elemente de executie
49
Tehnologie general ă Autor – Prof. Dr. Ing. Adriana Trifu 1 ECHIPAMENTE ELECTRONICE DE AUTOMATIZARE 1.1 CONSIDERAŢII GENERALE Sistemele automate fac parte, din punct de vedere teoretic, din categoria mai largă de sisteme.Este dificil de dat o definiţie riguroasă noţiunii de sistem. O defini ţie posibilă ar fi aceea care precizează că sistemul este un model fizic realizabil al unui ansamblu de obiecte naturale sau create artificial în care unele mărimi reprezint ă cauza, iar altele, efectul. Reglarea, într-un proces tehnologic, are rolul de a aduce şi a menţine o mărime fizică la o anumită valoare. Mărimea fizică asupra căreia se intervine, numită mărime reglată, poate fi de orice natur ă : • presiune; • debit; • nivel; • temperatur ă; • turaţie; • tensiune; • curent; Valoarea la care trebiue adus ă mărimea reglată este numită mărime de referinţă. Într-o instala ţie tehnologică procesele nu se desf ăşoar ă niciodată în stare de echilibru. Ele sunt continuu perturbate , fiind necesar în permanen ţă să se facă reglarea în vederea compens ării efectului perturba ţiilor. Perturbaţiile care introduc dezechilibre într-un proces pot fi din interiorul procesului sau din exteriorul acestuia.În procesul de reglare mărimea reglată este măsurată şi comparată prin diferen ţă cu mărimea de referinţă. În cazul în care această diferenţă este diferită de zero, în procesul reglat are loc o corectare, ce va avea ca efect obţinerea egalităţii între mărimea reglat ă şi mărimea prescrisă. SISTEM 1.1.1 efecte Sisteme cauze Terminale (legături cu exteriorul) Figura 1.1 Sistemul – conform noţiunii de “black-box” REGLARE, MĂRIME REGLATĂ, MĂRIME DE REFERINŢĂ 1.1.2
-
Upload
cristina-craciunescu -
Category
Documents
-
view
206 -
download
0
Transcript of elemente de executie
Tehnologie general
ECHIPAMENTE ELECTRONICE DE AUTOMATIZARE1.1 CONSIDERAII GENERALE Sistemele automate fac parte, din punct de vedere 1.1.1 teoretic, din categoria mai larg de sisteme.Este dificil SISTEM de dat o definiie riguroas noiunii de sistem. O definiie posibil ar fi aceea care precizeaz c sistemul este un model fizic realizabil al unui ansamblu de obiecte naturale sau create artificial n care unele mrimi reprezint cauza, iar altele, efectul. cauze
Sisteme
efecte
Terminale (legturi cu exteriorul) Figura 1.1 Sistemul conform noiunii de black-box
1.1.2
REGLARE, MRIME REGLAT, MRIME DE REFERIN
Reglarea, ntr-un proces tehnologic, are rolul de a aduce i a menine o mrime fizic la o anumit valoare. Mrimea fizic asupra creia se intervine, numit mrime reglat, poate fi de orice natur : presiune; nivel; turaie; curent; debit; temperatur; tensiune; Valoarea la care trebiue adus mrimea reglat este numit mrime de referin. ntr-o instalaie tehnologic procesele nu se desfoar niciodat n stare de echilibru. Ele sunt continuu perturbate, fiind necesar n permanen s se fac reglarea n vederea compensrii efectului perturbaiilor. Perturbaiile care introduc dezechilibre ntr-un proces pot fi din interiorul procesului sau din exteriorul acestuia.n procesul de reglare mrimea reglat este msurat i comparat prin diferen cu mrimea de referin. n cazul n care aceast diferen este diferit de zero, n procesul reglat are loc o corectare, ce va avea ca efect obinerea egalitii ntre mrimea reglat i mrimea prescris.
Autor Prof. Dr. Ing. Adriana Trifu
1
Echipamente electronice de automatizare Cnd corectarea se face de ctre un operator , reglarea este numit manual; dac operaiile care conduc la restabilirea echilibrului sunt efectuate numai de ctre dispozitive prevzute n acest scop, reglarea este numit automat. Sistemul automat reprezint reuniunea a dou 1.1.3 subsisteme : SISTEM 1. instalaia tehnplogic (procesul automatizat) (IT) AUTOMAT 2. dispozitivul de automatizare (DA) Dispozitivul de automatizare stabilete algoritmul de conducere a procesului, eliminnd astfel intervenia direct a omului n desfurarea procesului tehnologic.
Pir u y
DAyr
PROCES
Fig 1.2. Reprezentarea simbolic a unui proces automat cu o singur intrare i o singur ieire.
Notaiile din fig. 1.2. au urmtoarea ssemnificaie : r mrimea de referin sau programul sistemului y mrimea de ieire u mrimea de comand sau de conducere a yr mrimea de reacie procesului PI mrimea perturbatoare ntr-un sistem automat, esenial este prezena reaciei.. Reacia este legtura invers dintre procesul automatizat i dispozitivul de automatizare. Se aduc astfel, n permanen, la cuntina dispozitivului de automatizare, informaii cu privire la valoarea mrimii de ieire y. Pe baza acestor informaii dispozitivul de automatizare ia decizii. .n absena acestor informaii sistemul n ansamblu nu poate reliza corelaia necesar r y. Mrimile perturbatoare PI care afecteaz procesul se datoresc: 1. Sarcinilor variabile cu care lucreaz procesul tehnologic 2. Influenei factorilor externi asupra elementelor 3. Uzurii i procesului de mbtrnire a elementelor ntr-un proces de producie automatizat (fig. 1.2) 1.2 mrimea de ieire y poate fi modificat dup dorin, AVANTAJELE n conformitate cu anumite cerine impuse, n AUTOMATIZRII condiiile n care se urmrete eliminarea interveniei directe a omului. 2
Tehnologie general Se contureaz astfel principalele avantaje ale automatizrii: Creterea calitii produselor Economisirea energiei consumate Funcionarea continu a instalaiei Reducerea efortului (intelectual i tehnologice la aceeai precizie chiar fizic) depus de oameni n cadrul Creterea productivitii muncii unui proces de producieObservaie ! n cadrul unui proces cu reglare manual operatorul efectueaz operaii de citire (la intervale destul de dese), comparare, memorare, calcul mintal sau execut manevrri ale elementelor de reglare (care solicit fora sa fizic)
1.3
ELEMENTELE COMPONENTE ALE UNUI SISTEM DE REGLARE AUTOMAT (SRA)
Pentru studierea unui sistem de reglare automat este util schema sa bloc n care sunt indicate elementele componente (reprezentate individual sau grupate), legturile ntre aceste elemente, mrimile care se transmit prin aceste legturi i sensul de transmitere.Fig. 1.3. Schema bloc a unui SRA
P1 e
Pm
r1
Tr1
+
R
u
EE
m
IT
y
Trn figura 1.3. este dat schema bloc a unui sistem de reglare automat, n care:Tr1- este traductorul de intrare (necesar n situaiile n care mrimea de referin este o mrime neelectric). El convertete mrimea de referin neelectric (r1) n mrime electric (r); EC- este elementul de comparaie; el are dou intrri pe care se aplic mrimea de intrare r i respectiv mrimea de reacie yr; mrimea de ieire din EC e numete mrime de acionare (e); elementul de comparaie face diferena dintre r i yr. RA - este regulatorul automat; el asigur o anumit dependen n timp u = f (e) astfel nct variaia n timp a mrimii de ieire s tind ct mai mult ctre cea dorit; n principal, regulatorul nlocuiete operatorul din sistemele de reglare manual; n realizrile constructive, regulatorul i elementul de comparaie formeaz de obicei o unitate care are ca mrimi de intrare mrimile r i yr i ca mrime de ieire mrimea u. EE -este elementul de execuie; mrimea de comand se aplic la intrarea elementului de execuie EE; mrimea de ieire a EE, denumit mrime de execuie (m) se aplic procesului (IT) pentru a
Autor Prof. Dr. Ing. Adriana Trifu
3
Echipamente electronice de automatizarecontrola desfurarea acestuia; mrimea de ieire din proces (y) va putea fi modificat, compensndu-se efectul perturbaiilor. IT -este instalaia tehnologic; Tr2- este traductorul de ieire; el transform mrimea de ieire (y) n caz general de natur neelectric n mrimea de reacie yr.
CLASIFICAREA SISTEMELOR AUTOMATETabelul 1 CRITERIUL 1. Dup numrul mrimilor de comand i al parametrilor reglai 2. Dup modul de variaie n timp a mrimii (sau mrimilor ) de referin 3. Dup dependena legii de variaie y = f ( r ) de valoarea mrimilor electrice din sistem 4. Dup modul de variaie n timp a mrimilor electrice principale
Sistemele automate pot fi clasificate dup diferite criterii. Majoritatea sistemelor automate pot fi ncadrate conform criteriilor stabilite de tabelul 1.
5. Dup viteza de variaie a mrimilor electrice din interiorul SRA 6. Dup gradul de adaptare a sistemului la parametrii instslaiei tehnologice 7.Dup caracteristicile constructive
TIPUL SISTEMULUI AUTOMAT SRA monovariabile (cu o singur intrare i o singur ieire) SRA multivariabile (cu mai multe intrri i mai multe ieiri) Sisteme de stabilizare la care r este const. Sisteme cu program la care r variaz dup un program prestabilit Sisteme cu urmrire la care mrimea r variaz arbitrar SRA liniare (legea de variaie y=f(r) este independent de valoarea mrimilor r, e, u, y, SRA neliniare (legea de variaie y = f(r ) se modific o dat cu creterea mrimilor menionate SRA continue (mrimile electrice care se transmit de la un bloc la altul sunt diferite de zero pe toat axa timpului) SRA discrete (mrimile electrice care se transmit de la un bloc la altul iau valori diferite de zero doar pentru anumite valori ale timpului) SRA pentru procese lente SRA pentru procese rapide SRA cu acordare fix SRA cu acordare automat (autoadaptive)
8. Dup natura elementelor constructive folosite
SRA specializate ( destinate unui anumit proces tehnologic sau unei clase restrnse de procese tehnologice) SRA unificate (construite din elemente de automatizare care se pot interconecta n mai multe moduri deoarece semnalele mrimile electrice la intrarea i la ieirea lor variaz n aceeai gam) SRA electronice SRA pneumatice SRA hidraulice SRA mixte (electrohidraulice, electropneumatice)
4
Tehnologie general Avnd ca date iniiale structura i parametrii elementelor componente ale unui sistem se pot determina REGIMURILE DE FUNCIONARE performanele acestui sistem. ALE SISTEMELOR DE REGLAJ Este necesar cunoaterea variaiei AUTOMAT n timp a mrimii de ieire ca urmare a variaiei mrimii de intrare sau a mrimilor perturbatoare pentru a putea determina performanele staionare i tranzitorii ale SRA (corespunztoare celor dou regimuri posibile de funcionare ale unui SRA). Regimul normal de funcionare al unui SRA este regimul staionar. Acesta este definit ca regimul n care mrimile y i r au aceeai form de variaie n timp. Un sistem automat care are propietatea da a restabili prin aciunea sa un nou regim staionar atunci cnd a fost scos dintr-un regim staionar anterior (datorit variaiei mrimii de intrare sau a unei perturbri) este un sistem stabil. Pe durata regimului tranzitoriu mrimile reglate pot avea valori i variaii nepermise, care pot afecta instalaia tehnologic comandat. Pentru a se putea stabili din proiectare msurile necesare pentru protejarea instalaiei i procesului tehnologic, este important cunoaterea procesului tranzitoriu. n practic sunt utilizabile numai sistemele automate stabile.1.5 1.6
PERTURBAII CARE APAR N DESFURAREA PROCESELOR
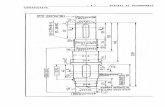
Perturbaiile pot avea caracteristici foarte diferite i care nu pot fi prevzute. Perturbaiile pot fi de mai multe feluri: a) schimbri de sarcin (de exemplu ntr-un schimbtor de cldur fig, 1.4. schimbarea debitului sau a temperaturii fluidului A impune creterea sau scderea debitului de lichid B pentru a se readuce, la valoarea prescris, temperatura fluidului A).A fluid de nclzit B fluid nclzitor 1. rezervor prin care circul fluidul A care trebuie nclzit 2. cma prin care circul fluidul nclzitor B 3. robinet cu care se modific debitul fluidului A 4. robinet cu care se modific debitul fluidului B
A 4 B
1 2 3
Fig. 1.4. Schimbtor de cldur
Autor Prof. Dr. Ing. Adriana Trifu
5
Echipamente electronice de automatizare b) schimbri n caracteristicile agentului cu care se realizeaz reglarea (de exemplu ntr-o reglare de temperatur n care agentul nclzitor este aburul, dac temperatura acestuia scade, va fi necesar creterea debitului pentru atingerea temperaturii prescrise). c) Schimbri n condiiile ambiante (de exemplu variaiile temperaturii n jurul utilajelor n care are loc o reglare de temperatur). d) Schimbri n caracteristicile interne ale procesului (de exemplu desfurarea procesului ntr-un reactor de polimerizare: la nceput este necesar un debit de abur pentru a nclzi reactorul, iar ulterior este necesar ap de rcire pentru a menine temperatura la valoarea prescris) e) Modificarea mrimii de referin : o perturbare exterioar procesului este introdus n mod voit pentru ca mrimea reglat s satisfac anumite cerine Observaii: 1 Nu au fost menionate perturbaiile care pot apare n alimentarea sau funcionarea elementelor dispozitivului de automatizare, care pot fi neglijate dac elementele de automatizare alese au o fiabilitate i o precizie care s corespund cerinelor procesului reglat 2 Influena unei perturbaii asupra mrimii reglate depinde i de locul unde acioneaz perturbaia. Pentru procesul din figura 1.4, modificarea debitului sau temperaturii fluidului nclzitor B constituie modificri n alimentarea cu energie a procesului (ele apar la intrarea proceului). Modificarea debitului sau temperaturii fluidului nclzit A constituie perturbaii n sarcina procesului (apar n interiorul procesului). Dac perturbaiile importante sunt de primul tip, este mai uor de obinut un sistem de reglare satisfctor. Perturbaiile de sarcin sunt mai greu de corectat n timp util (mai ales dac perturbaia acioneaz mai aproape de punctul n care se face msurarea parametrului reglat).
TRADUCTOARE
1.7
Traductorul este echipamentul care transform mrimea de msurat (parametrul reglat) ntr-o alt mrime (de obicei o mrime electric) n Definiie, clasificare vederea prelucrrii de ctre elementele de automatizare sau de sisteme de prelucrare automat a datelor. Un traductor (fig. 1.5) are n general urmtoarele elemente: elementul sensibil (ES) sau detectorul (specific mrimii msurate)1.7.1
6
Tehnologie general
adaptorul (A) are rolul de a prelucra i converti semnalul furnizat de ES ntr-o mrime utilizabil direct n SRA ESFig. 1.5 Traductorul Element de legtur i transmisie
A Adaptor
u
Element sensibil (detector )
y
Surse auxiliare de energie
Clasificarea traductoarelor poate fi fcut dup mai multe criterii, dar cele mai importante sunt cele corespunztoare tabelului 1.2.Tabelul 1.2 CRITERIUL 1. Dup principiul de funcionare a elementului sensibil TIPUL TRADUCTORULUI traductoare generatoare (funcionarea se bazeaz pe transformarea direct a energiei mrimii de msurat ntr-o energie asociat mrimii de ieire de obicei o mrime electric) Ex: termocupluri, traductoare piezoelectrice, traductoare parametrice (funcionarea se bazeaz pe modificarea unui anumit parametru, caracteristic unui circuit electric, sub aciunea mrimii de msurat) ex: termorezistene, traductoare rezistive, capacitive, etc. 2. Dup natura mrimii msurate traductoare pentru mrimi electrice traductoare pentru mrimi neelectrice ex: tensiune, curent, frecven, putere, etc ex: traductoare de poziie i deplasare, traductoare pentru msurarea temperaturii, presiunii, nivelului, traductoare pentru msurarea forrlor i cuplurilor, vitezelor i acceleraiilor etc. 3. Dup forma mrimii de la ieire traductoare analogice ( dependena dintre mrimea fizic msurat i mrimea rezultat la ieire este o funcie continu liniar sau neliniar) traductoare cu impulsuri (mrimea de ieire este o succesiune de impulsuri modulate n amplitudine, durat sau frecven, n funcie de mrimea de intrare) traductoare numerice (rezultatul msurrii este prezentat sub form numeric, ca urmare a msurrii unei succesiuni de impulsuri codificate)
Autor Prof. Dr. Ing. Adriana Trifu
7
Echipamente electronice de automatizare 1.7.2 CARACTERISTICI GENERALE
Principalele caracteristici ale unui traductor sunt: liniaritatea pragul de sensibilitate caracteristicile dinamice domeniul de msurare puterea de rezoluie sensibilitatea clasa de precizie a)liniaritatea presupune proporionalitatea ntre mrimile de la intrarea i ieirea traductorului pe tot domeniul de msurare. Liniaritatea se refer la caracteristica static a traductorului (care poate fi liniar sau neliniar). Observaie: Cu ct domeniul de liniaritate al unui traductor este mai mare, cu att traductorul este mai bun. b)domeniul de msurare se exprim prin intervalul n cadrul cruia se face corect msurarea
u = uM um
uM reprezint valoarea maxim a mrimii de intrare; um reprezint valoarea minim a mrimii de intrare;
Exemplu:: Pentru o termorezisten 0 2500 C. c) Sensibilitatea unui traductor este calitatea acestuia de a determina variaii mari ale mrimii de ieire la apariia unor variaii reduse la intrare. Sensibilitatea (S) se exprim ca raportul dintre variaia semnalului de la ieire i variaia S=y/u semnalului de intrare: Observaie Pentru o caracteristic liniar
S = K = ct.
d) Pragul de sensibilitate reprezint variaia minim a mrimii de msurat care determin o variaie a mrimii de ieire cel puin egal cu eroarea admisibil a traductorului. f) Puterea de rezoluie a unui traductor se obine dac se raporteaz pragul de sensibilitate la domeniul de msurat. Puterea de rezoluie (prag de sensibilitate relativ) exprim propietatea traductorului de a distinge dou valori ct mai apropiate una de alta ale mrimii de msurat. g) Clasa de precizie a unui traductor se exprim ca raportul dintre eroareaObservaie Valorile uzuale ale clasei de precizie sunt 0,1 2 %.
c [ %] = (uad / uM um)* 1008
Tehnologie general admisibil uad carese produce n regim static de funcionare i domeniul de msurare: f) Caracteristicile dinamice se exprim prin principalele performane ataate rspunsului tranzitoriu al traductorului pentru semnal treapt la intrare (fig. 1.6) : durata rspunsului tranzitoriu (tt), timpul de cretere (tc), timpul de ntrziere (tI), suprareglajul ( ) etc (fig. 1.7). Durata regimului tranzitoriu (tt) sau timpul de rspuns reprezint intervalul de u Fig. 1.6 Semnalul treapt timp dintre nceputul procesului 1 tranzitoriu i momentul n care valoarea absolut a diferenei (y -yst) scade sub o t anumit limit fixat, fr a mai depi ulterior aceast limit. Observaie: de regul, limita fixat este de +/- 5%. Timpul de cretere (tc) reprezint intervalul de timp n care mrimea de ieire evolueaz ntre 0,05 yst i 0,95 yst. Timpul de ntrziere (tI) reprezint timpul neccesar ca mrimea s evolueze ntre valoarea zero i valoarea corespunztoare regimului staionar (yst). Suprareglajul () reprezint depirea maxim de ctre mrimea de ieire aFig 1.7 Rapunsul unui SRA la o intrare treapt unutar y1,05 0,95 0,5 0,05
Legend1,00
tc ti tt
timp
mrimii de regim staionar (yst). Observaie: O valoare prea mare a suprareglajului poate determina o nrutire a calitii rspunsului tranzitoriu i o deteriorare a procesului tehnologic.
Autor Prof. Dr. Ing. Adriana Trifu
9
Echipamente electronice de automatizare 1.7.3
TRADUCTOARE PENTRU MSURAREA POZIIEI I DEPLASRILOR
Nu exist o delimitare precis ntre traductoarele de poziie i traductoarele de deplasare. Unele dintre ele pot fi utilizate att ca traductoare de poziie ct i ca traductoare ale deplasrii. n general traductoarele de poziie (liniare sau unghiulare) difer fa de cele de deplasare. Traductoarele de poziie msoar poziia (deci implicit i deplasarea), pe cnd traductoarele de deplasare msoar numai deplasrile, fr s indice n principiu i poziia obiectululi. Principalele tipuri de traductoare pentru msurarea poziiei deplasrilor sunt traductoarele: Rezistive De tip transformator Inductive Numerice absolute i incrementale Capacitive 1.7.3.1 TRADUCTOARE REZISTIVE Traductoarele rezistive sunt caracterizate prin faptul c sub aciunea mrimii de msurat are loc variaia (n trepte sau continuu) rezistenei unuui circuit electric.De regul modificarea rezistenei se face printr-o intervenie macanic. cu contacte reostaticeFig. 1.8
Traductoarele rezistive pot fi:
a) Traductoarele rezistive cu contact utilizeaz modificarea valorii rezistenei sub aciunea mrimii de msurat (poziie, deplasare), de regul prin nchiderea n trepte a unor contacte care scurtcircuiteaz poriuni ale rezistenei. Acest tip de traductoare este utilizar n scheme de acionare discontinu simpl, de semnalizare a poziiei, etc. b) Traductoarele rezistive reostatice sunt rezistene bobinate speciale pe care se pote deplasa un cursor acionat de mrimea de msurat (fig. 1.8 b). Rezistena total a traductorului este de ordinul ( ).
+Uy
b
Ui
10
Tehnologie general+ Ui Fig. 1.8 Traductoare rezistive
Is RRxx
a Rs
Uy
Materialele folosite la relizarea bobinajului au variaii mici ale rezistenei cu temperatura. Ex.: constantan, crom- nichel, etc. Observaie: Traductoarele rezistive se utilizeaz, de regul, pentru msurarea poziieideplasrilor liniare de ordinul mm cm i unghilare (grade sau zeci de grade).
1.7.3.2
TRADUCTOARE INDUCTIVE
Funcionarea traductoarelor inductive se bazeaz pe variaia impedanei unei bobine sub aciunea mrimii de msurat (poziie sau deplasare).Sunt traductoare parametrice. Din punct de vedere constructiv exist dou tipuri de traductore inductive: 1. cu ntrefier variabil Traductor cu ntrefier variabil x Fig 1.9 2. cu miez mobil L a) Traductoare cu ntrefier variabil Mrimea de msurat (poziie N ~ sau deplasare) modific ntrefierul unui electromagnet x prin modificarea distanei x dintre armturi sau a suprafeei comune Sc dintre cele dou armturi ale electromagnetului (fig. 1.9) b) Traductoare cu miez mobil Mrimea de msurat, prin modificarea poziiei miezului mobil (fig. 1.10), determin modificarea reluctanei magnetice a circuitului, respectiv a inductanei lui. Sunt traductoare de tip parametric.Sc
~
Bobin
L
N
xMiez mobil
x x
Fig. 1.10 Traductor cu miez mobil
Autor Prof. Dr. Ing. Adriana Trifu
11
Echipamente electronice de automatizare1.7.3.3
TRADUCTOARE CAPACITIVE
n cazul traductoarelor capacitive mrimea de msurat (poziie sau deplasare) acioneaz asupra unui condensator, modificndu-i capacitatea. n funcie de parametrul prin care
- reprezint permitivitatea dielectricului A reprezint suprafaa armturilor x - reprezint distana dintre ermturi
C=
Ad(1.5)
se controleaz valoarea capacitii (, A, x), exist trei variante principale de realizare a traductorilor capacitivi (i respsctiv a caracteristicilor lor statice): cu distana x ntre armturi variabil fig. (1.11.a) cu suprafaa comun Ac variabil (fig. 1.11.b) cu dielectricul variabil (1.11.c)x x x C CAc
x
C
a
x
b
x
c
x
Fig. 1.11 Traductoare capacitive 1.7.3.4TRADUCTOARE DE TIP TRANSFORMATOR (SELSIN I INDUCTOSIN)
Selsinul este un transformator rotativ. Funcionarea sa se bazeaz pe fenomenul de inducie electromagnetic. Selsinul este des utilizat ca traductor de poziie unghiular n echipamentele de msur i control ale mainilor unelte. El este asemntor constructiv cu o main electric i este alctuit din dou nfurri: stator i rotor.nfurrile pot fi reallizate fiecare sub form monofazat, bifazat, trifazat sau polifazat. Cea mai utilizat combinaie este: pentru stator trifazat n stea, iar pentru rotor nfurare monofazat. 12
Tehnologie general Principiul de funcionare al unui selsin poaate fi studiat considernd statorul i rotorul cu nfurri monofazice (fig. 1.12).
es es
Fig. 1.12 Funcionarea unui selsin
E1 tE2 cos
eR
eR
t
1500; pentru obinerea uneiliniariti de +/- 2 %, aceast gam este sub 300).
Se consider c se aplic statorului o tensiune alternativ: es = E1 sin t (1.6) care va determina un flux magnetic variabil n timp. Acesta va induce n rotor o tensiune eR de aceeai frecven, a crei valoare va depinde de cuplajul nfurrilor rotorului cu fluxul statorului. eR = (E2 sin t ) cos (1.7) Dac rotorul este rotit cu unghiul fa de stator, tensiunea indus va fi: Avantajele selsinelor sunt legate de simplitatea lor constructiv i sigurana n funcionare, ceea ce a determinat utilizarea lor ca traductoare de poziie. Dezavantajul utilizrii selsinelor const n convertirea univoc a poziiei n tensiune i numai ntr-un domeniu relativ mic. (Gama de lucru este n general de 1100 n cazul msurrii poziiei sau deplasrilor rectilinii, apare un alt dezavantaj al selsinelor, fiind necesar transformarea micrii rectilinii n micare de rotaie. Inductosinul liniar este de fapt tot un selsin, dar desfurat n plan, fr miez de fier i care poate fi utilizat n mod direct pentru a msura poziia sau deplasarea fr a fi necesar transformarea micrii rectilinii n micare unghiular. Inductosinul trebuie alimentat cu tensiuni de frcvene mari (de regul 1 20 KHz). 1.7.3.5 TRADUCTOARE NUMERICE INCREMENTALE I ABSOLUTE
Traductoarele numerice permit prelucrarea simpl a informaiei furniznd forma numeric a mrimii msurate (poziie, deplasare), fr utilizarea convertoarelor Autor Prof. Dr. Ing. Adriana Trifu 13
Echipamente electronice de automatizare analog-numerice. n comanda numeric a mainilor unelte i n alte aplicaii forma numeric a mrimii msurate este obinut direct, oferind avantaje economice ct i legate de precizia echipamentului. Precizia, n acest caz depinde de numrul de cifre cu care este aproximat mrimea real. Exist dou tipuri de traductoare numerice pentru msurarea poziiei i deplasrilor: incrementale absolute a) Traductoare numerice incrementale se bazeaz pe folosirea metodei de msurae incremental (numit i metoda creterilor). Aceast metod presupune mprirea unei distane D , date, n cuante de deplasare d, astfel nct fixndu-se o poziie de zero (0), fiecrei poziii P1 PI i vor corespunde un numr N de cuante de deplasare. Principiul va fi ilustrat cu un sistem pentru msurarea poziiei i a deplasrilor saniei unei maini unelte (fig. 1.13).4 NI 1 Fig 1.13 25 O P1 P2 Pi
3
Fig. 1.13 Sistem pentru msurarea poziiei i deplasrilor saniei unei maini unelte 1 sanie; 2. urub de avans; 3. rigl de msurare incremental 4.- motor de acionare 5.- cuant de deplasare d
Rigla, care are o reea de linii divizat n cuante (d) este citit de ctre un dispozitiv de citire. Dispozitivul transform fiecare diviziune ntr-un impuls eelectric. Imaginea numeric a deplasrii nsumate ntr-un numr de impulsuri. Msurarea deplasrilor se face prin nsumarea deplasrilor pariale efectuate. Numrtorul de impulsuri utilizat de dispozitivul de citire este reversibil, oferind astfel posibilitatea de a sesiza i direcia deplasrii. Impulsurile individuale sunt adunate sau sczute din coninutul numrtorului dup cum sania se ndeprteaz sau se apropie de poziia de zero. Soluia cea mai utilizat pentru citire este citirea fotoelectric. Sistemele de msurare incremental pot lucra att liniar ct i rotativ. b) Traductoarele numerice absolute folosesc codificarea direct a poziiei n dispozitivul de msurare (pe disc sau rigl), astfel nct fiecrei poziii i corespunde un numr binar (de obicei cod Gray). 14
Tehnologie general Este o metod mai costisitoare dect metoda incremental, partea electronic de prelucrare a semnalelor fiind mult mai complicat. Codul Gray nu poate fi folosit ulterior n calcule i de aceea sunt necesare convertoare de cod (de exemplu din codul Gray n cod binar). Sistemele de msurare numeric pot lucra, ca i cele incrementale att liniar ct i rotativ. Traductorul pentru msurarea vitezelor determin viteza unghiular (turaia) unei micri de rotaie. Vitezele liniare pot fi msurate printr-o metod indirect (determinnd viteza
1.7.4 TRADUCTOARE PENTRU MSURAREA VITEZELOR
unghiular sau pe alte principii). Funcionarea traductoarelor de turaie se bazeaz pe fenomenul de inducie electromagnetic (n cazul tahogeneratoarelor de curent continuu i curent alternativ), pe efectul stroboscopic, pe msurarea unei succesiuni de impulsuri electrice sau electro-optice (n cazul tahometrelor cu impulsuri) etc. Tahogeneratoare sunt considerate toate tipurile de generatoare de curent (continuu 1.7.4.1 sau alternativ) a cror tensiune la borne este TRADUCTOARE DE INDUCIE DE TIP TAHOGENERATOR proporional cu turaia rotorului. n cazul tahogeneratoarelor de curent alternativ poate fi utilizat pentru msurarea turaiei i dependena dintre aceasta i frecvena tensiunii induse. Rotorul este antrenat de elementul cruia trebuie s i se msoare turaia. Datorit cmpului magnetic permanent creat de magneii permaneni ai statorului, n nfurrile rotorului se induce o t.e.m. a crei E = Ke = 1 = 2 n (1.8) amplitudine depinde (practic liniar) de turaia rotorului: e reprezint t.e.m. indus - reprezint fluxul magnetic produs de magnetul permanent sau sursa extern - reprezint viteza unghiular n turaia (rot/min) Ke, K1, K2 reprezint constante de proporionalitate Observaie: n cazul unui tahogenerator de curent continuu, caracteristica static este liniar. Ea este de regul precizat prin panta sa. (Exemplu: 60V / 3000 rot/min).Liniaritatea se menine pn la o anumit turaie (de cteva ori turaia nominal), dup care saturaia miezurilor magnetice nrutesc caracteristica. Autor Prof. Dr. Ing. Adriana Trifu 15
Echipamente electronice de automatizare Msurarea vitezei de rotaie (turaia) este realizat n cazul traductoarelor cu impulsuri pe baza msurrii unui parametru ataat 1.7.4.2 unui tren de impulsuri (frecven, numr de impulsuri). Impulsurile pot fi electrice sau electro TRADUCTOARE CU optice. IMPULSURI n cazul metodei electrooptice, succesiunea de2
1
i u R
EF
Ea
Fig. 1.14
3
Metoda electrooptic de deterrminare a vitezei de rotaie1 lentile; 2. surs de lumin; 3. disc cu fante
impulsuri luminoase obinute prin intermediul unui disc cu fante, este transformat ntr-o succesiune de impulsuri electrice. Transformarea o realizeaz un element fotoelectric (EF) (de exemplu o fotodiod). Fotodioda va produce n circuit un curent i , a crui valoare medie este dependent de turaia discului (prin intermediul frecvenei trenului de impulsuri).1.7.5
TRADUCTOARE PENTRU MSURAREA FORELOR I CUPLURILOR
Msurarea forelor poate fi fcut n principiu cu orice traductor parametric de msur a deplasrilor. n serie cu fora ce trebuie determinat este necesar, n acest caz, s se ataeze traductorului un element elastic (un resort). Fora ce trebuie msurat acioneaz asupra resortului deformndu-l ntre anumite limite (proporional cu valoarea forei). Aceast for (F) poate fi msurat prin intermediul organului mobil al traductorului de deplasare. Traductorele pentru msurarea forelor, utilizate frecvent n practic sunt: tensometrice rezistive magnetostrictive piezoelectrice rezistive cu rondele de grafit Traductoarele tensometrice rezistive , reprezint o soluie simpl i de aceea 1.7.5.1 frecvent utiilizat pentru msurarea forelor TRADUCTOARE i cuplurilor. TENSIOMETRICE REZISTIVE 16
Tehnologie general Traductoarele tensometrice rezistive (mrci tensometrice) sunt formate dintr-un fir conductor subire, lipit pe un suport de hrtie sau material izolant (fig. 1.15.a). Traductorul (T) este lipit pe un element elastic (E) (fig. 1.15.b). Elemantul elastic se va deforma sub aciunea forei F (odat cu deplasarea x). Aceast deplasare determin, n anumite condiii, o variaie l a lungimii firului conductor i implicit o variaie a rezistenei sale electrice:
R l =K R l
(1.9)
Parametri traductoarelor tensometrice rezistive au ca valori uzuale: K = 1,9 2,6 (fir de constantan) K = 100 150 (materiale semiconductoare) R = 100 300 1 2
T
F
3 E
x
Fig. 1.15 Traductor tensiometric rezistiv 1.Fir conductor subire; 2. Suport de hrtie sau material izolant 3.Axa deformaiei
Msura forei F cu care este acionat elementul elastic este variaia rezistenei. Aceast variaie este pus n eviden, de obicei, cu un circuit n punte Wheatstone (alimentat n curent continuu sau alternativ). Fenomenul piezoelectric const n apariia unor sarcini electrice pe dou suprafee ale unui cristal, cnd acesta este supus unei fore TRADUCTOARE mecanice. PIEZOELECTRICE Sarcinile electrice apar dac cristalul este supus uneia dintre urmtoarele solicitri: presiune flexiune forfecare traciune torsiune Este important s nu fie solicitat cristalul la mai multe eforturi, pe direcii diferite, n acelai timp. (Polaritatea este diferit n funcie de solicitare: traciune sau compresiune). 1.7.5.2
Autor Prof. Dr. Ing. Adriana Trifu
17
Echipamente electronice de automatizare Dac ntre plcile unui condensator se plaseaz un astfel de cristal (ca dielectric), tensiunea indus E va fi:
E=
Q F Fd F d = = = C C A A
(1.10)
n care: Q reprezint sarcina electric ce - reprezint constanta dielectric a apare pe cristal cristalului C reprezint capacitatea electric a = / [V m / N] reprezint cristalului factorul de calitate al cristalului F reprezint fora ce acioneaz A reprezint aria = Q / F [ C / N] reprezint constanta piezoelectric a cristalului De regul capacitatea cristalului este de ordinul 40 1000 pF. Marele dezvantaj al acestor traductoare const n influena pe care o exercit circuitul exterior al cristalului. (Exemplu: firele de racord, amplificatorul, etc.) asupra msurrii. Aceste influene sunt imprecis determinate i dependente de o serie de factori (forma firelor, umiditate, etc.). Aceste influene pot fi micorate prin luarea unor msuri speciale. Acest dezavantaj este ns minor n raport cu avantajele prezentate de aceast metod n msurarea forelor, a parametrilor vibraiilor mecanice: vitez de rspuns foarte bun (aceste Pentru un cristal de traductoare nu au practic constant de timp); cuar: nu sunt influenate de temperatur = 2,25 * 10-12 C / N 3 2 suport eforturi mari ( 10 daN / m ) = 4,06 * 10-11 F / m nu prezint histerezis permit msurri pn la frecvene de ordinul 109 Hz Cel mai bun cristal, avnd coeficieni piezoelectrici mari, pentru realizarea traductoarelor piezoelectrice este cristalul de cuar. (Alte materiale utilizate sunt Sarea Seignette i titanatul de bariu). Fenomenul de magnetostriciune este caracterizat de deformarea unor materiale magnetice sub aciunea unor stri de magnetizare, ce se modific permanent. Fenomenul de magnetostriciune este reversibil. Funcionarea traductoarelor magnetostrictive se bazeaz pe variaia permeabilitii magnetice () TRADUCTOARE a unor materiale feromagnetice n funcie de MAGNETOSTRICTIVE tensiunile mecanice (), ce apar ntre ele, datorit unor solicitri (fore) macanice aplicate din exterior (fig. 1.16). 18
Tehnologie general B Br0 =0 >0 HFig 1.16
Materialele feromagnetice utilizate poat fi: nichel(Ni), aliaje de fier i cobalt , aliaje de nichel i alumuniu, etc. Dac materialul feromagnetic se afl n interiorul unei bobine (fig. 1.17), datorit unor fore mecanice exterioare, odat cu variaia permeabilitii miezului bobinei are loc variaia reactanei
inductive a nfurrii.Fig. 1.17 Variante constructive de traductoare magnetostrictive a) pentru msurarea forelor de apsare b) pentru msurarea eforturilor de torsiune
a
b
Observaie: Sensibilitatea traductorului este mai mare cu ct lungimea circuitului magnetic este mai mare.1.7.6
TRADUCTOARE PENTRU MSURAREA TEMPERATURII
Temperatura este o mrime de stare. Metodele de msurare a temperaturii sunt extrem de variate. n automatizri se folosesc traductoarele cu termorezisten, cu termocuplu, cu termistoare, iar pentru msurarea temperaturilor nalte ( mai mari de 10000 C) sau n puncte greu accesibile sunt utilizate pirometre de radiaie. De obicei, traductoarele pentru temperatur sunt protejate cu una sau chiar dou teci: una pentru protecie contra contaminrii i una pentru protecie mecanic i contra coroziunii. Funcionarea traductoarelor cu termorezisten se 1.7.6.1 bazeaz pe variaia rezistenei electrice a unui TRADUCTOARE CU conductor cu temperatura, variaie care este TERMOREZISTEN sesizat i transformat n semnal electric. Materialele utilizate pentru realizarea termorezistenelor au coeficient de temperatur ct mai mare i valori reproductibile ale rezistenei ntr-o gam ct mai mare de temperatur. Domeniul principal de msur este ntre 1000 C i 5000C. Autor Prof. Dr. Ing. Adriana Trifu 19
Echipamente electronice de automatizare Materialele folosite sunt: platina (- 2000 C la + 6000 C), nichelul (-600 C la 1800 C) i mai rar cuprul i aliaje din aur i argint. Caracteristicile statice ale termorezistenelor de platin i nichel sunt neliniare, dar pot fi aproximate prin relaii de ordinul doi, de forma: RT = RT0 [1 + (T T0) + (T T0)2 ] (1.11)300 200 100 RT - reprezint rezistena conductorului la temperatura T0 C RT0 reprezint rezistena la temperatura de baz (de regul 00 C) , - reprezint coeficieni ce depind de natura materialului
R[]
Nichel Platin
- 200
- 100
0
100
200
300
400
500
600
T[oC]
Fig 1.18 Caracteristica static a termorezistenelor din platin i nichel Tabelul 1.3 Materialul Gama de temperatu 0600 0200 [grad ] 3,911*10-3 5,43 *10 -3-1
[grad-2] 0,588 *10-6 7,85 *10-6
Platin (Pt) Nichel (Ni) 60 s
Observaii : 10. Valorile uzuale ale termorezistenelor la 00 C sunt: 100 , 50 ,46 , 10 . 20. Caracteristica dinamic se precizeaz de obicei prin constanta de timp T Exemplu: Temorezistena Pt100 are constanta de timp T =
30. Dac mediul msurat este agitat, transferul de cldur se face mai uor ceea ce echivaleaz cu o reducere a constantei de timp.
Funcionarea traductoarelor cu termocuplu se bazeaz pe efectul termoelectric. 1.7.6.2 TRADUCTOARE Efectul termoelectric const n apariia unei CU TERMOCUPLU tensiuni electromotoare ntre capetele libere a dou fire sau benzi metalice diferite, sudate sau lipite la un capt, atunci cnd locul de sudare este nclzit.Prin msurarea t.e.m. i cunoscnd temperatura capetelor nenclzite (reci) se poate determina temperatura locului de sudur.
20
Tehnologie general Tensiunea termoelectric (E) a materialelor din care sunt realizate termocuplurile trebuie s fie ct mai mare, invariabil n timp i ct mai Tabelul 1.4 proporional cu temperatura. 0 Metal Materialele utilizate la realizarea V / C electrozilor pot fi: fier, cupru, nichel, Platin 9 constantan, platin, aur, rodiu, iridiu, aliaje (cromel, alumel, etc.). Platin - Iridiu 13 Ineria temocuplurilor este mare Manganin 8 (constanta de timp poate ajunge pn la 1 2 min). Aur 8 Prin micorarea diametrului i Cromel 31,3 grosimii peretelui de protecie sau chiar nlturarea acestuia, constanta de Alumel - 10,2 timp poate deveni de ordinul Constantan -35 secundelor sau chiar mai puin. Tuburile de protecie sunt metalice (pentru temperaturi maxime ntre 4250 C i 12500 C) sau ceramice (pentru% din temperatura final 100 623 950 o C 950 o C 250 o C
650 o C
1
2
3
4
5
6
7
8
9
t[min]
Fig. 1.19 Rspunsul unui termocuplu pentru diferite temperaturi
temperaturi maxime ntre 10500 C i 16500 C). Valoarea constantei de tempratur depinde i de temperatura final (fig. 1.19). cum se poate deduce din fig. 1.19, la introducerea unui termocuplu, brusc ntr-un cuptor (care poate avea diferite temperaturi), constanta de timp scade de la 5,7 min (la temperatura final de 2500 C) la 1,75 min (la temperatura final de 9500 C) din cauza importanei radiaiei la temperaturi nalte. Termistoarele sunt semiconductoare cu TRADUCTOARE CU coeficient de variaie cu temperatura negativ TERMISTOARE1.7.6.3
Autor Prof. Dr. Ing. Adriana Trifu
21
Echipamente electronice de automatizare (este de aproximativ de 10 ori mai mare dect cel al termorezistenelor uzuale). Fa de traductoarele cu termorezisten, traductoarele cu termistoare mai au urmtoarele avantaje: pot fi executate cu rezisten dimensiuni mult mai mici electric mare (ceea ce permite fire de sunt mult mai rapide conexiune mai lungi ntre punctul de au sensibilitate mare msur i celelalte elemente ale SRA) Dezavantajele traductoarelor cu termistoare sunt legate de mprtierea mare a valorilor rezistenelor nominale i ale coeficientului de temperatur, de domeniul restrns de temperatur n care fincioneaz (-700 C la +3000 C) i de neliniaritatea caracteristicii (fig. 1.20). RT []104 103
Fig. 1.20 Caracteristica static a termustorului
102 10 100 200 300 400 500 600
T [o C]
Observaie: O anumit mbuntire a caracteristicii statice (liniarizare pe un anumit domeniu) se poate obine prin montarea unei rezistene n paralel cu termistorul.
1.7.6.4
PIROMETRE DE RADIAIE
Funcionarea acestor elemente se bazeaz pe msurarea temperaturii unui corp cu ajutorul cantitii i caracteristicilor energiei pe care o radiaz. Pirometrele de radiaie sunt ntrebuinate n
urmtoarele cazuri: mediul contamineaz termocuplurile sau le limiteaz durata de funcionare temperatura care trebuie msurat e mai mare dect cea limit indicat pentru termocupluri. corpul este n micare. este necesar msurarea temperaturii medii a unei suprafee mari.Observaii: 1. Precizia msurrii cu pirometrele de radiaie este redus 2. Pirometrele de radiaie au constant de timp mic (n multe cazuri 0,5 0,75 s).1.7.7
TRADUCTOARE PENTRU MSURAREA PRESIUNILOR
Traductoarele pentru presiuni conin piese i fluide n micare.
22
Tehnologie general 1.7.7.1 TRADUCTOARE CU MEMBRAN ELASTIC Sunt traductoare de presiune cu element elastic (fig. 1.21) Sunt realizate dintr-o camer (ce p este pus n legtur cu presiunea de msurat), prevzut cu o membran elastic. Aceasta se deformeaz sub aciunea presiunii de msurat. Sgeata este dependent de presiunea aplicat membranei. Fig.1.21 Traductor cu membran elastic Membranele utilizate pot fi gofrate, cu profil sinusoidal, trapezoidal, rezervor etc. Asamblnd mai multe R membrane se obine o capsul P0 P manometric. Prin asamblarea mai multor capsule se obine un P burduf.Acestea sunt ataate unui Fig 1.22 traductor de deplasare (fig.1.22). Fig 1.22 Traductor de presiune cu burduf P i resort R .Observaie: Constanta de timp este proporional cu lungimea tubului de legtur dintre proces i traductorul de presiune. Se poate considera c pentru lungimi mici ale
conductei pn la aproximativ 100 m acest timp mort este neglijabil.1.7.2.2
TRADUCTOARE CU SILFOANE
Sunt traductoare cu element elastic. Elementul Fig 1.23 elastic este silfonul (un tub metalic cu perei subiri, ondulat pe suprafaa lateral) (fig. 1.23). Este utilizat mpreun cu traductoare de deplasare. Sensibilitatea traductorului cu silfon este cu att mai mare cu ct este mai mare numrul de ondulaii. Observaie: Metodele de msurare a presiunilor sunt mult mai variate: traductoare cu tuburi Bourdon (tub sub form de arc de cerc care se deformeaz sub aciunea presiunii din interiorul su), traductoare de presiune diferenial cu lichide (sunt utilizate traductoare cu tub n form de U, de tip clopot sau inelare, care msoar diferena a dou presiuni, aceaasta fiind transformat n deplasarea unei coloane de lichid) etc.
Autor Prof. Dr. Ing. Adriana Trifu
23
Echipamente electronice de automatizare
TRADUCTOARE PENTRU MSURAREA DEBITELOR
1.7.8 Procesele pentru reglrile de debite au constante de timp foarte mici, ceea ce impune condiii deosebite legate de constanta de timp a traductoarelor pentru debite. Funcionarea traductoarelor de debit cu seciune 1.7.8.1 de trecere variabil se bazeaz pe dependena ntre debit (QV) i variaia presiunii statice a unui TRADUCTOARE DE DEBIT CU SECIUNE fluid care se scurge printr-o conduct, atunci DE TRECERE cnd n calea sa exist o variaie de seciune. VARIABIL Precizia de msurare este de aproximativ 2 % din debitul maxim, existnd pentru construcii speciale precizii chiar mai bune. Unul dintre cele mai ntrebuinate traductoare de acest tip este ROTAMETRUL cu flotor i tub conic. Flotorul st ntr-o poziie de echilibru ntre greutatea sa i forele care l mping n sus. mpingerea este proporional cu diferena de presiune de dinainte i de dup flotor. Forele provin din mpingerea pe care o exercit fluidul n micare asupra flotorului. Poziia flotorului va caracteriza astfel debitul fluidului. Debitmetrul este direct gradat n funcie de poziia flotorului. Prin utilizarea i a unui traductor de deplasare se poate construi un traductor de debit care s furnizeze informaia ntr-un SRA:1.7.8.2 TRADUCTOARE DE DEBIT BAZATE PE PRINCIPII ELECTROMAGNETICE
Funcionarea traductoarelor de debit electromagnetice se bazeaz pe faptul c ntrun conductor care se mic n cmp magnetic apare o tensiune electric. Tensiunea electromotoare va fi indus chiar n fluidul care se deplaseaz n conduct. Ea apare sub aciunea unui cmp magnetic creat de un electromagnet exterior. Lichidul, care are conductibilitate electric (chir dac aceasta este foarte mic) se va comporata ca un conductor n micare. Prin intermediul a doi electrozi cufundai n fluid poate fi msurat t.e.m. indus. T.e.m. este proporional cu debitul de fluid (prin intermediul vitezei medii de deplasare a fluidului). Metodele de msurare a nivelului pot fi directe sau indirecte.
24
Tehnologie general n cazul metodelor directe traductorul este direct influenat de poziia suprafeei lichidului. Fenomenele care faciliteaz msurarea pot fi de plutire, magnetice, contacte cu suprafaa variabil sau reflexie sonic. n cazul metodelor indirecte, cele mai folosite metode se bazeaz pe msurarea presiunii hidrostatice i pe capacitatea electric. La msurarea presiunii hidrostatice se msoar presiunea ntr-un punct al incintei cu lichid, deducndu-se apoi nlimea lichidului (deasupra punctului de msurare).Metoda poate fi aplict i pentru msurarea debitului n cazuri dificile:
acizi corozivi lichide cu vscozitate mare lichide cu suspens
Avantajele metodei constau n:
precizie mare calibrare stabil gam foarte larg (poate msura cu o precizie satisfctoare debite mici) constant de timp mic (sub 0,5 s)
Metoda capacitii are avantaje fa de celelalte metode de msurare a nivelului: piesele au construcie simpl nu exist piese n micare poate fi aplicat ntr-un domeniu larg de temperatur i presiune a lichidului poate exista prin construcie prottecie antiexploziv constantele de timp sunt mici (sub 1 s)
1.7.9
TRADUCTOARE PENTRU MSURAREA NIVELULUI
Metoda de msurare se bazeaz pe msurarea capacitii ntre un electrod cufundat n lichid i pereii rezervorului sau alt electrod, capacitatea fiind proporional cu nivelul lichidului ntre cei doi electrozi. n czul msurrii nivelului lichidelor conductoare, electrodul este izolat i scufundat n lichid, care va forma cel de-al doilea electrod.
1.7.10
TRADUCTOARE PENTRU MRIMI ELECTRICE
Alegerea unui traductor de curent i tensiune este legat att de parametrii tehnici ct i economici. Printre parametrii tehnici trebuie n special menionai: constrngerile electrice Autor Prof. Dr. Ing. Adriana Trifu constrngerile mecanice 25
Echipamente electronice de automatizare constrngerile termice condiiile de mediu Pentru o aplicaie de o complexitate ridicat, care implic o combinaie a diverselor elemente de mediu: perturbaii magnetice,interferene electromagnetice, fronturi tranzitorii repide, perturbaii mecanice (vibraii, ocuri) etc. sunt necesare informaii suplimentare pentru a definitiva selecia. Exist o gam larg de traductoare de curent i tensiune izolate galvanic, care pot fi considerate standarde n domeniul msurrilor. Numeroasele modele utilizate la ora actual pot fi mprite n 5 grupe principale:1. traductoare cu efect Hall n bucl deschis (tip H); 2. traductoare cu efect Hall n bucl nchis (tip L); 3. traductoare n bucl nchis tip C; 4. traductoare n bucl nchis tip IT; 5. traductoare flexibile pentru curent alternativ;BEfectul Hall
Ic
VH
Efectul Hall este cauzat de fora Lorentz care acioneaz asupra purttorilor de sarcin mobili dintr-un conductor, atunci cnd acesta este supus unui cmp magnetic perpendicular pe direcia curentului. Presupunem o plac subire de material semiconductor traversat longitudinal de un curent de control IC (fig. 1.24). Cmpul magnetic B genereaz o for Lorentz FL, perpendicular pe direcia purttorilor de sarcin mobili ce compun curentul. Aceaasta va provoca o modificare a numrului de purttori de sarcin de pe ambele fee ale plcuei, ceea ce va determina o diferen de potenial numit tensiune Hall, VH: K I C B (1.12) VH = Unde K reprezint constanta Hall, d d grosimea plcuei, iar B este inducia cmpului magnetic.Un traductor Hall va da la ieire o tensiune electric proporional cu cmpul magnetic. Inducia magnetic B este generat de curentul 1.7.10.1 primar IP de msurat i este proporional cu el n TRADUCTOARE CU EFECT zona liniar a ciclului de histerezis. HALL N BUCL DESCHIS Curentul IC este asigurat de o surs de curent constant.
Fig. 1.24
26
Tehnologie general
Conversia curentului primar ntr-o tensiune de ieire
Fig. 1.25
+Ip
Ic
B = K1 IP (1.13)
VH = K IC K1 IP / d (1.14)
VH = K2 IP (1.15)
Traductoarele de tip H se impun prin consum mic, dimensiuni i greutate reduse, rezistena la suprasarcini de curent i un pre relativ sczut. n cazul unor creteri mari ale curentului poate apare o eroare numit offset magnetic, care este maxim dac circuitul magnetic a fost saturat. Domeniul de msur (de curent) la traductoarele de tip H este de 018.000 A; 0 banda de frecven: 0 25KHz; precizia la 25 C este de (+ / -) 1 %; timpul de rspuns este mai mic de 3 7 s; temperatura de lucru este de la 250 C pn la +700 C. Printre aplicaiile tipice pot fi menionate echipamente de sudur electric, surse de energie nentreruptibile (UPS), vehicule electrice, sisteme de conducere energetice, echipamente de electroliz. Aceste traductoare, numite i cu flux zero, au un circuit de compensare integrat, prin 1.7.10.2 care performaele traductorului se TRADUCTOARE DE CURENT mbuntesc. CU EFECT HALL N BUCL NCHIS Traductoarele n bucl nchis furnizeaz un curent secundar (IS), proporional cu VH, care acioneaz ca o reacie pentru compensarea induciei creat de curentul primar (BS = BP ). Se poate scrie relaia: IS = NP IP / NS (1.16) deci curentul secundar, redus cu raportul spirelor este mult mai mic dect curentul primar.
Autor Prof. Dr. Ing. Adriana Trifu
27
Echipamente electronice de automatizare
Principiul de operare al traductorului n bucl nchis
+ +Ip Ic Is Fig. 1.26 VH 0V
-
Traductorul tip L se caracterizeaz printr-o excelent precizie (+ /- 0,5 %), liniaritate foarte bun, deriv sczut cu temperatura, timp de rspuns redus (mai mic de 1s), band larg de frecven (0 200 KHz), domeniul de msur 0 15.000 A, nu introduc pierderi n circuitul de msurat i suport depiri de curent fr s se strice. Principalele limitri sunt date de consumul de la sursa de alimentare i preul mult mai mare dect echivalentele n tehnologia cu bucla deschis. Curentul secundar de la ieire poate fi transformat n tensiune printr-o rezisten de msur RM. Valoarea acesteia trebuie aleas ntre valorile indicate n catalog pentru a respecta puterea disipat n circuitul electronic (RM min) i a evita saturaia circuitului magnetic (RM max). Printre aplicaiile tipice, n afara celor prrezentate la traductoarele n bucl deschis, mai pot fi menionate convertoare pentru servomotoare n robotic, surse de 1.7.10.3 alimentare specifice pentru radare. TRADUCTOARE DE Traductoarele de tensiune cu efect Hall sunt TENSIUNE CU EFECT HALL alctuite dintr-un ansamblu traductor de cureni N BUCL NCHIS ,o rezisten primar R1, prin care se extrage din tensiunea de msurat un curent primar echivalent. Rezistena R1 poate fi extern sau integrat n construcia traductorului. Calculul rezistenei R1, externe, se poate face cu relaia: R1 = (VPN / IPN) RP, (1.17) Unde VPN este tensiunea nominal de msurat, IPN este curentul primar nominal (din catalog), iar RP este rezistena primar intern (din catalog). Puterea instalat va fide 3 4 ori puterea nominal calculat: 28
Tehnologie general PN =I2 PN * R1 (1.18). Traductoarele cu rezistena R1 ncorporat au avantajul calibrrii din fabric la valoarea nominal de tensiune. Gama da msur este limitat la 1,5 VPN. Traductoarele de tensiune se folosesc n multe aplicaii industriale pentru a msura, detecta, monitoriza i regla tensiuni. Domeniul de msur al acestor traductoare poate fi 0 9500 V, pentru o band de frecvene de civa KHz. 0 Precizia la 25 C este de +/- 1%, iar timpul de rspuns este de 10 100 s. Traductoarele tip C permit msurarea 1.7.10.4 curenilor (CT), a curenilor diferreniali (CD) i a tensiunilor (CT) i se caracterizeaz prin TRADUCTOARE N precizie (+/- 0,1 %), band larg de frecvene BUCL NCHIS TIP C (0 250 / 500) KHZ n cazul msurrilor de curent i (0 400 / 700) KHz n cazul msurrilor de tensiune) i deriva cu temperatura redus. Traductoarele din seria C furnizeaz la ieire o tensiune de pn la 10 V. Traductoarele CT au o rezisten foarte mare la suprasarcin, protecie la scurtcircuit, nivele de izolaie foarte mari i performane excelente mpotriva descrcrilor pariale. Printre aplicaii pot fi enumerate: msurarea curentului de magnetizare n transformatoarele de putere sau detecia componentei de curent continuu pentru a evita saturaea (echipamente industriale i traciune electric), sisteme de nclzire inductive, instrumente de msurare de laborator. Traductoarele CD au o rezoluie diferenial foarte bun, posibilitatea de reglare extern a nivelului curentului diferenial de msurat, protecie mpotriva depirii curentului primar. Pentru evitarea saturaiei se impune limitarea curentului principal la o valoare maxim. Aplicaiile tipice ale traductoarelor CD sunt: msurarea i detectarea curenilor de scurgere la pmnt, msurarea curenilor difereniali n echipamentele de traciune electrice (ca o funcie de siguran). Traductoarele CV pot fi folosite att pentru msurarea tensiunilor alternative n invertoare de putere ct i n instrumente de msurare de laborator. Traductoarele de tip C sunt prevzute cu un sistem de compensare a spirelor amper folosind un oscilator electronic. Traductorele tip IT permit msurarea curenilor cu o foarte mare acuratee, liniaritate i cu o 1.7.10.5 nalt stabilitate. Domeniul de msur este 0 TRADUCTOARE N 600 A; banda de frecvene este 0 100 KHz; BUCL NCHIS, TIP IT precizia este de 2 ppm; timpul de rspuns este de Autor Prof. Dr. Ing. Adriana Trifu 29
Echipamente electronice de automatizare 0,3 s. Sistemul const dintr-un cap de msur a curentului, controlat de un modul electronic. Spirele amper din primar sunt compensate de curentul secundar IC multiplicat cu numrul de spire al nfurrii secundare. Aplicaiile tipice sunt: controlul precis al curentului n amplificatoare de gradient pentru imagine n medicin, msurri foarte precise de laborator i metrologie. Traductoarele flexibile de curent alternativ sunt destinate msurrii comode a curenilor 1.7.10.6 alternativi mono sau trifazici i a curenilor TRADUCTOARE pulsatorii. FLEXIBILE DE CURENT Paretea principal a unui astfel de traductor este ALTERNATIV capul de msur care, pentru a efectua msurarea se poziioneaz n jurul conductorului (-ilor), dup care cele dou terminale se conecteaz mecanic. Tensiunea indus este proporional cu variaia curentului i / t, astefel c pentru a reproduce adevrata form a curentului este necesar integrarea acestei tensiuni, funcie care poate fi realizat de un mic modul electronic. Curentul continuu nu poate fi msurat, neproducnd nici o tensiune. Tensiunea analogic la ieire permite conectarea la majoritatea instrumentelor. Ca aplicaii pot fi menionate: echipamente de nclzire inductive, convvertizoare de frecven, analiza armonicelor, msurri de putere, UPS, instalaii de distribuie de medie putere.
REGULATOARE AUTOMATE
1.8 1.8.1 Definiie, clasificare Regulatorul automat primete la intrare mrimea de acionare (semnal obinut n urma comparaiei mrimii de intrare, r, cu semnalul de eroare yr fig1.3) i produce la ieire mrimea de comand u. De regul, din punct de vedere constructiv regulatorul i elementul de comparaie formea z o singur unitate. Traductorul de reacie ofer informaiile asupra desfurrii procesului tehnologic. Aceste informaii sunt prelucrate de RA dup o lege care definete algoritmul de reglare automat (de regul de tip proporional integral derivativ = PID). Criteriile de clasificare a regulatoarelor automate sunt foarte diverse. n tabela 1.5 sunt selectate cteva din aceste criterii:
30
Tehnologie general Tabelul 1.5 CRITERIUL DE CLASIFICARE1. Dup viteza de rspuns a instalaiei tehnologice 2. Dup natura purttorului de informaie
TIPUL RA- regulatoare pentru procese rapide - regulatoare pentru procese lente - regulatoare electronice - regulatoare hidraulice - regulatoare pneumatice - regulatoare mixte (electrohidraulice, electropneumatice) - regulatoare cu aciune continu (liniare sau neliniare) - regulatoare cu aciune discret (cu impulsuri modulate sau numerice) - regulatoare unificate - regulatoare specilizate regulatoare cu reacie dup mrimea de ieire regulatoare cu estimare de stare
3. Dup tipul aciunii regulatorului automat
4. Dup construcia blocului regulator i a semnalelor folosite 5. Dup tipul reaciei folosite
1.8.2 STRUCTURA REGULATOARELOR AUTOMATE O structur a RA, tipic pentru majoritatea regulatoarelor industriale, poate fi considerat cea din figura 1.24.Fig 1.27 Bloc indicare i afiare Comutatorul semnalului de referin De la calculator
yr
Calculul erorii
Unitatea de reglare
Comutare automat manual
Spre EE
Semnalizare optic i acustic
Blocuri de limitare
Echilibrare
Comand manual
Fig. 1.27 Schema bloc a unui RA
Autor Prof. Dr. Ing. Adriana Trifu
31
Echipamente electronice de automatizare Prile componente ale RA sunt interconectate astfel nct s fie ndeplinit funcia de reglare propiuzis, dar sistemul va putea i s indice, s semnalizeze depirea valorilor normale, s permit comutarea automat manual, etc. Eroarea este calculat att n blocul de calcul al erorii ct i n unitatea de reglare. Semnalul de referin poate fi prescris de un operator manual sau poate fi furnizat de la un alt regulator sau de la calculator. Circuitul de echilibrare face ca trecerea sistemului de la un regim la altul s se fac fr variaii brute ale semnalului de comand. Blocurile de limitare menin semnalele din interiorul regulatorului n limitele admisibile. Variantele constructive ale regulatoarelor electronice sunt foarte multe. Varianta unificat este foarte folosit deoarece 1.8.3 conduce la o tipizare i o uniformizare a REGULATORE panourilor de automatizare, permite o mare ELECTRONICE flexibilitate n realizarea unor scheme foarte complexe, faciliteaz producia de serie, etc. n funcie de destinaia lor (pentru procese rapide sau lente), construcia regulatoarelor electronice este foarte diversificat. Criteriul determinant al configuraiei lor este legat de dinamica procesului tehnologic, deci de consatantele de timp impuse. Dinamica tehnologiilor de realizare a circuitelor integrate a permis relizarea unor regulatoare analogice i mai ales numerice cu performane ce nglobeaz funciile unor microcalculatoare. 1.8.4 REGULATORE PENTRU PROCESE RAPIDE Procesele rapide sunt procesele tehnologice caracterizate prin constante de timp sub 10 s. Aceste regulatore trebuie s fie compatibile cu elementele de execuie specifice acestor procese. Procese rapide sunt considerate cele din domeniul acionrilor electrice i echipamentelor electroenergetice.Mrimile reglate n aceste procese tehnologice sunt: mrimi electrice (curent, tensiune, flux magnetic); viteze (liniare i de rotaie); mrimi de poziie (unghiuri i distane);
Particularitile proceselor rapide impun urmtorele condiii regulatorelor electronice: vitez mare de rspuns (sub 100 ms); gam larg de variaie a mrimii reglate; precizie mare a reglrii (1 % sau chiar 0,1 %); nivel redus al semnalelor de la intrare; constan n timp a parametrului reglat;
32
Tehnologie general Pentru asigurarea legilor de reglare se folosesc aceleai scheme de principiu ca i n cazul proceselor lente (difer valorile elementelor pasive R, C din circuitele de corecie, deoarece constantele de timp sunt diferite n cazul celor dou tipuri de procese). Pentru domeniul acionrilor electrice (cu motaore de c.c. i c.a.) exist variante constructive att pentru elemente de reglaj automat unificate ct i regulatoare specializate (destinate unui anume element de xecuie). Pentru exemplificare este prezentat sistemul de reglare unuficat pentru procese rapide UNIDIN . Acest sistem cuprinde att aparatura de msurare (traductoare pentru mrimi electrice tensiune, curent -, de poziie , de vitez, etc.) ct i sistemul de prelucrare a informaiei (regulatoarele) precum i dispozitivele de comand a organelor de execuie electrice. Schema bloc a regulatorului UNIDIN (fig. 1.28) cuprinde elementul de comparaie (format din rezistenele R0 i R0) un amplificator diferenial A (realizat cu tranzistoare cu siliciu) i circuitul de reacie format din impedanele Z1, Z2, Z3. Z1 Ro Ur Ro Uy A +
Z2
Z3
U
Rs
Fig. 1.28 Schema bloc a regulatorului UNIDIN
Cu (+) i (-) au fost notate intrarea neinversoare, respectiv inversoare a amplificatorului diferenial. Tensiunile Ur i Uy sunt cele corespunztoare semnalului de referin r(t) i respectiv sesmnalului de la ieirea cii de reacie, yr. Rezistena Rs este cea corespunztoare rezistenei de intrare a elementului de execuie comandat; mrimea de ieire din regulator este U. Structura circuitului operaional i configuraia reelei Z1, Z2, Z3 dicteaz legea de reglare (fig. 1.29).
Autor Prof. Dr. Ing. Adriana Trifu
33
Echipamente electronice de automatizare
R1 Ro Ro
R1
C
R2 C2 U
U
aR1 Ro C Ro R1
cR2C3
U
U
b
d
Fig. 1.29 Regulatoare electronice a P ; b PI; c PD; d PID;
Calitatea componentelor pasive (rezistoare i condensatoare) din circuitul de reacie al A.Q. influeneaz precizia legii de reglare i comportarea regulatorului UNIDIN. Rezistoarele utilizate sunt bobinate sau cu pelicul metalic (de mare precizie). Condensatoarele sunt cu film plastic sau cu hrtie metalizat. Locul de amplasare al regulatoarelor electronice trebuie ferit de vibraii, praf, gaze, vapori corozivi i radiaii termice. Dac n locul n care este amplasat aparatul atmosfera ambiant conine praf, vapori sau gaze, interiorul aparatului trebuie ventilat n permanen cu aer curat. Procesele lente sunt procesele tehnologice caracterizate prin constante de timp mai mari de 10s. Din cauza vitezelor mici de variaie a semnalelor n cazul proceselor lente, 1.8.5 REGULATOARE constantele de timp iau valori mari.Rezistoarele, PENTRU PREOCESE condensatoarele i amplificatoarele operaionale LENTE utilizate trebuie s fie de bun calitate i cu caracteristici invariante n timp. Regulatoarele utilizate trebuie s aib constante de timp reglabile n limite largi. Un exemplu l poate constitui sistemul de reglare pentru procese lente (fig. 1.30) Blocurile de reglare au fost realizate cu amplificatoare electronice integrate avnd performane ridicate (impedan deintrare foarte mare, cureni de intrare foarte mici pA i cu variaii foarte mici n timp Pentru a limita efectele zgomotelor sunt prevzute filtrri ale semnalelor.Semnalul de ieire al oricrui regulator din 34
Tehnologie general sistemul electronic de reglaj automat din figura 1.30 este un semnal unificat de 420 mA curent continuu. Regulatoarele cu semnale unificate fac parte dintr-un ansamblu de elemente (un grup unitar) denumit sistem unificat. Mrimile de ieire ale traductoarelor i mrimile de intrare i de ieire din celelalte elemente au aceeai natur fizic i variaz pe un domeniu cu aceleai limite (sunt unificate). Exemplu: 210 mA, 15 mA, 420 mA c.c. penreu sisteme unificate electronice. Ec
r
e
1
+3
4
y
2
Fig. 1.30. Schema bloc a unui SRA
1-Modul adaptor de intrare 2-Modul D 3- Modul P+PI 4- Modul convertor de ieire
Modulul adaptor de intrare conine elementul de comparaie EC (care va calcula semnalul de eroare) i un bloc de filtrare (prin care trece numai semnalul de reglat y). Modulul D servete derivrii semnalului y. Modulul P + PI nsumeaz abaterea e(t) i semnalul corespunztor mrimii reglate, dup care rezultanta este trecut prin dou blocuri succesive de tip P i PI. Modulul de ieire asigur semnalului de comand o variaie n gama unificat 420 mA. Regulatorul este prevzut cu elemente de interfa cu calculatorul i poate fi folosit n regim de supraveghere direct dar i n conducerea numeric direct.
Avantaje foarte mari prezint regulatoarele numerice. Ele au multiple posibiliti de memorare a datelor, de folosire pentru mai multe bucle de reglare i de realizare a unor algoritmi de conducere evoluai. Regulatoarele numerice sunt recomandate pentru automatizarea instalaiilor tehnologice cu un grad mare de complexitate. Realizarea diverilor algoritmi de reglare pe cale numeric implic utilizarea unor module funcionale care realizeaz: adunarea, nmulirea, derivarea i integrarea. Performanele regulatoarelor numerice sunt ridicate dac sunt utilizate C (microcalculatoarele) pentru implementarea diverselor funcii de reglare. Informaiile (mrimile) culese din proces sunt convertite n mrimi numerice i sunt prelucrate prin intermediul calculatorului.
Autor Prof. Dr. Ing. Adriana Trifu
35
Echipamente electronice de automatizare Rezultatul prelucrrii este transmis spre proces, dup ce n prealabil a fost realizat conversia digital-analogic a mrimii de comand. Operatorul are posibilitatea de a urmri evoluia parametrilor de interes din cadrul buclelor de reglare cu ajutorul unui sistem de afiare de tip DYSPLAY. Operatorul are i posibilitatea de a configura diverse structuri de bucle de reglare cu diveri algoritmi de reglare (implementai n memoria calculatorului). Echipamentul de calcul preia, n afar de sarcinile regulatoarelor electronice, i alte sarcini: alarme verificarea c valorile unor parametri se menin n limitele nregistrri stabilite etc. calcule de optimizare Utilizarea regulatoarelor numerice permite o flexibilitate mai mare fa de regulatoarele analogice; algoritmul de reglare poate fi uor modificat n cazul n care se modific desfurarea procesuluiLa ora actual, practic regulatoarele analogice sunt nlocuite de regulatoarele numerice cu microprocesor ncorporat. Sistemul modern de reglare din figura 1.31 perrmite combinarea flexibil a pn la 200 de blocuri funcionale, folosind pentru configurare un calculator personal, conectat prin transmisie serial RS 232 C.
36
Tehnologie general
Compensarea caracteristicilor dinamice
Funcii aritmetice
Limitarea valorii de ieire
Reglare
Selectare valoare
Acordare auromat
PIDLiniarizare
Compensare -Temperatur -Presiune -Debit
Alarme
Calculul valorii de ieire
Numrtor i temporizator
Comparator
Funcii logice
Ieiri
Algoritm PID
Autor Prof. Dr. Ing. Adriana Trifu
37
Echipamente electronice de automatizare
1.9
RELEE ELECTRONICE
Releul electronic este un circuit prevzut cu un traductor (destinat urmririi unei mrimi fizice: tensiune, timp, temperatur, flux luminos, etc.) i este capabil s-i modifice starea la o anumit valoare a mrimii supravegheate. Releele electronice au dou funcii importante: 1. msurarea unor valori (care pot fi reglabile) 2. supravegherea i controlul n cazul n care releul electronic face parte dintrun sistem automat de urmrire i reglare a unei mrimi fizice (releul este parte integrant a regulatorului) Releele electronice pot fi clasificate dup natura mrimii fizice pe care o sesizeaz traductorul: de tensiune magnetice de curent capacitive, etc. fotoelectronice de temperatur Releele de tensiune sunt circuite electronice destinate sesizrii depirii unui prag de RELEE DE TENSIUNE tensiune. Depirea acestui prag se manifest I CURENT prin trecerea circuitului de ieire ntr-o alt stare, acesta fiind capabil s comande un element de execuie (un contactor). Releul electronic compar permanent valoarea tensiunii de intrare cu valoarea prestabilit a acestei tensiuni. Releele de curent sunt aplicaii ale releelor de tensiune. Conform legii lui Ohm, orice curent (c.c. sau c.a.) care trece printr-o rezisten genereaz la bornele acesteia o tensiune proporional cu curentul: ux = R ix (1.19) Practic, releele de tensiune pot sta la baza construirii de relee de curent de orice fel. Releele de tensiune, din punct de vedere al tensiunii u de la intrare, pot fi: 1. de tensiune continu 2. de tensiune alternativ1.9.1
EXEMPLE DE RELEE DE TENSIUNE CONTINU A. Circuitul din figura 1.32 este un releu de tensiune continu cu un singur prag, care poate fi utilizat ca detector de polaritate.
38
Tehnologie general Tranzistorul va fi blocat att timp ct UI este mai mic dect 0,6 V (are Fig 1.32 Re valori negative sau pozitive, dar mai mici dect tensiunea de deschidere a RB iB jonciunii BE a tranzistorului T bipolar utilizat). Ui Releu detector de Cnd Ui > 0,6 V, tranzistorul intr polaritate n conducie (n R.A.N.) Creterea n continuare a tensiunii UI va determina intrarea n regimul de saturaie a trnzistorului i limitarea curentului de colector la valoarea ICS = EC / RC (1.20). Acest detector de polaritate are o eroare de 0,6 0,7 V. Pentru tensiuni negative el este neacionat, iar pentru tensiuni pozitive este acionat..Pentru a crete nivelul de tensiune de la 0,6 V la o valoare mai mare, n baza tranzistorului T poate fi +Ec a R1 Ui I1 +Ec ReT Fig. 1.33
+Ec Re R1 I1 R3T
Ui b
Fig. 1.33 Relee de tensiune cu diod Zener a n baz ; b n emitor introdus o diod Zener. Tranzistorul va intra n conducie atunci cnd Ui > UZ (releul este acionat) (1.21) Pentru Ui < UZ releul este neacionat (1.22) Aceste relaii sunt aproximative. n figura 1.30-b dioda Zener este conectat n emitorul tranzistorului. Deosebirea ntre cele dou variante de circuite const n valoarea curentului releului (curentul de colector al tranzistorului): n cazul a: IC = E / Re (1.23) n cazul b: IC = (EC VZ ) / Re (1.24)
Autor Prof. Dr. Ing. Adriana Trifu
39
Echipamente electronice de automatizare B. Circuitul analogic de comutaie care semnalizeaz prin tensiunea de ieire relaia care exist ntre tensiunile pe cele dou intrri (dintre care una este deFig. 1.34 Comparatorul analogic
Uo UoH
Up Ui
C Uo UoL
Ui a b
Fig 1.34 a-schema de principiu b caracteristica static de transfer
referin), poart numele de comparator. Intrarea de referin este caracterizat prin tensiunea Up (tensiune de prag) fig. 1.34. La ieirea comparatorului, n funcie de relaia de inegalitate stabilit ntre Ui i UP, exist urmtoarele stri, diferite de dou nivele distincte de tensiune:Ieire 3 Ieire 4 VIN 4+ In 4IN 3+ IN 3-
14
13
12
11
10
9
8
UI < UP, rezult U0 = U0L (1.25) UI > UP, rezult U0 = U0H (1.26)Orice amplificator operaional poate fi utilizat ca un comparator. Circuitul integrat M 339 din figur conine 4 comparatoare independente i un etaj Timpul de rspuns mare, de 0,3 s, satisface cerinele de compatibilitate cu circuitele TTL n cazul aplicaiilor industriale (comparatoare de limit, multivibratoare, oscilatoare controlate n tensiune, interfa cu circuitele CMOS etc.). Ieirea este compatibil cu circuitele TTL, DTL, ECL, MOS i CMOS. Tensiunea de alimentare de la o surs simpl este 2 36 V. Curentul de alimentare este de 0,8 mA, independent de tensiunea de
M 3391Ieire2
2Ieire
3V+
4IN 1-
5In 1+
6IN 2-
7IN 2+
comun de alimentare.
V+ R1 UIN Vo UREF R2Fig. 1.35 b Circuitul integrat M 339 n montaj comparator
Rs
40
Tehnologie generalalimentare.
Observaie: Un scurtcircuit ntre ieire i V+ produce nclzirea excesiv i chiar distrugerea tranzistoarelor de ieire. Releele de timp sunt circuite electronice care au dou stri: o stare stabil (din care comut la 1.9.2 aplicarea unui semnal de comand) i o stare RELEE DE TIMP instabil (n care evolueaz n urma aplicrii semnalului de comand i care dureaz un interval de timp bine definit, determinat de elementele circuitului). Semnalul de comand este de regul un impuls foarte scurt, aplicat la intrare .Semnalul de ieire este un impuls, de durat fix. Exemple de relee de timp A. Releu de timp cu A.O. n consideraiile urmtoare A.O. este presupus ideal. El este utilizat ca inversor; reacia negativ se realizeaz prin condensatorul C. Cnd comutatoarele sunt pe poziia 1, condensatorul este descrcat, iar tensiunea la ieire este zero.2 1 Ui R1A C
E
2 E
1U2
U2
t
R2
t
a
b
Fig. 1.36 Releu de timp cu A.O. (Integrator Miller) a. Schema; b. Formele de und
Cnd comutatoarele sunt trecute pe poziia 2, A.O. fiind considerat ideal (impedan de intrare infinit, cureni de polarizare nuli, etc.), curentul prin R1 este egal cu curentul de ncrcare a condensatorului. Punctul A reprezint un punct virtual de mas (este la potenial zero). Tensiunea de ieire va avea o dependen liniar E t variabil cu timpul i influenat de mrimea U2 = 1.27 elementelor schemei: E, R1, C. R1 C Autor Prof. Dr. Ing. Adriana Trifu 41
Echipamente electronice de automatizare Aceast tensiune va fi folosit ntr-un detector de nivel care acioneaz releul propiu-zis. B RELEE DE TIMP INTEGRATE Circuitele integrate care permit obinerea de intervale de timp precise poart numele de temporizatoare integrate. Temporizatorul integrat E 555 este un circuit integrat monolitic care genereaz ntrzieri de timp declanate sau oscilaii libere. Este prevzut cu terminale auxiliare de control pentru declanare sau aducere la zero pe frontul de cdere. Ieirea poate comanda circuite TTL. Circuitul poate poate realiza temporizri de la microsecunde pn la ore; poate lucra fie ca astabil fie ca monostabil. E 555 poate fi utilizat pentru temporizri de precizie, generare de impulsuri, generare de ntrzieri de timp, etc. Tensiunea de alimentare este de 18 V.V+ Desc. Prag suss Control
8
7
6
5
E 555E1Masa
2Prag jos
3Ieire
4Etalonare
Fig. 1.37 Configuraia pinilor circuitului e 555
Considernd aplicaia tipic a circuituului M 555 ca monostabil (fig. 1.38), se pot face urmtoarele aprecieri legate de funcionarea circuitului: 1. Circuitul este declanat la aplicarea unui impuls 1 F + negativ de tensiune pe ALO V intrarea PRAG JOS (mai Desc Ieire mic dect 1 / 3 V+ ). Prag sus 2. Condensatorul se va Control ncrca exponenial prin Prag jos 10 nF declanare R, iar ieirea trece n starea sus. Fig 1.38 Monostabil realizat cu E555 3. Condensatorul se va + ncrca pn la 2/3 V cnd comparatorul de sus aduce ieirea n zero i descarc condensatorul prin tranzistorul de descrcare din integrat (montat n paralel). 4.Condensatorul de 1 F (imediat lng capsul) are rolul de a micora vrfurile rapide ce pot apare pe alimentare sau pe mas datorit basculrii acestui circuit. 1.9.3 RELEE FOTOELECTRICE Releele fotoelectrice sunt circuite electronice care sesizeaz depirea unui prag prestabilit al intensitii luminoase. Releul fotoelectric este alctuit din dou blocuri funcionale: 42
Tehnologie general 1. traductorul optoelectronic 2. circuitul de prelucrare a informaiei primite de la traductor (amplificare i comparare) Traductoarele optoelectronice sunt dispozitive fotosensibile, capabile s-i modifice anumii parametri sub aciunea luminii. Funcionarea acestora se bazeaz pe efectul fotoelectric intern. Elementele fotosensibile ce pot fi utilizate sunt: fotorezistena, fotodioda, fototranzistorul, fototiristorul. Fotorezistena poate fi folosit doar pentru procese lente; este foarte sensibil, dar are o inerie mare. n procese rapide poate fi utilizat fotodioda care este rapid, dar are sensibilitate mic. Cel mai sensibil i mai rapid fotoelement este fototranzistorul. Sursele de lumin pot fi: diode electroluminiscente, lumina solar, becuri cu incandescen, dioda LASER, descrcri n gaze, etc. Releele fotosensibile pot avea numeroase aplicaii practice: circuite de separare galvanic, circuite pentru supravegherea flcrii n instalaii care lucreaz cu foc, bariere optice, etc. EXEMPLU: BARIERA OPTIC Barierele optice sunt instalaii care au ca scop sesizarea interpunerii unui obiect n calea unei lumini unidirecionale. R2 R1 E1 E2 CBMieire
Generator impulsuri scurteEmitor Receptor
Fig. 1.39 Barier optic cu raze infraroii
Impulsurile sunt transmise prin LED (n infrarou) i sunt detectate de ctre receptorul optic prin intermediul fototranzistorului FT. Impulsurile regsite n colectorul acestuia vor declana permanent CBM (circuit basculant monostabil) n starea instabil. CBM are un timp de ntrziere (T > T0 ) mai mare dect perioada impulsurilor primite. Interpunerea unui obiect i ntreruperea fasciculului de raze infraroii determin blocarea FT. Circuitul basculant monostabil va trece n starea stabil la ieire. Autor Prof. Dr. Ing. Adriana Trifu 43
Echipamente electronice de automatizare Pentru a nu ntrzia prea mult declanarea semnalului de comand valorile T i T0 trebuie s fie apropiate. Releele de temperatur sunt circuite electronice care sesizeaz o anumit temperatur de lucru i 1.9.4 transmit un semnal de comand. RELEE DE Schema bloc a unui releu de temperatur conine TEMPERATUR urmtoarele elemente (fig 1.38) a) traductorul de temperatur; acesta este format dintr-un element termosensibil (ET) care i modofic anumii parametri cu temperatura i un amplificator (A), care mrete nivelul de tensiune n vederea prelucrrii ulterioare b) releul de tensiune acesta conine un comparator de tensiune (C) care compar tensiunea de intrare cu o tensiune de referin (Up), dnd informaii asupra relaiei stabilite ntre cele dou tensiuni (U este sub sau peste nivelul de referin); informaia furnizat de comparator este prezentat la ieire ntr-un anumit mod n urma prelucrrii adecvate realizat de circuitul de comand-ieire (CI). Principalele tipuri de releu de temperatur sunt realizate cu termorezistene (RTD), termistoare (NTC i PTC) i cu elemente cu jonciune semiconductoare.U Comand
e
ETTraductor
A
C
CI
Releu de tensiune Up
Fig. 1.40 Schema bloc a unui releu de temperatur
1.8.5 RELEE MAGNETICE Releele magnetice sunt acele relee la care acionarea se face pe baza unor efecte ale cmpurilor magnetice. Un prim exemplu l constituie releul electromagnetic (sub aciunea unei tensiuni electrice asupra unei bobine, se poate atrage sau respinge un corp metalic, care are eventual anexate i nite contacte) Un alt exemplu se bazeaz pe efectul corpurilor metalice de a nchide liniile de cmp magnetic. Exist o modificare accentuat a inductivitii atunci cnd liniile de cmp magnetic, creat de spirele unei bobine sunt nchise de un material feromagnetic (fig. 1.39).
44
Tehnologie generali N
Fig. 1.41
i2
Modificarea inductivitii datorit miezului magnetic
Folosirea unei astfel de inductiviti ntr-un oscilator a reprezentat soluia constructiv pentru un tip de releu, numit senzor de proximitate (sesizeaz n vecintatea bobinei prezena unui obiect metalic). Exist astfel de senzori i sub form de circuit integrat, la care trebuie ataat bobina. Un exeplu ar fi circuitul integrat TCA 105N (fig.1.42). Circuitul TCA 105N conine un etaj oscilator, un comutator cu detector de prag i dou ieiri n antifaz, compatibile TTL. Tensiunea de alimentare poate avea valori ntre 4,5V i 20 VV+ = 12V R1 RL
V+
Ieire 2
Ieire 1
NC
8
7
6
5
Miez feromagnetic
1 2 3 4
8 7 6 5
TCA 105N1Masa
2INB
3INE
4NC
Fig. 1.42 a Configuraia pinilor circuitului CA 105N
Fig. 1.42 b Senzor inductiv de proximitate
n funcie de valoarea inductivitii oscilaiile vor fi de amplitudine mai mic sau mai mare. Oscilaiile sunt redresate i apoi semnalul este aplicat unui comparator. n funcie de amplitudinea oscilaiilor este comandat starea tranzistoarelor de ieire (cele dou ieiri aflate n antifaz). Ca valori limit n frecven, circuitul TCA 105N are: frecvene de sesizare a stimulului 40 KHz; frecvena de oscilaie 5 MHz Detectoarele capacitive se folosesc acolo unde 1.9.6 exist obiecte metalice plate, care se deplaseaz ( DETECTOARE jucnd rolul armturii metalice a condensatorului CAPACITIVE ). Principiul este asemntor cu cel al detectorului magnetic prezentat anterior. Starea de oscilaie se modific se ast dat prin modificarea unei capaciti. n funcie de aceast valoare, frecvena de la ieirea din oscilator va avea o anumit fluctuaie care, prin intermediul unui covertor frecven- tensiune va indica o anumit tensiune, dependent de distana dintre armturile condensatorului. Autor Prof. Dr. Ing. Adriana Trifu 45
Echipamente electronice de automatizare C
Obiect metalic plat
Circuit oscilant LC
Convertor frecven tensiune
CoFig. 1,43 Principiul sesizorului de prezen
1.10.1
Elementul de execuie reprezint blocul prin care regulatorul acioneaz asupra instalaiei tehnologice sau procesului reglat. Elementele de execuie (EE) care comand nemijlocit instalaiile tehnologice sunt dependente de acestea, n alegerea lor neexistnd prea multe grade de libertate. Mrimea de intrare n EE este mrimea de comand (u) i mrimea de ieire este mrimea de execuie (m) prin care este influenat desfurarea procesului (fig. 1.3). Un element de execuie este format din : organul de execuie (ventil, ntreruptor, clapet, reostat, etc.) motorul de execuie (servomotorul) Principiul de funcionare a elementelor de execuie se bazeaz, n general, pe modificarea cantitii de substan (energie) produs de o surs sau pe variaia unui debit de fluid prin modificarea seciunii de trecere. Caracteristicile funcionale ale unui EE au n vedere: sigurana n funcionare durata de funcionare caracteristicile statice i dinamice domeniul de liniaritate precizia viteza de rspuns corelarea dintre puterea dezvoltat de elementul de acionare i cea necesar organului de reglare
DEFINIIE; CARACTERISTICI CONSTRUCTIVE I FUNCIONALE; CLASIFICARE
1.10
ELEMENTE DE EXECUIE
Clasificarea elementelor de execuie poate fi fcut dup mai multe criterii. Dup modul cum EE acioneaz asupra procesului sunt dou posibiliti: 46 cu aciune continu cu aciune discontinu
Tehnologie general Dup viteza de variaie a mrimilor reglate exist: elemente de execuie pentru procese rapide elemente de execuie pentru procese lente Dup natura sursei de energie pentru alimentarea motoarelor de execuie exist elemente de execuie: electrice pneumatice hidraulice
1.10.2
ELEMENTE DE ACIONARE ELECTRICE
Elementele de acionare electrice pot fi cu motor electri cde curent continuu (de obicei cu excitaie separat) sau cu motor electric de curent alternativ (monofazate serie cu colector, bifazat sau trifazat). Motoarele de curent continuu ofer posibilitatea reglrii vitezei unghiulare n limite largi. Comanda acestora poate fi fcut prin modificarea tensiunii de alimentare sau prin modificarea tensiunii de excitaie. ioFig. 1.44 iA = ct
Uo
ie
Ja
Ue M, ,m
J
ie,ReComanda motoarelor de curent
b
Fig. 1.44 comanda motoarelor de curent continuu a) comanda pe indus b) comanda pe excitaie
) d i i Observaie: Comanda pe indus este utilizat cnd motorul lucreaz n regim intermitent. Elementele de acionare de curent alternativ sunt utilizate n regim de vitez constant. Ele sunt prevzute, n majoritatea cazurilor cu reductoare de turaie. Tipul de motor utilizat este determinat de puterea necesar. n cazul puterilor mici sunt preferate motoarele bifazate. Pentru puteri mai mari, cerute de acionarea organelor de reglare sunt utilizate motoare electrice asincrone trifazate. Reglarea vitezei acestor motoare poate fi fcut prin reglarea frecvenei tensiunii de alimentare (care se poate reliza utiliznd tehnica numeric).
Autor Prof. Dr. Ing. Adriana Trifu
47
Echipamente electronice de automatizare Elementele de acionare pneumatice pot dezvolta puteri mari la ieire. Ele au o construcie simpl i o durat foarte mare de funcionare;folosesc ca surs de energie aerul comprimat. Elementele de execuie pneumatice pot fi cu 1.10.3 membran sau cu piston. Elementele de ELEMENTE DE execuie cu piston sunt utilizate n aplicaiile ACIONARE PNEUMATICE care necesit puteri maari pentru acionarea organelor de execuie. Domeniile industriale unde exist pericol de incendiu i explozie (industria petrolier, industria chimic, industria minier) impun ca soluie unic pentru problemele de automatizare, utilizarea elementelor de execuie pneumatice.24
5 2
1a
3b
1 8 7
6
3
Fig. 1.45 Elemente de execuie pneumatice a.Elemente de acionare cu membran1. membran elastic 2. dsc de rigidizare 3. tj 4. arc
b.Element de acionare cu piston1.element elastic 2. tj 3. Arc 4. amplificator de putere cu sertar 5,7,8 elemente mecanice cu prghii 6 element de acionare pneumatic cu piston
Elementele de acionare hidraulice sunt utilizate n cadrul sistemelor automate care necesit puteri ELEMENTE DE foarte mari la ieire, reglabile ntr-o plaj foarte ACIONARE 1.10.4 mare de valori cu precizie ridicat. HIDRAULICE Ele folosesc ca agent motor un lichid sub presiune (de regul uleiul); ca i elemente de execuie pneumatice, elementele hidraulice pot fi utilizate n medii explozive sau inflamabile. Fa de elementele pneumatice, dezvolt fore de acionare mult mai mari la acelai gabarit (datorit presiunii de ulei care poate fi mult mai mare); constantele de timp sunt mici; domeniul de viteze este foarte larg i uor reglabil;sensul de micare poate fi uor inversat; durata de via este foarte mare.
48
Tehnologie general Constructiv, se poate considera c exist dou tipuri de elemente de execuie hidraulice; cu micare de translaie i cu micare de rotaie. Ele pot fi, ca i cele pneumatice, cu membran, cu piston etc.
Autor Prof. Dr. Ing. Adriana Trifu
49