(MUX) este un bloc - iota.ee.tuiasi.roiota.ee.tuiasi.ro/~sam/pdf/SAMcurs2.pdf · MOSFET Q. 4-Q. 5,...
30
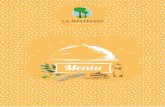
1 SISTEME AUTOMATE DE MĂSURĂ CURS NR.2 Prof.Dr.Ing. Cristian Zet Sisteme de achiziţii de date Un multiplexor analogic (MUX) este un bloc funcţional cu n intrări şi o ieşire care la un moment dat permite transmiterea la ieşire doar a semnalului de la una din intrări. Din punct de vedere fizic, multiplexoarele analogice sunt constituite dintr-un număr egal cu 2 n (2, 4, 8, 16) comutatoare analogice conectate şi comandate în mod adecvat. Selecţia canalelor se realizează cu un cod numeric, aplicat la intrările unui decodificator, DEC, prin intermediul unui circuit de comandă, COM. Comanda se face prin semnale digitale compatibile TTL sau CMOS. multiplexor analogic – schema bloc multiplexor analogic CMOS Comutatorul propriu-zis este format din tranzistoarele MOSFET Q 4 -Q 5 , unul cu canal p şi celălalt cu canal n, conectate în paralel şi comandate în antifază.
Transcript of (MUX) este un bloc - iota.ee.tuiasi.roiota.ee.tuiasi.ro/~sam/pdf/SAMcurs2.pdf · MOSFET Q. 4-Q. 5,...
1
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
Un multiplexor analogic (MUX) este un bloc funcţional cu n intrări şi o ieşire care laun moment dat permite transmiterea la ieşire doar a semnalului de la una din intrări.
Din punct de vedere fizic, multiplexoarele analogice sunt constituite dintr-un număregal cu 2n (2, 4, 8, 16) comutatoare analogice conectate şi comandate în mod adecvat.Selecţia canalelor se realizează cu un cod numeric, aplicat la intrările unuidecodificator, DEC, prin intermediul unui circuit de comandă, COM. Comanda se faceprin semnale digitale compatibile TTL sau CMOS.
multiplexor analogic – schema bloc multiplexor analogic CMOSComutatorul propriu-zis este format din tranzistoarele MOSFET Q4-Q5, unul cu canal pşi celălalt cu canal n, conectate în paralel şi comandate în antifază.
2
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
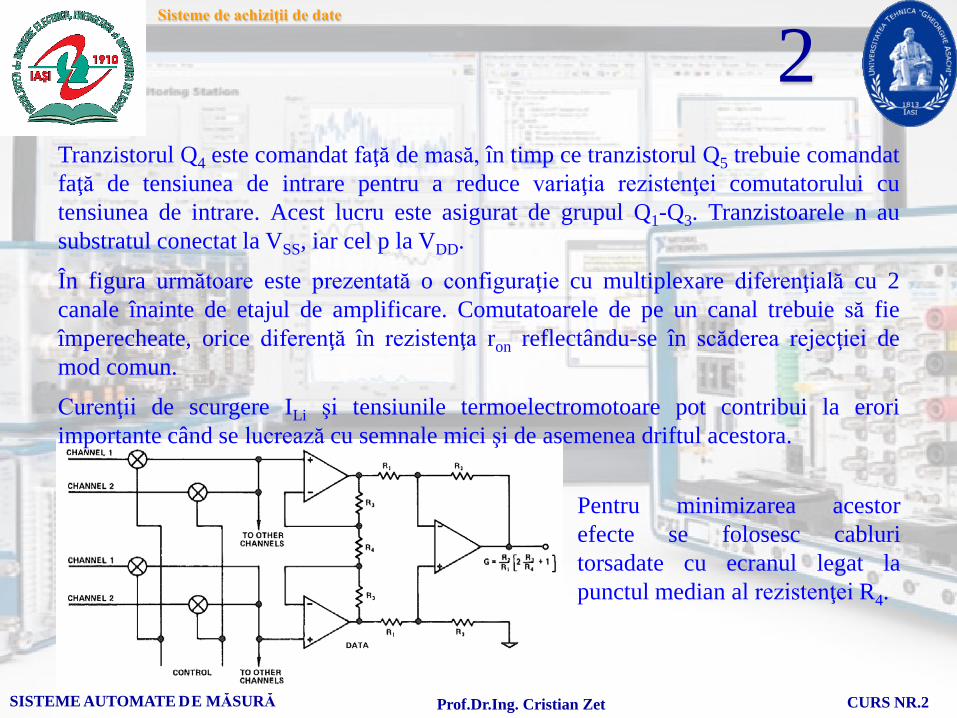
Tranzistorul Q4 este comandat faţă de masă, în timp ce tranzistorul Q5 trebuie comandatfaţă de tensiunea de intrare pentru a reduce variaţia rezistenţei comutatorului cutensiunea de intrare. Acest lucru este asigurat de grupul Q1-Q3. Tranzistoarele n ausubstratul conectat la VSS, iar cel p la VDD.
În figura următoare este prezentată o configuraţie cu multiplexare diferenţială cu 2canale înainte de etajul de amplificare. Comutatoarele de pe un canal trebuie să fieîmperecheate, orice diferenţă în rezistenţa ron reflectându-se în scăderea rejecţiei demod comun.
Curenţii de scurgere ILi şi tensiunile termoelectromotoare pot contribui la eroriimportante când se lucrează cu semnale mici şi de asemenea driftul acestora.
Pentru minimizarea acestorefecte se folosesc cabluritorsadate cu ecranul legat lapunctul median al rezistenţei R4.
3
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
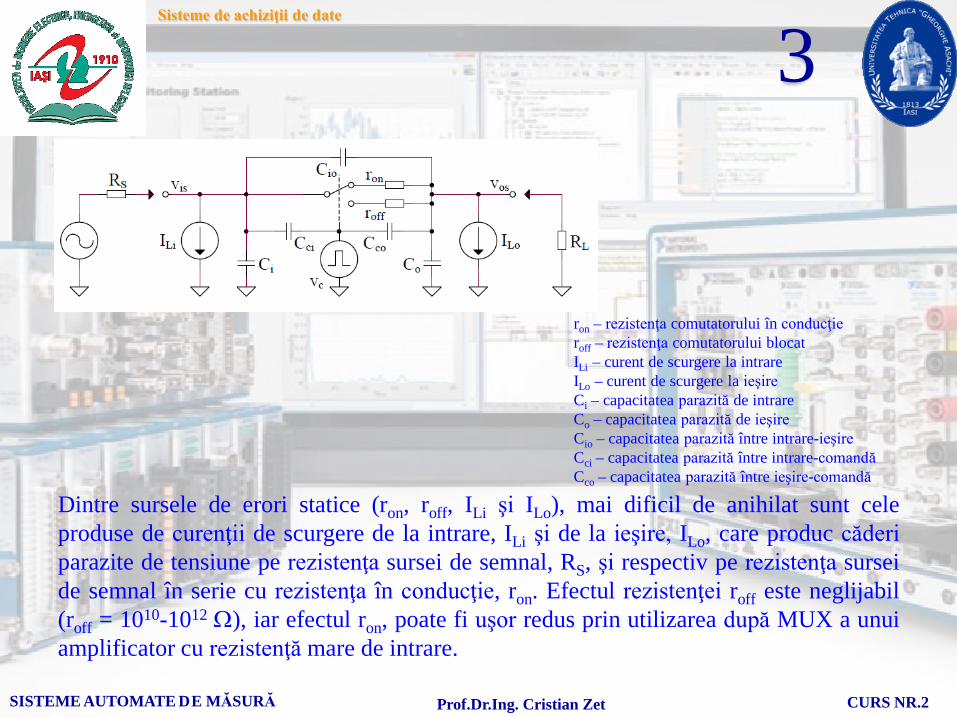
Dintre sursele de erori statice (ron, roff, ILi şi ILo), mai dificil de anihilat sunt celeproduse de curenţii de scurgere de la intrare, ILi şi de la ieşire, ILo, care produc căderiparazite de tensiune pe rezistenţa sursei de semnal, RS, şi respectiv pe rezistenţa surseide semnal în serie cu rezistenţa în conducţie, ron. Efectul rezistenţei roff este neglijabil(roff = 1010-1012 Ω), iar efectul ron, poate fi uşor redus prin utilizarea după MUX a unuiamplificator cu rezistenţă mare de intrare.
ron – rezistenţa comutatorului în conducţieroff – rezistenţa comutatorului blocatILi – curent de scurgere la intrareILo – curent de scurgere la ieşireCi – capacitatea parazită de intrareCo – capacitatea parazită de ieşireCio – capacitatea parazită între intrare-ieşireCci – capacitatea parazită între intrare-comandăCco – capacitatea parazită între ieşire-comandă
4
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
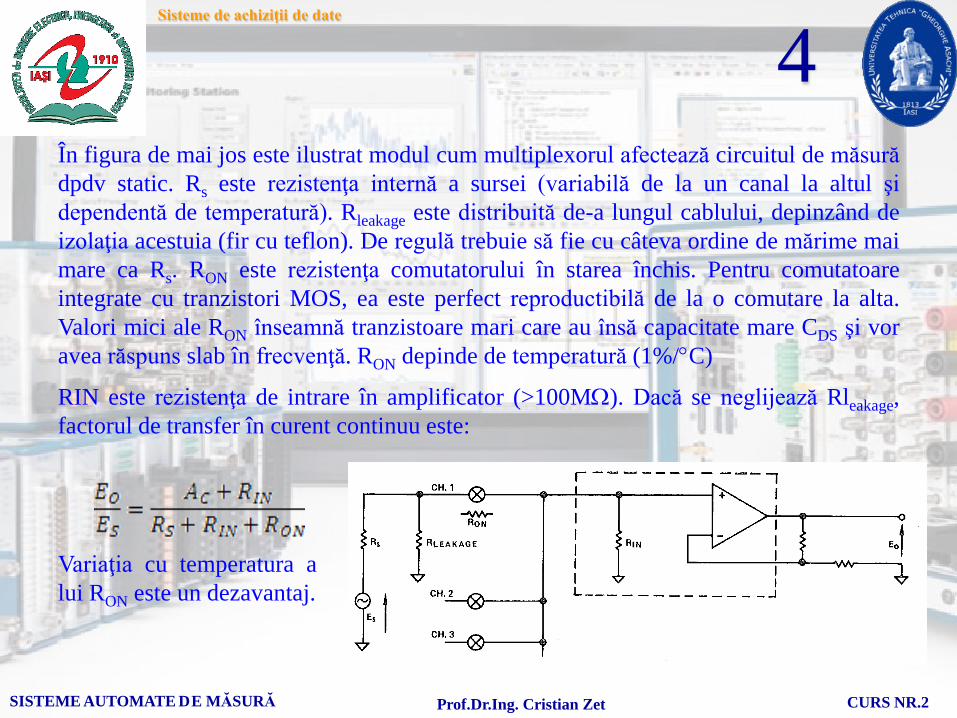
În figura de mai jos este ilustrat modul cum multiplexorul afectează circuitul de măsurădpdv static. Rs este rezistenţa internă a sursei (variabilă de la un canal la altul şidependentă de temperatură). Rleakage este distribuită de-a lungul cablului, depinzând deizolaţia acestuia (fir cu teflon). De regulă trebuie să fie cu câteva ordine de mărime maimare ca Rs. RON este rezistenţa comutatorului în starea închis. Pentru comutatoareintegrate cu tranzistori MOS, ea este perfect reproductibilă de la o comutare la alta.Valori mici ale RON înseamnă tranzistoare mari care au însă capacitate mare CDS şi voravea răspuns slab în frecvenţă. RON depinde de temperatură (1%/°C)
RIN este rezistenţa de intrare în amplificator (>100MΩ). Dacă se neglijează Rleakage,factorul de transfer în curent continuu este:
Variaţia cu temperatura alui RON este un dezavantaj.
5
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
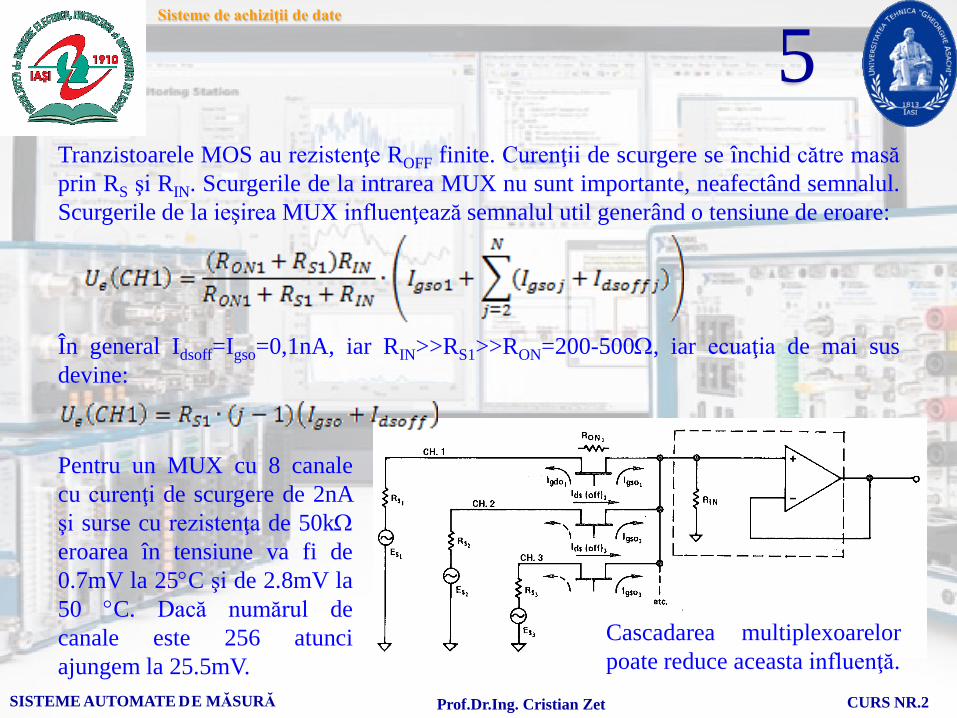
Tranzistoarele MOS au rezistenţe ROFF finite. Curenţii de scurgere se închid către masăprin RS şi RIN. Scurgerile de la intrarea MUX nu sunt importante, neafectând semnalul.Scurgerile de la ieşirea MUX influenţează semnalul util generând o tensiune de eroare:
În general Idsoff=Igso=0,1nA, iar RIN>>RS1>>RON=200-500Ω, iar ecuaţia de mai susdevine:
Pentru un MUX cu 8 canalecu curenţi de scurgere de 2nAşi surse cu rezistenţa de 50kΩeroarea în tensiune va fi de0.7mV la 25°C şi de 2.8mV la50 °C. Dacă numărul decanale este 256 atunciajungem la 25.5mV.
Cascadarea multiplexoarelorpoate reduce aceasta influenţă.
6
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
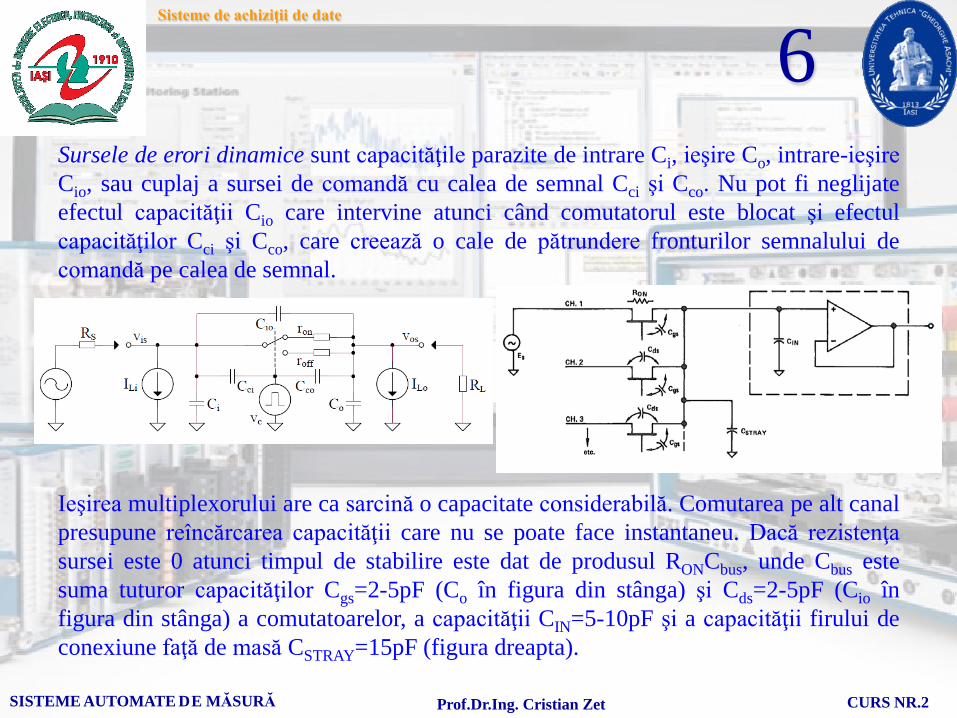
Sursele de erori dinamice sunt capacităţile parazite de intrare Ci, ieşire Co, intrare-ieşireCio, sau cuplaj a sursei de comandă cu calea de semnal Cci şi Cco. Nu pot fi neglijateefectul capacităţii Cio care intervine atunci când comutatorul este blocat şi efectulcapacităţilor Cci şi Cco, care creează o cale de pătrundere fronturilor semnalului decomandă pe calea de semnal.
Ieşirea multiplexorului are ca sarcină o capacitate considerabilă. Comutarea pe alt canalpresupune reîncărcarea capacităţii care nu se poate face instantaneu. Dacă rezistenţasursei este 0 atunci timpul de stabilire este dat de produsul RONCbus, unde Cbus estesuma tuturor capacităţilor Cgs=2-5pF (Co în figura din stânga) şi Cds=2-5pF (Cio înfigura din stânga) a comutatoarelor, a capacităţii CIN=5-10pF şi a capacităţii firului deconexiune faţă de masă CSTRAY=15pF (figura dreapta).
7
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
Pentru un multiplexor 1:8 capacitatea Cbus poate ajunge între 36–65pF. Pentru orezistenţă RON=500Ω rezultă o constantă de timp de 18-34ns. Timpul de stabilireajunge în acest caz (până la 0.01%) 9.2⋅τ=0.165-0.31µs, ceea ce limitează viteza decomutare.
Dacă rezistenţa RS este considerabilă atunci timpul de stabilire poate fi influenţat de 2constante de timp.
Injecţia inversă: de fiecare dată când comutatorul este acţionat, o parte din semnalul decomandă este injectat inductiv şi capacitiv în calea de semnal. Căile responsabilepentru asta sunt Cgd şi Cgs ale comutatorului. De fiecare dată când comutatorul esteacţionat o cantitate de sarcină VC(Cgd+Cgs) este injectată în intrarea şi ieşirea MUX.Sarcina se descarcă prin rezistenţa RON şi prin RS. Când RS=0 efectul este un şpiţ scurtdupă comutare. Şpiţul constă într-o treaptă iniţială VC(Cgd+Cgs)/Cbus şi o descreştereexponenţială cu constanta RONCbus. Ca efect rezultă lungirea timpului de stabilire aamplificatorului.Dacă rezistenţa RS este mare atunci treapta iniţială de tensiune va fi mai micăVC(Cgd+Cgs)/(Cbus +Cline), dar descreşterea va fi mai mare RS(Cbus+Cline). Ca efectrezultă o micşorare a perioadei de eşantionare. Cline este capacitatea liniei de legăturăîntre sursa de semnal şi multiplexor.
8
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
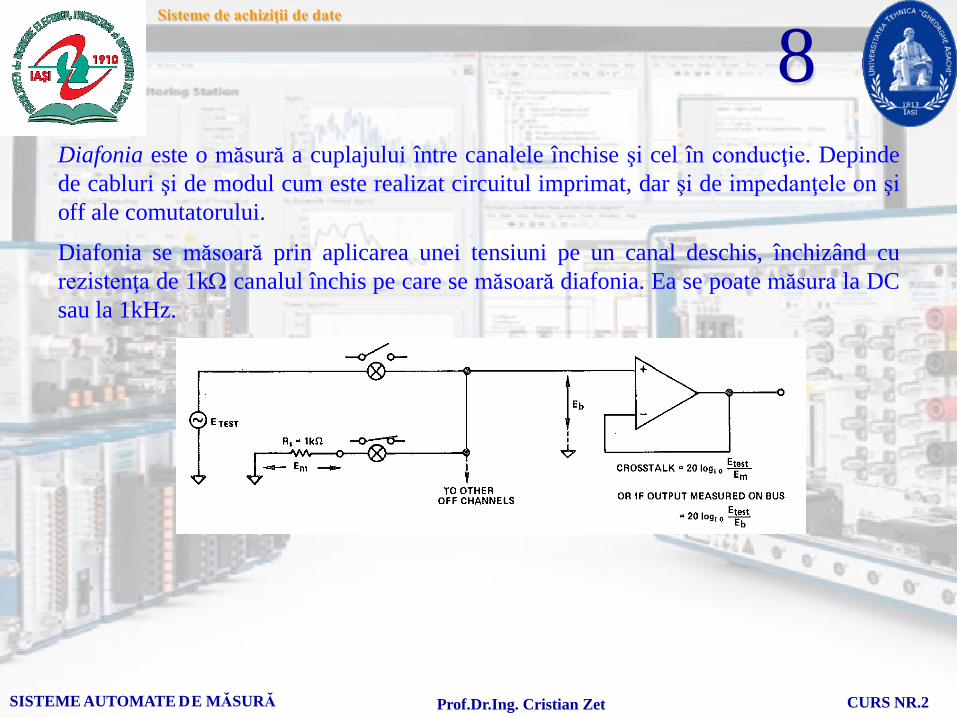
Diafonia este o măsură a cuplajului între canalele închise şi cel în conducţie. Depindede cabluri şi de modul cum este realizat circuitul imprimat, dar şi de impedanţele on şioff ale comutatorului.
Diafonia se măsoară prin aplicarea unei tensiuni pe un canal deschis, închizând curezistenţa de 1kΩ canalul închis pe care se măsoară diafonia. Ea se poate măsura la DCsau la 1kHz.
9
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
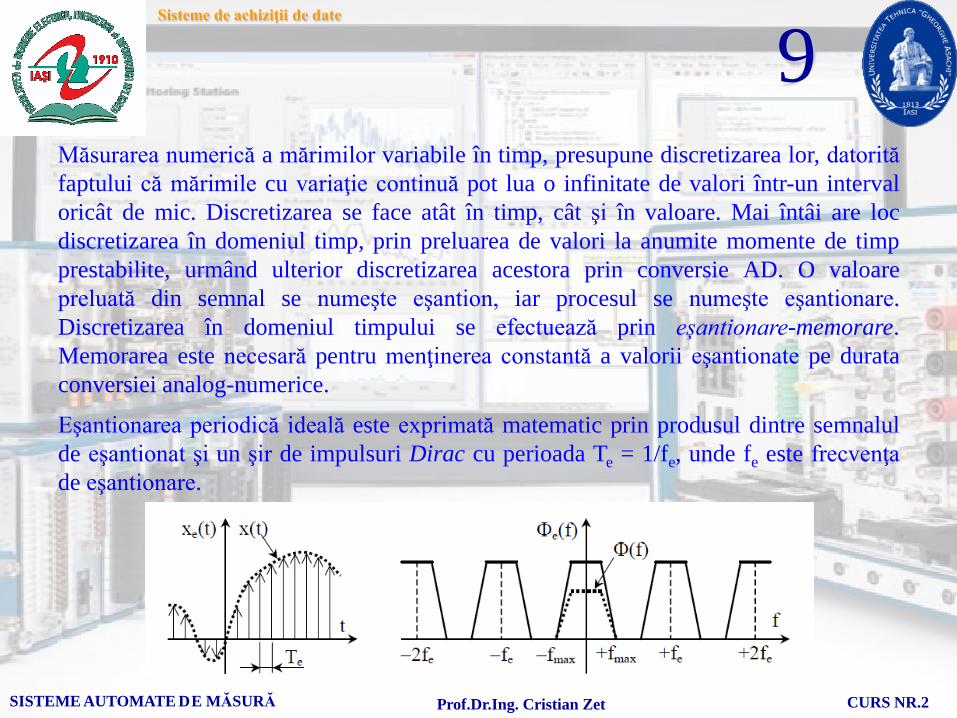
Măsurarea numerică a mărimilor variabile în timp, presupune discretizarea lor, datorităfaptului că mărimile cu variaţie continuă pot lua o infinitate de valori într-un intervaloricât de mic. Discretizarea se face atât în timp, cât şi în valoare. Mai întâi are locdiscretizarea în domeniul timp, prin preluarea de valori la anumite momente de timpprestabilite, urmând ulterior discretizarea acestora prin conversie AD. O valoarepreluată din semnal se numeşte eşantion, iar procesul se numeşte eşantionare.Discretizarea în domeniul timpului se efectuează prin eşantionare-memorare.Memorarea este necesară pentru menţinerea constantă a valorii eşantionate pe durataconversiei analog-numerice.
Eşantionarea periodică ideală este exprimată matematic prin produsul dintre semnalulde eşantionat şi un şir de impulsuri Dirac cu perioada Te = 1/fe, unde fe este frecvenţade eşantionare.
10
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
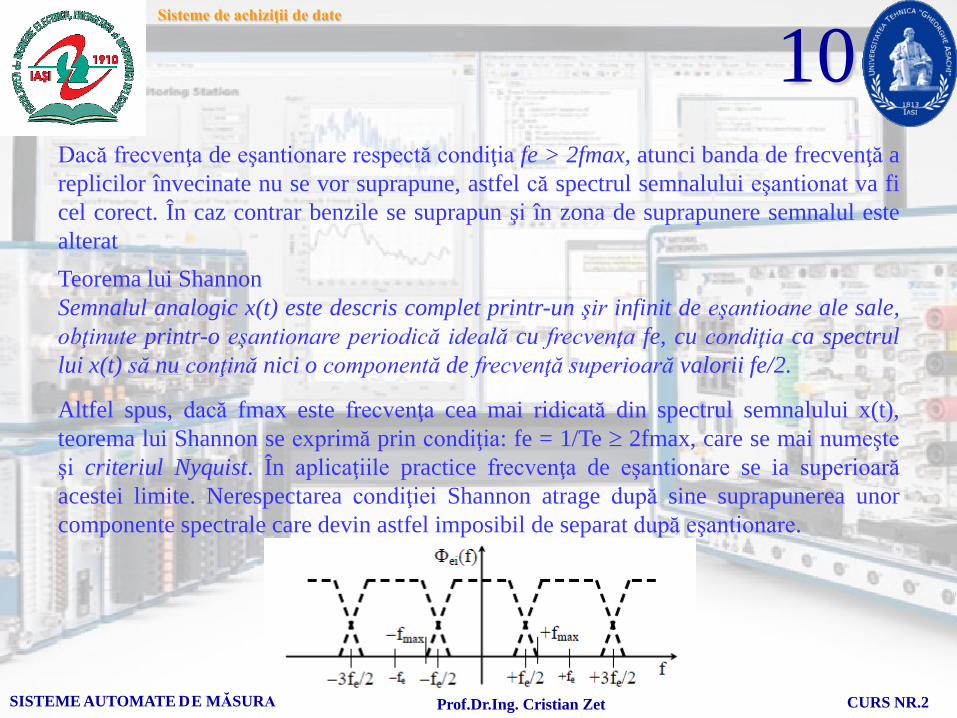
Dacă frecvenţa de eşantionare respectă condiţia fe > 2fmax, atunci banda de frecvenţă areplicilor învecinate nu se vor suprapune, astfel că spectrul semnalului eşantionat va ficel corect. În caz contrar benzile se suprapun şi în zona de suprapunere semnalul estealteratTeorema lui ShannonSemnalul analogic x(t) este descris complet printr-un şir infinit de eşantioane ale sale,obţinute printr-o eşantionare periodică ideală cu frecvenţa fe, cu condiţia ca spectrullui x(t) să nu conţină nici o componentă de frecvenţă superioară valorii fe/2.
Altfel spus, dacă fmax este frecvenţa cea mai ridicată din spectrul semnalului x(t),teorema lui Shannon se exprimă prin condiţia: fe = 1/Te ≥ 2fmax, care se mai numeşteşi criteriul Nyquist. În aplicaţiile practice frecvenţa de eşantionare se ia superioarăacestei limite. Nerespectarea condiţiei Shannon atrage după sine suprapunerea unorcomponente spectrale care devin astfel imposibil de separat după eşantionare.
11
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
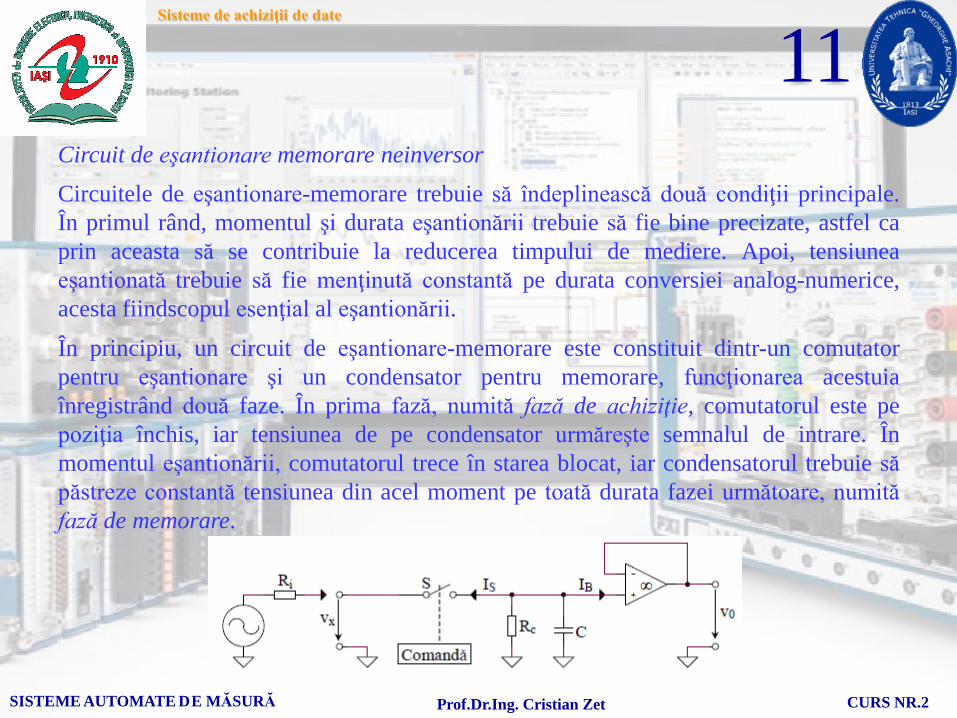
Circuit de eşantionare memorare neinversorCircuitele de eşantionare-memorare trebuie să îndeplinească două condiţii principale.În primul rând, momentul şi durata eşantionării trebuie să fie bine precizate, astfel caprin aceasta să se contribuie la reducerea timpului de mediere. Apoi, tensiuneaeşantionată trebuie să fie menţinută constantă pe durata conversiei analog-numerice,acesta fiindscopul esenţial al eşantionării.
În principiu, un circuit de eşantionare-memorare este constituit dintr-un comutatorpentru eşantionare şi un condensator pentru memorare, funcţionarea acestuiaînregistrând două faze. În prima fază, numită fază de achiziţie, comutatorul este pepoziţia închis, iar tensiunea de pe condensator urmăreşte semnalul de intrare. Înmomentul eşantionării, comutatorul trece în starea blocat, iar condensatorul trebuie săpăstreze constantă tensiunea din acel moment pe toată durata fazei următoare, numităfază de memorare.
12
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
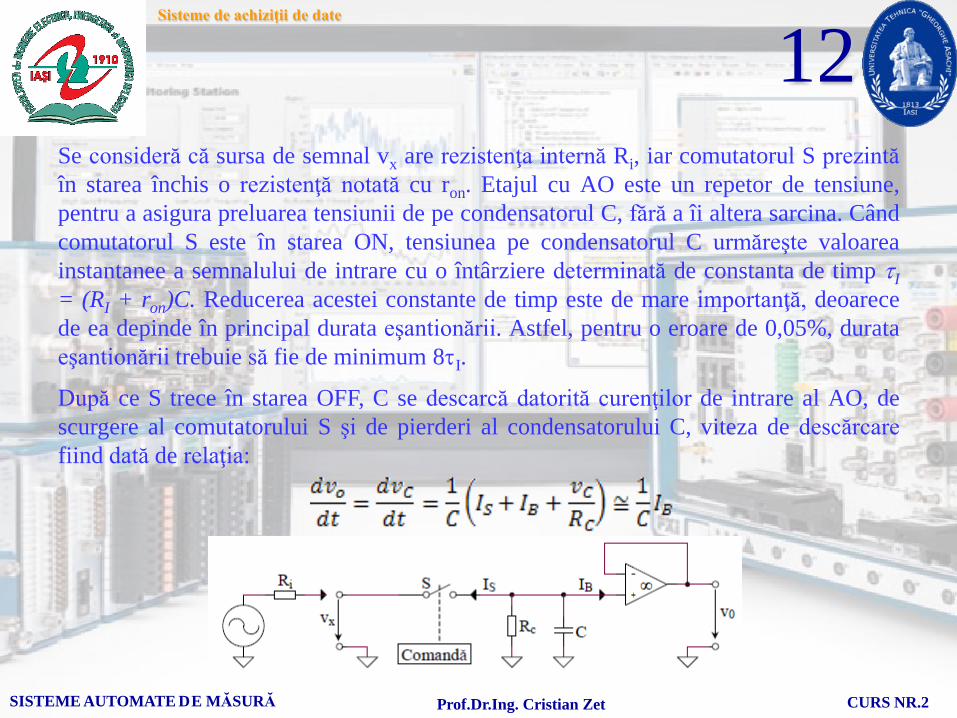
Se consideră că sursa de semnal vx are rezistenţa internă Ri, iar comutatorul S prezintăîn starea închis o rezistenţă notată cu ron. Etajul cu AO este un repetor de tensiune,pentru a asigura preluarea tensiunii de pe condensatorul C, fără a îi altera sarcina. Cândcomutatorul S este în starea ON, tensiunea pe condensatorul C urmăreşte valoareainstantanee a semnalului de intrare cu o întârziere determinată de constanta de timp τI= (RI + ron)C. Reducerea acestei constante de timp este de mare importanţă, deoarecede ea depinde în principal durata eşantionării. Astfel, pentru o eroare de 0,05%, durataeşantionării trebuie să fie de minimum 8τI.
După ce S trece în starea OFF, C se descarcă datorită curenţilor de intrare al AO, descurgere al comutatorului S şi de pierderi al condensatorului C, viteza de descărcarefiind dată de relaţia:
13
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
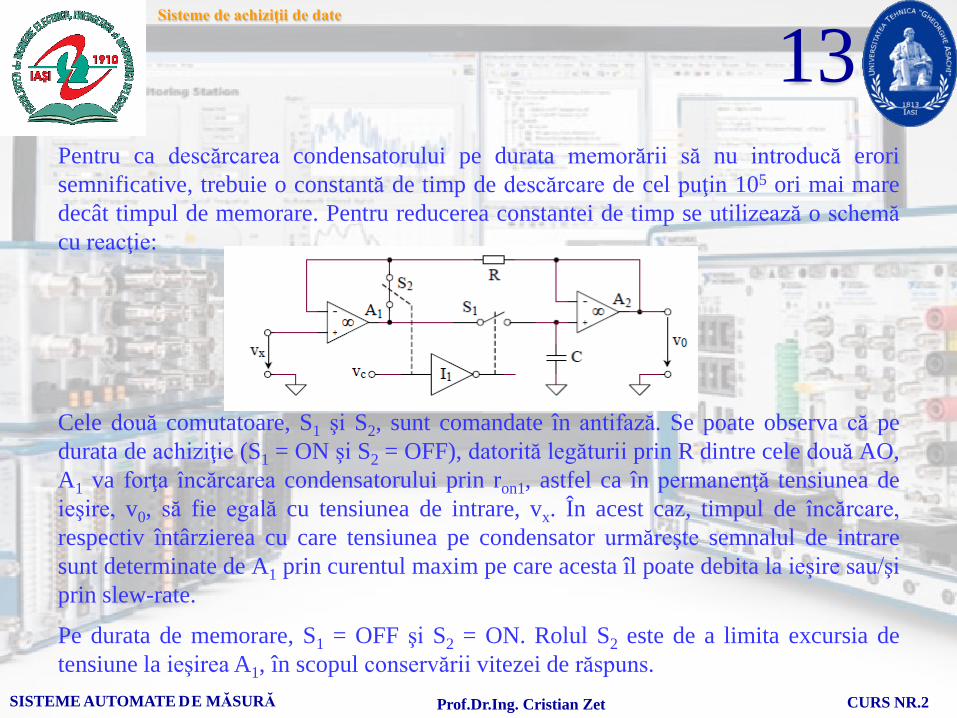
Pentru ca descărcarea condensatorului pe durata memorării să nu introducă erorisemnificative, trebuie o constantă de timp de descărcare de cel puţin 105 ori mai maredecât timpul de memorare. Pentru reducerea constantei de timp se utilizează o schemăcu reacţie:
Cele două comutatoare, S1 şi S2, sunt comandate în antifază. Se poate observa că pedurata de achiziţie (S1 = ON şi S2 = OFF), datorită legăturii prin R dintre cele două AO,A1 va forţa încărcarea condensatorului prin ron1, astfel ca în permanenţă tensiunea deieşire, v0, să fie egală cu tensiunea de intrare, vx. În acest caz, timpul de încărcare,respectiv întârzierea cu care tensiunea pe condensator urmăreşte semnalul de intraresunt determinate de A1 prin curentul maxim pe care acesta îl poate debita la ieşire sau/şiprin slew-rate.
Pe durata de memorare, S1 = OFF şi S2 = ON. Rolul S2 este de a limita excursia detensiune la ieşirea A1, în scopul conservării vitezei de răspuns.
14
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
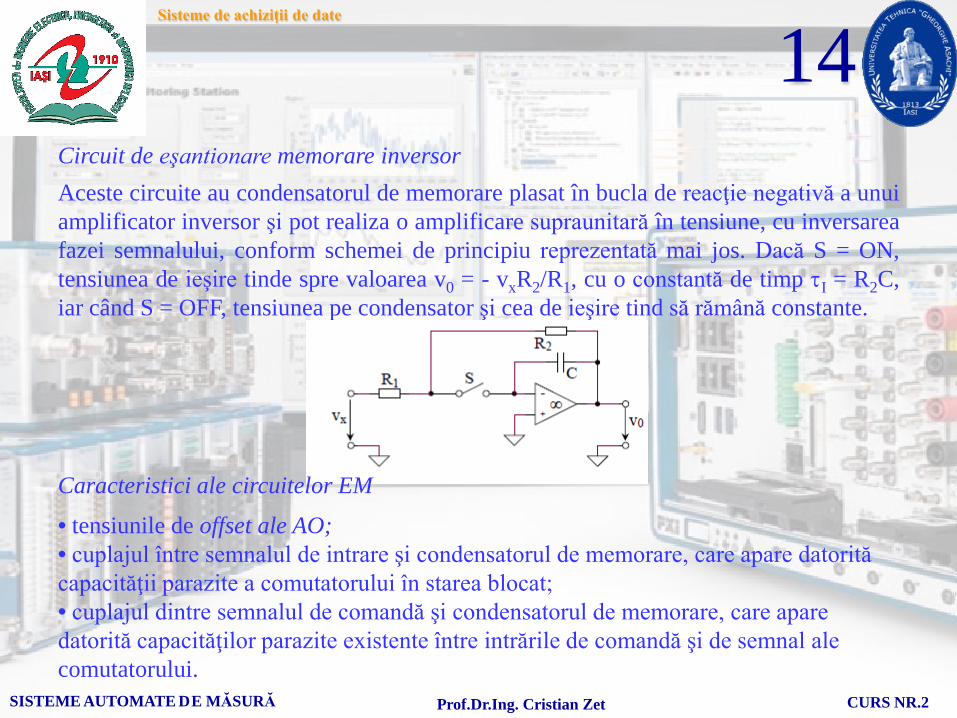
Circuit de eşantionare memorare inversorAceste circuite au condensatorul de memorare plasat în bucla de reacţie negativă a unuiamplificator inversor şi pot realiza o amplificare supraunitară în tensiune, cu inversareafazei semnalului, conform schemei de principiu reprezentată mai jos. Dacă S = ON,tensiunea de ieşire tinde spre valoarea v0 = - vxR2/R1, cu o constantă de timp τI = R2C,iar când S = OFF, tensiunea pe condensator şi cea de ieşire tind să rămână constante.
Caracteristici ale circuitelor EM
• tensiunile de offset ale AO; • cuplajul între semnalul de intrare şi condensatorul de memorare, care apare datorită capacităţii parazite a comutatorului în starea blocat; • cuplajul dintre semnalul de comandă şi condensatorul de memorare, care apare datorită capacităţilor parazite existente între intrările de comandă şi de semnal ale comutatorului.
15
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
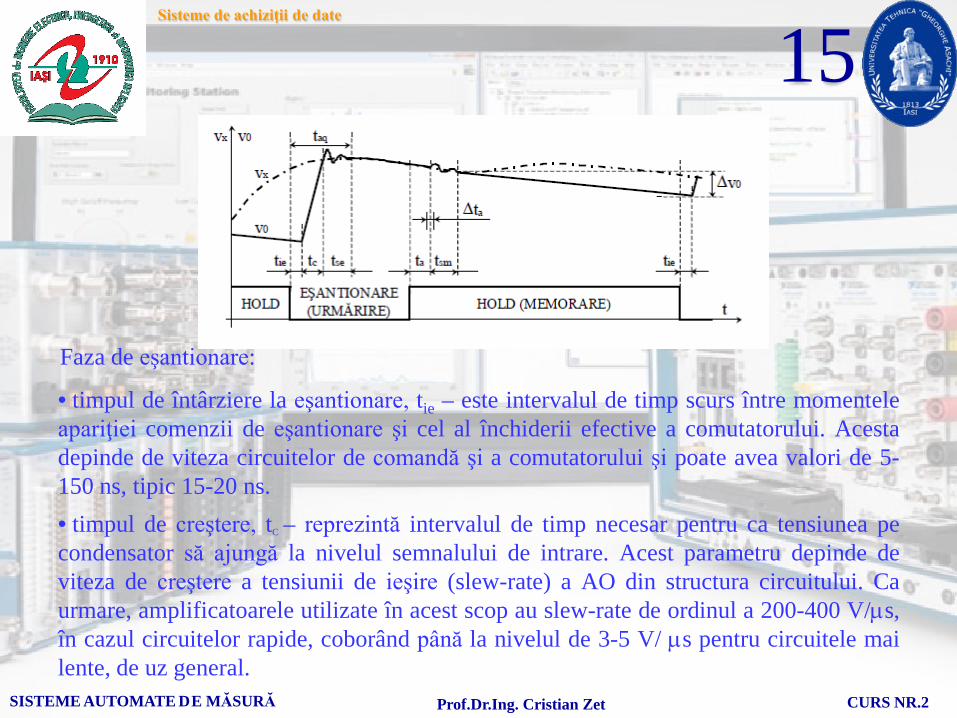
• timpul de întârziere la eşantionare, tie – este intervalul de timp scurs între momenteleapariţiei comenzii de eşantionare şi cel al închiderii efective a comutatorului. Acestadepinde de viteza circuitelor de comandă şi a comutatorului şi poate avea valori de 5-150 ns, tipic 15-20 ns.• timpul de creştere, tC – reprezintă intervalul de timp necesar pentru ca tensiunea pecondensator să ajungă la nivelul semnalului de intrare. Acest parametru depinde deviteza de creştere a tensiunii de ieşire (slew-rate) a AO din structura circuitului. Caurmare, amplificatoarele utilizate în acest scop au slew-rate de ordinul a 200-400 V/µs,în cazul circuitelor rapide, coborând până la nivelul de 3-5 V/ µs pentru circuitele mailente, de uz general.
Faza de eşantionare:
16
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
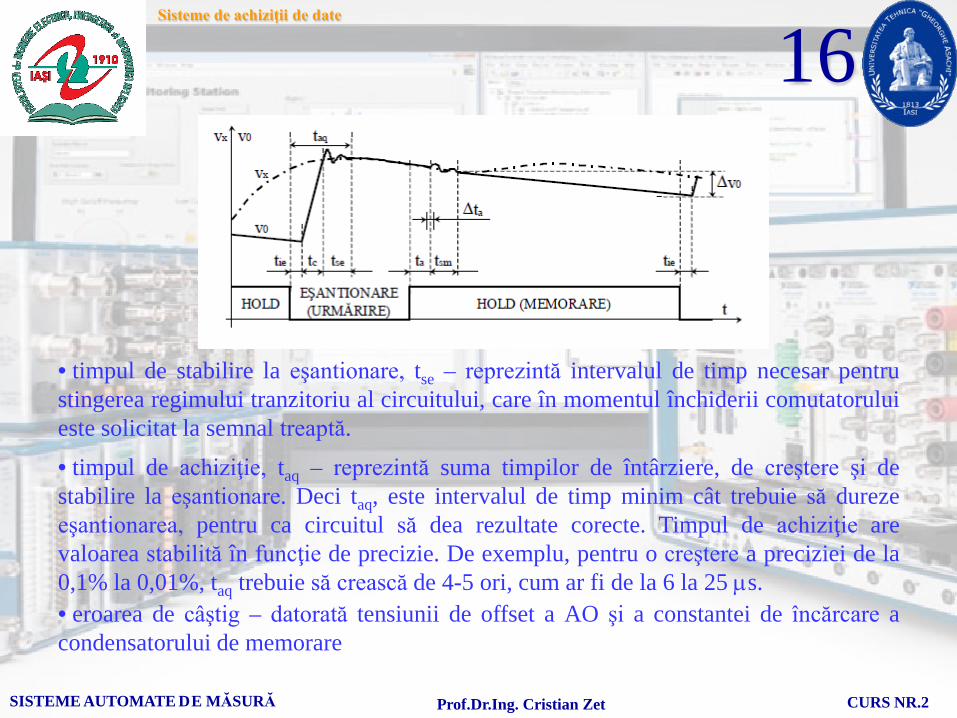
• timpul de stabilire la eşantionare, tse – reprezintă intervalul de timp necesar pentrustingerea regimului tranzitoriu al circuitului, care în momentul închiderii comutatoruluieste solicitat la semnal treaptă.• timpul de achiziţie, taq – reprezintă suma timpilor de întârziere, de creştere şi destabilire la eşantionare. Deci taq, este intervalul de timp minim cât trebuie să durezeeşantionarea, pentru ca circuitul să dea rezultate corecte. Timpul de achiziţie arevaloarea stabilită în funcţie de precizie. De exemplu, pentru o creştere a preciziei de la0,1% la 0,01%, taq trebuie să crească de 4-5 ori, cum ar fi de la 6 la 25 µs.• eroarea de câştig – datorată tensiunii de offset a AO şi a constantei de încărcare acondensatorului de memorare
17
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
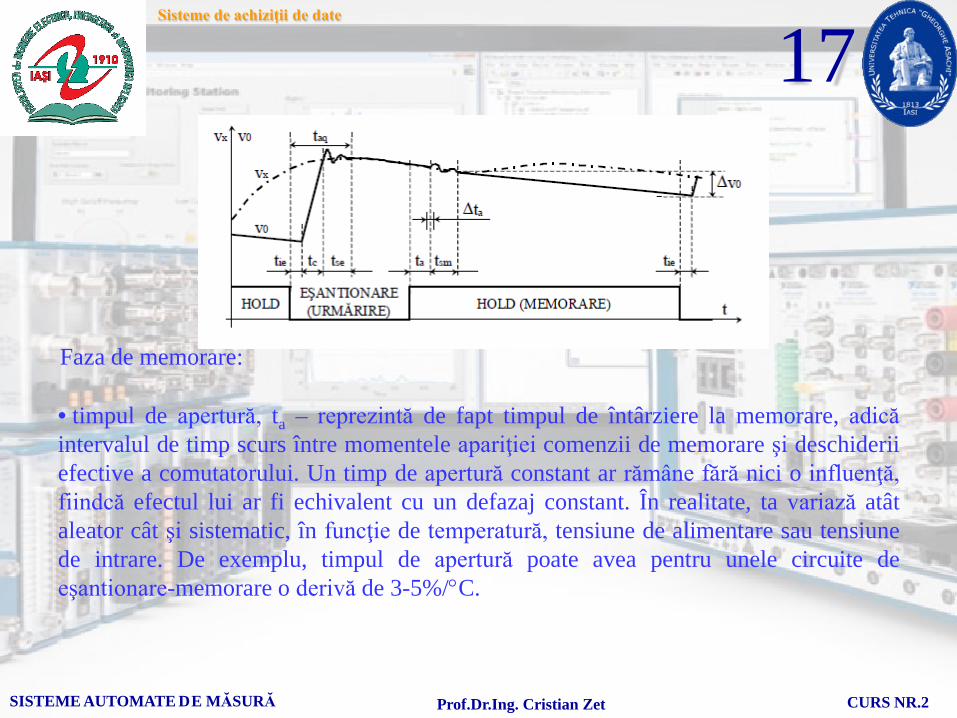
• timpul de apertură, ta – reprezintă de fapt timpul de întârziere la memorare, adicăintervalul de timp scurs între momentele apariţiei comenzii de memorare şi deschideriiefective a comutatorului. Un timp de apertură constant ar rămâne fără nici o influenţă,fiindcă efectul lui ar fi echivalent cu un defazaj constant. În realitate, ta variază atâtaleator cât şi sistematic, în funcţie de temperatură, tensiune de alimentare sau tensiunede intrare. De exemplu, timpul de apertură poate avea pentru unele circuite deeşantionare-memorare o derivă de 3-5%/°C.
Faza de memorare:
18
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
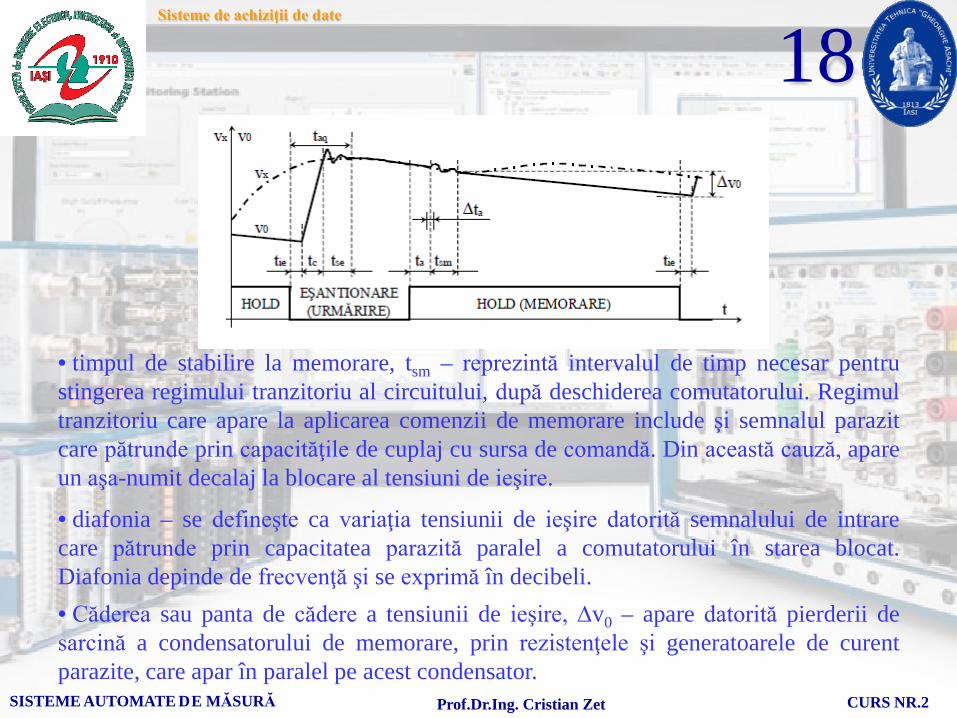
• timpul de stabilire la memorare, tsm – reprezintă intervalul de timp necesar pentrustingerea regimului tranzitoriu al circuitului, după deschiderea comutatorului. Regimultranzitoriu care apare la aplicarea comenzii de memorare include şi semnalul parazitcare pătrunde prin capacităţile de cuplaj cu sursa de comandă. Din această cauză, apareun aşa-numit decalaj la blocare al tensiuni de ieşire.
• diafonia – se defineşte ca variaţia tensiunii de ieşire datorită semnalului de intrarecare pătrunde prin capacitatea parazită paralel a comutatorului în starea blocat.Diafonia depinde de frecvenţă şi se exprimă în decibeli.• Căderea sau panta de cădere a tensiunii de ieşire, ∆v0 – apare datorită pierderii desarcină a condensatorului de memorare, prin rezistenţele şi generatoarele de curentparazite, care apar în paralel pe acest condensator.
19
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
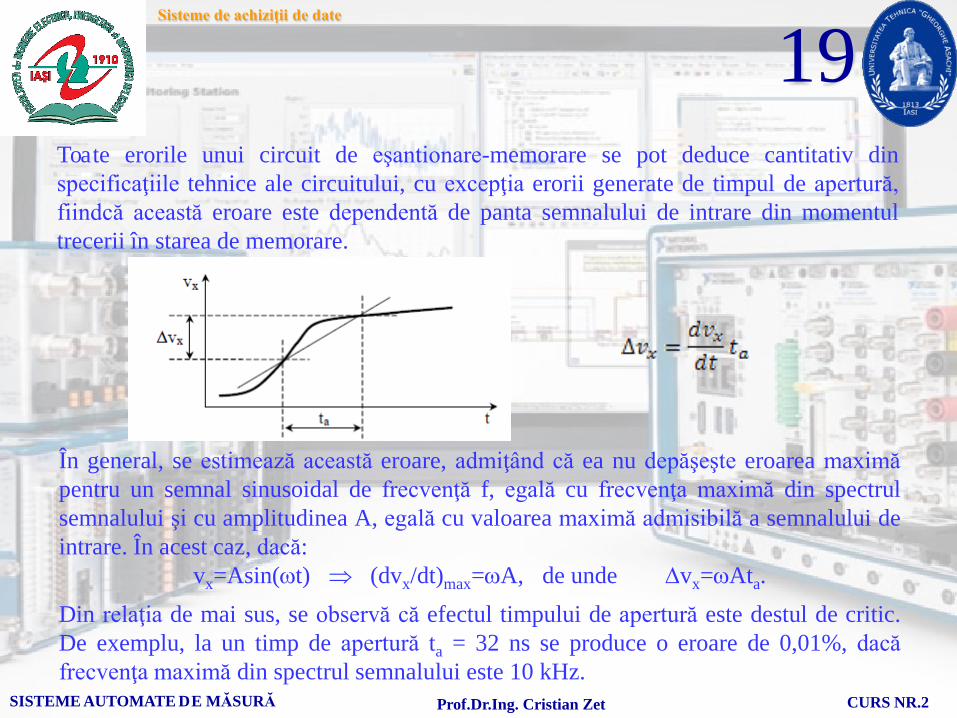
Toate erorile unui circuit de eşantionare-memorare se pot deduce cantitativ dinspecificaţiile tehnice ale circuitului, cu excepţia erorii generate de timpul de apertură,fiindcă această eroare este dependentă de panta semnalului de intrare din momentultrecerii în starea de memorare.
În general, se estimează această eroare, admiţând că ea nu depăşeşte eroarea maximăpentru un semnal sinusoidal de frecvenţă f, egală cu frecvenţa maximă din spectrulsemnalului şi cu amplitudinea A, egală cu valoarea maximă admisibilă a semnalului deintrare. În acest caz, dacă:
vx=Asin(ωt) ⇒ (dvx/dt)max=ωA, de unde ∆vx=ωAta.Din relaţia de mai sus, se observă că efectul timpului de apertură este destul de critic.De exemplu, la un timp de apertură ta = 32 ns se produce o eroare de 0,01%, dacăfrecvenţa maximă din spectrul semnalului este 10 kHz.
20
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
Codurile binare utilizate în conversia A/D sunt:- pentru semnale unipolare: binar natural, binar natural invers, codul BCD, codul Gray.- pentru semnale bipolare: cod binar deplasat, binar deplasat inversat, cod complementfaţă de doi, cod binar natural cu semn
Conversia ADMăsurarea numerică a unei mărimi electrice presupune conversia mărimii într-omărime digitală (numerică). Rezultatul conversiei aproximează valoarea mărimiianalogice cu o eroare mai mică decât cea mai mică treaptă de cuantizare. Conversiaconstă în compararea mărimii de intrare cu o mărime de referinţă (de aceeaşi natură),rezultatul fiind un cod numeric. Ecuaţia de funcţionare este:
1,/ <= NXXN refin
Clasificarea convertoarelor A/D:
- după metoda de conversie: convertoare A/D directe – conversia mărimii analogice serealizează direct, convertoare A/D indirecte – conversia mărimii analogice serealizează printr-o mărime intermediară (timp, frecvenţă) care este apoi convertită înmărimea numerică.
21
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
- după succesiunea etapelor de conversie: convertoare programate pentru careconversia decurge într-un timp stabilit de frecvenţa de tact şi numărul etapelor deparcurs şi convertoare neprogramate la care succesiunea etapelor este asincronă,începerea unei etape fiind determinată de terminarea precedentei, timpul de conversiedepinzând de valoarea mărimii convertite.- după reacţie: convertoare A/D fără reacţie când nu există comparaţie între mărimeaanalogică şi mărimea numerică de la ieşire şi convertoare A/D cu reacţie când celedouă mărimi analogică de la intrare şi numerică de la ieşire se compară între ele.- după tipul conversiei: convertoare A/D neintegratoare când conversia se realizeazăasupra valorii instantanee a semnalului preluată prin eşantionare-memorare şiconvertoare A/D integratoare când conversia se realizează asupra valorii medii aacestuia.
22
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
Mărimi caracteristice convertoarelor A/DConvertorul A/D este un circuit care transformă o mărime de intrare analogică (deregulă tensiune, dar poate fi şi curent) într-o mărime de ieşire numerică. Conversiapoate fi privit ca o clasificare a mărimii de intrare analogică într-un număr de clasedistincte, iar rezultatul este numărul clasei în care a fost încadrat semnalul. Astfel,domeniul maxim în care poate varia mărimea de intrare se împarte într-un număr deintervale (funcţie de n numărul de biţi sunt 2n intervale) cu limitele (Lk, Lk+1). Mărimiide intrare i se atribuite valoarea k dacă:
1+≤≤ kik LxL
xLL kk ∆=−+1
constituie lăţimea clasei. Toate valorile mărimii de intrare ce îndeplinesc relaţia de maisus, vor fi încadrate în aceeaşi clasă (vor avea aceeaşi valoare).
Rezoluţia unui convertor A/D se defineşte ca fiind egală cu variaţia semnalului deintrare necesară pentru a schimba două coduri numerice consecutive la ieşire. Seobservă apariţia unei erori principiale de conversie, eroare care se numeşte eroare decuantizare.
23
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
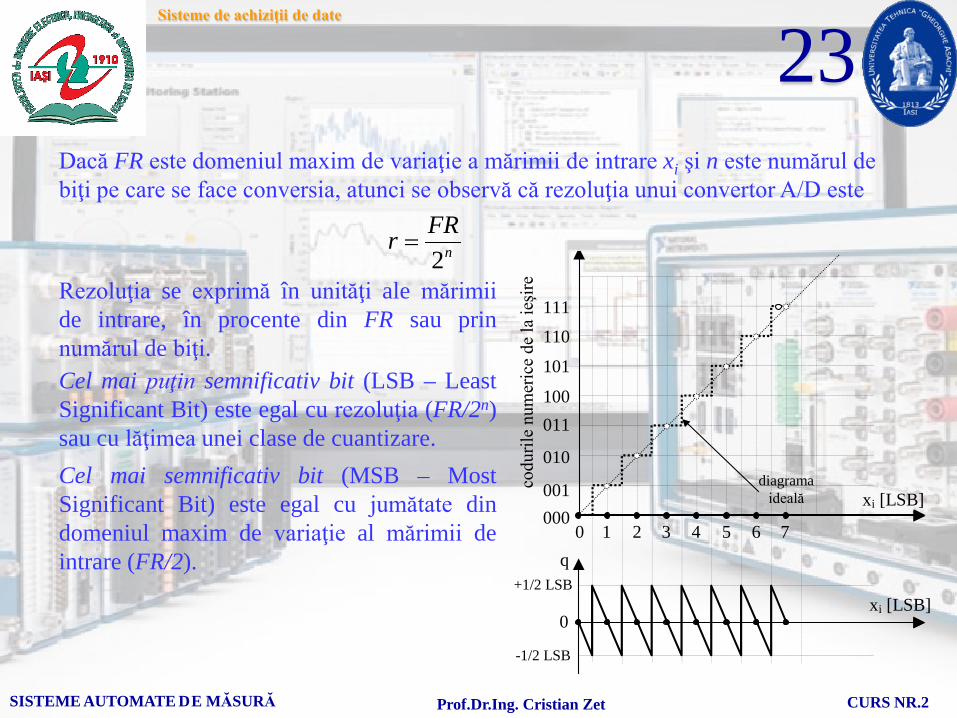
Dacă FR este domeniul maxim de variaţie a mărimii de intrare xi şi n este numărul de biţi pe care se face conversia, atunci se observă că rezoluţia unui convertor A/D este
nFRr2
=
Rezoluţia se exprimă în unităţi ale mărimiide intrare, în procente din FR sau prinnumărul de biţi.
xi [LSB]
1 2 3 4 5 6 7 000 001
010
011 100
101
110 111
diagrama ideală
codu
rile
num
eric
e de
la ie
şire
0
+1/2 LSB
-1/2 LSB
0 xi [LSB]
q
Cel mai puţin semnificativ bit (LSB – LeastSignificant Bit) este egal cu rezoluţia (FR/2n)sau cu lăţimea unei clase de cuantizare.Cel mai semnificativ bit (MSB – MostSignificant Bit) este egal cu jumătate dindomeniul maxim de variaţie al mărimii deintrare (FR/2).
24
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
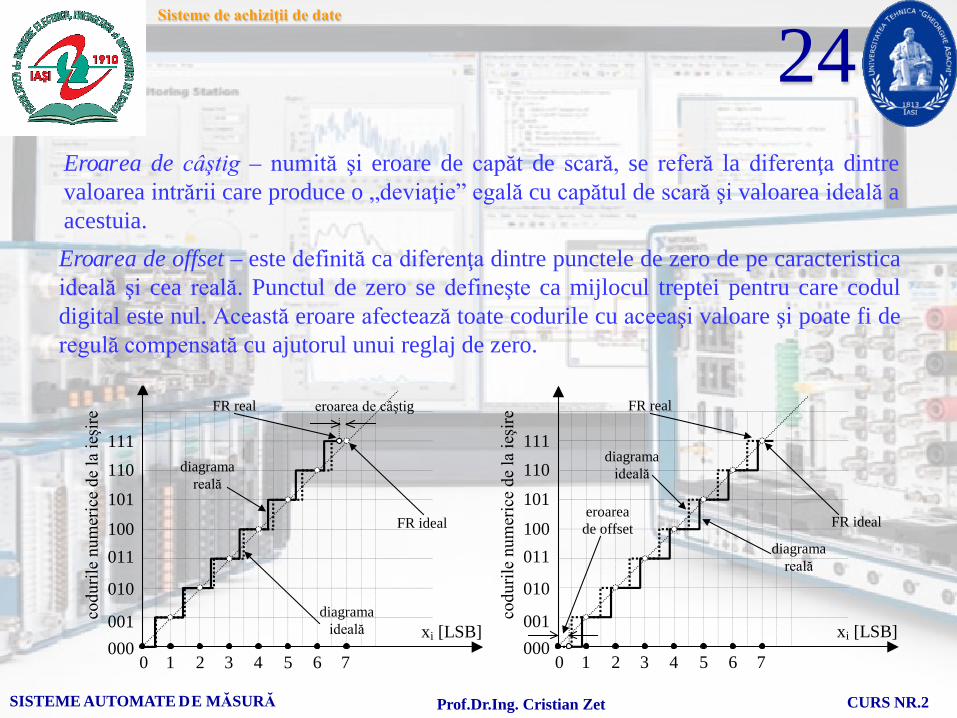
Eroarea de offset – este definită ca diferenţa dintre punctele de zero de pe caracteristicaideală şi cea reală. Punctul de zero se defineşte ca mijlocul treptei pentru care coduldigital este nul. Această eroare afectează toate codurile cu aceeaşi valoare şi poate fi deregulă compensată cu ajutorul unui reglaj de zero.
xi [LSB]
1 2 3 4 5 6 7 000 001
010
011 100
101
110 111
eroarea de câştig
diagrama ideală
FR real
codu
rile
num
eric
e de
la ie
şire
0
FR ideal
diagrama reală
xi [LSB]
1 2 3 4 5 6 7 000 001
010
011 100
101
110 111
eroarea de offset
diagrama ideală
FR real
codu
rile
num
eric
e de
la ie
şire
0
FR ideal
diagrama reală
Eroarea de câştig – numită şi eroare de capăt de scară, se referă la diferenţa dintrevaloarea intrării care produce o „deviaţie” egală cu capătul de scară şi valoarea ideală aacestuia.
25
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
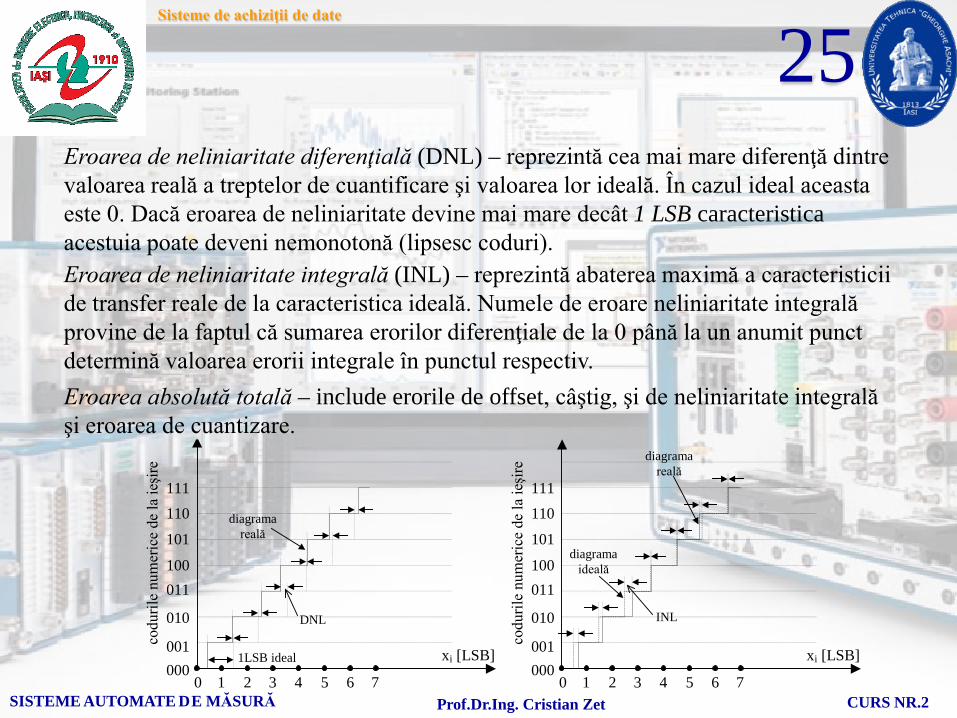
Eroarea de neliniaritate diferenţială (DNL) – reprezintă cea mai mare diferenţă dintre valoarea reală a treptelor de cuantificare şi valoarea lor ideală. În cazul ideal aceasta este 0. Dacă eroarea de neliniaritate devine mai mare decât 1 LSB caracteristica acestuia poate deveni nemonotonă (lipsesc coduri).
xi [LSB]
1 2 3 4 5 6 7 000 001
010
011 100
101
110 111
codu
rile
num
eric
e de
la ie
şire
0
diagrama reală
xi [LSB]
1 2 3 4 5 6 7 000 001
010
011 100
101
110 111
diagrama ideală
codu
rile
num
eric
e de
la ie
şire
0
diagrama reală
1LSB ideal
DNL INL
Eroarea de neliniaritate integrală (INL) – reprezintă abaterea maximă a caracteristicii de transfer reale de la caracteristica ideală. Numele de eroare neliniaritate integrală provine de la faptul că sumarea erorilor diferenţiale de la 0 până la un anumit punct determină valoarea erorii integrale în punctul respectiv.Eroarea absolută totală – include erorile de offset, câştig, şi de neliniaritate integrală şi eroarea de cuantizare.
26
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
Convertoare AD integratoare
Sunt în principiu convertoare indirecte deoarece comparaţia dintre mărimea de măsuratşi cea de referinţă se face printr-o mărime intermediară, de regulă timpul sau frecvenţa.Avantajul acestor convertoare îl reprezintă rejecţia care o realizează asupra semnalelorperturbatoare suprapuse peste semnalul util. Dintre această familie fac parteconvertoarele cu integrare simplă pantă (sau simplă integrare), convertoarele cuintegrare dublă pantă (sau cu dublă integrare), convertoarele cu integrare cu pantămultiplă şi convertoarele tensiune – frecvenţă. Cele mai răspândite sunt cel cu dublăpantă datorită raportului performanţe / complexitate şi cel cu pantă multiplă datorităpreciziei ridicate.
27
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
Convertoare AD integratoare
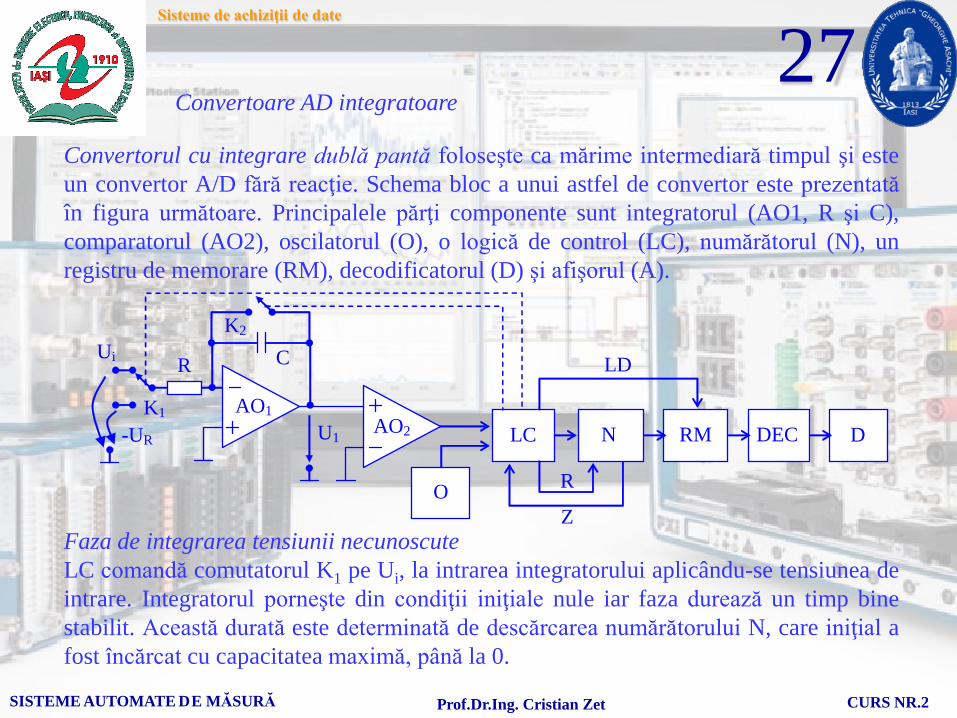
Convertorul cu integrare dublă pantă foloseşte ca mărime intermediară timpul şi esteun convertor A/D fără reacţie. Schema bloc a unui astfel de convertor este prezentatăîn figura următoare. Principalele părţi componente sunt integratorul (AO1, R şi C),comparatorul (AO2), oscilatorul (O), o logică de control (LC), numărătorul (N), unregistru de memorare (RM), decodificatorul (D) şi afişorul (A).
AO1 AO2 LC N RM DEC D
K1
K2 C R
Ui
-UR U1
O
LD
R
Z Faza de integrarea tensiunii necunoscuteLC comandă comutatorul K1 pe Ui, la intrarea integratorului aplicându-se tensiunea deintrare. Integratorul porneşte din condiţii iniţiale nule iar faza durează un timp binestabilit. Această durată este determinată de descărcarea numărătorului N, care iniţial afost încărcat cu capacitatea maximă, până la 0.
28
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
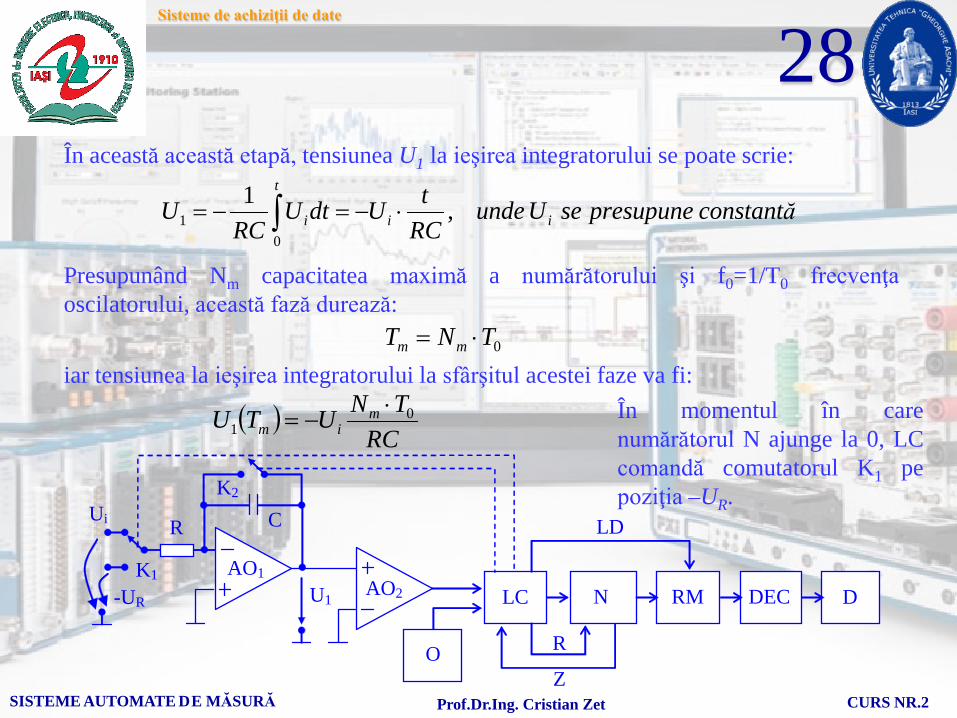
În această această etapă, tensiunea U1 la ieşirea integratorului se poate scrie:
AO1 AO2 LC N RM DEC D
K1
K2 C R
Ui
-UR U1
O
LD
R
Z
constantăpresupune seUundeRCtUdtU
RCU ii
t
i ,1
01 ⋅−=−= ∫
Presupunând Nm capacitatea maximă a numărătorului şi f0=1/T0 frecvenţaoscilatorului, această fază durează:
0TNT mm ⋅=iar tensiunea la ieşirea integratorului la sfârşitul acestei faze va fi:
( )RC
TNUTU mim
01
⋅−= În momentul în care
numărătorul N ajunge la 0, LCcomandă comutatorul K1 pepoziţia –UR.
29
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
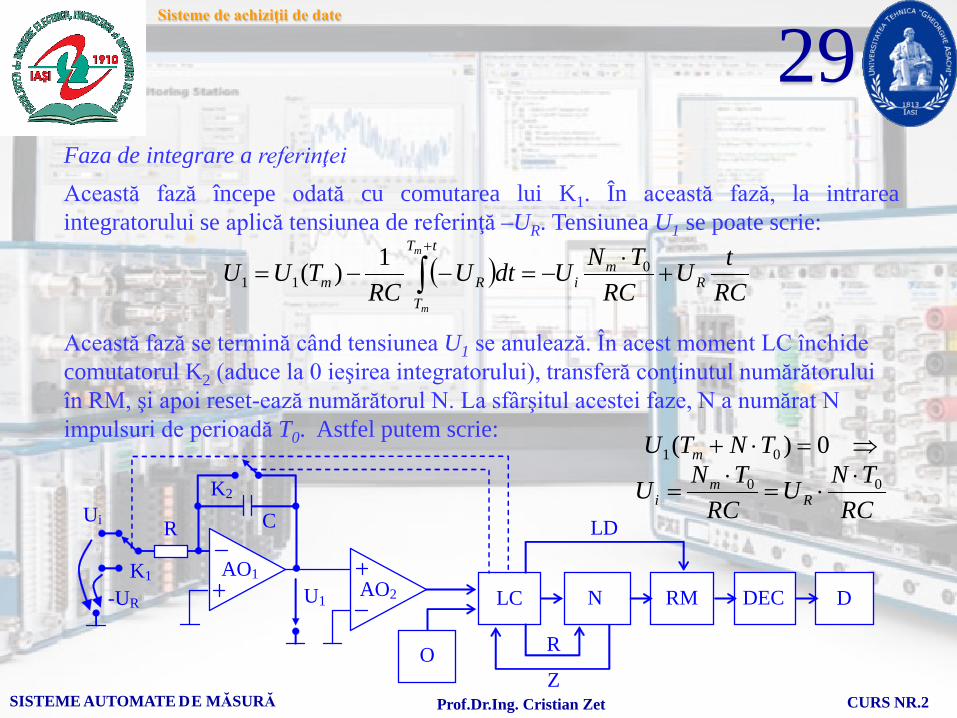
Faza de integrare a referinţei
AO1 AO2 LC N RM DEC D
K1
K2 C R
Ui
-UR U1
O
LD
R
Z
Această fază începe odată cu comutarea lui K1. În această fază, la intrareaintegratorului se aplică tensiunea de referinţă –UR. Tensiunea U1 se poate scrie:
( )RCtU
RCTNUdtU
RCTUU R
mi
tT
TRm
m
m
+⋅
−=−−= ∫+
011
1)(
Această fază se termină când tensiunea U1 se anulează. În acest moment LC închide comutatorul K2 (aduce la 0 ieşirea integratorului), transferă conţinutul numărătorului în RM, şi apoi reset-ează numărătorul N. La sfârşitul acestei faze, N a numărat N impulsuri de perioadă T0. Astfel putem scrie:
RCTNU
RCTNU
TNTU
Rm
i
m
00
01 0)(⋅
⋅=⋅
=
⇒=⋅+
30
SISTEME AUTOMATE DE MĂSURĂ CURS NR.2Prof.Dr.Ing. Cristian Zet
Sisteme de achiziţii de date
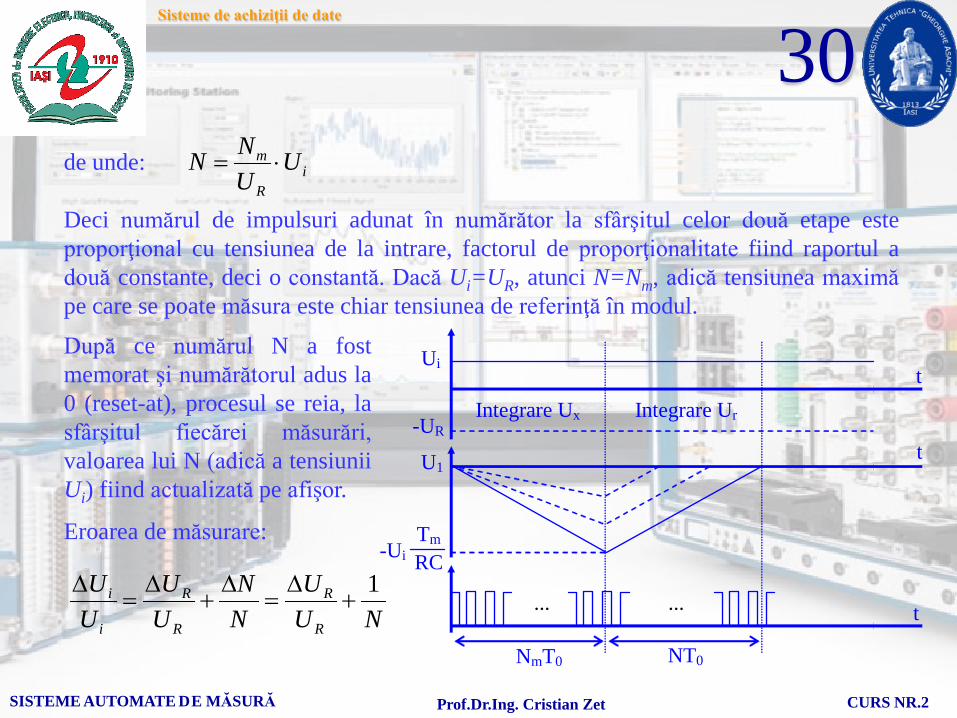
de unde: iR
m UUNN ⋅=
Deci numărul de impulsuri adunat în numărător la sfârşitul celor două etape esteproporţional cu tensiunea de la intrare, factorul de proporţionalitate fiind raportul adouă constante, deci o constantă. Dacă Ui=UR, atunci N=Nm, adică tensiunea maximăpe care se poate măsura este chiar tensiunea de referinţă în modul.
După ce numărul N a fostmemorat şi numărătorul adus la0 (reset-at), procesul se reia, lasfârşitul fiecărei măsurări,valoarea lui N (adică a tensiuniiUi) fiind actualizată pe afişor.
... ...
NmT0
U1
Ui
-UR
t
t
t
NT0
-Ui Tm
RC
Integrare Ux Integrare Ur
NUU
NN
UU
UU
R
R
R
R
i
i 1+
∆=
∆+
∆=
∆
Eroarea de măsurare: