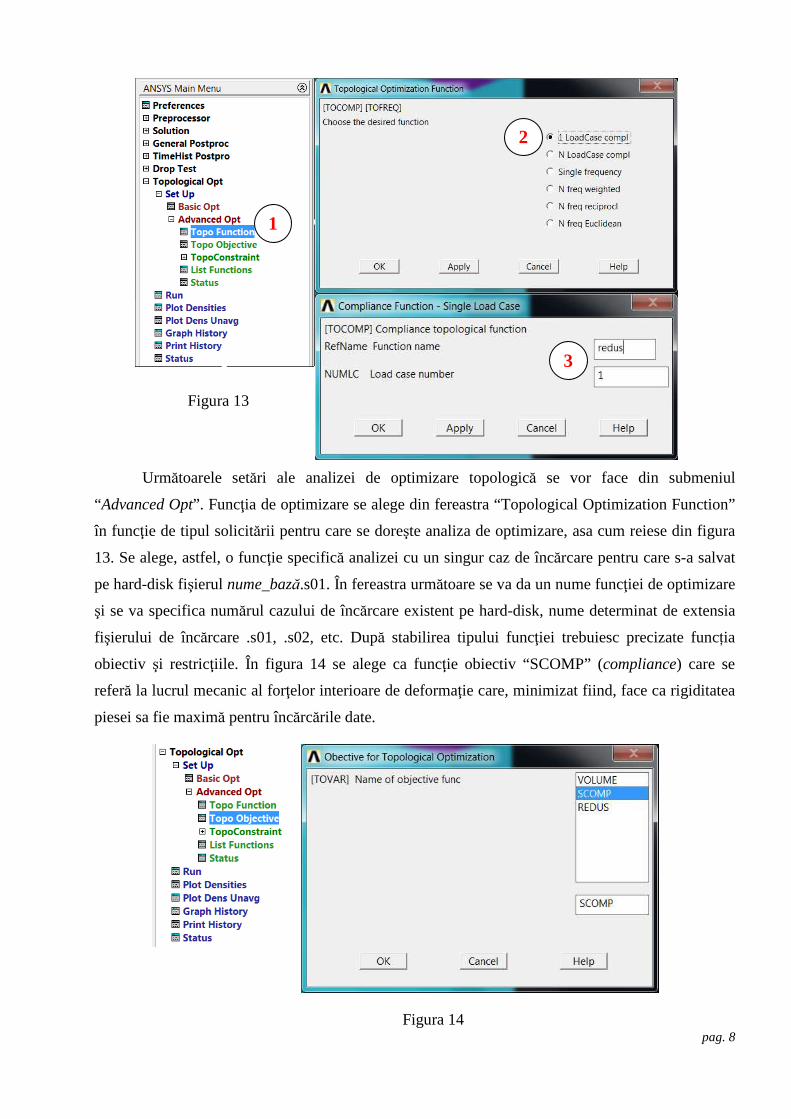
Următoarele setări ale analizei de optimizare topologică se vor face din submeniul
“Advanced Opt”. Funcţia de optimizare se alege din fereastra “Topological Optimization Function”
în funcţie de tipul solicitării pentru care se doreşte analiza de optimizare, asa cum reiese din figura
13. Se alege, astfel, o funcţie specifică analizei cu un singur caz de încărcare pentru care s-a salvat
pe hard-disk fişierul nume_bază.s01. În fereastra următoare se va da un nume funcţiei de optimizare
şi se va specifica numărul cazului de încărcare existent pe hard-disk, nume determinat de extensia
fişierului de încărcare .s01, .s02, etc. După stabilirea tipului funcţiei trebuiesc precizate funcția
obiectiv şi restricţiile. În figura 14 se alege ca funcţie obiectiv “SCOMP” (compliance) care se
referă la lucrul mecanic al forţelor interioare de deformaţie care, minimizat fiind, face ca rigiditatea
piesei sa fie maximă pentru încărcările date.
Figura 13
1
2
3
Figura 14
pag. 9
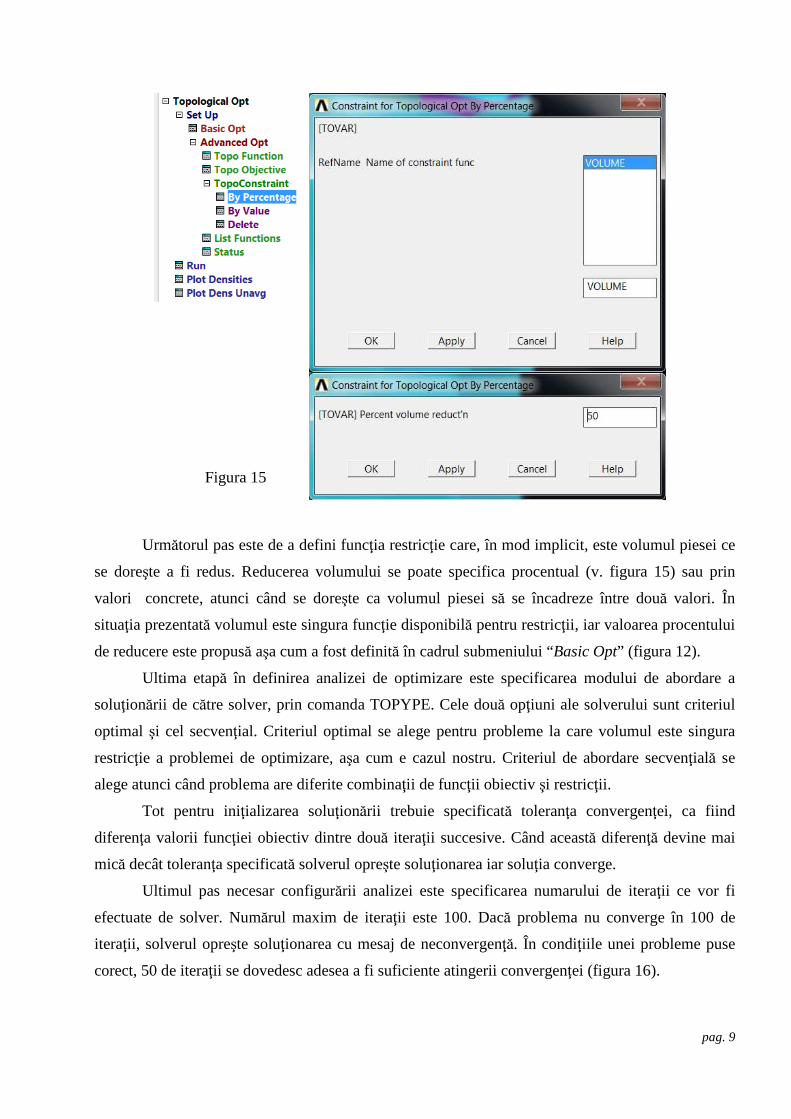
Următorul pas este de a defini funcţia restricţie care, în mod implicit, este volumul piesei ce
se doreşte a fi redus. Reducerea volumului se poate specifica procentual (v. figura 15) sau prin
valori concrete, atunci când se doreşte ca volumul piesei să se încadreze între două valori. În
situaţia prezentată volumul este singura funcţie disponibilă pentru restricţii, iar valoarea procentului
de reducere este propusă aşa cum a fost definită în cadrul submeniului “Basic Opt” (figura 12).
Ultima etapă în definirea analizei de optimizare este specificarea modului de abordare a
soluţionării de către solver, prin comanda TOPYPE. Cele două opţiuni ale solverului sunt criteriul
optimal şi cel secvenţial. Criteriul optimal se alege pentru probleme la care volumul este singura
restricţie a problemei de optimizare, aşa cum e cazul nostru. Criteriul de abordare secvenţială se
alege atunci când problema are diferite combinaţii de funcţii obiectiv şi restricţii.
Tot pentru iniţializarea soluţionării trebuie specificată toleranţa convergenţei, ca fiind
diferenţa valorii funcţiei obiectiv dintre două iteraţii succesive. Când această diferenţă devine mai
mică decât toleranţa specificată solverul opreşte soluţionarea iar soluţia converge.
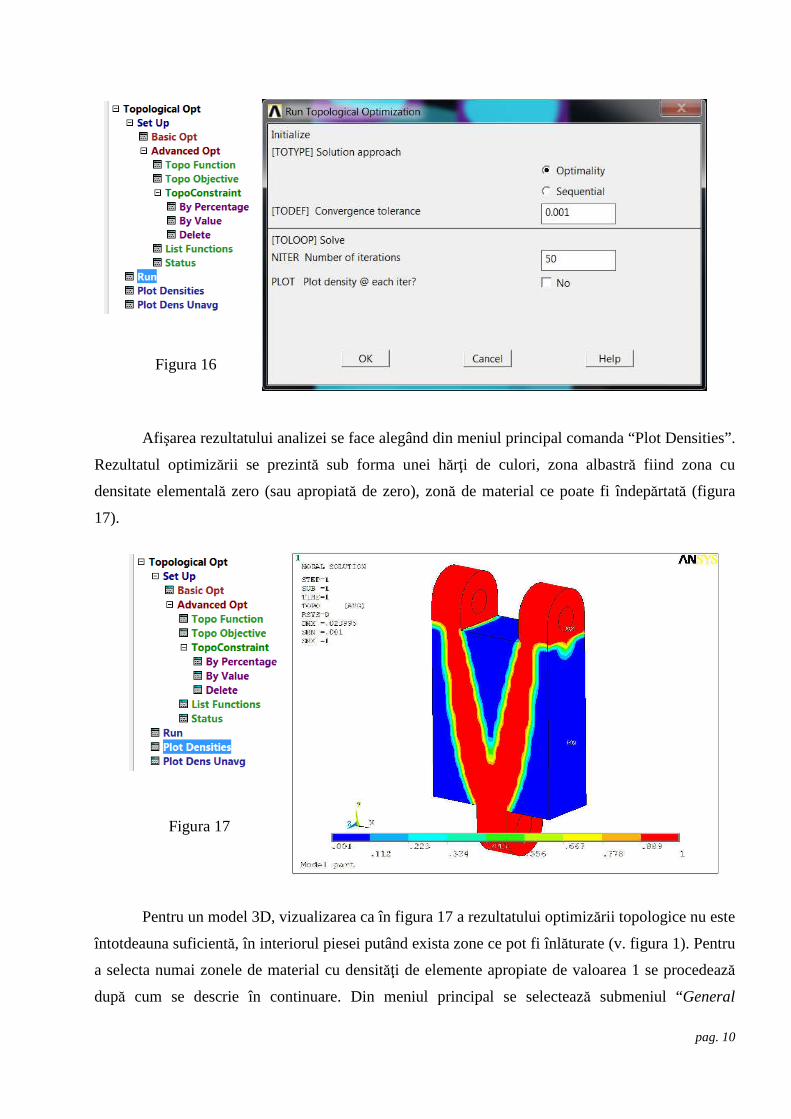
Ultimul pas necesar configurării analizei este specificarea numarului de iteraţii ce vor fi
efectuate de solver. Numărul maxim de iteraţii este 100. Dacă problema nu converge în 100 de
iteraţii, solverul opreşte soluţionarea cu mesaj de neconvergenţă. În condiţiile unei probleme puse
corect, 50 de iteraţii se dovedesc adesea a fi suficiente atingerii convergenţei (figura 16).
Figura 15
pag. 10
Afi şarea rezultatului analizei se face alegând din meniul principal comanda “Plot Densities”.
Rezultatul optimizării se prezintă sub forma unei hărţi de culori, zona albastră fiind zona cu
densitate elementală zero (sau apropiată de zero), zonă de material ce poate fi îndepărtată (figura
17).
Pentru un model 3D, vizualizarea ca în figura 17 a rezultatului optimizării topologice nu este
întotdeauna suficientă, în interiorul piesei putând exista zone ce pot fi înlăturate (v. figura 1). Pentru
a selecta numai zonele de material cu densităţi de elemente apropiate de valoarea 1 se procedează
după cum se descrie în continuare. Din meniul principal se selectează submeniul “General
Figura 16
Figura 17
pag. 11
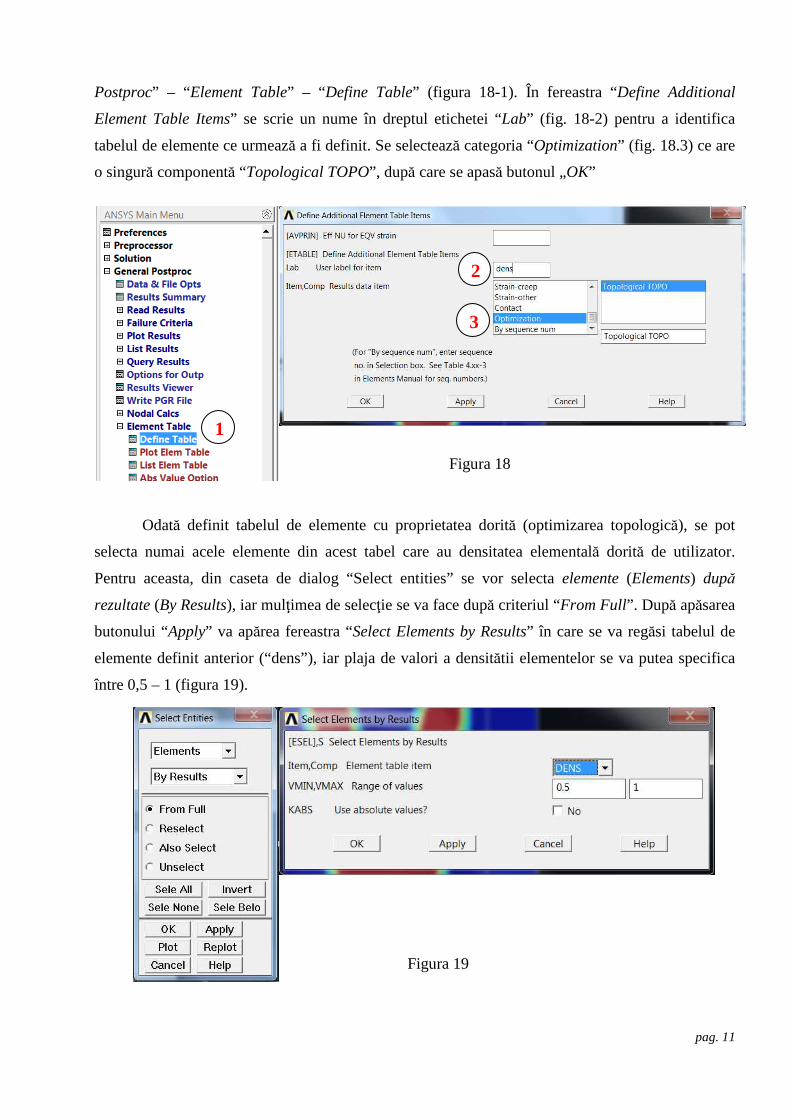
Postproc” – “Element Table” – “Define Table” (figura 18-1). În fereastra “Define Additional
Element Table Items” se scrie un nume în dreptul etichetei “Lab” (fig. 18-2) pentru a identifica
tabelul de elemente ce urmează a fi definit. Se selectează categoria “Optimization” (fig. 18.3) ce are
o singură componentă “Topological TOPO”, după care se apasă butonul „OK”
Odată definit tabelul de elemente cu proprietatea dorită (optimizarea topologică), se pot
selecta numai acele elemente din acest tabel care au densitatea elementală dorită de utilizator.
Pentru aceasta, din caseta de dialog “Select entities” se vor selecta elemente (Elements) după
rezultate (By Results), iar mulţimea de selecţie se va face după criteriul “From Full”. După apăsarea
butonului “Apply” va apărea fereastra “Select Elements by Results” în care se va regăsi tabelul de
elemente definit anterior (“dens”), iar plaja de valori a densitătii elementelor se va putea specifica
între 0,5 – 1 (figura 19).
1
2
3
Figura 18
Figura 19
pag. 12
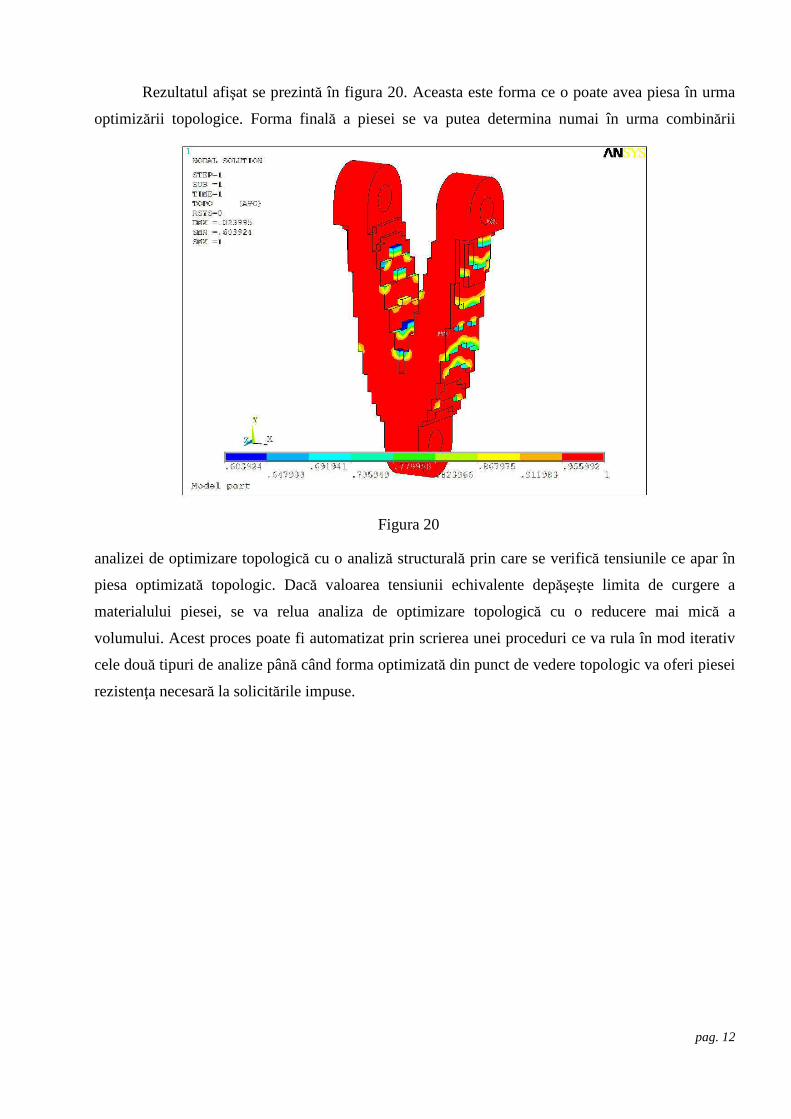
Rezultatul afişat se prezintă în figura 20. Aceasta este forma ce o poate avea piesa în urma
optimizării topologice. Forma finală a piesei se va putea determina numai în urma combinării
analizei de optimizare topologică cu o analiză structurală prin care se verifică tensiunile ce apar în
piesa optimizată topologic. Dacă valoarea tensiunii echivalente depăşeşte limita de curgere a
materialului piesei, se va relua analiza de optimizare topologică cu o reducere mai mică a
volumului. Acest proces poate fi automatizat prin scrierea unei proceduri ce va rula în mod iterativ
cele două tipuri de analize până când forma optimizată din punct de vedere topologic va oferi piesei
rezistenţa necesară la solicitările impuse.
Figura 20