
FEMM1r
56
Lucrarea 1 1. Aspecte studiate 1.1. Legile câmpului electromagnetic 1.2. Câmpurile magnetostatic şi magnetic staţionar 1.3. Metoda elementului finit 1.4. Exploatarea simetriilor. Probleme plan paralele şi probleme axi-simetrice 1.5. Prezentare generală a pachetului de programe FEMM 1.6. Calculul câmpului magnetic produs de o bobină cilindrică alimentată în c.c. 2. Legile câmpului electromagnetic Funcţionarea dispozitivelor electromagnetice au la bază legile câmpului electromagnetic. Forma locală a legilor câmpului electromagnetic exprimată în domenii cu corpuri imobile, fără suprafeţe de discontinuitate este prezentată mai jos: - legea inducţiei electromagnetice: rotE=− ∂ B ∂ t (2.1) - legea circuitului magnetic, rotH=J + ∂ D ∂ t (2.2) - legea conservării sarcinii electrice, divJ=− ∂ ρ v ∂ t (2.3)
-
Upload
ghinea-iuliana -
Category
Documents
-
view
217 -
download
4
description
8
Transcript of FEMM1r

Lucrarea 1
1. Aspecte studiate
1.1. Legile câmpului electromagnetic
1.2. Câmpurile magnetostatic şi magnetic staţionar
1.3. Metoda elementului finit
1.4. Exploatarea simetriilor. Probleme plan paralele şi probleme axi-simetrice
1.5. Prezentare generală a pachetului de programe FEMM
1.6. Calculul câmpului magnetic produs de o bobină cilindrică alimentată în c.c.
2. Legile câmpului electromagnetic
Funcţionarea dispozitivelor electromagnetice au la bază legile câmpului electromagnetic.
Forma locală a legilor câmpului electromagnetic exprimată în domenii cu corpuri imobile, fără
suprafeţe de discontinuitate este prezentată mai jos:
- legea inducţiei electromagnetice: rot E=−∂B
∂ t (2.1)
- legea circuitului magnetic, rot H=J +∂ D
∂ t (2.2)
- legea conservării sarcinii electrice, div J=−
∂ ρv
∂ t (2.3)
- legea fluxului electric, div D=ρv (2.4)
- legea conservării fluxului magnetic, div B=0 (2.5)
- legi de material: D = D(E); J = J(E); B = B(H) (2.6)
Legile de material pentru corpuri izotrope şi omogene, fără histerezis, fără polarizaţie şi
magnetizaţie permanente şi fără câmp electric imprimat, pot fi scrise sub forma:
D = E; J = E; B = H (2.7)
În cazul magneţilor permanenţi dependenţa B(H) se scrie: B=μ(H )⋅H+Br (2.8)
În relaţiile de mai sus simbolurile utilizate au următoarea însemnătate: E reprezintă
intensitatea câmpului electric, B reprezintă inducţia magnetică, H intensitatea câmpului

magnetic, J densitatea de curent, D inducţia electrică, v densitatea de volum a sarcinii electrice,
permitivitatea electrică, conductivitatea electrică, permeabilitatea magnetică, Br inducţia
magnetică remanentă.
3. Câmpurile magnetostatic şi magnetic staţionar
3.1. Câmpul magnetostatic. Un regim particular al câmpului electromagnetic este câmpul
magnetostatic specific problemelor în care există corpuri imobile, neparcurse de curent electric
de conducţie (J=0 ) ce pot prezenta o stare de magnetizaţie permanentă (ex. magneţi
permanenţi). Mărimile asociate regimului magnetostatic nu prezintă variaţii în timp (
∂∂ t
=0).
Ecuaţiile asociate regimului magnetostatic sunt:
rot H = 0 (3.1)
div B = 0 (3.2)
B = (H)H + Br (3.3)
Din (3.2) rezultă că inducţia magnetică B se poate scrie exprima cu ajutorul unei funcţii
auxiliare denumite potenţial magnetic vector A, prin relaţia:
B = rot A (3.4)
Astfel regimul magnetostatic se poate descrie prin ecuaţia diferenţiala cu derivate parţiale:
rot[(1/)(rot A – Br)] = 0 (3.5)
Pentru a asigura unicitatea soluţiei ecuaţiei (3.5) trebuie adăugată condiţia de etalonare
Coulomb care fixează divergenţa potenţialului magnetic vector A:
div A= 0 (3.6)
Sursa câmpului magnetostatic interioară domeniului de calcul este inducţia remanentă Br a
magneţilor permanenţi. Un flux magnetic impus pe o frontieră a domeniului de calcul poate
reprezenta de asemenea o sursă de câmp.
Unicitatea soluţiei ecuaţiei (3.5) este asigurată prin cunoaşterea domeniului de calcul, a
surselor de câmp, a proprietăţilor de material şi a condiţiilor pe frontiera domeniului de calcul.
Condiţiile uzuale impuse pe frontiere sunt de tip Dirichlet, A = ct. (adică în exterior se află un

material cu permeabilitate magnetică mult mai mică decât în interior), respectiv de tip Neuman,
∂A/∂n = 0, (adică în exteriorul domeniului de calcul se află un material cu permeabilitate
magnetică mult mai mare decât cea din interiorul domeniului de calcul). Condițiile pe frontiere
pot fi și de tip Robin (∂A/∂n + cA = 0), de tip ciclic, anticiclic etc. În cazul utilizării Metodei
Elementelor Finite (MEF) condiţia pe frontiere de tip Neuman este implicită. Rezolvarea unei
problemei de câmp presupune totodată şi definirea condiţiilor de trecere pe suprafaţe S de
discontinuitate a proprietăţilor fizice (conservarea componentei normale a inducţiei magnetice şi
a componentei tangenţiale a intensităţii câmpului magnetic B1n = B2n, Ht1 = Ht2).
3.2. Regimul de câmp magnetic staţionar. Regimul de câmp magnetic staţionar este
specific problemelor în care există corpuri imobile, ce pot fi parcurse de curent electric de
conducţie constant (J ≠ 0) (ex. bobine parcurse de curent constant), respectiv care pot prezenta o
stare de magnetizare remanentă invariabilă în timp (ex. magneţi permanenţi). Mărimile asociate
regimului magnetic staţionar nu prezintă variaţii în timp (/t = 0). Acest regim caracterizează
dispozitive în care sursa câmpului magnetic este constituită din bobine sau conductoare parcurse
de curent continuu şi/sau din magneţi permanenţi. Ecuaţiile asociate regimului magnetic
staţionar sunt:
rot H = J (3.7)
div B = 0 (3.8)
B = (H)H + Br (3.9)
Urmând acelaşi raţionament explicat mai sus regimul magnetic staţionar poate fi descris prin
ecuaţia diferenţială cu derivate parţiale:
rot[(1/)(rot A – Br)] = J (3.10)
Pentru a asigura unicitatea soluţiei ecuaţiei (3.10) trebuie adăugată condiţia de etalonare
Coulomb (div A= 0), respectiv trebuie cunoscute sursele de câmp, proprietăţile de material,
condiţiile pe frontiere, etc. după cum s-a explicat mai sus.
4. Metoda elementului finit
Cunoașterea câmpurilor electromagnetic şi termic în maşinile electrice permite
dimensionarea corectă a acestora, respectiv permite calculul performanţelor specifice în regimuri
de funcţionare permanente sau tranzitorii (ex. cupluri, curenţi, tensiuni, randamente, turaţii, etc.).
Problemele de câmp electromagnetic şi termic au la bază ecuații diferențiale cu derivate
parțiale specifice regimurilor studiate (regim magnetostatic, magnetodinamic, magnetic
tranzitoriu, termic staționar, termic tranzitoriu etc.), soluţionarea acestora făcând frecvent apel la
metode numerice precum: Metoda Elementelor Finite (MEF), Metoda Diferențelor Finite (MDF)
şi Metoda Elementelor de Frontieră (MEFr), etc.
Metoda numerică cea mai utilizată în inginerie în vederea rezolvării problemelor de calcul de
câmp este MEF. Această metodă se distinge prin flexibilitate şi generalitate permiţând abordarea
problemelor de calcul de câmp cu domenii neomogene şi neliniare. Analiza numerică a maşinilor
electrice presupune uneori utilizarea MEF în cuplaj cu MDF, de pildă pentru rezolvarea
problemelor de câmp în regim tranzitoriu în care derivata temporară este aproximată prin MDF.
4.1. Avantaje şi dezavantaje ale MEF. Principalele avantaje ale MEF sunt:
- Permite tratarea domeniilor neomogene şi neliniare;
- Algoritmul de calcul este relativ uşor de implementat în special în cazul elementelor finite
de ordin inferior;
- Grad sporit de generalitate; permite abordarea problemelor cu geometrii complexe;
- Rețeaua de discretizare poate fi îndesită local;
- Elementele finite nodale conduc deseori la matrice rare cu structură bandă permiţând
folosirea metodelor de calcul iterative performante;
- Se poate cupla cu MEFr;
- În cazul problemelor de regim tranzitoriu derivatele în timp pot fi tratate prin MDF;
- Post-procesarea mărimilor de câmp este ușor de efectuat.
Dezavantajele principale ale MEF sunt legate în principal de dificultăţile ce apar în
rezolvarea problemelor cu frontiere deschise (care necesită extinderea domeniului de calcul
pentru a obţine o precizie adecvată), respectiv de dificultăţile privind rezolvarea problemelor cu
medii în mişcare (care în unele cazuri implică refacerea reţelei de discretizare şi distorsionarea
acesteia).

4.2. Elemente de bază privind MEF. Se consideră o problemă de calcul de câmp definită pe
un domeniu de calcul V, descrisă de ecuaţia diferenţială cu derivate parţiale:
L = f (4.1)
unde L reprezintă operatorul diferenţial de ordinul n asociat problemei de câmp, este funcţia
necunoscută ce aparţine spaţiului de soluţii admisibile (denumită şi variabilă de stare), iar f este o
funcţie cunoscută pe domeniul de calcul, reprezentând sursa de câmp. Se consideră cunoscute
condiţiile pe frontierele ce mărginesc domeniul de calcul V.
MEF presupune în primul rând discretizarea domeniului de calcul în subdomenii disjuncte
denumite elemente finite, notate cu e unde e = 1…M, iar M este numărul total de elemente
finite. Elementele finite pot fi de pildă segmente în aplicaţii 1D, triunghiuri sau patrulatere în
aplicaţii 2D, tetraedre, prisme sau hexaedre în aplicaţii 3D.
Operaţia de discretizare în elemente finite a domeniului de calcul este foarte importantă
pentru o soluţionare corectă a unei probleme de câmp. Modul în care este construită reţeaua de
elemente finite influenţează necesarul de memorie, timpul şi precizia de calcul a soluţiei de
câmp. Reţeaua de discretizare în elemente finite trebuie îndesită în regiunile de interes şi
caracterizate de variaţii importante ale mărimii de stare (ex. întrefierul mașinilor electrice unde
se concentrează cea mai mare parte a energiei magnetice dezvoltate).
Exista algoritmi de rafinare locala automată a reţelei de discretizare (discretizare adaptivă) în
vederea obţinerii unei precizii suficient de bune a soluţiei de câmp cu un efort de calcul redus.
Se consideră că la nivelul fiecărui element finit variabila de stare prezintă o variaţie
polinomială de ordinul 1 sau 2 (rar se întâlnesc variaţii polinomiale de ordine superioare) în
funcţie de coordonatele spaţiale. Pe baza acestei ipoteze variabila de stare este reprezentată la
nivelul fiecărui element printr-o dependenţă de valorile sale necunoscute în nodurile reţelei de
discretizare şi de anumite funcţii cunoscute (funcţii de formă) ce depind de geometria
elementului finit.
Φ̄e=∑j=1
n
N je Φ j
e={ Ne }T { Φe }= {Φe }T {N e }(4.2)
unde n reprezintă numărul de noduri ale elementului (e), N je
este funcția de formă a elementului
(e), iar Φ̄ je
reprezintă valoarea aproximativă a funcţiei necunoscute în nodul j.

Prin aplicarea Metodei Variaționale (MV) sau a Metodei Reziduurilor Ponderate (MRP) se
obține un sistem de ecuații având ca necunoscute valorile variabilei de stare în nodurile
elementelor finite.
MV presupune asocierea unei funcţionale funcției necunoscute F prin a cărei minimizare
(F = 0) să se obţină soluţia care verifică atât ecuaţia de bază cât şi condiţiile la limită.
Conform acestei metode se alege un sistem complet de funcții de bază, liniar independente, N i,
cu i = 1, ..., n, iar soluţia exactă este aproximată prin:
Φ ≈~Φ=∑i=1
n
c i N i(4.3)
Coeficienții ci sunt determinați din condiția de minimizare a funcționalei ℑ(~Φ ).
MRP presupune în primul rând definirea reziduului pe baza funcţiei aproximative ~Φ prin
relaţia:
R(~Φ )=L~Φ -f (4.4)
Se alege un sistem complet de funcții de baza liniar independente, N i , i=1, ..., n, iar soluția
exactă este aproximată prin:
Φ ≈~Φ=∑i=1
n
c i N i(4.5)
Reziduul R are valoarea zero doar pentru soluția exactă . Pentru determinarea coeficienților
ci se impune pentru fiecare funcție Wj numite funcții pondere condiția de anulare a reziduului în
medie pe întregul domeniul de calcul al problemei prin relaţia:
∫Ω
W j R (~Φ ) dΩ=0
(4.6)
Funcţiile pondere Wj pot fi identice cu funcţiile de formă Ni şi atunci discutăm despre
Metoda Galerkin (cea mai utilizată), pot fi funcţii Dirac şi în acest caz asistăm la Metoda
Colocaţiei sau alte variante.
Condiţiile pe frontiere se definesc tot în decursul acestei etape şi pot fi de mai multe tipuri.
Cele mai cunoscute sunt condiţiile de tip Dirichlet, ce sunt aplicate direct asupra variabilelor de

stare sau condiţiile de tip Neuman sau naturale ce rezultă în mod implicit din însăşi formularea
MEF.
Ecuația diferențiala inițială se transformă prin operațiile de mai sus într-un sistem de n ecuații
cu n necunoscute, numărul n fiind determinat de numărul elementelor finite, de numărul
coeficienților necunoscuți ci etc. Sistemul de ecuații obținut are forma matriceală:
[ A ] {X }= {B } (4.7)
Rezolvarea sistemului de ecuații (4.7) utilizând metode numerice specifice precum Metoda
Gradientului Conjugat, Metoda Gradientului Biconjugat, Metoda Generalizată a Reziduului
Minimal etc. permite determinarea valorilor variabilei de stare în nodurile rețelei de discretizare
şi ulterior prin interpolare în orice punct al domeniului de calcul. Pe baza soluției de câmp se pot
procesa alte mărimi locale sau globale derivate ale variabilei de stare.
4.2. Etape principale în analiza maşinilor electrice utilizând MEF. Principalele etape în
rezolvarea problemelor de câmp utilizând MEF sunt următoarele (anumite etape pot fi tratate în
altă ordine):
- Definirea regimului de câmp caracteristic studiului efectuat (regim magnetostatic, magnetic
staționar, magneto-dinamic, magnetic tranzitoriu etc.);
- Descrierea geometriei domeniului de calcul 2D/3D;
- Definirea rețelei de discretizare ținând cont de aspectele fizice ale problemei;
- Definirea proprietăţilor de material care intervin în problema de analiză numerică;
- Definirea regiunilor domeniului de calcul şi a surselor de câmp (densităţi de curent, etc.);
- Definirea circuitului electric asociat dacă este cazul;
- Asocierea proprietăţilor de material şi a componentelor de circuit (unde e cazul) regiunilor
domeniului de calcul;
- Definirea condiţiilor la limită (iniţiale şi pe frontiere);
- Asamblarea matricelor şi rezolvarea sistemului de ecuații algebrice;
- Analiza rezultatelor numerice (calculul mărimilor locale şi integrale necesare).
5. Exploatarea simetriilor. Probleme plan paralele şi probleme axi-simetrice
Problemele reale de calcul de câmp sunt în mod natural probleme tridimensionale (3D). În
multe cazuri însă fenomenul analizat poate fi considerat unul 2D, prin neglijarea variaţiei

mărimii de stare după una dintre cele trei coordonate geometrice (variaţia mărimii de stare în
lungul acelei coordonate fiind nesemnificativă). Astfel un număr important de aplicaţii reale 3D
permit în fond o abordare 2D fără o pierdere semnificativă în ceea ce priveşte relevanţa şi
consistenţa rezultatelor obţinute.
Reducerea unei probleme 3D la una 2D este justificată în primul rând de simplificarea
domeniului de calcul, de reducerea efortului privind construcţia geometriei, de reducerea
numărului de necunoscute rezultate prin aplicarea unor metode de calcul numeric (ex. MEF), de
economii importante privind timpul de calcul etc. Astfel în funcţie de structura câmpului
electromagnetic în cazul aplicaţiei iniţiale 3D, distingem două tipuri de aproximări 2D:
aproximare 2D de tip plan - paralelă, respectiv aproximare 2D de tip axi-simetrică.
Aproximarea unei probleme de calcul de câmp 3D printr-una de tip 2D plan-paralelă este
posibilă atunci când liniile de câmp (ex. câmp magnetic, câmp electric, etc.) produse de sursele
de câmp (ex. magneţi permanenţi, curentul electric, etc.) din domeniul de calcul sunt situate în
plane paralele ca în Fig. 1 şi au practic aceeaşi structură oricare ar fi planul considerat.
Fig. 1. Reducerea unei probleme de calcul de câmp magnetic staționar 3D la o problemă 2D de tip plan-paralelă.
În cazul problemelor de câmp magnetic staţionar acest fapt este echivalent cu a spune că toţi
curenţii ce parcurg regiunile domeniului de calcul au aceeaşi direcţie (nu neapărat şi acelaşi
sens), cum este cazul maşinilor electrice (curenţii în crestături au direcţie axială). În acest caz
domeniul de calcul 3D caracterizat de coordonatele (x, z, y) se poate reduce la unul 2D
caracterizat de coordonatele (x, z), Fig. 1.
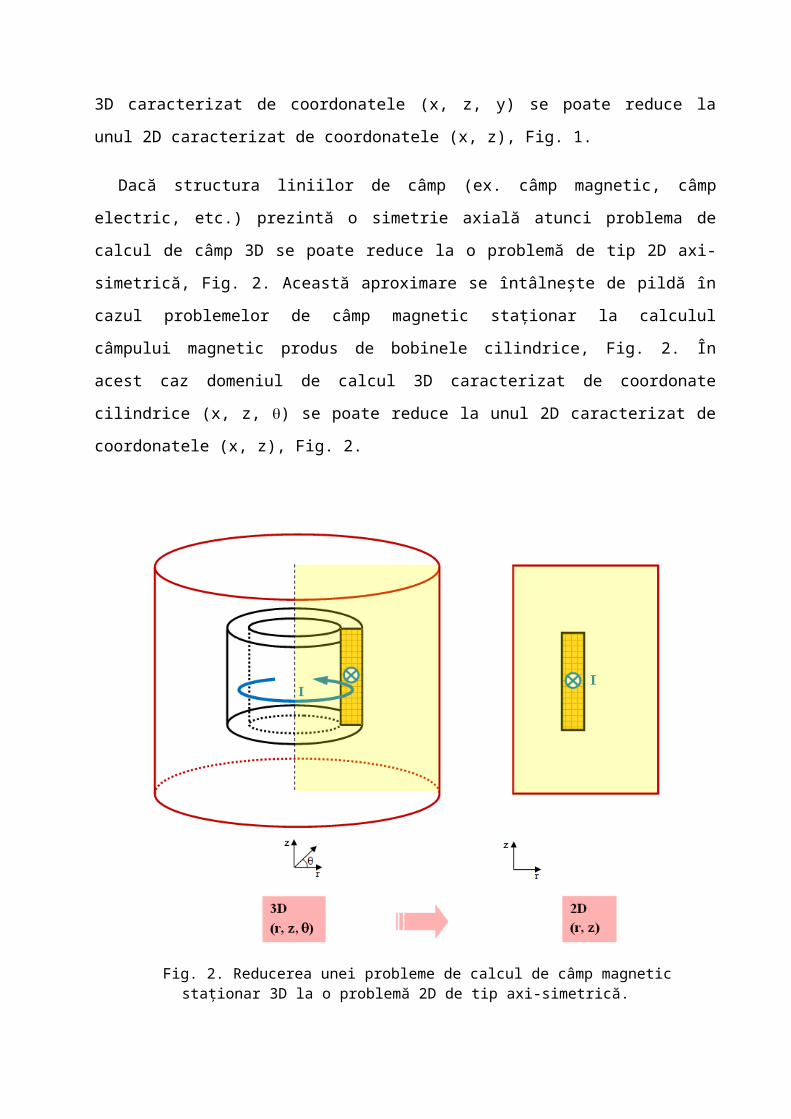
Dacă structura liniilor de câmp (ex. câmp magnetic, câmp electric, etc.) prezintă o simetrie
axială atunci problema de calcul de câmp 3D se poate reduce la o problemă de tip 2D axi-
simetrică, Fig. 2. Această aproximare se întâlneşte de pildă în cazul problemelor de câmp
magnetic staţionar la calculul câmpului magnetic produs de bobinele cilindrice, Fig. 2. În acest
caz domeniul de calcul 3D caracterizat de coordonate cilindrice (x, z, ) se poate reduce la unul
2D caracterizat de coordonatele (x, z), Fig. 2.
Fig. 2. Reducerea unei probleme de calcul de câmp magnetic staţionar 3D la o problemă 2D de tip axi-simetrică.

6. Prezentare generală a pachetului de programe FEMM
Rezolvarea problemelor de câmp electromagnetic poate fi efectuată prin mai multe metode
analitice sau numerice. Metodele analitice sunt utilizabile doar în cazul geometriilor simple.
Metodele numerice care pot fi utilizate la rezolvarea problemelor de câmp electromagnetic sunt
Metode Elementelor Finite (MEF), Metoda Diferenţelor Finite (MDF), Metoda Elementelor de
Frontieră (MEFr) etc. Din categoria metodelor numerice cu siguranţă cea mai flexibilă, generală
şi utilizată metodă este MEF. Această metodă este implementată într-o paletă foarte largă de
pachete de programe de calcul de câmp precum: FEMM, Flux, Comsol, Ansys etc.
Pachetul de programe de calcul de câmp FEMM (Finite Element Method Magnetics) este
dedicat rezolvării prin MEF a problemelor de câmp 2D de regim magnetostatic, magnetic
staţionar, electrostatic, electric staţionar, cvasistaţionar de tip magnetic, termic staţionar, în
aproximare plană sau axisimetrică. FEMM se poate procura gratuit de la adresa de internet:
http://www.femm.info/. Un manual de utilizare FEMM în lb. română se găsește la adresa de
internet http://www.femm.info/Archives/contrib/manual_ro.pdf
FEMM este alcătuit dintr-un sistem grafic de preprocesare, un generator de reţea de
discretizare de ordinul I, diverse programe de rezolvare a sistemelor de ecuaţii rezultate prin
aplicarea MEF, respectiv dintr-un sistem grafic de post-procesare a soluţiilor numerice de câmp
obţinute. Problemele studiate pot conţine un număr de necunoscute limitat doar de memoria
disponibilă a calculatorului utilizat.
Rezolvarea problemelor de calcul de câmp poate face apel şi la limbajul de programare Lua
4.0 (http://www.lua.org) inclus în pachetul FEMM acesta permiţând realizarea de studii
parametrice, studii de optimizare numerică etc. Limbajul de programare Lua include un set
special de instrucţiuni ce pot fi apelate în cadrul unor fişiere de tip script care trebuie lansate în
execuţie.
7. Calculul câmpului magnetic produs de o bobină cilindrică alimentată în c.c.
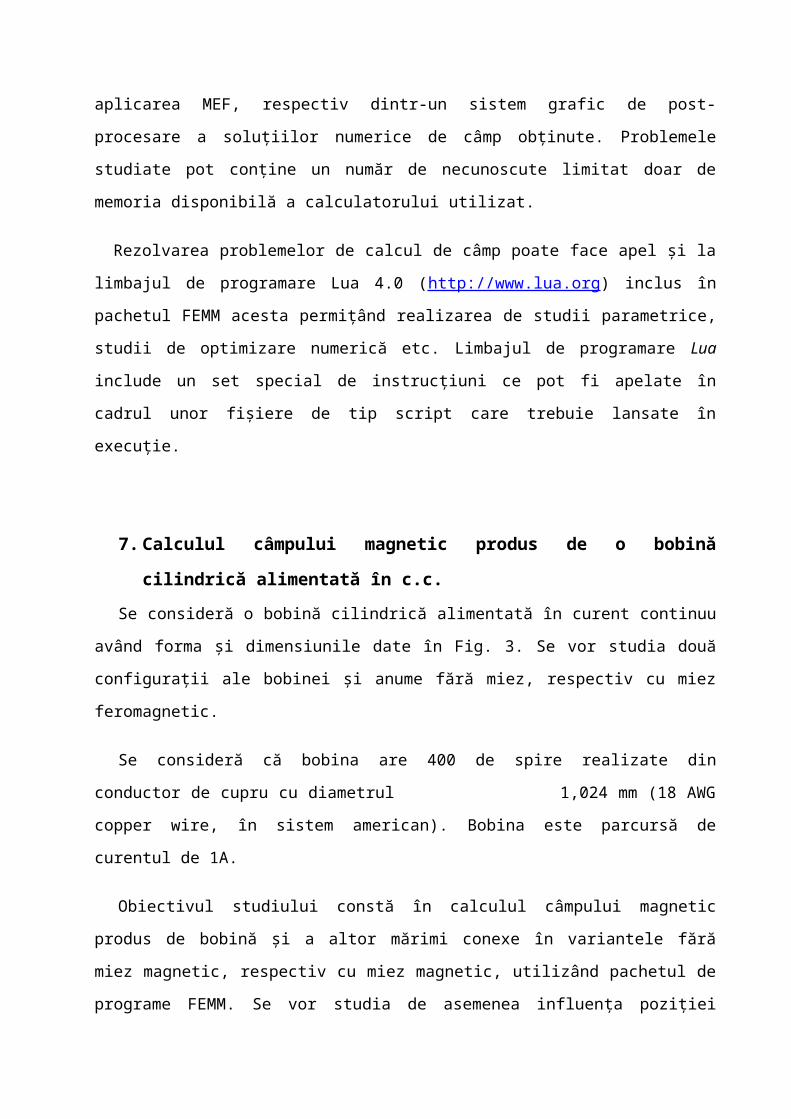
Se consideră o bobină cilindrică alimentată în curent continuu având forma şi dimensiunile
date în Fig. 3. Se vor studia două configuraţii ale bobinei şi anume fără miez, respectiv cu miez
feromagnetic.

Se consideră că bobina are 400 de spire realizate din conductor de cupru cu diametrul
1,024 mm (18 AWG copper wire, în sistem american). Bobina este parcursă de curentul de 1A.
Obiectivul studiului constă în calculul câmpului magnetic produs de bobină și a altor mărimi
conexe în variantele fără miez magnetic, respectiv cu miez magnetic, utilizând pachetul de
programe FEMM. Se vor studia de asemenea influența poziției frontierei domeniului de calcul
asupra rezultatelor numerice, forța de atracție dintre bobină și o piesă feromagnetică etc.
a) b)
Fig. 3. Bobină fără a) respectiv cu miez de fier b).
7.1. Bobină cilindrică fără miez feromagnetic alimentată în c.c.
Se lansează în execuţie aplicaţia FEMM4.2 (Fig. 4 a) din meniul Start al sistemului de
operare Windows în urma căreia se va afişa fereastra principală a pachetului de programe FEMM
versiunea 4.2 (Fig. 4 b).
a) b)
Fig. 4. Lansarea în execuţie a aplicaţiei FEMM 4.2 (a) şi fereastra principală a pachetului de programe FEMM versiunea 4.2 (b).
Se va construi un nou proiect prin selectarea opţiunii New din meniul File sau prin clic pe
icoana din bara de unelte. În urma operaţiei efectuate se va afişa o fereastra de tip dialog în
care trebuie ales tipul aplicaţiei Magnetostatics Problem (problemă de câmp magnetic
staţionar) şi validat prin clic pe butonul Ok, Fig. 5.
Alte opţiuni posibile sunt: Electrostatics Problem (problemă de câmp electrostatic), Heat
Flow Problem (problemă de transfer de căldură), Current Flow Problem (problemă de
electrocinetică).
Fig. 5. Alegerea tipului problemei de câmp.
După această selecţie fereastra principală se va actualiza prin adăugarea unor meniuri, icoane
etc., Fig. 6. Aplicaţia curentă se salvează sub numele Bobina1 folosind comanda File/Save As.
Fişierul va căpăta extensia *.fem.
Fig. 6. Fereastra principală actualizată după alegerea tipului problemei de câmp.
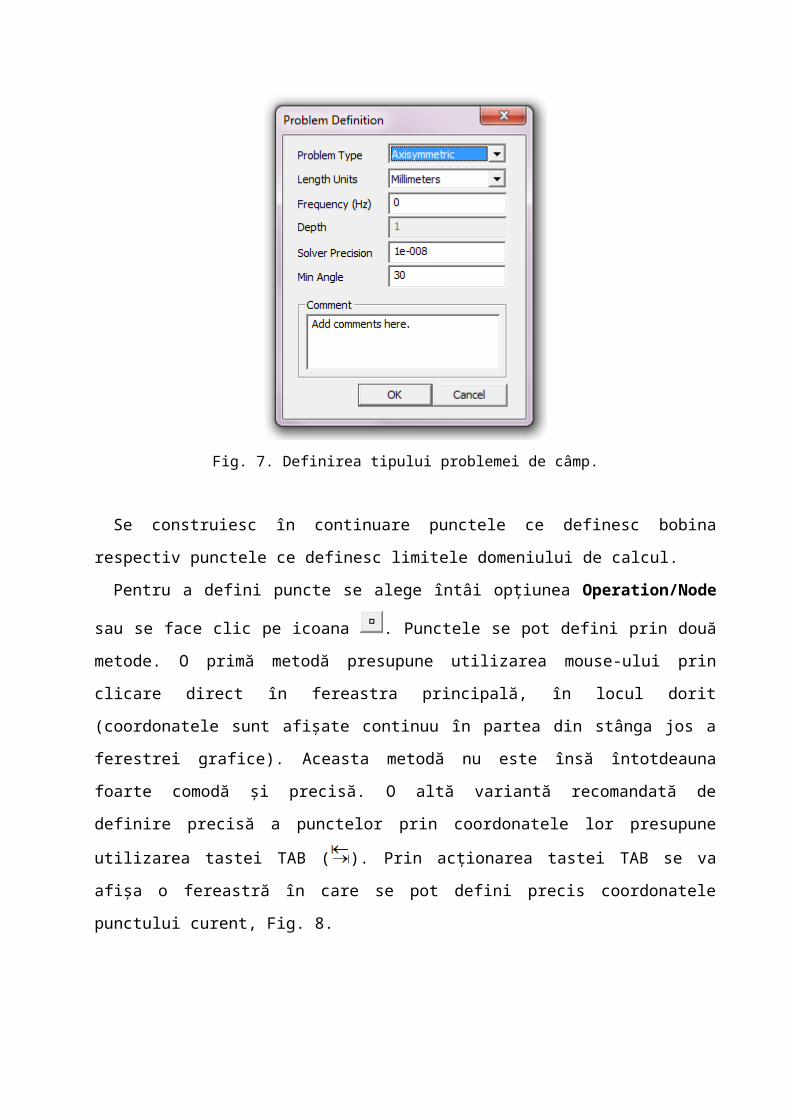
În continuare trebuie ales tipul aplicaţiei. Din meniul Problem se alege opţiunea
Axisymmetric şi apoi se validează prin clic pe butonul Ok, Fig. 7. Din acelaşi meniu se pot
alege de asemenea: unitatea de măsură (implicit milimetri; alte opţiuni inch, centimetri, metri,
micrometri etc.), frecvenţa (implicit 0 Hz), precizia de calcul (implicit 10 -8) etc. Se alege unitatea
de măsură milimetri (Millimeters).
Fig. 7. Definirea tipului problemei de câmp.
Se construiesc în continuare punctele ce definesc bobina respectiv punctele ce definesc
limitele domeniului de calcul.
Pentru a defini puncte se alege întâi opţiunea Operation/Node sau se face clic pe icoana .
Punctele se pot defini prin două metode. O primă metodă presupune utilizarea mouse-ului prin
clicare direct în fereastra principală, în locul dorit (coordonatele sunt afişate continuu în partea
din stânga jos a ferestrei grafice). Aceasta metodă nu este însă întotdeauna foarte comodă şi
precisă. O altă variantă recomandată de definire precisă a punctelor prin coordonatele lor
presupune utilizarea tastei TAB ( ). Prin acţionarea tastei TAB se va afişa o fereastră în care se
pot defini precis coordonatele punctului curent, Fig. 8.
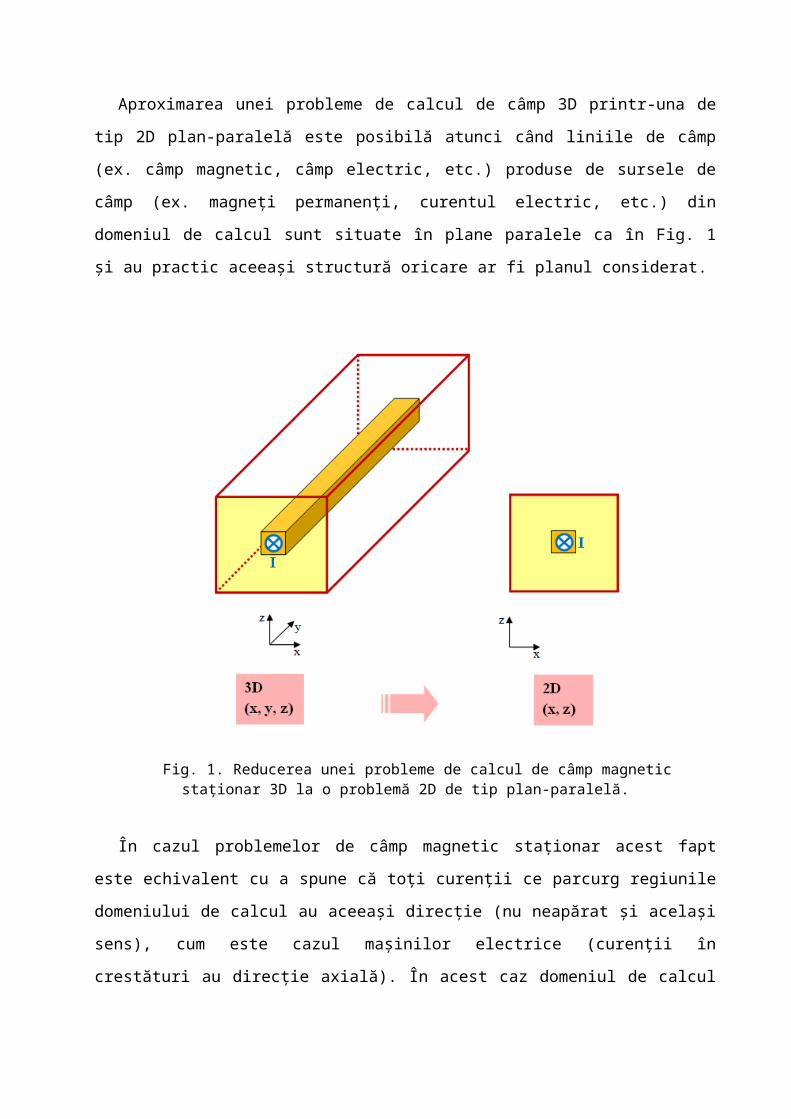
Fig. 8. Definirea coordonatelor punctului curent.
Se vor introduce coordonatele punctelor conform Tabel 1 de mai jos. Fereastra grafică va
arăta ca în Fig. 9.
Tabel 1. Coordonatele punctelor ce definesc regiunile domeniului de calcul
r [mm] 12.5 12.5 25 25 0 0 100
z [mm] -20 20 -20 20 -100 100 0
Fig. 9. Punctele ce definesc regiunile domeniului de calcul.
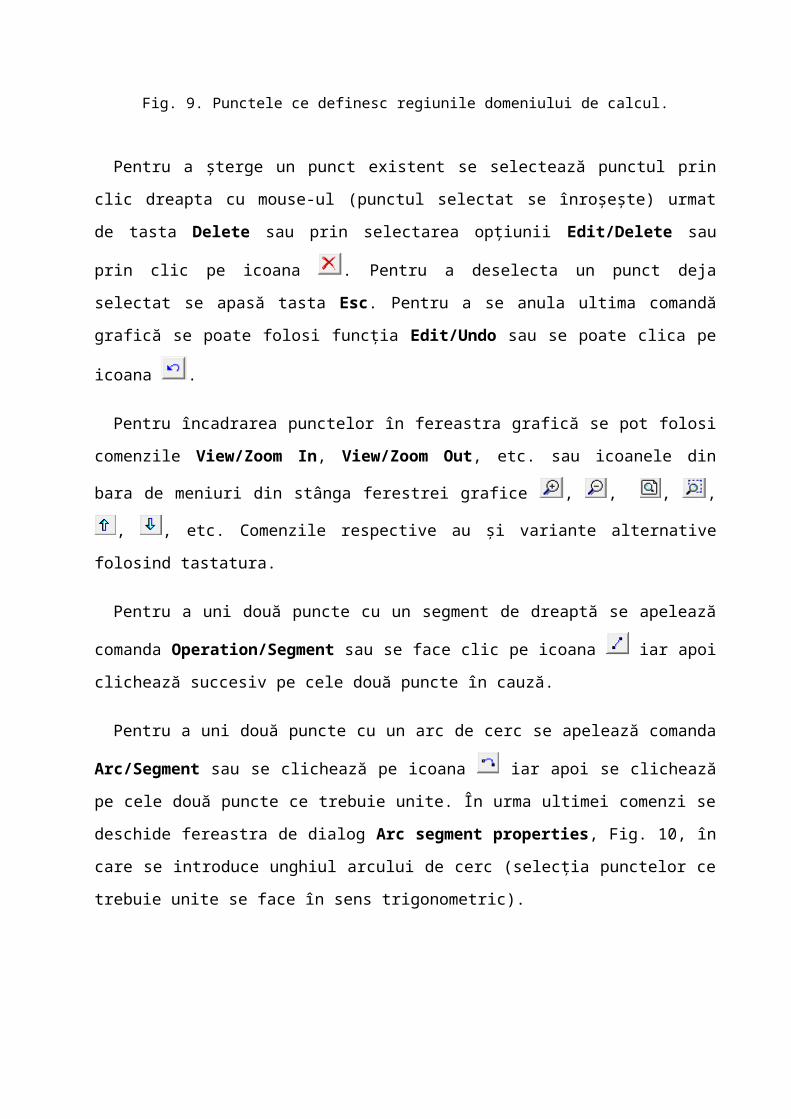
Pentru a şterge un punct existent se selectează punctul prin clic dreapta cu mouse-ul (punctul
selectat se înroşeşte) urmat de tasta Delete sau prin selectarea opţiunii Edit/Delete sau prin clic
pe icoana . Pentru a deselecta un punct deja selectat se apasă tasta Esc. Pentru a se anula
ultima comandă grafică se poate folosi funcţia Edit/Undo sau se poate clica pe icoana .
Pentru încadrarea punctelor în fereastra grafică se pot folosi comenzile View/Zoom In,
View/Zoom Out, etc. sau icoanele din bara de meniuri din stânga ferestrei grafice , , ,
, , , etc. Comenzile respective au și variante alternative folosind tastatura.
Pentru a uni două puncte cu un segment de dreaptă se apelează comanda Operation/Segment
sau se face clic pe icoana iar apoi clichează succesiv pe cele două puncte în cauză.
Pentru a uni două puncte cu un arc de cerc se apelează comanda Arc/Segment sau se
clichează pe icoana iar apoi se clichează pe cele două puncte ce trebuie unite. În urma
ultimei comenzi se deschide fereastra de dialog Arc segment properties, Fig. 10, în care se
introduce unghiul arcului de cerc (selecţia punctelor ce trebuie unite se face în sens
trigonometric).
Fig. 10. Definirea unui arc de cerc ce uneşte două puncte.
După unirea punctelor cu segmente de dreaptă, respectiv arce de cerc fereastra grafică va arăta
ca în Fig. 11.

Fig. 11. Punctele domeniului de calcul unite cu segmente de dreaptă şi arce de cerc.
Următoarea operaţie constă în etichetarea regiunilor domeniului de calcul. Prin etichetare se
asociază regiunilor domeniului de calcul proprietăţi de material, proprietăţi fizice etc. Pentru a fi
posibilă operaţia de etichetare se foloseşte comanda Operation/Block sau se clichează pe icoana
. Ulterior pentru adăugarea de etichete se clichează în interiorul regiunii bobină şi apoi în
exteriorul ei (domeniul de calcul include regiunea Aer şi regiunea Bobina), Fig. 12.
Fig. 12. Punctele şi liniile domeniului de calcul, respectiv etichetele denumite generic <None>.
În continuare se definesc materialele asociate regiunilor domeniului de calcul prin apelul
comenzii Properties/Materials Library. În fereastra de dialog Materials Library care se
deschide, Fig. 13, se aleg din partea din stânga a ferestrei materialele dorite şi se trag cu mouse-
ul în partea din dreapta a ferestrei (în cazul de faţă Air şi 18 AWG) după care se validează
alegerea prin clic pe butonul Ok.
Fig. 13. Materialele alese pentru regiunile Aer şi Bobina.
Pentru a adăuga o proprietate de tip circuit regiunii Bobina se alege opţiunea
Properties/Circuits. În fereastra de dialog se deschide Property Definition din Fig. 14, se
alege opţiunea Add Property, iar în noua fereastră de dialog deschisă, Fig. 15, se alege opţiunea
Series şi se fixează valoarea curentului de 1A. Opţiunile sunt validate prin clic pe butonul Ok al
ferestrei din Fig. 15 şi apoi printr-un nou clic pe butonul Ok al ferestrei apelante, Fig. 14.
Fig. 14. Adăugarea unei proprietăţi de tip circuit regiunii Bobina.
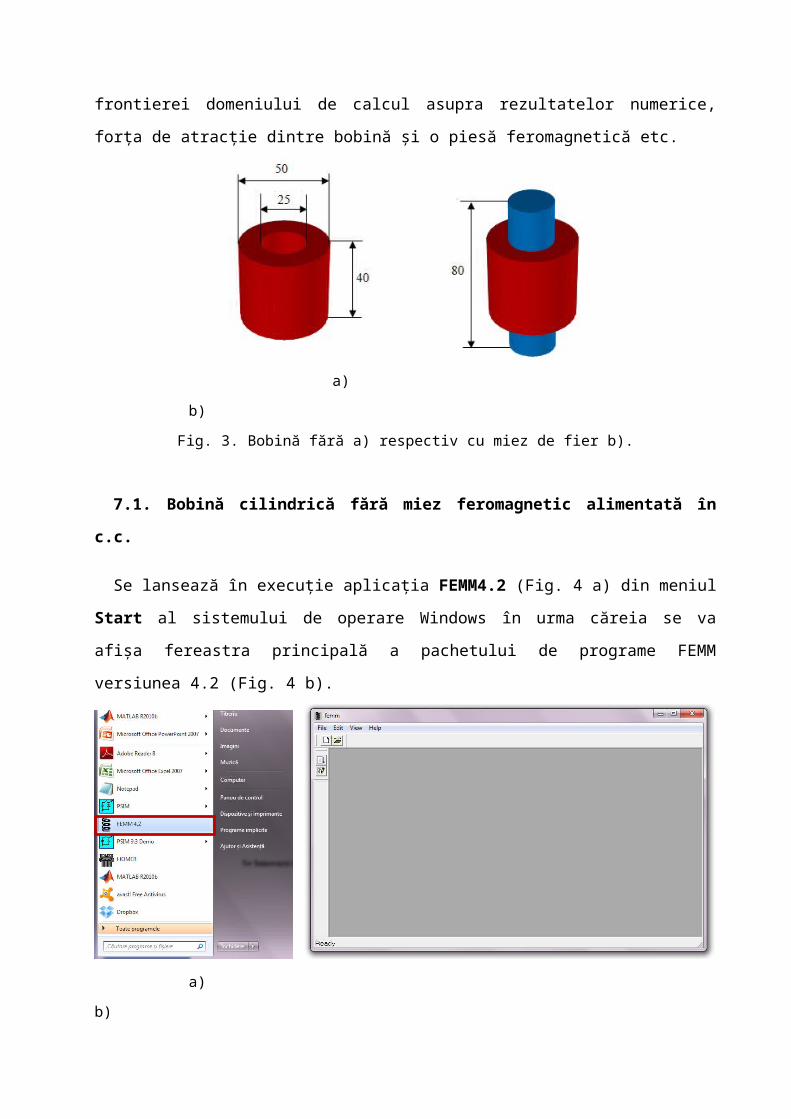
Fig. 15. Adăugarea unei proprietăţi de tip circuit regiunii Bobina.
Pentru a redenumi eticheta corespunzătoare regiunii Bobina se face clic dreapta pe aceasta şi
apoi se apasă tasta Space. În căsuţa de dialog ce se deschide se alege opţiunea 18 AWG în
dreptul câmpului Block Type, opţiunea Bobina în dreptul câmpului In Circuit şi 400 în dreptul
câmpului Number of turns, ca în Fig. 16. În plus se deselectează optiunea Let Triangle choose
Mesh Size şi în dreptul câmpului Mesh size se fixează valoarea 2 (ceea ce înseamnă că
dimensiunea elementelor finite triunghiulare în regiunea Bobina este de circa 2 mm). Opţiunile
alese se validează prin clic pe butonul Ok.
Fig. 16. Proprietăţi pentru regiunea Bobina.
Un număr pozitiv de spire (ca în cazul de față) ales înseamnă un curent care intră în planul
domeniului de calcul. Dacă sensul curentului este opus, adică iese din planul domeniului de
calcul, numărul de spire trebuie ales negativ.
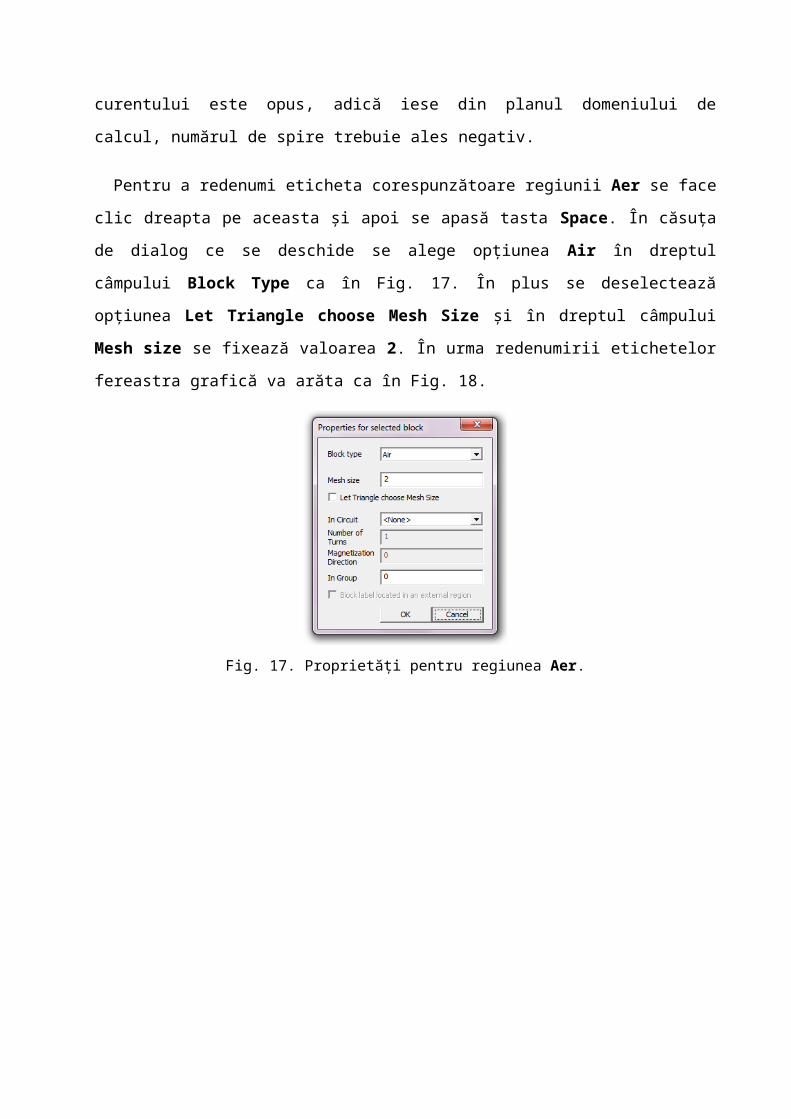
Pentru a redenumi eticheta corespunzătoare regiunii Aer se face clic dreapta pe aceasta şi apoi
se apasă tasta Space. În căsuţa de dialog ce se deschide se alege opţiunea Air în dreptul
câmpului Block Type ca în Fig. 17. În plus se deselectează opțiunea Let Triangle choose Mesh

Size şi în dreptul câmpului Mesh size se fixează valoarea 2. În urma redenumirii etichetelor
fereastra grafică va arăta ca în Fig. 18.
Fig. 17. Proprietăţi pentru regiunea Aer.
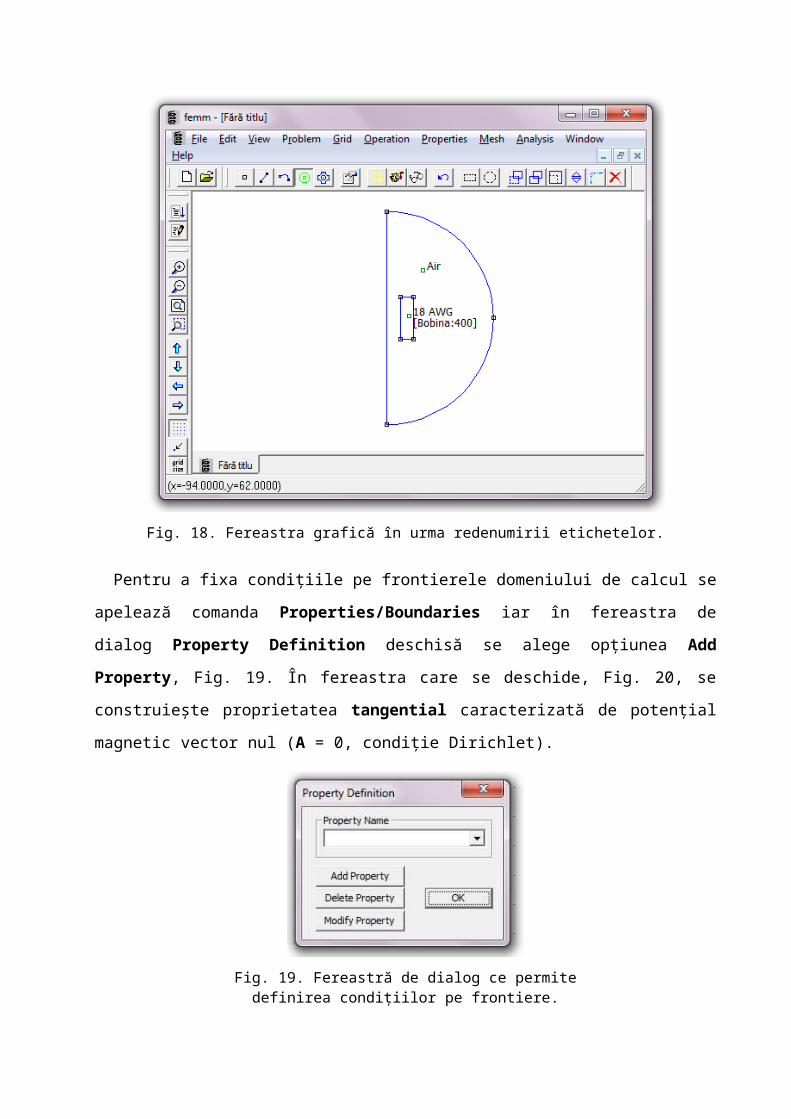
Fig. 18. Fereastra grafică în urma redenumirii etichetelor.
Pentru a fixa condiţiile pe frontierele domeniului de calcul se apelează comanda
Properties/Boundaries iar în fereastra de dialog Property Definition deschisă se alege opţiunea
Add Property, Fig. 19. În fereastra care se deschide, Fig. 20, se construieşte proprietatea
tangential caracterizată de potenţial magnetic vector nul (A = 0, condiţie Dirichlet).

Fig. 19. Fereastră de dialog ce permite definirea condiţiilor pe frontiere.
Fig. 20. Definirea condiţiei pe frontiere de tip Dirichlet (A = 0).
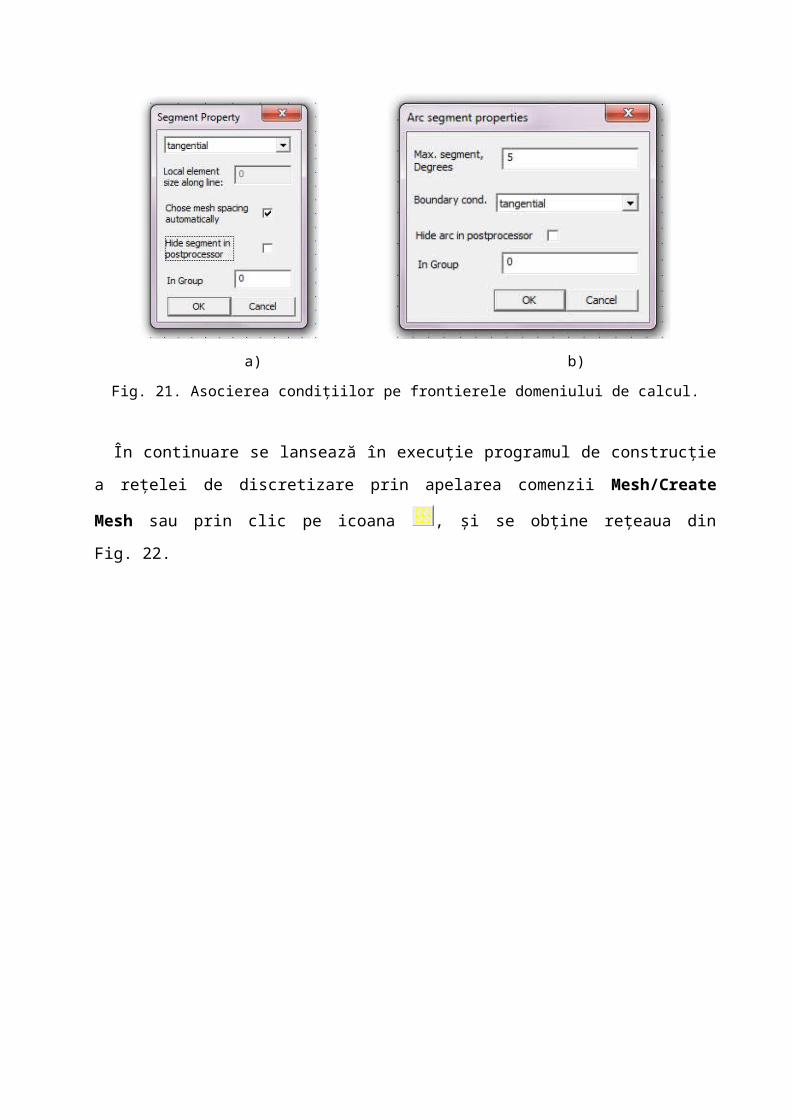
Pentru asocierea condiţiilor pe frontiere se alege opţiunea Operation/Segment (sau clic pe
icoana ) iar apoi se selectează axa de simetrie a problemei 2D cu mouse-ul prin clic dreapta şi
se apasă tasta Space. În fereastra deschisă Segment Property, Fig. 21 a), se alege opţiunea
tangential şi se apasă butonul Ok. Această operație de fixare a unei condiții de tip Dirichlet pe
axa de simetrie a domeniului de calcul (pentru r = 0) este facultativă deoarece în FEMM toate
problemele axi-simetrice au impusă implicit această condiție.
În mod similar se alege opţiunea Operation/Arc Segment (sau clic pe icoana ) şi apoi se
selectează frontiera de tip infinit a problemei 2D cu mouse-ul prin clic dreapta şi se apasă tasta
Space. În fereastra deschisă, Arc segment properties, Fig. 21 b), se alege opţiunea tangential şi
se apasă butonul Ok.
a) b)
Fig. 21. Asocierea condiţiilor pe frontierele domeniului de calcul.
În continuare se lansează în execuţie programul de construcţie a reţelei de discretizare prin
apelarea comenzii Mesh/Create Mesh sau prin clic pe icoana , şi se obţine reţeaua din
Fig. 22.
Fig. 22. Reţeaua de discretizare a domeniului de calcul.

Ulterior se lansează în execuţie programul de rezolvare a sistemului de ecuaţii rezultat prin
aplicarea MEF în vederea obţinerii soluţiei de câmp prin comanda Analysis/Analyze sau prin
clic pe icoana .
Ultima etapă a rezolvării problemei de calcul de câmp constă în analiza rezultatelor cu
ajutorul comenzii Analysis/View Results sau prin clic pe icoana care generează o nouă
fereastră destinată exploatării rezultatelor numerice, Fig. 23.
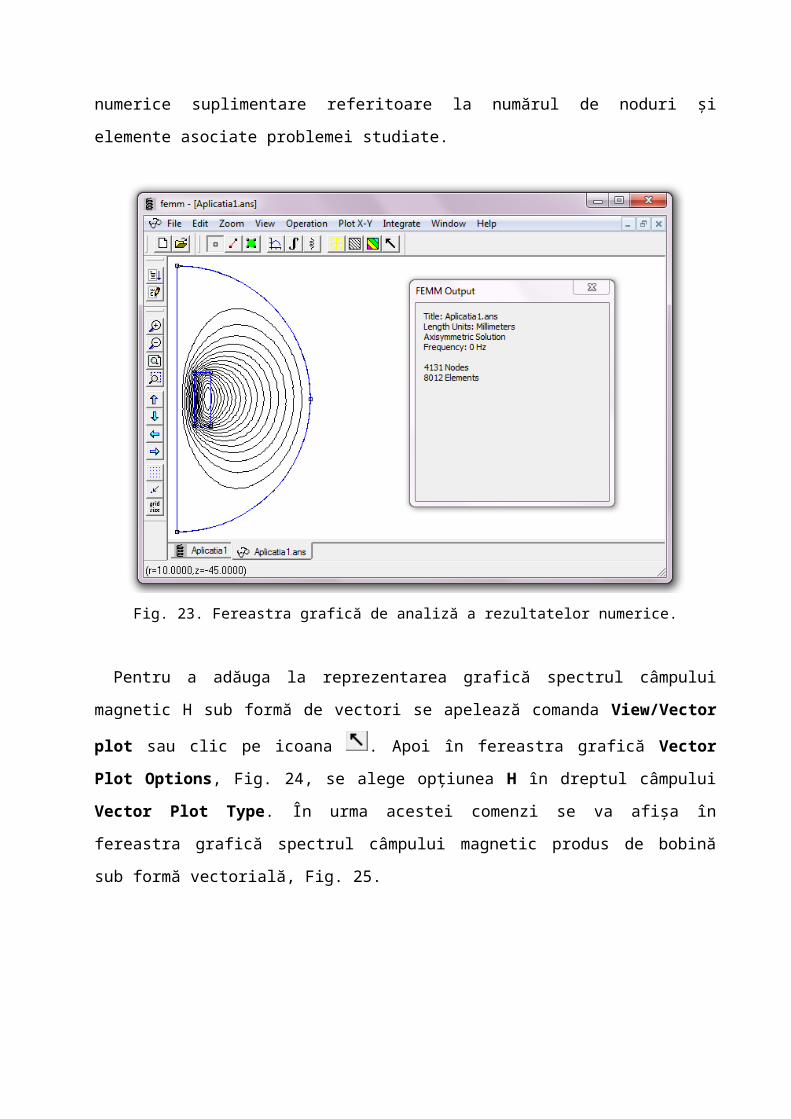
În urma lansării comenzii specificate, în fereastra grafică de post-procesare a soluţiei de câmp
se afișează spectrul liniilor câmpului magnetic produs de bobină. De asemenea într-o altă
fereastra alăturată FEMM Output sunt prezentate informaţii numerice suplimentare referitoare
la numărul de noduri şi elemente asociate problemei studiate.
Fig. 23. Fereastra grafică de analiză a rezultatelor numerice.
Pentru a adăuga la reprezentarea grafică spectrul câmpului magnetic H sub formă de vectori
se apelează comanda View/Vector plot sau clic pe icoana . Apoi în fereastra grafică Vector
Plot Options, Fig. 24, se alege opţiunea H în dreptul câmpului Vector Plot Type. În urma
acestei comenzi se va afişa în fereastra grafică spectrul câmpului magnetic produs de bobină sub
formă vectorială, Fig. 25.
Fig. 24. Opţiuni de plotare a rezultatelor numerice sub formă de vectori.
Fig. 25. Spectrul câmpului magnetic reprezentat sub formă vectorială.
Pentru a evalua mărimile locale asociate câmpului magnetic pe un suport de tip punct, contur
sau suprafaţă se apelează una din comenzile Operation/Point properties, Operation/Contours
sau Operation/Areas sau se clichează pe una dintre icoanele . Implicit este selectată

opţiunea Operation/Point properties. Astfel dacă facem clic într-un punct din domeniul de
calcul se vor afişa mărimile locale ca în Fig. 26.
Fig. 26. Exemplu de mărimi locale afişate în fereastra FEMM Output.
Pentru a calcula mărimile de tip circuit asociate regiunii Bobina se face clic pe icoana şi
acestea vor fi afişate în fereastra Circuit Properties, Fig. 27.
Fig. 27. Mărimi de tip circuit asociate regiunii Bobina.
Inductivitatea bobinei exprimată în Henry este calculată ca raportul dintre flux şi curent
(Flux/Current ≈ 0.002887 H în cazul studiat). De asemenea este calculată rezistenţa bobinei R
exprimată în (Voltage/Current ≈ 0.986627 Ohms în cazul studiat) şi puterea P disipată în
bobină egală ca valoare numerică cu rezistenţa bobinei (Power = RI2 iar I = 1 A, Power ≈
0.986627 W). Alte mărimi calculate specifice bobinei sunt fluxul magnetic (Flux Linkage ≈
0.002887 Wb), căderea de tensiune pe bobină (Voltage Drop ≈ 0.98663 V).

Pentru a plota variaţia unei mărimi în lungul unui contur definit de utilizator trebuie întâi
definit conturul suport. Conturul se definește prin unirea a două sau mai multe puncte.
Adăugarea de noi puncte la un contur se poate face prin mai multe metode. Prin clic stânga cu
mouse-ul se selectează punctul cel mai apropiat şi se adaugă conturului suport. Prin clic dreapta
cu mouse-ul se selectează punctul curent şi se adaugă conturului suport, iar cu ajutorul tastei Tab
se deschide o cutie de dialog în care se pot specifica coordonatele punctului curent care se
adaugă la conturul suport.
Pentru a plota variaţia inducţiei magnetice aproximativ în lungul axei de simetrie a bobinei se
face apel la tasta Tab şi se introduc coordonatele ca în Fig. 28. Pentru ca punctele ce definesc
conturul suport să aparţină interiorului domeniului de calcul se alege coordonata r puţin mai
mare ca zero, iar coordonata z inferioară limitelor domeniului de calcul (-100 mm/ 100 mm).
Fig. 28. Coordonatele punctelor ce definesc conturul suport.
După definirea conturului se face clic pe icoana , iar în fereastra care se deschide se alege
mărimea de reprezentat grafic, Fig. 29. În cutia de dialog se poate defini de asemenea numărul de
puncte de discretizare, se pot exporta datele într-un fişier text etc.
Fig. 29. Definirea mărimii de reprezentat grafic în lungul unui contur.

Variaţia inducţiei magnetice în lungul conturului considerat arată ca în Fig. 30. Valoarea
maximă a inducţiei magnetice este de circa 0.01 T şi se atinge în centrul bobinei.
Fig. 30. Variaţia inducţiei magnetice în lungul conturului suport.
Pentru înlăturarea reprezentării vectoriale a inducţiei magnetice în domeniul de calcul se
apelează comanda View/Vector Plot iar în căsuţa de dialog afişată Vector Plot Options se alege
opţiunea <None> în dreptul câmpului Vector Plot Type, Fig. 31.
Fig. 31. Eliminarea reprezentării vectoriale a intensităţii câmpului magnetic H.
Pentru reprezentarea hărţii inducţiei magnetice în domeniul de calcul se face apel la comanda
View/Density Plot sau se face clic pe icoana . În fereastra Dialog care este afişată se bifează

opţiunea Show Density Plot, iar în câmpul Plotted Value se alege Flux Density (T), ca în
Fig. 32.
Fig. 32. Setări pentru reprezentarea hărţii inducţiei magnetice în domeniul de calcul.
Harta inducţiei magnetice împreună cu legenda asociată este prezentată în Fig. 33. Se observă
că valorile maxime ale inducţiei magnetice se obţin în interiorul bobinei.
Fig. 33. Reprezentarea grafică a hărţii inducţiei magnetice în domeniul de calcul.
Pentru a calcula fluxul magnetic pe o suprafaţă (definită în 2D de un contur) se defineşte întâi
conturul suport ce defineşte suprafaţa (prin puncte care se unesc cu segmente sau arce de cerc) şi
apoi se apelează comanda Integrate sau clic pe icoana . În fereastra Line Integrals care se
deschide, Fig. 34, se alege opţiunea B.n. Astfel se poate calcula fluxul magnetic pe suprafaţa
definită de segmentul mărginit de punctele B1(r1, z1) şi B2(r2, z2) unde r1 = 0, z1 = 0, r2 = 25,
z2 = 0. Rezultatul numeric obţinut este de circa 9.64 10-6 Wb, fiind indicat în Fig. 35.
Fig. 34. Alegerea mărimii de integrat.
Fig. 35. Fluxul magnetic calculat.
7.2. Influenţa poziţiei frontierei asupra rezultatelor numerice
În cazul problemelor cu frontieră deschisă rezultatele numerice obţinute prin MEF sunt
dependente de distanţa dintre frontiera domeniului de calcul şi sursele de câmp (în cazul nostru
regiunea bobina). Această distanţă trebuie să fie suficient de mare aşa încât indiferent de tipul
condiţiilor impuse pe frontieră (Dirichlet sau Neumann) rezultatele numerice în zona de interes
să nu se modifice semnificativ. Un compromis rezonabil se obţine pentru distanţe de circa 5 ori
mai mari decât diametru regiunii de interes.
În acest sens se propune un studiu privind influenţa poziţiei frontierei exterioare asupra
rezultatelor numerice.
În cazul maşinilor electrice uzuale în care miezul magnetic exterior al maşinii reprezintă un
concentrator de linii de câmp magnetic, frontiera domeniului de calcul se alege (cu mici excepţii)
chiar conturul exterior al acesteia, iar pe frontieră se impune o condiţie de tip Dirichlet (A = 0
care este echivalentă cu a impune un câmp magnetic tangenţial).
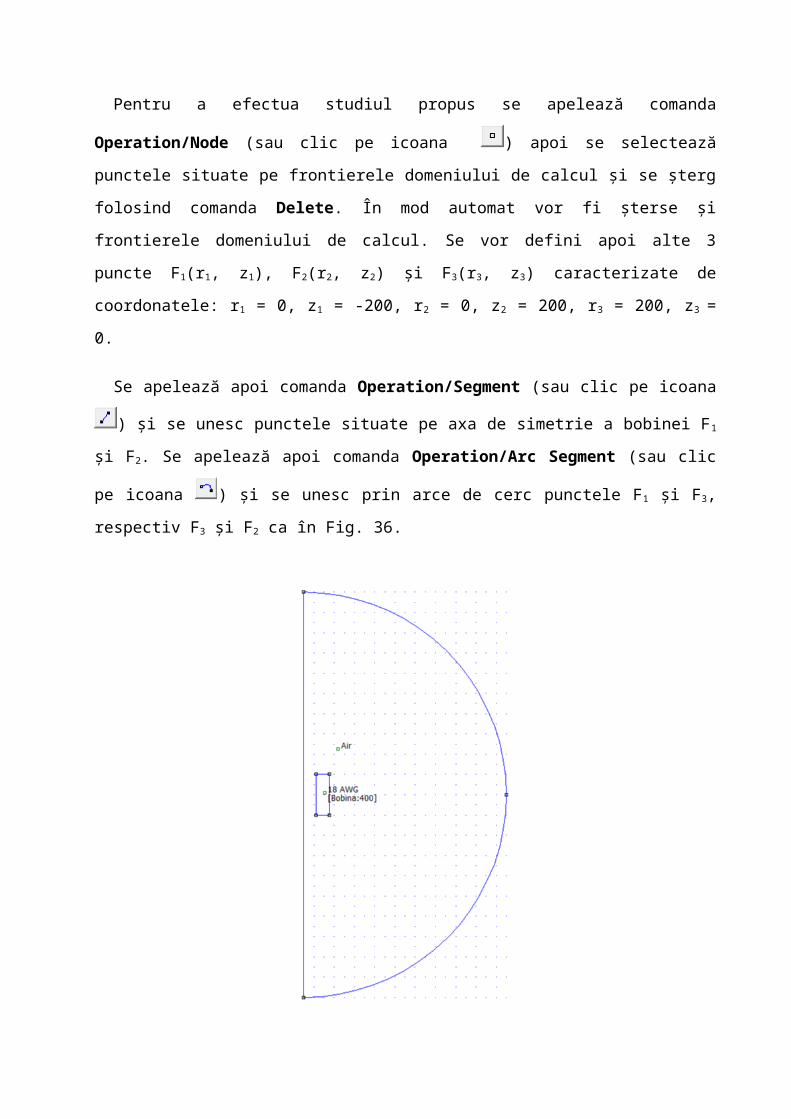
Pentru a efectua studiul propus se apelează comanda Operation/Node (sau clic pe icoana
) apoi se selectează punctele situate pe frontierele domeniului de calcul şi se şterg folosind
comanda Delete. În mod automat vor fi şterse şi frontierele domeniului de calcul. Se vor defini
apoi alte 3 puncte F1(r1, z1), F2(r2, z2) şi F3(r3, z3) caracterizate de coordonatele: r1 = 0, z1 = -200,
r2 = 0, z2 = 200, r3 = 200, z3 = 0.
Se apelează apoi comanda Operation/Segment (sau clic pe icoana ) şi se unesc punctele
situate pe axa de simetrie a bobinei F1 şi F2. Se apelează apoi comanda Operation/Arc Segment
(sau clic pe icoana ) şi se unesc prin arce de cerc punctele F1 şi F3, respectiv F3 şi F2 ca în Fig.
36.
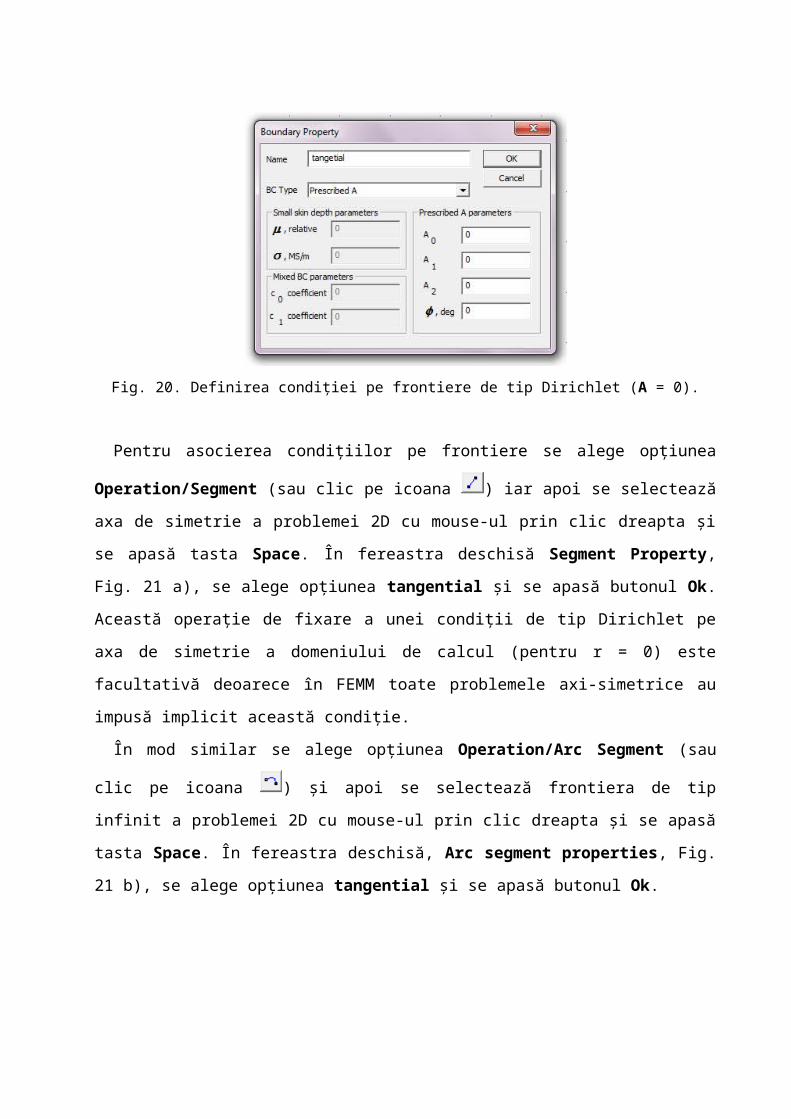
Fig. 36. Punctele noului domeniu de calcul unite cu segmente de dreaptă şi arce de cerc.
În continuare se clichează pe icoana , se selectează segmentul ce defineşte axa de simetrie
a bobinei şi se apasă tasta Tab pentru a i se atribui condiţia de frontieră tangential de tip
Dirichlet creată anterior. Apoi se clichează pe icoana , se selectează pe rând arcele de cerc ce
definesc frontierele domeniului de calcul şi se apasă tasta Tab pentru a li se atribui condiţia de
frontieră tangential.
Se construieşte reţeaua de discretizare folosind comanda Mesh/Create Mesh sau prin clic pe
icoana , Fig. 37. Problema este apoi rezolvată folosind comanda Analysis/Analyze sau prin
clic pe icoana . Pentru analiza rezultatelor se foloseşte comanda Analysis/View Results sau
clic pe icoana . În Fig. 38 sunt afişate liniile de câmp pentru noul domeniu de calcul.
Se recalculează fluxul magnetic pe suprafaţa definită de segmentul mărginit de aceleaşi
puncte B1(r1, z1) şi B2(r2, z2) unde r1 = 0, z1 = 0, r2 = 25, z2 = 0. Rezultatul numeric obţinut de
această dată este 9.79 10-6 Wb, fiind indicat în Fig. 39. Diferenţa relativă dintre fluxul magnetic
calculate iniţial şi cel recalculate este de circa 1,54% = 200.(9.79 – 9.64)/(9.79 + 9.64).
Fig. 37. Reţeaua de discretizare a noului domeniu de calcul.

Fig. 38. Liniile de câmp pentru noul domeniu de calcul.
Fig. 39. Fluxul magnetic recalculat.
Dacă se doreşte o precizie de calcul mai bună atunci frontiera domeniului de calcul trebuie
îndepărtată mai mult de zona surselor de câmp. Dacă de pildă se depărtează de două ori mai mult
frontiera de zona surselor de câmp (F1(r1, z1), F2(r2, z2) şi F3(r3, z3) caracterizate de r1 = 0,
z1 = -400, r2 = 0, z2 = 400, r3 = 400, z3 = 0) fluxul magnetic recalculat devine circa 9,8 .10-6 Wb,
Fig. 40. Diferenţa relativă faţă de valoarea anterioară a fluxului magnetic se reduce la circa
0,92% = 200.(9.797 – 9.788)/(9.797 + 9.788).
Fig. 40. Fluxul magnetic recalculat.
La încheiere se închide fereastra de post-procesare a soluţiei de câmp a problemei curente prin
clic pe icoana din colţul din dreapta sus a ferestrei și se salvează aplicaţia curentă folosind
comanda File/Save.
7.3. Bobină cilindrică cu miez feromagnetic alimentată în c.c.
În continuare se studiază câmpul magnetic produs de bobină în condiţiile în care aceasta este
prevăzută cu un miez feromagnetic, ca în Fig. 3b). Se va salva întâi aplicația sub numele
Bobina2 folosind comanda File/Save As.
Geometria bobinei studiate anterior va fi parţial modificată. În primul rând se şterge axa de
simetrie şi se adăugă două puncte noi (P1 şi P2) situate pe axa de simetrie.
Pentru a şterge axa de simetrie se apelează comanda Operation/Segment sau se clichează pe
icoana . Apoi se selectează cu mouse-ul prin clic dreapta segmentul de dreaptă ce defineşte
axa de simetrie a bobinei şi se apasă tasta Delete sau se apelează comanda Edit/Delete.
În continuare se adaugă punctele P1(r1, z1) şi P2(r2, z2) caracterizate de coordonatele: r1 = 0,
z1 = -20, r2 = 0, z2 = 20, Fig 41.

Fig. 41. Două puncte noi adăugate la domeniul de calcul.
Se reconstruieşte axa de simetrie a bobinei unind punctele vechi şi cele nou create ca în
Fig. 42. Punctele noi se unesc prin segmente orizontale cu punctele ce definesc bobina, ca în
pentru a putea construi regiunea Miez.
Se asociază noii frontiere a domeniului de calcul condiţia de tip Dirichlet tangential. Se
adaugă un nou material M36 Steel din baza de date predefinită în lista curentă. Se defineşte o
nouă etichetă pentru regiunea Miez şi se asociază noului material. Se reconstruieşte reţeaua de
discretizare, se rezolvă problema de câmp şi se analizează rezultatele.
Se recalculează fluxul magnetic pe aceeaşi suprafaţă definită la paragraful 6.3 şi se constată că
valoarea sa creşte de la 9,797.10-6 Wb la 2,692.10-5 Wb, adică de circa 2,75 ori. Se evidenţiază
astfel prin modelare numerică utilitatea miezurilor magnetice în funcţionarea dispozitivelor
electromagnetice în care avem nevoie de un flux magnetic cât mai mare (ex. la transformatoare şi
la generatoare electrice întrucât t.e.m. depinde de valoarea fluxului magnetic util, la motoare
electrice întrucât cuplul electromagnetic depinde de fluxul magnetic util, etc.). Același lucru se
evidențiază prin plotarea hărții inducției magnetice reprezentată pe noul domeniu de calcul,
Fig. 43. Se observă că în comparație cu rezultatele din Fig. 33, inducția magnetică maximă a
crescut de circa 6,68 ori, de la circa 9,128.10-3 T la o valoare de circa 6,099.10-2 T.

Fig. 42. Noul domeniu de calcul cu evidențierea regiunii Miez.

Fig. 43. Harta inducției magnetice pe noul domeniu de calcul.
La încheiere se închide fereastra de post-procesare a soluţiei de câmp a problemei curente prin
clic pe icoana din colţul din dreapta sus a ferestrei și se salvează aplicaţia curentă folosind
comanda File/Save.
7.4. Forţe în câmp magnetic. Piesă feromagnetică atrasă de câmpul magnetic produs de
bobina cilindrică cu miez feromagnetic alimentată în c.c.
Forţa electromagnetică ce acţionează asupra unui corp aflat în câmp magnetic, (se neglijează
efectul magnetostrictiv), se defineşte prin relaţia:
F=∫Vol
(JxB ) dv−12 ∫
Vol
(H2 grad μ)dv(6.1)
unde: J este densitatea de curent ce parcurge corpul studiat, B inducţia magnetică,
permeabilitatea magnetică, iar Vol reprezintă volumul corpului, adică domeniul de integrare.

În relaţia anterioară se disting două componente ale forţei electromagnetice, prima fiind
denumită Forţă Laplace, iar a doua Forţa magnetică.
Forţa Laplace reprezintă forţa ce acţionează asupra conductoarelor parcurse de curent situate
în câmp magnetic, iar Forţa magnetică reprezintă forţa de atracţie dintre o piesă feromagnetică
şi un câmp magnetic sau dintre doi magneţi permanenţi.
Forţa electromagnetică poate fi calculată prin integrare numerică conform relaţiei de mai sus
sau poate fi calculată aplicând alte metode precum: Metoda Lucrului Mecanic Virtual sau
Metoda Tensorului Tensiunilor Maxwelliene.
Conform Metodei Lucrului Mecanic Virtual, forţa ce acţionează în lungul unei coordonate
x asupra unui corp solid situat în câmp magnetic este egală cu derivata energiei magnetice în
raport cu acea coordonată:
F = [-W/x] . nx (6.2)
unde nx reprezintă vectorul unitate corespunzător coordonatei x.
Forţa exercitată asupra unui corp situat în interiorul unei suprafeţe închise se poate calcula
aplicând Metoda Tensorului Tensiunilor Maxwelliene prin relaţia:
F=∫Σ
[(B⋅n )H−12
μH2n ]dΣ(6.3)
unde n reprezintă vectorul normal la suprafaţa închisă .
În continuare se va calcula forţa ce acţionează asupra unui corp feromagnetic situat în
vecinătatea bobinei. Se va salva întâi aplicația sub numele Bobina3 folosind comanda
File/Save As.
Pentru acest studiu se pleacă de la problema studiată anterior şi se operează anumite
modificări. În primul se șterge segmentul de dreaptă de deasupra miezului magnetic ce definește
axa de simetrie a bobinei. Apoi se adaugă geometriei domeniului de calcul din Fig. 42 noi puncte
conform Tabel 2 care definesc regiunea piesa (piesă feromagnetică), Fig. 44.

Tabel 2. Coordonatele punctelor ce definesc regiunea Piesa
x [mm] 0 12,5 0 12,5
y [mm] 21 21 31 31
Fig. 44. Patru puncte noi adăugate la domeniul de calcul.
Punctele noi se unesc prin patru segmente în vederea construirii regiunii Piesa. Apoi se
reconstruieşte axa de simetrie a bobinei unind punctele vechi şi cele nou create ca în Fig. 45.

Fig. 45. Noul domeniu de calcul cu evidențierea regiunii Piesa.
Se asociază noii frontiere a domeniului de calcul condiţia de tip Dirichlet tangential. Se
adaugă un nou material M43 Steel din baza de date predefinită în lista curentă.
Se defineşte o nouă etichetă pentru regiunea Piesa şi se asociază noului material. Se
reconstruieşte reţeaua de discretizare, se rezolvă problema de câmp şi se analizează rezultatele.
Pentru a calcula forța ce acționează asupra regiunii Piesa se apelează opțiunea
Operation/Areas sau clic pe icoana . Apoi se face clic pe regiunea Piesa și se apelează
comanda Integrate sau clic pe icoana . În fereastra Block Integrals, Fig. 46, care se deschide
se alege opțiunea Force via Weighted Stress Tensor. În urma calculelor se obține valoarea Fz =

-0.21651 N ceea ce înseamnă o forță de atracție exercitată asupra regiunii Piesa de către câmpul
produs de bobină, Fig. 47.
Fig. 46. Calculul forței cu ajutorul Metodei Tensorului Tensiunilor Ponderate.
Fig. 47. Valoarea numerică a forței ce acționează asupra regiunii Piesa.
Prin simulări succesive pentru diferite distanțe față de miezul bobinei a regiunii Piesa se poate
determina influența distanței asupra forței de atracție. Pentru a determina această dependență o
soluție presupune ștergerea punctelor și liniilor ce definesc regiunea Piesa și reconstruirea lor pe
poziții decalate pe verticală în sus cu 1 mm în raport cu pozițiile inițiale, reconstruirea rețelei de
discretizare, recalcularea forței magnetice și așa mai departe. Dependența Forță - Distanță are o
alură ca cea din Fig. 48.
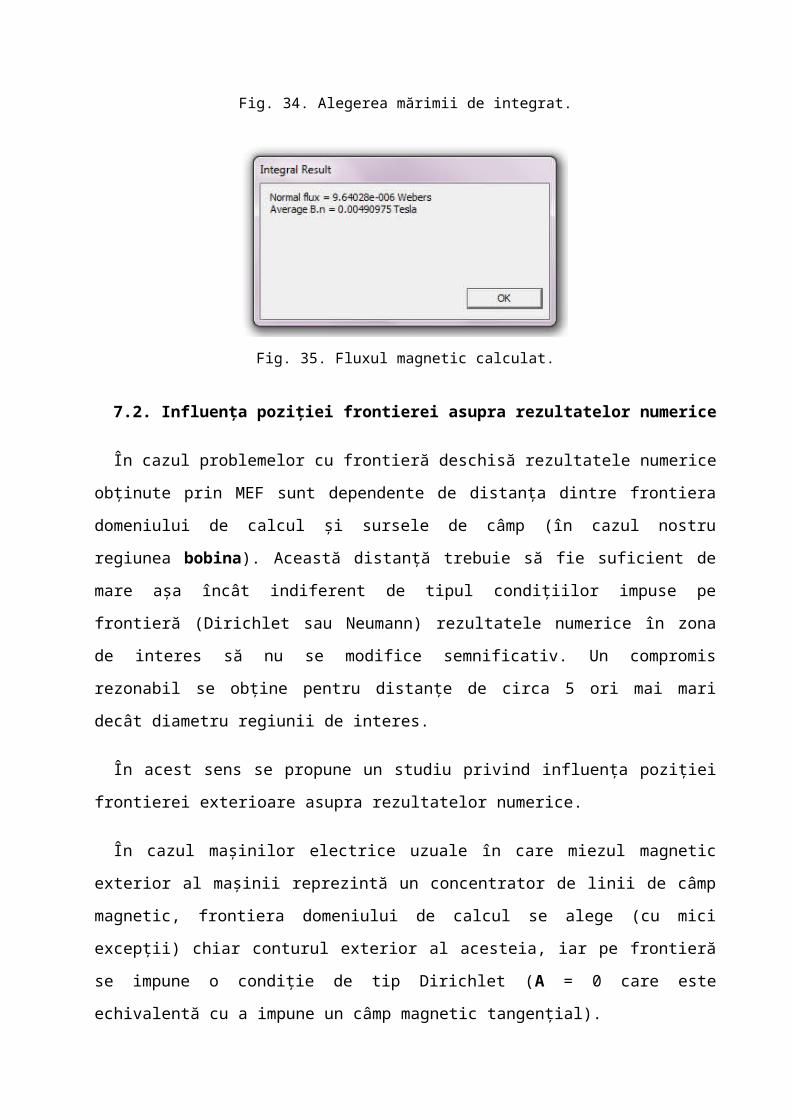
Fig. 48. Variația forței de atracție funcție de distanța dintre regiunea Piesa și bobină (dependența Forță – Distanță).
Altă metodă de a calcula dependența Forță – Distanță constă în rezolvarea parametrizată a
unui set de probleme folosind limbajul Lua în fișiere script. Pentru aplicația de față trebuie
salvată secvența de instrucțiuni de mai jos în fișierul Forta_Distanta.lua din directorul curent:
showconsole()
clearconsole()
print("Pozitie in mm | Forta in N")
mi_saveas("temp.fem")
for n=1,20,1 do
mi_analyze()
mi_loadsolution()
mo_groupselectblock(1)
f=mo_blockintegral(19)
print(n,f)
mo_close()
mi_seteditmode("group")
mi_selectgroup(1)
mi_movetranslate(0,1)
end
După salvarea fișierului script de mai sus acesta se lansează în execuție prin apelul comenzii
din bara de meniuri din stânga ferestrei grafice, în condiția în care aplicația de bază este
deschisă (în cazul de față aplicația Bobina3.fem). Rezultatele obținute vor fi afișate în fereastra
Lua Console, Fig. 49, și pot fi copiate cu mouse-ul și prelucrate în Excel.
Fig. 49. Rezultate afișate în fereastra Lua Console.
Prin analiza rezultatelor din Fig. 48 se observă că pe măsură ce piesa se depărtează de bobină
forța de atracție scade aproximativ exponențial.
La încheierea sesiunii de lucru se închide fereastra de post-procesare a soluţiei de câmp a
problemei curente prin clic pe icoana din colţul din dreapta sus a ferestrei și se salvează
aplicaţia curentă folosind comanda File/Save.


















