FIinal Report

of 22
-
Upload
wasoncefree123 -
Category
Documents
-
view
227 -
download
0
Transcript of FIinal Report
-
8/12/2019 FIinal Report
1/22
REPORT
ON
Application Of Optimal Homotopy Asymptotic Method For Solving Non-Linear Differential
Equations Arising In Self Similar Motions in Gas Dynamics
Submitted in partial fulfillment of the
Lab Oriented Project
BY
ROHIT PUNTAMBEKAR
ID NO 2010B4A1461H
UNDER THE SUPERVISION OF
Dr. Addepalli Ramu
Professor, Mathematics Department
BIRLA INSTITUTE OF TECHNOLOGY & SCIENCE, PILANI
HYDERABAD CAMPUS
-
8/12/2019 FIinal Report
2/22
Contents
Chapter Topic Page no.
1 The Concept Of Self Similarity 3
2 Fundamental Equations 4
1.2 Boundary Conditions 5
2 Optimal Homotopy Asymptotic Method 7
2.2 Advantages Of OHAM 9
2.3 Working & Application Of OHAM 10
4.3 Solutions Obtained Using OHAM 12
4.5 Profiles 15
-
8/12/2019 FIinal Report
3/22
The Concept Of Self Similarity
Self-similar motions have large importance for gas dynamics. Inasmuch as in this case, gas-
dynamic quantities do not depend on coordinates and time separately, but depend only on
definite combinations of them, this decreases by one the number of independent variables in the
system of equations. In particular, during one dimensional motions, instead of two variables x
and t (or r and t in case of spherical or cylindrical symmetry) there appears one independent
variable (= x/t in our problem). Flow is described not by partial differential equations, but by
ordinary differential equations, which to a huge degree simplifies problem from the
mathematical point of view. There is an important class of phenomena in which scale symmetry
allows to reduce the number of independent variables of the problem. This happens because the
solution is similar to itself (self similar) if the variables are conveniently scaled. In gas dynamics,
fluid mechanics, in the physics of waves, as well as in many other fields of physics, one can find
many instances of self similarity
There exist two sharply different types of self-similar solutions. Solutions of the first type
possess the property that the index of self-similar a, and together with it, the exponents at t or H
in ' all scales, are determined from considerations of dimension or from ' laws of conservation.
The exponents are then fractions with integral numerators and denominators. In problems of this
type there always are two parameters with independent dimension
For self-similar motions the system of equations of gas dynamics in partial derivatives reduces to
a system of ordinary differential equations with respect to new unknown functions of self-similar
variables = r/R.
-
8/12/2019 FIinal Report
4/22
Fundamental Equations
For the beginning of the reading of time t = 0 we shall take the moment of focusing, when R = 0.
Then the time to the moment of focusing turns out to be negative. In connection with this, the
determination of the self-similar variable should be changed somewhat, putting
Formally, the solution, that we are seeking envelopes all space, up to infinity, so that the
intervals of change of variables are such:
(actually a self-similar solution is valid only in a region with a radius of the order of R, and at
long distances is somehow connected with the solution of a full non self-similar problem).
On the front of the shock wave Xi = 1. The speed of propagation of the front is directed to the
center, i.e., it is negative, D = -aR/|t| < 0.
-
8/12/2019 FIinal Report
5/22
We shall place the solution in equations of gas dynamics in self-similar form. The system
reduces to equations, in which v = 3, in accordance with the spherical symmetry of motion. The
scale of density in the problem is constant, p0 = const (this rather evident affirmation convinces
us in the examination of the boundary conditions on the frontof the shock wave).
Therefore, the member P0*/P0 in the first equation disappears and the bracket returns to zero.
The factors, depending on the scales, in equations reduce to the following constants:
We shall obtain a system of equations for the representatives:
For the purpose of simplification of the system we shall make a series of transformation. Let us
turn to the new representative functions P, G, V, connected with the old ones , g, v by formulas
(it is possible of course from the very beginning to find the solution of dimensional equations.
Further, we shall introduce, instead of pressure, a new unknown function, the square of the speed
of sound* and correspondingly let us turn to the representative of the square of the speed of
sound.
-
8/12/2019 FIinal Report
6/22
In dimensional variables .
After introduction of new variables, system obtains the form
This is a system of three ordinary first order differential equations with respect to three unknown
functions V,G,Z from Independent
variable .
-
8/12/2019 FIinal Report
7/22
Boundary Conditions
On the front of the shock wave the laws of conservation are carried out, which In a limiting case
of a strong shock wave give known relationships between gasdynamic magnitudes behind the
front and the speed of the front. Putting here the expressions of dimensional magnitudes through
representatives of and considering that on the front of the shock wave r - B, 1*1 and also taking
into account that D* = R*= aR/t, we obtain the boundary conditions for the representatives
when = 1
Hence, one could mention, it is immediately clear that the scale of density does not depend on
time or radius of the front. Representatives also obey the conditions to infinity. At the time of
focusing t = 0, speed, pressure, and speed of sound at any finite radius r are limited. But with t =
0 and finite r, = infinity. So that with t = 0 and final r the magnitude u = r/tV , c*c =
r*r(Z)/(t*t) are limited. It Is necessary that V and Z return to zero.
Thus, we obtain another condition, which should satisfy the solution: when = infinity:
-
8/12/2019 FIinal Report
8/22
Optimal Homotopy Asymptotic Method
Most engineering problems are inherently nonlinear. Except a limited number of these problems,
most of them cannot be analytically solved using traditional methods. Therefore, these nonlinear
equations should be solved using other methods. Some of them are solved using numerical
techniques and some are solved using the analytical method of perturbation. In the analytical
perturbation method, we should exert the small parameter and exerting it into the equation is the
difficulty of this method. The most representative perturbation methods used in nonlinear equations
are the LindstedtPoincare method, the method of multiple scales and the KBM method. The small
parameter plays a very important role in the perturbation method. It determines not only the accuracy
of the perturbation approximations but also the validity of the perturbation method itself. Therefore,
it is the small parameter that greatly restricts the application of the perturbation method. However, in
science and engineering, there exist many nonlinear problems which do not contain any small
parameter, especially those with strong nonlinearity. Various powerful mathematical methods have
been recently introduced to eliminate the small parameter :Tanh method , Jacobi elliptic function
method , A domain decomposition method , homotopy perturbation method and modified homotopy
perturbation method , homotopy analysis method , variational methods and iteration perturbation
method .
-
8/12/2019 FIinal Report
9/22
Advantages of OHAM
Optimal homotopy analysis method is a powerful tool for nonlinear differential equations. In this
method, the convergence of the series solutions is controlled by one or more parameters which can be
determined by minimizing a certain function. There are several approaches to determine the optimal
values of these parameters, which can be divided into two categories, i.e. global optimization
approach and step-by-step optimization approach. In the global optimization approach, all the
parameters are optimized simultaneously at the last order of approximation. However, this process
leads to a system of coupled, nonlinear algebraic equations in multiple variables which are very
difficult to solve. In the step-by-step approach, the optimal values of these parameters are determined
sequentially, that is, they are determined one by one at different orders of approximation. In this way,
the computational efficiency is significantly improved, especially when high order of approximation
is needed. In this paper, we provide extensive examples arising in similarity and non-similarity
boundary layer theory to investigate the performance of these approaches. The results reveal that
with the step-by-step approach, convergent solutions of high order of approximation can be obtained
within much less CPU time, compared with the global approach and the traditional HAM.
-
8/12/2019 FIinal Report
10/22
Optimal Homotopy Asymptotic Method - Working
Consider the differential equation
; (1)
where,L is a linear operator,x denotes independent variable, u(x) is an unknown function,g(x) is
a known function,N (u(x)) is a nonlinear operator andB is a boundary operator.
A family of equations is constructed using OHAM which is given by
=0(2)
Wherep [0, 1]is an embedding parameter, H(p) is a nonzero auxiliary function forp0 andH(0)
0, (x,p) is an unknown function, respectively. Obviously, whenp=0 andp 1, we have that
; (3)
Thus, asp increases from 0 to 1, the solution (x, p)varies from to the solution of
equation (20), Here is obtained from Eq. (21) forp=0as
, (4)
Auxiliary functionH(p) is chosen in the form
(5)
Where the constants c1, c2... can be determined later by the method of least squares.
Let us consider the solution of Eq. (1) in the form,
-
8/12/2019 FIinal Report
11/22
(6)
Now substituting into and equating the coefficients of like powers of p, we will obtain a set of
differential equations with boundary conditions. Solving the differential equation with boundary
conditions, zeroth, first, second order solutions u0(x), u1(x, c1), u2(x, c1, c2),. can be obtained.
Generally speaking the approximate solution of Eq. (1) can be determined as;
(7)
Then the constants ci, are obtained by substituting Eq. (7) into Eq. (1) which results
the following residual
(8)
If R=0, then will be the exact solution. In nonlinear problems this condition doesnt happen.
Hence, the optimal values of can be obtained by many methods like the method of
Least Squares, Galerkins Method, Ritz Method, and Collocation Method . We apply the Method
of Least Squares as shown below:
(9)
The constants can be evaluated using
(10)
Where a and b denote the domain of the problem.
-
8/12/2019 FIinal Report
12/22
Solutions Obtained Using OHAM
We obtain analytical solutions for v,g,z as functions of ,, later use = Log[]and values of , to
obtainV,G,Z as functions of().
Using residues for error minimization, obtaining Jacobian and on finding minima for the given domain,
we obtain two sets of valid constants c11,c12,c21,c22,c31,c32.
For each of the sets, we plot graphs ofV,G,Z against
-
8/12/2019 FIinal Report
13/22
The two sets of constants obtained and upon further substitution- V,Z & G obtained as functions of are
1.
{c11 0.3559583392594399,c12 0.431485141782589, c21 0.06060823809856086,
c22 5.873340599132868,c31 0.9412476295601941,c32 4.464210680937145}
: =12.001108311604632
3
1
41.0151083703151749(68.63629791659561 +
28.577322916325084 2.05032003413437373) +1
90.006279337062757205(1234.3526834621498 1135.2324385013198+
516.22033210932483 + 33189.916959959974 22621.9352010280455 +
9700.71648710916 1827.2305957867737 + 125.417199809755918 +
66.088535059564446Log[])
: =0.73862297849728052
+ 1
62.5753939278147864(2.3726230343729737 +
0.17160388360501183 + 0.267126565913207054) +1
80.0031396685313786017(155.2224227986237 22093.93179474778
181019.709709606482 23.184208128301693 + 980.03350594441714 +
12433.968671318825 1049.72098082690356 + 15.9182893380315997)
: =16.30969097075427
+
1
60.03616898148148149(300.9868385159958
230.6809790692164 + 44.9557569210693663
+ 66.007110473096874
+426.81667982567485) +
1
110.000004153000702881748(5249054.557843804 +
1.577251367023229 107 + 1.662017743634559 107 2 1008006.5756752043
1.604196893128407 107 4 2.838609717200912 107 5 1.038501508809438
107 6 525083.5987837247 + 2863311.6520007218 + 4377885.123670199 +
2369702.96927375910)
-
8/12/2019 FIinal Report
14/22
2.
{c11 0.16606466739863338,c12 0.24048962131901766,c21 0.7697135378673272,
c22 1.027203332489386, c31 0.0015349049570545503, c32 0.9937142330059539}
: =12.001108311604632
3
1.0151083703151749 (32.02078088325244 +7.025169405237548 0.9565324842161281 3)
4 +
1
90.006279337062757205(0.9390634272210505 + 0.8636553220765322
0.392727006443646333 + 7009.3418103740884 1078.59650172435255 +
2057.2358398031566 418.887936100807347 + 59.66523786259958
0.050278439107841696Log[])
: =0.7386229784972805
2 +2.5753939278147864 (30.131878554907185 2.179337933344791 3+0.5366490143917342 4)
6 +
1
80.0031396685313786017(3.2146190721559407 + 195946.68062212126
18617.7853256619422 0.48013937856620453 17642.0604567987764 +
10519.0171523188155 1969.77806803828056 94.313080116856827)
: =16.30969097075427
+
1
60.03616898148148149(0.4908232179689491 +
0.37617452320913625 0.073309947328665143 0.107638667959614194 +
450.96965841736235) + 1 11
0.000004153000702881748(13.958420363957657 +
249511.84694058629 + 344199.88044386042 2.6805169117327243
39782.510809463694 2807391.2618273755 2113559.961899536 +
3811.00533638873557 + 415714.12259913128 + 604217.55188369739 +
3706056.2738182810)
-
8/12/2019 FIinal Report
15/22
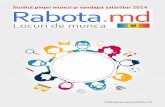
Profiles
Set 1
V vs
Z vs
G vs
1 2 3 4 5
0
50
100
150
1 2 3 4 5
600
500
400
300
200
100
0
1 2 3 4 5
20
10
0
10
20
-
8/12/2019 FIinal Report
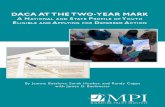
16/22
Set 2
V vs
Z vs
G vs
1 2 3 4 5
0
20
40
60
80
1 2 3 4 5
0
100
200
300
400
500
600
1 2 3 4 5
10
15
20
25
30
35
-
8/12/2019 FIinal Report
17/22
Solutions Obtained up-to the 1st order
ClearAll["Global`*"]
v:=(2 -3 )/(1+)-1/(4 (-1+) (1+)) -3 (8+7 c11-8 c11 +c11 4 -8 +6 c11 -8
c11 +2 c11 4 -c11 2+c11 4 2)
z:= (2 -2 2 (-1+) )/(1+)2+1/(1+)
22 -6 (c21 3 -c21 4 +c21 -3 c21 3
-4 +c21 4 +c21 5 +c21 3 -c21 4 -3 c21 3 +4 +2 c21 4
+c21 5 )
g:= ((1+))/(-1+)+1/(15 (-1+) (1+)
2) -4 (15 5 +45 5 -20 c31 2 2 +20
c31 5 2 -12 c31 3 +20 c31 2 3 +15 c31 3 3 -23 c31 5 3 +45 5
2+40 c31 2 2 2-40 c31 5 2 2+24 c31 3 2-40 c31 2 3 2-15 c31 3 3
2+31 c31 5 3 2+15 5 3-20 c31 2 2 3+20 c31 5 2 3-12 c31 3 3+20
c31 2 3 3-15 c31 3 3 3+7 c31 5 3 3+15 c31 3 3 4-15 c31 5 3 4)
:=0.717
:=1.4
v'=D[v,];
z'=D[z,
];g'=D[g,];
R1[ ,c11,c31]=((v'))+(3*(v))+(v-)*(g');
J1[c11,c31]=742.262_-5.50136 c31+0.0102761 c31
2+c11 (8765.32_-61.3551 c31+0.107268 c31
2)+c11
2
(27352.5_-181.583 c31+0.301571 c312)
v'=D[v,];
z'=D[z,];
g'=D[g,];
R2[ ,c11,c21,c31]= (2z)+(z')+(z)*(g')+ *(v)2+( 1.4*(v)*(v'))- **(v')-*(v);
J2[c11,c21,c31]=2.5674_+645.517 c11
3+1505.41 c11
4+c11
2(130.191_+c21 (461.096_-1.65395 c31)-0.192354
c31)+c11 (17.2574_+c21 (117.243_-0.426574 c31)-0.0620625 c31)-0.0170752c31+0.000030962 c31
2+c21 (17.806_-0.125337 c31+0.000226252 c31
2)+c21
2(49.0764_-
0.357092 c31+0.000656167 c312)
v'=D[v,];
z'=D[z,];
g'=D[g,];
R3[ ,c11,c21,c31]= ((-1)*z*(v-)*(g'))-((z')*(v-))+(z*(2-2v));
J3[c11,c21,c31]=0.0710687_-0.000453518 c31+1.1131810
-6c31
2+c21 (0.548908_-0.0051388
c31+0.0000119719 c312)+c21
2(2.08097_-0.0184805 c31+0.0000424945 c31
2)+c11 (0.415797_-
0.00350915 c31+7.3500310-6
c312+c21 (5.40427_-0.0454161 c31+0.0000964107 c31
2)+c21
2
(22.6083_-0.188214 c31+0.000398326 c312))+c11
2(0.937255_-0.00722757 c31+0.0000140266
c312+c21 (14.0595_-0.110511 c31+0.000218399 c31
2)+c21
2(65.0892_-0.513649
c31+0.00102287 c312))
0
Log5
R1 , c11, c31 R1 , c11, c31
0
Log5R2, c11, c21, c31 R2, c11, c21, c31
0Log5
R3, c11, c21, c31 R3, c11, c21, c31
-
8/12/2019 FIinal Report
18/22
d1=D[J1[c11,c31],c11];
d2=D[J1[c11,c31],c31];
e1=D[J2[c11,c21,c31],c11];e2=D[J2[c11,c21,c31],c21];
e3=D[J2[c11,c21,c31],c31];
f1=D[J3[c11,c21,c31],c11];
f2=D[J3[c11,c21,c31],c21];
f3=D[J3[c11,c21,c31],c31];
NSolve[{d1=d2=e1=e2=e3=e3=f1=f2=f30},{c11,c21,c31}]
{{c1147.2107,c21309.33,c31250.961},{c11-0.18366-0.0496561 ,c216.29002_-
0.317502 ,c315.36739_-0.257313 },{c11-0.18366+0.0496561 ,c216.29002_+0.317502
,c315.36739_+0.257313 },{c11-1.18351-0.00673161 ,c21-0.103-0.043042
,c310.186283_-0.0348826 },{c11-1.18351+0.00673161 ,c21-0.103+0.043042
,c310.186283_+0.0348826 }}
c11:=47.210741996090675`;
c21:=309.3301260222405`;c31:=250.9606265369797`;
:=Log[]v
0.5975/3-(0.186719 (631.312_-906.446 +271.934 4))/3
z
0.0999617/2+(0.348542 (221.79_-854.494 3+100.695 4+532.295 5))/6
g6. +(0.0289352 (-248.652-163.572 2+745.957 3-126.373 5))/4
V:=0.5975`/3-(1/3)0.18671875000000004` (631.3123724274586`_-906.446246324941`
+271.9338738974823` 4)
Z:=0.09996174999999995`/2+(1/6)0.3485416666666666` (221.78970035794643`_-
854.4935401238369` 3+100.69535890681914` 4+532.2952808590715` 5)
G:=Log[6.000000000000001` +(1/4)0.028935185185185196` (-248.65220871629754`-
163.57176909974987` 2+745.9566261488944` 3-126.37264833284644` 5)]
-
8/12/2019 FIinal Report
19/22
Plot[{V},{,1,5},FrameTrue,PlotRangeFull]
Plot[{Z},{,1,5},FrameTrue,PlotRangeFull]
Plot[{G},{,1,5},FrameTrue,PlotRangeFull]
1 2 3 4 5
250
200
150
100
50
0
1 2 3 4 5
0
10
20
30
40
50
60
1 2 3 4 5
2.50
2.55
2.60
2.65
2.70
2.75
-
8/12/2019 FIinal Report
20/22
Numerical Solutions Obtained Using RK-IV 0
function[tp,yp] = rk4sys(dydt,tspan,y0,h,varargin)% rk4sys: fourth-order Runge-Kutta for a system of ODEs% [t,y] = rk4sys(dydt,tspan,y0,h,p1,p2,...): integrates% a system of ODEs with fourth-order RK method% input:% dydt = name of the M-file that evaluates the ODEs% tspan = [ti, tf]; initial and final times with output% generated at interval of h, or% = [t0 t1 ... tf]; specific times where solution output% y0 = initial values of dependent variables% h = step size% p1,p2,... = additional parameters used by dydt% output:% tp = vector of independent variable% yp = vector of solution for dependent variablesifnargin
-
8/12/2019 FIinal Report
21/22
functiondy = dydtsys(t,y)% y(1) = velocity function (V)% y(2) = density function (G)% y(3) = pressure function (Z)
% a = small gamma (constant)% b = similarity exponent (alpha)a = 1.4; b = 0.717;delta = -y(3)+(y(1)-b)^2;
K = (y(1)*(y(1)-1)*(y(1)-b))-(b-1);L = (2*y(3))/a;delta1 = (3*y(1)*y(3))-(K*L);M = K/(y(1)-b);delta2 = (L*M)-(3*y(1)*(y(1)-b));N = (y(3)*(b-1))/(y(1)-b);P = L-(2*(y(1)-b)^2);Q = N*P;R = (a-1)*y(3)*y(1)*(3*b-2*y(1)-1);delta3 = Q+R-2*delta*y(3);
dy = [delta1/(t*delta);(y(2)*delta2)/(t*delta);delta3/(t*delta)];
a = 1.4; b = 0.717;y0 = [(2/(a+1))*b (a+1)/(a-1) (2*a*(a-1)/(a+1)^2)*b^2]
-
8/12/2019 FIinal Report
22/22
RK IV Order Profiles