Fuzzy
8
Universitatea Politehnica București, Facultatea de Automatică și Calculatoare Simularea conducerii bioproceselor prin tehnici de inteligență artificială - Raport final -
-
Upload
daniel-guta -
Category
Documents
-
view
281 -
download
2
Transcript of Fuzzy

Universitatea Politehnica București, Facultatea de Automatică și Calculatoare
Simularea conducerii bioproceselor prin tehnici de inteligență artificială
- Raport final -

Gheorghe Sârbu
Daniel Guță
Oana Niculae
Abstract – Bioprocesele sunt apreciate drept dificil de controlat datorită caracterului lor cu grad ridicat de neliniaritate și varianță în timp. Obiectivul acestui proiect a fost adoptarea unei metode de control adecvate și utilizarea acesteia în cadrul unui simulator de conducere a bioproceselor.
Cuvinte cheie – bioproces, control fuzzy, simulator
I. OBIECTIVE
În literatura de specialitate, sunt tratate trei tipuri de strategii de control: strategia clasică, bazată pe cunoașterea în prealabil a modelului, strategia bazată pe tehnici adaptative, de optimizare locală și strategia bazată pe tehnici de control inteligent, care folosește cunoștințele unui expert uman.
Obiectivul acestui proiect a fost implementarea unui simulator de conducere a unui bioproces pe baza unei strategii de control inteligent.
Mihail Dumitrache
Mircea Udrea
Victor Bordea
Pentru atingerea obiectivului final, a fost necesară stabilirea următoarelor obiective parțiale:
- Adoptarea unei strategii de control inteligent.
- Adaptarea strategiei de control inteligent la bioproces.
- Construirea unui modul software pentru implementarea controlului.
- Alegerea unor modele de simulare pentru bioproces.
- Implementarea unei interfețe vizuale pentru introducere și afișare de date.
- Introducerea de funcționalități suplimentare pentru a da ușurință de utilizare aplicației.
În cele ce urmează, mai întâi este descris procesul și sunt propuse modele matematice, apoi este prezentată soluția software aleasă pentru implementare.
II. BIOPROCESUL
Datele utilizate în cadrul aplicației provin de la un bioproces real. Dezvoltarea celulară a avut loc într-un bioreactor cu agitație mecanică, Bioengineering AG, cu un volum total de 100 L, din care volumul util de 42 L.
Principalii parametri de proces au fost: temperatura - menținută constantă la 37oC, pH-ul – controlat în limitele 7,3 și 7,8 și debit de aer/L de min 15.
Substratul a fost constituit din azot aminic (NNH2). Mediul de cultură utilizat – Organotech.
Datele preluate de la bioproces au fost:

a)DO – densitatea optică, direct proporțională cu dimensiunea concentrației de biomasă – X;
b)S – concentrația de substrat.
Controlul efectiv al bioprocesului s-a făcut prin adiție de substrat, a cărui concentrație poate fi determinată on-line.
III. MODELAREA BIOPROCESULUI
Pentru modelarea bioprocesului introducem o mărime specifică acestuia – viteza specifică de creștere - µ.
În aceste condiții, creșterea biomasei este dată de relația:
(1)
Această relație este utilizată sub forma unei ecuații cu diferențe pentru implementare software.
În bioreactor, substratul se consumă, rezultând biomasă, cu un randament Y:
(2)
În ceea ce privește variabila cheie µ, vom considera mai multe modele cinetice nestructurate.
A. =(S) Modele cinetice cu limitare a creșterii de către substrat, fără inhibiție (tip de cinetică cu saturație)
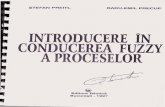
1. Monod
( ) maxS
S
K SS
(3)
unde : max = viteza maximă specifică de creștere [1/h];
KS = constanta de saturație [g/L].
Substrat
Vit
eza
spec
ific
a de
cre
ster
e [1
/h]
Figură 1. Dependeța cf. ecuației Monod
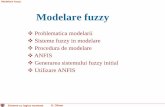
2. Teissier
( ) ( )maxS eS
KS
1 (4)
Vit
eza
spec
ific
a de
cre
ster
e [1
/h]
Substrat
Figură 2. Dependența cf. ecuației Teissier
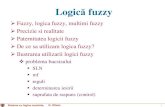
3. Moser
( ) maxS
S
K S
n
Sn
(5)
cu n>0.

Vit
eza
spec
ific
a de
cre
ster
e[1/
h]
Substrat
Figură 3. Dependența cf. ecuației Moser
B. =(X,S) Influența concentrației celulare și a concentrației substratului limitator de creștere asupra vitezei specifice
1. Contois
max
S
K X SX (6)
unde KX – constantă de inhibiție prin biomasă.
C. Cinetica cu inhibiție prin concentrația substratului
1. Andrews
max
1
1
1
1K
S
S
K
S
K S S
KS
i
S
i
(7)
unde: Ki = constante de inhibiție în raport cu substratul.
Substrat
Vit
eza
spec
ific
a de
cre
ster
e [1
/h]
Figură 4. Dependența cf. ecuației Andrews
2. Aiba
max,
S
K Se
S
S
K i S (8)
Substrat
Vit
eza
spec
ific
a de
cre
ster
e [1
/h]
Figură 5. Dependența cf. ecuației Aiba
3. Wayman-Tseng
max , ( )S
K SK S S
Si S C (9)
Concentrațiile de substrat mai mari decât o concentrație prag SC inhibă creșterea liniară.
IV.SISTEMUL DE CONTROL
Strategia de control inteligent are la bază un controller fuzzy care primește de la bioproces informații despre concentrația substratului și a biomasei, pe baza densității optice.

Pe baza acestei informații, controller-ul decide cantitatea de substrat care trebuie adăugată în bioreactor.
Așadar, sistemul fuzzy trebuie să coreleze cantitatea de substrat necesar a fi adăugată cu situația existentă în mediul de cultivare. Acest lucru înseamnă că intrările în controller sunt X și S, iar ieșirea este Aj – ajutajul de substrat necesar.
Structura controller-ului fuzzy este clasică:
-Două canale de intrare, pe care se aplică procedeul de fuzzyficare (pentru S și X). Rezultatul va fi încadrarea mărimilor în categoriile fuzzy S – small, M – medium și L – large.
-Motor de decizie (inference engine), care, pe baza unui tabel de reguli ”dacă – atunci”, va oferi o valoare fuzzy pentru mărimea de ieșire (ajutajul).
-Un canal de ieșire, pe care se aplică procedeul de defuzzyficare, prin metoda de centroid (pentru Aj). Rezultatul va fi o valoare efectivă pentru ajutaj, folosită apoi în control.
Modelarea bioprocesului s-a făcut sub formă discretă, ecuțiile diferențiale devenind ecuații cu diferențe.
Pe baza datelor experimentale s-au calculat constantele de proces – KS, Ki etc.
După determinarea constantelor de proces, s-au efectuat mai mulți pași de calcul. Astfel, tratând cazul general, la pasul k≥2 s-au făcut următoarele operațiuni:
1.calcul Xk=(1+µk-1)Xk-1;
2.calcul ;
3.introducere Sk și Xk în controller și obținerea Aj≥0;
4.Sk=Sk+Aj;
5.calcul conform fiecăruia dintre modele;
6.kk+1.
După finalizarea calculelor, se trasează graficele S=S(t) și X=X(t).
V.IMPLEMENTAREA
Soluția software aleasă pentru implementarea simulatorului a fost pachetul de programe MatLab®.
Alegerea este una avantajoasă din numeroase motive:
1. Facilități de lucru cu fișiere xls, atât la scriere, cât și la citire.
2. Posibilități de manipulare nativă a numeroase tipuri de date.
3. Funcții predefinite caracterizate de robustețe – rezistență la erori.
4. Funcții predefinite pentru crearea și afișarea de grafice.
5. Un editor de cod modern și prietenos cu utilizatorul.
6. Posibilitatea de a implementa o interfață grafică, perfect compatibilă cu pachetul de funcții folosite pentru a realiza simularea.
7. Nu în ultimul rând, existența opțiunii de exportare a simulatorului sub forma unei aplicații stand-alone.
Deoarece dezvoltarea s-a făcut utilizând tehnici de modularitate, se poate face o detaliere pe componente:
-controller-ul fuzzy este implementat în pachetul de funcții control.m;
-simularea este implementată în pachetul de funcții main.m;
-interfața este implementată în funcția generală PR1.m .
Interfața
Interfața aplicației oferă facilități sporite utilizatorilor.
Elementele care pot fi vizualizate pe interfață în timpul utilizării sunt următoarele:
1. Un buton de rulare a aplicației.2. Matrice pentru fuzzyficarea mărimilor
S și X – valori introduse de la tastatură.
3. Matrice fuzzy pe baza căreia operează motorul de decizie – valori selectate dintre opțiunile Z (zero), PM (positiv mic), PME (pozitiv mediu) și PMA

(pozitiv mare). O astfel de matrice este următoarea:
S X S M LS PM PME PMAM Z PME PMAL Z PM PME
4. Casetă pentru introducerea substratului optim, de pornire.
5. Posibilitate de a alege modelul care să fie simulat.
6. Butoane pentru testarea introducerii corecte a datelor și pentru realizarea simulării.
7. Două ferestre, în care se afișează graficele.
8. Seturi numerice cu valorile efective rezultate din simulare.
Pentru ușurința utilizării, facilitățile programului sunt sporite:
1. Buton pentru a salva datele din casete, matrice fuzzy și tipul de model, pentru a scuti utilizatorul de introducerea acelorași date la fiecare rulare a aplicației.
2. Buton pentru a introduce un set de date din cele salvate în interfață. Fișierele, create automat la apăsarea butonului de salvare, conțin în denumire data și ora la care au fost construite, pentru orientare ulterioară și pot fi ușor recunoscute după cuvântul ”intrare” plasat înainte de extensia xls.
3. Buton pentru salvarea datelor simulate, în cazul în care se dorește utilizarea acestora în alte aplicații. Fișierele cu date simulate au, de asemenea, data și ora în denumire, dar și cuvântul ”simulare” înainte de extensia xls.
VI. INDICATORI DE PERFORMANȚĂ
A. Indicatori de implementare
1.Funcționalitate interfață
Are în vedere gradul în care interfața vine în întâmpinarea dezideratelor impuse inițial –
prezența butoanelor obligatorii, a graficelor, dar și a facilităților suplimentare.
2.Funcționalitate regulator
Are în vedere gradul de reușită al implementării controller-ului fuzzy, dar și utilizarea acestuia în simulări preliminare, pentru analiza comportamentului.
3.Utilizare date experimentale
Are în vedere gradul de implementare software a folosirii fișierelor, dar și uzitarea datelor experimentale în determinarea parametrilor de proces.
4.Progres total
Are în vedere o sumare a celorlalți indicatori, dar ia în considerare și aspecte de ergonomie a aplicației.
VII.CONCLUZII
Structura de control implementată a avut drept obiectiv implicit, sporirea vitezei de reacție într-o astfel de manieră încât să maximizeze producția de biomasă, asigurând, simultan, și o consumare eficientă a substratului.
Soluția aleasă – controller fuzzy – s-a dovedit, prin simulările efectuate, a fi una eficientă, întrucât, în majoritatea sistemelor, producția de biomasă a fost mult sporită comparativ cu ceea ce se constatase experimental. Concomitent, ajutajele de substrat au dus, în final, la o consumare mult mai eficientă a acestuia.
BIBLIOGRAFIE
[1] Mihai Caramihai, Irina Severin, Quality Fed - Batch Bioprocess Control, A Case Study, 2009[2]Problematica conducerii bioproceselor[3]Puyin Liu, Hongxing Li, Fuzzy neural network theory and application, 2004[4]MathWorks Inc., Documentație MatLab®, 2009

![LOGICA FUZZY Logica fuzzy - bel.utcluj.ro · “Logica fuzzy nu este exact genul de termen pe care l-aţi folosi în literatura ştiinţifică […]. Mă gândesc că termenul a provocat](https://static.fdocumente.com/doc/165x107/5bb7c0bc09d3f2687f8b97c0/logica-fuzzy-logica-fuzzy-bel-logica-fuzzy-nu-este-exact-genul-de-termen.jpg)