Iar TCN coaie
33
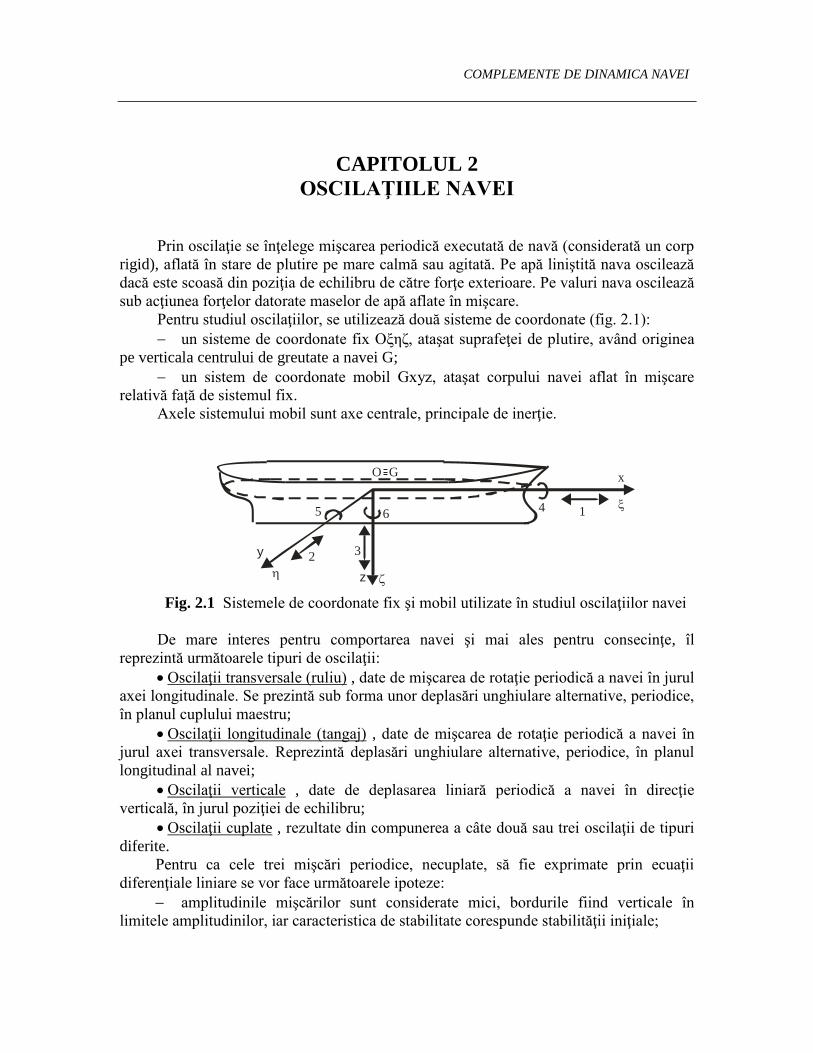
COMPLEMENTE DE DINAMICA NAVEI CAPITOLUL 2 OSCILAŢIILE NAVEI Prin oscilaţie se înţelege mişcarea periodică executată de navă (considerată un corp rigid), aflată în stare de plutire pe mare calmă sau agitată. Pe apă liniştită nava oscilează dacă este scoasă din poziţia de echilibru de către forţe exterioare. Pe valuri nava oscilează sub acţiunea forţelor datorate maselor de apă aflate în mişcare. Pentru studiul oscilaţiilor, se utilizează două sisteme de coordonate (fig. 2.1): un sisteme de coordonate fix Oξηζ, ataşat suprafeţei de plutire, având originea pe verticala centrului de greutate a navei G; un sistem de coordonate mobil Gxyz, ataşat corpului navei aflat în mişcare relativă faţă de sistemul fix. Axele sistemului mobil sunt axe centrale, principale de inerţie. O G x y z 1 2 5 6 4 3 Fig. 2.1 Sistemele de coordonate fix şi mobil utilizate în studiul oscilaţiilor navei De mare interes pentru comportarea navei şi mai ales pentru consecinţe, îl reprezintă următoarele tipuri de oscilaţii: Oscilaţii transversale (ruliu) , date de mişcarea de rotaţie periodică a navei în jurul axei longitudinale. Se prezintă sub forma unor deplasări unghiulare alternative, periodice, în planul cuplului maestru; Oscilaţii longitudinale (tangaj) , date de mişcarea de rotaţie periodică a navei în jurul axei transversale. Reprezintă deplasări unghiulare alternative, periodice, în planul longitudinal al navei; Oscilaţii verticale , date de deplasarea liniară periodică a navei în direcţie verticală, în jurul poziţiei de echilibru; Oscilaţii cuplate , rezultate din compunerea a câte două sau trei oscilaţii de tipuri diferite. Pentru ca cele trei mişcări periodice, necuplate, să fie exprimate prin ecuaţii diferenţiale liniare se vor face următoarele ipoteze: amplitudinile mişcărilor sunt considerate mici, bordurile fiind verticale în limitele amplitudinilor, iar caracteristica de stabilitate corespunde stabilităţii iniţiale;
description
Mortii ma-tii de TCN
Transcript of Iar TCN coaie
COMPLEMENTE DE DINAMICA NAVEI
CAPITOLUL 2
OSCILAŢIILE NAVEI
Prin oscilaţie se înţelege mişcarea periodică executată de navă (considerată un corp
rigid), aflată în stare de plutire pe mare calmă sau agitată. Pe apă liniştită nava oscilează
dacă este scoasă din poziţia de echilibru de către forţe exterioare. Pe valuri nava oscilează
sub acţiunea forţelor datorate maselor de apă aflate în mişcare.
Pentru studiul oscilaţiilor, se utilizează două sisteme de coordonate (fig. 2.1):
un sisteme de coordonate fix Oξηζ, ataşat suprafeţei de plutire, având originea
pe verticala centrului de greutate a navei G;
un sistem de coordonate mobil Gxyz, ataşat corpului navei aflat în mişcare
relativă faţă de sistemul fix.
Axele sistemului mobil sunt axe centrale, principale de inerţie.
O G x
y
z
1
2
5 64
3
Fig. 2.1 Sistemele de coordonate fix şi mobil utilizate în studiul oscilaţiilor navei
De mare interes pentru comportarea navei şi mai ales pentru consecinţe, îl
reprezintă următoarele tipuri de oscilaţii:
Oscilaţii transversale (ruliu) , date de mişcarea de rotaţie periodică a navei în jurul
axei longitudinale. Se prezintă sub forma unor deplasări unghiulare alternative, periodice,
în planul cuplului maestru;
Oscilaţii longitudinale (tangaj) , date de mişcarea de rotaţie periodică a navei în
jurul axei transversale. Reprezintă deplasări unghiulare alternative, periodice, în planul
longitudinal al navei;
Oscilaţii verticale , date de deplasarea liniară periodică a navei în direcţie
verticală, în jurul poziţiei de echilibru;
Oscilaţii cuplate , rezultate din compunerea a câte două sau trei oscilaţii de tipuri
diferite.
Pentru ca cele trei mişcări periodice, necuplate, să fie exprimate prin ecuaţii
diferenţiale liniare se vor face următoarele ipoteze:
amplitudinile mişcărilor sunt considerate mici, bordurile fiind verticale în
limitele amplitudinilor, iar caracteristica de stabilitate corespunde stabilităţii iniţiale;

Capitolul II. – Oscilaţiile navei 57
suprafaţa valului se consideră plană, efectuând mişcări periodice de translaţie şi
de rotaţie;
se neglijează efectul variaţiei presiunii în val, în limita pescajului, datorită
modificării caracteristicilor valului cu adâncimea.
1. OSCILAŢIILE TRANSVERSALE (RULIU)
Ruliul reprezintă mişcarea de rotaţie transversală a navei care are loc în jurul axului
longitudinal care trece prin centrul de greutate. Este o oscilaţie forţată produsă de forţele
periodice exercitate de valuri şi căreia i se opun forţele de rezistenţă ale mediului, de
inerţie şi de redresare.
W V
L VW
L
-
y
z
iVMRVM
PVM
O G
iaM
RMsMiNM
Fig. 2.2 Momentele care acţionează asupra navei aflată în mişcare de ruliu
În cazul general, asupra navei vor acţiona momentele (fig. 2.2):
iNM momentul forţelor de inerţie al navei:
xxiN IM ; (2.1)
sM momentul de stabilitate statică:
Ts GMgM ; (2.2)
RM momentul forţelor de rezistenţă ale apei antrenată în mişcare:
NM R 2 ; (2.3)
iaM momentul forţelor de inerţie ale apei antrenată în mişcare:
xxia IM ; (2.4)
PVM momentul perturbator dat de val:
TPV GMgM ; (2.5)
RVM momentul forţelor de rezistenţă suplimentar din val:
NMRV 2 ; (2.6)
iVM momentul forţelor de inerţie suplimentar din val:

COMPLEMENTE DE DINAMICA NAVEI
xxiV IM . (2.7)
Ecuaţia diferenţială a mişcării de ruliu a navei pe valuri este:
TxxTxxxx GMNIGMgNII 22 ,
(2.8)
unde
xxI este momentul de inerţie al masei navei faţă de axa longitudinală 2tm ;
xxI este momentul de inerţie al masei de apă antrenată în mişcare, faţă de axa
longitudinală 2tm ;
N2 este coeficient de amortizare.
Mişcarea navei se studiază atât în coordonate absolute, pentru determinarea
înclinărilor absolute, vitezelor şi acceleraţiilor faţă de suprafaţa apei calme iniţială, cât şi
în coordonate relative faţă de suprafaţa valului, necesare pentru evaluarea gradului de
inundare a punţii.
1.1 Studiul mişcării de ruliu, neamortizată pe apă liniştită
Ecuaţia de mişcare este:
0 Txxxx GMgII . (2.10)
Valoarea momentului de inerţie masic al navei, Ixx, se determină cu ajutorul unor
formule empirice: 22 38,0 BiI xxxx , (2.11)
unde:
xxi - este raza de inerţie [m];
- deplasamentul navei în [t];
g - acceleraţia gravitaţională în [m/s2];
B - lăţimea navei la cuplul maestru în [m].
Raza de inerţie a corpului navei faţă de axa Gx se calculează cu relaţia:
xxiii
xx
irmi
2
[m], (2.12)
unde:
im reprezintă masele componente de la bord;
ir este distanţa de la axa de rotaţie Gx la centrul masei componente;
xxii este momentul de inerţie al masei i în raport cu axa proprie paralelă cu Gx.
Pulsaţia oscilaţiilor transversale libere, neamortizate este:
1xx
T
I
GMgp
[s
-1] (2.13)
Soluţia sub formă armonică este
cosA p t , (2.14)

Capitolul II. – Oscilaţiile navei 59
în care s-au notat:
2
2 00A
p
, (2.15)
amplitudinea mişcării şi
0
0
arctgp
, (2.16)
faza iniţială a oscilaţiei libere neamortizată.
Perioada oscilaţiilor libere de ruliu este:
2T
p
; (2.17)
2
12
12
1
1 22
T
xx
T
xx
GMg
i
GMg
IT . (2.18)
1.2 Studiul mişcării de ruliu, cu amortizare pe apă liniştită
Amplitudinea ruliului nu este constantă, deoarece oscilaţiile se amortizează datorită
rezistenţei pe care o întâmpină corpul navei din partea apei. Această rezistenţă este
proporţională cu viteza unghiulară d
dt
de înclinare a navei şi se poate exprima printr-un
moment RM r care se opune mişcării de ruliu, dat de relaţia (2.3):
NM R 2 ,
unde 2N este coeficient de proporţionalitate (coeficient de amortizare).
Coeficientul de amortizare datorat efectului apei în timpul oscilaţiei transversale, se
calculează cu metoda fâşiilor. Astfel coeficientul de amortizare pe unitatea de lungime se
determină cu relaţia: 22 22
32
2 2
n e nn
e
B BgN d
g
, (2.19)
unde:
este densitatea apei de mare;
e pulsaţia de întâlnire dintre navă şi valuri;
nB lăţimea maximă a navei la secţiunea n;
d factor ce se determină grafic funcţie de coeficientul de fineţe al suprafeţei
transversale şi raportul n
n
d
B
2.
Pulsaţia de întâlnire dintre navă si valuri se determină cu relaţia:
cos1
c
ve , (2.20)

COMPLEMENTE DE DINAMICA NAVEI
unde
v este viteza de deplasare a navei;
c este viteza aparentă a valului;
pulsaţia absolută a valului;
unghiul de întâlnire dintre direcţia de propagare a valului şi direcţia de
deplasare a navei, măsurat de la direcţia valului în sensul acelor de ceas spre direcţia de
deplasare a navei.
Ecuaţia diferenţială a mişcării:
02 2 p , (2.21)
în care factorul de amortizare este dat de relaţia:
xx xx
N
I I
. (2.22)
Se notează:
1
2 2 2rp p , (2.23)
pulsaţia oscilaţiei transversale amortizată, liberă.
Mişcarea sub forma armonică este dată de relaţia:
rrArt
pe
cos' . (2.24)
În relaţia (2.24) s-au notat expresiile:
2
0 0' 20Ar
rp
; (2.25
0 0
0r
r
arctgp
, (2.26)
amplitudinea iniţială a mişcării şi faza iniţială a oscilaţiilor transversale amortizate pe apă
liniştită.
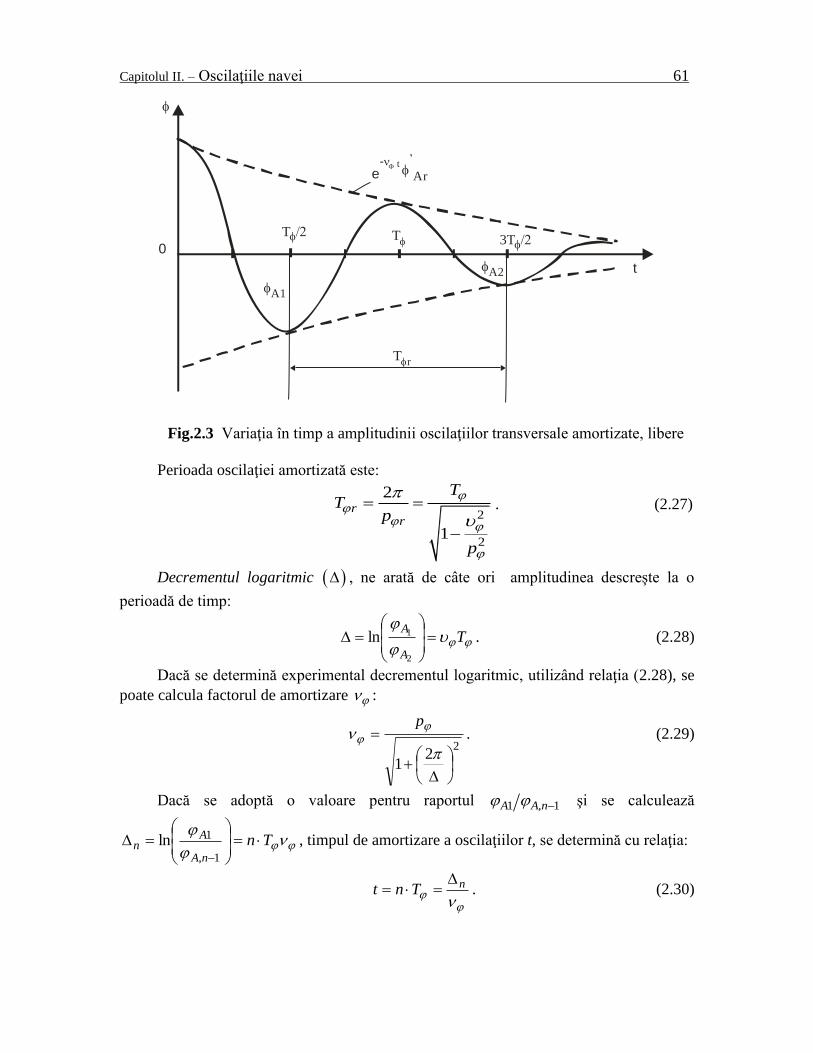
Amplitudinea oscilaţiilor transversale amortizate, libere, descreşte după o lege
exponenţială în timp (fig. 2.3).
Capitolul II. – Oscilaţiile navei 61
t
Tr
A1
A2
0
T T 3T
e-
t’
Ar
Fig.2.3 Variaţia în timp a amplitudinii oscilaţiilor transversale amortizate, libere
Perioada oscilaţiei amortizată este:
2
2
2
1
rr
TT
p
p
. (2.27)
Decrementul logaritmic , ne arată de câte ori amplitudinea descreşte la o
perioadă de timp:
T
A
A
2
1ln . (2.28)
Dacă se determină experimental decrementul logaritmic, utilizând relaţia (2.28), se
poate calcula factorul de amortizare :
22
1
p. (2.29)
Dacă se adoptă o valoare pentru raportul 1 , 1A A n şi se calculează
Tn
nA
An
1,
1ln , timpul de amortizare a oscilaţiilor t, se determină cu relaţia:
nTnt
. (2.30)

COMPLEMENTE DE DINAMICA NAVEI
1.3 Oscilaţia de ruliu pe valuri regulate în coordonate absolute
Suprafaţa liberă a valului considerată simplu armonică, raportată la sistemul fix
Oξηζ, este dată de ecuaţia:
teAVV cos . (2.31)
Panta valului se determină cu expresia:
teA sin . (2.32)
S-au făcut următoarele notaţii:
AV este amplitudinea valului regulat;
k este pulsaţia formei valului;
~
este lungimea valului.
Ecuaţia mişcării de ruliu în forma simplificată este:
2 sinT Txx xx AI I N g GM GM t , (2.33)
sau sub forma:
2 22 sinAp p t . (2.34)
Soluţia particulară 2 este de forma:
tA sin2 . (2.35)
Expresia amplitudinii mişcării:
2
2 2 21 4
AA
x x
. (2.36)
Expresia defazajului dintre mişcarea de oscilaţie şi excitaţie:
21
2
x
xtg
, (2.37)
cu notaţiile:
p - coeficient de amortizare;
px - pulsaţia relativă a valului, sau factor de acordaj.
Pentru a analiza variaţia amplitudinii oscilaţiei stabilizate funcţie de factorul de
acordaj x se introduce noţiunea de factor de amplificare , dat de relaţia:
2
2 2 2
1
1 4
A
A x x
. (2.38)
În activitatea practică, interesează în mod deosebit amplitudinea şi defazajul
mişcării oscilatorii. În acest sens se vor reprezenta graficele de variaţie ale mărimilor
x (fig. 2.4) şi x (fig. 2.5).

Capitolul II. – Oscilaţiile navei 63
a) Pentru 0x rezultă 1 . Nava oscilează pe un val cu lungime foarte
mare, sau are un moment de inerţie foarte mic. În acest caz nava urmăreşte în
permanenţă suprafaţa valului, având înclinarea maximă egală cu amplitudinea
unghiului de pantă al valului.
b) Pentru x rezultă 0 . Este cazul real de exploatare pe valuri cu
perioade mici, sau nava are o stabilitate foarte mică sau o inerţie foarte mare.
c) Pentru 1x , cazul de rezonanţă,
2
1 . Factorul de amplificare depinde
de coeficientul de amortizare al navei. Amplitudinea oscilaţiei este cu atât mai
mare cu cât coeficientul de amortizare este mai mic
X
1
1
< < <
X
< <
Fig. 2.4 Dependenţa factorului de amplificare de pulsaţia relativă a valului
Factorul de amplificare este maxim la valori mai mici decât 1, valoare ce
corespunde rezonanţei fără amortizare.
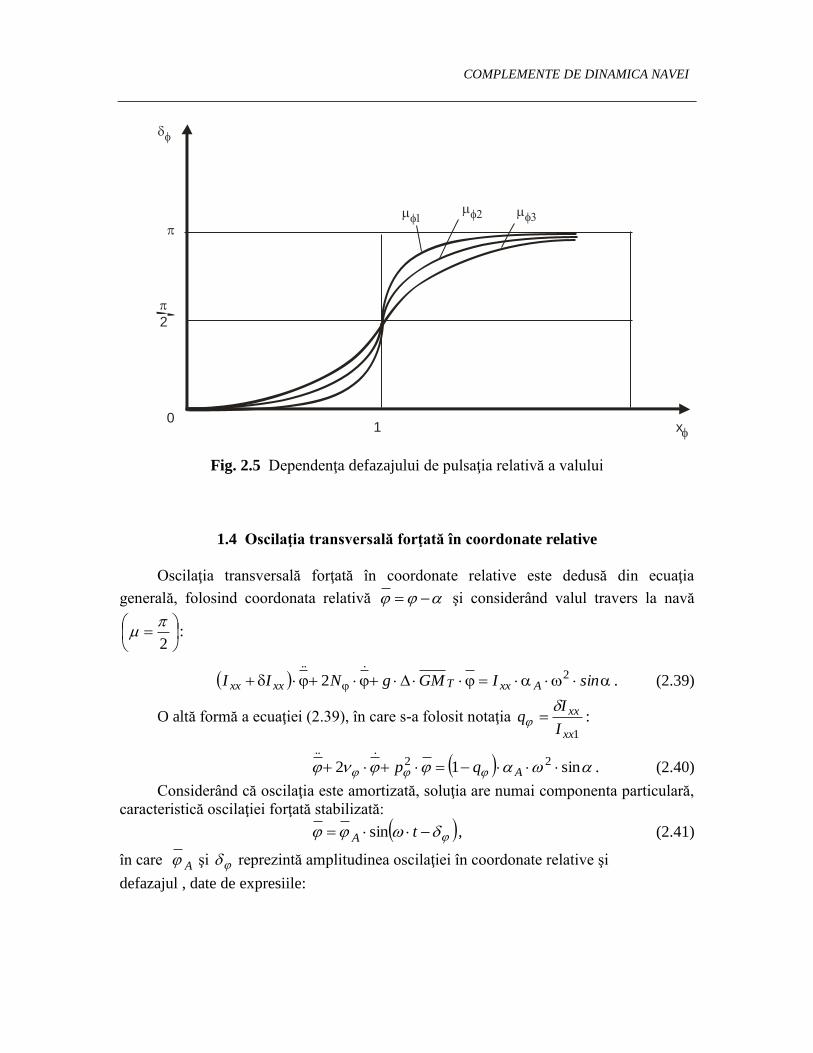
Din reprezentarea grafică a defazajului (fig. 2.5) se pot observa următoarele cazuri:
a) Pentru 0x , 0tg şi 0 ; momentul perturbator este în fază cu
unghiul de pantă al valului;
b) Pentru 1x tg şi 2
;
c) Pentru 10 x tg0 şi 2
0
;
d) Pentru x1 0 tg şi
2
.
COMPLEMENTE DE DINAMICA NAVEI
2
0x1
Fig. 2.5 Dependenţa defazajului de pulsaţia relativă a valului
1.4 Oscilaţia transversală forţată în coordonate relative
Oscilaţia transversală forţată în coordonate relative este dedusă din ecuaţia
generală, folosind coordonata relativă şi considerând valul travers la navă
2
:
sinIGMgNII AxxT
...
xxxx22 . (2.39)
O altă formă a ecuaţiei (2.39), în care s-a folosit notaţia 1xx
xx
I
Iq
:
sin12 22...
Aqp . (2.40)
Considerând că oscilaţia este amortizată, soluţia are numai componenta particulară,
caracteristică oscilaţiei forţată stabilizată:
tA sin , (2.41)
în care A şi reprezintă amplitudinea oscilaţiei în coordonate relative şi
defazajul , date de expresiile:
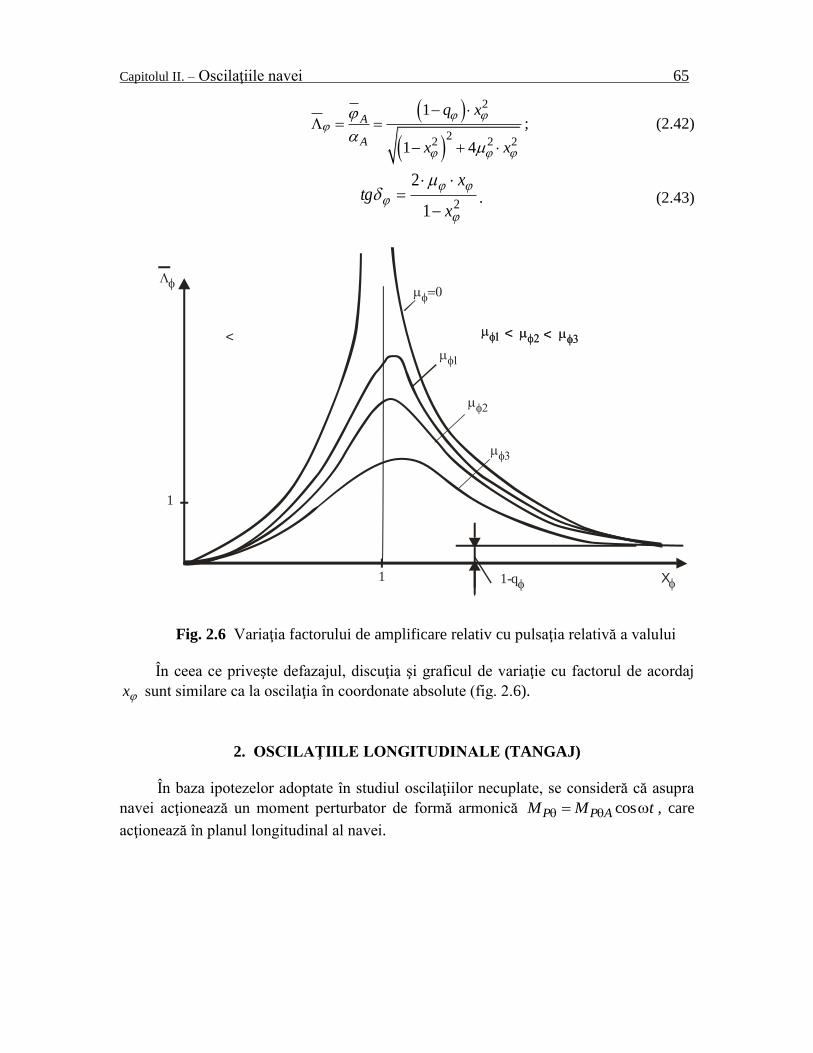
Capitolul II. – Oscilaţiile navei 65
2
22 2 2
1
1 4
A
A
q x
x x
; (2.42)
21
2
x
xtg
. (2.43)
1
1
< < <
X
< <
1-q
Fig. 2.6 Variaţia factorului de amplificare relativ cu pulsaţia relativă a valului
În ceea ce priveşte defazajul, discuţia şi graficul de variaţie cu factorul de acordaj
x sunt similare ca la oscilaţia în coordonate absolute (fig. 2.6).
2. OSCILAŢIILE LONGITUDINALE (TANGAJ)
În baza ipotezelor adoptate în studiul oscilaţiilor necuplate, se consideră că asupra
navei acţionează un moment perturbator de formă armonică cosP P AM M t , care
acţionează în planul longitudinal al navei.

COMPLEMENTE DE DINAMICA NAVEI
WV
LVW
L
-
x
z
PM
O G
iaM
RMsMiNM
Fig. 2.7 Momentele care acţionează asupra navei aflată în mişcare de tangaj
Nava oscilează sub acţiunea următoarelor momente(fig. 2.7):
iNM momentul forţelor de inerţie al navei:
yyiN IM ; (2.44)
sM momentul de stabilitate statică:
Ls GMgM ; (2.45)
RM momentul forţelor de rezistenţă ale apei antrenată în mişcare:
NM R 2 ; (2.46)
iaM momentul forţelor de inerţie ale apei antrenată în mişcare:
yyia IM ; (2.47)
PM momentul perturbator dat de val:
cosP P AM M t ; (2.48)
Ecuaţia diferenţială a mişcării de tangaj a navei pe valuri:
2 cosLyy yy P AI I N g GM M t , (2.49)
unde
yyI este momentul de inerţie al masei navei faţă de axa transversală 2tm ;
yyI este momentul de inerţie al masei de apă antrenată în mişcare faţă de axa
transversală 2tm ;
N2 este coeficient de amortizare [tm2/s].
Mişcarea navei se studiază în coordonate absolute şi se determină înclinările
absolute, vitezele şi acceleraţiile faţă de suprafaţa apei calme iniţială.

Capitolul II. – Oscilaţiile navei 67
2.1 Studiul mişcărilor de tangaj, neamortizate, pe apă liniştită
Ecuaţia diferenţială a mişcării este
0 Lyyyy GMg)II( . (2.50)
Momentul de inerţie masic 1yyI se determină cu ajutorul unor formule empirice,
dintre care se foloseşte în mod curent formula:
yyyyyyyyyy IiIII 21 , (2.51)
unde:
yyi - este raza de inerţie [m] ( pentru nave cu forme normale
0,24 0,26yyi L L );
- deplasamentul navei în [t];
Raza de inerţie a corpului navei faţă de axa Gy se calculează cu relaţia:
yyiiiyy
irmi
2
, (2.52)
unde:
im reprezintă masele componente de la bord;
ir este distanţa de la axa de rotaţie Gy lai centrul masei componente;
yyii este momentul de inerţie al masei i în raport cu axa proprie paralelă cu Gy.
Momentul de inerţie a masei de apă antrenată în mişcare se calculează cu relaţia:
2
2
2
L
L
ayy dxxmI , (2.53)
unde am este masa de apă specifică antrenată de navă, care se calculează cu relaţia:
2
2yCma
[t/m], (2.54)
în care este densitatea apei, y semilăţimea navei la linia de plutire în dreptul abscisei x
şi C coeficient, ce depinde de raportul d
y2 şi coeficientul de fineţe al secţiunii
transversale imerse.
Momentul de inerţie al masei navei mai poate fi estimat cu relaţia:
dxxAI
L
L
xyy2
2
2
, (2.55)
unde xA este aria secţiunii transversale imerse.
Pulsaţia oscilaţiilor longitudinale libere, neamortizate:
2
1p
I
GMg
yy
L
. (2.56)
Soluţia sub formă armonică:
tpA cos , (2.57)

COMPLEMENTE DE DINAMICA NAVEI
în care s-au notat:
2
020
pA
, amplitudinea mişcării, şi (2.58)
parctg
0
0
, (2.59)
faza iniţială a oscilaţiei libere neamortizată.
Perioada oscilaţiilor libere de tangaj se calculează cu relaţia:
21
12
1
1 2
22
L
yy
L
yy
GMg
i
GMg
IT . (2.60)
2.2 Studiul mişcării de tangaj, amortizată pe apă liniştită
Oscilaţiile se amortizează datorită rezistenţei pe care o întâmpină corpul navei din
partea apei. Această rezistenţă este proporţională în acest caz de oscilaţie cu viteza
unghiulară de înclinare a navei, şi se poate exprima printr-un moment RM care se
opune mişcării de tangaj, dat de relaţia (2.46):
NM R 2 , (2.61)
unde N2 este coeficient de proporţionalitate (coeficient de amortizare).
Coeficientul de amortizare datorat efectului apei în timpul oscilaţiei longitudinale, se
calculează cu metoda fâşiilor sau cu relaţii empirice. Astfel coeficientul de amortizare se
calculează cu formula lui Van-der-Fleet :
GyIkN 25,0 , stm /2 (2.62)
unde:
GyI este momentul de inerţie al suprafeţei plutirii, în raport cu axa transversală
Gy ;
2k smt 2/ este factor de proporţionalitate care se calculează cu relaţia:
wAMck /2 52 , (2.63)
este greutatea specifică a apei;
M masa navei;
5c coeficient adimensional 1,05 c pentru amplitudini mici şi 225,05 c
pentru amplitudini mari.
Ecuaţia diferenţială a mişcării:
02 2 p , (2.64)
unde s-a notat factorul de amortizare:
yy yy
N
I I
. (2.65)
Dacă se notează:
Capitolul II. – Oscilaţiile navei 69
rpp 2
122 , (2.66)
pulsaţia oscilaţiei longitudinale amortizată, liberă, se obţine legea de mişcare sub forma
armonică:
rr'Ar
ttpcose
. (2.67)
În relaţia (2.67) s-au notat expresiile:
2
' 2 0 00Ar
rp
; (2.68)
0 0
0r
r
arctgp
, (2.69)
care reprezintă amplitudinea iniţială a mişcării, respectiv faza iniţială a oscilaţiilor
longitudinale amortizate pe apă liniştită.
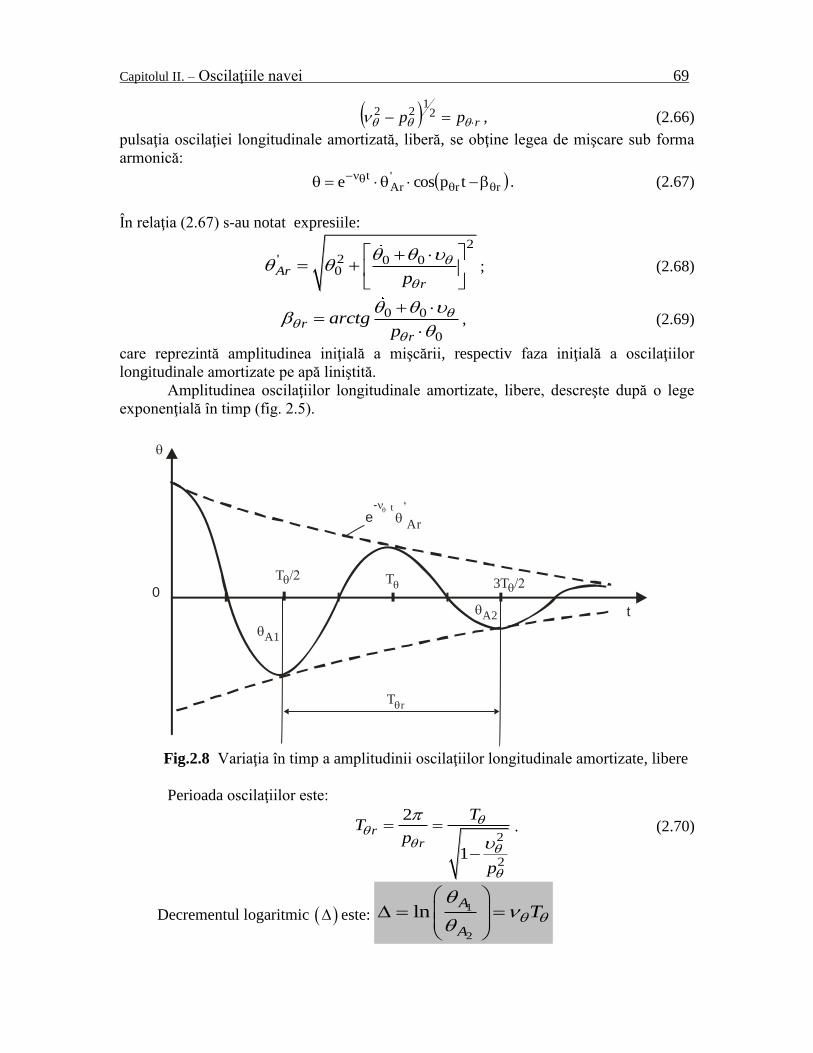
Amplitudinea oscilaţiilor longitudinale amortizate, libere, descreşte după o lege
exponenţială în timp (fig. 2.5).
t
Tr
A1
A2
0
T T 3T
e-
t
’
Ar
Fig.2.8 Variaţia în timp a amplitudinii oscilaţiilor longitudinale amortizate, libere
Perioada oscilaţiilor este:
2
2
2
1
rr
TT
p
p
. (2.70)
Decrementul logaritmic este: 1
2
lnA
A
T

COMPLEMENTE DE DINAMICA NAVEI
factorul de amortizare se calculează cu relaţia
22
1
p
. (2.71)
Timpul de amortizare a oscilaţiilor t, se determină cu relaţia:
nt n T
. (2.72)
2.3 Oscilaţia de tangaj pe valuri regulate în coordonate absolute
Soluţia particulară (legea de mişcare) este de forma:
cosA t . (2.73)
Expresia amplitudinii mişcării
2222 41
xx
GMg
M
L
AP
A . (2.74)
Defazajului dintre mişcarea de oscilaţie şi excitaţie
2
2
1
xtg
x
. (2.75)
cu notaţiile:
p
- coeficient de amortizare adimensional;
xp
- pulsaţia relativă a valului sau factor de acordaj,
unde L
APst
GMg
M
reprezintă unghiul de înclinare sub acţiunea statică a
amplitudinii momentului perturbator, iar .
2
2 2 2
1,
1 4x x
este factorul de
amplificare.
Graficele de variaţie ale mărimilor x (fig. 2.9) şi x (fig. 2.10).

Capitolul II. – Oscilaţiile navei 71
1
1
< <
X
< <
Fig. 2.9 Dependenţa factorului de amplificare de pulsaţia relativă a valului
2
0x1
Fig. 2.10 Dependenţa defazajului de pulsaţia relativă a valului
La tangajul pe mare agitată prezintă interes oscilaţiile forţate, deoarece oscilaţiile
libere se amortizează rapid datorită rezistenţei mari opusă de masa de apă antrenată. Axa
de oscilaţie la tangaj nu coincide, de regulă, cu axa transversală yG . Poziţia axei de
tangaj depinde de formele navei.

COMPLEMENTE DE DINAMICA NAVEI
3. OSCILAŢIILE VERTICALE
Este o mişcare periodică de translaţie pe verticală a navei considerată corp rigid,
sub acţiunea forţelor hidrostatice, hidrodinamice din hulă şi a forţei de inerţie a navei.
Considerăm o navă pe plutire dreaptă (fig. 2.11), asupra căreia acţionează o forţă
verticală orientată de sus în jos. Sub acţiunea acestei forţe creşte pescajul navei cu d ,
linia de plutire devine 1 1W L şi este paralelă cu plutirea iniţială. Şi în acest caz rămân
valabile ipotezele admise la studiul mişcărilor de ruliu şi tangaj
Dacă această forţă încetează atunci nava începe să execute oscilaţii verticale, de o
parte şi de alta a liniei de plutire iniţială WL.
WVLVW
L
y
z
iaF
iNF
W L
G
O
zzV
Fp
Fg
FR
Fig. 2.11 Forţele care acţionează asupra navei, la oscilaţia verticală
Asupra navei, în timpul oscilaţiilor, acţionează următoarele forţe:
Forţa de greutate, aplicată în centrul de greutate G:
gFg ; (2.76)
Forţa de flotabilitate, aplicată în centrul de carenă B:
p W VF V A z z ; (2.77)
Forţa de inerţie care acţionează asupra masei navei, care se aplică în centrul de
greutate G:
iNF M z ; (2.78)
Forţa de inerţie a masei de apă antrenată:
ia VF M z z ; (2.79)
Forţa de rezistenţă a apei, proporţională cu viteza relativă de afundare:
2R z VF N z z . (2.80)
S-a notat cu 2 zN [t/s] coeficientul de proporţionalitate, M masa navei, M masa apei
antrenată în mişcare.
Ecuaţia valului raportat la sistemul Gxyz este de forma:

Capitolul II. – Oscilaţiile navei 73
cosV A ez h t , (2.81)
unde Ah este amplitudinea valului, iar e frecvenţa de întâlnire a valului.
Ecuaţiile diferenţiale ale oscilaţiei verticale, în coordonate absolute şi relative se
scriu sub forma:
1 2 cosz W PA e zVM z N z A z F t ; (2.82)
.. .
1 2 ' cosz W PA eM z N z A z F t , (2.83)
unde:
2 22 2PA A W e z eF h A M N , este amplitudinea forţei
perturbatoare la oscilaţiile în coordonate absolute;
2'PA A eF M h , este amplitudinea forţei perturbatoare, la oscilaţiile în
coordonate relative;
2
2 z ezV
W e
Ntg
A M
, reprezintă defazajul dintre forţa perturbatoare şi
mişcarea valului.
3.1 Studiul oscilaţiilor verticale, neamortizate pe apă liniştită
Din ecuaţia de mişcare în forma simplificată:
1 2 cosz W A W eM z N z A z h A t , (2.84)
se obţine:
1 WM z A z o . (2.85)
Pulsaţia oscilaţiilor verticale libere, neamortizate:
1
Wz
Ap
M
. (2.86)
Legea de mişcare sub formă armonică:
cosA z zz z p t , (2.87)
în care s-au notat:
2
2 00A
z
zz z
p
, amplitudinea mişcării, (2.88)
0
0z
z
zarctg
z p
, (2.89)
faza iniţială a oscilaţiei libere neamortizată.
Masa apei antrenată în mişcare se poate calcula cu formule empirice, aproximative:
2
2
2
2
L
L
M C y x dx
, (2.90)

COMPLEMENTE DE DINAMICA NAVEI
unde y este semilăţimea la plutirea navei în secţiunea x, C este coeficient pentru
secţiunile Lewis, determinat grafic funcţie de raportul B
d, coeficientul de fineţe al
secţiunii transversale şi funcţie de frecvenţa de întâlnire a valului, prin expresia 2
2
e B
g
Perioada oscilaţiilor verticale este:
122z
z W
MT
p A
. (2.91)
Practic, perioada proprie zT se determină direct folosind formula empirică:
z zT k T , (2.92)
unde factorul zk este dat de expresia:
4,02 2,531
WBz
W W
CC Bk
C C T
, (2.93)
WC este coeficientul de fineţe al suprafeţei de plutire, iar BC este coeficientul bloc.
3.2 Studiul oscilaţiilor verticale, cu amortizare pe apă liniştită
Amplitudinea oscilaţiei verticale nu este constantă, deoarece oscilaţiile se
amortizează datorită rezistenţei pe care o întâmpină corpul navei din partea apei. Această
rezistenţă este proporţională cu viteza liniară z de oscilaţie a navei, şi se poate exprima
prin relaţia:
2R zF N z , (2.94)
unde 2 zN este coeficient de proporţionalitate (coeficient de amortizare).
Coeficientul de amortizare datorat efectului apei în timpul oscilaţiei verticale, se
calculează cu metoda fâşiilor. Astfel, coeficientul de amortizare pe unitatea de lungime se
determină cu relaţia: 2
32 ,zn
e
g AN
(2.95)
unde:
este densitatea apei de mare;
e pulsaţia de întâlnire dintre navă şi valuri;
A factor ce se determină grafic funcţie de coeficientul de fineţe al suprafeţei
transversale, raportuln
n
d
B şi pulsaţia de întâlnire prin relaţia
2
2
e nB
g
. Acest factor este
invers factorului de amplificare a mişcării şi reprezintă raportul dintre amplitudinea
valului şi amplitudinea mişcării.
Coeficientul total de amortizare, utilizând teoria fâşiilor, se determină din expresia:

Capitolul II. – Oscilaţiile navei 75
2 2z znN N dx . (2.96)
Ecuaţia diferenţială a mişcării devine:
2 0z WM M z N z A z . (2.97)
S-a introdus notaţia:
z
z
N
M M
, (2.98)
ce reprezintă factorul de amortizare.
Soluţia ecuaţiei diferenţiale este sub forma armonică:
' cosztAr zr zrz e z p t
. (2.99)
În relaţia (2.99) s-au notat expresiile:
2
' 2 0 00
zAr
zr
z zz z
p
; (2.100)
0 0
0
zzr
zr
z zarctg
p z
, (2.101)
amplitudinea iniţială a mişcării şi faza iniţială a oscilaţiilor verticale amortizate pe apă
liniştită.
Amplitudinea oscilaţiilor verticale amortizate, libere descreşte după o lege
exponenţială în timp (fig. 2.12).
t
Tzr
zA1
zA2
0
Tz Tz 3Tz
e-z t
z’
Ar
z
Fig. 2.12 Variaţia în timp a amplitudinii oscilaţiilor verticale amortizate, libere
Oscilaţia verticală este o mişcare oscilatorie armonică amortizată, având pulsaţia:
1
2 2 2zr z zp p , (2.102)
COMPLEMENTE DE DINAMICA NAVEI
şi perioada: 2
2
2
1
zzr
zr z
z
TT
p
p
. (2.103)
Amplitudinea descreşte la o perioadă de timp cu valoarea decrementului logaritmic:
1
2
ln Az z
A
zT
z
. (2.104)
Factorul de amortizare z se obţine cu relaţia:
22
1
zz
p
. (2.105)
Timpul de amortizarea a oscilaţiilor t se determină cu relaţia:
nz
z
t n T
. (2.106)
3.3 Oscilaţia verticală pe valuri regulate în coordonate absolute
Se consideră o navă pe valuri având unghiul de întâlnire .
Ecuaţia diferenţială a mişcării în forma simplificată este:
2 22 cosz z z A ez z p z p h t . (5.184)
Soluţia particulară 2z este de forma:
2 cosA e zz z t . (5.186)
Expresia amplitudinii mişcării:
2
2 2 21 4
AA
z z z
hz
x x
. (5.190)
Expresia defazajului dintre mişcarea de oscilaţie şi excitaţie:
2
2
1
z zz
z
xtg
x
, (5.191)
unde se notează:
zz
zp
- coeficient de amortizare;
e
zz
xp
- pulsaţia relativă a valului sau factor de acordaj.
. Deoarece oscilaţia naturală se amortizează în timp, legea oscilaţiei forţată stabilizată
este: 2 cosA e zz z z t . (5.192)
Factorul de amplificare z este dat de relaţia:

Capitolul II. – Oscilaţiile navei 77
2
2 2 2
1
1 4
Az
Az z z
z
hx x
. (5.193)
În activitatea practică, interesează în mod deosebit amplitudinea şi defazajul
mişcării oscilatorii. În acest sens se vor reprezenta graficele de variaţie ale mărimilor
z zx (fig. 2.13) şi z zx (fig. 2.14).
z
1
1
z
z
z
z
< << <z z z
1
< << <
xz
Fig. 2.13 Dependenţa factorului de amplificare de pulsaţia relativă a valului
2
0xz1
zz z
z
2
01
Fig.5.14 Dependenţa defazajului de pulsaţia relativă a valului

COMPLEMENTE DE DINAMICA NAVEI
Probleme rezolvate
PR 2.1 O navă cu lungimea de mLWL 4,152 înaintează printr-o serie de valuri
regulate cu un unghi 050 faţă de linia crestei valurilor. Prova navei întâlneşte valuri
succesive la fiecare sec15 , iar timpul în care creasta valului trece de la prova la pupa este
de sec10 . Să se afle viteza navei.
Rezolvare:
Componenta vitezei în direcţia valului este:
cosv .
Aşadar, viteza relativă a navei pe val în direcţia drumului valului este:
cosvc .
Dacă t este intervalul de timp al crestei unui val, observat la prova şi la pupa,
perpendicular pe direcţia înaintării valului (deplasării valului), atunci:
lungimea de întâlnire
viteza relativã a navei fata de valt ;
svc
t 10cos
cos~
,
de unde:
98cos4,15210)cos( vc m/s;
8,9)cos( vc m/s.
Dacă eT este intervalul de timp dintre două creste succesive, observate la prova şi la
pupa, atunci perioada de întâlnire este:
valde fatã navei a relativã viteza
valuluilungimeaeT ,
sau:
svc
Te 15cos
~
,
de unde:
15 9 8 147 eT ( c v cos ) , m .
Aşadar viteza aparenta a valului este:
smg
c /15,152
~
şi rezultă:
ndsmc
v 18,16/327,8cos
8,9
.

Capitolul II. – Oscilaţiile navei 79
PR 2.2 O navă cu lungimea de mLWL 150 are un deplasament de t12500 şi
o rază de inerţie în jurul axei longitudinale mixx 10 . Înălţimea metacentrică transversală
este mGM T 6,1 . Să se calculeze perioada de ruliu normal şi amortizat, dacă
coeficientul de amortizare a ruliului se presupune a fi s
tmN
2
1200002 şi masa de apă
adiţională este de 20% din masa navei.
Rezolvare: Pulsaţia proprie pentru oscilaţiile neamortizate se calculează cu relaţia (2.13) :
1
2221
36,0102,1
6,181,9
2,12,1
s
i
GMg
i
GMg
I
GMgp
xx
T
xx
T
xx
T .
Perioada oscilaţiilor de ruliu neamortizate (2.17) este:
sp
T 45,1736,0
22
.
Factorul de amortizare (2.22) este:
1
21
04,010125002,12
120000
sI
N
xx
.
Perioada ruliului amortizat rezulta din(2.27):
.55,17
36,0
04,01
145,17
1
1
22s
p
TT r
PR 2.3 Se cunosc următoarele caracteristici ale navei: deplasamentul t20000 ,
înălţimea metacentrică transversala mGMT 2,1 , perioada oscilaţiilor de ruliu
neamortizată sT 20 . Să se calculeze noua perioada de ruliu a navei, când o masă
m=600t se debarcă dintr-un punct situat la 12m deasupra centrului de greutate a navei. Se
consideră că înălţimea metacentrică nu se modifică şi că xxxx II 2,0 .
Rezolvare:
Din relaţia (2.18) rezultă:
9,2385505)2(
2,12000081,920
)2( 2
2
2
2
1
Txx
GMgTI [tm
2].
Din relaţia xxxx II 2,0 rezultă momentul de inerţie al navei:
5,19879212,1
9,2385505
2,1
1 xxxx
II [tm
2].
După ridicarea greutăţii (Fig. 2.15), se calculează noul moment de inerţie al navei:

COMPLEMENTE DE DINAMICA NAVEI
W L
y
z
G
G
xxr
KG
m
Fig. 2.15
5,1901521126005,1987921 22' xxxxxx rmII [tm2].
Poziţia centrului de greutate se modifică pe verticală cu:
mm
rmKG xx 371,0
60020000
12600)(
,
iar noul moment de inerţie faţă de noua axă longitudinală este:
3,1898849371,0194005,1901521)()()( 22'' GKmII xxGxx [tm
2].
Momentul de inerţie al navei şi al apei adiacente devine:
2,2278619)(2,1)( '1 GxxGxx II [tm2].
Perioada modificată este:
.86,192,11940081,9
2,22786192
)(
)(2 '1' s
GMmg
IT
T
Gxx
PR 2.4 O navă are raza de inerţie mixx 9 , iar înălţimea metacentrică
transversală mGMT 47,1 la un deplasament t15000 . Dacă coeficientul de
amortizare este s
tmN
2
500002 , nava oscilând pe apă liniştită, să se determine
amplitudinea oscilaţiilor după trei perioade de oscilaţie. Nava la momentul iniţial (t=0), a
fost înclinată la 00 7 , iar viteza iniţială zero. Se consideră momentul de inerţie al
masei de apă antrenată în mişcare 20% din momentul de inerţie al navei.
Rezolvare:
Cu relaţia (2.11) se calculează momentul de inerţie al navei:
1215000915000 2 xxI [tm2],
iar momentul de inerţie total adăugând şi masa adiacentă este:
12150002,12,11 xxxx II [tm2].
Pulsaţia oscilaţiilor transversale libere, neamortizată este (2.13):

Capitolul II. – Oscilaţiile navei 81
1385,01458000
47,11500081,9
sp .
Factorul de amortizare este dat de relaţia (2.22):
,017,014580002
50000 1
s
iar pulsaţia oscilaţiilor transversale libere, amortizate (2.23):
12222 384,0017,0385,0 spp r .
Perioada oscilaţiilor amortizate (2.27) este:
sp
Tr
r 36,16384,0
22
.
Decrementul logaritmic (2.28) este:
385,0
2017,0
2
pT 0,278.
Amplitudinea oscilaţiilor după trei perioade de oscilaţie este:
00278,030
33 04,37 ee AA .
PR. 2.5 La o navă se cunosc: sT 15 , ndv 35 , .270mLWL Să se determine
unghiul relative dintre navă şi val )( când amplitudinea oscilaţiei transversale este
maximă.
Rezolvare: Valoarea maximă a amplitudinii apare la rezonanţă când ep .
Pulsaţia navei :
,419,015
22s
Tp
iar pulsaţia valului pentru ape adânci se calculează cu:
,477,0270
81,92~
2 1
sg
în care s-a considerat cazul critic WLL~
.
Pulsaţia de întâlnire dintre navă şi valuri se determina cu (2.20), la rezonanţă ep ,
din care rezultă:
139,0514,350477,0
81,9)419,0477,0()(cos
22
v
ge
,
iar 00 8282139,0arccos sau .

COMPLEMENTE DE DINAMICA NAVEI
PR. 2.6 O navă întâlneşte valuri la travers cu lungimea m180~ şi amplitudinea
pantei .50A Care este amplitudinea oscilaţiei transversale pe val dacă perioada
pulsaţiei de oscilaţie este sT 15 . Mişcarea se consideră neamortizată şi forţată.
Rezolvare: Nava oscilează după legea de mişcare dată de (2.35):
).sin( tA
Pulsaţia valului este dată de relaţia:
.585,0180
81,92~
2 1
s
Pulsaţia navei:
.419,015
22 1 sT
p
Pulsaţia relativă a valului este:
396,1419,0
585,0
px .
Amplitudinea mişcării se obţine din relaţia (2.36) cu neglijarea amortizării:
.3,5396,11
5
1
0
2
0
2
x
AA
PR. 2.7 O navă cu viteza ndv 20 se deplasează faţă de direcţia valului cu un
unghi 0150 . Caracteristicile navei sunt: mLWL 135 , mixx 9 , mGMT 8,1 ,
t12500 , coeficientul de amortizare 1170002 N [tm2/s], masa adiacentă antrenată
în mişcare reprezintă 20% din masa navei.
Să se calculeze amplitudinea maximă a oscilaţiei de ruliu dacă amplitudinea
valului este mAV 9 şi pulsaţia valului 1312,0 s .
Rezolvare: Perioada proprie de oscilaţie a navei este (2.18):
.425,092,1
81,98,1
2,1
1
221
s
i
GMg
I
GMgp
xx
T
xx
T
Factorul de amortizare se calculează din (2.22):
.048,09125002,12
117000
2
1
21
sI
N
xx
şi coeficientul de amortizare:
.113,0425,0
048,0
p
Expresia factorului de acordaj pentru care se obţine maximul factorului de amplificare
este:

Capitolul II. – Oscilaţiile navei 83
,21 2 x
şi se obţine .987.0113,021 2 x
Factorul de amplificare se determină din (2.38) înlocuind pe x şi :
.45,4
987,0113,04)987,01(
1)(
2222max
Lungimea valului se calculează cu relaţia:
mg
633312,0
81,922~
22
,
iar amplitudinea pantei valului cu (2.32’):
radAVA 089,0633
29~
2
.
Amplitudinea oscilaţiei transversale amortizată, forţată, maximă este dată de relaţia (2.38)
radAAA 198,0150sin089,045,4sin)()()( 0max
'maxmax
)34,11( 0 .
PR 2.8 Se dau: mLWL 4,152 , miyy 1,381
38.1yyk m , mGM L 4,152 ,
15000t . Dacă momentul de inerţie al masei adiţionale este aproape 90% din
momentul de inerţie al masei navei, aflaţi perioada naturală de tangaj.
Rezolvare:
Pulsaţia oscilaţiei de tangaj se determină cu (2.56) :
1yy
L
I
GMgp
,
unde:
413708851,38150009,19,1 221 yyyy iI [tm
2].
Aşadar:
1
1
736,041370885
4,1521500081,9
sI
GMgp
yy
L
şi perioada
sp
T 52,8736,0
22
.
PR 2.9 Pentru nava prezentată la problema PR 2.8, să se determine mişcarea de
tangaj, dacă coeficientul de amortizare în timpul mişcării de tangaj este 74752202 N
[tm2/s] şi condiţiile iniţiale sunt: 0
0 5 şi 00
tdt
d.

COMPLEMENTE DE DINAMICA NAVEI
Rezolvare:
Ecuaţia de mişcare pentru tangaj amortizat în apă calmă este dată de (2.67):
)cos('rrAr
ttpe
.
Legea de variaţie a vitezei:
)cos()sin()( ''rrAr
trrrAr
ttpetppe
dt
d
.
Din relaţia (2.65) se determină factorul de amortizare:
091,01,38150009,12
7475220
2
s
-1,
din (2.66) pulsaţia oscilaţiei longitudinale cu amortizare:
,731,0091,0736.0 122 sp r
iar perioada din (2.70):
sp
Tr
6,8731,0
22
.
La st 0 , 0
0 5 avem:
rArrAr cos)cos(5 ''0 şi
rArrrArt
pdt
d
cos)sin()(0 ''
0
,
din care rezultă:
123,0731,0
091,0
rr
ptg
respectiv radr 005,1 sau 058,57r .
Amplitudinea este:
.32,958,57cos
5 0
0
0' Ar
Ecuaţia mişcării de tangaj poate fi scrisă:
)005.173,0cos(32,9 0091,0 te t [grade].
PR 2.10 Să se arate că între perioada de oscilaţie verticală a navei şi cea a
modelului realizat la scară, există relaţia zmzn TT .
Rezolvare: Perioada oscilaţiei verticale neamortizată a navei se calculează cu (2.91):
W
nB
nWLnW
nnWLnB
nWL
n
nWL
nzn
C
dCc
BLCg
dBLCc
Ag
Mc
Ag
MT
2222
1
.
Perioada oscilaţiei verticale neamortizată a modelului este dată de:

Capitolul II. – Oscilaţiile navei 85
W
mB
mWLmW
mmWLmB
mWL
m
WL
mzm
C
dCc
BLCg
dBLCc
Ag
Mc
Ag
MT
m
2222
1
unde c este raportul dintre M1 şi M.
Dacă se notează raportul dintre dimensiuni cu m
n
d
d se obţine zmzn TT .
PR.2.11 La o navă se cunosc următoarele mărimi: mLWL 128 , mB 07,17 ,
md 1,6 , WB CC , greutatea adiţională %90 din greutatea navei. Presupunând că nu
există amortizare, se cere:
a) Perioada oscilaţiilor verticale în apă calmă;
b) Expresia oscilaţiilor verticale în apă calmă dacă deplasarea iniţială faţă de poziţia
de echilibru şi viteza mişcării de oscilaţie la momentul t=0 este 00 z , respectiv
smdt
dz
t
/68,10
;
c) Forţa maximă exercitată asupra punţii navei de către un vinci ce cântăreşte 4t;
d) Diagramele de variaţie a deplasării, vitezei şi acceleraţiei în timp.
Rezolvare:
a) Din (2.86) rezultă pulsaţia oscilaţiilor verticale neamortizate în apă calmă:
1
1
92,01,96,1
81,9
9,19,1
s
d
g
BdLC
BLCg
M
Agp
WLB
WLWWz
,
iar perioada se calculează cu (2.91):
.83,692,0
22s
pT
zz
b) Ţinând cont de condiţiile iniţiale la t=0, 00 z şi s/m,z 6810 , amplitudinea
mişcării (2.88) devine:
,s/m,,
,
p
zz
zA 821
920
6810
iar faza iniţială din (2.89) devine 2/z .
Legea de mişcare (2.87) devine, după înlocuire:
2920821 /t,cos,mz .
c) Forţa exercitată asupra vinciului se obţine suprapunând peste forţa de greutate
forţa de inerţie determinată de mişcarea de oscilaţie pe verticală:
2
2
dt
zdmmgFmgF i ;
zzzA tpcospzdt
zd 2
2
2
.
COMPLEMENTE DE DINAMICA NAVEI
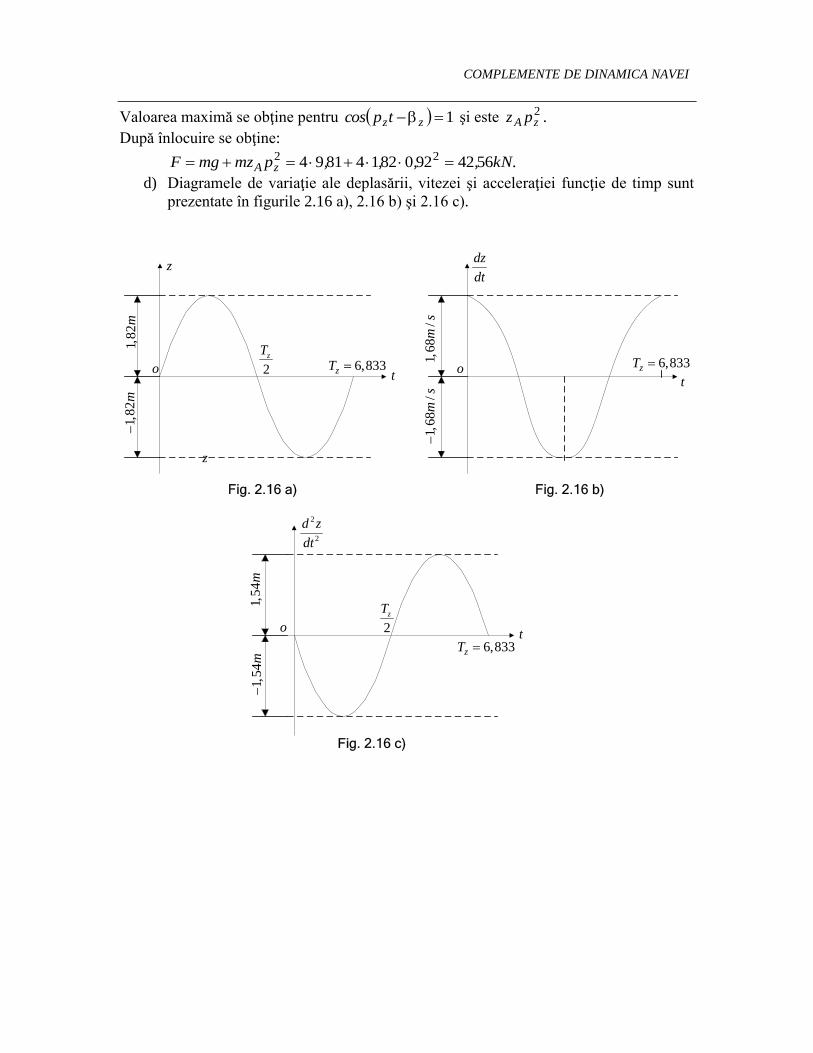
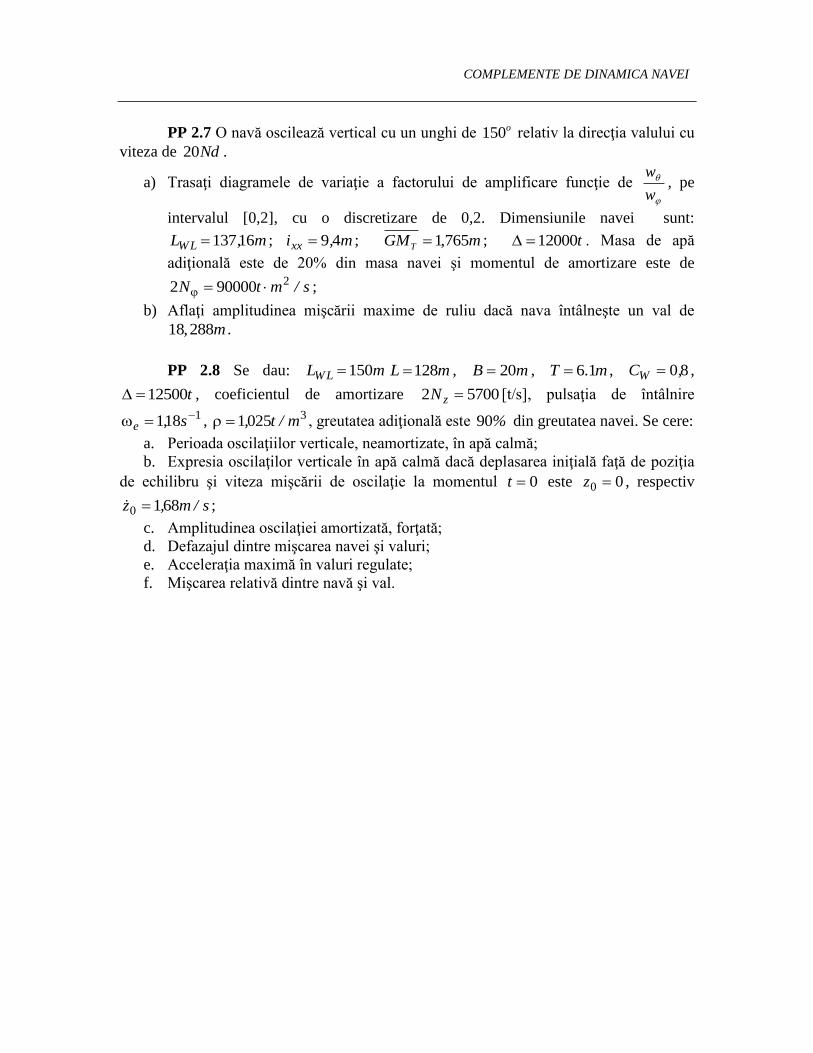
Valoarea maximă se obţine pentru 1 zztpcos şi este 2zA pz .
După înlocuire se obţine:
.kN,,,,pmzmgF zA 564292082148194 22
d) Diagramele de variaţie ale deplasării, vitezei şi acceleraţiei funcţie de timp sunt
prezentate în figurile 2.16 a), 2.16 b) şi 2.16 c).
1,82m
1,8
2m
dz
dtz
tt
oo 2
zT
6,833zT
1,68
/m
s1,
68
/m
s
6,833zT
1,54m
z
to 2
zT
6,833zT
Fig. 2.16 a) Fig. 2.16 b)
Fig. 2.16 c)
2
2
d z
dt
1,5
4m

Capitolul II. – Oscilaţiile navei 87
Probleme propuse
PP 2.1 Un val, la apă adâncă, are următoarele dimensiuni: m~
50 6.1wL m ,
m,AV 52 . Aflaţi viteza şi profilul valului.
PP 2.2 Se dau: t20000 , m,GMT 221 , s,T 212 . Calculaţi T când o masă
tm 500 este ambarcată de la 10m deasupra centrului de greutate. Se presupune că
TGM rămâne neschimbat şi că momentul inerţial de ruliu pentru masa ambarcată este de
30% din momentul de inerţie al masei navei.
PP 2.3 Ruliul unei nave (A) cu deplasament de t10000 are o perioadă de s10 şi o
înălţime metacentrică transversală de 1,5m. O altă navă de aceeaşi categorie (B) are un
deplasament de t12000 şi o înălţime metacentrică transversală de 1.3m . Distribuţia
greutăţilor, în ambele cazuri este similară în toate privinţele. Masa de apă adiţională
pentru ruliu este de 16% din masa navei.
a) Calculaţi perioada navei B fără masa apei adiţionale;
b) Calculaţi perioada navei B cu masa de apă adiţională.
PP 2.4 O navă are raza de inerţie (în jurul axei de ruliu) de 9,5m, o înălţime
metacentrică transversală TGM de 1,475m şi un deplasament de t15000 . Dacă
coeficientul de amortizare al ruliului N2 , are o valoare de 80000 [tm2/s], determinaţi
amplitudinea ruliului după zece oscilaţii complete, dacă nava a fost iniţial înclinată cu
100. Momentul de inerţie al masei de apă adiţională la ruliu este de 20% din cel al navei.
PP 2.5 O navă cu lungimea de mLWL 150 are un deplasament de t10000 şi
o rază de inerţie în jurul axei longitudinale mixx 8 . Înălţimea metacentrică transversală
este mGM T 6,1 . Să se calculeze perioada de ruliu normal şi amortizat, dacă
coeficientul de amortizare a ruliului se presupune a fi s
tmN
2
800002 şi masa de apă
adiţională este de 20% din masa navei.
PP 2.6 O navă oarecare a întâlnit două serii de valuri normale, din travers, cu
lungimi de 91.44m şi 182.88m , pe timpul unui voiaj pe mare. Dacă pantele maxime ale
valurilor în ambele cazuri sunt de 5o , care sunt amplitudinile mişcărilor de ruliu în cele
două cazuri, dacă perioada de ruliu a navei este de 15s? Mişcarea navei este neamortizată
şi forţată.
COMPLEMENTE DE DINAMICA NAVEI
PP 2.7 O navă oscilează vertical cu un unghi de 150o relativ la direcţia valului cu
viteza de 20Nd .
a) Trasaţi diagramele de variaţie a factorului de amplificare funcţie de
w
w, pe
intervalul [0,2], cu o discretizare de 0,2. Dimensiunile navei sunt:
m,LWL 16137 ; m,ixx 49 ; mGMT 765,1 ; t12000 . Masa de apă
adiţională este de 20% din masa navei şi momentul de amortizare este de
s/mtN 2900002 ;
b) Aflaţi amplitudinea mişcării maxime de ruliu dacă nava întâlneşte un val de
18,288m .
PP 2.8 Se dau: mLWL 150 128L m , mB 20 , 6.1T m , 80,CW ,
t12500 , coeficientul de amortizare 57002 zN [t/s], pulsaţia de întâlnire
1181 s,e , 30251 m/t, , greutatea adiţională este %90 din greutatea navei. Se cere:
a. Perioada oscilaţiilor verticale, neamortizate, în apă calmă;
b. Expresia oscilaţilor verticale în apă calmă dacă deplasarea iniţială faţă de poziţia
de echilibru şi viteza mişcării de oscilaţie la momentul 0t este 00 z , respectiv
s/m,z 6810 ;
c. Amplitudinea oscilaţiei amortizată, forţată;
d. Defazajul dintre mişcarea navei şi valuri;
e. Acceleraţia maximă în valuri regulate;
f. Mişcarea relativă dintre navă şi val.