NC. CINEMATICĂ - deliu.ro · PDF fileMECANICĂ*N* NC. CINEMATICĂ ‐ 4 ‐ Introducere...
143
MECANICĂ*N* NC. CINEMATICĂ ‐ 1 ‐ NC. CINEMATICĂ
Transcript of NC. CINEMATICĂ - deliu.ro · PDF fileMECANICĂ*N* NC. CINEMATICĂ ‐ 4 ‐ Introducere...

MECANICĂ*N* NC. CINEMATICĂ
‐ 1 ‐
NC.
CINEMATICĂ

MECANICĂ*N* NC. CINEMATICĂ
‐ 2 ‐
CUPRINS
Introducere...................................................................................................................................................... 3 Capitolul NC.01. Cinematica mișcării absolute a punctului material ........................................................... 5
NC.01.1. Traiectoria, viteza și accelerația punctului ........................................................................ 5NC.01.2. Studiul mișcării punctului folosind diferite sisteme de coordonate ................................... 9NC.01.3. Aplicație ............................................................................................................................. 27
Capitolul NC.02. Mișcări particulare ale punctului material ......................................................................... 30
NC.02.1. Mişcarea rectilinie a punctului material ............................................................................ 30NC.02.2. Mişcarea circulară a punctului material ............................................................................. 33NC.02.3. Mişcarea punctului material pe elicea cilindrică de pas constant ...................................... 37NC.02.4. Aplicație ............................................................................................................................. 38
Capitolul NC.03. Elemente privind mișcarea generală a rigidului ................................................................ 42 NC.03.1. Considerații generale ......................................................................................................... 42 NC.03.2. Matricea de schimbare de bază .......................................................................................... 44 NC.03.3. Unghiurile lui Euler ........................................................................................................... 47 NC.03.4. Viteza şi acceleraţia unghiulară a solidului rigid ............................................................... 48 NC.03.5. Distribuţia de viteze şi acceleraţii pentru solidul rigid ...................................................... 50 NC.03.6. Proprietăţi ale câmpului de viteze ...................................................................................... 52 NC.03.7. Proprietăţi ale câmpului de acceleraţii la solidul rigid ...................................................... 58 NC.03.8. Aplicaţie ............................................................................................................................. 59 Capitolul NC.04. Mişcări particulare ale rigidului ........................................................................................ 61 NC.04.1. Mișcarea de translaţie ........................................................................................................ 61 NC.04.2. Mișcarea rigidului cu axă fixă ........................................................................................... 61 NC.04.3. Mișcarea elicoidală ............................................................................................................ 64 NC.04.4. Mişcarea plan-paralelă ...................................................................................................... 68 NC.04.5. Aplicaţii ............................................................................................................................. 77 NC.04.6. Mișcarea rigidului cu punct fix ......................................................................................... 81 NC.04.7. Mișcarea generală a unui rigid ........................................................................................... 85 Capitolul NC.05 Studiul cinematic al mişcării relative a punctului material ................................................ 87 NC. 05.1. Studiul geometric şi cinematic .......................................................................................... 87 NC. 05.2. Definirea vectorului viteză şi acceleraţie unghiulară ........................................................ 89 NC. 05.3. Derivata matricei de rotaţie în raport cu timpul ................................................................ 92 NC. 05.4. Legea de compunere a vitezelor în mişcarea relativă ....................................................... 96 NC. 05.5. Legea de compunere a acceleraţiilor în mişcarea relativă ................................................ 97 NC. 05.6. Aplicație ............................................................................................................................ 99 Capitolul NC.06. Mişcarea relativă a sistemelor de corpuri .......................................................................... 102 NC. 06.1. Studiul geometric sub formă matriceală a sistemelor de corpuri ..................................... 102 NC. 06.2. Legea de compunere a vitezelor şi acceleraţiilor unghiulare ............................................ 107 NC. 06.3. Legea de compunere a vitezelor şi acceleraţiilor liniare .................................................. 109 NC. 06.4. Parametrii mişcării absolute a unui punct P...................................................................... 111 Capitolul NC.07. Autoevaluare ..................................................................................................................... 114 Capitol NC.01. Cinematica mișcării absolute a punctului material ................................................. 114 Exerciţii şi probleme rezolvate ...................................................................................................... 114 Exerciţii şi probleme propuse spre rezolvare ................................................................................. 115 Capitol NC.02. Mișcări particulare ale punctului material ............................................................. 118 Exerciţii şi probleme rezolvate ...................................................................................................... 118

MECANICĂ*N* NC. CINEMATICĂ
‐ 3 ‐
Exerciţii şi probleme propuse spre rezolvare ................................................................................. 119 Capitol NC.04. Mişcări particulare ale rigidului ............................................................................. 120 Exerciţii şi probleme rezolvate ...................................................................................................... 120 Exerciţii şi probleme propuse spre rezolvare ................................................................................. 130 Întrebări/ chestiuni recapitulative ................................................................................................... 133 Capitol NC.05. Studiul cinematic al mişcării relative a punctului material ..................................... 134 Exerciţii şi probleme rezolvate ...................................................................................................... 134 Exerciţii şi probleme propuse spre rezolvare ................................................................................. 137 Întrebări/ chestiuni recapitulative ................................................................................................... 139 Bibliografie ...................................................................................................................................... 140

MECANICĂ*N* NC. CINEMATICĂ
‐ 4 ‐
Introducere
CINEMATICA este partea mecanicii care se ocupa cu studiul miscarii punctului material, rigidului, sistemelor de puncte materiale si sistemelor de corpuri, fara a considera sistemele de forte care determina miscarea (studiul geometric al miscarii).
Se studiaza miscarea absoluta a punctului material si miscarile particulare ale acestuia, miscarea generala a rigidului si miscarile particulare ale rigidului. Studiul continua cu miscarea relativa a punctului material si miscarea relativa a sistemelor de corpuri.
Partea de teorie este urmata de probleme rezolvate si probleme cu raspuns, utile in formarea deprinderilor de a rezolva probleme si in autoevaluarea studentului.

MECANICĂ*N* NC.01.Cinematica mișcării absolute a punctului material
- 5 -
Capitolul NC.01. Cinematica mișcării absolute a punctului material
Cuvinte-cheie Ecuaţia sau legea de mişcare, Traiectoria, Viteză, Hodograful vitezei, Accelerația,
Mișcarea uniformă, Mișcarea rectilinie, Mișcarea rectilinie și uniformă, Coordonate carteziene, Ecuaţiile parametrice ale traiectoriei, Coordonate polare, Rază polară, Unghi polar,
Viteza areolară, Coordonate cilindrice, Triedrul Serret-Frenet, Ecuația orară a mișcării, Accelerația normală, Accelerația tangențială, Raza de curbură a traiectoriei, Coordonate sferice
NC.01.1. Traiectoria, viteza și accelerația punctului
Fie un reper fix ( )kjiOR ,,, și M un punct mobil. Mișcarea punctului M în intervalul de timp
[ ]10 , tt este cunoscută dacă se poate determina poziția punctului față de reperul ( )kjiOR ,,, , în orice
moment [ ]10 , ttt ∈ .
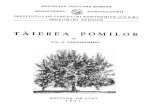
Poziţia punctului M la momentul t este determinată prin vectorul de poziţie OMr = , care depinde de timp (fig.1.1.):
( )trr = , [ ]10,ttt∈ . (1.1)
Relaţia (1.1) se numeşte ecuaţia sau legea de mişcare a punctului M, deoarece permite aflarea poziţiei punctului M în orice moment din intervalul [ ]10 , tt în care are loc mişcarea.
Funcţia vectorială ( )tr trebuie să fie uniformă (univocă) adică unei valori a timpului îi corespunde o unică valoare a funcției ( )tr , ceea ce înseamnă că punctul are poziție bine precizată în fiecare
moment. De asemenea, funcția ( )tr trebuie să fie finită în modul şi cel puţin de două ori derivabilă în raport cu timpul, deci ( )tr este funcție continuă și are derivata întâi continuă. Aceste restricţii
sunt impuse de fenomenul fizic pe care îl modelează.
Fenomenele în care derivata întâi a funcţiei ( )tr are o discontinuitate pentru o anumită valoarea a
lui t, cum sunt ciocnirile, vor fi studiate separat.
y
x
O
M ( )tr
Fig.1.1. Poziţia punctului M la momentul t
z

MECANICĂ*N* NC.01.Cinematica mișcării absolute a punctului material
- 6 -
Vom nota cu acelaşi simbol atât punctul mobil, cât şi punctul din spaţiu prin care trece el la un moment dat t.
Traiectoria punctului M este locul geometric al poziţiilor sale succesive în spaţiu, ceea ce este totuna cu locul geometric al extremităţii vectorului de poziţie )(tr , când t variază în intervalul de mişcare. În general, traiectoria este o curbă oarecare în spaţiu, regulată pe porţiuni şi rectificabilă adică curba are o lungime calculabilă, finită.
De multe ori forma traiectoriei atrage denumirea mişcării. De exemplu, dacă traiectoria este o dreaptă, mişcarea se numeşte rectilinie sau, dacă traiectoria este un cerc, mişcarea se numeşte circulară.
Pe o traiectorie dată, mişcarea punctului poate avea loc în diverse moduri. Pentru a caracteriza complet mişcarea unui punct se definesc noţiunile de viteză instantanee şi de acceleraţie instantanee.
Observaţie:
În mecanică, derivata în raport cu timpul se notează printr-un punct situat deasupra simbolului mărimii de derivat. Notarea diferită a derivatei în raport cu timpul, faţă de derivata obişnuită în raport cu o altă variabilă răspunde necesităţii, constatate în mecanică, de a distinge grafic cele două categorii de derivate.
Se numeşte viteză a punctului M la momentul t sau viteză instantanee, mărimea vectorială dată de derivata în raport cu timpul a vectorului de poziţie
rdtrdv
def== [m/s], [ ]10 , ttt ∈ . (1.2)
Viteza este un vector legat de punctul M. Se va arăta că acest vector este tangent la traiectorie şi că este orientat în sensul mişcării.
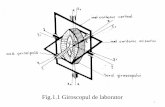
Fig.1.2. Reprezentarea vectorului viteză medie mv
Se consideră vectorul
( ) ( )tt
MMtt
trtrvm −=
−−
='
''
' , (1.3)
z
y
x
( )'tr
( )tr M
M ′
mv
O

MECANICĂ*N* NC.01.Cinematica mișcării absolute a punctului material
- 7 -
care se numește viteză medie a punctului în intervalul de timp [ ]', tt . Acest vector are ca suport coarda MM' şi sensul de la M la M', adică sensul mişcării (fig.1.2.).
Viteza medie depinde de momentele t şi t'. Pentru a obţine o informaţie cât mai precisă, trebuie micşorat intervalul de timp între momentele t şi t'. Acest lucru se realizează printr-un proces de trecere la limită, care are ca rezultat obţinerea vitezei instantanee a punctului M la momentul t
( ) rdtrd
tttrtrv
tt==
−−
=→′ '
)'(lim . (1.4)
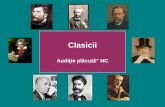
Din cele de mai sus rezultă că viteza este un vector tangent la traiectorie în punctul M şi orientat în
sensul mişcării (fig.1.3.). Considerăm acum un punct fix Ω în care construim vectorul PΩ echipolent cu vectorul ( )tv , adică vectorul PΩ este egal în mărime, paralel și de același sens cu
vectorul ( )tv . Când t variază în intervalul de mişcare [ ]10 , tt , extremitatea P a vectorului PΩ construit pentru valorile lui t din acest interval, va descrie o curbă numită hodograful vitezei (fig.1.4.). În aceeaşi idee, traiectoria poate fi interpretată ca fiind hodograful vectorului de poziţie, iar viteza este tangentă la acest hodograf.
Se consideră acum, pe hodograful vitezei, două momente t şi t' (fig.1.4.), între care variaţia vitezei punctului este
Ω
P′
P
( )'tv
( )tv
v∆
Fig.1.4. Hodograful vitezei
ma
z
x
y O
( )tr
M
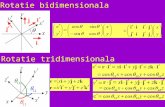
v a
Fig.1.3 Reprezentarea vectorului viteză v și a vectorului accelerație a

MECANICĂ*N* NC.01.Cinematica mișcării absolute a punctului material
- 8 -
( ) ( ) '' PPtvtvv =−=∆ . (1.5)
Se poate defini acum mărimea vectorială acceleraţie medie, ca fiind raportul dintre variaţia vitezei într-un interval de timp şi acel interval:
( ) ( )tt
vtt
tvtvam −∆
=−−
=''
' . (1.6)
Printr-un proces de trecere la limită, se obține accelerația momentană:
( ) ( ) vdtvd
tttvtva
tt==
−−
=→ '
'lim'
. (1.7)
Se numeşte acceleraţie a punctului M la momentul t, sau acceleraţie instantanee, mărimea vectorială dată de derivata în raport cu timpul a vectorului viteză:
vdtvda
def== [m/s2]. (1.8)
Vectorul acceleraţie instantanee a caracterizează variaţia vectorului viteză şi este un vector tangent la hodograful vitezei. În mod analog cu introducerea hodografului vitezei, se poate introduce hodograful acceleraţiei. De asemenea, se pot defini acceleraţii de ordin superior, după cum se va vedea în paragraful următor.
Se va arăta că vectorul acceleraţie este conţinut în planul osculator al traiectoriei relativ la punctul M.
În cazul unei mişcări oarecare pe o curbă oarecare, vectorul viteză are o mărime variabilă şi o orientare variabilă, deoarece el este tangent la traiectorie în fiecare moment al mişcării. Se pot distinge însă trei cazuri particulare importante:
a. - vectorul viteză are modulul constant în intervalul de timp [ ]10 , tt al mişcării punctului pe
traiectorie
constant0 == vv , [ ]10 , ttt ∈ . (1.9)
În această situaţie, numai orientarea vectorului viteză se modifică în timp, iar mişcarea punctului în intervalul considerat se spune că este uniformă, indiferent de forma traiectoriei.
Deoarece
constant20
22 === vvv , (1.10)
rezultă, prin derivare, că:
022 =⋅=⋅ avvv , (1.11)
adică
0=⋅ av , (1.12)
ceea ce arată că, în acest caz particular al mișcării uniforme pe o curbă oarecare, vectorii viteză și accelerație sunt perpendiculari. Vectorul a este nenul deoarece derivata unui vector de modul

MECANICĂ*N* NC.01.Cinematica mișcării absolute a punctului material
- 9 -
constant dar de orientare variabilă este nenulă;
b. - vectorul viteză are numai orientarea constantă în intervalul de timp [ ]10 , tt al mișcării punctului
pe traiectorie. Acest lucru înseamnă că tangenta la traiectorie nu-şi modifică orientarea, deci traiectoria este o dreaptă, adică mişcarea este rectilinie, dar cu mărimea vitezei variabilă;
c. - vectorul viteză este constant în intervalul de timp [ ]10 , tt al mișcării punctului pe traiectorie,
adică
constant0 == vv . (1.13)
Acest lucru înseamnă că rămân constante atât orientarea cât şi modulul vectorului, mişcarea punctului fiind rectilinie şi uniformă.
În acest caz, vectorul acceleraţie este nul
00 === vva . (1.14)
Pe de altă parte, plecând de la faptul că vectorul acceleraţie este nul, rezultă, prin integrare, că vectorul viteză este constant, adică faptul că mişcarea este rectilinie şi uniformă. Se poate concluziona că singura mişcare în care vectorul acceleraţie este nul este mişcarea rectilinie şi uniformă.
Accelerații de ordin superior
Vectorul accelerație a unui punct se obține prin derivarea vectorului viteză. Vectorul accelerație nu este neapărat constant, motiv pentru care, în anumite situații, poate să intereseze viteza de schimbare în timp a vectorului accelerație. Acest fenomen fizic este surprins de derivata vectorului accelerație, adică de vectorul avr == . Acest vector se numește accelerație de ordinul al doilea, ceea ce face ca vectorul accelerație a să fie denumit accelerație de ordinul întâi. Procesul de derivare poate fi continuat și se obține astfel accelerația de ordinul al treilea, al patrulea ș.a.m.d.
Ecuația fundamentală a dinamicii clasice amF = nu include decât accelerația de ordinul întâi, dar modelarea unor fenomene fizice care implică variații foarte rapide în timp ale forței poate fi făcută numai dacă sunt luate în considerație accelerațiile de ordin superior, începând cu cele de ordinul al doilea.
NC.01.2. Studiul mișcării punctului folosind diferite sisteme de coordonate
Prin studiul mişcării unui punct cu lege de mişcare dată, se înţelege determinarea traiectoriei, vitezei
şi acceleraţiei sale în orice moment al intervalului de timp [ ]10 , tt , în care se studiază mișcarea.
Pentru studiul mişcării unui punct se pot folosi, în funcţie de situaţie, diferite sisteme de coordonate.
Studiul mişcării punctului în coordonate carteziene
Fie ( )kjiOR ,,, un reper cartezian drept, cu originea în punctul O, şi prevăzut cu o bază
ortonormată ( )kji ,, . În raport cu acest reper considerat fix, poziţia unui punct mobil M este dată de
coordonatele sale x, y şi z, care sunt funcţii de timp:

MECANICĂ*N* NC.01.Cinematica mișcării absolute a punctului material
- 10 -
( )txx = , ( )tyy = , ( ),tzz = [ ]10 , ttt ∈ . (1.15)
Legea de mişcare (1.1) este echivalentă cu relaţiile (1.15), fapt pentru care ele definesc legea de mişcare a punctului M în coordonate carteziene. În acelaşi timp, relaţiile (1.15) constituie şi ecuaţiile parametrice ale traiectoriei, parametrul fiind timpul t.
Ecuaţiile analitice ale traiectoriei se obţin din ecuațiile (1.15), prin eliminarea variabilei independente t.
Traiectoria se mai poate trasa aproximativ prin puncte, dând valori parametrului t în intervalul de mişcare.
Vectorul de poziţie al punctului M este:
kzjyixr ++= (1.16)
unde kji ,, sunt versori constanți (fig.1.5.), iar x, y și z sunt coordonatele punctului M, variabile în
timp, conform cu relația (1.15).
Viteza punctului M este:
kzjyixrv ++== (1.17)
cu componentele:
xvx = , yvy = , zvz = , (1.18)
şi cu modulul:
222zyx vvvv ++= . (1.19)
Acceleraţia punctului M este:
kzjyixrva ++=== , (1.20)
cu componentele:
z
x
y
z
x
y k
i j O
M(x,y,z)
Fig.1.5. Coordonatele carteziene ale punctului M
r

MECANICĂ*N* NC.01.Cinematica mișcării absolute a punctului material
- 11 -
xva xx == , yva yy == , zva zz == , (1.21)
şi cu modulul:
222zyx aaaa ++= . (1.22)
Cu ajutorul expresiilor analitice se pot deduce şi cosinusurile directoare ale vectorilor viteză şi acceleraţie.
Un caz particular important este cel al mişcărilor plane. De regulă, planul mişcării este considerat planul xOy. În această situaţie, coordonata z este nulă şi implicit derivatele ei. Prin urmare, legea de mişcare este
( )txx = , ( )tyy = , 0=z , [ ]10 , ttt ∈ , (1.23)
care sunt şi ecuaţiile parametrice ale traiectoriei. Eliminând parametrul t, se obţine ecuaţia analitică a traiectoriei, sub formă implicită:
( ) 0, =yxg , (1.24)
sau sub formă explicită:
( )xfy = . (1.25)
Vectorii viteză şi acceleraţie devin:
jyixrv +== , (1.26)
jyixrva +=== (1.27)
şi sunt situați în planul mişcării (fig.1.6.).
Fig.1.6. Componentele vectorilor viteză şi acceleraţie în coordonate carteziene
în cazul mișcării plane.
Studiul mişcării punctului în coordonate polare
Se consideră un punct mobil M, a cărui mişcare este plană. Fie Ox o semidreaptă fixă situată în
planul mişcării, numită semiaxă polară, şi fie i versorul acestei axe. Distanţa de la polul O la
y
O j
i x
a
ixax =
0M jyay =
( )yxM , ixvx =
v jyvy =
r

MECANICĂ*N* NC.01.Cinematica mișcării absolute a punctului material
- 12 -
punctul M se numeşte rază polară şi este notată cu r , cu precizarea că vectorul de poziție rOM = îndeplinește condiția:
0>= rOM , (1.28)
iar unghiul orientat dintre axa Ox şi vectorul OM este notat cu θ şi este numit unghi polar (fig.1.7.). Numerele r şi θ sunt numite coordonatele polare ale punctului M. În coordonate polare, reperul are originea în punctul M, deci este mobil, iar cele două axe ale sale sunt axa radială, coliniară cu raza polară, şi axa transversală, perpendiculară pe prima. Versorul axei radiale este notat ρi şi este orientat în sensul creşterii razei polare, iar versorul axei transversale este notat ni şi
se obţine din ρi prin rotirea acestuia cu unghiul 2π
+ (fig.1.7.).
Când punctul M se mişcă, coordonatele sale polare se modifică în timp
( )trr = , ( )tθθ = , [ ]10 , ttt ∈ . (1.29)
Relaţiile (1.29) reprezintă legea de mişcare a punctului M în coordonate polare şi, în acelaşi timp, ecuaţia parametrică a traiectoriei în coordonate polare.
Ecuaţia analitică a traiectoriei se determină eliminând parametrul t între relaţiile (1.29), obţinându-se forma implicită sau, atunci când este posibil, forma explicită a acesteia
( ) 0, =θrf sau ( )θrr = . (1.30)
Știind că vectorul de poziţie al punctului M este
ρirOM = , (1.31)
se poate determina expresia vitezei şi a acceleraţiei în coordonate polare. Deoarece în timpul
mişcării versorii ρi şi ni îşi schimbă orientarea, deci nu sunt constanţi aşa cum erau kji ,, în
j
O i
( )tθ
( )tr ni
2π
+ nn irv θ=
M(r,θ)
axa transversală
ρi
v
ρρ irv =
axa radială
Fig.1.7. Reperul polar și componentele vitezei
x
y

MECANICĂ*N* NC.01.Cinematica mișcării absolute a punctului material
- 13 -
coordonate carteziene, va trebui să determinăm derivatele lor în raport cu timpul. Mai întâi, din fig.1.7., se deduce că:
,cossin
,sincos
jii
jii
n θθ
θθρ
+−=
+= (1.32)
în care i şi j sunt versori constanţi. Derivăm apoi relaţiile (1.32) în raport cu timpul şi obţinem:
( )( ) .sincossincos
,cossincossin
ρ
ρ
θθθθθθθθ
θθθθθθθθ
ijijii
ijijii
n
n
⋅−=+−=−−=
⋅=+−=+−=
(1.33)
Plecând de la definiţia vitezei dată de relaţia (1.2), rezultă:
niriririrv θρρρ +=+== , (1.34)
care reprezintă expresia analitică a vitezei în coordonate polare, deci în baza ( )nii ,ρ . Proiecțiile pe
axe și modulul ei sunt:
rv =ρ , θrvn = , 222 θ rrv += . (1.35)
Derivând expresia analitică a vitezei în raport cu timpul, se obţine expresia analitică a acceleraţiei în coordonate polare:
ρρθρρ θθθθθθθ iriririririririririra nnnnn2 −+++=++++= , (1.36)
de unde rezultă:
( ) ( ) nirrirra θθθ ρ ++−= 22 . (1.37)
Componentele vectorului şi modulul acestuia sunt:
2θρ rra −= , θθ rran += 2 , 22naaa += ρ . (1.38)
În studiul mişcării punctului se foloseşte, uneori, viteza areolară. Pentru a o determina, considerăm
un interval de timp ttt −=∆ ' , în care unghiul polar θ a variat cu ( ) ( )tt θθθ −=∆ ' , iar raza polară a
variat cu o cantitate r∆ şi a măturat o arie A∆ , haşurată în fig.1.8. Aria A∆ este cuprinsă între ariile a două sectoare circulare.
Presupunând că r a crescut cu cantitatea 0≥∆r , se poate scrie:
( )22
22 θθ ∆∆+≤∆≤
∆ rrAr . (1.39)
Împărţind relaţia de mai sus la t∆ şi trecând la limită, se obţine:
2
lim2
2
0
2 θθ rtAr
t≤
∆∆
≤→∆
, (1.40)
în care produsele de termeni infinit mici s-au neglijat.

MECANICĂ*N* NC.01.Cinematica mișcării absolute a punctului material
- 14 -
Mărimea
2
lim2
0
θrdtdA
tA
t==
∆∆
=Ω→∆
(1.41)
se numeşte viteză areolară şi este dată de aria măturată de raza polară în unitatea de timp. Ea se mai poate calcula cu formula:
22
1 2θrvr =×=Ω , (1.42)
unde vectorul
( )vr ×=Ω21 (1.43)
se numeşte vector viteză areolară. El se defineşte cu relaţia (1.43) şi pentru mişcări care nu sunt
plane.
Se poate demonstra că atunci când Ω are direcţie fixă în spaţiu, traiectoria punctului este o curbă
plană, iar când 0=Ω atunci traiectoria punctului este rectilinie.
Accelerația areolară se obține derivând viteza areolară Ω .
)(21
21)(
21 ar
dtvdrv
dtrd
dtvrd
×=
×+×=
×=Ω (1.44)
Dacă se înlocuiesc în formulele (1.43) și (1.44) expresiile vitezei și accelerației în cordonate carteziene, se pot obține viteza și accelerația areolară în aceste coordonate.
Pe baza figurii 1.7 se poate deduce legătura dintre coordonatele polare ρ și θ ale punctului M și coordonatele sale carteziene x și y:
θρθρ
sincos
==
yx
. (1.45)
Din relațiile (1.45) se deduce legătura dintre coordonatele carteziene x și y și cele polare ρ și θ:
O
M ′
M
rr ∆+
θ∆
Fig.1.8. Aproximarea ariei hașurate ∆A
x r
θ

MECANICĂ*N* NC.01.Cinematica mișcării absolute a punctului material
- 15 -
=
+=
xyyx
arctg
22
θ
ρ. (1.46)
Studiul mişcării punctului în coordonate cilindrice
Se consideră un plan fix (P), o semiaxă fixă Ox de versor i în acest plan şi un versor k perpendicular pe plan în punctul O. Fie M un punct mobil în spaţiu şi M1 proiecţia lui pe planul (P) (fig.1.9.). Deoarece coordonatele polare ale lui M1 sunt ( )θ,r , atunci poziţia lui M în spaţiu este
determinată de tripleta ( )zr ,,θ , unde r , θ și z sunt numite coordonatele cilindrice ale punctului M,
cu 1MMz ±= .
În punctul M se construiesc versorii ρi , ni şi zi , unde ρi şi ni sunt versorii reperului polar translaţi
din M1 în M, iar nz iii ×= ρ completează triedrul drept. Ecuaţiile de mişcare ale punctului M sunt:
( )trr = , ( )tθθ = , ( )tzz = , [ ]10 , ttt ∈ , (1.47)
care sunt şi ecuaţiile parametrice ale traiectoriei.
Eliminând parametrul t, se poate obţine ecuaţia analitică a traiectoriei.
Din figura 1.9. se observă că vectorul de poziție al punctului M este MMOMOM 11 += , adică:
zizirOM += ρ . (1.48)
Derivând acest vector în raport cu timpul şi utilizând relaţiile (1.33), rezultă următoarea expresie analitică a vitezei unui punct în coordonate cilindrice:
zn izirirv ++= θρ , (1.49)
cu componentele:
rv =ρ , θrvn = , zvz = . (1.50)
(P) x
i O k
r
zi
ni
ρi M
z
r
θ 1M ρi
ni
Fig.1.9. Coordonatele cilindrice ale punctului M

MECANICĂ*N* NC.01.Cinematica mișcării absolute a punctului material
- 16 -
Derivând (1.49) în raport cu timpul și folosind relațiile (1.33), rezultă următoarea expresie analitică a acceleraţiei unui punct în coordonate cilindrice:
( ) ( ) zn izirrirra +++−= θθθ ρ 22 , (1.51)
cu componentele:
2θρ rra −= , θθ rran += 2 și zaz = . (1.52)
În cazul particular când 0=z , se obţin coordonatele polare.
Pe baza figurii 1.9. se poate deduce legătura dintre coordonatele cilindrice r, θ și z, ale punctului M și coordonatele sale carteziene x, y și z:
zzryrx
===
θθ
sincos
. (1.53)
Din relațiile (1.53) se deduce imediat legătura dintre coordonatele carteziene x, y și z și cele cilindrice r, θ și z:
zzxyarctg
yxr
=
=
+=
θ
22
. (1.54)
Studiul mişcării punctului folosind triedrul Serret-Frenet
Dacă un punct parcurge o traiectorie cunoscută pe care se alege un punct O1 ca origine a arcelor de curbă s şi un sens de parcurgere, atunci poziţia punctului faţă de O1 poate fi determinată prin coordonata intrinsecă sau coordonata naturală s (fig.1.10.). Mișcarea punctului M este definită în acest caz printr-o singură funcție scalară
( )tss = , [ ]10,ttt∈ , (1.55)
numită ecuația orară a mișcării.
Se ataşează punctului M de pe traiectorie un triedru denumit triedrul lui Frenet ( )βντ ,,,M , cu originea în punct şi cu axele definite astfel (fig.1.10.):
tangenta la curbă în punctul M, al cărei versor τ este orientat în sensul creşterii lui s și este dat de relația:
ds
rd=τ , (1.56)
unde r este vectorul de poziţie al punctului A;
normala principală, adică normala la curbă în planul osculator, având versorul ν orientat spre centrul de curbură;

MECANICĂ*N* NC.01.Cinematica mișcării absolute a punctului material
- 17 -
binormala, perpendiculară în M pe planul osculator, având versorul β , ales astfel încât ντ , şi
β , în această ordine, să formeze un triedru drept ( )ντβ ×= .
Triedrul definit mai sus este mobil şi se numeşte triedrul Serret-Frenet.
Când vectorul de poziţie r se exprimă în funcţie de arcul s, se obţine ecuaţia intrinsecă a curbei:
( )srr = . (1.57)
Expresia analitică a vitezei se obţine prin derivarea relaţiei (1.57) în raport cu timpul, rezultând:
( )ds
rdsdtds
dsrd
dtsrdrv =⋅=== . (1.58)
Folosind relaţia:
τ=ds
rd , (1.59)
se obține:
ττ vsv ~== cu vv ±=~ , (1.60)
v~ fiind mărimea algebrică a vitezei, adică notația include semnul şi modulul vectorului.
Viteza este tangentă la traiectorie în punctul M, este orientată în sensul mişcării şi are mărimea algebrică sv =~ . Dacă într-un interval de timp 0~ >= sv , atunci s creşte iar vectorii v şi τ au acelaşi sens iar dacă, într-un interval de timp 0~ <= sv , atunci s scade iar vectorii v şi τ au sensuri opuse, rezultând deci că v indică sensul de mişcare.
Proiecţiile vitezei pe axele triedrului Serret-Frenet sunt:
sv =τ , 0=νv , 0=βv , (1.61)
iar modulul este:
sv = . (1.62)
O O1
( )tss =
M
τ β ν
r
Fig.1.10. Triedrul Serret-Frenet

MECANICĂ*N* NC.01.Cinematica mișcării absolute a punctului material
- 18 -
Acceleraţia se obţine prin derivarea vitezei în raport cu timpul:
ττ ssva +== , (1.63)
în care:
νρ
τττ 1sdtds
dsd
dtd
=⋅== , (1.64)
unde s-a utilizat prima formulă a lui Frenet:
νρ
τ 1=
dsd , (1.65)
ρ fiind raza de curbură a traiectoriei în punctul M.
Vectorul acceleraţie se mai scrie acum sub forma:
νρ
τνρ
τ2.2
~ vvssa +=+=
. (1.66)
Relaţia (1.66) arată că, în orice moment, acceleraţia este conţinută în planul osculator.
Proiecţiile acceleraţiei pe axele triedrului Serret-Frenet sunt:
.~vsa == τ ,
ρρν22 vsa ==
, 0=βa , (1.67)
iar modulul este:
22ντ aaa += . (1.68)
Componenta normală a acceleraţiei sau acceleraţia normală
vvsaρ
νρν
22==
(1.69)
este dirijată după normala principală la traiectorie în punctul considerat, având totdeauna sensul
spre concavitatea curbei, deoarece mărimea algebrică a componentei ρν2
~ va = este strict pozitivă,
cu excepţia mişcării rectilinii, când 01=
ρ şi deci această componentă se anulează. Rezultă că νa şi
ν au mereu acelaşi sens.
Componenta tangenţială a acceleraţiei sau acceleraţia tangenţială
τττ.~vsa == (1.70)
este coliniară cu viteza, dar vectorii τa şi τ pot avea acelaşi sens, sensuri opuse sau este posibil ca
τa să fie nul.

MECANICĂ*N* NC.01.Cinematica mișcării absolute a punctului material
- 19 -
Deoarece:
( )
=
=⋅=⋅=+=⋅
22
~~~22. v
dtdv
dtdvvavaavav τντ , (1.71)
rezultă că sunt posibile următoarele trei situaţii:
a) 0>⋅=⋅ τavav , caz în care v şi τa au acelaşi sens, unghiul dintre vectorii v şi a este ascuţit,
iar modulul vitezei creşte deoarece, conform relației (1.71), 02
2>
vdtd
, ceea ce arată că mişcarea
este accelerată (fig.1.11.);
b) 0<⋅=⋅ τavav , caz în care v şi τa au sensuri opuse, unghiul dintre vectorii v şi a este obtuz,
iar modulul vitezei scade deoarece, conform relației (1.71), 02
2<
vdtd , ceea ce arată că mișcarea
este încetinită (fig.1.12.);
v
v
τ τ
M M
τa
τa
ν ν νa
νa
a
a
1O 1O
Fig.1.12. Vectorii v şi a în mişcarea încetinită
v
v
τa
τa τ
τ
M
M
s
s
1O
1O
a a
ν
ν
νa
νa
Fig.1.11. Vectorii v şi a în mişcarea accelerată

MECANICĂ*N* NC.01.Cinematica mișcării absolute a punctului material
- 20 -
c) 0=⋅=⋅ τavav , caz în care rezultă că v este constant deoarece 02
2=
vdtd
, ceea ce arată că
mișcarea este uniformă (fig.1.13.). Vectorul accelerație are o singură componentă nenulă în mișcarea uniformă pe o curbă oarecare, el fiind de forma:
02
≠== vvaaρν , (1.72)
deoarece 0~. == ττ va , deci vectorul accelerație este, în acest caz, perpendicular pe viteză.
Observaţii
1. Legea mişcării uniforme a unui punct pe o curbă oarecare se poate deduce cunoscând că, la acest tip de mişcare, modulul vitezei este constant în intervalul de timp [ ]10 , tt . Deoarece în cadrul genului de mişcări pe care le considerăm viteza nu are discontinuităţi, rezultă că şi mărimea ei algebrică este constantă, adică:
constant~0 == vv (1.73)
Integrând relaţia (1.73) scrisă sub forma 0vdtds
= , se obţine
00 stvs += , (1.74)
care reprezintă legea mişcării uniforme pe o curbă oarecare, unde s este coordonata naturală. Vectorii viteză şi acceleraţie sunt
τ0vv = și νρ
20va = . (1.75)
În acest tip de mişcare componenta tangenţială a acceleraţiei este nulă, iar vectorii v şi a sunt perpendiculari.
Pe baza celor de mai sus, mişcarea uniformă pe o curbă oarecare se poate defini ca mişcarea în cadrul căreia acceleraţia tangenţială este nulă.
v
v
τ τ
M M
1O 1O
ν ν
νaa = νaa =
Fig.1.13. Vectorii v şi a în mişcarea uniformă

MECANICĂ*N* NC.01.Cinematica mișcării absolute a punctului material
- 21 -
2. Dacă pentru [ ]10 , ttt ∈ acceleraţia tangenţială este constantă constant0 == aaτ , mişcarea se
numeşte uniform variată. Deoarece:
saa == 0τ , (1.76)
rezultă, după o primă integrare, relaţia:
00 vtasv +== , (1.77)
iar după a doua integrare:
002
0 2stvtas ++= , (1.78)
care reprezintă legea mișcării uniform variate pe o curbă oarecare.
Vectorii viteză şi acceleraţie sunt
( )τ00 vtav += , ( ) νρ
τ2
000
tavaa ++= . (1.79)
Dacă se elimină timpul între relaţiile (1.77) şi (1.78), se obţine relaţia lui Galilei:
( )0020
2 2 ssavv −+= . (1.80)
3. Dacă se cunosc ecuațiile parametrice ale traiectoriei, se poate calcula raza de curbură a traiectoriei în orice punct al ei. Plecând de la expresia:
βρ
νρ
ττ22. ~~~ vvvvvav =
+×=× (1.81)
și aplicând modulul, rezultă:
av
v×
=3
ρ . (1.82)
În cazul mişcării plane cu legea de mişcare dată de (1.23) raza de curbură are expresia:
( )
yxyxyx
−+
=322
ρ , (1.83)
iar dacă legea de mişcare este dată de (1.29), atunci:
( ) ( )[ ] z
zirrrrrr
rrrrrr
iiiav 2
22
020 θθθθ
θθθθθρ
−−+=+−
=× (1.84)
care conduce la:

MECANICĂ*N* NC.01.Cinematica mișcării absolute a punctului material
- 22 -
( ))()2( 2
3222
θθθθ
θρ
rrrrrr
rr
−−+
+= . (1.85)
Dacă ecuaţia traiectoriei este ( )xfy = , atunci:
( )
yy′′′+
=321
ρ (1.86)
unde cu „' ” s-a notat derivata lui ( )xfy = în raport cu x.
Dacă ecuaţia traiectoriei este ( )θrr = , atunci:
( )rrrr
rr′′−′+
′+=
22
322
2ρ , (1.87)
unde θd
drr =′ .
Dacă ecuaţia traiectoriei este ( ) 0, =yxf , atunci:
( )
∆
+=
322yx ff
ρ , (1.88)
unde
0yx
yyyxy
xxyxx
ffffffff
=∆ , (1.89)
iar indicii notează derivatele parţiale în raport cu variabilele respective.
4. Dacă se cunosc v şi a , acceleraţiile normală şi tangenţială se pot calcula în două moduri:
a) folosind expresia (1.82) se calculează acceleraţia normală
v
avav
vvva
×=×⋅== 3
22
ρν (1.90)
și apoi
22ντ aaa −±= , (1.91)
semnul stabilindu-se în fiecare caz concret, pe baza semnului produsului av ⋅ și a sensului versorului τ ;
b) folosind expresia versorului tangent la traiectorie

MECANICĂ*N* NC.01.Cinematica mișcării absolute a punctului material
- 23 -
vv~=τ , (1.92)
se calculează acceleraţia tangenţială
( ) vv
vavv
vvaaaa 2~~
~ ⋅=
⋅=⋅== τττττ , (1.93)
iar utilizând relaţia:
( ) ( )vavvavav ××=⋅−2 , (1.94)
se calculează acceleraţia normală
( ) ( )22
2
2 vvav
vvvaavv
vvaaaaa ××
=⋅−
=⋅
−=−= τν . (1.95)
5. Singura mișcare cu accelerație nulă este mișcarea rectilinie și uniformă.
Într-adevăr, dacă 0=a , atunci 0=a , ceea ce înseamnă că τa şi νa sunt nule. Ultimele două
relaţii conduc la:
0=s și 02=
ρv . (1.96)
Integrând prima relaţie de mai sus, se obţine
constant0 == vs , (1.97)
ceea ce arată că mişcarea este uniformă. A doua relaţie din (1.96) conduce la:
01=
ρ, (1.98)
ceea ce arată că mişcarea se produce pe o dreaptă.
6. Singurele mișcări în care viteza este coliniară cu accelerația sunt mișcările rectilinii.
Dacă viteza şi acceleraţia sunt coliniare, atunci componenta normală a accelerației trebuie să fie nulă, ceea ce revine la (1.98), adică traiectoria este rectilinie.
Dacă traiectoria este rectilinie, atunci are loc relația (1.98), care conduce la anularea componentei normale a accelerației. Rezultă că accelerația are doar componenta tangențială, care este coliniară cu viteza.
Studiul mişcării punctului în coordonate sferice
Se consideră un reper fix Oxyz și un punct mobil M, al cărui vector de poziție în raport cu polul O este r (fig.1.14.). Distanța de la originea O a sistemului de referință la punctul M este un număr real pozitiv, notat r, și care se numește coordonata radială sau raza. Se notează cu ρ proiecția vectorului
de poziție r pe planul xOy, versorul acestui vector fiind notat ρi și având sensul pozitiv în sensul

MECANICĂ*N* NC.01.Cinematica mișcării absolute a punctului material
- 24 -
creșterii mărimii vectorului ρ . Unghiul orientat dintre axa Ox și vectorul ρ este notat cu ϕ și se numește unghi azimutal. Unghiul orientat dintre axa Oz și vectorul de poziție r este notat cu θ și poartă denumirea de unghi de înclinare, colatitudine sau unghi zenital. Tripleta:
)2,0[)(),(
),0[)(),(),0[)(),(
πϕϕϕπθθθ
∈=∈=
∞+∈=
tttt
trtrr (1.99)
reprezintă coordonatele sferice ale punctului M.
Reperul atașat punctului M este format din următoarele trei axe:
- axa radială, care este coliniară cu vectorul de poziție r , al cărei versor ri are sensul pozitiv orientat în sensul creșterii mărimii vectorului r ;
- axa transversală, care este perpendiculară pe vectorul r și totodată situată în planul determinat de vectorul r și axa Oz , al cărei versor θi are sensul pozitiv orientat în sensul creșterii lui θ;
- axa normală, care este perpendiculară pe primele două deci și pe planul determinat de vectorul r și axa Oz, al cărei versor ϕi are sensul pozitiv orientat în sensul creșterii lui φ ( θϕ iii r ×= ). Cei trei
versori formează o bază ortonormată.
Versorul ρi se descompune după axele Ox și Oy și are următoarea expresie analitică:
jii ϕϕρ sincos += . (1.100)
Folosind expresia de mai sus și figurile 1.15,a și 1.15,b, se pot scrie expresiile analitice ale celor trei versori ai reperului sferic:
M
r
ri
θi
ϕi
ϕ
θ
O
x
y
z
Fig.1.14. Coordonatele sferice și reperul atașat punctului.
ρ ρi

MECANICĂ*N* NC.01.Cinematica mișcării absolute a punctului material
- 25 -
kjikiir θϕθϕθθθ ρ cossinsincossincossin ++=+= (1.101)
kjikii θϕθϕθθθ ρθ sinsincoscoscossincos −+=−= (1.102)
jii ϕϕϕ cossin +−= (1.103)
Deoarece vectorul de poziție al punctului M este:
),( ϕθrirr = (1.104)
iar viteza și accelerația punctului se obțin prin derivarea succesivă în raport cu timpul a acestei expresii, este necesar să se calculeze mai întâi derivatele versorilor reperului sferic în raport cu
coordonatele θ și ϕ, pentru a putea calcula expresia vitezei și expresia accelerației în coordonate sferice. Aceste derivate sunt:
θθϕθϕθθ
ikjid
id r =−+= sinsincoscoscos (1.105)
ϕθϕϕθϕθϕθϕ
ijijid
id r sin)cossin(sincossinsinsin =+−=+−= (1.106)
rikjid
id−=−−−= θϕθϕθ
θθ cossinsincossin (1.107)
ϕθ θϕϕθϕθϕθϕ
ijijid
id cos)cossin(coscoscossincos =+−=+−= (1.108)
0=θϕ
did
(1.109)
θρϕ θθϕϕϕ
iiijid
idr cossinsincos −−=−=−−= . (1.110)
ρi
k θ
θ
ρ
z
θi
ri
θ j
i ϕ
y
x
ϕi
ϕ ρ
a b
Fig.1.15. a) Poziția versorilor ri și θi ; b) Poziția versorului ϕi

MECANICĂ*N* NC.01.Cinematica mișcării absolute a punctului material
- 26 -
Descompunerea lui ρi după direcțiile lui ri și θi se deduce din figura 1.15,a.
Viteza punctului M în coordonate sferice rezultă prin derivarea în raport cu timpul a vectorului de poziție dat de relația (1.104). Se obține:
++=+===
dtd
did
dtd
didriririr
dtird
dtrdv rr
rrrr ϕ
ϕθ
θ
)( . (1.111)
După înlocuirea relațiilor (1.105) și (1.106) în (1.111), rezultă formula finală a vitezei punctului M în coordonate sferice
ϕθ θϕθ iririrv r sin ++= . (1.112)
Componentele vitezei și modulul acesteia sunt:
( ) ( ) ( )222 sin,sin,, θϕθθϕθ ϕθ rrrvrvrvrvr ++==== . (1.113)
Accelerația punctului M în coordonate sferice rezultă prin derivarea în raport cu timpul a vectorului viteză dat de relația (1.112). Se obține:
dt
iririrddtvda r )sin( ϕθ θϕθ ++== , (1.114)
din care rezultă:
ϕϕϕϕθθθ θϕθθϕθϕθϕθθθ iririririririririra rr
sincossinsin ++++++++= (1.115)
Ținând cont că:
ϕϕ
θθ
ϕϕ
θθ
ϕϕ
θθ
ϕϕ
θθ
ϕϕ
θθ
ϕϕ
θθ
ϕϕϕϕϕ
θθθθθ
did
did
dtd
did
dtd
did
dtid
did
did
dtd
did
dtd
did
dtid
did
did
dtd
did
dtd
did
dtid rrrrr
+=+=
+=+=
+=+=
(1.116)
și folosind relațiile (1.105), (1.106), (1.107), (1.108), (1.109) și (1.110) se obține, după înlocuiri, formula finală a accelerației în coordonate sferice:
ϕθ θϕθθϕθϕθθϕθθθϕθ irrrirrrirrra r )cos2sin2sin()cossin2()sin( 2222 +++−++−−= .
(1.117)
Componentele accelerației și modulul acesteia sunt:
,sin222 θϕθ rrrar −−=
,cossin2 2 θθϕθθθ rrra −+=
,cos2sin2sin θϕθθϕθϕϕ rrra ++=

MECANICĂ*N* NC.01.Cinematica mișcării absolute a punctului material
- 27 -
2222222 )cos2sin2sin()cossin2()sin( θϕθθϕθϕθθϕθθθϕθ rrrrrrrrra +++−++−−= (1.118)
Pe baza figurii 1.14 se poate deduce legătura dintre coordonatele sferice r, θ și φ ale punctului M și coordonatele sale carteziene x, y și z:
θ
ϕθϕθ
cossinsincossin
rzryrx
===
. (1.119)
Din relațiile (1.119) se deduce legătura dintre coordonatele carteziene x, y și z și coordonatele sferice r, θ și φ:
=
=++=
xy
rzzyxr arctg;arccos;222 ϕθ . (1.120)
NC.01.3. Aplicație
Legea de mişcare a unui punct este tx 2= şi 14 2 −= ty . Să se determine: traiectoria, viteza, acceleraţia, caracterul mişcării, acceleraţia normală, raza de curbură, acceleraţia tangenţială. Pentru
5,0=t s să se deseneze viteza şi acceleraţia cu componentele lor.
Rezolvare
Ecuaţia traiectoriei se obţine eliminând parametrul t între relaţiile care reprezintă legea de mişcare și
care sunt totodată și ecuaţiile parametrice ale traiectoriei. Din prima relaţie rezultă 2xt = şi,
înlocuind în cea de a doua, rezultă 12 −= xy , care este ecuaţia unei parabole ce este reprezentată în
figura 1.22. Deoarece t este pozitiv, rezultă 0≥x , deci traiectoria punctului este numai ramura din dreapta a parabolei. Punctul pleacă pe traiectorie în momentul 0=t din vârful acesteia ( ( ) 00 =x , ( ) 10 −=y ).
y
O νa ν
yv
a
τ τa
v
M(1,0) xv x
Fig.1.22. Traiectoria punctului M

MECANICĂ*N* NC.01.Cinematica mișcării absolute a punctului material
- 28 -
Deoarece coordonata tx 2= este strict crescătore, rezultă că punctul pleacă din vârful parabolei pe ramura din dreapta, îndepărtându-se mereu de acesta.
Viteza punctului este:
jtijyixv 82 +=+= ,
iar acceleraţia:
jjyixa 8=+= .
Caracterul mişcării este dat de poziţia faţă de zero a produsului av ⋅
064 >=⋅ tav ,
deci mişcarea este accelerată. Rezultă că punctul pleacă din vârful parabolei pe ramura din dreapta, având o mişcare accelerată, deci el nu se va mai întoarce pe traiectorie.
Raza de curbură se calculează cu formula (1.82), dar, mai întâi, se determină:
ktkji
av 16080082 ==× ,
de unde
( )16644
323 tav
v +=
×=ρ .
Acceleraţia normală este:
( )
νννρν 232
22
644
1616644
644
tt
tva+
=⋅+
+== .
Acceleraţia tangenţială se calculează cu relația:
τττντ 2222
644
64644
25664t
tt
aaa+
±=+
−±=−±= .
Deoarece v şi τ au, în acest caz, acelaşi sens şi pentru că mişcarea este accelerată v şi τa au
acelaşi sens, rezultă că τ şi τa au acelaşi sens, deci semnul corect în relaţia de mai sus este pozitiv, rezultând
ττ 2644
64
t
ta+
= .
Deoarece mărimea algebrică a lui τa nu este constantă, rezultă că mişcarea punctului nu este uniform accelerată, ci numai accelerată. Problema evidenţiază clar faptul că, deşi acceleraţia

MECANICĂ*N* NC.01.Cinematica mișcării absolute a punctului material
- 29 -
punctului este constantă, mişcarea acestuia nu este uniform accelerată deoarece caracterul uniform accelerat este dat de condiţia ca acceleraţia tangenţială să fie constantă şi nu cea totală.
Pentru 5,0=t s punctul are coordonatele 0respectiv1 == yx şi se obține:
jiv 42 += , ja 8= , νν 558
=a , ττ 5516
=a ,
vectori reprezentați în fig.1.22.

MECANICĂ*N* NC.02.Mișcări particulare ale punctului material
- 30 -
Capitolul NC.02. Mișcări particulare ale punctului material
Cuvinte-cheie Mişcarea rectilinie, Legea de mişcare, Mişcarea rectilinie şi uniformă, Mişcarea rectilinie uniform variată,
Mișcarea rectilinie oscilatorie armonică, Mişcarea circulară a punctului material, Mişcarea circulară uniformă, Mişcarea circulară uniform variată, Mișcarea circulară oscilatorie armonică,
Mişcarea punctului material pe elicea cilindrică de pas constant, Raza de curbură.
NC.02.1. Mişcarea rectilinie a punctului material
În mişcarea rectilinie, traiectoria este un segment de dreaptă sau o dreaptă, coordonata naturală ( )ts coincide cu abscisa ( )tx , legea de mișcare fiind
( ) ( )tstxx == ( )0,0 == zy , (2.1)
în care versorul τ este un vector constant i=τ , iar 01=
ρ.
Viteza şi acceleraţia sunt complet precizate de către mărimile lor algebrice
( )txv =~ , ( )txa =~ , [ ]10 , ttt ∈ (2.2)
şi, din acest motiv, uneori nu se mai folosesc expresiile vectoriale.
În mişcarea rectilinie oarecare, adică în cazul în care legea de mişcare ( )txx = este o funcţie
oarecare, viteza şi acceleraţia au expresiile
τsixrv === (2.3)
ivsixra ~==== τ (2.4)
deci sunt coliniare. Dacă într-un interval de timp viteza şi acceleraţia au acelaşi sens, atunci mişcarea este accelerată, dacă au sensuri opuse, mişcarea este încetinită, iar dacă accelerația este nulă, mișcarea este uniformă.
Funcțiile date de (2.1) și (2.2) se pot reprezenta grafic având timpul în abscisă. Când pe ordonată
este ( )tx , curba se numeşte grafic al mişcării sau diagrama mişcării. Când pe ordonată este ( )tx sau ( )tx , graficele acestor funcţii se numesc diagrama vitezei şi respectiv diagrama acceleraţiei.
Pentru anumite forme ale legii de mișcare ( )tx , se obţin mişcări rectilinii particulare. În continuare vor fi prezentate cele mai importante dintre acestea.
a) Mişcarea rectilinie şi uniformă este mişcarea pentru care este valabilă relaţia (1.74), scrisă sub forma
tvxx 00 += , [ ]1,0 tt∈ , (2.5)
unde 0x şi 0v sunt constante reale, ce reprezintă poziţia punctului la momentul iniţial 0=t şi
respectiv viteza punctului pe traiectorie.

MECANICĂ*N* NC.02.Mișcări particulare ale punctului material
- 31 -
Vectorii viteză şi acceleraţie sunt de forma:
ivv 0= , 0=a , [ ]10,ttt∈ , (2.6)
ceea ce arată că vectorul viteză este constant iar vectorul acceleraţie este nul.
Diagrama mişcării (fig. 2.1) este o dreapta pentru care 0tg vxdtdx
=== α , adică panta dreptei este
viteza punctului.
Fig.2.1. Diagrama mişcării rectilinii și uniforme
b) Mişcarea rectilinie uniform variată este mişcarea pentru care este valabilă legea de mişcare dată de (1.78), scrisă sub forma:
002
0 2xtvtax ++= , [ ]10,ttt∈ , (2.7)
unde 0x și 0v reprezintă poziţia şi viteza punctului la 0tt = , iar 0a este acceleraţia constantă a
punctului pe traiectorie.
Vectorii viteză şi acceleraţie sunt de forma:
( )ivtav 00 += , iaa 0= , [ ]10,ttt∈ , (2.8)
ceea ce arată că vectorul accelerație este un vector constant.
Diagrama de mişcare este o parabolă, diagrama vitezei este o dreaptă, având panta egală cu acceleraţia punctului iar diagrama acceleraţiei este o dreaptă paralelă cu axa absciselor.
Mişcarea poate fi uniform accelerată când viteza şi acceleraţia au acelaşi sens, sau uniform încetinită, când viteza şi acceleraţia au sensuri opuse.
c) Mișcarea rectilinie oscilatorie armonică are loc atunci când legea de mișcare are forma:
( )α+= ktAx sin , [ ]1,0 tt ∈ (2.9)
unde kA, și α sunt constante.
( )tx
0x
O
00 xtvx +=
α
1t
t t0

MECANICĂ*N* NC.02.Mișcări particulare ale punctului material
- 32 -
Abscisa x se numeşte elongaţie şi are valorile extreme +A şi –A, unde A>0 se numeşte amplitudine. Argumentul αϕ += kt este faza oscilaţiei, k este pulsaţia oscilaţiei (notată adesea cu ω), iar
( )0ϕα = este faza iniţială, adică la momentul t = 0.
Mişcarea are loc de o parte şi de alta a punctului O, numit centru de oscilaţie (fig.2.2.) şi este periodică. Perioada T este intervalul de timp dintre două treceri succesive ale punctului prin aceeaşi poziţie și în acelaşi sens. Ea se calculează folosind relaţia bazată pe definiția perioadei
( ) ( )txTtx =+ 0≥∀t . (2.10)
Din legea de mișcare rezultă următoarea relație
( )[ ] ( )αα +=++ ktATtkA sinsin , (2.11)
deci
( ) παα 2++=++ ktTtk . (2.12)
Din relația (2.12) se obține că perioada oscilației este:
k
T π2= [s], (2.13)
ceea ce arată că aceasta nu depinde de amplitudinea mișcării ci numai de pulsaţia ei.
Fig.2.2. Mișcarea rectilinie oscilatorie armonică a punctului M
Frecvența oscilaţiei este:
π
ν2
1 kT== [Hz] (2.14)
şi reprezintă numărul de oscilaţii complete (de perioade) efectuate în unitatea de timp. Ea se măsoară în hertzi.
Viteza şi acceleraţia au expresiile:
( )α+== ktAkxv cos~ (2.15)
( ) xkktAkxva 22.sin~~ −=+−=== α , (2.16)
ceea ce arată că acceleraţia este proporțională cu elongaţia.
Diagrama de mişcare este prezentată în fig.2.3.
A− A+
M x
O

MECANICĂ*N* NC.02.Mișcări particulare ale punctului material
- 33 -
NC.02.2. Mişcarea circulară a punctului material
Traiectoria fiind dată, mişcarea poate fi studiată folosind proiecţiile vitezei şi acceleraţiei pe axele triedrului Serret-Frenet.
Fie M un punct mobil pe un cerc de centrul O şi rază R şi O1 un punct fix pe circumferinţă, numit origine, în raport cu care se exprimă coordonata naturală s a punctului mobil. Axele triedrului lui Frenet sunt (fig.2.4.):
tangenta în M la cerc, având versorul τ orientată în sensul crescător al arcului sMO =1 ;
normala principală, având direcția razei cercului în punctul M și versorul ν orientat spre centrul O care este și centrul de curbură. Raza de curbură ρ este constantă și egală cu raza cercului, de
altfel cercul fiind singura curbă plană cu raza de curbură constantă;
binormala, perpendiculară în M pe planul cercului, având versorul ντβ ×= , nefigurat în desen.
Fig.2.4. Mişcarea circulară a punctului M
Notând cu θ unghiul dintre OO1 şi OM, a cărui mărime variază în timpul mişcării şi considerând coordonata naturală s din punctul O1 în sensul în care θ creşte, lungimea arcului de cerc egală cu produsul dintre raza cercului şi unghiul la centru exprimat în radiani, este
θ⋅= Rs , [ ]1,0 tt∈ , (2.17)
în care
O θ
τ M
s
1O + ‒
ν
T
A 0x
( )α+= ktAx sin
Fig.2.3. Diagrama de mişcare
x O
y

MECANICĂ*N* NC.02.Mișcări particulare ale punctului material
- 34 -
( )tθθ = , [ ]1,0 tt∈ . (2.18)
Rezultă că mişcarea circulară este caracterizată de funcţia ( )tss = , sau de funcţia ( )tθθ = .
Derivata în raport cu timpul a unghiului ( )tθθ = se numeşte viteză unghiulară:
( )tθω =~ , (2.19)
iar derivata vitezei unghiulare se numeşte acceleraţie unghiulară
( )tθωε ==.~~ . (2.20)
Viteza unghiulară ω~ arată sensul mişcării, adică sensul de rotaţie, şi se măsoară în radiani pe
secundă sau 1−s .
Acceleraţia unghiulară ε~ se măsoară în 2−s şi caracterizează variaţia vitezei unghiulare.
Pe baza faptului că ωθ ~RRs == , viteza punctului M este:
τωτθτ ~RRsv === , ω~Rv = , ωRv = . (2.21)
Acceleraţia punctului M, folosind faptul că εθ ~RRs == şi că raza de curbură a cercului este R=ρ , capătă expresia:
ντενωτενθτθRvRRRRRa
222 ~~ +=+=+= (2.22)
cu componentele:
ετ~Ra = ,
RvRa
22 == ων (2.23)
şi modulul:
42 ωε += Ra . (2.24)
Pentru a preciza caracterul accelerat, încetinit sau uniform al mişcării, se calculează produsul av ⋅ :
===⋅=⋅
2~~~~
22.22 ω
ωωεωτ dtdRRRavav , (2.25)
care arată că atunci când 0~~ >⋅εω , adică ω~ şi ε~ au acelaşi semn, mişcarea este accelerată, deoarece ω creşte, iar când 0~~ <⋅εω , adică ω~ şi ε~ au semne diferite, mişcarea este încetinită,
deoarece ω scade. Când, într-un interval de timp 0~~ =⋅εω , atunci înseamnă că 0~ =ε , iar mişcarea
este uniformă şi are loc cu viteză unghiulară constantă 0ω . În figura 2.5 sunt reprezentate viteza şi
acceleraţia în cele trei situaţii.

MECANICĂ*N* NC.02.Mișcări particulare ale punctului material
- 35 -
Ca şi în cazul mişcării rectilinii, în mişcarea circulară sunt trei situaţii particulare importante.
a) Mişcarea circulară uniformă, caracterizată de faptul că viteza are modul constant, ceea ce implică:
.0 cst== ωθ și 0~ == εθ . (2.26)
Rezultă că legea mişcării circulare uniforme este:
t00 ωθθ += , [ ]1,0 tt ∈ , (2.27)
unde ( )00 θθ = . Dacă la 0=t avem 00 =θ , adică punctul M pleacă din O1, legea mişcării
circulare uniforme devine:
t0ωθ = , [ ]1,0 tt ∈ (2.28)
Se observă că în această mişcare particulară viteza unghiulară este constantă, iar acceleraţia unghiulară este nulă. Expresiile vitezei, acceleraţiei şi ale modulelor lor sunt:
τω0Rv = , .00 cstvRv === ω , (2.29)
νων20Raa == ,
RvRa
202
0 == ω , (2.30)
ceea ce arată că viteza şi acceleraţia sunt perpendiculare.
În cele mai multe situaţii practice, se cunoaşte numărul de rotaţii pe minut (turaţia), n, pe care le execută punctul M. Viteza unghiulară este dată de:
3060
20
nn ⋅=
⋅⋅=
ππω , (2.31)
iar legea de mişcare devine
tn30πθ = . (2.32)
b) Mişcarea circulară uniform variată este caracterizată prin aceea că .0 cstaa ==τ , ceea ce implică
v
τa a
νa θ M
1O ω~ ε~
O
v ω~ ε~
τa
1O a
θ
νa
O
M
O
νaa = M
v ω~
1O θ
Fig.2.5. Vectorii viteza şi acceleraţie în mişcarea circulară accelerată, încetinită și uniformă

MECANICĂ*N* NC.02.Mișcări particulare ale punctului material
- 36 -
.~0 cst== εε (2.33)
Integrând de două ori, se obţine:
10~ Ct += εω , (2.34)
și
212
0 2CtCt
++= εθ . (2.35)
Constantele C1 şi C2 sunt viteza unghiulară şi respectiv unghiul θ la momentul iniţial 0=t :
( ) 100~ C== ωω , (2.36)
( ) 200 C== θθ . (2.37)
Legea mişcării circulare uniform variate (7.149) se scrie acum:
002
0 2θωεθ ++= tt , [ ]1,0 tt ∈ , (2.38)
iar viteza, acceleraţia şi modulele lor sunt:
( )τεω tRv 00 += , tRv 00 εω += , (2.39)
( ) νεωτε 2000 tRRa ++= , ( )200
20 tRa εωε ++= . (2.40)
c) Mișcarea circulară oscilatorie armonică are legea de mișcare:
( )αθ +Θ= ktsin , (2.41)
în care Θ , k şi α sunt constante și se numesc amplitudine, pulsație și fază inițială.
Viteza şi acceleraţia unghiulară se obţin prin derivare şi sunt de forma:
( )αθω +Θ== ktk cos~ , (2.42)
( ) θαθωε 22.sin~~ kktk −=+Θ−=== , (2.43)
cu care se deduc foarte simplu expresiile vitezei și accelerației.
Observaţie:
Mişcarea circulară se poate studia şi în coordonate carteziene sau polare.
În coordonate carteziene, alegând axa Ox după direcţia 1OO (fig.2.4.), avem:
θcosRx = , θsinRy = , (2.44)
astfel că se obține:
jRiRv θθθθ cossin +−= , (2.45)

MECANICĂ*N* NC.02.Mișcări particulare ale punctului material
- 37 -
( ) ( ) jRiRa θθθθθθθθ sincoscossin 22 −++−= . (2.46)
În coordonate polare, luând semiaxa polară pe direcţia 1OO (fig.2.4.), versorii axelor vor fi:
τ=ni , νρ −=i (2.47)
iar
Rr = , ( )tθθ = , [ ]1,0 tt ∈ . (2.48)
Deoarece 0=r , viteza şi acceleraţia capătă forma:
θθiRv = , (2.49)
niRiRa θθ ρ +−= 2 , (2.50)
iar viteza areolară este
221 θR=Ω . (2.51)
NC.02.3. Mişcarea punctului material pe elicea cilindrică de pas constant
Se consideră un punct M care se deplasează pe o elice cilindrică situată pe un cilindru circular drept de rază R, pasul h al elicei fiind constant, iar unghiul de înfăşurare fiind β (fig.2.6,a). Se desfăşoară
elicea, obţinându-se segmente paralele de traiectorie (fig.2.6,b), punctele A şi A', B şi B', C şi C' fiind puncte care coincid atunci când elicea este înfăşurată pe cilindru.
Din triunghiul dreptunghic A'AB se deduce tangenta unghiului de înfăşurare:
R
hπ
β2
tg = . (2.52)
Ecuaţiile de mişcare ale punctului M sunt:
z
C
B
M O A
x θ
M ′ y
a.
C
B
A
h
h
b.
Rπ2 θR M ′
z β A′
M
B′
C′
Fig.2.6. Mişcarea punctului pe elicea cilindrică de pas constant

MECANICĂ*N* NC.02.Mișcări particulare ale punctului material
- 38 -
θcosRx = , θsinRy = , βθ tgRz = , (2.53)
în care ( )tθθ = .
Viteza şi acceleraţia punctului M au expresiile:
kRjRiRv βθθθθθ tgcossin ++−= , (2.54)
( ) ( ) kRjRiRa βθθθθθθθθθ tgsincoscossin 22 +−++−= , (2.55)
şi modulele:
βθ
cos
Rv = , 4
2
2
cosθ
βθ
+= Ra . (2.56)
Se calculează raza de curbură cu ajutorul componentei tangenţiale a acceleraţiei:
β
ρτν 222
2
22
2
22
22
cos~R
va
v
va
v
aa
vav
=−
=−
=−
==
, (2.57)
ceea ce arată că raza de curbură a traiectoriei este constantă în orice punct.
NC.02.4. Aplicație
1. Un punct P descrie o traiectorie plană formată din două arce de cerc racordate, având unghiurile la centru 11 =θ rad și respectiv 12 =θ rad, iar razele cercurilor sunt 101 =R m și 322 =R m (fig.2.7.). Punctul are o mișcare uniform încetinită, plecând din A cu viteza 100 == vvA m/s și
ajungând în D cu viteza 4=Dv m/s. Să se determine viteza și accelerația punctului și să se
reprezinte diagramele ( )tvv = , ( )taa ττ = și ( )taa νν = .
Pentru a afla mărimea algebrică a acceleraţiei tangenţiale, se utilizează formula (1.80), rezultând:
A τ 0v
νa τa
νa νa ν ν B τ Bv τa
τa νa
D Dv Fig.2.7. Traiectoria punctului P

MECANICĂ*N* NC.02.Mișcări particulare ale punctului material
- 39 -
svva AD
2
220
−= ,
în care 422211 =+= θθ RRs m.
Se obține:
20 sm1−== τaa ,
iar vectorul acceleraţie tangenţială este:
ττ ⋅−= 1a .
Viteza se calculează cu relaţia dată de (1.79), rezultând:
( )τtv −= 10 .
Viteza punctului material în punctul B se calculează folosind relaţia (1.80), obținânduse:
sm9,88010210022 110
20
2 ≈=⋅−=+=+= sRavsavv AAB θ
Timpul Bt , până când punctul ajunge în B, se calculează pe baza relaţiei (1.77), rezultând:
1,11109,8
0
0 =−−
=−
=a
vvt BB s,
iar timpul total Dt de parcurgere a traiectoriei este:
61104
0
0 =−−
=−
=a
vvt DD s.
Acum se poate calcula acceleraţia normală care are expresii diferite pe cele două arce de cerc:
v [m/s]
10
4
4 0 1 2 3 5 6 t[s]
Fig.2.8. Diagrama vitezei ( )tv a punctului

MECANICĂ*N* NC.02.Mișcări particulare ale punctului material
- 40 -
( ) [ ]
( ) [ ]
∈−
∈−
==
.,,32
10
,,0,10
10
2
22
DB
B
tttt
tttva
ν
νν
ρν
În punctul B versorul ν își schimbă sensul, deci își schimbă sensul și componenta normală a accelerației.
νa [m/s2]
10
7,9
2,47
0,5
0 1,1 6 t[s] Fig.2.10 Diagrama accelerației normale ( )taν
τa [m/s2]
0 1 2 3 4 5 6 t[s] -1
Fig.2.9. Diagrama accelerației tangențiale ( )taτ

MECANICĂ*N* NC.02.Mișcări particulare ale punctului material
- 41 -
Diagrama ( )tv este reprezentată în fig.2.8, diagrama ( )taτ în fig.2.9 iar diagrama ( )taν în fig.2.10.
Acceleraţia normală are o discontinuitate în punctul B (la momentul t = 1,1s), ea scăzând instantaneu de la 7,9 m/s2 la 2, 47 m/s2, adică cu 5,43 m/s2 . Dacă ţinem cont şi de schimbarea de sens a vectorului accelerație normală, după cum se vede în figura 2.7, variația este de fapt de 10,37 m/s2. Aceste variaţii bruşte trebuie evitate în practică, fie prin micşorarea vitezei punctului în zona de racordare, fie prin prevederea unei mici porţiuni rectilinii între cele două arce, acceleraţia normală modificându-se în trepte, adică de la 7,9 m/s2 la zero într-un sens şi apoi de la zero la 2,47 m/s2 în sens opus, având astfel două salturi mai mici în loc de unul mare.

MECANICĂ*N* NC.03.Elemente privind mișcarea generală a rigidului
- 42 -
Capitolul NC.03. Elemente privind mișcarea generală a rigidului
Cuvinte-cheie Solid rigid, Sistem de referinţă fix, Sistem de referinţă propriu, Matricea de schimbare de bază,
Poziţia, Grade de libertate, Rotire, Unghiurile lui Euler, Viteza unghiulară, Acceleraţia unghiulară, Câmpul vitezelor, Distribuția de viteze, Câmpul accelerațiilor, Distribuția de accelerații,
Axa elicoidală instantanee, Suprafaţa axoidală mobilă, Suprafaţa axoidală fixă, Mişcarea generală a unui solid rigid, Translaţie,
NC.03.1. Considerații generale
Prin solid rigid se înţelege un mediu material pentru care distanţa dintre oricare două puncte ale sale rămâne neschimbată în timp, oricare ar fi forţele aplicate acestui mediu material şi oricare ar fi mişcarea sa. Solidul rigid este o idealizare matematică. În realitate, corpurile solide care se întâlnesc în natură sunt mai mult sau mai puţin deformabile. Totuşi, în anumite condiţii corpurile solide pot fi încadrate în categoria solidelor rigide.
În cazul unui solid rigid vitezele şi acceleraţiile particulelor care-l compun pot varia, atât în raport cu timpul, dar şi de la o particulă la alta. De aceea se vor urmări aceşti parametri cinematici ca funcţii de timp şi spaţiu.
Cunoaşterea mişcării unui solid rigid este echivalentă cu obţinerea expresiilor generale pentru vectorul de poziţie, viteza şi acceleraţia unui punct oarecare al rigidului faţă de un sistem de referinţă fix. Se raportează solidul rigid la două sisteme de referinţă astfel:
un sistem de referinţă exterior, notat E , considerat fix faţă de care se stabilesc parametrii cinematici care definesc mişcarea solidului rigid;
un sistem de referinţă propriu, notat P , legat de solidul rigid şi care se mişcă odată cu acesta. Acest reper se alege cu originea O într-un punct al solidului rigid şi axele orientate după trei axe ale acestuia, perpendiculare între ele (fig.3.1.).
Fig.3.1. Alegerea sistemelor de referință în cazul mișcării generale a rigidului
Fie tkjii ;;= baza de versori ataşată reperului P şi tkjii 0;0;00 = baza de versori ataşată
reperului E .

MECANICĂ*N* NC.03.Elemente privind mișcarea generală a rigidului
- 43 -
Orientarea reperului P este dată de matricea de schimbare de bază de la reperul E la reperul P :
oiPSEi
= . (3.1)
Deoarece nu pot apare confuzii, pentru uşurinţa scrierii se va nota: [ ]SPSE =
. Se va folosi
scrierea cu indici superiori numai atunci când trebuie făcută distincţie între mai multe matrici de schimbare de bază.
Matricea de schimbare de bază depinde de trei parametri, deci orientarea reperului P faţă de reperul E este dată de trei parametri, unghiuri, după cum se va vedea mai târziu.
Poziţia unui punct M , al solidului rigid, faţă de reperul propriu este dată prin vectorul său de poziţie:
tzyxtirtir ;;== . (3.2)
Conform definiţiei solidului rigid, în timpul mişcării, punctul M nu îşi modifică poziţia faţă de
reperul P , deci matricea r , ataşată vectorului r , este constantă.
Numărul de grade de libertate la solidul rigid este egal cu numărul de parametri ce trebuie cunoscuţi pentru a se determina poziţia oricărui punct M al solidului rigid faţă de reperul exterior E . Se poate scrie:
roRR += , (3.3)
în care: oR este vectorul de poziţie al originii O , a reperului P , faţă de originea 0O , a reperului
E .
tOzOyOxtioRtioR 0;0;000 == . (3.4)
Matriceal, relaţia (3.3) capătă forma:
[ ] rtStioRtiR 00 += . (3.5)
Analiza relaţiei (3.5) relevă faptul că pentru determinarea lui R trebuie cunoscute:
mişcarea originii reperului P , faţă de reperul E , caracterizată prin matricea OR , deci trei
parametri scalari;
orientarea reperului P , faţă de reperul E , caracterizată prin matricea de schimbare de bază [ ]S , deci încă trei parametri.
Prin urmare, mişcarea solidului rigid, deci a oricărui punct al său, este dată de şase parametri. În consecinţă solidul rigid are şase grade de libertate. Dacă rigidului i se impun restricţii de mişcare, numărul gradelor de libertate va fi redus corespunzător.

MECANICĂ*N* NC.03.Elemente privind mișcarea generală a rigidului
- 44 -
NC.03.2. Matricea de schimbare de bază
Pentru determinarea matricei de schimbare de bază, trebuie studiat modul de trecere de la reperul E la reperul P , presupuse ca având aceeaşi origine.
În cazurile cele mai simple această trecere se poate face printr-o simplă rotire a reperului E în jurul uneia din axele sale. Apar următoarele posibilităţi:
rotire cu unghiul ϕ în jurul axei 00xO (fig.3.2).
Matricea de schimbare de bază este:
[ ]
−=
ϕϕϕϕ
cossin0sincos0
001S . (3.6)
Fig.3.2. Rotirea în jurul axei 00xO
rotire cu unghiul ϕ în jurul axei 00 yO (fig.3.3).
Fig.3.3. Rotirea în jurul axei 00 yO
Matricea de schimbare de bază este:
[ ]
−=
ϕϕ
ϕϕ
cos0sin010
sin0cosS . (3.7)
rotire cu unghiul ϕ în jurul axei 00zO (fig.3.4.)

MECANICĂ*N* NC.03.Elemente privind mișcarea generală a rigidului
- 45 -
Fig.3.4. Rotirea în jurul axei 00zO
Matricea de schimbare de bază este:
[ ]
−=
1000cossin0sincos
ϕϕϕϕ
S . (3.8)
În cazul general trecerea de la reperul E la reperul P se poate face prin trei rotaţii succesive. În continuare se dă o astfel de succesiune de rotaţii, numită varianta γβα −− ( )zyx ,,,,;si =≠≠ γβαγβαβ :
se roteşte reperul E , cu unghiul 1ϕ , în jurul unei axe a sa, noul reper fiind notat 1T , având axele
notate ',',' OzOyOx . Matricea de schimbare de bază de la reperul E la reperul 1T ,
1TSE , se
determină cu una din relaţiile (3.6 – 3.8);
se roteşte reperul 1T , cu unghiul 2ϕ , în jurul unei axe a sa, noul reper fiind notat 2T şi având
axele notate '','','' OzOyOx . Matricea de schimbare de bază de la reperul 1T la reperul 2T ,
21 TST
, se determină cu una din relaţiile (3.6 - 3.8 );
se roteşte reperul 2T , cu unghiul 3ϕ , în jurul unei axe a sa până se suprapune peste reperul P .
Si în acest caz, matricea de schimbare de bază de la 2T la P ,
PST2 , se determină cu relaţia
adecvată, dintre (3.6 - 3.8 ).
Matricea de schimbare de bază de la reperul exterior la reperul propriu este:
[ ] [ ]
== 1212 T
SETS
TPSTPSES . (3.9)
În continuare se prezintă matricea de schimbare de bază pentru variantele posibile:
- varianta x-y-x:

MECANICĂ*N* NC.03.Elemente privind mișcarea generală a rigidului
- 46 -
[ ]
+−−−+−
−=
321313213132321313213132
21212
CCCSSCCSSCCSSCCCSSCSCCSS
SCSSCS (3.10)
- varianta x-y-z:
[ ]
−+−−−+
=
21212321313213132321313213132
CCCSSSSCCSSSSCCSCCSCSSCSSSCCC
S (3.11)
- varianta x-z-x:
[ ]
+−−−+−−=
313213132132313213132132
21212
CCSCSCSSCCSSSCCCSSSCCCCS
SSSCCS (3.12)
- varianta x-z-y:
[ ]
+−−
−+=
31321313213221212
313213132132
CCSSSCSSSCSCCSCCS
SCCSSSSCSCCCS . (3.13)
- varianta y-x-y:
[ ]
+−−+
−−−=
32131323213121221
321313232131
CCCSSCSCCSSCSCCSS
SCCCSSSSCSCCS (3.14)
- varianta y-x-z:
[ ]
−++−+−+
=
21221321313232131321313232131
CCSCSCSCSSCCCSSSC
SSCCSSCSSSCCS (3.15)
- varianta y-z-x:
[ ]
+−−+++−
−=
313213231321313213231321
21221
CCSSSSCCSSSCSCCSSCCSSCSC
CSSCCS . (3.16)
- varianta y-z-y:
[ ]
+−+−
−−−=
31321323132121221
313213231321
CCSCSSSCSSCCSSCSC
SCCCSCSSSCCCS . (3.17)
- varianta z-x-y:

MECANICĂ*N* NC.03.Elemente privind mișcarea generală a rigidului
- 47 -
[ ]
−+−
−+−=
32321313213122121
323213132131
CCCSCSSCSSSCSCCCS
SCSSCCSSSSCCS . (3.18)
- varianta z-x-z:
[ ]
−+−−−+−
=
22121323213132131323213132131
CSCSSCSCCCSSCCSSCSSSCCCSSCSCC
S (3.19)
- varianta z-y-x:
[ ]
−++−−
−=
32313213132132313213132122121
CCSCCSSSSCSCSCCCSSSCSSSC
SCSCCS . (3.20)
- varianta z-y-z:
[ ]
+−−−−+−
=
22121323132131321323132131321
CSSSCSSCCSCSCSSCCCSSCCCSSSCCC
S . (3.21)
În relaţiile (3.10 - .21) s-au făcut notaţiile: 1cos1 ϕ=C , 1sin1 ϕ=S , 2cos2 ϕ=C , 2sin2 ϕ=S ,
3cos3 ϕ=C , 3sin3 ϕ=S .
De menţionat că trecerea de la reperul E la reperul P se poate face prin rotiri numai în jurul axelor reperului E sau numai în jurul axelor reperului P .
NC.03.3. Unghiurile lui Euler
Din multitudinea de variante de trecere de la reperul exterior la reperul propriu, cu unghiurile corespunzătoare, cea mai des întâlnită are în vedere unghiurile lui Euler. Aceste unghiuri vor fi definite în cele ce urmează.
Se consideră reperele E şi P translatate în aceeaşi origine (fig.3.5.). Dreapta ON , de intersecţie
între planele 000 yOx şi xOy se numeşte linia nodurilor şi are importanţă în definirea unghiurilor
lui Euler, care sunt:
ψ , unghiul de precesie, între dreptele 0Ox şi ON ;
ϕ , unghiul de rotaţie proprie, între dreptele Ox şi ON ; θ , unghiul de nutaţie, între dreptele 00zO şi Oz .
Unghiurile lui Euler corespund variantei z-x-z, cu:
1ϕψ = ; 2ϕθ = ; 3ϕϕ = .

MECANICĂ*N* NC.03.Elemente privind mișcarea generală a rigidului
- 48 -
Unghiurile θϕψ ,, se vor lua în sensul arătat în figura 3.5. Sensul pozitiv al axei ON este dat de
produsul vectorial kk ×0 .
Cele trei unghiuri ale lui Euler împreună cu cele trei coordonate ale originii reperului propriu P , faţă de reperul fix dau cele şase grade de libertate ale solidului rigid.
Fig.3.5. Unghiurile lui Euler
NC.03.4. Viteza şi acceleraţia unghiulară a solidului rigid
Prin definiţie, viteza unghiulară a solidului rigid este egală cu viteza unghiulară a reperului
propriu P faţă de reperul exterior E . Matricea antisimetrică ataşată vectorului viteză unghiulară se
determină cu relaţia:
[ ] [ ][ ]
−−
−==
00
0
xyxz
yztSSωω
ωωωω
ω . (3.22)
De aici se extrag componentele vectorului viteză unghiulară ω , în proiecţii pe axele reperului propriu:
tzyxtiti ωωωωω ;;== . (3.23)
Se dau aceste componente pentru variantele de trecere prezentate:
- varianta x-y-x:
312 ϕϕω += Cx ; 23132 ϕϕω CSSy += ; 23132 ϕϕω SCSz −= (3.24)
- varianta x-y-z:
23132 ϕϕω SCCx += ; 23132 ϕϕω CSCy += ; 312 ϕϕω += Sz (3.25)
- varianta x-z-x:

MECANICĂ*N* NC.03.Elemente privind mișcarea generală a rigidului
- 49 -
312 ϕϕω += Cx ; 23132 ϕϕω SCSy +−= ; 23132 ϕϕω CSSz += (3.26)
- varianta x-z-y:
23132 ϕϕω SCCx −= ; 312 ϕϕω +−= Sy ; 23132 ϕϕω CSCz += (3.27)
- varianta y-x-y:
23132 ϕϕω CSSx += ; 312 ϕϕω += Cy ; 23132 ϕϕω SCSz +−= (3.28)
- varianta y-x-z:
23132 ϕϕω CSCx += ; 23132 ϕϕω SCCy −= ; 312 ϕϕω +−= Sz (3.29)
- varianta y-z-x:
312 ϕϕω += Sx ; 23132 ϕϕω SCCy += ; 23132 ϕϕω CSCz +−= (3.30)
- varianta y-z-y:
23132 ϕϕω SCSx −= ; 312 ϕϕω += Cy ; 23132 ϕϕω CSSz += (3.31)
- varianta z-x-y:
23132 ϕϕω CSCx +−= ; 312 ϕϕω += Sy ; 23132 ϕϕω SCCz += (3.32)
- varianta z-x-z:
23132 ϕϕω CSSx += ; 23132 ϕϕω SCSy −= ; 312 ϕϕω += Cz (3.33)
- varianta z-y-x:
312 ϕϕω +−= Sx ; 23132 ϕϕω CSCy += ; 23132 ϕϕω SCCz −= (3.34)
- varianta z-y-z:
23132 ϕϕω SCSx +−= ; 23132 ϕϕω CSSy += ; 312 ϕϕω += Cz . (3.35)
Componentele vitezei unghiulare în funcţie de unghiurile lui Euler se obţin din relaţiile (3.33):
ϕθψω
ϕθϕθψω
ϕθϕθψω
+=
−=
+=
cos
sincossin
cossinsin
z
y
x (3.36)
Pentru determinarea proiecţiilor vitezei unghiulare pe axele reperului exterior se foloseşte relaţia:
[ ] Ω=== titStiti 00 ωωω . (3.37)
Deci matricea componentelor lui ω faţă de reperul E se calculează cu:

MECANICĂ*N* NC.03.Elemente privind mișcarea generală a rigidului
- 50 -
[ ] ωtS=Ω . (3.38)
Se dau elementele matricei Ω în funcţie de unghiurile lui Euler:
ψθϕ
ψθψθϕ
ψθψθϕ
+=Ω
+−=Ω
+=Ω
cos
sincossin
cossinsin
z
y
x (3.39)
Acceleraţia unghiulară a solidului rigid se obţine derivând în raport cu timpul vectorul viteză unghiulară:
[ ] [ ] [ ]
[ ] [ ] [ ] tt
titititSSti
tStitStitStidtdti
dtd
∂∂
=∂∂
+×=+=+=
=+=
=
==
ωωωωωωωωω
ωωωωωε
000
Deci
== ωε t∂
∂ω , (3.40)
viteza unghiulară derivându-se şi în reperul propriu la fel ca în reperul fix (ca şi cum baza de versori ar fi fixă).
NC.03.5. Distribuţia de viteze şi acceleraţii pentru solidul rigid
Deoarece solidul rigid ocupă un domeniu spaţial, viteza unui punct al său trebuie să fie o funcţie de spaţiu şi timp:
( )tzyxvv ;;;= . (3.41)
Această funcţie trebuie să aibă o formă care să asigure condiţia de rigiditate. Pentru determinarea acestei funcţii se derivează în raport cu timpul vectorul de poziţie al unui punct oarecare M al solidului rigid, vector dat de relaţia (3.5):
[ ] [ ] rtStirtirtStioRtiRMv 0000 +++== . (3.42)
Deoarece vectorul de poziţie al punctului M faţă de reperul propriu ataşat solidului rigid este
constant, 0=r . Se obţine:
[ ][ ] [ ] rtioRtirtSStioRtiMv ω+=+= 00 . (3.43)
Se obţine relaţia vectorială, care exprimă câmpul vitezelor sau distribuția de viteze:
rovMv ×+= ω (3.44)
unde:
ov este viteza originii O a reperului propriu;

MECANICĂ*N* NC.03.Elemente privind mișcarea generală a rigidului
- 51 -
)(tω este viteza unghiulară a solidului rigid;
OMr = .
Matricea coloană ataşată vectorului viteză este:
[ ] rovMv ω+= . (3.45)
Detaliat, relaţiile anterioare, prin proiectare pe axele reperului P conduc la următoarele componente:
;
;
;
xyvv
zxvv
yzvv
yxOzz
xzOyy
zyOxx
ωω
ωω
ωω
−+=
−+=
−+=
(3.46)
Deoarece originea reperului propriu se poate alege în orice punct al solidului rigid, relaţia (3.45) se poate extrapola pentru două puncte ale rigidului:
PMPvMv ×+= ω (3.47)
Această relaţie se numeşte relaţia lui Euler şi face legătura dintre vitezele punctelor P şi M .
Ca şi în cazul vitezelor, distribuţia acceleraţiilor este funcţie de spaţiu şi timp. Pentru determinarea acceleraţiei punctului M se derivează în raport cu timpul relaţia (3.45). Folosind scrierea matriceală, faţă de reperul E aceasta are forma:
[ ] [ ] rtStioRtiMv ω00 += . (3.48)
Dacă se derivează (3.48) în raport cu timpul se obţine:
[ ] [ ] [ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ] [ ] [ ][ ] .
00
0000
rtirti
oRtirtirtSStioRti
rtStirtStirtStioRtiMa
ωωε
ωω
ωωω
++
+=++=
=+++=
(3.49)
În scriere vectorială, câmpul accelerațiilor sau distribuția de accelerații este exprimat de relația:
( )rroaMa ××+×+= ωωε (3.50)
în care: oRtoioa = este acceleraţia originii reperului propriu faţă de reperul exterior; )(tε este
acceleraţia unghiulară a solidului rigid.
Matricea coloană ataşată vectorului acceleraţie este:
[ ] [ ] rroaMa 2ωε ++= . (3.51)
Prin proiectarea pe axele reperului P, componentele acceleraţiei sunt:

MECANICĂ*N* NC.03.Elemente privind mișcarea generală a rigidului
- 52 -
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( ) ;
;
;
22
22
22
yxzaa
xzyaa
zyxaa
xyzyxzyxOzz
zxyxzyxzOyy
yzxzyxzyOxx
ωωωωωωωω
ωωωωωωωω
ωωωωωωωω
++−++−=
++−++−=
++−++−=
(3.52)
În general relaţia (3.50), numită şi relaţia Rivals, se extrapolează pentru două puncte oarecare M şi P ale solidului rigid.
( )PMPMPaMa ××+×+= ωωε . (3.53)
NC.03.6. Proprietăţi ale câmpului de viteze
Proprietatea de rigiditate conduce la următoarele proprietăţi ale câmpului de viteze la solidul
rigid:
Proprietatea 1.
Proiecţiile vitezelor a două puncte M şi P pe dreapta care le uneşte sunt egale şi la fel orientate.
Demonstraţia se face înmulţind scalar relaţia (3.47) cu PMu , versorul dreptei PM . Rezultă:
( ) ⇒⋅×+⋅=⋅ PMuPMPMuPvPMuMv ω
PMuPvPMuMv ⋅=⋅ , (3.54)
deoarece în produsul mixt apar doi vectori coliniari, deci acesta este nul.
Proprietatea 2.
Proiecţiile vitezelor a două puncte M şi P pe direcţia vitezei unghiulare sunt egale şi la fel orientate.
Demonstraţia se face la fel ca la proprietatea 1. Se obţine:
ωω uPvuMv ⋅=⋅ ,
în care ωω
ω =u .
Ca o consecinţă a acestei proprietăţi rezultă că în cazul mişcării cele mai generale a rigidului nu există puncte de viteză nulă. Totodată rezultă că, dacă într-un punct vectorii viteză v şi acceleraţie unghiularăω sunt ortogonali, ei vor fi ortogonali în orice alt punct. Din punct de vedere al distribuţiei vitezelor, rezultă că există doi parametri cinematici care sunt invarianţi absoluţi (aceeaşi în orice punct): vectorul viteză unghiulară ω şi proiecţia vectorului viteză pe direcţia vitezei unghiulare.
Proprietatea 3. (Teorema coliniarităţii extremităţilor vectorilor viteză)
Extremităţile vectorilor viteză ai unor puncte coliniare aparţinând unui rigid în mişcare generală sunt la rândul lor coliniare.

MECANICĂ*N* NC.03.Elemente privind mișcarea generală a rigidului
- 53 -
Pentru demonstraţie se consideră trei puncte PNM ,, ale solidului rigid, coliniare, având vectorii de poziţie PrNrMr ,, faţă de reperul propriu. Vitezele acestor puncte se calculează cu relaţia
(3.47). Extremităţile acestor viteze, care sunt aplicate în cele trei puncte, vor avea următorii vectori de poziţie (punând problema strict geometric):
.ProvPrPvPrCrNrovNrNvNrBr
MrovMrMvMrAr
×++=+=
×++=+=
×++=+=
ω
ω
ω
(3.55)
Prin scădere se obţine:
NPNPBC
MNMNAB
×+=
×+=
ω
ω (3.56)
Dacă se face produsul vectorial între aceşti vectori se obţine:
( ) ( )××+××+×=× MNNPMNNPMNBCAB ωω
( ) ( )NPMNNP ×××+× ωω . (3.57)
Dacă se ţine cont de faptul că vectorii MN şi NP sunt coliniari, deci MN NPk ⋅= , se obţine:
( ) ( )−⋅⋅⋅−⋅⋅+×⋅=× ωω MNMNkMNMNkMNMNkBCAB
( ) ( ) ( )[ ]−⋅×⋅+⋅⋅⋅+⋅⋅− MNkMNMNMNkMNMNk ωωωω
( )[ ] 0=⋅×⋅⋅− ωω MNMNk Deoarece produsul vectorial precedent este nul, punctele A, B şi C sunt coliniare.
Proprietatea 4.
Punctele aparţinând unui rigid în mişcare generală şi care sunt situate pe o paralelă la vectorul ω au aceeaşi viteză.
Demonstraţie: Dacă M şi P se găsesc pe o dreaptă paralelă cu ω se poate scrie ωλ ⋅=PM . Dacă se înlocuieşte în relaţia Euler (3.47) se obţine:
( ) PvPvMv =⋅×+= ωλω (3.58)
Proprietatea 5. Teorema asemănării (Burmester şi Mehmke).
Dacă 1A , 2A , 3A sunt trei puncte situate într-un plan perpendicular pe vectorul viteză unghiulară,
iar 3,2,1 BBB extremităţile vectorilor viteză 1Av ,
2Av ,3Av , vectori care au punctele de aplicaţie în
1A , 2A , 3A atunci există asemănarea de triunghiuri 321~321 BBBAAA ∆∆ .
Demonstraţie. Dacă 3,1; =iiAr , sunt vectorii de poziţie ai punctelor iA , atunci:

MECANICĂ*N* NC.03.Elemente privind mișcarea generală a rigidului
- 54 -
iArov
iAriBr ×++= ω . (3.59)
Se obţine:
jijAiAjAiAjBiB ≠×+= ω . (3.60)
Deoarece vectorul ji AA este perpendicular pe vectorul jAiA×ω , mărimea vectorului ji BB se
calculează cu teorema lui Pitagora:
22
jAiAjAiAjBiB ×+= ω . (3.61)
Dacă se notează cu ijα unghiul dintre vectorul ω şi vectorul jAiA şi se ţine cont de definiţia
produsului vectorial se obţine:
ijjAiAjAiAjBiB αω 2sin222⋅⋅+= . (3.62)
Deoarece toţi vectorii ji AA sunt într-un plan perpendicular pe ω , unghiurile ijα sunt drepte, deci
1sin =ijα . În final:
2
1 ω+=jAiA
jBiB. (3.63)
Prin urmare:
32
32
31
31
21
21AA
BB
AA
BB
AA
BB== ,
deci triunghiurile 1A 2A 3A şi 321 BBB sunt asemenea.
Proprietatea 6. (Teorema de existenţă a axei elicoidale instantanee)
În mişcarea generală a unui solid rigid există puncte ale acestuia ale căror viteze sunt, instantaneu, coliniare cu viteza unghiulară a solidului rigid. Mulţimea acestor puncte este o dreaptă numită axă elicoidală instantanee.
Demonstraţie: Se consideră un punct M al solidului rigid cu proprietatea din enunţ, adică
ωMv . Cu relaţia Euler:
ωω ⋅=×+= krovMv (3.64)
Înmulţind vectorial (3.64) la stânga cu ω , se obţine:

MECANICĂ*N* NC.03.Elemente privind mișcarea generală a rigidului
- 55 -
( ) ( )
−⋅⋅+×=⇒××+×=× 20 ωωωωωωωω rrovrovMv
de unde:
ωλρ ⋅+= Ir (3.65)
în care:
2ω
ωρ ov
I×
=;
2ω
ωλ r⋅= (3.66)
Relaţia (3.65) arată existenţa punctului M cu proprietatea enunţată şi faptul că mulţimea punctelor M este o dreaptă.
Observaţie.
Punctele solidului rigidcare se găsesc pe axa elicoidală instantanee au viteza minimă.
Definiţie:
Suprafaţa axoidală mobilă este suprafaţa riglată, loc geometric al axei elicoidale instantanee faţă de reperul propriu.
Suprafaţa axoidală fixă este suprafaţa riglată, loc geometric al axei elicoidale instantanee faţă de reperul fix.
Ecuaţia vectorială a suprafeţei axoidale mobile rezultă din (3.65)
( ) ( ) ( )ttItr ωλρλ ⋅+=; (3.67)
unde:
( ) ( ) ( )( )t
tovttI 2ω
ωρ
×= . (3.68)
Ecuaţia vectorială a suprafeţei axoidale fixe rezultă imediat:
( ) ( ) ( ) ( )ttItoRtR ωλρλ ⋅++=; (3.69)
Ecuaţiile parametrice ale celor două suprafeţe axoidale se obţin prin proiectarea relaţiei (3.67) pe axele reperului propriu şi a relaţiei (3.69) pe axele reperului exterior.
pentru suprafaţa axoidală mobilă:

MECANICĂ*N* NC.03.Elemente privind mișcarea generală a rigidului
- 56 -
( )( )
( ) ( ) ( ) ( )[ ] ( )
( )( )
( ) ( ) ( ) ( )[ ] ( )
( )( )
( ) ( ) ( ) ( )[ ] ( )tztOxvtytOyvtxt
tz
tytOzvtxtOxvtzt
ty
txtOyvtztOzvtyt
tx
ωλωωω
λ
ωλωωω
λ
ωλωωω
λ
⋅+⋅−⋅=
⋅+⋅−⋅=
⋅+⋅−⋅=
21;
21;
21;
(3.70)
pentru suprafaţa axoidală fixă:
( ) ( )( )
( ) ( ) ( ) ( )[ ] ( )
( ) ( )( )
( ) ( ) ( ) ( )[ ] ( )
( ) ( )( )
( ) ( ) ( ) ( )[ ] ( )tztOxvtytOyvtxt
tOztz
tytOzvtxtOxvtzt
tOyty
txtOyvtztOzvtyt
tOxtx
Ω⋅+⋅Ω−⋅Ω+=
Ω⋅+⋅Ω−⋅Ω+=
Ω⋅+⋅Ω−⋅Ω+=
λω
λ
λω
λ
λω
λ
21
0;0
21
0;0
21
0;0
(3.71)
S-a notat:
000 kOzvjOyviOxvkOzvjOyviOxvov ++=++=
000 kzjyixkzjyix Ω++Ω+Ω=++= ωωωω .
Prin proiectarea relaţiei (3.64) pe axele celor două repere şi eliminarea parametrului k , se obţine ecuaţia axei elicoidale instantanee ca intersecţie de plane. Astfel, faţă de reperul propriu se obţine:
z
xyyxOzv
y
zxxzOyv
x
yzzyOxv
ω
ωω
ω
ωω
ω
ωω +−=
+−=
+− (3.72)
O relaţie asemănătoare se obţine faţă de reperul fix.
Teorema Poncelet: În timpul mişcării solidului rigid suprafaţa axoidală mobilă şi suprafaţa axoidală fixă sunt tangente, se rostogolesc una faţă de cealaltă, fără alunecare şi alunecă una faţă de cealaltă de-a lungul axei elicoidale instantanee.
Demonstraţie. Fie M un punct al axei elicoidale instantanee. Se notează cu ( )PMv viteza punctului M
faţă de reperul P şi cu ( )EMv viteza punctului M faţă de reperul E .
( )tMrP
Mv∂
∂= şi ( )
tdMRdE
Mv =
Pentru efectuarea acestor derivate se scriu relaţiile (3.67) şi (3.69) sub formă matriceală:
ωλρt
iIt
iMr +=

MECANICĂ*N* NC.03.Elemente privind mișcarea generală a rigidului
- 57 -
[ ] [ ] ωλρ tS
tiI
tSt
iORt
iMR 000 ++=
Rezultă imediat:
( ) ωλρ
tiItiP
Mv +=,
respectiv:
( ) [ ] [ ] [ ] ++++= ωλρρ tStitStiI
tStioRtiEMv 01000
[ ] [ ] [ ] ++++=+ ωωλρρωωλ titiItioRitSti 1000
ωλ ti+ .
Viteza de alunecare a celor două suprafeţe axoidale este:
( ) ( ) [ ] IttioRiP
MvEMvalv ρω00 +=−= (3.73)
deoarece termenul [ ] 0=ωωλ ti .
Relaţia (3.73) scrisă vectorial este:
1ρω ×+= ovalv (3.74)
Dacă se ţine cont de relaţia (3.66), care dă expresia lui Iρ , se obţine:
( ) ωω
ωω
ωω
ω
ω
ω
ωω ⋅
⋅=⋅−⋅+=
××+= 2
2222
ovovovovov
ovalv (3.75)
Aceasta arată că suprafaţa axoidală mobilă alunecă de-a lungul axei elicoidale instantanee faţă de suprafaţa axoidală fixă.
Observaţie: Dacă ( )2,1 qqrr = este ecuaţia unei suprafeţe atunci normala la suprafaţă este orientată
după vectorul:
21 qr
qrn
∂∂
×∂∂
= (8.76)
Parametrizarea suprafeţei axoidale mobile fiind dată de (3.67), normala la această suprafaţă este dată de vectorul:
( ) ωλ
×=∂∂
×∂∂
= PMvr
tr
Pn (3.77)
Parametrizarea suprafeţei axoidale fixe fiind dată de (3.69), normala la această suprafaţă este dată de vectorul:

MECANICĂ*N* NC.03.Elemente privind mișcarea generală a rigidului
- 58 -
( ) ω×= EMvEn (3.78)
Se verifică imediat că ( ) ( ) ωω ×=× EMvP
Mv , ceea ce arată că suprafaţa axoidală mobilă şi suprafaţa
axoidală fixă au aceeaşi normală în orice punct de contact, adică rămân tangente.
Observaţie: Cele două suprafeţe axoidale sunt suprafeţe riglate, dar nu orice suprafeţe riglate pot fi suprafeţe axoidale. Deoarece ele sunt tangente de-a lungul axei elicoidale instantanee rezultă că sunt ambele desfăşurabile sau ambele nedesfăşurabile. Deasemenea curbele directoare sunt distincte pentru cele două suprafeţe axoidale.
Pe axa elicoidală instantanee prezintă importanţă punctul principal ( )I care corespunde în (3.65) lui 0=λ . Segmentul OI fiind perpendicular pe ov şi ω , punctului principal îi corespunde câte o curbă directoare principală pentru suprafaţa axoidală fixă şi suprafaţa axoidală mobilă.
NC.03.7. Proprietăţi ale câmpului de acceleraţii la solidul rigid
Proprietatea 1
În mişcarea generală a unui solid rigid există, la orice moment, un punct L , numit pol al acceleraţiilor, care are acceleraţia nulă.
Demonstraţie:
Se pune condiţia 0=La . Cu (3.50) se obţine:
[ ] [ ] 02 =++= LrLrOaLa ωε .
Rezultă sistemul:
[ ] [ ] OaLr −=
+ 2ωε . (3.79)
Această relaţie este un sistem liniar, care în cazul general are determinantul diferit de zero.
[ ] [ ] ( ) 022det ≠×−=
+ εωωε . (3.80)
Prin urmare, sistemul este compatibil determinat, deci există un singur punct al solidului rigid cu acceleraţie nulă, polul acceleraţiilor. Acest punct îşi modifică poziţia în timp atât faţă de sistemul fix cât şi faţă de cel mobil. Dacă în particular determinantul sistemului este nul, sunt posibile următoarele cazuri:
nu există puncte de acceleraţie nulă, caz care corespunde mişcărilor de translaţie şi elicoidală;
există o infinitate de puncte de acceleraţie nulă, situate pe o dreaptă, caz care corespunde mişcărilor de rotaţie şi plan-paralelă.

MECANICĂ*N* NC.03.Elemente privind mișcarea generală a rigidului
- 59 -
În concluzie distribuţia de acceleraţii este specifică fiecărei mişcări particulare ale rigidului. Aceste distribuţii de acceleraţii pot fi reduse la distribuţii instantanee de acceleraţii specifice mişcărilor de translaţie, rotaţie, elicoidală şi sferică, care vor fi studiate în continuare.
Proprietatea 2
Fie A şi B două puncte situate pe o dreaptă paralelă cu axa elicoidală instantanee.
Proiecţiile acceleraţiilor A şi B pe dreapta care le uneşte sunt egale şi la fel orientate.
Demonstraţie:
Se scrie relaţia Rivals între punctele A şi B :
( )ABABAaBa ××+×+= ωωε .
Înmulţind scalar această relaţie cu ABu , versorul dreptei AB se obţine:
( ) ( ) ( ) ( ) ( )ABuABABuABuABuAauBa ABABAB ⋅⋅⋅−⋅⋅⋅+⋅×+⋅=⋅ ωωωωε
Deoarece ω şi AB sunt paraleli, cu definiţia produsului scalar, se obţine:
ABABAB uAaABABuAauBa ⋅=⋅⋅−⋅⋅+⋅=⋅ ωωωω.
NC.03.8. Aplicaţie
Aplicaţia 1
Un solid rigid cu originea reperului propriu punct fix execută o mişcare astfel încât unghiul de precesie se modifică după legea t3=ψ , iar unghiul de nutaţie are variaţia t2=θ . Se cer:
1) Matricea de schimbare de bază.
2) Componentele vitezei şi acceleraţiei unghiulare.
3) Ecuaţiile axei elicoidale instantanee.
Rezolvare
1) Componentele matricei de schimbare de bază se calculează cu relaţia (3.19) în care:
tS 3sin1 = ; tC 3cos1 =
tS 2sin2 = ; tC 2cos2 =
03 =S ; 13 =C .
Se obţine:
[ ]
−−=
tttttttttt
ttS
2cos2sin3cos2sin3sin2sin2sin3cos2cos3sin
03sin3cos
.

MECANICĂ*N* NC.03.Elemente privind mișcarea generală a rigidului
- 60 -
2) Componentele vitezei unghiulare (în proiecţii pe axele reperului propriu) se calculează cu relaţiile (3.36):
2cossinsin =+= ϕθϕθψω x
ty 2sin3sincossin =−= ϕθϕθψω
tz 2cos3cos =+= ϕθψω .
Componentele acceleraţiei unghiulare (proiecţiile pe axele reperului propriu) se obţin prin derivarea componentelor vitezei unghiulare:
0=xε ;
ty 2cos6=ε ;
tz 2sin6−=ε .
3) Axa elicoidală instantanee este dată de relaţiile (3.72) de unde rezulta imediat:
txxz
x
z 2cos23
==ωω
txxy
x
y 2sin23
==ω
ω
.
Eliminând timpul între cele două relaţii se obţine ecuaţia conului polodic:
222
49 xzy =+
.

MECANICĂ*N* NC.04.Mişcări particulare ale rigidului
- 61 -
Capitolul NC.04. Mişcări particulare ale rigidului
Cuvinte-cheie Translaţie, Rigid cu axa fixă, Mişcare elicoidală, Mişcarea de şurub, Mişcare plan-paralelă, Distribuţia de viteze
Axă instantanee de rotaţie, Centru instantaneu de rotaţie, Centroidă fixă, Bază, Axoidă fixă, Centroidă mobilă, Rostogolitoare, Axoidă mobilă, Distribuţia de acceleraţii, Mișcarea rigidului cu punct fix,
Conul polodic, Conul herpolodic, Mişcarea generală, Axa instantanee a mişcării elicoidale
NC.04.1. Mișcarea de translaţie
Prin definiţie, un rigid are o mişcare de translaţie, dacă un segment AB care uneşte două puncte arbitrare A și B ale rigidului, rămâne paralel cu el însuşi, în timpul mişcării.
Fig. 4.1. Deplasarea unui corp aflat în mişcare de translaţie
Traiectoria unui punct al rigidului aflat în mişcare de translaţie poate fi arbitrară și aceasta este reprodusă de toate punctele acestuia (fig. 4.1). În particular, versorii axelor reperului legat de corp,
, ,i j k sunt constanţi. Rezultă: 0, 0, 0i j k= = = și în consecinţa 0x y zω ω ω= = = , deci
0 0ω ε ω= ⇒ = = . (0.1)
Formulele Euler si Rivals devin:
( ) ( )0 0;v v t a a t= = . (0.2)
Rezultă că la un orice moment de timp, câmpurile vitezelor și acceleraţiilor sunt câmpuri constante. Aceasta înseamnă că la un moment t1 , toate punctele rigidului au aceeaşi viteza si aceeaşi acceleraţie, iar acest lucru este adevărat la orice alt moment t2 , dar valorile efective se pot modifica de la un moment la altul. În acest caz, vitezele și acceleraţiile sunt exemple de vectori liberi, putând fi asociaţi oricărui punct al rigidului.
NC.04.2. Mișcarea rigidului cu axă fixă
Prin definiţie, mişcarea unui rigid cu axă fixă este cea în care două puncte ale rigidului sunt fixe în timpul mişcării. Cele două puncte definesc axa de rotaţie și toate punctele acesteia rămân fixe în timpul mişcării. Fiecare punct al rigidului descrie un cerc în jurul axei de rotaţie. Se poate lua axa
z
x
y
O≡A
A’
A’
A

MECANICĂ*N* NC.04.Mişcări particulare ale rigidului
- 62 -
Oz , care coincide cu axa fixa O1z1 ,ca axă de rotaţie (fig. 4.2). Unghiul între axele Ox si O1x1 este θ(t) și defineşte rotaţia rigidului în jurul axei O1z1. Versorii reperului mobil sunt , ,i j k , iar cei ai
reperului fix sunt 1 1 1, ,i j k .
Fig. 4.2. Poziţionarea unui corp aflat în mişcare în jurul axei Oz1 fixă.
Versorii reperului mobil pot fi proiectaţi pe axele fixe:
1 1
1 1
1
cos sinsin cos
i i jj i jk k
θ θθ θ
= +
= − +
=
(0.3)
Derivatele acestor vectori sunt:
( ) ( )( ) ( )
1 1
1 1
sin cos
cos sin
0
i i j j
j i j i
k
θ θ θ θ θ
θ θ θ θ θ
= − + =
= − + − = −
=
(0.4)
Componentele vectorului ω sunt:
0
0x
y
z
j k
k i
i j
ω
ω
ω θ
= ⋅ =
= ⋅ =
= ⋅ =
(0.5)
Rezultă
k kω θ ω= = . (0.6)
În cazul rigidului cu axă fixă, formula lui Euler devine ( 0 0v = ):
x1
O y1
z1
y
x
z ≡
O1≡
_ ω
_ ε
_ j
_ i
_ j1
_ i1
θ
θ

MECANICĂ*N* NC.04.Mişcări particulare ale rigidului
- 63 -
0 0i j k
v r yi xjx y z
ω ω ω ω= × = = − + , (0.7)
Fig. 4.3. Distribuţia vitezelor pentru un corp cu axă fixă
din care se obţin componentele vitezei pe axele reperului mobil Oxyz :
0
x
y
z
v yv v x
v
ωω
= −
= =
. (0.8)
Rezultă că vitezele sunt aceleaşi pe o axă paralelă la axa de rotaţie, deoarece componentele nu depind de coordonata z (fig. 4.3). Altă proprietate a câmpului de viteze este distribuţia liniară a vitezei cu distanta d,
2 2 2 2v x y dω ω ω= + = . (0.9)
Pentru a determina câmpul acceleraţiilor, se introduc în formula lui Rivals următoarele mărimi:
0 0; ;a k kω ω ε ε= = = . Rezultă
( )
( ) ( ) ( ) ( )2 2 2
0 0 0 00
i j k i j ka k r k k r
x y z y x
yi xj xi yj y x i x y j
ε ω ω ε ωω ω
ε ω ε ω ε ω
= × + × × = +−
= − + − + = − − + −
. (0.10)
Proiecţiile acceleraţiei pe axele reperului mobil Oxyz sunt:
x1
O y1
z1
y
x
z ≡
O1≡
_ ω
d

MECANICĂ*N* NC.04.Mişcări particulare ale rigidului
- 64 -
2
2
0
x
y
z
a y x
a x y
a
ε ω
ε ω
= − −
= −
=
. (0.11)
Rezultă că acceleraţia are aceleaşi valori, la un moment dat, pentru punctele situate pe o dreaptă paralelă cu axa z, deoarece variabila z nu apare în relaţiile de mai sus. Modulul acceleraţiei crește liniar cu distanța la axa de rotaţie (fig. 4.4).
Fig. 4.4. Distribuţia acceleraţiilor pentru un corp cu axă fixă
Din (4.11) rezultă că acceleraţia poate fi exprimată prin două componente:
- componenta tangenţială
( ) 2 2a yi xj a x y dτ τε ε ε= − + ⇒ = + = , (0.12)
- componenta normală
( )2 2 2 2 2a xi yj a x y dν νω ω ω= − + = + = . (0.13)
În relaţiile de mai sus, d este distanța până la axa de rotaţie.
NC.04.3. Mișcarea elicoidală
Prin definiţie, un rigid are o mişcare elicoidală, dacă două puncte ale sale rămân pe o dreaptă fixă în timpul mişcării. Mişcarea elicoidală constă într-o translaţie în lungul axei fixe și o mişcare de rotaţie în jurul aceleiaşi drepte. Fiecare punct al rigidului descrie o elice în jurul axei de rotaţie. Se poate lua ca axă Oz axa de rotaţie, care să coincidă cu axa O1z1 a unui reper fix. Unghiul între axele Ox și O1x1 este θ(t) și defineşte rotaţia rigidului în jurul axei O1z1, iar distanța între O1 și O este notată cu z0 (fig. 4.5). Versorii reperului mobil sunt , ,i j k , iar cei ai reperului fix sunt 1 1 1, ,i j k .
Viteza unghiulară ω și viteza axială a Ov v= sunt:
x1
O y1
z1
y
x
z ≡
O1≡
_ ω
_ ε
_ a
_ aτ
_ aν

MECANICĂ*N* NC.04.Mişcări particulare ale rigidului
- 65 -
.
0;not
O ak k v zk v k vω θ ω= = = = = (0.14)
Formula lui Euler devine :
0 0O O O
i j kv v k r v k y i x j v k
x y zω ω ω ω= + × = + = − + + (0.15)
Fig. 4.5. Poziţionarea unui rigid aflat în mişcare elicoidală
de unde se obţin componentele vitezei pe axele reperului mobil Oxyz:
x
y
z O
v yv v x
v v
ωω
= −
= =
. (0.16)
Rezultă că vitezele sunt aceleaşi pe o axă paralelă cu axa de rotaţie, deoarece componentele nu depind de coordonata z (fig. 4.6). Altă proprietate este dependența liniară a componentei tangenţiale în funcţie de distanța d până la axa de rotaţie:
2 2 2 2 2 2t x yv v v x y dω ω ω= + = + = . (0.17)
În formula lui Rivals se înlocuiesc: ; ;O Oa zk a k k kω ω ε ω ε= = = = = . Rezultă:
x1
O
y1
z1
y
x
z ≡
O1
_ ω
_ ε
_ j
_ i _
j1
_ i1
θ
z0 _ k1
_ k

MECANICĂ*N* NC.04.Mişcări particulare ale rigidului
- 66 -
( )
( ) ( ) ( ) ( )2 2 2
0 0 0 00
O O
O O
i j k i j ka a k k r k k r a k
x y z y x
yi xj xi yj a k y x i x y j a k
ε ω ω ε ωω ω
ε ω ε ω ε ω
= + × + × × = + +−
= − + − + + = − − + − +
(0.18)
Fig. 4.6. Distribuţia vitezelor pentru mişcarea elicoidală
Componentele acceleraţiei pe axele reperului mobil Oxyz sunt:
2
2x
y
z O
a y x
a x y
a a
ε ω
ε ω
= − −
= −
=
. (0.19)
Rezultă că acceleraţia are aceeaşi valoare, la un moment dat, pentru toate punctele situate pe o paralelă la axa mişcării elicoidale, deoarece componentele acceleraţiei nu depind de coordonata z. Modulul acceleraţiei crește liniar cu distanţa la axa mişcării elicoidale (fig. 4.7).
Aşa cum rezultă din (4.18), acceleraţia poate fi exprimată prin trei componente:
- o componentă tangenţială
( ) 2 2a yi xj a x y dτ τε ε ε= − + ⇒ = + = , (0.20)
- o componentă normală
x1
y1
z1
y
x
z ≡
_ ω
θ
_
vt
_
va
_
v

MECANICĂ*N* NC.04.Mişcări particulare ale rigidului
- 67 -
( )2 2 2 2 2a xi yj a x y dν νω ω ω= − + = + = (0.21)
- o componentă axială
l Oa a k= , (0.22)
unde d este distanța dintre punctul considerat si axa mişcării elicoidale.
Fig. 4.7. Distribuţia acceleraţiilor pentru mişcarea elicoidală
Mişcarea de şurub
Mişcarea de şurub este o un caz particular al mişcării elicoidale, în care se impune o relaţie de proporţionalitate între viteza unghiulară şi viteza axială:
0 2pv ωπ
= . (0.23)
Constanta p se numeşte pasul şurubului şi reprezintă distanța parcursă de un punct de pe axa şurubului daca şurubul face o rotire completă. Într-adevăr, dacă se integrează ecuaţia precedentă între un moment iniţial (t=0) si momentul arbitrar t, se obţine:
( ) ( )00 0
2 2
t tp pv dt dt z t tω θπ π
= ⇒ =∫ ∫ , (0.24)
x1
y1
z1
y
x
z ≡
_ ω
θ
_ aτ
_ aν
_ al
_ a
_ a
O
O1

MECANICĂ*N* NC.04.Mişcări particulare ale rigidului
- 68 -
care pentru o rotire completă de unghi 2θ π= , conduce la z=p. Legătura între cele două viteze, liniară şi unghiulară, se realizează constructiv prin filetul şurubului. Această legătură se păstrează şi pentru acceleraţia originii sistemului de axe şi cea unghiulară:
0 2pa επ
= , (0.25)
în care 0 0;a v ε ω= = . Prin urmare relaţiile de la paragraful precedent se pot scrie fie în funcţie de viteza și acceleraţia originii, fie în funcţie de viteza și acceleraţia unghiulară a şurubului. Spre
exemplu, componentele vitezei unui punct oarecare al şurubului, se scriu:
0
0
2
2
x
y
z O
v y v yp
v v x v xp
v v
πω
πω
= − = − = = =
(0.26)
din care, modulul componentei tangenţiale rezultă: 02
tv d v dpπω= = , iar modulele componentelor
acceleraţiei unui punct oarecare al şurubului se pot scrie:
0
22 2
02
0
2
4
l
a d a dp
a d v dp
a a
τ
ν
πε
πω
= =
= =
=
(0.27)
NC.04.4. Mişcarea plan-paralelă
Studiul geometric al mişcării plan-paralele
Prin definiţie un rigid are o mişcare plan-paralelă atunci când trei puncte necolineare ale sale (adică un plan al său) rămân tot timpul mişcării conţinute într-un acelaşi plan fix din spaţiu (fig.4.8).
În consecinţă, se aleg sistemul de referință fix şi sistemul de referință mobil astfel încât Oz // O1z1 , Oxy (notat cu [P]) este planul mişcării, iar O1x1y1 (notat cu [P1]) este planul fix. Caracteristicile mişcării plan-paralele a rigidului sunt descrise în continuare.
1) Poziţia corpului la un moment dat este precizată de către vectorul de poziţie al originii sistemului
de referinţă mobil, Or , precum şi de unghiul de rotaţie al acestuia faţă de sistemul de referinţă fix,
deci cu ajutorul a trei parametri independenţi, care sunt
,)(,)(,)( ttyytxx OOOO θθ === (4.28)
ceea ce arată că rigidul în mişcare plan-paralelă să aibă trei grade de libertate.

MECANICĂ*N* NC.04.Mişcări particulare ale rigidului
- 69 -
Fig. 4.8. Poziţionarea unui corp aflat în mişcare plan-paralelă
2) Ca şi la mişcarea de rotaţie, deoarece Oz // O1 z1 , 1kk ≡ , şi ca urmare vectorii ω şi ε au expresiile:
,kkkz θωωω === (4.29)
,kkkk zz εθωεε ==== (4.30)
şi caracteristicile descrise la mişcarea de rotaţie a rigidului.
3) În ceea ce priveşte viteza şi acceleraţia originii sistemului de referinţă mobil, acestea au expresiile:
.
,
jaiajyixa
jvivjyixv
OyOxOOO
OyOxOOO
+=+=
+=+=
(4.31)
Observaţie: Ov şi Oa sunt conţinute în planul mişcării Oxy .
Distribuţia de viteze. Proprietăţi
Determinarea distribuţiei de viteze specifice în mişcarea plan-paralelă, se face, ca şi în celelalte cazuri, plecând de la formula lui Euler,
,rvv O ×+= ω
în care se introduc particularităţile anterioare. Se obţin expresiile proiecţiilor pe axele sistemului de referință mobil:
.0
=+=−=
z
Oyy
Oxx
vxvvyvvωω
(4.32)
Aceste relaţii pun în evidenţă următoarele proprietăţi ale distribuţiei de viteze a rigidului în mişcare plan-paralelă:
Or
z1
ω
x1
y1 O1
x
y
ε
O
θ
θ
z
[P]
[P1]

MECANICĂ*N* NC.04.Mişcări particulare ale rigidului
- 70 -
1) Toate punctele rigidului au viteze cuprinse în plane paralele cu planul fix (deoarece vz=0).
2) Distribuţia de viteze specifică acestei mişcări se poate considera ca rezultând din suprapunerea unui câmp de viteze caracteristic unei translaţii, peste un câmp de viteze caracteristic rotaţiei în jurul unei axe perpendiculare pe planul în care a avut loc translaţia.
3) Pentru a vedea dacă există puncte de viteză nulă se anulează relaţiile (4.32), pentru un punct ale cărui coordonate sunt (ξ ,η ,ζ) respectiv,
,00
=+=−
ξωηω
Oy
Oxvv
(4.33)
rezultând:
.,, arbitrarvv OxOy ==−= ζω
ηω
ξ (4.34)
Relaţiile (4.34) sunt ecuaţiile unei drepte, paralelă cu axa Oz, ceea ce arată că există o infinitate de puncte ale rigidului în mişcare plan-paralelă care au viteză nulă, respectiv punctele acestei drepte. Ea se numeşte axă instantanee de rotaţie. Intersecţia acesteia cu planul mobil Oxy este punctul de viteză nulă numit centru instantaneu de rotaţie şi este notat cu I.
O observaţie importantă ce trebuie făcută este că atât axa cât şi centrul instantaneu de rotaţie nu sunt fixe ci mobile.
Centrul instantaneu de rotaţie are o serie de proprietăţi deosebite, şi anume:
1) Distribuţia de viteze la un moment dat se obţine ca şi când corpul ar efectua o mişcare de rotaţie în jurul axei instantanee de rotaţie, cu originea în centrul instantaneu de rotaţie, cu viteza unghiulară ω .
Pentru a demonstra această proprietate foarte importantă, se consideră un punct M situat în planul mişcării al cărui vector de poziţie este:
.IMrrr IM +== (4.35)
Viteza punctului calculată cu formula lui Euler este:
( ) ,IMrvIMrvrvvv IOIOOM ×+×+=+×+=×+== ωωωω (4.36)
dar în care ,0==×+ IIO vrv ω (4.37)
astfel încât rezultă: ,IMvM ×= ω (4.38)
relaţie care arată că viteza punctului M se calculează, la un moment dat ca într-o rotaţie faţă de o axă cu originea în I.
De aici decurg o serie de consecinţe:
a) – I se află la intersecţia perpendicularelor pe suporturile vitezelor. Ca urmare, dacă se cunoaşte
complet viteza Av a punctului A al rigidului şi direcţia vitezei Bv a punctului B, se determină

MECANICĂ*N* NC.04.Mişcări particulare ale rigidului
- 71 -
poziţia centrului instantaneu de rotaţie (fig.4.9.,a), după care, ţinând seama de proprietatea enunţată, se află viteza unghiulară ω :
,IAvA=ω (4.39)
sensul ei fiind dat de sensul vitezei punctului A (fig.4.9.,a).
Ținând cont de aceste considerații şi cunoscând şi elementele geometrice IA şi IB, se poate afla mărimea vitezei punctului B cu relaţia: .IBvB ⋅= ω (4.40)
Fig. 4.9. Determinarea poziţiei centrului instantaneu de rotaţie (I)
b) – În cazul în care suporturile vitezelor celor două puncte sunt paralele (fig.4.9.,b), atunci I→∞ respectiv, IA→∞ şi deci ω =0. În consecinţă, distribuţia de viteze la momentul respectiv este aceeaşi ca într-o mişcare de translaţie, ceea ce face ca viteza punctului B să fie
.AB vv = (4.41)
c) – Dacă suporturile vitezelor celor două puncte sunt paralele, dar perpendicularele pe ele trec prin punctele A şi B , deci coincid (fig.4.9.,c), atunci pentru aflarea centrului instantaneu de rotaţie trebuie să se ştie mărimile ambelor viteze. Intersecţia dintre dreapta ce uneşte vârfurile acestora (conform “Teoremei coliniarităţii vârfurilor vitezelor”) şi perpendiculara pe suporturile lor, este centrul instantaneu de rotaţie I. Cunoscându-se acest punct se poate afla viteza unghiulară ω , cu relaţia (4.39) de exemplu, iar apoi viteza oricărui alt punct al rigidului, la momentul respectiv.
Concluzia este că la un moment dat normalele pe suporturile vitezelor punctelor situate în planul mişcării se intersectează în I.
Determinarea distribuţiei de viteze la rigidul în mişcare plan-paralelă, utilizând aceste proprietăţi şi consecinţe, se constituie practic într-o metodă numită metoda centrului instantaneu de rotaţie.
2) Deoarece axa instantanee de rotaţie şi respectiv punctul I sunt mobile, ele descriu locuri geometrice (fig.4.10.) faţă de cele două sisteme de referinţă, astfel:
a) – locul geometric al centrului instantaneu de rotaţie I faţă de sistemul de referinţă fix se numeşte centroidă fixă sau bază; el reprezintă intersecţia locului geometric al axei instantanee de rotaţie faţă de sistemul de referinţă fix, numit axoidă fixă, cu planul mişcării;
Av
Bv Av
A Av
I Bv
A A
B B B I→ ∞
I ω
Bv
ω
a) b) c)

MECANICĂ*N* NC.04.Mişcări particulare ale rigidului
- 72 -
b) – locul geometric al centrului instantaneu de rotaţie I faţă de sistemul de referinţă mobil se numeşte centroidă mobilă sau rostogolitoare; el reprezintă intersecţia locului geometric al axei instantanee de rotaţie faţă de sistemul de referinţă mobil, numit axoidă mobilă, cu planul mişcării.
Fig. 4.10. Axoidele fixă şi respectiv mobilă şi centroidele fixă, respectiv mobilă
Cele două axoide, respectiv centroide, au la rândul lor următoarele proprietăţi:
- sunt în permanenţă tangente de-a lungul axei instantanee de rotație, respectiv în I ; - axoida mobilă, respectiv rostogolitoarea, se rostogoleşte fără alunecare peste axoida fixă,
respectiv bază.
Fig. 4.11. Viteza unui punct B faţă de cea a unui punct A aparţinând unui corp în mișcare plan paralelă
Se poate face şi un studiu vectorial al vitezelor pentru mişcarea plan-paralelă. Pentru aceasta se consideră două puncte A şi B care aparţin planului mişcării Oxy (fig.4.11.). Cu ajutorul formulei lui Euler se scriu expresiile vitezelor acestor puncte, astfel:
,OAvv OA ×+= ω (4.42)
.OBvv OB ×+= ω (4.43)
Se scad membru cu membru cele două relaţii şi rezultă:
x1
O1 y1
z1 z
y
x
O
_ rO _
r1 _ r I
Centroida fixa
Centroida mobila
Axoida mobila
Axoida fixa
BAv
Av Bv
z
ω
x
y O
[P]
Av
A
B

MECANICĂ*N* NC.04.Mişcări particulare ale rigidului
- 73 -
( ) ,OAOBvv AB −×=− ω (4.44)
sau .ABvv AB ×+= ω (4.45)
Ţinând cont de expresia vitezei unui punct oarecare al unui rigid în mişcare de rotaţie, (4.7), se poate spune că
,BAvAB =×ω (4.46)
și reprezintă viteza punctului B calculată ca şi când punctul A ar fi fix, iar B s-ar roti faţă de el cu
viteza unghiulară ω . Se obţine expresia:
.BAAB vvv += (4.47)
Această relaţie stă la baza determinării distribuţiei de viteze prin metoda planului vitezelor, care este o metodă grafo-analitică ce constă în următoarele:
- se reprezintă vitezele la o anumită scară (scara vitezelor) într-un plan arbitrar ales, numit planul vitezelor; - punctul de viteză nulă din acest plan se numeşte polul vitezelor şi corespunde lui I, centrul instantaneu de rotaţie; - în planul vitezelor se reprezintă ecuaţii vectoriale de tipul (4.47), care se rezolvă pe cale grafică, ştiind că în plan, ecuaţiile vectoriale sunt echivalente cu două ecuaţii scalare; astfel, se determină două caracteristici necunoscute ale vectorilor (de regulă sensul şi modulul); - metoda utilizează teorema asemănării, al cărei enunţ este următorul: figurile obţinute în planul vitezelor prin unirea extremităţilor vectorilor viteză ai unor puncte date, sunt asemenea şi rotite cu π/2 în sensul lui ω faţă de figurile obţinute prin unirea punctelor corespunzătoare din figura plană considerată.
Metoda planului vitezelor de determinare a distribuţiei de viteze este folosită în mod deosebit la problemele în care se studiază mişcarea sistemelor de bare articulate.
Distribuţia de acceleraţii. Proprietăţi
Distribuţia de acceleraţii la rigid în mișcare plan-paralelă se determină plecând de la formula lui Rivals pentru acceleraţii
( ) ,rraa O ××+×+= ωωε
în care se introduc relaţiile (4.29), (4.30) şi (4.31). După efectuarea calculelor se obțin proiecţiile pe axe ale acceleraţiei unui punct oarecare al unui rigid în mişcare plan-paralelă:
.0
2
2
=−+=−−=
z
Oyy
Oxx
ayxaaxyaaωεωε
(4.48)
Proprietăţile distribuţiei de acceleraţii sunt asemănătoare celor ale distribuţie de viteze şi anume:
1) Toate punctele rigidului au acceleraţii cuprinse în plane paralele cu planul fix (deoarece az=0).

MECANICĂ*N* NC.04.Mişcări particulare ale rigidului
- 74 -
2) Distribuţia de acceleraţii specifică acestei mişcări se poate considera ca rezultând din suprapunerea unui câmp de acceleraţii dintr-o mişcare de translaţie, peste un câmp de acceleraţii dintr-o mişcare de rotaţie.
3) Punându-se problema existenţei punctelor de acceleraţie zero se anulează relaţiile (4.87) pentru un punct de coordonate (ξ’ ,η’ ,ζ’):
,00
2
2
=′−′+=′−′−
ωηεξωξεη
Oy
Oxaa
(4.49)
de unde se obţin valorile acestora,
.,, 42
2
42
2arbitrar
aaaa OxOyOyOx =′+
+=′
+
−=′ ζ
ωε
εωη
ωε
εωξ (4.50)
Relaţiile (4.50) reprezintă ecuaţiile unei axe ale cărei puncte au acceleraţie nulă. Intersecţia acesteia cu planul mobil Oxy este un punct de acceleraţie nulă numit centrul (polul) acceleraţiilor care se notează cu J.
O observaţie importantă este aceea că în general centrul instantaneu de rotaţie şi centrul
acceleraţiilor sunt două puncte diferite, deci I ≠ J .
Proprietatea remarcabilă a acestui punct este că distribuţia de acceleraţii la un moment dat se obţine ca şi când corpul s-ar roti, cu viteza unghiulară ω şi acceleraţia unghiulară ε , în jurul unei axe perpendiculare pe planul fix şi care trece prin centrul acceleraţiilor J.
Demonstraţia acestei proprietăţi se face (ca şi la studiul vitezelor) luând în considerare un punct M situat în planul mişcării al cărui vector de poziţie se poate scrie sub forma:
.JMrrr JM +== (4.51)
Expresia acceleraţiei punctului calculată cu formula lui Rivals este
( ) ( ) ( )[ ]
( ) ( ) .JMJMrra
JMrJMrarraaa
JJO
JJOOM
××+×+××+×+=
=+××++×+=××+×+==
ωωεωωε
ωωεωωε (4.52)
Dar cum
( ) ,0==××+×+ JJJO arra ωωε (4.53)
se obţine expresia:
( ) .JMJMaaM ××+×== ωωε (4.54)
Această relaţie arată că acceleraţia punctului M se calculează, la un moment dat ca într-o rotaţie faţă
de o axă cu originea în J, JM×ε fiind componenta tangenţială a acceleraţiei, iar ( )JM×× ωω , componenta ei normală.
Această proprietate stă la baza unei metode de determinare a distribuţiei de acceleraţii la rigidul în mişcare plan-paralelă, la un moment dat, cunoscută sub numele de metoda centrului acceleraţiilor.

MECANICĂ*N* NC.04.Mişcări particulare ale rigidului
- 75 -
Fig. 4.12. Determinarea acceleraţiei unui punct folosind metoda centrului acceleraţiilor (J)
Pentru aflarea acceleraţiei unui punct oarecare M al rigidului trebuie să se cunoască acceleraţia unui punct A, complet, precum şi viteza şi acceleraţia unghiulară, ω şi ε (fig.4.12.).
Poziţia centrului acceleraţiilor J se determină scriind, conform proprietăţii enunţate, acceleraţia
punctului A, după cum urmează:
,ντAAA aaa += (4.55)
unde ,2 JAaJAa
A
A⋅=
⋅=ωε
ν
τ (4.56)
ceea ce duce la:
.42 ωε +== JAaa AA (4.57)
De aici rezultă distanţa de la punctul A la centrul acceleraţiilor:
.42 ωε +
= AaJA (4.58)
Totodată, cu ajutorul relaţiilor (4.56) se poate determina unghiul φ dintre direcţia acceleraţiei punctului A şi direcţia JA, dat de:
tg φ 2ω
εν
τ==
A
A
a
a. (4.59)
Se roteşte apoi direcţia acceleraţiei lui A cu unghiul φ în sensul lui ε , obţinându-se direcţia pe care se găseşte centrul acceleraţiilor. Pe aceasta, se determină poziţia punctului J, la distanţa dată de relaţia (4.58), astfel încât acceleraţia normală a lui A să fie orientată către J.
Cunoscându-se poziţia centrului acceleraţiilor se poate afla acceleraţia oricărui alt punct al rigidului. De exemplu, pentru punctul M din figura 4.12., se folosesc relaţii analoge cu (4.55,...,4.57), astfel:
,ντMMM aaa += (4.60)
unde ,, 2 JMaJMa MM ⋅=⋅= ωε ντ (4.61)
φ
ω Ma
νMa Aa
τAa
τMa
νAa
ε
J
A M
φ

MECANICĂ*N* NC.04.Mişcări particulare ale rigidului
- 76 -
şi deci, .42 ωε +== JMaa MM (4.62)
Ca şi la viteze, se poate face şi un studiu vectorial al acceleraţiilor pentru mişcarea plan-paralelă. Astfel, se consideră două puncte A şi B care aparţin planului mişcării Oxy (fig.4.13.). Cu ajutorul formulei lui Rivals pentru distribuţia de acceleraţii, se scriu expresiile accelerațiilor corespunzătoare
acestor puncte. În prealabil, se face observaţia că dublul produs vectorial, ( )r×× ωω , poate fi scris sub forma:
( ) ( ) ( ) ( ) .2rrrrr ωωωωωωωωω −⋅⋅=⋅⋅−⋅⋅=×× (4.63)
Deoarece Oxyr ⊂ , pentru punctele A şi B, respectiv vectorii OA și OB , iar ω ⊥ Oxy, rezultă că ( ) ,0=⋅⋅ ωω r (4.64)
şi în consecinţă
( ) .2rr ωωω −=×× (4.65)
În aceste condiţii, acceleraţiile punctelor A şi B sunt:
,2 OAOAaa OA ⋅−×+= ωε (4.66)
.2 OBOBaa OB ⋅−×+= ωε (4.67)
Fig. 4.13. Acceleraţia unui punct B faţă de cea a unui punct A aparţinând unui corp în mișcare plan-paralelă
Expresia (4.66), se scade din expresia (4.67) şi în mod analog cu ceea ce s-a obţinut la studiul vitezelor, rezultă:
,2 ABABaa AB ⋅−×+= ωε (4.68)
în care se pun în evidenţă cele două componente
ν
τ
ω
ε
BA
BA
aAB
aAB
=⋅−
=×2
(4.69)
ale acceleraţiei punctului B, calculată ca şi când punctul A ar fi fix, iar B s-ar roti faţă de el cu viteza unghiulară ω şi acceleraţia unghiulară ε .
Ba
ε
νBAa
BAa Aa
Aa τBAa
z
ω
x
y O [P] A
B

MECANICĂ*N* NC.04.Mişcări particulare ale rigidului
- 77 -
Se obţine astfel expresia:
,ντBABAAB aaaa ++= (4.70)
sau .BAAB aaa += (4.71)
Relaţiile (4.70) şi (4.71) stau la baza determinării distribuţiei de acceleraţii prin metoda planului acceleraţiilor, care este o metodă grafo-analitică şi ale cărei principii de aplicare sunt asemănătoare cu cele de la planul vitezelor. Teorema asemănării utilizată în cadrul acestei metode are următorul enunţ: figurile obţinute în planul acceleraţiilor prin unirea extremităţilor vectorilor acceleraţie ai
unor puncte date, sunt asemenea şi rotite cu π-ϕ în sensul lui ε faţă de figurile obţinute prin unirea
punctelor corespunzătoare din figura plană considerată, unde BA
BA
atga
τ
νϕ = .
Această metodă de determinare a distribuţiei de acceleraţii este folosită în mod deosebit, ca şi aceea de la viteze, în problemele în care se studiază mişcarea sistemelor de bare articulate.
NC.04.5. Aplicaţii
Fig. 4.14. O bară aluneca pe două suprafeţe (a), baza şi rostogolitoarea (b), acceleraţiile (c)
C
O1 x1
y1
θ ω
A≡O
B I
b)
y
x
N
θ
Baza
Rostogolitoarea θ
ω
A
B I
M
vA=u=const.
vB
vM
a) νBa
νBa θ
ω
A≡J
B I
M
aB
aM
c) ε

MECANICĂ*N* NC.04.Mişcări particulare ale rigidului
- 78 -
1. Se dă o bară AB de lungime AB=2l. Capetele ei alunecă de-a lungul unui perete vertical şi a unuia orizontal, punctul A având viteza vA = u = constant. Poziţia instantanee a barei este descrisă de θ=θ(t) (fig.4.14.,a).
Se cere să se determine: 1) distribuţia de viteze; 2) baza şi rostogolitoarea; 3)distribuţia de acceleraţii.
Rezolvare
1) A determina distribuţia de viteze înseamnă a obţine viteza punctului B, precum şi a unui punct arbitrar M al barei.
Pentru aceasta, se caută centrul instantaneu de rotaţie. Cum punctele A şi B au mişcare rectilinie de-a lungul celor doi pereţi, înseamnă că suporturile vitezelor lor au aceste direcţii, iar centrul instantaneu de rotaţie I se află la intersecţia perpendicularelor ridicate în cele două puncte pe cei doi pereţi (fig.4.14.,a). Odată determinat I, cunoscându-se viteza vA ,se calculează viteza unghiulară a barei,
.cos2
constl
uIAvA ≠==
θω
al cărei sens este dat de sensul vitezei punctului A. Pentru punctul B viteza este
⋅==⋅= ull
uIBvB θθ
ω sin2cos2
tgθ ,IB⊥→
deci are direcția de-a lungul peretelui vertical şi este orientată în jos (fig.4.14.,a).
Viteza punctului M este
,IMIMvM ⊥→⋅= ω
iar sensul ei este dat de ω. În cazul reprezentării la o aceeaşi scară a vitezelor celor trei puncte, vârfurile lor sunt colineare (fig.4.14.,a).
2) Baza şi rostogolitoarea se determină analitic. Pentru aceasta se alege sistemul de referință fix cu axele de-a lungul celor doi pereţi, iar sistemul de referință mobil cu originea în punctul A, O ≡ A, axa Ox perpendiculară pe bară, iar axa Oy în lungul barei (fig. 4.14.,b). Se scriu coordonatele punctului I faţă de cele două sisteme de referinţă, iar apoi, eliminându-se parametrul θ se obţin ecuaţiile celor două centroide căutate.
Rezultă:
- pentru bază : ( ) ,2cos2sin2 22
121
1
1
11
11 lyxlylx
BOyAOx
=+⇒
==
⇔==
θθ
care este ecuaţia unui cerc cu centrul în O1 şi de rază 2l (fig.4.14.,b);

MECANICĂ*N* NC.04.Mişcări particulare ale rigidului
- 79 -
- pentru rostogolitoare: ( ) ,)2cos1(
2sin 222 llyxlylx
ANyINx
=−+⇒
+==
⇔==
θθ
care este ecuaţia unui cerc cu centrul în centrul de masă al barei, C, şi de rază l (fig.4.14,b);
3) Determinarea distribuţiei de acceleraţii presupune aflarea centrului acceleraţiilor, J. Deoarece punctul A al barei are mişcare rectilinie, acceleraţia lui este dată de relaţia:
,0=== uva AA
de unde rezultă că centrul acceleraţiilor este chiar în acest punct , deci A ≡ J. Pentru a putea afla acceleraţiile punctelor B şi M se determină acceleraţia unghiulară ε, prin derivarea vitezei unghiulare ω. Rezultă:
.cos4sin
cos2sin
32
2
2 θθθ
θθωε
lu
lu
=⋅
==
Se observă că deoarece prin derivare nu se obţine o mărime cu semn schimbat, sensul lui ε este acelaşi cu cel al lui ω (fig.4.14.,c).
Acceleraţia punctului B se calculează ca într-o mişcare circulară faţă de J, respectiv:
( ) ( ) .cos2
cos2
cos2sin
3
222
2
22
3
2
θθ
ω
θθε
ντ
ν
τντ
luaaa
luJBa
luJBa
undeaaa BBB
B
BBBB =+=⇒
==
=⋅⋅=+=
Se mai calculează tangenta unghiului dintre direcţia acceleraţiei şi direcţia componentei ei normale, obţinându-se
tg φ ====θθ
ωε
ν
τ
cossin
2B
Baa tg θ .θϕ =⇒
Acest rezultat arată că acceleraţia punctului B este dirijată de-a lungul peretelui vertical, lucru ce era de aşteptat deoarece mişcarea acestui punct este rectilinie (fig.4.14.,c).
Ţinând seama de proprietăţile distribuţiei de acceleraţii la rigidul în mişcare de rotaţie, se poate spune că toate punctele barei AB au acceleraţiile înclinate cu acelaşi unghi φ=θ faţă de direcţia barei, deci sunt toate verticale. Totodată, vârfurile acceleraţiilor sunt colineare iar linia care le uneşte trece prin J. Se obţine astfel pe cale grafică acceleraţia oricărui punct al barei, mărimea ei determinându-se prin asemănare, conform figurii 4.14.,c, după cum urmează:
.ABAMaa
ABAM
aa
BMB
M =⇒=
2. Se dă un disc plan de rază R care se rostogoleşte fără alunecare pe un plan orizontal (fig.4.15.,a). Ştiind că viteza centrului său C, este vC = vO = constant, se cere să se determine: 1) centrul instantaneu de rotaţie I, viteza unghiulară ω a roţii, vitezele punctelor A şi B reprezentate în figura

MECANICĂ*N* NC.04.Mişcări particulare ale rigidului
- 80 -
4.15.,a; 2) centrul acceleraţiilor J, acceleraţia unghiulară ε a roţii, acceleraţiile punctelor A şi B; 3)să se precizeze care sunt în acest caz baza şi rostogolitoarea.
Fig. 4.15 Disc în mişcare de rostogolire fără alunecare (a), vitezele (b) şi acceleraţiile (c)
Rezolvare
1) Deoarece discul are o mişcare de rostogolire fără alunecare pe plan, centrul instantaneu de rotaţie I se află la punctul de contact dintre cele două corpuri (fig.4.15.,b). Viteza unghiulară ω se determină cu o relaţie de tipul (4.39), astfel:
,constR
vICv OC ===ω
şi are sensul corespunzător sensului vitezei punctului C.
Ştiindu-se ω, conform celor arătate în paragrafele anterioare, se calculează vitezele punctelor A şi B ca şi când acestea ar avea o mişcare circulară în jurul lui I, cu această viteză unghiulară; rezultă:
.22
,22
IBvRR
vIBv
IAvRR
vIAv
OO
B
OO
A
⊥→==⋅=
⊥→==⋅=
ω
ω
Ambele viteze au sensurile date de ω (fig.4.15.,b). Se poate face observaţia că viteza punctului A se putea determina şi pe baza proprietăţii de coliniaritate a vârfurilor vitezelor punctelor colineare.
2) În ceea ce priveşte acceleraţiile se observă că punctul C are o mişcare rectilinie şi uniformă. Ca urmare, acceleraţia lui este:
.0=== OCC vva
Aceasta arată că centrul acceleraţiilor se află chiar în C, respectiv C ≡ J (fig.4.15.,c). Se constată că I ≠ J. Acceleraţia unghiulară este
,0==ωε
deoarece viteza unghiulară obţinută era constantă. În consecinţă acceleraţiile punctelor care aparţin discului au numai componenta normală. Deoarece punctele A, B şi chiar I sunt situate pe periferia discului, distanţele faţă de J sunt: JA=JB=JI=R. Se obţin:
Ia
Ba
A
B C
I
vO R
A
B C
A
B C≡J
vA
vB
ω
a) b) c)
vO
I
ω
ε=0 Aa

MECANICĂ*N* NC.04.Mişcări particulare ale rigidului
- 81 -
,22
22
IBOO
A aaRvRRvJAa ====⋅=ω
şi sunt orientate către centrul discului (fig.4.15.,c).
3) În acest caz, datorită faptului că discul se rostogoleşte fără alunecare pe plan, baza este chiar suprafața planului, respectiv în vederea din planul vertical o dreaptă, iar rostogolitoarea este periferia discului, respectiv un cerc.
NC.04.6. Mișcarea rigidului cu punct fix
Dacă în timpul mişcării un rigid are un punct fix, atunci este recomandat să se aleagă originile sistemelor de axe mobil și fix, chiar în punctul fix (fig. 4.16.). În aceste condiţii rezultă pentru viteza originii 0Ov = , iar vectorul viteză unghiulară ω este un vector arbitrar, care se poate proiecta pe axele sistemului de axe mobil:
x y zi j kω ω ω ω= + + . (0.72)
Formula lui Euler pentru viteza unui punct oarecare al rigidului în acest caz se scrie:
( ) ( ) ( )x y z y z z x x y
i j kv r z y i x z j y x k
x y z
ω ω ω ω ω ω ω ω ω ω= × = = − + − + − (0.73)
Fig. 4.16. Poziționarea rigidului cu punct fix. Conurile polodic și herpolodic.
Proiecţiile vitezei v pe axele reperului legat de rigid sunt:
x y z
y z x
z x y
v z x
v x z
v y x
ω ω
ω ω
ω ω
= −
= −
= −
. (0.74)
x1
O≡O1
y1
z1
x
y
z
Conul herpolodic
Conul polodic
ω

MECANICĂ*N* NC.04.Mişcări particulare ale rigidului
- 82 -
Cum viteza punctului O ales ca origine este evident nulă, se pune problema dacă mai sunt și alte puncte ale rigidului, care în timpul mişcării au tot viteza nulă. Coordonatele acestor puncte trebuie să verifice sistemul algebric următor:
0
00
y z
z x
x y
z y
x zy x
ω ω
ω ωω ω
− =
− =
− =
. (0.75)
Din acest sistem omogen rezultă proprietatea:
x y z
x y zω ω ω
= = . (0.76)
Această relaţie reprezintă ecuaţia unei drepte care trece prin originea O și care are direcţia instantanee a vectorului viteză unghiulară ω . Aceasta se numeşte axa instantanee de rotaţie. Distribuţia de viteze este identică celei de la mişcarea de rotaţie a unui rigid cu axă fixă, care ar avea loc la un moment dat în jurul axei instantanee de rotaţie, de unde și numele acestei drepte. Trebuie remarcat că rigidul nu se roteşte în jurul acestei axe, care este o axa cu orientare variabilă în timp. Locul geometric al axei instantanee de rotaţie în raport cu sistemul de axe mobil este un con de formă generală, numit conul polodic. Pe de altă parte, locul geometric al axei instantanee de rotaţie în raport cu sistemul de axe fix este un alt con, numit conul herpolodic.
Evident, cele două conuri au o generatoare comună care este chiar axa instantanee de rotaţie. Se poate demonstra că cele două conuri sunt tangente şi conul polodic se rostogoleşte peste conul herpolodic.
Dacă se notează ξ1, η1, ζ1 coordonatele unui punct P arbitrar de pe axa instantanee de rotaţie în raport cu sistemul de axe fix O1x1y1z1 şi ξ, η, ζ coordonatele aceluiaşi punct P în raport cu sistemul de axe mobil Oxyz, atunci următoarea relaţie este evidentă: 1 11 1 11i j k i j kξ η ζ ξ η ζ+ + = ⋅ + ⋅ + ⋅ . (0.77)
Prin derivarea în raport cu timpul a acestei relaţii, se obţine:
1 11 1 11i j k i j k i j kξ η ζ ξ η ζ ξ η ζ⋅ + ⋅ + ⋅ = ⋅ + ⋅ + ⋅ + ⋅ + ⋅ + ⋅ . (0.78)
Cum însă 0i j k rξ η ζ ω⋅ + ⋅ + ⋅ = × = , deoarece punctul P aparţine axei instantanee de rotaţie, rezultă:
1 11 1 11i j k i j kξ η ζ ξ η ζ⋅ + ⋅ + ⋅ = ⋅ + ⋅ + ⋅ . (0.79)
Partea stângă a expresiei precedente exprimă viteza punctului P faţă de sistemul fix, iar partea dreaptă reprezintă viteza aceluiaşi punct în raport cu sistemul de axe mobil. Cele două viteze sunt perpendiculare pe axa instantanee de rotaţie OP şi în plus modulele vectorilor de poziție sunt
identice: 2 2 2 2 2 21 1 1 .constξ η ζ ξ η ζ+ + = + + = Prin derivarea acestei ultime condiţii rezultă:
1 1 1 1 1 1 0ξ ξ η η ζ ζ ξξ ηη ζζ+ + = + + = . (0.80)

MECANICĂ*N* NC.04.Mişcări particulare ale rigidului
- 83 -
Această relaţie poate fi interpretată ca un produs scalar între relaţiile (4.77) și (4.79), ceea ce demonstrează afirmaţia de mai sus.
Rezultă din acestea că cele două conuri au în P acelaşi plan tangent şi conul polodic se rostogoleşte pe conul herpolodic în jurul axei instantanee OP, deoarece planul tangent într-un punct P al conului este determinat de generatoarea care include punctul P şi o dreaptă perpendiculară pe generatoare și tangenta la con. Dreapta menţionată este în acest caz tangenta comună la curbele descrise de punctul P în mişcarea sa pe cele două conuri. Arcele elementare descrise pe aceste două curbe sunt la rândul lor egale întrucât cele două viteze sunt egale.
În privinţa acceleraţiilor, formula lui Rivals se poate scrie:
2
2 2 2
( ) ( )
( )( ) ( )( )
x y z
x y z x y z x y z
i j ka r r r r r
x y z
x y z i j k xi y j zk
ε ω ω ε ω ω ω ε ε ε
ω ω ω ω ω ω ω ω ω
= × + × × = × + ⋅ − =
+ + + + + − + + + +
. (0.81)
Proiecţiile acceleraţiei a pe axele reperului mobil sunt prin urmare:
2 2
2 2
2 2
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
x y z x y z x z y
y z x y z x y x z
z x y z x y z y x
a x y z
a y z x
a z x y
ω ω ω ω ε ω ω ε
ω ω ω ω ε ω ω ε
ω ω ω ω ε ω ω ε
= − + + − + +
= − + + − + +
= − + + − + +
. (0.82)
Desigur că acceleraţia originii, obţinută prin înlocuirea coordonatelor sale în relaţiile precedente, este nulă. Se pune problema dacă mai există alte puncte cu acceleraţie nulă în timpul mişcării. Coordonatele acestor puncte ar trebui să verifice următorul sistem de ecuaţii algebrice:
2 2
2 2
2 2
( ) ( ) ( ) 0
( ) ( ) ( ) 0
( ) ( ) ( ) 0
y z x y z x z y
z x y z x y x z
x y z x y z y x
x y z
y z x
z x y
ω ω ω ω ε ω ω ε
ω ω ω ω ε ω ω ε
ω ω ω ω ε ω ω ε
− + + − + + =
− + + − + + =
− + + − + + =
, (0.83)
sau sub forma matriceală
2 2
2 2
2 2
( ) 0( ) 0
0( )
y z x y z x z y
y x z z x y z x
z x y z y x x y
xyz
ω ω ω ω ε ω ω ε
ω ω ε ω ω ω ω ε
ω ω ε ω ω ε ω ω
− + − + + − + − = − + − +
. (0.84)
Acest sistem este liniar și omogen. Determinantul său se poate arăta că este:

MECANICĂ*N* NC.04.Mişcări particulare ale rigidului
- 84 -
( ) ( ) ( )
2
2
2
x y z
x y z
y z z y z x x z x y y x
i j k
i j k
ω ε ω ω ω
ε ε ε
ω ε ω ε ω ε ω ε ω ε ω ε
∆ = − × = −
= − − + − + −
. (0.85)
Întrucât ω și ε nu sunt ambele nule, determinatul Δ≠0 și prin urmare nu mai există alte puncte cu acceleraţie nulă în afara originii.
Se poate spune prin urmare că distribuţia de acceleraţii pentru mişcarea unui rigid cu punct fix nu este reductibilă la cea a unui corp aflat în rotaţie în jurul unei axe fixe, ci este o distribuţie specifică acestui caz.
Exemplu.
Un con circular drept având înălţimea H și raza bazei R, se rostogoleşte fără alunecare pe un plan orizontal, astfel încât vârful său rămâne fix în punctul O. Dacă centrul bazei are o viteză v constantă și permanent paralelă cu planul orizontal, se cer viteza unghiulară a conului, conul polodic și cel herpolodic (fig. 4.17.)
Rezolvare
Se consideră referenţialul mobil Oxyz cu axa Oz prin centrul bazei conului. Fie semi-unghiul
conului dat prin relaţia tan RH
α = . La momentul iniţial se poate considera axa Ox în planul vertical
şi axa Oy în planul orizontal în sens opus axei Oy1. În acest referenţial, centrul C al cercului de bază are vectorul de poziție r Hk= . Condiţia de rostogolire fără alunecare pe planul orizontal face ca viteza punctelor de pe generatoarea OI să fie nulă.
Fig. 4.17. Un con cu punct fix care se rostogoleşte pe un plan
y
O≡O1
z
z1
y1
x1
_ v
x
C
axa instantanee de rotatie
I
z x
I O _ ω
α
conul polodic
t=0

MECANICĂ*N* NC.04.Mişcări particulare ale rigidului
- 85 -
Prin acest raţionament s-a identificat axa instantanee de rotaţie, care este OI. La momentul iniţial viteza unghiulară are direcţia axei OI: ( )sin cosi kω ω α α= − + . Viteza punctului C se scrie:
sin 0 cos sin0 0
i j kv r H j
Hω ω α α ω α= × = − = − .
Rezultă pentru scalarul vitezei unghiulare sinv
Hω
α= . Este evident că rolul de axă instantanee de
rotaţie este preluat succesiv de generatoarele conului. În referenţialul mobil, rezultă pentru conul polodic un con cu două pânze cu originea în O și de semi-unghi α, din care conul studiat face parte. Aceste axe aparţin simultan planului orizontal, care joacă prin urmare rolul conului herpolodic, care degenerează în plan în acest caz.
NC.04.7. Mișcarea generală a unui rigid
Formula lui Euler pentru viteza originii Ov și respectiv ω arbitrari, devine:
( )
( ) ( )
O Ox Oy Oz x y z Ox y z
Oy z x Oz x y
i j kv v r v i v j v k v z y i
x y z
v x z j v y x k
ω ω ω ω ω ω
ω ω ω ω
= + × = + + + = + −
+ + − + + −
. (0.86)
Proiecţiile vitezei v a unui punct oarecare a unui rigid pe axele reperului mobil se scriu:
x Ox y z
y Oy z x
z Oz x y
v v z y
v v x z
v v y x
ω ω
ω ω
ω ω
= + −
= + −
= + −
. (0.87)
Se poate uşor arăta că distribuţia de viteze la orice moment de timp t este identică distribuţiei de viteze de la mişcarea elicoidală. Într-adevăr există puncte pentru care ||v ω , cele plasate pe o dreaptă de ecuaţie:
Ox y z Oy z x Oz x y
x y z
v z y v x z v y xω ω ω ω ω ωω ω ω
+ − + − + −= = . (0.88)
Această dreaptă se numeşte axa instantanee a mişcării elicoidale. Mişcarea generală a unui rigid poate fi imaginată ca o succesiune de mişcări elicoidale infinitezimale. Trebuie însă subliniat faptul că axa instantanee a mişcării elicoidale este mobilă. Locul său geometric în raport cu referenţialul fix este o suprafaţă rectificabilă numită axoidă fixă iar în raport cu referenţialul mobil este o alta suprafaţă rectificabilă, numită axoidă mobilă. Cele două axoide au o generatoare comună care este chiar axa instantanee a mişcării elicoidale. În timpul mişcării corpului, axoida mobilă se rostogoleşte peste axoida fixă, dar şi alunecă pe aceasta în lungul generatoarei comune instantanee.
Într-adevăr, dacă 1 1 1, ,ξ η ζ reprezintă coordonatele unui punct P care aparţine axei instantanee a mişcării elicoidale raportate la referenţialul fix şi , ,ξ η ζ coordonatele aceluiaşi punct în raport cu

MECANICĂ*N* NC.04.Mişcări particulare ale rigidului
- 86 -
referenţialul mobil, atunci următoarea relaţie între vectorii de poziție este valabilă pentru orice moment de timp:
11 1 1 1 1 Oi j k r i j kξ η ζ ξ η ζ+ + = + + + . (0.89)
Prin derivarea acestei relaţii în raport cu timpul, se obţine:
1 11 1 11 Oi j k v i j k i j kξ η ζ ξ η ζ ξ η ζ⋅ + ⋅ + ⋅ = + ⋅ + ⋅ + ⋅ + ⋅ + ⋅ + ⋅ . (0.90)
Dar
O Ov i j k v rξ η ζ ω λω+ ⋅ + ⋅ + ⋅ = + × =
deoarece punctul P se află pe axa instantanee a mişcării elicoidale, iar viteza acestuia este paralelă cu vectorul viteză unghiulară. Rezultă:
1 11 1 11i j k i j kξ η ζ ξ η ζ λω⋅ + ⋅ + ⋅ = ⋅ + ⋅ + ⋅ + . (0.91)
Din faptul că diferenţa dintre vectorii viteză ai punctului P în raport cu referenţialul fix și respectiv mobil, are direcţia vectorului viteză unghiulară ω , rezultă că axoida mobilă alunecă pe axoida fixă în lungul generatoarei comune şi concomitent se rostogoleşte pe axoida fixă în jurul acestei generatoare.
În privinţa acceleraţiei, formula lui Rivals devine în acest caz:
( )Oa a r rε ω ω= + × + × × , (0.92)
în care , ,Oa ω ε sunt vectori arbitrari. Distribuţia de acceleraţii pentru mişcarea generală a unui rigid este identică celei a unui rigid cu punct fix.
Într-adevăr, dacă vectoriiω si ε nu sunt simultan vectori nuli, atunci există un singur punct de acceleraţie nulă ( )Oa a r rε ω ω= + × + × × la un moment dat. Coordonatele acestui punct sunt
date de rezolvarea următorului sistem neomogen de ecuaţii algebrice:
2 2
2 2
2 2
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
y z x y z x z y Ox
z x y z x y x z Oy
x y z x y z y x Oz
x y z a
y z x a
z x y a
ω ω ω ω ε ω ω ε
ω ω ω ω ε ω ω ε
ω ω ω ω ε ω ω ε
− + + − + + = −
− + + − + + = −
− + + − + + = −
. (0.93)
Deoarece în general determinatul acestui sistem nu este nul: 2
0ω ε ∆ = − × ≠ , Rezultă că
sistemul de ecuaţii algebrice are o soluţie unică.

MECANICĂ*N* NC.05. Studiul cinematic al mişcării relative a punctului material
‐ 87 ‐
Capitolul NC.05. Studiul cinematic al mişcării relative a punctului material
Cuvinte-cheie Mişcare absolută, Mişcare relativă, Sistem de referinţă mobil, Sistem de referinţă fix, Vector coloană, Unghiuri Euler, Ecuaţia vectorială, Legea de compunere a vitezelor,
Viteza absolută, Viteza relativă, Viteză de transport, Legea de compunere a acceleraţiilor, Acceleraţia absolută, Acceleraţia relativă, Acceleraţia de transport, Acceleraţia Coriolis
Consideraţii generale
Mişcarea unui sistem material (punct material, sistem discret de puncte materiale, corpuri) în raport cu un sistem de referinţă fix, poartă denumirea de mişcare absolută, în timp ce mişcarea sistemului material în raport cu sistemul de referinţă mobil poartă denumirea de mişcare relativă. Prezentul capitol conţine o primă parte esenţială ce urmărște studiul cinematic al mişcării relative a punctului material, prin studiul geometric şi respectiv prin legea de compunere a vitezelor şi acceleraţiilor.
NC.05.1. Studiul geometric şi cinematic
Spre deosebire de capitolele consacrate mişcării absolute a punctului material, există o serie de aplicaţii în care problema centrală este studiul mişcării sistemelor materiale în raport cu un sistem de referinţă mobil. Acest studiu constă în determinarea traiectoriei, vitezei şi acceleraţiei ce exprimă mişcarea absolută a punctului material, fiind cunoscuţi în acest sens parametrii cinematici ce exprimă mişcarea punctului material faţă de un sistem de referinţă mobil, precum şi parametrii cinematici ai mişcării absolute a sistemului de referinţă mobil. Pentru a studia mişcarea relativă, în
fig. 5.1. se reprezintă un sistem de referinţă fix, notat 0 0 0 0O x y z sau 0 şi un sistem de referinţă
mobil simbolizat Oxyz sau S , cu originea într-un punct oarecare O , din spaţiu, la care se adăugă
sistemul cu originea în acelaşi punct O , care însă îşi păstrează orientarea constantă cu a sistemului de
referinţă fix, simbolizat 0 0 0Ox y z . În aceeaşi figură, este reprezentat un punct material M a cărui
mişcare va constitui obiectivul central al acestui studiu.
Pentru început, se realizează un studiu geometric al sistemului mecanic reprezentat în fig. 5.1.
Conform aspectelor din capitolul NB.03., sistemul de referinţă S prezintă, în cazul general, şase
parametri independenţi de poziţie şi orientare, fiecare dintre ei fiind funcţii de singura variabilă
independentă, care este parametrul timp. Aceşti parametri sunt incluşi în simbolul X t , care în
algebra matriceală reprezintă un vector coloană de dimensiuni 6 1 , scris matriceal, astfel:
0 0 0 0T
T
r t x t y t z tX t
t t t t
(5.1)
unde reprezintă unghiul de precesie, unghiul de nutaţie, iar unghiul de rotaţie proprie, adică
setul de unghiuri Euler, care este inclus în simbolul t având în algebra matriceală semnificaţia
unui vector coloană 3 1 , numit în acest capitol vector de orientare (vezi capitolul NB.03.).
Astfel, prin funcţia vectorială 0 0r r t , se remarcă ecuaţiile care exprimă mişcarea de translaţie
rezultantă a sistemului de referinţă mobil, respectiv prin vectorul de orientare t , ecuaţiile

MECANICĂ*N* NC.05. Studiul cinematic al mişcării relative a punctului material
‐ 88 ‐
parametrice care exprimă mişcarea de rotaţie rezultantă a aceluiaşi sistem de referinţă mobil. Conform aceluiaşi capitol NB.03., s-a introdus matricea de rotaţie rezultantă, ale cărei cosinusuri directoare sunt funcţii în exclusivitate de setul de unghiuri Euler, aşa cum se poate observa şi din expresia (3.54), rescrisă sub forma următoare:
0; ; ;s R R R z R x R z ,
s c s c c s c c c s s s
R c c s s c c c c s s c s
s s s c c
.
Fig. 5.1. Sistemele de referință pentru studiul mișcării relative a punctului material
Aşadar, sistemul de referinţă mobil S , supus analizei prezentului capitol, se află într-o mişcare
generală, caracterizată prin şase parametri independenţi, reprezentând ecuaţiile parametrice de mişcare, simbolizate prin expresiile conţinute în (5.1). Punctul material M , spre deosebire de
capitolele precedente, se află în mişcare atât faţă de sistemul de referinţă fix 0 , cât şi faţă de
sistemul de referinţă mobil S . Conform aceluiaşi capitol NB.03., se pot scrie următoarele ecuaţii
matriceale, ce exprimă transferul vectorului de poziţie OM , din sistemul de referinţă mobil,
simbolizat s sOM r , în sistemul de referinţă fixOM r , cu observaţia că atât r r t , cât şi
S Sr r t sunt funcţii vectoriale de parametrul timp:
x
y
z
0y
0zk
j
i
0k
N
0i
0i
0j
0j
0k
0x
0y0O
0rMr0z
0v
0a
0
0x
sr
M
S
av
aa
R O

MECANICĂ*N* NC.05. Studiul cinematic al mişcării relative a punctului material
‐ 89 ‐
0 ssr t R t r t . (5.2)
Astfel, s-a obţinut ecuaţia vectorială cu proiecţie pe sistemul 0 , a traiectoriei mişcării relative a
punctului material M . Poziţia punctului material în raport cu sistemul de referinţă fix, este:
00 0
sM sr t r t r t r t R t r t (5.3)
Ţinând seama de semnificaţia expresiei (5.2), expresia (5.3), caracterizează ecuaţia vectorială a traiectoriei mişcării absolute a particulei materiale M . Spre deosebire de mişcarea absolută, evidenţiată prin relaţia (5.3), mişcarea de transport, inevitabilă în acest studiu cinematic, este evidenţiată prin ecuaţia vectorială a traiectoriei punctului material M , de forma:
00 0
sM sr t r t r t r t R t r (5.4)
Aşadar, mişcarea de transport caracterizează mişcarea particulei M , fără a lua în considerare mişcarea relativă, adică la momentul t se consideră, imaginar, că punctul M este solidar cu sistemul de referinţă mobil.
Sub aspectul cinematicii instantanee la momentul t , sistemul de referinţă mobil S se
caracterizează pe de o parte prin parametrii cinematic specifici translaţiei rezultante, iar pe de alta parte rotaţiei rezultante. Astfel, mişcarea de translaţie rezultantă, se caracterizează prin viteza şi acceleraţia originii sistemului de referinţă mobil, definite prin expresiile:
0 0 0 0 0 0 0 0 0 0 0;T Tv r x y z a v r x y z
(5.5)
Mişcarea de rotaţie rezultantă, este evidenţiată prin vectorul viteză şi acceleraţie unghiulară. De aceea, în cele ce urmează se vor defini expresiile acestor parametri cinematici.
NC.05.2. Definirea vectorului viteză şi acceleraţie unghiulară
În fig.5.2, se ia în studiu un punct material M, aflat
în mişcare pe o traiectorie circulară de rază OM , cu
centrul în punctul O şi situată în planul
0 0z z O M c cst , unde este unghiul dintre
raza vectoare 0O M şi axa mişcării de rotaţie. La
momentul iniţial, mobilul se află în poziţia
0,M definită prin vectorul 0 0r t . La momentul
t , punctul se află în poziţia M, caracterizată prin
0O M r t , iar la momentul t t în poziţia 1M ,
x
y
OM
1M
r
O R
NMr
R
M
k
0x
x
y
0z z
O
tr
OO
0M
1M
s s
0tr ttr
0y
Fig.10.2

MECANICĂ*N* NC.05. Studiul cinematic al mişcării relative a punctului material
‐ 90 ‐
având raza vectoare ( )r t t r r , unde t este un timp elementar, finit, dar foarte mic. În
intervalul finit de timp 0, t punctul material M, descrie arcul de cerc 0M M s OM , iar raza
polară notată prin 0OM OM r s descrie unghiul la centru t . În intervalul de timp
,t t t mobilul descrie arcul elementar s , iar raza polară descrie unghiul elementar la centru
. În studiu, se consideră de asemenea, un sistem de referinţă mobil S , la care axa Ox este
legată de punctul M , iar axa Oz este coliniară cu 0Oz . Ca urmare, sistemul S , legat de mobilul
M execută o rotaţie în jurul acestei axe, conform cu:
0
, 0
0 0 1
c t s t
R z t s t c t
(5.6)
Ţinând seama de relaţia (5.6), proiecţia vectoruluiOM pe sistemul fix 0 se exprimă astfel:
( , )S
OM R z OM , (5.7)
unde 0 0S T
OM r s , iar 0 00 0 TO O z .
Înlocuind (5.6) şi (5.7), în expresia (5.3) rezultă:
0
00
0 0 0
0 0 1 0
xc s r s
r y s c
z z
. (5.8)
Dezvoltând expresia matriceală anterioară, rezultă ecuaţiile parametrice de mişcare ale mobilului M în coordonate carteziene:
0; ; .x r s c y r s s z z cst (5.9)
Observaţie: Din expresia (5.9), se observă că legea de mişcare a mobilului M pe o traiectorie circulară este dată prin ( )t , reprezentând variaţia în raport cu timpul a unghiului polar.
Luând în considerare triunghiul elementar 1OMM , (vezi fig. 5.2), se poate scrie r s , aşadar
coarda vectorială r este egală în aproximaţia liniară cu arcul elementar s . În conformitate
cu aspectele prezentate în capitolul NC.02., viteza unghiulară , reprezintă unghiul la centru, măturat de raza vectoare în unitatea de timp, adică:
( ) ( )
mt t t
t t t
, (5.10)
unde m şi reprezintă viteza unghiulară medie a vitezei unghiulare la un anumit moment t .
Valoarea exactă a vitezei unghiulare instantanee, corespunzătoare momentului t se obţine prin
trecerea la limită în relaţia (5.10), adică:

MECANICĂ*N* NC.05. Studiul cinematic al mişcării relative a punctului material
‐ 91 ‐
0
limt
dt dt
; (5.11)
unde reprezintă derivata absolută de ordinul întâi în raport cu timpul a funcţiei )(t .
Ca urmare, se poate scrie următoarea relaţie în triunghiul isoscel şi elementar 1OMM :
2 sin 2 s2 2
r OM OM
(5.12)
unde 0 sin sin sOM O M r r .
Funcţia trigonometrică de argument elementar din (5.12), se dezvoltă în serie Taylor, rezultând:
3 5
2 2sin s ...........2 2 2 3! 5!
(5.13)
În aproximaţia liniară, rezultă
sin
2 2, iar expresia (5.12) ia forma:
r r s . (5.14)
Relaţia anterioară, se divizează cu t şi se trece la limită, rezultând:
0 0
lim limt
rr s
t t
. (5.15)
Ţinând seama că viteza particulei M din fig. 5.2 este v r pe de o parte, iar pe de altă parte luând în considerare expresia (5.11), relaţia (5.15) devine echivalentă cu:
v r s . (5.16)
Ştiind că viteza liniară este o mărime vectorială, relaţia (5.16) caracterizează modulul acesteia, drept urmare expresia vectorului viteză, derivată din ecuaţia (5.16), ia forma:
v r (5.17)
Expresia anterioară, demonstrează că viteza unghiulară este o mărime vectorială, care închide, cu vectorul de poziţie, unghiul .cst Aşadar, vectorul viteză unghiulară este orientat după axa de
rotaţie, care în exemplul din fig.5.2, este axa zO . Astfel, vectorul , este echivalent cu:
0 0T
k . (5.18)
În relaţia (5.17), se introduce notaţia , reprezentând matricea antisimetrică asociată vectorului
, exprimată astfel:
0 0 0 0 1 00 0 0 1 0 0
0 0 0 0 0 00
z y
z x
y x
k , (5.19)

MECANICĂ*N* NC.05. Studiul cinematic al mişcării relative a punctului material
‐ 92 ‐
unde k este matricea antisimetrică asociată versorului k , ce exprimă orientarea axei de rotaţie.
Variaţia în raport cu timpul a vitezei unghiulare este pusă în evidenţă printr-o altă mărime cinematică, denumită acceleraţie unghiulară. În cazul exemplului prezentat în fig.5.2, rezultă:
0
limt
dk k
t dt
. (5.20)
Întrucât versorul .k cst vectorul acceleraţie unghiulară este echivalent cu:
k . (5.21)
Aşadar, în cazul mişcării circulare, vectorul acceleraţie unghiulară , este coliniar cu vectorul viteză unghiulară , ambii vectori fiind dirijaţi după axa de rotaţie.
NC.05.3. Derivata matricei de rotaţie în raport cu timpul
În conformitate cu fig.5.2, ecuaţia vectorială a traiectoriei de mişcare absolută a punctului M se scrie sub forma:
0 0 ;S
r t O O OM t O O R z t OM . (5.22)
Asupra expresiei (5.22) se aplică derivata absolută de ordinal întâi în raport cu timpul, rezultând:
.
;S
r t OM R z OM . (5.23)
Se introduce artificiul matematic, conform căruia 3; ;T
R z R z I , unde TR este transpusa
matricei de rotaţie, iar 3I reprezintă matricea unitate. Astfel, expresia (5.23) se rescrie:
; ; ; ; ;ST T
r t R z R z R z OM R z R z OM . (5.24)
Ţinând seama de (5.17) şi (5.22), se scrie expresia vectorială a vitezei liniare:
0 0v r r O O OM O O OM OM , (5.25)
unde 0 0O O . Expresiile (5.24) şi (5.25) sunt identice şi exprimă viteza punctului M .
Prin identificare, se obţine următoarea proprietate cu privire la derivata în raport cu timpul a matricei de rotaţie:
; ;TR z R z , (5.26)
Conform proprietăţii (5.26), matricea antisimetrică asociată vectorului viteză unghiulară este definită ca fiind produsul matriceal dintre derivata în raport cu timpul a matricei de rotaţie şi transpusa acesteia. Dezvoltând expresia din membrul drept al ecuaţiei (5.26) rezultă:
0 0 0 1 0
0 0 1 0 0
0 0 0 0 0 1 0 0 0
s c c s
c s s c k
(5.27)

MECANICĂ*N* NC.05. Studiul cinematic al mişcării relative a punctului material
‐ 93 ‐
adică, o expresie identică cu (5.19).
Ţinând seama de expresiile (5.19) şi (5.26), se scrie următoarea identitate matriceală:
; ; ; ;T TR k R k R k R k k . (5.28)
Observaţie: Identitatea ; ; ; ;T TR k R k R k R k este adevărată numai în cazul
rotaţiilor simple. În caz contrar, rezultă matricea antisimetrică asociată vectorului viteză unghiulară , cu proiecţie pe sistemul mobil, adică:
; ;S TR k R k . (5.29)
Proprietatea (5.29) arată că matricea antisimetrică asociată vectorului viteză unghiulară cu proiecţie pe sistemul de referinţă mobil, reprezintă produsul matriceal dintre transpusa matricei de rotaţie şi derivata de ordinul întâi în raport cu timpul a aceleiaşi matrice de rotaţie. Cele două proprietăţi, (5.26) şi (5.29) se extind asupra mişcării de rotaţie rezultantă, anterior exprimată prin setul de unghiuri Euler (5.1), dar şi matricea de rotaţie rezultantă (3.54) din capitolul NB.03. Drept urmare, matricea antisimetrică asociată vectorului viteză unghiulară de rotaţie rezultantă, cu proiecţie pe sistemele de referinţă fix şi mobil, ia forma:
0 00
0
0
z yT
z x s s
y x
R R
(5.30)
0 0
0
0
0
S Sz y
S S S Tz x s s
S Sy x
R R
. (5.31)
Expresia (5.30), se dezvoltă în formă matriceală, după cum urmează:
; ; ; ; ; ;
; ; ; ; ; ;
; ; ; ; ; ;
T T T
T T T
T T T
R z R x R z R z R x R z
R z R x R z R z R x R z
R z R x R z R z R x R z
(5.32)
În urma efectuării transformărilor matriceale şi diferenţiale, aplicate asupra expresiei (5.32), se obţine vectorul viteză unghiulară , sub următoarea formă:
0 1 0
0 ; 0 ; ; 0
1 0 1
x
y
z
R z R z R x
. (5.33)
Expresia (5.33, se scrie sub formă matriceală:

MECANICĂ*N* NC.05. Studiul cinematic al mişcării relative a punctului material
‐ 94 ‐
0
0
1 0
x
y
z
c s s
s c s J
c
(5.34)
unde J reprezintă matricea de transfer unghiulară dintre derivatele în raport cu timpul ale
unghiurilor lui Euler (incluse în ) şi componentele vectorului viteză unghiulară pe axele sistemului de referinţă fix. Din expresia (5.34) rezultă proiecţiile vectorului viteză unghiulară pe axele sistemului de referinţă fix, cunoscute sub denumirea de ecuaţiile cinematice Euler, exprimate conform cu:
; ; .x y zc s s s c s c (5.35)
Dezvoltând expresia (5.31) şi procedând similar cu analiza anterioară, se obţine vectorul viteză unghiulară , cu proiecţii pe axele sistemului de referinţă mobil astfel:
0 1 0
; ; 0 ; 0 0
1 0 1
Sx
S T T Ty
z
R z R x R z
. (5.36)
Expresia anterioară, sub formă matriceală, devine:
00
0
0 1
Sx
S STy s
z
s s c
R c s s J
c
. (5.37)
Componentele vectorului viteză unghiulară , pe axele sistemului de referinţă mobil, cunoscute de asemenea sub denumirea de ecuaţiile cinematice Euler, rezultă din (5.37), astfel:
; ; .S S S
x y zs s c c s s c (5.38)
Expresiile (5.34) şi (5.37), se pot scrie sub forma:
S S
J , unde ;S S . (5.39)
În conformitate cu expresia de definiţie (5.20), acceleraţia unghiulară, reprezintă derivata de ordinul întâi în raport cu timpul a vectorului viteză unghiulară de rotaţie. Pentru aplicarea acestei definiţii, în cazul mişcării de rotaţie rezultantă, mai întâi se fac următoarele transformări:
0,
TS S S S STs x y zR unde (5.40)
0 0S T Ts sR R (5.41)
unde S şi
S reprezintă, conform relaţiilor anterioare, viteza şi acceleraţia unghiulară, cu proiecţii
pe sistemul de referinţă mobil, iar 0 Ts R este transpusa matricei de rotaţie rezultantă (3.54) din
capitolul NB.03. Întrucât, în expresia (5.40) vectorul S este reprezentat numai prin componentele

MECANICĂ*N* NC.05. Studiul cinematic al mişcării relative a punctului material
‐ 95 ‐
scalare pe axele unui sistem de referinţă mobil, derivata acestuia în raport cu timpul are un caracter relativ şi drept urmare se obţin relaţiile:
0 0
TS T
s sR Rt
(5.42)
0 0
TS ST
s sR Rt
. (5.43)
Al doilea termen din membrul drept al expresiei (5.43), se dezvoltă, pe de o parte ţinând seama că
0 03
Ts sR R I , iar pe de altă parte în consonanţă cu proprietatea (5.31). Astfel, se obţine:
0 0 0 0 0 0
0 00
T T T STs s s s s s
T TS S S STs s
R R R R R R
R R
(5.44)
Aşadar, în urma dezvoltării de mai sus, rezultă următoarea proprietate:
S Sd
dt dt. (5.45)
Conform expresiei (5.45), în cazul parametrilor cinematici unghiulari, derivata absolută în raport cu timpul, este egală cu derivata relativă în raport cu timpul, aplicată aceluiaşi vector cu proiecţie pe sistemul de referinţă mobil.
Drept urmare, expresia de definiţie, pentru vectorul acceleraţie unghiulară se poate scrie:
S SS S d
dt t
, unde
;S S . (5.46)
Ţinând seama de expresiile (5.34) şi (5.37), rezultă:
,
TS S SJ J unde (5.47)
0
0
0 0
s c s s cd
J J c s s c cdt
s
(5.48)
0
0
0 0
S Sc s s c s
dJ J s s c c c
dts
. (5.49)
Ţinând seama de expresiile (5.34) şi (5.37) pe de o parte, iar pe de altă parte de expresia (5.47), rezultă în urma unor transformări matriceale, că:
0S S , (5.50)
ceea ce arată că în cazul mişcărilor de rotaţie rezultantă, vectorii şi nu sunt coliniari.

MECANICĂ*N* NC.05. Studiul cinematic al mişcării relative a punctului material
‐ 96 ‐
NC.05.4. Legea de compunere a vitezelor în mişcarea relativă
Ecuaţia de plecare în determinarea legii de compunere a vitezelor în mişcarea relativă este (5.3). Asupra acestei ecuaţii se aplică derivata absolută ordinul întâi în raport cu timpul, rezultând:
0Mr r r , (5.51)
unde
M ar v , iar 0 0r v ; (5.52)
av fiind viteza absolută, care se va determina în funcţie de mişcarea relativă a punctului M , iar
0v reprezintă viteza absolută a originii sistemului de referinţă mobil. Semnificaţia vectorului 0r din
expresia (5.51) se stabileşte în urma aplicării derivatei absolute de ordinul întâi în raport cu timpul asupra relaţiei (5.2), rezultând:
0 0s
ss s
rr R r R
t
. (5.53)
Primul termen din membrul drept al expresiei anterioare se dezvoltă în conformitate cu proprietatea (5.30) privind derivata în raport cu timpul a matricei de rotaţie, rezultând relaţia:
0 0 0 0s sTs s s sR r R R R r r . (5.54)
şi reprezintă viteza de rotaţie.
Observaţii: Pentru a defini caracterul expresiei sr
t
din (5.53), se scrie mai întâi, conform cu
expresia (5.2) următoarea relaţie de transfer a vectorului r , cu proiecţie pe sistemul S :
0 Ts S S STsr R r x y z . (5.55)
Derivata absolută în raport cu timpul a vectorului sr , este:
0 0s
T Ts s
d r drR R r
dt dt (5.56)
reprezentând o relaţie de transfer din sistemul de referinţă fix, pe sistemul de referinţă mobil.
Întrucât în expresia (5.55), vectorul sr este reprezentat numai prin componente scalare pe axele
sistemului de referinţă mobil, aplicarea derivatei în raport cu timpul asupra relaţiei (5.55) conduce la:
0 0s
T Ts s
rR r R r
t
(5.57)
unde sr
t
are caracterul unei derivate relative în raport cu timpul. Se aplică asupra expresiei (5.57)
următoarele transformări diferenţiale:

MECANICĂ*N* NC.05. Studiul cinematic al mişcării relative a punctului material
‐ 97 ‐
0s s
Ts
d r rR r
dt t
(5.58)
00
T S Ss R r r (5.59)
unde S este rezultatul transformărilor din (5.44). Ca urmare, se obţin expresiile:
s s
S Sd r rr
dt t
(5.60)
s s
d r r
dt t
. (5.61)
Aşadar, în cazul parametrilor cinematici liniari, derivata absolută în raport cu timpul nu este identică cu derivata relativă în raport cu timpul, aplicate aceluiaşi vector cu proiecţii pe sistemul de referinţă mobil.
Ţinând seama de expresia (5.61), al doilea termen din relaţia (5.53) se notează:
0s
s rr
R vt
, (5.62)
unde rv reprezintă viteza relativă a punctului material, cu proiecţii pe sistemul de referinţă fix.
Substituind expresiile (5.54) şi (5.62) în relaţia (5.53), rezultă:
0 0s
ss s r
rr R r R r v
t
. (5.63)
Substituind expresiile (5.52), respectiv (5.63) în ecuaţia de plecare (5.51), rezultă:
0a rv v r v (5.64)
Ţinând seama de semnificaţia mişcării de transport, viteza specifică acestui tip de mişcare este denumită viteză de transport şi este reprezentată în expresia (5.64), prin expresia de definiţie:
0tv v r , (5.65)
Ca urmare, legea de compunere a vitezelor în mişcarea relativă, ia forma finală:
a r tv v v . (5.66)
Conform expresiei (5.66), viteza absolută av a punctului material M , reprezintă suma vectorială
dintre de viteza transport tv şi viteza relativă rv , adică suma vectorială a celor două tipuri de
mişcări ce compun mişcarea absolută.
NC.05.5. Legea de compunere a acceleraţiilor în mişcarea relativă
Pentru determinarea legii de compunere a acceleraţiilor se poate utiliza ca şi ecuaţie de plecare fie expresia (5.3), fie (5.64). În primul caz, trebuie aplicată derivata absolută de ordinul doi în raport cu timpul. Întrucât studiul vitezelor s-a efectuat în paragraful anterior, se preferă utilizarea expresiei (5.64) asupra căreia se aplică derivata absolută de ordinul întâi în raport cu timpul:

MECANICĂ*N* NC.05. Studiul cinematic al mişcării relative a punctului material
‐ 98 ‐
0a rv v r r v , (5.67)
unde,
a av a , 0 0v a . (5.68)
În (5.68), aa reprezintă acceleraţia absolută a punctului material; 0a este acceleraţia absolută a
originii sistemului de referinţă mobil, iar acceleraţia unghiulară exprimând mişcarea de rotaţie rezultantă, componentă a mişcării generale a sistemului de referinţă mobil.
Expresia (5.63) este substituită în al doilea termen al membrului drept, din (5.67), rezultând
rr r v . (5.69)
Pentru dezvoltarea termenului rv din expresia (5.67), se aplica asupra expresiei de definiţie a
vitezei relative (5.62) derivata absolută în raport cu timpul. Astfel, rezultă expresia:
2
0 0 02
s s s
r s s sd r r r
v R R Rdt t t t
. (5.70)
Asupra primului termen din expresia anterioară, se aplica proprietatea (5.30), rezultând:
0 0 0 0s s
Ts s s s r
r rR R R R v
t t
. (5.71)
Al doilea termen din membrul drept din expresia (5.70) este simbolizat astfel:
20
2
s
s rr
R at
. (5.72)
unde ra reprezintă acceleraţia în mişcarea relativă a punctului material cu proiecţie pe sistemul de
referinţă 0 . Ținând seama de expresiile (5.71) şi (5.72), relaţia (5.70), ia forma:
r r rv v a . (5.73)
Substituind relaţiile (5.68), (5.69) şi (5.73) în ecuaţia de plecare (5.67), rezultă:
0 2a r ra a r r v a . (5.74)
Fără a lua în considerare mişcarea relativă, adică 0rv şi 0ra , expresia (5.74) devine:
0 ta r r a , (5.75)
unde ta este acceleraţia în mişcarea de transport a punctului material M .
Aşadar, mişcarea relativă din punctul de vedere al acceleraţiei, este reprezentata prin componenta
ra , definită cu expresia (5.72) şi respectiv prin:
2 r Cv a . (5.76)

MECANICĂ*N* NC.05. Studiul cinematic al mişcării relative a punctului material
‐ 99 ‐
unde Ca poartă denumirea de acceleraţia Coriolis (acceleraţie complementară care apare în
exclusivitate atunci când punctul se află într-o mişcare relativă). Ținând seama de notaţiile (5.75), (5.76) şi (5.72), expresia (5.74), se rescrie sub forma finală:
a r t Ca a a a . (5.77)
Expresia anterioară, poartă denumirea de legea de compunere a acceleraţiilor în mişcarea relativă a punctului material cunoscută şi sub numele de teorema lui Coriolis. În conformitate cu această teoremă, acceleraţia absolută a punctului material, reprezintă suma vectorială dintre acceleraţia de
transport ( ta ) şi celelalte două componente specifice mişcării relative: acceleraţia relativă ( ra ) şi
acceleraţia Coriolis ( Ca ).
NC.05.6. Aplicație
Un pendul matematic A de lungime l oscileaza într-un plan orizontal. De punctul A este legat un al doilea pendul matematic B de aceeasi lungime l, conform figurii alăturate. Luând în considerare sistemului mecanic format din cele două pendule matematice perfect identice, să se determine
parametrii de poziție și orientare ai sistemelor de referință atașate în punctele A și B, respectiv viteza absolută a punctului B.
Rezolvare:
Proiecțiile vectorului de poziție al punctului A pe sistemul de referință fix se determină, conform figurii, cu relațiile:
1 1cos ; sin ; A Ax l q y l q (1)
Matricea de rotație, care exprimă orientarea sistemului atașat în punctul A are forma:
1 1
1 1 1
cos sin 0
, sin cos 0
0 0 1
A
q q
R z q q q . (2)
Vectorul de poziție a punctului B în raport cu sistemul din punctul A se determină conform cu relațiile:
2 1 2 1cos ; sin ; r rB Bx l q q y l q q (3)
Orientarea sistemului din punctul B în raport cu același sistem se determină cu matricea:
2 1 2 1
2 1 2 1 2 1
cos sin 0
, sin cos 0
0 0 1
rB
q q q q
R z q q q q q q (4)
iar în raport cu sistemul fix de referință este exprimată cu ajutorul matricei de rotație de mai jos:
2 2
2 1 2 2
cos sin 0
, sin cos 0
0 0 1
B
q q
R z q q q q . (5)
0y
0x
l
1q
0O
2q
AxBx
Ay
BylA
B
Fig. 5.3.

MECANICĂ*N* NC.05. Studiul cinematic al mişcării relative a punctului material
‐ 100 ‐
Viteza absolută a punctului B se determină utilizând ecuația următoare:
B B Ba r tv v v .
Derivând relațiile (3) se determină viteza relativă a punctului B rezultând ecuațiile de mai jos:
2 1 2 1 2 1 2 1sin ; cos ; r rB Bx q q l q q y q q l q q (1)
2 2
2 1 ; B r rr B Bv q q lx y (2)
Pentru determinarea vitezei de transport se utilizează relația:
Bt A tv v AB ; (3)
Primul termen din (3) se determină derivând relațiile (1) rezultând viteza punctului A:
1 1 1 1sin ; cos ; A Ax q l q y q l q (4)
iar termen al doilea are forma:
1 2 1 2
1 2 1 2
0 0 cos sin
0 0 sin cos
0 0 0 0 0
t
q l q q l q
AB q l q q l q ; (5)
Utilizând relațiile (1), (4) și (5) viteza absolută a punctului A se determină cu:
2 1 2 1 1 1 2
2 1 2 1 1 1 2
sin sin sin
cos cos cos
0
B B Ba r t
q q l q q q l q qv v v q q l q q q l q q . (6)
O altă metodă de rezolvare se bazează numai pe studiul mișcărilor punctului B, după cum urmează: - mișcarea relativă a punctului material B este mișcarea acestuia față de pendulul O0A ca și când acesta ar fi fix. În consecință, este o mișcare circulară pe un cerc de rază egală cu lungimea
pendulului AB și cu viteza unghiulară 2q . Rezultă viteza relativă (vezi fig.5.4.) cu modulul:0
2qlv Br (12)
care are direcția perpendiculară pe AB și sensul dat de creșterea unghiului q2.
- mișcarea de transport este o mișcare incipientă a punctului B odată cu pendulul AB ca și când acesta ar fi solidar cu pendulul O0A, care are o mișcare de rotație față de elementul fix. Rezultă viteza de transport cu direcția perpendiculară pe primul pendul, sensul dat de sensul de creștere al unghiului q1 și mărimea:
1qlv Bt (13)
Din motive geometrice lesne de înțeles (unghiuri cu laturi perpendiculare) unghiul dintre cele două viteze este egal cu (q2- q1).
Deoarece viteza absolută este dată de relația:
Fig. 5.4.
1q
0O
2q
A
B

MECANICĂ*N* NC.05. Studiul cinematic al mişcării relative a punctului material
‐ 101 ‐
Bt
Br
Ba vvv , (14)
mărimea vitezei absolute a punctului B , care rezultă din compunerea geometrică a celor doi vectori, va fi dată de expresia:
)cos(2 12222
qqvvvvv Bt
Br
Bt
Br
Ba , (15)
sau dacă se introduc expresiile (12) și (13)
)cos(2 122122
222
122
qqqqlqlqlv Ba . (16)
Același rezultat se obține și dacă se utilizează proiecțiile vectorului viteză absolută a punctului B din matricea (11).

MECANICĂ*N* NC.06. Mişcarea relativă a sistemelor de corpuri
‐ 102 ‐
Capitolul NC.06. Mişcarea relativă a sistemelor de corpuri
Cuvinte-cheie Studiul geometric sub formă matriceală, Grade de libertate, Operator, Matricea de rotaţie, Vector de orientare,
Singularitate geometrică, Vector de poziţie, Coordonatele generalizate, Viteza şi acceleraţia unghiulară, Legea de compunere a vitezei unghiulare, Legea de compunere a accelerației unghiulare,
Viteză şi acceleraţie liniară, Parametrii mişcării absolute
NC.06.1. Studiul geometric sub formă matriceală a sistemelor de corpuri
Mişcarea relativă a sistemelor de corpuri se bazează pe de o parte pe parametrii, care exprimă poziţia şi orientarea fiecărui corp în raport cu un sistem de referinţă fix, precum şi în raport cu celelalte corpuri, între care se realizează o legătură fizică. De aceea, în cele ce urmează, se apelează expresiile consacrate definirii poziţiei şi orientării, dezvoltate, de asemenea în capitolele NB.03-04 şi preluate într-o formă simbolică în NC.05.1. Pe de altă parte, mişcarea relativă, analizată în exclusivitate sub aspect cinematic, se bazează pe expresiile de definiţie cu privire la vitezele şi acceleraţiile unghiulare, dezvoltate în subcapitolele anterioare, dar şi pe proprietăţile definite în secţiunile precedente ale prezentului capitol.
Mai întâi, se face studiul geometric, sub formă matriceală a unui sistem de n corpuri, simbolizate
prin iS , unde 1,2,... 1i n n , legate între ele, aşa cum rezultă din Fig.6.1.
În ipoteza, conform căreia cele n corpuri ar fi libere (nelegate între ele), întregul sistem ar poseda
6 n grade de libertate, de forma (5.1), şi respectiv (3.54), pentru fiecare corp în parte. O altă
ipoteză introdusă în acest studiu, arată că legăturile dintre corpuri devin cuple de clasa , ,V IV III ,
caracterizate prin 1; 2; 3 grade de libertate.
Asupra sistemului se aplică un număr de 6p n restricţii cinematice, care limitează mobilităţile
simple ale întregului sistem de corpuri, drept urmare, numărul gradelor de libertate devine:
6k n p (6.1)
Fig. 6.1.
11
iiip
0y
0x
1i
0z
P
0O
0
1iO
i
n
iO
nip
npip
p n
prnO1ip

MECANICĂ*N* NC.06. Mişcarea relativă a sistemelor de corpuri
‐ 103 ‐
Studiul,geometric şi cinematic al fiecărui corp iS , se efectuează cu ajutorul unui sistem de
referinţă i i i iO x y z i , invariabil legat de corp cu originea într-un punct arbitrar al acestuia. Se
introduce ipoteza conform căreia sistemul mecanic format din cele n corpuri este parcurs în sens
direct de la 0 nS . Ca urmare, numărul gradelor de libertate ale corpului iS este:
1 , 1, 2, .... 1ik k i n n (6.2)
În consecinţă, secvenţa de corpuri 0 iS posedă iN grade de libertate adică:
1
, 1, 2, 3.....i
i jj
N k i n
(6.3)
Întregul sistem de corpuri: , , , ,1 i nS S S posedă nk N grade de libertate, definite prin:
1
n
n jj
k N k (6.4)
Pentru studiul geometric, se consideră mai întâi, secvenţa de două corpuri legate 1i iS S ,
având ataşate sistemele de referinţă 1 1 1 1i i i i i i i iO x y z O x y z . Întrucât, legăturile dintre corpurile
care compun sistemul mecanic luat în studiu, permit translaţii şi/sau rotaţii, corpul iS faţă de
1iS , se caracterizează prin gradele de libertate numite, sub aspect cinematic şi dinamic,
coordonate generalizate. Acestea pot fi coordonate liniare şi/sau unghiulare, simbolizate jq şi sunt
incluse în simbolul 1ii , având în algebra matriceală semnificaţia unui vector coloană de forma:
11 , 1 , 1 T
j i iii q j N N i n (6.5)
unde T semnifică transpusa unei matrice. Acelaşi corp iS , faţă de sistemul de referinţă fix, se
caracterizează prin gradele de libertate, incluse, în formă simbolică, în vectorul coloană:
1 , 1TT
i jj j i (6.6)
Complexitatea acestui studiu impune introducerea operatorului i , având două valori posibile:
1 0 i ipentru mişcarea de rotaţie şi pentru mişcarea detranslaţie . (6.7)
Studiul privind orientarea sistemului de corpuri. Orientarea corpului 1iS , faţă de sistemul de
referinţă fix, este definit prin matricea de orientare:
01 1i iR tR (6.8)
care este o funcţie matriceală de componentele vectorului coloană 1i t , reprezentate prin
coordonatele unghiulare independente:

MECANICĂ*N* NC.06. Mişcarea relativă a sistemelor de corpuri
‐ 104 ‐
1 1 , 1 1TT
i jjt j i (6.9)
unde
1 1, 1 jj m m j jq m N N . (6.10)
Aşadar, orientarea corpului iS , faţă de 1iS este exprimată conform cu expresia:
11, 1
ii j j i iR q j N NR . (6.11)
Orientarea corpului iS , faţă de sistemul 0 , se defineşte prin matricea de rotaţie reprezentată
prin:
0 0 11
ii i iR R R
(6.12)
Cunoscând matricea de rotaţie care descrie orientarea corpurilor , 1 jS unde j i , expresia
anterioară, se poate rescrie ca fiind:
0 0 1 1 11
1
ij i ji j i j
jR R R R R
. (6.13)
Pentru i n , orientarea fiecărei axe a sistemului n , ataşat corpului nS , faţă de sistemul de
referinţă fix 0 , este exprimată prin următoarea matrice de rotaţie:
0 1 0 11
1
n i nn i n n
iR R R R
(6.14)
0 0, 1
n n n n n j j
nx ny nz
c c c
i j k c c c q j kR Rc c c
, (6.15)
adică cos , ; ; , ,u u u j jc u x y z c f q j 1 k .
Expresia (6.15) arată că orientarea este o funcţie matriceală de coordonatele unghiulare
independente ale sistemului mecanic de n corpuri: , , , ,1 i nS S S . Expresia (6.15) reprezintă
orientarea fiecărei axe a sistemului n ataşat ultimului corp nS faţă de sistemul de referinţă
fix 0 . Orientarea corpului nS se exprimă prin setul de unghiuri Euler, care se obţine din
identitatea matriceală de mai jos:
0nR R , (6.16)
unde R este exprimată prin (3.54) (vezi § NB.03.3.).

MECANICĂ*N* NC.06. Mişcarea relativă a sistemelor de corpuri
‐ 105 ‐
Conform cu (5.1), setul de unghiuri Euler este inclus în simbolul având în algebra matriceală semnificaţia unui vector coloană, numit în acest capitol vector de orientare. Unghiurile Euler sunt
funcţii de coordonatele unghiulare independente ale sistemului mecanic format din n corpuri
simbolizate: , , , ,1 i nS S S . Rezultă, astfel, expresia:
, 1
j j
tq j kt t
t
(6.17)
Pentru determinarea unghiurilor de orientare, se aplică funcţia trigonometrică inversă:
tan 2 sin ;cos tan 2 s ; A A c . (6.18)
Intervalul de definire a funcţiei tan 2A este: ; . Această funcţie inversă stabileşte valoarea
unghiurilor, în cadranul corespunzător, fiind o funcţie de semnul celor două argumente: s şi c .
Expresia (6.16), fiind o identitate matriceală, rezultă că ; ;stg dr
linia i coloana j linia i coloana j ,iar
membrul stâng devine o matrice a necunoscutelor. Mai întâi, se caută, în membrul stâng, funcţia trigonometrică cea mai simplă. Astfel, ţinând seama de expresia (6.18), prin identificare rezultă:
1;1 ; 1 (10.92) ; 1 nz nz j jc c unde din c f q j k , (6.19)
Expresia (6.19) arată că determinarea unghiurilor Euler se bazează pe două cazuri posibile.
Primul caz rezultă din condiţia 1;1nzc . Ca urmare, unghiul de nutaţie devine 2
, adică:
cos cos ; 1nz j jArc c Arc f q j k . (6.20)
Ţinând seama de (6.20), prin identificarea elementelor (1,3) şi (2,3), respectiv (3,1) şi (3,2), se determină unghiul de precesie şi respectiv unghiul de rotaţie proprie cu relaţiile:
1 1sin ; cos ; tan 2 ;
1 1sin ; cos ; tan 2 ;
nz nz
nx ny
s c c c A s cs s
s c c c A s cs s
. (6.21)
Al doilea caz, din (6.19), este 1nzc . În această situaţie 2 , iar soluţiile (6.21) pentru
unghiul de precesie şi unghiul de rotaţie proprie sunt degenerate sub aspect matematic.
Această situaţie este cunoscută sub denumirea de singularitate geometrică pentru orientare. O soluţie posibilă este alegerea unui alt set de unghiuri pentru orientare din mulţimea celor 12 seturi cunoscute în literatura de specialitate.
Studiul privind poziţia sistemului de corpuri. Cunoscând vectorul de poziţie dintre sistemele
1i i , proiectat pe sistemul 1i , simbolizat prin 1
1i
iip
,precum şi matricea de rotaţie
dintre sistemul i şi sistemul 0 ,adică 0i R , se poate determina proiecţia vectorului de poziţie
dintre sistemele 1i i , proiectat pe sistemul fix 0 , prin utilizarea expresiei:

MECANICĂ*N* NC.06. Mişcarea relativă a sistemelor de corpuri
‐ 106 ‐
0 11 1
iii i iip pR
. (6.22)
Vectorul de poziţie 1
1i
iip
, este substituit prin expresia:
1 1 0 11 1 1
i i ii i i i i i ip p p t (6.23)
unde operatorul 1; 0i , are următoarea semnificaţie: 1 11 11,
i i
ii i idacă p p t ,
respectiv 110, .
i
i idacă p cst Ţinând seama de expresiile (6.22) şi (6.23), respectiv cunoscând
vectorul de poziţie: 1 1 1i i ip p t , se poate determina poziţia sistemului i i i iO x y z i ,
ataşat corpului iS faţă de sistemul de referinţă fix 0 , după cum urmează:
0 11 1 1 1
ii i ii i i iip p p p pt t t t tR
. (6.24)
Expresia anterioară, se poate rescrie în conformitate cu următoarea relaţie:
0 11 1 1
1 1
i i ji jj j jj
j j
p p pR
(6.25)
Parcurgând întregul sistem de corpuri: , , , ,1 i nS S S , poziţia sistemului de referinţă n ,
ataşat corpului nS faţă de sistemul de referinţă fix se exprimă prin ecuaţia vectorială:
0 11 1 1
1 1
n n in ii i ii
i i
p p pR . (6.26)
Conform cu (6.26), poziţia ultimului corp nS , este o funcţie de coordonatele generalizate:
; 1
xn
yn jn n
zn
p tp q j ktp p ttp t
. (6.27)
Expresia (6.27) arată că vectorul de poziţie al originii sistemului n este o funcţie vectorială de
toate cele k grade de libertate ale sistemului mecanic. Astfel, ţinând seama de expresiile (6.17) şi
(6.27), parametrii corespunzători poziţiei şi orientării sistemului n , ataşat corpului nS , faţă de
sistemul de referinţă fix sunt incluşi în simbolul X t , care în algebra matriceală, conform cu (5.1),
din capitolul NC.05, reprezintă un vector coloană de dimensiuni 6 1 , scris sub formă matriceală
astfel:
; 1
1 6
T Txn yn zn i in j
T
p p pt t t q unde i kp X ttX t
t iar jt t t. (6.28)
Expresia (6.28), sub o formă explicită arată astfel:

MECANICĂ*N* NC.06. Mişcarea relativă a sistemelor de corpuri
‐ 107 ‐
1
2
3
; 1
; 1
; 1
ixn
in yn
izn
q unde i kX tp t
q unde i kp p X tt t
q unde i kXp tt
(6.29)
4
5
6
; 1
; 1
; 1
i i
i i
i i
q unde i kX tt
q unde i kX tt t
t q unde i kX t
. (6.30)
În expresiile de mai sus, operatorul j prezintă două valori posibile: j 1 în cazul vectorului de
poziţie şi respectiv i i în cazul unghiurilor de orientare, unde i are valorile din (6.7).
NC.06.2. Legea de compunere a vitezelor şi acceleraţiilor unghiulare
Pentru determinarea expresiilor vitezei şi acceleraţiei unghiulare de rotaţie, conform cu fig.6.1., se
consideră o secvenţă de corpuri: 10 i iS S legate între ele. Rotaţia absolută a sistemului
1i , reprezentată prin vectorii: 1 1 1;i i i , precum şi rotaţia relativă a sistemului i în
raport cu 1i , dată prin: vectorii 1 1 1; ii ii ii se presupun cunoscute. Necunoscutele
devin parametrii cinematici ; i i i ,care exprimă rotaţia absolută a sistemului i , ataşat
corpului iS , adică viteza şi acceleraţia unghiulară absolută. Pentru acest studiu sunt apelate
matricele de rotaţie (6.12) şi (6.11). Asupra matricei de rotaţie 0i R t , descrisă prin expresia (6.12),
se aplică derivata absolută de ordinul întâi în raport cu timpul şi astfel rezultă:
0 0 1 1 11
i i ii i i i i it R RR R R
. (6.31)
Pe baza proprietăţii cu privire la derivata absolută de ordinul întâi în raport cu timpul a matricei de rotaţie (5.30), din capitolul NC.05, fiecare termen din membrul stâng şi drept al expresiei (6.31) sunt dezvoltaţi astfel
0 0 0 0 0Tii i i i iR R RR R (6.32)
0 1 0 0 0 1 011 1 1 1
i iTii i i i i i iR R R R RR R (6.33)
0 1 01 111
ii i Tiii i ii iR R RRR . (6.34)
Substituind expresiile (6.32), (6.33) şi (6.34) în relaţia (6.31), identificând membrul stâng al produsului vectorial, se obţine expresia de definiţie a vitezei unghiulare absolute sau legea de
compunere a vitezei unghiulare corespunzătoare sistemului mobil i ataşat corpului iS , după
cum urmează:
1 1i i i ii , (6.35)

MECANICĂ*N* NC.06. Mişcarea relativă a sistemelor de corpuri
‐ 108 ‐
unde 1 i reprezintă viteza unghiulară de transport, iar 1 ii viteza unghiulară relativă, aceasta din
urmă fiind condiţionată de existenţa a cel puţin unei cuple de rotaţie care să reflecte rotaţia relativă
a corpului iS faţă de corpul 1iS .
Pentru determinarea acceleraţiei unghiulare absolute a sistemului i , ataşat corpului iS , expresia
vitezei unghiulare (6.35) este derivată în raport cu timpul, rezultând:
1 1i i i ii (6.36)
unde:
i i , 1 1 i i . (6.37)
Pe baza proprietăţilor (5.30) şi (5.45), din capitolul NC.05, asupra derivatei în raport cu timpul din (6.36), se operează câteva transformări diferenţiale, în urma cărora se obţine expresia de definiţie pentru
derivata în raport cu timpul a vitezei unghiulare relative simbolizată în (6.36) prin 1 ii , adică:
101 11 i
ii iii R
101 11
11 0 11 1 1 11 1
iii iii
ii iii i ii iiii ii
dRdt
RRt
(6.38)
unde
0 11 1 1
i
ii i iiRt
. (6.39)
Vectorul 1 ii exprimat prin (6.39) poartă denumirea de acceleraţie unghiulară relativă, care
împreună cu acceleraţia complementară 1 1 i ii şi viteza unghiulară 1 ii caracterizează sub
aspect cinematic mişcarea de rotaţie relativă a corpului iS faţă de corpul 1iS , condiţionată
fiind, aşa cum se arăta mai sus de existenţa a cel puţin unei cuple de rotaţie, între cele două corpuri ale sistemului mecanic. Substituind (6.37), (6.38) în expresia (6.36), acceleraţia unghiulară absolută, sau legea de compunere a accelerației unghiulare, corespunzătoare sistemului mobil
i ataşat corpului iS , ia forma finală, astfel:
1 1 11 i ii iii i i . (6.40)
Aşadar, luând în considerare secvenţa de corpuri 10 i iS S , mişcarea de rotaţie absolută a
corpului iS se exprimă prin matricea de rotaţie (6.12) respectiv prin viteza şi acceleraţia
unghiulară absolută (6.35) şi (6.40).Acestea din urmă se pot rescrie sub forma generală, astfel:
0 11
i
i j jjj
(6.41)

MECANICĂ*N* NC.06. Mişcarea relativă a sistemelor de corpuri
‐ 109 ‐
1 1 101
i
j jj jji jj
(6.42)
unde 0 şi 0 exprimă rotaţia absolută a sistemului fix, având valorile: 0 0 şi 0 0 .
Dacă studiul cinematic necesită proiecţia vectorilor i şi i definiţi cu (6.41) şi (6.42), pe axele
sistemului de referinţa propriu i , atunci se utilizează expresia matriceală de transfer:
0 0;i iT T
i i i ii iR R . (6.43)
Parcurgând întregul lanţ cinematic al sistemului de corpuri: , , , ,1 i nS S S , adică pentru
1 i n în (6.41) şi (6.42), se obţin expresiile:
0 11
n
n i iii
(6.44)
1 1 101
n
i ii iin ii
. (6.45)
Aşadar, mişcarea de rotaţie absolută a sistemului n , ataşat corpului nS , este complet definită
sub aspect cinematic prin matricea de rotaţie (6.14), respectiv prin viteza unghiulară (6.44) şi acceleraţia unghiulară (6.45).
NC.06.3. Legea de compunere a vitezelor şi acceleraţiilor liniare
Pentru stabilirea expresiilor de definiţie ale vitezei şi acceleraţiei liniare absolute, conform cu
fig.6.1., se ia în studiu, pentru început, secvenţă de corpuri: 10 i iS S . Se presupune că
mişcarea absolută a originii 1 1iO i , reprezentată prin vectorii viteză şi acceleraţie liniară:
1 1 1; i i iv v a , precum şi mişcarea relativă a originii iO i faţă de 1i adică, 1 1;ii iiv v
este cunoscută. Tabloul parametrilor, care se presupun cunoscuţi, este completat prin:
0 1 01 1 1 11 ; ; ; ; ; ; ; ; ;i
i i i ii i i ii i ip p pR R R (6.46)
unde semnificaţia fiecărui termen este precizată în paragrafele prezentului capitol. Necunoscutele
acestui studiu sunt reprezentate prin parametrii cinematici, ; i i iv v a , adică viteza şi acceleraţia
liniară, care definesc mişcarea absolută a originii iO i a sistemului de referinţă mobil, invariabil
legat de corpul iS . Ecuaţiile de plecare, în cadrul acestui studiu cinematic sunt (6.23) şi (6.24).
Asupra expresiei (6.24), se aplică derivata absolută de ordinul întâi în raport cu timpul, astfel:
1 1i i iip p p . (6.47)
Se introduc următoarele notaţii: 1 1;i i i ip v p v , reprezentând viteza liniară absolută a
originii 1 1iO i şi respectiv viteza liniară absolută a originii iO i . Al doilea termen din
membrul drept al ecuaţiei (6.47), adică 1iip , se dezvoltă sub forma următoare:

MECANICĂ*N* NC.06. Mişcarea relativă a sistemelor de corpuri
‐ 110 ‐
0 1 10101 1 1111 1
i ii
ii ii i iiiiii i
dp R p R pptRdt t
. (6.48)
Ţinând seama de proprietatea (5.30), din capitolul NC.05, precum şi de (6.23), primul termen al membrului drept din expresia (6.48), devine:
0 01 10 01 1 1 11 11 1
i iT
ii ii i iii ii iR p R R R p p . (6.49)
Al doilea termen din membrul drept al expresiei (6.48) se simbolizează după cum urmează:
101 11
iii iii R p v
t (6.50)
fiind viteza liniară relativă a originii iO i în mişcarea relativă a acestuia faţă de sistemul 1i ,
mişcare condiţionată de existenţa, prin i , a cel puţin unei cuple care imprimă o astfel de stare.
Substituind (6.49) şi (6.50) în (6.48), se obţine expresia vectorului 1iip sub forma:
1 10 01 1 1 1 1 111
i iii ii i ii i ii i iiiip p p p vRR
t. (6.51)
Ca urmare, luând în considerare 1 1;i i i ip v p v şi (6.51) în (6.47), viteza liniară absolută a
originii iO i ia forma finală, mai jos scrisă, astfel:
1 1 11 1 1 1 01
i
j jj j jji i i ii i iij
p vv v p v v (6.52)
unde: 1 1 1 i i iiv p este viteza liniară în mişcarea de transport a sistemului i 1 ataşat
corpului i 1S .
În continuarea studiului se determină acceleraţia liniară absolută a originii iO i . În acest sens,
asupra expresiei vitezei liniare (6.52) se aplică derivata absolută în raport cu timpul, astfel:
1 1 1 1 1 1 i i i ii i ii i iiv v p p v (6.53)
unde 1 1 1 1; ;i i i i i iv a v a având semnificaţiile precizate în prezentul paragraf.
Asupra derivatei absolute de ordinul întâi, aplicată vitezei liniare relative, reprezentată prin ultimul termen din (6.53), se efectuează următoarele transformări diferenţiale:
11 1 11 011 1 1 1 1 1 1
ii i ii
i iiii ii ii ii i ii iid
v R v R v R v v adt t
(6.54)
unde
101 1 1
ii ii iiR v a
t (6.55)
vectorul 1iiv exprimând mişcarea relativă a originii iO i faţă de sistemul 1i , iar 1iia poartă
denumirea de acceleraţie liniară relativă a originii iO i , mişcarea fiind condiţionată de existenţa,
prin i , a cel puţin unei cuple care imprimă o astfel de stare. Ţinând seama de notaţiile

MECANICĂ*N* NC.06. Mişcarea relativă a sistemelor de corpuri
‐ 111 ‐
1 1 1 1; ;i i i i i iv a v a , care sunt substituite alături de (6.51) şi (6.54) în (6.53), se
obţine expresia finală pentru acceleraţia liniară absolută a originii iO i , adică:
1 11 1 1 1 1 1
1 1 1 1 1 1 101 1
2
2
i ii iii i i ii i i ii i
i i
j jj j j jj j jj jjjj j
v aa a p p
p p v aa. (6.56)
Parametrii cinematici 0v şi 0
a caracterizează, alături de 0 şi 0 , mişcarea absolută a sistemului
fix, având valorile: 0 0 şi 0 0 , respectiv 0v 0 , iar în anumite studii 0 0a g k , reprezentând
un vector egal în modul şi de sens invers acceleraţiei gravitaţionale 1 .
Dacă studiul cinematic necesită proiecţia vectorilor iv şi ia definiţi cu(6.52) şi (6.56), pe axele
sistemului de referinţa propriu i , atunci se utilizează expresia matriceală de transfer:
0 0;i iT T
i i i ii iv v a aR R (6.57)
Parcurgând întregul lanţ cinematic al sistemului de corpuri: , , , ,1 i nS S S , adică pentru
1 i n în (6.52) şi (6.56), se obţin expresiile:
0 1 1 11
n
n i ii i iii
v v p v (6.58)
0 11 1 1 1 10 1 111 1
2
in n
j jji ii i i iin i ii iiji i
p pa a v a (6.59)
Aşadar, mişcarea absolută a sistemului n , ataşat corpului nS , este complet definită sub aspect
cinematic prin parametrii de poziţie şi orientare exprimaţi cu (6.28) - (6.30), prin viteza unghiulară (6.44) şi acceleraţia unghiulară (6.45), respectiv prin viteza şi acceleraţia liniară definite mai sus prin expresiile (6.58) şi (6.59).
NC.06.4. Parametrii mişcării absolute a unui punct P
Studiul mişcării sistemului de corpuri: , , , ,1 i nS S S , simbolic reprezentat în fig.6.1., se
extinde asupra unui punct oarecare P , a cărui mişcare faţă de corpul nS este evidenţiată
matematic prin operatorul P , având semnificaţia din (6.23), adică: P 1 va arăta că punctul P este în
mişcare relativă faţă de corpul nS , iar P 0 va particulariza ecuaţiile pentru un punct P
aparţinând corpului nS . Cunoscând poziţia şi orientarea sistemului n n n nO x y z n , ataşat corpului
nS , cât şi vectorul de poziţie n
pr al punctului P , în raport cu acelaşi sistem n , vectorul de
poziţie al punctului P , în raport cu sistemul de referinţă fix 0 , se determină cu expresia:
0 nn p n n pp p r p rR . (6.60)

MECANICĂ*N* NC.06. Mişcarea relativă a sistemelor de corpuri
‐ 112 ‐
Viteza absolută a punctului P , simbolizată pp v , este rezultatul derivării absolute în raport cu
timpul a expresiei (6.60), după cum urmează:
0 nn p n n p
dp p r p rR
dt. (6.61)
În expresia anterioară, primul termen din membrul drept, n np v reprezintă viteza absolută a
originii sistemului n n n nO x y z n , exprimată mai sus prin (6.58). Al doilea termen, din membrul
drept al relaţiei (6.61), se determină conform cu expresia următoare:
00 0 0
p
n n np n p n p p n p n p p r
n
dr R r R r R r r v
dt t (6.62)
în care :
1, np pdacă r t şi 0, . n
p pdacă r cst (6.63)
iar
0 p
nn p rR r v
t (6.64)
exprimă viteza relativă a punctului P în mişcarea sa relativă faţă de nS , conform cu (6.63).
Ţinând seama de (6.62), (6.63), expresia (6.61) se rescrie sub forma finală:
p p pp n n p p r t p rv v r v v v (6.65)
şi caracterizează viteza absolută a punctului P condiţionată fiind de (6.63).
Prin derivarea expresiei (6.65) în raport cu timpul, rezultă acceleraţia absolută punctului P :
pp n n p n p p rv v r r v (6.66)
Se introduc următoarele notaţii:
, ; ;pn n p p n n p n p p rv a v a r r v . (6.67)
În aceeaşi expresie (6.66), termenul prv este echivalent cu:
2
002
p p p p
nnp
r n r n p n r rn
d rv v R r v aRdt tt (6.68)
unde
2
02
p
nn p rR r a
t (6.69)

MECANICĂ*N* NC.06. Mişcarea relativă a sistemelor de corpuri
‐ 113 ‐
vectorul Pr
v exprimând mişcarea relativă a punctului P faţă de sistemul n , iar Pr
a poartă
denumirea de acceleraţie liniară relativă a punctului P , mişcarea fiind condiţionată, prin P ,a unei
astfel de mişcări relative. Pe baza notaţiilor conţinute în (6.67), ţinând seama de (6.68), relaţia (6.66), se rescrie sub următoarea formă finală:
2 p p pp
n r r C rp n n p n n p p t pv a a aa a r r a (6.70)
şi reprezintă acceleraţia absolută a unui punct oarecare P , condiţionată fiind de (6.63).
Aşadar, expresiile(6.60), (6.65) şi (6.70), care au în vedere pe de o parte mişcarea de transport a
sistemului n n n nO x y z n , ataşat corpului nS , iar pe de altă parte mişcarea relativă, condiţionată
însă de (6.63), definesc într-o formă completă mişcarea absolută a unui punct P integrat în lanţul
cinematic al sistemului de corpuri , , , ,1 i nS S S , reprezentat în fig.6.1.

MECANICĂ*N* NC.07. Autoevaluare
‐ 114 ‐
Capitolul NB.07. Autoevaluare
Capitol NC.01. Cinematica mișcării absolute a punctului material
Exerciţii/ probleme rezolvate
1. Un punct are legea de mișcare tr 4 , t2 . Să se determine, în coordonate polare: traiectoria,
viteza, accelerația, caracterul mișcării, accelerația normală și accelerația tangențială. Pentru 8
t s
să se deseneze viteza și accelerația cu componentele lor.
Rezolvare:
Ecuaţia traiectoriei se obţine eliminând parametrul t între cele două ecuaţii parametrice ale
traiectoriei care formează şi legea de mişcare. Se obţine, din relaţia a doua, 2
t şi, înlocuind în
prima relaţie, rezultă:
2r ,
care este ecuaţia traiectoriei în coordonate polare sub formă explicită. Pentru trasarea ei prin puncte, se dau valori lui şi se calculează r :
0 12
6
4
3
2
4
3 …
r 0 6
3
2
3
2
2
3 …
Se desenează câte o semidreaptă pentru fiecare valoare a lui pe care, apoi, se măsoară r rezultând astfel poziția punctului pe traiectorie. Ulterior se unesc punctele, obţinându-se forma traiectoriei, așa cum se vede în fig.7.1.1.
Viteza punctului în coordonate polare este:
nn itiirirv 84 ,
iar acceleraţia sa în coordonate polare
nn iitirrirra 161622 .
Produsul scalar dintre v şi a are valoarea:
06412864 tttav ,
deci mişcarea este accelerată, punctul plecând din origine pe traiectorie fără a se mai întoarce.

MECANICĂ*N* NC.07. Autoevaluare
‐ 115 ‐
Pentru a obţine raza de curbură, calculăm mai întâi
z
zn
it
t
t
iii
av 212864
01616
084
,
apoi
2
323
12864
6416
t
t
av
v
.
Acceleraţia normală se calculează cu relația:
2
22
6416
12864
t
tva
,
iar acceleraţia tangenţială este:
22
22222
6416
64
6416
12864256256
t
t
t
ttaaa
,
relaţie care arată că mişcarea nu este uniform accelerată. Semnul acestei componente va fi pozitiv,
deoarece a şi v au acelaşi sens, v şi au acelaşi sens, deci a şi au acelaşi sens.
Pentru 8
t s, punctul are coordonatele polare
4
, 2
şi avem:
niiv 4 , niia 162 ,
2
2
16
264
a ,
216
8
a ,
4
a i
v
a
v
a
na
nv
ni
a
Fig.7.1.1. Traiectoria punctului x
y
O

MECANICĂ*N* NC.07. Autoevaluare
‐ 116 ‐
vectori reprezentați în fig.7.1.1.
Exerciţii/ probleme propuse spre rezolvare
1. Un punct material se mişcă după ecuaţiile parametrice în coordonate carteziene date mai jos
sttyttx 3;1;32 122 .
Se cere:
a) să se determine traiectoria şi să se reprezinte grafic în sistemul de axe utilizat;
b) să se determine expresiile vitezei şi acceleraţiei punctului la un moment oarecare t precum şi expresiile modulelor lor;
c) să se determine şi să se reprezinte poziţia, viteza şi acceleraţia punctului la momentul iniţial t=0 şi la momentul de timp t1 precizat.
Ce fel de mişcare are punctul material ?
Răspuns:
a) porţiunea din dreapta de ecuaţie y=x-2 corespunzătoare valorilor : x3, y1;
b) viteza: 22,22 tvtv yx ; acceleraţia: 2y
2x m/sam/sa 2,2 ;
c) la t=0: M0(3,1), 2y
2xyx m/sam/sa,m/svm/sv 2,22,2 0000 ;
la t1=3s: M1(18,16), 2y
2xyx m/sam/sa,m/svm/sv 2,28,8 1111 ;
Mişcarea este rectilinie uniform accelerată.
2. Un punct material se mişcă după ecuaţiile parametrice în coordonate carteziene date mai jos
sttytx 2;2cos1;cos 1 .
Se cere:
a) să se determine traiectoria şi să se reprezinte grafic în sistemul de axe utilizat;
b) să se determine expresiile vitezei şi acceleraţiei punctului la un moment oarecare t precum şi expresiile modulelor lor;
c) să se determine şi să se reprezinte poziţia, viteza şi acceleraţia punctului la momentul iniţial t=0 şi la momentul de timp t1 precizat.
Obervaţie: Se va ţine cont de domeniul de valori ale funcţiei trigonometrice cosinus.
Răspuns:
a) porţiunea din parabola de ecuaţie y=2x2 corespunzătoare valorilor: x[-1,1], y[0,2];

MECANICĂ*N* NC.07. Autoevaluare
‐ 117 ‐
b) viteza: tvtv yx 2sin2,sin ; accelerația: tata yx 2cos4,cos ;
c) la t=0: M0(1,2), 2y
2xyx m/sam/sa,m/svm/sv 4,10,0 0000 ;
la t1=(π/2)s: M1(0,0), 2y
2xyx m/sam/sa,m/svm/sv 4,00,1 1111 .
3. Un punct material se mişcă după ecuaţiile parametrice în coordonate carteziene date mai jos
sttytx 1;cos2;sin2 .
Se cere:
a) să se determine traiectoria şi să se reprezinte grafic în sistemul de axe utilizat;
b) să se determine expresiile vitezei şi acceleraţiei punctului la un moment oarecare t precum şi expresiile modulelor lor;
c) să se determine şi să se reprezinte poziţia, viteza şi acceleraţia punctului la momentul iniţial t=0 şi la momentul de timp t1 precizat.
Obervaţie: Este necesar să se ţină cont de domeniul de valori ale funcţiilor trigonometrice sin şi cos? De ce?
Răspuns:
a) cercul de ecuaţie 422 yx ;
b) viteza: tvtv yx sin2,cos2 ; accelerația: tata yx cos2,sin2 ;
c) la t=0: M0(0,2), 2y
2xyx m/sam/sa,m/svm/sv 2,00,2 0000 ;
la t1=(π)s: M1(0,-2), 2y
2xyx m/sam/sa,m/svm/sv 2,00,2 1111 .
4. Un punct material se mişcă după ecuaţiile parametrice în coordonate carteziene date mai jos
sttytx 2;3sin;1cos2 1 .
Se cere:
a) să se determine traiectoria şi să se reprezinte grafic în sistemul de axe utilizat;
b) să se determine expresiile vitezei şi acceleraţiei punctului la un moment oarecare t precum şi expresiile modulelor lor;
c) să se determine şi să se reprezinte poziţia, viteza şi acceleraţia punctului la momentul iniţial t=0 şi la momentul de timp t1 precizat.
Obervaţie: Este necesar să se ţină cont de domeniul de valori ale funcţiilor trigonometrice sin şi cos? De ce?

MECANICĂ*N* NC.07. Autoevaluare
‐ 118 ‐
Răspuns:
a) elipsa de ecuaţie 11
)3(
2
)1(2
2
2
2
yx, cu centrul în (1,3);
b) viteza: tvtv yx cos,sin2 ; acceleraţia: tata yx sin,cos2 ;
c) la t=0: M0(3,3), 2y
2xyx m/sam/sa,m/svm/sv 0,11,0 0000 ;
la t1=(π/2)s: M1(1,4), 2y
2xyx m/sam/sa,m/svm/sv 1,00,2 1111
5. Un punct material se mişcă după ecuaţiile parametrice în coordonate carteziene date mai jos
sttytx 43;cos;2cos 12 .
Se cere:
a) să se determine traiectoria şi să se reprezinte grafic în sistemul de axe utilizat;
b) să se determine expresiile vitezei şi acceleraţiei punctului la un moment oarecare t precum şi expresiile modulelor lor;
c) să se determine şi să se reprezinte poziţia, viteza şi acceleraţia punctului la momentul iniţial t=0 şi la momentul de timp t1 precizat.
Răspuns:
a) porţiunea din dreapta de ecuaţie x=2y-1 corespunzătoare valorilor : x[-1,1], y[0,1];
b) viteza: tvtv yx 2sin,2sin2 ; accelerația: tata yx 2cos2,2cos4 ;
c) la t=0: M0(1,1), 2y
2xyx m/sam/sa,m/svm/sv 2,40,0 0000 ;
la t1=(3π/4)s: M1(0,1/2), 2y
2xyx m/sam/sa,m/svm/sv 0,01,2 1111 .
Capitol NC.02. Mișcări particulare ale punctului material
Exerciţii/ probleme rezolvate Equation Chapter 1 Section 1
Rezolvare:

MECANICĂ*N* NC.07. Autoevaluare
‐ 119 ‐
Exerciţii/ probleme propuse spre rezolvare
1. Un punct material se mişcă după ecuaţiile parametrice în coordonate carteziene date mai jos
sttyttx 1;1;542 122 .
Se cere:
a) să se determine traiectoria şi să se reprezinte grafic în sistemul de axe utilizat;
b) să se determine expresiile vitezei şi acceleraţiei punctului la un moment oarecare t precum şi expresiile modulelor lor;
c) să se determine şi să se reprezinte poziţia, viteza şi acceleraţia punctului la momentul iniţial t=0 şi la momentul de timp t1 precizat.
Ce fel de mişcare are punctul material ?
Răspuns:
a) porţiunea din dreapta de ecuaţie x=2y+3 corespunzătoare valorilor : x3, y0;
b) viteza: 22,44 tvtv yx ; acceleraţia: 2y
2x m/sam/sa 2,4 ;
c) la t=0: M0(5,1), 2y
2xyx m/sam/sa,m/svm/sv 2,42,4 0000 ;
la t1=1s: M1(3,0), 2y
2xyx m/sam/sa,m/svm/sv 2,40,0 1111 .
Mişcarea este rectilinie uniform încetinită pentru x[3,5], y[0,1] iar apoi este uniform accelerată – este o mişcare cu întoarcere.
2. Se dă un cerc de rază R pe care se mişcă un punct material după legea de forma s=s(t) dată mai jos (se utilizează Sistemul Internaţional de unităţi de măsură).
54;4 2 tsmR
Se cere:
a) să se determine şi să se reprezinte viteza şi acceleraţia punctului (componentele în sistemul Frenet şi modulul);
b) să se determine viteza şi acceleraţia unghiulară;
c) să se determine valorile, vitezei, acceleraţiei, vitezei şi acceleraţiei unghiulare la momentul t1=1s.
Ce fel de mişcare are punctul material ?
Raspuns:
a) viteza şi acceleraţia sunt: 216,8,8 tam/ssatsv 2 ;

MECANICĂ*N* NC.07. Autoevaluare
‐ 120 ‐
b) viteza şi acceleraţia unghiulară sunt: 2rad/st 2,2 ; mişcarea este circulară uniform
accelerată;
c) la t1=1 s: 222 rad/srad/sm/sam/ssam/sv 2,2,16,8,8 ;
3. Se dă un cerc de rază R pe care se mişcă un punct material după legea de forma s=s(t) dată mai jos (se utilizează Sistemul Internaţional de unităţi de măsură).
sttsmR 1;1cos;2
Se cere:
a) să se determine şi să se reprezinte viteza şi acceleraţia punctului (componentele în sistemul Frenet şi modulul);
b) să se determine viteza şi acceleraţia unghiulară;
c) să se determine valorile, vitezei, acceleraţiei, vitezei şi acceleraţiei unghiulare la momentul t1=1s.
Ce fel de mişcare are punctul material ?
Raspuns:
a) viteza şi acc sunt: 2/sin,cos,sin 22 tatsatsv ;
b) viteza şi acceleraţia unghiulară sunt: 2/)cos(,2/)sin( tt ; Mişcarea punctului
material este circulară oscilatorie pe domeniul s[-π+1,π+1].
c) la t1= s: 222 rad/srad/sm/sam/ssam/sv 2/,0,0,)(,0 ;
Capitolul NC.04. Mişcări particulare ale rigidului
Exerciții/ probleme rezolvate
1. Se dă un sistem de bare articulate care se mişcă într-un plan fix (fig.7.4.1,a). Se cunosc
elementele geometrice: O1A = O2B = R , O2C = 1,5R, O1A∥O2C şi AB∥O1O2 , MAB, NO2C . Sistemul este pus în mişcare de bara O1A care se roteşte în jurul unei axe perpendiculare pe planul
mişcării şi care trece prin punctul O1 , cu viteza unghiulară 1 = εO t (εO = constant).
Se cer vitezele şi acceleraţiile punctelor A, B, C, M, N precum şi vitezele şi acceleraţiile unghiulare
ale barelor AB şi O2C respectiv, 2 , 3, ε2 , ε3 .
Rezolvare:
Rezolvarea problemei începe cu analiza mişcărilor corpurilor ce alcătuiesc sistemul dat. Astfel, corpul 1-bara O1A are mişcare de rotaţie (după cum s-a precizat chiar în enunţ), corpul 2-bara AB are mişcare de translaţie, deoarece (din datele geometrice) patrulaterul O1ABO2 este tot timpul un paralelogram, iar corpul 3-bara O2C are tot o mişcare de rotaţie, dar în jurul unei axe ce trece prin O2 .

MECANICĂ*N* NC.07. Autoevaluare
‐ 121 ‐
Studiul vitezelor porneşte de la punctul A situat pe un corp în mişcare de rotaţie. Ca urmare, viteza lui se calculează cu relaţia următoare rezultând:
,11 tRAOv OA
și are direcţia perpendiculară pe O1A şi sensul dat de ω (vezi figura 7.4.1,a).
Deoarece corpul 2 are mişcare de translaţie, punctul A aparţinând şi acestui corp, toate punctele lui au aceeaşi viteză (vezi paragraful NC.04.1.), anume:
.AMB vvv
Punctul B aparţinând şi corpului 3, care are mişcare de rotaţie, atât el cât şi punctele C şi N se bucură de proprietăţile precizate în paragraful NC.04.2. Astfel vitezele lor sunt proporţionale cu distanţele de la puncte la axa de rotaţie ce trece prin O2 , adică:
,222 NO
v
CO
v
BO
v NCB
de unde se obţin:
.
,5,15,15,1
2
2
2
2
BO
NOvv
vtRR
RtR
BO
COvv
BN
BOOBC
În plus, conform aceloraşi proprietăţi aceste viteze au vârfurile colineare (fig. 7.4.1,a).
În ceea ce priveşte vitezele unghiulare, pentru corpul 2 aceasta este zero deoarece mişcarea este de translaţie, respectiv,
ω2 = 0 .
Pentru corpul 3, viteza unghiulară se determină ştiind că punctul B aparţine şi acestuia care are o mişcare de rotaţie; rezultă:
.12
3
tR
tR
BO
vO
OB
Aa
Fig.7.4.1.
Nv
Cv
Bv Av Mv
O2
A B
O1
C
N
M
ω1 ω3
a)
Ca Ba
Aa
Aa
Ma Ba
Na
O2
A B
O1
C
N
M
ε1 ε3
φ φ
b)

MECANICĂ*N* NC.07. Autoevaluare
‐ 122 ‐
Sensul lui ω3 este dat de sensul vitezei punctului B (fig. 7.4.1,a).
În mod asemănător se face şi studiul acceleraţiilor. Acceleraţia punctului A se calculează plecând de la relaţia (4.10) şi utilizând expresiile componentelor acceleraţiei din mişcarea circulară a punctului material, astfel:
,22
121
1111
RtAOa
RAOAOaundeaaa
OA
OAAAA
de unde
42221 tRaaa OOAAA
şi tg φ .1
2tO
Componenta tangenţială a acceleraţiei este, ca şi viteza, perpendiculară pe O1A dar are sensul dat de ε1 , sens identic cu cel al lui ω1 , din cauza faptului că la derivare semnul valorii obţinute nu s-a modificat, iar componenta normală este orientată de-a lungul lui O1A, de la A către O1 (fig. 7.4.1,b). Acceleraţia punctului A este înclinată cu unghiul φ faţă de O1A.
Ca şi în cazul vitezelor, punctele A, M şi B au aceeaşi acceleraţie deoarece aparţin corpului 2 care are mişcare de translaţie, deci
.AMB aaa
Cum proprietăţile câmpului de acceleraţii sunt asemănătoare cu cel al câmpului de viteze pentru rigidul în mişcare de rotaţie, pentru aflarea acceleraţiilor punctelor C şi N se scrie relaţia:
,222 NO
a
CO
a
BO
a NCB
din care se obţin:
.
,5,115,15,1
1
2
2
4242
2
2
BO
NOaa
atRR
RtR
BO
COaa
BN
BOOOOBC
În plus , şi acceleraţiile au vârfurile colineare şi sunt înclinate cu acelaşi unghi φ , dar faţă de O2C, datorită paralelismului dintre corpurile 1 şi 3 (fig. 7.4.1, b).
Acceleraţia unghiulară a corpului 2 este zero deoarece mişcarea acestuia este de translaţie, respectiv,
ε2 = 0 .
Pentru corpul 3, acceleraţia unghiulară se determină ştiind că punctul B aparţine şi acestui corp care are o mişcare de rotaţie, iar acceleraţia lui tangenţială este egală cu aceea a punctului A. Rezultă:

MECANICĂ*N* NC.07. Autoevaluare
‐ 123 ‐
,12
3
OOB
R
R
BO
a
sensul lui ε3 fiind dat de sensul acceleraţiei tangenţiale a punctului B (fig. 7.4.1, b).
Observaţie: Problema scoate în evidenţă faptul că distribuţia de viteze şi de acceleraţii pentru un astfel de sistem de corpuri, la care mişcarea are loc într-un plan fix, se poate determina utilizând pe de-o parte proprietăţile distribuţiei de viteze şi acceleraţii din diferitele mişcări ale rigidului, iar pe de altă parte, relaţiile folosite în cinematica mişcării circulare a punctului material.
2. Se consideră o placă pătrată OABC, care are o
mişcare de rotaţie cu viteza unghiulară = 2t în jurul unei axe ce trece prin punctul O şi este perpendiculară pe planul în care are loc mişcarea (fig.7.4.2). Latura plăcii este OA = AB = b .
Se cere să se calculeze viteza şi acceleraţia punctului B.
Rezolvare:
Atât viteza cât şi acceleraţia punctului B se pot calcula fie utilizând relaţiile de la mişcarea circulară a punctului, deoarece acest punct descrie un cerc cu centrul în O şi de rază OB, fie utilizând relaţiile specifice distribuţiei de viteze şi acceleraţii din mişcarea de rotaţie a rigidului, respectiv (4.9) şi (4.12), (4.13).
a) Cu relaţiile din mişcarea circulară a punctului se obţin:
,22tbOBvB
OB şi cu sensul dat de ,
BBB aaa
unde
,//,24
,2222
OBladeorientatasiOBbtOBa
dedatsensulcusiOBbOBOBa
B
B
de unde
4224122 tbaaa BBB
şi tg φ .2
12t
Toate acestea sunt reprezentate în figura 7.4.2.
Bxv Bxa
Ba
Ba
Bv
Ba φ
A
B
O
C
Fig.7.4.2.
ω
ε
x
y
Oz
Byv
Bya

MECANICĂ*N* NC.07. Autoevaluare
‐ 124 ‐
b) Pentru a calcula viteza şi acceleraţia punctului B plecând de la relaţiile specifice mişcării de rotaţie a rigidului, se alege S.R.M. ataşat corpului în mişcare cu axa Ox în lungul laturei OA, axa Oy în lungul laturei OC iar axa Oz perpendiculară pe planul format de celelalte două şi sensul de ieşire
din acest plan (fig.7.4.2). Punctul C are coordonatele (b,b,0), iar vectorul are proiecţiile (0,0,) respectiv, (0,0,2t).
Viteza, calculată cu relaţia (4.7) este:
.
0
2
2
:,22
0
200
Bz
By
Bx
B
v
tbv
tbv
eproiectiilcujtbitb
bb
t
kji
OBv
Modulul vitezei este:
.22222 tbvvvv BzByBxB
Ştiind că srad /2 , rezultă că vectorul are aceeaşi direcţie şi acelaşi sens cu vectorul
, iar proiecţiile sale sunt (0,0,ε) respectiv, (0,0,2). Acceleraţia calculată cu relaţia (4.10) este:
,212212
022
200
0
200
22 jtbitb
tbtb
t
kji
bb
kji
OBOBaB
cu proiecţiile
0
212
2122
2
Bz
By
Bx
a
tba
tba
şi modulul .4122 4222 tbaaaa BzByBxB
Observaţii:
- modulele obţinute pentru viteză şi acceleraţie sunt aceleaşi prin oricare dintre cele două metode se face determinarea lor;
- pentru cazul prezentat, în care mişcarea are loc într-un plan fix, este mai comodă utilizarea relaţiilor folosite în cinematica mişcării circulare a punctului material;
- utilizarea relaţiilor folosite în cinematica rigidului scot în evidenţă sensurile vectorilor viteză şi acceleraţie în raport cu S.R.M.
3. Un cub de latură l execută mişcare de rotaţie cu viteza unghiulară t2 în jurul unei
diagonale a unei feţe ale sale. Să se determine vitezele şi acceleraţiile vârfurilor cubului.
Rezolvare:

MECANICĂ*N* NC.07. Autoevaluare
‐ 125 ‐
Fie O şi B vârfurile cubului care determină axa de rotaţie. Se alege sistemul de referinţă al cubului cu originea în punctul O şi axele orientate după laturile cubului care trec prin acest punct. Cu alegerea astfel făcută, coordonatele vârfurilor cubului sunt: )0;0;0(O ; )0;0;(bA ; )0;;( bbB ;
)0;;0( bC ; );0;( bbD ; );;( bbbE ; );;0( bbF ; );0;0( bG .
Fig. 7.4.3.
Viteza unghiulară a cubului este:
jtitOB
OB .
Acceleraţia unghiulară a cubului este:
jit
.
Deoarece punctele O şi B se află pe axa de rotaţie vor avea viteză şi acceleraţie nulă:
0ov ; 0Bv ; 0oa ; 0Ba .
Vitezele vârfurilor cubului se determină cu relaţia Euler:
rvv o .
Se obţine succesiv:
viteza punctului A:
kbtOAvv oA ;
btvA .
viteza punctului C:
kbtOCvv oC ;
btvC .
viteza punctului D:

MECANICĂ*N* NC.07. Autoevaluare
‐ 126 ‐
kbtjbtibtODvv oD ;
3btvD .
viteza punctului G:
jbtibtOGvv oG ;
2btvG .
viteza punctului F:
kbtjbtibtOFvv oF ;
3btvF .
viteza punctului E:
jbtibtOEvv oE ;
2btvE .
Acceleraţiile vârfurilor cubului se calculează cu relaţia Rivals:
rraa 0 .
Se oţine:
acceleraţia punctului A:
kbjbtibtOAOAaaA 220 ;
421 tbaA .
acceleraţia punctului C:
kbjbtibtOCOCaaC 220 ;
421 tbaC .
acceleraţia punctului D:
ktbjtbitbODODaaD222
0 2111 ;
463 tbaD .
acceleraţia punctului G:
kbtjbibOGOGaaG2
0 2 ;
442 tbaG .
acceleraţia punctului F:

MECANICĂ*N* NC.07. Autoevaluare
‐ 127 ‐
ktbjtbitbOFOFaaF222
0 2111 ;
463 tbaF .
acceleraţia punctului E:
kbtjbibOEOEaaE2
0 2 ;
442 tbaE .
4. Se consideră un sistem de bare articulate (mecanism) reprezentat în figura 7.4.4,a, şi cunoscut sub numele de mecanism bielă-manivelă. Acestuia i se cunosc elementele geometrice, respectiv lungimile barelor OA şi AB, poziţia la un moment dat descrisă de unghiul θ, precum şi viteza
unghiulară a elementului 1 – manivela, respectiv 1 = 0 = const.
Se cere să se determine distribuţia de viteze şi de acceleraţii cu ajutorul metodelor planului vitezelor şi planului acceleraţiilor.
Rezolvare:
Pentru început se numerotează elementele mecanismului (fig.7.4.4,a) şi se precizează mişcarea fiecăruia dintre ele, astfel:
1 – manivela are mişcare de rotaţie; 2 – biela are mişcare plan-paralelă; 3 – culisa are mişcare de translaţie de-a lungul direcţiei xx’.
Pentru aflarea distribuţiei de viteze, se calculează viteza punctului A ştiind că acesta aparţine unui corp în mişcare de rotaţie:
.01 OAOAvA
Direcţia ei este perpendiculară pe OA şi are sensul dat de 1 . Se reprezintă acestă viteză la o anumită scară, într-un plan numit planul vitezelor, cu originea în punctul numit polul vitezelor şi notat cu pv şi vârful într-un punct notat a (fig.7.4.4,b). Considerând scara vitezelor kv=1, rezultă
relaţia de echivalenţă Av vap .
Pentru determinarea vitezei punctului B se utilizează relaţia lui Euler pentru distribuţia de viteze la rigid în mişcare plan-paralelă (4.47),
ABxx
vvv BAAB
'
,

MECANICĂ*N* NC.07. Autoevaluare
‐ 128 ‐
în care s-a subliniat cu două linii vectorul complet cunoscut, Av , şi cu câte o linie vectorii parţial
cunoscuţi. La aceştia se ştiu direcţiile, care sunt precizate chiar sub ei, necunoscându-se modulele lor. Relaţia anterioară, care este o ecuaţie vectorială ale cărei necunoscute sunt chiar mărimile acestor vectori, se rezolvă grafic în figura 7.4.4,b. Prin punctul a, vârful vitezei lui A, se duce în
care s-a subliniat cu două linii vectorul complet cunoscut, Av , şi cu câte o linie vectorii parţial
cunoscuţi. La aceştia se ştiu direcţiile, care sunt precizate chiar sub ei, necunoscându-se modulele lor. Relaţia anterioară, care este o ecuaţie vectorială ale cărei necunoscute sunt chiar mărimile acestor vectori, se rezolvă grafic în figura 7.4.4,b. Prin punctul a, vârful vitezei lui A, se duce
direcţia vitezei lui B faţă de A ca şi când acesta ar fi fix iar B s-ar roti faţă de el, respectiv o perpendiculară pe AB. Apoi, prin polul vitezelor se duce direcţia vitezei lui B, şi anume o paralelă la xx’. În punctul b în care se intersectează aceste două drepte se închide poligonul vectorilor
rezultând Bv vbp şi respectiv BAvab .
Pentru aflarea vitezei unghiulare a corpului 2, se reprezintă pe mecanismul iniţial (fig. 7.4.4,a)
viteza BAv obţinută din planul vitezelor (fig7.4.4,b), şi se deduce astfel sensul ei, mărimea fiind
dată de relaţia:
.2 AB
vBA
Distribuţia de acceleraţii se determină în mod asemănător. Se calculează pentru început, acceleraţia punctului A, ştiind că acesta aparţine corpului 1, care are mişcare de rotaţie:
x x’ O
B
A
θ
ω1= ω0
a) BAv
BAa
ε2
ω2
pv
b
a
// xx’
AB
b) c)
pa b’
a’
// xx’
AB
n
Fig. 7.4.4.
1
2
3
x x’ O
B
A
θ
ω1= ω0
a) BAv
BAa
ε2
ω2
pv
b
a
// xx’
AB
b) c)
pa b’
a’
// xx’
AB
n
Fig. 7.4.4.
1
2
3

MECANICĂ*N* NC.07. Autoevaluare
‐ 129 ‐
,
020
21
1
OAOAa
OAaundeaaa
A
AAAA
unde acceleraţia normală este dirijată de-a lungul lui OA şi orientată de la A către O. Considerând
ka=1, scara acceleraţiilor, se reprezintă în planul acceleraţiilor acceleraţia apaa aAA , cu
originea în punctul pa, polul acceleraţiilor (fig. 7.4.4,c).
Pentru aflarea acceleraţiei punctului B se utilizează relaţia (4.70), care dă distribuţia de acceleraţii la rigid în mişcare plan-paralelă, respectiv:
ABxx
aaaa BABAAB
'
,
în care, la fel ca şi în cazul vitezelor, s-au subliniat cu două linii vectorii complet cunoscuţi şi cu o linie vectorii ai căror module nu se ştiu, dar se ştiu direcţiile. Ecuaţia vectorială de mai sus se rezolvă grafic în planul acceleraţiilor (fig. 7.4.4,c), după ce se calculează acceleraţia normală a punctului B faţă de A, ca şi când acesta ar fi fix iar B s-ar roti faţă de el. Se obţine:
,2
AB
va BA
BA
cu direcţia paralelă cu AB şi sensul de la B către A. Aceasta se reprezintă la aceeaşi scară în planul acceleraţiilor, cu originea în punctul a’ şi vârful într-un punct n. Prin acest punct se duce apoi
direcţia perpendiculară pe AB a vectorului BAa .
În continuare prin polul acceleraţiilor se duce direcţia paralelă la xx’ a vectorului Ba . Punctul de
intersecţie al acestor două direcţii se notează cu b’ şi reprezintă vârful acceleraţiei lui B din planul
acceleraţiilor. Se închide în acest fel poligonul vectorilor (aici acceleraţii) obţinându-se: Bv abp
şi respectiv BAabn (fig. 7.4.4,c).
Acceleraţia unghiulară a elementului 2 se calculează cu ajutorul acceleraţiei tangenţiale a lui B faţă de A, respectiv:
,2 AB
aBA
şi are sensul dat de BAa care în prealabil a fost
reprezentată în punctul B (fig. 7.4.4,a).
În felul acesta se determină distribuţia de viteze şi acceleraţii cu metoda planului vitezelor şi a planului acceleraţiilor.
(l,0,0)A B(l,l,0)
C
O1≡O
x
y
Fig.7.4.5.
z
D
E G(l,l,2l)
H
z1

MECANICĂ*N* NC.07. Autoevaluare
‐ 130 ‐
Exerciții / probleme propuse spre rezolvare
1. Se dă un paralelipiped dreptunghic OABCDEGH de dimensiuni OA=OC=l şi OD=2l, care are o mişcare de rotaţie în jurul unei axe (Δ) dirijată de-a lungul diagonalei OG (fig.7.4.5) , cu viteza
unghiulară 5tO (εO = constant) .
Se cer: vitezele şi acceleraţiile punctelor A şi B.
Răspuns:
,2 ktljtlv OOA ;5tlv OA
,22 jtlitlv OOB .22 tlv OB
,21)2(5 2222 ktljtlitla OOOOOA
.4)21(2)21(2 2222 ktljtlitla OOOOOB
2. Se dă o bară AB de lungime l, al cărei capăt A se reazemă în interiorul unui canal semicircular de rază R. Totodată, bara se reazemă într-un punct D pe marginea canalului (fig.7.4.6). Mișcarea
capătului A se face cu o viteză vA=v0=const.
Se cer: a) distribuția de viteze; b) baza și rostogolitoarea; c) distribuția de accelerații.
Fig.7.4.6.
θ
ω
aD

MECANICĂ*N* NC.07. Autoevaluare
‐ 131 ‐
Răspuns și indicații: Reprezentările din figură se consideră ca fiind și indicații de rezolvare. Ca parametru al mișcării se ia unghiul θ dintre bară și planul orizontal.
a) IA=2R, R
v
20 , sinsin2 0vRvD , cos44
2220 RllR
R
vIBvB ;
b) Baza este cercul mic din figura 7.4.6. a cărui ecuație este: 221
21 R , iar rostogolitoarea este
cercul mare din figură, a cărui euație este: 222 4R .
c) JA=4R, 0 , R
vJAaA
202 , 1sin3
22
202 R
vJDaD ,
cos8164
222
202 RllR
R
vJBaB
3. Se dă o bară AB de lungime l, care se reazemă într-un punct C pe o curbă semicirculară de rază R. Capătul A al barei, rezemat pe planul orizontal ca în figura 7.4.7, se mișcă având viteza
vA=v0=const.
Se cer: a) distribuția de viteze; b) baza și rostogolitoarea.
Fig. 7.4.7.
Răspuns și indicații: Reprezentările din figură se consideră ca fiind și indicații de rezolvare. Ca parametru al mișcării se ia unghiul θ dintre bară și planul orizontal.
a)
2sin
cosRIA ,
cos
sin20
R
v , cos0vICvC ;
b) Alegâd sistemele de referință fix și mobil ca în figura 7.4.7, se obține ecuația bazei:
)( 221
21
21
2 RR și respectiv ecuația rostogolitoarei : R
2 , aceasta fiind ecuația unei

MECANICĂ*N* NC.07. Autoevaluare
‐ 132 ‐
parabole care are vârful în A și axa de simetrie Ax (în realitate rostogolitoare este numai o ramură a parabolei).
4. Se dă sistemul de bare articulate din figura 7.4.8, pentru care se cunosc dimensiunile barelor, poziţia instantanee a acestuia şi mişcarea elementului conducător prin viteza sa unghiulară ω1 = constant.
Fig. 7.4.8.
Se cer:
a) Distribuţia de viteze cu metoda centrului instantaneu de rotaţie (se vor indica pe desen vitezele punctelor mecanismului şi vitezele unghiulare ale elementelor).
b) Distribuţia de viteze cu metoda ecuaţiilor vectoriale şi a planului vitezelor (se vor scrie ecuaţiile şi se vor rezolva grafic).
c) Distribuţia de acceleraţii cu metoda ecuaţiilor vectoriale şi a planului acceleraţiilor (se vor scrie ecuaţiile şi se vor rezolva grafic).
5. Se dă sistemul de bare articulate din figura 7.4.9, pentru care se cunosc dimensiunile barelor, poziţia instantanee a acestuia şi mişcarea elementului conducător prin viteza sa unghiulară ω1 = constant.
Fig. 7.4.9.
Se cer:
O1 O3
A B
C
D
1
2
3
4
5
ω1
x’ x
A
2
3
4
1
5
B
ω1
O3
O5
O1
C

MECANICĂ*N* NC.07. Autoevaluare
‐ 133 ‐
d) Distribuţia de viteze cu metoda centrului instantaneu de rotaţie (se vor indica pe desen vitezele punctelor mecanismului şi vitezele unghiulare ale elementelor).
e) Distribuţia de viteze cu metoda ecuaţiilor vectoriale şi a planului vitezelor (se vor scrie ecuaţiile şi se vor rezolva grafic).
f) Distribuţia de acceleraţii cu metoda ecuaţiilor vectoriale şi a planului acceleraţiilor (se vor scrie ecuaţiile şi se vor rezolva grafic).
5. Se dă sistemul de bare articulate din figura 7.4.10, pentru care se cunosc dimensiunile barelor, poziţia instantanee a acestuia şi mişcarea elementului conducător prin viteza sa unghiulară ω = constant.
Fig. 7.4.10.
Se cer:
g) Distribuţia de viteze cu metoda centrului instantaneu de rotaţie (se vor indica pe desen vitezele punctelor mecanismului şi vitezele unghiulare ale elementelor).
h) Distribuţia de viteze cu metoda ecuaţiilor vectoriale şi a planului vitezelor (se vor scrie ecuaţiile şi se vor rezolva grafic).
i) Distribuţia de acceleraţii cu metoda ecuaţiilor vectoriale şi a planului acceleraţiilor (se vor scrie ecuaţiile şi se vor rezolva grafic).
Întrebări/ chestiuni recapitulative 1. Care sunt particularitățile mișcării de translație a rigidului?
2. Enumerați propietățile distribuției de viteze a rigidului în mișcare generală.
3. Definiți mișcarea de rotație a rigidului și precizați care sunt particularitățile ei.
4. Definiți mișcarea de plan-paralelă a rigidului și precizați care sunt particularitățile ei.
5. Definiți centrul instantaneu de rotație și precizați care sunt proprietățile lui.
6. Cum se determină distribuția de viteze la rigidul aflat în mișcare plan-paralelă?
7. Definiți centrul accelerațiilor și explicați modul de determinare a distribuției de accelerații la rigidul aflat în mișcare plan-paralelă
1
5
4
3
2
ω D
O3B
A
O1
x’x
C

MECANICĂ*N* NC.07. Autoevaluare
‐ 134 ‐
8. Explicați semnificația unghiurilor lui Euler.
9. Definiți mișcarea rigidului cu punct fix și precizați care sunt particularitățile ei.
10. Cum se determină distribuția de viteze și accelerații la rigidul cu punct fix?
Capitol NC.05. Studiul cinematic al mişcării relative a punctului material
Exerciţii/ probleme rezolvate Equation Chapter 1 Section 1
1. Cursorul M se deplasează pe cadrul circular de rază R cu viteza constantă u. În acelaşi timp cadrul având sudată în B, tija de lungime R se roteşte în jurul unei axe perpendiculare pe planul său
şi care trece prin punctul O1 cu viteza unghiulară constantă, (fig.7.5.1).
Se cer viteza absolută ( av ) şi acceleraţia absolută ( aa ) ale cursorului M în poziţia A.
Rezolvare:
Mişcarea relativă este reprezentată de mişcarea cursorului pe cercul de rază R :
vr = u .
În mişcarea de transport, cursorul M descrie o mişcare circulară cu centrul în O1 şi raza O1A :
5v 1 RAOt ,
tra vvv ;
În triunghiul OAO1 :
5
2sin
5cos
R
RR
R
.
Rezultă cos222trtra vvvvv
RuRuva 25 222 ,
şi este reprezentată în prima dintre cele două figuri 7.5.1.
Pentru compunerea acceleraţiilor se utilizează relaţia:
ctra aaaa
Acceleraţia relativă are numai componentă normală:
R
u
R
vaa r
rr
22
Acceleraţia de transport are de asemenea numai componentă normală:
521
2 RAOaa tt
Fig.7.5.1.

MECANICĂ*N* NC.07. Autoevaluare
‐ 135 ‐
Acceleraţia Coriolis are expresia vectorială:
rtc va 2 ,
iar mărimea ei este: uuac 22
sin2
Acceleraţiile sunt reprezentate în cea de-a doua figură 7.5.1.
Pentru compunerea lor s-au dus două direcţii ortogonale Ax şi Ay şi s-au determinat componentele acceleraţiei absolute pe cele două axe:
uRR
uaaaa ctrax 2
5
15cos 2
2 ,
5
25sin 2 Raa tay ,
2222222 22/ RuRRuaaa ayaxa .
2. Se dau: un cadru dreptunghiular OABC, cu OA = BC = d ; pe latura AB se deplasează un cursor
M, după legea x = 3t2 . Cadrul se roteşte în jurul laturii OC, cu = (t) şi = const. (fig.7.5.2,a).
Se cere să se determine viteza absolută va şi acceleraţia absolută aa, pentru cursorul M la un
moment dat.
Rezolvare:
Studiul vitezelor:
tra vvv .
Dar txvr 6 ,
dtRvt .
a) b) c)
Fig.7.5.2.

MECANICĂ*N* NC.07. Autoevaluare
‐ 136 ‐
Deoarece sunt perpendiculare între ele (fig.7.5.2,b) rezultă:
22tra vvv 2236 dtva .
Studiul acceleraţiilor:
ctra aaaa ,
unde: 6 xar m/s2 ,
dtRat222 şi dRat ,
iar rtc va 2 ,
dar cum 0|| cr av .
Ţinând cont de faptul că acceleraţia absolută are proiecţiile (fig.7.5.2,c):
dtaa tax22 ,
6 ray aa ,
daa taz ,
rezultă:
222azayaxa aaaa 22244 36 ddtaa .
3. Se dau: un cadru circular de rază R, cu o articulaţie fixă în O1 ; pe cadru se deplasează mobilul M.
Se cunosc vitezele unghiulare 1 = 20 şi 2=0 (0 = const.).
Se cer: va şi aa pentru mobilul M când ∢21
OMO (fig.7.5.3,a).
Rezolvare:
Studiul vitezelor:
tra vvv ,
unde: RRvr 02 ,
22 011 RMOvt ,
şi au direcţiile şi sensurile din figura 7.5.3,a. Rezultă:
cos222trtra vvvvv ,
respectiv,

MECANICĂ*N* NC.07. Autoevaluare
‐ 137 ‐
oa RRRv 135cos248 22
022
022
0 50Rva .
Studiul acceleraţiilor:
ctra aaaa ,
unde: RRaa rr2
02
2 ,
24 201
21 RMOaa tt ,
rrtc vva 122 RRac2
02
0 42
sin4 .
Pentru compunerea acceleraţiilor se aleg două direcţii ortogonale Mx şi My (fig.10.5,b), obţinându-se:
Raaaa ctrax2
04cos
,
Raa tay2
044
sin ,
1720
22 Raaa ayaxa .
Exerciţii/ probleme propuse spre rezolvare
1. Se dau: un disc de rază R, aflat într-o mişcare de rotaţie cu viteza unghiulară = const. şi un mobil ce se deplasează pe periferia sa cu viteza u = const. (fig.7.5.4).
Se cer: av şi aa ale mobilului M la un moment dat. Ce se întâmplă în cazul în care u = R ?
Răspuns:
Fig.7.5.3.
b)a)

MECANICĂ*N* NC.07. Autoevaluare
‐ 138 ‐
Ţinând cont de direcţiile şi sensurile vitezelor reprezentate în
fig.7.5.4, rezultă: uRva iar pentru
0 avRu .
Luând în considerare direcţiile şi sensurile acceleraţiilor din fig. 7.5.4 se obţine:
uRR
uaaaa ctra 22
2 ,
iar dacă
02 222 RRRaRu a .
2. Se dă un cadru în formă de L pe care se mișcă un punct material M după legea s (fig.7.5.5.). Cadrul are o mișcare
de rotaţie cu viteza unghiulară = 3t în jurul unei axe perpendiculare pe planul său.
Se cer: av şi aa ale punctului material M la un moment
dat (cu reprezentarea vitezelor și accelerațiilor).
Răspuns:
tvr 2 , 423 ttvt , OM
OMvvvvv trtra
022 2 .
2/2 smar , 4229 ttat , 423 tat , 212tac ,
OM
MMa
OM
OMaaa ttrax
00 ,
OM
MMa
OM
OMaaa ttcay
00 , 22ayaxa aaa .
Observație: axele pe care se proiectează accelerațiile se aleg paralele cu brațele cadrului și cu originea în M.
3. Un cadru circular de rază R este sudat de un ax vertical. Corpul astfel format are o mișcare de rotație în jurul axei verticale iar pe cadrul circular se mișcă un punct material M, aflat la momentul studiat în poziția din figura 7.5.6. Se cunosc vitezele unghiulare cu care se rotesc atât corpul cât și punctul material (fig. 7.5.6).
Se cer: av şi aa ale punctului material M la momentul
Fig.7.5.4.
O
M0
M
OM0= ℓ
ω=3t
s=t2
Fig. 7.5.5.
R
O
ω0 > 0 M
ω2= 2t
ω1= 3ω0= const.
Fig. 7.5.6.

MECANICĂ*N* NC.07. Autoevaluare
‐ 139 ‐
corespunzător poziției din figură (cu reprezentarea vitezelor și accelerațiilor).
Răspuns:
220 49 tRva , .
Rar209 , 24Rtat , Rat 2 , Rtac 012 , 222 )( cttra aaaaa .
4. Se dă o bară orizontală sudată de un ax vertical. Corpul astfel format are o mișcare de rotație în jurul axei verticale iar pe bara orizontală se mișcă un punct material M după o lege s ca în figura 7.5.7. Se cunosc viteza unghiulară cu care se rotește corpul cât și legea de mișcare a punctului material (fig. 7.5.7).
Se cer: av şi aa ale punctului material M la un moment dat (cu
reprezentarea vitezelor și accelerațiilor).
Răspuns:
34 tvr , )32(3 2 tttvt , 22tra vvv .
2/4 smar , )32(9 22 tttat , )32(3 2 ttat , )34(6 ttac ,
22 )()( tctra aaaaa .
Întrebări/ chestiuni recapitulative
1. Definiți mișcarea relativă și mișcarea de transport.
2. Care este legea de compunere a vitezelor ? explicați mărimile care intervin în ea.
3. Care este legea de compunere a accelerațiilor ? explicați mărimile care intervin în ea.
4. Ce este accelerația complementară Coriolis?
A
B
O
s=2t2+3t
M
ω= 3t
Fig. 7.5.7.

MECANICĂ*N* NC. CINEMATICĂ
‐ 140 ‐
Bibliografie
[A01] Anton, R., Probleme de mecanica, Ed. Didactică şi Pedagogică, Bucuresti, 1978.
[A02] Appel, P., Traité de mécanique rationelle, Gautier - Villars, Paris, 1955.
[A03] Ardema M. D., Newton-Euler Dynamics, Springer, New York, 2005.
[A04] Arnold, V., Méthodes mathématique de la mécanique classique, Editura Mir, Moscova, 1976.
[A05] Atanasiu M., Mecanica, Editura didactică și pedagogică, București, 1973.
[B01] Bălan, Şt., Complemente de mecanică teoretică, Editura Didactică şi Pedagogică, Bucureşti, 1979.
[B02] Banach, St., Mechanics, Monografie Matematyczne,Warszawa-Wroclaw, 1951.
[B03] Beatty M. F. Jr., Principles of Engineering Mechanics. Kinematics-The Geometry of Motion, Plenum Press, New York, 1986.
[B04] Beer F. P., Russell J. E., Clausen W. E., Vector Mechanics for Engineers. Statics, 8th edition, McGraw Hill, New York, 2007.
[B05] Beju, I., Soos, E., Teodorescu, P.P., Tehnici de calcul tensorial Euclidian cu aplicaţii, Editura Tehnică, Bucureşti, 1977.
[B06] Bolcu, D., Marin, M., Mecanică, Editura Universitaria, Craiova, 2003.
[B07] Bolcu, D., Rizescu, S., Mecanica – Vol. I, Editura Didactică şi Pedagogică, Bucureşti, 2009
[B08] Bolcu, D., Tarnita, Metode de analiza cinetostatică a mecanismelor plane, Editura Didactică şi Pedagogică, Bucureşti, 2009
[B09] Bratu, P., Mecanică teoretică, Editura Impuls, ISBN 973-8132-57-6, Bucureşti, 2006.
[B010] Brouwer, D., Clemence, G.M., Methods of Celestial Mechanics, Academic Press, New York and London, 1961.
[B011] Buchholtz, N.N., Voronkov, I.M., Minakov, I.A., Culegere de probleme de mecanică raţională, Ed. Tehnică, Bucureşti, 1951.
[C01] Constantinescu I., Bolog C., Mecanică, Editura didactică și pedagogică, București, 1978.
[C02] Ceaușu V., Enescu N., Probleme de mecanică, vol. I și II, Editura Corifeu, București, 2004.
[D01] Dragos, L., Principiile mecanicii analitice, Ed. Tehnică, Bucureşti, 1976.
[D02] Dubosin,G.,N., Nebesnaia mehanica, Moskva, 1968.
[E01]Enescu N., Carp-Ciocârdia D. C., Predoi M.V., Savu M. – Mecanica pentru ingineri din profilul electric, Editura MATRIX-ROM, Bucureşti, 2000
[F01] Föppl, A., Vorlesungen uber technische Mechanik, Bd 1,11 ,IV,VI 1921-1933.

MECANICĂ*N* NC. CINEMATICĂ
‐ 141 ‐
[G01] Geyling, F.T., Westerman, H.R., Introduction to Orbital Mechanics, Addison-Wesley Publishing Company, Massachusetts, London, Ontario,1971.
[G02] Gross. D, Hauger W., Schröder J., Wall W. A., Rajapakse N., Engineering Mechanics 1. Statics, Springer – Verlag Berlin Heidelberg, 2009.
[H01] Hagedorn, P., Technische Mechanik. Vol I-III Verlag H , Deutsche Frankfurt am Main, 1989-1990.
[H02] Hamel, G., Theoretische Mechanik. Springer Verlag , Berlin , Gottingen. Heidelberg, 1949.
[H03] Hangan S., Slătinenu I., Mecanică, Editura didactică și pedagogică, București, 1983.
[H04] Higdon, A., Stiles, W., Davis, A., Evces, Ch., Engineering Mechanics. Prentice Hall Inc. Englewood Cliffs, New Jersey, 1976.
[H05] Hibbeler R. C., Engineering mechanics. Dynamics, 11th edition, Pearson Prentice Hall, New Jersey, 2007.
[I01] Iacob, C., Mecanica teoretica, Ed. Didactică şi Pedagogică, Bucureşti, 1980.
[I02] Ibănescu R., Rusu E., Mecanică. Cinematică, Editura Cermi, Iași, 1998.
[I03] Ioachimescu, A., Mecanica rationala, Biblioteca Gazetei Matematice, Imprimeria Naţională, Bucureşti, 1947.
[I04] Ispas, V., Negrean, I., s.a. Mecanică, Ed. Dacia, ISBN 973-35-06-97-4, Cluj-Napoca, 1997.
[K01] Kittel C., Knight W. D., Ruderman M. A., Cursul de fizică Berkley, vol I, Mecanică, Editura didactică și pedagogică, București, 1981.
[L01] Levi-Civita, T. , Ugo, A., Lezioni di meccanica razionale, Vol I Bologna 1922, Vol II Bologna 1927.
[L02] Loiţianskii, L., Laurie, A.I., Kurs teoreticeskoi mehaniki, vol I, II Gostehnizdat, Moskva, 1955.
[L03] Love, A.E.H., Theoretical Mechanics. 2-nd ed. Cambridge, 1921.
[M01] Mangeron D., Irimiciuc N., Mecanica rigidelor cu aplicații în inginerie. Mecanica rigidului, Editura tehnică, București, 1978.
[M02] Manolescu, N., Kovacs, F., Orănescu, A., Teoria mecanismelor şi maşinilor, Editura Didactică şi Pedagogică, Bucureşti, 1972.
[M03] Mc.Gill, D., King, W., Engineering Mechanics; Statics and an Introduction to Dynamics, P.W.S. Engineering, Boston, 1985.
[M04] Meirovitch, L., Methods of Analytical Dynamics, Mc.Graw-Hill, N.Y., 1970 .
[M05] Mechtcherski, I., Recueil de problemes de mecanique rationelle. Ed Mir Moscou 1973,
[M06] Meriam J. L., Kraige L. G., Engineering Mechanics. Dynamics, 6th edition, John Wiley &Sons, New Jersey, 2007.
[M07] Morin D., Introductory Classical mechanics With Problems and Solutions, Cambridge University Press, 2008.

MECANICĂ*N* NC. CINEMATICĂ
‐ 142 ‐
[N01] Negrean, I., Mecanică Avansată în Robotică, Ed. UT PRESS, ISBN 978-973-662-420-9, Cluj-Napoca, 2008.
[N02] Negrean, I, Vuşcan, I, Haiduc, N, Robotică. Modelarea cinematică şi dinamică, Editura Didactică şi Pedagogică R.A., Bucureşti, 1997.
[N03] Negrean, I., et al, Robotics - Kinematic and Dynamic Modelling, Editura Didactică şi Pedagogică R.A., ISBN 973-30-5958-7, Bucharest, 1998.
[N04] Negrean, I., Cinematica şi Dinamica Roboţilor-Modelare-Experiment-Precizie, Editura Didactică şi Pedagogică R.A., ISBN 973-30-9301-7, Bucureşti, 1999.
[N05] Negrean, I., Kinematics and Dynamics of Robots-Modelling-Experiment-Accuracy, Editura Didactică şi Pedagogică R.A., ISBN 973-30-9313-0, Bucharest, 1999
[N06] Negrean, I., Mecanică. Teorie şi Aplicaţii, Ed. UT PRESS, ISBN 978-973-662-523-7, Cluj-Napoca, 2012.
[N07] Newton, I., Principiile matematice ale filosofiei naturale (transl. from English), Ed. Academiei R.P.R. 1956
[N08] Nita, M.,M., Curs de mecanica teoretica, Academia militara, Bucuresti, 1972.
[O01] Onicescu, O., Mecanica, Ed. Didactică şi Pedagogică, Bucureşti, 1969.
[P01] Pandrea, N., Elemente de mecanica solidelor în coordonate plückeriene, Ed. Academiei Române, Bucureşti, 2000.
[P02] Pelecudi, Ch., Precizia mecanismelor, Editura Academiei Române, Bucureşti, 1975.
[P03] Posea, N., ş.a., Mecanică aplicată pentru ingineri, Editura Tehnică, Bucureşti, 1984.
[P04] Pytel A., Kinsalaas J., Engineering Mechanics. Dynamics, 3th edition, Cengage Learning, Canada, 2010.
[R01] Rădoi M., Deciu E., Mecanica, Editura didactică și pedagogică, București, 1977.
[R02] Ripianu A., Popescu P., Bălan B., Mecanică tehnică, Editura didactică și pedagogică, București, 1982.
[R03] Rizescu S., Bolcu D., Mecanica,vol II, Ed. Universitaria, Craiova, 2009.
[R04] Roșca I., Ion C., Curs de Mecanică. Cinematica-dinamica, IPB, 1981.
[R05] Roy, M., Mécanique. Corps rigides. Dunod Paris, 1965.
[R06] Ruina A., Pratap R., Introduction to Statics and Dynamics, Oxford University Press, 2011.
[S01] Shigley, J.E., Simulation of Mechanical systems; An Introduction. Mc.Graw-Hill Book Company. New York. 1957.
[S02] Silaș G., Groșanu I., Mecanica, Editura didactică și pedagogică, București, 1981.
[S03] Staicu Șt., Introducere în mecanica teoretică, Editura ștințifică și enciclopedică, București, 1983.
[S04] Staicu, Şt., Aplicaţii ale calcului matriceal în mecanica solidelor, Editura Academiei Române, Bucureşti, 1986.

MECANICĂ*N* NC. CINEMATICĂ
‐ 143 ‐
[S05] Staicu Șt., Mecanică teoretică, Editura didactică și pedagogică, București, 1998.
[S06] Stan, A., Grumazescu, M., Probleme de mecanica Ed. Didactică şi Pedagogică, Bucureşti, ed. 111,1973.
[S07] Stoenescu Al., Ripianu, A., Culegere de probleme de mecanică teoretică, 1965.
[S08] Stoenescu, A., Silaş, Gh., Mecanica teoretica. ed. III, Ed. Didactică şi Pedagogică, Bucureşti, 1969.
[S09] I.Stroe, Culegere de probleme. Mecanica, IPB, 1991.
[S010] I.Stroe, Mecanica, Cinematica, Teorie si probleme, UPB, 1995.
[S011] I.Stroe, D.Caruntu, V.Iliescu, L.Radcenco, A.Alecu, A.Craifaleanu, C.Dragomirescu, C.D.Carp-Ciocardia, M.Boiangiu, Probleme de cinematică pentru studenţii din învăţământul superior tehnic, Editura PRINTECH, 2000.
[T01] Târnita, D., Bolcu, D., Metode de analiza cinematica a mecanismelor plane, Editura Didactica si Pedagogica, Bucuresti, 2005.
[T02] Teodorescu P. P., Sisteme mecanice. Modele clasice, vol. 1, Editura tehnică, București, 1984.
[T03] Tocaci E., Mecanica, Editura didactică și pedagogică, București, 1985.
[U01] Ursu-Fischer, N., Ursu, M., Complemente de matematici cu aplicații în inginerie, Casa Cărții de Știință, ISBN: 978-973-133-728-9, Cluj-Napoca, 2010.
[V01] Vâlcovici,V., Bălan, S., Mecanică teoretică, Ediția a 2-a. Editura Tehnică, București, 1963.
[V02] Voinea, R.,P., Stroe, I.,V., Predoi, M.,V., Technical Mechanics, Geometry Balkan Press, Bucharest, 1996.
[V03] Voinea, R.,P., Stroe, I.,V., Predoi, M.,V., Technical Mechanics, Editura Politehnica Press, Bucuresti, 2010, reeditare in 2012.
[V04] Voinea, R.P., Stroe, I., Introducere în teoria sistemelor dinamice, Editura Academiei Române, Bucureşti, 2000.
[V05] Voinea R., Voiculescu D., Ceaușu V., Mecanica, Editura didactică și pedagogică, București, 1983.
[V06] Voinea R., Voiculescu D., Simion F. P., Introducere în mecanica rigidului cu aplicații în inginerie, Editura Academiei Republicii Socialiste România, București, 1989.